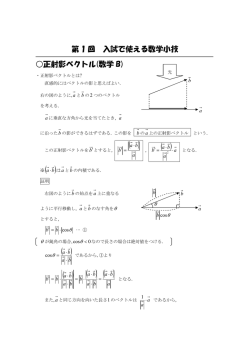
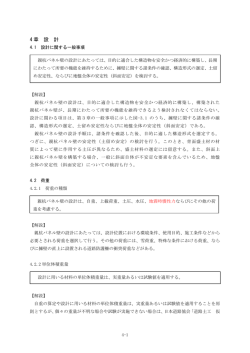
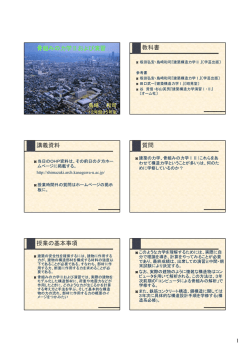
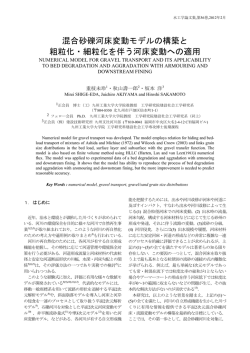
H. Hamano, 14. 長柱の座屈 14 14-1 長柱の座屈 長い柱は圧縮荷重によって折れてしまう場合がある.この現象を座屈といい,座屈するときの荷重を 座屈荷重という. 14.1 換算長 長さ l の柱に荷重が作用する場合,その支持方法によって,柱の理論上の長さ L が異なる.長柱の計 算は,この L を用いて行うと都合がよい.この L を換算長(あるいは有効長さという)という. 座屈荷重は一般に 2 EI 2 EI PK 2 2 , (14.1) L l したがって,座屈応力度は P 2 EI 2 EI 2 EI (14.2) K K A AL2 (L / r )2 2 これは,オイラーの公式といわれるもので,一般に L/r>100 の場合に適用される.また, を細長比と いう.r は断面 2 次半径である. 換算長 L と,実際の長柱の長さ l との間に l2 l L2 L 2 (14.3) の関係がある. は長柱の支持方法によって決まる係数で,これを換算係数という. P P L=2l μ =0.25 l P L 0 .7 l 2 L=l μ =1 P P P L=0.5l μ =4 L≒0.7 ≒2 P P l 図 14.1 換算長と換算係数 は荷重に対する抵抗の強さを示しており,上図の左の系を基準 1 とすると,左から 1 : 4 : 8 : 16 の 割合になっている.たとえば,両端単純支持の長柱は,一端固定他端自由の長柱の 4 倍の強さを持って いることを示している. 14.2 各種長柱公式 前に求めた両端ヒンジの長柱は Hooke の法則が成り立つ範囲で成立する.すなわち,この式は比例限 度 P よりも小さい範囲で適用しなければならない. K 2E P 2 より E P P (14.4) この式において E 2.0 10 5 N/mm 2 , P 235 N/mm 2 とすると, P は約 92 となる.すなわち, は限 界細長比よりも大きい範囲で成り立つ.これ以外の範囲 では次のような実験公式を用いる. H. Hamano, 14. 長柱の座屈 14-2 1) 直線式(テトマイヤー式) (a, b:材料の性質から定まる定数) K a b 2) 双曲線式(ゴルドン・ランキン式) a (a, b:材料の性質から定まる定数) K 1 b2 3) 放物線式(ジョンソン式) (a, b:材料の性質から定まる定数) K a b2 (14.5) (14.6) (14.7) これらの式の関係は次図のようになる. 短柱 テトマイヤーの式 オイラーの公式 P ランキン式 ジョンソン式 図 14.2 各種実験公式 わが国の鋼道路橋示方書では SS400,SM400 に対して許容応力度を次のように設定している(単位は N/mm2). L / r 18 : Ka 1 40 L 18 L / r 92 : Ka 1 40 0.82 18 r 1 200 000 92 L / r : Ka 2 L 6 700 r (14.8) H. Hamano, 14. 長柱の座屈 14-3 14.3 各種長柱の座屈荷重 14.3.1 両端ヒンジ柱の座屈荷重 A P 両端ヒンジの柱に集中荷重 P が軸方向に作用してい る場合を考える. 支点 A より x の点のたわみを y とすると,この点で の曲げモーメントは M x Py (14.9) これを弾性曲線の微分方程式に代入すると M d2y P x y 2 EI EI dx ここで P k2 EI とおくと d2y k2y 0 dx 2 が得られる.式(14.12)の一般解は次のように得られる. y A cos kx B sin kx ここに,A,B は積分定数である.境界条件を適用すると x 0: y 0 A 0 x l : y 0 B s i nkl 0 B P y EI x l y 図 14.3 両端ヒンジの柱 (14.10) (14.11) (14.12) (14.13) (14.14) 式(14.14)の第 2 式において B が 0 であれば式(14.13)は成り立たないから B 0 とおくと s i nkl 0 (14.15) この式を座屈条件式という.これより kl nπ (n 1,2,) (14.16) これを式(18.11)に代入すると n 2 π 2 EI P (14.17) l2 したがって,たわみ式は式(14.13)より nπ y Bs i n x (14.18) l この式の B は不定であり,形状は決まらない.ここでは,n が最小(n=1)の場合が意味を持ち,座屈荷 重は次のようになる. π 2 EI PK 2 (14.19) l したがって,座屈応力度は P 2 EI 2 E 2 E K K 2 (14.20) A l A l / r 2 2 この式で, r I / A は断面 2 次半径, l / r は細長比を表す. 式(14.19)は Euler の座屈荷重といわれ,Hooke の法則が成り立つ範囲で成立する. H. Hamano, 14. 