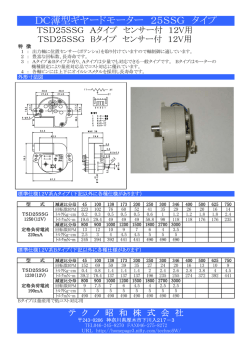
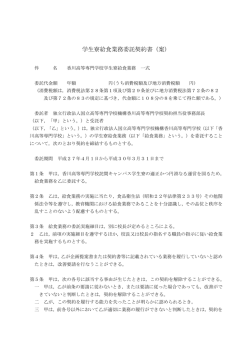
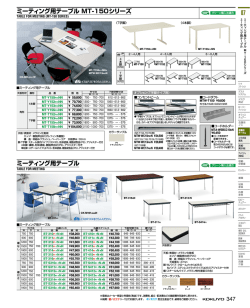
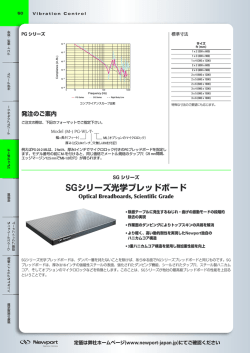
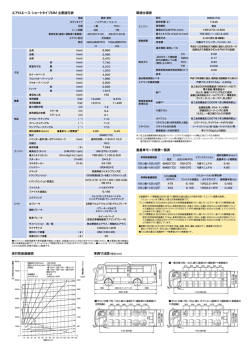
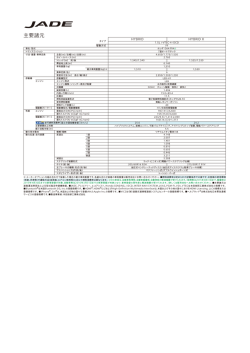
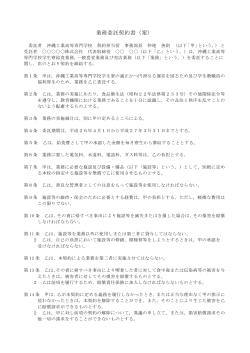
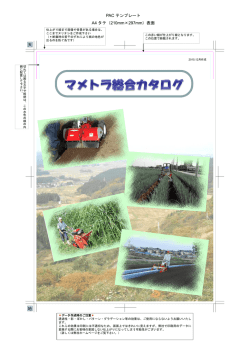
ブラシつき直流機の慣性モーメントの一測定法(1) 渋谷睦夫*板谷憲治*井上孝浩**太田泰夫*** One Methed for Measuring Moment of lnertia ofDC Machine with Brush ( 1 ) Mutsuo SHIBUTANI“ Kenj i ITAYA* Takahiro INOUE““ Yasuo OTA“““ This paper suggests one method for measuring the moment of inertia ofrotary machines with brushes. They are gotten by measuring mechanical losses on no load test and stopping times on braking test. These deal with four cases of a motor, a motor−driving motor−generator, a generator, and a generator−driving generator−motor. Key words : moment of inertia ,dc machine, brush 1.はじめに J’(dω/dt)十(Tb/ω)ω=0 構造の簡単な回転体の慣性モーメントはその寸法 や質量によって比較的容易に計算することができる。 しかし、電動機の回転子のように構造がやや複雑で、 (1) 制動を開始する時の角速度をCD.1とすると、角速 度ω(rad/s)は次式のように求まる。 材質が均一でない場合は計算が複雑になるので実測 することが多い。その方法として、回転子単体で斜 面を転がす方法や回転軸に重りをつけて落下する方 cD = co,一 (Tb/J)t 法があるが、!)前者は回転子を電動機から取り出さ T= O (2) T, なければならないし、後者は落下距離を確保しなけ ればならない。 ω五 そこで、ブラシつき直流機のようなブラシと整流 子との間に比較的大きな摩擦抵抗をもった回転子の 場合、そのブラシの機械的制動作用を利用して、比 較的簡単に慣性モーメントを測定する方法を提案す る。 図1 機械的制動時の等価回路 2.機械的制動時の減速特性 回転している電動機を電源から切り離し、一定の 制動トルクで機械的に制動する場合、電動機は短時 間で停止するが、その回転数は直線的に減少する。 図2はこの様子を示したもので、制動開始前の 角速度ω、からTb/Jの傾きで、直線的に変化する減 図1はその時の等価回路で電動機の慣性モーメント 電動機が停止するまでの経過時間をt。(s)とする をJ(kgm 2),制動トルクをTb(Nm)とすると次式が成 と、慣性モーメントJは次式によって求めることが り立つ。 できる。 速特性を示している。 」 = Tb×t./ co i 原稿受付 平成12年8,月25目 *電気工学科 **電気工学科卒業生、現在(株)NTTファシリティーズ ***電気工学科卒業生、現在(株)日立エンジニアリングサービス 一61一 (3) 津:山高専紀要第42号 (2000) ほぼ直線的に変化しており、機械的制動特性を示し ている。 ﹂ ゙奢] [・, ω 3 120 >100 苗80 to 鯉60 覆40 蝦20 経過時間t[sec] 図2 機械的制動時の減速特性 0 3.ブラシつき電動機の慣性モーメントの求め方 01 23456789 10 経過時間t(s) 3.1 無負荷試験 直流電動機を無負荷で運転し、その時の電圧V(V)、 電流1(A)、回転数N(rpm)を測定する。