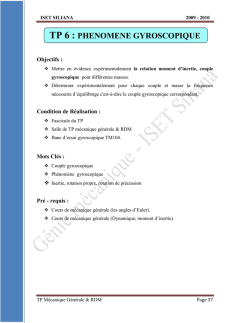
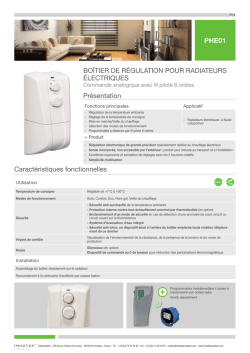
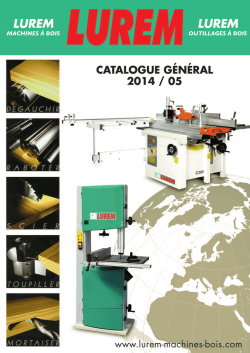
Gyroscopes et gyromètres mécaniques avec élément rotatif par Jean-Claude RADIX Ingénieur civil des Télécommunications Professeur indépendant 1. 1.1 1.2 1.3 Phénomènes gyroscopiques ................................................................. Approximation gyroscopique..................................................................... Dérive gyroscopique ................................................................................... Couple gyroscopique .................................................................................. R 1 940 - 2 — 2 — 2 — 3 2. 2.1 2.2 Gyroscopes 1 axe ..................................................................................... Définition et structure.................................................................................. Modes de fonctionnement.......................................................................... — — — 4 4 4 3. 3.1 3.2 Gyroscopes à deux degrés de liberté ................................................. Définition et structure.................................................................................. Gyroscope à suspension élastique compensée (gyroscope SEC)........... — — — 6 6 7 4. Performances des gyroscopes et gyromètres.................................. — 8 5. 5.1 5.2 5.3 5.4 Exemples d’appareils .............................................................................. Gyromètre SFIM, GR-G5 ............................................................................. Gyromètre SEXTANT, type J 118 ................................................................ Gyroscope SAGEM GSL 82, à suspension élastique compensée ........... Gyromètre asservi miniature SFIM GYCAS............................................... — — — — — 9 9 9 9 10 Références bibliographiques ......................................................................... — 10 ’une manière générale, on appelle gyroscope tout appareil permettant d’effectuer une mesure de la rotation de son boîtier vis-à-vis de l’espace absolu. Par ailleurs, on appelle gyromètre tout appareil permettant d’effectuer une mesure d’une (ou deux) composante(s) de la rotation instantanée absolue de son boîtier. À l’heure actuelle, ces appareils mettent en jeu divers phénomènes physiques : — l’inertie de la matière : il s’agit alors de capteurs mécaniques, lesquels présentent toujours un élément mobile par rapport à leur boîtier : cet élément peut être rotatif (cas traité dans cet article), ou vibrant (cas traité dans l’article « Gyroscopes mécaniques vibrants »). — la propagation de la lumière : il s’agit alors de capteurs optiques (gyromètres laser, gyromètres à fibre optique), objets de l’article « Gyromètres optiques ». D Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle R 1 940 − 1 GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF ___________________________________________________________________________ 1. Phénomènes gyroscopiques de directions différentes. Par contre, dans le cas d’une toupie, nous avons généralement : AT = BT ≈ CT p et q << r Les propriétés d’une toupie en rotation rapide ne sont pas intuitives ; chacun de nous a été amusé ou déconcerté par les évolutions du jouet vendu sous le nom de gyroscope, et par les réactions bizarres qui sont ressenties lorsqu’on le tient à la main, rotor lancé. Et pourtant, ces propriétés peuvent être logiquement déduites des lois de la mécanique rationnelle, auxquelles nous sommes directement et quotidiennement confrontés. Ce paradoxe tient au fait que nos expériences banales ne mettent généralement en jeu que de faibles vitesses angulaires absolues, ne provoquant pas l’apparition de phénomènes gyroscopiques. Le comportement des appareils gyroscopiques de pilotage peut généralement être compris en utilisant les notions de précession gyroscopique (§ 1.2) et de couple gyroscopique (§ 1.3). Ces concepts peuvent être reliés à la mécanique rationnelle, d’une manière simple, en faisant intervenir la notion d’approximation gyroscopique. Pour les lois de la mécanique rationnelle, le lecteur se reportera aux articles de mécanique générale dans le traité Sciences fondamentales. Il s’ensuit que H et Ω présentent alors des directions très voisines de celle de l’axe ∆. L’approximation gyroscopique consiste précisément à admettre, pour le rotor du gyroscope, la condition : H // axe ∆, lié au rotor Dans les gyroscopes de pilotage et de navigation en fonctionnement normal, cette condition est généralement vérifiée. En effet, les toupies utilisées sont de révolution par rapport à l’axe ∆, ce qui assure la condition AT = BT ; de plus, leur forme trapue donne le même ordre de grandeur à CT . Par ailleurs, les vitesses de rotation adoptées r, autour de