CONSIGLIO NAZIONALE DELLE RICERCHE
Istituto di Fisica Applicata “Nello Carrara”
Via Madonna del Piano, 10
50019 - Sesto Fiorentino - Italia
Gruppo di Ricerca
SOASAR
Sistemi Ottici Aerospaziali ad Alta Risoluzione
PRISMA
Products and Applications
Titolo:
Documento:
Data:
CNR–IFAC/METEORS/140331
31 marzo 2014
Nome e Cognome:
AUTORI:
Funzione:
Documento riservato
Affiliazione:
Bruno Aiazzi
CNR - IFAC
Luciano Alparone
CNR - IFAC
Alessandro Barducci
CNR - IFAC
Stefano Baronti
CNR - IFAC
Roberto Carlà
CNR - IFAC
Andrea Garzelli
CNR - IFAC
Donatella Guzzi
CNR - IFAC
Cinzia Lastri
CNR - IFAC
Paolo Marcoionni
CNR - IFAC
Vanni Nardino
CNR - IFAC
Ivan Pippi
CNR - IFAC
Leonardo Santurri
CNR - IFAC
Massimo Selva
CNR - IFAC
Verificato da:
Ivan Pippi
Approvato da:
Roberto Pini
Responsabile del
gruppo di ricerca
CNR - IFAC
Direttore f.f.
CNR-IFAC
CNR - IFAC
2
Firma:
INDICE
1 2 EXECUTIVE SUMMARY ............................................................................................... 6 INTRODUZIONE ............................................................................................................. 7 2.1 SCOPO DEL DOCUMENTO ..................................................................................... 7 2.2 DEFINIZIONI, ACRONIMI ED ABBREVIAZIONI ............................................... 8 2.2.1 DEFINIZIONI ......................................................................................................... 8 2.2.2 ACRONIMI ED ABBREVIAZIONI ...................................................................... 8 2.3 DOCUMENTI APPLICABILI E DI RIFERIMENTO ........................................... 12 3 OBIETTIVI DEL PROGETTO ..................................................................................... 13 4 LA MISSIONE PRISMA................................................................................................ 14 4.1 OBIETTIVI................................................................................................................ 14 4.2 SEGMENTO SPAZIALE .......................................................................................... 16 4.2.1 CARATTERISTICHE OPERATIVE.................................................................... 17 4.2.1.1 MODALITA OPERATIVE ............................................................................ 25 4.2.2 PAYLOAD OTTICI .............................................................................................. 26 4.2.2.1 TELESCOPIO .............................................................................................. 27 4.2.2.2 CAMERA PANCROMATICA ....................................................................... 28 4.2.2.3 CAMERA IPERSPETTRALE ....................................................................... 29 4.2.2.4 CALIBRATORE ............................................................................................ 32 4.2.2.5 RIVELATORI ED ELETTRONICA DI PROSSIMITA.................................. 33 4.2.3 PAYLOAD DATA HANDLING AND TRANSMISSION .................................. 33 4.3 SEGMENTO DI TERRA .......................................................................................... 36 4.3.1 IMAGE DATA HANDLING SEGMENT ............................................................ 36 5 SIMULAZIONE DELLE PRESTAZIONI ................................................................... 38 5.1 GENERAZIONE DI IMMAGINI A PARTIRE DA DATI REALI......................... 40 5.1.1 PRE-ELABORAZIONE DEL DATO HYPERION E DEI DATI AUSILIARI ... 40 5.1.1.1 RIPROIEZIONE ........................................................................................... 40 5.1.1.2 ORTONORMALIZZAZIONE DEL DATO HYPERION ............................... 41 5.1.2 ELABORAZIONI PRELIMINARI DEL DATO HYPERION............................. 42 5.1.2.1 CAMPAGNA DI TELERILEVAMENTO TELAER SU SAN ROSSORE ....... 44 5.2 GENERAZIONE DI IMMAGINI SINTETICHE ................................................... 47 5.2.1 PROCEDURA DI SIMULAZIONE ..................................................................... 47 5.2.2 MODELLI E ACCORGIMENTI UTILIZZATI NELLA PROCEDURA DI
SIMULAZIONE .................................................................................................... 60 5.2.2.1 EFFETTI DOVUTI ALL’ATMOSFERA ....................................................... 60 5.2.2.2 GEOMETRIA E MEMORIZZAZIONE DEL DATO UTILIZZATI NELLA
IMPLEMENTAZIONE SOFTWARE ............................................................ 62 5.2.2.3 SIMULAZIONE DELLA RISPOSTA DEL SISTEMA ................................... 64 5.2.2.3.1 INTEGRAZIONE SPETTRALE DEL DATO PANCROMATICO ...............65 5.2.2.3.2 RISPOSTA IN TENSIONE DEL DATO PANCROMATICO .......................65 5.2.2.3.3 RISPOSTA IN TENSIONE DEL DATO IPERSPETTRALE ........................66 5.2.2.3.4 RISPOSTA IN DIGITAL NUMBER DI UNA BANDA GENERICA ...........67 5.2.2.4 SIMULAZIONE DEI CONTRIBUTI DI RUMORE...................................... 67 5.2.2.4.1 GENERAZIONE DI IMMAGINI SIMULATE TENENDO CONTO DEI
VARI CONTRIBUTI DI RUMORE ALEATORIO .......................................69 6 I PRODOTTI ................................................................................................................... 71 6.1 ORGANIZZAZIONE DEI PRODOTTI DI PRISMA.............................................. 71 6.1.1 STRUTTURA DEI FILE....................................................................................... 73 6.1.2 HIERARCHICAL DATA FORMAT VERSIONE 5 ............................................ 74 CORREZIONE ED INTEGRAZIONE DATI ................................................................ 76 6.1.3 GEOLOCALIZZAZIONE E GEOCODIFICA ..................................................... 79 3
6.2 PRODOTTO DI LIVELLO 1 - RADIANZA AL SENSORE ................................... 80 6.2.1 CALIBRAZIONE DELLA CORRENTE DI BUIO ............................................. 80 6.2.2 CALIBRAZIONE DEL SENSORE A MATRICE (FLAT-FIELD) ..................... 80 6.2.3 CONVERSIONE IN UNITÀ DI RADIANZA ..................................................... 82 6.2.3.1 TEST
DELLE
PROCEDURE
CNR-IFAC
DI
CORREZIONE
RADIOMETRICA SU IMMAGINI HYPERION ........................................... 84 6.3 PRODOTTO DI LIVELLO 2c - RIFLETTANZA A TERRA ................................. 86 6.3.1 METODOLOGIA SVILUPPATA DAL CNR-IFAC ........................................... 88 6.3.1.1 METODO DI STIMA DEL CONTRIBUTO DEI PIXEL VICINI ................. 88 6.3.1.2 METODO ITERATIVO DI STIMA DEI PARAMETRI ATMOSFERICI ...... 90 6.3.1.2.1 PROCEDURE DI LETTURA E SCRITTURA DEL FILE DI INGRESSO
DEL MODTRAN 5.2 ......................................................................................95 6.3.1.3 SUPERFICI NON LAMBERTIANE ............................................................. 95 6.3.1.4 TEST
DELLE
PROCEDURE
CNR-IFAC
DI
CORREZIONE
ATMOSFERICA SU IMMAGINI HYPERION ............................................. 96 6.3.1.5 TEST DELLE PROCEDURE CNR-IFAC SU IMMAGINI PRISMA
SIMULATE ................................................................................................... 97 6.3.2 METODO AUTONOMO DI CORREZIONE DI IMMAGINI IPERSPETTRALI
............................................................................................................................. 102 6.4 PRODOTTO “NOISE MODELING” .................................................................... 106 6.4.1 DESCRIZIONE ................................................................................................... 106 6.4.1.1 INTRODUZIONE ....................................................................................... 106 6.4.1.2 ANALISI DELLA SEQUENZA HYPERION DEL 19 DICEMBRE 2002 ... 106 6.4.1.3 ANALISI DELLA SEQUENZA HYPERION DEL 12 GIUGNO 2001 ........ 108 6.4.1.4 CONCLUSIONI.......................................................................................... 112 6.5 PRODOTTO “CARATTERISTICHE SPAZIALI E SPETTRALI” ..................... 113 6.5.1 MESSA A PUNTO METODOLOGIE PER LA STIMA DELLA MTF ............ 113 6.5.1.1 INTRODUZIONE – OGGETTI DI FORMA GEOMETRICA NOTA ......... 113 6.5.1.2 EDGE: REALIZZAZIONE DELL’IMMAGINE SINTETICA ..................... 114 6.5.1.2.1 PROCEDURA DI STIMA DELLA MTF .....................................................116 6.5.1.2.2 POSSIBILI APPROFONDIMENTI ..............................................................122 6.5.1.3 IMPULSO: REALIZZAZIONE DELL’IMMAGINE SINTETICA ............... 122 6.5.1.3.1 PROCEDURA DI STIMA DELLA MTF DASATA SULL’IMPULSO
SPAZIALE ....................................................................................................124 6.5.1.3.2 RISULTATI OTTENUTI ..............................................................................128 6.5.1.3.3 CONCLUSIONI ............................................................................................132 6.5.1.4 STIMA MEDIANTE DATI MULTIRISOLUZIONE ................................... 132 6.6 PRODOTTO “FUSIONE IMMAGINI IPERSPETTRALI”................................ 135 6.6.1 DESCRIZIONE ................................................................................................... 136 6.6.1.1 Fusione di immagini iperspettrali con due pancromatici simulati con banda
spettrale diversa ......................................................................................... 136 6.6.1.2 Hyper-sharpening SWIR-VNIR .................................................................. 138 6.6.1.3 Hyper-sharpening simulato VNIR .............................................................. 144 6.7 PRODOTTO “RIDUZIONE DELLA DIMENSIONALITÀ” ............................... 146 6.7.1 DESCRIZIONE ................................................................................................... 146 6.8 PRODOTTO “VALUTAZIONE DELLE POTENZIALITA’ APPLICATIVE PER I
PROCESSI AMBIENTALI”................................................................................... 148 6.8.1 OBIETTIVI ATTIVITA’ .................................................................................... 148 6.8.2 APPROCCIO METODOLOGICO...................................................................... 148 6.8.3 Criteri di scelta dell’area test, acquisizione e preelaborazione dei dati .............. 149 6.8.4 COERENZA RADIOMETRICA TRA IL DATO HYPERION ed ALI ........... 156 6.8.4.1 Generazione di immagini ALI simulate a banda larga da immagini
Hyperion a banda stretta ........................................................................... 157 4
6.8.4.2 Valutazione statistica delle bande ALI simulate ........................................ 160 6.8.5 CARATTERIZZAZIONE STATISTICA DELLE IMMAGINI HYPERION.... 165 6.8.6 POTENZIALITA’ AGGIUNTIVE DEL DATO IPERSPETTRALE................. 167 6.8.6.1 RISOLUZIONE SPETTRALE VS. RISOLUZIONE SPAZIALE ................. 173 6.8.7 WP 620 ANALISI DI AREE INTERESSATE DA INCENDI ........................... 174 6.8.7.1 APPROCCIO METODOLOGICO ............................................................. 174 6.8.7.2 Caso di studio ............................................................................................. 175 Perimetrazione delle aree interessate da incendio .................................................. 177 6.8.7.2.1 Selezione delle aree campione delle classi suolo nudo, suolo vegetato, suolo
bruciato ..........................................................................................................177 6.8.7.2.2 discriminabilità delle aree incendiate mediante l’informazione multispettrale a
banda larga .....................................................................................................179 6.8.7.2.3 Fire assessment con procedura MESMA .......................................................186 6.8.8 WP 610 – VALUTAZIONE DELLO STATO DI UMIDITA’ SUPERFICIALE
............................................................................................................................. 195 6.8.8.1 PREMESSA ................................................................................................ 195 6.8.8.2 OBIETTIVI ................................................................................................. 196 6.8.8.3 INQUADRAMENTO DELLA PROBLEMATICA - PRINCIPI FISICI....... 196 6.8.8.4 METODI PER LA STIMA DELLA SSM MEDIANTE TELERILEVAMENTO
OTTICO...................................................................................................... 200 6.8.8.5 METODOLOGIA ....................................................................................... 201 6.8.8.6 DATI DISPONIBILI ................................................................................... 202 6.8.8.7 CONVERSIONE IN MISURE DI RIFLETTANZA E VALIDAZIONE
COERENZA ATMOSFERICA MULTITEMPORALE ................................ 205 1.0 - 0.01674 · cos [ 0.01720 · (d - 4.0 )] ........................................................................... 206 6.8.8.8 Correlazione della informazione multispettrale e iperspettrale ................ 210 6.8.8.9 CORRELAZIONE
SPETTRI
DI
RIFLETTANZA
–
MISURE
PLUVIOMETRICHE .................................................................................. 214 6.8.8.10 Correlazione indici di umidità e misure pluviometriche............................ 218 6.8.8.11 CONCLUSIONI.......................................................................................... 220 BIBLIOGRAFIA .......................................................................................................... 221 6.8.8.12 APPENDICE A1......................................................................................... 222 Corrispondenza bande spettrali HYPERION ................................................................ 222 7 CONCLUSIONI ............................................................................................................ 223 5
1 EXECUTIVE SUMMARY
6
2 INTRODUZIONE
2.1 SCOPO DEL DOCUMENTO
Questo volume raccoglie il frutto delle attività svolte per l’Agenzia Spaziale Italiana nel
contratto n. I/018/11/0 “OPTIMA – Metodologie avanzate per l’analisi, l’integrazione e
l’ottimizzazione dei prodotti di livello 1 e 2 della missione PRISMA” nell’ambito del bando
per Studi Scientifici a Supporto della Missione PRISMA.
Integrando i contributi dei partecipanti al progetto OPTIMA, il volume descrive le seguenti
tematiche, che in parte sono state approfondite anche attraverso ripetuti incontri e scambi di
informazioni con vari membri del team industriale della missione PRISMA:
1) La missione PRISMA. Obiettivi e caratteristiche con particolare riguardo ai payload
ottici ed al segmento di terra.
2) La simulazione delle prestazioni, attraverso la simulazione di immagini reali e
sintetiche, la simulazione degli effetti dell’atmosfera e la simulazione della risposta
dello strumento.
3) L’organizzazione dei prodotti di PRISMA.
4) Il prodotto di radianza al sensore.
5) Il prodotto di riflettanza a terra.
6) Il noise modeling.
7) Le caratteristiche spaziali e spettrali.
8) La fusione di immagini.
9) La riduzione di dimensionalità.
10) Le applicazioni dei dati telerilevati ad alta risoluzione spettrale e spaziale a vari
settori descrittivi dell’ambiente ed al monitoraggio di calamità e disastri naturali ed
antropici.
Questo volume è stato preceduto da “PRISMA Products and Applications – Stato dell’arte”
(documento CNR-IFAC/SOASAR/120423), che, sulla base dell’esperienza accumulata da
diversi anni dal CNR-IFAC nel campo della sensoristica aerospaziale e del telerilevamento
ottico iperspettrale, descrive allo stato dell’arte le tematiche sopra indicate.
7
2.2 DEFINIZIONI, ACRONIMI ED ABBREVIAZIONI
2.2.1 DEFINIZIONI
2.2.2 ACRONIMI ED ABBREVIAZIONI
4A/OP
6SV1/6S
ADEOS
AGILE
AFCRL
AFRL
AISI
ALI
ARSIS
ASI
ASAR
ASTER
ATBD
ATCOR
ATREM
ATSR
ATW
AVHRR
AVIRIS
AWL
BAI
BAIM
BSM
BT
CA
CBI
CIBR
CHRIS
CNR
CNRS
COCHISE
COMANCHE
CRM
CS
DEM
Automatized Atmospheric Absorption Atlas
Second Simulation of a Satellite Signal in the Solar Spectrum, Vector
Advanced Earth Observing Satellite
Astro-rivelatore Gamma a Immagini LEggero
Air Force Cambridge Research Laboratories
l’Air Force Research Laboratory
l’Infrared Atmospheric Sounding Interferometer
Advanced Land Imager
Amelioration de la Resolution Spatiale par Injection de Structures
Agenzia spaziale italiana
Advanced Synthetic Aperture Radar
Advanced Spaceborne Thermal Emission and Reflection Radiometer
Algorithm Theoretical Basis Documents
Atmospheric CORrection
Atmosphere REMoval program
Along Track Scanning Radiometers
Á “Trous” Wavelet.
Advanced Very High Resolution Radiometer
Airborne Visible/Infrared Imaging Spectrometer
Abdominal Wall Lifting
Burned Area Index
BAI adattato a MODIS
Burn Scars Maps
Brovey Transforms
context adaptive
Composite Burn Index
Continuum Interpolated Band Ratio
Compact High Resolution Imaging Spectrometer
Consiglio Nazionale delle Ricerche
Centre National de la Recherche Scientifique
COde de Correction atmospherique Hyperspectrale d’Images de
Senseurs Embarques
COde de Modelisation pur l’ANalyse des Cibles Hyperspectrales vues
en Entree instrument
Column Radiation Model
Component Substitution
Digital Elevation Model
8
DISORT
DMC
DUP
DWT
EnMAP
ENVISAT
EO
EOS
ERGAS
ERS
ESA
EWT
EWTc
FASCODE
FASE
FLAASH
FOV
FUTBOLIN
FWHM
GCP
GEISA
GEMI
GIS
GLI
GLP
GOES
GPR
GS
GSD
GSFC
GVMI
HDF
HIS
HITRAN
HYDICE
Hyper-SIMGA
HYPERION
Hypseo
HPF
HRVIR
HS
HSI
HWHM
IFAC
IFOV
IHS
IPSL
IRS
Discrete Ordinates Radiative Transfer Program for a Multi-Layered
Plane-Parallel Medium
Dry Matter Content
Data User Program
Decimated Wavelet Tecnique
Environmental Mapping and Analysis Program
Environmental Satellit
Earth Observed
Earth Observing System
Erreur Relative Globale Adimensionnelle de Synthèse
European Remote Sensing satellite
European Space Agency
Equivalent Water Thickness
canopy Equivalent Water Thickness
Fast Atmospheric Signature Code
FASCODE for the Environment
Fast Line-of-sight Atmospheric Analysis of Spectral Hypercubes
Field of View
FUll Transfer By Optimized LINe-by-line methods
Full Width Half Maximum
Ground Control Point
Gestion et Etude des Informations Spectroscopiques Atmosphériques:
Management and Study of Spectroscopic Information
Global Environment Monitoring Index
Geographical Information System
GLobal Imager
Generalized Laplacian Pyramid
Geostationary Operational Environmental Satellites
Ground Penetrating Radar
Gram-Schmidt
Ground sampling Distance
Goddard Space Flight Center
Global Vegetation Moisture Index
Hierarchical Data Format
Hue-Saturation_intensity
HIgh-resolution TRANsmission molecular absorption database
Hyperspectral Digital Imagery Collection Experiment
Hyperspectral - Sistema Iperspettrale Multisensoriale Galileo Avionica
Hyperspectral Imaging Spectrometer
Hyperspectral Earth Observer
High Pass Filter
Haute Résolution dans le Visible et l'Infra-Rouge
Hyper Spectral
Hyper Spectral Imager
Half Width At Half-Maximum
Istituto di Fisica Applicata “Nello Carrara”
Istantaneous Filed of View
Intensity Hue Saturation
Institut Pierre Simon Laplace
Indian Remote Sensing Satellite
9
ITALSCAR
JHM
KARINE
LAC
LAI
LAS
LEO
LBLRTM
libRadtran
LUT
LWIR
MATISSE
MC
MCC
MCT
MIR
MERIS
MESMA
MIVIS
MODIS
MODTRAN
MORFEO
MRA
MS
MSG HRV
MSU
MTF
MWIR
NASA
NBR
NCSA
NDVI
NDWI
NESR
NIR
NOAA
ONERA
OPERA
ORASIS
PAN
PCA
PDHT
PRISMA
PROSA
Q4
QUAC
RFM
RPC
RTE
Burned Forest Mapping from Space
Joint Hyperspectral Mission
K-distribution Atmospheric Radiation: Infrared Net Exchanges
LEISA Atmospheric Corrector
Leaf Area Index
Large Angle Scattering
Low Earth Orbit
Line-Ny-Line Radiative Transfer Model
library for radiative transfer
Look Up Table
LongWave Infra-Red
Modélisation Avancée de la Terre pour l' Imagerie et la Simulation des
Scènes et de leur Environnement
Monte Carlo
Mission Control Centre
Mercurium Cadmium Telluride
Medium Infra-Red
MEdium Resolution Imagining Spectrometer
Multiple End-members Spectral Mixture Analysis
Multispectral Infrared and Visible Imaging Spectrometer
Moderate Resolution Imaging Spectroradiometer
Moderate Resolution Atmospheric Radiance and Transmittance Model
Landslide Monitoring and Risk with Earth Observation data
Multi-Resolution Analysis
MultiSpettrale
Meteosat Second Generation High Resolution Visible
Microwave Sounding Unit
Modulation Transfer Function
Medium Wave Infra-Red
National Aeronautics and Space Administration
Normalized Burnt Ratio
National Centre for Supercomputing Applications
Normalized Difference Vegetation Index
Normalized Difference Water Index
Noise Equivalent Spectral Radiance
Near Infra-Red
National Oceanic and Atmospheric Adninistration
Office National d’Etudes et Recherches Aerospatiales
Operational Eo-based RAinfall
Optical Real-time Adaptive Signature Identification System
Camera pancromatica
Principal Component Analysis
Payload Data Handling and Transmission
PRecursore IperSpettrale della Missione Applicativa
Prodotti di Osservazione Satellitare per Allerta Meteorologica
4 bands Quality index
QUick Atmospheric Correction
Reference Foeward Model
Rational Polinomial Coefficient
Radiative Transfer Equation
10
RTI
RRTM
RTTOV
SAM
SAR
SAS
SBDART
SCC
SEVIRI
SFIM
SCIATRAN
SHARM
SHDOM
SIASGE
SNR
SPOT
SWIR
SSO
SIGRI
TDR
TIR
TLE
TM
TMA
TOAR
VIRS
VNIR
VPI
Raggruppamento Temporaneo d’Imprese
Rapid Radiative Transfer Model
Radiative Transfer Code
Spectral Angle Mapper
Synthetic Aperture Radar
Small Angle Scattering
Santa Barbara DISORT Atmospheric Radiative Transfer
Satellite Control Centre
Spinning Enhanced Visibile and Infrared Imager
Smoothing Filter-Based Intensity Modulation
Radiative Transfer Model and Retrieval Algorithm
Spherical Harmonics code
Spherical Harmonic Discrete Ordinate Method
Sistema Italo Argentino de Satélites para la Gestion de Emergencias
Signal to Noise Ratio
Satellite Pour l'Observation de la Terre
Short Wave Infra-Red
Spatial Standard Observer
Sistema Integrato per Gestione Rischi Incendi
Time-Domain riflectometry
Thermal Infra-Red
Thermal Local Equilibrium
Thematic Mapper
Three-Mirror-Anastigmat
Top Of Atmosphere Radiance
Visible and Infrared Scanner
Visible Near Infra-Red
Verbraucherpreisindex
Tab. 2-1: Lista degli acronimi e abbreviazioni.
11
2.3 DOCUMENTI APPLICABILI E DI RIFERIMENTO
1. Contratto n. I/018/11/0 tra ASI e CNR – IFAC “OPTIMA: metodeologie avanzate per
l’analisi l’integrazione e l’ottimizzazione dei prodotti di livello 1 e 2 della missione
PRISMA” Aprile 2011.
2. Proposta Scientifica “OPTIMA: metodeologie avanzate per l’analisi l’integrazione e
l’ottimizzazione dei prodotti di livello 1 e 2 della missione PRISMA” CNR-IFAC, 23
settembre 2009.
3. Estratto del Mission Requirements Document per le attività industriali di Fase B2/C/D/E1
di PRISMA. Documento ASI DC-OST-2011-032 del 11/04/2011.
4. Documento “PRISMA Products and applications- Stato dell’Arte” del progetto OPTIMA,
aprile 2012
5. PRISMA Payload Design Description Document (Part Number T00854280000)
Documento Selex Galileo PRS-DD-GAF-002 del 20/02/2012.
12
3 OBIETTIVI DEL PROGETTO
Il progetto OPTIMA si propone di accrescere e consolidare le potenzialità applicative della
missione PRISMA attraverso l’implementazione di metodologie avanzate per l’analisi,
l’integrazione e l’ottimizzazione dei prodotti di livello 1 e 2. Questa attività, oltre alla stima
dei prodotti, darà luogo anche allo sviluppo di vari algoritmi di elaborazione e preelaborazione dei dati che verranno acquisiti dallo spettrometro ad immagine e dalla camera
pancromatica di PRISMA.
Da un punto di vista metodologico, il progetto si pone l’obiettivo di sfruttare la particolare
integrazione ottica dei sensori PRISMA, dove la camera pancromatica ed il sensore
iperspettrale condividono lo stesso sistema ottico d’ingresso. Questa circostanza potrà avere
ricadute importanti per le attività e gli algoritmi di image enhancement, image restoration e
data fusion, e potrebbe dar luogo a miglioramenti importanti nei prodotti del telerilevamento
di ordine 2 e superiori.
Per testare le applicazioni sviluppate per il progetto PRISMA è necessaria la generazioni di
dati sintetici e immagini simulate che siano verosimili e affini alle osservazioni della missione
PRISMA. Nella prima parte del progetto si ricorrerà quindi alla simulazione di dati e/o
immagini attraverso la messa a punto di apposite procedure che, tenendo conto sia delle
caratteristiche operative della missione che di quelle tecniche dei suoi sensori ottici,
permettano di ricreare le modalità di acquisizione partendo da scenari realistici.
Un altro obiettivo del progetto riguarda le caratteristiche generali di autonomia e rapidità
d’esecuzione delle procedure di calcolo che saranno considerate e/o implementate. Gli
algoritmi sviluppati si baseranno, tutte le volte che ciò sarà possibile, sull’impiego di tecniche
automatiche di calcolo e di stima. In altre parole, si darà la preferenza alle metodologie
autonome di elaborazione dei dati e delle immagini acquisiti, da eseguirsi senza la continua
interazione con un operatore, così da snellire e standardizzare le operazioni del segmento di
terra. Tra tutti gli algoritmi autonomi saranno preferiti quelli che richiederanno per la loro
esecuzione la minore potenza di calcolo.
Infine le attività del progetto, in particolare per le fasi di simulazione dei dati PRISMA e di
validazione dei prodotti ottenuti con i vari algoritmi, trarranno vantaggio dall’utilizzazione di
due aree di studio, calibrazione e validazione del CNR-IFAC, una da tempo operativa
all’interno del Parco Naturale di San Rossore (Pisa) e l’altra in allestimento a Sesto Fiorentino
(Firenze).
13
4 LA MISSIONE PRISMA
4.1 OBIETTIVI
PRISMA (PRecursore IperSpettrale della Missione Applicativa) è un sistema di
Osservazione della Terra con strumentazione elettro-ottica di tipo innovativo, che integra un
sensore iperspettrale con una camera pancromatica a media risoluzione. I vantaggi di tale
combinazione consistono nell’aggiungere alla classica capacità di osservazione basata sul
riconoscimento delle caratteristiche geometriche della scena, quella offerta dalla sensoristica
iperspettrale, che permette di determinare la composizione chimico-fisica degli oggetti
presenti nella scena. Questo offre alla comunità scientifica e agli utenti numerose applicazioni
nei campi del monitoraggio ambientale, della gestione delle risorse, della classificazione delle
colture, del controllo dell’inquinamento, etc. Ulteriori applicazioni sono possibili anche nel
campo della Sicurezza Nazionale.
PRISMA capitalizza precedenti investimenti ASI nel campo delle "piccole missioni" (ad
es., AGILE), dei carichi utili iperspettrali (ad es., Hypseo, JHM), delle piattaforme satellitari
(MITA / PRIMA) e dei centri di ricezione ed elaborazione dati telerilevati (COSMO-SkyMed
e CNM), che hanno consentito all'industria nazionale, in tali ambiti, di acquisire competenze e
sviluppare/consolidare prodotti di assoluto rilievo.
PRISMA costituisce una “piccola” missione nazionale con natura dimostrativa/tecnologica
e pre-operativa i cui obiettivi fondamentali sono:
• realizzare una piccola missione interamente nazionale per il monitoraggio delle risorse
naturali e delle caratteristiche dell’atmosfera, capitalizzando gli sviluppi pregressi
effettuati dall’ASI
• rendere disponibili nel breve periodo i dati necessari alla comunità scientifica per
sviluppare nuove applicazioni per l’osservazione del territorio e il supporto alla
gestione del rischio ambientale e, basate su immagini ad alta risoluzione spettrale
• qualificare in orbita il carico utile iperspettrale – per primi o tra i primi a livello
europeo.
Le applicazioni ad oggi identificate come prioritarie per l’ASI sono:
• Monitoraggio ambientale
• Inventario e monitoraggio delle foreste
• Mappatura geologica
• Diagnostica ed indicatori agricoli, mappe di land cover e inventario delle coltivazioni
• Definizione della produttività degli ecosistemi acquatici costieri e delle acque interne
• Monitoraggio del ciclo del carbonio
• Mappatura delle aree urbane e funzionali
• Sicurezza
• Caratterizzazione atmosferica
• Supporto alla gestione del rischio (incendi, frane, vulcani e terremoti).
Lo spettrometro ad immagine ed una camera pancromatica della missione PRISMA
potranno osservare tutta la Terra con particolare riguardo all’area, rappresentata in Fig. 4.1, di
coordinate: longitudine tra 100W e 500E, latitudine tra 300N e 700N.
14
Fig. 4.1: Area di interesse.
Il “procurement” del servizio di lancio è a carico dell’ASI; la baseline di lancio è costituita
da VEGA, ma il satellite deve essere compatibile con i lanciatori della classe “piccola”
(Rockot, Dnepr, etc.).
Lo svolgimento delle attività di missione è stato affidato dall’ASI ad un Raggruppamento
Temporaneo d’Imprese (RTI), costituito da OHB - Compagnia Generale per lo Spazio S.p.A.
(ex Carlo Gavazzi Space S.p.A.) in qualità di mandataria e da Selex - Galileo S.p.A. e
Rheinmetall Italia S.p.A. (attualmente Telematic Solutions) in qualità di mandanti. Tale
raggruppamento gestisce a sua volta un team che vede la partecipazione alle attività di
ulteriori ed importanti realtà industriali nazionali operanti nel settore. Il contratto assegna al
Contraente la responsabilità “end-to-end” per lo sviluppo e la realizzazione del sistema fino al
commissioning in orbita (Fase B2/C/D/E1)
15
4.2 SEGMENTO SPAZIALE
Il Segmento Spaziale (Fig. 4.2) è costituito dai seguenti elementi:
• La piattaforma
• Il payload iperspettrale e pancromatico
• Il Payload Data Handling and Transmission (PDHT)
Fig. 4.2: Il satellite PRISMA
Fig. 4.3 : Diagramma a blocchi del segmento spaziale.
16
4.2.1 CARATTERISTICHE OPERATIVE
Le caratteristiche operative del satellite PRISMA sono riportate in Tab. 4.1, mentre la Tab.
4.2 mostra un TLE (Two-Line Element) che rispetta i parametri orbitali richiesti.
CARATTERISTICHE DEL SATELLITE:
Data di lancio prevista:
Vita operativa:
Tipo di orbita:
Quota nominale, massima e minima:
Semi-asse maggiore dell’orbita:
Eccentricità:
Inclinazione:
Periodo:
Fattore di ripetizione:
Attraversamento dell'equatore:
Periodo di ripetizione:
Periodo di rivisitazione:
Angolo di rollio massimo utile:
Angolo di beccheggio:
Stabilità di puntamento:
Accuratezza di puntamento:
Geolocazione:
Sensori imbarcati:
Separazione tra le camere:
PRISMA
2016
3 anni (più 2 anni)
LEO SSF (circolare, polare, sincrona
solare frozen)
620 km, 628 km, 612 km
6992,935 km
0,0011403
97,851o
5819,7 sec
14,83 pari a 14,85 rev/giorno
10:30 ora locale, discendente
29 giorni
< 7 giorni
± 18,20
± 30
Drift (Low frequency) : 9.68 μrad / 99.8%
del tempo di integrazione sul piano
focale.
Jitter : random con distribuzione normale,
(media = 0, σ = 1,44 μrad sul tempo di
integrazione, max angular error rate <
6.96 mrad/s).
< 1 km a terra nelle due direzioni
< 200 m a terra nelle due direzioni
Camera pancromatica
Camera iperspettrale
0,36o (3,90 km al suolo @ 620 km)
Tab. 4-1: Caratteristiche del satellite PRISMA.
0 PRISMA
1 12345U 16010B
16244.45830000 .00000000 00000-0 00000-0 0 0002
2 12345 097.8510 317.5000 0011300 090.0000 185.6565 14.85000000 34737
Tab. 4-2: Esempio di TLE tipico per il satellite PRISMA utilizzato per le simulzioni di Fig. 4.4.
Column
01
03-07
08
10-11
12-14
15-17
Line 1
Description
Line Number of Element Data
Satellite Number
Classification (U=Unclassified)
International Designator (Last two digits of launch year)
International Designator (Launch number of the year)
International Designator (Piece of the launch)
17
19-20
21-32
34-43
45-52
54-61
63
65-68
69
Column
01
03-07
09-16
18-25
27-33
35-42
44-51
53-63
64-68
69
Epoch Year (Last two digits of year)
Epoch (Day of the year and fractional portion of the day)
First Time Derivative of the Mean Motion
Second Time Derivative of Mean Motion (decimal point assumed)
BSTAR drag term (decimal point assumed)
Ephemeris type
Element number
Checksum (Modulo 10)
(Letters, blanks, periods, plus signs = 0; minus signs = 1)
Line 2
Description
Line Number of Element Data
Satellite Number
Inclination [Degrees]
Right Ascension of the Ascending Node [Degrees]
Eccentricity (decimal point assumed)
Argument of Perigee [Degrees]
Mean Anomaly [Degrees]
Mean Motion [Revs per day]
Revolution number at epoch [Revs]
Checksum (Modulo 10)
Tab. 4-3: Descrizione del significato dei parametri che costituiscono il Two-Line Element.
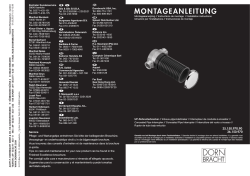
Fig. 4.3: Visualizzazione fisica dei parametri contenuti nei TLE.
dove:
a: Semi asse maggiore dell’orbita
E0: Eccentricità: 0 = circolare, minore di 1 = ellittica
I0: Inclinazione (gradi). È l’angolo compreso tra l’equatore e il piano dell’orbita
O0: Ascensione Retta del Nodo Ascendente (gradi). È l’angolo tra l’equinozio vernale e il
punto in cui l’orbita attraversa il piano equatoriale salendo verso nord.
W0: Argomento del Perigeo (gradi). È l’angolo compreso tra il nodo ascendente ed il punto
dell’orbita più vicino alla Terra (perigeo).
18
M0: Anomalia vera (gradi). È l’angolo fra il perigeo ed il satellite nel piano orbitale.
Apogeo: E’ il punto più distante dalla Terra.
Perigeo: E’ il punto più vicino dalla Terra.
Ra: Distanza dal centro della Terra al punto di apogeo.
Linea dei Nodi:I punti dove il satellite attraversa l’equatore.
Fig. 4.4: Simulazione effettuata utilizzando un TLE tipico per l’epoch 2016-09-24 10:30:00.
*
PROGRAM SATELTRACK
*
C.N.R. - I.F.A.C.
*
* ----------------------------------------------- *
* 0 PRISMA
Satellite tracking prediction *
-
INTERESTED AREA RADIUS (KM):
NORTH LATITUDE AREA CENTER:
EAST LONGITUDE AREA CENTER:
STATION NAME:
INITIAL REVOLUTION:
FINAL REVOLUTION:
SAMPLING INTERVAL (MIN):
200.0
43.73
10.30
SAN ROSSORE
3475.0
4475.0
0.1000
-
SATELLITE NUMBER:
EPOCH YEAR:
EPOCH DAY:
FIRST TIME DERIV. OF MEAN MOTION (REV/DAY**2):
SECOND TIME DERIV. OF MEAN MOTION (REV/DAY***3):
INCLINATION (DEGREES):
RIGHT ASCENSION OF THE ASCENDING NODE (DEGREES):
ECCENTRICITY:
ARGUMENT OF PERIGEE (DEGREES):
MEAN ANOMALY (DEGREES):
MEAN MOTION (REVS PER DAY):
REVOLUTION NUMBER AT EPOCH (REVS):
XTAU:
TETZZ:
19
12345
2016
244.4583000000000
0.000000000000000
0.000000000000000
97.85099999999999
317.5000000000000
1.1299999999E-003
90.00000000000000
185.6564999999999
14.85000000000000
3473
1.000000000000000
99.85230255126953
SEM. MAGG. APPROSS. ALL'EPOCA (E.R.)=
CORREZ. DEL SEMIASSE MAGG. APPROSS.=
SEMIASSE MAGGIORE ALL'EPOCA (E.R.)=
SEMIASSE MAGG. MEDIO ALL'EPOCA (KM)=
PRIMO TERM. DELL'ASC. N.A. (DEG./DAY)=
PRIMO TERM. ARG. PERIG.(DEG./DAY)=
PRIMO TERM. DERIV. DELL'ECCENTRICITA'=
PRIMO TERM. DER. SEM. MAGG.(E.R./DAY)=
SEC. TERM. DER. SEM. MAG.(E.R./DAY**2)=
SEC. TERM. DER. ASC. RETTA N.A.=
SEC. TERM. DERIV. ARGOM. PERIGEO=
SEC. TERM. DERIV. DELL'ECCENTRICITA'=
PERIODO ANOMALISTICO ALL'EPOC.(MIN.)=
LATIT. GEOCENTRICA DEL PERIGEO(DEG.)=
ALTITUDINE APPROSS. DELL'APOGEO (KM)=
ALTITUDINE APPROSS. DEL PERIGEO (KM)=
0.1096201E+01
0.6374423E-03
0.1096434E+01
0.6993207E+04
0.9857698E+00
-0.3271668E+01
-0.0000000E+00
-0.0000000E+00
0.0000000E+00
0.0000000E+00
-0.0000000E+00
0.0000000E+00
0.9696970E+02
0.8214899E+02
0.6439609E+03
0.6281563E+03
YEAR: 16 DAY: 244 SAT.
312 REV. 3479
GMT
LONG
LAT
ALTITUDE SAT LST
21 16.300
10.524 42.065
619.155 21 58.4
21 16.400
10.407 42.431
619.254 21 58.0
21 16.500
10.289 42.796
619.353 21 57.7
21 16.600
10.170 43.162
619.453 21 57.3
21 16.700
10.050 43.527
619.553 21 56.9
21 16.800
9.928 43.892
619.653 21 56.5
21 16.900
9.805 44.257
619.753 21 56.1
21 17.000
9.682 44.622
619.854 21 55.7
21 17.100
9.556 44.987
619.955 21 55.3
21 17.200
9.430 45.351
620.056 21 54.9
SUBDIST
185.919
144.653
103.778
64.035
30.255
34.833
70.662
110.697
151.637
192.905
AZIM
174.282
176.508
180.483
189.471
221.816
301.242
326.146
333.772
337.327
339.373
ELEV
71.701
75.595
79.573
83.527
86.933
86.469
82.862
78.889
74.920
71.045
SL.DIST
649.649
637.991
629.163
623.284
620.438
620.666
623.963
630.280
639.527
651.577
YEAR: 16 DAY: 250 SAT.
312 REV. 3561
GMT
LONG
LAT
ALTITUDE SAT LST
10 17.400
10.327 45.386
622.366 10 58.7
10 17.500
10.200 45.022
622.276 10 58.3
10 17.600
10.075 44.657
622.186 10 57.9
10 17.700
9.951 44.293
622.096 10 57.5
10 17.800
9.828 43.928
622.007 10 57.1
10 17.900
9.707 43.563
621.917 10 56.7
10 18.000
9.586 43.198
621.828 10 56.3
10 18.100
9.467 42.833
621.739 10 56.0
10 18.200
9.349 42.468
621.650 10 55.6
SUBDIST
184.088
143.798
104.617
68.484
43.759
51.188
82.507
120.322
160.099
AZIM
0.648
356.874
350.210
336.086
300.361
248.970
224.494
214.350
209.150
ELEV
71.918
75.718
79.522
83.103
85.583
84.836
81.709
77.991
74.175
SL.DIST
650.975
639.785
631.426
626.012
623.620
624.287
628.004
634.717
644.333
YEAR: 16 DAY: 250 SAT.
312 REV. 3568
GMT
LONG
LAT
ALTITUDE SAT LST
21 12.000
11.488 42.510
617.696 21 58.0
21 12.100
11.370 42.876
617.810 21 57.6
21 12.200
11.250 43.241
617.924 21 57.2
21 12.300
11.129 43.607
618.038 21 56.8
21 12.400
11.008 43.972
618.153 21 56.4
21 12.500
10.885 44.337
618.268 21 56.0
21 12.600
10.760 44.702
618.383 21 55.6
21 12.700
10.635 45.067
618.498 21 55.2
21 12.800
10.508 45.432
618.614 21 54.8
SUBDIST
166.322
128.430
93.905
68.071
62.766
82.064
114.093
150.953
189.846
AZIM
144.181
137.287
125.003
101.323
64.384
34.491
18.588
10.030
4.906
ELEV
73.497
77.132
80.526
83.107
83.640
81.705
78.531
74.954
71.289
SL.DIST
642.226
632.595
625.882
622.183
621.549
623.990
629.468
637.905
649.183
20
YEAR: 16 DAY: 256 SAT.
312 REV. 3650
GMT
LONG
LAT
ALTITUDE SAT LST
10 13.000
11.412 45.330
624.934 10 58.6
10 13.100
11.285 44.966
624.849 10 58.2
10 13.200
11.160 44.602
624.764 10 57.8
10 13.300
11.037 44.237
624.679 10 57.4
10 13.400
10.914 43.873
624.594 10 57.1
10 13.500
10.793 43.508
624.510 10 56.7
10 13.600
10.673 43.143
624.425 10 56.3
10 13.700
10.554 42.779
624.340 10 55.9
10 13.800
10.436 42.414
624.256 10 55.5
10 13.900
10.319 42.049
624.171 10 55.2
SUBDIST
198.419
158.097
118.689
81.537
51.764
46.710
71.809
107.725
146.722
186.884
AZIM
25.962
29.350
35.009
46.016
71.952
121.706
155.100
168.919
175.643
179.520
ELEV
70.667
74.412
78.189
81.834
84.798
85.304
82.800
79.261
75.500
71.738
SL.DIST
658.049
645.993
636.705
630.308
626.892
626.507
629.159
634.811
643.384
654.765
YEAR: 16 DAY: 256 SAT.
312 REV. 3657
GMT
LONG
LAT
ALTITUDE SAT LST
21 7.700
12.448 42.962
617.100 21 57.5
21 7.800
12.328 43.328
617.231 21 57.1
21 7.900
12.207 43.693
617.362 21 56.7
21 8.000
12.085 44.058
617.494 21 56.3
21 8.100
11.962 44.423
617.626 21 55.9
21 8.200
11.837 44.788
617.758 21 55.5
21 8.300
11.712 45.153
617.891 21 55.1
SUBDIST
AZIM
193.464 115.439
169.452 104.606
153.286 90.881
147.561 75.070
153.448 59.279
169.739 45.598
193.825 34.810
ELEV
70.941
73.182
74.718
75.267
74.702
73.154
70.906
SL.DIST
649.783
642.382
637.908
636.422
637.943
642.450
649.880
YEAR: 16 DAY: 257 SAT.
312 REV. 3672
GMT
LONG
LAT
ALTITUDE SAT LST
21 23.000
8.749 42.472
616.886 21 58.0
21 23.100
8.630 42.837
617.020 21 57.6
21 23.200
8.511 43.203
617.153 21 57.2
21 23.300
8.390 43.568
617.287 21 56.9
21 23.400
8.269 43.933
617.422 21 56.5
21 23.500
8.146 44.299
617.556 21 56.1
SUBDIST
188.181
167.614
155.755
154.616
164.417
183.407
AZIM
222.521
234.274
248.516
263.979
278.608
290.904
ELEV
71.429
73.356
74.482
74.591
73.658
71.872
SL.DIST
648.048
641.824
638.537
638.232
640.912
646.538
YEAR: 16 DAY: 262 SAT.
312 REV. 3739
GMT
LONG
LAT
ALTITUDE SAT LST
10 8.800
12.250 44.560
627.441 10 57.8
10 8.900
12.127 44.196
627.355 10 57.4
10 9.000
12.004 43.832
627.269 10 57.0
10 9.100
11.883 43.468
627.183 10 56.6
10 9.200
11.763 43.103
627.096 10 56.3
10 9.300
11.644 42.739
627.010 10 55.9
10 9.400
11.527 42.374
626.924 10 55.5
SUBDIST
180.828
155.030
137.221
130.713
137.129
154.875
180.646
AZIM
58.638
69.841
84.670
102.339
120.022
134.882
146.113
ELEV
72.352
74.762
76.454
77.078
76.465
74.781
72.377
SL.DIST
655.143
647.887
643.508
642.066
643.582
648.036
655.370
YEAR: 16 DAY: 263 SAT.
312 REV. 3754
GMT
LONG
LAT
ALTITUDE SAT LST
10 24.200
8.437 44.694
627.913 10 57.9
10 24.300
8.313 44.330
627.826 10 57.6
10 24.400
8.190 43.966
627.739 10 57.2
10 24.500
8.068 43.602
627.652 10 56.8
10 24.600
7.948 43.237
627.565 10 56.4
SUBDIST
183.054
172.226
171.140
179.976
197.409
AZIM
306.465
293.464
279.538
266.221
254.704
ELEV
72.157
73.161
73.263
72.445
70.849
SL.DIST
656.227
653.046
652.779
655.430
660.965
YEAR: 16 DAY: 263 SAT.
312 REV. 3761
GMT
LONG
LAT
ALTITUDE SAT LST
21 18.500
9.945 42.193
617.078 21 58.3
21 18.600
9.827 42.559
617.228 21 57.9
21 18.700
9.709 42.925
617.378 21 57.5
21 18.800
9.589 43.290
617.529 21 57.2
21 18.900
9.468 43.655
617.681 21 56.8
21 19.000
9.346 44.021
617.832 21 56.4
SUBDIST
173.227
135.680
101.483
75.335
67.361
82.967
AZIM
189.725
196.577
208.312
229.780
263.224
293.251
ELEV
72.834
76.419
79.769
82.374
83.174
81.611
SL.DIST
643.742
633.799
626.756
622.712
621.724
623.806
21
21 19.100
21 19.200
21 19.300
9.223
9.099
8.973
44.386
44.751
45.116
112.749 310.652
148.400 320.284
186.582 326.094
78.658
75.194
71.587
628.926
637.010
647.946
YEAR: 16 DAY: 269 SAT.
312 REV. 3843
GMT
LONG
LAT
ALTITUDE SAT LST
10 19.600
9.782 45.397
630.500 10 58.7
10 19.700
9.656 45.033
630.406 10 58.3
10 19.800
9.531 44.669
630.311 10 57.9
10 19.900
9.407 44.306
630.216 10 57.5
10 20.000
9.284 43.942
630.121 10 57.1
10 20.100
9.163 43.578
630.026 10 56.8
10 20.200
9.043 43.214
629.931 10 56.4
10 20.300
8.924 42.849
629.835 10 56.0
10 20.400
8.806 42.485
629.740 10 55.6
SUBDIST
189.703
153.592
121.066
95.853
84.761
92.993
116.529
148.254
183.983
AZIM
347.692
340.759
329.846
312.174
286.467
259.905
240.926
229.160
221.744
ELEV
71.604
74.955
78.052
80.496
81.582
80.777
78.492
75.464
72.137
SL.DIST
660.526
650.172
642.618
637.965
636.277
637.580
641.854
649.044
659.053
YEAR: 16 DAY: 269 SAT.
312 REV. 3850
GMT
LONG
LAT
ALTITUDE SAT LST
21 14.100
11.024 42.277
618.288 21 58.2
21 14.200
10.907 42.642
618.453 21 57.8
21 14.300
10.788 43.008
618.620 21 57.5
21 14.400
10.668 43.373
618.786 21 57.1
21 14.500
10.547 43.738
618.953 21 56.7
21 14.600
10.425 44.103
619.121 21 56.3
21 14.700
10.301 44.468
619.288 21 55.9
21 14.800
10.177 44.833
619.456 21 55.5
21 14.900
10.051 45.198
619.624 21 55.1
SUBDIST
171.921
130.508
89.431
49.522
19.856
42.687
82.065
123.006
164.342
AZIM
159.723
157.660
153.677
143.101
87.250
13.491
0.076
355.470
353.180
ELEV
72.985
76.944
80.982
84.981
87.984
85.672
81.716
77.676
73.704
SL.DIST
644.494
633.776
625.938
621.089
619.300
620.594
624.953
632.311
642.565
YEAR: 16 DAY: 275 SAT.
312 REV. 3932
GMT
LONG
LAT
ALTITUDE SAT LST
10 15.200
10.879 45.383
632.378 10 58.7
10 15.300
10.753 45.020
632.271 10 58.3
10 15.400
10.628 44.657
632.164 10 57.9
10 15.500
10.504 44.293
632.056 10 57.5
10 15.600
10.382 43.929
631.949 10 57.1
10 15.700
10.260 43.566
631.841 10 56.7
10 15.800
10.140 43.202
631.733 10 56.4
10 15.900
10.021 42.838
631.624 10 56.0
10 16.000
9.903 42.473
631.516 10 55.6
10 16.100
9.786 42.109
631.407 10 55.2
SUBDIST
189.392
147.822
106.247
64.671
23.105
18.553
60.122
101.718
143.320
184.929
AZIM
13.807
13.924
14.120
14.546
16.443
189.894
192.430
192.906
193.116
193.239
ELEV
71.679
75.536
79.512
83.577
87.698
88.151
84.027
79.953
75.966
72.095
SL.DIST
662.231
650.521
641.563
635.474
632.338
632.201
635.065
640.891
649.600
661.077
YEAR: 16 DAY: 275 SAT.
312 REV. 3939
GMT
LONG
LAT
ALTITUDE SAT LST
21 9.800
11.988 42.717
620.422 21 57.8
21 9.900
11.869 43.082
620.600 21 57.4
21 10.000
11.749 43.447
620.779 21 57.0
21 10.100
11.628 43.812
620.958 21 56.6
21 10.200
11.506 44.177
621.137 21 56.2
21 10.300
11.382 44.542
621.316 21 55.8
21 10.400
11.257 44.906
621.495 21 55.4
21 10.500
11.131 45.271
621.675 21 55.0
SUBDIST
AZIM
177.139 128.891
145.759 119.068
120.838 104.579
106.983 84.646
108.513 62.336
124.858 43.359
151.286 29.877
183.486 20.755
ELEV
72.543
75.512
77.920
79.276
79.126
77.531
74.987
71.958
SL.DIST
647.939
639.343
633.657
630.961
631.290
634.640
640.961
650.167
YEAR: 16 DAY: 276 SAT.
312 REV. 3954
GMT
LONG
LAT
ALTITUDE SAT LST
21 25.400
7.933 43.319
621.103 21 57.1
21 25.500
7.812 43.684
621.283 21 56.7
SUBDIST
AZIM
196.136 257.350
199.934 269.395
ELEV
70.796
70.450
SL.DIST
654.352
655.655
YEAR: 16 DAY: 281 SAT.
617.985 21 56.0
618.137 21 55.6
618.290 21 55.2
312 REV. 4021
22
GMT
10 10.900
10 11.000
10 11.100
10 11.200
10 11.300
10 11.400
10 11.500
10 11.600
10 11.700
LONG
11.852
11.727
11.604
11.481
11.360
11.240
11.121
11.003
10.886
LAT
45.015
44.652
44.289
43.925
43.561
43.198
42.834
42.470
42.105
ALTITUDE
633.377
633.254
633.130
633.007
632.883
632.758
632.634
632.509
632.385
SAT LST
10 58.3
10 57.9
10 57.5
10 57.1
10 56.7
10 56.4
10 56.0
10 55.6
10 55.2
SUBDIST
188.715
153.099
121.304
97.165
87.290
96.184
119.740
151.262
186.761
AZIM
40.258
47.485
58.763
76.699
102.033
127.647
146.025
157.598
164.996
ELEV
71.769
75.063
78.079
80.408
81.370
80.504
78.230
75.238
71.951
SL.DIST
663.108
652.950
645.575
641.081
639.529
640.941
645.298
652.544
662.582
YEAR: 16 DAY: 281 SAT.
312 REV. 4028
GMT
LONG
LAT
ALTITUDE SAT LST
21 5.700
12.713 43.873
623.461 21 56.6
21 5.800
12.590 44.238
623.647 21 56.2
21 5.900
12.466 44.603
623.833 21 55.8
SUBDIST
194.177
191.637
198.061
AZIM
84.455
72.070
59.934
ELEV
71.032
71.266
70.679
SL.DIST
655.766
654.994
657.137
YEAR: 16 DAY: 282 SAT.
312 REV. 4043
GMT
LONG
LAT
ALTITUDE SAT LST
21 20.700
9.374 42.284
623.096 21 58.2
21 20.800
9.257 42.649
623.282 21 57.8
21 20.900
9.138 43.014
623.468 21 57.5
21 21.000
9.018 43.378
623.654 21 57.1
21 21.100
8.897 43.743
623.840 21 56.7
21 21.200
8.775 44.108
624.027 21 56.3
21 21.300
8.652 44.472
624.213 21 55.9
21 21.400
8.527 44.837
624.400 21 55.5
SUBDIST
177.495
146.941
123.096
110.390
112.649
129.085
155.254
187.113
AZIM
205.398
215.483
230.098
249.713
271.228
289.507
302.665
311.705
ELEV
72.578
75.457
77.750
78.987
78.767
77.173
74.672
71.695
SL.DIST
650.772
642.407
636.931
634.419
634.904
638.380
644.796
654.065
YEAR: 16 DAY: 287 SAT.
312 REV. 4110
GMT
LONG
LAT
ALTITUDE SAT LST
10 6.800
12.582 43.924
633.171 10 57.1
10 6.900
12.461 43.560
633.029 10 56.7
10 7.000
12.340 43.197
632.888 10 56.4
10 7.100
12.221 42.833
632.746 10 56.0
SUBDIST
AZIM
184.219 82.484
174.777 95.442
174.945 109.100
184.698 122.015
ELEV
72.185
73.052
73.036
72.141
SL.DIST
661.908
659.081
659.123
662.035
YEAR: 16 DAY: 288 SAT.
312 REV. 4125
GMT
LONG
LAT
ALTITUDE SAT LST
10 21.900
9.141 45.153
633.593 10 58.5
10 22.000
9.016 44.790
633.450 10 58.1
10 22.100
8.892 44.426
633.306 10 57.7
10 22.200
8.769 44.063
633.162 10 57.3
10 22.300
8.647 43.699
633.018 10 56.9
10 22.400
8.527 43.335
632.874 10 56.5
10 22.500
8.407 42.972
632.729 10 56.1
SUBDIST
182.943
155.947
136.495
128.076
132.810
149.457
174.646
AZIM
330.234
319.498
305.033
287.321
269.097
253.552
241.796
ELEV
72.300
74.799
76.632
77.433
76.982
75.408
73.062
SL.DIST
661.486
653.831
649.023
647.126
648.165
652.128
658.964
YEAR: 16 DAY: 288 SAT.
312 REV. 4132
GMT
LONG
LAT
ALTITUDE SAT LST
21 16.200
10.580 41.964
625.625 21 58.5
21 16.300
10.463 42.329
625.811 21 58.2
21 16.400
10.346 42.694
625.997 21 57.8
21 16.500
10.227 43.059
626.183 21 57.4
21 16.600
10.107 43.423
626.370 21 57.0
21 16.700
9.986 43.788
626.556 21 56.6
21 16.800
9.864 44.152
626.742 21 56.3
21 16.900
9.741 44.516
626.929 21 55.9
21 17.000
9.616 44.880
627.115 21 55.5
21 17.100
9.490 45.244
627.301 21 55.1
SUBDIST
197.560
156.247
115.198
74.841
37.460
25.988
58.448
98.103
138.918
180.101
AZIM
173.271
175.068
178.138
184.538
204.544
284.385
323.507
333.142
337.190
339.401
ELEV
70.798
74.630
78.560
82.519
86.242
87.391
84.147
80.230
76.281
72.410
SL.DIST
659.613
647.381
637.911
631.325
627.713
627.126
629.572
635.015
643.376
654.544
23
YEAR: 16 DAY: 294 SAT.
312 REV. 4214
GMT
LONG
LAT
ALTITUDE SAT LST
10 17.400
10.368 45.513
632.909 10 58.9
10 17.500
10.241 45.150
632.750 10 58.5
10 17.600
10.116 44.787
632.590 10 58.1
10 17.700
9.992 44.423
632.430 10 57.7
10 17.800
9.869 44.060
632.270 10 57.3
10 17.900
9.747 43.696
632.109 10 56.9
10 18.000
9.627 43.332
631.948 10 56.5
10 18.100
9.507 42.968
631.787 10 56.1
10 18.200
9.389 42.604
631.626 10 55.8
10 18.300
9.272 42.240
631.464 10 55.4
SUBDIST
198.277
157.904
118.362
80.888
50.348
44.577
70.006
106.194
145.320
185.536
AZIM
1.526
358.326
352.949
342.390
316.844
265.316
231.050
217.388
210.862
207.138
ELEV
70.885
74.598
78.349
81.987
84.995
85.566
83.054
79.521
75.778
72.039
SL.DIST
665.545
653.538
644.261
637.835
634.347
633.847
636.343
641.801
650.147
661.273
YEAR: 16 DAY: 294 SAT.
