力学.0
.
プリント中の
¤
¡
「力学」(丸善)”を示します。
£佐本 ¢はテキスト,“佐川,本間,
¡
¤
「力学 (I)」(裳華房)”を示します。
£高木 I ¢は参考文献,“高木隆司,
¤
¡
「力学 (II)」(裳華房)”を示します。
£高木 II ¢は参考文献,“高木隆司,
¤
¡
「力学」(岩波)”を示します。
£戸田 ¢は参考文献,“戸田盛和,
オフィスアワー: 水曜 3 講時 (1-513),金曜 3 講時 (2-120)
url: http://www.math.ryukoku.ac.jp/ iida/lecture/lecture.html
力学.1
1 次元の運動とエネルギー
1
¤
£佐本 Lec.
5
¡ ¤
¡¨
¥
¢ £戸田 3-4 ¢ §高木 I p.92 ¦
ここでは x 軸上を動く質点の運動を考える。質点の質量を m,時刻 t での質点の位置を x(t),時刻 t で質点に
働く力 (の x 成分) を Fx (t) とする。運動方程式 (の x 成分) は
m
d2 x(t)
= Fx (t)
dt2
(1.1)
となる。
【注】物体の運動を記述するとき,その大きさが無視できる場合,その物体を 質点
¤
¡¨
¥¨
¥
£佐本 3.1.1 ¢ §戸田 p.25 ¦§高木 I p.2 ¦
【注】運動方程式
(質量を持った点) と呼ぶ。
Fx (t)
x(t)
d
m 2 y(t) = Fy (t)
dt
Fz (t)
z(t)
2
(1.2)
で,y(t) = 0 , z(t) = 0,Fy (t) = 0 , Fz (t) = 0 の場合を考えている。
簡単な力に対しては,運動方程式の解を式で表すことができる。
1.1
調和振動におけるエネルギー
・ 調和振動 (単振動)
:フックの法則に従う復元力がはたらく質点の運動
ばねの一端を固定し,他端に質量 m の物体をつないで摩擦のない水
平な面上に置く。ばねの伸び (縮み) が小さい時は,ばねによる力の
大きさはばねの伸び (縮み) に比例する (フック (Hooke) の法則)。
ばねの力がちょうど 0 になるときの物体の位置 (つりあいの位置) を
~
原点とし,ばねの伸びる向きを x 軸の正の向きにとる。ばねの力 F
~ = (Fx , 0 , 0))
は x 軸に平行であり (F
¥
¥
¥
¨
¨
¨
佐本 (4.33) 戸田 (3.25) 高木 I (4.1)
§
¦
§
¦
§
¦
Fx (t) = −kx(t)
となる。k は ばね定数
(1.3)
と呼ばれるばねに固有の正の定数である。
ばねの力のように,物体をつりあいの位置 (x = 0) に引き戻そうと
¤
¡¤
¡
£佐本 図 4.5 ¢ £戸田 図 3.4 ¢
x は,ばねの自然長からの伸び (x > 0 の場合),
する力を 復元力
と呼ぶ。運動方程式 (1.1) は
d2 x(t)
= −ω 2 x(t) ,
dt2
√
ω=
k
m
または縮み (x < 0 の場合) を表す。
となる。ω を 角振動数
と呼ぶ。
¥
¥
¨
¨
佐本 (4.35) 戸田 (3.26)
(1.4)
§
¦
§
¦
dx(t)
dt
d2 x(t)
dt2
= αx(t) の一般解は x(t) = Aeαt
= −ω 2 x(t) の一般解は x(t) = A cos(ωt) + B sin(ωt)
¯
dx(t) ¯¯
= v0
dt ¯t=0
【問】t = 0 での初期条件
.
x(0) = x0 ,
力学.2
(1.5)
¯
dx(t) ¯¯
dx(t)
を満たす運動方程式 (1.4) の解を求めなさい。(
は
に t = 0 を代入するという意味。)
¯
dt t=0
dt
【答】
x(t) = x0 cos(ωt) +
【問】調和振動で次の量
m
E=
2
が 保存する
v0
sin(ωt) .
ω
(
dx(t)
dt
)2
+
¨
¥
¨
¥
¨
¥
佐本 (4.39) 戸田 (3.39) 高木 I (4.7)
§
¦
§
¦
§
¦
(1.6)
¨
¥
戸田 (3.73)
§
¦
(1.7)
k
x(t)2
2
(時間によらず一定になる) ことを示しなさい。ここで,
K(t) =
m
vx (t)2 ,
2
は時刻 t の, 運動エネルギー
dx(t)
dt
vx (t) =
(1.8)
,
U (t) =
k
x(t)2
2
¨
¥
¨
¥
¨
¥
佐本 (5.17) 戸田 (3.71) 高木 I (5.15)
§
¦
§
¦
§
¦
は,時刻 t の,ばねの力による 位置エネルギー
また,
,E = K + U は 力学的エネルギー
力学的エネルギーが保存する
¨
¥
¨
¥
¨
¥
戸田 (3.62) 高木 I (5.24)
§佐本 p.77 ¦
§
¦
§
¦
または ポテンシャルエネルギー
(1.9)
と呼ばれる。
と呼ばれる。力学的エネルギーが運動の過程で一定になることを,
という。
【答】
(1.7) に (1.6) を代入すると
E=
)2 k (
)2
m(
v0
m
k
− x0 ω sin(ωt) + v0 cos(ωt) +
x0 cos(ωt) +
sin(ωt) = v02 + x20
2
2
ω
2
2
(1.10)
となり,E = 一定 であることがわかる。
実は,力学的エネルギーが保存することは,運動方程式の解 (1.6) を使わなくても,運動方程式 (1.4) だけから
示すことができる:運動エネルギーの時間変化は
dK(t)
m d
dvx (t)
=
vx (t)2 = mvx (t)
= −kvx (t)x(t)
dt
2 dt
dt
(1.11)
となる。最後の等式で運動方程式 (1.4) を用いた。一方,位置エネルギーの時間変化は
k d
dx(t)
dU (t)
=
x(t)2 = kx(t)
= kx(t)vx (t)
dt
2 dt
dt
なので,
dK(t)
dU (t)
=−
より
dt
dt
(1.12)
)
d(
K(t) + U (t) = 0
(1.13)
dt
が得られる。この式は K(t) + U (t) の t に対する変化率が常に 0,つまり K(t) + U (t) が一定であることを意味
する。
sin(α + β) = sin(α) cos(β) + cos(α) sin(β),cos(α + β) = cos(α) cos(β) − sin(α) sin(β)
力学.3
【問】
.
初期条件
(1.5) を満たす物体が x 軸上のどの範囲を運動するかを求めなさい。
【答】力学的エネルギー保存則を書き換えると
E−
m
k
x(t)2 = vx (t)2
2
2
(1.14)
k
x(t)2 ≥ 0
2
(1.15)
となるが,この式の右辺は負にならないので,
E−
より
√
−
2E
≤ x(t) ≤
k
√
2E
k
(1.16)
√
m 2 k 2
v2
という不等式が運動の過程で常に成り立っている。初期条件より E = v0 + x0 なので,この物体は − x20 + 02
2
2
ω
√
2
v
から x20 + 02 の範囲を運動することがわかる。
ω
√
a=
vx = 0
x20 +
v02
ω2
¤
¡
佐本 図 5.2
¤£
¡¢
戸田 図 3.9
£
¢
vx = 0
vx = ᦨᄢ
解 (1.6) をは次の形,
v0
= x0 cos(ωt) +
sin(ωt) = a sin(ωt + δ)
ω
√
v0
x0
, cos(δ) =
,
a =
x20 + v02 /ω 2 , sin(δ) =
a
aω
x(t)
(1.17)
(1.18)
に書き換えることができるので,確かに物体が (1.16) の領域を全て運動することがわかる。
【注】一般には,力学的エネルギー保存則から得られる不等式 (1.16) を満たす領域の全てを物体が運動するとは限
らない:
(物体が運動する領域) ⊂ (力学的エネルギー保存則から得られる領域) .
しかし,この場合は (1.17) からわかるように物体は領域 (1.16) を全て運動する。
(1.19)
力学.4
1.2
自由落下におけるエネルギー
力学的エネルギーは他の運動でも保存する。
¨
¥¨
¥
佐本 2,2
高木 I §2.3
§
¦§
¦
重力のみが働く落下運動を考える。x 軸を鉛直上向きにとると,運動方程式は
・ 自由落下
m
d2 x(t)
= −mg
dt2
(1.20)
となる。g は重力加速度の大きさを表す。重力による位置エネルギーを
U = mgx
とすると,力学的エネルギー
E =K +U =
¨
¥
¨
¥
高木 I (5.13) 戸田 (3.64)
§
¦
§
¦
(1.21)
m
vx (t)2 + mgx(t)
2
(1.22)
が保存する。
【問】力学的エネルギー (1.22) が保存することを,運動方程式 (1.20) から示しなさい。
【答】運動エネルギーの時間変化は
dK(t)
m d
dvx (t)
=
vx (t)2 = mvx (t)
= −mgvx (t)
dt
2 dt
dt
(1.23)
となる。最後の等式で運動方程式 (1.20) を用いた。一方,位置エネルギーの時間変化は
dU (t)
d
= mg x(t) = mgvx (t)
dt
dt
なので,
(1.24)
dK(t)
dU (t)
=−
より
dt
dt
)
d(
K(t) + U (t) = 0
dt
が得られる。この式は K(t) + U (t) が一定であることを意味する。
(1.25)
【問】位置 x = 0 から,初速度の大きさ v0 で質量 m の物体を鉛直上向きに投げ上げた。物体の到達する最大
の高さを求めなさい。
【答】物体は
m
vx (t)2 = E − mgx(t)
2
が非負の範囲を運動する。初期条件より力学的エネルギーは
E=
なので,物体の運動する範囲は
となる。従って,物体の到達する最高点 xm
m 2
v
2 0
m 2
v − mgx(t) ≥ 0
2 0
は
xm =
となる。
v02
2g
(1.26)
(1.27)
(1.28)
(1.29)
力学.5
1.3
1 次元の運動における位置エネルギー
運動エネルギーの形は常に
m 2
v だが,位置エネルギーの形は働く力によって異なる。
2 x
物体に働く力 (の x 成分) が,物体の位置 (x) の関数である場合,つまり
Fx (t) = Fx (x(t))
(1.30)
である場合,位置エネルギー U (x) を,等式
−
¨
¥
¨
¥
¨
¥
佐本 (5.12) 高木 I (5.35) 戸田 (3.60)
§
¦
§
¦
§
¦
dU (x)
= Fx (x)
dx
(1.31)
を満たす関数とする。このとき,力学的エネルギー E = K + U は保存する:
m
vx (t)2 + U (x(t)) = 時間に依らず一定 .
2
U (x) は 力のポテンシャル
¨
¥
¨
¥
佐本 (5.14) 戸田 (3.64)
§
¦
§
¦
(1.32)
とも呼ばれる。
【問】1 次元の運動の力学的エネルギー保存則 (1.32) を,位置エネルギーの定義 (1.31) と運動方程式 (1.1) から示
しなさい。
【答】運動エネルギーの時間変化は
dK(t)
m d
dvx (t)
=
vx (t)2 = mvx (t)
= vx (t)Fx (x(t))
dt
2 dt
dt
(1.33)
となる。最後の等式では,運動方程式 (1.1) と,力が x を通して時刻 t に依存すること (1.30),を用いた。一方,
位置エネルギーの時間変化は
¯
dU (x(t))
dU (x) ¯¯
dx(t)
=
= −Fx (x(t))vx (t)
¯
dt
dx x=x(t) dt
となる。最後の等式で,(1.31) を用いた。
dK(t)
dU (t)
=−
より
dt
dt
)
d(
K(t) + U (t) = 0
dt
(1.34)
(1.35)
が得られる。この式は K(t) + U (t) が一定であることを意味する。
U (x) は (1.31) の積分
∫
x
U (x) = −
Fx (x0 )dx0
x0
¨
¥
¨
¥
佐本 (5.14) 戸田 (3.64)
§
¦
§
¦
(1.36)
によって得られる。ただし,(1.36) では U (x0 ) = 0 となるように位置エネルギーの基準点を選んだ。
【注】U (x) に定数を加えても (1.31) を満たすので,位置エネルギーには定数だけの不定性がある。
【問】位置 x の物体に働く力 (の x 成分) が
Fx (x) = −4x3 + 4x
(1.37)
となる場合の,力のポテンシャル U (x) を求めなさい。ただし,x = 1 を位置エネルギーの基準点 U (1) = 0
とする。
力学.6
【答】(1.36) より
∫
x
(
U (x) =
1
)
[
]x0 =x
4(x0 )3 − 4x0 dx0 = (x0 )4 − 2(x0 )2 x0 =1 = x4 − 2x2 + 1 .
