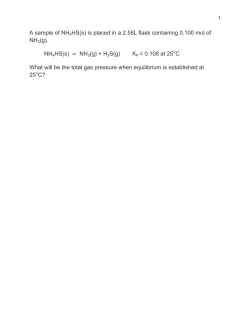
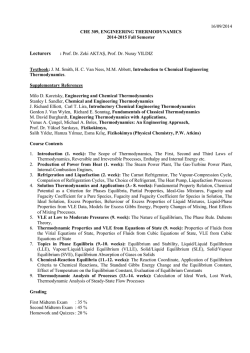
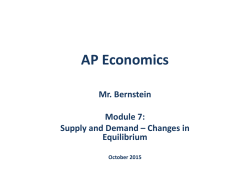
Mukavemet 1 Notları Buradaki notlar “Mechanics of Materials by R.C. Hibbeler" adlı 4 C H A P Tbüyük ER 1 S Toranda RESS kitaptan çevrilerek alınmıştır. Notlar bilgilendirme amaçlı olup öğrencilerimize adı geçen kitabı satın almaları önerilmektedir. Historical Development. The origin of mechanics of materials 1 dates back to the beginning of the seventeenth century, when Galileo performed experiments to study the effects of loads on rods and beams made of various materials. However, at the beginning of the eighteenth Giriş century, experimental methods for testing materials were vastly improved,karşı and at oluşturduğu that time manydirenç experimental theoretical studies Mukavemet adı ile malzemenin yüklere veya and dayanım in this subject were undertaken primarily in France, by such notables as kastedilmektedir. Mukavemet dersi yabancı dilde “Strength of Materials” Saint-Venant, Poisson, Lamé, and Navier.ve “Mechanics of Over the years, after many of the fundamental problems of mechanics Materials” gibi adlar altında verilmektedir. Strengthhad kelimesi olarak tercüme of materials been dilimize solved, itdayanım became necessary to use advanced mathematical and computer techniques to solve more complex problems. edilebilir. Mechanics kelimesi ise kuvvetlerin cisimler üzerindeki etkilerini inceleyen bilim dalı As a result, this subject expanded into other areas of mechanics, such as the theory of elasticity and the theory of plasticity. Research in these fields olan mekanik olarak tercüme edilir. is ongoing, in order to meet the demands for solving more advanced Mukavemet dersinde çeşitli malzemelerden üretilmiş elemanların çeşitli etkiler/tesirler ve problems in engineering. kuvvetler altındaki davranışı, analizi ve tasarımı/dizaynı incelenecektir. Tasarım, yapısal bir elemanının üretileceği malzemeyi ve sahip olacağı boyutları ve geometriyi, kendisine tesir of a Deformable Body etmesi beklenen yüklere/kuvvetlere 1.2 belirli Equilibrium güvenlik sınırlarında dayanacak şekilde Sincegerçekleştirilebilmesi statics has an important için role inyapılması both the development and application belirlemektir. Analiz ise tasarım işlemin gereken tüm of mechanics of materials, it is very important to have a good grasp of its fundamentals. For this reason we will review some of the main principles of statics that will be used throughout the text. işlemler/hesaplamalardır. Mukavemet dersinde eksenel kuvvet, eğilme ve burulma momenti gibi tesirler incelenecektir. External Loads. A body is subjected to only two types of external loads; namely, surface forces or body forces, Fig. 1–1. Kuvvet Dengesi Concentrated force idealization s Surface force G C FR W w(s) Linear distributed load # Body force Fig. 1–1 Surface Forces. Surface forces are caused by the direct contact of one body with the surface of another. In all cases these forces are distributed over the area of contact between the bodies. If this area is small in comparison with the total surface area of the body, then the surface force can be idealized as a single concentrated force, which is applied to a point on the body. For example, the force of the ground on the wheels of a bicycle can be considered as a concentrated force. If the surface loading is applied along a narrow strip of area, the loading can be idealized as a linear distributed load, w(s). Here the loading is measured as having an intensity of