一 般 力 学 II 2016(平成28)年度 3T 日時: 月曜日 5−8時限目 (12:50∼16:05) 教室: 総合科学部 K314講義室 担当教員: 広島大学 大学院工学研究科 輸送・環境システム専攻 海洋大気圏システム研究室 荒井 正純 居室: 工学部 A2 棟 332 号室 E-mail: [email protected] 目次 第 4 章 非慣性系における運動 59 4.1 相対運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 4.2 回転座標系における運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 4.2.1 回転座標系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 4.2.2 回転座標系における運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 4.2.3 回転座標系上にとった極座標系における運動方程式 . . . . . . . . . . . . . . . . . . 62 4.2.4 フーコーの振り子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 第 5 章 質点力学(その2) 66 5.1 運動量と力積 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66 5.2 多体問題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5.3 角運動量と力のモーメント . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 5.3.1 一般論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 5.3.2 デカルト座標系に関する表式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 5.3.3 平面運動の場合の表式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77 5.3.4 極座標系に関する表式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77 中心力による運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 5.4.1 一般論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 5.4.2 原点からの距離に比例した中心力の場合 . . . . . . . . . . . . . . . . . . . . . . . . 79 5.4.3 万有引力の場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 5.4.4 万有引力の場合 — 全エネルギーの保存を用いる方法 . . . . . . . . . . . . . . . . . 83 付 録 5.A 円錐曲線について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83 5.4 第 6 章 剛体の力学 6.1 6.2 87 固定軸のある剛体の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87 6.1.1 固定軸のある剛体の運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87 6.1.2 剛体の運動エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 6.1.3 剛体に作用する重力による力のモーメント . . . . . . . . . . . . . . . . . . . . . . . 89 6.1.4 慣性モーメント . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 6.1.5 固定軸のある剛体の運動の例 94 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 剛体の平面運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100 6.2.1 運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100 6.2.2 剛体の平面運動の例 1 – 円板の運動 – . . . . . . . . . . . . . . . . . . . . . . . . . . 102 6.2.3 剛体の平面運動の例 2 – 棒の運動 – . . . . . . . . . . . . . . . . . . . . . . . . . . . 105 iii 第 4 章 非慣性系における運動 運動方程式 (2.1) が成り立つ座標系を慣性系という.慣性系に対して等速度運動をする座標系は,やはり慣 性系である.一方,慣性系に対して加速度運動をする座標系は,非慣性系と呼ばれる.非慣性系では運動方 程式 (2.1) に対して修正項(慣性の力)が現れる.本章の前半では,この非慣性系における運動方程式を定 式化する.非慣性系の代表的なものは,自転する地球上に固定した座標系(回転座標系)である.本章の後 半ではこの回転座標系における運動を扱う.回転座標系では慣性の力として,コリオリ力,遠心力が現れる. 4.1 相対運動 慣性系 Oxyz に対して,座標軸の向きは変えずに,ある速度で運動している座標系を O′ x′ y ′ z ′ とする. ある質点の,Oxyz 系から見た位置ベクトルを r ,O′ x′ y ′ z ′ 系から見た位置ベクトルを r ′ とおくと,両者 の間に, r′ = r − r0 (4.1) −−→′ なる関係がある.ここで,r 0 = OO とおいた.(4.1) を時間について2回微分し,両辺に質量 m を掛け, 慣性系での運動方程式 (2.1) を用いると,O′ x′ y ′ z ′ 系での運動方程式は, mr̈ ′ = F − mr̈ 0 (4.2) となる.O′ x′ y ′ z ′ 系が等速度運動をしている場合,右辺第2項は0である.即ち,運動方程式は慣性系での 運動方程式 (2.1) と同形となる.この場合,O′ x′ y ′ z ′ 系も慣性系である.一方,O′ x′ y ′ z ′ 系が加速度運動を している場合には,この項は0ではない.運動方程式 (4.2) は (2.1) と形が異なるので,O′ x′ y ′ z ′ 系は慣性 z’ r′ z r O’ r0 y O x 図 4.1. 相対運動をする2つの座標系 59 x’ y’ 系ではない.項 −mr̈ 0 は,系が加速度運動していることにより現れる見かけの力で,これを慣性の力と呼 ぶ.この項のため,外力がない場合でも,初期に静止していた物体が運動を始めることがありうる. 問題 以下の問題では,鉛直下方に重力が働いているする.抵抗力は無視する. 4.1 一定の加速度 α で直線上を運動する列車の中で,高さ h0 の位置から,初速度 0 で質点を落下させる と,質点はどのような運動をするか. 4.2 一定の加速度 α で上昇するエレベータの中で,高さ h0 の位置から,水平方向に,初速度 u0 で質点を 発射させると,質点はどのような運動をするか. 4.3 静止摩擦係数が µ の水平な台の上に質点が置かれている.台を加速度 α で水平方向に動かす時,質点 が滑るために必要な α に対する条件を求めよ. 4.2 回転座標系における運動 自転している地球上における物体の運動を記述するような場合に,回転座標系が用いられる.本節の前半 では,回転座標系における運動方程式を導出する.この時,コリオリ力,遠心力と言った慣性の力が現れ る.本節の後半では,この運動方程式を,フーコーの振り子に適用し,その運動を考察する. 回転座標系 4.2.1 静止しているデカルト座標系 Oxyz(以下,静止系と呼ぶ)の z 軸の回りに,一定の角速度 Ω で回転している座標系 Ox′ y ′ z y (以下,回転系と呼ぶ)を考える.Oxyz 系に関する座標 (x, y) y’ と Ox′ y ′ z 系に関する座標 (x′ , y ′ ) との間には,以下の関係が ある. x’ r ey e′y e′x o Ωt x ex x′ = x cos Ωt + y sin Ωt, (4.3a) y ′ = −x sin Ωt + y cos Ωt. (4.3b) x′ 軸,y ′ 軸方向の基本ベクトルをそれぞれ e′x , e′y とすると, Oxyz 系の基本ベクトル {ex , ey } との間に, 図 4.2. z 軸のまわりに,一定の角速度 Ω で回転する回転座標系. 角速度ベクトル e′x = ex cos Ωt + ey sin Ωt, (4.4a) Ω = Ωez は紙面に垂直である. e′y = −ex sin Ωt + ey cos Ωt, (4.4b) なる関係がある.この時,質点の位置ベクトル r は,2種類の基本ベクトル系を用いて,2通りの表現で 表すことができる. r = xex + yey = x′ e′x + y ′ e′y (4.5) 静止系の基本ベクトルの時間微分は 0, 即ち,ėx = ėy = 0 である.回転系 Ox′ y ′ z 系の基本ベクトルの時 間微分は以下のようになる. ė′x = Ωe′y = Ω × e′x , 60 (4.6a) ė′y = −Ωe′x = Ω × e′y . (4.6b) ここで, Ω = Ωez (4.7) により定義される角速度ベクトル(回転ベクトル)を導入した.ez は,2 つの座標系に共通の z 軸の基本 ベクトルである.角速度ベクトルは,その大きさは系の回転角速度を与え,その向きは系の回転する向きに 右ねじを回した時,ねじの進む向きを与えるように定義される. この時,静止系 Oxyz で見た速度 v = ṙ と回転系 Ox′ y ′ z で見た速度 v ′ との間には, v = v′ + Ω × r (4.8) なる関係がある.ただし, v = ẋex + ẏey , v ′ = ẋ′ e′x + ẏ ′ e′y , とおいた.(4.8) 右辺第2項は,系が回転していることによる速度を表す.この項のため,静止系 Oxyz で 見た速度 v と,回転系 Ox′ y ′ z で見た速度 v ′ とは,異なったベクトルであることに注意する. 静止系 Oxyz で見た加速度 a = v̇ = r̈ と,回転系 Ox′ y ′ z で見た加速度 a′ との間には, a = a′ + 2Ω × v ′ − Ω2 r (4.9) なる関係がある.ただし, a = ẍex + ÿey , a′ = ẍ′ e′x + ÿ ′ e′y , とおいた.(4.9) 右辺第2,3項は,系が回転していることによる加速度を表す.やはりこれらの項のため, 静止系 Oxyz で見た加速度 a と,回転系 Ox′ y ′ z で見た加速度 a′ は,異なったベクトルである. 4.2.2 回転座標系における運動方程式 (4.9) の両辺に質量 m を掛け,静止系(慣性系)での運動方程式 ma = F を用いると,回転系 Ox′ y ′ z における運動方程式, ma′ = F − 2mΩ × v ′ + mΩ2 r (4.10) に帰着する.これを成分で表すと, mẍ′ = Fx + 2mΩẏ ′ + mΩ2 x′ , (4.11a) mÿ ′ = Fy − 2mΩẋ′ + mΩ2 y ′ , (4.11b) となる.右辺第1項は,通常の力であるが,右辺第2,3項は,系が回転していることにより生じる力(慣 性の力)である.特に,右辺第2項, −2mΩ × v ′ = (2mΩẏ ′ , −2mΩẋ′ ) 61 速度 をコリオリ力,右辺第3項, v′ mΩ2 r = (mΩ2 x′ , mΩ2 y ′ ) Ω を遠心力という. コリオリ力は,回転系に対して物体が運動する場合,即ち, ′ v ̸= 0 の場合のみ生じる.