(1.38)
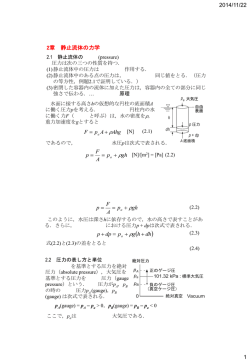
【問】
x 軸上を力 (1.37) を受けて運動する質量 m の物体
を考える。時刻 t = 0 での初期条件が
x(0) = 1 ,
vx (0) = v0
U (x )
(1.39)
A
B
2
E >1
である場合,物体は x 軸上のどの範囲を運動する
かを答えなさい。
D
C
-2
1
-1
E
F
1
E <1
2
x
【答】
力学的エネルギー E
E=
が保存するので,任意の時刻 t で
m
m 2
v + U (1) = v02
2 0
2
m
vx (t)2 + U (x(t)) = E
2
(1.40)
(1.41)
が成り立つ。
運動エネルギーは負にならないので,物体が運動できるのは,不等式
U (x) ≤ E
(1.42)
を満たす領域となる。
(1.42) で決まる領域の端点では運動エネルギーが 0,すなわち,物体の速度が 0 となり,物体は折り返す。この
位置は
U (x) = E
(1.43)
x4 − 2x2 + 1 = (x2 − 1)2 = E
(1.44)
√
√
x=± 1+ E
(1.45)
より求めることができる;
より,E > 1 の場合は
となる (図の点 A,B)。また,0 ≤ E < 1 の場合は
√
√
x=± 1+ E,
√
√
± 1− E
となる (図の点 C,D,E,F)。従って,物体の運動する範囲は
√
√
√
√
m 2
− 1+ E ≤x≤ 1+ E
E = v0 > 1 の場合 ,
2
√
√
√
√
m
E = v02 < 1 の場合 ,
1− E ≤x≤ 1+ E
2
となる。
(1.46)
(1.47)
(1.48)
力学.7
m 2
v < 1 の場合に,点 C と点 D の間の領域は,不等式 (1.42) を満たし,エネルギー的には運動が
2 0
可能。しかし,出発点 x = 1 から CD の領域に到達するには点 D と点 E の間の領域を通らなければなら
ないので,実際にはこの領域には物体は到達できない。
【注】E =
【注】力は U (x) が減少する向きにはたらく。
1.4
力学的エネルギーが保存しない場合の例
【問】力のポテンシャル U (x) から導かれる力 Fx (x) = −dU (x)/dx に加えて,速度の大きさに比例する空気
抵抗
¨
¥
¨
¥
¨
¥
佐本 (8.1)) 高木 I (3.12) 戸田 p.55
§
¦
§
¦
§
¦
Fx0 = −bvx
が働く場合に,力学的エネルギー E =
決まる正の定数である。
(1.49)
m
vx (t)2 + U (x(t)) が減少することを示しなさい。b は物体の形によって
2
【答】運動方程式は
dvx (t)
= Fx (x(t)) − bvx (t)
dt
となる。力学的エネルギーの時間変化を計算する:
m
dE
dt
¯
m d
dU (x(t))
dvx (t)
dU (x) ¯¯
dx(t)
vx (t)2 +
= mvx (t)
+
2 dt
dt
dt
dx ¯x=x(t) dt
(
)
= vx (t) Fx (x(t)) − bvx (t) − Fx (x(t))vx (t) = −bvx (t)2 .
(1.50)
=
(1.51)
従って,物体が運動している限り (vx 6= 0),力学的エネルギーは減少する。
【問】x 軸上の位置 x を速度 (の x 成分) vx で運動している物体にはたらく力 (の x 成分) が
Fx = −4x3 + 4x − bvx
(1.52)
であるとする。時刻 t = 0 での初期条件が
x(0) = 1 ,
ただし,
vx (0) = v0
m 2
v <1
2 0
(1.53)
である場合,時間か十分経過した後の物体の位置 xe = lim x(t) を求めなさい。
t→∞
【答】時刻 t の力学的エネルギーを E(t) とする。
E(t) − U (x(t)) =
より,時刻 t で物体は領域
m
vx (t)2 ≥ 0
2
(1.54)
力学.8
U (x(t)) ≤ E(t)
(1.55)
の中に存在することがわかる。t とともに E(t) は減少するので,物体の存在できる領域の範囲は狭まり,物体は
位置エネルギー U (x) が極小となる位置に近づいていく。E(0) < 1 より,時刻 t = 0 で物体の運動できる領域内
に U (x) の極小は1つしかないので,xe = 1 であることがわかる。尚,E(0) > 1 の場合は,時刻 t = 0 で物体の
運動できる領域内に U (x) の極小が2つ (x = ±1) あるので,時間の経過とともに物体がどちらの極小に近づくか
はエネルギーの考察だけからはわからない。
(参考)空気抵抗や摩擦力が働く場合には,力学的エネルギーは保存しないが,熱エネルギーまで含めて考えると
¨
¥
¨
¥
エネルギー保存則が成り立っている。 佐本 p.96 高木 I (5.33)
§
¦
§
¦
1.5
1 次元の運動における仕事
質量 m の質点が力 Fx (t) を受けて x 軸上を運動しているとする。運動エネルギー K =
m
vx (t)2 の時間変化は
2
dK
dvx (t)
= mvx (t)
= Fx (t) vx (t)
dt
dt
(1.56)
なので,時刻 t = t1 から t = t2 までの運動エネルギーの変化は
∫ t2
K(t2 ) − K(t1 ) =
Fx (t) vx (t)dt
(1.57)
t1
となる。(1.57) の右辺
∫
t2
W =
Fx (t) vx (t)dt
t1
を時刻 t = t1 から t = t2 までの間に 質点に力 Fx がした 仕事
K(t2 ) − K(t1 ) =
(質点の運動エネルギーの変化) =
¥
¨
佐本 (5.26)’
§
¦
(1.58)
という。つまり,
W
(質点になされた仕事)
¨
¥
佐本 (5.31)
§
¦
が成り立つ。後に,(2.39) で説明するように,この関係式は 3 次元の運動においても成り立つ。
(1.59)
0
1 0
1 0
1
Ax
Bx
Ay Bz − Az By
@ Ay A × @ By A = @ Az Bx − Ax Bz A
Az
Bz
Ax By − Ay Bx
力学.9
.
3 次元の運動とエネルギー
2
¨
§佐本 Lec.
6,7
¥¤
¡¨
¥
戸田 3-5
高木 I p.92
£
¢
¦
§
¦
質量 m の質点の運動方程式は
F
(t)
x(t)
x
d2
m 2 y(t) = Fy (t)
dt
Fz (t)
z(t)
(2.1)
(
)
~ (t) = Fx (t), Fy (t), Fz (t) は時刻 t に物体にはたらく力を表す。
となる。F
2.1
3 次元の運動における位置エネルギー
位置 ~r = (x, y, z) にある物体にはたらく力が物体の位置の関数である場合,つまり
F~ (t) = F~ (~r(t))
(2.2)
である場合を考える。3つの関数 Fx (~r),Fy (~r),Fz (~r) が1つの関数 U (~r) から次式
Fx (~r) = −
∂U (~r)
,
∂x
Fy (~r) = −
∂U (~r)
,
∂y
Fz (~r) = −
∂U (~r)
∂z
¨
¨
¨
¥
¥
¥
佐本 (7.1) 高木 I (5.38) 戸田 (3.153) (2.3)
§
¦
§
¦
§
¦
によって導かれるとき,U (~r) を位置エネルギーあるいは力のポテンシャルと呼び,力学的エネルギー
E=
m
|~v (t)|2 + U (~r(t))
2
(2.4)
は保存する。(運動の過程で一定の値をとる。) 関係式 (2.3) を満たす U が存在するような力を 保存力 と呼ぶ。
(
)
∂ ∂ ∂
~
【注】ベクトルの形をした微分演算子 (ナブラ演算子) ∇ =
,
,
を用いると,(2.3) は次のように書ける:
∂x ∂y ∂z
~ (~r) .
F~ (~r) = −∇U
(2.5)
~ (~r) は U (~r) の勾配 (gradient) と呼ばれ,grad U (~r) とも書かれる。
∇U
~ が位置 ~r の関数であっても,いつでも保存力になるわけではない。
【注】力 F
~ (~r) が保存力である (力のポテンシャルを持つ) ための必要十分条件は
位置 ~r の関数である力 F
∂Fy (~r)
∂Fx (~r)
=
,
∂y
∂x
∂Fy (~r)
∂Fz (~r)
=
,
∂z
∂y
∂Fz (~r)
∂Fx (~r)
=
∂x
∂z
¨
¥
佐本 (7.25)
§
¦
(2.6)
である。
~ を用いると,条件 (2.6) は
【注】∇
~ × F~ (~r) = ~0
∇
(2.7)
~ × F~ (~r) は F~ (~r) の回転 (rotation) と呼ばれ,rot F~ (~r) とも書かれる。
と書ける。∇
【問】位置の関数である力が
α
F~ (~r) = 3 ~r
r
であるとき,力のポテンシャルを求めなさい。ただし,α は定数,r = |~r| である。
(2.8)
力学.10
【答】(2.3) を積分する。まず,
∂U
x
= −α 3 を x について積分する:
∂x
r
∫
x
U = −α
dx .
r3
(2.9)
(
)1/2
積分変数を x から r = x2 + y 2 + z 2
に変換しよう。
¯
¯
( )
)1/2
∂r
∂ ( 2
ds1/2 ¯¯
∂(x2 + y 2 + z 2 )
1 −1/2 ¯¯
x
=
x + y2 + z2
=
s
=
2x =
¯
¯
∂x
∂x
ds s=x2 +y2 +z2
∂x
2
r
s=x2 +y 2 +z 2
∫
より,
U = −α
x 1
dr = −α
∂r
r3 ∂x
∫
r−2 dr = αr−1 + C1 (y, z)
(2.10)
(2.11)
が得られる。ここで,C1 (y, z) は x の積分に対する積分定数なので,y や z の関数である可能性がある。次に,上
y
∂U
= −α 3 の左辺に代入する:
式を
∂y
r
∂U
∂r−1
∂C1 (y, z)
∂r
∂C1 (y, z)
y
∂C1 (y, z)
=α
+
= −αr−2
+
= −α 3 +
.
∂y
∂y
∂y
∂y
∂y
r
∂y
ここで,
(2.12)
∂r
y
= を用いた。これより,C1 (y, z) が満たすべき条件
∂y
r
∂C1 (y, z)
=0
∂y
(2.13)
が得られる。この式を y について積分して
∫
C1 (y, z) =
0 dy = C2 (z)
(2.14)
が得られる。C2 (z) は y の積分に対する積分定数なので,z の関数である可能性がある。さらに,得られた結果
∂U
z
U = αr−1 + C2 (z) を
= −α 3 の左辺に代入すると
∂z
r
∂U
∂r−1
∂C2 (z)
∂r
∂C2 (z)
z
∂C2 (z)
=α
+
= −αr−2
+
= −α 3 +
∂z
∂z
∂z
∂z
∂z
r
∂z
となる。ここで,
のポテンシャルは
(2.15)
∂r
z
∂C2 (z)
= を用いた。従って
= 0,つまり C2 は定数になることがわかる。以上より,力
∂z
r
∂z
U (~r) =
α
+C
r
(2.16)
となる.(C は定数。)
(参考)
α = −Gm1 m2 の場合,(2.8) は,原点に固定された質量 m2 [kg] の物体が,位置 ~
r にある質量 m1 [kg] の物体に及ぼす 重力
( 万有引力
) を表す。G は 万有引力定数
で以下の値を持つ:
G = 6.67 · · · × 10−11 m3 /(s2 kg) .
¨
¥
¨
¥¨
¥
佐本 (10.2) 高木 I (5.7) , 戸田 (4.50)
§
¦
§
¦§
¦
(2.17)
q1 q2
の場合,(2.8) は,原点に固定された電荷 q2 [C] を持つ物体が,位置 ~
r にある電荷 q1 [C] を持つ物体に及ぼ
4πε0
す クーロン力
を表す。ε0 は 真空の誘電率
で以下の値を持つ:
また,α =
ε0 = 8.85 · · · × 10−12 C2 kg−1 m−3 s2 ,
C (クーロン) は電荷の単位。
(2.18)
力学.11
¨
¥¨
¥¨
¥
§佐本 p.136 ¦ §高木 I (6.1) ¦§戸田 (3.144) ¦
位置の関数である力が
(
)1/2
~r
F~ (~r) = f (r) , r = x2 + y 2 + z 2
r
【注】中心力
で与えられるとき,力は常に原点 (中心) の方向を向いている。このような力を 中心力
(2.19)
と呼ぶ。力のポテ
ンシャルは
U (r) = −g(r) ,
ただし g(r) は
dg(r)
= f (r) を満たす関数 ,
dr
(2.20)
となる。
¨
¥
【問】 佐本 p.103
§
¦
以下に与えられる力が保存力かどうかを判定しなさい。また,保存力の場合は力のポテンシャルを求めなさい。
(
)
(1)
F~ (~r) = ayz , azx , axy , a は定数
(2.21)
(
)
(2)
F~ (~r) = ky , −kx , 0 , k は定数
(2.22)
【答】
(1)
(
~ × F~ (~r)
∇
∂(axy) ∂(azx) ∂(ayz) ∂(axy) ∂(azx) ∂(ayz)
=
−
,
−
,
−
∂y
∂z
∂z
∂x
∂x
∂y
= (ax − ax , ay − ay , az − az) = ~0
)
(2.23)
となるので,この力は保存力である。
∂U
= −ayz を x について積分する:
∂x
∫
U = −a yzdx = −axyz + C1 (y, z)
次に,力のポテンシャルを求める。まず,
(2.24)
が得られる。ここで,C1 (y, z) は x の積分に対する積分定数なので,y や z の関数である可能性がある。次
∂U
に,上式を
= −azx の左辺に代入する:
∂y
∂U
∂C1 (y, z)
= −axz +
.