312 REV. 4221
GMT
LONG
LAT
ALTITUDE SAT LST
21 11.900
11.556 42.360
628.392 21 58.1
21 12.000
11.439 42.725
628.573 21 57.8
21 12.100
11.320 43.089
628.753 21 57.4
21 12.200
11.200 43.453
628.934 21 57.0
21 12.300
11.079 43.818
629.115 21 56.6
21 12.400
10.957 44.182
629.295 21 56.2
21 12.500
10.833 44.545
629.475 21 55.8
21 12.600
10.709 44.909
629.655 21 55.4
21 12.700
10.583 45.273
629.835 21 55.0
SUBDIST
183.273
144.864
108.879
78.705
63.274
72.669
100.122
135.032
172.935
AZIM
145.733
140.072
130.505
112.680
80.885
46.092
24.965
13.790
7.355
ELEV
72.171
75.760
79.215
82.166
83.690
82.762
80.069
76.700
73.133
SL.DIST
657.585
647.017
639.262
634.424
632.569
633.721
637.865
644.940
654.851
YEAR: 16 DAY: 300 SAT.
312 REV. 4303
GMT
LONG
LAT
ALTITUDE SAT LST
10 13.100
11.339 45.140
631.092 10 58.5
10 13.200
11.214 44.777
630.918 10 58.1
10 13.300
11.090 44.413
630.744 10 57.7
10 13.400
10.967 44.049
630.570 10 57.3
10 13.500
10.845 43.685
630.396 10 56.9
10 13.600
10.724 43.321
630.221 10 56.5
10 13.700
10.605 42.957
630.047 10 56.1
10 13.800
10.487 42.593
629.872 10 55.7
10 13.900
10.369 42.228
629.697 10 55.4
SUBDIST
177.099
137.198
98.682
64.115
44.070
56.868
89.373
127.295
166.988
AZIM
27.388
31.700
39.440
56.172
96.285
142.875
163.880
173.106
178.038
ELEV
72.778
76.518
80.227
83.619
85.606
84.336
81.134
77.460
73.709
SL.DIST
657.331
646.724
638.921
634.024
632.103
633.186
637.259
644.266
654.112
YEAR: 16 DAY: 300 SAT.
312 REV. 4310
GMT
LONG
LAT
ALTITUDE SAT LST
21 7.700
12.416 43.107
630.881 21 57.4
21 7.800
12.296 43.471
631.051 21 57.0
21 7.900
12.175 43.834
631.220 21 56.6
21 8.000
12.053 44.198
631.390 21 56.2
21 8.100
11.930 44.562
631.559 21 55.8
21 8.200
11.805 44.926
631.728 21 55.4
SUBDIST
AZIM
184.350 111.348
163.237 99.484
150.921 84.939
149.584 69.032
159.501 54.006
178.804 41.483
ELEV
72.125
74.078
75.232
75.359
74.428
72.638
SL.DIST
660.040
653.936
650.710
650.404
653.021
658.526
YEAR: 16 DAY: 301 SAT.
312 REV. 4325
GMT
LONG
LAT
ALTITUDE SAT LST
21 23.000
8.720 42.605
630.946 21 57.9
21 23.100
8.602 42.969
631.114 21 57.5
21 23.200
8.482 43.333
631.281 21 57.1
21 23.300
8.362 43.697
631.449 21 56.7
21 23.400
8.240 44.061
631.616 21 56.4
21 23.500
8.117 44.425
631.782 21 56.0
SUBDIST
178.972
161.199
152.952
155.745
169.029
190.619
AZIM
226.234
238.953
253.876
269.332
283.286
294.652
ELEV
72.626
74.274
75.047
74.785
73.546
71.562
SL.DIST
658.653
653.622
651.471
652.229
655.885
662.389
YEAR: 16 DAY: 306 SAT.
312 REV. 4392
GMT
LONG
LAT
ALTITUDE SAT LST
10 8.800
12.309 44.756
628.626 10 58.0
10 8.900
12.185 44.392
628.443 10 57.6
SUBDIST
196.386
167.515
AZIM
53.824
63.307
ELEV
70.954
73.613
SL.DIST
661.106
652.272
24
10
10
10
10
10
10
9.000
9.100
9.200
9.300
9.400
9.500
12.062
11.940
11.819
11.700
11.582
11.464
44.028
43.663
43.299
42.935
42.570
42.206
628.259
628.076
627.893
627.709
627.525
627.342
10
10
10
10
10
10
57.2
56.9
56.5
56.1
55.7
55.4
144.956
131.991
131.495
143.603
165.576
194.096
76.199
92.644
110.830
127.503
140.681
150.398
75.735
76.971
77.017
75.861
73.789
71.156
646.262
643.156
642.997
645.789
651.495
660.039
YEAR: 16 DAY: 307 SAT.
312 REV. 4407
GMT
LONG
LAT
ALTITUDE SAT LST
10 24.200
8.496 44.890
628.267 10 58.2
10 24.300
8.371 44.526
628.083 10 57.8
10 24.400
8.248 44.162
627.898 10 57.4
10 24.500
8.126 43.798
627.714 10 57.0
10 24.600
8.005 43.433
627.530 10 56.6
SUBDIST
192.874
177.478
171.083
174.685
187.713
AZIM
312.561
300.561
287.001
273.218
260.677
ELEV
71.264
72.678
73.270
72.935
71.732
SL.DIST
659.578
654.766
652.846
653.846
657.752
YEAR: 16 DAY: 307 SAT.
312 REV. 4414
GMT
LONG
LAT
ALTITUDE SAT LST
21 18.500
9.936 42.247
632.120 21 58.2
21 18.600
9.819 42.612
632.273 21 57.9
21 18.700
9.701 42.976
632.425 21 57.5
21 18.800
9.581 43.339
632.577 21 57.1
21 18.900
9.461 43.703
632.729 21 56.7
21 19.000
9.339 44.067
632.881 21 56.4
21 19.100
9.216 44.431
633.032 21 56.0
21 19.200
9.092 44.794
633.183 21 55.6
21 19.300
8.967 45.157
633.334 21 55.2
SUBDIST
167.412
130.276
96.826
72.359
67.469
85.574
116.390
152.389
190.652
AZIM
190.293
197.572
210.210
233.389
267.766
296.284
312.358
321.309
326.767
ELEV
73.724
77.218
80.439
82.829
83.310
81.535
78.548
75.127
71.591
SL.DIST
656.567
647.265
640.799
637.255
636.681
639.085
644.432
652.648
663.625
In base ai parametri orbitali riportati relativi al TLE sopra riportato, sono listati i passaggi
del satellite PRISMA sopra l’area del CNR-IFAC attrezzata per campagne di telerilevamento
e posta all’interno del Parco di San Rossore. Il periodo di tempo esaminato va dal 1 settembre
2014 al 5 novembre 2014 in cui il satellite ha compiuto mille orbite.
4.2.1.1 MODALITA OPERATIVE
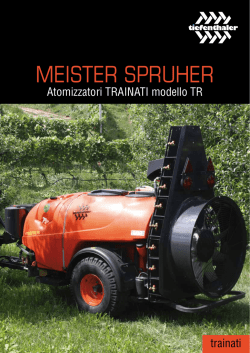
Ogni immagine acquisita sarà corredata da informazioni che ne permettano la
geolocalizzazione, in modo tale da poter ricostruire la geometria di acquisizione per ogni
punto di ogni singola immagine, come riportato in Fig.4.4, dove:
N:
Incl :
Psipo :
h:
H1 :
H2 :
Angle:
FZA:
MZA :
FOV :
Direzione del Nord
Inclinazione dell’orbita
Direzione di volo
Quota del satellite
Posizione del satellite
Posizione del punto osservato
Angolo di puntamento
Fly-by Zenith Angle
Minimum Zenith Angle
Campo di vista del sensore
25
Fig. 4-4: Geometria di acquisizione
Inoltre al fine di procedere alla calibrazione in volo il sistema dovrà puntare il Sole, la
Luna o alcune aree sulla Terra.
4.2.2 PAYLOAD OTTICI
A bordo della missione PRISMA saranno montate, accoppiate ad un unico telescopio, una
camera pancromatica ed una camera iperspettrale, costituita da due spettrometri ad immagine.
Il tutto, mostrato in Fig. 4.6, Fig. 4.9, avrà:
Consumo:
Dimensione:
Peso:
110 W
78 cm x 77 cm x 59 cm
209 kg
26
Fig. 4-5: Schema a blocchi dell’ottica.
Hyperspectral / PAN
Optical Head
Main Electronics
PASSIVE
RADIATOR
Redundant
Structure and
Thermal Control
Main
SBC
SLITS
MAIN PORT
COVER
(SUN
DIFFUSER)
TMA
FORE-OPTICS
S
H
U
T
T
E
R
SWIR
SPECTR
SWIR
FPA
SWIR
PE
VNIR
SPECTR
VNIR
FPA
VNIR
PE
PAN
OPTICS
PAN
FPA
PAN
PE
TC/TM
Science data
SDAB
28VDC
PDU
TEMPERATURE SENSORS
HEATERS
Heaters
power
Discrete cmd
HEATERS
SERVO
IN-FLIGHT
CALIBRATION
UNIT
SOLAR PORT
COVER
TEMP. SENSORS
Analog TM
Fig. 4-6: Diagramma a blocchi dell’ottica, dei sensori, dell’elettronica di prossimità (PE) e dei
SBC(Single Board Computer), SDAB (Scientific Data Acquisition Board) e PDU (Power Distribution
Unit).
4.2.2.1 TELESCOPIO
In
Tab. 4-7 sono riportate le principali caratteristiche del telescopio.
CARATTERISTICHE:
Configurazione:
Componenti ottici:
Lunghezza focale:
Diametro della pupilla di ingresso:
F number:
Campo di vista e swath al nadir:
IFOV:
TMA (Three Mirrors Anastigmatic) senza
ostruzione
n.3 specchi asferici
n.2 specchi di rinvio
620 mm
210 mm
2,95
2,770 – 30 km @ 620 km
48.4 µrad (GSD = 30 m @ 620 km)
Tab. 4-7: Caratteristiche del telescopio dalla missione PRISMA.
27
Fig. 4.5: Schema ottico del telescopio.
Fig. 4.6: Alloggiamento nella parte superiore del banco ottico del telescopio e del calibratore.
4.2.2.2 CAMERA PANCROMATICA
In Tab. 4-8 sono riportate le principali caratteristiche della camera pancromatica.
CARATTERISTICHE:
Campo di vista e swath al nadir:
Across-track pixels:
2,770 – 30 km @ 620 km
6000
28
Ground Sample Distance:
Dimensioni del pixel:
Dimensioni di una immagine:
5m
6,5 m x 6,5 m
da 30 km x 30 km a 30 km x 1800 km
(across-track x along-track)
108000 km2 (~46 GB compresa la
camera iperspettrale)
Acquisizione massima giornaliera:
Rivelatore:
Numero di bande:
Intervallo spettrale:
Quantizzazione del segnale:
Accuratezza radiometrica:
Segnali spuri:
Rapporto segnale rumore:
MTF:
1
all’interno di 400 – 700 nm
> 240
> 0,2 @ Nyquist frequency
Tab. 4-8: Caratteristiche della camera pancromatica dalla missione PRISMA.
(a)
(b)
Fig. 4.7: Schema ottico della camera pancromatica (a) e particolare dello schema di
funzionamento del separatore di campo (b).
4.2.2.3 CAMERA IPERSPETTRALE
In Tab. 4-9 sono riportate le principali caratteristiche della camera iperspettrale, costituita
da due spettrometri ad immagine, uno operante nel VNIR e l’altro nello SWIR.
CARATTERISTICHE:
Configurazione:
Tipo:
Campo di vista e swath al nadir:
Across-track pixels:
n.2 spettrometri ad immagine a prismi
push-broom
2,770 – 30 km @ 620 km
1000
29
Intervallo di campionamento spaziale
(Ground Sample Distance):
MTF:
Registrazione spaziale dei dati spettrali
(keystone):
Risoluzione spaziale:
Rivelatori:
Intervallo spettrale:
Numero di bande:
Intervallo di campionamento spettrale
(SSI):
Risoluzione spettrale:
Accuratezza spettrale:
Variazione Cross-track della lunghezza
d’onda centrale (smile / frown):
Guadagno del segnale:
Tempo di integrazione del segnale:
Quantizzazione del segnale:
Dimensioni di una immagine:
Acquisizione massima giornaliera:
Accuratezza radiometrica:
Segnali spuri:
Rapporto segnale rumore:
30 m
0,3 across track, 0,17 along track @
Nyquist frequency
> 0,1 della GSD
FWHM: 30 m x 45 m
n.2 SATURN VISIR con 1000x256
fotoelementi HgCdTe Focal Plane Array
della Sofradir customizzati.
VNIR: 400 – 1010 nm
SWIR: 920 – 2505 nm
VNIR: 66
SWIR: 171
10 nm
12 nm FWHM
± 0,1 nm
± 0,1 della SSI
............................
4,31 msec (pari a 232 fps)
12 bit
30 km x 30 km oppure
da 30 km x 30 km a 30 km x 1800 km
(across-track x along-track)
108000 km2 (~ 46 GB compresa la
camera pancromatica)
< 5%
media nulla e standard deviation minore
o uguale alla NESR
VNIR @ 400 – 1000 nm: > 200
VNIR @ 650 nm: > 600
SWIR @ 1000 – 1750 nm: > 200
SWIR @ 1550 nm: > 400
SWIR @ 1950 – 2350 nm: > 100
SWIR @ 2100 nm: > 200
Tab. 4-9: Caratteristiche della camera iperspettrale dalla missione PRISMA.
30
Fig. 4.8: Schema ottico della camera iperspettrale con i due spettrometri a prismi.
Fig. 4.9: Alloggiamento nella parte inferiore del banco ottico delle camere pancromatica e
iperspettrale.
31
Fig. 4.10: Dispersione spettrale VNIR/SWIR
4.2.2.4 CALIBRATORE
Il sistema di calibrazione a bordo comprende:
Calibrazione radiometrica assoluta usando il Sole come sorgente.
Calibrazione radiometrica relativa, calibrazione spettrale e linearietà con due lampade
a tungsteno ottimizzate per il VNIR e lo SWIR.
Calibrazione del buio con shutter sulla fenditura.
Queste calibrazioni saranno frequenti in quanto non comportano manovre del satellite,
come nel caso di:
Flat-field esterno
Osservazione di specifiche aree di test sulla Terra
Osservazione della Luna
Viene illuminata l’intera pupilla e l’intero FOV dello strumento. Il cammino ottico della
radiazione di riferimento è lo stesso della radiazione osservata. Sarà monitorata la
degradazione ed è assicurata la ridondanza delle lampade.
Fig. 4.11: Particolare del calibratore dello strumento PRISMA che evidenzia le lampade (a destra)
e la porta d’ingresso della radiazione solare (a sinistra)
32
4.2.2.5 RIVELATORI ED ELETTRONICA DI PROSSIMITA
Quì di seguito sono riportate le caratteristiche tecniche dei due rivelatori utilizzati.
CARATTERISTICHE:
Modello:
Tecnologia:
Formato:
Dimensione di ogni elemento
fotosensibile:
Risposte spettrali:
Temperatura di funzionamento:
SNR:
Uniformità di risposta:
Linearietà:
Efficienza quantica:
Modalità operativa:
Tempo di integrazione:
Massima capacità di carica:
Dinamica del segnale:
Rumore di lettura:
Guadagno:
Lettura:
Frequenza del segnale di uscita:
Velocità di lettura:
Customizzazione del SATURN VISIR
della Sofradir-EC
HgCdTe Focal Plane Array su CMOS
Read-Out Integrated Circuit
1000 x 256 elementi fotosensibili
30 µm x 30 µm
da 0,4 µm a 2,5 µm
173 K con raffreddamento Stirling
> 1000
< 7%
< 99,5%
> 60% senza coating antiriflesso
Integrazione durante la lettura
Tempo di integrazione programmabile
Guadagno programmabile per linee
Anti-blooming
4 ms
2,5 M e> 3 V (> 79 dB)
< 339 eprogrammabile per linee
programmabile per linee
fino a 8 MHz su 4 o 8 uscite analogiche
fino a 250 fps in full frame
4.2.3 PAYLOAD DATA HANDLING AND TRANSMISSION
Le principali caratteristiche tecniche e lo schema a blocchi del Payload Data Handling
and Transmission (PDHT) sono riportati rispettivamente in Tab. X.xx ed in Fig. X.xx.
33
CARATTERISTICHE:
Massimo bit-rate d’ingresso:
Dimensioni della memoria:
Numero di canali di downlink:
Data-rate di ogni canale:
600 Mbit/sec
32 GB (256 Gbit)
2
155 Mbit/sec
Tab. 4-10: Caratteristiche principali della PDHT.
Fig. 4.12: Schema del PDHT dello strumento PRISMA
34
Fig. 4.13 Flusso dati nella PDHT della misione PRISMA
35
4.3 SEGMENTO DI TERRA
Il Segmento di Terra è composto da:
• Mission Control Centre (MCC) / Satellite Control Centre (SCC), situato al Fucino
ed utilizzante la banda S (2 – 4 GHz) per le comunicazioni di comandi e controlli.
• Image Data Handling Segment (IDHS), situato a Matera ed utilizzante la banda X
(8 – 12 GHz) per la trasmissione dati.
4.3.1 IMAGE DATA HANDLING SEGMENT
L’Image Data Handling Segment (IDHS) ha la seguente struttura.
dove:
L0 PROC :
Discrimina tra immagini, housekeepings e dati di calibrazione.
L0QL PROC :
L1 PROC :
Trasforma i dati di livello 0 in dati radiometricamente corretti e
calibrati in radianza.
Genera le maschere delle nubi e di Sun glint.
36
L2 PROC :
Genera le radianze e le riflettanze a terra che sono
geometricamente corrette e geocodificate.
Fornisce i prodotti atmosferici.
37
5 SIMULAZIONE DELLE PRESTAZIONI
Digital Numbers
SIMULATORE
DELLA RISPOSTA
DELLO STRUMENTO
GENERATORE
IMMAGINI “REALI”
Parametri
atmosferici
SIMULATORE DEGLI
EFFETTI
DELL’ATMOSFERA
Riflettanza spettrale al suolo
GENERATORE
IMMAGINI “SINTETICHE”
Parametri della geometria
di acquisizione
Radianza spettrale al sensore
Parametri
strumentali
Per analizzare le prestazioni dei sensori ottici della missione PRISMA, per testare il
processamento dei dati a terra con particolare riguardo al funzionamento degli algoritmi
sviluppati, si è proceduto allo sviluppo di un simulatore seguendo lo schema riportato in Fig.
5.1.
Fig. 5.2: Schema generale per la simulazione delle prestazioni dello spettrometro ad immagine
della missione PRISMA
38
Al fine di ottenere una ricostruzione realistica delle immagini acquisite, è necessario
simulare il sistema fisico comprendente l’atmosfera e le interazioni della radiazione con i
costituenti atmosferici e con il suolo, tenendo conto delle condizioni geometriche di
illuminazione e osservazione, della variabilità spaziale e spettrale del terreno simulato e
dell’interazione con gas e aerosol lungo la colonna di atmosfera considerata. A questo scopo è
prevista l’integrazione con modelli di trasferimento radiativo atti a determinare i differenti
contributi alla radiazione ricevuta dal generico elemento di suolo osservato e a ricostruire
l’immagine acquisita in quota dal satellite.
39
5.1 GENERAZIONE DI IMMAGINI A PARTIRE DA
DATI REALI
Al fine di simulare le immagini che verranno acquisite dai sensori della missione PRISMA,
devono essere generate mappe di riflettanza del suolo osservato. A tal fine un metodo è quello
di utilizzare sensori con caratteristiche simili o migliori, già operativi da piattaforma
satellitare o aerea. Tale procedura comporterà la scelta del sensore adatto, l’ottenimento di
mappe validate di riflettanza al suolo, ottenute attraverso la correzione per gli effetti
dell’atmosfera delle immagini calibrate di radianza al sensore.
Nel nostro caso il sensore più simile alla camera iperspettrale della missione PRISMA
risulta essere Hyperion da vari anni operativo a bordo del satellite EO-1. Dato che la
larghezza dell’immagine a terra di Hyperion è 7,5 km invece di 30 km come nel caso di
PRISMA, si utilizzeranno immagini di Hyperion integrate sulla cartografia digitale
corrispondente.
5.1.1 PRE-ELABORAZIONE DEL DATO HYPERION E DEI
DATI AUSILIARI
Per testare tutta la catena di preprocessing, dalla calibrazione fino alla correzione
atmosferica e alla geolocazione, il dato Hyperion è stato acquisito in una delle forme meno
elaborate disponibili, e cioè a livello L1T. In tale forma il dato rappresenta la radianza
assoluta fornita come 16-bit signed integers in codifica Big-endian, con un fattore di scala pari
a 40 per la banda VNIR e 80 per la SWIR. Il dato varia nel caso in questione fra 0 (usato per
indicare un valore mancante) e approssimativamente 32.767.
Il dato L1T è radiometricamente corretto e geometricamente riferito a una proiezione
geografica fissata. L’immagine, quando possibile, è ortonormalizzata usando, se disponibile,
un DEM per correggere l’errore di parallasse dovuto all’orografia del terreno. Le bande sono
fornite in file separati, insieme a due file ausiliari (*.L1T e *.fgds) contenenti metadata
relativi all’acquisizione del dato.
Altri dati relativi alla zona coperta dal dato Hyperion considerato sono stati poi acquisiti
per effettuare analisi di tipo comparato e per mettere a punto una procedura di
ortonormalizzazione da usare ove il dato già ortonormalizzato non sia disponibile, o valutare
la qualità della ortonormalizzazione quando questa sia stata effettuata. In particolare si sono
ricercati un modello digitale del terreno di qualità sufficiente e una immagine di riferimento di
questo territorio, sempre con risoluzione spaziale molto elevata e correttamente georiferita ed
ortonormalizzata, insieme con delle informazioni cartografiche. Questi dati ausiliari sono stati
reperiti nell'archivio geografico della Regione Toscana, che ha messo a disposizione una serie
di immagini contenenti i DEM del territorio considerato (con risoluzione di 10m), la
cartografia della zona ed una serie di ortofoto a 50 cm di risoluzione spaziale, acquisite nelle
bande RGB da piattaforma aerea, ed opportunamente ortonormalizzate e georiferite.
5.1.1.1 RIPROIEZIONE
Una prima opera di pre-elaborazione ha visto la trasformazione dei dati sopracitati, forniti
in formati diversi e non sempre facilmente gestibili, in un unico formato compatibile con i più
comuni programmi di elaborazione delle immagini telerilevate. Si è poi passati alla
riproiezione dei dati citati, molti dei quali forniti originariamente in proiezione Gauss-Boaga
40
relativamente al datum di Montemario, in una più moderna ed standardizzata proiezione UTM
con Ellissoide Internazionale 1909 e Datum European 1950. Per comodità, l'insieme delle
immagini relative alla zona coperta dal dato Hyperion considerato sono state poi riunite con
un processo di mosaicatura in una sola immagine di altimetria e una sola immagine di
cartografia in formato vettoriale; per quanto riguarda le immagini relative alle ortofoto, per
evitare file di dimensioni eccessive si è preferito fare un mosaico in tre immagini in luogo di
una sola: una relativa alla parte Nord della "strisciata" di Hyperion, una relativa alla parte
centrale ed una relativa alla parte Sud.
5.1.1.2 ORTONORMALIZZAZIONE DEL DATO HYPERION
Nel corso dello studio per la pre-elaborazione del dato Hyperion si è anche studiata una
procedura di ortonormalizzazione disponibile in ambiente ENVI che potesse essere utilizzata
per un generico dato iperspettrale non georiferito acquisito da un sensore pushbroom (quindi
anche per il dato PRISMA). Tale procedura richiede solo la conoscenza della lunghezza
focale, la dimensione del dot pitch sul sensore e l’angolo di incidenza dell’acquisizione,
nonché l’ovvia disponibilità di un dato di riferimento ortonormalizzato e di un DEM di qualità
adeguate. Attraverso l’uso di Ground Control Point infatti è possibile, attraverso ENVI,
calcolare gli Exterior Orientation Parameter e quindi gli RPC della trasformazione che
trasforma il dato grezzo nel dato georiferito ed ortonormalizzato. Un primo dato
ortonormalizzato è stato quindi prodotto per valutare la qualità della georeferenziazione; la
ricerca dei GCP è resa difficile dalle dimensioni del pixel a Terra, e la qualità complessiva
risente anche della elevata direzione lungo la direzione di volo dell’immagine acquisita, ma
comunque l’accuratezza media dell’immagine risultante risulta essere ad una prima analisi
dell’ordine di un pixel, e quindi relativamente accettabile se si considera che il limite teorico
sotto cui non si può scendere è di mezzo pixel.
41
Fig. 5.3: Tre acquisizioni effettuate da Hyperion su Firenze e Prato.
5.1.2 ELABORAZIONI PRELIMINARI DEL DATO HYPERION
Di seguito sono presentati alcuni risultati di elaborazioni ottenute da dati acquisiti su
Firenze il 9 dicembre 2002 da Hyperion.
42
Fig. 5.4: Immagine “true color” (R = 630 nm;
G = 528 nm; B = 436 nm) di radianza al sensore.
Fig. 5.5: Immagine “true color” (R = 630 nm;
G = 528 nm; B = 436 nm) di reflettanza spettrale
al suolo.
4
100
90
80
3
70
Grass II pt.
2.5
Grass II pt.
Roof
2
Arno river
Gras I pt.
1.5
Refelctance (%)
At sensor Radiance (microW cm‐2 sr‐1 nm‐1)
3.5
60
Gras I pt.
50
Roof
Airport
40
Arno river
Airport
30
1
20
0.5
10
0
0
400
600
800
1000
1200
1400
1600
Wavelength (nm)
1800
2000
2200
400
2400
Fig. 5.6: Spettri di radianza al sensore dei 5
pixel indicati nell’immagine.
600
800
1000
1200
1400
1600
Wavelength (nm)
1800
2000
2200
2400
Fig. 5.7: Spettri della riflettanza al suolo dei 5
pixel indicati nell’immagine.
43
Fig. 5.8: Immagine “false color” (R = 855
nm; G = 630 nm; B = 528 nm) per evidenziare in
rosso la vegetazione.
Fig. 5.9: Immagine “false color” (R = 2194
nm; G = 1649 nm; B = 1074 nm) per evidenziare
caratteristiche geologiche.
5.1.2.1 CAMPAGNA DI TELERILEVAMENTO TELAER SU SAN
ROSSORE
Il 10 agosto 2012 abbiamo svolto una campagna di telerilevamento, comprendente la
caratterizzazione di suoli e dell’atmosfera attraverso una serie di misure a terra eseguite
durante la serie di sorvoli effettuati su San Rossore da TELAER STA, utilizzando lo scanner
multispettrale Daedalus AA1278 montato sull’aereo turboelica AP68TP-600 Viator. In
contemporanea sul parco è avvenuta anche un’acquisizione con lo spettrometro ad immagine
HYPERION e la camera multispettrale ALI montati sul satellite Earth Orbiter - 1.
Le immagini acquisite durante la campagna di telerilevamento sia dal sensore Hyperion
che dallo scanner multispettrale Daedalus sono state corrette sia radiometricamente che
atmosfericamente con gli algoritmi descritti nei capitoli 6.2 e 6.3.
In Fig. 5.10 e Fig. 5.11 sono riportate le immagini Hyperion corrette radiometricamente e
atmosfericamente.
44
Fig. 5.11: Immagine “true color” (R = 630
nm; G = 528 nm; B = 436 nm) di reflettanza
spettrale al suolo.
Fig. 5.10: Immagine “true color” (R = 630
nm; G = 528 nm; B = 436 nm) di radianza al
sensore su San Rossore.
15
Campo Erba Secca
Tetto/Piazzale
Misto conifere
Fiume
CampoLame
Lame
Piazzale
Misto conifere
Fiume
CampoLame
Lame
600
11
Riflettanza (per mille)
Radianza al sensore (uW/(sq cm ‐ sr ‐ nm))
13
9
7
5
3
500
400
300
200
100
1
‐1 400
Campo Erba Secca
700
900
1400
Lunghezza d'onda (nm)
1900
0
2400
Fig. 5.12: Spettri di radianza al sensore
estratti dall’immagine di radianza al sensore.
400
900
1400
Lunghezza d'onda (nm)
1900
2400
Fig. 5.13: Spettri della riflettanza al suolo
estratti dall’immagine di riflettanza al sensore.
45
Fig. 5.14: Immagine “false color” (R = 855
nm; G = 630 nm; B = 528 nm) per evidenziare in
rosso la vegetazione.
Fig. 5.15: Immagine “false color” (R = 2194
nm; G = 1649 nm; B = 1074 nm) per evidenziare
caratteristiche geologiche.
46
5.2 GENERAZIONE DI IMMAGINI SINTETICHE
5.2.1 PROCEDURA DI SIMULAZIONE
Il simulatore di dati sintetici permette di realizzare una versione realistica di quello che
potrà essere il dato acquisito da PRISMA, partendo da mappe tematiche o cartografia ad alta
risoluzione spaziale e associando ad esse informazioni spettrali derivanti da database con
risoluzione spettrale maggiore di quella prevista per PRISMA.
La procedura di simulazione parte da un dato iperspettrale generato in modo sintetico ad
altissima risoluzione spaziale e spettrale, e ad esso applica le varie funzioni di trasferimento
dovute al sistema di telerilevamento durante il processo di acquisizione.
Il punto di partenza della procedura è una mappa tematica del territorio ad alta risoluzione
spaziale, a cui associare gli spettri di riflettanza del suolo oppure combinazioni di tali spettri.
Nel nostro caso tale mappa viene generata classificando un mosaico di ortofoto a risoluzione
spaziale 2.5 m (REPERTORIO AEROFOTOGRAMMETRICO DELLA REGIONE
TOSCANAEdizione 2012, Cartografia della Regione Toscana CTR 10000 UTM-WGS84) e
di estensione pari a 30 km (cioè lo swath previsto per PRISMA). L’utilizzo di un’ortofoto per
generare la mappa tematica serve a creare un dato che mantenga una tessitura ed una
distribuzione di elementi naturali e antropici più realistica possibile. In Fig. 5.16 e Fig. 5.17
sono riportati il mosaico di ortofoto e la mappa tematica da esso estratta. La classificazione
del mosaico di ortofoto è stato realizzato tramite ENVI, applicando l’algoritmo di
classificazione supervised Maximum Likelihood ed utilizzando 10 classi caratterizzate
mediante selezione di regioni di interesse (ROI) sull’immagine. Così facendo si ottiene una
mappa tematica del suolo di interesse (Fig. 5.17).
Fig. 5.16: Mosaico di ortofoto a 2.5 m
Fig. 5.17: Mappa tematica di 10 classi del territorio a nord di Firenze (risoluzione al suolo: 2.5
m,12000 pixel x 3000 pixel)
Fig. 5.18: Immagine sintetica di riflettanza del territorio a nord di Firenze (risoluzione al suolo:
7.5 m, 4000 pixel x 1500 pixel)
47
Fig. 5.19: Immagine sintetica di radianza al sensore del territorio a nord di Firenze (risoluzione al
suolo: 30 m), con effetti dovuti alla presenza dell’atmosfera e MTF del sistema.
Alla mappa tematica sono stati associati gli spettri corrispondenti a ciascuna classe (vedi
Fig. 5.20). Gli spettri sono stati estratti da librerie spettrali note e in letteratura scientifica e
liberamente disponibili e accessibili (es. USGS spectral library o JPL spectral library), in
futuro si potranno anche prevedere campagne di misure a terra da effettuarsi con spettrometri
portatili tipo FieldSpec.
Fig. 5.20: Spettri di riflettanza utilizzati per ciascuna classe.
Fig. 5.21: MTF del sistema.
Per il calcolo della mappa di riflettanza a partire dalla mappa tematica, è stata messa a
punto una procedura software automatizzata che si occupa di:
48
Associare ad ogni zona della mappa tematica una combinazione di spettri, specificandone
la percentuale (ad esempio per un terreno coltivato può essere utile specificare un mixing
di suolo nudo e vegetazione). Il cubo di riflettanza così ottenuto ha risoluzione spaziale
pari a 2.5 m e risoluzione spettrale pari a 2 nm.
Effettuare una media spaziale degli spettri associati alla mappa tematica. La risoluzione
spaziale dopo tale media risulta degradata a 7.5 m. Tale passo introduce un ulteriore
mixing spettrale nelle zone di transizione da un tematismo all'altro (Fig. 5.18).
Notiamo che, a causa della geometria di acquisizione di tipo pushbroom di PRISMA, gli
angoli con cui sono osservati i singoli pixel risultano costanti lungo la colonna (la dimensione
along track di acquisizione), la lunghezza della strisciata è perciò ininfluente ai fini della
simulazione. Per semplicità e per ridurre il carico computazionale, ci si è limitati, negli
esempi riportati nelle Fig. 5.16, Fig. 5.17, Fig. 5.18, Fig. 5.19, ad una strisciata di dimensioni
minori di quelle across track (non ci sono ostacoli tecnici alla creazione di strisciate di
lunghezza definita dall’utente).
Tale procedura di creazione di mappe di riflettanza realistiche e con spettro e tessitura
pertinenti a quelli della corrispondente località reale (nel nostro caso il territorio Nord della
zona di Firenze, Italia) è sintetizzata nello schema di Fig. 5.27.
Utilizzando la mappa di riflettanza, viene simulata la propagazione del dato al sensore,
simulando la radianza ricevuta dal satellite in quota (Fig. 5.19) considerando sia i parametri
atmosferici che la geometria di acquisizione .
Per generare tale immagine simulata di radianza al sensore, è stata approntata una ulteriore
procedura software, sintetizzata nello schema di Fig. 5.26. Attualmente gli sviluppi di tale
software sono incentrati a considerare gli effetti di adiacenza ed includere un fattore di
roughness per il dato al suolo e gli effetti di direzionalità delle superfici osservate (i percorsi
tratteggiati nello schema indicano gli sviluppi futuri della procedura di simulazione).
Alle immagini simulate di radianza spettrale al sensore devono essere applicate le funzioni
di trasferimento dello strumento, sia spaziali sia spettrali, che tengono conto delle
caratteristiche delle ottiche, del rivelatore e dell’elettronica, in modo da ottenere i dati espressi
in digital number.
Benché nel caso reale l’atmosfera agisca sulla radiazione prima che essa raggiunga il
sensore, abbiamo preferito applicare le MTF spaziali prima della propagazione al sensore.
Questo procedimento consente di ridurre in modo consistente i tempi di elaborazione. In Fig.
Fig. 5.22 è mostrata una parte dell’immagine simulata ottenuta applicando prima il filtro
spaziale e poi gli effetti atmosferici.
Fig. 5.22 Immagine simulata applicando prima il filtro spaziale e poi gli effetti
atmosferici.
L’immagine simulata è stata anche generata secondo il caso “reale”, cioè applicando prima
il contributo atmosferico e poi la MTF spaziale, come mostrato in Fig. 5.23
49
Fig. 5.23 immagine simulata applicando prima gli effetti atmosferici e poi il filtro spaziale.
E’ stato verificato che questa procedura non compromette il risultato finale, le due
immagini sono state confrontate mostrando differenze sulla quinta cifra decimale come
mostrato in Fig. 5.24.
At sensor radiance (W m‐2 cm‐1 nm‐1)
1400
roof Atm_MTF
soil Atm_MTF
forest Atm_MTF
roof MTF_Atm
soil MTF_Atm
forest MTF_Atm
1200
1000
800
600
400
200
0
At sensor radiance difference (W m‐2 sr‐1 nm‐1)
400
900
1400
Wavelenght (nm)
1900
2400
a
0.0001
roof
soil
forest
0.00008
0.00006
0.00004
0.00002
0
400
900
1400
Wavelength (nm)
1900
2400
b
Fig. 5.24 Spettri acquisiti su medesimi pixel nelle due modalità di acquisizione (a) e loro
differenza (b)
50
Per quanto riguarda invece la funzione di trasferimento spettrale, essa è stata applicata sui
dati di radianza, cioè che già comprendono gli effetti dell’atmosfera.
Per simulare la MTF dello strumento è stato scelto un filtro gaussiano normalizzato con 24
coefficienti, la cui trasformata di Fourier a Nyquist valesse più di 0.3, sia across-track che
along-track, per il VNIR e lo SWIR, tali requisiti (PRS-MRD-0790 e PRS-MRD-0800) sono
stati estratti dal MRD (DC-IPC-2007-096 del 15/01/2008). Il filtro scelto è rappresentato in
Fig. 5. . La convoluzione con il filtro e la successiva, necessaria, decimazione, hanno l’effetto
di portare il dato alla risoluzione spaziale nominale di PRISMA di 30 m.
Notiamo come l’utilizzo di step spaziali da più risoluti all’inizio della catena di
processamento del dato a step meno risoluti alla fine permette la simulazione dei differenti
effetti fisici dovuti alla tessitura del suolo in esame, agli effetti atmosferici e allo strumento di
osservazione. I modelli di simulazione di ciascun segmento della catena vengono applicati al
dato più risoluto di partenza e integrati fino a giungere alla risoluzione finale, la stessa dei dati
PRISMA.
Per quanto riguarda la simulazione del campionamento spettrale di PRISMA sono stati
utilizzati i dati spettrali (λmin, λcentr, λmax) forniti da Selex ES (ex Selex Galileo) nel
documento PRS-TN-GAF-028_Issue2(Atmospheric Retrieval).doc e qui di seguito riportate.
In assenza di indicazioni, le ampiezze di banda sono state considerate FWHM.
Central
Lower
Upper
Bandwidth
λ [μm]
0,405
0,415
0,424
0,432
0,440
0,448
0,455
0,463
0,470
0,477
0,485
0,492
0,500
0,507
0,515
0,523
0,530
0,538
0,546
0,554
0,562
0,571
0,579
0,588
0,596
0,605
0,614
0,623
λMIN [nm]
399,9
410,465
419,653
428,059
436,014
443,72
451,299
458,814
466,283
473,68
481,003
488,388
495,839
503,361
510,959
518,637
526,399
534,25
542,193
550,232
558,37
566,61
574,954
583,404
591,963
600,632
609,413
618,305
λMAX [nm]
410,465
419,653
428,059
436,014
443,72
451,299
458,814
466,283
473,68
481,003
488,388
495,839
503,361
510,959
518,637
526,399
534,25
542,193
550,232
558,37
566,61
574,954
583,404
591,963
600,632
609,413
618,305
627,309
λ [nm]
10,565
9,188
8,405
7,955
7,706
7,578
7,515
7,469
7,396
7,324
7,385
7,451
7,522
7,598
7,678
7,762
7,851
7,943
8,039
8,138
8,24
8,344
8,451
8,559
8,669
8,78
8,892
9,005
51
0,632
0,641
0,650
0,660
0,669
0,679
0,689
0,698
0,708
0,718
0,728
0,739
0,749
0,759
0,770
0,780
0,790
0,801
0,812
0,822
0,833
0,844
0,854
0,865
0,876
0,887
0,897
0,908
0,919
0,930
0,940
0,951
0,962
0,972
0,983
0,993
1,004
1,015
0,925
0,934
0,943
0,953
0,962
0,972
0,981
0,991
1,001
1,011
1,021
627,309
636,426
645,655
654,994
664,442
673,998
683,66
693,423
703,285
713,243
723,292
733,428
743,645
753,939
764,304
774,735
785,224
795,767
806,356
816,985
827,649
838,34
849,053
859,781
870,52
881,263
892,006
902,745
913,474
924,19
934,892
945,576
956,24
966,884
977,507
988,111
998,696
1009,265
920,7
929,722
938,857
948,101
957,451
966,905
976,46
986,112
995,86
1005,698
1015,625
636,426
645,655
654,994
664,442
673,998
683,66
693,423
703,285
713,243
723,292
733,428
743,645
753,939
764,304
774,735
785,224
795,767
806,356
816,985
827,649
838,34
849,053
859,781
870,52
881,263
892,006
902,745
913,474
924,19
934,892
945,576
956,24
966,884
977,507
988,111
998,696
1009,265
1019,821
929,722
938,857
948,101
957,451
966,905
976,46
986,112
995,86
1005,698
1015,625
1025,637
52
9,117
9,228
9,339
9,449
9,556
9,661
9,763
9,862
9,958
10,049
10,136
10,217
10,294
10,365
10,43
10,489
10,542
10,589
10,629
10,664
10,691
10,713
10,729
10,739
10,743
10,743
10,738
10,729
10,717
10,701
10,684
10,664
10,644
10,624
10,604
10,585
10,569
10,556
9,022
9,134
9,244
9,35
9,454
9,555
9,653
9,747
9,839
9,927
10,012
1,031
1,041
1,051
1,061
1,072
1,082
1,093
1,103
1,114
1,124
1,135
1,146
1,157
1,167
1,178
1,189
1,200
1,211
1,222
1,233
1,244
1,255
1,266
1,277
1,288
1,299
1,310
1,321
1,332
1,343
1,354
1,365
1,376
1,387
1,398
1,409
1,420
1,431
1,442
1,453
1,463
1,474
1,485
1,496
1,506
1,517
1,528
1,538
1,549
1025,637
1035,73
1045,902
1056,148
1066,466
1076,851
1087,301
1097,812
1108,38
1119,002
1129,674
1140,393
1151,155
1161,958
1172,798
1183,671
1194,574
1205,504
1216,458
1227,433
1238,426
1249,433
1260,453
1271,481
1282,516
1293,555
1304,596
1315,635
1326,67
1337,699
1348,721
1359,732
1370,73
1381,714
1392,683
1403,633
1414,563
1425,472
1436,358
1447,22
1458,056
1468,865
1479,645
1490,396
1501,116
1511,805
1522,461
1533,083
1543,671
1035,73
1045,902
1056,148
1066,466
1076,851
1087,301
1097,812
1108,38
1119,002
1129,674
1140,393
1151,155
1161,958
1172,798
1183,671
1194,574
1205,504
1216,458
1227,433
1238,426
1249,433
1260,453
1271,481
1282,516
1293,555
1304,596
1315,635
1326,67
1337,699
1348,721
1359,732
1370,73
1381,714
1392,683
1403,633
1414,563
1425,472
1436,358
1447,22
1458,056
1468,865
1479,645
1490,396
1501,116
1511,805
1522,461
1533,083
1543,671
1554,224
53
10,093
10,172
10,246
10,318
10,385
10,45
10,511
10,568
10,622
10,672
10,719
10,763
10,803
10,84
10,873
10,903
10,93
10,954
10,975
10,993
11,008
11,019
11,029
11,035
11,039
11,04
11,039
11,035
11,029
11,021
11,011
10,999
10,984
10,968
10,95
10,93
10,909
10,886
10,862
10,836
10,809
10,78
10,751
10,72
10,689
10,656
10,622
10,588
10,553
1,559
1,570
1,580
1,591
1,601
1,612
1,622
1,632
1,642
1,653
1,663
1,673
1,683
1,693
1,703
1,713
1,723
1,733
1,743
1,752
1,762
1,772
1,781
1,791
1,801
1,810
1,820
1,829
1,839
1,848
1,857
1,867
1,876
1,885
1,894
1,903
1,913
1,922
1,931
1,940
1,949
1,958
1,967
1,975
1,984
1,993
2,002
2,011
2,019
1554,224
1564,741
1575,222
1585,666
1596,071
1606,439
1616,768
1627,059
1637,309
1647,521
1657,692
1667,823
1677,915
1687,965
1697,975
1707,945
1717,874
1727,762
1737,61
1747,417
1757,183
1766,909
1776,595
1786,24
1795,846
1805,411
1814,937
1824,423
1833,87
1843,278
1852,648
1861,978
1871,271
1880,525
1889,742
1898,921
1908,063
1917,168
1926,237
1935,27
1944,266
1953,227
1962,153
1971,044
1979,9
1988,722
1997,51
2006,264
2014,985
1564,741
1575,222
1585,666
1596,071
1606,439
1616,768
1627,059
1637,309
1647,521
1657,692
1667,823
1677,915
1687,965
1697,975
1707,945
1717,874
1727,762
1737,61
1747,417
1757,183
1766,909
1776,595
1786,24
1795,846
1805,411
1814,937
1824,423
1833,87
1843,278
1852,648
1861,978
1871,271
1880,525
1889,742
1898,921
1908,063
1917,168
1926,237
1935,27
1944,266
1953,227
1962,153
1971,044
1979,9
1988,722
1997,51
2006,264
2014,985
2023,673
54
10,517
10,481
10,444
10,406
10,368
10,329
10,29
10,251
10,211
10,171
10,131
10,091
10,051
10,01
9,97
9,929
9,888
9,848
9,807
9,766
9,726
9,686
9,645
9,605
9,566
9,526
9,486
9,447
9,408
9,369
9,331
9,292
9,254
9,217
9,179
9,142
9,105
9,069
9,033
8,997
8,961
8,926
8,891
8,856
8,822
8,788
8,754
8,721
8,688
2,028
2,037
2,045
2,054
2,062
2,071
2,079
2,088
2,096
2,105
2,113
2,121
2,130
2,138
2,146
2,154
2,163
2,171
2,179
2,187
2,195
2,203
2,211
2,219
2,227
2,235
2,243
2,251
2,259
2,266
2,274
2,282
2,29
2,298
2,305
2,313
2,321
2,328
2,336
2,343
2,351
2,358
2,366
2,373
2,381
2,388
2,396
2,403
2,41
2023,673
2032,329
2040,951
2049,542
2058,101
2066,629
2075,125
2083,591
2092,026
2100,43
2108,805
2117,149
2125,465
2133,751
2142,008
2150,236
2158,436
2166,607
2174,751
2182,866
2190,954
2199,015
2207,048
2215,054
2223,033
2230,985
2238,911
2246,81
2254,683
2262,53
2270,35
2278,145
2285,913
2293,656
2301,373
2309,064
2316,729
2324,369
2331,983
2339,572
2347,135
2354,673
2362,184
2369,671
2377,131
2384,566
2391,975
2399,359
2406,716
2032,329
2040,951
2049,542
2058,101
2066,629
2075,125
2083,591
2092,026
2100,43
2108,805
2117,149
2125,465
2133,751
2142,008
2150,236
2158,436
2166,607
2174,751
2182,866
2190,954
2199,015
2207,048
2215,054
2223,033
2230,985
2238,911
2246,81
2254,683
2262,53
2270,35
2278,145
2285,913
2293,656
2301,373
2309,064
2316,729
2324,369
2331,983
2339,572
2347,135
2354,673
2362,184
2369,671
2377,131
2384,566
2391,975
2399,359
2406,716
2414,048
55
8,655
8,623
8,591
8,559
8,528
8,496
8,465
8,435
8,405
8,375
8,345
8,315
8,286
8,257
8,228
8,2
8,171
8,143
8,116
8,088
8,06
8,033
8,006
7,979
7,952
7,926
7,899
7,873
7,847
7,82
7,794
7,769
7,743
7,717
7,691
7,665
7,64
7,614
7,589
7,563
7,537
7,512
7,486
7,461
7,435
7,409
7,383
7,357
7,331
2,418
2,425
2,432
2,439
2,447
2,454
2,461
2,468
2,475
2,482
2,489
2,496
2,503
2414,048
2421,353
2428,632
2435,885
2443,111
2450,311
2457,484
2464,63
2471,75
2478,842
2485,906
2492,943
2499,952
2421,353
2428,632
2435,885
2443,111
2450,311
2457,484
2464,63
2471,75
2478,842
2485,906
2492,943
2499,952
2506,933
7,305
7,279
7,253
7,226
7,2
7,173
7,146
7,119
7,092
7,065
7,037
7,009
6,981
Tab. 5-1 Dati spettrali (λmin, λcentr, λmax) forniti da Selex es
Dopo la propagazione alla sommità dell’atmosfera, i dati da noi prodotti hanno una
risoluzione spettrale di 2 nm, quindi per ottenere un dato spettrale simile a quello di PRISMA
è necessario effettuare un integrale tra il dato ad alta risoluzione spettrale e la funzione di
trasferimento del singolo canale.
Le funzioni di trasferimento dei singoli canali spettrali sono state progettate di forma
gaussiana, la cui FWHM corrispondesse per eccesso all’ampiezza di banda riportata
nell’ultima colonna della tabella.
Simulated at- sensor radiance
Roof
At sensor radiance (W m^-2 sr-1 nm-1)
800
PRISMA VNIR
PRISMA SWIR
HI-RES 2 nm
700
600
500
400
300
200
100
0
400
900
1400
Wavelength (nm)
56
1900
2400
a
At sensor radiance (W m-2 sr-1 nm-1)
1400
Simulated at-sensor radiance spectra
Vegetation
1200
PRISMA VNIR
PRISMA SWIR
HI-RES 2nm
1000
800
600
400
200
0
400
900
1400
Wavelenght (nm)
1900
2400
b
Fig. 5.25 Spettri estratti dall’ immagine simulata prima e dopo il filtraggio spettrale per
(a) un pixel corrispondente ad un tetto e (b) un pixel di vegetazione.
Nei due grafici in Fig. 5.25 sono rappresentati due spettri estratti dall’ immagine simulata
prima e dopo il filtraggio spettrale, per un pixel vegetato e uno corrispondente ad un tetto.
57
Fig. 5.26: Schema della catena di simulazione.
58
Fig. 5.27: Processo di realizzazione delle mappe di riflettanza.
59
5.2.2 MODELLI E ACCORGIMENTI UTILIZZATI NELLA
PROCEDURA DI SIMULAZIONE
5.2.2.1 EFFETTI DOVUTI ALL’ATMOSFERA
Disponendo delle mappe di riflettanza spettrale a terra (eventualmente filtrate utilizzando
secondo la corrispondente MTF come descritto nel paragrafo 5.2) e dei valori dei parametri
sia della geometria di acquisizione che dell’atmosfera, si otterranno le immagini di radianza
spettrale al sensore attraverso la simulazione degli effetti atmosferici.
Utilizzando il modello seguente (attualmente non comprensivo di effetti di adiacenza) si
calcola la radianza al sensore Lsen :
Lsen ( , sun , view , )
E g ( , sun ) ( )
T ( , view ) L path ( , view , )
Eq. 5-1
dove è la lunghezza d’onda, sun è l’angolo zenitale solare (calcolato in funzione di
latiotudine, longitudine e ora del giorno, view è l’angolo zenitale di vista del satellite, è
l’angolo azimutale relativo tra le direzioni di vista del satellite e del sole, E g è la irradianza
che arriva al suolo, T è la trasmittanza lungo la direzione di vista e L path è la path radiance.
I contributi sono rappresentati nella seguente figura.
sun
( )
L path ( , view , )
view
T ( , view )
E g ( , sun )
Fig. 5.28: Modello del sistema Sole – atmosfera – satellite per la simulazione della radianza al
sensore osservata dal satellitr.
I contributi:
E g ( , sun )
L path ( , view , )
T ( ,view )
60
sono ricavati dal modello di traferimento radiativo MODTRAN (versione attuale 5.2.1)
impostando la corretta geometria di acquisizione ed una risoluzione spettrale doppia rispetto
alla risoluzione spettrale del dato di riflettanza al suolo utilizzato.
L’utilizzo del pacchetto MODTRAN presuppone la messa a punto di procedure, in parte
automatizzate, di lettura e successiva conversione dei dati relativi alla propagazione della luce
in atmosfera, al fine di poterli utilizzare con successo per ricostruire i differenti contributi alla
radianza osservata dal sensore in quota.
Il valore di riflettanza ( ) è ottenuto dall’immagine (cubo) di input, per ogni valore della
lunghezza d’onda e per ogni pixel. I valori spettralmente risolti, ottenuti dal modello
MODTRAN, sono mediati per ottenere spettri corrispondenti al dato di riflettanza utilizzato
come input. La radianza al sensore ottenuta ha quindi la stessa risoluzione spettrale del dato di
partenza. Tale risoluzione è sovrabbondante rispetto al corrispondente dato PRISMA, allo
scopo di presentare un dato ad alta risoluzione per la simulazione degli effetti dovuti alle
ottiche e alle altre componenti del sensore.
61
5.2.2.2 GEOMETRIA E MEMORIZZAZIONE DEL DATO UTILIZZATI
NELLA IMPLEMENTAZIONE SOFTWARE
Per quanto riguarda l’implementazione software della procedura di generazione
dell’immagine di radianza spettrale al sensore, realizzata in linguaggio IDL ed eseguibile
autonomamente su una qualsiasi distribuzione (liberamente scaricabile) di IDL Virtual
Machine (versione 7 o successive), la procedura utilizza le seguenti proprietà di dipendenza
spaziale e spettrale del dato rappresentate nella seguente figura.
Satellite
position
FOV
wavelength ()
generic image row
across track (x) direction
Fig. 5.29: Geometria di acquisizione: modello software.
I dati sono rappresentati in memoria con le seguenti dimensioni:
L’irradianza al suolo è invariante per traslazione: array 1D (risolta solo spettralmente)
La path radiance e la trasmittanza sono rappresentate come array 1D risolti
spettralmente e calcolati per tre colonne dell’immagine: laterale sinitra, centrale e
laterale destra, i valori intermedi sono interpolati linearmente.
La riflettanza al suolo (input) è memorizzata su disco come un cubo 3D risolto sia
spazialmente che spettralmente (BSQ).
La geometria di acquisizione (angoli di vista zenitale view e azimutale relativo per
ogni pixel sono rappresentati come una matrice 2D in x e y in quanto costanti
spettralmente).
La radianza al sensore è memorizzata su disco come un cubo 3D risolto sia
spazialmente che spettralmente (BIL).
Tale rappresentazione sfrutta pesantemente la natura array-oriented del linguaggio IDL e
nel contempo si presta ad implentazioni successive semplicemente variando la dimensionalità
delle grandezze per la rappresentazione di sistemi più generali. Ad esempio, differenze di
illuminazione del suolo per effetto della differente pendenza della superficie osservata sono
rappresentabili utilizzando una matrice 3D (risolta sia spazialmente che spettralmente) per
scalare conseguentemente l’irradianza al suolo in funzione dell’angolo tra la normale al suono
e la direzione zenitale del sole sun : questo permette facilmente l’implementazione di un
modello digitale di elevazione (DEM) e quindi la gestione di immagini in cui la topografia
gioca un ruolo non trascurabile, nonché l’utilizzo di mappe di “ruvidità” del suolo (per la
62
simulazione di campi arati, boschi, e di tutti gli effetti superficiali a risoluzione spaziale subpixel). Analogamente, un fattore di scala lungo la direzione across track, permette
l’implementazione di una funzione di BRDF per la superficie osservata.
Gli effetti di adiacenza tra pixel attigui (al momento trascurati dal modello) saranno
implementati attraverso un ulteriore filtraggio spaziale dell’immagine di radianza al sensore, a
partire dal dato generato dalla procedura corrente.
63
5.2.2.3 SIMULAZIONE DELLA RISPOSTA DEL SISTEMA
La simulazione della risposta in tensione Vout di un sensore in una banda è data dalla
seguente formula (per chiarezza le dimensioni fisiche sono rappresentate in parentesi quadre):
Vout [V ] s[ V / N e ] F f [ sr ] Aground [m 2 ] [ s]
Q( λ)[ N e /N ph ] Ls ( λ)[W m- 2 sr -1 nm-1 ] Topt ( λ)
hc / λ[ J/N ph ]
d[nm]
Eq. 5-2
dove:
s è la sensibilità del dispositivo in V / N e ;
F f è il fill factor (da impostare a 1 se è già compreso nella quantum efficiency Q);
è l’angolo solido sotteso dalla pupilla di ingresso in sr :
Apupil
H2
;
Aground è l’area osservata al suolo in m 2 ;
è il tempo di integrazione in s ;
Q (λ ) è la quantum efficiency del dispositivo in N e /N ph ;
-2
-1
-1
Ls (λ) è la radianza spettrale in W m sr nm ;
Topt (λ) è la trasmittanza spettrale del sistema ottico;
hc / λ è l’energia del singolo fotone di lunghezza d’onda espressa in J/N ph ;
Topt (λ) è l’area del pixel del detector in m 2 ;
c è la velocità della luce ( 299792458 m s -1 );
h è la costante di Plank ( 6.626176 10 34 J s ).
Vale inoltre la relazione:
Aground Apupil
P
Eq. 5-3
f2
con:
P area del singolo pixel del detector;
f : lunghezza focale;
Apupil : area della pupilla di ingresso delle ottiche in m 2 .
Il termine
[ N e /N ph ] Ls ( λ)[W m - 2 sr -1 nm -1 ] Topt ( λ)
hc / λ[ J/N ph ]
rappresenta i fotoni generati nel pixel
per unità di lunghezza d’onda, per secondo, per unità di area e per unità di angolo solido. Il
Q ( λ )[ N e /N ph ] Ls ( λ )[W m - 2 sr -1 nm -1 ] Topt ( λ )
d[nm ]
rappresenta gli elettroni
termine
hc / λ[ J/N ph ]
generati nel pixel per secondo, per unità di area e per unità di angolo solido.
Il simulatore distingue, per semplicità, due casi:
simulazione della radianza spettrale (sensore iperspettrale): il dato spettralmente
risolto è filtrate con la corrispondente MTF spettrale data la difficoltà nella
modellizazione di tutti i parametri precedenti per ciascuna banda;
simulazione della risposta a banda larga (pancromatica).
64
5.2.2.3.1 INTEGRAZIONE SPETTRALE DEL DATO PANCROMATICO
Dato che il dato pancromatico viene confrontato con la radianza spettrale, è necessario
riportarlo ad unità di radianza (pancromatica).
La radianza pancromatica Ls (radianza media sulla banda di interesse) viene quindi
definita come:
Q( λ) Ls ( λ)Topt ( λ)
d
hc / λ
Ls
Eq. 5-4
Q( λ)Topt ( λ)
hc / λ d
dove il termine:
K ( N e J 1 )
Q( λ)Topt ( λ)
hc / λ
d Eq. 5-5
rappresenta la costante di normalizzazione che restituisce le corrette unità fisiche.
