14^ parte : Sensore a ultrasuoni HC SR04 e Arduino
Author: Ing. Sebastiano Giannitto (ITIS “M.BARTOLO” –PACHINO)
La GPRS Shield
Un sensore a ultrasuoni come il HC SR 04 misura il tempo impiegato dalle onde sonore
emesse da una sorgente a ritornare dopo aver incontrato un ostacolo che le riflette. Il
fascio di onde sonore emesso ha forma conica e lo stesso vale per le onde riflesse da
un ostacolo, questo fa si che il sensore riceva molte riflessioni da diversi oggetti, ciò
rende il sensore, da solo, incapace di distinguere un oggetto da un altro o aperture negli
oggetti troppo piccoli.
Calcolo della distanza
La velocità del suono nell’aria alla temperatura di 20°è di
circa 343,4 m/s, qui useremo la velocità approssimata di 340
m/s per semplicità, se è necessaria una maggior precisione
si può usare la seguente legge in funzione della
temperatura t:
V = 331.4 + 0.62*t
Il sensore restituisce il tempo impiegato per andare e tornare
dalle onde sonore in microsecondi, inoltre è comodo avere la
misura in cm, quindi bisogna convertire la velocità del suono
da m/s in cm/microsecondo:
1 m/s = 10^2/10^6 cm/microsec = 10^-4 cm/microsec => 340 m/s = 3,4*10^-2
cm/microsec
Il tutto va ancora diviso per 2 in quanto il tempo che abbiamo convertito è quello
impiegato per andare e tornare indietro dalle onde, mentre per calcolare la distanza
dall’oggetto ci basta metà di questo tempo, la formula finale, dove t è il tempo restituito
dal sensore in cm/microsec è: S = 1.7 * 10^-2 * t cm
La GPRS Shield
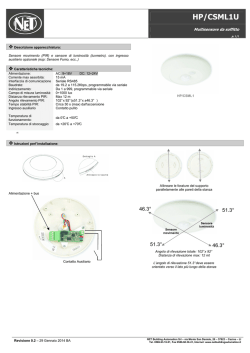
HC SR 04
Il sensore dispone di 4 pin: Vcc (+5V), Trigger, Echo, GND. Si invia un impulso alto
sul pin Trigger per almeno 10 microsec, a questo punto il sensore invierà il ping
sonoro e aspetterà il ritorno delle onde riflesse, il sensore risponderà sul pin Echo
con un impulso alto della durata corrispondente a quella di viaggio delle onde
sonore, dopo 38 millisec si considera che non sia stato incontrato alcun ostacolo.
Per sicurezza si aspettano in genere 50-60 millisec per far si che non vi siano
interferenze con la misura successiva.
Per maggiori informazioni c’è il datasheet.
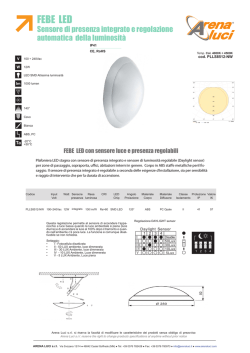
Connettere Arduino e il sensore
Basta connettere il sensore a +5V e GND di arduino rispettivamente ai pin Vcc e
GND del sensore, e Trigger ed Echo a due porte qualsiasi di Arduino( o anche una
sola se si fosse a corto di uscite ). Lo schema è il seguente:
Lo sketch di prova
//HC RS04 Sensore ultrasuoni
int triggerPort = 7;
int echoPort = 8;
Serial.print( "durata: " );
Serial.print( duration );
Serial.print( " , " );
Serial.print( "distanza: " );
void setup()
{
//dopo 38ms è fuori dalla portata del sensore
if( duration > 38000 ) Serial.println( "fuori portata");
pinMode( triggerPort, OUTPUT );
else { Serial.print( r );
pinMode( echoPort, INPUT );
Serial.println( "cm" );}
Serial.begin( 9600 );
Serial.println( "Sensore ultrasuoni: "); //aspetta 1.5 secondi
delay( 1500 );
}
}
void loop() {
//porta bassa l'uscita del trigger
digitalWrite( triggerPort, LOW );
//invia un impulso di 10microsec su trigger
digitalWrite( triggerPort, HIGH );
delayMicroseconds( 10 );
digitalWrite( triggerPort, LOW );
long duration = pulseIn( echoPort, HIGH );
long r = 0.034 * duration / 2;
Video
https://www.youtube.com/watch?v=3rSUEg2ZzsE
Variante con display
//HC RS04 Sensore ultrasuoni
const int triggerPort = 9;
const int echoPort = 10;
const int led = 13;
Serial.print(distanza);
Serial.println(" cm ");
}
void setup()
{
pinMode(triggerPort, OUTPUT);
pinMode(echoPort, INPUT);
pinMode(led, OUTPUT);