∂y
∂y
(2.25)
∂C1 (y, z)
=0
∂y
(2.26)
これより,C1 (y, z) が満たすべき条件
が得られる。この式を y について積分して
∫
C1 (y, z) =
0 dy = C2 (z)
(2.27)
が得られる。C2 (z) は y の積分に対する積分定数なので,z の関数である可能性がある。さらに,得られた
∂U
結果 U = axyz + C2 (z) を
= −axy の左辺に代入すると
∂z
力学.12
∂U
∂C2 (z)
= −axy +
∂z
∂z
より,
(2.28)
∂C2 (z)
= 0,つまり C2 は定数になることがわかる。以上より,力のポテンシャルは
∂z
U (~r) = −axyz + C
(2.29)
となる.(C は定数。)
(2)
(
~ × F~ (~r) =
∇
∂0 ∂(−kx) ∂(ky) ∂0 ∂(−kx) ∂(ky)
−
,
−
,
−
∂y
∂z
∂z
∂x
∂x
∂y
)
= (0 , 0 , −2k) 6= ~0
(2.30)
となるので,この力は保存力ではない。
保存力ではないので,力のポテンシャルは存在しないが,無理に (1) と同じように積分してみる。まず,
∂U
= −ky を x について積分する:
∂x
∫
U = −k ydx = −kxy + C1 (y, z)
(2.31)
が得られる。次に,上式を
∂U
= kx の左辺に代入する:
∂y
∂U
∂C1 (y, z)
= −kx +
.
∂y
∂y
(2.32)
∂C1 (y, z)
= 2kx
∂y
(2.33)
これより,C1 (y, z) が満たすべき条件は
~ (~r) = −∇U
~ (~r)
となるが,C1 (y, z) は y と z の関数なので,この等式を満たすことはできない。従って,F
となる U は確かに存在しない。
保存力のはたらく物体の力学的エネルギーが一定になることは 1 次元の運動と同様に示すことができる:
dK(t)
d m
d~v (t)
~ (~r)|~r=~r(t)
=
|~v (t)|2 = m~v (t) ·
= ~v (t) · F~ (~r(t)) = −~v (t) · ∇U
dt
dt 2
dt
dU (~r(t))
~ (~r)|~r=~r(t) · d~r(t)
= ∇U
dt
dt
(
)
d
d
より, E =
K(t) + U (t) = 0 となることがわかる。
dt
dt
(2.34)
(2.35)
質点が保存力を受けて運動する場合,力学的エネルギー
E=
は保存する。(運動の過程で値が一定となる。)
m
|~v (t)|2 + U (~r(t))
2
(2.36)
力学.13
運動エネルギーは負にならないので,保存力のはたらく,質点が運動できるのは,不等式
U (~r) ≤ E
を満たす領域の内部となる。ただし,E は質点の持つ力学的エネルギーである。
(2.37)
~ (~r) の関係
【注】U (~r) と ∇U
力学.14
~ (~r) は U (~r) = 一定 の面 (等ポテンシャル面) に直交する。
(1) ∇U
.
~ (~r) は U (~r) が最も急激に増加する向きを向いている。
(2)
∇U
つまり,
保存力は力のポテンシャル (位置エネルギー) が一定の面に垂直で,ポテンシャルが最も急激に減少する向きに
はたらく。
2.2
3 次元の運動における仕事
¨
¥¤
¡¨
¥
§佐本 §6 ¦ £戸田 3-8 ¢ §高木 I §5.1, 5.2 ¦
~ (t) を受けて運動しているとする。運動エネルギー K = m |~v |2 の時間変化は
質量 m の質点が力 F
2
¨
¨
¥
¥
dK
d~v (t)
= m~v (t) ·
= F~ (t) · ~v (t)
佐本 (6.20) 戸田 (3.139)
§
¦
§
¦
dt
dt
なので,時刻 t = t1 から t = t2 までの運動エネルギーの変化は
∫ t2
K(t2 ) − K(t1 ) =
F~ (t) · ~v (t)dt
(2.38)
(2.39)
t1
となる。(2.39) の右辺
∫
t2
W =
F~ (t) · ~v (t)dt
t1
¥
¥
¥
¨
¨
¨
佐本 (6.22) 高木 I (5.4) 戸田 (3.130)
§
¦
§
¦
§
¦
~ がした 仕事
を時刻 t = t1 から t = t2 までの間に 質点に力 F
K(t2 ) − K(t1 ) =
(質点の運動エネルギーの変化) =
が成り立つ。
(2.40)
という。つまり,
W
(質点になされた仕事)
¨
¥
佐本 (6.24)
§
¦
(2.41)
力学.15
・仕事の単位 (エネルギーの単位と同じ)
・ 仕事率
[J] = [N · m] = [kg · m2 /s2 ]
:単位時間あたりになされる仕事のこと。
dW
= F~ · ~v .
dt
単位はワット [W]=[J/s]
¨
¥
¨
¥
佐本 (5.33) 高木 I (5.9)
§
¦
§
¦
(2.42)
~ が一定の場合の仕事
・力 F
∫
W = F~ ·
t2
t1
[
]t=t2
(
)
d~r(t)
dt = F~ · ~r(t)
= F~ · ~r(t2 ) − ~r(t1 )
dt
t=t1
(2.43)
より
¨
¥
¨
¥
¨
¥
佐本 (6.1) 高木 I (5.2) 戸田 (3.121)
§
¦
§
¦
§
¦
W = |F~ ||∆~r| cos(θ)
となる。ただし,∆~r = ~r(t2 ) − ~r(t1 ) は 変位ベクトル
(2.44)
である。つまり,この
場合の仕事は
(仕事) =
=
(物体の移動方向の力の成分) × (物体の移動距離)
(力の大きさ) × (力の方向の物体の移動距離)
(2.45)
となる。
(参考) 力が位置の関数 F~ (~r) である場合,(2.40) は時刻 t1 での質点の位置 ~r1 = ~r(t1 ) から時刻 t2 での質点の位置 ~r2 = ~r(t2 )
~ (~r) の線積分となる:
までを質点の軌道に沿って結んだ経路についての F
W =
Z
t2
~ (~r(t)) · ~v (t)dt =
F
Z
t1
t2
t1
~ (~r(t)) · d~r(t) dt =
F
dt
Z
~
r2
~ (~r) · d~r .
F
(2.46)
~
r1
~ = −∇U
~ ),力が行う仕事は ~r1 から ~r2 を結ぶ経路によらず一定になる:
力が保存力の場合 (F
W =
Z
~
r2
~ (~r) · d~r = −
F
~
r1
Z
~
r2
~ (~r) · d~r = U (~r1 ) − U (~r2 ) .
∇U
(2.47)
~
r1
(2.39) と (2.47 ) より,力学的エネルギー保存則
K(t1 ) + U (~r(t1 )) = K(t2 ) + U (~r(t2 ))
(2.48)
が得られる。
~ (~r) の線積分 (2.47) を用い
また,~
r1 を位置エネルギー (力のポテンシャル) の基準点,~r2 を任意の位置と考えて,F
て,U (~
r) を計算することができる。
例えば,(2.8) の場合は ~
r = (x, y, z) と無限遠を結ぶ直線 ~r(s) = (sx, sy, sz); 1 ≤ s < ∞ に沿った線積分より
U (~r)
Z ∞
Z
~
α
α ∞ 1
~ (~r(s)) · dr(s) ds =
F
(x,
y,
z)
·
(x,
y,
z)ds
=
ds
ds
r3 s2
r 1 s2
1
»∞ –s=∞
1
α
α
−
=
r
s s=1
r
−
=
=
Z
1
(2.49)
が得られる。また,(2.21) の場合は原点と ~
r = (x, y, z) を結ぶ直線 ~r(s) = (sx, sy, sz); 0 ≤ s ≤ 1 に沿った線積分より
U (~r) − U (~0)
=
=
Z 1“
Z 1
”
~
~ (~r(s)) · dr(s) ds = −
F
ayzs2 , azxs2 , axys2 · (x, y, z)ds = −
3axyzs2 ds
ds
0
0
0
h is=1
−axyz s3
= −axyz
(2.50)
−
Z
1
s=0
となる。
0
1 0
1 0
1
Ax
Bx
Ay Bz − Az By
@ Ay A × @ By A = @ Az Bx − Ax Bz A
Az
Bz
Ax By − Ay Bx
3
.
d sin(ωt)
= ω cos(ωt) ,
dt
d cos(ωt)
= −ω sin(ωt)
dt
力学.16
力のモーメントと角運動量
¨
¥¨
¥¨
¥
佐本 §11
高木 I §6
戸田 §5
§
¦§
¦§
¦
中心力 (2.19) がはたらく質点の運動では力学的エネルギーに加えて角運動量が保存する。
3.1
質点の角運動量
質量 m の質点の基準点 O に対する位置ベクトルを ~r(t) とする。
d~r(t)
~
L(t)
= ~r(t) × p~(t) = m~r(t) ×
dt
を質点の 点 O に関する 角運動量
という。p
~ = m~v = m
¥
¥
¥
¨
¨
¨
佐本 (11.25) 高木 I (6.14) 戸田 ((5.26)
§
¦
§
¦
§
¦
d~r
は質点の 運動量
dt
(3.1)
。
角運動量が質点が,点 O のまわりにどのように回転しているかを表すベクトル。
~ の大きさ
L
: 回転のはげしさを表す。
~ の向き : 回転軸の向きを表す。
L
【注】基準点 ~r0 に関する角運動量の場合は,位置ベクトル ~r(t) のかわりに ~r(t) − ~r0 を用いるので
(
)
(
) d ~r(t) − ~r0
~
L(t)
= m ~r(t) − ~r0 ×
dt
(3.2)
(3.3)
となる。
【問】質量 m の質点が,x-y 平面内で,原点 O を中心に半径 r,角速度 ω で等速円運動をしている:
(
)
~r(t) = r cos(ωt) , r sin(ωt) , 0
(3.4)
この質点の点 O に関する角運動量を求めなさい。
【答】
~v (t) =
なので,
となる。
)
d~r(t) (
= − rω sin(ωt) , rω cos(ωt) , 0
dt
(
)
~
L(t)
= 0 , 0 , mr2 ω
(3.5)
(3.6)
力学.17
【問】質量 m の質点が,x-y 平面内で,x 軸の正の向きに速さ (速
度ベクトルの大きさ) v で,x 軸から ` 離れた x 軸に平行な直線上
を運動している。この質点の点 O に関する角運動量を求めなさい。
また,点 A:(0 , 2` , 0) に関する角運動量を求めなさい。
【答】質点が時刻 t に y 軸を横切るとすると,質点の位置ベクトルは
(
)
~r(t) = vt , ` , 0 ,
(3.7)
速度ベクトルは
~v (t) =
)
d~r(t) (
= v, 0, 0
dt
(3.8)
~ 0 (t) は
となる。従って,点 O に関する角運動量 L
(
)
~ 0 (t) = 0 , 0 , −m`v
L
(3.9)
(
)
~r(t) − ~r0 = vt , −` , 0
(3.10)
(
)
~ 1 (t) = 0 , 0 , m`v
L
(3.11)
となる。
また,~r0 = (0 , 2` , 0) とすると,
~ 1 (t) は
なので,点 A に関する角運動量 L
となる。
3.2
力のモーメント
角運動量の時間変化を考えよう:
~
d
d~r(t)
d~
p(t)
dL(t)
=
(~r(t) × p~(t)) =
× p~(t) + ~r(t) ×
.
dt
dt
dt
dt
(3.12)
ベクトルの外積 (ベクトル積) の性質より
d~r(t)
d~r(t) d~r(t) ~
× p~(t) = m
×
= 0.