又,コリオリ力は,速度に垂直で, 回転の向き 右向き(Ω > 0 の場合)に作用する. 問題 コリオリ力 4.4 xy 平面上で原点から a だけ離れた位置に静止している質 −2mΩ × v ′ 点を,z 軸の回りに一定の角速度 Ω で回転する座標系か ら見る. [1] 回転系から見た時,この質点はどのような運動をするか. [2] 問 [1] で答えた運動の原因となる加速度を,コリオリ力,遠心力を用いて説明せよ. 4.5 力が作用しない,即ち,(Fx , Fy ) = (0, 0) の場合を考える.この場合,全エネルギーが保存することを 導出せよ.この過程で,コリオリ力はエネルギーに影響を与えないことがわかるが,それはコリオリ 力のどのような性質によるのか,説明せよ. 4.2.3 回転座標系上にとった極座標系における運動方程式 角度 θ は,静止系の x 軸の正方向を基準として測った位置 ベクトルのなす角,角度 θ′ は,回転系の x′ 軸の正方向を基 y 準として測った位置ベクトルのなす角とする.時刻 t の間に y’ x′ 軸は角度 Ωt だけ回転するから,2 つの角度の間には, r ey e′θ θ = Ωt + θ′ θ′ e′r なる関係がある. θ Ωt o x’ 静止系の基本ベクトル {ex , ey } と,極座標系の基本ベクト x ex ル {e′r , e′θ } との間には,第 1 章の (1.7) 式と同様, e′r = ex cos(Ωt + θ′ ) + ey sin(Ωt + θ′ ), 図 4.3. z 軸のまわりに,一定の角速度 Ω で (4.12a) e′θ = −ex sin(Ωt + θ′ ) + ey cos(Ωt + θ′ ). (4.12b) 回転する回転座標系上にとった極座標系. なる関係がある.これを時間微分することにより,基本ベク トルの時間微分の表式, e˙r ′ = (Ω + θ̇′ )e′θ , (4.13a) e˙θ ′ = −(Ω + θ̇′ )e′r . (4.13b) が得られる.位置ベクトル, r = re′r 62 (4.14) を時間微分し,(4.13) を適用すると,速度の表式, ṙ = ṙe′r + r(Ω + θ̇′ )e′θ (4.15) が得られる.これを更に時間微分し,(4.13) を適用すると,加速度の表式, [ ] 1 d 2 ′ ′2 ′ 2 ′ r̈ = [(r̈ − rθ̇ ) − 2Ωrθ̇ − Ω r]er + (r θ̇ ) + 2Ωṙ e′θ r dt (4.16) が得られる. この加速度の表式を用いると,回転系における運動方程式の動径成分と角成分が,以下のように得られる. m(r̈ − rθ̇′2 ) = Fr + 2mΩrθ̇′ + mΩ2 r, m (4.17a) 1 d 2 ′ (r θ̇ ) = Fθ − 2mΩṙ. r dt (4.17b) ここで,(Fr , Fθ ) は力の動径成分と角成分である.極座標系では,コリオリ力は (2mΩrθ̇′ , −2mΩṙ), 遠心 力は (mΩ2 r, 0) と表される. 4.2.4 フーコーの振り子 本小節では,回転座標系上にとった極座標系にお ける運動方程式を,フーコーの振り子に適用し,そ z の運動を考察する.本小節では,表記の簡便のため, 回転系を意味する ′ の添字は省き,θ′ は単に θ と A 書く. 振動面 φ l−z [1] l ■ 運動方程式 z 軸上の高さ l の点 A (0, 0, l) を支点として,長 T さ l の質量の無視できる糸の先端に,質量 m の質 点を取り付けた振り子がある.作用する力は,糸の r O 張力 T と重力 mg である.これらは,動径方向と z 軸を含む平面内にあり,この平面に垂直な成分,即 θ x’ ち,角成分は 0 である.振り子の z 軸からの振れ角 mg 動径方向 を ϕ と置くと,図に示す幾何学的な配置から, cos ϕ = 図 4.4. フーコーの振り子における設定. l−z , l r sin ϕ = , l (4.18a) (4.18b) となる.又,作用する力の動径成分 Fr , 角成分 Fθ , z 成分 Fz は, Fr = −T sin ϕ, (4.19a) Fθ = 0, (4.19b) Fz = −mg + T cos ϕ, (4.19c) 63 となる. 問題 3.1 と同様,振り子の振れ角 ϕ が微小な場合,cos ϕ ∼ 1 と近似することができるから,(4.18a) よ り z ∼ 0 と近似される.これは,z 方向には運動せず,(4.19c) は T ∼ mg と近似されることを意味する. 従って,力の動径成分 (4.19a) は, r Fr = −mg , l (4.19a)′ と近似される. (4.19a)′ , (4.19b) を (4.17) に代入し,両辺を m で割ると,運動方程式, g r̈ − rθ̇2 = − r + 2Ωrθ̇ + Ω2 r, l (4.20a) 1 d 2 (r θ̇) = −2Ωṙ, r dt (4.20b) が得られる. [2] ■ 運動方程式の解 • 角成分の解 (4.20b) の両辺に r を掛け,右辺を変形する. y’ 座標系の 回転方向 θ d 2 d (r θ̇) = −2Ωrṙ = − (Ωr2 ) dt dt x’ 振動面の 回転方向 ∴ d 2 [r (θ̇ + Ω)] = 0 dt ∴ r2 (θ̇ + Ω) = A ここで A は積分定数である.簡単のため,t = 0 で θ̇ = −Ω と仮定すると,A = 0 と定まる.この場合, 任意の時刻で, θ̇ = −Ω (4.21) となる.これを t = 0 で θ = 0 なる初期条件のもとで,更に積分すると, θ = −Ωt (4.22) となる. • 動径成分の解 (4.21) を (4.20a) に代入すると, g r̈ = − r l (4.23) √ となる.これは,問題 3.1 で求めた振り子の運動方程式と同形で,固有角振動数 で r = a, ṙ = 0 なる初期条件を満たす解は, (√ r = a cos である. • 運動の形態 64 g t l g の単振動を表す.t = 0 l ) (4.24) 動径方向と z 軸(回転軸)を含む面内で,単振動をする.こ の面を振動面と呼ぶ.解 (4.22) は,この振動面が一定の角速 度 Ω で時計回りに回転することを意味する.振動面の回転方 向は,座標系の回転方向と反対である. (4.22), (4.24) より,デカルト座標は, (√ ) g ′ x = a cos t cos Ωt, l ′ y = a cos (√ ) g t sin Ωt, l (4.25a) (4.25b) となる.この解を元に,質点の軌道を, xy 平面に投影した図 を図 4.5 に示す.この図では,振動の 5 周期分のみを示した. 点 P0 を出発した質点は,コリオリ力の作用を受け,軌道が右 図 4.5. フーコーの振り子の xy 平面に投 影した軌道,5 周期分. にずれるため,1/2 周期後には,x′ 軸から第 2 象限の側にずれ た点 P1 に到達する.点 P1 を出発した質点は,やはりコリオ リ力の作用を受け,軌道が右にずれるため,1/2 周期後には, 点 P2 に到達する.このような運動を繰り返し,質点は,P2 →P3 →P4 →P5 → P6 →P7 →P8 →P9 →P10 なる軌道を描いて運動する. 65 第 5 章 質点力学(その2) 本章では, 「一般力学 I」の「第 2 章 質点力学」の続きとして,以下のことを取り扱う. (i) 運動量と力積・多体問題 運動量,力積の概念を用いて,質量が変化する質点の運動や,互いに内力を及ぼし合う複数の質点の運 動を扱う.ここでは,作用・反作用の法則が重要となる. (ii) 角運動量と力のモーメント 角運動量,力のモーメントの概念について説明する.更に,角運動量が保存する条件を示す.ここで説 明したことは, 「第 6 章 剛体の力学」で用いる. (iii) 中心力による運動 角運動量が保存する運動の例として,中心力のもとでの質点の運動を取り扱う.問題によっては,2次 元極座標系を用いる. 5.1 運動量と力積 質量 m と速度(ベクトル) v の積 p = mv は,運動量と呼ばれ,やはりベクトルで定義される物理量 である.F を力のベクトルとした時,第 2 章で示したベクトル表記の運動方程式, d (mv) = F dt (2.1)′ ṗ = F (5.1) は,運動量を用いて, と書き換えられる.これまでは暗に質量 m は一定と仮定してきた.m を微分記号の中へ入れてこの式に 書き換えたのも,この仮定があるからである.m が一定でない,即ち,m が時間的に変化する場合には, (2.1) の形の運動方程式ではなく,(5.1) の形の運動量方程式が成り立つ. (5.1) を時刻 t0 から t まで積分すれば, ∫ t p(t) − p(t0 ) = F dt (5.2) t0 となる.ここで,p(t) のような表記は,p が 時間 t の関数であることを意味する.又,p(t0 ) のような表 記は,p の t = t0 における値を意味する.(5.2) 右辺の積分を,力 F の力積という.力により与えられた 力積の分だけ,運動量は変化する. [1] 撃力 簡単のため,運動は x 軸上に限られるとし,1 次元の運動量方程式, d (mvx ) = Fx dt 66 (5.3) を考える.ここで vx は速度である.力 Fx は,時刻 t0 から t0 + ∆t までの無限小の期間 ∆t の間のみ作 用するとする.この期間上で (5.3) を積分する. ∫ t0 +∆t t0 d (mvx )dt = dt ∫ t0 +∆t Fx dt t0 ∆t が無限小の場合,右辺の被積分関数 Fx は積分区間上では一定とみなすことができるから,上式は, mvx t0 +∆t − mvx = Fx · ∆t t0 と積分できる.無限小の期間に有限の大きさの力積が作用した場合,∆t → 0 の極限で Fx → ∞ であるが, 右辺の力積 Fx · ∆t は有限値に留まる.一方,こ の極限での左辺第 1 項の値は,左辺第 2 項とは異なる.即 ち,∆t → 0 の極限での左辺の運動量の変化は 0 ではない.このように,瞬間的に有限の大きさの力積を与 えることのできる力のことを撃力という.後出の問題 5.4 は,この撃力が作用する場合の問題である. 問題 O 5.1 大気中を落下する水滴は球形をしており,雲の中を通る時,その断面積に 比例して質量が増加する.ここで,水の密度 ρ0 は一定値とする.又,鉛 直下方には一様な重力が働いている.空気抵抗は無視する. [1] 時刻 t における水滴の半径を求めよ.ただし,t = 0 で半径は 0 と する. x 図 5.1. 問題 5.2 [2] 時刻 t における速度を求めよ.ただし,t = 0 で速度は 0 とする. 5.2 単位長さ当たりの質量 ρ0 の鎖が,図 5.1 に示すように,滑らかな机の上 から垂れ下がり,重力の作用を受けて落下している.机の上端を原点 O として,鎖の下端の座標を x とおく.この場合,鎖の下端が x の時の鎖 の落下速度 ẋ を求めよ.更に,x と時刻 t の関係式を求めよ.初期条件は,t = 0 で x = ẋ = 0 とする. 【問題 5.1 の解答】 題意の条件は,(i) 水滴は球形,(ii) 水滴の質量は球の断面積に比例して増加,(iii) 力としては重力のみ が作用の 3 つからなる.これらの条件は,以下のように定式化される. 条件 (i) :水滴の半径を r とおくと,その体積 V は, V = 4 3 πr 3 である.密度の定義(単位体積あたりの質量)より,質量 m は,m = ρ0 V と表されるから, m= 4 πρ0 r3 3 (5.4) となる. 条件 (ii) :質量 m の単位時間あたりの増加率は,時間微分 dm で表される.それが球の断面積(断面は dt 円) πr2 に比例する.比例係数を a とおくと,本条件は, dm = πar2 dt (5.5) と表される. 条件 (iii) :速度を v (落下するだけなので,鉛直下向きを正と定義)とおくと,運動量方程式は,重力の みが作用する場合, d (mv) = mg dt 67 (5.6) となる. 