Sistemi di sicurezza meccatronici innovativi (cablati e
wireless) per applicazioni ferroviarie, aerospaziali e
robotiche (MASSIME)
1
1
1
1
Maria Pia Fanti , Giuliana Rotunno , Agostino Marcello Mangini ,Mario Nicola Armenise ,
1
1
1
1
Caterina Ciminelli , Ilaria De Bene , Francesco Dell'Olio , DavidePalmisano , Antonella
1
1
1
1
1
D’Orazio , Vincenzo Petruzzelli , Giovanna Calò , Marco Grande , Ruggiero del Curatolo ,
1
2
2
2
Lucia Colamonaco , Mario Daniele Piccioni , Salvatore Marzano , Dora Foti , Mariella
2
2
2
2
2
Diaferio , Pilade Foti , AguinaldoFraddosio , Anna Castellano , Francesco Paparella ,
2
3
3
3
Giovanni Pimpinelli , Carmine Pappalettere , Caterina Casavola , Claudia Barile , Vincenzo
3
3
3
3
Moramarco , Giovanni Pappalettera , Luigi Mangialardi , Tommaso Contursi , Umberto
3
3
3
Galietti , Leonardo Soria , Davide Palmieri
1
Dipartimento di Ingegneria Elettrica e dell’Informazione, Politecnico di Bari
{mariapia.fanti,giuliana.rotunno,agostinomarcello.mangini,marionicola.armenise, caterina.ciminelli,
francesco.dellolio,antonella.dorazio, vincenzo.petruzzelli, giovanna.calo,marco.grande}@poliba.it
[email protected], [email protected]
2
Dipartimento di Scienze dell’Ingegneria Civile e dell’Architettura, Politecnico di Bari
{mariodaniele.piccioni, salvatore.marzano, dora.foti, mariella.diaferio, pilade.foti, aguinaldo.fraddosio,
anna.castellano, francesco.paparella, giovanni.pimpinelli}@poliba.it
3
Dipartimento di Meccanica, Matematica e Management
{carmine.pappalettere, katia.casavola, claudia.barile, vincenzo.moramarco, giovanni.pappalettera,
luigi.mangialardi, tommaso.contursi, umberto.galietti, leonardo.soria, davide.palmieri}@poliba.it
Abstract: This paper shortly describes the activities of Research Groups of Politecnico di
Bari in the framework of Project “MASSIME-Mechatronic innovative safety systems (wired
and wireless) for railway, aerospace and robotic applications”
Funding: MIUR
Program: PON “2007-2013 “ – Programma Operativo Nazionale “Ricerca
e Competitività”, Asse I: Sostegno ai mutamenti strutturali (2012-2015)
ID Code: Domanda PON02_00675 “Distretto ad Alta Tecnologia”
Cod.ID Progetto “PON02_00576_3333585”
Role of POLIBA: Partner
Contactpersonfor Politecnico di Bari: Antonella D’Orazio
Total Budget: :€ 24.447.978,00
Poliba Budget: :€ 2.748.726,00;
Starting date: January 1, 2012
End date: June 30, 2014
Keywords:Meccatronica, Trasporti, Aerospazio, Robotica, Sensori
Page 1 of 10
1
Introduction
Il progetto Massime si propone di sviluppare sistemi di sicurezza meccatronici
innovativi (cablati e wireless) per applicazioni ferroviare, aerospaziali e robotiche,
costituiti da combinazioni di sensori e tecnologie microelettroniche e supportate da
una adeguata infrastruttura software .Di seguito sarà riportata una breve sintesi delle
attività di ricerca dei Ricercatori del DEI, DICAR e DMM coinvoltinel progetto.