5.2.2.3.2 RISPOSTA IN TENSIONE DEL DATO PANCROMATICO
La procedura software (sviluppata in linguaggio IDL) per il calcolo della radianza
pancromatica media permette di ricavare da Ls la tensione con una semplice relazione di
proporzionalità. La formula per il calcolo del numero di fotoelettroni per unità di lunghezza
d’onda diviene infatti:
N e [nm -1 ] F f [ sr ] Aground [m 2 ] [ s] K [ N e J 1 ] Ls [W m - 2 sr -1 nm -1 ] Eq. 5-6
e la formula per ilcalcolo di Vout diventa:
Vout [V nm-1 ] s[V / N e ] N e [nm -1 ]
s[V / N e ] F f [ sr ] Aground [m 2 ] [ s] K [ N e J 1 ] Ls [W m - 2 sr -1 nm -1 ]
Eq. 5-7
dove:
s è la sensibilità del dispositivo in V / N e ;
F f è il fill factor (da impostare a 1 se è già compreso nella quantum efficiency Q);
è l’angolo solido sotteso dal pixel in sr ;
Aground è l’area del pixel al suolo in m 2 ;
è il tempo di integrazione in s ;
Q( λi ) è la quantum efficiency del dispositivo nella banda i-esima in N e /N ph ;
Ls i è la radianza spettrale in W m- 2 sr -1 nm-1 nella banda i-esima;
Topt ( λi ) è la trasmittanza spettrale del sistema ottico nella banda i-esima;
hc / λi è l’energia del singolo fotone di lunghezza d’onda λi espressa in J/N ph .
Vout può essere visto come il valore della tensione per una banda equivalente di larghezza
unitaria di 1 nm . Analogamente la lunghezza d’onda di centro equivalente è ricavabile
da:
65
Q( λ) λTopt ( λ)
hc / λ
Q( λ)Topt ( λ)
hc / λ
d
. Eq. 5-8
d
5.2.2.3.3 RISPOSTA IN TENSIONE DEL DATO IPERSPETTRALE
Data la difficoltà nel modellizzare il comportamento del sensore e delle ottiche all’interno
di ciascuna banda spettrale, la risposta del sensore viene simulata a partire da da:
radianza al sensore (dopo il filtraggio spettrale gaussiano che abbassa la risoluzione
del dato riportandolo alla stessa risoluzione del dato PRISMA usando i dati Galileo
riportati in par. 5.2.1;
Calcolo del flusso di fotoelettroni e della corrispondente risposta del sensore in
tensione per ogni banda.
La risposta in tensione Vout i per unità di lunghezza d’onda per la banda i-esima
(corrispondente alla lunghezza d’onda centrale λi ) è quindi data da:
Q( λi ) Ls iTopt ( λi )
Vout i [V nm-1 ] s[V / N e ] F f [ sr ] Aground [m 2 ] [ s]
Eq. 5-9
hc / λi
dove:
s è la sensibilità del dispositivo in V / N e ;
F f è il fill factor (da impostare a 1 se è già compreso nella quantum efficiency Q);
è l’angolo solido sotteso dal pixel in sr ;
Aground è l’area del pixel al suolo in m 2 ;
è il tempo di integrazione in s ;
Q( λi ) è la quantum efficiency del dispositivo nella banda i-esima in N e /N ph ;
Ls i è la radianza spettrale in W m- 2 sr -1 nm-1 nella banda i-esima;
Topt ( λi ) è la trasmittanza spettrale del sistema ottico nella banda i-esima;
hc / λi è l’energia del singolo fotone di lunghezza d’onda λi espressa in J/N ph .
ossia la risposta è direttamente proporzionale a Ls i (ossia dei coefficienti i calcolati su ogni
banda possono essere utilizzati per sostituire i parametri sopra elencati):
Vout i i Ls i s[V / N e ] N e out i [nm-1 ] Eq. 5-10
dove N e out è larisposta in fotoelettroni per unità di lunghezza d’onda:
Q( λi ) Ls iTopt ( λi )
N e out i [nm-1 ] F f [ sr ] Aground [m 2 ] [ s]
Eq. 5-11
hc / λi
Moltiplicando per la larghezza della banda L si ottengono, rispettivamente, i valori in
tensione e in elettroni totali per la banda.
66
5.2.2.3.4 RISPOSTA IN DIGITAL NUMBER DI UNA BANDA GENERICA
Data la risposta in tensione V di una banda generica (o della banda pancromatica) la
risposta in digital number (DN) è calcolata riportando il dato su una scala lineare e discreta
fissando due valori Ls max e Ls min (corrispondenti ai segnali massimo e minimo teorici di
radianza) e la dinamica N del sistema in bit. Da Ls max e Ls min si ricavano le tensioni
corrispondenti Vmax e Vmin :
Vmax,min Ls max,min Eq. 5-12
con fattore di conversione da radianza a tensione. La dinamica di N bit fissa uno step di
discretizzazione V :
V V
V max N min
2
corrispondente ad uno step di radianza L :
V Ls max Ls min
L
2N
così che il segnale di una banda generica è acquisito dall’ADC tra i valori di tensione Vmin ,
Vmax come Dout (espresso in DN) secondo la formula:
L Ls min
V Vmin
int s
Dout int out
, Eq. 5-13
V
L
dove l’operatore int indica l’arrotondamento alla parte intera.
La conversione opposta per passare da unità in DN a unità di radianza è:
Ls Dout L Ls min
con un errore massimo di arrotondamento L . Alternativamente si possono considerare un
offset O e un guadagno G pari a, rispettivamente:
O Ls min ,
L L
G L s max N s min .
2
I valori Ls min , Ls max , sono calcolabili come:
Ls min : radianza al sensore nell’area di interesse per il valore massimo dell’angolo
zenithale solare (punto con elevazione solare più bassa sull’orizzonte) per riflettanza del
suolo nulla;
Ls max : radianza al sensore nell’area di interesse per il valore minimo dell’angolo zenithale
solare (punto con elevazione solare più alta sull’orizzonte) per riflettanza del suolo
massima per la zona di interesse (per esempio 0.9).
5.2.2.4 SIMULAZIONE DEI CONTRIBUTI DI RUMORE
Le immagini acquisite da sensori per telerilevamente sono affette da vari tipi di rumore,
che possono essere suddivisi principalmente in quattro gruppi:
- Rumore periodico: è un tipo di disturbo che può essere sia stazionario che non
stazionario, una possibile causa può essere l’interferenza elettromagnetica tra
componenti, è sostanzialmente deterministico ed è visibile sull’immagine come un
pattern spaziale periodico la cui ampiezza può essere costante o no, e così anche la
fase.
67
-
-
-
Rumore coerente: questo tipo di disturbo è di natura parzialmente deterministica ed è
visibile sulle immagini come un pattern spaziale irregolare. Per quanto riguarda
immagini iperspettrali, come quelle del sensore PRISMA, esso pùò produrre pattern
differenti per ciascuna banda, in questo caso il rumore è definito spazialmente e
spettralmente coerente. Il pattern spaziale di rumore è originato, per i sensori a
matrice, da una distribuzione di sensibilità non uniforme tra gli elementi che
compongono il CCD, ed è quindi organizzato per righe. Tradizionalmente questo tipo
di disturbo viene rimosso attraverso la calibrazione flat-field. Tale operazione però
non è sempre attuabile, soprattutto con sensori aventi elevato range dinamico: è infatti
necessario disporre di sorgenti di laboratorio con uscita controllabile con elevata
accuratezza sia spaziale che spettrale ed anche estremamente stabili nel tempo; inoltre
il passare del tempo può modificare la risposta del detector. In Fig. 1 è rappresentata
schematicamente l’origine dei pattern spaziali di rumore per uno spettrometro ad
immagine di tipo pushbroom.
Rumore casuale (random): Questo tipo di rumore ha natura completamente stocastica
e non mostra nessun tipo di struttura o ordine. E’ rumore “standard” che affligge ogni
tipo di immagine digitale. Può essere dipendente dal segnale (rumore fotonico) oppure
no (rumore termico, rumore di read-out, ecc.). Generalmente questo tipo di rumore è
quello che limita maggiormente il rapporto segnale/rumore (SNR), quindi se ne deve
tenere conto in modo accurato.
Rumore isolato: Anche il rumore isolato ha natura stocastica, ma è caratterizzato da
una perturbazione forte nell’ampiezza del segnale, che si manifesta in un numero
limitato di pixel, che appaiono saturati o neri. Questo tipo di disturbo generalmente
non rappresenta un grosso problema, perché non è sempre presente e riguarda un
numero molto limitato di pixel.
Fig. 5.30 Rappresentazione schematica di uno spettrometro ad immagine
pushbroom, la sensibilità dei singoli elementi non è uniforme. Poiché essa dipenda
dalla lunghezza d’onda (riga del CCD) il disturbo è coerente anche spettralmente
oltre che spazialmente.
68
5.2.2.4.1 GENERAZIONE DI IMMAGINI SIMULATE TENENDO CONTO DEI VARI
CONTRIBUTI DI RUMORE ALEATORIO
Per quanto riguarda le immagini iperspettrali simulate di PRISMA sono stati considerati
inizialmente i soli contributi random, mentre i contributi di rumore coerente (pattern noise)
verranno considerati in seguito.
I dati forniti da Selex come caratteristiche del le ottiche e del CCD:
- Pixel pitch: 30 μm
- Integration time: 4.31 ms
- Focal length: 620 mm
- Entrance pupil diameter: 210 mm
- Dark current: TBD
- Read-out noise: <150 e con Gain 1 e <350 e con Gain 2
In generale, per un dato pixel di un generico sensore iperspettrale:
, ,
,
, ,
dove:
, , è il segnale misurato, che può essere espresso in varie unità di misura (vedi
par. 5.2.2.3).
, rappresenta il pattern noise.
, , rappresenta il segnale ideale, senza rumore.
rappresenta I vari contributi di rumore additivo.
In si trovano: il contributo di rumore fotonico, ch e è dipendente dal segnale in quanto la
sua standard deviation è proporzionale alla radice quadrata del numero di fotoni che arrivano
sull’elemento fotosensibile:
Poi il contributo del Read out noise e quello dalla dark current che generalmente sono
formiti come parametri nei data sheet del CCD, e sono indipendenti dal segnale.
I contributi di rumore random sono stati aggiunti alle immagini di radianza
precedentemente simulate. In Fig. 5.31 si può vedere un dettaglio della banda a 660 nm prima
e dopo l’aggiunta di rumore.
a
b
Fig. 5.31 Dettaglio dell’immagine simulata per la banda a 660 nm
prima (a) e dopo l’aggiunta di rumore (b)
69
70
6 I PRODOTTI
6.1 ORGANIZZAZIONE DEI PRODOTTI DI PRISMA
In base alle richieste di ASI i dati PRISMA saranno forniti a vari livelli di processamento
in modo da convertire i “digital number”, forniti dai due sensori ottici del payload, in unità
fisiche di interesse.
I vari prodotti potranno contenere le seguenti classi:
• Parametri strumentali
• Radianze al sensore per ogni canale del sensore iperspettrale e per la camera
pancromatica
• Riflettanze a terra per ogni canale del sensore iperspettrale e per la camera
pancromatica
• Mappe di parametri geofisici, geochimici, biofisici, biochimici
• Ulteriori parametri derivati di interesse per gli utenti
Inoltre saranno forniti ulteriori informazioni, rilevanti per l’utilizzo dei prodotti, quali:
• Informazioni per localizzare le immagini acquisite
• Dati relative alla geometria di vista ed alla posizione del Sole
• Altre annotazioni quali le maschere di classificazione e di utilizzabilità
• L’altimetria del terreno
• Dati che permettano di convertire i “digital number” forniti dagli strumenti in unità
fisiche di interesse
• Flags che indichino la qualità del dato
Fig. 6.1: Schema di generazione dei prodotti della missione PRISMA
Come mostrato sinteticamente in
Fig. 6.1, i prodotti della missione sono generati gerarchicamente a partire dai dati ripresi
dai due sensori ottici, secondo il seguente ordine.
Prodotti di livello 0:
71
1. Dati raw formattati, inclusi i relativi metadati
Prodotti di livello 1, ottenuti applicando la calibrazione radiometrica ai dati di livello 0:
1. Radianza spettrale al top dell’atmosfera (PAN)
2. Radianza spettrale al top dell’atmosfera (iperspettrale)
I prodotti di livello 1 includeranno:
cloud mask
sun glint mask
calibration and characterisation data
data mask (identifica la classe del pixel: acqua, vegetazione, foresta, coltivato, non
vegetato, nuvola, neve)
Prodotti di livello 2b, ottenuti applicando la correzione atmosferica e la geocodifica su
elissoide terrestre ai dati di livello 1:
1. Radianza spettrale geolocalizzata (PAN)
2. Radianza spettrale geolocalizzata (Iperspettrale)
Prodotti di livello 2c, ottenuti applicando la correzione atmosferica e la geocodifica su
elissoide terrestre ai dati di livello 1:
1. Riflettanza spettrale (PAN)
2. Riflettanza spettrale (Iperspettrale)
Aerosol optical thickness and Angstrom exponent maps
Vapor acqueo
Cloud optical thickness maps
Prodotti di livello 2d, ottenuti applicando la la geocodifica con DEM (Digital Elevation
Model) ai dati di livello 2c:
1. Riflettanza spettrale geocodificata
2. Riflettanza spettrale geocodificata
I prodotti di livello 1 e 2, secondo le indicazioni di ASI, saranno generati in
Hierarchical Data Format (HDF).
Nella
Tab. 6-1 vengono riassunte le principali caratteristiche dei prodotti come erano stati
individuati per la missione JHM precursore di PRISMA. Per ciascuno di essi viene indicato il
set di bande più rilevanti ai fini della generazione del prodotto in esame.
Livello
Calibrazione
Level 0b
Tipo di prodotto
Correzione radiometrica
Tabella dark offset
Correzione radiometrica
Tabella dei guadagni
Sensore
Iperspettrale
Correzione radiometrica
Tabella guadagni e offset
PAN
Caratterizzazione radiometrica
Caratterizzazione spettrale
Elementi difettosi del sensore
Dati dell’immagine
Pre-/Post-dati dell’immagine
Iperspettrale
Iperspettrale
Iperspettrale
Iperspettrale
Iperspettrale
PAN
Iperspettrale
PAN
72
Descrizione
Offsets da on-board pre- e post-calibrazione
dell’immagine
Coefficiente (derivata prima) della funzione
polinomiale di calibrazione per trasformare i DN
in unità fisiche
Coefficiente (derivata prima e offset) della
funzione polinomiale di calibrazione per
trasformare i DN in unità fisiche
Risposta spaziale non uniforme, striping
Smile, Keystone
Indicazioni su pixel difettosi
Tempo di acquisizione, dati per le immagini
validate.
Tempo di acquisizione, dati per le immagini pre e
post validate
Level 1
Radianza al sensore
Iperspettrale
PAN
Maschera per la
classificazione generale
Maschera per le nubi
Iperspettrale
PAN
Iperspettrale
PAN
Iperspettrale
PAN
Iperspettrale
PAN
Maschera per il sun glint
Level 2b
Radianza a terra
Level 2c
Riflettanza a terra
Iperspettrale
PAN
Caratterizzazione degli aerosol
Vapor d’acqua
Caratterizzazione delle nuvole
Level 2d
Level 3a
Level 3b
Level 4
Iperspettrale
PAN
Parametri
geofisici/geochimici/biofisici/
biochimici
Radianza al sensore: viene applicata la
correzione radiometrica, vengono forniti i
parametri per la geo-localizzazione
Pixels nuvolosi e non
Pixels affetti da Sun glint
Radianza a terra, rimozione edgli effetti
atmosferici, parametri per la geo-locazione; dati
per la co-registrazione verificati; i parametri per
la geo-registrazione vengono forniti ma non
applicati
Riflettanaz a terra, vengono forniti i parametri
per la geo-locazione; i dati per la co-registrazione
sono verificati; i parametri per la georegistrazione vengono forniti ma non applicati
AOT, coefficienti di Angstrom. Vengono forniti
i parametri per la geo-locazione; i dati per la coregistrazione sono verificati; i parametri per la
geo-registrazione vengono forniti ma non
applicati
Vapor d’acqua. Vengono forniti i parametri per
la geo-locazione; i dati per la co-registrazione
sono verificati; i parametri per la georegistrazione vengono forniti ma non applicati
Profondità ottica delle nuvole, Vengono forniti i
parametri per la geo-locazione; i dati per la coregistrazione sono verificati; i parametri per la
geo-registrazione vengono forniti ma non
applicati
Geo-localizzazione dei prodotti 2c
Mappa della copertura del terreno dei parametri
geofisici/geochimici/biofisici/biochimici, derivati
dai dati dei prodotti di livello 3c. Vengono forniti
i parametri per la geo-locazione; i dati per la coregistrazione sono verificati; i parametri per la
geo-registrazione vengono forniti ma non
applicati
Geocodifica dei prodotti di livello 3°
Informazioni provenienti dal post-processing dei
prodotti di livello 3, ad esempio calcoli dei trend
di alcuni parametri
geofisici/geochimici/biofisici/biochimici
Info
Tab. 6-1: Sommario dei prodotti derivati dalla missione JHM
6.1.1 STRUTTURA DEI FILE
Ogni prodotto dal livello 0b al livello 2d conterrà un Main Metadata File e se richiesti
Optional Metadata Files oltre al Product Data File.
Il Main Metadata File conterrà informazioni sul product dataset e sui file ausiliari ed
ancillari e dovrebbe essere leggibile dall’utente, per permetterne una rapida ispezione, e
strutturato, per permetterne un facile post-processing.
Il Main Metadata File dovranno contenere almeno i seguenti gruppi di informazione:
73
• Date Info
• Product Info
• Satellite/Geometry Info
• Image Info
• Quality Info
• Calibration Products Info
• Ancillary Files Info
• Auxiliary Files Info
I file, usati nel processing e riferiti nel Main Metadata File, dovranno avere un nome che
segua una convenzione in modo da facilitarne il riconoscimento. Tale convenzione dovrebbe
includere almeno:
• Nome convenzionale secondo il tipo di file
• Data di creazione del file
• Data di inizio della validità
• Data di fine della validità
Tutte le informazioni, rilevanti per il processamento del prodotto dal livello 0b fino al
livello generato, saranno mantenute nel Main Metadata File così come i riferimenti ai file
utilizzati. Ciò permetterà la tracciabilità di tutte le operazioni eseguite per generare il prodotto
richiesto.
La struttura del Main Metadata File dovrebbe essere fissa per permettere di riportare ogni
informazione utile per ogni livello di prodotto e tipo e per puntare ai file ausiliari / ancillari
relativi ad ogni livello di processamento.
Tutte le volte che un’informazione, inclusa nella struttura del Main Metadata File, non
risulterà pertinente per un certo prodotto, verrà indicata come N/A.
Come specificato dal Product Layers Flags Set nel gruppo Product Info del Main Metadata
File, il Product Data File conterrà i seguenti datasets, i cui contenuti saranno dettagliati in
seguito:
• Image dataset (tutti i livelli di prodotto)
• Quality Mask (tutti i livelli di prodotto)
• Cloud Mask
• Sun Glint Mask
• General Classification Mask
• Geolocation Mask
6.1.2 HIERARCHICAL DATA FORMAT VERSIONE 5
Dello Hierarchical Data Format (HDF), sviluppato inizialmente dal National Centre for
Supercomputing Applications (NCSA) dell’Università dell’Illinois, supportato e distribuito
gratuitamente, la versione 5-1.8.8 è ad oggi la più recente. HDF5 è in grado di assicurare le
più alte adattabilità, portabilità e generalità di grosse moli di dati verso i sistemi di calcolo, i
programmi e le librerie utilizzati dagli sviluppatori di applicazioni e dagli utenti finali.
I file HDF5 sono organizzati in una struttura gerarchica, con due strutture principali: i
gruppi ed i datasets. Ogni gruppo o dataset può avere una lista di attributi associati. Un
attributo è una struttura definite dall’utente fornisce informazioni aggiuntive su un oggetto
HDF5.
L’organizzazione gerarchica del HDF5 è riportata in Fig. 6.2.
74
GROUP
Header
Attributes
Name
Datatype
Dataspace
Data
DATASET
Header
Name
Datatype
Dataspace
Storage layout
Attributes
Name
Datatype
Dataspace
DATA
ARRAY
Data
Fig. 6.2: Organizzazione dell’Hierarchical Data Format versione 5
Group
Un group HDF5 è una struttura contenente zero o più oggetti HDF5. Un gruppo è
composto da due parti:
• un group header: contiene il nome del gruppo e la lista degli attributi del gruppo.
• un group symbol table: contiene la lista degli oggetti HDF5 che appartengono al
gruppo.
Dataset
Un dataset è un array multidimensionale di elementi di dati, insieme al metadata di
supporto.
Un dataset è immagazzinato in un file in due parti:
• un dataset header: contiene informazioni necessarie ad interpretare la porzione di
array del dataset così come il metadata (o i puntatori al metadata) che descrive o
annota il dataset. Le informazioni dell’header includono il nome dell’oggetto, le
dimensioni, il tipo, dove sono immagazzinati i dati su disco ed altre informazioni
utilizzate per velocizzare l’accesso al dataset o mantenere l’integrità del file.
In ogni header esistono quattro classi essenziali:
• Name
• Datatype
• Dataspace
• Storage layout
• un data array.
Attributes
75
Gli attributes sono piccoli named datasets che possono essere aggiunti ad una delle
seguenti strutture:
• primary datasets
• groups
• named datatypes
Gli attributes possono essere utilizzati per descrivere la natura e/o l’utilizzo previsto di un
dataset o group.
Un attribute è compost da due parti:
• nome
• valore
Il valore contiene uno o più data entries dello stesso datatype.
Quando si accede agli attributes, essi possono essere identificati dal nome o da un index
value. L’uso di un index value rende possibile iterare attraverso tutti gli attributes associati ad
un dato oggetto.
CORREZIONE ED INTEGRAZIONE DATI
Il processore dello strumento PRISMA è costituito da un insieme di procedure applicate
sequenzialmente ai dati grezzi acquisiti per ottenere i valori di radianza al sensore (entrante
nella pupilla d’ingresso dello strumento) il tutto con l’ausilio dei KDP (Key Data Parameters),
aggiornati attraverso le calibrazioni a terra ed in volo, i dati ancillari descriventi le condizioni
operative della missione ed i parametri di volo.
Ai dati di radianza al sensore vengono applicate le correzioni atmosferiche implementate
da OHB-CGS come ripotato in figura per ottenere i prodotti di livello 2c tra cui le mappe di
riflettanza a terra. Per ottenere le altre mappe sono state scelte 14 bande spettrali della camera
iperspettrale e precisamente quelle centrate su:
AEROSOL
Lunghezza d’onda centrale
delle bande utilizzate
417 nm
495 nm
680 nm
780 nm
871 nm
1045 nm
1245 nm
1625 nm
2141 nm
VAPOR D’ACQUA
Lunghezza d’onda centrale
delle bande utilizzate
871 nm
915 nm
935 nm
946 nm
976 nm
1045 nm
1126 nm
1245 nm
Inoltre la procedura implementata passa attraverso l’utilizzo di Look-Up Table (LUT)
preconfezionate ed il calcolo della riflettanza al sensore in cui:
·
cos ·
dove:
:
:
:
radianza spettrale solare alla sommità dell’atmosfera
angolo zenitale solare
irradianza spettrale solare alla sommità dell’atmosfera
76
Fig. 6.3: Procedura sviluppata da OHB-CGS per le correzioni atmosferiche comprensive
dell’abbondanza colonnare di O3, CO2, O2, CH4 NO2 e N2O applicate ai dati L1 per ottenere mappe
L2c tra cui Cloud Optical Thickness (COT) e Aerosol Optical Depth (AOD).
Lo schema generale della procedura sviluppata dal Progetto OPTIMA per la correzione dei
dati acquisiti dalla missione PRISMA è riportato nella figura seguente.
Come si può notare questa procedura differisce sostanzialmente da quella implementata da
OHB-CGS in quanto evita di passare per il termine di riflettanza alla sommità dell’atmosfera
e non ricorre all’utilizzo di LUT (Look Up Tables), basandosi sull’impiego diretto di un
modello di trasferimento radiativo, basato sul programma MODTRAN 5.2 e reso possibile
dalle notevoli potenze di calcolo dei calcolatori oggi disponibili.
77
Fig. 6.4: Procedura generale di correzione dati sviluppata dal progetto OPTIMA.
78
6.1.3 GEOLOCALIZZAZIONE E GEOCODIFICA
I prodotti geolocati di PRISMA includeranno informazioni sulla localizzazione geografica
dei pixel (per ogni pixel i valori di latitudine, longitudine e quota del centro del pixel sono
riportati nella Geolocation Mask nel Product Data File, in layers dedicati) ma non saranno
eseguiti né trasformazioni né ricampionamenti.
L’immagine viene detta geolocata quando ad ogni pixel viene fatto corrispondere una
coppia di coordinate geografiche (tipicamente latitudine e longitudine). La corrispondenza tra
la coppia di coordinate geografiche e l’effettivo punto al suolo è definita dalla scelta di un
datum (modello di ellissoide di riferimento, per esempio: WGS84). Per stabilire la relazione
che associa le coordinate ,
del pixel dell’immagine con la coppia di coordinate
geografiche (latitudine, longitudine) è necessaria la conoscenza degli opportuni parametri che
descrivono tale relazione (mapping). Una scelta dei suddetti parametri è, ad esempio data
dalla posizione del satellite (coordinate geografiche del punto al nadir, quota del satellite) e
dalla direzione di puntamento del centro della scena (oppure un qualsiasi altro insieme
equivalente di variabili descrittive dell’orbita e della posizione di vista).
Un’opportuna trasformazione (espressa solitamente in forma matriciale) lega quindi le
coordinate , del generico pixel dell’immagine con la coppia
, ,
,
per il
datum fissato. L’immagine può, a questo punto, essere rappresentata (proiettata) utilizzando
un’opportuna trasformazione (proiezione cartografica) che passi dal piano , al piano
,
,
,
verso il quale la proiezione ha luogo. Ciò renderà possibile la
geocodificata dell’immagine.
79
6.2 PRODOTTO DI LIVELLO 1 - RADIANZA AL
SENSORE
La calibrazione radiometrica invece serve convertire la risposta del sensore (il segnale
digitalizzato del convertitore) in unità fisiche assolute ossia nel valore di radianza al sensore.
Ciò comporta che siano determinati i valori della corrente di buio del sensore insieme ai
coefficienti di guadagno per ogni elemento fotosensibile che compone il sensore utilizzato.
Ciascun elemento fotosensibile del rivelatore a matrice presenta un guadagno (o
sensibilità) S ( x, ) ed un segnale di buio g0 ( x, ) , quindi il valore g ( x, y, ) misurato dal
sensore espresso in digital number) risulta essere:
g ( x, y, ) I ( x, y, ) * H ( )S ( x, ) g 0 ( x, )
Eq. 6-1
dove I ( x, y, ) è la radianza che illumina la fenditura d’ingresso dello spettrometro e
Lmis ( x, y, ) I ( x, y, ) * H ( ) è la radianza che arriva sul piano d’uscita dello spettrometro
ed illumina il rivelatore.
Abbiamo già detto che il guadagno (o sensibilità), variando da un pixel all’altro del
rivelatore, produce nei sistemi push-broom un modello di rumore coerente spazialmente (a
barre che seguono la direzione di volo) e spettralmente.
6.2.1 CALIBRAZIONE DELLA CORRENTE DI BUIO
Per determinare il termine g 0 ( x, ) di (6-1), in laboratorio si devono eseguire misure
ripetute nel tempo del segnale di buio cioè in assenza di illuminazione, in modo da poter
calcolare la sua statistica (varianza e valore di aspettazione) indipendentemente per ogni pixel
del sensore.
Durante il sorvolo è consigliabile eseguire almeno una misura di buio mantenendo chiusa
la botola dell’aereo (nelle stesse condizioni operative di guadagno, otturatore e tempo di
integrazione) e acquisendo un numero di righe di scansione sufficiente a stimare i momenti
statistici di I e II ordine con una precisione compatibile con il numero di bit del sensore.
6.2.2 CALIBRAZIONE DEL SENSORE A MATRICE (FLATFIELD)
Dopo questa operazione occorre misurare e quindi correggere le variazioni locali di
sensibilità S ( x, ) dei singoli elementi fotosensibili del sensore a matrice. L’operazione è
resa complessa essenzialmente per due aspetti:
1. la difficoltà di reperire un riflettore standard da laboratorio che soddisfi i seguenti
requisiti:
a) riflettività nota e spazialmente omogenea;
b) riflettività spettralmente costante (per motivi di equalizzazione del segnale è
opportuno che lo stesso non presenti variazioni spettrali di grande ampiezza che
comporterebbero una peggiore accuratezza di digitalizzazione alle lunghezze d’onda
corrispondenti alle potenze minori);
c) isotropia della riflessione (riflettività di tipo lambertiano);
80
d) resistenza all’invecchiamento;
e) stabilità chimica;
f) materiale non igroscopico;
2. la difficoltà di reperire una sorgente di radianza nota spettralmente, omogenea
spazialmente e stabile temporalmente (su tutto l’intervallo spettrale esplorato) con
un’accuratezza migliore di quella di digitalizzazione del sensore (> 0,1% nel caso di una
conversione a 10 bit).
È prassi comune utilizzare come riflettore standard un pannello di SpectralonTM della
Labsphere Inc., costituito da polvere compressa di poli-tetra-fluoro-etilene (PTFE),
chimicamente inerte alla maggior parte dei composti basici e stabile termicamente fino a
temperature di 350 oC. Le caratteristiche dello SpectralonTM sono riportate in Tab. 6-2.
Intervallo spettrale:
Riflettanza:
Stabilità termica:
Limite di danneggiamento da laser:
Densità:
Permeabilità all’acqua:
Robustezza:
Coefficiente di espansione lineare:
0.2 – 2.5 µm
98 – 99 %
fino a 350 °C
> 8.0 Jm-2
1.25 – 1.5 gcm-3
< 0.001%
20 – 30 Shore D
(5.5 – 6.5) x 10-4 °C-1
Tab. 6-2: Caratteristiche dello SpectralonTM
.
Uno strato di solfato di bario (BaSO4) viene talvolta depositato sulla superficie dello
SpectralonTM, al fine di ottenere una migliore uniformità spettrale della riflettanza (fino a
lunghezza d’onda di 2.5 µm).
Una sorgente con questi requisiti può essere ottenuta con una sfera integratrice ed una
sorgente primaria di irradianza, costituita da una o più lampade a incandescenza (alogene) la
cui alimentazione sia controllata almeno in potenza. L’apertura d’uscita della sfera
integratrice dovrà essere sufficientemente larga da poter illuminare uniformemente l’ottica di
ingresso dello spettrometro. La radiazione emessa dalla lampada viene infatti raccolta dalla
sfera integratrice e attraverso riflessioni multiple e processi di diffusione sulle pareti interne si
viene a creare una distribuzione di campo uniforme. L’area della fessura di uscita della sfera
integratrice si comporta pertanto come una sorgente secondaria Lambertiana caratterizzata da
una radianza che è costante sul piano dell’apertura della sfera e indipendente dall’angolo di
vista.
Usando i valori di calibrazione radiometrica della sfera integratrice si può poi ricavare i
valori dei coefficienti S ( x, ) di guadagno dividendo i valori di radianza noti per i digital
number indicati dal sensore.
Usando lo stesso apparato sperimentale si verificherà poi che la grandezza S ( x, ) sia
anche indipendente dalla radianza incidente sul sensore, cioè dall’ampiezza del segnale
rilevato. Infatti la sfera integratrice ha la possibilità di variare in maniera controllata la
radianza emessa dall’apertura e di verificare così anche la calibrazione della linearità della
risposta radiometrica del segnale.
Tuttavia questa procedura richiede sfere integratrici grandi, con diametri dell’ordine dei
500 mm e dotate di più sorgenti, quindi richiede un investimento notevole sia in termini di
spazi che economici.
Un sistema che viene comunemente fornito dalle ditte produttrici di spettrometri ad
immagine per aereo è costituito da un banco di calibrazione. Tale banco comprende una
lampada alogena posta in un contenitore a pareti bianche e che illumina una apertura di vetro
smerigliato approssimabile ad un diffusore lambertiano. L’ottica d’ingresso del sensore viene
accoppiata al vetro smerigliato per effettuare le misure di calibrazione.
81
Nel caso in cui non si disponga di nessuno delle componenti sopra-descritte si può
ricorrere ad una procedura “vicaria” come quella descritta di seguito e che è stata da noi
adottata per la calibrazione della risposta del VIRS-200.
Innanzitutto bisogna determinare quei profili c( x, ) che dipendono solamente dalla
coordinata “across-track” x con i quali viene rimosso ogni effetto introdotto dalla variazione
spaziale della sensibilità del rivelatore. Questi profili possono essere determinati in due modi:
(a) utilizzando direttamente le immagini acquisite secondo la procedura descritta nei
capitoli precedenti;
(b) sostituendo la sfera integratrice con una coppia di diffusori piani. Idealmente il primo
diffusore produce un’illuminazione omogenea sulla superficie del secondo che tuttavia
riceverà un campo di radiazione non isotropa. Il secondo diffusore quindi uniforma la
radiazione incidente fra le diverse direzioni di propagazione ed il sistema tende a
comportarsi con buona approssimazione come una sorgente estesa, uniforme e
isotropa. In realtà i diffusori sono caratterizzati da una funzione di fase che decresce
rapidamente per angoli maggiori di una certa soglia della FWHM (angolare) della
funzione di fase non nota a priori. L’uniformità della illuminazione sul piano del
secondo diffusore sarà ottenuta imponendo che la distanza h tra i due diffusori sia tale
che:
h tan
2
d
Eq. 6-2
2
essendo d la dimensione di ciascun diffusore. Questo sistema si comporterà pertanto come
una sorgente estesa che emette un campo di radiazione praticamente costante entro un angolo
. Nel nostro esperimento sono stati utilizzati due diffusori piani (opalini) di dimensioni 30
cm x 15 cm, posti ad una distanza mutua di 20 cm ed illuminati con una lampada alogena
(600 W), riflessa da un pannello di Teflon.
La risposta del sensore g~( x, y, ) , corretta per il segnale medio di buio e per il rumore
spazialmente coerente (livello 1A), sarà adesso proporzionale alla radianza al sensore secondo
un fattore di scala che dipende solamente dal canale considerato:
g~( x, y, )
g ( x, y , ) g 0 ( x, )
c( x , )
~
Lmis ( x, y, ) S ( )
Eq. 6-3
6.2.3 CONVERSIONE IN UNITÀ DI RADIANZA
L’idea di base della calibrazione radiometrica vicaria è quella di simulare lo spettro di
radianza al sensore Ltheo ( x, y, ) con il MODTRAN 5 e di confrontarlo con quello misurato
~
Lmis ( x, y, ) in un pixel noto al fine di estrarre i coefficienti S ( ) .
Per simulare la radianza al sensore si sfruttano le misure effettuate a terra, in particolare si
utilizza lo spettro di riflettanza misurato sul sito di calibrazione con uno spettrometro
sufficientemente preciso. La Fig. 6.5 riproduce un esempio di spettro acquisito in campo con
uno spettrometro GER Mark V.
82
1
Riflettanza
0.8
0.6
0.4
0.2
0
400
600
800 1000 1200 1400 1600 1800 2000 2200 2400
Lunghezza d'onda (nm)
Fig. 6.5: Spettri di riflettanza misurati in laboratorio su un campione di sabbia prelevato in
prossimità della foce del Morto Nuovo all’interno della Tenuta di San Rossore (Pisa), scelto
come sito di calibrazione, in occasione della campagna di telerilevamento di giugno 2000
Un simile spettro di riflettanza può essere dato come parametro di ingresso al programma
MODTRAN 5, insieme a quelli che definiscono la configurazione di acquisizione del sensore
della radianza riflessa dal sito di calibrazione scelto (quota sensore, giorno e data, angolo
zenitale e azimutale di vista corrispondente al pixel della scena osservata, modello di aerosol,
concentrazione colonnare di CO2 e H2O, ecc..).
Quindi si effettua una media di g~( x, y, ) nell’intorno del sito di calibrazione (variabile da
5x5 pixels fino a 50x50 pixels), canale spettrale per canale spettrale, e dividendo per il valore
~
di Ltheo ( x, y, ) si stima il valore teorico del coefficiente Stheo ( ) di guadagno per le bande
selezionate.
g~( x, y, ) 5 x 5
Ltheo ( x, y, )
~
Stheo ( )
Eq. 6-4
A questo punto il rapporto tra la risposta del sensore g~( x, y, ) e il coefficiente di
~
guadagno stimato Stheo ( ) produce l’immagine radiometricamente corretta ossia il valore di
radianza al sensore Lmis ( x, y, ) (livello 1B).
g~( x, y, )
~
Stheo ( )
Lmis ( x, y, )
Eq. 6-5
La procedura qui descritta viene applicata prima alle immagini contenenti i siti di
calibrazione in modo da verificare per le condizioni operative del sensore l’immagine di
guadagno acquisita in laboratorio. Mentre l’immagine di buio acquisita in laboratorio viene
83
verificata almeno una volta sia all’inizio che alla fine dei sorvoli. Questo permette quindi di
valutare la stabilità della risposta del sensore e di mitigare l’esigenza di dover disporre per
ciascuna scena acquisita di una misura di calibrazione in-situ.
6.2.3.1 TEST DELLE PROCEDURE CNR-IFAC DI CORREZIONE
RADIOMETRICA SU IMMAGINI HYPERION
Gli algoritmi e le procedure già esistenti di correzione radiometrica sono stati testati su
immagini acquisite dal sensore Hyperion, montato sul satellite EO-1, data la somiglianza delle
sue caratteristiche con quelle della camera iperspettrale di PRISMA. In particolare sono state
corrette radiometricamente le seguenti acquisizioni:
Acquisizioni sulla città di Firenze il 19 dicembre 2002 ed il 14 luglio 2010
Acquisizione sul Parco di San Rossore il 10 agosto 2012
Acquisizione su Venezia il 7 giugno 2001
Acquisizioni fatte in Umbria su Collazzone il 25 marzo 2010
Acquisizioni fatte sul promontorio dell’Argentario il 12 luglio 2002, il 14 settembre 2002,
ed il 10 luglio 2007.
Le immagini di radianza al sensore sono state ottenute utilizzando delle procedure di
calibrazione radiometrica standard, tenendo conto delle principali caratteristiche
radiometriche di Hyperion.
Come esempio in Fig. 6.6 vengono riportati i grafici relativi agli spettri di radianza al
sensore per alcuni pixel caratteristici estratti dalle immagini acquisite su Firenze il 19
dicembre 2002 e corrette radiometricamente.
4
At sensor Radiance (microW cm‐2 sr‐1 nm‐1)
3.5
3
2.5
Grass II pt.
Roof
2
Arno river
Gras I pt.
1.5
Airport
1
0.5
0
400
600
800
1000
1200
1400
1600
Wavelength (nm)
1800
2000
2200
2400
a
b
Fig. 6.6 Spettri di radianza per alcuni pixel a terra (tetti, erba, fiume Arno, pista dell’aeroporto)
dell’acquisizione su Firenze
84
6.2.3.2 MIGLIORAMENTO PROCEDURE CNR-IFAC DI CORREZIONE
RADIOMETRICA
Per completare realisticamnte il processo di simulazione delle immagini, è stato impiegato
il programma di “de-striping” sviluppato da IFAC-CNR per estrarre dei profili realistici da
immagini iperspettrali reali. Durante questo processo è stata ottimizzata la procedura in nostro
possesso, introducendo dei fattori di normalizzazzione in lunghezza d’onda.
85
6.3 PRODOTTO DI LIVELLO 2c - RIFLETTANZA A
TERRA
Per estrarre i parametri fisici delle superfici osservate, in primo luogo la riflettanza, occorre
correggere i dati telerilevati, tenendo conto che la radianza misurata dallo strumento ha
attraversato l’atmosfera, subendo assorbimenti e diffusioni dovuti alla presenza di elementi
quali gas e particolato, ed ha interagito con il suolo. A tal fine è necessario considerare un
modello di propagazione della radiazione nell’atmosfera, che tenga conto dei possibili
contributi radiativi alla radianza misurata dal sensore come indicato in modo schematico in
Fig. 6.7.
LAS event
Ldown-welling
Lpath
sensor
IFOV
Ldirect
trapping event
SAS event
Ladjacent
background
(a)
pixel
background
(b)
Fig. 6.7: Schematizzazione della propagazione della radianza in atmosfera e della sua interazione
con il suolo che evidenziano (a) il numero totale di componenti radiative e (b) le componenti prese in
considerazione.
Come si evince dalla Fig. 6.7 (a) i vari contributi possono essere schematizzati come:
1. componente non riflessa dal suolo diffusa da elementi sia fuori che dentro il campo di
vista del sensore;
2. componente non riflessa dal suolo diffusa da elementi solo dentro il campo di vista del
sensore;
3. componente riflessa dal suolo direttamente trasmessa senza diffusioni;
4. componente riflessa dal suolo diffusa da elementi solo dentro il campo di vista del
sensore;
5. componente riflessa dal suolo diffusa da elementi sia fuori che dentro il campo di vista
del sensore;
6. componente riflessa dal suolo diffusa da elementi solo fuori il campo di vista del
sensore;
7. componente dovuta al contributo dei pixel vicini per diffusione da elementi nel campo
di vista del sensore;
8. componente dovuta al contributo dei pixel vicini sull’illuminazione del pixel
osservato.
86
Riguardo il tipo di scattering che influisce la radianza totale Lobs misurata da un sensore,
questa può essere pensata come la somma di L1 , L2 , Ldirect , Ladjacent . Per spiegare meglio il
modello di 6.9 (b) dividiamo il fenomeno dello scattering in due classi: lo scattering ad angolo
grande (“large angle scattering”, LAS) e quello ad angolo piccolo (“small angle scattering”,
SAS). L’evento LAS viene generato quando il fotone collide con molecole (scattering di
Rayleigh) e piccole particelle di aerosol, mentre l’evento SAS tiene conto degli effetti di
scattering dovuti a particelle di aerosol grandi. La dimensione angolare di confronto è il
campo di vista del sistema ad immagine che stiamo considerando.
Come rappresentato in Fig. 6.7, la radiazione solare viene parzialmente assorbita e diffusa,
così come la superficie terrestre viene irradiata dal Sole sia direttamente sia per diffusione che
avviene sul percorso Sole-suolo. Quindi la superficie osservata origina un campo riflesso il
quale, a sua volta, viene assorbito e diffuso sul percorso suolo-sensore. A questo contributo al
segnale misurato dal sensore si aggiunge la radiazione diffusa dall’atmosfera proveniente sia
dal Sole che da altri punti della superficie terrestre. Su entrambi i percorsi la radiazione
subisce fenomeni di scattering e di assorbimento. Sul primo percorso la radianza che
raggiunge il suolo può essere suddivisa in due contributi: l’irradianza solare direttamente
trasmessa al suolo E dir e la radianza L1 diffusa dall’atmosfera attraverso eventi LAS
direttamente nel campo di vista dello strumento. Nel secondo percorso possiamo distinguere
tre contributi essenziali: L2 , Ldirect , Ladjacent .
L2 è la radianza sottratta alla radianza riflessa dal suolo che raggiunge il sensore attraverso
uno o più eventi LAS, e contiene la radianza dovuta gli effetti di trapping Ltrapping ed una
parte degli effetti di adiacenza, come indicato in Fig. 6.7.
Ldirect è la radianza riflessa dal suolo e direttamente trasmessa al sensore.
Ladjacent è la radianza dovuta ai fenomeni di adiacenza (o di “cross-talk”) indotti da eventi
SAS che risulta fortemente influenzata dalla tessitura della scena (valore di riflettanza e sua
distribuzione spaziale). L1 e L2 sono pertanto contributi radiativi al segnale misurato indotti
da eventi LAS e sono indicati con il termine L path .
È da notare che:
(a) L1 L2 poiché il livello di radianza L2 si viene ridotto prima per effetto della
riflettanza del suolo e poi per la maggiore distanza percorsa in atmosfera;
(b) Ladjacent è essenzialmente prodotta nel secondo percorso poiché nel tratto Sole-suolo
un evento SAS produce solamente una ridistribuzione angolare dell’energia (
Ldown welling in Fig. 6.7 (b)) che non altera né l’irradianza diretta E
dir
(che illumina il
suolo) né il livello di radianza Ldirect direttamente trasmesso al sensore.
Lobs Ldirect Ladjacent L path
87
Eq. 6-6
6.3.1 METODOLOGIA SVILUPPATA DAL CNR-IFAC
Abbiamo visto nei capitoli precedenti che per ricavare dalla radianza misurata da uno
spettrometro lo spettro di riflettanza della superficie lambertiana osservata possiamo utilizzare
l’Eq. 6-37 che qui di sotto riportiamo. Tuttavia questa espressione non tiene conto né degli
effetti di adiacenza né di quelli di “trapping”.
( )
Lobs ( , ) L path ( , )
a ( )
TOA
s ( )
sca
( ) cos exp
E ( , ) exp
E
Eq. 6-7
Qui di seguito viene descritta la metodologia sviluppata presso il CNR-IFAC al fine di
considerare i contributi radiativi dovuti agli effetti di adiacenza (dovuti essenzialmente a
eventi di tipo SAS).
6.3.1.1 METODO DI STIMA DEL CONTRIBUTO DEI PIXEL VICINI
Per fare questo una nuova soluzione alla RTE è stata trovata utilizzando il cosiddetto
metodo degli “ordini successivi”.
In altre parole la radianza-al-sensore L( , z; , ) riflessa dal suolo nella direzione di vista
( , ) viene schematizzata come la somma di una componente radiativa L(0) (, z; , )
(1)
direttamente trasmessa al sensore e di una componente radiativa L (, z;, ) diffusa verso
il sensore in seguito ad un solo evento di scattering (evento SAS):
L(, z;, ) L(0) (, z, , ) L(1) (, z, , )
Eq. 6-8
Queste due componenti radiative soddisfano la RTE:
dL( 0 ) ( , z; , ) ext L( 0 ) ( , z; , )
dz
cos
(1)
ext L ( , z; , ) sca ( , z; ' , ' , ) L( 0 ) ( , z; ' , ' )d( ' , ' )
dL(1) ( , z; , )
4
dz
cos
Eq. 6-9
Le condizioni al contorno di Eq. 6-9 sono:
( 0)
L ( , z 0; , )
(1)
L ( , z 0; , )
( ) E ( )
Eq. 6-10
0
La prima equazione del sistema di Eq. 6-9 ammette una soluzione tipo Beer:
88
z
(
)
d
ext
(
)
E
(
)
( ) E ( )
L( 0) ( , z; , )
exp 0
exp ( , z ) sec Eq. 6-11
cos
Per trovare una soluzione alla seconda equazione del sistema Eq. 6-9 occorre fare alcune
approssimazioni:
-
( 0)
la componente radiativa L (, z; , ) che compare nella funzione sorgente viene
(0)
sostuita con il suo valore al suolo L (, z 0; , ) ;
-
(1)
ad una certa quota z si considera per il calcolo di L (, z;, ) solo il flusso della
semisfera inferiore;
la scattering dominante è di tipo Rayleigh con funzione di fase normalizzata all’unità;
il coefficiente di scattering è stato assunto come una funzione separabile delle variabili
z
sca ( , )
lunghezza d’onda e spaziale in modo tale che
d sca ( ) f ( z , )
0
cos
J ( , z ; , )
0 ( , z ) ( , z; ' , ' , ) L( 0) ( , z; ' , ' )d( ' , ' )
4
0 ( , z ) ( , z; ' , ' , ) L( 0) ( , z 0; ' , ' )d( ' , ' )
4
( ) E ( )
Eq. 6-12
2 / 2
0 ( , z )
0
( , z ; ,
'
'
'
'
, )d( , )
0
( ) E ( ) 0 ( , z )
2
Inoltre l’integrale spaziale (della variabile quota) lungo la direzione di vista viene risolto
estraendo il termine di attenuazione esponenziale con un valore medio come indicato in Eq.
6-13:
( , z ) ( , ) ( , ) d
ext
(
,
;
,
)
exp
J
0
cos
cos
z
( ) E ( )
sca ( , )
exp ( , z ) sec
d
0 2 cos
( ) E ( )
sca ( )
exp ( , z ) sec
f ( z, )
2
L(1) ( , z; , )
z
89
Eq. 6-13
Generalizzando al caso in cui i fotoni subiscano più di un evento di scattering lungo la
direzione di vista del sensore, si può utilizzare la seguente espressione per il contributo alla
radianza dovuto agli effetti di adiacenza:
(1)
L ( , z; , )
( ) E ( )
( ) A( z, ) 1
exp
( ) 2
Eq. 6-14
In conclusione la riflettanza obbedisce alla seguente espressione:
( )
Lobs ( , ) L path ( , )
TOA
( )
E sca ( , ) exp s ( ) A( z , ) exp ( )
E ( ) cos exp a
( )
2
Eq. 6-15
Al fine di stimare i coefficienti A( z, ) , e ( ) abbiamo sviluppato un algoritmo che
minimizza la funzione di costo E definita in Eq. 6-16:
E
k
2
(k )
1
Eq. 6-16
(k )
dove la somma è eseguita sul numero di misure disponibili (campioni spettrali) e
rappresenta uno spettro di riflettanza mediata su un numero di campioni spettrali.
k / 2
( )d
( k )
Eq. 6-17
k / 2
6.3.1.2 METODO ITERATIVO
ATMOSFERICI
DI
STIMA
DEI
PARAMETRI
Una volta definito il modello fisico abbiamo messo a punto un metodo “autonomo” che
stima la riflettanza della superficie osservata generando in modo automatico il file *tp5 del
MODTRAN 5 con cui i diversi contributi radiativi di Eq. 6-15 vengono simulati. Attraverso
un processo di tipo iterativo il metodo autonomo stima i valori della concentrazione di H2O,
CO2 (per gli effetti di assorbimento atmosferico) e di visibilità (per gli effetti di diffusione (a
90
lenta variazione spettrale) dovuti agli aerosol e alle molecole (diffusione di tipo Mie e
Rayleigh), considerati parametri liberi, che soddisfano i seguenti vincoli:
- lo spettro di riflettanza stimato mostra una lenta variazione in lunghezza d’onda
ovvero non contiene bande residue di assorbimento atmosferico (O2, H2O, CO2, O3)
tranne in quelle lunghezze d’onda dove lo spessore ottico atmosferico è molto
maggiore rispetto all’unità;
- lo scarto tra lo spettro simulato di irradianza solare e quello teorico (ad es.: misurato
in-situ) è sufficientemente piccolo;
- lo scarto tra lo spettro teorico di riflettanza relativo ad un determinato pixel
dell’immagine (spettro di verità) e quello stimato è sufficientemente piccolo.
Classe
Depositi
1
alluvionali 1
2
Depositi
alluvionali 2
3 Argille azzurre
4 Lenti sabbie
5
Vegetazione su
argille
6
Vegetazione su
alluvionali 2
End-members
Limo sabbioso
Erba verde
Suolo sabbioso-ciottoloso
Calcite
Illite
Caolinite
Montmorillonite
Suolo argilloso
Calcite
Illite
Caolinite
Montmorillonite
Sabbie
Erba verde
Suolo argilloso
Calcite
Illite
Caolinite
Montmorillonite
Erba verde
Suolo sabbioso-ciottoloso
Calicte
Illite
Caolinite
Montmorillonite
Abbondanza
0.8
0.2
0.4
0.1
0.1
0.2
0.2
0.2
0.1
0.2
0.2
0.3
1.0
0.1
0.3
0.1
0.1
0.2
0.2
0.1
0.3
0.1
0.1
0.2
0.2
Tab. 6-3: diverse tipologie di suoli.
91
Libreria
JHU_Soils
USGS_Veg
JHU_Soils
USGS_Min
USGS_Min
USGS_Min
USGS_Min
JHU_Soils
USGS_Min
USGS_Min
USGS_Min
USGS_Min
JHU_Soils
USGS_Veg
JHU_Soils
USGS_Min
USGS_Min
USGS_Min
USGS_Min
USGS_Veg
JHU_Soils
USGS_Min
USGS_Min
USGS_Min
USGS_Min
(a)
(b)
Fig. 6.8: (a) spettri di riflettanza degli end-members utilizzati per simulare l’immagine di
riflettanza di (b) le cui abbondanze sono indicate insieme alle classi nella nella
Tab. 6-3
Con la mappa di riflettanza di Fig. 6.8 (b) sono state simulate diverse immagini di radianzaal-sensore introducendo gli effetti atmosferici e alcune caratteristiche riguardanti la modalità
di funzionamento di uno spettrometro ad immagine (passo di campionamento e risoluzione
spettrale, SNR ecc..). Un esempio di immagine sintetica è mostrata in Fig. 6.8.
92
153 canale spettrale
Fig. 6.9: Immagine sintetica di radianza al sensore nel canale spettrale 153 centrato a 764.8 nm.
Le frecce indicano i pixel da cui sono stati estratti gli spettri corrispondenti
La Fig. 6.10 mostra l’andamento in funzione della lunghezza d’onda della radianza per 6
pixel dell’immagine di Fig. 6.9
.
atm_(1,256)
18000
atm_(121,18)
16000
atm_(45,60)
Radianza-al-sensore
(nW cm-2 sr-1 nm-1)
20000
14000
atm_(110,81)
12000
atm_(172,223)
10000
atm_(52,167)
8000
6000
4000
2000
0
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
Lunghezza d'onda (µm)
2.0
2.2
2.4
Fig. 6.10: Spettri di radianza-al-sensore estratti dall’immagine sintetica di Fig. 6.8. I numeri
della legenda indicano le coordinate dei pixel da cui sono stati estratti gli spettri.
Il metodo autonomo del CNR-IFAC può utilizzare come parametri d’ingresso lo spettro di
irradianza solare al suolo (che potrebbe essere misurato ad esempio durante una campagna di
93
telerilevamento) e lo spettro di riflettanza di almeno un punto della scena osservata. Con
questi parametri di ingresso il metodo autonomo ha corretto per gli effetti atmosferici
l’immagine sintetica di Fig. 6.8 generando il seguente file *tp5 per il MODTRAN 5.
MM
ff
MM
ff
2
2
2
1
8F
4 439.50223
1
0
1
4
1.500
0.000
1
2 256
0
43.730
349.700
399.
2500.
1
2
2
2
1
8F
4 439.50223
1
0
1
4
1.500
0.000
1
2 256
0
43.730
349.700
399.
2500.
3
1.500
0.000
1
2 256
0
43.730
349.700
3
1.500
0.000
1
2 256
0
43.730
349.700
0
0
0
0.949783
0
0
180.000
0
0
0
0
1.000000 F F F
24.11301
0.00000
0.000
0.000
0.000
1.
0
0
0.949783
0
0
179.993
0.000
11.333
1.RNDelimitaN
0
0
0
0
1.000000 F F F
24.11301
0.00000
0.000
0.000
0.000
1.
0.000
11.333
1.RNDelimitaN
0
0
0.000
0.00000
6371.230
0
0.000
1.00
0.00000
0
0.00000
0.000
90.000
0.000
0.000
A
0
0
0.000
0.00000
6371.230
0
0.000
0.000
6371.230
0.000
0.000
11.333
90.000
179.993
0.000
0.000
6371.230
0.000
0.000
11.333
90.000
0.00
0.00000
0
0.00000
0.000
0.000
0.000
270.000
A
180.000
0.000
0
0.000
0.000
0
0.000
0.000
0.000
0.000
Le variazioni dei valori dei parametri liberi di concentrazione di H2O, CO2 e visibilità
meteorologica sono riassunti in Tab. 6-4.
Scenario_suoli_argillosi_atm
H2O:
CO2:
VIS:
2.77 g cm-2
439.5 ppm
18.55 km
0.95
439.5
24.11
Tab. 6-4: Variazioni dei valori dei parametri liberi di concentrazione di H2O, CO2 e visibilità
meteorologica.
10000
atm_(1,256)
atm_(45,60)
atm_(172,223)
9000
Riflettanza (x 10000)
8000
atm_(121,18)
atm_(110,81)
atm_(52,167)
7000
6000
5000
4000
3000
2000
1000
0
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
Lunghezza d'onda (µm)
2.0
2.2
Fig. 6.11: Spettri di riflettanza in corrispondeza dei pixel indicati in Fig. 6.9.
94
2.4
In Fig. 6.12 lo spettro di riflettanza relativo al punto di coordinate (1,256) è confrontato con
quello teorico. Come si evince dal grafico l’errore relativo percentuale è in media minore del
10% tranne che alle lunghezze d’onda relative a forti bande di assorbimento atmosferico e nei
primi canali nel blu dovuto essenzialmente all’errore di stima della visibilità (che è legata al
coefficiente di estinzione dovuto agli aerosol).
9000
Riflettanza (x 10000)
100
atm_(1,256)
90
teorico_(1,256)
8000
80
errore relativo
7000
70
6000
60
5000
50
4000
40
3000
30
2000
20
1000
10
Errore relativo (%)
10000
0
0
0.4
0.6
0.8
1.0
1.2 1.4 1.6 1.8 2.0
Lunghezza d'onda (µm)
2.2
2.4
Fig. 6.12: Spettri di riflettanza in corrispondenza dei pixel indicati in Fig. 6.9..
6.3.1.2.1 PROCEDURE DI LETTURA E SCRITTURA DEL FILE DI INGRESSO DEL
MODTRAN 5.2
Per quanto riguarda la correzione degli effetti atmosferici in maniera iterativa è continuata
l’implementazione di procedure automatiche basate sulle uscite del programma di calcolo di
trasferimento radiativo MODTRAN 5.2.
In particolare sono state implementate nuove procedure di lettura e scrittura dei file di
ingresso e di uscita del programma Modtran5.2.
Per quanto riguarda la scrittura del file di input tape5 è stato sviluppato un softawre che
permette di gestire tutte le cards che generano il file .tp5 e di generare chiamate multiple. Allo
stesso tempo il software e’ in grado di leggere file di input generati precedentemente e di
modificarli in tutto o in parte.
Questo lavoro è stato propedeutico per la gestione delle procedure iterative necessarie per
effettuare correzioni atmosferiche autonome.
6.3.1.3 SUPERFICI NON LAMBERTIANE
Va ricordato che quanto descritto in precedenza, circa la modalità di correzione degli
effetti atmosferici sulle immagini telerilevate, è valido se l’atmosfera è otticamente sottile e le
superfici osservate sono lambertiane.
Purtroppo in molti casi ciò non è vero e per quanto riguarda le superfici osservate spesso
esse hanno direzioni preferenziali di riflessione della radiazione solare, in altre parole la
riflettenza misurata di tali superfici dipende non solo dalla loro natura e struttura ma anche
dall’intensità e posizione della sorgente di illuminazione e dalla posizione relativa
dell’osservatore.
95
Per una trattazione dettagliata di questa problematica si faccia riferimento al lavoro di
A.Barducci, D.Guzzi, P.Marcoionni, I.Pippi “Bidirectional Reflectance Distribution Function:
Theory, Measurements, and Results”, CNR-IFAC Report, April 2004.