図3の角速 図4 供試電動機の減速特性(1800rpm, t。=・:10s) 度ω(rad/s)はω=2πN/60から計算する。 よって減速特性から求めた停止時間t。と無:負荷試 験から(4)式によって求めたブラシ摩擦トルクTbを (3)式に代入して慣性モーメントJが求まる。 1 ・魚棚 v 3,3 ブラシ損と銅損 ブラシに電流を流すと、ブラシと整流子の接触面 での電圧降下によってブラシ損を生じる。 図3において界磁を無励磁にし、電動機を回転さ せないようにして電圧降下を測定する。図5は供試 電動機の例で、ブラシと整流子の接触面での電圧降 下は、電流1;0での値0.667Vなのでブラシ損は 0.6671(W)となる。またその傾きは電機子巻線抵抗 図3 直流電動機の無負荷試験 無負荷損は次式で表される。ただし、電機子巻線 (補極巻線つき)の抵抗値を示し、Ra=0.763Ωなので 抵抗をRa(Ω)とする。 銅損0,76312(W)が求まる。 i1 無負荷損VI二機械損Pm十銅損12Ra +ブラシ損Pb+鉄損Pi(w) 14 ブラシつき直流電動機の機械損Pmはほとんどブラ シによる摩擦トルクとして費やされると考えてよい ので、摩擦トルクTb(Nm)は次式によって求めること ができる。 Tb = Pm/ co @12 i10>ヲ8 y=Q7632x+Q6665 o6 ?S (4) 3.2 ブラシの減速特性試験 直流電動機の無負荷試験に引き続いて、回転して いる電動機を電源から切り離し減速試験をする。ブ ラシはある圧力で整流子と接触しているので、これ が機械的制動として働き、ほぼ直線的に減速する。 図4は供試電動機を1800rpmで運転し、電源から切り 離した時の減速特性である。少しカーブしているが、 一62一 @2 @0 0 5 10 15 20 @ 霞流1(A) 図5 供試電動機停止時での電圧降下 ブラシつき直流機の慣性モーメントの一測定法(1) 渋谷・板谷・井上・太田 ま測定したので短くなっているが、結果的に摩擦トルク ブラシ損はLOII(W),銅損は1.2812(W)である。 Tbの誤差を打ち消す効果がある。 12 図6は供試発電機の無励磁での電圧降下特性で、 表1と表2の各5回のto×Tbを平均し、これより 求めた慣性モーメントとその誤差率を表3に示す。 慣性モーメントの真値はメーカの資料によるもので、 電動機は0.02075kgm2、発電機は0.02025kgm2である。1 ε据 y=t28x+1.OO89 したがって電動機発電機連結の場合は0.041kgm2で it. e ある。 剛 表1 摩擦トルクと停止下問(電動機単独) 言 10 5 o 15 回転数 電圧 電流 停止 機械損 摩擦トルク to×Tb m(rpm) u(V) P(A) 條ヤ om(W) sb(Nm) iNms) 狽潤iS) 電流1(A) 300 図6 供試発電機停止時での電圧降下 4.測定結果 慣性モメントの測定は下記の4種類について行っ 600 た。 (1)電動機単独 (2)電動機駆動発電機連結 (3)発電機単独(発電機を電動機として駆動) (4)発電機駆動電動機連結(発電機を電動機として 900 駆動) 供試直流機の定格はそれぞれ次の通りである。 23.1 0.60 1.66 13.2 0,420 0,697 22.8 0.58 1.89 12.6 0,400 0,757 2t8 0.58 t85 12.0 0,382 0,707 21.8 α58 1.92 12.0 0,382 0,733 22.0 0.58 1.93 12.1 0,386 0,744 41.7 0.62 3.32 25.1 0,400 1,329 40.6 0.60 3.45 23.7 0,377 40.1 0.60 3.56 23.4 0,372 t300 t325 4α1 0.61 3.58 23.8 0,378 1,354 40.0 0.61 3.58 23.7 α377 1,351 60.4 0.65 5.06 38.5 0,409 2,067 59.8 0.64 5.21 37.5 0,398 2,075 58.9 0.63 5.18 36.4 0,386 2,000 58.8 0.64 5.37 36.9 α391 2」02 58.4 0.63 5.38 36.1 0,383 2,059 (1)直流電動機iIOOV,1.5kW,1800!pm,2極 80.3 0.67 6.70 53.0 0,422 2,826 (2)直流発電機 100V, lkW,1800rpm,2極 78.7 0.66 6.89 5t2 0,407 2,806 まず電動機を単独で運転し、無負荷試験と減速特 性試験を回転数300rpmから定格回転数1800rpmま で300rpm刻みで行い、これを5回繰り返した。