2
Elaborazione di tecniche di diagnostica predittiva per un
iniettore automobilistico
Nell’ambito del progetto MASSIME ed in riferimento allo ”Studio ed elaborazione di
tecniche di diagnostica predittiva basata su modelli implementabili su banco di test e
collaudo per componentistica meccatronica”si sono distinte tre attività di ricerca:
1. Analisi delle tecniche di diagnostica predittiva basata su modello;
2. Studio e la concezione di un sistema di diagnostica predittiva basata su
modello per banco di test e collaudo componentistica meccatronica;
3. Progettazione del sistema di diagnostica predittiva basata su modello.
Attraverso l’attività di analisi è emersa una costante crescita da parte del management
aziendale nella consapevolezza che, la manutenzione, è fondamentale nella gestione
operativa di uno stabilimento industriale. Inoltre, i requisiti fondamentali necessari ad
un sistema industriale, per attivare contromisure appropriate in presenza di
malfunzionamenti e guasti risiedono nella supervisione e nella diagnosi automatica,
efficace e robusta.
Tutto questo rende necessario l’utilizzo di sistemi capaci di determinare situazioni
anomale e di ripristinare il corretto funzionamento del sistema in modo automatico.
Si tratta, pertanto, di un processo di monitoraggio e supervisione permanente del
sistema, le cui principali attività sono: Fault detection; Fault isolation; IntelligentFault
Diagnosis.Partendo dalla suddetta analisi, l’ attività di ricerca ha preso in
considerazione un interessante caso di studio: l’Iniettore Automobilistico. Il processo
produttivo degli iniettori prevede una o più fasi di test durante le quali è necessario
verificare il corretto movimento dello spillo e misurare la sua corsa, definita
“Lift”.Per poter progettare il sistema di diagnostica applicato al caso di studio, è stato
necessario concentrare le attività di ricerca sulle tecniche di testing e di diagnostica
basate sullo stato oltre che sugli algoritmi di stima dei parametri del sistema.
L'identificazione del sistema è considerato un metodo utile ed efficace per costruire
modelli matematici di sistemi dinamici da dati misurati. I dati sono solitamente
ottenuti tramite un campionamento del segnale (o segnali) di ingresso ed uscita e
l'elaborazione avviene tramite opportuni algoritmi numerici.
Pertanto, si è reso necessario esaminare alcune tecniche che permettono
l’identificazione del modello in esame analizzando una serie di metodi operativi.
Tra le diverse tipologie esistenti ed in base al nostro caso in studio, si è focalizzata
l’attenzione verso tre modelli appartenenti alla tipologia “Black Box Modelling”.
Successivamente, si è reso necessario definire l’equazione del moto dell’iniettore al
fine di individuare le forze agenti durante il suo funzionamento e definire possibili
relazioni con lo spostamento(Lift) dell’ancorina al suo interno.
Definitele equazioni del motonella fase di apertura e di chiusura dell’iniettore e,
al fine di determinare una relazione tra Lift e moto dell’ancorina, si è partiti dalla
seguente considerazione:“Il moto dell’ancorina in due iniettori di stessa tipologia ma
con Lift diversi necessariamente deve dipendere dalla forza elettromagnetica che si
genera ai capi degli iniettori stessi”.
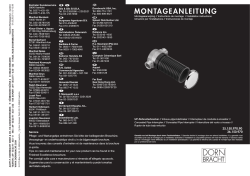
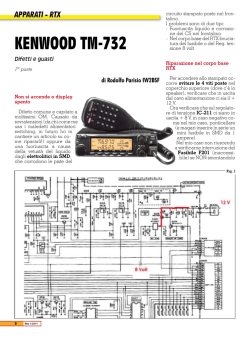
Per ottenere delle conferme sulla suddetta considerazione e per capire come il Lift
influisca sulla forza elettromagnetica ai capi dell’iniettore si sono condotte e si stanno
ancora conducendo una serie di prove sugli iniettori che prevedono il pilotaggio e la
caratterizzazione dell’andamento dell’ancorina durante la fase di apertura e chiusura
dello stesso. La Figura1mostra un esempio di pilotaggio effettuato.
