HPr-
Dqroi^ en
b"ps {À''tc' rnoe
àslsslzot,+
Exercice t (3ottn lrraxlrynu- )
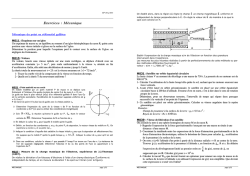
Le référentiel fr, considéré comme l
^
galiléen,
est rapporté au
repère
-+ -+ -)
(O, x, Y, z) '
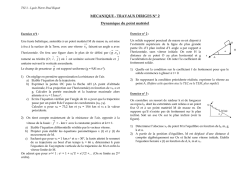
On considère un
fil
inextensible et
sans masse, fixé en O et passant en A
sur une poulie de très
petites
dimensions.
On fixe sur ce fil une masse mt au
point M distant de a du point O, de
sorte que le triangle OAM soit isocèle,
et une masse m2 à l'extrémité tr/ du
fiI.
Voir figure ci-contre.
-+
-+
->
m2
-+
On note OA=ax et g--gy
I'accélération de [a pesanteur.
La position du point
-+
On note
dans le
{
M
estrepérée grâce à
l'angle
0 définidans le plan iOl
par 0
-(O x,OM)
.
-+
l'action du fil sur [a masse m, dans le brin lofvf] et T, l'action du fil sur la masse rnr
brin lMAl.
Le système est à l'équilibre, de sorte que
1-
Exprimer dans fr
Exprimer dans fr l'action
-
3
- Appliquer le théorème
i
est constant.
l'actio, Ë A. la pesanteur sur la masse 2,.
,2
dans m de
0
-+
T2
mr, 0
en fonction de
et g.
de la résultante dynamique à la masse
mr.En déduire l'expression
en fonction de ffi1, t712, 0 et g.
dans fr le moment
4
- Exprimer
5
-
6
- Exprimer dans fr
,irfï>
Déterminer l'expression du moment
le momert
de l'action
ù"fi>
rtr1ir1
Ë
uu point
de l'action
de l'action
i,
i
O enfonction de m, a et 0 .
au point O.
au point
O enfonction de ffi2, a
et0,
7_ Appliquer le théorème du moment dynamique au point O à \a masse mr. En déduire une
condition entre fii1,
t?12
et 0 pour qu'une position d'équilibre existe.
8_ En dédui1e, quand il existe, l'angle d'équilibre 0, en fonction de m, et mr.
Eqt,|}n. a- (,th3o)
L'attention des candidats e§t attirée sur xe fait que la notation prendra
compte du soin, de Ia clartd et
de la rigueur de la rédaction. tr-es candidats sônt priéu o'u..àràer
une importance particulière aux
applications numériques demandées. sn veillant à i'unité et aux
chiffres
*'iriirârlfs
du résulrar.
Formulaire
- Pour tout nombre réer -r
:
cos.r=
l-zsinr{ ; cos, x?2
I+cos2x
;
cos,
r= 3 cos.r + cos 3.r
PROBLEM§ B: UNE BALANCOIRE
[]n enfant faisant de la balançoire $igure 2] est modélisé pâr
rne masse ponctuelle rc située en M et
o par une tige rigide, de masss négtigeable et de longue"r l. r*ïrrr*p
de pesanteur § ,
de norme g, est supposé uniforme. L'angle que fait la tige
de suspension avec la verticale est noté É
{figure 3}. læs vecteurs unitaires fr,, ü0 et û^=ü, hur,telsqu. aefinis
surlafigure 3, ddfinissent
un trièdre orthonormd direct lié à la balançoire.
suspendue en
Figure2: enfantassis
sur sâ balançoire
Figure 3 : schématisation de la balançoire
et repère mobile associé
81'A quelle condition' §ur la durée de I'expdrienceo le
référentiel terrestre peut*il être considdrd
comme gariléen ? on donnera un ordre
de grandeur.
cette condition serâ §upposée être vérifiée
dans toute Ia suife du problème.
82- Dans cette question, tout frottement de Ia
tige sur son axe de rotation et tout frottement
dû à Ia
resistance de tr'air sont négligés.
B2'1'Etablir I'dquation différentielle du mouvement
vérifiée
par
82.1.1- en appliquant le principe fondamentar
de la dynamique
82.1.2- en appliquant Ie théorème de r'énergie
cinétique
0{t}en utilisant 6.ois méthodes
:
;
;
82.1.3' en appliquant Ie théorème du moment
cinétique.