以上の 3 式を連立させて解けばよい. [1] (5.4) を時間について微分する.ここで,右辺は,合成関数の微分として扱うことに留意する. dm dt ∴ dm dt = 4 d ( 3) πρ0 r 3 dt = 4 d ( 3 ) dr πρ0 r · 3 dr dt = 4πρ0 r2 dr dt (5.7) 一方,(5.5) が成り立つから,これを (5.7) 左辺へ適用すると, πar2 = 4πρ0 r2 dr dt となる.これを整理すると,球の半径に関する微分方程式に帰着する. dr a = dt 4ρ0 (5.8) 右辺は定数なので,これは簡単に積分できる.与えられた初期条件より, r= a t 4ρ0 (5.9) となる. [2] 運動量方程式 (5.6) を,初期の時刻 0 から任意の時刻 t まで積分する. ∫ t m(t)v(t) − m(0)v(0) = g m(t)dt (5.10) 0 質量 m の関数形は, (5.9) を (5.4) に代入することで, m(t) = πa3 3 t 48ρ20 (5.11) と求まる.これを (5.10) に代入し,更に初期条件 v(0) = 0 を適用する. πa3 3 t · v(t) = 48ρ20 πa3 g 48ρ20 ∫ t t3 dt = g 0 πa3 g 4 · t 48ρ20 4 従って,速度は, v(t) = g t 4 と求まる. 【問題 5.2 の解答】 [1] 定式化 机から垂れ下がっている部分の鎖の質量(以下,これを単に質量と呼ぶ)は,ρ0 x である.鎖の落下とと もに,x は増加するので,質量も増加する.鎖に作用する力は重力のみであるから,その運動量方程式は, d (ρ0 xẋ) = gρ0 x dt 68 となる.ここで,ρ0 は定数であるから,両辺を ρ0 で割っておく. d (xẋ) = gx dt (5.12) p = xẋ (5.13) dp = gx dt (5.14) 便宜上, とおくと,運動量方程式は, と書き換えられる. [2] 運動量方程式の独立変数の書き換え 変数 p を時間 t ではなく,座標 x の関数とみなして,常微分方程式 (5.14) を dp に関する常微分方程式 dx に書き換える. p は時間 t の関数であるが,座標 x が t の単調な関数なら逆関数が存在し,t は x の関数と見なすことが できる.実際,本問の場合,鎖は落下するのみであるから,x は t の単調増加関数である.この場合,p は dp x の関数と見なすことができる.この時,p の時間微分 は,合成関数の微分として, dt dp dp dx dp = · = ẋ dt dx dt dx と書き換えることができる.従って,常微分方程式 (5.14) は, dp ẋ = gx dx p と書き換えられる.ここで,(5.13) より ẋ = x であるから,これは, dp p = gx2 dx と表される. [3] 運動量方程式の解 常微分方程式 (5.15) は,変数分離法により,簡単に解くことができる. まず,左辺を変数 p, 右辺を変数 x のみを含む,変数分離形に変形する. pdp = gx2 dx 次に,左辺を p, 右辺を x について積分する. ∫ ∫ pdp = g x2 dx 積分を実行すると, 1 2 1 p = gx3 + C 2 3 となる.ここで C は任意定数である.これを p について解くと,p ≥ 0 であるから, √ 2 3 p= gx + 2C 3 69 (5.15) となる.x = 0 で p = 0 となる初期条件を適用すると,C = 0 と定まる.従って,初期条件を満足する解は, √ 2 3 p= gx (5.16) 3 である. [4] 座標 x の解 (5.13) に解 (5.16) を代入して,速度 ẋ と座標 x の関係を表す常微分方程式に変形する. √ 2 3 gx = xẋ 3 である.両辺を x で割ると, √ ẋ = 2g 1 x2 3 (5.17) となる. 常微分方程式 (5.17), 即ち, dx = dt √ 2g 1 x2 3 を同様にして,変数分離法により解く. まず,左辺を変数 x, 右辺を変数 t のみを含む,変数分離形に変形する. √ 2g − 12 x dx = dt 3 次に,左辺を x, 右辺を t について積分する. √ ∫ x − 12 dx = 2g 3 ∫ dt 積分を実行すると, √ 1 2 2x = 2g t + C′ 3 となる.ここで C ′ は任意定数である.t = 0 で x = 0 なる初期条件を適用すると,C ′ = 0 と定まる. 従って, x 1 2 x = = g 2 t 6 となる. 5.2 √ 1 2 多体問題 70 2g t 3 本節では,互いに相互作用し合う,複数の質点からなる系の運動 F2 を取り上げる.なお,本節では,個々の質点の質量は一定とする. 簡単のため,2 つの質点 1, 2 からなる系を考える.質点 1, 2 の 質量をそれぞれ m1 , m2 , 位置ベクトルをそれぞれ r 1 , r 2 ,作用する F1 外力のベクトルをそれぞれ F 1 , F 2 とする.更に, 2 つの質点の間に F 12 F 21 m2 m1 は内力が作用するとし,質点 2 が質点 1 に及ぼす内力のベクトルを F 12 , 質点 1 が質点 2 に及ぼす内力のベクトルを F 21 とする.この 場合,それぞれの質点のベクトル表記の運動方程式は, 図 5.2. 相互作用し合う 2 質点系. m1 r̈ 1 = F 1 + F 12 , (5.18a) m2 r̈ 2 = F 2 + F 21 , (5.18b) である.ここで,作用・反作用の法則より,質点 1 が質点 2 に及ぼす内力は,質点 2 が質点 1 に及ぼす 内力と,大きさは等しく,向きは反対で, F 21 = −F 12 (5.19) が成り立つ.特に,それぞれの質点に作用する外力が 0,即ち,F 1 = F 2 = 0 の場合には,2 つの質点の 運動方程式の和は, m1 r̈ 1 + m2 r̈ 2 = 0 となる.この場合,定数である質量を時間微分の中へ入れることにより, d (m1 ṙ 1 + m2 ṙ 2 ) = 0 dt (5.20) に帰着する.これは,内力のみが作用する場合には,2 質点系の運動量,m1 ṙ 1 + m2 ṙ 2 が時間的に一定に 保たれる,即ち,系の運動量が保存することを示す. 問題 5.3 単位時間あたり µ の割合で,ガスを,後方へ相対速度 V で噴出することで,直線上を運動するロケッ トがある.ここで µ, V は正の定数である. [1] 任意の時刻 t におけるロケットの質量 m を求めよ.ただし,t = 0 で m = m0 とする. [2] 任意の時刻 t におけるロケットの質量,速度をそれぞれ m, v, 時刻 t + ∆t におけるロケットの質量,速 度をそれぞれ m + ∆m, v + ∆v とおく.ここで, 時刻 t から t + ∆t までの間に,質量 −∆m だけのガ スが噴出したと考えた.更に,時刻 t + ∆t におけるガスの速度を u とおく.ガスは,噴出した後,す みやかにロケットから離れるので,時刻 t におけるガスの質量は 0 と考えてよい. 外力が作用しない場合,時刻 t から t + ∆t までの間の,ロケットとガスからなる系の運動量の変化 は 0 となる(即ち,系の運動量は保存する).この運動量の変化の式を,与えられた記号を用いて示せ. [3] 題意より,時刻 t + ∆t におけるガスの相対速度に関して, −V = u − (v + ∆v) (5.21) が成り立つ.ここで,相対速度とは,ロケットに固定した座標系から見たガスの速度のことである.左 辺に負号がつくのは,ガスがロケットの進行方向(速度の正の向きと定義)とは逆向きに噴出するから である. 71 この式を用いて,問 [2] で示した式から u を消去した式を示せ.更に,この式の両辺を ∆t で割り, ∆t → 0 の極限をとることで得られる常微分方程式を示せ. [4] 問 [1] の結果を,問 [3] で求めた常微分方程式に代入することで,その方程式の解を求めよ.ただし,t = 0 で v = 0 とする. 【解答】 [1] 題意より,方程式, dm = −µ dt (5.22) が成り立つ.与えられた初期条件のもとで,これを積分すると, m = m0 − µt (5.23) となる. [2] 題意より,時刻 t から t + ∆t までの間の,ロケットの運動量の変化は, (m + ∆m)(v + ∆v) − mv, ガスの運動量の変化は, −∆m · u − 0 である.重力等の外力が作用しない場合,ロケットとガスからなる系の運動量は保存し, [(m + ∆m)(v + ∆v) − mv] + [−∆m · u − 0] = 0 ∴ (m + ∆m)(v + ∆v) − mv − ∆m · u = 0 (5.24) が成り立つ. [3] (5.21) より, u = v + ∆v − V である.これを (5.24) に代入する. (m + ∆m)(v + ∆v) − mv − ∆m · (v + ∆v − V ) = 0 左辺を整理すると, m∆v + V ∆m = 0 となる.両辺を ∆t で割り,∆t → 0 の極限をとる. ∆v ∆m m lim + V lim =0 ∆t ∆t→0 ∆t→0 ∆t この極限は,常微分方程式, m dv dm +V =0 dt dt に帰着する. 72 (5.25) [4] (5.22), (5.23) を (5.25) に適用すると, (m0 − µt) ∴ dv − µV = 0 dt dv µV = dt m0 − µt となる.これを時間積分する. v = −V log(m0 − µt) + C ここで C は積分定数である.なお,質量は正であるべきであるから,対数の内部は正と考えて,絶対値は 付けなかった.これに,t = 0 で v = 0 なる初期条件を適用すると, C = V log m0 となる.従って,この初期条件を満たす解は, ( v = V log m0 m0 − µt ) である. 問題 I 5.4 図 5.3 に示すように,質量 m1 , m2 , m3 の質点 A, B, C がある.質点 A, B 間と質点 B, C 間は糸で結ばれ, AB と BC のなす角が π − α (0 < α < π/2) となる C ようにして,滑らかな水平面上におかれている.質点 C に,BC の延長の方向に,大きさ I の力積を作用さ せた時,質点 A の速度と,質点 B の動き出す方向を α 求めよ.ただし,各糸は一直線上に張っており,伸び A B 縮みしないものとする. 図 5.3. 問題 5.4 【解答】 −→ 外力として,質点 C に大きさ I の力積が,ベクトル BC y I −→ BC x α A にも力積が与えられて,C だけでなく,B, A も動き始 −→ AB T2 T2 T1 A 方向に与えられる.その結果,糸の張力を通して,質点 B, α T1 B C める.この時,C や A には糸の方向に力積が作用するの −→ −→ で,C は BC 方向に,A は AB 方向に速度を持つ.それ −→ −→ に対して,B には,BC 方向の張力と BA の張力の合力に よる力積が作用するため,その速度の向きは未知である. −→ −→ 座標系としては,AB 方向に x 軸を,AB に垂直で,図 の上向きに y 軸をとる. 以上のことを考慮して,未知の変数を次のように与える. まず,動き始めた直後の速度として,A の速度(x 成分のみ)を u1 ,B の速度の x 成分,y 成分をそれぞ れ u2 ,v2 , C の速度の x 成分,y 成分をそれぞれ u3 ,v3 とおく. 糸の張力による力積は次のように与える.糸 AB に作用する力積の大きさを T1 ,糸 BC に作用する力積 −→ の大きさを T2 とおく.この場合,作用・反作用の法則により,糸 AB の力積(AB 方向を正と定義)の 73 うち,質点 A に作用する力積は,T1 ,質点 B に作用する力積は,反対向きの −T1 となる.