5
4.5
iniettore 51
iniettore 52
iniettore 53
iniettore 54
iniettore 55
iniettore 56
iniettore 57
iniettore 58
iniettore 63
4
3.5
3
2.5
-2
-1
0
1
2
3
4
-3
x 10
Fig.1.Andamento della corrente in risposta ad un impulso di tensione di un’onda quadra per
iniettori di stessa tipologia ma con differenti lift (vedi legenda)
3
Tecniche sperimentali per la diagnosi di sistemi
meccatronici
Un aspetto cruciale per il progetto, la validazione e la verifica della vita in servizio di
sistemi innovativi, costruiti con nuovi materiali, è lo sviluppo di procedure di prova
per la caratterizzazione della risposta meccanica, la diagnosi di danneggiamento e
difetti, e l’analisi di stati di sforzo applicati e residui.
Nell’ambito del progetto di ricerca Massime sono stati studiati approcci innovativi per
prove ultrasoniche basati sull’impiego di tecniche che non prevedono il contatto
sonda/campione: prove ad immersione, prove basate sull’impiego di sensori
elettromagnetici (EMAT), prove laser-ultrasoniche, per i materiali e le strutture della
robotica e dell’aerospazio. L’approccio seguito prevede lo studio simultaneo da una
parte dei problemi legati alla modellazione teorica dei fenomeni fisici coinvolti nelle
prove, e dall’altra degli aspetti più direttamente legati al setup sperimentale.
Page 3 of 10
Come esempio significativo della ricerca, si descrive l’applicazione delle suddette
tecniche ultrasonore alla caratterizzazione del comportamento meccanico di un
composito anisotropo GFRP. L’impiego di un setup goniometrico innovativo per
prove ultrasoniche ad immersione ha consentito la caratterizzazione non distruttiva
della risposta elastica di un composito laminato multistrato in fibra di vetro, costituito
da 11 strati, con rinforzo unidirezionale di uno strato disposto in direzione ortogonale
al rinforzo unidirezionale degli strati limitrofi (composito del tipo cross ply). Tale
materiale può essere modellato come linearmente elastico ortotropo, per cui la
descrizione della sua risposta meccanica richiede la specificazione di 9 moduli elastici
indipendenti.
L’apparecchiatura goniometrica per prove ultrasoniche ad immersione consente la
misura della velocità di onde ultrasoniche longitudinali e trasversali all’interno del
materiale; le onde trasversali sono generate per conversione di modo, al variare
dell’angolo di incidenza fra il raggio ultrasonoro emesso dalla sonda e la superficie del
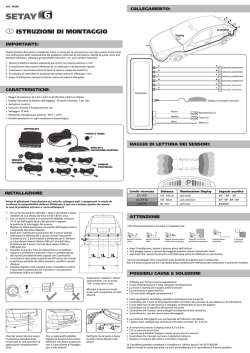
campione. I grafici in Fig. 2 mostrano la correlazione fra la velocità ultrasonica e il
suddetto angolo di incidenza per propagazione nel piano 1-2, ortogonale alla direzione
di una famiglia di fibre (analoghe misurazioni sono state fatte per il piano 1-3,
ortogonale alla direzione dell’altra famiglia di fibre, e per un piano inclinato a 45°
rispetto alle direzioni delle fibre). Attraverso l’inversione delle equazioni di
propagazione, dedotte all’interno della teoria dell’elastodinamica, è possibile
determinare i 9 moduli elastici indipendenti a partire dalle misure di velocità
ultrasonora. La procedura è stata validata confrontando i valori dei moduli elastici
stimati a partire da misure di velocità ultrasonica con quelli ottenuti attraverso
convenzionali prove meccaniche. Si osservi che l’approccio ultrasonoro permette di
determinare tutti i 9 moduli elastici, mentre le prove meccaniche consentono di
accedere facilmente solo ad alcuni di essi, come ad esempio quelli nelle Tabelle 1 e 2.
Si osserva infine che la piccolezza del passo angolare di rotazione del campione
possibile con il setup sperimentale descritto permette di identificare chiaramente la
presenza di più strati, i quali corrispondono a salti nei grafici di velocità ultrasonica
(cfr. Fig. 2): ciò può consentire di individuare accuratamente danneggiamenti,
delaminazioni e micro-fessure.
