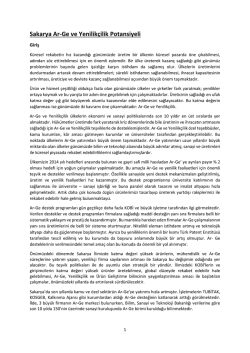
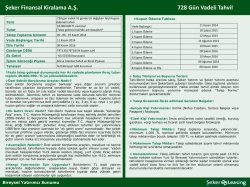
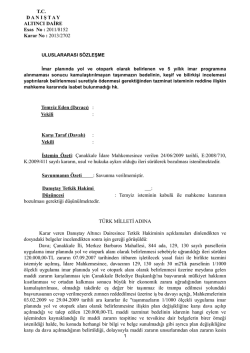
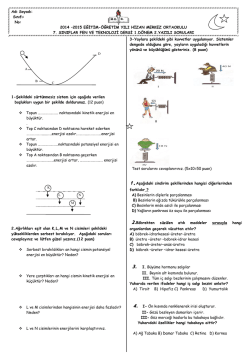
1.4. Uzayda (3-Boyutlu) Eğrisel Hareket Bir maddesel noktanın bir uzay eğrisi boyunca 3-Boyutlu hareketini tanımlamak için, kartezyen (x-y-z), silindirik (r-θ-z) ve küresel koordinatlar (R-θ-ϕ) sıklıkla kullanılırlar (Şekil 1.12). Bu koordinat sistemlerini tanımlamadan önce, Bölüm 1.3.2’de düzlemde eğrisel hareketi tanımlamak için kullandığımız n - t normal ve teğetsel koordinatların uzay hareketi yani 3-boyutlu hareket incelemelerinde kullanışlı olmadığı için burada ele alınmayacağını vurgulayalım. Şekil 1.12 Kartezyen Koordinatlar (x-y-z) İki boyuttan üç boyuta geçmek özel bir zorluk getirmez. R konum vektörü, v hız vektörü ve a ivme vektörü aşağıdaki hale gelecek şekilde Denklem 1.14a-c’deki iki boyutlu bağıntılara sadece z - koordinatını ve iki kez türevlerini eklemek gerekir. (1.39a) (1.39b) (1.39c) 39 Silindirik Koordinatlar (r-θ-z) Silindirik koordinatlar, düzlemsel harekette ele aldığımız kutupsal koordinatların üç boyutlu hali olup, Bölüm 1.3.3’de yaptığımız incelemeye sadece z - koordinatını ve iki kez türevlerini eklemek gerekir. Bu durumda, silindirik koordinatlar için R konum vektörü şu şekilde ifade edilebilir: (1.40) Düzlemsel hareketteki Denklem 1.32 yerine, hız ifadesini aşağıdaki gibi yazabiliriz: (1.41) burada, (1.42a) (1.42b) (1.42c) (1.42d) Benzer şekilde, ivme için, Denklem1.35’e z-bileşeni eklenerek ) (1.43) ifadesi elde edilir. Burada, (1.44a) (1.44b) (1.44c) (1.44d) 40 Küresel Koordinatlar (R-θ-ϕ) Bir maddesel noktanın konumunu belirlemek için radyal bir mesafe ve iki açıdan yararlanıldığı küresel koordinatlar, radar ölçümleri gibi uygulamalarda kullanışlı olmaktadır. Küresel koordinatlarda hız vektörü aşağıdaki gibi ifade edilir: (1.45) burada, (1.46a) (1.46b) (1.46c) (1.46d) İvme vektörü ise, (1.47) Şeklide ifade edilir. Burada, (1.48a) (1.48b) (1.48c) (1.48d) 41 1.5. Bağıl (İzafi) Hareket 1.5.1. Ötelenen Eksenler Önceki konularda, maddesel noktanın hareketini sabit referans eksen takımları yani sabit eksen takımları kullanarak tanımladık. Bu şekilde belirlenen yer değiştirme, hız ve ivme için mutlak ön adı kullanılır. Ancak hareketi tanımlamak veya ölçmek için sabit eksen takımları kullanmak her zaman uygun olmayabilir. Örneğin, söz konusu olan Şekil 1.13’deki gibi birlikte hareket eden gösteri uçaklarının izafi hareket ise, hareketli eksen takımı kullanmak çok daha yararlıdır. Hareketli koordinat sisteminin hareketi, sabit koordinat sistemine göre belirlenmektedir. Yani, Newton mekaniğinde bu sabit sistem, uzayda hareketi olmadığı kabul edilen birincil eylemsizlik sistemidir. Mühendislik açısından, sabit sistem incelenen problem için mutlak hareketin ihmal edildiği herhangi bir sistem olarak alınabilir. Dünya üzerindeki pek çok mühendislik problemi için, sabit