又,糸 BC −→ の力積(BC 方向を正と定義)のうち,質点 B に作用する力積は,T2 ,質点 C に作用する力積は,反対 向きの −T2 となる. 質点 A の運動量の変化(x 成分のみ),質点 B の運動量の変化(x, y 成分),質点 C の運動量の変化 −→ (BC 方向の成分)に関する方程式は,以下のようになる. m1 u1 = T1 , (5.26a) m2 u2 = T2 cos α − T1 , (5.26b) m2 v2 = T2 sin α, (5.26c) m3 u3 = (I − T2 ) cos α, (5.26d) m3 v3 = (I − T2 ) sin α. (5.26e) ここで,(5.26d)× cos α+(5.26e)× sin α より, m3 V3 = I − T2 . (5.27) V3 = u3 cos α + v3 sin α (5.28) が得られる.ここで, −→ −→ は,質点 C の速度の糸 BC 方向の成分である.(5.27) は,質点 C の運動量の変化の糸 BC 方向の成分に 関する方程式になる. 速度に関する未知量が 4 成分,力積に V3 v3 関する未知量が 2 成分,合計 6 個の未知 量が与えられた.それに対して,運動量 の変化の式は,速度に関する未知量と同 C u3 v2 u1 A V2 u2 B (a)糸ABが伸び縮みしない条件 α B u2 (b)糸BCが伸び縮み しない条件 じ数の 4 個しかない.本問題を解くには, あと 2 つの式が必要となる.それは,糸 AB, BC が伸び縮みしない条件式である. −→ 即ち,質点 A の速度の AB 方向の成分と, −→ 質点 B の速度の AB 方向の成分が等し −→ くなることと,質点 B の速度の BC 方向 −→ の成分と,質点 C の速度の BC 方向の 成分が等しくなることの 2 式である.こ れは以下のように与えられる. u1 = u2 , (5.29a) V3 = u2 cos α + v2 sin α, (5.29b) となる. (5.26a), (5.29a) を (5.26b) に適用すると, T2 = (m1 + m2 ) 74 u2 cos α (5.30) となる.これを (5.26c) に代入すると, ( ) m1 v2 = 1 + u2 tan α m2 が得られる.これより質点 B が動き出す方向 θ は, ) ( m1 v2 tan θ = = 1+ tan α u2 m2 (5.31) (5.32) で与えられる. (5.29b) を (5.27) に代入すると, m3 u2 cos α + m3 v2 sin α = I − T2 (5.33) が得られる.これに (5.30), (5.31) を代入する. ( ) m1 u2 m3 u2 cos α + m3 1 + u2 tan α sin α = I − (m1 + m2 ) m2 cos α これを u2 について解き,(5.29a) を考慮すると, u1 = ( m3 1 + m1 m2 I cos α ) sin2 α + (m1 + m2 ) が得られる. 5.3 角運動量と力のモーメント 本節では,角運動量と力のモーメントの概念について説明する.ここでは,ベクトル表記の運動方程式 に対して,ベクトル積の演算を適用して,式の変形を行う.なお,質量 m は再び,一定と仮定する. 5.3.1 一般論 ベクトル表記の運動方程式 (2.1) の両辺に,左から,位置ベクトル r とのベクトル積をとる. mr × r̈ = r × F ここで,ベクトル積 r × ṙ の時間微分について, d (r × ṙ) = ṙ × ṙ + r × r̈ = r × r̈ dt が成り立つことを考慮すると(「一般力学 I」第 0 章 (0.14c) 式参照), d (mr × ṙ) = r × F dt (5.34) となる.ここで m は定数なので,微分記号の中へ入れた. ベクトル L = mr × ṙ は角運動量,ベクトル N = r × F は力のモーメントで,これらはベクトル積で 定義される物理量となる.(5.34) を角運動量方程式と呼ぶ.この方程式は,角運動量の時間変化率が力の モーメントに等しいことを示す. 特に,力のモーメントが 0 の場合,角運動量は時間的に一定のベクトルとなる.これを角運動量が保存 するという. 75 角運動量や力のモーメントの定義には位置ベクトルが含まれるので,これ r r′ らの値は原点の選び方に依存する.しかし,原点が変わっても角運動量方程 式の形は変わらない.このことを証明する. O r0 仮に,原点を O から,定ベクトル r 0 だけ O′ へ移動させたとする.O′ O’ に関する位置ベクトルを r ′ とすると, r = r0 + r′ (5.35) なる関係がある.これを時間について 1 回,2 回微分する. ṙ = ṙ ′ (5.36) r̈ = r̈ ′ (5.37) まず,(5.37) より,新しい座標系に関する運動方程式は, mr̈ ′ = F (5.38) となり,元の座標系の運動方程式 (2.1) と同型である.これは,座標変換 (5.35) が単なる平行移動であり, 新しい座標系が,慣性系であることを意味する(「一般力学 I」第 4.1 節参照). 一方,角運動量方程式 (5.34) に同じ座標変換 (5.35) を施すと, d [m(r 0 + r ′ ) × ṙ ′ ] = (r 0 + r ′ ) × F dt mr 0 × r̈ ′ + d (mr ′ × ṙ ′ ) = dt r0 × F + r′ × F となる.ここで (5.38) より,左辺第 1 項と右辺第 1 項は等しく, d (mr ′ × ṙ ′ ) = r ′ × F dt (5.39) に帰着する.座標変換 (5.35) を施して得られる原点 O′ に関する角運動量方程式は,元の原点 O に関する 角運動量方程式 (5.34) と同型である.このことは,原点の選び方を変えても,結果として記述される運動 は同じであることを意味する. 5.3.2 デカルト座標系に関する表式 質点のデカルト座標を r = (x, y, z), 力のデカルト座標系に関する成分を F = (Fx , Fy , Fz ) とおく.この 時,角運動量 L = mr × ṙ のデカルト座標系に関する成分 L = (Lx , Ly , Lz ) は, Lx = m(y ż − z ẏ), Ly = m(z ẋ − xż), Lz = m(xẏ − y ẋ), である.又,力のモーメント N = r × F のデカルト座標系に関する成分 N = (Nx , Ny , Nz ) は, Nx = yFz − zFy , Ny = zFx − xFz , Nz = xFy − yFx , である.従って,角運動量方程式 (5.34) のデカルト座標系に関する成分は,下式のようになる. d [m(y ż − z ẏ)] = yFz − zFy , dt 76 (5.40a) d [m(z ẋ − xż)] = zFx − xFz , dt (5.40b) d [m(xẏ − y ẋ)] = xFy − yFx . dt (5.40c) 問題 5.5 質量 m の質点の,時刻 t におけるデカルト座標が, x = a cos ω0 t, (5.41a) y = a sin ω0 t, (5.41b) z = v0 t, (5.41c) で与えられている.ここで a, ω0 , v0 は定数とする. [1] 速度の x, y, z 成分を計算せよ. [2] 角運動量の x, y, z 成分を計算せよ. 5.3.3 平面運動の場合の表式 特に,力が xy 面に平行な場合を考える.この場合,xy 面上におかれた質点の初速度が xy 面に平行なら ば,その後の運動は xy 面上に限られる.この時,角運動量,力のモーメントのいずれも z 成分のみ値を持 ち,角運動量方程式は, d [m(xẏ − y ẋ)] = xFy − yFx dt (5.40c) なる簡単な形となる. 問題 5.6 鉛直下方に一様な重力が作用する場の中で,原点から初速度 v0 で,水平方向と θ0 の角度をなす方向 に,質量 m の質点を投げ上げる(「一般力学 I」問題 2.1 と同様の設定).ただし,抵抗力は無視する. [1] 任意の時刻 t における速度,更に,座標を求めよ. [2] 問 [1] の結果を用いて,時刻 t における角運動量と力のモーメントを計算せよ.そして,角運動量の時 間変化率は,力のモーメントに等しいことを確かめよ. 5.3.4 極座標系に関する表式 2 次元極座標系を用いた場合,角運動量の方程式 (5.40c) は, d (mr2 θ̇) = rFθ dt (5.42) と表される.ここで,r は原点から質点までの距離,θ は x 軸の正の向きに対する位置ベクトルのなす角で ある.これらはデカルト座標と, x = r cos θ, y = r sin θ, 77 (1.5) なる関係にある(「一般力学 I」第 1.2.1 節参照).又,力の動径成分 Fr ,角成分 Fθ は,デカルト座標系に 関する成分と, Fr = Fx cos θ + Fy sin θ, (5.43a) Fθ = −Fx sin θ + Fy cos θ, (5.43b) なる関係にある. 問題 5.7 以下の手順にしたがって,(5.40c) から (5.42) を導出したい. [1] 角運動量の z 成分は極座標系を用いて書き換えると, m(xẏ − y ẋ) = mr2 θ̇ (5.44) となる.これを示せ. [2] 力の成分の変換則 (5.43) を逆に解いて,Fx , Fy を Fr , Fθ で表せ. [3] (1.5) 式及び問 [2] の結果を用いて,力のモーメントの z 成分が,rFθ となることを示せ. 中心力による運動 5.4 質点に働く力の方向が常にある固定点を向き,その大きさ F は固定点からの距離 r にのみ依存するとす る.このような力は,中心力と呼ばれる.r に比例した引力や,r2 に反比例した万有引力は中心力の例で ある.本節では,この中心力を受ける質点の運動を取り扱う. 5.4.1 一般論 中心力 [1] 質量 m1 の質点 1 と質量 m2 の質点 2 が,互いに中心力を及ぼし F 21 m2 あっているとする.位置ベクトル r 2 にある質点 2 が位置ベクトル r 1 にある質点 1 に及ぼす力を F 12 , 逆に,質点 1 が質点 2 に及ぼす 力を F 21 とおくと,2つの質点間の距離 r = |r 2 − r 1 | のみに依存 r2 する関数 F (r) を用いて, rG m1 r1 F 12 F 12 = F (|r 1 − r 2 |) r1 − r2 , |r 1 − r 2 | F 21 = F (|r 2 − r 1 |) r2 − r1 , |r 2 − r 1 | と表すことができる.F < 0 の場合は引力を,F > 0 の場合は斥力 図 5.4. 中心力を及ぼしあう 2 質点. を意味する.又,|r r | はベクトル r の向きの単位ベクトルを表す.中 心力では F 12 = −F 21 となり,作用・反作用の法則が成り立つ. 78 [2] 2質点系の運動方程式 質点 1 と質点 2 には互いの間に中心力が働くのみで,それ以外の外力は働いていないと仮定する.この 場合,各質点の運動方程式は, m1 r̈ 1 = F 12 , (5.45a) m2 r̈ 2 = F 21 , (5.45b) となる.作用・反作用の法則が成り立つ (F 12 = −F 21 である) ことより,2質点系の運動量は保存する (「5.2. 多体問題」参照).更に,2質点系の角運動量は保存する. d (m1 r 1 × ṙ 1 + m2 r 2 × ṙ 2 ) = 0. dt [3] (5.46) 1 質点の問題に置き換え 2質点系の重心, rG = m1 r 1 + m2 r 2 m1 + m2 (5.47) を導入すると,運動方程式は,重心 r G に関する方程式と,相対変位 r = r 1 − r 2 に関する方程式とに分離 できて, M r̈ G = 0, (5.48a) r mr̈ = F (r) , r (5.48b) 2 と書き換えることができる.