Fig.2.Propagatione nel piano 1-2: velocità di fasevp–angolo di incidenzaθ
Tabella 1.Moduli elastici nel piano 1-2.
Elastic moduli
evaluated by
ultrasonic tests
Elastic moduli
evaluated by
mechanical tests
Young
modulus [MPa]
Poisson’s ratio
Shear modulus
[MPa]
E3 = 30.800
ν12 = 0,11
G12 = 13.873
E3 = 28.425
ν12 = 0,10
G12 = 12.920
Tabella2.Moduli elastici nel piano 1-3.
Elastic moduli
evaluated by
ultrasonic tests
Elastic moduli
evaluated by
mechanical tests
4
Young
modulus [MPa]
Poisson’s ratio
Shear modulus
[MPa]
E2 = 29.400
ν13 = 0,13
G31 = 13.008
E2 = 27.219
ν13 = 0,12
G31 = 12.162
Caratterizzazione strutturale del velivolo a terra e in volo
Il gruppo di lavoro del lab. di Meccanica Sperimentale e del lab. EMILIA si occupa
della caratterizzazione strutturale del velivolo a terra, progetta ed esegue i test
sperimentali per la certificazione del velivolo, studia i principali parametri deformativi
in condizioni di volo. Il velivolo in studio è un velivolo ultraleggero la cui parte
strutturale è costituita per il 97% in materiale composito fibra di carbonio. A seguito
di uno studio preliminare del velivolo e dei requisiti normativi, si è avviata la verifica
dei carichi strutturali sui seguenti componenti:
• Engine mount
• Main landing gear (MLG)
• Nose landing gear (NLG)
• Wings (condizioni di carico simmetriche e asimmetriche)
La normativa che impone i vincoli più restrittivi ed alla quale si farà riferimento è la
CS-VLA che riguarda tipologie di aeromobili fino a 750 kg. Di seguito sono riportati i
principali risultati su carrello anteriore e posteriore. Tutti test sono stati eseguiti
utilizzando un banco prova progettato ad hoc.
Dall’analisi dei primi risultati ottenuti sono stati definiti i target per ogni tipo di
normativa considerata. Al momento si sta lavorando per introdurre degli interventi
correttivi al fine di ottenere il superamento anche della CS-VLA che presenta i
requisiti più restrittivi.Per quanto riguarda i test in volo, si sta procedendo con
l’individuazione del componente da analizzare in volo e la definizione degli obiettivi
da perseguire. I test sperimentali serviranno sostanzialmente a misurare in condizioni
di lavoro reale le sollecitazioni (carichi e deformazioni) sull’ala, in modo da
Page 5 of 10
confrontare tali risultati con quelli provenienti dall’analisi agli elementi finiti e validare
i modelli utilizzati.
Figura 3: Test statico su carrello anteriore
Il rilievo di carichi in volo passa in genere per il rilievo delle azioni interne. Pertanto,
considerando una generica sezione alare (cfr. figura 4a), se si vogliono disporre ponti
estensimetrici per il rilievo delle principali sollecitazioni è necessario considerare che
la risultante delle azioni agenti sul tronco di struttura compreso tra la sezione stessa e
l’estremità alare è riconducibile ad un taglio, sostanzialmente perpendicolare al piano
alare medio (o almeno la componente normale a tale piano del taglio totale è quella di
maggiore interesse), ad un momento flettente e ad un momento torcente.
(a)
(b)
Fig.4: (a) Schema di una sezione alare generica, (b) Disposizione dei
punti di misura
Per tale ragione si è pensato di disporre 3 ponti estensimetrici dedicati alle 3
sollecitazioni principali (cfr. figura 4b). In linea del tutto generale, ritenendo valido il
principio di sovrapposizione degli effetti ed il comportamento elastico lineare della
struttura sotto carico, è possibile affermare che il segnale elettrico in uscita dall’iesimo ponte estensimetrico posto in corrispondenza della sezione strumentata dell’ala
sia una funzione lineare delle tre azioni interne applicate ed insistenti sulla sezione
stessa. In corrispondenza della sezione strumentata vengono posizionati 3 ponti
‘indipendenti’, sensibili ognuno primariamente alle tre principali azioni interne, in
modo tale che risolvendo una equazione matriciale, attraverso l’uscita dei ponti
estensimetrici localmente installati si risale alla misura sperimentale dei carichi agenti
sul velivolo.