force/length along the strip and is represented graphically by a series of arrows along the line s. The resultant force FR of w(s) is equivalent to the area under the distributed loading curve, and this resultant acts through the centroid C or geometric center of this area. The loading along the length of a beam is a typical example of where this idealization is often applied. Dış Yükler: Tekil Yükler (N), Alan Üzerine Yayılı Yükler (N/m2), Çizgisel Yayılı Yükler (N/ m) Mesnet Reaksiyonları: Cismin düşey, yatay veya dönme hareketlerinin engellendiği doğrultularda oluşan kuvvet tepkileri. #1 in order to enable free rotation at their connections. These supports exert a force on a member, but no moment. (1–1) the surface. Hence, the roller exerts a normal force F on the member at ©Fthe= roller, 0 its point of contact. Since the member can freely rotate about a couple moment cannot be developed on the member. ©MO = 0 STRESS TABLE 1–1 FEquilibrium Here, ©Reaction represents the ofrequires allofthe forces body, and Equations of Equilibrium. of asum body both acting on the Reaction Type of connection Type connection © MO isthe the body sum of thetranslating moments of the forces about any point O a balance of forces, to prevent from orall having either on or off the body. If an x, y, z coordinate system is established accelerated motion along a straight or curved path, and a balance of Fy resolved with the origin at point O, the force and moment vectors can be u rotating. These conditions can be moments, to prevent the body from u F into components along each coordinate axis and the above two Fx expressed mathematically by two vector equations equations can be written in scalar form as six equations, namely, Cable ©F = 0 ©MO = 0 F Roller Two unknowns: Fx, Fy External pin One unknown: F Fy ©Fy = 0 (1–1) ©Fz = 0 Fx ©My = 0 ©Mz = 0 ©Fx = 0 ©Mx = 0 (1–2) Internal pin One unknown: F Two unknowns: Fx, Fy Here, © F represents the sum of all the forces acting on the body, and M Fy Often inofengineering practice loading © MO is the sum of the all both the forces abouttheany pointon Oa bodyFcan be represented s of Equilibrium. Equilibrium of amoments body requires x asIfaan system coplanar forces. If is this is the case, and the forces lie in the either on off the body. x, y,orzofhaving coordinate system established f forces, to prevent theorbody from translating F plane, then the conditions equilibrium of the body can be u a balance the origin at pointpath, O,x–y the force and moment vectors canfor be resolved motion along with a straight or curved and of Three unknowns: Fx, Fy, M Smooth support Fixed support One unknown: F withcan only scalarthe equilibrium equations; that is, into# components each coordinate axis and above two prevent the body from rotating.along Thesespecified conditions bethree can equations be written in scalar form as six equations, namely, athematically equations by two vector Denge Denklemleri: # ©F = 0 ©MO = 0 # ©Fx = 0 ©Mx = 0 ©Fy = 0 ©Fz = 0 (1–1) ©My = 0 ©Mz = 0 # ©Fx = 0 ©Fy = 0(1–2) ©MO = 0 1.2 Serbest Cisim Diyagramı (1–3) 7 EQUILIBRIUM OF A DEFORMABLE BODY epresents the sum of all forcesF4 acting on the the loading body, and Often in the engineering practice on a body can be represented MR Here all the moments are summed about point O and so they will be Fof 3 sum of the moments all the forces about any point O and the forces lie in the as a system of coplanar forces. If this is the case, directed along the z axis. off the body. x–y If anplane, x, y, zthen