ここで,M = m1 + m2 は系の全質量,m = mm1+mm は換算質量である.2 1 2 質点系には,内力である中心力以外の力が働いていないため,系の重心は等速度運動をする.そこで,これ 以降は,系の重心の運動には着目せず,2質点の相対的な変位の運動(運動方程式 (5.48b))のみに着目す ることにする.このように,中心力を及ぼし合う2質点の運動は,中心力を外力として受ける換算質量 m の1質点の運動と等価になる. 運動方程式 (5.48b) では,やはり力のモーメントが 0 となるから,角運動量 L0 = mr × ṙ は保存する. 即ち,L0 は定ベクトルとなる.この場合,初期に L0 に平行な速度成分が 0 であるならば,それ以後の時 刻では,運動は L0 を法線ベクトルとする平面上に限られることになる.この理由から,以下の小節では, 運動は平面上で起こると仮定する. 5.4.2 原点からの距離に比例した中心力の場合 運動が起こる平面を xy 平面に選ぶ.原点からの距離に比例した中心力の場合,即ち,F (r) = −kr の場 合,デカルト座標系で表した運動方程式は, mẍ = −kx, mÿ = −ky, となる.ここで k は比例定数で,k > 0 と仮定する. 「第 3.1 節 単振動」の時と同様,ω0 = √ k m とおくと, 運動方程式は, ẍ = −ω02 x, 79 (5.49a) ÿ = −ω02 y, (5.49b) x = C1 cos ω0 t + C2 sin ω0 t, (5.50a) y = D1 cos ω0 t + D2 sin ω0 t, (5.50b) と表される.(5.49a), (5.49b) の一般解は, である.ここで C1 , C2 , D1 , D2 は任意定数である.更に,振幅 A, B と初期位相 α, β を用いると, C1 = A cos α, C2 = −A sin α, D1 = B cos β, D2 = −B sin β と置き換えられ,一般解は, x = A cos(ω0 t + α), (5.51a) y = B cos(ω0 t + β), (5.51b) と書き換えられる. 解 (5.50) より時間 t を消去し,軌道の方程式を求める.(5.50a)×D2 −(5.50b)×C2 より sin ω0 t を, (5.50a)×D1 −(5.50b)×C1 より cos ω0 t を消去すると,以下の 2 式が得られる. D2 x − C2 y = (C1 D2 − C2 D1 ) cos ω0 t, D1 x − C1 y = −(C1 D2 − C2 D1 ) sin ω0 t. それぞれを 2 乗した式の和をとると,t が消去され,軌道の方程式となる. (D2 x − C2 y)2 + (D1 x − C1 y)2 = (C1 D2 − C2 D1 )2 見通しをよくするため,振幅と初期位相で書き換える. B 2 x2 − 2AB cos(α − β) · xy + A2 y 2 = A2 B 2 sin2 (α − β) 初期位相の差を δ = α − β とおくと,軌道の方程式は最終的に, B 2 x2 − 2AB cos δ · xy + A2 y 2 = A2 B 2 sin2 δ (5.52) と表される. 図 5.5. 変位に比例した中心力の場合の軌道.α = 0◦ とした.(a) δ = 0◦ , (b) δ = 45◦ , (c) δ = 90◦ の場合. 一般に,方程式 (5.52) は楕円を表す.ただし,主軸は座標軸に平行とは限らない. 80 特に,δ = 0◦ の場合,(5.52) は, Bx − Ay = 0 に帰着する.これは直線を表す.図 5.5(a) にその軌道と,α = 0◦ の場合の,ω0 t = 0◦ , 90◦ , 180◦ , 270◦ で の位置を示す. δ = 45◦ の場合,軌道は,主軸が座標軸に平行でない楕円となる(図 5.5(b)). δ = 90◦ の場合,(5.52) は, B 2 x2 + A2 y 2 = A2 B 2 に帰着する.これは座標軸を主軸とする楕円を表す(図 5.5(c)). 5.4.3 万有引力の場合 中心力のみが作用する場合,力は動径成分のみを持ち,角成分は 0 となるので,極座標系を用いるのが 便利なことがある.F (r) なる関数形の中心力の場合,極座標表示の運動方程式 (2.42) は, m(r̈ − rθ̇2 ) = F (r), (5.53a) 1 d 2 (r θ̇) = 0, r dt (5.53b) m となる. 角成分 (5.53b) は,角運動量 mr2 θ̇ が保存することを意味する(第 5.3.4 節 (5.42) 式参照).(5.53b) よ り,a を定数として, θ̇ = a r2 (5.54) とおける. ここでは (5.53a) を解いて,r を時間の関数として求めるのではなく,r を θ の関数として求める,即ち, 極座標系で表した軌道の方程式を求めることにする.時間 t が θ の逆関数として表される場合,時間微分 は,(5.54) を用いると, d dθ d a d = · = 2 dt dt dθ r dθ のように,θ に関する微分で置き換えられる.よって,ṙ, r̈ は,以下のように表される. ṙ = a dr , r2 dθ a d r̈ = 2 r dθ ( (5.55) a dr r2 dθ ) [ ] ( )2 a a d2 r d ( a ) dr dr a2 d2 r 2a2 dr = 2 2 2+ · · = 4 2− 5 . r r dθ dr r2 dθ dθ r dθ r dθ (5.56) (5.54), (5.56) を (5.53a) に代入すると, a2 d2 r 2a2 − 5 r4 dθ2 r が得られる.ここで便宜上,f (r) = ( dr dθ )2 − a2 = f (r) r3 F (r) m と置き換えた. 81 (5.57) 常微分方程式 (5.57) の解法の便宜のため, u= 1 r (5.58) と変数変換を施す.この場合, 1 du dr =− 2 , dθ u dθ d2 r 1 d2 u d = − − 2 2 2 dθ u dθ du ( 1 u2 ) · du du 1 d2 u 2 · =− 2 2 + 3 dθ dθ u dθ u ( du dθ )2 , と変換される.これを (5.57) に適用すると,常微分方程式 ( ) d2 u 1 1 + u = − f dθ2 a2 u 2 u (5.59) に帰着する. ここから先,中心力が万有引力である, k r2 の場合を考える(k は正の定数).この場合,(5.59) は f (r) = − (5.60) k d2 u +u= 2 2 dθ a となる.θ = 0 で r が極小値 r0 をとるような (5.61) の解は, r= (5.61) l 1 + e cos θ (5.62) となる.ただし, l= a2 , k e= a2 − 1, kr0 とおいた.θ = 0 では ṙ = 0 であるから,速度 は角成分 v0 のみを持つ.この位置での角速度は θ̇ = vr00 であるから,(5.54) より,a = r0 v0 とな る.よって, r02 v02 r0 v02 , e= − 1, k k と表される.即ち,これらの定数は,初期の位置 l= r0 , 初速度 v0 と万有引力定数 k で決まる. (5.62) は原点を焦点とする離心率 e の円錐曲線 の方程式である.e = 0 は円,0 < e < 1 は楕円, e > 1 は双曲線を表す.e = 1 の場合は放物線とな る.即ち, で与えられた速度 v0 が, √ √ r = r0 , θ = 0√ k k 2k v0 = r0 の場合は円, r0 < v0 < r0 の場合 √ √ 2k 2k は楕円,v0 = r0 の場合は放物線,v0 > r0 図 5.6. 万有引力場における軌道 の場合は双曲線となる.円錐曲線の詳細は,付録 5.A で説明する. 問題 5.8 2 階常微分方程式 (5.61) の解が (5.62) となることを示せ. 82 5.4.4 万有引力の場合 — 全エネルギーの保存を用いる方法 万有引力を受けた質点の全エネルギーは, E= 1 2 mk ma2 mṙ − + 2 r 2r2 (5.63) となる.これを ṙ = dr > 0 と仮定して, dr について解くと, dt dt √ dr 2E 2k a2 = + − 2 dt m r r (5.64) となる. これを (5.54) を用いて, dr に関する常微分方程式に書き換えると, dθ √ 1 dr 2E 2k 1 1 = + 2 − 2 r2 dθ ma2 a r r (5.65) となる.解法の便宜のため,(5.58) 式に従って変数変換をし, du に関する常微分方程式に書き換えると, dθ √ du 2E 2k =− + 2 u − u2 (5.66) 2 dθ ma a となる. この常微分方程式の一般解は変数分離法により求めることができて, u= k + A cos(θ + θ0 ) a2 (5.67) となる.ここで定数 A は, √ A= 2E k2 + 4 2 ma a により定義される.θ0 は任意定数である.特に,θ = 0 で u が極値 u = (5.68) 1 r0 をとる解は,変数 u を r に戻 せば,(5.62) と同じ形となる. 付 録 5.A 円錐曲線について 極座標表示の円錐曲線の方程式, r= l 1 + e cos θ (5.62) の性質について説明する.まず,(5.62) を, x = r cos θ, y = r sin θ, (1.5) に従って,デカルト座標で書き換える. r = l − er cos θ = l − ex ここで両辺を 2 乗し,r2 = x2 + y 2 であることを適用すると, x2 + y 2 = (l − ex)2 83 (5.69) となる. (i) e = 0 の場合 (5.69) は, x2 + y 2 = l 2 (5.70) に帰着する.これは,原点を中心とした半径 l の円である. (ii) 0 < e < 1 の場合 (5.69) は, ( le x+ 1 − e2 )2 y2 + = 1 − e2 ( l 1 − e2 )2 (5.71) なる形に変形できる.これは,長軸の長さ A, 短軸の長さ B の楕円である.これらは, A= l , 1 − e2 l B=√ 1 − e2 (5.72) と表される. 楕円の中心 C の x 座標は, xc = − le , 1 − e2 である.又,1 つの焦点 F1 は原点 O,もう 1 つの焦点 F2 の x 座標は, xf = −2|xc | = − 2le , 1 − e2 (5.73) である.楕円の性質は,楕円上の任意の点を P とした 時,各焦点から P までの距離の和,F1 P + F2 P が一定 値となることである.このことを確かめる.まず, F1 P = √ x2 + y 2 = r, F2 P = √ (x − xf )2 + y 2 , 図 5.7. 楕円 (5.74) である.後者の式の 2 乗を更に変形する. 2 F2 P = x2 + y 2 − 2xf x + x2f = r2 − 2xf r cos θ + x2f r ここで.(5.62) より r cos θ = l − e であるから, 2xf F2 P = r + r + xf e 2 2 ( ) 2l xf − e と変形される.これに (5.73) を代入し,整理すると, 2 F2 P = r 2 − 2le 4l r+ 2 1−e 1 − e2 ( 2le 2l + 2 1−e e 84 ) ( = 2l −r 1 − e2 )2 l に帰着する.右辺の (· · · ) 内の符号を評価する.まず,r の最大値 rmax は θ = π の時に得られ,rmax = 1 − e である.これより,不等式, 2l 2l 2l l l −r ≥ − rmax = − = >0 2 2 2 1−e 1−e 1−e 1−e 1+e が成り立つ.従って, F2 P = 2l −r 1 − e2 (5.75) となる.(5.74) と (5.75) の和を取ると, F1 P + F2 P = 2l = 2A 1 − e2 (5.76) となる.