つ いで電動機に発電機を連結して同じ測定を行った。 更に発電機を電動機として駆動し、単独と連結の場 1200 1500 合について測定を行った。 表1は電動機単独、表2は電動機駆動発電機連結 の測定結果である。各回転回において停止時間にか なりのばらつきがみられるが、これはブラシと整流 子との摩擦抵抗が変化するためである。全体的にみ て、回転の回を重ねるにつれて摩擦抵抗すなわち摩 擦トルクTbは小さくなるのに対し、停止時間t。は長 くなる。しかし両者はほぼ反比例するので、両者の 1800 積t。×Tbのばらつきは少なくなり、慣性モーメント の測定にあまり影響しない。 図7に電動機単独の場合の停止時間toと摩擦トルク Tbの関係を示す。 なお今回は鉄損を分離しなかったので、摩擦トル クTbは鉄損分を含んだ値である。また停止時間toは 界磁を切って測定すべきところを、界磁をかけたま 一63一 78.0 0.65 6.92 49.9 0,397 2,750 78D 0.65 7.01 49.9 0,397 2,786 77.6 0.65 7.08 49.7 0,395 2,799 98.7 0.70 8.28 68.2 0,434 3,598 97.4 0.69 8.36 66.4 0,423 3,533 96.7 0.69 8.47 65.9 0,420 3,553 96.5 0.69 8.49 65.8 0,419 3,554 96.0 0.69 8.69 65.4 0,416 3,619 116 0.72 9.74 82.7 0,439 4,274 115 0.72 9.91 82」 0,435 4,315 115 0.71 9.85 80.5 0,427 4,207 1董4 0.72 9.79 8t1 0,430 4,214 114 0.71 10.0 79.7 0,423 4,234 津山高専紀要第42号 (2000) 表2 摩擦トルクと停止時間(電動機駆動発電機連結) e : lsoorpm A : 1800rpm 回転数 電圧 電流 停止 機械損 摩擦トル to×Tb 堰iA) 條ヤ om(W) NTb(Nm) iNms) O.445 狽潤is) O.44 21.9 1.05 2.00 21.5 0,683 t37 曾 21.5 LO6 2.53 21.2 0,676 1.71 2t3 1.06 2.28 21.0 0,669 翫53 21」 1.04 2.30 20.4 0,650 1.50 41.9 t10 3.93 44.4 0,707 2.78 43.8 0,698 2.76 40.3 1」2 3.98 43.4 0,691 2.75 39.9 1.11 3.94 42.6 α678 2.67 39.7 1.09 4.06 41.6 0,663 2.69 60.5 1.14 5.59 67.2 0,713 3.99 59.6 1.15 5.87 66.8 0,708 4.16 58.8 t16 5.63 66.4 0,705 3.97 58.3 1.17 5.73 66.4 0,704 4.04 58」 1.13 6.01 63.9 0,678 4.08 79.2 1.21 7.48 93.9 0,747 5.59 77.9 1.21 7.40 92.3 0,735 5.44 77.1 1.22 7.63 92.1 0,733 5.59 76.7 t21 7.53 90.9 0,723 5.45 76.2 1.16 7.92 86.6 0,689 5.46 43 _.⊥_■ q 4 25 麟。’42 0.415 ● 鼈鼈鼇 n一一『} 喜 @ @き ● § 3.95 ● @き..一....