dt
dt
dt
~ (t) とすると,運動方程式は
また,質点にはたらく力を F
~
dL(t)
~ (t)
=N
dt
(3.13)
d~
p(t)
= F~ (t) なので,角運動量の時間変化は
dt
¨
¨
¨
¥
¥
¥
佐本 (11.30) 高木 I (6.16) 戸田 (5.25)
§
¦
§
¦
§
¦
(3.14)
となる。ここで,
~ (t) = ~r(t) × F~ (t)
N
¨
¥
¨
¥
¨
¥
佐本 (11.12) 高木 I (6.13) 戸田 (5.26)
§
¦
§
¦
§
¦
は時刻 t に質点にはたらく 点 O に関する 力のモーメント
,または トルク
(角運動量の時間変化) = (力のモーメント)
という関係が成り立つ。
(3.15)
と呼ばれる。つまり,
(3.16)
力学.18
~ は,物体にはたらく力が物体をどう回転させようとするかを表すベクトルで,|N
~ | が大きい
力のモーメント N
ほど,物体にはたらく力が物体を点 O のまわりに回転させようとする。回転させようとする向きは下図のように
なる:
【問】質点にはたらく力の向きが常にある一点 O を向いており,その大きさが点 O と質点の間の距離のみによっ
¨
¥¨
¥¨
¥
て決まる場合,その力を 中心力 ,点 O を 力の中心 と呼ぶ ( 佐本 p.136 , 高木 I (6.1) , 戸田 (3.144) )。中心
§
¦§
¦§
¦
力が質点にはたらく場合,点 O に関する質点の角運動量が保存する (時間によらず一定となる) ことを示しなさい。
【答】力の中心 O を座標系の原点とする。質点の位置ベクトルを ~r
~ の向きは ~r となる (r = |~r|)。力の大きさは r のみの
とすると,力 F
r
関数なので f (r) と書くと
~r
F~ = f (r)
r
¨
¥
高木 I (6.1)
§
¦
(3.17)
となる。力のモーメントは
~ = ~r × F~ = f (r) ~r × ~r = ~0
N
r
(3.18)
なので,点 O に関する角運動量は時間が経過しても変化せず一定の
値をとることがわかる。
~ が保存する場合を考える。L
~ は位置ベクトル ~r(t) にも速度ベクトル ~v (t) にも直交
原点 O に関する角運動量 L
するので,
~ 6= ~0 が保存する場合,質点は点 O を含む L
~ に直交する平面内を運動する。
点 O に関する角運動量 L
~ = ~0 の場合,~r(t) と ~v (t) は平行となるので,質点は直線上を運動する。
【注】L
質点の運動する平面を x-y 平面とすると,z(t) = 0 , vz (t) = 0 なので,
0
Lx
y vz − z vy
0
(3.19)
Ly = m z vx − x vz =
(
)
m x vy − y vx
Lz
x vy − y v x
y
ᤨ⸘࿁ࠅ
ᤨ⸘࿁ࠅ
となり,角運動量は z 軸方向を向く。z > 0 の方から x-y 平面を見ると,
z
Lz > 0 の場合 : 質点は z 軸のまわりに反時計回りに運動する ,
Lz < 0 の場合 : 質点は z 軸のまわりに時計回りに運動する .
(3.20)
x
力学.19
3.3
極座標系での角運動量
2 次元の 極座標系 (円座標) では,質点の位置を原点からの距離 r と x 軸
¨
¥¨
¥
に対する角度 θ で表す ( 佐本 §1.11.2 , 高木 I p.131 ):
§
¦§
¦
x(t) = r(t) cos(θ(t)) ,
y(t) = r(t) sin(θ(t)) .
y
(3.21)
r
θ
O
x
極座標での速度は
vx (t) =
vy (t) =
d
dr(t)
dθ(t)
(r(t) cos(θ(t))) =
cos(θ(t)) − r(t) sin(θ(t))
,
dt
dt
dt
d
dr(t)
dθ(t)
(r(t) sin(θ(t))) =
sin(θ(t)) + r(t) cos(θ(t))
dt
dt
dt
(3.22)
(3.23)
となるので,極座標で表した角運動量の z 成分は
Lz = m r(t)2
dθ(t)
dt
(3.24)
となる。
(参考)
¨
¥¨
¥
佐本 (10.18) , 高木 I (6.19)
§
¦§
¦
~
1
dθ(t)
|L|
= r(t)2
2m
2
dt
は 面積速度
と呼ばれ,原点 O と質点を結んだ直線 ( 動径
「物理 II」(啓林館)
(3.25)
と呼ばれる) が単位時間に覆う面積を表す。
力学.20
3.4
極座標系での運動エネルギー
極座標での速度の式 (3.23) より,極座標で表した運動エネルギー K は
{(
)2
(
)2 }
m
dr(t)
dθ(t)
2
K=
+ r(t)
2
dt
dt
(3.26)
~ が保存し,質点が L
~ と直交する平面内 (これを x-y 平面とする) を運動する場合,L
~ = (0, 0, Lz ),
となる。角運動量 L
dθ(t)
~ = |Lz | を用いて
なので,運動エネルギーは角運動量の大きさ |L|
Lz = mr(t)2
dt
(
)2
~ 2
|L|
m dr(t)
+
(3.27)
K=
2
dt
2mr(t)2
と表される。
dU (r) ~r
のはたらく質量 m の質点の運動では,力学的
dr r
~ が保存する。式 (3.27) より,力学的エネルギー E は
エネルギー E と角運動量 L
~ (~r) = −
力のポテンシャル U (r) から導かれる中心力 F
E=
m
2
(
dr(t)
dt
)2
+
~ 2
|L|
+ U (r(t))
2mr(t)2
(3.28)
と書けるので,力の中心から質点までの距離 r(t) の動く範囲は,不等式
E≥
~ 2
|L|
+ U (r(t))
2mr(t)2
(3.29)
を満たす領域の内部となる。
(参考) ここでは,関係式 (3.27) を角運動量が保存する場合に導いたが,(3.27) は一般に成り立つ。次の等式
“
” “
” “
”“
” “
”“
”
¨
¥
~×B
~ · C
~ ×D
~ = A
~·C
~ B
~ ·D
~ − A
~·D
~ B
~ ·C
~
A
§戸田 p.141 ¦
より,角運動量の大きさの 2 乗は以下のように表せる:
“
” “
” “
”“
” “
”2
“
”2
~ 2=L
~ ·L
~ = ~r × p
|L|
~ · ~r × p
~ = ~r · ~r p
~·p
~ − ~r · p
~ = r2 |~
p|2 − ~r · p
~ .
ここで,r = |~
r|。また,
~r · p
~ = m~r ·
”
d~r
m d“
m d 2
dr
=
~r · ~r =
r = mr
dt
2 dt
2 dt
dt
より,
~ 2 = r2
|L|
と書ける。K =
(
|~
p| − m
2
2
„
dr
dt
«2 )
(3.30)
(3.31)
(3.32)
(3.33)
1
|~
p|2 なので,(3.27) が得られる:
2m
¨
¥
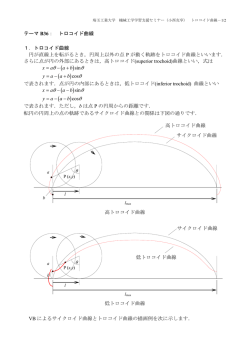
【問】 佐本 p.106 [2]
§
¦
原点 O に固定された質量 M の物体からの万有引力を受けて運動する質量 m の物体の角運動量の大きさが L で
あるとする。全力学的エネルギー E を変えたときの原点 O から質点までの距離 r(t) の動く範囲はどうなるか?
また,r(t) が一定となるのは E がどの値のときか?
力学.21
【答】この場合の位置エネルギーは
U (r) = −G
となる。
E=
m
2
(
dr(t)
dt
)2
+
mM
r
(3.34)
¨
¥
¨
¥
高木 I (6.23)’ 戸田 (4.69)
§
¦
§
¦
~ 2
|L|
mM
−G
2mr(t)2
r(t)
(3.35)
より,r(t) の動く領域は
E ≥ Ueff (r(t))
(3.36)
となる。ここで
a
b
Ueff (r) = − + 2 ,
r
2r
とした。Ueff (r) の 1 次の導関数
a = GmM ,
~ 2
|L|
m
b=
(3.37)
a
b
ar − b
dUeff (r)
= 2− 3 =
dr
r
r
r3
(3.38)
の符号と 0 となる点を表にまとめると
r
···
0
dUeff (r)
dr
∞
Ueff (r)
···
b/a
−
0
&
a2
−
∞
+
2b
%
(3.39)
0
極小
となる。これから Ueff (r) の概形を次のように描くことができる:
bU
a 2 eff
0≤E
D
C
A
a
br
2
−a < E < 0
2b
B
Ueff (r) の概形
¡
¤
戸田 図 4-20
£
¢
これより,E を変えたときの r(t) の動く範囲は次のようになる:
(1) E < −
a2
:この場合,E ≥ Ueff (r) となる r が存在しないので,このような運動は起きない。
2b
a2
b
:原点 O からの距離は一定値 r(t) =
(点 B に対応) となり,質点は円周上を運動する。また,
2b
a
(3.24) より,角速度 dθ(t)/dt も一定となるので,質点は 等速円運動 を行う。
(2) E = −
力学.22
(3) −
a2
< E < 0:dr(t)/dt = 0 となるのは,Ueff (r) = E より,
2b
(
)
√
a
2bE
r± = −
1± 1+ 2
2E
a
(3.40)
となる。原点 O からの距離は r− (点 A に対応) と r+ (点 C に対応) の間を繰り返し往復する。
(4) 0 ≤ E:初期値が dr/dt > 0 である場合,質点の原点 O からの距離は単調に増加して,r(→ ∞ へと遠ざかる。
)
√
a
2bE
初期値が dr/dt < 0 である場合,質点の原点 O からの距離は,まず減少して r− =
1 + 2 − 1 (点
2E
a
D に対応) まで近づく。その後 r は増加に転じ r → ∞ へと遠ざかる。
(参考) 万有引力がはたらく場合の質点の軌道は
r=
¨
¥
¨
¥
高木 I (6.29) 戸田 (4.62)
§
¦
§
¦
`
,
1 + e sin(θ + α)
(3.41)
となる。ここで,
h=
~
|L|
,
m
`=
h2
,
GM
e=
r
1+
2E`2
=
mh2
r
1+
2bE
,
a2
α は積分定数 .
軌道は E < 0 の場合は楕円,E = 0 の場合は放物線,E > 0 の場合は双曲線,となる。
万有引力がはたらく場合の質点の軌道
¨
¥
§高木 I p.135 ¦
(3.42)
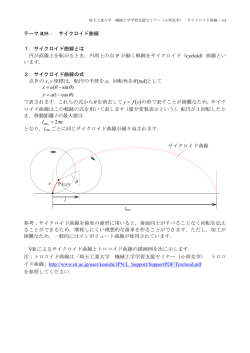
力学.23
なお,軌道が閉曲線になるのは,位置エネルギーが力の中心からの距離に反比例する場合 (力の大きさは距離の
1
2 乗に反比例) に特徴的な結果。下図は U (r) = − 1.1 の場合の軌道。r(t) は有限の範囲を動くが軌道は閉じない。
r
1
0.5
-1
-0.5
0.5
1
-0.5
-1
1
m = 1,U (r) = − 1.1 の場合の軌道。
r
初期条件は x(0) = 1 , y(0) = 0,vx (0) = 0 , vy (0) = 0.5 .
力学.24
いろいろな座標系での運動方程式
4
4.1
直交直線座標系
¨
¥¤
¡ ¨
¥
佐本 §1.12.1
高木 I 付録 B.1
戸田 p.4
¢ §
§
¦£
¦
直交直線座標系では,空間に固定した互いに直交する x,y ,z
軸の正の向きを向く単位ベクトル ~i , ~j , ~k ( 基本ベクトル )
を基底として速度,加速度や力などのベクトルを表す:
~ = Ax~i + Ay~j + Az~k .
A
~ の x,y ,z
Ax ,Ay ,Az をベクトル A
Ax
(4.1)
成分
と呼ぶ。以下,
~=
A
Ay
Az
(4.2)
とベクトルを成分で表す場合,直交直線座標系の基本ベクトル
~i , ~j , ~k に対する成分であるとする。
~i , ~j , ~k は定数のベクトルなので,ベクトルの微分は,各成分を
微分すればよい:
~
dA
dAx ~ dAy ~ dAz ~
i+
j+
=
k.
dt
dt
dt
dt
(4.3)
状況によっては,位置や時間に依存する基底ベクトルを用いる場合があり,そのいくつかの例を紹介する。
4.2
円柱 (円筒) 座標系
円柱座標系
では,点の位置を表す座標として,(x , y)
√
ではなく (r , θ) を用いる。r = x2 + y 2 は点の z 軸ま
での距離,θ は x 軸からの角度を表す。z 座標は直交直線
座標系と同じ。(x , y) と (r , θ) の関係は
x = r cos(θ) ,
y = r sin(θ)
(4.4)
と な る 。な お ,x-y
平面の座標系と考える場
¥
¨
合 は 2 次元極座標系
(§佐本 §1.11.2, 2.5.3 ¦
) と
¨
¥
か 円座標系 ( 高木 I p.131 ) などと呼ばれる。
§
¦
円柱座標系でベクトルを表す場合は,位置に依存する
次の (直交直線座標系での成分表示で表された) 基底ベク
トルを用いる:
cos(θ)
~er = sin(θ) ,
0
− sin(θ)
~eθ = cos(θ) ,
0
¥
¨
高木 I p.2 図 (a) のデカルト座標系とは直交直線座標系のこと。
§
¦
0
~ez = ~k = 0 .