5
Diagnostica e monitoraggio strutturale di componenti
ferroviari basato su tecniche vibrazionali
L’unità di ricerca operante negli ambiti della Meccanica delle Vibrazioni e dei Metodi
Termici per la Diagnostica Strutturale è presente in tre attività: la A8.6,
Caratterizzazione sperimentale con tecniche EMA e termo-elastica/termografica di
ruote o sale montate al primo montaggio e a intervalli chilometrici prefissati per
valutare l’insorgenza di difetti,la A12.2, Implementazione di un sistema predittivo
intelligente, basato su tecniche di «automated» OMA (AUTOMA) per il monitoraggio
continuo di sale e carrelli durante la marcia,la A14.4, Prove vibrazionali su shaker di
grossa taglia. Nel seguito si discutono le prime due attività, mentre l’ultima è pensata
per essere di supporto al testing dei prototipi.
A8.6L’analisi modale sperimentale (EMA), nota anche come Input-Output Modal
Analysis, consente di caratterizzare dinamicamente un componente strutturale,
misurando le sollecitazioni esterne agenti sullo stesso e i relativi segnali di output.
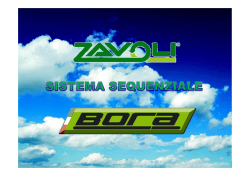
Fig.5.Esempi di ruote ferroviarie danneggiate
I parametri modali, cioè le frequenze naturali, i fattori di smorzamento e le forme
modali, sono caratteristiche intrinseche del sistema in esame, che possono essere
stimatiin una struttura non danneggiata, master, ed in seguito utilizzati come valori di
riferimento per valutare eventuali scostamenti non fisiologici. Tali scostamentisono
Page 7 of 10
indice dellaa presenza di danneggiamenti e difettosità e vengono interpretati attraverso
l’utilizzo dei metodi Traditional-type
Traditional
vibration-based structural damage detection
(TTDD). In Fig.5si
si riportano esempi di aree danneggiate in ruote ferroviarie,
osservabili attraverso
erso la tecnica descritta.
A12.2L’Analisi
L’Analisi Modale Operazionale, altrimenti detta Output-only
Output
Modal Analysis
(OMA), consente di stimare i parametri modali misurando le sole uscite del sistema.
Alla base di tale tecnica vi è l’ipotesi forte che tutte le forzanti agenti sul sistema in
esame siano accomunabili a rumori bianchi non correlati tra loro. La scelta di adeguati
algoritmi di stima è fondamentale per la buona riuscita del processo di estrazione
modale. In particolare,gli algoritmi più utilizzati sono lo Stochastic Subspace
Identification, SSI, e il Poly MAX di LMS.
Per il monitoraggio strutturale,la tecnica operazionale risulta essere la più idonea,
poiché l’analisi del sistema in esame è effettuata nelle sue reali condizioni di esercizio.
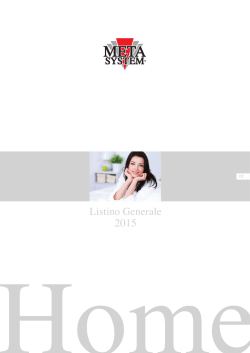
Fig.6.Modellohalfcar
Modellohalfcar (a) e (b) diagramma di stabilizzazione costruito impiegando un
algoritmo di estrazione modale a segnali simulati tramite il modello (sensori virtuali).