coordinate system isfor established the conditions equilibrium of the body can be Successful application of the equations of equilibrium requires in at point O, the force and moment vectors can be resolved n order to design the horizontal members specified with only three scalar equilibrium equations; that is, complete specification of all the known and unknown forces that act on of this building is first necessary to and nents along frame, each it coordinate axis the above two the body, and so the best way to account for all these forces is to draw indbethe internal at various n written inloadings scalar form as sixpoints equations, namely, section the body’s free-body diagram. along their length. O ©Fx = 0 ©Mx = 0 ©Fy = 0 F1 ©My = 0 (a) # ©Fz = 0 F2 ©Mz = 0 1.2 ©Fx = 0 ©Fy = 0 F ©MO = 0(1–2) 1 1 FR O (1–3) F1 F2 (b) EQUILIBRIUM OF A DEFORMABLE BODY Fig. 1–2 7 F2 (c) 4 adet dış kuvvet ile dengede bulunan cisimden bir kesim alalım. Bu kesime genellikle enkesit MRO and so they will be Here the all loading the moments are can summed about point ngineering practice ondenilir. a body be represented (cross section) 1 directed along thecase, z axis. of coplanar forces. If this is the and the forces lie in the Successful applicationof of equations hen the conditions for equilibrium thethe body can be of equilibrium requires FR tal members complete specification of all the known and unknown forces that act on to scalar equilibrium equations; that is, hnecessary only three arious points the body, and so the best way to account for all these forces is to draw O section the body’s free-body diagram. Internal Resultant Loadings. In mechanics of materials, statics is primarily used to determine the resultant loadings that act within a body. For example, consider the body shown in Fig. 1–2a, which is held in ©Fx = 0 equilibrium by the four external forces.∗ In order to obtain the internal 0 (1–3)the F1©Fy = acting F1 body, it is necessary to pass loadings on a specificFregion within F2 2 ©M = 0 an imaginary section or “cut” through the region where the internal O (c) (b) # loadings are to be determined. The two parts of the body are then Fig.a 1–2 separated, and free-body diagram of one of the parts is drawn, Fig. 1–2b. Kesim sonrası veya üst parçalardan birini force dikkate alalım. Notice that therealt is actually a distribution of internal acting on the Burada “exposed” area of the section. These forces represent the effects of the alıyoruz. moments are summed about point O and so they will be material of the top part of the body acting on the adjacent material of ng the z axis. the bottom part. application of the equations of equilibrium requires Although the exact distribution of this internal loading may be unknown, ecification of all the known and unknown forces that act on we can use the equations of equilibrium to relate the external forces on the so the best wayIntomechanics account for all these forces is to draw td Loadings. of the materials, bottom part of body tostatics the distribution’s resultant force and moment, ee-body diagram. etermine the resultant loadings within a O on the sectioned area, Fig. 1–2c. It FR and MRO, atthat anyact specific point sider the body shown in Fig. 1–2a, which is held in will be shown in later portions of the text that point O is most often O alt parçayı dikkate #2 7 EQUILIBRIUM OF A DEFORMABLE BODY MRO 1 FR O F1 F2 # F2 (c) Kesim bölgesinin ağırlık merkezinde kuvvetlerin bileşkelerini gösterelim. Torsional Moment T MRO Normal N Force FR