leur axe ∆, sont de l’ordre de plusieurs centaines de tours par seconde, à comparer aux composantes p, q de la rotation instantanée de l’axe ∆ lui-même, de l’ordre de quelques degrés par seconde, dans les cas les plus défavorables. Exemple : considérons le cas d’un gyroscope utilisé dans une centrale de navigation par inertie pour avion ; nous avons : AT p p 10 Ð2 °/h 5 × 10 Ð8 rad/s ------------ ≈ ---- ≈ ------------------------- ≈ -------------------------------------------<<1 r CT r 400 tr/s 2 500 rad/s 1.1 Approximation gyroscopique Considérons le mouvement angulaire d’une toupie T, composée de points matériels M de masse m, autour d’un point fixe O. Le moment cinétique de T, par rapport à O, est défini par : ∆ dOM H = ∑ OM ∧ m -------------dt T Les conditions ( H suivante : La dérivation de OM a lieu après projection sur un trièdre centré en O et de vitesse angulaire absolue égale à zéro (trièdre inertiel, du point de vue des mouvements angulaires), l’indice a signifiant absolu. Par ailleurs, x, y, z étant les coordonnées de M dans un trièdre principal d’inertie (x, y, ∆) de T ([5], chapitre 2, § 2.4), nous posons : ∆ AT = ∑ m ( y 2 + z2 ) (2) ∆ BT = ∑ m ( z 2 + x 2 ) (3) ∆ CT = ∑ m ( x 2 + y 2 ) (4) T // ∆) et ( H (7) = Cte ) impliquent la condition H lié à l’axe ∆ du rotor (8) que nous admettrons dans la suite. 1.2 Dérive gyroscopique ment les conditions ( H = Cte ) et ( H // ∆). Notre problème est de connaître le mouvement angulaire de ∆ lorsque l’on applique au rotor un système de forces assimilables à un couple C a . Pour continuer à respecter la condition ( H T moments d’inertie principaux, Ω étant la rotation instantanée absolue de T, de composantes (p, q, r ) sur (x, y, ∆). Les relations (1) à (4) impliquent : (5) limiter son module à une faible valeur, afin de rester dans l’approximation gyroscopique. Appliquons le théorème du moment cinétique ([5], chapitre 1, § 2.5) au rotor, nous obtenons : vecteurs unitaires portés par x, y, ∆. teurs rotation instantanée Ω et moment cinétique H peuvent être = Cte ) , nous choisissons C a perpendiculaire à ∆ ; par ailleurs, nous devons D’une manière générale, les paramètres AT, BT, CT, p, q, r peuvent présenter des ordres de grandeur différents ; il s’ensuit que les vec- R 1 940 − 2 = Cte Considérons un rotor de gyroscope animé d’une rotation ω importante autour de son axe de révolution ∆ et respectant sensible- T x, y, ∆ H (1) ∆ se lit égal à, par définition. Nota : le symbole = avec Par ailleurs, dans la majorité des cas, un moteur électrique agit sur le rotor du gyroscope pour maintenir sa vitesse de rotation par rapport au boîtier à une valeur sensiblement constante. Cela nous permet d’admettre la condition supplémentaire suivante : a H = A T px + B T qy + C T r ∆ (6) avec H ( d---------) dt H ( d---------) dt a a = Ca vitesse absolue du moment cinétique. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle (9) __________________________________________________________________________ GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF D D dH dt a H H ΩD ΩD Ca y Cg x x Figure 1 – Réponse Ω ∆ du rotor, de moment cinétique H , Figure 2 – Réponse C g = H ∧ Ω ∆ à l’application d’un couple C a d’une rotation Ω ∆ imposée à son axe ∆ La condition (8) nous permet de considérer H comme lié à ∆, et par suite de lui appliquer la relation : H ( d---------) dt a = Ω∆ ∧ H du rotor, à l’application k θg (10) A T i Ω ∆ est la rotation instantanée absolue de l’axe géométrique ∆ ; c’est un vecteur que l’on peut toujours supposer perpendiculaire à j ∆ ; en effet, une composante de Ω ∆ suivant ∆ serait sans effet, puisque nous avons admis H // ∆ ; son produit vectoriel par H , dans la relation (10), serait nul. Des relations (9) et (10), nous déduisons : Figure 3 – Définition du trièdre orthonormé i , j , k (lié à A) et de la rotation θg de la toupie T par rapport à l’anneau porteur A Ca = Ω∆ ∧ H L’usage fait donner des appellations différentes à cette composante de rotation instantanée Ω ∆ : — lorsqu’elle est due à un phénomène déterministe et connu, on l’appelle précession gyroscopique ; — lorsqu’elle est due à un phénomène aléatoire, ou bien que l’on ne maîtrise pas, on l’appelle dérive gyroscopique. Nous obtenons donc : Cg = Ð Ca = Ð Ω∆ ∧ H = H ∧ Ω∆ (12) Cette relation peut être interprétée de la façon suivante (figure 2) : Nous obtenons finalement le résultat suivant (figure 1) : L’application d’un couple C a à un rotor de moment cinétique H vérifiant l’approximation gyroscopique provoque une rotation instantanée absolue Ω ∆ de cet axe, obéissant à la relation : Ca = Ω∆ ∧ H — un couple de réaction C g , opposé à C a , d’après le principe de l’égalité de l’action et de la réaction. À l’application d’une rotation instantanée Ω ∆ , le rotor réagit par un couple gyroscopique C g = H ∧ Ω ∆ , perpendiculaire à Ω ∆ . Ce couple gyroscopique C g , dû à l’application de Ω ∆ , n’est pas (11) plus intuitif que la précession (ou la dérive) gyroscopique due au couple appliqué C a . Cela est dû à la perpendicularité de C g Ω ∆ , qui surprend nos habitudes. 