1
¨
¥
佐本 (1.33,34)
§
¦
(4.5)
力学.25
y
~er , ~eθ , ~ez は空間の各点で右手系をなす:
~er × ~eθ = ~ez ,
~eθ × ~ez = ~er ,
~ez × ~er = ~e,θ .
r
eθ
(4.6)
r
また,(4.5) より次の関係式が得られる:
d~er
= ~eθ ,
dθ
O
d~eθ
= −~er .
dθ
(4.7)
z
θ
r
er
x
¤
¡
佐本 図 1.14
£
¢
以下,x-y 平面上での運動を考える。位置ベクトルは次のように書ける:
¨
¥
佐本 (1.30)
§
¦
~r(t) = r(t) ~er (θ(t)) .
(4.8)
速度ベクトルは位置ベクトルの時間微分なので
~v (t) =
d~r(t)
dt
=
=
) dr(t)
d(
d~er dθ(t)
r(t) ~er (θ(t)) =
~er (θ(t)) + r(t)
dt
dt
dθ dt
¨
¥
dr(t)
dθ(t)
~er + r(t)
~eθ
佐本 (2.49)
§
¦
dt
dt
(4.9)
となる。従って,2 次元極座標系での速度の成分を vr ,vθ とすると以下が成り立つ:
~v = vr ~er + vθ ~eθ ,
vr =
dr(t)
,
dt
vθ = r(t)
(4.10)
dθ(t)
.
dt
(4.11)
同様に速度ベクトルの時間微分 (加速度ベクトル) は
~a(t) =
d~v (t)
dt
)
d(
vr (t)~er (θ(t)) + vθ (t)~eθ (θ(t))
dt
dvr (t)
d~er dθ(t) dvθ (t)
d~eθ dθ(t)
=
~er (θ(t)) + vr (t)
+
~eθ (θ(t)) + vθ (t)
dt
dθ dt
( dt
)dθ dt(
)
dvr (t)
dθ(t)
dvθ (t)
dθ(t)
=
− vθ (t)
~er +
+ vr (t)
~eθ
dt
dt
dt
dt
=
(4.12)
となるので,2 次元極座標系での加速度の成分を ar ,aθ とすると以下が成り立つ:
~a = ar ~er + aθ ~eθ ,
ar
=
aθ
=
¥
¨
佐本 (2.53)
§
¦
( )2
dvr
dθ
d2 r
dθ
− vθ
= 2 −r
,
dt
dt
dt
dt
(
)
dvθ
dθ
d2 θ
dr dθ
1 d
2 dθ
+ vr
=r 2 +2
=
r
.
dt
dt
dt
dt dt
r dt
dt
(4.13)
(4.14)
(4.15)
質点の原点 O についての角運動量は
(
)
~ = m~r × ~v = mr~er × vr ~er + vθ ~eθ = mrvθ ~ez = mr2 dθ ~ez
L
dt
となる。
(4.16)
力学.26
~を
質点にはたらく力 F
F~ = Fr ~er + Fθ ~eθ
(4.17)
とすると,運動方程式は
(
m
d2 r
−r
dt2
(
dθ
dt
)2 )
= Fr ,
¥
¨
戸田 (4.24)
§
¦
(4.18)
¨
¥
戸田 (4.25)’
§
¦
dLz
= rFθ
dt
(4.19)
となる。力の中心が原点 O である中心力の場合は,Fθ = 0 なので,角運動量が保存することがわかる。
回転座標系
4.3
¨
¥¨
¥
§高木 I §7.3 ¦§戸田 §8.4 ¦
ω で回転する座標系 x0 y 0 z 0 を考える。座標の間には以下の関係式がある:
z 軸を回転軸として,一定の 角速度
x0 = x cos(ωt) + y sin(ωt) ,
この 回転座標系
y 0 = −x sin(ωt) + y cos(ωt) ,
¨
¥
戸田 (8.71)’
§
¦
z0 = z .
では,時間に依存する次の (止まっている直交直線座標系
~ex0
cos(ωt)
= sin(ωt) ,
0
~ey0
− sin(ωt)
= cos(ωt) ,
0
~ez0
0
= ~k = 0 . (4.21)
1
(4.21) より次の関係式が得られる:
d~ex0
= ω~ey0 ,
dt
y
y′
での成分表示で表された) 基底ベクトルを用いる:
d~ey0
= −ω~ex0 .
dt
(4.20)
x′
r
ey′
r
ex ′
O z = z′
ωt
x
¤
¡¤
¡
£高木 I 図 7.7 ¢ £戸田 図 8-9 ¢
(4.22)
速度ベクトルは位置ベクトルの時間微分なので
)
d~r(t)
d( 0
=
x (t)~ex0 (t) + y 0 (t)~ey0 (t) + z 0 (t)~ez0
dt
dt
dx0 (t)
d~ex0 (t) dy 0 (t)
d~ey0 (t) dz 0 (t)
=
~ex0 (t) + x0 (t)
+
~ey0 (t) + y 0 (t)
+
~ez0
dt ( dt
dt
dt
( dt 0
)
)
dy 0 (t)
dz 0 (t)
dx (t)
− ωy 0 (t) ~ex0 (t) +
+ ωx0 (t) ~ey0 (t) +
~ez0
=
dt
dt
dt
~v (t) =
(4.23)
となる。従って,回転座標系での速度の成分を vx0 ,vy0 ,vz0 とすると以下が成り立つ:
~v = vx0 ~ex0 + vy0 ~ey0 + vz0 ~ez0 ,
0
vx0 =
dx (t)
− ωy 0 (t) ,
dt
(4.24)
0
vy 0 =
dy (t)
+ ωx0 (t) ,
dt
0
vz 0 =
dz (t)
.
dt
(4.25)
同様に,加速度ベクトルの各成分は
~a = ax0 ~ex0 + ay0 ~ey0 + az0 ~ez0 ,
ax0
=
ay0
=
az0
=
dvx0 (t)
d2 x0 (t)
dy 0 (t)
− ωvy0 (t) =
−
2ω
− ω 2 x0 (t) ,
dt
dt2
dt
d2 y 0 (t)
dx0 (t)
dvy0 (t)
+ ωvx0 (t) =
+
2ω
− ω 2 y 0 (t) ,
dt
dt2
dt
dvz0 (t)
d2 z 0 (t)
=
dt
dt2
(4.26)
(4.27)
(4.28)
(4.29)
力学.27
~を
となる。質点にはたらく力 F
F~ = Fx0 ~ex0 + Fy0 ~ey0 + Fz0 ~ez0
(4.30)
と表すと,回転座標系での運動方程式は
d2 x0 (t)
dt2
2 0
d y (t)
m
dt2
d2 z 0 (t)
m
dt2
m
=
=
=
dy 0 (t)
+ mω 2 x0 (t) ,
dt
dx0 (t)
+ mω 2 y 0 (t) ,
Fy0 − 2mω
dt
¨
¥
¨
¥
Fz0
高木 I (7.18,19) 戸田 (8.76)
§
¦
§
¦
Fx0 + 2mω
(4.31)
(4.32)
(4.33)
となる。(4.31),(4.32) の右辺で ω 2 に比例する項
(cf)
Fx0
は 遠心力
= mω 2 x0 (t) ,
(cf)
Fy0
= mω 2 y 0 (t)
¨
¥
高木 I (7.15)
§
¦
(4.34)
と呼ばれる。また,ω に比例する項
(C)
Fx0 = 2mω
は コリオリ (Coriolis) 力
れる 見かけの力
dy 0 (t)
,
dt
(C)
Fy 0
= −2mω
dx0 (t)
dt
¨
¥
¨
¥
高木 I (7.16) 戸田 (8.77)
§
¦
§
¦
(4.35)
と呼ばれる。これらの力は,加速度運動をしている座標系で運動を記述したために現
で,一般的に 慣性力
と呼ばれる。
ω > 0 の場合,コリオリ力は x-y 平面上を運動する物体の進む向きを右側にずらそうとする。コリオリ力は,北
半球で低気圧に吹き込む風が反時計まわりになることや,振り子の振動面が徐々に時計回りに回転する現象 (フー
コー (Foucault) 振り子) などの原因となっている。
喜多秀次 他,“力学” (学術図書)
¨
¥
§戸田 p.225 ¦
¥
¨
§戸田 p.224 ¦
(例) 地球表面近くでの物体の運動
力学.28
¨
¥
戸田 §8-7
§
¦
.
例として,地球表面近くでの物体の運動を記述する方程式を導こう。z 軸を地球の回転軸 (地軸) とし,回転座
標系で,x0 = x00 , y 0 = 0 , z 0 = z00 の付近を表す座標 x
˜ , y˜ , z˜ を考える:
x0 = x00 + x
˜,
y 0 = y˜ ,
z 0 = z00 + z˜ .
(4.36)
この座標系での運動方程式は (4.31)∼ (4.33) より以下となる;
d2 x
˜(t)
dt2
d2 y˜(t)
m
dt2
2
d z˜(t)
m
dt2
m
d˜
y (t)
+ mω 2 x
˜(t) + mω 2 x0 ,
dt
d˜
x(t)
+ mω 2 y˜(t) ,
= Fy0 − 2mω
dt
= Fx0 + 2mω
(4.37)
(4.38)
(4.39)
= Fz 0 .
次に,質点にはたらく力を,x
˜ = y˜ = z˜ = 0 での地球の万有引力 (FxG , 0, FzG ) と,それ以外の部分にわける:
Fx0 = FxG + F˜x0 ,
Fy0 = F˜y0 ,
Fz0 = FzG + F˜z0
(4.40)
x
˜ = y˜ = z˜ = 0 での,地球の万有引力と遠心力の合力である見かけの重力のはたらく向きが,(定義により) ,鉛直
下向きとなる。新たな Z 軸 を鉛直上向きにとる:
X=x
˜ sin λ − z˜ cos λ ,
Y = y˜ ,
Z = z˜ sin λ + x
˜ cos λ .
(4.41)
X 軸は南の向き,Y 軸は東向き,Z 軸は鉛直上向きとなる。また,
FxG + mω 2 x0 = −mg cos λ ,
である。λ は 地理緯度
FzG = −mg sin λ
(4.42)
と呼ばれる。
¥
¨
戸田 p.220
§
¦
以上より,地球表面近くでの運動を記述する方程式は
d2 X(t)
dt2
2
d Y (t)
m
dt2
d2 Z(t)
m
dt2
m
dY (t)
= FX + 2mω sin λ
,
dt
(
)
dX(t)
dZ(t)
= FY − 2mω sin λ
+ cos λ
,
dt
dt
¨
¥
dY (t)
= FZ − mg + 2mω cos λ
戸田 (8.112)
§
¦
dt
(4.43)
(4.44)
(4.45)
となる。ここで
FX = sin λF˜x0 − cos λF˜z0 ,
FY = F˜y0 ,
FZ = cos λF˜x0 + sin λF˜z0
(4.46)
は質点にはたらく見かけの重力 (˜
x = y˜ = z˜ = 0 での万有引力と遠心力の合力) 以外の力の成分を表す。また,
˜(t) mω 2 y˜(t) は無視した。
(4.37),(4.38) の右辺の mω 2 x
eiθ = cos θ + i sin θ
力学.29
(例. ) フーコー振り子の運動
¨
¥
戸田 p.226
§
¦
振り子の運動のように,(近似的に)X-Y 平面上で,原点に向かう復元力が働く場合の運動を考える。(4.43),
(4.44) より
d2 X(t)
dt2
2
d Y (t)
m
dt2
m
dY (t)
,
dt
dX(t)
= −mω02 Y (t) − 2mω 0
,
dt
= −mω02 X(t) + 2mω 0
(4.47)
(4.48)
√
ここで,mω02
は復元力の強さを表すパラメータである。(長さ ` の振り子の場合は ω0 =
ω 0 = ω sin λ とおいた。さらに,
g
となる。) また,
`
dZ(t)
≈ 0 と近似している。
dt
この連立方程式は
という複素変数を用いると
ζ(t) = X(t) + iY (t)
(4.49)
d2 ζ(t)
dζ(t)
= −ω02 ζ(t) − 2iω 0
dt2
dt
(4.50)
と表せる。特解を求めるために解の形を ζ(t) = eiαt と仮定して,(4.50) に代入すると α が満たすべき式
α2 + 2α ω 0 − ω02 = 0
より
α± = −ω 0 ± ω00 ,
ω00 =
(4.51)
√
ω02 + (ω 0 )2
(4.52)
が得られる。
一般解は
(
)
0
ζ(t) = Ceiα+ t + Deiα− t = e−iω t A cos(ω00 t) + B sin(ω00 t) ,
となる。初期条件
X(0) = x0 . Y (0) = 0 ,
A = C + D , B = i(C − D)
¯
dx(t) ¯¯
= v0 ,
dt ¯t=0
¯
dy(t) ¯¯
=0
dt ¯t=0
(4.53)
(4.54)
に対する解は
−iω 0 t
ζ(t) = e
{
(
)
}
(
)
v0
ω0
0
0
−iω 0 t
t)
=
e
x
ˆ
(t)
+
iˆ
y
(t)
x0 cos(ω0 t) +
+
i
x
sin(ω
0
0
ω00
ω00
となる。ここで
x
ˆ(t) = x0 cos(ω00 t) +
(4.55) は
(
X(t)
Y (t)
)
(
=
v0
sin(ω00 t) ,
ω00
yˆ(t) =
cos(ω 0 t) sin(ω 0 t)
− sin(ω 0 t) cos(ω 0 t)
ω0
x0 sin(ω00 t) .