statics within a held in nternal to pass nternal e then g. 1–2b. on the of the erial of Bending M Moment F2 O V Shear Force F1 # İç kuvvet Fig. 1–2 (cont.) FR F2 (d) bileşkeleri MRO ve FR nin dik eksenlerdeki bileşenlerini gösterelim: Normal Kuvvet (N): Kesim yüzeyine dik kuvvet. Kayma/Kesme Kuvveti (V): Kesim yüzeyine paralel kuvvet. known, Burulma momenti/Tork (T):the Kesite dik eksen etrafında moment/döndürme kuvveti text we will show how to relate sons. on the Later in this FR and MRO, to the distribution of force on the gs, oment, Eğilme momenti (M): Kesite paralel eksenler etrafında moment and thereby develop equations that can be used for 1–2c. It To do this, however, the components of FR and MRO tgn. often mal and perpendicular to the sectioned area must be choose 1.21.2 EQUILIBRIUM OFOF AD BODY EQUILIBRIUM A EFORMABLE DEFORMABLE BODY Düzlem Durumu (2 Boyutlu Analiz) 1–2d. Four different types ofYükleme resultant loadings can then ng and 1.2 EQUILIBRIUM OF A DEFORMABLE BODY lows: ered is 1.2 EQUILIBRIUM OF A9DyEFORMABLE BODY section section F2 F2 yShear F3 F3 ember. Shear F2 F2 Force Force N. This force acts perpendicular to the area. It is V ction y V section y F3 F2 Shear F3 Bending Shear ever the external loads tend to Fpush or pull on the two Force O Bending 1 MOMMoment 2 F2 Force Moment body. V V x O 99 9 11 1 x O MO Bending MO Bending N N Moment Moment Normal Normal . The shear force lies in the of the OF area it Fis BODY x F1 F 1.2 plane EQUILIBRIUM A Dand EFORMABLE 9 O x Force O Force 1 4 F4 N N the external loads F1 # tend to cause the(a)two segments of Normal (b) (b) Normal herefore (a) over one another. F1 Force F1 Force F4 y F4 F3 Shear Fig. 1–3 (b) Fig. 1–3 (b) 1 a) F2 Force (a) ment or torque, T. This effect is developed when the V Loadings. If If the body subjected toto a coplanar system ofof Coplanar Loadings. the body subjected a coplanar system Fig. 1–3 of Mrespect Fig. is 1–3 end to twist oneCoplanar segment the body with tois O Bending Moment shear-force, forces, Fig. 1–3a, then only normal-force, and bendingmoment forces, Fig. 1–3a, then only normal-force, shear-force, and bendingmoment an axis perpendicular to the area. x Fig. 1–3b. If we use the x, y, z Oatsystem . If theCoplanar body iscomponents subjected towill awill coplanar of exist Loadings. If the body is section, subjected to a coplanar system components exist atthe the section, Fig. 1–3b. If we use ofthe x, y, z N nly normal-force, shear-force, and bendingmoment coordinate as shown onon the left segment, NN can bebe obtained byby forces, Fig. 1–3a, thenaxes, only normal-force, shear-force, andthen bendingmoment Normal coordinate axes, as shown the left segment, then can obtained ment, Theapplying moment isthe caused by the Fbending Force 1 will atF4theM. section, Fig. 1–3b. If we use x, y, z ©F = 0, ©F = 0. and V can be obtained from Finally, the components exist at the section, Fig. 1–3b. If we use the x, y, z x y ©F = 0, ©F = 0. applying and V can be obtained from Finally, the y # body aboutx an axis lying within the at to left bend the (b) wntend on the segment, N canon obtained by Mbe bending moment can besegment, summing moments coordinate axes,then as shown left then by Nby can be obtained by about Othe M bending moment can bedetermined determined summing moments about F1 F1 O . V can be obtained ©F =axis), 0. #Finally, d from =the O (the z yV ©M toyto= eliminate the moments ©F 0, (the ©F 0. Finally, applyingpoint and can be©M obtained the O O =0, 0,infrom point zaxis), inorder