1.3 Couple gyroscopique Considérons à nouveau l’expérience étudiée au paragraphe 1.2. À l’application de C a , le rotor réagit par : — une précession (ou une dérive) Ω ∆ d’après (11) : et perpendiculaire à C a , Notons enfin que la notion de couple gyroscopique peut être introduite indépendamment de l’approximation gyroscopique, grâce au théorème de Beghin ([5], p. 48), comme suit. Étant donné une toupie T reliée à un anneau A par un axe sans frottement (figure 3), il est possible d’étudier le mouvement angulaire de A de la manière suivante : Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle R 1 940 − 3 GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF ___________________________________________________________________________ — on remplace la toupie par une barre infiniment mince, de mêmes moments d’inertie transversaux AT, AT ; — on applique à A le théorème du moment cinétique, en faisant intervenir un couple appliqué supplémentaire, le couple gyroscopique : D B Cg = H∆ ∧ ΩA avec H∆ composante suivant ∆ du moment cinétique deT, ΩA rotation instantanée de A. T Moteurcouple Détecteur d'écart S D C E 2. Gyroscopes 1 axe 2.1 Définition et structure Un gyroscope 1 axe (ou encore : à un degré de liberté) comprend essentiellement (figure 4) : — un boîtier B (case), dont nous représentons la rotation instantanée absolue par Ω B ; — un anneau de cardan C (constituant parfois un carter étanche) relié à B par un axe de cardan S appelé axe de sortie (out-put axis) ; cet axe peut être matérialisé par un arbre de torsion, par des roulements à billes de haute qualité, par des ensembles pivot-pierre, par un palier hydrostatique ; — une toupie T reliée à C par un axe ∆ appelé axe de spin (spin axis), perpendiculaire à S : cet axe peut être matérialisé par des roulements à billes à haute fiabilité, ou par un palier hydrodynamique. Ainsi, par construction, l’axe de la toupie balaie un plan lié au boîtier, perpendiculaire à l’axe de sortie. En général, ce type d’appareil comprend également : — un moteur électrique d’entraînement de la toupie, lui communiquant un moment cinétique H de l’ordre de 10−3 à 10−1 N · m · s, suivant les types d’appareil considérés [Le moment cinétique s’exprime en newtons-mètres-secondes (N · m · s) ou, ce qui est équivalent, en kilogrammes-mètres carrés par seconde (kg · m2/s)] (cf. article [10]) ; — un détecteur d’écart (pick-off, signal generator), généralement inductif, mesurant le décalage angulaire θg de C par rapport à B ; — un moteur-couple (torquer) d’axe S, capable d’appliquer à C un couple de composante Γg suivant S, à laquelle correspond une réaction − Γg appliquée à B. Nous verrons (§ 2.2) que cet appareil présente une sensibilité particulière aux rotations de son boîtier autour de l’axe E, perpendiculaire à S et à ∆, appelé, pour cette raison, axe d’entrée (input-axis). Bien qu’il ne soit défini qu’à une translation près, nous admettrons que cet axe passe par l’intersection de S et de ∆, coïncidant avec les centres de masse du carter et de la toupie. Par définition, E est donc solidaire du carter C ; il n’est pas matérialisé par des paliers. S L'axe d'entrée E est ici perpendiculaire au plan de la figure. (E, S, ∆) est un trièdre direct. Figure 4 – Représentation schématique des éléments essentiels d’un gyroscope 1 axe Les moments principaux d’inertie du carter sont : AC, BC, CC. Les moments principaux d’inertie de la toupie sont : AT, AT, CT. Certains appareils comportent de plus : — un dispositif d’amortissement visqueux (dash-pot, fluide dans lequel baigne un carter étanche), appliquant un couple : − FG θú g S à l’équipage mobile avec θú g dérivée de θg par rapport au temps, FG coefficient de couple de viscosité, faisant passer d’une vitesse angulaire θú g à un couple de viscosité F G θú g ; — un dispositif de rappel élastique (ressort, arbre de torsion, asservissement électronique) appliquant un couple : − KG θ g S à l’équipage mobile, avec KG coefficient de raideur, faisant passer d’une torsion θg à un couple KGθg ; — des détecteurs de température et des éléments de chauffage, destinés à stabiliser la température de l’appareil en cours de fonctionnement. L’appareil est dit au zéro lorsque la position angulaire carter/boîtier est telle que θg = 0. Les positions de E et ∆ définissent alors les axes de zéro E0 et ∆0, liés au boîtier. E0, S, ∆0 forment un trièdre trirectangle direct lié au boîtier ; sauf avis contraire, ce trièdre est supposé principal d’inertie du boîtier ; les moments correspondants sont AB, BB, CB. 2.2 Modes de fonctionnement Nous utiliserons les vecteurs unitaires