6.3.1.4 TEST DELLE PROCEDURE CNR-IFAC DI CORREZIONE
ATMOSFERICA SU IMMAGINI HYPERION
Gli algoritmi e le procedure già esistenti di correzione atmosferica sono stati testati su
immagini acquisite dal sensore Hyperion, montato sul satellite EO-1, data la somiglianza delle
sue caratteristiche con quelle della camera iperspettrale di PRISMA. In particolare sono state
corrette atmosfericamente le seguenti acquisizioni:
Acquisizioni sulla città di Firenze il 19 dicembre 2002 ed il 14 luglio 2010
Acquisizione sul Parco di San Rossore il 10 agosto 2012
Acquisizione su Venezia il 7 giugno 2001
Acquisizioni fatte in Umbria su Collazzone il 25 marzo 2010
Acquisizioni fatte sul promontorio dell’Argentario il 12 luglio 2002, il 14 settembre 2002,
ed il 10 luglio 2007.
Le immagini di radianza al sensore sono state corrette per gli effetti atmosferici utilizzando
come parametri di ingresso, oltre ai parametri di acquisizione del sensore anche le grandezze
fisiche che caratterizzano l’atmosfera terrestre quali i profili di pressione, temperatura,
umidità, gli aerosol ed i principali componenti gassosi tipici per il momento ed il luogo in cui
sono state effettuate le acquisizioni.
Come esempio in Fig. 6.13 vengono riportati i grafici relativi agli spettri di riflettanza a
terra per alcuni pixel caratteristici estratti dalle immagini acquisite su Firenze nel dicembre
del 2002.
a
100
90
80
70
Refelctance (%)
Grass II pt.
60
Gras I pt.
Roof
50
Airport
40
Arno river
30
20
10
0
400
600
800
1000
1200
1400
1600
Wavelength (nm)
1800
2000
2200
2400
b
Fig. 6.13: Spettri di riflettanza al sensore (b) per alcuni pixel a terra (tetti, erba, fiume Arno,
pista dell’aeroporto) dell’acquisizione su Firenze
96
6.3.1.5 TEST DELLE PROCEDURE CNR-IFAC SU IMMAGINI PRISMA
SIMULATE
Gli algoritmi e le procedure già esistenti di correzione atmosferica sono stati infine testati
sul primo set di immagini “sintetiche”che simulano quelle che verranno acquisite dalla
camera iperspettrale di PRISMA.
L’immagine di radianza al sensore è quella relativa alla zona di Firenze, ottenuta tramite il
simulatore di immagini/dati sviluppato nel WP 200 e descritto nel capitolo 5.2. Un dettaglio
di tale immagine dove sono evidenziati i pixel di test è riportato in Fig. 6.14. Per la correzione
abbiamo utilizzato come valori di partenza, oltre ai parametri di acquisizione del sensore,
anche le grandezze fisiche che caratterizzano l’atmosfera terrestre quali i profili di pressione,
temperatura, umidità, gli aerosol ed i principali componenti gassosi attesi per il momento ed il
luogo in cui sono state simulate le acquisizioni.
Fig. 6.14: Dettaglio dell’immagine sintetica corretta atmosfericamente dove sono
evidenziati i pixel utlizzati per il confronto con la verità a terra.
In Fig. 6.15 vengono riportati per alcuni pixel caratteristici i grafici relativi agli spettri di
radianza al sensore (a) e di riflettanza a terra (b). In Fig. 6.15b vengono riportati per confronto
gli spettri dei medesimi pixel estratti dall’immagine di verità a terra.
97
Forest
Asphalt
Grass
Roof
Lake
Soil
Grass 2
1600
Radiance (100 microW/ m^2 sr nm)
1400
1200
1000
800
600
400
200
0
400
900
1400
Wavelength (nm)
1900
2400
a
Forest
Asphalt
Grass
Roof
Lake
Soil
Grass 2
Forest GT
Asphalt GT
Grass GT
Roof GT
Lake GT
Soil GT
Grass 2 GT
0.7
0.6
Reflectance
0.5
0.4
0.3
0.2
0.1
0
400
900
1400
Wavelenght (nm)
1900
2400
b
Fig. 6.15 Spettri di radianza al sensore estratti dall’ immagine sintetica (a). Spettri di
riflettanza a terra (linea continua) estratti dall’immagine sintetica corretta
atmosfericamente(b) confrontati con le verità a terra (pallino).
Di seguito vengono anche riportati i test di sensibilità della procedura di correzione
atmosferica al variare del contenuto colonnare di vapor d’acqua (Fig. 6.16) e della visibilità
(Fig. 6.17). Come esempio vengono mostrati gli spettri estratti da un pixel di erba, di suolo e
di acqua. Si nota che il retrival è insensibile a variazioni del contenuto colonnare di vapor
d’acqua entro un valore del 5%, per quanto riguarda la visibilità si nota una maggiore
insensibilità al crescere del valore della visibilità medesima (cioè andando verso valori
caratteristici di atmosfere molto limpide).
98
VegetaC_ref
VegetaC_+5H2O
VegetaC_+10H2O
1
VegetaC_+20H2O
VEGETAZIONE
0.9
0.8
0.7
Reflectance
0.6
0.5
0.4
0.3
0.2
0.1
0
400
500
600
700
800
900
1000
1100
1200
1300
1400
Wavelength (nm)
PistaC_ref
PistaC_+5H2O
PistaC_+10H2O
PistaC_+20H2O
1
PISTA AEROPORTO
0.9
0.8
0.7
Reflectance
0.6
0.5
0.4
0.3
0.2
0.1
0
400
600
800
1000
1200
1400
Wavelength (nm)
LagoC_ref
LagoC_+5H2O
0.1
LagoC_+10H2O
LagoC_+20H2O
LAGO
0.09
0.08
0.07
Reflectance
0.06
0.05
0.04
0.03
0.02
0.01
0
400
500
600
700
800
900
1000
1100
1200
1300
1400
Wavelength (nm)
Fig. 6.16 Variazione della riflettanza ricavata dopo le correzioni atmosferiche al variare
del contenuto colonnare di acqua per un valore di visibilità pari a 20 Km.
99
Vegeta_vis=10
0.7
Vegeta_vis=15
Vegeta_vis=20
VEGETAZIONE
0.6
Reflectance
0.5
0.4
0.3
0.2
0.1
0
0
500
1000
1500
2000
2500
3000
2500
3000
2500
3000
Wavelength (nm)
Pista_vis=10
Pista_vis=15
Pista_vis=20
0.7
PISTA AEROPORTO
0.6
Reflectance
0.5
0.4
0.3
0.2
0.1
0
0
500
1000
1500
2000
Wavelength (nm)
Lago_vis=10
Lago_vis=15
Lago_vis=20
0.09
LAGO
0.08
0.07
Reflectance
0.06
0.05
0.04
0.03
0.02
0.01
0
0
500
1000
1500
2000
Wavelength (nm)
Fig. 6.17 Variazione della riflettanza ricavata dopo le correzioni atmosferiche al variare
della visibilità per un contenuto di vapor d’acqua standard.
100
101
6.3.2 METODO AUTONOMO DI CORREZIONE DI IMMAGINI
IPERSPETTRALI
Nell’ambito del progetto OPTIMA è stato implementata una procedura di correzione degli
effetti atmosferici che stima in maniera più accurata il contributo della luce diffusa che
illumina le superfici osservate. Gli sviluppi di tale procedura si basa sulla simulazione dei
contributi atmosferici tramite il programma MODTRAN.
MODTRAN MODEL
AT-SENSOR
RADIANCE
3 RUNS (albedo = 0)
1 RUN (albedo = 1)
PATH RADIANCE
ATMOSPHERIC
CORRECTION
TRANSMITTANCE
GROUND IRRADIANCE
GROUND
REFLECTANCE
Fig. 6.18: Procedura di correzione delle immagini iprspettrali.
La procedura di ripulitura atmosferica attuale genera, utilizzando il modello di
trasferimento radiativo Modtran 5.2, una mappa di riflettanza al suolo (Fig. 6.18).
Tre run del modello nella geometria di acquisizione e con riflettanza al suolo nulla
vengono utilizzati per stimare il contributo di path radiance retrodiffuso dall’atmosfera,
mentre un singolo run serve a calcolare la trasmittanza verticale dell’atmosfera. Con questi
dati viene prodotta la mappa di riflettanza al suolo.
( )
Lobs ( ) L path ( , s , v , r )
E grnd ( , s )Tobs (v )
Eq. 6-18
dove:
( ) è lo spettro di riflettanza al suolo per ogni lunghezza d’onda ,
s ,v , r sono gli angoli di zenith solare, di zenith di osservazione e di azimuth relativo
sole - direzione di vista,
L path è il contributo di path radiance (radianza retrodiffusa al sensore dall’atmosfera),
Lobs è la radianza osservata dal sensore per il pixel generico dell’immagine,
E grnd è l’irradianza incidente sul suolo,
Tobs è la trasmittanza lungo la linea di osservazione terreno – sensore.
102
Lettura immagine satellitare e opportuna conversione delle unità fisiche
Scelta del filtro per la simulazione della risposta del sensore
Lettura file *.tp5 (file di input Modtran) per definizione parametri con cui
è stata eseguita la simulazione
Lettura output Modtran 5 dal corrispondente file *.7sc
Ricampionamento spettro (simulato da Modtran) su ogni banda
dell’immagine
1.
2.
3.
4.
loop su ogni
banda
Lettura contributi:
Trasmittanza;
radianza retrodiffusa nella parte sinistra
dell’immagine;
radianza retrodiffusa nella parte centrale
dell’immagine;
radianza retrodiffusa nella parte destra
dell’immagine.
Correzione per
effetti di
trapping?
Sì
Calcolo effetti
di trapping
No
Interpolazione lineare radianza diffusa su tutte le colonne dell’immagine
Ricampionamento spettro di trasmittanza su ogni banda dell’immagine
Stima irradianza al suolo
Calcolo riflettanza per ogni banda dell’immagine
Scrittura immagine di riflettanza su disco
Fig. 6.19: Diagramma di flusso della procedura di ripulitura dagli effetti atmosferici di Fig. 6.18.
Il valore di E grnd è calcolato mediante un run del modello Modtran utilizzando un albedo
unitario. Con lo stesso run si calcola la trasmittanza dell’atmosfera in direzione nadirale.
Ulteriori tre run con direzione di vista corrispondente al lato sinistro, al centro e al lato
destro dell’immagine con albedo nullo forniscono direttamente il valore della path radiance.
103
MODTRAN MODEL
AT-SENSOR
RADIANCE
3 RUNS (albedo = 0)
1 RUN (albedo = 1)
PATH RADIANCE
ATMOSPHERIC
CORRECTION
TRANSMITTANCE
GROUND IRRADIANCE
GROUND
REFLECTANCE
(first guess )
MODTRAN MODEL
3 RUNS (albedo = <>)
PATH RADIANCE
ATMOSPHERIC
CORRECTION
TRANSMITTANCE
GROUND IRRADIANCE
GROUND
REFLECTANCE
(considering atmoshpereground interaction)
Fig. 6.20: Procedura iterativa di correzione delle immagini iperspettrali: la stima di ( )
ottenuta con il primo set di simulazioni Modtran è utilizzata per produrre una mappa di
riflettanza al suolo spazialmente mediata ( ) , da utilizzare come input per un nuovo set
di simulazioni per ottenere una mappa di riflettanza al suolo più accurata nel secondo step
della procedura.
Una evoluzione di questo metodo per una migliore simulazione della componente diffusa
della radiazione che illumina il pixel è rappresentata in Fig. 6.20.
Nella prima parte della procedura, una mappa di riflettanza al suolo è calcolata come in Fig.
6.18. Successivamente, tale stima è utilizzata per produrre una mappa di riflettanza al suolo
spazialmente mediata ( ) , da utilizzare come input per un nuovo set di simulazioni
tramite Modtran e ottenere, a partire da una stima più realistica della radiazione diffusa che
illumina il pixel al suolo, una mappa di riflettanza al suolo più accurata.
Il modello di Fig. 6.18 è stato implementato mediante procedura software ed è stato
utilizzato per la ripulitura delle immagini simulate di PRISMA. Il modello iterativo di Fig.
6.20 è attualmente in fase di sviluppo e implementazione.
104
Per entrambi i metodi il sistema offre la possibilità di tenere conto degli effetti di trapping
tra pixel vicini, utilizzando come modello per la radianza osservata al sensore la seguente
formula:
,
,
,
,
dove il termine
,
1
,
,
Eq. 6-19
è dato dal contributo riflesso dal suolo (in maniera lambertiana) e
dal contributo di trapping, ed è l’albedo dell’atmosfera. La formulazione per la stima del
contributo di trapping è la seguente. La irradianza che illumina il pixel osservato è scrivibile,
tenendo conto anche delle riflessioni multiple della radiazione tra il suolo e l’atmosfera (v.
Fig. 6.21), come:
,
,
Eq. 6-20
,
Fig. 6.21: Contributo di trapping dato dalle riflessioni multiple tra il suolo e l’atmosfera
sovrastante, di albedo .
Conseguentemente, la radiazione osservata al suolo diventa:
,
,
,
,
1
Eq. 6-21
,
,
,
e, sostituendo la serie geometrica 1
l’espressione comprensiva degli effetti di trapping:
,
,
con il suo limite si ottiene
,
,
,
1
105
,
,
Eq. 6-22
6.4 PRODOTTO “NOISE MODELING”
6.4.1 DESCRIZIONE
6.4.1.1 INTRODUZIONE
Come evidenziato in ref. [4] il rumore presente nei dati iperspettrali è modellato attraverso
la somma di un termine di rumore elettronico indipendente dal segnale ed un termine di
rumore fotonico dipendente dal segnale
Il segnale osservato g(i,j) è quindi rappresentabile con:
g (i, j ) f (i, j )
f (i, j ) u (i, j ) w(i, j )
Eq. 6-23
dove u(i, j ) e w(i, j ) sono processi aleatori indipendenti da f e fra di loro, stazionari
spazialmente, autocorrelati con media zero e varianza u2 e w2 .
Al fine di facilitare l'interpretazione dei risultati, ricordiamo che il rapporto segnale rumore
(SNR) è espresso nel seguente modo:
E[ f ]2
E[ f ]2
SNRdB 10 log10
10 log10
2
2
2
E
[
f
]
v
u
w
Eq. 6-24
e che in tale formula w2 è la potenza del rumore indipendente dal segnale, mentre
·
è
la potenza del rumore dipendente dal segnale. Per la caratterizzazione di un rumore così
modellato è necessario stimare il valore di w2 e u2 come evidenziato in ref. [4] avvalendosi
delle aree omogenee dell'immagine dove vale
g2 i, j u2 E[ f (i, j )] w2
Eq. 6-25
La varianza del rumore osservato ha quindi una dipendenza lineare dalla media del
segnale, e i termini w2 e u2 sono rispettivamente il termine noto e il coefficiente angolare
della retta che esprime detta relazione. Dato un numero sufficiente di coppie, { g2 , E[ f ] }
calcolati su aree omogenee, è possibile ricavare w2 e calcolando i parametri della retta di
regressione della dispersione di punti di coordinate ( g2 , E[ f ] ).
6.4.1.2 ANALISI DELLA SEQUENZA HYPERION DEL 19 DICEMBRE
2002
La valutazione delle caratteristiche di rumore del sensore Hyperion è iniziata analizzando
la sequenza acquisita il 19 dicembre 2002 quando il sensore osservava Firenze e il suo
interland. Purtroppo sia l’analisi automatica sia lo studio foto interpretativo hanno evidenziato
106
che in tale scena è presente una sola area omogenea rappresentata dal Lago di Bilancino, non
essendo significativo il contributo di radianza proveniente dal fondale. La sola acqua ha
determinato però una registrazione di radianza al sensore molto bassa con un rumore fotonico
trascurabile. Per tale ragione è possibile stimare la sola componente additiva del rumore, non
fornendo al contempo alcuna stima della componente moltiplicativa. Su tale regione, infatti,
quest’ultima è trascurabile.
Anche limitandoci alla stima della componente additiva del rumore, si evidenziano
ulteriori difficoltà.
Osservando nel dettaglio i pattern registrati nella citata area omogena dai due spettrometri
VNIR e SWIR, è possibile riscontrare alcuni effetti che suggeriscono una distribuzione
statistica diversa dei dati dei due spettrometri. Nell’immagine di Fig. 6.22-a si evidenzia una
distribuzione casuale avente come valor medio quello della radianza media dell’acqua; al
contrario l’immagine riportata in Fig. 6.22-b mostra un pattern che non può essere in alcun
modo riconducibile né al rumore modellato secondo la formula Eq.6-1 né alle proprietà
intrinseche della scena. E’ infatti causato dalle caratteristiche specifiche dello spettrometro
SWIR come si è potuto riscontrare nei report forniti da NASA-JPL e Boeing (Jay S.
Pearlman, Hyperion Validation Report, July 16, 2003).
A causa di ciò la stima numerica della componente additiva del rumore può essere ritenuta
rigorosamente valida solo in riferimento allo spettrometro VNIR dal momento che nello
SWIR esiste un contributo sistematico, presumibilmente piccolo, alla varianza del rumore.
(a)
(b)
Fig. 6.22: Acquisizione del 19 dicembre 2002; Dettaglio del Lago di Bilancino (a) banda-44
sensore VNIR (b) banda-78 sensore SWIR
Se come già affermato la stima numerica è da ritenersi valida solo per il VNIR, il discorso
è diverso per quanto riguarda gli andamenti dei parametri al variare della lunghezza d'onda. In
altre parole poiché è da ritenersi che il particolare pattern osservato in Fig. 6.22-b eserciti la
medesima influenza su ciascuna delle bande SWIR, è ancora possibile osservare e valutare
l’andamento della componente additiva al variare della lunghezza d’onda. Confrontando
l’andamento del valore stimato della componente additiva ( Fig. 6.23-a ) con quello del valore
della 128-esima colonna della matrice dei guadagni (Fig. 6.23-b) del sensore, è immediato
riscontrare la loro similarità. La componente di rumore additivo ha quindi una forte
dipendenza dai guadagni applicati così come ci si aspetta. In Fig. 6.24 è riportata in dettaglio la
componente additiva del rumore del solo spettrometro VNIR.
L’indisponibilità di sufficienti zone omogenee rende necessario per avere la stima di
entrambe le componenti di rumore, l’analisi di un’altra sequenza.
107
(a)
(b)
Fig. 6.23: (a) Stima della componente additiva sulla zona omogenea Lago di Bilancino acquisita il
19 Dicembre 2002 ; (b) colonna 128 della matrice di guadagno relativa a quella stessa acquisizione
Fig. 6.24: Stima della componente additiva del rumore dello spettrometro VNIR stimata sulla zona
omogenea Lago di Bilancino dell’acquisizione 19 Dicembre 2002.
6.4.1.3 ANALISI DELLA SEQUENZA HYPERION DEL 12 GIUGNO
2001
Per poter effettuare una stima efficace di entrambi i parametri di rumore è stata scelta, per le
sue caratteristiche, la sequenza acquisita il 12 giugno 2001 quando il satellite riprendeva la
Groenlandia. Nella scena acquisita è presente sia una zona marina sia un' area nevosa
pianeggiante che presentano entrambe buone caratteristiche di omogeneità. Per le loro
caratteristiche intrinseche, inoltre, tali zone hanno una radianza media posta agli estremi della
banda dinamica. Al fine di facilitare il processo di stima è stata selezionata un’opportuna parte
della scena acquisita. In Fig. 6.25 è riportata l’immagine RGB della parte di acquisizione
utilizzata per la stima. In
Fig. 6.26 sono riportati invece alcuni valori medi di radianza al sensore. Per i successivi
calcoli di SNR è stato sempre utilizzato come segnale di riferimento il 30% della radianza
media della neve.
108
Fig. 6.25: immagine RGB (bande 28, 22 e 15) della parte di acquisizione utilizzata per la stima.
Fig. 6.26: radianze medie relative alla scena esaminata.
L’analisi automatica di ciascuna banda ha correttamente riconosciuto come omogenee la
zona marina e quella nevosa. Pur tuttavia le bande acquisite dallo spettrometro SWIR
presentano un forte residuo di striping che rende problematica una stima efficace dei
parametri del rumore.
Osservando i risultati riportati in Fig. 6.27 è possibile comunque fare diverse considerazioni
interessanti. Innanzitutto, osservando l’andamento della componente di rumore indipendente
dal segnale (Fig. 6.27-b), essa ha lo stesso andamento di quella riportata in Fig. 6.23-a. Questo
fatto conferma la validità di entrambi gli approcci adottati per la sua stima. Osservando inoltre
l’andamento delle due componenti di rumore è possibile notare che soprattutto nelle
lunghezze d’onda dello SWIR molti valori sono zero. Questo valore è assegnato per
convezione quando la stima del parametro fornisce un valore negativo. Poiché questo non può
avere riscontri fisici, è determinato dalle difficoltà della stima stessa. Anche utilizzando una
sequenza particolarmente ottimale per la procedura di stima, non si riescono dunque a
raggiungere i risultati sperati. Questo è purtroppo confermato dall’osservazione
dell’andamento dei residui (Fig. 6.27-d): nello spettrometro SWIR si hanno infatti valori assai
bassi e un andamento fortemente discontinuo.
Osservando la
Fig. 6.28, dove è riportato l’andamento dell’SNR, è possibile osservare che nelle bande
SWIR, dove il calcolo ha fornito valori fisicamente ammissibili, l’SNR è sensibilmente più
basso di quello riscontrato nelle bande VNIR.
Quest’ultima considerazione è comunque rilevante e giustifica l’aver elaborato l’intera
sequenza iperspettrale. Per ottenere però una stima maggiormente efficace è opportuno
concentrarsi sul solo spettrometro VNIR. Così facendo infatti è possibile utilizzare un setup di
parametri dell’algoritmo di stima ottimale proprio per l’analisi delle sole lunghezze d’onda
VNIR.
109
(a)
(b)
(c)
(d)
Fig. 6.27: Grafico dei parametri di rumore stimati su un dettaglio dell’acquisizione 19 dicembre
2002: (a) potenza del rumore dipendente dal segnale; (b) potenza del rumore indipendente dal
segnale; (c) valori di
(d) residui.
(b)
(a)
Fig. 6.28: Stima dell’ SNR avendo adottato come segnale di riferimento il 30% della radianza
della neve espresso (a)in dB (b) in ampiezza.
110
(a)
(b)
(c)
(d)
Fig. 6.29: Grafico dei parametri di rumore stimati sull’intera acquisizione del 19 dicembre
2002per il solo spettrometro VNIR: (a) potenza del rumore dipendente dal segnale; (b) potenza del
rumore indipendente dal segnale; (c) valori di
(d) residui.
(b)
(a)
Fig. 6.30: (a) Stima dell’ SNR avendo adottato come segnale di riferimento il 30% della radianza
della neve espresso (a)in dB (b) in ampiezza.
111
La loro adozione consente inoltre di poter elaborare l’intera scena acquisita. I risultati così
ottenuti sono riportati Fig. 6.29 e Fig. 6.30. Ancora una volta le Fig. 6.29-a, Fig. 6.29-b e Fig.
6.29-c evidenziano un aumento delle componenti di rumore per le lunghezze d’onda poste ai
margini della sequenza.
L’andamento del residuo (Fig. 6.29-d) presenta valori sempre molto alti, fatto che indice di una
stima particolarmente efficace. A conferma di ciò, la
Fig. 6.31 riporta lo scatter plot relativo alla banda 8 delle coppie { g2 , E [ f ] } e della retta di
regressione calcolata. E’ immediato osservare l’efficacia della stima compiuta.
Coerentemente con l’andamento dei parametri di rumore, l’ SNR (Fig. 6.30) ha valori più
bassi per quelle lunghezze d'onda che si trovano agli estremi della banda osservata.
La messa a punto dei parametri di stima ha permesso di ottenere questa volta sempre valori
fisicamente ammissibili.
Fig. 6.31: Scatter plot relativo alla banda 9 della coppie { g2 , E[ f ] }
6.4.1.4 CONCLUSIONI
L’analisi volta a stimare il rumore del sensore Hyperion ha messo può essere riassunta in
alcuni punti essenziali:
Poiché il sensore ha un pixel a terra mediamente intorno a 30m è difficile avere delle
scene con aree omogenee con caratteristiche idonee alla stima. In particolare risulta
arduo avere zone omogenee sufficientemente grandi e aventi radianza media
sufficientemente diversa da poter effettuare una stima efficace del coefficiente
angolare. Questo suggerisce una ulteriore una raccomandazione per la scelta dei siti di
calibrazione della missione PRISMA.
Lo spettrometro SWIR presenta caratteristiche estremamente peculiari che
determinano la non validità del modello di rumore adottato.
Lo spettrometro SWIR ha un rapporto segnale rumore sensibilmente più basso di
quello VNIR.
L’andamento dei parametri di rumore per entrambi gli spettrometri è strettamente
legato alla matrice dei guadagni.
112
6.5 PRODOTTO “CARATTERISTICHE SPAZIALI E
SPETTRALI”
6.5.1 MESSA A PUNTO METODOLOGIE PER LA STIMA
DELLA MTF
In questa sezione vengono considerate le problematiche relative alla stima della MTF di
sistema a partire dai dati acquisiti. Vengono prima considerati i metodi che si basano su
oggetti di forma nota (sorgenti puntuali ed edge) e su un uso congiunto reso possibile dalla
presenza di dati a risoluzione diversa (image fusion).
6.5.1.1 INTRODUZIONE – OGGETTI DI FORMA GEOMETRICA
NOTA
Uno delle caratteristiche che maggiormente influenza la qualità delle immagini acquisite è
la forma dell’MTF del sistema di acquisizione elettro-ottico. La condizione ottimale sarebbe
una forma rettangolare con frequenza di taglio pari alla frequenza di Nyquist. Ovviamente una
tale forma non è fisicamente realizzabile. Nei sistemi di acquisizione reali l’MTF è un curva
decrescente non nulla alla frequenza di Nyquist. Per tale ragione il dato acquisito è affetto da
fenomeni di aliasing.
Data l’estrema importanza che tale curva riveste nel determinare le caratteristiche spettrali
delle immagini acquisite, le sue caratteristiche sono attentamente definite in fase progettuale.
Purtroppo, come è ovvio aspettarsi, tali proprietà non sono stabili nel tempo ma subiscono
variazioni causate da molteplici fattori non ultima l’obsolescenza della strumentazione stessa.
E’ quindi di fondamentale importanza la messa a punto di metodologie che permettano la sua
stima durante il tempo in cui la strumentazione è operativa. Per la strumentazione satellitare è
indispensabile definire procedure e metodologie che utilizzino le immagini acquisite e/o
acquisibili non essendo possibile compiere ulteriori sperimentazioni in laboratorio. Dette
metodologie si possono limitare a fornire una stima del valore dell’MTF alla frequenza di
Nyquist oppure possono cercare di stimare complessivamente il suo andamento.
In ogni caso questi obiettivi sono tutt’altro che semplici da raggiungere in quanto devono
essere superate molteplici difficoltà. La più significativa è la necessità di avere la
corrispondente point spread function (psf) o grandezze ad essa strettamente connesse
campionate ad una risoluzione sub-pixel. Per avere cioè una stima sufficiente accurata
dell’MTF è necessario avere i campioni della psf ad una frequenza maggiore di quella
fisicamente realizzabile dal sistema stesso. Dato che una risoluzione sub-pixel non è ottenibile
direttamente, la si ricava elaborando opportunamente particolari configurazioni geometriche
presenti nell’immagine acquisita. In particolare si analizzano bordi diritti (edge) con
particolari inclinazioni rispetto alla griglia di campionamento. Per ottenere i migliori risultati
è necessario che detti edge siano particolarmente contrastati.
Se la presenza di edge di tali caratteristiche è fondamentale per l’applicazione di una
qualsivoglia metodologia, si possono comunque evidenziare due distinti approcci tra tutti
quelli rilevanti: il primo utilizza un solo edge e quindi opera su di un gradino; il secondo ne
richiede due paralleli uguali ed opposti ad una distanza tale da poterli considerare un singolo
impulso spaziale (in realtà una funzione rettangolare adeguatamente stretta). In altre parole,
nel presente contesto la parola impulso non è sinonimo di delta di Dirac, ma vuole indicare
appunto un rettangolo adeguatamente stretto.
113
Nel primo caso, per determinare la MTF elettro-ottica, prima si isola il profilo, poi lo si
modella analiticamente e quindi si ricava la psf stessa derivando analiticamente il modello
appena determinato. Applicando la FFT al campionamento numerico della psf, si ottiene
quindi l’andamento dell’MTF e il suo valore alla frequenza di Nyquist.
Il secondo metodo si basa sul fatto che la trasformata di Fourier (FT) di una funzione
rettangolare è un sinc e tende a diventare costante nel caso di impulso ideale. Dopo aver
calcolato la trasformata di Fourier dell’impulso , si ottiene l’MTF del sistema calcolando il
rapporto tra il modulo di questa FT e quello della FT dell’impulso ideale (rect). Il metodo
presenta notevoli criticità non ultima quella della dimensione dell’impulso in relazione al
passo di campionamento. Un impulso troppo stretto non permette al sistema di registrarlo
correttamente, un impulso troppo largo non sarebbe più tale ma risulterebbe come due edge
distinti.
Fig. 6.32: Schema geometrico dell’impulso e dell’edge.
In Fig. 6.32 è riportata una possibile disposizione utile per entrambi gli elementi
geometrici di interesse. La piccola rotazione (8º) che entrambi gli oggetti hanno rispetto alla
direzione across track è proprio quella che permette la risoluzione sub-pixel. Più avanti
nell’esposizione sarà delineata la spiegazione di questo fatto.
Come è facile dedurre, entrambi gli approcci hanno il problema di richiedere che la scena
acquisita contenga oggetti che abbiano stringenti caratteristiche come quelle riportate in Fig.
6.32. E’ ovviamente assai difficile che in una scena possano trovarsi oggetti aventi proprietà
così ben stabilite; per ovviare a ciò detti oggetti sono stati anche fisicamente realizzati e posti
in loco al momento delle campagne di validazione degli strumenti. La loro collocazione
avviene di norma in luoghi dove l’acquisizione è particolarmente vantaggiosa (ad esempio
collocazione nadirale, su terreno piano, con alto contrasto rispetto agli oggetti circostanti).
Questa soluzione certamente molto più onerosa da un punto di vista realizzativo ha permesso
e permette una forte riduzione dell’aleatorietà delle misure e quindi una maggiore accuratezza
delle stesse.
Come si è potuto intuire da questa introduzione la stima dell’MTF è una procedura
complessa che comporta differenti fasi di elaborazione; per evitare l’affastellarsi delle
problematicità si è preferito iniziare lo studio con i dati sintetici. Così facendo si può definire
completamente un flusso di elaborazione che potrà essere l’ossatura di quello utilizzabile su
dati reali. Inoltre, pur elaborando immagini sintetiche, sono state affrontate e approfondite
molte delle criticità principali riscontrabili nello stesso processing di dati reali.
6.5.1.2 EDGE: REALIZZAZIONE DELL’IMMAGINE SINTETICA
114
Questa procedura realizza un’immagine sintetica che contiene un solo rettangolo del quale
è però possibile variare entrambe le sue dimensioni.
Riprendendo le considerazioni dell’introduzione, qualora il rettangolo sia sufficientemente
stretto è possibile considerarlo una valida approssimazione dell’impulso; al contrario se la
sua ampiezza è molto maggiore del passo di campionamento, il sistema di acquisizione
elettro-ottico lo tratterà come due edge distinti. Variando opportunamente l’ampiezza è quindi
possibile realizzare entrambi le entità. L’altezza invece non è un parametro particolarmente
critico: più è alto e più numerose saranno le occasioni in cui è possibile effettuare la stima.
(b)
(c)
(a)
(d)
Fig. 6.33: (a) Immagine sintetica originale;
(b) immagine sintetica ricampionata con aggiunta di rumore additivo moltiplicativo;
(c) dettaglio (zoom 4x) dell’immagine ricampionata;
(d) MTF della psf dell’ipotetico sistema elettro-ottico
115
Ovviamente, un altro fondamentale parametro di ingresso della procedura è l’angolo di
rotazione rispetto alla direzione across track. In questa sperimentazione è stato impostato ad
8º.
L’immagine così sintetizzata viene quindi filtrata utilizzando l’ipotetica psf del sistema
elettro-ottico e poi sotto campionata in modo da ottenere l’immagine aliasata che costituirà
l’ingresso della procedura di stima dell’MTF. In questa simulazione si è utilizzato un fattore
di downsampling di 4 e un filtro simmetrico separabile di forma gaussiana avente differenti
valori di MTF alla frequenza di Nyquist (F=0.125).
Per avere un’immagine sintetica aliasata più realistica è possibile aggiungere ad essa un
rumore dipendente dal segnale secondo la seguente formula:
v(i, j )
f (i, j ) u (i, j ) w(i, j )
Eq. 6-26
In tale formula gli indici i , j si riferiscono rispettivamente alle righe e alle colonne,
f (i, j ) è il campione ideale privo di rumore, u(i, j ) è un processo aleatorio indipendente da f
e w, stazionario spazialmente, autocorrelato con media zero e varianza u2 e w(i, j ) è un
processo aleatorio indipendente da f e u , stazionario spazialmente, autocorrelato, con media
zero e varianza w2 .
I parametri utilizzati hanno fissato che la componente dipendente dal segnale f (i, j ) u(i, j )
sui valori dell’impulso stesso avesse una varianza 4 volte maggiore di quella della
componente indipendente. In Fig. 6.33 sono riportati l’impulso originale (Fig. 6.33.a), la
versione ricampionata con la psf avente una MTF gaussiana di 0.3 alla frequenza di Nyquist
(Fig. 6.33.b) e anche l’MTF della psf adottata (Fig. 6.33.d).
6.5.1.2.1 PROCEDURA DI STIMA DELLA MTF
Presentiamo adesso in dettaglio la procedura di stima dell’MTF. Il suo schema a blocchi è
riportato in Fig. 6.34. Nel proseguo del paragrafo sarà presentato e spiegato ciascun blocco di
cui è composta. Tutte le figure illustrate qualora non espressamente indicato sono state
ricavate utilizzando la psf gaussiana con un MTF a Nyquist pari a 0.3.
Il primo blocco operativo presente compie un’operazione molto semplice: seziona il
rettangolo ovvero individua una riga dell’immagine. Quando si elabora l’immagine sintetica
tale scelta è significativa nel caso in cui l’immagine sia affetta da rumore mentre ha scarsa
importanza nell’altro caso.
Nel caso di immagine reale, la scelta delle riga ha comunque influenza sia perché non è
possibile prescindere dal rumore sia perché nell’acquisizione reale sono presenti ulteriori
fattori di variabilità quali ad esempio il movimento del satellite e l’ottica non ideale.
Quest’ultima può dare luogo a fenomeni non modellabili attraverso la sola psf.
Scelta di
una sezione
del rettangolo
Individuazione del
profilo del rect
Derivata
analitica
Individuazione
edge
Campionamento
derivata
Modellizzazione
edge
FFT
Fig. 6.34: Schema a blocchi della procedura di stima dell’MTF.
116
Stima MTF
Fig. 6.35: Proiezione dei punti dell’edge sulla sezione esaminata (riga considerata).
Una volta scelta la sezione (riga) del rettangolo, il secondo operativo dello schema
riportato in Fig. 6.34 individua con risoluzione sub-pixel il profilo del rect stesso. Abbiamo
già affermato che ciò è possibile perché esiste un angolo non nullo ( in questo caso pari a 8º)
tra l’impulso e la direzione across track.
In Fig. 6.22 è visualizzato graficamente l’idea che sta alla base di ciò. L’oggetto azzurro è il
rettangolo. La retta passante per il punto A è la sezione scelta dal primo blocco di
elaborazione. La distanza
è l’ampiezza del rettangolo. L’angolo che questo forma con la
direzione across track è appunto di 8º. Osservando ciascuna area della sequenza verticale di
quadrati rossi si osserva che, partendo dal basso, la percentuale di area occupata dal rettangolo
cresce progressivamente finché per il quadrato verde tutta l’area del quadrato è
completamente occupata dal rettangolo. Il numero di quadrati rossi è pari a
1
Eq. 6-27
dove è l’angolo di rotazione. E’ immediato verificare che x=7,1153 e quindi il numero di
quadrati rossi è 7. Tale valore è proprio la frequenza di sub-campionamento. In quest’analisi
non si è tenuto però conto che la psf è più ampia di un pixel e pertanto si avranno più colonne
giustapposte di quadrati rossi.
Una volta individuata la sezione del rect con risoluzione sub-pixel, il terzo blocco isola i
profili dei due distinti edge. In Fig. 6.22 sono riportati sia il profilo del rect che quello dei due
edge distinti. Coerentemente con il modello di rumore adottato si riscontra visibilmente più
rumore sui livelli alti di segnale.
117
(a)
(c)
(b)
Fig. 6.36: Profilo del rect e dei due edge distinti che lo compongono.
Il successivo blocco modella analiticamente il profilo di ciascun edge.
Per ottenere in forma analitica ciascuno dei due profili è necessario adottare un modello
parametrico ed eseguire un fitting sui dati discreti. I modelli adottati in questa fase progettuale
sono stati due entrambi a quattro parametri: il primo derivato dalla funzione di Fermi ed il
secondo dall’erf. Il modello basato sulla funzione di Fermi ha la seguente formula:
Eq. 6-28
1
dove a, b, c, d sono i parametri attraverso i quali ottenere il fitting.
Leggermente più complesso il caso dell’erf in quanto quest’ultima è definita in forma
chiusa attraverso un integrale. Per semplificare il calcolo del fitting utilizziamo quindi una sua
forma approssimata basata sulla seguente formula:
1
1
Eq. 6-29
Poiché tale formula è valida solo per
0 ed approssima la erf con un errore massimo di
5 · 10 . I valori dei coefficienti sono i seguenti: a1 = 0.278393, a2 = 0.230389, a3 = 0.000972
e a4 = 0.078108.
118
Dalla precedente approssimazione della erf è possibile ricavare il modello da adottare nel
nostro contesto:
1
2
1
1
2
1
| |
Eq. 6-30
Dove z vale:
Eq. 6-31
Osservando le due equazioni precedenti si constata che anche questa volta il modello
adottato è a quattro parametri: a, b, c, d.
Una volta definito il modello, il fitting viene calcolato attraverso una minimizzazione non
lineare ai minimi quadrati utilizzando algoritmo di minimizzazione Levenberg-Marquardt. In
Fig. 6.25 sono riportati l’andamento dei due modelli per entrambi gli edge. La Fig. 6.25 non
evidenzia alcuna differenza tra le due differenti modellizzazioni.
Per tale ragione nella Fig. 6.38 sono confrontate direttamente le due modellizzazioni.
Anche in questa seconda rappresentazione, però, si riscontrano differenze assolutamente
minime.
(a)
(b)
(c)
(d)
Fig. 6.37:Modellizzazione di ciascun edge: (a) e (b) utilizzando il modello derivato della
funzione erf; (c) e (d) utilizzando quello ricavato dalla funzione di Fermi .
119
(b)
(a)
Fig. 6.38:Confronto tra le due modellizzazioni: (a) edge sinistro (b) edge destro.
(a)
(b)
(c)
(d)
Fig. 6.39:MTF stimate: (a) edge sinistro modellato con la funzione erf; (b) edge destro
modellato con la funzione erf; (c) edge sinistro modellato con la funzione di Fermi; (d) edge
destro modellato con la funzione di Fermi.
120
(b)
(a)
Fig. 6.40:Confronto tra le due modellizzazioni in assenza di rumore : (a) edge sinistro
(b)edge destro.
(a)
(b)
(c)
(d)
Fig. 6.41: (a) edge sinistro modellato con la funzione erf; (b) edge destro modellato con la
funzione erf; (c) edge sinistro modellato con la funzione di Fermi; (d) edge destro modellato
con la funzione di Fermi.
Una volta ottenuta l’equazione analitica dell’edge, attraverso le ulteriori operazioni
matematiche riportate nello schema di Fig. 6.34, è possibile effettuare la stima dell’MTF.
121
La Fig. 6.39 riporta gli andamenti delle MTF misurate e di quella modellata utilizzata
durante il filtraggio. Osservando i risultati riportati in Fig. 6.39, non è immediato stabilire
quale modellizzazione dell’edge sinistro sia più efficace. Al contrario, osservando i risultati
relativi all’edge destro risulta immediato constatare che la modellizzazione basata sulla
funzione erf dà prestazioni migliori. Tale discrepanza è legata alla presenza del rumore, unico
fattore di aleatorietà tra i due edge.
Osservando la Fig. 6.41, dove è stata compiuta la stessa analisi con gli stesse impostazioni
ma sull’immagine sintetica priva di rumore, si constata, infatti, come a parità di modello
adottato non vi sia praticamente differenza tra i risultati ottenuti elaborando i due differenti
edge. Inoltre, confrontando i risultati ottenuti dalle due modellizzazioni si riscontra una chiara
maggiore efficacia di quella basata sulla funzione erf. Questa significativa differenza è
ottenuta a partire da modellizzazioni dell’edge che apparentemente sono ancora pressoché
uguali (Fig. 6.40). Questo fatto ci mostra chiaramente quanto sia un fattore critico la scelta del
modello.
6.5.1.2.2 POSSIBILI APPROFONDIMENTI
In questa fase di studio è stato sintetizzato un impulso dalle caratteristiche opportune;
dopo aver definito lo schema di elaborazione e i modelli adottati sono state compiute le prime
stime di MTF. I risultati ottenuti sono stati ampiamente incoraggianti. Pur tuttavia rimangono
ancora punti su cui può essere significativo approfondire lo studio:
Non sono state approfondite le problematiche relative alla lunghezza del filtro
adottato.
L’analisi qui presentata analizza una sola sezione del rettangolo alla volta: è
certamente uno sviluppo futuro significativo uno studio per valutare la robustezza del
metodo quando più sezioni concorrono contemporaneamente alla stima dell’MTF.
La valutazione dell’efficacia della metodologia su dati reali non è ancora stata
affrontata.
6.5.1.3 IMPULSO: REALIZZAZIONE DELL’IMMAGINE SINTETICA
Nella sezione precedente è stata descritta la metodologia di stima dell’MTF di un sistema
elettro-ottico basata sull’elaborazione un edge con un forte contrasto. Detto edge forma con la
direzione across track un angolo dell’ordine di circa 8º, quindi relativamente piccolo.
L’adozione di un edge lievemente inclinato permette di risolvere sub-pixel la psf del sistema.
Nel report precedente è stata anche introdotta una seconda metodologia di stima basata non
sull’elaborazione di un edge ma sul processing di un singolo impulso spaziale (in realtà un
funzione rettangolare adeguatamente stretta). In questo report tale metodologia è analizzata e
sperimentata in dettaglio. Anche in questo caso la procedura di stima è messa a punto su una
serie di immagini sintetiche e nei paragrafi successivi tale stima è ampiamente descritta.
Poiché il singolo impulso spaziale oggetto dell’elaborazione ha nel campo di vista del
satellite la disposizione riportata in Fig. 6.32, è necessario innanzitutto realizzare
un’immagine dalle caratteristiche analoghe.
122
Fig. 6.42: Schema geometrico dell’impulso
La procedura realizza, dunque, un’immagine che contiene un solo rettangolo
opportunamente inclinato rispetto alla direzione across track. La procedura accettando in
ingresso un set di parametri può realizzare un rettangolo sufficientemente stretto rispetto al
passo di campionamento tale da poterlo considerare una valida approssimazione dell’impulso.
Poiché l’altezza del rettangolo non è un parametro critico, essa è impostato ad un valore fisso.
L’altezza, infatti, determina solo il numero delle occasioni in cui è possibile effettuare la
stima: più è alto, più sono disponibili sezioni da cui impostare la stima. Qualora non
espressamente indicato tutte le sperimentazioni sono state condotte fissando ad 8º l’angolo di
rotazione rispetto alla direzione across track.
La forma del filtro passa basso è stata modellata sull’ipotetica psf del sistema elettro-ottico
La successiva operazione di downsampling, con fattore impostato fisso a 4, permette ottenere
l’immagine aliasata sulla quale effettuare la sperimentazione. Qualora non espressamente
indicato, Il filtro utilizzato è di forma gaussiana separabile e simmetrico. Tale gaussiana ha
un valore di 0.3 alla frequenza di Nyquist ( F=0.125 in frequenze normalizzate).
All’immagine aliasata così ottenuta è possibile aggiungere un rumore dipendente dal
segnale secondo la seguente formula:
v(i, j )
f (i, j ) u (i, j ) w(i, j )
Eq. 6-32
In tale formula gli indici i , j si riferiscono rispettivamente alle righe e alle colonne,
f (i, j ) è il campione ideale privo di rumore, u(i, j) è un processo aleatorio indipendente da f
e w, stazionario spazialmente, autocorrelato con media zero e varianza u2 e w(i, j ) è un
processo aleatorio indipendente da f e u , stazionario spazialmente, autocorrelato, con media
zero e varianza w2 .
123
I parametri utilizzati hanno fissato che la componente dipendente dal segnale f (i, j ) u(i, j )
sui valori dell’impulso stesso avesse una varianza 4 volte maggiore di quella della
componente indipendente. In Fig. 6.33 sono riportati l’impulso originale (Fig. 6.33.a), la
versione ricampionata con la psf avente una MTF gaussiana di 0.3 alla frequenza di Nyquist
(Fig. 6.33.b) e anche l’MTF della psf adottata (Fig. 6.33.c).
6.5.1.3.1 PROCEDURA
SPAZIALE
DI
STIMA
DELLA
MTF
DASATA
SULL’IMPULSO
L’idea sulla quale si base questa stima dell’MTF è di ricavare il suo andamento come
rapporto tra l’uscita misurata e l’ingresso dato. Nel dominio di Fourier, infatti, è valida la
seguente relazione:
Eq. 6-33
dove Y(F) è la trasformata di Fourier dell’uscita (l’immagine acquisita), X(F) è la
trasformata di Fourier dell’ingresso ovvero della scena acquisita o dell’immagine sintetica
generata e H(F) è la trasformata di Fourier del sistema il cui modulo è proprio l’MTF da
stimare.
(b)
(c)
(a)
Fig. 6.43: (a) Immagine sintetica originale;
(b) immagine sintetica ricampionata con aggiunta di rumore additivo moltiplicativo;
(c) MTF della psf dell’ipotetico sistema elettro-ottico
124
Dall’Eq. 6.2 è facilmente ricavabile la seguente relazione:
|
|
|
|
|
|
Eq. 6-34
che permette di ottenere la stima dell’MTF come rapporto tra i moduli della trasformata di
Fourier dell’uscita e dell’ingresso. Ecco la ragione di porre un ingresso di forma nota e
semplice qual è un rettangolo stretto rispetto alla frequenza di campionamento. Osservando
l’Eq. 6.3 si evince che la principale difficoltà è quella di ricavare una stima corretta della
funzione |Y(F)|.
Descriviamo adesso in dettaglio la procedura di stima il cui schema a blocchi è riportato in
Fig. 6.34.
Scelta di
una sezione
del rettangolo
Individuazione del
profilo
Modellizzazione
profilo
Campionamento
profilo
FFT
Stima MTF
Modellazione
rect
FFT
Fig. 6.44: Schema a blocchi della procedura di stima dell’MTF.
Il primo blocco operativo compie un’operazione molto semplice: seziona il rettangolo
ovvero individua una specifica riga dell’immagine. Se l’immagine sintetica è priva di rumore
la scelta di una specifica riga è un fattore ininfluente se è affetta da rumore si determina una
specifica occasione di stima.
Nel caso di immagine reale, la scelta delle riga influenza sempre la stima. L’immagine
reale, infatti, è sempre affetta da rumore e, inoltre, l’acquisizione reale presenta ulteriori
fattori di variabilità dovuti ad esempio al movimento del satellite e all’ottica non ideale.
Quest’ultima può dare luogo a fenomeni non modellabili attraverso la sola psf.
Una volta scelta la sezione (riga) del rettangolo, il secondo operativo individua con
risoluzione sub-pixel il profilo. Abbiamo già affermato che ciò è possibile perché esiste un
angolo non nullo ( in questo caso pari a 8º) tra l’impulso spaziale e la direzione across track.
Dopo aver individuato la sezione del rect con risoluzione sub-pixel, si modella
matematicamente il profilo stesso. Avendo ricavato il modello matematico è possibile avere
campioni equi spaziati ai quali applicare l’algoritmo FFT. Dal rapporto tra i coefficienti di
questa FFT e quelli della FFT del rect in ingresso si ottengono i coefficienti della FFT
dell’MTF che sono la stima dell’MTT stessa.
In Fig. 6.45 è riportato il profilo ottenuto in due distinti casi: il primo quando l’ampiezza del
rect in ingresso è pari al passo di campionamento del sistema elettro-ottico simulato il
secondo nel caso in cui il rect si ampio 3 volte la frequenza di campionamento. Osservando la
figura, risulta evidente come nel primo caso il profilo ricavato si avvicini alla risposta
impulsiva del sistema mentre nel secondo la maggiore distanza tra i due edge determina un
andamento diverso. Coerentemente con il modello di rumore adottato si riscontra una
maggiore variabilità sui livelli alti di segnale.
125
(b)
(a)
Fig. 6.45: Profilo per differenti ampiezze del rect: (a) ampiezza 4 (b) ampiezza 12.
Da quanto già esposto è evidente come il blocco di elaborazione maggiormente critico sia
quello che modella il profilo misurato.
Durante la messa a punto della procedura di stima dell’MTF basata su di un singolo edge,
sono stati discussi due distinti modelli per il singolo profilo: il primo ricavato dalla funzione
di Fermi e il secondo basato su di una approssimazione polinomiale dell’erf. Nel caso della
stima dell’MTF utilizzando l’edge è stato dimostrato che il modello basato sull’erf fornisce
sia in presenza che in assenza di rumore una stima maggiormente accurata. Basandosi su
questa evidenza sperimentale già acquisita, si è proceduto a sviluppare in questa seconda
procedura di stima un solo modello basato sulla funzione erf.
Chiaramente la scelta di una specifica funzione analitica come base matematica per il
modello delimita il campo di applicabilità della procedura complessiva così fissata: in altre
parole la procedura così definita è applicabile solo se l’MTF ha forma gaussiana. Purtuttavia
questa è una limitazione accettabile perché in assenza di informazioni più specifiche
sull’MTF lo si suppone gaussiano con valore noto alla frequenza di Nyquist. Qualora siano
disponibili informazioni più specifiche è sufficiente adottare una diversa modellazione
analitica, maggiormente appropriata.
Come già detto il modello adottato nella procedura di stima qui descritta si basa sull’erf e si
fonda su una semplice considerazione. Immaginiamo di decomporre il rect in ingresso nella
somma di due differenti edge (Fig. 6.46). Ponendo in ingresso al sistema ciascun singolo edge
si ottiene una riposta che per quanto dimostrato nel precedente report è possibile modellare
analiticamente basandosi sull’erf. Sfruttando la linearità del sistema la risposta del sistema al
rect di ingresso è data dalla somma delle due risposte precedentemente calcolate che sono
entrambe erf-modellabili. Pertanto è sensato modellare il profilo attraverso una combinazione
di modelli basati entrambi sull’erf.
126
(b)
(a)
(c)
Fig. 6.46: (a)edge sinistro (b) edge destro (c) rect
Come nel caso dell’edge anziché modellare utilizzare direttamente la funzione erf che è
data in forma chiusa attraverso un integrale, si utilizza una sua forma approssimata basata
sulla seguente formula:
1
Eq. 6-35
1
0 ed approssima l’erf con un errore massimo di
Tale formula è però valida solo per
5 · 10 . I valori dei coefficienti sono i seguenti: a1 = 0.278393, a2 = 0.230389, a3 = 0.000972
e a4 = 0.078108. Definiamo adesso le due funzioni analitiche modellanti: La prima
1
2
1
1
2
1
| |
Eq. 6-36
Dove z vale:
Eq. 6-37
E la seconda
1
2
1
1
2
Dove z vale:
127
1
| |
Eq. 6-38
Eq. 6-39
Infine la funzione analitica che modella il nostro profilo è
Eq. 6-40
Il modello adottato è quindi a 8 parametri (a1, a2, b1, b2, c1, c2, d1, d2 ). Una volta definito il
modello, il fitting viene calcolato attraverso una minimizzazione non lineare ai minimi
quadrati utilizzando algoritmo di minimizzazione Levenberg-Marquardt. In
Fig. 6.26 sono riportati l’andamento dei quattro modellizzazioni differenti. In tutti i casi la
modellizzazione adottata fornisce prestazioni ampiamente soddisfacenti.
(a)
(b)
(c)
(d)
Fig. 6.47: Modellizzazione di quattro impulsi differenti : (a) senza rumore e lunghezza 1 (b)
senza rumore e lunghezza 3 (c) con rumore e lunghezza 1 (d) con rumore e lunghezza 3.
6.5.1.3.2 RISULTATI OTTENUTI
Una volta ottenuta l’equazione analitica del profilo, si giunge alla stima dell’MTF
continuando ad elaborare i dati secondo lo schema riportato in Fig. 6.34. Tali operazioni non
presentano difficoltà teoriche ma comportano solo l’attenta considerazione dei problemi
computazionali connessi ai differenti passi di campionamento coinvolti.
128
In Fig. 6.25 e Fig. 6.39 sono riportati i risultati ottenuti. La Fig. 6.25 descrive i risultati
ottenuti elaborando immagini prive di rumore mentre la Fig. 6.39 riporta quelli ottenuti in
presenza di rumore.
Entrambe le figure mostrano risultati ampiamente convincenti.
E’ di particolare rilevanza l’efficacia della stima quando si considera anche il rumore. Questo
fatto è possibile perché il contributo di rumore è quasi interamente filtrato dalla
modellizzazione adottata (
Fig. 6.26). Tale modellizzazione agisce dunque anche come un filtro di denoising.
Osservando inoltre anche i differenti risultati ottenuti nel solo caso di assenza di rumore (Fig.
6.25) si nota come la stima sia efficace sia quando il rettangolo è lungo 1 sia quando è lungo
3. In entrambi i casi, nei tratti nei quali non sono presenti discontinuità, si ha la quasi
coincidenza tra l’uscita modellata e quella misurata. Tali discontinuità, dipendendo dalla
larghezza dell’impulso in ingresso, si collocano a valori differenti di frequenza normalizzata.
Essendo particolarmente interessati al valore di MTF alla frequenza di Nyquist, la scelta di
un rettangolo ampio 2 è da evitarsi in quanto il punto di discontinuità verrebbe proprio a
trovarsi a quel valore di frequenza normalizzata (Fig. 6.41-b) . All’aumentare dell’ampiezza
del rettangolo aumentano i punti di discontinuità rendendo la stima impossibile (Fig. 6.41-d).
E’ importante sottolineare il fatto che quando si aumenta l’ampiezza del rettangolo i due edge
non concorrono più a formare un impulso ma danno luogo risposte indipendenti a ciascuna
delle quali è possibile applicare la metodologia presentata nel precedente report.
Poiché si utilizza un rettangolo leggermente inclinato rispetto alla direzione along track per
ottenere una risoluzione sub-pixel è necessario studiare la robustezza del metodo quando la
psf elettro-ottica non è simmetrica. Si riportano i risultati ottenuti in un caso particolarmente
critico: un MTF across track pari a 0.1 un MTF along track 0.3 e con aggiunto il rumore (Fig.
6.40). Anche in questo caso si ottengono risultati ampiamente soddisfacenti.
(a)
(b)
129
(d)
(c)
Fig. 6.48: Stima in assenza di rumore.
(a) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 1
(b) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 1
(c) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 3
(d) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 3.
(a)
(b)
(c)
(d)
Fig. 6.49: Stima in presenza di rumore.
(a) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 1
(b) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 1
(c) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 3
(d) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 3.
130
(a)
(b)
(c)
(d)
Fig. 6.50: Stima in presenza di rumore.
(a) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 2
(b) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 2
(c) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 8
(d) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 8.
(b)
(a)
Fig. 6.51: Stima in presenza di rumore.
(a) Confronto tra l’uscita misurata e quella modellata quando lunghezza impulso 3
(b) Confronto MTF misurata ed MTF modellata quando lunghezza impulso 3
131
6.5.1.3.3 CONCLUSIONI
I risultati presentati dimostrano che entrambe le metodologie stimano efficacemente l‘MTF
del sistema alla frequenza di Nyquist. Le due metodologie differiscono però per quanto
riguarda l’efficacia nella stima complessiva della curva MTF. L’approccio basato
sull’impulso, infatti, fornisce una curva che intrinsecamente presenta delle discontinuità
legate agli zeri presenti nella trasformata di Fourier dell’ingresso. Tali discontinuità fanno
discostare la curva stimata da quella modellata in tutto un intorno della discontinuità stessa
rendendo in tali tratti la stima non efficace. Al contrario la metodologia basata sull’edge
produce una stima efficace su tutto il range di frequenze normalizzate di interesse. Questa
differenza prestazionale è persistente in tutti gli specifici casi di applicazione. Nel caso di
stima basata sull’impulso è possibile modellare ulteriormente l’MTF ottenuta ricavando così
il corretto andamento anche nei tratti di discontinuità. Ancora una volta, però, sarebbe
necessario ipotizzare un modello per l’MTF stessa. Questo ulteriore possibilità di
elaborazione non viene sviluppata in questo contesto in quanto comporterebbe la risoluzione
di problemi matematici completamente scostati dalla fisica e geometria di acquisizione.
Stando così la comparazione sull’efficacia delle due metodologie, un decisivo criterio
di scelta per la loro rispettiva adozione è la presenza nell’immagine considerata di impulsi
oppure di edge distinti.