referans sistemi olarak dünyanın hareketini ihmal ettiğimiz dünyaya yerleştirilmiş bir eksen takımı alınır. Dünya üzerindeki uyduların hareketi için, orijini dünyanın dönme ekseni üzerinde olan dönmeyen bir koordinat sistemi kullanılır. Gezegenler arası yolculuk için, güneş üzerine yerleştirilmiş dönmeyen bir koordinat sistemi kullanılabilir. Özetle sabit referans sistemin seçimi problemin türüne bağlıdır. Şekil 1.13 42 Hatırlatma Bu bölümde, yalnızca ötelenen (dönme yok) hareketli eksen takımlarını dikkate alacağız. Dönen eksen takımları ile ilgili inceleme rijit cisim kinematiğinde ele alınacaktır. Şekil 1.14’de bir düzlemde farklı eğrisel yörüngeler boyunca hareket eden A ve B maddesel noktalarını ele alalım. B maddesel noktasına ötelenen (dönmeyen) x - y eksen takımının orijinini yerleştirerek, B üzerindeki hareketli konumumuzdan A’nın hareketini gözlemlemeye çalışalım. x - y eksen takımına göre ölçülen A’nın konum vektörü konumu, sabit X - Y eksen takımının orijininden ölçülen dir. B’nin mutlak vektörü ile tanımlanır. Buna göre A’nın mutlak konumu aşağıdaki gibi tanımlanabilir: (1.49) Hatırlatma → A/B indisi: A’nın B’ye göre hareketi (yada B’ye göre A’nın hareketi) anlamına gelmektedir. Hız ve ivmeyi elde etmek için Denklem 1.49’un zaman göre sırasıyla bir ve ikinci türevleri alalaım: (1.50) (1.51) Şekil 1.14 43 Referans koordinat sisteminin yerleştirileceği hareketli B noktasının seçimi keyfidir. Eğer, Şekil 1.15’de gösterildiği gibi, A noktası hareketli referans sistemin yerleştirilir ise, konum, hız ve ivme için izafi hareket denklemeleri aşağıdaki gibi olur: (1.52) (1.53) (1.54) Buradan, (1.55) (1.56) (1.57) olduğunu görürüz. Şekil 1.15 44 Örnek 1.14 45 Örnek 1.15 Şekilde görülen tren 90 km/h sabit hızla bir karayolunun üzerinden geçmektedir. Eğer A otomobili yolda 67.5 km/h hızla hareket ediyorsa trenin otomobile göre izafi hızını, yönünü ve şiddetini bulunuz. 46 47 1.5.2. Birbirine Bağlı Maddesel Noktaların Bağıl (izafi) Hareketi Mühendislik uygulamalarında çok sayıdaki cismin bir birine ip, zincir veya başka bir bağlantı elemanı ile bağlı olduğu durumlar ile sıklıkla karşılaşılır. Böyle durumlarda genellikle, cisimlerinden birinin kinematik değerleri bilinir ve diğer cismin (veya cisimlerin) konum, hız ve ivme gibi kinematik büyüklüklerinin belirlenmesi istenir. Örneğin, Şekil 1.16’da verilen A ve B cisimlerinden, A’nın belirli hız ve ivme ile hareket etmesi halinde B’nin hız ve ivmesinin belirlemeye çalışalım. Böyle bir problemi kolayca çözebilmek için aşağıdaki adımlara dikkat edilmelidir: 1) Sabit bir O noktası ya da referans düzlem seçilir. Bu noktadan (ya da düzlemden) maddesel noktaların her birine uzanacak şeklide mutlak konum vektörleri işaretlenir. Konum vektörlerinin yönü pozitif yön olarak kabul edilir. 2) İp uzunluğunun hareket sırasında sabit kaldığı kabul edilerek, ip uzunluğu için konum fonksiyonları cinsinden bir ifade yazılır. Maddesel nokta kabulünden dolayı makaraların etrafına sarılı olan ip uzunlukları ihmal edilebilir. 