長柱の座屈 14-4 14.3.2 一端固定・他端自由の柱の座屈荷重 l B 図において点 x の曲げモーメントは M x P( y 0 y ) (14.21) これを弾性曲線の微分方程式に代入すると d2y P P y y0 (14.22) EI dx 2 EI これより次式を得る. d2y k 2 y k 2 y0 dx 2 ここに P k2 EI 式(14.23)の一般解は y A c o kx s B s i nkx y0 この式の A,B は積分定数である.境界条件を適用すると x 0 : y 0 A y0 A EI x y0 P y 図 14.4 y 一端固定・他端自由の柱 (14.23) (14.24) (14.25) (14.26) dy 0 B0 dx これよりたわみは y y 0 (1 c o kx s ) (14.27) この式で y 0 は不定であるが, x l : y y 0 より y 0 cos kl 0 が得られる.ここで y 0 0 であるから座屈条 件式は c o kl s 0 (14.28) x 0: これを満足する最小の根は kl π 2 であるから,座屈荷重は π 2 EI (2l ) 2 座屈応力度は P π 2 EI π2E 1 π2E σK K A (2l ) 2 A l 2 4 λ2 2 r PK この式で, r I / A は断面 2 次半径, l / r は細長比を表す. この系の強度は式(14.30)より両端ヒンジの場合の 1/4 であることが分かる. (14.29) (14.30) H. Hamano, 14. 長柱の座屈 14-5 14.3.3 両端固定の柱の座屈荷重 T T A 両端ヒンジの柱に集中荷重 P と,点 A,B のたわみ角が 0 y となるような曲げモーメント M が作用している場合を考え EI x る. l 支点 A より x の点のたわみを y とすると,この点での曲 y げモーメントは 図 14.5 両端固定の柱 (14.31) M x Py T これを弾性曲線の微分方程式に代入すると d2y P P T y 2 EI EI P dx これより d2y T k2y k2 P dx 2 ここに P k2 EI 式(14.33)の一般解はつぎのようになる. T y A cos kx B sin kx P ここに,A,B は積分定数である.境界条件を適用すると T x 0 : y 0 A P dy x 0 : 0 B 0 dx したがって,たわみ式は式(14.26)より T y (1 c o kx s ) P dy また, x l : y 0, 0 より dx 1 c o kl s 0 および s i nkl 0 この座屈条件式を満足する最小値は k l 2 となる.したがって,座屈荷重は π 2 EI PK (l / 2) 2 座屈応力度は P π 2 EI π2E π2E σK K 4 2 2 2 A ( l / 2) A 1 l λ 2 r この式で, r I / A は断面 2 次半径, l / r は細長比を表す. P この系は,式(14.40)より両端ヒンジの柱の 4 倍の強さを示している. B P (14.32) (14.33) (14.34) (14.35) (14.36) (14.37) (14.38) (14.39) (14.40) H. Hamano, 14. 長柱の座屈 14-6 14.3.4 一端固定・他端ヒンジの柱の座屈荷重 両端ヒンジの柱に集中荷重 P と,点 A のたわみ角が 0 となるような曲げモーメント M が作用している場合 を考える.この場合,釣合いが成立するように両端に 垂直反力 T Q (14.41) l が図示のように作用する. T A P B P y x Q EI Q l y 図 14.6 一端固定・他端ヒンジの柱 支点 A より x の点のたわみを y とすると,この点での曲げモーメントは M x Py Q (l x ) これを弾性曲線の微分方程式に代入すると d2y P P Q y (l x ) EI P dx 2 EI これより d2y Q k 2 y k 2 (l x ) 2 P dx ここに P k2 EI 式(14.44)の一般解は Q y A c o skx B s i nkx (l x ) P ここに,A,B は積分定数である.境界条件を適用すると Q x 0: y 0 A l P dy Q x 0: 0 B dx kP したがって,たわみ式は式(14.46)より Q 1 y l c o kx s s i nkx (l x ) P k x l : y 0 また, より次の座屈条件式が得られる. tan kl kl (14.42) (14.43) (14.44) (14.45) (14.46) (14.47) (14.48) (14.49) この式を満足する値は kl 4.493, 7.725, 10.904 , 14.066 , ,このうちの最小値をとって座屈荷重は 20.19 EI π 2 EI π 2 EI 2 . 04 l2 (0.7l ) 2 l2 したがって,座屈応力度は P π 2 EI π2E π2E σK K 2 2 2 2 A (0.7l ) A λ l 0.7 r この式で, r I / A は断面 2 次半径, l / r は細長比を表す. PK この系は,式(14.50)より両端ヒンジの柱の 2 倍の強さを示している. (14.50) (14.51) H. Hamano, 14. 