ω00
)(
x
ˆ(t)
yˆ(t)
(4.55)
(4.56)
)
(4.57)
と書けるので,(ˆ
x(t) , yˆ(t)) で表される速い振動が,角速度 ω 0 でゆっくり時計回りに回転することがわかる。
力学.30
4.4
原点が運動する座標系
¨
¥¨
¥
§高木 I §7.2 ¦§戸田 §8-6 ¦
z'
P
r
r (t )
r
j
r
k
y'
r
r '(t ) r
ez '
y
z
r
ey '
O'
x'
r
ex '
r
r0 (t )
x
O r
i
¤
¡
£高木 I 図 7.5 ¢
静止している直交直線座標系 O-xyz (K 系) に対して,原点が運動している直交直線座標系 O’-x0 y 0 z 0 (K’ 系) を
考える。
−−→0
OO = ~r0 (t)
(4.58)
とすると,質点 P の K 系での位置ベクトル ~r(t) と K’ 系での位置ベクトル ~r 0 (t) には
¨
¨
¥
¥
高木 I (7.10) 戸田 (8.99)
§
¦
§
¦
~r(t) = ~r0 (t) + ~r 0 (t)
という関係がある。加速度は
なので,運動方程式 m
d2~r(t)
d2~r0 (t) d2~r 0 (t)
=
+
dt2
dt2
dt2
(4.59)
(4.60)
d2~r(t)
= F~ (t) を K’ 系での位置ベクトル ~r0 (t) で表すと
dt2
m
d2~r 0 (t)
d2~r0 (t)
= F~ (t) − m
2
dt
dt2
¥
¨
高木 I (7.12)
§
¦
(4.61)
d2~r0 (t)
という項が右辺に現れる。この項は加速や減速してい
dt2
る電車内などで感じる見かけの力を表す。加速度運動をしている座標系で物体の運動を記述した際に現れるこの
ような見かけの力を 慣性力 と呼ぶ。
となり,O’ が加速度運動をしている場合には,−m
~ex0 = ~i , ~ey0 = ~j , ~ez0 = ~k
(4.62)
の場合に K’ 系での運動方程式を成分で表すと
d2 x0 (t)
dt2
2 0
d y (t)
m
dt2
2 0
d z (t)
m
dt2
m
d2 x0 (t)
dt2
2
d y0 (t)
= Fy0 (t) − m
dt2
2
d z0 (t)
= Fz0 (t) − m
dt2
= Fx0 (t) − m
(4.63)
(4.64)
(4.65)
となる。ここで,K’ 系の原点 O’ の K 系での座標を ~r0 (t) = (x0 (t) , y0 (t) , z0 (t)) とした。
【注】座標系の基底ベクトルが ~ex0 = ~i,~ey0 = ~j ,~ez0 = ~k と,K 系と K’ 系で一致している場合でも,O’ が加速度
運動をする場合には慣性力が現れる。
力学.31
質点系の質量中心 (重心)
5
質点系
とは,質点の集まりのこと。大きさを持つ物体も,細かく分けて考えれば質点の集まりとして扱う
ことができる。
5.1
内力と外力
¨
¥
¨
¥
¨
¥
高木 II p.5 佐本 p.163 戸田 p.144
§
¦
§
¦
§
¦
質点系にはたらく力には,質点系の外から作用する力 ( 外力
る力 ( 内力
と呼ぶ) と,質点系内の質点相互の間に作用す
と呼ぶ) がある。
質量 mi , i = 1 , · · · , N を持つ N 個の質点からなる質点系の運動方程式は
mi
∑
d2~ri (t)
= F~i (t) +
f~ji (t)
2
dt
¨
¥
¨
¥
¨
¥
佐本 (12.56) 高木 II (9.7) 戸田 (6.8)
§
¦
§
¦
§
¦
j6=i
(5.1)
~i (t) は i 番目の質点に時刻 t にはたらく外力,f~ji (t)
となる。ここで,V ri (t) は i 番目の質点の位置ベクトル,F
は j 番目の質点が i 番目の質点に時刻 t におよぼす内力を表す。
(5.1) の i = 1 , · · · , N についての和をとると, 作用・反作用の法則
f~ij = −f~ji
¨
¥
¨
¥
高木 II (9.6) 戸田 (2.11)
§
¦
§
¦
(5.2)
より,右辺の内力の和は 0 となる:
N
∑
i=1
5.2
d2~ri (t) ∑ ~
=
Fi (t)
dt2
i=1
¨
¨
¨
¥
¥
¥
佐本 (12.56) 高木 II (9.7) 戸田 (6.8) .
§
¦
§
¦
§
¦
N
mi
(5.3)
質点系の質量中心 (重心)
質量 mi , i = 1 , · · · , N を持つ N 個の質点からなる質点系を考える。それぞれの質点の位置ベクトルを ~ri , i =
1 , · · · , N とする。
~rG =
N
1 ∑
mi~ri
M i=1
で与えられる点をこの質点系の 質量中心 (重心)
¨
¥
¨
¥
¨
¥
佐本 (12.36) 高木 II (9.1) 戸田 (6.15)
§
¦
§
¦
§
¦
(5.4)
と呼ぶ。ここで
M=
N
∑
mi
(5.5)
i=1
は質点系の全質量を表す。質量中心は質点系の位置を代表する点といえる。(5.3) より,質量中心の運動方程式 は
d2~rG (t) ∑ ~
=
Fi (t)
dt2
i=1
N
M
¥
¥
¥
¨
¨
¨
佐本 (12.7) 高木 II (9.10) 戸田 (6.14)
§
¦
§
¦
§
¦
(5.6)
となる。すなわち
質点系の質量中心 (重心) は,その点に全質量が集まっていて,その点に全ての 外力 を合成した力がはたらいた
とした場合の質点と同じ運動をする。
力学.32
【問】2 つの質点 m1 ,m2 の質量中心は m1 から m2 に引いた直線を m2 : m1 に内分する点となることを示しな
さい。
【答】
~rG =
)
m1~r1 + m2~r2
m2 (
= ~r1 +
~r2 − ~r1
m1 + m2
m1 + m2
(5.7)
)
m2 (
m2 −→
~r2 − ~r1 =
AB
m1 + m2
m1 + m2
(5.8)
なので,右図の
−→
AG =
となる。また,
−→
GB = ~r2 − ~rG =
)
m1 (
m1 −→
~r2 − ~r1 =
AB
m1 + m2
m1 + m2
(5.9)
である。以上より,点 G は直線 AB 上にあり,
−→
|AG|
m2
−→ = m ,
1
|GB|
(5.10)
−→ −→
つまり |AG| : |GB| = m2 : m1 であることがわかる。
¤
¡¤
¡
佐本 図 12.7
戸田 図 6-2
£
¢£
¢
質量が空間に連続的に分布している場合の質量中心 (重心)
5.3
時刻 t の (質量) 密度を ρ(~r, t) とすると,質量中心はの位置ベクトルは次の体積積分 (3 重積分)
∫ ∫ ∫
1
rG (t) =
~r ρ(~r, t)dxdydz
M
∫ ∫ ∫
で与えられる。
M=
ρ(~r, t)dxdydz
は全質量を表す。M は時間によって変化しない。
【問】右図に示すような,一様な密度 ρ0 の物質で作られた,厚さ d,辺
の長さが a と b の直角3角形の物体の質量中心を求めなさい。
【答】
直角をはさむ 2 辺に沿うように x,y 軸を定める。0 ≤ z ≤ d の範囲
に物体を置く。この様に座標系をとると,物体の密度は
{
ρ0 ; 0 ≤ x ≤ a , , 0 ≤ y ≤ b − ab x , 0 ≤ z ≤ d
ρ(~r) =
0 ;
上記以外
(5.13)
となる。ここで,~r = (x, y, z)。まず,全質量は
∫
M
(5.11)
d
∫
a
∫
b
b− a
x
∫
dz
dx
dy = ρ0 d
0
0
0
]x=a
[
abd
b
= ρ0
= ρ0 d bx − x2
2a
2
x=0
a
= ρ0
となり,確かに (密度)×(体積) となっている。
0
(
)
b
b − x dx
a
(5.14)
(5.12)
力学.33
∫
∫ a ∫ b− ab x (
(
)
)
ρ0 d
~rG = xG , yG , zG =
dz
dx
dy x , y , z
M 0
0
0
(5.15)
の各成分を計算する:
xG
=
=
yG
=
=
zG
=
=
ρ0
M
∫
∫
d
0
∫
a
dz
b
b− a
x
dy =
dxx
0
0
ρ0 d
M
∫
a
0
(
)
[
]x=a
b
ρ0 d bx2
b
x b − x dx =
− x3
a
M
2
3a
x=0
ρ0 d a2 b
a
= ,
M 6
3
[ 2 ]y=b− ab x
)2
∫ d ∫ a ∫ b− ab x
∫
∫ (
ρ0
ρ0 d a
y
ρ0 d a
b
dz
dx
ydy =
dx
=
b − x dx
M 0
M 0
2 y=0
2M 0
a
0
0
)
[
]x=a
∫ a(
2
2
2
2
ρ0 d
b
b
ρ0 d ab2
b
b
ρ0 d 2
b
=
= ,
b2 − 2 x + 2 x2 dx =
b x − x2 + 2 x3
2M 0
a
a
2M
a
3a
2M
3
3
x=0
)
[ 2 ]z=d ∫ a (
[
]x=a
∫ d
∫ a ∫ b− ab x
ρ0
ρ0 z
b
ρ0 d2
b
zdz
dx
dy =
b − x dx =
bx − x2
M 0
M 2 0
a
2M
2a
0
0
0
x=0
ρ0 d2 ab
d
=
2M 2
2
(5.16)
(5.17)
(5.18)
より,質量中心の位置ベクトルは以下となる;
(
~rG =
5.4
a b d
, ,
3 3 2
)
.
(5.19)
質量中心 (重心) に対する質点の相対位置ベクトル
質量中心の運動と,質量中心に対する質点の相対運動を分けて考えるため,質
量中心に対する質点 mj の相対位置ベクトル (質量中心を始点とし,質点 mj を
終点とするベクトル) を r~0 j (t) とする。(座標系の原点 O を始点とする) 位置ベ
クトルを ~rj (t) とすると
¨
¥
¨
¥
¨
¥
佐本 (12.37) 高木 II (9.2) 戸田 (6.39)
§
¦
§
¦
§
¦
~rj (t) = ~rG (t) + r~0 j (t)
(5.20)
¤
¡¤
¡
佐本 図 12.7
高木 II 図 9.1
£
¢£
¢
という関係がある。
(5.20) の両辺に mj をかけて全ての質点についての和をとると
(右辺の和) =
N
∑
mj ~rj (t) = M~rG
(5.21)
j=1
となり,
(右辺の和) = ~rG (t)
N
∑
j=1
mj +
N
∑
mj r~0 j (t) = M~rG (t) +
j=1
N
∑
mj r~0 j (t)
(5.22)
j=1
となるので,r~0 j (t) には全ての時刻で次の関係がある:
N
∑
mj r~0 j (t) = ~0 .
j=1
(例) N = 2 の場合
r~0 1 =
¥
¥
¥
¨
¨
¨
佐本 (12.39) 高木 II (9.5) 戸田 (6.41)
§
¦
§
¦
§
¦
)
m2 (
~r1 − ~r2 ,
m1 + m2
r~0 2 =
)
m1 (
~r2 − ~r1 .