3) İp uzunluğu için elde edilen bu ifade, zaman göre türetilerek hız ve ivme ifadeleri elde edilir. Şekil 1.16 48 Bu adımları Şekil 1.16’da verilen sisteme uygulayalım. 1. Adım: O noktası sabit nokta yani referans nokta olarak seçilebilir. 2. Adım: Toplam ip uzunluğu l olmak üzere, konum fonksiyonları cinsinden aşağıdaki ifade yazılabilir: (1.58) 3. Adım: Bu ifadenin zaman göre türevleri alınarak hız ve ivme için aşağıdaki bağıntılar elde edilir. (1.59) (1.60) 1.58 - 1.60 Denklemleri kullanılarak A’nın verilen bir değerine karşılık B’nin değerleri rahatlıkla bulunabilir. Burada dikkat edilmesi gereken husus, özellikle daha karmaşık yapılarda, birden fazla nokta sabit nokta olarak seçilebilmesi durumudur. Bu durumda farklı referans noktalardan elde edilen ifadeler farklı olmasına rağmen doğru yorumlama ile harekete dair aynı sonuçları n elde edileceği unutulmamalıdır. Bu durumu daha iyi anlayabilmek için Şekil 1.17’deki örneği inceleyelim. D noktası sabit nokta olarak seçilecek olursa (Şekil 1.17a), ip uzunluğu için, (1.61) ifadesi elde edilir. Buradan hız ve ivme aşağıdaki gibi türetilebilir: (1.62a) (1.62b) 49 D (referans nokta) D + + O O O (referans nokta) + + (a) (b) Şekil 1.17 Eğer O noktası sabit nokta olarak seçilecek olursa (Şekil 1.17a), ip uzunluğu için, (1.63) ifadesi elde edilir. Buradan hız ve ivme ise aşağıdaki gibi türetilebilir: (1.64a) (1.64b) Görüldüğü gibi 1.62 ve 1.64 ifadeleri birbirlerinden oldukça farklıdır. Ancak basit bir örnek üzerinden aslında aynı şeyler olduklarını ispatlayabiliriz. A cismi düşünelim. 1.62 ifadesine göre = 2 m/s hızı ile itildiğini = -1 m/s olur. (-) işareti B maddesel noktasının nin tersi yönde yani yukarı doğru hareket ettiğini gösterir. 1.64 ifadesine göre yani O noktası referans nokta olduğu durumda, = 1 m/s olur. Hızın pozitif olması B’ nin Şekil 1.17b’deki yönünde yani yukarı doğru hareket edeceği anlamına gelir. Görüldüğü gibi her 1.62 ve 1.64 ifadeleri matematiksel olarak farklı olsalar da fiziksel olarak aynı şeyi öngörmektedirler. 50 Örnek 1.16 B kütlesi 2 m/s’ lik hızla yukarı doğru hareket ediyorsa A kütlesinin hızını hesaplayınız. Çözüm Bu sistem uzunluğu değişen parçalar içeren tek bir ipten oluşmaktadır. C ( ya da D) noktası referans nokta olarak seçilirse A ve B maddesel noktalarını konum koordinatları sırası ile ve olur. Pozitif yön ise konum vektörünün yönü yani aşağı yöndür (↓+). Sistemdeki ipin toplam uzunluğu için aşağıdaki ifade yazılabilir: Bu ifadenin zaman göre türevi alınarak A ve B bloklarının hızları arasındaki ilişki ortaya konabilir. = -2 m/s (yukarı doğru) olduğu zaman = 6 m/s (↓+) olur. 51 Örnek 1.17 Örnek 1.18 52 Örnek 1.19 53 Örnek 1.20 Şekilde görülen system de ipin A ucu aşağıya doğru 3.5 m/s lik hızla hareket ediyorsa, B bloğunun hızını belirleyiniz. 54
© Copyright 2026 Paperzz