長柱の座屈 14-7 14.3.5 任意横分布荷重が作用するはりの座屈微分方程式 一般に横荷重の作用する座屈の微分方程式を導く.軸方向荷重 P と横荷重 q(x)が作用した場合を考え る. qx q(x) P A P y EI x dx y B Mx l (a) 図 14.7 dy dx Mx+dMx Qx dx Qx+dQx (b) (c) 任意分布荷重の作用する単純支持の柱 微小要素 dx を取り出し,それが変形した状態を図(c)とする. dQ 0 , x q x V 0 : Qx q xdx Q( x dQ x) dx つぎに dy dx M 0 : M x q x dx 2 (Qx dQx )dx (M x dM x ) P dx dx 0 2 次の微小項を無視すると Qx dx dM x P d y 0 ゆえに dM x dy P Qx dx dx 1 回微分して d 2M x d 2 y dQx P dx dx 2 dx 2 ここで, 2 Mx d2y d4y 1 d Mx , EI EI dx 2 dx 2 dx 4 式(14.57)の第 2 式と式(14.52)を式(14.56)に代入すると d4y d2y EI 4 P 2 q x dx dx (14.52) (14.53) (14.54) (14.55) (14.56) (14.57) (14.58) ここで,qx=0 とおくと 2 d4y P 2 d y k 0, ただし k 2 4 2 EI dx dx (14.59) これが横荷重の作用しないときの座屈の微分方程式である.この一般解は y A cos kx B sin kx Cx D (14.60) 式(14.59)は横荷重 q(x)が作用するときの座屈微分方程式である.この式より 2 q d4y 2 d y k k2 x 4 2 P dx dx (14.61) この式の一般解は qx 2 x 2P 式(14.62)に境界条件を適用すれば解が得られる. y A c o skx B s i nkx Cx D (14.62) H. Hamano, 14. 長柱の座屈 14-8 [例題 14.1]次の座屈応力度を求めよ P [解] 1) l2 x l の場合: y1 曲げモーメント: M x P( y1 ) これを弾性曲線の微分方程式に代入すると M d 2 y1 P x ( y1 ) 2 dx E1 I1 E1I1 ここで P k12 E1I1 とおくと d 2 y1 k12 y1 k12 2 dx この式の一般解は次のように得られる y1 A c ok1sx B s i kn1 x ここに,A,B は積分定数である. dy 1 1 k1 A sin k1 x k1B cos k1 x dx 境界条件: x l : y1 より l1 14.8 曲げ剛性の変化する柱 したがって, y2 (1 cos k2 x) x l 2 : 1 2 より ここで, k1l1 k 2l2 l 2 P EI y2 x x l2 の場合: 曲げモーメント: M x P( y 2 ) これを弾性曲線の微分方程式に代入すると M d 2 y2 P x ( y2 ) dx2 E2 I 2 E2 I 2 ここで P k22 E2 I 2 とおくと d 2 y2 k 22 y2 k 22 dx2 この式の一般解は次のように得られる y2 C c o sk2 x D s i nk2 x ここに,C,D は積分定数である. dy 2 2 k2C sin k2 x k2 D cos k2 x dx 境界条件: x 0 : y 2 0 より C x 0 : 2 0 より D 0 B x l 2 E2I2 2) x l 2 : y1 y 2 より E1I1 l A B tan k1l 連続条件; cos k2l2 cos k1l sin k1l1 k1 tan k1l1 tan k2l2 k2 の特別の場合には H. Hamano, 14. 長柱の座屈 l t a n2 2 となるから P EI 14-9 1 l P 2 EI 4 が得られる. よって座屈荷重は 2 EI PK 4l 2 となる. また,座屈応力度は P 2 EI 2 r 2 E 2E 2E K K 2 A 4 Al 2 4l 2 42 4l / r ここに, r I / A は断面 2 次半径, l / r は細長比を表す. [例題 14.2]作用荷重 P=140tf, 長さ l=4m の H 型鋼の座屈荷重を求めよ(工学単位). H 型鋼:300 300 10 15 Y 規格表より 15 I x 20,200 cm 4 300 10 [解]細長比は l 400 53 .0 ry 7.55 1) 鋼材 SS400 の場合: 300 14.9 H 型鋼の座屈 20 93 よりテトマイヤーの式を使う. Ka 1400 8.4( 20) 1400 8.4(53.0 20) 1 1 2 .28k g / c 2m ゆえに,座屈荷重は PK Ka A 1328 .40kgf 132.9tf 1 4 0 t f 2) 鋼材 SM490 の場合: 15 80 よりテトマイヤーの式を使う. Ka 1900 13( 15) 1900 13(53.0 15) 1 4 0 k6 g / c 2m PK Ka A 1406 118.4 166470 .4kgf 166.5tf 1 4 0 t f I x 6,750 cm 4 A 118 .4cm 2 ry 7.55cm
© Copyright 2026 Paperzz