order eliminate the moments x =O # # 1–3 caused can beFig. determined byby summing moments about the unknowns N and V. M bending moment can be determined by summing moments about caused by the unknowns N and V. O te©M thatOgraphical representation of a moment or torque is = 0, inOorder eliminate the moments point (the ztoaxis), ©M O = 0, in order to eliminate the moments yns is subjected to a coplanar system of mensions as a vector with an associated curl. By the rightN and V. by the unknowns caused N and V. Important Points Important Points rce, shear-force, bendingmoment humb gives the and arrowhead sense of this vector and the on, Fig. If weforuse the x,(twisting y, z dicate the1–3b. tendency rotation or bending). tt segment, Points Points thenImportant N can be obtained by • •Mechanics ofof materials is is a study ofof the relationship between the Mechanics materials a study the relationship between the 0. Finally, obtained from ©Fy =external the loads applied toto a body and the stress and strain caused external loads applied a body and the stress and strain caused mined summing moments about erials isby a• study of the between the byrelationship the internal loads within body. Mechanics ofthe materials is loads a study of the relationship between the by internal within the body. #3 İç Kuvvetlerin İşaretleri 1.2 EQUILIBRIUM OF A DEFORMABLE BODY XAMPLE 1.1 # 1.2 11 EQUILIBRIUM OF A DEFORMABLE BODY Determine the resultant internal loadings acting on the cross section at C of the cantilevered beam shown in Fig. 1–4a. # EXAMPLE 1.1 1 Determine the resultant internal loadings acting on the cross section at C of the cantilevered beam shown in Fig. 1–4a. 270 N/m 270 N/m A B # 3m A C C 3 m(a) B 6m 6m (a) Şekilde verilen çıkmalı kirişte C noktasından alınan enkesitteki iç kuvvetleri hesaplayınız. Fig. 1–4 Fig. 1–4 SOLUTION SOLUTION Çözüm: Support Reactions. The support reactions at A do not have to be Kesim yaptıktan sonra hangi taraf için serbest cisim diyagramını Support Reactions. The support reactions at A do not have to be çizmek ve540içN kuvvetleri determined if segment CB is considered. 540 N determined ifhesaplamak segment CB iskolay considered. 180 N/m daha olacaktır? Free-Body Diagram. The free-body diagram of segment CB is shown in Fig. 1–4b. It isfree-body important to keep theof distributed the 180 N/m MC Free-Body Diagram. The diagram segmentloading CB is on shown Birsegment yayılı yükün şiddeti nasıl hesaplanır? until after the section is made. Only then should this loading n Fig. 1–4b. It be is important to keep the distributed loading on theNC MCC a single resultant force. that the intensity of the Yayılıreplaced yükün byşiddeti/bileşkesi hangiNotice noktadan etki ettirildiğinde, denge denklemlerinin segment until after the section is Cmade. Only then should thisFig. loading distributed loading at is found by proportion, i.e., from 1–4a, VC 2m 4m The magnitude ofofthe m = 1270 N>m2>9yayılı m, w = 180 N>m. yazılması sırasında yükün yerine (Not: Kesme be replaced by aw>6 single resultant force. Notice that thegeçer? intensity the NC kuvveti Cve moment (b) resultant of the distributed load is equal to the area under the distributed loading at curve C is (triangle) found by proportion, i.e., fromalınmadan VC diyagramlarının çizilmesi sırasında yayılı yük dikkate loading and acts through the centroid ofFig. this 1–4a, area.diyagram çizilemez.) 