82.2,- En déduire que Ie mouvement est plan.
Dans toute la suite du problème, les mouvements
de Ia balançoire et de l'enfant seront étudiés
dans
le plan vertical de la figure 3.
Bl3- A
quelle conaition l'enfant assis sur Ia balançoire
sera-t-il un oscillateur harmonique ?
Donner I'expression littérale de ra pulsatiûn propr§
6i0 correspondante.
Apnli'p+tio-tr numéri'qqg: l'enfant part d'un aggle
numédques suivantes ; I = 2,5 *, g lû
âa-
30o sans vitesse initiale. Avec les yaleurs
r.s, r"i"rler Ia période ro de I,oscillateur
harnroniqueo ainsi que ra vitesse màximare r,6s
^za
d€ r,enfant.
=
*.r-'ît i'=
B3- L'approximation de I'oscillateur harmonique est ici examinée er considérant les effets non
linéaires. L'enfant part d'un angle Éo posirif sans vitesse initiale.
B3.l- En partant du théorème de l'énergie cinétique, dtudié à la question (82.1.2),
donner
I'expression de d.{ en fonction de 0, 0o et des paramètres caractéristiques du système. En déduire
dt
I'expression de Ia période T(0o) sous forme d'une intégrale en fonction de 0, 0o et des paramètres
caractéristiques du système. On précisera soigneusement les bornes d'intégration. On ne demande
pas de calculer cette intégrale.
Retrouver le résultat de la question 823 dans le cas des petites oscillation,s.
Une intégration numérique permet de dessiner la courbe représentative de la fonction f(dç) cidessous (figure 4). Commenter cette courbe.
r(s)
?
6
§
4
3
Éo
(rad)
Figure 4 : période en fonction de l'angle de départ
B3.Z- posant sin
0=
0
- 03l6,que
d,evienr l'équation différentielle du mouv,ement vérifiée par 0(t) 1
83,3. On cherche, pour l'équation différentielle approchée écrite en 83.2, une solution elle-même
approchée de la forme
:
0=
flocos dJI + ۉocos
83,3.1- En se limitant au premier ordre en
fondamentale alainsi que le terme
r,
3ar où a<< l'
exprimer en fonction de c{b et 0o la pulsation
€'.
833.2- par rapport au mouvement harmonique, la courbe â(r) relative âu mouvement réel a-t-elle
une plus grande ou une plus petite période
83J.3- euelle
BlJ.4-
Êst
?
la pulsation du premier harmonique après le Ïondamental
?
premier ordre,
Dans le cas général où on ne se limiterait pas à des développements au
quelle serait l'allure dü spectre de la solution É(r) obtenu pâr analyse spectrale
84- Au point o s,exercent
rapport à O) est égal à
-
des forces de frotternent sur
C#il.
?
la tige. t,e moment de ces forces (par
où C est une çon§taate positive et ü.
=fr, *fre
.
84.1- Quelle est la dimen:sion de Ia constante C ?
0(t).
B4.Z-Etablir l'équation différentietle à laquelle doit maintenant obéir
inégalité doit satisfaire c pour
84.3- En supposant que l,angle É reste suffisamment petit, à quetle
mouvement oscillatoire dont
un
comme
que [e mouvemgnt àe l'eniant puisse être considéié
?
l'amplitude décrôït avec le temps (mour"ment pseudo-périodique)
ici la pseudo-période
Application nur$érique : considérant cette condition satisfaite, on approxime
initiale' on
u*:,vitesse
8o=
Ir à la période To de la question 82.3. L'enfant part d'un anglg
1T
oscillations. Calculer la
observe que l,amplitude du mouvement est réduite de moitié après 20
82.
valeur de la constante C avec les yaleurs numériques données à la question
B5- L*s frottements (question B4) ont pour conséquence d'amortir le balancement de l'enfant et un
deuxième enfant vient donc aider le premier enfant qui se balancç à maintenir une ûmplitwde
constante en le poussant (figure 5) avec une force horizontale périodique non harmonique dont le
module F(r) est représenté à la figure 6.