6.5.1.4 STIMA MEDIANTE DATI MULTIRISOLUZIONE
Per quanto riguarda la caratterizzazione spaziale e spettrale dei dati si sono integrate le
conoscenze del gruppo con un'analisi dei metodi e dei risultati presentati in letteratura,
focalizzando l'attività sulla stima della MTF di sistema in sensori ad alta risoluzione spaziale
per i quali esiste una casistica relativamente ampia. Si è verificato che esiste una certa
discrepanza sui risultati riportati dai vari ricercatori che sembrano ignorare gli effetti di
aliasing prodotto in acquisizione e che non considerano esplicitamente gli effetti legati
all'angolo di elevazione del sensore al momento dell'acquisizione. Si è valutato
preliminarmente la possibilità di stimare la MTF avendo a disposizione un’immagine
multispettrale e una pancromatica a più alta risoluzione della stessa scena secondo lo schema
riportato in Fig. 6.52. La MTF viene modellata attraverso una funzione Gaussiana costruita
imponendo il valore di cut-off alla frequenza di Nyquist. Si applica la MTF all'immagine
pancromatica e si decima di un fattore 4 per riportarsi alla scala dell'immagine multispettrale
generando quindi un'immagine pancromatica aliasata. Si esegue quindi una misura di
similitudine fra ciascuna banda dell'immagine multispettrale originale e l'immagine pan
aliasata. La misura viene ripetuta al variare del valore di cut-off alla frequenza di Nyquist. Per
ogni banda, il valore di cut-off alla frequenza di Nyquist che massimizza la misura di
similitutine identifica la MTF di detta banda. Il metodo, concettualmente semplice, ha il
pregio di compensare l'aliasing presente nell'immagine multispettrale e che altererebbe la
misura se ignorato.
132
Fig. 6.52: Stima dell' MTF. L'effetto di aliasing è simulato filtrando e decimando l'immagine Pan.
Viene quindi misurata la similitudine con le bande multispettrali.
Alcuni risultati preliminari su sensori IKONOS e QuickBird sono stati ritenuti
incoraggianti. E' allo studio un approccio alternativo originale che utilizza gli algoritmi di
fusione per stimare l'MTF.
I dati analizzati si riferiscono ad una immagine IKONOS dell'area di Tolosa. La fig. 7.22
riporta l'andamento della correlazione fra MS e pancromatico aliasato al variare del valore di
cut-off alla frequenza di Nyquist. Il massimo identifica il valore di cut-off (e quindi la MTF)
che rende più simile ciascuna banda MS al pancromatico aliasato. Tale MTF è
presumibilmente la più simile a quella che ha generato l'immagine MS al momento
dell'acquisizione. I valori trovati per i cut-off alla frequenza di Nyquist sono plausibili anche
se presumibilmente sovrastimati. Il proseguo dell'analisi verificherà la procedura controllando
in particolare il tipo di elaborazione di cui è stata oggetto l'immagine IKONOS. Infatti per
l'applicazione di tale metodo le immagini MS e Pan non devono aver subito alterazioni (ad es.
correzioni geometriche) che possano distorcere il contenuto spaziale delle immagini.
Il metodo verrà quindi messo a confronto con altri metodi di misura e verificato per altri
tipo di sensore.
133
Fig. 6.53: Andamento della correlazione fra MS e PAN al variare del valore di cut-off alla
frequenza di Nyquist. I valori dei massimi sono 0.315 per la banda del blu, 0.36 per il verde, 0,325
per il rosso e 0.45 per l'infrarosso.
134
6.6 PRODOTTO “FUSIONE IMMAGINI
IPERSPETTRALI”
Durante le riunioni di avanzamento del progetto è stato posto il problema di valutare se dal
punto di vista della fusione delle immagini iperspettrali con l'immagine pancromatica sia più
conveniente avere a disposizione un'immagine pancromatica a banda larga o a banda stretta.
A tale scopo, si è precedentemete simulato la fusione di immagini iperspettrali con due
pancromatici simulati con banda spettrale diversa.
In seguito, per fornire soluzioni più avanzate rispetto a quelle già descritte in letteratura,
abbiamo condotto una studio con finalità prevalentemente conoscitive e di indagine sul
pansharpening iperspettrale.
Lo studio si è articolato in due distinte parti entrambe sperimentate utilizzando i dati prodotti
dal sensore SIM-GA sviluppato da Selex ES. Essendo stato progressivamente migliorato,
attualmente lo strumento si presenta dotato anche di una camera pancromatica. Le sue
caratteristiche principali sono riportate in Tab. 6-5. Da detta tabella si evince che le risoluzioni
dei tre sensori sono in rapporto di circa 3. In ogni caso, per questa sperimentazione, i rapporti
tra i differenti intervalli spaziali di campionamenti sono stati posti proprio uguale a 3
attraverso le necessarie operazioni di resampling.
Il pansharpening, come lo stesso nome dice, aumenta la risoluzione spaziale di una sequenza
multi/iperspettrale utilizzando l’informazione contenuta in un’unica banda, il pancromatico
appunto. La particolare configurazione dello strumento SIM-GA consente però anche
un’impostazione diversa e innovativa. Focalizzandosi sulle caratteristiche dei sensori SWIR e
VNIR, è possibile iniziare a pensare in termini di hyper-sharpening. Con questa nuova
espressione vogliamo indicare la metodologia che consente di innalzare la risoluzione spaziale
di una sequenza multi/iper spettrale attraverso l’utilizzo di un’ulteriore sequenza multi o
iperspettrale. In questo specifico caso si può compiere un’operazione di hyper-sharpening
sulla sequenza SWIR utilizzando come sorgente delle informazioni spaziali la sequenza
VNIR, ottenendo come risultato finale una sequenza SWIR fusa a 0.5 m. Il fatto che le due
sequenze coprano range spettrali diversi richiede però una specifica messa a punto.
L’approccio tradizionale, al contrario, riduce alla risoluzione spaziale di 0.5 m il
pancromatico acquisito e successivamente applica le metodologie già note.
L’approccio hyper-sharpening, per ora applicato unicamente al caso concreto appena
descritto, è, o vuole essere, anche una prospettiva di sviluppo per successivi strumenti.
Riteniamo infatti, che sia di stimolo chiedersi quali vantaggi recherebbe l’aver disponibile
sequenze multi/iperspettrali a differenti risoluzioni spaziali così da poter effettuare una
fusione hyper-sharpening. In altre parole può essere una prospettiva concreta di sviluppo
quella di sostituire al pancromatico un’ulteriore sequenza multi/iperspettrale? E quanto la
cardinalità di questa sequenza inciderebbe sul risultato finale? Per iniziare a valutare ciò
abbiamo condotto anche una sperimentazione utilizzando la sola sequenza VNIR prodotta dal
sensore SIM-GA.
Tab. 6-5: Sintesi delle principali caratteristiche del sensore SIM-GA
135
6.6.1 DESCRIZIONE
6.6.1.1 Fusione di immagini iperspettrali con due pancromatici
simulati con banda spettrale diversa
L'attività si è sviluppata a partire dalle evidenze scientifiche già acquisite per
approfondirne ulteriormente le problematiche e le potenzialità.1 2
Il pansharpening comprende una famiglia di metodologie volte a migliorare la risoluzione
spaziale di una sequenza iperspettrale (multispettrale) utilizzando l’alta risoluzione spaziale
del pancromatico associato. Lo studio ha innanzitutto valutato l’opportunità di continuare ad
utilizzare sequenze acquisite dai sensori Hyperion-ALI, ovvero se confermare le scelte
compiute nei due riferimenti citati. Analizzando le sequenze precedentemente utilizzate, è
però emerso che le immagini acquisite dai due sensori presentavano pronunciati e aleatori
disallineamenti geometrici locali che influivano sulla variabilità dei risultati. Per evitare che
l'interpretazione deii risultati risentisse di questo fatto si è deciso di utilizzare in questa
sperimentazione solo dei dati simulati che sono stati ricavati a partire da una sequenza del
sensore Hyperion (le cui caratteristiche sono riportate in Fig. 6.54-a) eseguendo un down
sampling alla risoluzione 180 m e sintetizzando alla risoluzione originale (30 m) due
pancromatici, il primo a banda larga ed il secondo a banda stretta.
Hyperion
Tipo
Push-broom
Campo di vista
7,5 km
3
Risoluzione spaziale
0m
Numero di bande
220
Intervallo spettrale
da 0,4µm a 2,5 µm
Risoluzione spettrale
10 nm
SNR
> 100
Quantizzazione
12 bits
(a)
(b)
(c)
Fig. 6.54: (a) Caratteristiche sensore Hyperion; (b) lunghezza d’onda delle bande VNIR,
Red, Green, Blue. (c) forme con cui sono pesati i contributi alle varie lunghezze d’onda in
relazione al pancromatico del satellite WorldView-2
Le forme con le quali sono stati pesati i contributi alle varie lunghezze d’onda sono
riportati nella Fig. 6.54-b e Fig. 6.54-c. La Fig. 6.54-b mostra inoltre le lunghezze d’onda
delle bande VNIR, Red, Green e Blue che sono successivamente utilizzate per il confronto
visivo. La Fig. 6.54-c riporta anche le risposte spettrali del pancromatico e del multispettrale
ad otto bande del sensore da satellite WolrdView-2 lanciato in orbita nel 2009. Volutamente,
le forme di sintesi seguono parzialmente quella del pancromatico di WorldView-2.
Con tale dataset a disposizione è stato dunque possibile sperimentare le differenti
metodologie di pansharpening iperspettrale con fattore 6 tra le due risoluzioni.
1
S. Baronti, B. Aiazzi, L. Alparone, A. Garzelli, M. Selva “Hyperspectral image fusion” Proc. ESA
Hyperspectral Workshop 2010, from CHRIS/Proba to PRISMA & EnMAP and beyond, ESA ESRIN, Frascati,
Rome, Italy, 17-19 Mar. 2010, ESA Special Publication SP-683, May 2010.
2
Garzelli, L. Capobianco, L. Alparone, B. Aiazzi, S. Baronti, M. Selva “Hyperspectral pansharpening based
on modulation of pixel spectra” Proc. WHISPERS 2010, 2nd Workshop on Hyperspectral Image and Signal
Processing: Evolution in Remote Sensing, Reykjavik, Iceland, 14-16 Jun. 2010.
136
Per ciascun pancromatico sintetizzato sono state applicate due distinte metodologie di
pansharpening: una appartenente alla famiglia MRA (Multi Resolution Analysis) e l’altra alla
famiglia CS (Component Substitution). Le due famiglie di metodi, basandosi sui due
differenti schemi di sintesi adottabili, sono rappresentative della maggior parte dei metodi di
pansharpening. I due algoritmi scelti e sviluppati da IFAC-CNR hanno sempre dato ottimi
risultati nelle prove comparative riportate in letteratura.
Essendo possibile che i risultati della metodologia CS avessero anche una dipendenza
legata al numero di bande della sequenza iperspettrale elaborata, è stata anche sperimentata
una sotto sequenza composta da 62 bande nel range di frequenze visibile - vicino infrarosso.
La disponibilità della sequenza originale ha permesso di compiere sia la valutazione visiva
sia quella quantitativa. Come parametro quantitativo è stato adottato l’RMSE (Root Mean
Square Error) calcolato fra ciascuna banda fusa e la banda originale corrispondente. In Fig.
6.56 sono riportati i risultati così ottenuti. Fig. 6.56-a sono riportati i risultati relativi alla
sequenza ridotta (range di frequenze visibile-vicino infrarosso) e in Fig. 6.56-b quelli relativi
all’intera sequenza.
Per spiegare le due figure è necessario dare alcuni riferimenti. Innanzitutto, la linea
verticale marrone chiaro separa le lunghezze d’onda acquisite dal primo spettrometro da
quelle acquisite dal secondo. La sequenza Hyperion, infatti, non è acquisita da una solo
spettrometro ma bensì da due. I rettangoli celeste e blu presenti in alto a sinistra rappresentano
graficamente l’estensione spettrale dei due pancromatici utilizzati: quello blu si riferisce al
pancromatico stretto mentre quello azzurro al pancromatico largo. Ciascun grafico riporta
cinque andamenti distinti: i risultati ottenuti dalle quattro sperimentazioni e quelli ottenuti
calcolando RMSE tra la sequenza originale a 30 m e la relativa sequenza alla risoluzione 180
m espansa alla scala 30 m. Quest’ultimo caso corrisponde all’assenza di qualunque
operazione di pansharpening.
Osservando le due figure sono però visibili solo tre curve e non cinque. La ragione di ciò è
nel fatto che, per ciascun pancromatico sperimentato la metodologia MRA e quella CS
forniscono quasi esattamente gli stessi risultati. Per tale ragione la curva blu si sovrappone
perfettamente a quella marrone e la curva rosa a quella azzurra. Questo fatto era già stato
ampiamente riscontrato nel caso di pansharpening multispettrale ma non era da ritenersi
scontato nel caso iperspettrale. Tra i fattori che lo hanno determinato sono da includersi
l’attenta esclusione delle bande nulle e di quelle rumorose che sono presenti sia ai margini
della sequenza sia nella zona di transizione tra i due spettrometri. Comparando la Fig. 6.56-a
con la Fig. 6.56-b si nota che gli andamenti sono rispettivamente uguali nel range di frequenze
in cui il confronto è possibile.
(a)
(b)
Fig. 6.55: RMSE con le tecniche di pansharpening iperspettrale: (a) sottoinsieme di
bande, (b) di tutta la sequenza.
Dunque la differenza nella composizione delle due sequenze non influisce sui risultati
ottenuti. La ragione di ciò è che le bande che sono presenti solo nella sequenza completa non
contribuiscono alla sintesi di nessuno dei due pancromatici. Per tale ragione, possiamo
soffermarsi sulla sola Fig. 6.55-b. Come era logico attendersi tutti i risultati ottenuti sono
migliori di quelli ottenuti in assenza di pansharpening (etichetta Exp). Dallo studio
137
comparativo degli andamenti emerge un altro fatto importante. In corrispondenza della fine
del pancromatico stretto, la sequenza fusa a partire proprio dal pancromatico stretto presenta
un forte aumento dell’errore tanto da portarsi sopra a quella ottenuta utilizzando il
pancromatico largo. Infatti il contributo delle bande SWIR alla sintesi del pancromatico stesso
è poco significativo; per tale ragione l’errore misurato nel range del vicino infrarosso non può
che aumentare rispetto a quello ottenuto utilizzando il pancromatico largo. Parallelamente,
però, l’uso del pancromatico largo, sintetizzato utilizzando un range spettrale più ampio,
determina anche l’errore più elevato nel visibile. Tutto questo ha un preciso riscontro visivo
(Fig. 6.56). Nella Fig. 6.56-a sono riportati i risultati ottenuti montando, in accordo con la Fig.
6.54-b, le bande di interesse in modalità RGB. Coerentemente con gli andamenti della Fig.
6.55-b, l’operazione di pansharpening col pancromatico stretto fornisce risultati nettamente
migliori. Al contrario, montando le opportune bande in modalità falso colore (Fig. 6.56-b) si
riscontra una migliore fedeltà nell’immagine prodotta col pancromatico largo coerentemente
col fatto che la banda dell’infrarosso utilizzata si trova proprio al margine delle frequenze
incluse nel calcolo del pancromatico largo.
Riassumendo, questo studio sul pansharpening iperspettrale presenta aspetti innovativi
nella formulazione in quanto ha utilizzato dati simulati. La sperimentazioni compiute hanno
trattato in maniera appropriata le tipologie di pansharpening allo stadio dell’arte. Le evidenze
sperimentali numeriche hanno riscontrato alcuni fatti già noti (pansharpening multispettrale)
quali la quasi coincidenza di risultati tra MRA e CS un netto divario prestazionale tra ciascun
metodo pansharpening e il caso dell’espansa. Le sperimentazioni condotte hanno messo per la
prima volta in evidenza, attraverso sia un’analisi quantitativa che qualitativa, le implicazioni
sui risultati ottenibili in dipendenza dall’utilizzo di un pancromatico a banda più o meno larga.
(a)
(b)
Fig. 6.56: Confronto visivo tra i risultati del pansharpening iperspettrale. (a) Modalità
RGB(b) Modalità Falso Colore.
L'analisi prodotta alla risoluzione di 30-180m sarà più efficacemente riproposta sui dati
simulati di PRISMA alla risoluzione 5-30m.
6.6.1.2 Hyper-sharpening SWIR-VNIR
Lo scopo di questa sperimentazione è di valutare l’efficacia dell’approccio hypersharpening nell’ottenere una sequenza SWIR alla risoluzione spaziale di 0.5 m, partendo dalla
sequenza SWIR a 1.5 m e utilizzando come sorgente dell’informazione spaziale il VNIR a 0.5
m. Questo innovativo approccio è inoltre confrontato con quello tradizionale implementato
impiegando sia il pancromatico realmente disponibile sia altri sintetizzati a partire dalla
138
medesima sequenza VNIR. In questo modo è possibile, tra l’altro, valutare l’effetto di
ulteriori fattori, quali, ad esempio, l’MTF, sulle prestazioni di ciascuno dei due approcci.
Per poter applicare l’approccio hyper-sharpening è necessario prima di tutto definire come
utilizzare le 512 bande VNIR. Il criterio scelto consiste nell’adottare, per ciascuna banda
dello SWIR, come pancromatico la banda VNIR avente il valore dell’indice di correlazione
più elevato. Tali indici di correlazione sono calcolati alla risoluzione spaziale di 1.5 m. In Fig.
6.57(a) è riportata la matrice di correlazione tra lo SWIR e il VNIR. I punti neri indicano, per
ciascuna banda SWIR, la banda VNIR avente la correlazione massima.
L’approccio tradizionale, come già detto, è stato declinato in differenti varianti a seconda
del pancromatico utilizzato. Oltre al pancromatico reale ridotto alla risoluzione di 1.5, ne sono
stati utilizzati altri 3 sintetici, la cui la cui risposta spettrale è riportata in Fig. 6.63(b). Il
pancromatico etichettato “Simulated-Original-Pan” ha la risposta spettrale simile a quella
dello strumento montato su SIM-GA. Gli altri due, invece, sono da considerarsi l’uno a banda
larga (“Wide-Pan”) e l’altro a banda stretta (“Narrow-Pan”). La risposta spettrale di NarrowPan esclude le lunghezze d’onda più lunghe del VNIR mentre Wide-Pan le include.
Osservando la Fig. 6.57 (b), si nota che le lunghezze d’onda più lunghe del VNIR sono però
quelle più correlate con la prima parte dello spettro SWIR. Questo fatto condiziona
fortemente i risultati ottenibili con i due differenti pancromatici.
Gli approcci ora descritti sono stati implementati utilizzando due differenti metodologie di
pansharpening; la prima è basata sulla piramide laplaciana generalizzata (GLP) e la seconda è
una versione adattiva (GSA) del metodo Gram-Schmidt. Questi due metodi sono state scelti
perché sono le più efficaci tecniche delle due famiglie nelle quali possono essere raggruppati
gli algoritmi di pansharpening. La prima famiglia, quella di cui fa parte il GLP, ricava il
dettaglio come differenza tra il pancromatico e una sua versione filtrata, la seconda, alla quale
appartiene il GSA, come differenza tra il pancromatico e una immagine ricavata a partire dal
multispettrale espanso.
Dato che non è ovviamente disponibile una sequenza SWIR a risoluzione 0.5 m con cui
confrontare ciascun risultato della fusione, tutte le sequenze vengono ridotte spazialmente di
un ulteriore fattore 3 in modo da poter utilizzare la sequenza originale SWIR come
riferimento. In questo modo disponiamo di due insiemi di elaborazioni: il primo a scala piena
(da 1.5 m a 0.5 m) che viene valutato attraverso un confronto visivo tra le varie immagini
prodotte, il secondo (da 4.5 m a 1.5 m) per il quale è possibile adottare la valutazione
quantitativa.
Riportiamo e discutiamo prima i risultati numerici ovvero quelli ottenuti applicando la fusione
tra 4.5 m e 1.5 m. In Fig. 6.58 (a) sono riportati i valori di correlazione tra ciascuna banda
SWIR e il pancromatico adottato, mentre in Fig. 6.58 (b) vengono visualizzati i valori di
RMSE ottenuti dai differenti approcci di fusione. Tali valori sono normalizzati per la media di
ciascuna banda.
139
Un importante riscontro a quanto sinora ipotizzato emerge osservando che, per ciascuna
banda, il valore di correlazione più alto lo ottiene proprio l’approccio hyper-sharpening. Per
questa stessa ragione ottiene anche i migliori risultati di fusione. Un’ulteriore considerazione
importante emerge comparando i risultati ottenuti da Wide-Pan e Narrow-Pan. Per come sono
costruite le risposte spettrali di questi due pancromatici non deve sorprendere il fatto che per
lunghezze d’onda più corte le migliori prestazioni siano raggiunte da Wide-Pan mentre, al
contrario, per le lunghezze d’onda più lunghe, sia migliore Narrow-Pan. Gli indici di qualità
globali (SAM ed ERGAS) riportati in Tab. 6-6 confermano che il migliore approccio è quello
hyper-sharpening. Le ultime due colonne, inoltre, dimostrano quanto l’approccio adattivo
migliori la metodologia Gram-Schmidt implementata in ENVI-IDL.
(a)
(b)
Fig. 6.57: Matrice di correlazione SWIR – VNIR (a)
Risposte spettrali dei vari pancromatici sintetici utilizzati (b);
(a)
(b)
Fig. 6.58: Valori di correlazione tra ciascuna banda SWIR e il pancromatico adottato (a);
RMSE normalizzato per la media di ciascuna banda SWIR (b);
Tab. 6-6: Distorsione spettrale (SAM) e radiometrica (ERGAS) tra le sequenze fuse e il
riferimento a 1.5 m.
140
Analizziamo adesso i risultati a piena scala così come riportati in Fig. 6.59 e Fig. 6.60.
Le immagini RGB sono ottenute scegliendo le seguenti lunghezze d’onda: 1071.75 nm per il
canale del rosso, 1647.60 nm for il canale del verde e 2191.54 nm per il canale del blu. In
queste figure l’etichetta “Original Pan” indica il pancromatico originale ridotto alla scala di
0.5 m. Dove non espressamente indicato, tutte le immagini fuse sono state ottenute applicando
il metodo GLP.
Un prima importante osservazione riguarda la Fig. 6.60 (a) dove è riportato il pancromatico
utilizzato nell’approccio hyper-sharpening. Coerentemente con quanto già esposto, tale
pancromatico non è un’immagine monocromatica ma bensì a colori; si sta infatti utilizzando
una differente banda VNIR per ciascuna banda SWIR. I suoi colori, inoltre, sono in buon
accordo con l’immagine SWIR espansa rappresenta in Fig. 6.59Error! Reference source not
found.(a).
Andiamo ora ad analizzare i risultati della fusione. Una prima considerazione scaturisce
osservando la Fig. 6.60 Error! Reference source not found.(b) e la Fig. 6.60 (h). Nella
prima figura è visualizzata l’immagine fusa utilizzando l’approccio hyper-sharpening, nella
seconda quella utilizzando il pancromatico originale. Si riscontra che la seconda è assai più
contrastata della prima, fatto che potrebbe far concludere che l’approccio hyper-sharpening
non sia la soluzione più efficace a piena risoluzione. Confrontando, però, la Fig. 6.60 (g) e la
Fig. 6.59 (b) e nelle quali sono riportati rispettivamente il pancromatico originale e quello
sintetico ricavato con una risposta spettrale simile e a quella dello strumento reale, è evidente
che il livello di dettaglio del pancromatico originale è maggiore di quello presente
nell’immagine sintetizzata.
Expanded
(a)
Simulated Original Pan
GS-ENVI Original Pan
(b)
(c)
Fig. 6.59: Immagine SWIR espansa (a); Pan simulato sulle caratteristiche spettrali di
quello originale (b); GS-ENVI utilizzando il pancromatico originale (c).
141
Selected Band
Pansharpened Selected Band
(a)
(b)
Narrow Pan
Pansharpened Narrow Pan
(c)
(d)
Wide Pan
Pansharpened Wide Pan
(e)
(f)
Original Pan
Pansharpened Original Pan
(g)
(h)
Fig. 6.60: Dettagli di ciascun pancromatico adottato e relativa immagine fusa.
142
Poiché la risposta spettrale è, come già detto, molto simile, tale differenza non può che
dipendere dalle caratteristiche di MTF del sensore VNIR. Poiché il pancromatico originale
viene ridotto alla risoluzione 0.5 m attraverso un filtro polinomiale dispari a 23 coefficienti,
filtro quest’ultimo che può essere considerato una valida approssimazione di quello ideale,
l’MTF del sensore VNIR deve avere un valore a Nyquist assai basso tale da giustificare
appunto la minore presenza di alte frequenze spaziali nel pancromatico sintetizzato. Quindi
possiamo concludere che l’immagine fusa dall’approccio hyper-sharpening è meno
contrastata non per intrinseca debolezza dell’approccio stesso ma per effetto di una causa
indipendente ad esso esterna. Senza questo inconveniente sarebbe anche risultata più evidente
la maggiore fedeltà spettrale conseguita dall’approccio hyper-sharpening.
Se si confronta l’approccio hyper-sharpening con quello tradizionale implementato
utilizzando i due pancromatici sintetici Wide-Pan e Narrow-Pan, effettuando quindi una
comparazione tra risultati su cui l’influenza dell’MTF dello spettrometro è la stessa, si
evidenzia che l’approccio hyper-sharpening produce l’immagine più contrastata. Inoltre,
Wide-Pan è più contrastata di Narrow-Pan.
Anche per la piena scala, il metodo Gram-Schmidt implementato in ENVI-IDL fornisce
prestazioni non soddisfacenti (Fig. 6.59 (c)). Pur avendo l’immagine un livello di dettaglio
valido, presenta colori alterati. L’asfalto, infatti, risulta più chiaro e alcuni tetti virano verso il
verde. Anche il confronto tra gli spettri riportato in Fig. 6.61 conferma questo risultato. Da
notare inoltre che l’approccio hyper-sharpening è indistinguibile dall’originale.
Asfalto
Tetto
(a)
(b)
Fig. 6.61: Comparazione di spettri tra differenti metodi di fusione e l’originale
143
6.6.1.3 Hyper-sharpening simulato VNIR
Questa simulazione di hyper-sharpening nel solo range spettrale VNIR ha l’obbiettivo di
fornire una prima valutazione dei vantaggi che un tale approccio potrebbe comportare. In
questo contesto l’approccio hyper-sharpening ha alla base la semplice ipotesi che la fusione
darà risultati tanto migliori tanto più ciascuna banda rappresentativa del pancromatico avrà un
range spettrale comparabile con quella di cui si vuole aumentare la risoluzione spaziale. In
altre parole è corretto supporre che all’aumentare del range spettrale, diminuendo la
correlazione con la banda da fondere, diminuisca anche l’efficacia dell’operazione di fusione
stessa. Essendo questa una semplice ipotesi, è stata necessaria la sua verifica attraverso
un’apposita sperimentazione.
Sono state dunque generate differenti sequenze da utilizzare come sorgente dell’alta
risoluzione spaziale nel processo di hyper-sharpening. Ogni sequenza è caratterizzata da un
diverso numero di bande. Il range spettrale coperto da ciascuna sequenza è sempre lo stesso
(l’intero VNIR) ma all’aumentare del numero di bande diminuisce il range spettrale che ogni
banda copre. Sono stati evitati sovrapposizioni di range spettrali. Per le caratteristiche appena
enunciate, la sequenza costituita da un’unica banda sarà da considerarsi effettivamente un
pancromatico avente l’intero VNIR come range spettrale. Quando la sequenza è costituita da
due sole bande ciascuna banda ha un range spettrale pari alla metà del VNIR; per quella con
quattro bande ciascuna di essa sarà ¼ del range spettrale del VNIR e così via fino al caso di
avere come banda pancromatica la stessa banda da fondere seppure con risoluzione spaziale
diversa.
Per avere a disposizione il riferimento, le differenti fusioni sono state tutte effettuate tra la
risoluzione di 3 m e 0.5 m. Si è adottato un fattore di scala 6 per simulare in questo aspetto le
caratteristiche dello strumento PRISMA. Tutte le sperimentazioni compiute sono state portate
avanti utilizzando il metodo GLP. In Fig. 6.62 sono visualizzati i risultati ottenuti. Ciascuna
etichetta presente nella Fig. 6.62 indica il numero di bande presenti nella sequenza utilizzata
come sorgente per l’alta risoluzione spaziale.
L’ipotesi formulata è confermata dalle evidenze sperimentali. Il maggiore errore si ha quando
si utilizza una sola banda. Già con due bande si ha una consistente riduzione dell’errore.
L’entità di tale riduzione si smorza all’aumentare delle bande giungendo a zero quando vi è la
coincidenza tra la banda da fondere e quella facente le veci del pancromatico (512 bande
“pancromatiche”). Le discontinuità presenti nell’andamento dell’errore sono dovute al fatto
che i range spettrali coperti dalle varie bande “pancromatiche” sono disgiunti. Tali
discontinuità si presentano infatti in corrispondenza del cambio di range spettrale.
Questo studio apre già interessanti spunti di discussione sulla mediazione progettuale che si
può compiere tra le difficoltà realizzative legate all’aumento delle bande “pancromatiche”,
mole dei dati da trasmettere e aumento dell’efficacia del pansharpening a questo punto mutato
in hyper-sharpening. Di particolare rilievo è la riduzione dell’errore quando si aumenta il
numero delle bande da una a quattro, nel passaggio cioè da un pancromatico ad una sequenza
multispettrale consueta. Proprio l’essere già ampiamente conosciuta e realizzata ne dovrebbe
favorire l’adozione anche in questo contesto.
144
Fig. 6.62: RMSE normalizzato applicando l’hyper-sharpening con sequenze dalle
differenti caratteristiche spettrali usate come “pancromatico”.
145
6.7 PRODOTTO “RIDUZIONE DELLA
DIMENSIONALITÀ”
Con "riduzione della dimensionalità" può essere considerato come il processo di estrazione
di particolari feature dai dati iperspettrali. Questocomporta in taluni casi l’analisi e
l’elaborazione su base statistica dell’intera scena. Il processing dell’intera scena e quindi di un
volume di dati spesso considerevole, deve tenere in considerazione due caratteristiche
generali del dato iperspettrale. Ogni banda della sequenza è correlata con quelle contigue
spettralmente e per tale ragione il suo contenuto informativo non è la semplice variabilità non
legata al rumore ma una sua frazione a volte assai piccola. L’altra caratteristica è la presenza
del rumore. Quest’ultima determina una variabilità dipendente dalle caratteristiche
dell’apparato di ripresa utilizzato che altera quella legata alle proprietà fisiche della scena
osservata. Com’è facile intuire detta variabilità influisce negativamente sul processo di
estrazione delle feature ed è pertanto auspicabile che sia correttamente misurata e i suoi effetti
per quanto possibile minimizzati. Nel paragrafo che segue si intende mostrare come una
corretta impostazione sul modello del rumore possa portare a dei vantaggi significativi nelle
procedure di estrazione di feature e possa prevenire in taluni casi anche degli errori.
6.7.1 DESCRIZIONE
La metodologia MNF (Maximum Noise Fraction) è una precedura tipicamente adottata per
ridurre la dimensionalità dei dati. In estrema sintesi, questa procedura esegue una stima della
matrice del rumore e due successive trasformazioni PCA in modo tale che nel dominio
trasformato le componenti MNF siano ordinate per SNR decrescenti. Anti-trasformando una
prima parte della sequenza, scegliendo cioè le componenti fino ad un fissato valore di SNR, si
può ottenere una sequenza iperspettrale con tutta l’informazione legata alla scena ripresa e
poca variabilità legata al rumore. La procedura MNF è implementata in ENVI/IDL.
L’efficacia della procedura consiste nell’ordinare le bande per SNR decrescenti, ed è legata
però alla corretta stima della matrice di covarianza del rumore. La sperimentazione che
abbiamo condotto ne ha verificato l’efficacia in presenza di un rumore additivo-moltiplicativo
dipendente dal segnale. La
Fig. 6.63 riassume efficacemente una parte della sperimentazione condotta. La sequenza
iperspettrale di test è stata acquisita dal sensore Hyper-SIMGA di Selex Galileo. Nel caso a) è
stata applicata la procedura MNF all’intera sequenza, sono state selezionate cinque
componenti, anti trasformate e misurato l'RMSE tra le bande così ottenute e la sequenza
originale. Nel caso b) l’MNF è stata applicata fornendo in ingresso anche la distribuzione del
rumore, quest’ultima individuata traendo vantaggio dalla procedura di stima già menzionata.
Tranne questa specificità la catena di elaborazione è analoga al caso a). Confrontando i due
andamenti emerge chiaramente un RMSE nettamente maggiore nel caso a). Tale andamento
ha inoltre lo stesso profilo della radianza media. Il caso b) ha invece un andamento
notevolmente più basso e piatto. Si deduce che nel caso a) siano state escluse dalla
ricostruzione anche componenti di segnale significative in quanto considerate erroneamente
rumore. La stima di rumore, infatti,è un’operazione complessa che presenta aspetti assai
critici sia nella definizione del modello sia nell’individuazione delle zone omogenee sulle
quali effettuare la stima.
Desta una certa perplessità il fatto che nulla di tutto ciò emerge nella documentazione della
procedura implementata in ENVI/IDL. Oltretutto la spiegazione scientifica di detta
implementazione è in articolo di veramente difficile reperimento. In sintesi l’attività fin qui
svolta ha posto l’accento sulle criticità dell’uso della MNF dell’implementazione ENVI/IDL
ponendo al contempo le basi per un loro superamento fatto che consentirà un miglioramento
146
delle prestazioni di differenti metodologie per l’estrazione di feature già utilizzate in contesti
applicativi.
Fig. 6.63: RMSE ottenuto dalla ricostruzione dell’intera sequenza a partire da 5
componenti MNF: (a) Stima rumore in MNFe (b) stima del rumore con l’algoritmo
parzialmente sviluppato in questo progetto.
147
6.8 PRODOTTO “VALUTAZIONE DELLE
POTENZIALITA’ APPLICATIVE PER I PROCESSI
AMBIENTALI”
6.8.1 OBIETTIVI ATTIVITA’
L’obiettivo generale dell’attività del WP 600 è finalizzato alla la caratterizzazione e
valutazione delle potenzialità applicative delle immagini iperspettrali acquisite da sensori
aerosatellitari, ai fini di evidenziarne sia vantaggi e limiti, che gli aspetti innovativi e/o
complementari rispetto all’impiego dei sensori multispettrali tradizionali a banda larga.
Tra tutte le possibili tematiche ambientali, si è preferito rivolgere l’attenzione ai fenomeni
ed ai processi inerenti i rischi, data la loro sempre crescente attualità di interesse sociale; in
particolare l’attività si è rivolta allo studio delle aree vegetate percorse da incendio ed alla
valutazione dello stato di umidità superficiale. Infatti, se da un lato il fenomeno degli incendi
boschivi e più in generale delle aree vegetate interessate da incendio rappresenta uno tra i
fenomeni naturali di maggior interesse a causa dell’impatto che essi hanno sia a piccola e
media scala sugli ecosistemi naturali che sul clima a mesoscala, dall’altro lato, l’umidità del
suolo, anche se valutata in superficie, rappresenta una tra le più importanti variabili ambientali
che interagisce nell’ambito della maggior parte dei fenomeni e processi naturali, tra i quali
anche i fenomeni franosi. L’attività di studio e di sperimentazione, pur partendo dalla stessa
base informativa rappresentata dal dato iperspettrale, è dunque suddivisa in due linee rivolte
alle due suddette tematiche. Alcune considerazioni preliminari relative all’impostazione
metodologica ed alla caratterizzazione del dato sono però comuni ai due argomenti, ed
essendo preliminari allo studio delle applicazioni, vengono esposte inizialmente in una parte
comune alle due linee. Successivamente, vengono esposte separatamente le considerazioni e
le prove sperimentali relative allo studio, la sperimentazione e la messa a punto di
metodologie volte rispettivamente al monitoraggio delle aree interessate da incendi naturali ed
alla stima dello stato di umidità superficiale, entrambe basate sull’impiego di dati da sensori
aereospaziali iper- e multi-spettrali.
6.8.2 APPROCCIO METODOLOGICO
Lo studio delle potenzialità del telerilevamento applicato a determinati fenomeni
ambientali, se da un lato non può prescindere dall’analisi dei principi fisici sui quali tali
fenomeni si basano e dalla conoscenza degli eventuali modelli sviluppati, dall’altra non può
fare a meno di disporre di adeguate informazioni, in termini di dati ancillari e soprattutto di
misure di riferimento accurate e validate, da impiegare come elementi di correlazione (es.
verità a terra) per la messa a punto dei metodi di stima e di monitoraggio.
Spesso, nel settore della ricerca relativo allo sviluppo delle tecniche applicative di
telerilevamento, l’elemento che più spesso è carente è proprio la disponibilità di “dati e
misure di verità” da potere utilizzare per interpretare e calibrare l’informazione delle misure
aerosatellitari.
Poiché nell’ambito di questo progetto di ricerca non è stata prevista la programmazione e
lo svolgimento di adeguate campagne al suolo relativamente alla misura e/o verifica delle
svariate variabili biofisiche e geofisiche ambientali direttamente coinvolte nelle tematiche di
studio, per valutare l’informazione iperspettrale si è dovuto procedere adottando un approccio
metodologico “multi-sensore”.
148
Come “informazione di riferimento” sono state infatti impiegate immagini multispettrali
acquisite da differenti sensori multispettrali a banda larga, quali ALI e TM/ETM+, che hanno
caratteristiche di risoluzione spaziale, intervallo spettrale, nonché situazione geometrica di
acquisizione, congruenti o per lo meno facilmente relazionabili con le caratteristiche delle
immagini iperspettrali disponibili, acquisite dal sensore Hyperion. Da un lato, le immagini
multispettrali consentono di confrontare l’informazione ottenibile da sensori a larga banda
con quella veicolata dal dato iperspettrale a banda stretta, rendendo possibile la valutazione
dei vantaggi e degli svantaggi o la complementarietà di questi ultimi; dall’altro, lo studio e lo
sviluppo di metodi iperspettrali di stima dell’informazione potranno essere basati sul
confronto con i risultati ottenuti da analoghi criteri ed algoritmi conosciuti e sperimentati in
letteratura, basati su sensori a larga banda.
In conclusione, il risultato ottenuto dall’analisi e l’elaborazione delle immagini
multispettrali a banda larga unitamente alle informazioni ancillari disponibili intende
rappresentare il “dato di riferimento” di partenza, rispetto al quale viene valutata la validità e
l’innovatività dell’informazione iperspettrale a banda stretta relativamente alle tematiche
ambientali prescelte.
Di seguito, viene descritta l’area di studio selezionata per la sperimentazione e vengono
presentate le immagini multi-sensore acquisite unitamente ai relativi dati ancillari.
Successivamente, prima di affrontare separatamente le due tematiche di studio, viene
analizzata e verificata sia analiticamente che statisticamente la coerenza dell’informazione
iperspettrale a banda stretta con quella multispettrale a banda larga. Questa parte dell’attività
rappresenta una necessaria conseguenza dell’approccio multi-sensore che, utilizzando in
modo sinergico e confrontando l’informazione derivata da immagini acquisite da sensori
differenti, necessita indiscutibilmente, come presupposto di partenza, della intercalibrazione
dei dati, sia dal punto di vista spaziale che dal punto di vista radiometrico e spettrale. Tale
obiettivo è stato perseguito tramite la valutazione della coerenza statistica e spaziale di
immagini a banda larga simulate ottenute dall’insieme di immagini a banda stretta (Hyperion)
contenute nell’intervallo spettrale della banda larga originale (ALI).
6.8.3 Criteri di scelta dell’area test, acquisizione e
preelaborazione dei dati
Durante le fasi iniziali del progetto, sono state reperite immagini del sensore iperspettrale
Hyperion, scelto in conseguenza delle similarità con il sensore Prisma, ai fini dello studio, la
caratterizzazione e la generazione di immagini simulate del sensore relativo alla missione
OPTIMA. Le immagini acquisite coprono due zone: la prima comprende parte di Firenze e la
zona di Sesto Fiorentino e si estende fino ad una porzione del Mugello; la seconda area è
situata nella zona di San Rossore (Pisa). Pur essendo disponibili per ambedue le zone di
studio, sia immagini iperspettrali Hyperion e multispettrali ALI, che un insieme di dati
ausiliari fra cui un modello digitale del terreno a 10 m, la cartografia CTR a scala 1:10000, ed
infine una copertura ortofotografica Terraitaly 2007 con una risoluzione spaziale di 0,5 m al
suolo, tali dati non si sono rivelati utili per gli studi applicativi.
In particolare, le coperture ALI/Hyperiopn relative alla zona di Firenze/Mugello sono state
acquisite il 19 dicembre 2002 in pieno periodo invernale la prima, e nella stagione estiva del
2007 (30 luglio), la seconda. Analogamente, anche la copertura relativa alla zona di San
Rossore è stata acquisita, su richiesta, in pieno periodo estivo il 10 agosto dell’anno 2012.
Le acquisizioni invernali, quali l’immagine del 19 dicembre 2002 sono generalmente poco
adatte per studi sulle aree interessate da incendio, non solo per la particolare fase fenologica
della stagione, ma soprattutto in conseguenza della distanza temporale dalla stagione degli
incendi, notoriamente concentrati nella stagione estiva. Parimenti, le due immagini acquisite
durante la stagione estiva, non solo si riferiscono a due situazioni ambientali distanti nel
149
tempo circa dieci anni e quindi difficilmente confrontabili, ma inoltre l’acquisizione di una
singola immagine in pieno periodo estivo, quindi tendenzialmente siccitoso, non consente uno
studio sulla stima ed il monitoraggio dello stato di umidità superficiale, che richiede la
disponibilità di una sequenza multitemporale di acquisizioni ravvicinate nel tempo.
In effetti, una attenta analisi delle scene estive sia di Firenze/Mugello che di San Rossore,
ha permesso di accertare la mancanza totale di aree interessate da incendio nella stretta
strisca di circa 7 km acquisita dal sensore Hyperion, come ovviamente anche nella scena
acquisita nel periodo invernale. Analogamente, i periodi estivi 2010 e 2012 corrispondenti
all’acquisizione dei dati si sono rivelati essere caratterizzati da scarse precipitazioni, od
addirittura da siccità nel 2012. Di conseguenza, la scarsa o totale assenza di precipitazioni
durante il periodo, rende poco adatto il dato anche per lo studio sull’umidità del suolo, a meno
di potere disporre di una copertura multi-temporale della stessa zona.
In conseguenza di ciò, ai fini dello svolgimento dell’attività di studio sulle aree percorse da
incendio e la valutazione dello stato di umidità superficiale da immagini ottiche
iperspettrali/multispettrali, è stato necessario ricercare una copertura multi-temporale e multisensore (multispettrale ed iperspettrale), che presentasse caratteristiche di omogeneità
spaziale, spettrale e temporale (contemporaneità di acquisizione), in quanto la scelta del dato
da utilizzare e della zona da investigare rivestono un’importanza basilare in un contesto di
studio applicativo. Oltre alla attenzione per le caratteristiche spaziali e spettrali ed alla
effettiva disponibilità del dato, altro elemento critico considerato nella scelta è stato la
disponibilità di dati ancillari, relativi a informazioni e misure al suolo il più possibile accurate,
validate ed affidabili, da poter impiegare come riferimento e confronto per lo sviluppo e la
messa a punto di procedure operative di stima e monitoraggio.
Un apprccio multi-sensore, basato sulla scelta dei sensori Hyperion, ALI ed ETM+, ha
permesso di soddisfare le suddette esigenze di omogeneità di risoluzione spaziale (30 m) dei
dati, di contemporaneità delle acquisizioni in wusnto la piattaforma Landsat-7 con a bordo il
sensore ETM+ segue sulla stessa orbita a poche decine di secondi la piattaforma EO-1 con i
sensori Hyperion ed ALI, e di copertura spettrale corrispondente. Le immagini acquisite
risultano quindi influenzate dalla stessa geometria di acquisizione e dagli stessi effetti
atmosferici.
Data la limitata copertura di circa 7,5 per 100 km delle scene acquisite dal sensore
Hyperion rispetto a quelle di ALI (circa 35x86 km) e del sensore ETM+ (circa 185x185 km)
ed inoltre a causa della non completa inclusione della scena di Hyperion nel corrispondente
frame di ALI, l’intersezione effettiva tra le scene acquisite contemporaneamente dai tre
sensori risulta abbastanza limitata, come risulta dalla Fig. 6.64 che mostra la corrispondenza
di sovrapposizione spaziale dei tre sensori.
Fig. 6.64 Corrispondenza spaziale delle scene acquisite dai sensori Hyperion, ALI ed
ETM+
150
Per tale ragione, è stato necessario effettuare una ricerca approfondita su tutti i passaggi
disponibili in Internet sul sito USGS americano, relativamente ad una ampia casistica di
possibili aree di studio. In seguito ad una accurata analisi interpretativa volta a verificare sia la
qualità delle immagini sia la presenza dei fenomeni di interesse, le scene ALI/Hyperion più
adatte per la sperimentazione si sono rivelate essere quelle relative alla zona di Capalbio
(43°45’34’’N, 10°30’25’’E), acquisite rispettivamente il 12 luglio 2002 ed il 14 settembre
2002.
Per la stessa area e lo stesso periodo sono inoltre state acquisite anche le corrispondenti
immagini ETM+, in modo da potere disporre di un insieme di dati adatti alla sperimentazione
(Tab. 6-7), in funzione sia delle caratteristiche delle immagini, sia della presenza dei
fenomeni di interesse.
DATA
SENSORI
12 luglio 2002
HYPERION, ALI, ETM+
14 settembre 2002
HYPERION, ALI, ETM+
30 settembre 2002
ETM+
Tab. 6-7 immagini disponibili per l’area di studio di Capalbio
la scelta è caduta su questo insieme di dati in quanto l’analisi visiva ed interpretativa, oltre ad
verificare la qualità del dato, ha accertato la presenza di due aree estremamente interessanti.
La prima è un area classificata dalla mappa tematica dell’AIB, il servizio antincendi boschivo
regionale della Toscana, come affetta da un incendio avvenuto lo 08/07/2002. Nella figura
Fig.6.49 viene riportato il dettaglio di tale area estratto da due dati ETM+ acquisiti
rispettivamente il 12/07/2002 e il 14/09/2002
a)
12/07/2002
b) 14/09/2002
Fig. 6.65 Particolare della zona classificata come incendiata (immagini in falso colore
RGB=543). A) Dato ETM+ relativo al 12/07/2002; B) Dato ETM+ acquisito sulla
stessa area il 14/09/2002.
Purtroppo, a causa dello incompleta sovrapposizione fra le acquisizioni dei tre sensori
Hyperion, ALI ed ETM+, tale area non è presente nella immagine acquisita da ALI, ma in
compenso nelle stesse tre immagini è contemporaneamente presente una seconda area di
estremo interesse; tale area è una piccola area vegetata che pur non essendo riportata come
incendiata nella mappa AIB (che non è per sua natura esaustiva) lo è manifestamente dal
punto di vista dell’analisi visiva (Fig. 6.66).
151
Fig. 6.66 Particolare dell’area interessata da incendio estratta dalle scene ETM+, ALI ed
Hyperion acquisite il 12 luglio 2002. La combinazione spettrale è stata scelta per evidenziare
l’impatto del fenomeno sulla copertura vegetale.
Queste due aree rappresentano un caso di studio concreto relativamente all’impatto ed
all’evoluzione temporale che gli incendi hanno sulla copertura vegetale, e costituiscono di
conseguenza un dato basilare per lo svolgimento dell‘analisi sperimentale e la
caratterizzazione di tale fenomeno mediante immagini iperspettrali e multitemporali.
La Fig. 6.67 mostra invece (a scala differente) le scene acquisite il 12 luglio 2012 dai tre
sensori, mentre la Fig. 6.68 evidenzia la sovrapposizione spaziale delle immagini ETM+, ALI
ed Hyperion in seguito alla fase di correzione e geocodifica del dato. Il riquadro sovrapposto
sulll’immagine ETM+ indica l’area di studio scelta per la sperimentazione (zona di Capalbio),
che è comune alle acquisizioni dei tre sensori in tutte le date selezionate e comprende il
particolare dell’area incendiata di Fig. 6.66. , mentre l’area incendiata di fig. 6.49 si colloca
leggermente a ovest dell’altra zona.
La Fig. 6.69 mostra invece la non completa sovrapposizione delle due acquisizioni
effettuate da Hyperion il 12 luglio ed il 14 settembre 2002 durante due passaggi sulla stessa
orbita e come, di conseguenza, lo studio basato sull’impiego di immagini multitemporali sia
ulteriormente limitato spazialmente a circa la metà dell’ampiezza della strisciata Hyperion.
152
(a)
(b)
(c)
Fig. 6.67 Immagini acquisite il 12/07/2002 sulla zona di Capalbio. (a) ETM+
(RGB=3,2,1); (b) Hyperion (RGB=27,17,10); (c) ALI (RGB=4,3,2). (Scala spaziale
differente).
Fig. 6.68 Immagini ETM+, ALI e Hyperion acquisite il 12/07/2002, georiferite e
sovrapposte alla stessa scala. Il riquadro raffigura l’area di studio selezionata per la
sperimentazione, relativa alla zona di Capalbio.
153
14/09/2002
12/07/2002
Fig. 6.69 Parziale sovrapposizione delle strisciate acquisite da Hyperion rispettivamente il
12/07/2002ed il 14/09/2002 durante due passaggi sulla stessa orbita.
Se da un lato la disponibilità di una sequenza multitemporale di immagini di
telerilevamento acquisite durante e dopo la stagione estiva riveste una importanza basilare per
lo studio delle aree interessate da incendio, dall’altro consente di sviluppare e validare
possibili metodi per la stima dell’umidità superificiale, purché durante il periodo si siano
verificati eventi meteorologici di piovosità tali da determinare variazioni dello stato di umidità
del suolo durante il perido di tempo considerato.
La Fig. 6.70 mostra l’andamento delle precipitazioni medie giornaliere nella zona di Capalbio
misurato dalle stazioni meteorologiche di Scansano, Pomonte, Roccalbegna e Ponte Tura nel
periodo dal 1 luglio al 30 settembre 2002, comprendente quindi i passaggi satellitari avvenuti
i giorni 12/07/2002, 14/09/2002 e 30/092002, evidenziati in giallo. I giorni evidenziati in
verde si riferiscono al periodo di tempo antecedente ciascuna acquisizione, che si ritiene
significativo per la stima dell’umidità. Infine, la Fig. 6.71 mostra l’andamento della
precipitazione cumulata, e quindi la quantità media di acqua disponibile nel terreno nei giorni
precedenti ciascun passaggio. Dalle curve si evidenzia come l’evoluzione temporale della
quantità di acqua nel terreno sia differente per i tre periodi antecedenti i passaggi satellitari,
determinando quindi situazioni di umidità differente per le diverse acquisizioni.
L’andamento pluviometrico del periodo, conferma quindi la validità dell’insieme
multitemporale di dati anche per lo studio per la stima dell’umidità superficiale mediante
telerilevamento.
154
0
01‐lug
02‐lug
03‐lug
04‐lug
05‐lug
06‐lug
07‐lug
08‐lug
09‐lug
10‐lug
11‐lug
12‐lug
13‐lug
14‐lug
15‐lug
16‐lug
17‐lug
18‐lug
19‐lug
20‐lug
21‐lug
22‐lug
23‐lug
24‐lug
25‐lug
26‐lug
27‐lug
28‐lug
29‐lug
30‐lug
31‐lug
01‐ago
02‐ago
03‐ago
04‐ago
05‐ago
06‐ago
07‐ago
08‐ago
09‐ago
10‐ago
11‐ago
12‐ago
13‐ago
14‐ago
15‐ago
16‐ago
17‐ago
18‐ago
19‐ago
20‐ago
21‐ago
22‐ago
23‐ago
24‐ago
25‐ago
26‐ago
27‐ago
28‐ago
29‐ago
30‐ago
31‐ago
01‐set
02‐set
03‐set
04‐set
05‐set
06‐set
07‐set
08‐set
09‐set
10‐set
11‐set
12‐set
13‐set
14‐set
15‐set
16‐set
17‐set
18‐set
19‐set
20‐set
21‐set
22‐set
23‐set
24‐set
25‐set
26‐set
27‐set
28‐set
29‐set
30‐set
Precipitazione media giornaliera (mm)
80
70
60
50
40
30
20
10
scansano
pomonte
roccalbegna
ponte_tura
Fig. 6.70 Precipitazione media giornaliera nella zona dell’area di studio, misurata dalle stazione meteorologiche di Scansano, Pomonte,
Roccalbegna e Ponte Tura nel periodo dal 1 luglio al 30 settembre 2002, comprendentele acqisizioni satellitari (giallo.)
180
140
120
100
80
60
40
20
1
2
3
Precipitazione cumulata (mm)
160
12 lug
14‐set
30‐set
0
4
5
6
7
8
9 10
Giorni precedenti al passaggio del satellite
Fig. 6.71 Precipitazione cumulata relativa all’area di studio nei giorni precedenti le
acquisizioni satellitari del 12 luglio, 14 settembre e 30 settembre 2002.
Le immagini relative all’area di studio selezionata sono state successivamente sottoposte
ad un adeguata preelaborazione, comprendente le seguenti fasi:
Estrazione e riorganizzazione della sequenza spettrale di bande Hyperion utili, eliminando
le duplicazioni tra i due sensori VNIR e SWIR e alcune bande che sono in partenza
caratterizzate da dati non validi, passando quindi dalle 242 bande di acquisizione ad una
sequenza spettrale di 196 bande, della stessa larghezza e equidistanziate in frequenza
Correzione atmosferica
Georiferimento e proiezione in formato UTM WGS84.
Ortonormalizzaione delle immagini mediante DEM ; in assenza di dati ausiliari relativi
aideterminati parametri di acquisizione, è stato necessario ricavare gli RPC (Rational
Polinomial Coefficient) che definiscono il modello di correzione attraverso
l’individuazione di un adeguato numero di punti di controllo GCP (Ground Control
Point). I risultati hanno sempre evidenziato una accuratezza inferiore ad 1 pixel.
Geocodifica e coregistrazione tra le immagini acquisite da sensori differenti ed in date
differenti, in modo tale da ottenere una sovrapposizione con errore inferiore ad 1 pixel.
Calibrazione radiometrica (watt·m-2·sr –1·-1 ).
Selezione e ritaglio della finestra di studio relativamente ad una intersezione spaziale
comune ai tre sensori (Hyperion, ALI, ETM+). La finestra di studio selezionata copre una
esensione di circa 15,6 per 20,4 km (520680 pixels), comprendente una porzione utile di
strisciata Hyperion con una estensione trasversale all’orbita di circa 2,7 km.
6.8.4 COERENZA RADIOMETRICA TRA IL DATO
HYPERION ed ALI
L’analisi comparata delle potenzialità informative di un dato iperspettrale a banda stretta
rispetto a un dato multispettrale che acquisisce con bande più larghe nella stessa regione
spettralemediante un approccio multi-sensore, parte dal presupposto che i dati siano
intercalibrati, ovvero sia possibile ottenere la stessa informazione dai dati acquisiti da sensori
differenti nello stesso momento e nelle stesse condizioni di rilevamento. L’obiettivo della
prima fase della sperimentazione è stato quindi quello di validare tale presupposto, generando
a partire dalle immagini iperspettrali Hyperion a banda stretta delle immagini simulate a
banda larga, con caratteristiche spettrali corrispondenti alle immagini a banda larga del
sensore ALI, per poi confrontare il dato multi-spettrale originario con quello simulato a
partire dal dato iper-spettrale.
La sperimentazione è stata effettuata utilizzando le immagini acquisite dai sensori
Hyperion ed ALI, escludendo per il momento il dato ETM+. Si è preferito inizialmente
impiegare il dato ALI invece del dato ETM+ in quanto, a differenza di quest’ ultimo, ALI
acquisisce in contemporanea dalla stessa piattaforma satellitare di Hyperion. Questo permette
di eliminare alcune variabili, quali la precisione di georeferenziazione e le condizioni
atmosferiche, che potrebbero introdurre discrepanze fra dato simulato e dato originario non
ascrivibili alla diversa origine spettrale del dato.
6.8.4.1Generazione di immagini ALI simulate a banda larga da
immagini Hyperion a banda stretta
La simulazione di un dato acquisito da un sensore multispettrale a partire dal dato acquisito
da un sensore iperspettrale può essere fatta a più livelli di precisione. Se trascuriamo gli errori
ed il rumore introdotto dai sensori, che saranno ovviamente diversi, possiamo seguire le
seguenti considerazioni: detta R la radianza al generico sensore multi- o iper-spettrale, la
densità spettrale di radianza RiM misurata (in W·m-2·sr–1·-1) nella banda i dal sensore
multispettrale sarà pari a:
1
R M M
i i
M
i
iM
MTF R d
M
i = 1 ; NM
Eq. 6-41
iM
dove iM e iM sono gli estremi inferiore e superiore della banda i , N M il numero delle
bande multispettrali ed MTF M l’MTF del sensore multispettrale.
Analogamente, con notazione simile, per le N iH bande iperspettrali che cadono all’interno
della i-esima banda multispettrale si potrà scrivere:
1
RiH, j H H
i , j i , j
iH, j
MTF
H
H
R d
i = 1 ; NM
j= 1; N iH
Eq. 6-42
i , j
dove la coppia i,j indica la generica j-esima banda iper-spettrale compresa nella generica
banda multi-spettrale i-esima.
Volendo sintetizzare la i-esima banda multispettrale, sarebbe necessario ricostruire il
segnale R nell’intervallo [ iM ; iM ] a partire dai valori RiH, j delle bande iperspettrali ivi
comprese ( j= 1; N iH ).