suivants : E dirigé suivant l’axe d’entrée E, S dirigé suivant l’axe de sortie S, ∆ dirigé suivant l’axe de spin ∆. Les axes S et ∆ doivent être orthogonaux, par construction ; le trièdre (E, S, ∆) doit donc être trirectangle. Sauf indication contraire, nous admettrons qu’il est trièdre principal d’inertie du carter et de la toupie. R 1 940 − 4 Les gyroscopes et gyromètres 1 axe peuvent être classés en utilisant une fonction de transfert valable dans le cadre suivant d’approximations : — appareil parfait (jeux nuls, frottements nuls, éléments parfaitement solides) ; — mouvement angulaire absolu du boîtier limité à un angle θ E Ç 1 rad autour d’un axe E0 fixe dans l’espace absolu ; — mouvement angulaire θg ( C/B )<<1 rad ; — moment cinétique H // ∆ , et de module constant. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle __________________________________________________________________________ GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF Dans ces conditions, l’application du théorème du moment cinétique et du théorème de Beghin (§ 1.3) à l’équipage mobile, avec projection sur S, conduit à la relation suivante : Γ g Ð K G θ g Ð F G θú g + H θú E = I G θúúg avec IG (13) En admettant Γg = 0, nous en déduisons la fonction de transfert suivante : E avec p B R moment d’inertie résultant de (C + T), par rapport à S. θ -----g- θ Γ Ampli i g Mesure gyrométrique T g =0 Hp = -------------------------------------------IG p 2 + FG p + KG ug S Détecteur d'écart Moteurcouple (14) C variable complexe de la transformée de Laplace. 2.2.1 Cas du gyromètre B C Tel qu’il vient d’être décrit, c’est-à-dire avec rappel élastique et amortissement visqueux autour de S, l’appareil se comporte comme un gyromètre (rate gyro), c’est-à-dire un capteur de rotation instantanée absolue. La vitesse mesurée est θú E , ce qui justifie la définition de l’axe d’entrée E (⊥, S, ∆). La fonction de transfert (14) du deuxième ordre met en évidence son gain statique : & = H/FG (15) sa pulsation propre sans amortissement : ω0 = (KG/IG)1/2 Figure 5 – Montage d’un gyroscope 1 axe en gyromètre, par asservissement électronique — par remplacement de la mesure de θg par celle du couple d’asservissement Γg. (17) L’écart θg est généralement limité à des valeurs ± θg max de l’ordre du degré, définissant le débattement de l’équipage mobile; il lui correspond un domaine de mesure : KG ± θú E max = ± ------- θ g max H Le courant i excitant le moteur-couple induit une différence de potentiel V = Ri aux bornes de la résistance étalon R. Ce courant est, par ailleurs, proportionnel au couple g appliqué par le moteur-couple à l'équipage mobile, suivant S ; on a donc, en régime quasi permanent : mesure = V = Ri = K g = K' u E (avec K et K' constantes) (16) son amortissement réduit : FG ζ = --------------------2 IG KG S axe de sortie T toupie u g angle carter/boîtier mesuré boîtier carter (18) Dans une famille donnée d’appareils, les grandeurs suivantes sont généralement fixées : — moment cinétique H ; — moment d’inertie IG ; — débattement θg max. Par contre, la raideur angulaire KG peut être choisie, pour chaque appareil, dans certaines limites. À une augmentation de KG correspondent simultanément : — une augmentation de la bande passante, proportionnellement à K G d’après (16) ; — une augmentation du domaine de mesure, proportionnellement à KG, d’après (18). Le rappel élastique peut être obtenu par voie mécanique ou électrique. ■ Les dispositifs de rappel mécanique sont soumis aux contraintes technologiques suivantes : non-linéarités (notamment hystérésis), limitant la précision de l’appareil, et fragilité, limitant la réduction du domaine de mesure (le domaine de mesure des gyromètres à rappel mécanique descend difficilement au-dessous de 20 °/s). ■ Le rappel par asservissement électronique (figure 5) permet de se libérer de ces contraintes : — par séparation des actions suspension et rappel ; La précision obtenue est alors fonction de la qualité du moteurcouple à aimant permanent, et de la liaison entre boîtier et carter. Le remplacement du rappel mécanique par le rappel électrique permet, en gros, de passer de la classe 10−2 ou 10−3 (l’erreur est au plus de 10−2 ou 10−3 du domaine de mesure) à la classe 10−4 et d’étendre les domaines de mesure, vers le bas, jusqu’à l’ordre de quelques degrés par heure. La mesure du courant i est souvent numérisée, soit par utilisation d’un convertisseur analogique-numérique, soit par excitation impulsionnelle du moteur-couple. Dans ce dernier cas, chaque impulsion transmet une quantité d’électricité Q = ∫ t + ∆t i (τ) dτ t étalonnée avec précision, à laquelle correspond un quantum angulaire ∆θ = ∫θ ú dt E bien défini, pouvant être, par exemple, de l’ordre de quelques secondes d’arc. 2.2.2 Cas du gyromètre intégrateur Le gyromètre intégrateur (rate integrating