F{t}
Ëo
Figure 5 : enfa;rt sur sa balançoire
po,ussé par un autre enfant
N.B. :
il
Figure 6 : profil de laforce appliquée à l'enfant
sur sa balançoire en fonction du temps
pour répondre aux
n'est pas nécessaire d'effectuer une analyse en série de Fourier de F(t)
questions 85.1, 85.2 et 85.3.
sa poussée sur
85.1- A quel moment et à quelle fréquence I'enfant pousseur doit-il appliquer
possible-].
plus
efficace
Qu" vaut donc la
l,enfant de la balançoire pour qu* ron action soit la
possible ? (on
plus
efficace
la
période I de la force f(r) pour que l'action de I'enfant pousseur soit
*uppor*ra les frottements faibles dans cette question et dans les suivantes)'
6 et l'angle 0(t)'
BS.2- Représenter sur un même graphe [a fonction F(r) de ta figure
de C, o la
BS.l- Déterminer la puissance moyenne dissipée par les frottement§ en fonction
par I'enfant
fourni
le
travail
pulsation du mouv"*rnt et 0ol'amplitude du mouvement. En déduire
différents
des
(les valeurs numériques
pousseur après 20 oscillations de l'enfant se balançant
pararnètresiont toujours ceux donnés'à la question B2).
B6- L'enfant se balançant décide de monter sur une âutre balançoire, pour laquelle les frottements
sont considérés ro**à toüalement négligeables. Alors que l'enfant se balance, il décide de monter
de plus en plus haut. Pour cela, il effectue les mouvements suivants au cours des phases
oscillatoires successives, 1,2, ...n :
(de A à B) ;
- lorsque la balançoire passe par la position verticale,l'enfant accroupi se relève
- de B à G-r,l'enfant re§te debout ;
- lorsque la balançoire atteint dn-r, son amplitude d'oscillation maximale, lnenfant s'accroupit (de
Cn-r à Dn-r) i
- de Dn-1 à A,l'enfant reste accroupi
;
.
(de A à n);
- lorsque la balançoire repasse par la position verticale,l'enfant accroupi se relève
- de B à G, I'enfant reste debout ;
- lorsque la balançoire atteint în,sa nouvelle amplifude d'oscillation maximalo, I'enfant s'accroupit
à nouveau (de Cr à D") ;
- de Dn à A,l'enfant reste accrouPi.
gravité de I'enfant dans
Sur la figure T sûnt tracées la tràjectoire et quelques positions du centre de
et réciproquement
à
debout
position
accroupie
la
de
passages
Les
le référentiel galiléen lié au sol.
86.1- Descriptioq,qualiatve.
-
36.1.1- Dans un repère lié à la balançoire (c'est-à{ire un repêre lié à la tige de suepension et au
siège de la balançoire), identifier les forces extérieures au sysême.
8,6'1'2- calculer
forces de Coriolis.
sur la portion ABC,D*A Ie trarrail du poids, de la tenaion de la corde et des
wnwtifrwtw
dépan accroupi
l'rnfant
sÊ
relève
l'enfrnt s'aeeroupit
o
ig*
,
I
I
t
C*l
l.B
4-'
Figure 7 : mouvements de l,enffifi
sü
sa balançoire
B'6'1'3- on
admet que le travail des forces internes
à l"enfant est positif lorsqu,il se relève
et
et que cette propriété reste waie a*u
uo-"rrung"ment de référentjel.
I*:Lofft
En tiéduire que le trava.il de la force
**riiog" * t*urif.
ce travait a pour expression ,
_
y"
oarà2, _ oezeX\. Montrer qu,il ra donc
pe.nnertre à la balançoùe de s'élever iUr^toB,
â" plr..r, plus haut.
:
o;\;
852. Modélisation simplifiée de la balançoire
et de l,enfant.
on schématise ra barançoirc et.t'e*art
p"raue_de
à un fil de longueur variable aep"rra_, ""ir","î"
a" lu po.i
iL
862'1- carculer
masse fictive (consrante)
angufaire de repg
""ge
re moment cinélique,
Ç
,
du padule au point
o
r, accrochee
: I = l(O).
dans le référendel galiléen rié au
sol.
w2'2'
Eû appriquqt Ie thôrème du moment cinétique
dans re rdférentier galiléen lié au
sor,
donner I'équation vérifiée par
Ç.