Una approssimazione potrebbe essere fatta assumendo, per ipotesi, il valore dell’MTF iperspettrale costante all’interno delle singole bande iperspettrali
HP1)
MTF H MTFi ,Hj
iH, j ; iH, j
Quiesta ipotesi è ragionevole in quanto configura la situazione ottimale a cui si mira in fase
del progetto dei sensori:
157
in questo caso l’eq 2.2 diventa:
iH, j
1
RiH, j H H MTFi H, jH R d
i , j i , j
H
i = 1 ; NM
j= 1; N iH
Eq. 6-43
i, j
da cui:
RiH, j iH, j iH, j
H
MTF i , jH
iH, j
R d
i = 1 ; NM
j= 1; N iH
Eq. 6-44
iH, j
Introducendo come seconda ipotesi semplificativa il valore dell’MTF multi-spettrale
costante all’interno delle singole bande multispettrali (Hp. ragionevole per le stesse
motivazioni addotte per l’HP1):
iM ; iM
MTF M MTFi M
HP2)
la eq 2.3 diventa
MTF M
RiM M iM
i i
iM
R d
i = 1 ; NM
Eq. 6-45
M
i
Se le N iH bande iper-spettrali sono contigue e coprono tutta la i-esima banda multispettrale possiamo scrivere:
iM
H
N iH i , j
j 1 H
i, j
R d R d
HP3)
iM
i = 1 ; NM
Eq. 6-46
Sostituendo la 2-6 nella 2-5 avremo:
RiM
MTF M
M iM
i i
H
N iH i , j
R d
i = 1 ; NM
H
j= 1; N iH
Eq. 6-47
j 1
i, j
Sostituendo ora la 2-4 nella 2-7 si otterrà:
M
i
R
MTFi M
M M
i i
N iH
RiH, j iH, j iH, j
j 1
H
MTFi , jH
i = 1 ; NM
j= 1; N iH
Eq. 6-48
Se inoltre assumiamo come quarta ipotesi la costanza dell’ MTF H di tutte le bande
iperspettrali conenute nella stessa banda multispettrale:
HP4)
MTFi ,Hj MTFi H
iH, j ; iH, j
avremo:
158
i = 1 ; NM
j= 1; N iH Eq. 6-49
M
i
R
N iH
R
MTFi M
1
M M
H
MTFi i i
j 1
H
H
i, j
i, j
iH, j
i = 1 ; NM
Eq. 6-50
La 2-10, sotto le opportune ipotesi HP1, HP2, HP3 e HP4 ci permette di ricavare il valore
del dato multispettrale a partire dal dato iper-spettrale.
Nel nostro caso, essendo costanti le larghezze delle bande iperspettrali, si potrà scrivere:
j 1; N iH
H
i, j
iH, j Hi
i = 1 ; NM
Eq. 6-51
e in forza della HP3:
iM
N Hj
M
i
M
i
i = 1 ; NM
Eq. 6-52
Sostituendo dunque nella 2-12, si otterrà:
M
i
R
MTFi M
Hi
MTFi H iM iM
N iH
R
j 1
H
i, j
MTFi M 1
MTFi H N Hj
N iH
R
j 1
H
i, j
i = 1 ; NM
Eq. 6-53
Dunque il valore di densità di radianza della generica banda multi-spettrale i è
proporzionale alla media dei valori delle densità di radianza delle N iH bande iper-spettrali
contenute nel suo intervallo spettrale.
E’ possibile osservare come le Hp. precedentemente fatte siano ragionevoli e valgano
sicuramente in prima approssimazione; purtroppo un discostamento dal caso ideale
prospettato è in pratica sempre presente, e risulta molto difficile valutare quanto un pur
piccolo scostamento possa influire sulla qualità del dato simulato. Anche per questo è
possibile osservare come in letteratura il tema della simulazione di un dato multispettrale a
partire da un dato iperspettrale sia stato molto trattato e come siano state proposte varie
soluzioni, tra loro più o meno complesse e basate su conoscenze più o meno approfondite dei
sensori in questione. Visto il carattere prettamente applicativo di questo contesto e la presenza
nel database di dati multispettrali da poter usare come riferimento, sono state analizzate e
comparate fra loro tre tecniche di simulazione caratterizzate da differenti livelli di
complessità, in modo da analizzare la qualità del dato simulato prodotto. In particolare per la
simulazione di una banda multispettrale sono state confrontate le seguenti procedure (livello
di complessità crescente):
a)
Semplice media delle bande iperspettrali che cadono (tutte o in percentuale
maggiore del 50%) all’interno della banda multispettrale da simulare. In particolare
questa procedura è affine a quella descritta in Eq. 6-49, con la sola differenza di un
fattore proporzionale; tale costante però è costante nel tempo e nello spazio, per cui
può essere ricavata una volta per tutte attraverso una intercalibrazione di un dato
multispettrale simulato con un dato multispettrale originale relativo.
b)
Media pesata delle bande iperspettrali che cadono (tutte o anche solo in parte)
all’interno della banda multispettrale da simulare, dove il peso tiene conto della
percentuale di banda iperspettrale che cade nella banda multispettrale). Anche in questo
caso una successiva intercalibrazione potrebbe migliorare la qualità del dato simulato.
159
c) Simulazione con utilizzo dell’MTF
Il confronto fra i dati simulati con le tre diverse tecniche ha permesso di evidenziare come
le discrepanze esistenti fra i dati prodotti siano molto basse e comparabili con quelle esistenti
fra il dato iperspettrale e quello multispettrale originale (ove esistente); da ciò ne consegue
che, da un punto di vista applicativo, l’adozione di un metodo piuttosto che di un altro non
influisce significativamente sui risultati applicativi. Nel nostro particolare caso, per le
immagini è stata adottata la strategia c) mentre per gli spettri di riferimento si è adottata la
strategia b) in quanto in quest’ultimo caso l’MTF non era disponibile.
6.8.4.2Valutazione statistica delle bande ALI simulate
Il confronto tra immagini ALI simulate ottenute dal dato Hyperion mediante l’eq. 2.13 e le
immagini ALI originali ha permesso di verificare la validità delle ipotesi HP1, HP2 ed HP4
ed inoltre di ricavare una stima del valore del fattore di bias .
Le bande ALI simulate sono state generate sulla base dello schema di Tab. 6-8 che mostra
la corrispondenza spettrale tra bande originali ALI e quelle iperspettrali Hyperion.
160
196 bands
426.8
1
437.0
2
447.2
3
457.3
4
467.5
5
477.7
6
487.9
7
498.0
8
508.2
9
518.4
10
528.6
11
538.7
12
548.9
13
559.1
14
569.3
15
579.4
16
589.6
17
599.8
18
…
…
630.3
21
640.5
22
650.7
23
660.8
24
671.0
25
681.2
26
691.4
27
…
…
772.8
35
783.0
36
793.1
37
803.3
38
…
…
844.0
42
854.2
43
864.4
44
874.5
45
884.7
46
894.9
47
…
…
1,205.1
78
1,215.2
79
1,225.2
80
1,235.3
81
1,245.4
82
1,255.5
83
1,265.6
84
1,275.7
85
1,285.8
86
1,295.9
87
…
…
1
433
453
450
…
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
…
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
2
515
522
3
…
605
…
630
4
…
690
…
775
5
…
805
…
845
6
…
895
…
1200
7
…
1300
…
…
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
…
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
λ
…
1,548.0
1,558.1
1,568.2
1,578.3
1,588.4
1,598.5
1,608.6
1,618.7
1,628.8
1,638.8
1,648.9
1,659.0
1,669.1
1,679.2
1,689.3
1,699.4
1,709.5
1,719.6
1,729.7
1,739.7
1,749.8
…
2,082.8
2,092.8
2,102.9
2,113.0
2,123.1
2,133.2
2,143.3
2,153.3
2,163.4
2,173.5
2,183.6
2,193.7
2,203.8
2,213.9
2,224.0
2,234.1
2,244.2
2,254.2
2,264.3
2,274.4
2,284.5
2,294.6
2,304.7
2,314.8
2,324.9
2,335.0
2,345.1
ALI band#
Layer
λ
band#
Hyperion
ALI band#
Layer
band#
Hyperion
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
…
28
29
30
31
32
33
34
…
42
43
44
45
…
49
50
51
52
53
54
…
106
107
108
109
110
111
112
113
114
115
…
λ
…
λ
…
1550
8
…
1750
…
2080
9
2350
Tab. 6-8 Corrispondenza tra le bande multispettrali del sensore ALI e quelle iperspettrali di Hyperion
La congruenza delle bande ALI simulate con quelle originali è stata valutata sulla base
della similarità dei parametri statistici, della correlazione, del valore di RMSE ed infine della
distribuzione delle radianze.
161
ALI 1/07/2012
BANDA
1
2
3
4
5
6
7
8
9
MEDIA
64.006
58.760
51.877
44.486
87.618
79.519
37.610
14.031
2.698
MIN
55.28
45.351
30.384
-1.3
25.847
-0.65
-1.3
-0.6
-0.21
MAX
111.62
123.31
118.02
120.31
153.13
131.38
61.141
29.559
7.984
MEDIANA
63.222
57.32
49.791
41.928
86.135
78.26
37.238
13.537
2.607
MODA
STD
58.426
47.686
36.421
20.076
81.349
74.649
37.726
10.121
1.358
5.312
9.179
13.509
20.346
11.694
10.628
5.119
4.118
1.159
Tab. 6-9 Parametri statistici bande dato Ali 12/07/2002
La Tab. 6-9mostra i valori dei parametri statistici di Media, Minimo, Massimo, Mediana e
Deviazione Standard relativi all’immagine ALI originale del 12/07/2013, mentre
corrispondenti valori dell’immagine simulata sono riportati nella Tabella 2.4.
ALI simulato da Hyperion 1/07/2012
BANDA
1
2
3
4
5
6
7
8
9
MEDIA
58.245
55.584
52.978
46.275
86.742
78.824
36.777
13.932
2.756
MIN
43.95
40.397
30.806
17.096
30.65
22.158
10.175
4.762
0.6287
MAX
102.34
115.34
119.05
123.63
153.52
131.79
60.751
28.73
7.782
MEDIANA
57.565
54.516
50.688
43.947
85.755
77.734
36.546
13.467
2.645
MODA
51.968
45.055
37.202
20.766
83.356
75.675
37.02
9.988
1.307
STD
5.820
9.165
14.141
20.988
11.686
10.579
5.194
4.166
1.216
Tab. 6-10 Parametri statistici bande dato Ali 12/07/2002
Confrontando Tab. 6-9 e Tab. 6-10 si può notare come i valori dei parametri spaziaòi
dell’immagine ALI simulata siano molto simili a quelli dell’immagine originale di
riferimento. Per facilitare il confronto, in Tab. 6-11 è riportato il valore dell’errore relativo.
per tutti i parametri di ciascuna banda spettrale.
162
Errore relativo percentuale fra i parametri statistici dei dati Ali e ALI
simulato
Banda
1
2
3
4
5
6
7
8
9
MEDIA
-1.619
-0.974
0.381
0.788
-0.169
-0.496
-0.450
-0.538
-0.020
MIN
-23.943
-25.88
-31.591
-6677.5
-36.178
-17190
-3554.7
-4002
-2898.1
MAX
MEDIANA
9.244
21.455
49.142
97.156
53.04
70.923
184.25
64.097
222.09
-0.090
-0.015
-0.054
-8.698
-0.282
-63.931
-5.617
-15.318
-9.486
MODA
STD
-0.090
-0.015
-0.054
-8.698
-0.282
-63.931
-5.617
-15.318
-9.486
3.731
2.588
2.725
15.096
1.621
65.947
12.792
32.970
24.430
Tab. 6-11 Parametri statistici bande dato Ali 12/07/2002
Anche la misura della correlazione e dell’RMSE riportati in Tab. 6-12evidenziano l’elevata
congruenza o similarità delle bande simulate con quelle originali.
Banda
R2
RMSE
0,940
6,094
1
0,970
3,880
2
0,971
3,559
3
0,975
4,986
4
0,961
3,388
5
0,957
3,195
6
0,964
1,620
7
0,967
1,066
8
0,971
0,298
9
Tab. 6-12 Confronto bande dei dati Ali e ALI simulato con Hyperion (12/07/2002)
Sono stati calcolati sia il valore di correlazione che lo scarto quadratico medio RMSE, in
quanto quest’ultimo considera la differenza esistente fra i valori dei pixel, mentre la misura di
correlazione non è sensibile ad un eventuale fattore di guadagno esistente fra i due dati.
Gli istogrammi relativi alle bande simulate sono messi a confronto con le corrispondenti
bande originali in Fig. 6.72.
163
ALI vs. ALI simuated
Band 1 simulated
ALI vs. ALI simuated
Band 2 simulated
Band 1
3000
Number of pixels
Number of pixels
3000
2500
2000
1500
1000
500
0
2500
2000
1500
1000
500
0
0
25
50
75
100
125 150
175
0
radiance [ W / m2 sr micron ]
Band 3 simulated
Band 3
Number of pixels
Number of pixels
2000
1500
1000
500
0
50
75
100
125
125
150
175
150
Band 4
2000
1500
1000
500
0
0
175
25
50
75
100
125
150
175
2
radiance [ W / m sr micron ]
ALI vs. ALI simuated
ALI vs. ALI simuated
Band 6 simulated
Band 5
Band 6
3000
Number of pixels
3000
Number of pixels
100
3000
2500
radiance [ W / m2 sr micron ]
Band 5 simulated
75
Band 4 simulated
2500
25
50
ALI vs. ALI simuated
3000
0
25
radiance [ W / m2 sr micron ]
ALI vs. ALI simuated
2500
2000
1500
1000
500
0
0
25
50
75
100
125
150
2500
2000
1500
1000
500
0
175
0
2
2500
Number of pixels
3000
2000
1500
1000
500
0
50
75
100
125
100
125
Band 8 simulated
2500
25
75
150
175
ALI vs. ALI simuated
Band 7
3000
0
50
radiance [ W / m sr micron ]
ALI vs. ALI simuated
Band 7 simulated
25
2
radiance [ W / m sr micron ]
Number of pixels
Band 2
150
Band 8
2000
1500
1000
500
0
175
0
2
radiance [ W / m sr micron ]
25
50
75
100
125
150
175
radiance [ W / m2 sr micron ]
ALI vs. ALI simuated
Band 9 simulated
Band 9
Number of pixels
3000
2500
2000
1500
1000
500
0
0
5
10
15
20
25
2
radiance [ W / m sr micron ]
Fig. 6.72 Istogrammi delle 9 bande ALI originali (blue) messe a confronto con gli istogrammi
delle corrispondenti bande simulate (rosso).
Dall’analisi dei dati elaborati si può concludere che la differenza fra le bande ALI originali
e quelle simulate è molto piccola. Da notare la differente forma degli istogrammi delle prime
due bande, con la presenza di un picco verso i valori bassi. Vista la somiglianza fra dato
164
originale e dato simulato, per eliminare un possibile influsso residuo dovuto a differenti
geometrie e tempi di acquisizione, il confronto iper- multi-spettrale è stato effettuato in prima
istanza utilizzando come dato multispettrale il dato ALI simulato.
6.8.5 CARATTERIZZAZIONE STATISTICA DELLE IMMAGINI
HYPERION
Layer
Il dato iperspettrale Hyperion è stato inizialmente caratterizzato da un punto di vista
generico considerando la scena acquisita il 12/07/2010 sulla zona di Capalbio. I valori di
media, mediana, moda e standard deviation sono stati calcolati per ogni banda e sono riportati
in Tab. 6-13. Nella tabella sono stati anche riportati i valori medi ottenuti facendo la media
dei suddetti parametri relativi alle bande iperspettrali contenute nelle singole bande
multispettrali di ALI. Per completezza, le prime colonne contengono i valori degli estremi
intervalli spettrali sia delle bande iperspettrali che nultispettrali.
λ
ALI
λ
196 bands
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
21
22
23
24
25
26
27
35
36
37
38
42
43
44
45
46
426.8
437.0
447.2
457.3
467.5
477.7
487.9
498.0
508.2
518.4
528.6
538.7
548.9
559.1
569.3
579.4
589.6
599.8
630.3
640.5
650.7
660.8
671.0
681.2
691.4
772.8
783.0
793.1
803.3
844.0
854.2
864.4
874.5
884.7
MEAN
HYP
1
433
453
450
2
515
522
3
605
630
4
690
775
5
805
845
6
59.047
57.443
56.375
57.096
57.440
59.577
54.495
53.993
54.176
51.580
54.294
54.663
55.167
55.254
52.905
51.173
50.842
49.560
50.897
48.945
47.224
44.937
46.835
46.462
43.382
89.054
89.831
85.091
82.992
82.483
83.158
82.783
81.380
78.272
MS
58.245
55.592
52.982
46.955
86.742
78.824
MEDIAN
HYP
58.211
56.492
55.303
55.994
56.067
58.078
53.278
52.417
52.566
49.897
52.421
52.741
52.992
53.244
50.843
48.819
48.614
47.235
45.052
45.301
44.661
42.513
44.438
43.663
40.781
87.514
88.556
83.967
81.633
81.357
82.266
81.870
80.616
77.226
MS
57.352
54.200
50.864
43.773
85.418
77.891
MODE
HYP
53.063
51.246
49.610
49.111
47.993
48.478
43.260
41.748
40.832
38.557
40.615
41.439
52.992
40.408
37.439
33.306
31.946
28.891
28.618
26.567
21.845
19.839
19.694
18.785
17.813
83.138
85.438
81.635
78.798
78.058
79.523
79.687
76.373
76.724
MS
52.155
44.949
38.380
21.880
82.252
75.523
STD
HYP
5.884
5.993
6.220
7.165
8.048
9.301
9.576
10.506
11.394
11.334
11.879
12.061
12.651
13.485
14.213
15.357
16.554
17.069
18.633
18.898
20.756
20.628
22.530
22.963
21.011
12.034
12.121
11.458
11.167
11.090
11.181
11.153
10.947
10.519
47
894.9
895
64.868
64.013
62.774
8.692
78
1,205.1
1200
33.340
33.005
33.222
4.962
79
1,215.2
36.615
36.330
36.330
5.214
80
1,225.2
39.431
38.995
39.508
5.534
81
1,235.3
40.959
40.738
40.471
82
1,245.4
83
1,255.5
84
85
40.499
7
36.777
40.305
36.493
40.566
5.708
37.108
37.347
5.172
1,265.6
32.746
32.571
32.571
4.504
1,275.7
36.345
36.037
36.499
5.069
86
1,285.8
37.106
36.835
37.310
5.281
87
1,295.9
33.405
33.005
32.571
4.884
165
9.193
14.159
20.774
11.695
10.597
5.785
36.640
37.327
1300
MS
5.939
5.211
Layer
λ
ALI
λ
196 bands
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
1,548.0
1,558.1
1,568.2
1,578.3
1,588.4
1,598.5
1,608.6
1,618.7
1,628.8
1,638.8
1,648.9
1,659.0
1,669.1
1,679.2
1,689.3
1,699.4
1,709.5
1,719.6
1,729.7
1,739.7
1,749.8
2,082.8
2,092.8
2,102.9
2,113.0
2,123.1
2,133.2
2,143.3
2,153.3
2,163.4
2,173.5
2,183.6
2,193.7
2,203.8
2,213.9
2,224.0
2,234.1
2,244.2
2,254.2
2,264.3
2,274.4
2,284.5
2,294.6
2,304.7
2,314.8
2,324.9
2,335.0
2,345.1
MEAN
HYP
1550
8
1750
2080
9
2350
15.996
16.024
14.908
14.736
15.439
15.012
15.108
16.083
16.223
15.418
15.528
15.106
14.649
14.264
13.636
12.925
12.072
11.138
10.194
9.423
8.997
3.314
3.449
3.486
3.481
3.545
3.706
3.646
3.405
3.244
3.271
3.061
2.991
3.008
3.189
3.085
2.926
2.722
2.498
2.284
2.211
2.086
1.861
1.927
1.685
1.640
1.475
1.218
MS
13.947
2.756
MEDIAN
HYP
15.447
15.562
14.442
14.231
14.934
14.572
14.654
15.504
15.645
14.865
14.708
14.443
14.063
13.783
13.279
12.462
11.663
10.787
9.870
9.106
8.660
3.183
3.276
3.335
3.331
3.392
3.540
3.510
3.278
3.173
3.208
2.979
2.933
2.944
3.101
2.978
2.821
2.604
2.385
2.174
2.104
1.998
1.787
1.858
1.611
1.558
1.399
1.169
MS
13.461
2.653
MODE
HYP
10.704
10.774
10.675
10.460
11.011
10.929
10.869
11.499
11.637
11.397
11.360
11.194
10.898
10.422
9.824
9.524
8.771
7.911
7.193
6.460
5.972
1.440
1.398
1.487
1.625
1.736
1.812
1.636
1.603
1.569
1.604
1.473
1.498
1.574
1.645
1.536
1.533
1.361
1.248
1.087
0.987
0.975
0.861
0.860
0.806
0.759
0.709
0.600
MS
9.975
1.312
STD
HYP
5.363
5.189
4.671
4.549
4.662
4.481
4.439
4.670
4.667
4.403
4.350
4.298
4.164
4.077
3.949
3.757
3.585
3.401
3.154
2.949
2.876
1.580
1.623
1.630
1.610
1.612
1.678
1.629
1.502
1.410
1.404
1.297
1.251
1.233
1.307
1.300
1.243
1.156
1.073
0.978
0.965
0.949
0.863
0.897
0.788
0.771
0.707
0.591
MS
4.174
1.224
Tab. 6-13 Parametri statistici del dato Hyperion (Capalbio, 12/07/2010).
Da un confronto fra i valori della Tab. 6-13 e i valori della Tab. 6-9, in cui sono riportati
gli stessi parametri statistici relativi però al dato ALI, si può osservare che i valori di radianza
sono congruenti, per cui le considerazioni fatte per i metodi multispettrali potranno essere
ragionevolmente considerate anche per una loro applicazione al dato iperspettrale, con
particolare riferimento ai metodi a soglia che potranno essere utilizzati senza introdurre bias o
gain di intercalibrazione.
166
6.8.6 POTENZIALITA’ AGGIUNTIVE DEL DATO
IPERSPETTRALE
Il dato iperspettrale è caratterizzato da un numero di bande significativamente maggiore del
dato multispettrale. Parte di esse si colloca esternamente agli intervalli spettrali delle bande
multispettrali, mentre altre si trovano posizionate all’interno delle bande multispettrali stesse,
fornendo quindi una informazione con risoluzione spettrale superiore. Anche se in fase di
progettazione il posizionamento delle bande del sensore ALI, è stato stabilito in modo tale da
comprendere gli intervalli spettrali più significativi ai fini dello studio dei fenomeni
ambientali in generale, ciò nonostante, le bande iperspettrali esterne agli intervalli
corrispondenti alle bande multispettrali forniscono indubbiamente una informazione ulteriore,
rispetto al multispettrale.
Per quanto riguarda le bande iperspettrali che cadono all’interno delle bande multi-spettrali,
la situazione è più complessa. La disponibilità di più misure fornite dalle bande iperspettrali
collocate all’interno dell’intervallo relativo ad una singola misura multispettrale fornisce in
generale un maggior contenuto di informazione, ma l’apporto aggiuntivo dei campioni
iperspettrali può variare significativamente in funzione delle caratteristiche del fenomeno.
L’elevato numero di bande acquisite per ogni pixel dai sensori iperspettrali, può
portare a considerare l’operazione di acquisizione come un campionamento dello spettro del
singolo pixel, per la quale può essere considerata la teoria del campionamento di Shannon.
Dal punto di vista teorico, all’aumentare del numero di bande ne deriva una diminuzione dell’
”aliasing spettrale” [a] che affligge il segnale acquisito; la qualità del segnale acquisito non
dipende però solo dalla quantità di aliasing introdotto, ma anche dal precedente prefiltraggio
sia spettrale che spaziale. Un filtraggio passa-basso preliminare riduce infatti la quantità di
aliasing introdotto, ma il segnale acquisito perde comunque di qualità a causa dell’effeto di
“sfocamento” introdotto dal filtro.
Se Trascuriamo l’aspetto spaziale e consideriamo quello spettrale, la larghezza
spettrale nominale delle bande è, come avviene usualmente per questo tipo di sensori, pari alla
distanza fra i centri banda, e questo configura un’operazione di pre-filtraggio spettrale che
viene spesso considerata come un compromesso ottimale.
Dunque la qualità del campionamento, secondo Shannon dipenderà dal segnale
campionato, e cioè dalla trasformata di Fourier dello spettro, che chiameremo metaspettro. Se
il massimo valore del metaspettro è superiore a metà della frequenza di campionamento in
frequenza, il metaspettro sarà filtrato durante l’integrazione sulla finestra iper-spettrale. Se è
inferiore, allora avremo una situazione di sovracampionamento, e l’informazione aggiuntiva
veicolata dall’iper-spettrale tenderà a diminuire al diminuire del massimo valore del
metaspettro, per arrivare a zero nel caso che tale massimo sia inferiore a metà del passo di
campionamento della banda multispettrale, cioè a metà della larghezza della banda larga.
Da un punto di teorico si può quindi affermare che il valore di informazione
aggiuntivo fornito dal dato iper-spettrale diminuisce al crescere della correlazione fra le
bande iperspettrali comprese nella singola banda multi-spettrale. Dunque più le singole bande
iperspettrali sono scorrelate , maggiore è l’informazione contenuta in esse.
Una prima caratterizzazione delle potenzialità aggiuntive del dato iperspettrale rispetto a
quella del dato multispettrale può quindi essere fatta considerando la varianza del dato
iperspettrale all’interno delle singole bande multispettrali. Le Tab. 6-14 e Tab. 6-22 mostrano
la correlazione esistente fra le singole bande iperspettrali di Hyperion contenute in ciascuna
banda multispettrale ALI. Minore è la correlazione, maggiore sarà la quantità di informazione
aggiuntiva veicolata dal dato iperspettrale rispetto al dato multispettrale.
167
Banda ALI 1
Bande
8
hyperion
8
9
1.000
0.940
9
0.940
1.000
Tab. 6-14 Correlazione bande Hyperion contenute nella banda 1 di ALI
Banda ALI 2
Bande
hyperion
10
11
12
13
14
15
16
17
10
1.000
0.986
0.986
0.984
0.982
0.981
0.980
0.980
11
0.986
1.000
0.993
0.992
0.991
0.990
0.989
0.989
12
13
0.986
0.993
1.000
0.995
0.995
0.995
0.994
0.994
14
0.984
0.992
0.995
1.000
0.997
0.997
0.996
0.996
0.982
0.991
0.995
0.997
1.000
0.998
0.998
0.997
15
0.981
0.990
0.995
0.997
0.998
1.000
0.998
0.998
16
0.980
0.989
0.994
0.996
0.998
0.998
1.000
0.999
17
0.980
0.989
0.994
0.996
0.997
0.998
0.999
1.000
Tab. 6-15 Correlazione bande Hyperion contenute nella banda 2 di ALI
Banda ALI 3
Bande
hyperion
18
19
20
21
22
23
24
25
18
1.000
0.999
0.998
0.997
0.997
0.996
0.995
0.994
19
0.999
1.000
0.999
0.999
0.998
0.997
0.995
0.994
20
0.998
0.999
1.000
0.999
0.999
0.997
0.995
0.994
21
0.997
0.999
0.999
1.000
0.999
0.998
0.997
0.995
22
0.997
0.998
0.999
0.999
1.000
0.999
0.998
0.997
23
0.996
0.997
0.997
0.998
0.999
1.000
0.999
0.999
24
0.995
0.995
0.995
0.997
0.998
0.999
1.000
0.999
25
0.994
0.994
0.994
0.995
0.997
0.999
0.999
1.000
Tab. 6-16 Correlazione bande Hyperion contenute nella banda 3 di ALI
Banda ALI 4
Band
e
hyperion
28
29
30
31
32
33
34
28
29
30
31
32
33
34
1.000
1.000
0.999
0.999
0.998
0.998
0.997
1.000
1.000
1.000
0.999
0.999
0.998
0.998
0.999
1.000
1.000
1.000
0.999
0.999
0.999
0.999
0.999
1.000
1.000
1.000
1.000
0.999
0.998
0.999
0.999
1.000
1.000
1.000
1.000
0.998
0.998
0.999
1.000
1.000
1.000
1.000
0.997
0.998
0.999
0.999
1.000
1.000
1.000
Tab. 6-17 Correlazione bande Hyperion contenute nella banda 4 di ALI
168
Banda ALI 5
Band
e
hyperion
36
37
38
39
35
36
37
38
1.000
0.999
0.998
0.997
0.999
1.000
0.999
0.998
0.998
0.999
1.000
0.999
0.997
0.998
0.999
1.000
Tab. 6-18 Correlazione bande Hyperion contenute nella banda 5 di ALI
Banda ALI 6
Band
e
hyperion
49
50
51
52
53
54
49
50
51
52
53
54
1.000
0.998
0.998
0.997
0.995
0.991
0.998
1.000
0.998
0.997
0.996
0.992
0.998
0.998
1.000
0.998
0.997
0.993
0.997
0.997
0.998
1.000
0.997
0.994
0.995
0.996
0.997
0.997
1.000
0.995
0.991
0.992
0.993
0.994
0.995
1.000
Tab. 6-19 Correlazione bande Hyperion contenute nella banda 6 di ALI
Banda ALI 7
Band
e
hyperion
106
107
108
109
110
111
112
113
114
115
106
107
108
109
110
111
112
113
114
115
1.000
0.993
0.992
0.992
0.991
0.991
0.991
0.990
0.990
0.988
0.993
1.000
0.996
0.991
0.991
0.992
0.992
0.990
0.990
0.987
0.992
0.996
1.000
0.994
0.994
0.994
0.993
0.993
0.992
0.989
0.992
0.991
0.994
1.000
0.997
0.995
0.994
0.994
0.993
0.990
0.991
0.991
0.994
0.997
1.000
0.996
0.994
0.995
0.994
0.989
0.991
0.992
0.994
0.995
0.996
1.000
0.997
0.995
0.994
0.990
0.991
0.992
0.993
0.994
0.994
0.997
1.000
0.995
0.994
0.991
0.990
0.990
0.993
0.994
0.995
0.995
0.995
1.000
0.997
0.991
0.990
0.990
0.992
0.993
0.994
0.994
0.994
0.997
1.000
0.993
0.988
0.987
0.989
0.990
0.989
0.990
0.991
0.991
0.993
1.000
Tab. 6-20 Correlazione bande Hyperion contenute nella banda 7 di ALI
169
Banda ALI 8
Bande hyperion
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
140
1.000
0.997
0.997
0.997
0.996
0.996
0.995
0.994
0.993
0.992
0.992
0.992
0.992
0.993
0.994
0.995
0.995
0.995
0.995
0.996
0.995
141
0.997
1.000
0.999
0.997
0.997
0.997
0.996
0.995
0.994
0.993
0.993
0.993
0.993
0.995
0.995
0.995
0.996
0.996
0.996
0.996
0.995
142
0.997
0.999
1.000
0.997
0.997
0.997
0.996
0.995
0.994
0.994
0.994
0.993
0.993
0.995
0.996
0.996
0.996
0.996
0.996
0.996
0.996
143
0.997
0.997
0.997
1.000
0.999
0.997
0.996
0.996
0.995
0.995
0.995
0.994
0.995
0.996
0.996
0.997
0.996
0.996
0.996
0.997
0.996
144
0.996
0.997
0.997
0.999
1.000
0.997
0.997
0.996
0.996
0.995
0.995
0.995
0.995
0.996
0.996
0.997
0.997
0.997
0.996
0.997
0.996
145
0.996
0.997
0.997
0.997
0.997
1.000
0.999
0.997
0.996
0.996
0.996
0.996
0.996
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.996
146
0.995
0.996
0.996
0.996
0.997
0.999
1.000
0.997
0.996
0.996
0.996
0.997
0.997
0.997
0.997
0.997
0.997
0.996
0.996
0.996
0.996
147
0.994
0.995
0.995
0.996
0.996
0.997
0.997
1.000
0.999
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.996
0.996
0.996
0.995
148
0.993
0.994
0.994
0.995
0.996
0.996
0.996
0.999
1.000
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.996
0.996
0.995
0.996
0.995
149
0.992
0.993
0.994
0.995
0.995
0.996
0.996
0.997
0.997
1.000
0.999
0.997
0.997
0.997
0.997
0.997
0.996
0.995
0.995
0.995
0.994
150
0.992
0.993
0.994
0.995
0.995
0.996
0.996
0.997
0.997
0.999
1.000
0.997
0.997
0.997
0.997
0.997
0.996
0.995
0.995
0.995
0.994
151
0.992
0.993
0.993
0.994
0.995
0.996
0.997
0.997
0.997
0.997
0.997
1.000
0.999
0.997
0.996
0.997
0.996
0.995
0.995
0.995
0.994
152
0.992
0.993
0.993
0.995
0.995
0.996
0.997
0.997
0.997
0.997
0.997
0.999
1.000
0.997
0.996
0.997
0.996
0.996
0.995
0.996
0.995
153
0.993
0.995
0.995
0.996
0.996
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.997
1.000
0.999
0.998
0.997
0.997
0.996
0.997
0.996
154
0.994
0.995
0.996
0.996
0.996
0.997
0.997
0.997
0.997
0.997
0.997
0.996
0.996
0.999
1.000
0.998
0.997
0.997
0.997
0.997
0.996
155
0.995
0.995
0.996
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.997
0.998
0.998
1.000
0.999
0.998
0.997
0.998
0.997
156
0.995
0.996
0.996
0.996
0.997
0.997
0.997
0.997
0.996
0.996
0.996
0.996
0.996
0.997
0.997
0.999
1.000
0.998
0.998
0.998
0.997
157
0.995
0.996
0.996
0.996
0.997
0.997
0.996
0.996
0.996
0.995
0.995
0.995
0.996
0.997
0.997
0.998
0.998
1.000
0.999
0.998
0.998
158
0.995
0.996
0.996
0.996
0.996
0.997
0.996
0.996
0.995
0.995
0.995
0.995
0.995
0.996
0.997
0.997
0.998
0.999
1.000
0.998
0.997
159
0.996
0.996
0.996
0.997
0.997
0.997
0.996
0.996
0.996
0.995
0.995
0.995
0.996
0.997
0.997
0.998
0.998
0.998
0.998
1.000
0.999
160
0.995
0.995
0.996
0.996
0.996
0.996
0.996
0.995
0.995
0.994
0.994
0.994
0.995
0.996
0.996
0.997
0.997
0.998
0.997
0.999
1.000
Tab. 6-21 Correlazione bande Hyperion contenute nella banda 8 di ALI
Banda ALI 9
Bande
hyperion
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
193
1.000
0.999
0.992
0.991
0.993
0.993
0.993
0.991
0.991
0.989
0.986
0.983
0.981
0.982
0.984
0.986
0.991
0.992
0.992
0.991
0.990
0.988
0.990
0.987
0.981
0.970
0.972
194
0.999
1.000
0.992
0.991
0.992
0.992
0.992
0.991
0.991
0.989
0.985
0.982
0.980
0.981
0.983
0.986
0.990
0.991
0.991
0.991
0.990
0.987
0.990
0.987
0.981
0.970
0.972
195
0.992
0.992
1.000
0.999
0.993
0.993
0.992
0.991
0.990
0.988
0.986
0.983
0.981
0.982
0.984
0.986
0.991
0.992
0.992
0.991
0.990
0.988
0.990
0.987
0.981
0.969
0.973
196
0.991
0.991
0.999
1.000
0.993
0.992
0.992
0.990
0.990
0.988
0.986
0.983
0.981
0.982
0.984
0.986
0.991
0.992
0.991
0.991
0.990
0.988
0.990
0.987
0.980
0.969
0.972
197
0.993
0.992
0.993
0.993
1.000
0.999
0.993
0.992
0.991
0.989
0.987
0.984
0.981
0.983
0.985
0.987
0.991
0.992
0.992
0.991
0.991
0.988
0.990
0.987
0.981
0.969
0.972
198
0.993
0.992
0.993
0.992
0.999
1.000
0.993
0.992
0.992
0.990
0.988
0.985
0.983
0.984
0.986
0.988
0.992
0.992
0.992
0.991
0.990
0.988
0.990
0.986
0.980
0.969
0.972
199
0.993
0.992
0.992
0.992
0.993
0.993
1.000
0.998
0.993
0.991
0.989
0.987
0.985
0.986
0.988
0.990
0.993
0.992
0.992
0.991
0.991
0.989
0.990
0.987
0.981
0.970
0.973
200
0.991
0.991
0.991
0.990
0.992
0.992
0.998
1.000
0.993
0.991
0.990
0.988
0.986
0.987
0.989
0.990
0.992
0.992
0.990
0.989
0.990
0.988
0.989
0.986
0.980
0.969
0.972
201
0.991
0.991
0.990
0.990
0.991
0.992
0.993
0.993
1.000
0.998
0.992
0.990
0.989
0.990
0.990
0.991
0.994
0.993
0.990
0.989
0.991
0.988
0.989
0.985
0.980
0.969
0.972
202
0.989
0.989
0.988
0.988
0.989
0.990
0.991
0.991
0.998
1.000
0.993
0.991
0.991
0.991
0.991
0.991
0.993
0.991
0.989
0.987
0.989
0.986
0.987
0.983
0.979
0.968
0.971
203
0.986
0.985
0.986
0.986
0.987
0.988
0.989
0.990
0.992
0.993
1.000
0.998
0.992
0.992
0.992
0.992
0.992
0.989
0.987
0.986
0.985
0.982
0.985
0.982
0.976
0.966
0.969
204
0.983
0.982
0.983
0.983
0.984
0.985
0.987
0.988
0.990
0.991
0.998
1.000
0.992
0.992
0.992
0.991
0.990
0.987
0.985
0.983
0.982
0.979
0.982
0.979
0.974
0.964
0.967
205
0.981
0.980
0.981
0.981
0.981
0.983
0.985
0.986
0.989
0.991
0.992
0.992
1.000
0.999
0.993
0.991
0.990
0.986
0.983
0.981
0.981
0.979
0.980
0.977
0.973
0.962
0.966
206
0.982
0.981
0.982
0.982
0.983
0.984
0.986
0.987
0.990
0.991
0.992
0.992
0.999
1.000
0.994
0.992
0.991
0.987
0.984
0.982
0.982
0.980
0.981
0.978
0.974
0.963
0.967
207
0.984
0.983
0.984
0.984
0.985
0.986
0.988
0.989
0.990
0.991
0.992
0.992
0.993
0.994
1.000
0.998
0.991
0.988
0.986
0.984
0.984
0.982
0.985
0.981
0.974
0.964
0.968
208
0.986
0.986
0.986
0.986
0.987
0.988
0.990
0.990
0.991
0.991
0.992
0.991
0.991
0.992
0.998
1.000
0.992
0.989
0.988
0.987
0.987
0.984
0.987
0.984
0.976
0.965
0.970
209
0.991
0.990
0.991
0.991
0.991
0.992
0.993
0.992
0.994
0.993
0.992
0.990
0.990
0.991
0.991
0.992
1.000
0.998
0.992
0.991
0.991
0.989
0.990
0.987
0.982
0.971
0.974
210
0.992
0.991
0.992
0.992
0.992
0.992
0.992
0.992
0.993
0.991
0.989
0.987
0.986
0.987
0.988
0.989
0.998
1.000
0.993
0.991
0.992
0.989
0.991
0.987
0.983
0.972
0.974
211
0.992
0.991
0.992
0.991
0.992
0.992
0.992
0.990
0.990
0.989
0.987
0.985
0.983
0.984
0.986
0.988
0.992
0.993
1.000
0.998
0.990
0.987
0.991
0.987
0.982
0.971
0.974
212
0.991
0.991
0.991
0.991
0.991
0.991
0.991
0.989
0.989
0.987
0.986
0.983
0.981
0.982
0.984
0.987
0.991
0.991
0.998
1.000
0.989
0.986
0.990
0.987
0.982
0.970
0.974
213
0.990
0.990
0.990
0.990
0.991
0.990
0.991
0.990
0.991
0.989
0.985
0.982
0.981
0.982
0.984
0.987
0.991
0.992
0.990
0.989
1.000
0.998
0.989
0.986
0.982
0.971
0.973
214
0.988
0.987
0.988
0.988
0.988
0.988
0.989
0.988
0.988
0.986
0.982
0.979
0.979
0.980
0.982
0.984
0.989
0.989
0.987
0.986
0.998
1.000
0.987
0.983
0.980
0.969
0.971
215
0.990
0.990
0.990
0.990
0.990
0.990
0.990
0.989
0.989
0.987
0.985
0.982
0.980
0.981
0.985
0.987
0.990
0.991
0.991
0.990
0.989
0.987
1.000
0.997
0.979
0.968
0.973
216
0.987
0.987
0.987
0.987
0.987
0.986
0.987
0.986
0.985
0.983
0.982
0.979
0.977
0.978
0.981
0.984
0.987
0.987
0.987
0.987
0.986
0.983
0.997
1.000
0.976
0.963
0.970
217
0.981
0.981
0.981
0.980
0.981
0.980
0.981
0.980
0.980
0.979
0.976
0.974
0.973
0.974
0.974
0.976
0.982
0.983
0.982
0.982
0.982
0.980
0.979
0.976
1.000
0.994
0.964
218
0.970
0.970
0.969
0.969
0.969
0.969
0.970
0.969
0.969
0.968
0.966
0.964
0.962
0.963
0.964
0.965
0.971
0.972
0.971
0.970
0.971
0.969
0.968
0.963
0.994
1.000
0.954
219
0.972
0.972
0.973
0.972
0.972
0.972
0.973
0.972
0.972
0.971
0.969
0.967
0.966
0.967
0.968
0.970
0.974
0.974
0.974
0.974
0.973
0.971
0.973
0.970
0.964
0.954
1.000
Tab. 6-22 Correlazione bande Hyperion contenute nella banda 9 di ALI
171
Si può notare come la correlazione sia molto alta all’interno di ogni banda multispetttrale.
A titolo di confronto in Tab. 6-23 sono riportati i valori di correlazione tra le 9 bande
multispettrali del dato ALI simulato.
Bande ALI
Bande hyperion
1
2
3
4
5
6
7
8
9
1
1.000
0.972
0.961
0.941
-0.052
-0.024
0.533
0.884
0.918
2
0.972
1.000
0.995
0.982
-0.040
-0.003
0.578
0.922
0.944
0.961
0.995
1.000
0.990
-0.005
0.031
0.607
0.932
0.949
3
4
0.941
0.982
0.990
1.000
-0.039
0.013
0.626
0.947
0.950
-0.052
-0.040
-0.005
-0.039
1.000
0.984
0.608
0.046
-0.069
5
-0.024
-0.003
0.031
0.013
0.984
1.000
0.690
0.112
-0.027
6
7
0.533
0.578
0.607
0.626
0.608
0.690
1.000
0.751
0.609
0.884
0.922
0.932
0.947
0.046
0.112
0.751
1.000
0.973
8
9
0.918
0.944
0.949
0.950
-0.069
-0.027
0.609
0.973
1.000
Tab. 6-23 Correlazione bande multispettrali Ali
Si nota come la maggior parte delle bande siano fra loro poco correlate, la qual cosa sta ad
indicare la validità degli intervalli spettrali scelti per le bande di ALI in fase di progettazione.
Per quantificare la variabiltà spettrale delle bande strette interne ad una singola banda larga
del multispettrale, per ciascuna banda multispettrale è stata inoltre generata una immagine
contenente il valore di varianza della radianza al variare della lunghezza d’onda all’interno
della banda multispettrale. Di tale immagine sono state poi ricavati i parametri statistici,
Media Spaziale (cioè la media spaziale della varianza spettrale) , La Mediana spaziale, la
Moda spaziale e infine la varianza temporale delle varianze spaziali. I valori di queste
grandezze sono riportati in Tab. 6-24, insieme con media spaziale e la Standard deviation
(sempre spaziale) delle bande multispettrali da usarsi come riferimento.
ALI
1
2
3
4
5
6
7
8
9
λ
433
453
450
515
522
605
630
690
775
805
845
895
1200
1300
1550
1750
2080
2350
Spatial
Spatial
Spatial
Spatial
MEDIAN MMODE
MEAN of
SD of
of
of
Spectral
Spectral
Spectral Spectral
SD
SD
SD
SD
Spatial
MEAN
Spatial
SD
58.25
5.94
1.5
1.3
0.03
1.07
55.59
9.19
3.12
2.95
2.18
0.91
52.98
14.16
2.73
2.54
1.08
1.4
46.28
21
2.11
2.09
2.3
0.51
89.44
12.08
3.27
3.22
3.37
0.6
78.82
10.6
7.08
6.96
6.7
1.06
36.78
5.21
2.98
2.97
2.97
0.42
15.05
4.48
2.28
2.2
1.7
0.64
0.762
0.73
0.36
0.33
Tab. 6-24 Statistiche nel dominio dello spazio della Standard Deviation spettrale
all’interno delle singole bande ALI.
Si può notare come, anche in questo caso, la varianza del segnale nel dominio dello spettro
all’interno delle singole bande sia limitata.
6.8.6.1RISOLUZIONE SPETTRALE VS. RISOLUZIONE SPAZIALE
Come detto in precedenza, l’aumento del numero di bande comporta una diminuzione di
”aliasing spettrale” che degrada lo spettro acquisito. La qualità del segnale acquisito non
dipende però solo dalla quantità di aliasing introdotto, ma anche dal filtraggio spaziale
iniziale, nel senso che.l segnale acquisito è relativo alla media effettuata sul segnale
proveniente da tutto il pixel a terra, e questo origina una serie di problemi connessi con la
presenza dei cosiddetti “pixel misti”.
Tralasciando l’aspetto teorico e considerando il tutto da un punto di vista pratico, è
importante osservare che la presenza di numerose bande può permettere di discriminare nello
spettro di un pixel la presenza o no di una certa riga di assorbimento, cosa utile in quanto una
determinata banda di assorbimento è spesso legata alla presenza di una molecola specifica,
caratteristica di un certa realtà ambientale (tipo di suolo, tipo di vegetazione etc). La
rilevazione della presenza od assenza di detta banda nel segnale relativo ad un pixel
presuppone però una presenza omogenea del target o comunque adeguata all’interno del pixel
medesimo. Infatti, nel caso di pixel misti la firma spettrale di un particolare taget corre il
rischio di essere mascherata dalla operazione di media spaziale connessa con l’acquisizione.
Un’analisi delle potenzialità spettrali di un sensore iperspettrale non può quindi prescindere
da considerazioni anche sulla sua risoluzione spaziale, con particolare riferimento all’aspetto
della omogeneità dei pixel, ed è quindi intimamente legata anche al particolare ambito
applicativo ed alle esigenze dell’utente finale.
173
6.8.7 WP 620 ANALISI DI AREE INTERESSATE DA INCENDI
L’attività del WP 620 è volta all’analisi delle potenzialità delle immagini iperspettrali, in
particolare del sensore PRISMA, ai fini dello studio e del monitoraggio delle aree vegetate
interessate da incendi.
6.8.7.1APPROCCIO METODOLOGICO
La conoscenza o caratterizzazione delle aree interessate da incendio ed il monitoraggio
dell’impatto ambientale e della evoluzione degli ecosistemi naturali che ne deriva, può essere
logicamente suddiviso in più fasi di attività relative ai vari aspetti conoscitivi e operativi.
1. Allarme: individuazione dell’incendio (detection - early warning)
2. Monitoraggio in tempo-reale durante la fase di emergenza: individuazione della linea di
fuoco, misura di parametri necessari per l’utilizzazione di modelli di propagazione
dell’incendio, ecc.
3. Individuazione della presenza di punti appartenenti ad aree incendiate successivamente
alla stagione estiva, per la generazione di mappe di localizzazione delle aree percorse da
incendio.
4. Identificazione o perimetrazione accurata delle aree interessate da incendio per la
generazione periodica di mappe di inventario.
5. Caratterizzazione e stima della severità del danno per gli incendi più significativi in
termini di estensione e importanza della zona, ai fini della produzione di mappe di impatto
ambientale.
6. Monitoraggio periodico dell’evoluzione temporale degli ecosistemi naturali interessati da
incendio e delle variazioni ambientali, sia naturali sia in seguito ad interventi di ripristino.
Allo stato attuale, la fase 1) di allarme e 2) di monitoraggio in tempo reale nelle fasi di
insorgenza e di sviluppo degli incendi, non appare trarre molto vantaggio dall’impiego di dati
satellitari geostazionari e/o polari sia multi- che iper-spettrali, a causa delle insufficienti
caratteristiche di ripetitività di acquisizione unitamente alla bassa capacità di coprire vaste
estensioni di territorio con le risoluzioni spaziali adatte alla individuazione del fenomeno.
Le attività 3-6, volte alla individuazione, conoscenza, controllo e gestione della aree
interessate da incendio, possono invece trarre notevoli benefici dall’informazione veicolata da
immagini acquisite da satellite. Molti studi relativi all’utilizzo del telerilevamento
multispettrale applicato al problema delle aree incendiate, hanno portato allo sviluppo e la
validazione di numerose tecniche ed algoritmi. Alcune procedure hanno addirittura superato
la fase sperimentale e vengono da tempo impiegate a livello operativo per il monitoraggio di
vaste estensioni di territorio boschivo, in particolare nelle regioni del Nord America e del
Canada.
La letteratura è invece più scarsa per quanto riguarda l’utilizzo di dati iper-spettrali. Questo
può essere imputabile allo sviluppo relativamente recente delle tecnologie di telerilevamento
iperspettrale ed anche al fatto che gli studi sui dati multispettrali hanno già portato a
conclusioni significative e per molti scopi applicativi considerate già adeguate per determinati
obiettivi.
La valutazione delle potenzialità del dato di telerilevamento iperspettrale, anche in
confronto al dato multispettrale, nel contesto della conoscenza e del monitoraggio delle aree
interessate da incendio, a tutt’oggi non appare molto approfondito in letteratura e rimane
dunque una questione ancora aperta. Peraltro, sebbene sia evidente che le immagini di
telerilevamento iperspettrale contengano una informazione superiore al multispettrale, ciò non
ne definisce a priori la sua utilità nel contesto delle problematiche inerenti gli incendi naturali,
174
ed il suo valore potenziale aggiunto non è immediatamente quantificabile, a causa delle
caratteristiche particolari, tipiche del fenomeno degli incendi. Allo stato attuale delle cose,
infatti, risulta difficile definire un generico parametro dell’immagine che sia rappresentativo
di una misura di qualità nello specifico settore dell’analisi delle aree incendiate.
6.8.7.2Caso di studio
Una analisi visiva interpretativa delle immagini multitemporali acquisite dai sensori ALI,
Hyperion ed ETM+ il 12 luglio, il 14 settembre ed il 30 settemrbe 2002, ha chiaramente
evidenziato nella zona di Capalbio in Toscana, selezionata come area test, la presenza di
un’area interessata da un incendio avvenuto in data antecedente al 12 luglio (Fig. 6.73 a),
corrispondente al primo passaggio satellitare della sequenza multitemporale. Questo deriva
non solo dalla presenza, all’interno di una zona fortemente vegetata dell’immagine
multispettrale del 12/07, di un’area la cui firma spettrale si differenzia dal contesto ed è
caratteristica della risposta della cenere e del materiale ligneo carbonizzato, ma anche
dall’evoluzione temporale delle caratteristiche spettrali della stessa area nelle successive
immagini del 14 e del 30 settembre, acquisita quest’ultima solo dal sensore ETM+ (Fig. 6.73)
a)
12/07/2002
b) 14/09/2002
c)
30/09/2002
Fig. 6.73 Particolare dell’area di studio relativo ad una zona interessata da incendio indicata
dal crocifilo (immagini ETM+ in falso colore RGB=543).
Mentre nella zona indicata dal crocifilo nella Fig. 6.73a si evidenzia la discontinuità
spettrale tra copertura vegetale ed area incendiata, la scena acquisita due mesi dopo (Fig.
6.73b) indica chiaramente come ci sia stata una forte ricrescita della copertura vegetale
(colore verde) che, in maniera naturale, tende a decrescere con l’inizio della stagione
autunnale Fig. 6.73c.
Questo evento di incendio rappresenta quindi il caso di studio su cui è stato basato lo
sviluppo della sperimentazione. In particolare, mediante un’analisi comparata
dell’informazione iperspettrale con le corrispondenti immagini multispettrali, si intende
caratterizzare la validità delle immagini a banda stretta non solo per quanto riguarda
l’identificazione e la perimetrazione accurata dell’area percorsa da incendo, ma anche
l’analisi del danno, nonché dell’evoluzione spontanea della copertura vegetale.
Purtroppo per tale zona non è disponibile nessuna informazione riguardante la verità a
terra, ed in effetti l’area considerata non è nemmeno inserita in un catalogo delle zone
interessate da incendi redatto annualmente dalla organizzazione operativa regionale toscana
AntIncendi Boschivi (AIB). Per ovviare a questa lacuna è stata presa in considerazione anche
una seconda area, sempre presente nello stesso dato Hyperion ed ETM+ ma fuori dalla zona
acquisita dal sensore ALI, in cui è presente un’area che viene riportata come incendiata nel
175
catalogo AIB precedentemente citato; la presenza della cartografia tematica AIB ci permette
di datare l’incendio al 08/07/2002, data molto prossima al primo dato disponibile, risalente al
12/07/2002; purtroppo nessuna informazione viene fornita riguardo ad una valutazione in-situ
della fire severity. Questa seconda area di studio è mostrata in Fig. 6.57; in particolare,
nell’immagine a) viene mostrata l’immagine ETM+ acquisita il 12/07/2002, mentre in c)
viene mostrata l’immagine ETM+ acquista dopo circa due mesi, il 14/09/2002. L’immagine
b) riporta invece il dato ETM+ simulato a partire dal dato iperspettrale Hyperion acquisito
sempre il 12/07/2002. L’immagine conferma qualitativamente quello che è stato
quantitativamente osservato, e quanto riportato in letteratura, e cioè che dato originale e dato
simulato sono molto simili con la permanenza di un errore residuo. Parimenti è evidente una
ricrescita delle aree vegetate nei due mesi dopo l’incendio.
a)
b)
c)
Fig. 6.74 Particolare della seconda area di studio relativo ad una zona classificata come
incendiata (immagini in falso colore RGB=543). A) Dato ETM+ relativo al 12/07/2002; b)
dato ETM+ simulato a partire dal dato Hyperion acquisito sulla stessa sempre il 12/07/2002
a distanza di pochi secondi e con la stessa geometria di acquisizione; c) Dato ETM+
acquisito sulla stessa area il 14/09/2002.
176
Perimetrazione delle aree interessate da incendio
La perimetrazione delle aree interessate da incendi è una attività di primaria importanza
per la valutazione dell’impatto ambientale e per le politiche di gestione del territorio, ed in
Italia essa risponde anche ai dettami di una apposita legge che impone ai Comuni la
realizzazione di una mappa delle aree incendiate. Purtroppo, per vari motivi, tale richiesta è
spesso trascurata dai comuni ed, ove realizzata, è perfezionata con tecniche di perimetrazione
in-situ che si rivelano costose e dotate di una accuratezza che risulta variare dipendentemente
dal contesto ambientale e dall’operatore. La perimetrazione di aree percorse da incendi a
partire da dati telerilevati da piattaforma satellitare è dunque è una tematica di notevole
interesse applicativo.
Il riconoscimento di un’area interessata da incendio mediante l’impiego di immagini di
telerilevamento comporta, da un lato, la necessità di controllare il territorio di interesse in
tutta la sua estensione, al fine di individuare la presenza dell’area dove si è verificato
l’incendio sulla base di determinate caratteristiche spettrali; dall’altro, la necessità di poter
analizzare ed individuare l’area interessata con elevata accuratezza, compatibile con le
caratteristiche di risoluzione del sensore impiegato. Quindi, mentre la fase di rivelazione della
presenza di un’area incendiata può essere condotta con metodi ed algoritmi meno precisi,
l’analisi che vuole portare alla perimetrazione in dettaglio dell’area di interesse, necessita di
metodi più raffinati.
L’approccio metodologico che è stato scelto per l’analisi e lo studio delle potenzialità del
dato iperspettrale nel contesto della perimetrazione delle aree interessate da incendi è basato
su una serie di step successivi. La prima fase è volta ad eseguire una analisi statistica della
discriminabilità del fenomeno (presenza di aree percorse da incendio) mediante l’utilizzo di
singole bande del dato multispettrale. Tale valutazione è stata fatta considerando il dato
simulato ALI, in modo da evitare il più possibile problemi di intercalibrazione e permettere
una più facile comparazione con eventuali risultati provevienti dalle bande strette di
Hyperion. Scopo primario di questa attività è quello di controllare la coerenza fra il dato ALI
simulato ed il dato ETM+, in modo da permettere l’eventuale utilizzo o adattamento per i dati
ALI di metodi e conclusioni sviluppate sulla base dell’impiego del dato TM/ETM+ .
A tale scopo, sul dato ALI simulato è stato individuato un sottoinsieme spaziale formato
da tre classi omogenee di punti, composte rispettivamente da pixel relativi a suolo nudo, pixel
relativi a suolo vegetato e pixel relativi ad aree percorse da incendio. La valutazione della
discriminabilità fra le tre classi all’interno di una singola banda multispettrale è stata fatta in
maniera quantitativa ricorrendo ad un semplice algoritmo a soglia e valutando
quantitativamente le prestazioni in termini di errore di commissione ed omissione. Tale
attività è stata poi estesa alla valutazione delle prestazioni offerte da un indice normalizzato,
quale il Normalized Burn Ratio (NBR) applicato ad una coppia di bande multispettrali del
dato ALI simulato.
6.8.7.2.1 SELEZIONE DELLE AREE CAMPIONE
VEGETATO, SUOLO BRUCIATO
DELLE CLASSI SUOLO NUDO, SUOLO
Basandosi su una ispezione visiva sono state individuate delle aree di riferimento di tre
tipi, e cioè composte in maggior parte da pixels rispettivamente appartenenti alle tre classi:
vegetato, suolo nudo e aree incendiate. Per quanto riguarda le aree incendiate è stata
utilizzata la popolazione dei pixel appartenenti al caso di studio descritto, che interessa
un’area di circa 3,2 ettari (Fig. 6.75)
177
Fig. 6.75 Delimitazione dell’area interessata da incendio.
Per ciascuna delle classi suolo nudo e vegetato, sono state selezionate quattro aree come
riferimento della tipologia, in base alla caratteristica di omogeneità ( Fig. 6.76 e Fig. 6.77) e
appartenenza, anche se risulta evidente come ciascuna area non sia composta esclusivamente
da pixel riconducibili alla classe di riferimento. Tale scelta rappresenta un compromesso tra
purezza e estensione dell’area di riferimento, in modo da potere disporre di un numero di
pixel statisticamente sufficiente per ciascuna classe. Questo si è reso necessario a causa delle
caratteristiche della copertura, notevolmente frammentata nelle diverse classi e con un elevato
livello di aree miste.
Fig. 6.76 Aree campione di riferimento della classe “vegetato”.
178
Fig. 6.77 Aree campione di riferimento della classe “suolo nudo”.