gyro) (figure 6) est un gyroscope 1 axe ne devant comporter aucun rappel élastique (KG = 0, dans le cas d’un appareil parfait) mais doué d’un fort amortissement visqueux ( Ð F G θúg S ) . Son équipage mobile comporte toujours un carter étanche flottant dans un liquide à haute viscosité, d’où son appellation courante gyro flottant ; la densité du liquide de flottaison est choisie aussi voisine que possible de la densité moyenne de l’équipage mobile, afin de soulager au mieux les Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle R 1 940 − 5 GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF ___________________________________________________________________________ E Toupie D Aimants permanents du moteur-couple Détecteur inductif Préamplificateur Bobinages du moteur-couple E S t tan lot f ps r Co E axe d'entrée S axe de sortie D axe de spin Figure 6 – Exemple de structure d’un gyromètre intégrateur (d’après un document SAGEM) ensembles pivot-pierre matérialisant l’axe de sortie, par un équilibre entre la poussée d’Archimède et le poids apparent de l’équipage mobile. Sa fonction de transfert, déduite de (14), peut être mise sous la forme : H θ g / θ E = ----------------------IG p + FG (19) En régime permanent (θE = Cte), nous avons : θ g = ( H / FG ) θ E ; t ∫θ ú (τ) dτ E 0 d’où cette appellation de gyromètre intégrateur consacrée par l’usage. L’appareil se comporte comme un système du premier ordre, de gain statique : H & = ------- ≈ 1 ,5 à 6 FG (20) et de constante de temps : IG τ g = ------- ≈ 1 à 6 ms FG (21) IG est de l’ordre de quelques dizaines de grammes-centimètres carrés. L’écart θg est limité à des valeurs ± θg max de l’ordre du degré, imposant par là même un domaine de mesure égal à ± θg max / &. Les premiers gyromètres intégrateurs ont été réalisés au Massachusetts Institute of Technology (MIT) sous l’impulsion de Ch. S. Draper, au cours des années cinquante ; ils furent parmi les premiers gyroscopes présentant une dérive aléatoire de l’ordre du centième de degré par heure à moyen terme, performance autorisant leur utilisation dans une centrale de localisation inertielle pour avion. Les dérives aléatoires des appareils actuels s’étagent depuis le degré par heure à court terme (quelques minutes), jusqu’à l’ordre du dix-millième de degré par heure, à long terme (plusieurs semaines). R 1 940 − 6 2.2.3 Cas du gyroscope intégrateur Le gyroscope intégrateur (integrating gyro, unrestrained gyro) est un gyroscope 1 axe ne devant pas comporter de rappel élastique ni d’amortissement ; dans le cas d’un appareil parfait, on doit donc avoir : KG = 0 et FG = 0. l’appareil mesure donc directement θE = Ils sont utilisés dans les centrales inertielles d’attitude ou de localisation pour missiles, avions, sous-marins ; ils comportent également de nombreuses applications spatiales. Ces conditions peuvent être approximativement vérifiées par des appareils dont l’axe de sortie est matérialisé : — par des roulements à billes de haute qualité ; — par un palier hydrostatique. Dans ces conditions, la fonction de transfert (14) se réduit à : θg H ------ = --------θE IG p En régime permanent (θE = Cte) nous avons : H θ g ( t ) = θ 0 + ----IG t ∫θ E(τ) dτ 0 La mesure θg est donc fonction de l’intégrale de la rotation θE du boîtier autour de l’axe d’entrée. Cette fonction d’intégration joue un rôle important (contrôle intégral) dans la dynamique des asservissements de stabilisation utilisant ce type d’appareil comme élément détecteur. 3. Gyroscopes à deux degrés de liberté 3.1 Définition et structure Nous appelons gyroscope à deux degrés de liberté (two-degrees of freedom gyroscope) ou gyroscope libre (free gyroscope) un appareil possédant (figure 7) : Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle __________________________________________________________________________ GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF D interdite (∆ // axe E de cardan extérieur), faisant perdre un degré de liberté à la toupie, dans son mouvement par rapport au boîtier. b) Gyroscopes pour lesquels ce domaine est très petit, par exemple de l’ordre de 1° x 1° [≈ (π/180)2 stéradian] ; se trouvent dans ce cas les gyroscopes à suspension accordée (figure 8 b) et certains gyroscopes à suspension fluide. Ces appareils sont utilisés, en particulier, dans les directionnels et les horizons gyroscopiques classiques. c) Gyroscopes pour lesquels la liberté ∆/B est totale ; se trouvent dans ce cas les gyroscopes à toupie quasi sphérique et à suspension électrique (figure 8 c). L’ensemble des électrodes et de l’électronique assure à la fois la suspension de la toupie et la détection de son axe de rotation ([5] chapitre 8, § 1). Dans tous les cas, la liaison entre boîtier et toupie est étudiée pour minimiser l’incertitude du moment des forces appliquées à la toupie (perpendiculairement à son axe ∆), afin que le mouvement angulaire absolu de ∆ soit connu le mieux possible, conformément au théorème du moment cinétique. Les gyroscopes à deux degrés de liberté comportent de plus, généralement : — des moteurs-couples permettant d’appliquer à la toupie des couples bien connus, lui imposant une précession bien définie, dans l’espace absolu ; — un ou plusieurs dispositifs amortisseurs. Z B DEX O DEY MCY MCX Ligne d'action du moteur-couple X DEX , DEY détecteurs d'écart Ligne d'action du moteur-couple Y MCX , MCY moteurs-couples Figure 7 – Gyroscope à deux degrés de liberté — un boîtier B, auquel est toujours associé un système détecteur d’écart (pick-off ) définissant l’axe de zéro Z de l’appareil, lié à B ; par définition, Z est la direction de l’axe de toupie ∆ lorsque s’annulent les signaux du système détecteur d’écart ; — une suspension de toupie ayant pour but de la contraindre à tourner autour d’un point fixe O lié au boîtier (centre de rotation de la toupie), tout en lui laissant une liberté angulaire suffisante pour que ∆ soit susceptible de s’écarter de Z dans un angle solide l’entourant complètement ; — un moteur-toupie, presque toujours électrique, permettant de lui communiquer un moment cinétique convenable (10−3 à 10−1 N · m · s) ; la période de démarrage, suivant les types d’appareil, peut durer d’une fraction de seconde à quelques heures. 3.2 Gyroscope à suspension élastique compensée (gyroscope SEC) La toupie d’un tel gyroscope (figure 9) est reliée au boîtier de l’appareil par un joint de Hooke, composé d’un anneau intermédiaire et de deux barres de torsion encastrées à chacune de leurs extrémités (figure 8 b) ; il s’agit donc d’une liaison 2 axes à faible débattement angulaire (de l’ordre du degré). L’angle solide accessible à ∆, dans un repère lié au boîtier, est très largement fonction du type d’appareil considéré (figure 8). a) Gyroscopes pour lesquels la liberté ∆/B est seulement limitée par une zone interdite relativement peu étendue. C’est le cas des appareils dont la toupie est reliée au boîtier par une articulation comprenant deux axes et deux anneaux de cardan (figure 8 a) ; en effet, ces gyroscopes ne doivent pas se trouver en configuration D A a D Z Barres de torsion T B Aint Aext T Aint Aext A B T • le lecteur appréciera le jeu de mots entre notre « gyroscope SEC » et le « dry gyro » de la littérature anglo-saxonne, représentant un capteur sans liquide de flottaison (c’est bien le cas du gyroscope à suspension compensée) ; • cet appareil est également appelé « Gyroscope à suspension dynamiquement accordée ». E T B Nota : anneau intérieur anneau extérieur anneau intermédiaire boîtier toupie gyroscope 2 axes classique E D configuration canonique E//D configuration interdite Moteur d'entraînement Électronique d'asservissement B E axe de cardan extérieur Z axe de zéro ∆ axe de la toupie b gyroscope à suspension accordée c gyroscope à suspension électrique Figure 8 – Modes de suspension de toupie Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle R 1 940 − 7 GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF ___________________________________________________________________________ Joint flexible réalisation délicate (car les deux transmissions doivent être indépendantes), permet : Capot — d’effectuer une compensation de raideur à chaque instant (et non pas en moyenne sur chaque tour) ; Volant — de limiter la sensibilité de l’appareil aux oscillations angulaires de fréquence double de la vitesse de rotation de la toupie ; Moteur-couple — d’améliorer la résistance globale de la charnière aux accélérations linéaires du boîtier (on appelle charnière l’ensemble formé par l’anneau intermédiaire et les deux barres de torsion). Détecteur Le moteur synchrone d’entraînement est placé à l’extérieur de l’élément sensible (toupie + charnière) ; cette disposition présente les avantages importants suivants. Stator du moteur Arbre moteur Rotor du moteur Roulement Figure 9 – Gyroscope SAGEM à suspension élastique compensée L’axe du moteur matérialise l’axe de zéro Z du gyroscope. Supposons que l’appareil soit placé dans les conditions suivantes : — boîtier inertiel (sa rotation instantanée absolue est nulle) ; — toupie en rotation (ω rad/s) autour de son axe ∆, ce dernier restant sensiblement inertiel ; — ensemble parfaitement équilibré, sans interaction aérodynamique boîtier-toupie. Il se produit alors les deux phénomènes suivants. Rappel élastique de ∆ vers Z, sous l’action des barres de torsion encastrées : il s’agit là d’une raideur en phase tendant à faire précessionner ∆ autour de Z. ● Mouvement de dandinement de l’anneau intermédiaire, nécessaire pour conserver les conditions : boîtier inertiel et axe de toupie sensiblement inertiel ; les seules déformations envisagées ont lieu au niveau des barres de