即ち,楕円の各焦点から 楕円上の任意の点までの距離の和は一定値で,長軸の長さの 2 倍となる ことが示された. (iii) e = 1 の場合 (5.69) は, x= l2 − y 2 2l (5.77) に帰着する.これは x 軸を軸とする放物線である. (iv) e > 1 の場合 (5.69) は, ( x− le 2 e −1 )2 − y2 = 2 e −1 ( l 2 e −1 )2 (5.78) なる形に変形できる.これは双曲線を表す. x 軸との交点の座標は,上式に y = 0 を代入することで,x = l l e + 1 , e − 1 と得られる.この 2 点のうち,左側の交点を Z1 , 右側の 交点を Z2 と置く. 双曲線の 1 つの焦点 F1 は原点 O である.もう 1 つの焦点 F2 の x 座標は, xf = OZ2 + F2 Z2 = OZ2 + F1 Z1 = l 2le l + = 2 , e−1 e+1 e −1 (5.79) である.双曲線の性質は,双曲線上の任意の点を P とした時,各焦点から P までの距離の差,F2 P − F1 P が一定値となることである.このことを確かめる.楕円の場合と同様, F1 P = r, ( 2 F2 P = (5.80) 2l +r e2 − 1 )2 (5.81) となる.e > 1 の場合,(5.81) 右辺の (· · · ) 内は正値であるから, F2 P = e2 2l +r −1 85 (5.82) となる.(5.82) と (5.80) の差を取ると, F2 P − F1 P = 2l e2 − 1 (5.83) となる.即ち,双曲線の各焦点から 双曲線上の任意の点までの距離の差は一定値となることが示された. 双曲線は,F1 (原点 O)を焦点とする分枝と,F2 を焦点とする分枝の 2 つの曲線が存在する.実際の 運動の軌道は,F1 (原点 O)を焦点とする分枝になる.e( > 1)の場合,(5.62) で r > 0 であるためには, −θm < θ < θm でなければならない.ここで θm = cos−1 − 1e で,角度は 0 < θm < π の範囲で定義し た.(5.62) で,F1 (原点 O)を焦点とする分枝は,角度が −θm < θ < θm の場合(r > 0 の場合)に対応 する.一方,F2 を焦点とする分枝は,角度が θm < θ < 2π − θm の場合(r < 0 の場合)に対応する. 86 第 6 章 剛体の力学 本章では,前章まで対象としてきた質点とは異なり,大きさの無視できない物体の運動について考える.大 きさを持ち,かつ,その構成要素の相対的な距離が不変である(すなわち,変形しない)物体を剛体とい う.本章では,剛体の運動形態に応じて,以下のテーマを取り扱う. (i) 固定軸のある剛体の運動 剛体に軸が固定されている場合について,その軸の回りの運動を考える.最初に,剛体を質点系とみな して,固定軸に関する質点系の角運動量の方程式から,固定軸の回りの剛体の回転運動の方程式を導出 する.次に,棒状又は平板上の剛体について,固定軸のある剛体の運動の例をいくつか取り上げる. (ii) 慣性モーメントの計算法 剛体の回転運動の方程式を導出する過程で,慣性モーメントと呼ばれる物理量が現れる.棒状又は平板 上の剛体について,この慣性モーメントの計算法を説明する.ここでは 2 重積分法が必要となる. (iii) 剛体の平面運動 棒状又は平板上の剛体について,その平面運動を考える.剛体の平面運動は,その重心に関する並進運 動と,重心のまわりの回転運動に分解して記述することができるが,最初にそのことを証明する.次に 平面運動の例として,円板が転がる運動と棒が倒れる運動を取り上げる. 6.1 固定軸のある剛体の運動 本節では,剛体に軸が固定されている場合について,その軸の回りの運動を考える.これは最も簡単な 剛体の運動の形態である. 6.1.1 固定軸のある剛体の運動方程式 最初に,剛体を質点系とみなして,固定軸に関する質点系の角運動量の方程式から,固定軸の回りの剛 体の回転運動の方程式を導出する. 剛体は,同一平面(これを xy 平面にとる)上にある,互いに固定された質量 mk (k = 1, 2, · · · , n) の n 個の質点から構成されているとする.座標系の原点 O を通り,平面に垂直に固定軸が通っており,この軸 (z 軸と一致)の回りに剛体は自由に回転することができる.点 O と各質点が,伸び縮みせず,質量の無視 できる棒で結ばれているようなものをイメージすればよい(図 6.1 参照). まず始めに,構成要素である各質点の運動を考える.次にこれらの質点の運動の総和を考えて,剛体の 運動を考察する. (k) (k) 質量 mk の質点の位置ベクトルを r (k) = (xk , yk , 0),その質点に働く力のベクトルを F (k) = (Fx , Fy , 0) とおくと,そのベクトル表記の運動方程式は, mk r̈ (k) = F (k) 87 (6.1) である.両辺に左から r (k) とのベクトル積をとることにより,角運動量に関する方程式に書き換える. d (k) (r × ṙ (k) ) = r (k) × F (k) dt (6.2) d (xk ẏk − yk ẋk ) = xk Fy(k) − yk Fx(k) dt (6.3) mk この式は z 成分のみ値を持ち, mk y m2 となる.これを, xk = rk cos θk , F (1) m3 (1) m1 mk x d 2 (k) (r θ̇k ) = rk Fθ dt k (6.5) となる.ここで,rk は原点から質点 k までの距離,θk は質点の O 位置ベクトルが x 軸の正の向きに対してなす角である.又, m4 (k) m5 (6.4) で定義される極座標 (rk , θk ) を用いて表すと, Fθ r1 θ1 yk = rk sin θk , Fθ m6 = −Fx(k) sin θk + Fy(k) cos θk は力 F (k) の角成分である. (導出は,第 5.3.4 節の問題 5.7 を参照) 伸び縮みせず,質量の無視で 質点系が剛体であるということは,各質点の原点からの距離が きる棒で結ばれた,同一平面上にあ 不変であるということと,すべての質点が同じ角速度,角加速度 る6質点系から構成される剛体の例. で回転しているということである.例えば,図 6.1 で,質点 1 が 回転軸は z 軸(紙面に垂直)とする. 質点 2 を追い越すようなことはない.この場合, 図 6.1. ṙk = r̈k = 0, θ̇ = θ̇k , θ̈ = θ̈k , (k = 1, · · · , n) (6.6) である.これに留意すると (6.5) は,すべての質点に共通の回転角 θ を用いて, (k) mk rk2 θ̈ = rk Fθ (6.7) と書き換えられる.ここで rk は時間的に一定であることから,微分記号の外に出した. 剛体の運動は,構成要素の運動の総和である.(6.7) をすべての構成要素について和をとると,固定軸に 関する剛体の角運動量方程式となる. ( ∑ ) mk rk2 θ̈ = ∑ k (k) rk Fθ (6.8) k ここで, I= ∑ mk rk2 (6.9) k は慣性モーメントと呼ばれる,剛体に固有の物理量である.質点系に働く力のモーメントを, ∑ (k) N= r k Fθ (6.10) k とおく.そうすると,固定軸に関する剛体の回転運動の方程式は以下のようにまとめられる. I θ̈ = N. (6.11) ここで,I θ̇ は剛体の角運動量を表す.角運動量の変化は,作用した力のモーメントの総和に等しい. 88 6.1.2 剛体の運動エネルギー (6.11) の両辺に θ̇ を掛けると, d dt ( 1 2 I θ̇ 2 ) = N θ̇ (6.12) 1 I θ̇2 は剛体の回転運動のエネルギーを表す.右辺は,力のモーメントにより単位時間あたりにな となる. 2 される仕事を表す.なお,力が保存力の場合,この項はポテンシャルエネルギーの時間微分の形に変形され る(例えば,後出の問題 6.7, 6.8(ii) を参照) 問題 6.1 n 個の質点系の運動エネルギー K= 1∑ mk (ẋ2k + ẏk2 ) 2 (6.13) k は,(6.4) 式と,剛体としての条件 (6.6) を考慮すると, K= 1 2 I θ̇ 2 (6.14) と表される.これを示せ. 6.1.3 剛体に作用する重力による力のモーメント 鉛直上向きの単位ベクトルを ez とおくと,番号 k の質点に作用する重力のベクトルは −mk gez である から,その力のモーメントは r (k) × (−mk gez ) である. 質点系としての剛体に作用する重力のモーメント N G は,全ての k について 和をとることで, O r (k) NG = ∑ ( r (k) × (−mk gez ) = −g ∑ mk r × ez k k mk ) (k) となる.ここで,剛体の質量 M を,全ての質点の質量の和で定義する. ∑ mk (6.15) M= k ez mk g 又,剛体の重心の位置ベクトルを, rG = 1 ∑ mk r (k) M (6.16) k で定義する.この場合,剛体に作用する重力のモーメントは, N G = −M gr G × ez (6.17) と表される.剛体に働く重力のモーメントは,重心の位置におかれた質量 M の質点に働く重力のモーメン トと等価である.従って,剛体の問題を解く際,重力の作用点は重心と考える. 6.1.4 [1] 慣性モーメント 連続的な質量分布をする平板状の剛体の場合 89 慣性モーメント (6.9) は,デカルト座標系では, ∑ mk (x2k + yk2 ) (6.18) I= y 面要素 k と表される.剛体が,面密度(単位面積あたりの質量)ρ dy r で連続的な物質分布をする場合には,(6.18) の質量∫ mk ∑ は,面要素 dxdy の質量 ρdxdy で,和 は積分 で dx x O 置き換えられて,慣性モーメントは, ∫ I = (x2 + y 2 )ρdxdy k (6.19) で与えられる.特に,密度が一様な場合には,ρ は積分 の外に出すことができる. [2] 棒状の剛体の場合 太さの無視できる棒状の剛体について考える.棒に沿って x 軸をとった時, 固定軸 X1 棒は X1 ≤ x ≤ X2 の範囲に分布するとする.x = 0 の位置に,棒に垂直に固 定軸が通る場合,その慣性モーメントは, ∫ X2 I=ρ x2 dx x 0 X2 (6.20) X1 で定義される.ただし,X1 < 0, 0 < X2 とする.ここで,ρ は線密度,即ち,単位長さあたりの棒の質量 である.簡単のため,棒は一様と仮定し,ρ は定数とした.そのため,ρ を積分の外に出した. 問題 6.2(i) 棒の重心を通り,棒に垂直に固定軸があ 問題 6.2(ii) 棒の一端を通り,棒に垂直に固定軸があ る場合. る場合. 問題 6.2 長さ l, 質量 M で,太さの無視できる一様な棒がある.この棒について, (i) 固定軸は棒に垂直で,棒の重心を通る場合, (ii) 固定軸は棒に垂直で,棒の一端を通る場合, それぞれの場合の慣性モーメントを求めよ. 【解答】 − 2l 0 x 0 l 2 (i) 棒の重心を通り,棒に垂直に固定軸がある場合. x l (ii) 棒の一端を通り,棒に垂直に固定軸がある場. (i) 積分区間は,棒の一端 x = − 2l から他端 x = 2l までとなるから,慣性モーメント I は, ∫ 2l x2 dx I=ρ − 2l 90 (6.21) で与えられる.ここで,ρ = M は線密度である.(6.21) は以下のように計算される.ここで,積分区間が l 対称であるので,被積分関数が偶関数であることを利用する. ∫ l 2 I = 2ρ 0 [ 1 x dx = 2ρ x3 3 2 ] 2l = 0 1 3 ρl 12 最後に線密度を代入すると, 1 M l2 12 I= (6.22) となる. (ii) 積分区間が,棒の一端 x = 0 から他端 x = l に変わることを除き,問 [1] と同様である.