一1 1.11 z. O.435 曼 41.0 v 一壕垂 OAI i 8 8.5 9 9.5 10 10. 5 1 停止時間to (S) 図7 停止時間と摩擦トルクの関係(電動機単独) 表3 各回丁数における慣性モーメントと誤差率 97.8 1.24 9.15 119 0,759 6.95 96.4 1.26 9.21 119 0,760 7.00 95.5 t27 9.18 119 0,759 6.97 95.1 1.25 9.32 117 0,744 6.93 94.8 t24 9.58 7.05 1.33 10.6 116 153 0,736 117 0,8れ 8.58 115 1.33 10.7 151 0,799 8.58 114 10.8 150 @単独 1.33 0,795 8.61 113 1.32 10.9 147 0,782 8.53 i;0。02075 @(Kg㎡) 判3 1.31 11.0 146 0,774 8.53 回転数 慣性 誤差 iNms) a[メン ス均値 i(Kg㎡) 0,728 0.0232 11.2 1.33 0.0212 2.2 900 1200 2.06 0.0219 5.4 2.79 0.0222 7.1 1500 1800 3.57 0.0227 9.6 4.25 α0225 8.6 1.48 0.0471 14.9 2.73 0.0434 6.0 m(rpm) 電動機 to×Tb ヲ︵%︶ 1800 1.29 ▲﹂ . − 一 1500 0,703 ▲十 1200 22.1 ヘム≧ 900 1.83 ﹄↑ 600 1.05 α 300 22.5 ⋮ m(rpm) u(V) 300 600 電動機駆 300 600 ョ発電機 @連結 900 1200 4.05 0.0430 4.8 5.51 0.0438 6.9 i=0.0410 1500 1800 6.98 0.0444 84 8.57 0.0454 10.8 iKg㎡) 図8に発電機を電動機として駆動した場合も含め た慣性モーメントの測定値と真値を示す。(a)は電動 機単独、(b)は電動機駆動発電機連結、(c)は発電機 単独、(d)は発電機駆動電動機連結の場合である。 回転数が上がるにつれて、測定値が少し大きくなる のは鉄損の影響が大きくなるためと思われる。これ は、鉄損は回転数が高くなるほど多く発生するから である。 一64一 ブラシつき直流機の慣性モーメントの一測定法(1) 渋谷・板谷・井上・太田 ー ﹂⊥ ハハ 添凶 附−申鯉躯 ■◆ ﹁ヨ :慣性モーメントの真値[kg・m2] :慣性モーメントの計算値[kg・m2] f糎α・15 コ ”一r一’一一 膿考選 一’ ﹂ 300 900 1500 @一 P 0 1 [A.”.一一m一一..” 回転数N(rpm) 300 900 1500 回転数N(rpm) (c)発電機単独 (a) 電動オ幾単2i虫 ll [一 t’”’”””” 一’ net’tt i O.05 l O.05 ﹁ 2 0 1・ 0 0 0 α 0 α つ 5 2 5 1 5 0 0. α 0 ︵N∈・boよ︶つ 一 [thn・6gg; : . o.04 Lmi tt.mu......p,“....oma−utp,p”’““““”’pnv””pmua”’””””nt”1 1十 A O.04 l$, Sthgi・gi LiiiLiLiLLLiii i” i’ lli い翁 1,T ’g o.03 1中型0.02 一 卑」一 暉つ。.Ol 襲一 摩Po.01 一 i’ o I o 900 1500 i 300 L−rr 回転数N(rpm) 300 900 1500 L_」塵甲山N(・塑」 (d)発電機駆動電動機連結 (b) 電動機馬区動発電機連糸吉 図8,各回転数における慣性モーメント 5.あとがき ブラシの制動作用を利用して直流機の慣性モーメ だ機械損から摩擦トルクを求めたことが考えられる。 ントを測定した結果、誤差率14. 9%以内で測定する この点は今後の課題としたい。 ことができた。 この測定法では電動機の無負荷試験と減速特性試 験など比較的簡単な測定で慣性モーメントを求める 参考文献 ことができる。誤差の原因の一つとして、鉄損を含ん 1)藤田宏;電動力応用工学,(1985),115,森北出版 一65一
© Copyright 2026 Paperzz