torsion. À ce mouvement angulaire de l’anneau correspondent des couples d’inertie dont une partie est appliquée à la toupie. L’expérience et le calcul ([5], chapitre 6) montrent qu’il s’agit là d’une raideur dont la valeur moyenne, au cours de chaque révolution de la toupie, est égale à : ● CA Ð A A Ð ------- ω 2 = Ð I Q ω 2 2 avec AA et CA IQ respectivement moments d’inertie de l’anneau suivant les axes principaux d’inertie perpendiculaire à Z et parallèle à Z, le gyroscope étant au zéro, CA ∆ - moment d’inertie équatorial de l’anneau. = A A Ð -----2 Le principe de fonctionnement du gyroscope à suspension accordée consiste à réaliser une exacte compensation entre la raideur statique négative − K, due aux barres de torsion, et la raideur dynamique moyenne positive, due à l’inertie de l’anneau intermédiaire. Cela se traduit par la condition de compensation ou d’accord (tuning) suivante : a) Il est possible de surdimensionner et de lubrifier convenablement les roulements à billes matérialisant les paliers moteur, ce qui confère à l’appareil une bonne fiabilité et une longue durée de vie. b) Les défauts des roulements à billes, et leur déformation due à une accélération, ont une moins grande influence sur les performances de l’appareil. En particulier, en cas de déformation des roulements, c’est l’ensemble charnière + toupie qui va se trouver décalé par rapport au boîtier, et non pas le centre de masse de la toupie par rapport à son centre de suspension ; il n’y a donc pas apparition de balourd. Les roulements doivent cependant être choisis de la plus haute qualité, notamment pour des appareils de classe inertielle (dérives de 0,1 à 0,001 °/h). c) L’équilibre thermique de l’élément sensible est relativement peu perturbé par le dégagement de chaleur du moteur d’entraînement de la toupie. Néanmoins, l’obtention de la qualité inertielle implique une stabilisation de la température, comme dans le cas des gyromètres intégrateurs (§ 2.2.2). 4. Performances des gyroscopes et gyromètres La qualité d’un gyroscope se caractérise par sa dérive ; il s’agit d’une grandeur homogène à une vitesse de rotation, numériquement égale au quotient de l’incertitude de couple appliqué à la toupie, par son moment cinétique. Dans le cas d’un gyroscope à deux degrés de liberté, cette dérive peut effectivement être observée au niveau de l’axe de la toupie. Dans le cas d’un gyroscope 1 axe, l’observation de cette dérive peut être effectuée : — en cherchant à stabiliser une plate-forme avec le gyroscope en question ; on montre alors que la dérive de la plate-forme, autour de l’axe d’entrée du gyroscope, est égale à la dérive du gyroscope, telle qu’elle vient d’être définie ; CA K = A A Ð ------- ω 2 = I Q ω 2 2 — en montant l’appareil en gyromètre (figure 5) ; on montre alors que la dérive est opposée à l’erreur de mesure (le changement de signe est simplement dû aux conventions adoptées). Cette relation impose exactement ω, en fonction de K et de IQ. Un perfectionnement consiste à relier la toupie à l’axe moteur par deux ensembles (anneau + barres), de même centre de rotation, mais décalés de 90° autour de ∆, l’un par rapport à l’autre. Ce montage, de Cette dérive peut être due à un grand nombre de phénomènes physiques : déséquilibre (statique, dynamique) de l’équipage mobile, action des fils d’amenée de courant, d’un champ magnétique résiduel, etc. R 1 940 − 8 Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle __________________________________________________________________________ GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF Tableau 1 – Performances des gyroscopes et gyromètres Dérive (°/h) Durée d’utilisation 100 Mission pilotage automatique de tous véhicules (bâtiments marins, avions, fusées) stabilisation de véhicules : généralement sans compensation 10 quelques minutes à quelques heures 1 quelques minutes 10−1 10 à 20 min 10−2 quelques heures 10−3 1à2h 10−4 quelques semaines 10−5 quelques années directionnels (avions) horizons artificiels (avions) gyroscopes d’attitude (avions et fusées) guidage des missiles tactiques guidage des missiles stratégiques navigation à bord des avions chercheurs de nord (topographie, artillerie) navigation marine pilotage des satellites Les ordres de grandeur rencontrés, très variables, sont rassemblés dans le tableau 1. 5. Exemples d’appareils Les performances indiquées ci-après doivent être considérées comme des ordres de grandeur ; en effet, la précision réelle des capteurs est largement fonction des conditions d’utilisation. 