In aggiunta alle classi precedentemente citate, sono stati presi in considerazione anche una
serie di spettri di riflettanza acquisiti in laboratorio; in particolare si è fatto riferimento agli
spettri usati in letteratura da Chuvieco per la valutazione della fire severity a partire da dati
satellitari. Sono stati quindi aggiunti 5 spettri campione, gentilmente forniti da Chuvieco con
una risoluzione spettrale di 10 nm e relativi alle classi “green leaf”, “Brown leaf”, “Soil”,
“Light_Charcoal” e “Dark_Charcoal”. Per esigenze di analisi e confronto con le immagini del
data set iperspettrale i suddetti spettri sono stati ricampionati sulle frequenze centrali delle
bande del dato hyperion, per mezzo di una semplice interpolazione lineare fra i due valori
relativi ai centri banda spettralmente più vicini.
6.8.7.2.2
DISCRIMINABILITÀ DELLE AREE
MULTISPETTRALE A BANDA LARGA
INCENDIATE
MEDIANTE
L’INFORMAZIONE
La valutazione della discriminabilità delle aree interessate da incendio nelle immagini a
banda larga simulate del sensore multispettrale ALI è stata inizialmente basata sull’analisi
delle distribuzioni di radianza di ciascuna banda, generando tre istogrammi distinti per
ciascuna banda spettrale, relativi alle tre classi considerate nelleFig. 6.75, Fig. 6.76, e Fig.
6.77.
In funzione della posizione reciproca degli istogrammi, è stata poi effettuata una
discriminazione ricorrendo ad un classico algoritmo a soglia e valutando in maniera
quantitativa le potenzialità della banda in termini di errori di omissione e commissione. Per
completezza di studio, la valutazione è stata fatta in maniera separata per la discriminabilità
fra aree bruciate e aree vegetate e quella fra aree bruciate ed aree con suolo nudo. Questo
perché in alcune bande l’istogramma delle aree incendiate si colloca dalla stessa parte
rispetto all’istogramma delle altre due classi di vegetato e suolo nudo, mentre in altre assume
una posizione intermedia. Per queste ultime è dunque necessario fare una discriminazione
basata su due differenti soglie, mentre per le prime bande è possibile utilizzare una sola soglia
per effettuare entrambe le discriminazioni. In quest’ultimo caso, si possono diversificare con
una sola soglia due macroclassi, quella delle aree incendiate e quella delle aree non incendiate
179
(dove quest’ultima è composta dall’unione delle due classi relative al vegetato ed al suolo
nudo).
La fig. 5 mostra le distribuzioni di radianza delle singole bande del dato ALI simulato,
relative alle tre classi considerate. Mentre gli istogrammi delle bande 1 e 7 risultano
sovrapposti, le distribuzioni di radianza delle altre banda coprono differenti intervalli di
radianza spettrale per la maggioranza dei punti appartenenti alle tre classi incendiato, vegetato
e suolo nudo, anche se una parte minore di sovrapposizione è sempre presente.
In particolare, la distribuzione della classe incendiato delle bande 2, 3, 4, 8 e 9 (Fig. 6.78),
si trova in posizione centrale rispetto alle altre due classi suolo nudo e vegetato che, avendo
valori di radianza rispettivamente minori e maggiori rispetto alle aree incendiate, hanno i
loro istogrammi posizionati a sinistra ed a destra della classe incendiato.
Nelle bande 5 e 6, la classe delle aree interessate da incendio presenta invece una
distribuzione di valori di radianza inferiori alle altre due classi, le cui distribuzioni hanno
valori di radianza più elevati sovrapposti sullo stesso intervallo. Di conseguenza, i metodi a
soglia singola permettono in questo caso di discriminare la classe delle aree incendiate dalle
altre due con una elevata accuratezza.
Vegetated Areas
Bare soil areas
Burned Areas
Vegetated Areas
Burned Areas
Bare soil areas
40
35
35
35
30
30
30
25
25
25
20
15
10
5
Number of Pixels
40
Number of Pixels
Number of Pixels
Burned Areas
Histograms classified areas band 3 ALI simulated
Histograms classified areas band 2 ALI simulated
Histograms classified areas band 1 ALI simulated
40
20
15
0
20
40
60
80
100
120
10
5
0
0
20
40
60
100
120
0
140
B1
B2
Vegetated Areas
Bare soil areas
Burned Areas
Vegetated Areas
Burned Areas
Bare soil areas
30
25
25
25
Number of Pixels
35
30
Number of Pixels
35
30
15
20
15
10
10
5
5
0
20
40
60
80
100
120
0
140
20
40
B4
60
Burned Areas
100
120
140
B6
Histograms classified areas band 9 ALI simulated
Histograms classified areas band 8 ALI simulated
Bare soil areas
80
2
B5
Histograms classified areas band 7 ALI simulated
Vegetated Areas
Bare soil areas
Radiance [Watt / m sr micron]
2
Radiance [Watt / m sr micron]
Vegetated Areas
Burned Areas
Bare soil areas
50
30
Vegetated Areas
0
0
150
140
15
5
50
75
100
125
Radiance [Watt / m2 sr micron]
120
20
10
0
100
B3
35
20
80
Histograms classified areas band 6 ALI simulated
Histograms classified areas band 5 ALI simulated
40
Burned Areas
60
2
40
25
40
Radiance [Watt / m sr micron]
40
0
20
2
Histograms classified areas band 4 ALI simulated
Number of Pixels
80
Radiance [Watt / m sr micron]
2
Radiance [Watt / m sr micron]
Burned Areas
15
5
140
Bare soil areas
20
10
0
0
Vegetated Areas
Vegetated Areas
Bare soil areas
60
45
25
50
40
35
15
10
Number of Pixels
40
Number of Pixels
Number of Pixels
20
30
25
20
30
20
15
10
5
10
5
0
0
0
10
20
30
40
2
Radiance [Watt / m sr micron]
B7
50
60
70
0
0
5
10
15
20
2
Radiance [Watt / m sr micron]
B8
180
25
30
35
0
1
2
3
4
2
Radiance [Watt / m sr micron]
B9
5
6
7
Fig. 6.78 Distribuzione di occorrenza della radianza delle bande del sensore ALI,
relativamente alle aree campione delle tre classi di vegetato, suolo nudo e aree incendiate.
Al contrario, le bande 2,3,4,8 e 9, necessitano di metodi basati su almeno due soglie: la
prima, per discriminare le aree bruciate dalle aree vegetate; la seconda per distinguere le aree
bruciate dai suoli nudi.
In generale, le prestazioni di una tecnica a soglia sono valutate ricorrendo alla stima delle
percentuali di falsi positivi (errore di commissione) e di falsi negativi (errore di omissione). In
questo caso, i falsi positivi sono i pixel relativi ad aree vegetate e di suolo nudo che vengono
classificati erroneamente come incendiati. Viceversa, i falsi negativi si riferiscono ai pixel
corrispondenti ad aree incendiate, che vengono erroneamente classificati come vegetati o
suolo nudo.
La Fig. 6.79 mostra, i grafici dell’errore di commissione e di omissione per le bande 1-4 e
6-9 di ALI in funzione del valore di soglia, che permettono quindi di valutare la capacità di
discriminazione di ciascuna banda relativamente alle classi: A) aree incediate-vegetazione,
B) aree incendiate-suolo nudo.
BANDA 1
Discrimination burned/bare soil
threshold band 1
Discrimination burned/vegetated
threshold band 1
False positive
False negative
120
100
100
Percentage of error
Percentage of error
False negative
120
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
10
20
30
40
50
60
70
80
90
100
Threshold value
Threshold value
BANDA 2
Discrimination burned/bare soil
threshold band 2
Discrimination burned/vegetated
threshold band 2
False negative
False positive
120
100
100
Percentage of error
Percentage of error
False negative
120
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
10
20
30
40
50
60
Threshold value
Threshold value
BANDA 3
181
70
80
90
100
Discrimination burned/vegetated
threshold band 3
False negative
Discrimination burned/bare soil
threshold band 3
False negative
False positive
100
Percentage of error
120
100
Percentage of error
120
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
10
20
30
40
50
60
70
80
90
100
80
90
100
Threshold value
Threshold value
BANDA 4
Discrimination burned/vegetated
threshold band 4
False positive
False negative
120
120
100
100
Percentage of error
Percentage of error
False negative
Discrimination burned/bare soil
threshold band 4
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
Threshold value
40
50
60
70
Threshold value
BANDA 7
Discrimination burned/vegetated
threshold band 7
False negative
Discrimination burned/bare soil
threshold band 7
False positive
False negative
120
120
100
100
Percentage of error
Percentage of error
False positive
80
60
40
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
10
20
30
Threshold value
40
50
60
70
80
90
100
80
90
100
Threshold value
BANDA 8
Discrimination burned/vegetated
threshold band 8
False positive
False negative
120
120
100
100
Percentage of error
Percentage of error
False negative
Discrimination burned/bare soil
threshold band 8
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
Threshold value
Threshold value
BANDA 9
182
70
Discrimination burned/bare soil
threshold band 9
Discrimination burned/vegetated
threshold band 9
False negative
False positive
120
100
100
Percentage of error
Percentage of error
False negative
120
80
60
40
False positive
80
60
40
20
20
0
0
0
1
2
3
4
0
5
1
2
Threshold value
3
4
5
Threshold value
A)
B)
Fig. 6.79 Percentuale di falsi positivi (viola) e falsi negativi (blu) in funzione della soglia per
le bande 1-4 e,7-9 del sensore ALI, relativamente alle classi: (A) incendio e vegetato, (B)
incendio e suolo nudo.
Poiché le distribuzioni di radianza delle bande 5 e 6 relativamente alle aree vegetate ed al
suolo nudo hanno ambedue valori inferiori alla distribuzione delle aree percorse da incendio,
in Fig. 6.80 vengono riportati anche i grafici relativi alla discriminazione complessiva aree
incendiate/non-incendiate in funzione di una singola soglia, dove per aree non-incendiate si
intende l’unione degli insiemi di punti di riferimento appartenenti alle classi suolo nudo e
vegetato (fig. 6c). Di conseguenza, la classificazione delle aree incendiate basata su queste
bande (5 e 6), può essere conseguita mediante metodi a singola soglia.
Discrimination burned/vegetated
threshold band 5
False negative
False positive
120
120
100
100
Percentage of error
Percentage of error
False negative
Discrimination burned/bare soil
threshold band 5
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
10
20
30
40
50
60
Threshold value
Threshold value
a)
b)
Discrimination burned/unburned
threshold band 5
False negative
False positive
120
100
80
BANDA 5
60
40
20
0
0
10
20
30
40
50
60
70
80
90
100
c)
183
70
80
90
100
Discrimination burned/bare soil
threshold band 6
Discrimination burned/vegetated
threshold band 6
False positive
False negative
120
100
100
Percentage of error
Percentage of error
False negative
120
80
60
40
False positive
80
60
40
20
20
0
0
0
10
20
30
40
50
60
70
80
90
0
100
Threshold value
6
a)
10
20
30
40
50
60
70
80
90
100
Threshold value
b)
Discrimination burned/unburned
threshold band 6
False negative
False positive
120
100
BANDA 6
80
60
40
20
0
0
10
20
30
40
50
60
70
80
90
100
c)
Fig. 6.80 Percentuale di falsi positivi (viola) e falsi negativi (blu) nella discriminazione
con soglia tra le classi: a) incendiato, vegetato, b) incendiato, suolo nudo, c) incendiato, nonincendiato, relativamente alle bandi 5 e 6 del sensore ALI.
Osservando gli istogrammi di figura 4 e le curve delle figure 5 e 6 è possibile notare come
nelle bande 5 e 6 di ALI, corrispondenti alla banda 4 del sensore ETM+, le zone interessate da
incendio presentino una radianza statisticamente più bassa di quella delle aree vegetate e di
suolo nudo, utilizzate come riferimento. Questo è confermato dal fatto che per tali bande
esistono valori di soglia che permettono di ottenere contemporaneamente bassi valori di errore
di commissione e di omissione. (Fig. 6.80).
Anche nella banda 9 di ALI (corrispondente alla banda 7 di ETM+) si ha nuovamente una
buona separabilità tra zone incendiate e zone vegetate, anche se tale caratteristica non è
altrettanto valida nel caso della distinzione tra zone incendiate e suolo nudo. Infatti, la
radianza delle aree vegetate è statisticamente maggiore di quella delle aree bruciate.
L’analisi delle caratteristiche delle bande ALI, osservate nel caso particolare dell’area di
studio di Capalbio, confermano le relazioni spettrali sulle quali sono state sviluppate varie
tipologie di metodi volti alla individuazione di aree interessate di incendio, tra i quali l’indice
NBR (Normalized Burn Ratio), sviluppato sulle bande NIR e SWIR del sensore TM/ETM+:
NBRETM
4 7
4 7
Dove 4 e 7 rappresentano le riflettanze rispettivamente delle bande TM/ETM+ 4 e 7.
Dall’analisi statistica delle bande ALI, risulta che lo stesso tipo di indice è teoricamente
valido, anche utilizzando i dati ALI. Poiché all’intevallo spettrale della banda 4 TM/ETM+
corrispondono due bande di ALI più strette (5 e 6), le quali hanno caratteristiche simili (fig. 4
184
e fig. 6), è possibile definire due diverse implemetazioni dell’indice NBR, basate sulle bande
ALI:
5, 9
NBR ALI
5 9
5 9
6,9
NBR ALI
6 9
6 9
5, 9
6,9
La valutazione dell’efficienza dei due indici NBRALI
e NBRALI
è stata effettuata sulla base
sempre degli errori di commissione e di omissione in funzione della soglia, misurati nell’area
di studio.
Dalle curve di errore riportate nella Fig. 6.81, si può osservare che l’indice più efficiente
6, 9
risulta essere NBRALI
, in quanto le percentuali di errore risultano inferiori, anche se di poco,
all’altro indice.
Discrimination burned/not burned
threshold NBR ALI
110
105
100
95
90
85
80
75
70
P
e
rc
e
n
ta
g
eo
fe
rro
r
65
60
False negative NBR 5-9
False positive NBR 5-9
55
False negative NBR 6-9
False positive NBR 6-9
50
45
40
35
30
25
20
15
10
5
0
0.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
Thre shold va lue
Fig. 6.81 Errori di omissione e commissione relativi all’applicazione dei due
5, 9
6,9
e NBRALI
basati sulle bande ALI.
indici NBRALI
185
6.8.7.2.3 FIRE ASSESSMENT CON PROCEDURA MESMA
La stima della Fire severity è una applicazione molto importante nel campo del
telerilevamento, e quindi la valutazione delle prestazioni ottenute in questo settore dal dato
iperspettrale è di notevole importanza per misurare le sue potenzialità applicative. Come
precedentemente affermato, non disponendo della verità a terra riguardanti la fire severity
delle aree di test considerate, si è concentrato l’attenzione su una valutazione relativa, basata
cioè sulla comparazione qualitativa delle prestazioni ottenute utilizzando il dato iperspettrale e
quello multispettrale. Per questo scopo è stata sviluppata una procedura basata sull’approccio
conosciuto in letteratura con l’acronimo MESMA (Multiple Endmember Spectral Mixture
Analysis (MESMA), che classifica i pixel dell’immagine analizzata sulla base del confronto
dei loro spettri con un set di spettri di riferimento. La procedura messa in atto consta in
particolare di più passi, come evidenziato anche in Fig : 6.62
Fig. 6.82 Valutazione della Fire Severity a partire da dati iperspettrrali o multispettrali
186
Pre-processing dei dati di partenza:
Il metodo MESMA prevede il confronto fra l’immagine da classificare e degli spettri
campione; nel nostro caso come spettri campione sono stati adottati spettri di laboratorio,
forniti ovviamente in riflettanza; è stato dunque necessario effettuare una operazione di
calibrazione radiometrica delle immagini considerate in modo da lavorare sempre in
riflettanza. Tale calibrazione è stata effettuata tenendo conto della geometria e dell’ora di
acquisizione, ma senza effettuare una correzione atmosferica; questo perché le acquisizioni
considerate sono tutte pressoche contemporanee ed effettuate con cielo terso, per cui
l’influsso dell’atmosfera si può considerare piccolo e comunque costante.
La valutazione delle prestazioni ottenute nella stima della Fire severity usando un dato
iperspettrale in confronto a quelle ottenute in un analogo compito con un dato multispettrale
richiederebbe la ovvia presenza di due dati, uno iperspettrale ed uno multispettrale, acquisiti
contemporaneamente, con la stessa geometria di acquisizione e con la stessa risoluzione sulla
stessa zona. Questa condizione è fondamentale per poter ricondurre le eventuali discrepanze
nelle prestazioni applicative alla natura intrinseca del dato, e cioè alla sola differenza nel
numero di bande disponibili; la contemporaneità di acquisizione unita alla somiglianza della
geometria permettono infatti di escludere una serie di possibili effetti quali quelli dovuti ad un
diverso impatto dell’atmosfera, dell’irraggiamento solare e della distorsione del pixel a terra
sul dato acquisito. Nella pratica la coppia di dati Hyperion – ALI si è rivelata simile a quella
ideale, in quanto i sensori sono montati sulla stessa piattaforma satellitare; purtroppo tale
configurazione non permette di escludere uno shift relativo fra i lattici di acquisizione, cosa
che può introdurre discrepanze dovute alla presenza di effetti di aliasing diversi, essendo
notoriamente l’aliasing un fenomeno shift-dependent; a questo bisogna aggiungere gli
eventuali problemi di intercalibrazione radiometrica che possono comparire in fase di preprocessing del dato. Lo stesso problema è stato riscontrato per la coppia Hyperion – ETM+,
per la quale si deve tenere in conto anche della differenza di piattaforma di acquisizione,
anche se l’acquisizione viene fatta da una orbita analoga a pochi secondi di distanza. L’analisi
comparata dei dati Hyperion, ALI ed ETM+ ha confermato il problema, evidenziando, come
era lecito attendersi, una differenza non insignificante fra i due dati. Per tale motivo si è
deciso di perfezionare il confronto fra il dato iper-spettrale di partenza (Hyperion) ed un dato
multispettrale simulato a partire dal dato iper-spettrale, in modo da poter evidenziare solo le
differenze dovute al differente numero di bande. Le varie tecniche di simulazione di un dato
multi-spettrale a partire da un dato iper-spettrale sono state quindi analizzate e testate, in
modo da valutare i vantaggi offerti dai metodi più complessi, come quelli basati sulla
conoscenza delle MTF spettrali dei sensori in gioco, rispetto a quelli più semplici, come quelli
basati sull’adozione del valore della banda iperspettrale più vicina al centro della banda
iperspettrale da simulare, passando per soluzioni intermedie come quelle da noi proposte nel
paragrafo, basate cioè su una media spettrale pesata delle bande iperspettrali comprese nella
banda multispettrale da simulare.
La discrepanza riscontrata fra i metodi si è rivelata nel caso da noi analizzato molto bassa,
(ordine dell’ 1%) e quindi si è deciso di adottare indifferentemente due metodi: per la
generazione delle immagini multispettrali simulate si è usata la simulazione che tiene conto
dell’MTF dei sensori (quello del sensore iperspettrale con cui sono stati acquisiti i dati di
partenza e quello del multispettrale da simulare); per gli spettri di riferimento, che sono di
laboratorio e non danno informazione sull’MTF con cui sono acquisiti, si è adottata una
soluzione più semplice basata su una media dei campioni delle bande iperspettrali contenute
nella banda multi-spettrale da simulare, con l’accortezza di pesare in maniera proporzionale le
bande iperspettrali che sono solo parzialmente contenute nella banda multispettrale.
Dovendo decidere quale tipo di dato multispettrale simulare, si è deciso di simulare un dato
di cui si avevano anche immagini disponibili, quindi ALI o ETM+ , e fra questi due è stato
187
scelto ETM+, in quanto rispetto al dato ALI il dato ETM+ gode di una maggiore presenza di
lavori applicativi in letteratura. L’immagine ETM+ simulata è stata generata con una
procedura relizzata con il Modeler di Imagine, un programma di elaborazioni di immagini
telerilevate. Una operazione di verifica fatta fra un dato ETM+ simulato dal dato Hyperion e
un dato ETM+ effettivamente acquisito dalla stessa trettoria di Hyperion a distanza di pochi
ha permesso di validare ulteriormente la bontà della simulazione, in quanto la differenza
riscontrata fra dato ETM simulato e dato ETM effettivo si è rivelata piccola (e comparabile
con la differenza fra il dato ETM originale ed il dato ALI acquisito insieme al dato Hyperion
?????).
Per quanto riguarda gli spettri di riferimento, partendo da una libreria più estesa si è deciso
di adottare un set composto da 6 spettri di laboratorio, riferiti rispettivamente alle classi
“Green leaf”, “Brown Leaf”, “Soil”, “Light Charcoal” e “Dark Charcoal”, comunemente usati
nei lavori relativi alla stima della Fire Severity. Come precedentemente anticipato, questi
spettri sono stati forniti ad una risoluzione spettrale di 10 nm, e quindi è stata preventivamente
effettuata una operazione di ricampionamento sulle frequenze centrali delle bande di
Hyperion. I nuovi spettri sono stati quindi utilizzati per simulare, con la prcedura di media
pesata descritta precedentemente, due equivalenti set multi-spettrali di riferimento, uno
definito sulle frequenze delle bande di ALI e uno su quelle di ETM+.
Come si può vedere in Fig. 6.67 il risultato ottenuto mostra come i campioni multispettrali
simulato siano praticamente sovrapponibili al grafico del dato iperspettrale di partenza,
confermando la bontà del metodo adottato.
700.00
Iper_Green‐Leaf
Iper_Dark‐Charcoal
Multi_Brown‐leaf
600.00
Iper_Brown‐Leaf
Iper_Light‐charcoal
Multi_Soil
Iper_Soil
Multi_Green‐leaf
Multi_Light‐Charcoal
500.00
400.00
300.00
200.00
100.00
0.00
0.0
500.0
1,000.0
1,500.0
2,000.0
2,500.0
3,000.0
Fig. 6.83 Spettri campione (in riflettanza moltiplicata * 1000).
Poiché la generazione degli spettri di riferimento multispettrali è stata fatta ricorrendo ad
una simulazione comparabile con quella adottata per generare i dati ALI simulato ed ETM+
simulato, ciascuna immagine multispettrale simulata potrà essere coerentemente comparata
con il proprio set di spettri campione.
188
Per escludere possibili problemi legati ad una possibile scarsa intercalibrazione fra dati
analizzati e spettri campione di libreria adottati, il set di spettri campione è stato ulteriormente
integrato con spettri iperspettrali presi direttamente dall’immagine Hyperion analizzata e
scelti come campioni “interni”. In particolare si è scelto di adottare come spettro campione
delle zone vegetate la media fra gli spettri dei pixel caratterizzati da un valore dell’indice
NDVI superiore a 0,3 , mentre la media degli spettri dei pixel aventi valori di NDVI inferiori
a 0,2 è adottata come spettro campione dei suoli nudi. Naturalmente queste due classi adottate
sono estremamente popolate, sicuramente non pure ed anche non molto omogenee; i pixel
scelti per rappresentare la vegetazione infatti vanno da pixel completamente vegetati a pixel
con solo una frazione di terreno coperta dalla vegetazione, mentre la classe dei suoli nudi
risulterà contaminata anche dai pixel delle aree bruciate; a questo bisogna poi aggiungere la
presenza dei pixel delle aree urbane, che contamineranno le due classi. Nonostante ciò, le aree
urbanizzate e quelle incendiate sono numericamente esigue, e quindi poco significative dal
punto di vista della media. Pertanto la scelta fatta è stata ritenuta accettabile per una prima
fase dell’analisi.
In Fig. 6.68 sono riportati gli spettri campione “interni” relativi al suolo vegetato insieme
al relativo spettro di riferimento di laboratorio. L’osservazione dei grafici permette di
evidenziare un andamento relativamente coerente fra gli spettri acquisiti dall’immagine e
quelli di laboratorio, anche se lo spettro di laboratorio presenta un andamento molto più dolce,
tendenzialmente più alto e privo di bande di assorbimento evidenti in quanto non afflitto dagli
effetti dell’atmosfera. Discorso analogo per la figura 6,69, nella quale si riportano gli sepettri
di campione “interni” e quelli di laboratorio per le arre vegetate. Da notare come gli spettri di
laboratorio sono due, uno relativo alla vegetazione “chiara” e uno a quella “più scura”, mentre
dal punto di vista del training set è presente un unico spettro.
700.00
600.00
Reflectance
500.00
400.00
300.00
200.00
100.00
0.00
400.0
900.0
1,400.0
1,900.0
2,400.0
nm
Green leaf
Brown leaf
Vegetation training set
Fig. 6.84 Spettri di riferimento “interni” e di libreria relativi al suolo vegetato.
189
500.00
Reflectance
400.00
300.00
200.00
100.00
0.00
400.0
900.0
1,400.0
1,900.0
2,400.0
nm
Soil
Soil training set
Fig. 6.85 Spettri di riferimento “interni” e di libreria relativi al suolo nudo.
Partendo dal set di spettri di riferimento (di libreria e “interni”), il metodo implementato
permette di incrementare il suddetto set con altri spettri di riferimento, sia di libreria che presi
dai pixel dell’immagine da analizzare. Una volta definito il set di partenza, è possibile poi
selezionare un sottoinsieme di questi spettri da usare effettivamente per l’analisi
dell’immagine considerata; gli spettri di questo sottoinsieme vanno a costituire gli “endmembers” del metodo proposto. Naturalmente, ad ogni set di end-members scelto dall’utente
nel campo iperspettrale, il metodo proposto fa corrispondere un set analogo nel campo
multispettrale; ad ogni end-member iperspettrale infatti viene associato un end-member
multispettrale ottenuto simulando quest’ultimo a partire dal primo. Questi end-members (sia
quelli iperspettrali che quelli multispettrali) vengono combinati linearmente fra di loro per
generare un nuovo set di spettri rappresentativi di varie classi di pixel misti, che va a costituire
una look-up-table (LUT). Ogni spettro di questa look-up-table è dunque generato da una
diversa combinazione lineare degli end-members pesati secondo un numero finito di
combinazioni predefinite. Tali combinazioni sono ottenute facendo variare in maniera discreta
e omogenea i pesi, con il vincolo che la somma dei pesi risulti unitaria; il numero possibile di
pesi da adottare (e quindi il passo fra i pesi) viene specificato dall’utente. Questo vuol dire
che se viene scelto un numero di pesi pari a 5, i pesi adottati saranno 0.00; 0.25; 0.5; 0.75;
1.00 , mentre se viene scelto un numero pari a 3, i pesi saranno solo 0.00; 0.50; 1.00 .
Naturalmente all’aumentare del numero di pesi, aumentano anche le possibili combinazioni,
così come se viene aumentato il numero degli end-members A titolo di esempio in tabella
6.23 sono riportate le 6 combinazioni adottate nel caso di 3 end-member con numero di pesi
pari a 3
Combinazione # 1 2 3 4 End‐member 1 1.00 0.50 0.00 0.50 End‐member 2 0.00 0.50 1.00 0.00 190
End‐member 3 0.00 0.00 0.00 0.50 5 6 0.00 0.00 0.50 0.00 0.50 1.00 Tab. 6.23 Combinazione di pesi per tre end-members e tre possibili livelli di peso.
Ognuna delle combinazioni di peso originerà uno spettro rappresentativo di una certa classe
mista. La combinazione n. 4 della tabella 6.23, e cioè [0.50; 0.00; 0.50] sarà ad esempio
rappresentativa di un pixel misto con composizione data da un 50% ascrivibile all’endmember 1 e da un altro 50% ascrivibile all’end-members 3, con assenza totale nella
composizione dell’end-members 2; la combinazione 3 sarà viceversa da ascrivere a un pixel
“puro” riferibile completamente all’end-member 2.
La procedura implementata permette quindi, una volta definita la lista degli end-members e il
set opportuno di pesi, di generare il set di spettri rappresentativi (LUT) delle classi di pixel
misti sia nel campo iperspettrale che in quello multispettrale simulato; le stesse combinazioni
lineari generate per gli end-members iperspettrali sono realizzate infatti anche per il set di
end-members multispettrali, generando due look-up-table coerenti fra loro, una iperspettrale e
una multispettrale.
Una volta ricavate le due look-up-table, la procedura realizza la classificazione dell’immagine
iperspettrale analizzata. Per ogni pixel di tale immagine, lo spettro iperspettrale viene
confrontato con gli spettri della relativa look-up-table, trovando fra questi ultimo lo spettro
più vicino dal punto di vista della distanza RMSE. In questo modo viene quindi stimato il mix
di end-members che risulta più affine allo spettro del pixel analizzato. Questa stima viene
ripetuta per ogni pixel, generando una immagine (immagine classificata) che ha le stesse
dimensioni spaziali dell’immagine analizzata ma un numero di bande pari al numero degli
end-members, che riassume i risultati della classificazione. Per ogni pixel di questa immagine
infatti il valore dell’n-esima banda rappresenta la percentuale dell’n-esimo end-members
presente nella combinazione stimata come più probabile.
La stessa opera di classificazione viene effettuata anche nel campo multispettrale,
comparando dato multispettrale simulato e look-up-table multispettrale, e generando una
immagine analoga a quella generata nel campo iperspettrale.
In Fig. 6.69 sono riportate le immagini classificate iperspettrali (a) e multispettrali (b),
insieme con l’immagine ETM originaria (R=4, G=3, B=2) . Le due classificazioni riportate
sono state effettuate ricorrendo a tre soli end-members, costituiti dagli spettri campione di
laboratorio riferiti a “Green leaf”, “Soil” e “Dark Charcoal”, adottando un numero di pesi pari
a 5. Da questa configurazione è risultata una look-up-table composta da 15 combinazioni,
riportate in tab. 6-24
Combinazione # 1 2 3 4 5 6 7 8 9 Green leafs Soil 1.00 0.75 0.50 0.25 0.00 0.75 0.50 0.25 0.00 0.00 0.25 0.50 0.75 1.00 0.00 0.25 0.50 0.75 191
Dark charcoil 0.00 0.00 0.00 0.00 0.00 0.25 0.25 0.25 0.25 10 11 12 13 14 15 0.50 0.25 0.00 0.25 0.00 0.00 0.00 0.25 0.50 0.00 0.25 0.00 0.50 0.50 0.50 0.75 0.75 1.00 Tab. 6.24 Combinazione di pesi per tre end-members e 5 possibili livelli di peso.
L’immagine classificata risultante è stata visualizzata assegnando il canale verde alla
percentuale dello spettro “Green leafs”, quello rosso alla percentuale dello spettro “Soil” e
quello Blu allo spettro “Dark charcoil”.
Ad una prima analisi qualitativa è possibile vedere come la classificazione fatta con il dato
iperspettrale sembri offrire risultati più ragionevoli. Solo tale classificazione infatti assegna la
classe pura di 100% Dark charcoil al centro della zona classificata come bruciata dall’AIB ed
evidentemente tale nella immagine ETM, così come assegna la classe pura 100% green leafs
alla zona in alto a dx, manifestamente vegetata nell’immagine ETM in veri colori. Anche la
presenza di una zona con 75% di Dark charcoil al contorno di quella classificata come 100%
Dark Charcoil fa pensare ad una ragionevole presenza di pixel misti (terreno bruciato, terreno
vegetato non bruciato) sul contorno dell’area bruciata, cosa che non si verifica invece nella
classificazione multispettrale. Anche le aree con colore prevalentemente marrone, cioè con
prevalenza di classificazione come suolo nudo coincidono con il centro di aree che appaiono
proprio come prive di vegetazione nell’immagine ETM+; la ridotta dimensione di tale aree
giustifica la mancata attribuzione di una classe pura al 100% come suolo nudo, in quanto i
pixel considerati possono ragionevolmente essere affetti da “contaminazioni” di aree vegetate
sui bordi. La classificazione iperspettrale appare quindi in prima analisi molto promettente, e
la qualità dei risultati ottenuti ricorrendo a spettri di laboratorio mostra anche una buona
robustezza spaziale del metodo.
La classificazione multispettrale presenta invece un andamento che evidenzia molto meno gli
aspetti ragionevoli precedentemente descritti per la classificazione iperspettrale, e stima una
presenza non nulla di Dark charcoil anche in aree (in alto a dx e basso asinistra) fuori
dall’area incendiata ed apparentemente vegetate. Rimane comunque da spigare la alta
percentuale di Dark charcoil assegnata anche dalla classificazione iperspettrale alla zona in
basso a sn.
192
(a)
(b)
(c)
Fig. 6.86 Stima della Fire severity
a) Effettuata con il dato iperspettrale
b) effettuata con il dato multispettrale
c) Immagine ETM originale (RBG = 5,4,3)
Se la verità a terra fosse presente, la bontà della classificazione riportata da queste due
immagini potrebbe essere valutata direttamente in maniera quantitativa, evidenziando
eventuali discrepanze e vantaggi del dato iperspettrale, anche al variare della sensibilità della
classificazione, intesa nel senso di combinazioni ragionevolmente discriminabili (cioè di
numero di pesi adottabili) senza incorrere in eccessivi errori di classificazioni.
In assenza di verità a terra, come avviene sfortunatamente nel nostro caso, il confronto fra le
classificazioni può essere fatto in prima istanza solo in termini qualitativi, confrontando fra
loro la ragionevolezza degli eventuali pattern evidenziati dal punto di vista della
classificazione. Allo stato delle cose una analisi di questo tipo, al variare del numero degli
end-members e del numero di pesi usati è ancora in corso.
A prescindere da una classificazione di immagini iperspettrali reali, e cioè effettivamente
acquisite, è in programma in futuro anche una valutazione prettamente teorica fatta su una
immagine iperspettrale simulata; tale immagine verrà realizzata generando i pixel con
193
combinazioni diverse e note degli end-members, realizzate però con un numero di pesi
superiore a quello che verrà adottato nella fase successiva di classificazione. Questo
permetterà di analizzare in maniera più quantitativa le prestazioni in termini di sensibilità e
robustezza, e di effettuare quindi un confronto fra le potenzialità riscontrate nel campo
iperspettralerispetto a quelle del campo multispettrale.
194
6.8.8 WP 610 – VALUTAZIONE DELLO STATO DI UMIDITA’
SUPERFICIALE
6.8.8.1 PREMESSA
La stima dell’umidità del suolo, inteso come misura del contenuto d’acqua per unità di
volume, e soprattutto la capacità di monitoraggio periodico, ha da sempre rappresentato una
informazione di primaria importanza per una molteplicità di settori applicativi inerenti il
controllo e lo sfruttamento del territorio (es: agricoltura, pascoli, rischio idrogeologico, rischio
di incendi, ecc.). Nel corso degli anni, una ampia gamma di studi e sperimentazioni hanno
portato alla realizzazione di tecnologie e la messa a punto di metodi semplici ed accurati volti
alla misura dell’umidità del suolo mediante strumentazione e misure al suolo. Tali metodi,
quali la gravimetria o le misure TDR (Time Domain Reflectometry), pur fornendo misure
consistenti, affidabili e ripetibili, presentano notevoli limiti dovuti al tempo ed alla quantità di
lavoro necessario per effettuare periodicamente campagne di misure puntuali su aree estese, o
con coperture con maggiori risoluzioni su zone limitate.
Data la eterogeneità naturale dei suoli, della copertura vegetale e dell’impatto antropico sul
territorio, è in genere necessario potere disporre di informazioni relative allo stato di umidità
dei suoli su aree estese e con periodi di ripetizione anche di pochi giorni. Da ciò nasce
l’interesse della comunità allo studio ed alla messa a punto di metodi di monitoraggio
dell’umidità basati sul telerilevamento aereosatellitare, tecnologia in grado di soddisfare le
necessità di copertura estesa, in tempi brevi ed a costi ridotti, a patto che, mediante adeguati
modelli e metodi di elaborazione, sia possibile mettere in relazione con un sufficiente livello
di affidabilità ed accuratezza la variabile “umidità” con le misure di radianza.
Il settore del telerilevamento a microonde ha ormai fornito risposte abbastanza esaurienti
sulle concrete possibilità di ottenere informazioni sul contenuto di acqua del suolo mediante
l’impiego di sensori SAR operanti a lunghezze d’onda adeguate (L,P), come pure sui limiti
dovuti alla limitata disponibilità di sensori operativi a tali frequenze ed alla onerosità del
processo di elaborazione delle immagini SAR.
Non altrettanto definita appare l’importanza del telerilevamento ottico nelle bande di
riflettanza ed il ruolo che potrebbe svolgere operativamente nel contesto di attività di
controllo e monitoraggio sistematico di un territorio a scala provinciale o regionale.
Nonostante da oltre trent’anni siano state condotte sperimentazioni sia su comprensori
estesi mediante l’impiego di sensori multispettrali a bassa risoluzione spaziale di qualche
chilometro, operativi a bordo di satelliti geostazionari (Meteosat, GOES, ecc) o con orbita
polare (NOAA-N), sia su zone di studio limitate mediante l’impiego di sensori ad alta
risoluzione quale Landsat-TM/ETM+ o ASTER, a tutt’oggi non esiste ancora una
metodologia consolidata per la stima dell’umidità del suolo, basata sull’informazione
ottenibile da immagini di telerilevamento nelle bande ottiche di riflettanza. Mentre i principi
fisico-teorici ed i meccanismi che sono alla base dell’interazione dell’acqua con il suolo e la
vegetazione, che rappresentano le principali componenti dell’ambiente, sono stati ampiamente
studiati e descritti con adeguati modelli, tali relazioni non sembrano essere facilmente
trasferibili al controllo del territorio reale. La complessità tipologica dei suoli e della
vegetazione in generale, come pure l’eterogeneità dei suoli e della vegetazione in funzione
della risoluzione al suolo dei sensori multispettrali operativi, rende molto difficile la
formulazione di un modello euristico-analitico. Gli studi e le sperimentazioni sono quindi
orientati per lo più alla messa a punto di algoritmi e metodi euristo-empirici, la cui efficienza
è verificata fondamentalmente sulla base di osservazioni e comportamenti statistici.
195
Lo sviluppo operativo dei sensori iperspettrali a banda stretta a bordo di piattaforme
aereospaziali, ha ovviamente dato un nuovo impulso alla ricerca relativa ai metodi di stima
dello stato di umidità superficiale mediante l’impiego di bande di riflettanza, in conseguenza
del dettaglio spettrale molto più elevato fornito da tali sensori in confronto ai sensori
multispettrali a banda larga. Come per altri settori applicativi, anche nel caso della stima
dell’umidità, è necessario investigare ed accertare quanto sia significativa la maggiore
informazione iperspettrale ai fini dell’obiettivo specifico ed inoltre come tale informazione
possa essere impiegata in maniera operativa, mediante lo sviluppo di metodi stabili ed
affidabili che possano essere impiegati in attività di controllo e monitoraggio a livello
operativo.
6.8.8.2 OBIETTIVI
In conseguenza di quanto detto nella premessa, l’attività del WP 610 si pone come
obiettivo specifico lo sviluppo di una indagine volta a valutare le potenzialità informative del
dato iperspettrale in confronto alle immagini da sensori di telerilevamento multispettrali a
banda larga, nel contesto dei metodi di stima e di monitoraggio dello stato di umidità
superficiale del suolo SSM (Surface Soil Moisture) basati sull’impiego di misure di
riflettanza. Da un lato, l’attività mira quindi a valutare l’efficienza di metodi o algoritmi
sperimentati e messi a punto con sensori a banda larga in confronto ai risultati ottenibili dalla
loro applicazione a dati iperspettrali a banda stretta; dall’altro, ad individuare le
complementarietà informative del dato a banda stretta rispetto alle immagini a banda larga ai
fini della messa a punto di metodi in grado di integrare le potenzialità dell’una e dell’altra
tipologia di sensori ai fini delle attività operative di controllo e monitoraggio del territorio.
E’ necessario sottolineare che tutti, o quasi tutti i metodi per la stima dell’umidità del suolo
basati su misure di riflettanza da sensori di telerilevamento, mirano a determinare lo stato di
umidità superficiale del suolo (poche decine o centinaia di micron di profondità) in termini di
umidità relativa e non di contenuto volumetrico di acqua. Anche se tale obiettivo, della
misura relativa di umidità, può sembrare riduttivo in realtà la messa a punto di un metodo
“stabile” e cioè in grado di fornire misure relative dello stato di umidità che risultino affidabili
e coerenti nel tempo costituisce un risultato molto importante per operazioni di monitoraggio
in molteplici scenari applicativi.
Di seguito, dopo un breve inquadramento teorico-fisico del problema viene definito
l’approccio metodologico della sperimentazione. Successivamente vengono descritte le varie
fasi operative relative sia alla preelaborazione ed al confronto dell’informazione a banda
stretta rispetto alle immagini multispettrali, sia all’applicazione di determinati algoritmi
multispettrali di stima dell’umidità. I risultati sono quindi messi a confronto, unitamente ai
dati ancillari di pluviometria disponibili.
6.8.8.3 INQUADRAMENTO DELLA PROBLEMATICA - PRINCIPI
FISICI
Fin dal 1925 Angstrom, mediante misure di laboratorio su vari tipi di suolo, arrivò alla
conclusione che la riflettanza del suolo decresce con l’aumentare dell’umidità. Angstrom
attribuì questo fenomeno ad un fenomeno di riflessione interna sul film di acqua che copre le
particelle del suolo, che causa una riflessione di una parte dell’energia verso il suolo stesso e
diminuisce quindi la quantità di energia riflessa verso l’alto. Successivamente, tale
comportamento dei suoli venne confermato nel 1951 da Curcio e Petty, da Bowers e Hanks
196
nel 1965, ed infine da Stoner e Baumgardner (1981), solo per citarne alcuni, che dimostrarono
sperimentalmente che, all’aumentare dell’umidità di un suolo, il suo valore di riflettanza
tende a diminuire lungo l’intero spettro da 400 a 2500 nm.
Planet (1970), affermò come, in base alla conoscenza dello spettro di riflettanza di un suolo
secco e dell’indice di rifrazione del liquido, sia possibile predire la riflettanza del campione in
condizioni di saturazione.
Negli anni successivi, numerose prove sperimentali effettuate in laboratorio su molte
tipologie di suoli puri, confermarono le stesse caratteristiche.
Tra le altre, di particolare significatività sono i risultati della sperimentazione condotta da
Lobell ed Asner (2002), volta ad osservare e stimare le variazioni spettrali di riflettanza dei
suoli al variare del contenuto di acqua.
Quattro differenti tipologie di suolo, adeguatamente settacciati per eliminare qualunque
tipo di impurità ed omogeneizzare le dimensioni dei grani di terra, vennero seccati in forno a
70 °C per due settimane. Dopo avere misurato la risposta di riflettanza dei campioni essicati,
(linea blu di valore maggiore in fig. 1), i suoli furono bagnati con acqua deionizzata fino al
raggiungimento del punto di saturazione (curva nera più bassa di fig. 1). Successivamente
vennero acquisite periodicamente le curve di riflettanza dei suoli, fino al raggiungimento del
punto iniziale di essicamento. In ciascun momento, il contenuto di acqua di ciascun campione
venne determinato dal peso ed espresso in termini di volume di acqua relativo.
Una caratteristica importante da notare nelle curve di fig. 1 riguarda la forma delle curve
spettrali che rimane sostanzialmente simile con il variare dell’umidità. Questo corrisponde
alla sensazione comune dell’uomo, relativa al fatto che un suolo bagnato appare più scuro, ma
sostanzialmente mantiene lo stessa tonalità di colore del suolo asciutto. Di conseguenza, la
misura dell’angolo spettrale nello spazio iperspettrale ad n dimensioni (n=numero di bande),
non varia al variare dello stato di umidità del suolo e risulta quindi una misura
tendenzialmente insensibile al contenuto di acqua del suolo.
Vi sono in realtà alcune variazioni minori dello spettro, in particolare nell’intervallo
spettrale corrispondente al blue-verde. E’ peraltro importante notare la piccola variazione di
ampiezza nell’intervallo del blu, rispetto alla molto più consistente decrescita che si verifica
alle lunghezze d’onda dello SWIR all’aumentare dell’umidità. La diminuzione di riflettanza
risulta accentuata anche in corrispondenza delle bande principali di assorbimento dell’acqua
centrate a 1450 e 1900 nm e si evidenzia, anche se in maniera minore, alle lunghezze d’onda
di 760, 970 e 1190 nm, in corrispondenza delle bande minori di assorbimento.
Fig. 1 – Riflettanza spetttrale del suolo al variare del contenuto di acqua (Lobel and Asner, 2002).
197
In definitiva, lo studio del comportamento spettrale di fig. 1 rappresenta la base per lo
sviluppo e la sperimentazione di molti algoritmi per la stima dello stato di umidità del suolo
basati sull’impiego di immagini multispettrali di telerilevamento.
Peraltro, i suoli naturali sono sistemi complessi contenenti in varie proporzioni minerali,
acqua, aria, materiali organici ed inorganici di vario tipo. In definitiva, i suoli si presentano
generalmente molto eterogenei per quanto riguarda le proprietà fisiche e la composizione
chimica, ed inoltre variabili spazialmente. Inoltre, la superficie del suolo risente delle
condizioni atmosferiche e meteorologiche che determina processi di erosione o di generazione
di croste, cosicché spesso le caratteristiche della superficie differiscono dalle caratteristiche
fisiche e biochimiche sub-superficiali.
Comunque, per una data area, la riflettanza di un suolo è principalmente determinata
dall’umidità, poiché gli altri fattori (composizione minerale, presenza di materiale organico,
tessitura, ecc.) tendono a variare lentamente nel tempo rispetto alle variazioni del contenuto di
acqua del terreno.
Il problema di mettere a punto un sistema di monitoraggio dello stato di umidità del suolo
mediante telerilevamento aereosatellitare, non può comunque prescindere dal fatto che la
maggior parte delle misure di riflettanza da piattaforma aereospaziale su aree naturali, per
quanto effettuate con sensori ad alta risoluzione, comprendono anche il contribuito della
vegetazione, che ha caratteristiche e meccanismi fisici di riflettanza differenti. In definitiva, le
acquisizioni mediante sensori di telerilevamento forniscono misure miste di radianza riflessa
dal terreno, comprendente sia vegetazione che suolo.
La misura di riflettanza di una copertura vegetale è in generale influenzata dal contributo
di energia riflessa dal suolo, specialmente dove la densità della vegetazione o lo stato
fenologico limita la copertura. A sua volta, le caratteristiche di riflettanza del suolo sono
influenzate dalla presenza di vegetazione, anche se sparsa e di limitata consistenza spaziale.
Molti studi condotti in laboratorio su piante differenti, hanno accertato una generale
tendenza all’aumento della riflettanza al diminuire del contenuto di acqua fogliare. Il
comportamento della vegetazione al variare del
contenuto d’acqua è raffigurato
schematicamente in fig. 2. Al diminuire della presenza di acqua nella pianta, tende ad
aumentare l’energia riflessa nelle bande del rosso (600-700 nm) e dello SWIR (1550-1750
nm, 2125-2250 nm). Mentre l’intervallo spettrale del vicino infrarosso (NIR) presenta un
andamento variabile, la banda spettrale del blu (400-500 nm), mostra una variazione
insignificante alla variazione di acqua della pianta.
La banda NIR è particolarmente sensibile sia alle caratteristiche che allo stato della
vegetazione, mentre le bande SWIR a 1300nm, 1500 nm e 2200 nm sembrano avere una forte
relazione con la variazione di contenuto di acqua della pianta.
La banda del blue è, invece, la meno sensibile al contenuto di acqua e risulta quindi adatta
ad essere utilizzata per evidenziare le variazioni di umidità della pianta ed ad essere
insensibile alla struttura ed allo stato della foglia.
198
Fig. 2 – Esempi di laboratorio di misure di riflettanza in funzione del contenuto di acqua della
vegetazione (Elvidge, 1990)
Confrontando quindi la risposta spettrale del suolo con quella della vegetazione, si
evidenzia un comportamento comune di aumento della riflettanza al diminuire del contenuto
di acqua, specialmente alle lunghezze d’onda dello SWIR. La fig. 3 mostra una
schematizzazione del comportamento della riflettanza in funzione dell’umidità sia per quanto
riguarda il suolo nudo, che per la vegetazione, suddiviso in sei aree spettrali corrispondenti
alle bande VNIR-SWIR del sensore TM/ETM+ o MODIS, due dei pochi sensori
effettivamente operativi ed accessibili sistematicamente per un impiego di monitoraggio,
anche se con dettaglio spaziale molto differente (30m per il TM e 250/500 m per il MODIS).
Fig. 3 – spettri di riflettanza simulati corrispondenti alle bande spettrali del sensore TM/ETM+
in funzione dell’umidità del suolo (a sinistra); comportamento della copertura vegetale (a destra)per
un determinato valore di indice di area fogliare (LAI), di umidità del suolo e di contenuto di clorofilla
Cab (Wang and Qu, 2007).
E’ evidente come sia per il suolo nudo che per la copertura vegetale, un aumento
dell’umidità e del contenuto di acqua, determini un corrispondente decrescita della riflettanza,
principalmente nelle bande SWIR B6 (1640 nm) e B7 (2125 nm), anche se con sensibilità
differente per i due casi. Infatti, mentre la derivata tra la banda B6 e la banda B7 aumenta con
l’aumentare dello stato di umidità e quindi al descrescere del valore di riflettanza, nel caso
della copertura vegetale la pendenza tra B6 e B7 tende a diminuire con il contenuto di acqua
della vegetazione. Questa caratteristica rappresenta un aspetto importante per lo sviluppo di
metodi volti contemporaneamente alla stima dell’umidità sia del suolo che della vegetazione.
199
6.8.8.4 METODI PER LA STIMA
TELERILEVAMENTO OTTICO
DELLA
SSM
MEDIANTE
A tutt’oggi, mentre molte sperimentazioni condotte separatamente su suoli nudi o sulla
vegetazione hanno portato alla formulazione di algoritmi volti alla stima dello stato di umidità
mediante misure di riflettanza da telerilevamento, ancora pochi metodi risultano proposti in
letteratura per la stima contemporaneamente sia dell’umidità del suolo che del contenuto di
acqua della vegetazione.
I differenti approcci metodologici di analisi possono essere suddivisi
approssimativamente nelle seguenti categorie:
o analisi basate su singola banda;
o metodi a doppia banda multispettrale o differenziale spettrale di bande non
adiacenti spettralmente;
o metodi basati sulla derivata spettrale o differenziale di bande adiacenti;
o metodi basati sui differenziali di bande di assorbimento
Il primo approccio metodologico di stima dell’umidità da misure di riflettanza è basato
sull’analisi della riflettanza di una singola banda spettrale, normalizzata rispetto allo spettro di
riflettanza dello stesso suolo in condizioni asciutte.
I risultati ottenuti da prove sperimentali di laboratorio (Weidong et al, 2003), hanno
dimostrato che la migliore correlazione tra umidità e riflettanza si verifica in una delle bande
maggiori di assorbimento, attorno ai 1944 nm. Ovviamente tale lunghezza d’onda non può
essere impiegata per misure da satellite in quanto il segnale verrebbe quasi completamente
assorbito dall’atmosfera. Di conseguenza, l’approccio basato sulla riflettanza relativa non può
essere impiegato in quelle regioni spettrali dove mostra la migliore efficienza.
E’ inoltre da considerare il fatto che la stima della riflettanza relativa, presuppone che per
ogni tipo di suolo naturale, sia disponibile il relativo spettro di riferimento in condizioni
asciutte. L’eterogeneità dei suoli dell’ambiente naturale rilevate da aereo o da satellite, rende
praticamente impossibile il potere disporre concretamente di tale riferimento, in particolar
modo in presenza di terreni altamente varabili spazialmente.
Comunque, mentre in base alle caratteristiche di risposta del suolo nudo è possibile
ipotizzare una sperimentazione volta ad accertare il livello di sensibilità di algoritmi basati su
una singola banda spettrale, non altrettanto è pensabile per la copertura vegetale a causa della
maggiore variabilità nel tempo dovuta all’evoluzione fenologica ed alla maggiore complessità
di variazione dello stato delle piante.
La maggior parte dei metodi di stima dell’umidità sono quindi basati sull’impiego di indici
multispettrali che utilizzano due o più bande spettrali che mettono in relazione bande che
hanno una sensibilità maggiore al contenuto di acqua, con altre bande spettrali che risultano
praticamente invarianti relativamente al parametro umidità.
La maggior parte sono implementati mediante gradienti o differenze normalizzate. Anche
in questo caso, le misure in laboratorio a lunghezze d’onda nella vicinanza (sui fronti) delle
bande di assorbimento si sono dimostrate appropriate per la valutazione dello stato di umidità
del suolo.
Un approccio proposto da Weidong (2003), mette in relazione l’umidità con la derivata
calcolata come differenza della riflettanza tra due bande spettrali consecutive situate in
prossimità delle bande di assorbimento a 1944 nm.
Come generalizzazione del metodo della derivata, la differenza, il rapporto o la differenza
normalizzata tra due bande spettrali situate in differenti porzioni dello spettro di riflettanza,
sono stati ampiamente sperimentati e valutati mediante correlazioni e regressioni con le
200
misure di umidità. Tale approccio è risultato di gran lunga più fruibile mediante misure di
telerilevamento, in quanto le misure bande di riflettanza che vengono messe in relazione non
si trovano negli intervalli spettrali di assorbimento e quindi risentono molto meno
dell’influsso atmosferico.
Il vantaggio fondamentale dell’approccio multi-banda, in confronto al metodo a singola
banda, consiste inoltre nella stabilità relativa che si manifesta tra suoli di tipo diverso, ma a
tutt’oggi ancora sussistono molti problemi ed incertezze relativamente alla robustezza dei
metodi sperimentati, se utilizzati in zone con suoli misti con caratteristiche differenti.
Sussistono ancora molti dubbi sulla reale funzionalità dei metodi sviluppati e validati in
prove di laboratorio, se utilizzati in campo, su un ambiente naturale eterogeneo, ed ancora di
più se applicati a misure effettuate da sensori di telerilevamento che hanno caratteristiche di
risoluzione spaziale da un metro a decine o centinaia di metri, tali quindi da “integrare”
ulteriormente su aree estese l’informazione naturale di riflettanza locale.
In definitiva, quali metodi per la stima dell’umidità basati su misure di riflettanza e
sperimentati in laboratorio, siano più “robusti” relativamente alla loro stabilità ed efficienza
quando siano applicati all’ambiente naturale eterogeneo rilevato da sensori di telerilevamento,
rimane una questione ancora aperta.
6.8.8.5 METODOLOGIA
Il conseguimento dell’obiettivo relativo alla valutazione delle potenzialità del dato
iperspettrale di telerilevamento ottico ai fini della stima dell’umidità superficiale, da una parte
richiede la valutazione dell’efficienza dei metodi multispettrali disponibili quando siano
applicati in un contesto ambientale naturale, in termini di affidabilità della stima ed inoltre di
stabilità nelle operazioni periodiche di monitoraggio di uno stesso territorio.
Data la naturale eterogeneità del territorio, è necessario considerare separatamente il
comportamento della copertura vegetale e del suolo nudo, relativamente alla variazione della
presenza di acqua, in modo da potere accertare l’efficacia delle misure da satellite,
diminuendo il numero delle variabili di incertezza. Dall’altra parte è necessario valutare
l’informazione che deriva dal maggior dettaglio spettrale dei sensori a banda stretta nel
contesto dei metodi di stima dell’umidità, anche mediante il confronto delle prestazioni
ottenute dall’impiego di sensori multispettrali a banda larga, con quelle da sensori iperspettrali
a banda stretta, e l’eventuale definizione di nuovi metodi innovativi basati sull’impiego del
dato iperspettrale o l’integrazione con il multispettrale.
In definitiva, lo studio è stato basato su una analisi multisensore tra sensori a banda stretta
e multispettrali a banda larga; multispettrale, per la verifica delle bande e/o combinazioni di
bande maggiormente riferibili allo stato di umidità, e multitemporale con lo scopo di
verificare il più possibile la stabilità nel tempo dei risultati accertati ad una certa data.
Le immagini ETM+, precedentemente convertite da digital count a misure di radianza,
unitamente alle immagini ALI ed Hyperion già disponibili in valori di radianza, sono state
convertite in riflettanza apparente o albedo, correggendo le distorsioni dovute alla differente
geometria del sole alle differenti date di acquisizione.
Non sono stati applicati metodi di correzione atmosferica, in quanto le immagini sono
risultate sufficientemente congruenti e, inoltre, i metodi di compensazione degli effetti
atmosferici tendono, in genere, ad introdurre distorsioni non piccole in prossimità delle bande
di assorbimento maggiori, ma anche di quelle minori, introducendo un effetto di rumore e di
alterazione nella continuità spettrale.
201
Successivamente, si è ritenuto utile confrontare, mediante metodi statistici, l’informazione
delle bande Hyperion relative al centro banda (Cwl) delle corrispondenti bande ETM ed ALI
in modo da verificarne la correlazione, come pure la variabilità delle stesse nel tempo.
Purtroppo, data la scarsa disponibilità di immagini Hyperion, questo si è potuto valutare solo
per la coppia di immagini del 12 lugli e del 14 settembre.
Per potere valutare la coerenza degli algoritmi multispettrali per la stima dello stato di
umidità relativamente alle precipitazioni, e la congruenza relativa tra loro, le immagini sia
Hyperion che multispettrali ETM+, unico sensore di cui è disponibile la sequenza
multitemporale completa, sono state suddivise in due sottoinsiemi di punti relativi alla
copertura vegetale ed alle aree di suolo nudo.
In base all’indice NDVI, sono stati selezionati solo i punti che in tutte le immagini della
sequenza risultano costantemente suolo nudo o vegetazione, mediante intersezione di tutte le
date disponibili del sensore ETM con i valori di NDVI predefiniti per il suolo e la copertura
vegetale. Tutti i punti che presentavano anche una sola variazione da suolo nudo a vegetato o
parzialmente vegetato e viceversa, sono stati scartati. Tutte le successive sperimentazioni ed
analisi sono state quindi condotte su due popolazioni distinte, relative a suoli nudi, oppure
coperti completamente dalla vegetazione.
In base all’analisi dei principi fisici e delle sperimentazioni riportate in letteratura e tra i
numerosi algoritmi proposti, si è scelto di basare l’analisi sul confronto e la valutazione
dell’efficienza di un insieme ristretto di metodi che si diversifichino tra loro sia per i criteri
teorici su cui sono stati sviluppati che, soprattutto per la significatività degli intervalli spettrali
impiegati ed inoltre per l’esaustività della sperimentazione effettuata per dimostrarne la
validità.