m1 + m2
(5.23)
(5.24)
力学.34
質点系の運動量とエネルギー
6
質点系の全運動量
6.1
~ とすると
質量 m1 , m2 , · · · , mN を持つ N 個の質点系を考える。質点系の全運動量を P
P~ =
N
∑
i=1
mi
d~ri (t)
d~rG (t)
=M
dt
dt
¨
¥
¨
¥
高木 II (8.9) 戸田 (6.19)
§
¦
§
¦
(6.1)
と書ける。すなわち
(質点系の全運動量) = (質量中心の運動量)
(6.2)
となる。質点系の全運動量はすべて質量中心の運動で表すことができる。
質点系の全運動エネルギー
6.2
一方,質点系の全運動エネルギー K =
より
¯
¯2
N
∑
mj ¯¯ d~rj (t) ¯¯
は全てを質量中心の運動で表すことはできない。(5.20)
2 ¯ dt ¯
j=1
d~rj (t)
d~rG (t) dr~0 j (t)
=
+
なので
dt
dt
dt
¯
¯2
¯
¯2
¯
¯
N
N
¯ d~r
~0 j ¯¯ dr~0 j ¯¯
¯ d~rG ¯2
1∑
dr~0 j ¯¯
d
r
d~
r
1∑
¯ G
G
¯ +2
mj ¯
mj ¯¯
K =
+
·
+¯
¯ =
¯
¯ dt
¯ dt ¯
2 j=1
dt ¯
2 j=1
dt ¯
dt
dt
¯
¯
¯
¯
N
N
N
¯ dr~0 ¯2
∑
¯ d~rG ¯2 d~rG d ∑
1∑
1
¯
¯
j
¯ +
mj ¯¯
·
mj r~0 j +
mj ¯
=
¯
¯ dt ¯
2
dt ¯
dt dt
2
j=1
j=1
(6.3)
j=1
となるが,(5.23) より第 2 項は 0 となる。従って
¯
¯2 ∑
N
M ¯¯ d~rG ¯¯
mj
K=
+
¯
¯
2 dt
2
j=1
¯
¯
¯ dr~0 ¯2
¯ j¯
¯
¯
¯ dt ¯
¨
¨
¨
¥
¥
¥
佐本 (12.40) 高木 II (9.12) 戸田 (6.43))
§
¦
§
¦
§
¦
(6.4)
となる。上式の第 1 項は質量中心 (重心) に全質量が集まって運動する場合の運動エネルギー (質量中心の運動エ
ネルギー) を表し,第 2 項は質量中心に相対的な質点の運動の運動エネルギーを表す。すなわち
(質点系の全運動エネルギー) = (質量中心の運動エネルギー) + (質量中心に対する相対運動エネルギー) (6.5)
となる。
【問】
摩擦の無視できる水平面上に置かれた質量 m1 ,m2 , m3 の 3 つの質点の運動を考える。質点は水平面上
の x 軸上を運動するとする。下図に示すように,質点 m1 と m2 はばね定数 k ,自然長 ` のばねでつながれ,静
止している。時刻 t = 0 に,質点 m1 の左側から質点 m3 が速度 (の x 成分)v0 (> 0) で衝突した。質点間の衝突
は 弾性衝突
であるとして,衝突の前後での質点系 {m1 , m2 } の質量中心の速度と質点 m3 の速度を求めなさい。
m3
v0
m1
k l
m2
x
O
力学.35
【答】
質点 {m1 , m2 } を質点系1,質点 {m3 } を質点系2と呼ぶことにする。
質点 m1 と m3 の衝突直後の速度 (の x 成分)を v1 および v3 とする。衝突の前後での運動量と運動エネルギー
の保存
m3 v0 = m3 v3 + m1 v1 ,
より
v1 =
2m3
v0 ,
m1 + m3
m3 2
m3 2 m1 2
v0 =
v +
v
2
2 3
2 1
(6.6)
m3 − m1
v0
m1 + m3
(6.7)
v3 =
が得られる。これより,衝突 (直) 後の質点系 1,2 の質量中心の速度を VG1 および VG2 とすると,
VG1 =
m1 v1
2m1 m3
=
v0 ,
m1 + m2
(m1 + m2 )(m1 + m3 )
VG2 = v3 =
m3 − m1
v0
m1 + m3
(6.8)
となる。m1 と m3 の衝突が 2 度とおきないとすると,外力が働かないため,それぞれの質点系 1,2 の質量中心の
速度は変化しない。
衝突 (直) 後の質点系 1,2 の質量中心の運動エネルギーは
KG1 =
2m21 m23
v2 ,
(m1 + m2 )(m1 + m3 )2 0
KG2 =
m3 (m3 − m1 )2 2
v
2 (m1 + m3 )2 0
(6.9)
となり,質点系 1,2 の質量中心の運動エネルギーの和
KG1 + KG2 =
m3 2
2m1 m2 m23
v0 −
v2
2
(m1 + m2 )(m1 + m3 )2 0
(6.10)
は衝突の前後で減少することがわかる。
次に衝突後に質点 m1 と m2 の運動を考える。質点 m1 と m2 の x 座標を x1 および x2 とすると,運動方程
式は
d2 x1 (t)
dt2
d2 x2 (t)
m2
dt2
m1
(
)
= k x2 (t) − x1 (t) − ` ,
(
)
= −k x2 (t) − x1 (t) − `
(6.11)
(6.12)
となる。質点系1の質量中心の座標
xG1 (T ) =
m1 x1 (t) + m2 x2 (t)
m1 + m2
(6.13)
と,質点 m1 に対する質点 m2 の座標
¨
¥
¨
¥
高木 II (8.19) 戸田 (6.26)
§
¦
§
¦
r(t) = x2 (t) − x1 (t)
(6.14)
を用いて運動方程式を書くと
M
となる。ここで
µ=
は 換算質量
と呼ばれる。
d2 XG1 (t)
dt2
d2 r(t)
µ
dt2
m1 m2
m1 + m2
=
=
0,
M = m1 + m2 ,
(
)
−k r(t) − ` , µ =
(6.15)
m1 m2
m1 + m2
¨
¥
¨
¥
¨
¥
佐本 (9.43) 高木 II (8.21)) 戸田 (6.28)
§
¦
§
¦
§
¦
(6.16)
(6.17)
力学.36
衝突直後の時刻を t = 0 とすると,t > 0 で
¯
dxG1 (t) ¯¯
t,
dt ¯t=0
¯
(
)
1 dr(t) ¯¯
= ` + r(0) − ` cos(ωt) +
sin(ωt)
ω dt ¯t=0
xG1 (t)
= xG1 (0) +
r(t)
となる。ここで,
(6.18)
(6.19)
√
ω=
k
µ
(6.20)
である。
衝突直後の質点 m1 と m2 の位置と速度,
x1 (0) = 0 ,
x2 (0) = ` ,
¯
dx1 (t) ¯¯
= v1 ,
dt ¯t=0
¯
dx1 (t) ¯¯
= 0,
dt ¯t=0
(6.21)
より,xG1 (t) と r(t) の初期条件は
xG1 (0) =
r(0) =
¯
m2
dxG (t) ¯¯
m1 v1
`,
=
,
m1 + m2
dt ¯t=0
m1 + m2
¯
¯
¯
dr(t) ¯¯
dx2 (t) ¯¯
dx1 (t) ¯¯
`,
=
−
= −v1
dt ¯t=0
dt ¯t=0
dt ¯t=0
(6.22)
(6.23)
となる。従って t > 0 で質点系1の質量中心の座標と相対座標は
m2 ` + m1 v1 t
m1 + m2
v1
`−
sin(ωt)
ω
xG1 (t) =
r(t) =
(6.24)
(6.25)
となる。x1 (t) と x2 (t) は (6.13) と (6.14) より
x1 (t)
x2 (t)
m2
r(t) ,
m1 + m2
m1
= xG (t) +
r(t)
m1 + m2
= xG (t) −
(6.26)
(6.27)
から得られる。
質点系1と2の質量中心の運動エネルギーの和は衝突の前後で保存しないが,質点系1+2の全力学的エネル
ギーは
m3
E=
2
(
dx3 (t)
dt
)2
m1
+
2
(
dx1 (t)
dt
)2
m2
+
2
(
dx2 (t)
dt
)2
+
k
m3 2
2
(x2 (t) − x1 (t) − `) =
v
2
2 0
(6.28)
となり,保存していることがわかる。上式右辺の第3項は,ばねの弾性力の位置エネルギー
U (x1 , x2 ) =
k
2
(x2 (t) − x1 (t) − `)
2
(6.29)
を表す。これは質点系1の内力に対する力のポテンシャルとなっている:
(m1 に働く内力) =
(m2 に働く内力) =
(
)
∂U (x1 , x2 )
= k x2 (t) − x1 (t) − ` ,
∂x1
(
)
∂U (x1 , x2 )
−
= −k x2 (t) − x1 (t) − ` .
∂x2
−
(6.30)
(6.31)
力学.37
6.3
2 物体の衝突におけるはねかえり係数 (反発係数)
m1
m2
v1
m1
v2
v1′
ⴣ⓭
m2
v2′
x
x
上でみたように,2 つの質点系 (物体) の衝突では,衝突の前後で,質点系の質量中心の運動量は保存するが,質
量中心の運動エネルギーは保存しない。衝突の前後での運動エネルギーの変化を特徴づけるはねかえり係数 (反発
係数) と呼ばれる量を紹介する。簡単のために質点系1と2が x 軸上を運動する場合を考える。質点系 i の全質量
を mi ,質量中心の座標を xi とする (i = 1, 2)。2 つの質点系全体の質量中心の座標を xG とすると
xG =
m1 x1 + m2 x2
,
M
M = m1 + m2
(6.32)
より,質点系1+2の全運動量は
m1 v1 + m2 v2 = M
dxG
,
dt
vi =
dxi
dt
(6.33)
となる。
質点系1+2のそれぞれの質量中心の運動エネルギーの和は
M 2
µ ( dx )2
m1 2 m2 2
v1 +
v2 =
vG +
,
2
2
2
2 dt
µ=
m1 m2
m1 + m2
(6.34)
と書ける。ここで,µ は換算質量,
x = x2 − x1
(6.35)
は物体 1 からみた物体 2 の相対座標となる。
2 つの物体の衝突を考える。衝突前の 2 物体の (質量中心の) 速度が v1 ,v2 であり,衝突後に 2 物体の (質量中
心の) 速度が v10 ,v20 になったとする。全運動量は常に保存するので
m1 v1 + m2 v2 = m1 v10 + m2 v20
(6.36)
が成り立つ。従って (6.33) より,xG の速度は一定となる。
更に,質量中心の運動エネルギーの和も保存する場合は,(6.34) から相対速度の大きさが衝突の前後で変わらな
いことがわかる。衝突するのだから,相対速度の向きは,衝突の前後で逆になるので
e≡
v10 − v20
v2 − v1
で定義された はねかえり係数 (反発係数)
(m
1 2
v1
2
+
¥
¥
¥
¨
¨
¨
佐本 (5.5) 高木 II (9.24) 戸田 (2.20)
§
¦
§
¦
§
¦
(6.37)
を用いると,衝突の前後で質量中心の運動エネルギーの和は
)
m2 2 ) ( m1 02 m2 02 ) µ
µ
µ(
v2 −
v1 +
v2 = (v2 − v1 )2 − (v20 − v10 )2 =
1 − e2 (v2 − v1 )2
2
2
2
2
2
2
だけ減少することがわかる。e = 1 の場合を 弾性衝突
を 完全非弾性衝突
,0 < e < 1 の場合を 非弾性衝突
(6.38)
,e = 0 の場合
と呼ぶ。
衝突後の 2 物体の速度は
v10
v20
となる。
m2 0
(v − v10 ) = vG +
M 2
m1 0
(v − v10 ) = vG −
= vG +
M 2
= vG −
m2
m1 − em2
m2 (1 + e)
e(v2 − v1 ) =
v1 +
v2 ,
M
M
M
m1
m1 (1 + e)
m2 − em1
e(v2 − v1 ) =
v1 +
v2
M
M
M
(6.39)
(6.40)
力学.38
質点系の角運動量
7
質点系の角運動量
7.1
質点系の角運動量は質点系を構成する質点の角運動量の和:
~ =
L
N
∑
¨
¥
戸田 (6.52)
§
¦
~rj × p~j .
j=1
(7.1)
ここで,質量 m1 , m2 , · · · , mN を持つ N 個の質点系を考えた。j 番目の質点の位置ベクトルを ~rj ,運動量ベク
d~rj
トルを p
~j = mj
とする。
dt
~を
質量中心 (重心) の位置ベクトル ~rG と,質量中心に相対的な運動を表す位置ベクトル r~0 j (5.20) を用いて L
表す:
)
}
{
N
∑
dr~0 j
d~rG
dr~0 j ~0
d~rG ~0
dr~0 j
d~rG
+
=
mj ~rG ×
+ ~rG ×
+r j ×
+r j ×
dt
dt
dt
dt
dt
dt
j=1
j=1
N
N
N
∑
d~rG
d ∑
dr~0 j
d~rG ∑ ~0
0
0
~
~
= ~rG × M
+ ~rG ×
mj r j +
mj r j ×
+
r j × mj
.