B6'23' En ûohnt 4
les éronmtions successives maximales
(figo-re 7), montr.r la reradon
:
Ju-,t'@)t'ntae =
fiLiJ]]î"plier
o
chacun des membres de r'équation
donnée
à râ qûêsrior B62i par la
8.6.2.4- On note l(d)
-;aa oor, Ln_t {.0 < 0 et I(d) :L pour 0 < 0 < 0,.
trlontrer que les positions angula-ires
extréma.res successives 0n_1 et gn,obéissent
à,une re.ration de
récurence faisant interveni, .i"(?)
et sitr(?).
trf$,*:
déduire les valeurs des positions
angulaires extémales d, aneinres
pa. l,eRfanr sur sa
86.2.6- Si I'enfant démarre sene ütao"o ;hi
^r^ -.--t,
itxrjffi
l,"tr#,T,,ffi ;ïitriî,H:
j'ï"il".;iI ji:i#L';:#î:iïi#J
Prrlotàc
s C2h )
Quelques aspects de la physique des milieux granulaires
Un solide gramrlaire esü un matériau composé de particules soiides discrètes de taiiie typique conr.prise entre 100 et 3 000 Stm, el qui restent le plus souvent en contact les unes avec ies
autres" Cette classe de matériaux cornprend les ciments, les sables, les graviers, les granulaüs,
les cérôales... On s'intéresse dans ce problème à quelques aspects, statiques et dyrramiques, de
la pirysique de ces systèmes qui reste encore assez mal comprise.
Formulaire
-+
N
L'action du solide B sur le solide .4 en contact se décompose en une composatte normale If,
et une composante tangentieile f vérifiant :
p* et
[16
tlftt S p-ll§ll
en l'absence de glissement entre
llfll : pail/ÿll
lorsqu'il y a glissement de  sur B
A et B
sünt appelés coefficients de frotternent respectivernent statique et dynamique et vêrilient
I'inêgalitê:1t4Spr.
Première partie
Hystérêsis de frottement
IJne des difficultês conceptuelles trajeures pour la description d'un système comportant clu
frr-ittement solidc est l'irnpossibitrité de prêvoir les positions d'êquilibre et le bilan des forces à
moins de connaître de façon détaillée l'histoire de la mise en êquilibre. Le but de cette partie est
rf illustrer ce phénomène (rtit rl'hystêrésis) suï un exemple simple.
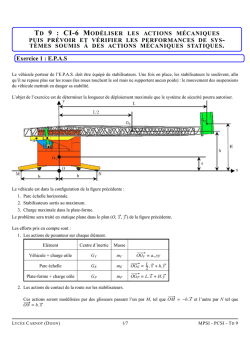
avec une paroi solicle inclinêe d'uu
angle Ë par rapport au pian horizontal et est reliêe à un ressort de raideur k (figure 1). Soit ;l, le
coefficient de frottement statique; on supposerâ, pour sirnplifier que le coefficient de frottement
d5'namique p;r est nul et qu'un frottement rri.squeux permet l'arrêt du mouvernent. On note r la
cléf'ormaüion du ressort (* * ü correspond au ressorü détenrlu). On cherche à déterminer cette
llne brique parallêlêpipêdique de poids P est en contact
rlêformation :r à l'êquilibre en fonction de l'angle â.
Figure
L. I)onner les plages de valeurs possibles de
et
0:
I
r à l'équilibre dans les deux cas extrêmes : 0 :
0
'r12.
2. La paroi est supposée horizontale et le ressort détendu (*o - CI). On incline progressivenrent la paroi, I'angle t variant de û à x l2; on rtote alors 0+ les angles d'inclinaison croissants.
On rlésigne par n{ Ia sêrie cles dêformations du ressort dans les positions successives de nonglissement de la brique.
a) Déterminer l'angle d'inclinaison gf pour
déterminer la nouvelle rraleur d'êquilibre
-
b)
rf
lequel 1e glissement apparalt. Pour cet angle,
en fonction de 0{, P et, Ic.
Ou augmente l'angle d'inclinaison ; un nouveau glissement apparaît pour l'angle
enüre 0l , üT et pr.
0rF
Iitublir la relation
c) Montrer que pour chaque cf, il
existe un intervalle l0{,0T*r[ de non glissement; on
établira la relation de rêcurrence liant di et 0[r. \brs quelle valeur ]irnite tend Ia diffirence
â11
-sI?
3. On effectue maintenant le parcours iuverse en ?artant de la vertica.le, On note
et les positions d'équilibre correspondantes.