Tale tecnica si rivela assolutamente vincente per l’analisi di strutture civili, per le quali
q
le ipotesi sono ampiamente soddisfatte. In applicazioni per le quali esse vengono in
parte o del tutto violate, la metodologia non è applicabile nella sua formulazione
classica. In particolare,in riferimento all’OMA di un veicolo ferroviario,trattandosi di
un sistema a ingressi ritardati, l’impiego di un algoritmo classico di stima rende
sostanzialmente impraticabile l’estrazione dei parametri modali (Fig.6).
6
Unità di acquisizione
acquisizione immagini basata su sensori CMOS e
unità inerziale basata su sensori MEMS
Il monitoraggio della geometria del binario è una funzionalità chiave per i sistemi di
ispezione ferroviaria. Tale monitoraggio può essere compiuto tramite misure inerziali
in tempo reale dell’assetto del treno e/o triangolazione laser. Nell’ambito del progetto
MASSIME, stiamo sviluppando due unità, una unità
unità di acquisizione di immagini da
includere in un sistema di triangolazione laser e una unità inerziale triassiale con
applicazioni
ni nel campo del monitoraggio della geometria del binario. I componenti di
entrambe le unità sono prodotti commercialmente disponibili, che sono stati
selezionati tenendo conto dei vincoli imposti dallo specifico dominio applicativo.
Un sensore di immagine per il monitoraggio della geometria del binario dovrebbe
avere risoluzione almeno pari a 1024 x 1024 pixel e un range dinamico > 60 dB. Il
perso della telecamera dovrebbe essere minore di poche centinaia di grammi, il suo
frame rate all’circa pari a 100 fps e il suo consumo di potenza minore di pochi W. Le
caratteristiche tipiche delle telecamere basate su sensori di immagine
CMOS(Complementary Metal-Oxide-Semiconductor) sono in linea con tutti questi
requisiti. Sulla basa di una accurata market review, abbiamo selezionato la telecamera
CMOS più adatta all’unita di acquisizione di immagini, il cui progetto è attualmente in
corso.
La telecamera CMOS sarà dotata di un sistema di lenti che introducono distorsioni
lineari e non lineari dovute ad imperfezioni nella fabbricazione delle lenti stesse. Per
compensare le distorsioni abbiamo utilizzato il modello Brown-Conrady modificato.
Il modello delle distorsioni è stato già implementato mentre la sua validazione
sperimentale sarà possibilmente effettuata in collaborazione con il partner di progetto
MerMec. Inoltre sono state studiate le tecniche per la caratterizzazione sperimentale
delle telecamere CMOS secondo lo standard EMVA 1288. In particolare, sono stati
ottimizzati i metodi di misura per il rapporto segnale/rumore, la corrente di buio e
l’efficienza quantica spettrale. È stato progettato il set-up per la misura della sensibilità,
della linearità e della disuniformità. La configurazione del set-up è mostrata in Fig. 7.
La sorgente luminosa avente un dimetro pari a D illumina in modo omogeneo il
sensore di immagine, che ha un diametro pari a DS. La distanza d tra il sensore e la
sorgente luminosa dovrebbe essere almeno 8 volte più grande di D. Elaborando i dati
all’uscita del sensore, possono essere stimate le caratteristiche fondamentali del sensore
stesso.
Per i sensori da includere nell’unità inerziale, abbiamo selezionato la tecnologia MEMS
(Micro-Electro-Mechanical Systems) visto che essa consente miniaturizzazione, basso
costo e basso consumo di potenza.
Fig.7.Set-up per la caratterizzazione del sensore di immagini.
I requisiti imposti dalla specifica applicazione al giroscopio e all’accelerometro MEMS
sono stati attentamente studiati. È stata portata a termine una accurata market review
sui sensori inerziali MEMS, valutando anche la loro robustezza e resistenza alle
vibrazioni. A conclusione di questa attività è stato selezionato, per lo sviluppo
dell’unità inerziale che è tutt’ora in corso, un system-in-package che include un
giroscopio triassiale, un accelerometro triassiale, un magnetometro triassiale, un
sensore di temperatura ed un sensore di pressione.