(7.2)
dt
dt j=1
dt
dt
j=1
j=1
~ =
L
N (
)
∑
~rG + r~0 j × mj
(
(5.23) より,上式右辺の第 2 項と第 3 項は ~0 となるので,
¨
¥
¨
¥
¨
¥
佐本 (12.55) 高木 II (8.37) 戸田 (6.64)
§
¦
§
¦
§
¦
~ =L
~G + L
~0
L
(7.3)
となる。ここで
¨
¥
~ G = ~rG × M d~rG
L
戸田 (6.61)
(7.4)
§
¦
dt
は原点 O に関する質量中心の角運動量で,質点系の全質量が質量中心に集中したと考えた場合の角運動量である。
また,
~0 =
L
N
∑
¨
¥
戸田 (6.63)
§
¦
dr~0 j
r~0 j × mj
dt
j=1
(7.5)
は質量中心のまわりに各質点が持つ角運動量の和である。すなわち
(点 O に関する質点系の角運動量)
=
(点 O に関する質量中心の角運動量)
+(質量中心のまわりの各質点の運動による角運動量)
(7.6)
となる。
7.2
質点系にはたらく力のモーメント
角運動量の時間変化は力のモーメン (3.15) に等しい。質点系にはたらく力のモーメントは
N
N
N ∑
∑
∑
∑
∑
~ =
f~kj =
~rj × f~kj
N
~rj × F~j +
~rj × F~j +
j=1
k6=j
j=1
j=1 k6=j
~j は質点 j にはたらく外力,f~kj は質点 k が質点 j におよぼす内力を表す。
となる。F
(7.7)
力学.39
内力 f~kj は作用・反作用の法則 (5.2) を満たすので
N ∑
∑
j=1 k6=j
) 1 ∑∑
1 ∑∑(
~rj × f~kj =
(~rj − ~rk ) × f~kj
~rj × f~kj + ~rk × f~jk =
2 j=1
2 j=1
N
N
k6=j
(7.8)
k6=j
となるが,f~kj は ~rj − ~rk と平行なので,
(~rj − ~rk ) × f~kj = ~0
(7.9)
となる。以上より, 質点系にはたらく力のモーメントは外力のみによって決まる:
~ =
N
N
∑
¨
¥
戸田 (6.56)
§
¦
~rj × F~j .
j=1
(7.10)
従って
∑
~
dL
=
~rj × F~j
dt
j=1
¤
¡¨
¥
¨
¥
戸田 (6.57)
£佐本 12.33 ¢§高木 II (9.18) ¦
§
¦
N
(7.11)
であることがわかる。 質点系の角運動量の時間的変化は外力のモーメント等しい。
~ は
質点 j の質量中心 (重心),~rG ,に対する相対的位置ベクトル,r~0 j = ~rj − ~rG ,を用いると N
~ =
N
N (
N
N
)
∑
∑
∑
~G + N
~0
~rG + r~0 j × F~j = ~rG ×
F~j +
r~0 j × F~j = N
j=1
j=1
と書ける。ここで
~ G = ~rG ×
N
N
∑
j=1
¥
¨
戸田 (6.68)
§
¦
¨
¨
¥
¥
佐本 (13.55) 戸田 (6.66)
§
¦
§
¦
F~j
j=1
(7.12)
(7.13)
は,仮に外力が全て質量中心にはたらいたとしたときの,原点に関する外力のモーメントである。また,
~0 =
N
N
∑
¥
¥
¨
¨
佐本 (13.55) 戸田 (6.67)
§
¦
§
¦
r~0 j × F~j
j=1
(7.14)
は質量中心に対する外力のモーメントである。
∑
d2~rG
=
F~j ,より
2
dt
j=1
N
~ G の時間変化は (5.6),M
ところが,L
~G
dL
dt
(
)
N
∑
d
d~rG
d2~rG
~rG × M
= ~rG × M 2 = ~rG ×
F~j
dt
dt
dt
j=1
¨
¥
¨
¥
¨
¥
~G
= N
佐本 (13.54) 高木 II (9.20) 戸田 (6.70)
§
¦
§
¦
§
¦
=
(7.15)
となるので,(7.3) と (7.12) より,
~0
dL
~0
=N
dt
¥
¥
¥
¨
¨
¨
佐本 (13.54) 高木 II (9.21) 戸田 (6.71)
§
¦
§
¦
§
¦
(7.16)
が得られる。(7.15) と (7.16) は角運動量に対する運動方程式が,質量中心 (重心) に関する式と,質量中心のまわ
りの角運動量に対する式に分かれる事を意味する。
力学.40
固定軸のまわりの剛体の回転運動
8
.
8.1
剛体
変形が無視できるとした物体を 剛体
と呼ぶ。剛体は,全ての質点間の距離が時間的に変化しないという条
件のついた質点系である。
剛体の配置を定めるには 6 つの変数が必要である。このことを 剛体の 自由度
¨
¥
は 6 である という。 高木 II §10.1
§
¦
例えば,剛体内の 2 点 A,B の座標 (xA , yA , zA ),(xB , yB , zB ),と,剛体が
A,B を通る直線のまわりにどれだけ回転してるかを表す角度 φ が定まれば剛
体の配置は決まる。|~rA − ~rB | は一定なので,(xA , yA , zA ),(xB , yB , zB ),の
ϕ
内,1 つの変数は他の変数で表される。
【注】質点の自由度は 3 である。
剛体の運動は質量中心 (重心) の運動を表す 3 つの方程式と,質量中心のまわりの回転運動を表す 3 つの方程式
によって決まる。
8.2
固定軸を持つ剛体の回転運動
剛体が固定された軸のまわりに回転する場合を考える。この場合,剛体の配置
は軸のまわりの回転角 φ だけで定まる。すなわち,固定軸を持つ剛体の自由度
は 1 となる。
固定軸を z 軸とする。剛体を作る j 番目の質点の位置ベクトル ~rj (t) は
~rj (t) = (`j cos(φ(t) + θj ) , `j sin(φ(t) + θj ) , zj )
(8.1)
となる。`j ,θj ,zj は時間に依存しない定数で,時刻 t = 0 での j 番目の質点
の位置を定める。j 番目の質点の速度ベクトルは
~vj (t) = ω(t) (−`j sin(φ(t) + θj ) , `j cos(φ(t) + θj ) , 0)
となる。
ω(t) =
¨
¥
戸田 (7.3)
§
¦
dφ(t)
dt
(8.2)
(8.3)
は剛体の角速度である。
原点 O に対する剛体の角運動量は
~ =
L
N
∑
j=1
mj ~rj × ~vj = ω
N
∑
(
)
mj − zj `j cos(φ + θj ) , −zj `j sin(φ + θj ) , `2j
(8.4)
j=1
となる。特に角運動量の固定軸成分 (固定軸に関する角運動量)Lz は
Lz (t) = Iz ω(t)
となる。ここで,
¨
¥
¨
¥
¨
¥
佐本 (13.9) 高木 II (11.3) 戸田 (7.6)
§
¦
§
¦
§
¦
(8.5)
力学.41
Iz =
N
∑
¨
¥
¨
¥
¨
¥
佐本 (13.10 高木 II (11.4) 戸田 (7.5)
§
¦
§
¦
§
¦
mj `2j
j=1
(8.6)
は固定軸 (z 軸) のまわりの剛体の 慣性モーメント と呼ばれる。`j は j 番目の質点の固定軸からの距離を表す。
~
~ の z 成分より,φ(t) の時間変化を定める運動方程式
角運動量に対する運動方程式 dL/dt
=N
Iz
¥
¥
¥
¨
¨
¨
佐本 (13.11 高木 II (11.5) 戸田 (7.8)
§
¦
§
¦
§
¦
d2 φ(t)
= Nz (t)
dt2
(8.7)
が得られる。Nz (t) は時刻 t に剛体にはたらく外力のモーメントである。
なお,剛体の回転の運動エネルギーは (8.2) より,
K=
N
∑
mj
j=1
2
|~vj |2 =
N
ω(t)2 ∑
1
mj `2j = Iz ω(t)2
2 j=1
2
¨
¥
¨
¥
¨
¥
佐本 (13.14) 高木 II (11.40) 戸田 (7.18)
§
¦
§
¦
§
¦
(8.8)
となる。
8.3
簡単な形の剛体の慣性モーメント
簡単な形の剛体の z 軸のまわりの慣性モーメントを計算する。
(1) 質量の無視できる伸び縮みしない棒でつながれた 2 つの質点からなる剛体
図より `1 = a sin(θ),`2 = b sin(θ) なので
Iz = (m1 a2 + m2 b2 ) sin2 (θ)
(8.9)
(2) 一様な質量密度 ρ0 の物質で作られた,半径 a,厚さ d の円板の中心に,円板に
垂直に固定軸をとりつけた場合
xy 平面が円板をちょうど半分に分けるように,xy 軸をとると
∫
Iz = ρ0
∫
d/2
dxdy(x2 + y 2 )
dz
−d/2
(8.10)
x2 +y 2≤a2
となる。2 次元の極座標
x = r cos(θ) ,
y = r sin(θ) ,
dxdy = rdrdθ
(8.11)
を用いて
∫
Iz = dρ0
∫
a
2
drr
0
[
2π
dθr = 2πdρ0
0
r4
4
]r=a
=
r=0
π
ρ0 da4
2
(8.12)
となる。剛体の質量は M = πa2 dρ0 なので
Iz =
となる。
M 2
a
2
¥
¥
¥
¨
¨
¨
佐本 (13.45 高木 II (11.14) 戸田 (730)
§
¦
§
¦
§
¦
(8.13)
力学.42
【問】図に示すように,一様な密度の半径 a,厚さ d,質量 M の円板の中心に
円板に垂直に軸を固定し,回転できるようにする。円板に伸び縮みしない
軽い糸をまいて一定大きさ F の力で引いた。t = 0 で円板が静止してい
るとして,時刻 t で円板がどれだけ回転しているか回転角 φ(t) を求めな
さい。
【答】固定軸を z 軸とする。力の作用点が xy 平面上にあるように x,y 軸をと
る。図のように座標軸をとると,力の作用する点 ~r は
~r = (−a , 0 , 0) ,
(8.14)
F~ = (0 , −F , 0)
(8.15)
~は
力F
となるので,力のモーメントは
~ = (0 , 0 , aF )
N
(8.16)
となる。φ(t) に対する運動方程式は
d2 φ(t)
= aF ,
dt2
となる。回転の始まる時刻を t = 0 とすると
Iz
φ(0) = 0 ,
なので
φ(t) =
となる。
Iz =
M 2
a
2
¯
dφ(t) ¯¯
=0
dt ¯t=0
F 2
t ,
Ma
t>0
(8.17)
(8.18)
(8.19)
力学-補.1
¨
¥¤
¡
§高木 I p.161 ¦£佐本 付録 ¢
オイラー (Euler) の公式
実数 θ に対して
· · · オイラーの公式
eiθ = cos θ + i sin θ
(s-1.1)
の関係がある.この関係式を用いて複素数の指数関数が次のように与えられる;
複素数 z = a + iθ (a と θ は実数) に対して,
ea+iθ = ea eiθ = ea (cos θ + i sin θ) .
(s-1.2)
(参考):
テイラー展開による eiθ = cos θ + i sin θ の導出
ex のテイラー展開で x = iθ とおくと,
1 2 1 3
x + x +···
2!
3!
1
1
=1+iθ− θ2 − iθ3 + · · ·
2!
3!
ex =1+x +
(s-1.3)
eiθ
(s-1.4)
一方, cos θ, sin θ のテイラー展開より,
−
cos θ =1
sin θ =
θ
i sin θ =
iθ
1 2
θ
2!
+···
1 3
θ +···
3!
1
− iθ3 + · · ·
3!
−
(s-1.5)
(s-1.6)
(s-1.7)
したがって, eiθ = cos θ + i sin θ.
【注】三角関数の加法定理の内容は指数関数で表すと ei(α+β) = eiα eiβ となる;
eiα eiβ
=
”
cos(β) + i sin(β)
“
”
cos(α) cos(β) − sin(α) sin(β) + i cos(α) sin(β) + sin(α) cos(β)
=
cos(α + β) + i sin(α + β) = ei(α+β) .
=
“
cos(α) + i sin(α)
”“
【注】三角関数の微分の内容は指数関数で表すと
ieiθ
=
=
(s-1.8)
deiθ
= ieiθ となる;
dθ
“
”
i cos(θ) + i sin(θ) = − sin(θ) + i cos(θ)
d cos(θ)
d sin(θ)
deiθ
=
+i
.
dθ
dθ
dθ
(s-1.9)
力学-補.2
複素数のまとめ
x, y, r, θ は実数, r ≥ 0.
y
z
実/虚部表示 極表示
y=Im z
=reiθ
複素数
z
実部
Re z =x
=r cos θ
虚部
Im z =y
√
|z| = x2 + y 2
=r sin θ
絶対値
偏角
=x + iy
0
=r(≥ 0)
arg z=
θ
z¯
=x − iy
=re
θ
x=Re z
-z
(tan θ = xy )
複素共役
r
iz
−iθ
x
z
複素平面
【注】 z の複素共役を z¯ ではなく z ∗ と書く場
横軸に実部 x, 縦軸に虚部 y を描いたもの
合もあります。
・ いくつかの公式
z = x + iy = reiθ , (x, y, r, θ は実数.)
・ez の性質
e0 = e2πi = 1 ,
|ez | = ex ,
ez
z¯
=e ,
特に
特に
eπi = −1.
(s-2.1)
|eiy | = 1.
eiy
=e
−iy
.
(s-2.2)
(s-2.3)
・微分積分
d zt
e = zezt .
dt
∫
1
ezt dt = ezt + C.
z
(s-2.4)
(s-2.5)
・オイラーの公式を逆に解いたもの
eiθ − e−iθ
eiθ − e−iθ
= −i
,
2i
2
eiθ + e−iθ
cos θ =
,
2
sin θ =
(s-2.6)
(s-2.7)
・複素共役, −1 倍, 逆数.
z¯ = reiθ = re−iθ ,
−z = −r(e ) = re
1
1
1
= iθ = e−iθ
z
re
r
iθ
i(θ+π)
(s-2.8)
,
(s-2.9)
(s-2.10)
© Copyright 2026 Paperzz