5.1 Gyromètre SFIM, GR-G5 Il s’agit d’un gyromètre 1 axe de pilotage, dont l’axe de sortie est matérialisé par un arbre de torsion fournissant également le rappel élastique ; la lecture est effectuée par l’intermédiaire de l’angle θg (§ 2.1). L’amortissement, compensé en température, est obtenu par action d’un liquide visqueux. Caractéristiques (tableau 2). Moteur synchrone : 12 000 à 48 000 tr/min. Temps de lancement : 30 s (peut descendre à 1,2 s). Capteur inductif : 400 à 25 000 Hz. Masse : < 120 g. Longueur : 54,7 mm. Diamètre : 23,8 mm. Tableau 2 – Caractéristiques du gyromètre SFIM GR-G5 Domaine de mesure DM (°/s) Fréquence propre (Hz) Erreur de balourd (°/s par g) Résolution 20 14 0,03 0,01 60 26 0,05 0,01 200 50 0,1 0,05 (°/s) 360 65 0,1 0,05 1 000 76 0,2 1 Cet appareil, fabriqué sous licence Northrop, est utilisé comme appareil de pilotage à bord du lanceur de satellites ARIANE. 5.2 Gyromètre SEXTANT, type J 118 Il s’agit d’un gyromètre asservi de classe de performances 0,5 % ; les pièces principales sont en plastique chargé de fibre de verre ; l’amortissement de l’équipage mobile est obtenu par voie électronique ; le filtre de sortie procure une réponse du 2e ordre, avec une bande passante ajustable jusqu’à 300 Hz. Le mouvement angulaire de l’équipage mobile par rapport au boîtier est mesuré par voie capacitive. Dimensions : boîtier cylindrique avec ∅ = 38 mm et l = 54 mm. Masse : 115 g. Température de fonctionnement : − 40 à + 80 °C Température de stockage : − 55 à + 90 °C Domaine de mesure : DM = ± 20 °/s à ± 1 000 °/s. Moment cinétique : 3 x 10−3 N · m · s (si DM < 500 ° /s ). 1,5 x 10−3 N · m · s (si DM > 500 ° /s ). Amplitude du signal de sortie : ± 5 V (± 3 %). Erreur de zéro à la température nominale : < 10 mV. Hystérésis : ± 5 mV. 5.3 Gyroscope SAGEM GSL 82, à suspension élastique compensée Le GSL 82 est utilisé, dans ses diverses variantes, pour le pilotage d’engins tactiques et d’avions d’arme, ainsi que pour la stabilisation des lignes de tir ou de visée sur tous types de porteurs. Dimensions : l = 39 mm ∅ = 31 mm. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle R 1 940 − 9 GYROSCOPES ET GYROMÈTRES MÉCANIQUES AVEC ÉLÉMENT ROTATIF ___________________________________________________________________________ Masse : 107 à 115 g, en fonction du modèle de la toupie. Domaine de mesure : ± 540 °/s. Dérive de jour à jour : 1 à 15 °/h (à 1 σ), en fonction du type d’appareil. • bruit aléatoire 5 °/h B (écart-type), B étant la bande passante adoptée (jusqu’à au moins 300 Hz), exprimée en hertz ; — consommation : 2 W Stabilité à court terme : 0,5 à 7,5 °/h (à 1 σ), en fonction du type d’appareil. Roulement Capot Carter tournant 5.4 Gyromètre asservi miniature SFIM GYCAS Volant Électrodes Roulement Il s’agit d’un appareil d’une conception originale, destiné au pilotage et à la stabilisation (figure 10). La toupie, en forme de disque, a un diamètre de 10 mm et une masse voisine de 0,02 g ; sa vitesse de rotation est de 400 à 800 tr/s, son temps de réaction est 0,3 s ; ses détecteurs angulaires et ses moteurs-couple sont de type électrostatique. Monté en gyromètre, l’appareil présente les caractéristiques suivantes : Axe Électronique interne Corps Moteur Traversée étanche — étendue de mesure : 400 °/s — erreurs : Lame de contact tournant • dérive inférieure à 40 °/h, Figure 10 – Gyromètre miniature SFIM GYCAS Références bibliographiques + historique de la question * étude théorique de la question ∆ comporte des résultats d’essais de laboratoire d comporte des résultats pratiques ou industriels [4] [5] s étude technologique de la question e description d’appareillages ou d’installations [1] [2] [3] BLANCHARD (R.L.). – High accuracy calibration of electrostatic gyrostrapdown navigation system. AIAA G. and C. Conf. 1978. COUSINS (F.W.) et HOLLINGTON (J.L.). – The anatomy of the gyroscope, AGARDograph no 313, (288 + 292) p., 1988 (+, *, ∆). CRAIG (J.G.). – Theory of operation of an elastically supported, tuned gyroscope; IEEE R 1 940 − 10 [6] [7] [8] Trans. on Aerospace and Electronic Systems (USA) mai 1972 p. 280. CRAIG (J.G.). – Dynamically tuned gyros in strapdown systems. AGARD CP 116 Réf. 12. RADIX (J.-C.). – Gyroscopes et gyromètres, 390 p., 1978 Cépaduès Éd. (+, *, ∆, d, s, e). RADIX (J.-C.). – Le gyroscope. Que Sais-Je ? no 1337, 128 p. 1969, PUF (*, e) SORG (H.W.). – From Serson to Draper, two centuries of gyroscopic development. Navigation (USA) 23 no 4 Winter 1976-1977 p. 31324. STIELER (B.) et WINTER (H.). – Gyroscopic Instruments and their Application to flight Testing ; AGARDograph no 160, Vol. 15, 210 p. 1982 (+, *, ∆). [9] WRIGLEY (W.), HOLLISTER (W.M.) et DENHART (W.G.). – Gyroscopic theory, design and instrumentation. 444 p. 1969 MIT Press. Dans les Techniques de l’Ingénieur [10] ALLANO (S.). – Petits moteurs électriques. D 3720, 1995, traité Génie électrique. [11] LÉGER (P.). – Gyroscopes mécaniques vibrants. R 1942, 1999, traité Mesures et Contrôle. [12] RADIX (J.-C.). – Gyromètres optiques. R 1945, 1999, traité Mesures et Contrôle. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Mesures et Contrôle
© Copyright 2026 Paperzz