È stato sviluppato un modello accurato dei contributi di rumore dell’unità inerziale. Il
modello, che identifica i diversi contributi al rumore dei sensori inerziali, sarà utilizzato
Page 9 of 10
nella fase di caratterizzazione e calibrazione sperimentale dell’unità inerziale, che sarà
possibilmente svolta in collaborazione con il partner di progetto MerMec.
3.
Progettazione di un in clinometro ottico in tecnologia plasmonica
Un sistema di controllo di stabilità è generalmente costituito da quattro blocchi
fondamentali quali sensori, software e hardware di controllo e attuatori. Le
prestazioni del sistema dipendono dal tipo di sensore impiegato e dalla precisione con
cui le grandezze fisiche di interesse possono essere rilevate. La capacità di rilevare con
precisione variazioni dell’angolo di inclinazione di una carrozza ferroviaria è elemento
fondamentale per il controllo della stabilità di sistemi ad alta velocità. In questo caso
gli inclinometri devono effettuare misure di precisione della posizione in condizioni
dinamiche in modo da agevolare l’intervento di correzione delle manovre che
causano instabilità in maniera immediata. I parametri che gli inclinometri rilevano e/o
controllano, sono la velocità, l’oscillazione laterale, il raggio di sterzata. Gli
inclinometri possono essere realizzati con diverse tecnologie e architetture tra cui
sistemi meccanici a massa inerziali, sistemi microelettromeccanici (MEMS), sistemi in
fibra ottica, ecc. La configurazione di inclinometro, oggetto di questa attività di
ricerca, è fortemente innovativa: si basa sull’utilizzo di nano strutture plasmoniche
depositate su substrato semiconduttore. Il sistema proposto sfrutta la risonanza
plasmonica di nanostrutture metalliche. Come è ben noto, su una interfaccia metallodielettrica si eccitano i plasmoni superficiali (SP), onde superficiali determinate dalle
oscillazioni del plasma di elettroni. I SP sono in grado di propagarsi per una definita
lunghezza (Lsp) sulla suddetta interfaccia e presentano una distribuzione spaziale di
tipo esponenziale decrescente nella direzione trasversale a quella di propagazione
(onda evanescente). La condizione fisica necessaria affinché si possano eccitare i SP
consiste nel considerare materiali aventi parte reale della permettività dielettrica
negativa. I metalli nobili, primi tra tutti oro e argento, mostrano tale proprietà negli
intervalli di lunghezze d’onda del visibile e del vicino infrarosso. I sistemi plasmonici
presentano risonanze a particolari lunghezze d’onda (risonanze plasmoniche) la cui
posizione e forma sono fortemente dipendenti dalle proprietà geometriche della
struttura (materiali impiegati, distanza tra nanoparticelle nel caso di strutture
organizzate in array…), rendendo così possibile l’impiego di tali sistemi per la
rilevazione di grandezze fisiche. La struttura plasmonica che si intende realizzare è
composta da array di aperture in uno strato di oro, poste reciprocamente ad una
determinata distanza (periodo). La variazione dell’angolo d’incidenza della sorgente
induce notevoli variazioni sul comportamento in frequenza del massimo di riflessione.
Il sistema proposto offre la possibilità di stimare con elevata risoluzione l’angolo α di
incidenza della sorgente di eccitazione del sistema plasmonico. Se l’angolo di
incidenza viene variato, ad esempio, da 0° a 10°, la risonanza plasmonica si sposta di
circa 100 nm a destra e a sinistra rispetto alla sua posizione originale. Ne consegue
che è possibile raggiungere risoluzioni estremamente elevate, pari a 0.1°. Supponendo
di separare i sistemi di riferimento della sorgente (relativo e associato al moto della
carrozza) e del sensore plasmonico (assoluto), si può pertanto monitorare in real-time
l’evoluzione dinamica del “sistema treno”. Inoltre la rilevazione della variazione
dell’angolo nell’unità di tempo può essere sfruttata per analizzare nuove
configurazioni per la realizzazione di un giroscopio integrato in grado di determinare
l’accelerazione sperimentata dal treno in corsa.
© Copyright 2026 Paperzz