ただし,積分 区間は対称ではない. ∫ I [3] I = ρ = [ 1 x dx = ρ x3 3 ]l 2 0 ∴ l = 0 1 3 ρl 3 1 M l2 3 (6.23) 長方形の平板の場合 a a 固定軸 固定軸 b 問題 6.3(i) 長方形の板の重心を通り,板に垂直に固 b 問題 6.3(ii) 長方形の板の長さ b の辺の中心を通り, 定軸がある場合. 板に垂直に固定軸がある場合. 問題 6.3 辺の長さが a, b の,一様で厚さの無視できる質量 M の長方形の板について, (i) 板に垂直で重心をとおる固定軸に関する慣性モーメント, (ii) 板に垂直で長さ b の辺の中心をとおる固定軸に関する慣性モーメント, を求めよ. 【解答】 y (i) この長方形の面積は ab であるから,面密度は, b 2 ρ= M ab y dy − a2 O 固定軸 − 2b a 2 x となる. 固定軸が通る長方形の中心を原点として,長さ a の辺に平行に x 軸を,長さ b の辺に平行に y 軸をとる.この場合,長方形の範 a b b 囲は,− a 2 ≤ x ≤ 2 , − 2 ≤ y ≤ 2 となる.その慣性モーメント I 91 は,2重積分, ∫ ∫ b 2 I=ρ a 2 dy − 2b (x2 + y 2 )dx −a 2 で与えられる. 2重積分の計算法は,次のようになる.最初に y を定数とみなして,x について積分する.この時,与 a えられた y について,x の積分区間は,図に示した網がけの範囲 − a 2 ≤ x ≤ 2 である.ここで,積分区間 が対称であるので,被積分関数が偶関数であることを利用する. ∫ I = ∫ b 2 2ρ − 2b ∫ ∴ I = a 2 dy b 2 ∫ (x2 + y 2 )dx = 2ρ ( − 2b [ − 2b 0 2ρ b 2 1 3 x + y2 x 3 ] a2 ∫ b 2 dy = 2ρ − 2b 0 [ ( ) ] 1 a 3 a + y2 dy 3 2 2 ) a a3 + y 2 dy 24 2 次に,y について積分する.y についての積分区間は − 2b ≤ y ≤ 2b である.ここで,積分区間が対称であ るので,被積分関数が偶関数であることを利用する. [ ) [ 3 ]b ( )3 ] ∫ 2b ( 3 a a 2 a a 3 2 a3 b a b I = 4ρ + y dy = 4ρ y+ y = 4ρ + 24 2 24 6 48 6 2 0 0 ∴ I = 1 ρab(a2 + b2 ) 12 最後に面密度を代入すると, I= 1 M (a2 + b2 ) 12 (6.24) となる. 三角形の平板の場合 [4] 45◦ 45◦ a a 45◦ 45◦ 固定軸 固定軸 a 問題 6.4(i) 直角二等辺三角形の直角の角を通り,板 a 問題 6.4(ii) 直角二等辺三角形の角度 45◦ の角を通 に垂直に固定軸がある場合. り,板に垂直に固定軸がある場合. 問題 6.4 等辺の長さが a で質量が M の,一様で厚さの無視できる直角二等辺三角形の板がある. (i) 直角の角を通り,板に垂直に固定軸がある場合, (ii) 角度 45◦ の角を通り,板に垂直に固定軸がある場合, 92 それぞれについて,慣性モーメントを求めよ. 【解答】 2 三角形の直角をなす等辺の長さは a であるから,面積は a2 とな る.よって,面密度 ρ は, y a ρ= 45◦ 2M a2 である. (i) 直角の角を原点として,直角をなす一辺に沿って x 軸を,直角を y なす他辺に沿って y 軸をとる.慣性モーメントを与える2重積分は, 最初に y を固定して考え, x について積分した後,y について積分 45◦ -y+a O a x することにする.この時,与えられた y について,x の積分区間は, 左図に示した網がけの範囲である.その始点は x = 0 で,終点は 斜 辺 y = −x + a である.よって,x の積分区間は,0 ≤ x ≤ −y + a となる.y についての積分区間は 0 ≤ y ≤ a である.従って,慣性モーメント I は,以下の2重積分で与 えられる. ∫ ∫ a I=ρ −y+a dy 0 (x2 + y 2 )dx 0 この積分は,以下のように順次計算される. ]−y+a ] ∫ a[ ∫ a[ 1 1 3 2 3 3 2 dy = ρ x +y x − (y − a) − y + ay dy I = ρ 3 3 0 0 0 ここで,(y − a)3 の項は展開せずに,この形のまま積分するのがよい. ]a [ 1 4 a 3 1 4 I = ρ − (y − a) − y + y 12 4 3 0 [( ) ( )] 1 4 1 4 1 4 1 = ρ − a + a − − a = ρa4 4 3 12 6 積分区間の終点 y = a だけでなく,始点 y = 0 の値も存在することに留意する. 最後に面密度を代入すると, y I= a 1 M a2 3 となる. 45◦ (ii) 角度 45◦ の角を原点として,直角をなす一辺に沿って x 軸を, 直角をなす他辺に平行に y 軸をとる. y 慣性モーメントを与える2重積分は,最初に y を固定して考え, x について積分した後,y について積分することにする.この時,与 45◦ O y a x えられた y について,x の積分区間は,左図に示した網がけの範囲 である.x についての積分区間の始点は斜辺 y = x で,終点は x = a である.よって,x の積分区間は,y ≤ x ≤ a となる.y について の積分区間は 0 ≤ y ≤ a である.従って,慣性モーメント I は,以下の2重積分で与えられる. ∫ a ∫ a I=ρ dy (x2 + y 2 )dx 0 y 93 この積分は,以下のように順次計算される. ]a ) ) ∫ a( 3 ∫ a( ∫ a[ 1 3 a 1 3 4 3 a3 2 2 3 2 x +y x =ρ + ay − y − y dy = ρ − y + ay + dy I = ρ 3 3 3 3 3 0 0 0 y [ ]a ( 4 ) 1 a a a3 a4 a4 1 = ρ − y4 + y3 + y = ρ − + + = ρa4 3 3 3 0 3 3 3 3 最後に,面密度の値を代入すると, I= 2 M a2 3 となる. 問題 6.5 半径 a, 質量 M の,一様で厚さの無視できる円板の慣性モーメントを求めよ.固定軸は円板に垂 直で円板の中心を通るとする. 【解答】 結果のみを示す. I= 1 M a2 2 (6.25) 固定軸のある剛体の運動の例 6.1.5 固定軸 固定軸 重力 θ 固定軸 Mg 問題 6.6. 一端を固定さ 動摩擦力 初速度 v0 問題 6.7 の初期条件. 問題 6.8. 粗い床に接して回転 れた棒. 問題 6.9. 定滑車. する円板. 問題 6.6 長さ l, 質量 M で,太さの無視できる棒の一端を固定し,鉛直下方からわずかな角度だけ傾けてから離 したとする.この時,この棒は単振動をするが,その角振動数を求めよ. 6.7 長さ l, 質量 M で,太さの無視できる棒の一端を固定して吊す.棒の下端にどれだけの速度を与えれ ば,棒をちょうど水平の位置まで昇らせることができるか. 6.8 半径 a, 質量 M の,厚さの無視できる円板がある.これを,動摩擦係数 µ′ の粗い水平面の上で,その 円周が面に接するようにして,その中心を通る軸の回りに回転させる.時刻 t = 0 で円板の角速度が ω0 であったとして,円板が止まるまでに要する時間と回転角を,以下の2通りの方法により求めよ. (i) 回転運動の方程式を直接解く方法. 94 (ii) 全エネルギーの保存則を用いる方法. 6.9 半径 a, 質量 M の,厚さの無視できる円板の中心に,円板に垂直に軸を通し,鉛直面内におく.この 円板に糸を巻き付け,糸の端に質量 m のおもりをつける.時刻 t = 0 において,糸が巻かれる向きに 円板に角速度 ω0 を与えた時,円板が止まるまでにおもりはどれだけ上昇するかを,以下の2通りの方 法により求めよ. (i) 回転運動の方程式を直接解く方法. (ii) 全エネルギーの保存則を用いる方法. 【解答】 問題 6.6 O 固定軸のある点を原点 O とし,鉛直下向きに x 軸,水平右向きに y 軸をと y る(z 軸は紙面に垂直で,内から外へ向かう向き).更に,鉛直下方から反時 θ G 計回りにはかった棒のなす角を θ とおく.この場合,重心の位置ベクトルは, (l ) l 2 cos θ, 2 sin θ, 0 , 重力のベクトルは,F G = (M g, 0, 0) で,重力によ ( ) る力のモーメントは,r G × F G = 0, 0, − 2l M g sin θ となる.よって,回転 rG = 運動の方程式は以下のようになる. 1 l M l2 θ̈ = − M g sin θ 3 2 Mg x (6.26) ここで,一端を固定された棒の慣性モーメントが 31 M l2 であることを用いた. 力のモーメントの項に負号が付くのは,重力による力のモーメントが時計回りに(角度 θ を減少させる向 きに)作用するからである. 特に,θ が微小な場合には,sin θ ∼ θ と近似できる.この場合,(6.26) は, 1 l M l2 θ̈ = − M gθ, 3 2 従って, θ̈ = − 3g θ 2l (6.27) と近似される.この方程式は,単振動を表す方程式 (3.1) と同じ形をしている.従って,θ が微小な場合の 運動は単振動となる.この方程式の解法については, 「一般力学 I」の「0.2.3 2階常微分方程式」を参照の こと.ここでは結果のみを示しておく.振動の角振動数 ω0 は, √ 3g ω0 = 2l である. 問題 6.7 問題 6.6 と異なり,回転角は最大で π 2 となり,微小ではないので,sin θ ∼ θ と近似することはできない. この場合には,運動方程式 (6.26) を直接解くのはむずかしい.ここでは, 「一般力学 I」の「2.2 エネルギー」 でやったことと同様の手順で,全エネルギーの方程式を導出し,全エネルギーが保存することを示した上 で,全エネルギーの保存則を適用して問題を解くことにする. 95 固定軸に関する回転運動の方程式 (6.26) の場合,両辺に角速度 θ̇ を掛けると,以下のように全エネルギー の方程式を導出することができる. 1 M l2 θ̇θ̈ 3 d dt ( 1 M l2 θ̇2 6 ) l = − M g θ̇ sin θ, 2 l d = − Mg 2 dθ (∫ ) dθ sin θdθ · , dt d dθ l = − M g (− cos θ + U0 ) · , 2 dθ dt l d = − M g (− cos θ + U0 ), 2 dt ∴ [ ] d 1 1 2 2 M l θ̇ + M gl(− cos θ + U0 ) = 0. dt 6 2 1 M gl(− cos θ + U ) の項が,重力によるポテンシャルエネ ここで U0 は積分定数である.左辺 [· · · ] 内の 2 0 ルギーを表す.θ = 0 でポテンシャルエネルギーが 0 となるように基準を決めると,U0 = 1 と定まる.従っ て,上式は, [ ] 1 d 1 M l2 θ̇2 + M gl(1 − cos θ) = 0 dt 6 2 (6.28) 1 M l2 θ̇2 と,重力によるポテンシャルエネルギー と表される.この式は,棒の回転運動のエネルギー 6 1 M gl(1 − cos θ) の和で定義される全エネルギー, 2 1 1 (6.29) E = M l2 θ̇2 + M gl(1 − cos θ) 6 2 が保存することを意味する. 棒が最下点にある状態 θ = 0, θ̇ = ω0 (ω0 は初期の角速度)と,水平に達した状態 θ = π 2 , θ̇ ≥ 0 の間で 全エネルギー (6.29) が変化しないことより,等式, 1 1 1 M l2 ω02 = M l2 θ̇2 + M gl 6 6 2 2 2 が成り立つ.これを 1 6 M l θ̇ について解く. 1 1 1 M l2 θ̇2 = M l2 ω02 − M gl 6 6 2 1 2 2 棒が水平な状態 θ = π 2 に達するためには,この状態での運動エネルギーが正値 6 M l θ̇ ≥ 0, 即ち, 1 1 M l2 ω02 − M gl ≥ 0 6 2 でなければならない.