2m 1 1 of the w>6 m = 1270 N>m2>9 w = 180 N>m. The magnitude Thus, F = m, 2 1180 N>m216 m2 = 540 N, which acts 3 16 m2 = 2 m from Kuvvetshown birimiin1kgf = 9.81Newton (b) Fig. 1–4b. resultant of theC asdistributed load is equal to the area under the Equations ofand Equilibrium. Applying equations of of equilibrium oading curve (triangle) acts through thethecentroid this area. we have 1 1 Thus, F = 21180 N>m216 m2 = 540 N, which acts 316 m2 = 2 m from + ©F = 0; : -NC = 0 x C as shown in Fig. 1–4b. Ans. NC = 0 Equations of Equilibrium. Applying the equations of equilibrium + c ©Fy = 0; VC - 540 N = 0 we have 540 N Ans. VC = 540 N 135 N + ©F = 0; : -N = 0 x + c ©Fy = 0; d+ ©MC = 0; C - 540 N12 m2 = 0 -M C NCM=C =0 - 1080 N # m 90 N/m Ans. Ans. = 0 that MC acts in the opposite NOTE: The V negative signNindicates C - 540 direction to that shown on the free-body diagram. Try solving this Ans. VC =AC, 540 problem using segment by N first obtaining the support reactions at A, which are given in Fig. 1–4c. 4m 180 N/m MC 1215 N 3645 N!m B A 1m C #4 1.5 m VC 0.5 m 540 (c)135 N NC N 3m 6m (a) Fig. 1–4 SOLUTION Support Reactions. The support reactions at A do not have to be Serbest Cisim Diyagramı ot have to be determined if segment CB is considered. 540 N The free-body diagram of segment CB is shown Free-Body Diagram. 1–4b. It is important to keep the distributed loading on the N/m t CB is shown in Fig.180 segment until after the section is made. Only then should this loading ading on the MC be replaced by a single resultant force. Notice that the intensity of the d this loading distributed loading at C is found by proportion, i.e., from Fig. 1–4a, NC C B tensity of the w>6 m = 1270 N>m2>9 m, w = 180 N>m. The magnitude of the have be resultantVCof the distributed load is equal to the area under the om Fig.to1–4a, 2m m through the centroid of this area. (triangle) and4acts 540 N ude of the # loading curve 1 1 F = 21180 N>m216 (b) m2 = 540 N, which acts 316 m2 = 2 m from a under the Thus,180 N/m CB is shown C as shown in Fig. 1–4b. of this ding on area. the Equations MC of Equilibrium. Applying the equations of equilibrium = 2loading m from Kuvvet Denge Denklemleri this we have N C B nsity of the C+ : ©Fx = 0; -NC = 0 mf equilibrium Fig. 1–4a, VC 2m 4 m NC = 0 Ans. de of the 540 N 180 N/m MC NC C VC B 2m 4m (b) (b) VC - 540 N = 0 under the + c ©Fy = 0; f this area. Ans. = 2 m from VC = 540 N d+ ©MC = 0; Ans. -MC - 540 N12 m2 = 0 MC = - 1080 N # m equilibrium # Ans. 135 N 90 N/m Ans. 180 N/m MC 1215 N A 540 N 135 N sign indicates that MC acts in the opposite 3645 N!m NOTE: The negative direction that shown on the free-body diagram. Try solving this 90to N/m 1m 180 N/m C noktasındaki iç Bkuvvetleri hesaplamak için C noktasının solundaki parçayı problem using segment AC, by first obtaining the support reactions at 1.2 EQUILIBRIUM OF A D EFORMABLE ODY 15 MC 1215 N Ans. Ans. A, which are given in Fig. 1–4c. olsaydık: A 540 N NC C 1.5 m VC 0.5 m dikkate almış (c) NC C 3645 mesnet N!m the opposite Önce reaksiyonlarını hesaplamamız gerekecekti. 1 1.5 m VC y solving this 1 m 540 N Ans. 135 N 0.5 m tcross reactions at section of 2 kg>m and le moment of (c) 90 N/m 180 N/m MC Ans. 1215 N he opposite 3645 N!m solving so we dothis not reactions at # A 1m NC C 1.5 m VC 0.5 m (c) 1.2 15 EQUILIBRIUM OF A DEFORMABLE BODY at B and the EXAMPLE 1.5 The resultant # med to act in Determine the resultant internal loadings acting on the cross section he centroid of at B of theCpipe shown in Fig. 1–8a. The pipe has a mass of 2 kg>m and is subjected to both a0.75 vertical force of 50 N and a couple moment of ent of pipe is m 