In tab. I sono riportati i metodi selezionati, che rappresentano un insieme significativo di
metodi, ma non pretendono ovviamente di essere rappresentativo di tutte le tecniche e
metodologie sviluppate.
Stima del contenuto di acqua della vegetazione
NDII=(
Normalized Difference Infrared Index (Hardinsky,
1983)
860- 1600)/( 860+ 1600)
NDWI=(
860- 1240)/( 860+ 1240)
Normalized Difference Water Index (Gao, 1996)
NDWI=(
860- 1640)/( 860+ 1640)
Normalized Difference Water Index (Chen, 2005)
Umidità superficiale del suolo
VSDI=1-[(
NMDI=[(
NSMI=(
SWIR- blue)/( red- blue)]
Visible and SWIR Drought Index (Zhang, 2013)
860-( 1640- 2130)]/[( 860+( 1640- 2130)]
1800- 2119)/( 180+ 2119)
MTVI – Multitemporal Ts-VI index
Normalized Multispectral Drought Index (Wang)
Normalized difference Soil Moisture Index
(Haubrock, 2008)
(Carlà et al. 2009)
Tab. I – Algoritmi per la stima dell’umidità mediante misure di riflettanza
6.8.8.6 DATI DISPONIBILI
Una attività di studio e sperimentazione volta a valutare le potenzialità dell’informazione
iperspettrale di telerilevamento in confronto ai sensori multispettrali a banda larga, ai fini
della valutazione e del monitoraggio dello stato di umidità superficiale del territorio, non può
ovviamente prescindere dalla disponibilità di immagini e dati ancillari adeguati per una analisi
completa dei vari aspetti del problema. A tale scopo, l’insieme di dati acquisiti
202
precedentemente è stato ulteriormente esteso includendo altre acquisizioni di immagini ETM+
della stessa area di studio nella zona di Capalbio, durante la stessa stagione estiva del 2002.
Questo, unitamente all’acquisizione dei dati di pluviometria corrispondenti, ha permesso di
estendere il periodo di studio per tutto il periodo estivo del 2002 da fine giugno a fine
settembre, in accordo alle date riportate nella tab. II. In realtà, la prima immagine del 26
giugno 2002 è stata esclusa dalla sequenza in quanto parzialmente coperta da nuvole.
DATA
26 giugno 2002
12 luglio 2002
13 agosto 2002
14 settembre 2002
30 settembre 2002
SENSORI
ETM+
ETM+
ETM+
ETM+
ETM+
HYPERION
ALI
HYPERION
ALI
Tab. II – Dati multispettrali ed iperspettrali disponibili per la sperimentazione
La sequenza multitemporale dell’area di studio nella zona di Capalbio è mostrata nella fig.
4. Dalla prima a sinistra, acquisita il 12 luglio all’ultima a destra, rilevata il 30 settembre 2002
appare chiara l’evoluzione del ciclo fenologico della vegetazione, come pure l’invarianza
delle aree boscate. Parte della zona centrale delle immagini, corrispondente ad un’area
prettamente agricola, si presta molte bene per lo studio dell’umidità del suolo, in quanto una
buona parte di essa permane denudata completamente in tutte e quattro le acquisizioni.
Fig. 4- Sequenza multitemporale ETM dell’area di studio nella zona di Capalbio. In sequenza da sinistra a
destra: 12/07, 13/08, 14/09 e 30/09 200. (RGB=543)
La fig. 5 mostra invece la posizione delle quattro stazione di misura pluviometrica
dislocazione attorno alla area di studio.
203
Fig. 5 – Dislocazione delle stazioni di misura pluviometriche
L’andamento pluviometrico giornaliero delle precipitazioni durante il periodo è riportato in
fig. 6. Le sbarre in rosso indicano quattro delle cinque date di acquisizione dei dati satellitari,
mentre le aree colorate in marrone mostrano la pioggia cumulata nei giorni antecedenti a
ciascun passaggio. La stessa informazione è mostrata dal grafico di fig. 7
90
80
70
60
50
40
30
20
0
01‐lug
03‐lug
05‐lug
07‐lug
09‐lug
11‐lug
13‐lug
15‐lug
17‐lug
19‐lug
21‐lug
23‐lug
25‐lug
27‐lug
29‐lug
31‐lug
02‐ago
04‐ago
06‐ago
08‐ago
10‐ago
12‐ago
14‐ago
16‐ago
18‐ago
20‐ago
22‐ago
24‐ago
26‐ago
28‐ago
30‐ago
01‐set
03‐set
05‐set
07‐set
09‐set
11‐set
13‐set
15‐set
17‐set
19‐set
21‐set
23‐set
25‐set
27‐set
29‐set
10
Fig. 6 Precipitazione media giornaliera nella nella zona dell’area di studio, misurata dalle
stazione meteorologiche di Scansano, Pomonte, Roccalbegna e Ponte Tura nel periodo dal 1
luglio al 30 settembre 2002. Le barre in rosso indicano le date di acquisizione del/i satellite/i.
204
Precipitazione cumulata
50 60
40
10
20 30
12 lug
14‐set
30‐set
13‐ago
0
Precipitazione cumulata (mm)
(stazioni di Scansano, Pomonte, Roccalbena e Ponte Tura)
1
2
3
4
5
6
7
8
9
Giorni antecedenti il passaggio del satellite
10
Fig. 7 - Precipitazione cumulata relativa all’area di studio nei giorni antecedenti le
acquisizioni satellitari del 12 luglio, 13 agosto, 14 settembre e 30 settembre 2002.
Dai grafici si evidenzia un periodo di mancanza di precipitazione nei giorni antecedenti il
passaggio del satellite Landsat ETM+ il 12 luglio. Segue un periodo di precipitazione anche
piuttosto intensa tra i primi di agosto ed il 13 agosto, data di acquisizione di una nuova
immagine ETM+. Purtroppo in questa data non sono disponibili immagini né iperspettrali né
del sensore ALI.
Le due ultime acquisizioni il 14 ed il 30 settembre sono precedute da precipitazioni nei
giorni antecedenti il passaggio dei satelliti, in particolare tra 7 e 8 giorni prima dei passaggi.
L’asse delle ascisse di fig. 7 indica in ordine crescente il numero dei giorni antecedenti
ciascuna acqusizione, e quindi la variabile tempo che scorre all’indietro. La stessa chiave di
lettura deve essere applicata al grafico di fig. 6, in cui le barre di colore marrone indicano la
quantità di pioggia cumulata nei giorni precedenti le acquisizioni con andamento crescente in
direzione contraria all’asse temporale del grafico.
Ovviamente, le curve cumulative di precipitazione non forniscono in nessun modo una
indicazione dello stato di umidità superficiale del suolo, né tantomeno del terreno sottostante,
ma costituiscono solo un’indicazione diretta di acqua disponibile, e quindi indiretta di umidità
“potenziale” che tende ovviamente a ridursi con l’allungarsi del periodo di tempo a causa dei
processi naturali di evapotraspirazione del suolo e della vegetazione.
6.8.8.7 CONVERSIONE
IN
VALIDAZIONE
MULTITEMPORALE
MISURE
DI
COERENZA
RIFLETTANZA
E
ATMOSFERICA
Per potere confrontare immagini acquisite in date e situazioni ambientali differenti da
sensori diversi, è necessario passare da una misura di energia radiante (in genere in
W/(m2·λ·st)) ad un valore di riflettanza del punto mediante una normalizzazione relativamente
all’irradianza solare in modo da ottenere un valore di “riflettanza planetaria” o “albedo”, o
anche “riflettanza apparente” in quanto la
conversione non considera gli effetti
dell’atmosfera.
A tale scopo le immagini sono state normalizzate applicando la trasformazione seguente:
π · Lλ · d2 / (Esunλ · cos θs)
dove:
205
= riflettanza apparente unitaria
Lλ = radianza spettrale misurata al sensore (Top Of Atmosphere radiance)
d = distanza Terra-Sole in unità astronomiche derivata dalla formula:
1.0 - 0.01674 · cos [ 0.01720 · (d - 4.0 )]
oppure estratte dal nautical handbook
θs = angolo di elevazione solare al momento del rilevamento (gradi)
Esunλ = irradianza solare exoatmosferica in banda
I grafici di fig. 8 rappresentano rispettivamente gli spettri medi di radianza delle due
immagini iperspettrali Hyperion, e le corrispondente curve di riflettanza apparente ottenute
dopo la normalizzazione.
Nel caso di scene acquisite in condizioni di atmosfera limpida, la normalizzazione è
sufficiente ad eliminare la variabilità radiometrica tra scene differenti causata dalla geometria
del sole al momento della acquisizione. Nel caso che una o ambedue le scene da confrontare
siano acquisite in condizioni atmosferiche poco trasparenti e sostanzialmente differenti, le
immagini riflettanza che ne deriva non sono congruenti relativamente alle condizioni di
rilevamento e quindi le valutazioni del confronto sono affette da errore.
Per verificare la congruenza atmosferica delle due immagini Hyperion del 12 luglio e del
14 settembre 2002, è stato adottato un metodo basato sulla individuazione di un punto,
definito PIF (Pseudo-Invariant Feature) che presenta caratteristiche spettrali il più possibile
invarianti nel tempo ed inoltre una caratteristiche di riflettanza spettrale il più possibile
costante (corpo grigio).
Il confronto della risposta spettrale di tali punti in date differenti permette di verificare la
congruenza della loro risposta, e quindi la similarità o meno delle condizioni atmosferiche.
Un punto PIF è stato individuato nell’area del paese di Scansano (fig. 9), in corrispondenza
di un ampio parcheggio asfaltato e di un grande capannone, che sembra avere caratteristiche
spettrali sufficientemente costante da essere considerato un corpo “semi-grigio”.
206
Fig. 9 – Psudo Invariant Feature (PIF) individuato nella zona di Scansano. Le figure in
alto mostrano la porzione corrispondente di immagine ETM+ del 12/07/2002 in
combinazione 321 (vero colore) a sinistra e 543 a destra. La figura in basso mostra una
immagine estratta da Google Earth, rilevata dal satellite QuickBird il 15/08/2003.
Il grafico dello spettro di radianza del 12 luglio messo a confronto con quello del 14
settembre e la loro differenza sono raffigurati rispettivamente in fig. 10a e 10b. Nonostante la
similarità generale della forma, il differenziale risulta significativamente maggiore
nell’intervallo spettrale del VIS-NIR, con un valore di RMSE totale calcolato su tutto lo
spettro di radianza, pari a 11,3214 W/m2·µm-1·st-1 ed un RMSE percentuale pari a RMSEP=
118,0386 %.
Dopo la conversione in riflettanza apparente la forma dei due spettri e la loro differenza
presenta un accordo molto migliore (figg. 10c e 10d), con un errore rispettivamente inferiore
al 5% di riflettanza nel range 0.0-1.0 (fig. 10d), ed uno scarto quadratico medio totale
calcolato su tutto lo spettro di riflettanza delle due date di RMSE = 0,0816 W/m2·µm-1·st-1.
207
12/07/2002
14/09/2002
175 ‐ 2183,63
181 ‐ 2244,22
187 ‐ 2304,71
193 ‐ 2365,20
145 ‐ 1880,98
151 ‐ 1941,57
157 ‐ 2002,06
163 ‐ 2062,55
169 ‐ 2123,14
115 ‐ 1578,32
121 ‐ 1638,81
127 ‐ 1699,10
133 ‐ 1759,89
139 ‐ 1820,48
85 ‐ 1275,66
91 ‐ 1336,15
97 ‐ 1396,74
103 ‐ 1457,23
109 ‐ 1517,83
55 ‐ 972,99
61 ‐ 1033,49
67 ‐ 1094,09
73 ‐ 1154,58
79 ‐ 1215,17
31 ‐ 732,07
37 ‐ 793,13
43 ‐ 854,18
49 ‐ 915,23
130
120
110
100
90
80
70
60
50
40
30
20
10
0
01 ‐ 426,82
07 ‐ 487,87
13 ‐ 548,92
19 ‐ 609,97
25 ‐ 671,02
radianza (W/m2∙µm‐1∙st‐1)
PIF spectral radiance
Axis Title
Fig. 10a
Differenza radianza PIF (12/07 ‐ 14/09 2002)
Radianza (W/m2∙µm‐1∙st‐1)
35
30
25
20
15
10
5
0
01 ‐ 426,82
06 ‐ 477,69
11 ‐ 528,57
16 ‐ 579,45
21 ‐ 630,32
26 ‐ 681,20
31 ‐ 732,07
36 ‐ 782,95
41 ‐ 833,83
46 ‐ 884,70
51 ‐ 932,64
56 ‐ 983,08
61 ‐ 1033,49
66 ‐ 1083,99
71 ‐ 1134,38
76 ‐ 1184,87
81 ‐ 1235,27
86 ‐ 1285,76
91 ‐ 1336,15
96 ‐ 1386,65
101 ‐ 1437,04
106 ‐ 1487,53
111 ‐ 1537,92
116 ‐ 1588,42
121 ‐ 1638,81
126 ‐ 1689,30
131 ‐ 1739,70
136 ‐ 1790,19
141 ‐ 1840,58
146 ‐ 1891,07
151 ‐ 1941,57
156 ‐ 1991,96
161 ‐ 2042,45
166 ‐ 2092,84
171 ‐ 2143,34
176 ‐ 2193,73
181 ‐ 2244,22
186 ‐ 2294,61
191 ‐ 2345,11
196 ‐ 2395,50
‐5
Banda spettrale
Fig. 10b
L’andamento quasi costante degli spettri di riflettanza in corrispondenza degli intervalli
spettrali di trasparenza atmosferica, evidenzia un comportamento del punto selezionato molto
simile ad un “corpo grigio”. Inoltre, l’evidente similarità dei valori di riflettanza in
corrispondenza della bande minori di assorbimento astmosferico di H2O a 762nm, 942 nm e
1124 nm, e di CO2 a 2002nm e 2052 nm, ed il basso valore di RMSE tra gli spettri delle due
date, indica con buona approssimazione che le due acquisizioni sono avvenute in condizioni
atmosferiche molto simili e quindi non è necessario applicare procedure di elaborazione volte
alla correzione degli effetti atmosferici. In genere, infatti, il risultato della correzione
atmosferica è fortemente dipendente dal modello utilizzato, e la maggior parte dei modelli
tende ad introdurre distorsioni di sovra/sotto-compensazione in corrispondenza dei fronti di
salita e di discesa delle bande di assorbimento che possono essere fonte di problemi nelle fasi
di elaborazione del dato.
208
PIF ‐ Permanent Invariant Feature 12/07/2002
14/07/2002
0.40
riflettanza
0.30
0.20
0.10
01 ‐ 426,82
05 ‐ 467,52
09 ‐ 508,22
13 ‐ 548,92
17 ‐ 589,62
21 ‐ 630,32
25 ‐ 671,02
29 ‐ 711,72
33 ‐ 752,43
37 ‐ 793,13
41 ‐ 833,83
45 ‐ 874,53
49 ‐ 915,23
53 ‐ 952,82
57 ‐ 993,17
61 ‐ 1033,49
65 ‐ 1073,89
69 ‐ 1114,19
73 ‐ 1154,58
77 ‐ 1194,97
81 ‐ 1235,27
85 ‐ 1275,66
89 ‐ 1316,05
93 ‐ 1356,35
97 ‐ 1396,74
101 ‐ 1437,04
105 ‐ 1477,43
109 ‐ 1517,83
113 ‐ 1558,12
117 ‐ 1598,51
121 ‐ 1638,81
125 ‐ 1679,20
129 ‐ 1719,60
133 ‐ 1759,89
137 ‐ 1800,29
141 ‐ 1840,58
145 ‐ 1880,98
149 ‐ 1921,37
153 ‐ 1961,66
157 ‐ 2002,06
161 ‐ 2042,45
165 ‐ 2082,75
169 ‐ 2123,14
173 ‐ 2163,43
177 ‐ 2203,83
181 ‐ 2244,22
185 ‐ 2284,52
189 ‐ 2324,91
193 ‐ 2365,20
0.00
Banda spettrale
Fig. 10c
Differenza riflettanza PIF ( 12/07/2002 e 14/09/2002)
Differenza riflettanza
0.050
0.040
0.030
0.020
0.010
0.000
‐0.010
‐0.020
01 ‐ 426,82
07 ‐ 487,87
13 ‐ 548,92
19 ‐ 609,97
25 ‐ 671,02
31 ‐ 732,07
37 ‐ 793,13
43 ‐ 854,18
49 ‐ 915,23
55 ‐ 972,99
61 ‐ 1033,49
67 ‐ 1094,09
73 ‐ 1154,58
79 ‐ 1215,17
85 ‐ 1275,66
91 ‐ 1336,15
97 ‐ 1396,74
103 ‐ 1457,23
109 ‐ 1517,83
115 ‐ 1578,32
121 ‐ 1638,81
127 ‐ 1699,10
133 ‐ 1759,89
139 ‐ 1820,48
145 ‐ 1880,98
151 ‐ 1941,57
157 ‐ 2002,06
163 ‐ 2062,55
169 ‐ 2123,14
175 ‐ 2183,63
181 ‐ 2244,22
187 ‐ 2304,71
193 ‐ 2365,20
‐0.030
Banda spettrale
Fig. 10d
Una ulteriore prova della congruenza atmosferica tra le due acquisizioni, è data dall’analisi
di un punto selezionato in area boscata, corrispondente ad un’area completamente coperta
dalla stessa tipologia di vegetazione in ambedue le acquisizioni. Il grafico di fig. 11 evidenzia
la quasi completa uguaglianza dei due spettri di riflettanza, tipici della vegetazione, tranne che
nell’intervallo spettrale del vicino infrarosso tra 700nm e 1300 nm circa, che è
particolarmente sensibile alla risposta spettrale della clorofilla e della struttura delle piante e
quindi è da mettersi in relazione ad una variazione stagionale dello stato vegetativo.
Anche in questo caso, la congruenza spettrale delle risposte spettrali alle lungheze d’onda
del visibile (400-700 nm) e dei valori in corrispondenza dei picchi di assorbimento, porta a
confermare la similarità delle condizioni atmosferiche al momento delle acquisizioni.
209
14/09/2002 ‐ vegetato
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0.000
426.82
498.04
569.27
640.50
711.72
782.95
854.18
925.41
993.17
1063.79
1134.38
1205.07
1275.66
1346.25
1416.94
1487.53
1558.12
1628.81
1699.40
1769.99
1840.58
1911.27
1981.86
2052.45
2123.14
2193.73
2264.32
2335.01
riflettanza apparente
12/07/2002 ‐ vegetato
wavelenght
Fig. 11 – spettri di riflettanza delle immagini Hyperion del 12 luglio e del 14 settembre,
relativi ad un punto coperto da vegetazione folta.
6.8.8.8 Correlazione
iperspettrale
della
informazione
multispettrale
e
Il confronto dell’informazione di un sensore multispettrale a banda larga, quale ETM+ o
ALI, con un sensore iperspettrale a banda stretta, al fine di determinare la similarità e
soprattutto la complementarietà delle immagini iperspettrali e le maggiori potenzialità
relativamente a determinati fenomeni e processi naturali di interesse, non può prescindere da
una prima analisi statistica relativa al grado di correlazione tra dati corrispondenti dei due tipi
di sensore.
Al fine di verificare la similarità dell’informazione delle bande di Hyperion rispetto a quelle
di ETM/ALI, è stato calcolato l’indice di correlazione di Pearson mediante la formula:
xy
= σxy
/
σx · σy
dove σxy è la covarianza tra le due variabili statistiche x ed y, e σx e σx sono le due deviazioni
standard.
In statistica, l'indice di correlazione di Pearson, anche detto “coefficiente di correlazione di
Pearson” tra due variabili statistiche è un indice che esprime una eventuale relazione
di linearità http://it.wikipedia.org/wiki/Linearit%C3%A0tra di esse. A tale scopo, ciascuna
delle nove bande CWLj (Central WaveLenght), (j=1,9) di Hyperion corrispondenti alla
lunghezza d’onda centrale delle bande multispettrali di ALI, sono state correlate con le 196
bande dell’immagine iperspettrale di Hyperion (Hi, i=1,196), in modo da verificare la
correlazione o “similarità” informativa di ciascuna banda stretta CWLj di Hyperion, con tutta
la rimanente informazione iperspettrale(fig. 12a).
La stessa operazione è stata effettuata utilizzando direttamente le bande di riflettanza di
ALI (Aj, j=1,9) e correlando ciascuna immagine a banda larga Aj, con le 196 immagini a
banda stretta Hi, di Hyperion (fig.12b).
Tale operazione è stata infine ripetuta sulle immagini ALI ed Hyperion della seconda
acquisizione del 14 settembre 2002, in modo da potere confrontare la correlazione anche nel
dominio del tempo (Fig. 13a e 13b).
Sui grafici sono anche stati visualizzati anche gli intervalli spettrali corrispondenti sia alle
bande ALI (marrone), sia le bande di assorbimento atmosferico (giallo), in modo da potere
confrontare la similarità statistica delle due informazioni sia negli intervalli spettrali di
trasparenza normalmente utilizzati per il telerilevamento ambientale, che in quelli “limitati”
dalle componenti atmosferiche, soprattutto del vapor acqueo.
210
Bande ALI
0.85
Absorption
bands
Ali 1 ‐ Hyp 3
0.65
Ali 2 ‐ Hyp 7
0.45
Ali 3 ‐ Hyp 15
Ali 4 ‐ Hyp 24
0.25
Ali 5 ‐ Hyp 37
0.05
Ali 6 ‐ Hyp 44
‐0.15
01 ‐ 426,82
08 ‐ 498,04
15 ‐ 569,27
22 ‐ 640,50
29 ‐ 711,72
36 ‐ 782,95
43 ‐ 854,18
50 ‐ 925,41
57 ‐ 993,17
64 ‐ 1063,79
71 ‐ 1134,38
78 ‐ 1205,07
85 ‐ 1275,66
92 ‐ 1346,25
99 ‐ 1416,94
106 ‐ 1487,53
113 ‐ 1558,12
120 ‐ 1628,81
127 ‐ 1699,10
134 ‐ 1769,99
141 ‐ 1840,58
148 ‐ 1911,27
155 ‐ 1981,86
162 ‐ 2052,45
169 ‐ 2123,14
176 ‐ 2193,73
183 ‐ 2264,32
190 ‐ 2335,01
Indice di correlazione di Pearson
Correlazione Cwl ALI ‐ Hyperion (12/07/2002)
Ali 7 ‐ Hyp 82
Ali 8 ‐ Hyp 121
Ali 9 ‐ Hyp 179
banda spettrale
Fig. 12a – Indice di correlazione di Pearson tra bande Hyperion corrispondenti ai centro
banda CWL delle bande multispettrali di ALI, e tutte le bande dell’immagine iperspettrale
Hyperion del 12/07/2002
Correlazione bande ALI ‐ Hyperion (12/07/2002)
Bande
assorbimento
Bande ALI
0.8
ALI‐B1
0.6
ALI‐B2
ALI‐B3
0.4
ALI‐B4
0.2
ALI‐B5
0
‐0.2
ALI‐B6
01 ‐ 426,82
08 ‐ 498,04
15 ‐ 569,27
22 ‐ 640,50
29 ‐ 711,72
36 ‐ 782,95
43 ‐ 854,18
50 ‐ 925,41
57 ‐ 993,17
64 ‐ 1063,79
71 ‐ 1134,38
78 ‐ 1205,07
85 ‐ 1275,66
92 ‐ 1346,25
99 ‐ 1416,94
106 ‐ 1487,53
113 ‐ 1558,12
120 ‐ 1628,81
127 ‐ 1699,10
134 ‐ 1769,99
141 ‐ 1840,58
148 ‐ 1911,27
155 ‐ 1981,86
162 ‐ 2052,45
169 ‐ 2123,14
176 ‐ 2193,73
183 ‐ 2264,32
190 ‐ 2335,01
Indice di correlazione di Pearson
1
ALI‐B7
ALI‐B8
ALI‐B9
Banda spettrale
Fig. 12b – Indice di correlazione di Pearson tra le bande dell’immagine multispettrale di ALI
del 12/07/2002 e le 196 bande dell’immagine Hyperion acquisita contemporaneamente.
In definitiva, ciascuna curva, mostra il livello di correlazione di ciascuna immagine a
banda larga Aj di ALI e CWLi di Hyperion, con tutte le bande iperspettrali Hi dell’immagine a
banda stretta di Hyperion.
Dall’analisi dei grafici appare evidente che ciascuno delle 9 bande CWLj di Hyperion
risulta particolarmente correlata con tutte le altre bande iperspettrali Hi comprese
nell’intervallo spettrale della corrispondente banda larga Aj.
In particolare, le bande CWLj j=1,4 corrispondenti all’intervallo spettrale del visibile,
risultano correlate più dell’85% con le bande SWIR A8 ed A9 centrate a 1640 nm e 2226 nm
rispettivamente; sono correlate in modo vario nell’intervallo spettrale della settima banda a
1244 nm, con ordine crescente dal blu al rosso, tra il 45% ed il 65%.
Completamente scorrelate con le altre bande risultano le bande del vicino infrarosso A5 ed
A6 a 791 e 866 nm, con valori dell’indice di Pearson inferiori al 10%. Poiché la riflettanza
nell’intervallo spettrale del vicino infrarosso è significativamente condizionata dalle
211
caratteristiche, dallo stato e dall’evoluzione della copertura vegetale, tali bande risultano poco
influenzate dalle caratteristiche dei suoli e dai suoi processi.
Infine, la variabilità della curva di correlazione della banda a 1244 nm (A7), è compresa in
un intervallo di valori da 0,45 a 0,70 circa sia per le bande del visibile che del NIR e dello
SWIR, con un andamento abbastanza vario. E’ interessante sottolineare il fatto che
l’intervallo di bande spettrali maggiormente correlate con la banda A7 (a parte l’intervallo
spettrale della banda 7 stessa), è compreso tra 972,99 nm e 1094,09 nm, il cui indice di
Pearson varia tra 0,87 e 0,90 nel quale non si trova posizionata nessuna banda delle immagini
multispettrali ALI/ETM.
Le curve di correlazione in corrispondenza degli intervalli spettrali corrispondenti alle
bande di assorbimento hanno un andamento che risente ovviamente del processo di
assorbimento, riducendo la correlazione al diminuire della transmittanza atmosferica e
viceversa, in corrispondenza dei limiti di tali bande. All’interno delle bande di assorbimento,
la correlazione cala praticamente a 0.0, per tutte le bande Cwl-ALI, in quanto il rapporto
segnale/rumore segnale si riduce e prevalgono le componenti di rumore incorrelate.
Confrontando i grafici di fig. 12a con quelli di fig. 12b si nota una forte similarità di
comportamento delle curve, che denota una equivalenza di informazione statistica tra una
immagine a banda larga ALI e l’immagine Hyperion a banda stretta corrispondente al centro
banda Cwl. Ciò discende immediatamente anche osservando il valore, praticamente 1.0, che
assume l’indice di correlazione della generica banda ALIj in corrispondenza della banda Hi
corrispondente al centro banda.
Lo stesso comportamento di massima, si riscontra nei grafici di figg. 13a e 13b relativi
all’indice di correlazione di Pearson calcolato sulle immagini ALI ed Hyperion acquisite il 14
settembre 2002, cosa che sembra indicare una stabilità temporale delle caratteristiche di
correlazione tra le immagini multispettrali ed iperspettrali.
Indice di correlazione di Pearson
Correlazione ALI cwl ‐ Hyperion spectral radiance (14/09/2002)
Bande ALI
1.00
Absorption
Bands
Ali 1 ‐ Hyp 3
0.80
0.60
Ali 2 ‐ Hyp 7
0.40
Ali 3 ‐ Hyp 15
0.20
Ali 4 ‐ Hyp 24
0.00
Ali 5 ‐ Hyp 37
‐0.20
01 ‐ 426,82
07 ‐ 487,87
13 ‐ 548,92
19 ‐ 609,97
25 ‐ 671,02
31 ‐ 732,07
37 ‐ 793,13
43 ‐ 854,18
49 ‐ 915,23
55 ‐ 972,99
61 ‐ 1033,49
67 ‐ 1094,09
73 ‐ 1154,58
79 ‐ 1215,17
85 ‐ 1275,66
91 ‐ 1336,15
97 ‐ 1396,74
103 ‐ 1457,23
109 ‐ 1517,83
115 ‐ 1578,32
121 ‐ 1638,81
127 ‐ 1699,10
133 ‐ 1759,89
139 ‐ 1820,48
145 ‐ 1880,98
151 ‐ 1941,57
157 ‐ 2002,06
163 ‐ 2062,55
169 ‐ 2123,14
175 ‐ 2183,63
181 ‐ 2244,22
187 ‐ 2304,71
193 ‐ 2365,20
‐0.40
Ali 6 ‐ Hyp 44
Ali 7 ‐ Hyp 82
Ali 8 ‐ Hyp 121
banda spettrale
Fig. 13a – Indice di correlazione di Pearson tra bande Hyperion corrispondenti ai centro
banda CWL delle bande multispettrali di ALI, e tutte le bande dell’immagine iperspettrale
Hyperion del 14/09/2002
212
Bande assorbimento
0.8
Bande ALI
0.6
ALI‐B1
0.4
ALI‐B2
0.2
ALI‐B3
0
ALI‐B4
‐0.2
‐0.4
ALI‐B5
ALI‐B6
01 ‐ 426,82
08 ‐ 498,04
15 ‐ 569,27
22 ‐ 640,50
29 ‐ 711,72
36 ‐ 782,95
43 ‐ 854,18
50 ‐ 925,41
57 ‐ 993,17
64 ‐ 1063,79
71 ‐ 1134,38
78 ‐ 1205,07
85 ‐ 1275,66
92 ‐ 1346,25
99 ‐ 1416,94
106 ‐ 1487,53
113 ‐ 1558,12
120 ‐ 1628,81
127 ‐ 1699,10
134 ‐ 1769,99
141 ‐ 1840,58
148 ‐ 1911,27
155 ‐ 1981,86
162 ‐ 2052,45
169 ‐ 2123,14
176 ‐ 2193,73
183 ‐ 2264,32
190 ‐ 2335,01
Indice di correlazione di Pearson
Correlazione bande riflettanza ALI - Hyperion (14/09/2002)
1
ALI‐B7
ALI‐B8
ALI‐B9
Banda spettrale
Fig. 13b – Indice di correlazione di Pearson tra le bande dell’immagine multispettrale di
ALI del 14/09/2002 e le 196 bande dell’immagine Hyperion acquisita contemporaneamente.
Le caratteristiche di correlazione tra dati ALI ed Hyperion alle varie lunghezze d’onda, sono
confermate dal grafico di fig. 14, nel quale sono tracciate le curve di correlazione di Pearson
di ciascuna banda spetrale ALI con le altre, riferite al passggio del 12 luglio 2002. Appare
chiaro come le bande 1-4 e 8-9 siano fortemente correlate tra loro, ed invece hanno un valore
di correlazione vicino a zero con le due bande del vicino infrarosso A5 e A6. Similmente,
anche il grafico di correlazione relativo alla banda A7 a 1244 nm, è una schematizzazione
“sintetica” del comportamento riscontrato nei grafici precedenti.
Indice di correlazione di Pearson
Correlazione bande riflettanza ALI (12/07/2002)
1.200
ALI‐B1
1.000
ALI‐B2
0.800
ALI‐B3
0.600
ALI‐B4
ALI‐B5
0.400
ALI‐B6
0.200
ALI‐B7
0.000
1
‐0.200
2
3
4
5
6
banda spettrale
7
8
9
ALI‐B8
ALI‐B9
Fig. 14 – Indice di correlazione di Pearson di ciascuna banda ALI con tutte le altre,
relativamente alla acquisizione del 12/07/2002.
Infine, per verificare la “similarità” statistica di ciascuna banda Hyperion, relativamente
alla dimensione temporale, è stata calcolato l’indice di correlazione di Pearson tra le due
immagini iperspettrali Hyperion del 12 luglio e del 14 settembre 2002 (fig. 15). Ciascun punto
del grafico di fig. 15 indica il valore dell’indice di correlazione della stessa banda spettrale
acquisita in due momenti differenti.
Anche in questo grafico è evidente che negli intervalli spettrali corrispondenti alle bande
multispettrali ETM, il valore dell’indice di correlazione tende a rimanere costante, denotando
una stabilità della correlazione nel tempo compresa tra il 40% della banda NIR al 70-80% per
213
le altre bande del VIS e dello SWIR. Particolarmente “smoothed” o regolari appaiono le
bande SWIR.
Correlazione multitemporale Hyperion 12/07/2002 ‐ 14/09/2002
Bande ETM
Correlazione (W33) multitemporale bande 12/07/2002 ‐ 14/09/2002
01 ‐ 426,82
06 ‐ 477,69
11 ‐ 528,57
16 ‐ 579,45
21 ‐ 630,32
26 ‐ 681,20
31 ‐ 732,07
36 ‐ 782,95
41 ‐ 833,83
46 ‐ 884,70
51 ‐ 932,64
56 ‐ 983,08
61 ‐ 1033,49
66 ‐ 1083,99
71 ‐ 1134,38
76 ‐ 1184,87
81 ‐ 1235,27
86 ‐ 1285,76
91 ‐ 1336,15
96 ‐ 1386,65
101 ‐ 1437,04
106 ‐ 1487,53
111 ‐ 1537,92
116 ‐ 1588,42
121 ‐ 1638,81
126 ‐ 1689,30
131 ‐ 1739,70
136 ‐ 1790,19
141 ‐ 1840,58
146 ‐ 1891,07
151 ‐ 1941,57
156 ‐ 1991,96
161 ‐ 2042,45
166 ‐ 2092,84
171 ‐ 2143,34
176 ‐ 2193,73
181 ‐ 2244,22
186 ‐ 2294,61
191 ‐ 2345,11
196 ‐ 2395,50
Indice di correlazione di Pearson
Bande assorbimento
1.00
0.90
0.80
0.70
0.60
0.50
0.40
0.30
0.20
0.10
0.00
banda spettrale
Fig. 15 – Indice di correlazione di Pearson di due immagini iperspettrali Hyperion
E’ importante sottolineare che queste considerazione sulla correlazione della stessa banda
in due acquisizioni differenti, non intende assolutamente asserire che i livelli di riflettanza
siano gli stessi, ma che tendono ad essere legati da una relazione lineare. Questo è
significativo per la stima delle variazioni di umidità in quanto, l’aumento di umidità del suolo
determina una generale diminuzione della riflettanza, lasciando pressoché inalterato il valore
di correlazione o di angolo spettrale (SAM).
6.8.8.9 CORRELAZIONE SPETTRI DI RIFLETTANZA – MISURE
PLUVIOMETRICHE
Per ridurre l’eterogeneità dell’informazione compresa nell’area di studio, questa è stata
suddivisa in due sottoinsiemi di punti relativi ai punti della scena che hanno mantenuto la loro
caratteristica di suolo nudo o copertura vegetale in ognuna delle immagini della sequenza
multitemporale ETM, acquisite rispettivamente il 12/07, 13/08, 14/09 e 30/09 2002.
L’immagine del 26/06/2002 è stata esclusa a causa delle condizioni di copertura nuvolosa
sparsa. Tutti i punti relativi ad aree con caratteristiche di copertura mista suolo-vegetato o
parzialmente vegetato, sono state escluse dalle elaborazioni.
La fig. 16 mostra i due sottoinsiemi di punti con caratteristiche stabili nel tempo di suolo
nudo e vegetato. I due sottoinsiemi non sono congruenti per quanto riguarda l’estensione, ma
ambedue comprendono un numero sufficientemente alto di punti, tale da non influire sui
risultati delle analisi.
214
A) ETM 543
B) SUOLO NUDO
Fig. 16
C) VEGETATO
La sequenza di immagini ETM+ ed Hyperion sono quindi state suddivise in due sequenze
distinte, relative rispettivamente alle zone nell’area di studio caratterizzate da suolo nudo o
vegetazione in tutte le immagini della sequenza multitemporale, e su ciascuna delle due
sequenze sono state applicate separatamente le stesse analisi.
I grafici riflettanza spettrale media del suolo nudo e della vegetazione relativi alle due
scene Hyperion disponibili del 12 luglio e del 14 settembre 2002 , sono riportati in fig. 17a e
17b.
Suolo nudo
12‐lug
14‐set
0.400
Riflettanza
0.350
0.300
0.250
0.200
0.150
0.100
0.050
01 ‐ 426,82
07 ‐ 487,87
13 ‐ 548,92
19 ‐ 609,97
25 ‐ 671,02
31 ‐ 732,07
37 ‐ 793,13
43 ‐ 854,18
49 ‐ 915,23
55 ‐ 972,99
61 ‐ 1033,49
67 ‐ 1094,09
73 ‐ 1154,58
79 ‐ 1215,17
85 ‐ 1275,66
91 ‐ 1336,15
97 ‐ 1396,74
103 ‐ 1457,23
109 ‐ 1517,83
115 ‐ 1578,32
121 ‐ 1638,81
127 ‐ 1699,10
133 ‐ 1759,89
139 ‐ 1820,48
145 ‐ 1880,98
151 ‐ 1941,57
157 ‐ 2002,06
163 ‐ 2062,55
169 ‐ 2123,14
175 ‐ 2183,63
181 ‐ 2244,22
187 ‐ 2304,71
193 ‐ 2365,20
0.000
Banda spettrale
Fig. 17a – Riflettanza spettrale media multitemporale delle aree denudate estratte dalle immagini
Hyperion
215
Vegetazione
12‐lug
14‐set
0.400
Riflettanza
0.350
0.300
0.250
0.200
0.150
0.100
0.050
01 ‐ 426,82
07 ‐ 487,87
13 ‐ 548,92
19 ‐ 609,97
25 ‐ 671,02
31 ‐ 732,07
37 ‐ 793,13
43 ‐ 854,18
49 ‐ 915,23
55 ‐ 972,99
61 ‐ 1033,49
67 ‐ 1094,09
73 ‐ 1154,58
79 ‐ 1215,17
85 ‐ 1275,66
91 ‐ 1336,15
97 ‐ 1396,74
103 ‐ 1457,23
109 ‐ 1517,83
115 ‐ 1578,32
121 ‐ 1638,81
127 ‐ 1699,10
133 ‐ 1759,89
139 ‐ 1820,48
145 ‐ 1880,98
151 ‐ 1941,57
157 ‐ 2002,06
163 ‐ 2062,55
169 ‐ 2123,14
175 ‐ 2183,63
181 ‐ 2244,22
187 ‐ 2304,71
193 ‐ 2365,20
0.000
Banda spettrale
Fig. 17b – Riflettanza spettrale media multitemporale delle aree vegetate estratte ai dati Hyperion
Sia per i grafici del suolo che per quelli della vegetazione, si evidenzia una generale
tendenza alla diminuzione della riflettanza tra l’acquisizione del 12 luglio e quella del 14
settembre, in tutti gli intervalli spettrali di trasmittanza.
Il grafico differenza degli spettri di riflettanza del suolo nudo relativi alle due date (fig.
18a), calcolato mediante la formula:
Δ
i i,t1 – i,t2
i 1,196 in cui i,t1 e i,t2 sono le misure di riflettanza media della banda i-esima, reative alle
acquisizione al tempo t1 e t2, del 12 luglio e del 14 settembre, mostra un andamento
discontinuo secondo una curva tendenzialmente convessa, se si esclude le bande di
assorbimento atmosferico.
Un comportamento molto simile si riscontra anche per le aree vegetate (fig. 18) anche se in
pratica il suolo nudo mostra una dinamica circa il doppio di quella della vegetazione.
Assorbimento atmosferico
Suolo nudo
Vegetato
0.1
Riflettanza (W/m‐2∙ µm‐1 ∙ st‐1)
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
01 ‐ 426,82
06 ‐ 477,69
11 ‐ 528,57
16 ‐ 579,45
21 ‐ 630,32
26 ‐ 681,20
31 ‐ 732,07
36 ‐ 782,95
41 ‐ 833,83
46 ‐ 884,70
51 ‐ 932,64
56 ‐ 983,08
61 ‐ 1033,49
66 ‐ 1083,99
71 ‐ 1134,38
76 ‐ 1184,87
81 ‐ 1235,27
86 ‐ 1285,76
91 ‐ 1336,15
96 ‐ 1386,65
101 ‐ 1437,04
106 ‐ 1487,53
111 ‐ 1537,92
116 ‐ 1588,42
121 ‐ 1638,81
126 ‐ 1689,30
131 ‐ 1739,70
136 ‐ 1790,19
141 ‐ 1840,58
146 ‐ 1891,07
151 ‐ 1941,57
156 ‐ 1991,96
161 ‐ 2042,45
166 ‐ 2092,84
171 ‐ 2143,34
176 ‐ 2193,73
181 ‐ 2244,22
186 ‐ 2294,61
191 ‐ 2345,11
196 ‐ 2395,50
0
Banda spettrale
Fig. 18 – Differenza mulitemporale della riflettanza spettrale mediata spazialmente per le
aree a suolo nudo e vegetate.
216
Calcolando la differenza normalizzata percentuale
Δ
%i i,t1 – i,t2
·100 / i,t1 i 1,196 si ottengono i grafici di fig. 19 per il suolo nudo e la copertura vegetale, che mostrano un
andamento tendenzialmente più lineare (sempre escludendo le bande di assorbimento).
Allo scopo di escludere visivamente le porzioni di grafico relative alle bande di
assorbimento atmosferico principali, sia nei grafici relativi alla differenza Δ i, che alla
differenza normalizzata percentuale Δ %i sono stati evidenziati in giallo gli intervalli spettrali
corrispondenti alle bande di assorbimento.
Assorbimento atmosferico
80
70
Riflettanza
60
50
40
30
20
10
01 ‐ 426,82
06 ‐ 477,69
11 ‐ 528,57
16 ‐ 579,45
21 ‐ 630,32
26 ‐ 681,20
31 ‐ 732,07
36 ‐ 782,95
41 ‐ 833,83
46 ‐ 884,70
51 ‐ 932,64
56 ‐ 983,08
61 ‐ 1033,49
66 ‐ 1083,99
71 ‐ 1134,38
76 ‐ 1184,87
81 ‐ 1235,27
86 ‐ 1285,76
91 ‐ 1336,15
96 ‐ 1386,65
101 ‐ 1437,04
106 ‐ 1487,53
111 ‐ 1537,92
116 ‐ 1588,42
121 ‐ 1638,81
126 ‐ 1689,30
131 ‐ 1739,70
136 ‐ 1790,19
141 ‐ 1840,58
146 ‐ 1891,07
151 ‐ 1941,57
156 ‐ 1991,96
161 ‐ 2042,45
166 ‐ 2092,84
171 ‐ 2143,34
176 ‐ 2193,73
181 ‐ 2244,22
186 ‐ 2294,61
191 ‐ 2345,11
196 ‐ 2395,50
0
Banda spettrale
Fig. 19 – Differenza mulitemporale normalizzata % della riflettanza spettrale mediata
spazialmente per le aree a suolo nudo e vegetate
La tendenza generale decrescente dello spettro di riflettanza tra le due acquisizioni del 12
luglio e del 14 settembre appare consistente con l’andamento cumulato della pluviometria nei
giorni antecedenti i due passaggi satellitari, riportata nuovmente in fig. 20 per comodità di
consultazione.
Poiché in corrispondenza delle bande di assorbimento atmosferico non si notano variazioni
di riflettanza apprezzabili, anche in corrispondenza delle bande minori a 760 nm, 932 nm e
1124 nm questo, come discusso in precedenza, porta ad escludere un differente effetto di
assorbimento atmosferico sulle due acquisizioni.
Di conseguenza, le variazioni di riflettanza spettrale nelle bande di trasparenza non
dipendono tanto dall’atmosfera, quanto da altri fattori ambientali. Poiché nel caso dei suoli, le
caratteristiche chimico-fisiche tendono a cambiare molto lentamente nel tempo, il principale
fattore che influenza la variazione di riflettanza in periodi brevi è proprio l’umidità del suolo.
217
Acquisizione satellite
precipitazione cumulativa antecedente
Precipitazione media giornaliera
120
Precipitazione (mm/g)
100
80
60
40
20
01‐lug
03‐lug
05‐lug
07‐lug
09‐lug
11‐lug
13‐lug
15‐lug
17‐lug
19‐lug
21‐lug
23‐lug
25‐lug
27‐lug
29‐lug
31‐lug
02‐ago
04‐ago
06‐ago
08‐ago
10‐ago
12‐ago
14‐ago
16‐ago
18‐ago
20‐ago
22‐ago
24‐ago
26‐ago
28‐ago
30‐ago
01‐set
03‐set
05‐set
07‐set
09‐set
11‐set
13‐set
15‐set
17‐set
19‐set
21‐set
23‐set
25‐set
27‐set
29‐set
01‐ott
0
Data
Fig. 20 Precipitazione media giornaliera nella nella zona dell’area di studio nel periodo
dal 1 luglio al 30 settembre 2002. Le barre in rosso indicano le date di acquisizione del/i
satellite/i.
6.8.8.10
Correlazione indici di umidità e misure pluviometriche
La sequenza multitemporale di immagini ETM+ è stata quindi impiegata per confrontare i
risultati ottenuti da alcuni degli indici per la stima dell’umidità (tab. I) selezionati, basati
sull’impiego di due o tre bande spettrali.
Sono stati applicati gli algoritmi NDII, NMDI, NSMI che utilizzano bande di riflettanza
spettrale, le cui formulazioni sono riportate in tab. I. E’ stato considerto anche il metodo
MTVI (Multitemporal Temperature Vegetation Index) che rappresenta un’estensione
multitemporale dell’approccio metodologico Ts-VI, basato sulla relazione fisica tra
vegetazione, misurata dall’indice NDVI, e la temperatura del suolo Ts, estratta dalla banda
termica di sensori multispettrali quali il TM/ETM+, ASTER, MODIS, ecc.
Gli algoritmi sono stati applicati separatamente alle sequenze multitemporali relative al
suolo nudo ed alla copertura vegetale. Di ciascuna mappa di umidità ottenuta e per ciascun
algoritmo è stato quindi calcolato il valore medio di tutti i punti compresi nella scena per la
classe suolo e vegetazione. L’andamento nel tempo delle stime relative al suolo ed alla
vegetazione ottenute dai differenti algoritmi sono stati confrontati tra loro e con l’andamento e
con l’andamento della pluviometria di fig. 20.
La tab. III riporta i risultati ottenuti dall’applicazione degli algoritmi selezionati per le due
classi di suolo nudo e vegetato alle immagini della sequenza.
SUOLO NUDO VALOR MEDIO 12/07 MTVI NMD NDII NSMI 13/08 0,253 0,511
0,413 0,439
0,2 ‐0,176
‐0,845 14/09 VEGETATO 30/09 0,721
0,705
0,473
0,497
0,159
‐0,152
‐0,76 12/07/2002 13/08 0,275 0,549 0,467 0,467 0,352 0,181 ‐0,759 14/09 30/09 0,713 0,798
0,498 0,495
0,391 0,243
‐0,575 Tab. III – Valor medio della stima dello stato di umidità per il suolo e la vegetazione, ottenuti
dall’applicazione alle immagini della sequenza ETM dei diversi algoritmi.
218
La fig. 21a e 21b mostrano invece i grafici a barre relativi agli stessi andamenti della
tabella, in cui i valori relativi all’algoritmo NDII sono complementati.
La fig. 22 mostra il risultato ottenuto dall’algoritmo NSMI che utilizza due bande
Hyperion nella regione dello SWIR, centrate a 1800 nm e 2119 nm, applicato alle uniche due
immagini Hyperion disponibili.
Dall’andamento pluviometrico della fig 20 e della curve di precipitazione cumulata nei
giorni antecedente a ciascun passaggio, appare evidente che nel periodo antecedente il primo
passaggio il 12 luglio 2002, non si è verificata alcuna precipitazione quindi il terreno al
momento del passaggio ha un livello basso o molto basso di umidità. L’acquisizione
successiva, del 13 agosto, è preceduta da precipitazioni abbastanza continue e in particolare
l’11 agosto, due giorni prima del passaggio sono state misurate precipitazioni abbastanza
elevate su tutta la zona per un valore medio di circa 40 mm. E’ evidente che il giorno
dell’acquisizione il terreno non ha avuto tempo di asciugarsi e quindi dovrebbe manifestare il
livello più alto di umidità rispetto agli altri giorni della sequenza. I giorni antecedenti le
ultime due acquisizioni del 14 e del 30 settembre, sono caratterizzati da un andamento
pluviometrico abbastanza simile, cosicché il livello di umidità superficiale dovrebbe risultare
dello stesso ordine di grandezza, ma superiore all’acquisizione del 12 luglio ed inferiore a
quella del 13 agosto.
Suolo nudo
Vetazione
1
umidità relativa
umidità relativa
1.5
1
MTVI
0.5
NMDI
NDII
0
0.8
0.6
MTVI
0.4
NMDI
0.2
NDII
0
12/07 13/08 14/09 30/09
12/07 13/08 14/09 30/09
giorno
giorno
Fig.21 – Stima della media spaziale dello stato di umidità relativo ottenuto per il suolo
nudo e il suolo vegetato dall’applicazione degli algoritmi alle immagini ETM della sequenza.
indice relativo umidità
NSMI ‐ Normalized Soil Moisture Index
(1800 nm, 2119 nm)
0.5
0.4
0.3
0.2
suolo nudo
0.1
vegetato
0
12/07
13/08
14/09
30/09
data
Fig.22 – Stima della media spaziale dello stato di umidità relativo ottenuto per il suolo
nudo e il suolo vegetato dall’applicazione dell’algoritmo NSMI alle bande centrate a 1800nm
e 2119 nm delle due immagini Hyperion disponibili.
219
Osservando i risultati ottenuti dall’applicazione dei metodi di stima dell’umidità si
evidenzia una sostanziale uniformità di comportamento nella stima relativa dello stato di
umidità superficiale per tutti i metodi, tranne l’NDII. Peraltro, solo il metodo NDII individua
correttamente la situazione di maggiore umidità il 13 e la situazione più secca il giorno 12
luglio relativo alla prima acquisizione.
Questo andamento si riscontra anche nel grafico relativo alle zone vegetate.
Gli altri metodi MTVI e NMDI, invece, non fanno corrispondere il passaggio del 13 agosto
alla situazione più umida. L’algoritmo MTVI riconosce la situazione di maggiore umidità del
periodo il giorno 14 settembre, mentre l’NMDI stima una situazione praticamente uguale
anche per l’ultima immagine del 30 settembre.
L’incertezza dei risultati è confermata anche dai grafici di fig. 23a e 23b che mostrano
l’andamento del valore medio spaziale delle 6 bande ETM+ per le quattro immagini della
sequenza separatamente per le due classi di suolo nudo (fig. 23a) e vegetato (fig. 23b).
SUOLO VEGETATO
Riflettanza spettrale media ETM+
0.3
0.25
Riflettanza
0.3
0.25
12‐lug
0.2
0.15
0.1
0.2
13‐ago
13‐ago
0.15
14‐set
0.1
30‐set
0.05
12‐lug
Riflettanza
0.35
SUOLO NUDO
Riflettanza spettrale media ETM+
14‐set
30‐set
0.05
0
0
1
2
3
4
5
1
6
2
3
4
5
6
Banda spettrale
Banda spettrale
Fig.23a
Fig.23b
In accordo al comportamento generale della riflettanza dei suoli all’aumentare dello stato
di umidità, lo spettro relativo alla situazione più secca del 12 luglio ha una forma similare agli
altri, ma un livello di riflettanza più elevato. Con valori di riflettanza minori dovremmo
identificare i due spettri relativi alle ultme due acquisizioni, ed infine, con il livello minore di
riflettanza, la curva relativa al 13 agosto. In realtà, anche queste misure tendon ad invertire,
anche se di poco, la situazione di umidità tra il 13 agosto e le ultime due date.
6.8.8.11
CONCLUSIONI
La complessità del problema di stimare uno stato relativo di umidità superficiale del
territorio, comprendente suolo nudo, vegetazione, suoli misti ed antropizzati, data la
complessità ed eterogeneità dell’ambiente naturale, non può evidentemente essere descritto da
modelli teorico-analitici o sperimentati in laboratorio, ma richiedono un lungo lavoro di
approfondimento sperimentale per identificare se e quali siano le relazioni empirico-euristiche
adeguate a garantire un buon livello di efficienza unitamente ad una elevata stabilità e quindi
affidabilità del loro impiego per scopi di monitoraggio nel tempo.
Di fondamentale importanza per una corretta interpretazione dei risultati ottenute dalle
varie elaborazioni, è il potere disporre di sequenze di immagini multispettrali ed iperspettrali
affidabili dal punto di vista informativo, e cioè adeguatamente validate e coerenti tra di loro
220
sia dal punto di vista della coregistrazione spaziale, sia per coerenza spettrale relativamente
agli effetti di distorsione atmosferica.
BIBLIOGRAFIA
Angstrom, A. (1925). The albedo of various surfaces of ground. Geografiske Annales, 7, pp. 323-327.
Bowers, S. A., & Hanks, R. J. (1965). Reflection of radiant energy from soils. Soil Science, 100 (3), 130, 138.
Carlà, R., Fontanelli, K., Santurri, L. (2009).
Chen, D., J. Huang, and T. J. Jackson. (2005). Vegetation Water Content Estimation for Corn and Soybeans
Using Spectral Indices Derived from Modis Near- and Short-Wave Infrared Bands. Remote Sensing of
Environment 98, 225–236.
Curcio, J. A., & Petty, C. C. (1951). The near infrared absorption spectrum of liquid water. Journal of the Optical
Society of America, 41 (5), 302– 304.
Elvidge, C. D. (1990). Visible and Infrared Reflectance Characteristics of Dry Plant Materials. International
Journal of Remote Sensing 11, 1775–1795.
Gao, B. C. (1996). NDWI—A Normalized Difference Water Index for Remote Sensing of Vegetation Liquid
Water from Space. Remote Sensing of Environment 58, 257–266.
Hardisky, M. A., V. Klemas, and R. M. Smart. (1983). The Influences of Soil Salinity, Growth form, and Leaf
Moisture on the Spectral Reflectance of Spartina Alterniflora Canopies. Photogrammetric Engineering and
Remote Sensing 49, 77–83.
HAUBROCK, S.-N. CHABRILLAT, S., LEMMNITZ, C., and KAUFMANN, H. (2008). Surface soil
moisture quantification models from reflectance data under field conditions. Int. J. of Remote Sensing,.
29(1), 3-29.
Lobell, D., and Asner, G., 1970. Moisture effects on soil reflectance. Soil Sci. Soc. Am. J. 66, 722–727 (2002)
Planet, W. G. (1970). Some comments on reflectance measurements of wet soils. Remote Sensing of
Environment, 1, 127– 129.
Stoner, E.R., and Baumgardenr, M.F., 1981, Characteristics variations in reflectance of surface soils. Soil
Science Society America Journal, 45, 1161–1165.
Wang, L., and J. J. Qu. (2007). NMDI: A Normalized Multi-Band Drought Index for Monitoring Soil and
Vegetation Moisture with Satellite Remote Sensing. Geophysical Research Letters 34,:L20405.
doi:10.1029/2007GL031021.
Weidong, L., Baret, F., Xingfa, G., Qingxi, T., Lanfen, Z., and Bing, Z. (2002). Relating soil surface moisture to
reflectance. Rem. Sens. Environ. 81, 238–246.
Weidong, L., Baret, F., Xingfa, G., Bing, Z., Qingxi, T., and Lanfen, Z. (2003). Evaluation of methods for
surface soil moisture estimation from reflectance data. Int. J. Rem. Sens. 24(10), 2069–2083.
Zhang, N., Hong, Y., Qin, Q., and Liu, L. (2013). VSDI: a visible and shorwave infrared drought index for
monitoring soil and vegetation moisture based on optical remote sensing. Int. J. of Rem. Sens., 34(13), 45854609.
221
6.8.8.12
APPENDICE A1
Corrispondenza bande spettrali HYPERION
Band
λ
Band
λ
Band
λ
Band
λ
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
426,82
436,99
447,17
457,34
467,52
477,69
487,87
498,04
508,22
518,39
528,57
538,74
548,92
559,09
569,27
579,45
589,62
599,80
609,97
620,15
630,32
640,50
650,67
660,85
671,02
681,20
691,37
701,55
711,72
721,90
732,07
742,25
752,43
762,60
772,78
782,95
793,13
803,30
813,48
823,65
833,83
844,00
854,18
864,35
874,53
884,70
894,88
905,05
915,23
925,41
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
932,64
942,73
952,82
962,91
972,99
983,08
993,17
1003,30
1013,30
1023,40
1033,49
1043,59
1053,69
1063,79
1073,89
1083,99
1094,09
1104,19
1114,19
1124,28
1134,38
1144,48
1154,58
1164,68
1174,77
1184,87
1194,97
1205,07
1215,17
1225,17
1235,27
1245,36
1255,46
1265,56
1275,66
1285,76
1295,86
1305,96
1316,05
1326,05
1336,15
1346,25
1356,35
1366,45
1376,55
1386,65
1396,74
1406,84
1416,94
1426,94
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
1437,04
1447,14
1457,23
1467,33
1477,43
1487,53
1497,63
1507,73
1517,83
1527,92
1537,92
1548,02
1558,12
1568,22
1578,32
1588,42
1598,51
1608,61
1618,71
1628,81
1638,81
1648,90
1659,00
1669,10
1679,20
1689,30
1699,40
1709,50
1719,60
1729,70
1739,70
1749,79
1759,89
1769,99
1780,09
1790,19
1800,29
1810,38
1820,48
1830,58
1840,58
1850,68
1860,78
1870,87
1880,98
1891,07
1901,17
1911,27
1921,37
1931,47
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
1941,57
1951,57
1961,66
1971,76
1981,86
1991,96
2002,06
2012,15
2022,25
2032,35
2042,45
2052,45
2062,55
2072,65
2082,75
2092,84
2102,94
2113,04
2123,14
2133,24
2143,34
2153,34
2163,43
2173,53
2183,63
2193,73
2203,83
2213,93
2224,03
2234,12
2244,22
2254,22
2264,32
2274,42
2284,52
2294,61
2304,71
2314,81
2324,91
2335,01
2345,11
2355,21
2365,20
2375,30
2385,40
2395,50
222
7 CONCLUSIONI
223
© Copyright 2026 Paperzz