Serial.begin(9600);
Serial.print( "Sensore Ultrasuoni: ");
}
void loop() {
if(distanza < 10){
digitalWrite(led, HIGH);
}
else{
digitalWrite(led, LOW);
}
//porta bassa l'uscita del trigger
digitalWrite( triggerPort, LOW );
//invia un impulso di 10microsec su trigger
digitalWrite( triggerPort, HIGH );
delayMicroseconds( 10 );
digitalWrite( triggerPort, LOW );
long durata = pulseIn( echoPort, HIGH );
long distanza = 0.034 * durata / 2;
Serial.print("distanza: ");
//dopo 38ms è fuori dalla portata del sensore
if( durata > 38000 ){
Serial.println("Fuori portata ");
}
else{
//Aspetta 1000 microsecondi
delay(1000);
}
Scketch con display lcd:
#include <LiquidCrystal.h>
const int triggerPort = 9;
const int echoPort = 10;
const int led = 13;
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
void setup() {
pinMode(triggerPort, OUTPUT);
pinMode(echoPort, INPUT);
pinMode(led, OUTPUT);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print( "Ultrasuoni ");
}
if( durata > 38000 ){
lcd.setCursor(0, 1);
lcd.println("Fuori portata ");
}
else{
lcd.print(distanza);
lcd.println(" cm ");
}
if(distanza < 10){
digitalWrite(led, HIGH);
}
else{
digitalWrite(led, LOW);
}
//Aspetta 1000 microsecondi
void loop() {
//porta bassa l'uscita del trigger
digitalWrite( triggerPort, LOW );
//invia un impulso di 10microsec su trigger
digitalWrite( triggerPort, HIGH );
delayMicroseconds( 10 );
digitalWrite( triggerPort, LOW );
long durata = pulseIn( echoPort, HIGH );
long distanza = 0.034 * durata / 2;
lcd.setCursor(0, 1);
lcd.print("dist.: ");
//dopo 38ms è fuori dalla portata del sensore
delay(1000);
}
Close-up of LCD Wiring
0V
5V
Contrast: 1k to Ground and 10k to 5V
RS: to Arduino pin12
R/W: to 0V
E: to Arduino pin11
DB0: n/c
DB1: n/c
DB2: n/c
DB3: n/c
LCD Module 1602
Solder the 16-pin header (provided) to the
module
Use a 100Ω resistor to connect the
backlight
Use a 10K potentiometer (or 1K and 10K
resistors as shown below) for contrast
Only 4 data pins required in 4 bit mode
DB4: to Arduino pin 5
DB5: to Arduino pin 4
DB6: to Arduino pin 3
DB7: to Arduino pin 2
Anode: to 100Ω or 220Ω resistor; other
end of resistor to 5V
Cathode: to 0V
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
int pingPin = 7; //output 10us pulse to this pin
int inPin = 6; //measure return pulse width from this pin
long duration, inches, cm;
int indec, cmdec;
int inchconv = 147; // ratio between puls width and inches
int cmconv = 59; // ratio between pulse width and cm
String s1, s2; // initialise LCD library and pins
void setup()
setup
{
lcd.begin(16, 2);
pinMode(pingPin, OUTPUT);
pinMode(inPin, INPUT);
}
void loop()
loop
{
// Send a short LOW followed by HIGH pulse to Trigger input:
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(10);
digitalWrite(pingPin, LOW); // read the length of the return pulse on Echo output
duration = pulseIn(inPin, HIGH); // convert the time into a distance (non-floating point with decimals
inches = microsecondsToInches(duration);
indec = (duration - inches * inchconv) * 10 / inchconv;
cm = microsecondsToCentimeters(duration);
cmdec = (duration - cm * cmconv) * 10 / cmconv;
s1 = String(inches) + "." + String(indec) + "in" + " ";
s2 = String(cm) + "." + String(cmdec) + "cm" + " ";
lcd.setCursor(0, 0); // print inches on top line of LCD
lcd.print(s1);
lcd.setCursor(0,1); // print cm on second line of LCD
lcd.print(s2); delay(100);
}
long microsecondsToInches(long microseconds) { return microseconds / inchconv; }
long microsecondsToCentimeters(long microseconds) { return microseconds / cmconv;
}
© Copyright 2026 Paperzz