9o
et
r.o
les angles successifs de glissement
Etudier comme à la question précêdente la succession des valeurs d'arrêt rr4. Représenter sur un même graphe du plan t0r*) les paliers d'arrêt successifs *f à inclinaison
r; à inclinaison décroissante; on pourra utiliser Ie fait que les points (Êr*,rr*),
(Êr-,rr ), (0&r,*f) et (âi*1 ,r;) se situent sur des courbes simples. On prendra Plk: 0, 1 m
et p, * ûr3. Commenter le résutrtat.
croissante puis
Deuxième partie
Principe de dilatance de Reynolds
En 18?5, Reynolds a énoncé Ie principe suivant : « un matériau granulaire fortement compacté, placé dans une enveloppe flexible, voit invariablement son volrrme augmenter lorsque cette
enveloppe est dêformêe. Si cette enveloppe est inextensible, aucune déformation n'est possible
jusqu'à ce que les forces appliquées brisent I'enveloppe ou fractionnent }e milieu granulaire >>.
Ce comportement est totalement diffêrent de celui d'un solide classique qui voit son volume
diminuer sous l'effet d'une compression.
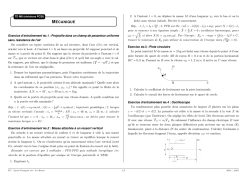
Pour illustrer ce principe et ses limites? oïr considère la dêformation d.'un cornposant élêmentaire d'un matériau granulaire bidimensionnel, simplifiê à l'extrême, constituê de quatre disques
de rayon R placés comme indiqué sur la figure 2. Leur poids n'a pas à être pris en compte dans
toute cette deuxième partie.
Ftgure 2
1. sous l'action de forces de compression verticales indiquées par les flèches sur la figure 2,
on 6éforme Ie losange élêmentaire reliant le centre des quatre disques qui derneurent toujours en
contact.
a) Soielt ,Sr l'aire totale occupêe par l'objet et L, et ^L6 les longueurs re§psctives
diagonales verticale et horizontale du losange. Calculer ,5t
.t, fonction
de .R, Lo et Ln.
des
b) N{ontrer.. que Ia partie variable de }taire
ASiü-
couverüe définie par 4,91
-
St
-
SrRz s,écrit
:
rr^O\re
c) Préciser
bornes physiques de I'intervalle de variation de -tyr. Ttacer le graphe de la
-ies
fonction L&|4R2 en fonction de la variable réduite L6IZR.
d) Montrer que l'on peut distinguer sur ce graphe deux rêgimes de réBonse à une nrodification des forces de compression : un « régime de Reynolds >> où le matêriau suit le principe
de dilatance de Reynolds et un << rêgime solide >> où il a Ie comportement d'un solide classique.
Donner la vaieur de L6lLï correspondant à la transition entre ces deux rêgimes.
2. Soit /, l'intensitê de la force de compression verticale exercée sur chacun des deux disques
de l'axe vertical du losange a,u cours de la dêformation. L'équilibre est maintenant a^ssurê par
I'existence de deux parois verticales fixes déformables en contact av€c chacun des deux disques
de l'axe horizontal (figure 2). On suppose dans cette^question que le «rntact entre disques est
sans frottement.
a) Montrer que les deux disques de I'axe horizontal exercent sur chacune des parois une
force horizontale d'intensitê fi, vérifiant ; fn : K l, où .[( esü appelé coefficient de redirection
rJes
contraiutes. Exprimer
b) Donner la valeur
dantàÉ*60'.
K en fonction
numérique de
de l'angle B (figure 2).
K pour un empilement
üriangulaire cûmpact correspCIl-
3. On suppose maintenant qu'il existe entre les disques un frottement caractérisé par
coefficient statique
le
pr.r.
Partant d'une situation sans contrainte, on exerce de façon symétrique les forces de compression d'intensitê /r. Soit 0 l'angle obtenu. Le système étant en êquilibre dans une configuration
caractérisée par l'angle 0,on supprime les fôrces de compression verticales (,fr:0). Les parois
verticaies déformées exercent toujours deux forces horizontales opposées, d'intensi#t fn.
a) A quelle condition sur 0 le système reste-t-il « bloqué
lihre
>>
dans cette configuration d'équi-
?
b)
Préciser numériquement cette condition pour p.s : 0,9.
On dit qu'un matêriau granulaire est « compacté >> Iorsque les particules solides qui le
constituent exercent les unes sur les autres des forces de compression et lorsque les forces de
frottement internes maintiennent bioquées ces particules.
© Copyright 2026 Paperzz