1 70 N # m at its end A. It is fixed to the wall at C. B N 25 N gment. equations of # Ans. Ans. Ans. 10.25 m2 = 0 0.5 m D SOLUTION N be solved by considering segment AB, so we do not The problem50 can need to calculate the support 1.25 m reactions at C. Free-Body Diagram. The x, y, z axes are established at B and the A free-body diagram of segment AB is shown in Fig. 1–8b. The resultant N!m force70and moment components at the section are assumed to act in (a) the positive coordinate directions and to pass through the centroid of the cross-sectional area at B. The weight of each segment of pipe is z calculated as follows: WBD = (F 12 kg>m210.5 m219.81 N>kg2 = 9.81 N B)z (MB=)z 12 kg>m211.25 m219.81 N>kg2 = 24.525 N (FB)W 9.81 N y AD These forces themcenter of gravity of each segment. (MB)yact through 0.25 (M ) 0.25 Applying m x Equilibrium. Equations Bof the six scalar equations of B (F ) 24.525 N equilibrium, we have∗ B x C 0.75 m 0.5 m D B 50 N #5 1.25 m 70 N!m A B N D EXAMPLE 1.550 N 5N 1.25 m ment. Determine the resultant internal loadings acting on the cross section A in Fig. 1–8a. The pipe has a mass of 2 kg>m and equations of at B of the pipe shown is subjected to both a vertical force of 50 N and a couple moment of 70 N!m Şekilde # verilen boru sistemi C noktasından ankastre mesnetlidir. B noktasındaki iç kuvvetleri 1 It is fixed to the wall at C. 70 N m at its end A.(a) Ans. hesaplayınız. Borunun metresi 2 kg dır. SOLUTION z by considering segment AB, so we do not Ans. The problem can be solved Ans. need to calculate the support reactions at C. (FB)z Free-Body Diagram. The x, y, z axes are established at B and the (M z free-body diagram ofB)segment (FB)y 9.81AB N is shown in Fig. 1–8b. The resultant force and moment components at the section are assumed to act in (MB)y 0.25 m the positive coordinate directions andmto pass through the centroid of (MB)x B at B. The0.25 the cross-sectional area weight of each segment of pipe is (F ) 24.525 N calculatedBasx follows: 50 0.625m219.81 m y N>kg2 = 9.81 N WN = 12 kg>m210.5 0.25 m2 = 0 Ans. C 0.75 m m2 = 0 BD x WAD = 12 kg>m211.25 m219.81 N>kg2 = 24.525 N Ans. 0.625 m Ans. These forcesAact through the center of gravity of each segment. Equations of Equilibrium. Applying the six scalar equations of 70 N·m 2 indicate? # equilibrium, we have∗ (b) Ans. ©Fx = 0; 1FB2x = 0 Ans. ©Fy = 0; (FB)y = 0 Fig. 1–8 ©Fz = 0; 1FB2z - 9.81 N - 24.525 N - 50 N = 0 Ans. 1FB2z = 84.3 N # ©1MB2x = 0; 1MB2x + 70 N m - 50 N 10.5 m2 - 24.525 N 10.5 m2 - 9.81 N 10.25 m2 = 0 Ans. 1MB2x = - 30.3 N # m B y e shear force moment is is MB = nitude of each on of the force. e, with positive # ©1MB2y = 0; (MB)y + 24.525 N 10.625 m2 + 50 N 11.25 m2 = 0 Ans. (MB)y = - 77.8 N # m Ans. ©1MB2z = 0; 1MB2z = 0 NOTE: What do the negative signs for 1MB2x and 1MB2y indicate? Note that the normal force NB = (FB)y = 0, whereas the shear force is VB = 21022 + 184.322 = 84.3 N. Also, the torsional moment is (MB)y = 77.8 N # m 0.5 m D B 50 N 1.25 m A 70 N!m (a) z (FB)z (FB)y (MB)z (MB)y (MB)x (FB)x B 24.525 N 50 N 9.81 N 0.25 m 0.25 m 0.625 m y x 0.625 m 70 N·m A (b) Fig. 1–8 and the bending moment is MB = TB = 2130.322 + 1022 = 30.3 N # m. *The magnitude of each moment about an axis is equal to the magnitude of each force times the perpendicular distance from the axis to the line of action of the force. The direction of each moment is determined using the right-hand rule, with positive moments (thumb) directed along the positive coordinate axes. #6
© Copyright 2026 Paperzz