これより,初期の角速度に必要な条件は, √ 3g ω0 ≥ l となる.これを棒の端における速度に換算すると, √ lω0 ≥ 3gl である. 問題 6.8(i) 96 y 固定軸の通る重心を原点 O とし,水平右向きに x 軸,鉛直上向きに y 軸 をとる(z 軸は紙面に垂直で,内から外へ向かう向き).更に,水平右向き 固定軸 O から反時計回りにはかった回転角を θ とおく.初期の回転の向きは反時計 θ x Mg Q ′ µ Mg 回りと仮定する. この場合,円板と水平面との接点 Q の位置ベクトルは,r Q = (0, −a, 0), 動摩擦力のベクトルは,F f = (−µ′ M g, 0, 0) である.ここで,動摩擦力の 大きさは,抗力 M g に比例し,µ′ M g である(比例係数が動摩擦係数 µ′ ). 円板の回転による速度は,接点では正(右向き)であるから,動摩擦力は それと逆向きに作用し負(左向き)となることに注意する. 動摩擦力による力のモーメントは,r Q × F f = (0, 0, −aµ′ M g) となる. (固定軸は重心を通っているので, 重力による力のモーメントは考えない. )よって,回転運動の方程式は以下のようになる. 1 M a2 θ̈ = −aµ′ M g 2 ここで,重心に関する円板の慣性モーメントが 1 2 2Ma (6.30) であることを用いた.動摩擦力は回転を妨げる向き に作用するので,力のモーメントの項には負号が付く. (6.30) を整理した形で表す. θ̈ = − 2µ′ g a (6.31) これを時間について積分し,t = 0 で θ̇ = ω0 なる初期条件を適用すると, θ̇ = ω0 − 2µ′ g t a (6.32) となる.(6.32) を時間について更に積分し,t = 0 で θ = 0 なる初期条件を適用すると, θ = ω0 t − µ′ g 2 t a (6.33) となる. 円板が停止する時,θ̇ = 0 であるから,停止する時刻 ts は,(6.32) より, ts = ω0 a 2µ′ g (6.34) となる.停止時の回転角 θs は,(6.34) を (6.33) に代入して, θs = ω02 a 4µ′ g (6.35) となる. 問題 6.8(ii) 上で示したように,この問題では回転運動の方程式を直接解くことができるが,全エネルギーの保存則 を利用することもできる.ただし,ここでのポテンシャルエネルギーは重力のポテンシャルエネルギーでは ない. (6.30) の両辺に θ̇ を掛けると,動摩擦力によるモーメント µ′ M ga が一定であることにより,以下の方程 式が得られる. d dt ( 1 M a2 θ̇2 + µ′ M gaθ 4 97 ) = 0. 2 2 ′ これは,回転運動のエネルギー 1 4 M a θ̇ と,ポテンシャルエネルギー µ M gaθ の和で定義される全エネ ルギー, E= 1 M a2 θ̇2 + µ′ M gaθ 4 (6.36) が保存することを示す.初期の状態 θ = 0 で θ̇ = ω0 であることより,全エネルギの値が, E= 1 M a2 ω02 4 と定まる.初期の状態と任意の状態(回転角 θ, 角速度 θ̇)との間で,全エネルギーが等しいことより,等式, 1 1 M a2 θ̇2 + µ′ M gaθ = M a2 ω02 4 4 (6.37) が成り立つ. 停止した状態 θ̇ = 0 における回転角 θs は,(6.37) より, 1 M a2 ω02 = µ′ M gaθs 4 (6.38) を満たす.これより θs は,(6.35) のように求めることができる. 停止する時刻は (6.37) を用いて,別に求める必要がある.この手順は, 「2.2 エネルギー」の「2.2.2 もう ( )2 1つのエネルギー方程式」で説明した解法と同様である.まず,(6.37) を θ̇2 = dθ について解く. dt ( )2 ( ) dθ 4µ′ g ω02 a = − θ dt a 4µ′ g ここで,角速度は常に正で, dθ > 0 であるから, dt √ √ 4µ′ g ω02 a dθ = · −θ dt a 4µ′ g となる.これを,左辺を変数 t のみ, 右辺を変数 θ のみが含む,変数分離形に変形する. √ a dθ dt = ·√ 2 ω0 a 4µ′ g 4µ′ g − θ 左辺を t について,右辺を θ について積分する. √ ∫ dt = ∫ a · 4µ′ g √ dθ ω02 a 4µ′ g −θ √ √ a ω02 a · −θ+C t = −2 4µ′ g 4µ′ g ここで C は任意定数である.t = 0 で θ = 0 なる初期条件を適用すると, C= ω0 a 2µ′ g と定まる.従って,与えられた初期条件を満足する解は, √ √ a ω02 a ω0 a t = −2 · −θ+ ′ ′ 4µ g 4µ′ g 2µ g 98 (6.39) となる. (6.39) の θ に (6.35) で与えられる停止時の角度を代入すると,停止時の時刻 (6.34) が得られる. 問題 6.9 固定軸の通る重心を原点 O とし,水平右向きに x 軸,鉛直上向きに y 軸をとる.更に,水平右向きから 反時計回りにはかった円板の回転角を θ とおく.初期の回転の向きは反時計回りとする. この場合,円板と糸の接点の位置ベクトルは,r Q = (a, 0, 0), 糸の張力のベクトルは,張力の大きさを T とお くと,下向きに作用するから,F T = (0, −T, 0) である.張力による力のモーメントは,r Q ×F T = (0, 0, −aT ) となる. (固定軸は重心を通っているので,重力による力のモーメントは考えない. ) 一方,おもりには,重力の他,作用・反作用の法則により,大きさ T で,反対の上向きに糸の張力が作 用する.初期のおもりの位置を原点 Om として,鉛直上向きを正としたおもりの座標を Y とおく. 以上のことを考慮すると,円板の回転運動の方程式,おもりの運動方程式は y 以下のようになる. θ O Q x 1 M a2 θ̈ = −aT, 2 (6.40a) mŸ = T − mg. (6.40b) 更に,糸が伸び縮みしない(おもりが上昇しただけ糸が円板に巻きとられる) ことにより,関係式 T Y = aθ (6.41) が成立する.この関係式は次のように解釈することもできる.円板の円周上の 任意の点の座標 (x, y) と角度 θ の間には, x = a cos θ, T y = a sin θ, なる関係がある.これを時間微分すると, Y ẋ = −aθ̇ sin θ, mg Om ẏ = aθ̇ cos θ, であるから,円板と糸の接点 Q (θ = 0) における円板の速度は, ẋ = 0, ẏ = aθ̇, となる.円板と糸の間に滑りがないためには,接点での円板の速度の y 成分 aθ̇ と,おもりの上昇に伴う糸 の速度 Ẏ は等しくなければならない.即ち, Ẏ = aθ̇ (6.42) が成り立つ.これを積分すると,(6.41) になる. 問 (i) (6.41) を (6.40a) に代入して,T について解くと, 1 T = − M Ÿ 2 99 (6.43) が得られる.これを (6.40b) に代入すると, Ÿ = − 2m g M + 2m (6.44) が得られる.これを,t = 0 で Ẏ = aω0 なる初期条件のもとで積分すると, Ẏ = aω0 − 2m gt M + 2m (6.45) が得られる.これを,t = 0 で Y = 0 なる初期条件のもとで更に積分すると, Y = aω0 t − m gt2 M + 2m (6.46) が得られる. 円板が停止する時刻 ts は,(6.45) 式で Ẏ = 0 となる時刻を求めればよく, ts = M + 2m aω0 · 2m g (6.47) となる.この時のおもりの座標 Ys は ts を (6.46) に代入して, Ys = (M + 2m)a2 ω02 4mg (6.48) と求まる. 剛体の平面運動 6.2 次に,更に複雑な運動の例として,剛体は平板状又は棒状であるが固定軸は存在せず,従って,その重心 も運動できるような場合について考える.円板が転がる運動や棒が倒れる運動が,このような運動の例で ある. 6.2.1 運動方程式 y 最初に,剛体の平面運動を支配する方程式を導出する. y’ この過程で,剛体の平面運動は,その重心の並進運動と, 重心のまわりの回転運動に分解して記述されることが示さ れる. θ Y O’ 剛体系 O 静止系 X 平板状の剛体は xy 平面上にあり,x 軸を含む水平面上 x’ を回転しながら運動している (y 軸は水平面に垂直).この 座標系 Oxy 系は,運動する剛体に対して静止しているこ x とから,静止系と呼ぶ.静止系から見た剛体の重心 O′ の 座標を (X, Y ) と置く.更に,この重心を原点とする別の 座標系 O′ x′ y ′ 系をとる.O′ x′ y ′ 系は運動する剛体に固定 図 6.2: 剛体の平面運動を記述する 2 種類の座 した座標系であることから,剛体系と呼ぶ.静止系の x 軸, 標系. y 軸と剛体系の x′ 軸, y ′ 軸はそれぞれ平行で,向きも同じ になるように選ぶ. 第 6.1.1 節と同様,剛体は,互いに固定された質量 mk (k = 1, · · · , n) の n 個の質点から構成されている とする.剛体の一構成要素である質点 k の静止系に関する座標を (xk , yk ), 剛体系に関する座標を (x′k , yk′ ) 100 とおくと, xk = X + x′k , yk = Y + yk′ . (6.49) である.静止系に関する重心の定義(ベクトル表記では (6.16) 式)より, X= 1 ∑ mk xk , M Y = k である.ここで,M = ∑ 1 ∑ mk yk , M (6.50) k mk は剛体の質量である.又,剛体系の原点は重心に一致するので,剛体系に関 k する重心は, ∑ mk x′k = k ∑ mk yk′ = 0 (6.51) k である. (k) (k) 質点 k に働く力の成分を (Fx , Fy ) とおくと,静止系に関する質点 k の運動方程式は, mk ẍk = Fx(k) , (6.52a) mk ÿk = Fy(k) , (6.52b) となる.(6.52) をすべての構成要素について和を取リ,重心の定義 (6.50) を適用することにより,剛体の運 動方程式が得られる. M Ẍ = ∑ Fx(k) , (6.53a) Fy(k) . (6.53b) k M Ÿ = ∑ k これは,剛体の重心の並進運動を記述する. 質点 k の運動方程式 (6.52) に座標変換 (6.49) を適用すると,剛体系に関する運動方程式に書き換えら れる. mk ẍ′k = Fx(k) − mk Ẍ, (6.54a) mk ÿk′ = Fy(k) − mk Ÿ . (6.54b) ここで,右辺第 2 項は,剛体系の原点が加速度 (Ẍ, Ÿ ) で加速度運動をしていることによる生じる,慣性の 力を表す.即ち,静止系は慣性系であるが,剛体系は慣性系ではない. x′k ×(6.54b)− yk′ ×(6.54a) より,剛体系に関する質点 k の角運動量方程式が得られる. d [mk (x′k y˙k ′ − yk′ x˙k ′ )] = (x′k Fy(k) − yk′ Fx(k) ) − mk (x′k Ÿ − yk′ Ẍ) dt (6.55) この式を,すべての構成要素について総和をとると,剛体系に関する剛体の角運動量方程式が得られる. ∑ d ∑ mk (x′k y˙k ′ − yk′ x˙k ′ ) = (x′k Fy(k) − yk′ Fx(k) ), dt k k なお,慣性の力のモーメントは,総和をとると,(6.51) より 0 となるので,式には現れない. 101 (6.56) ここで,剛体系において極座標 x′k = rk cos θk , yk′ = rk sin θk を導入すれば,第 6.1.1 節と同様の議論か ら,(6.56) は (6.8),従って,(6.11) と同じ形の式, I θ̈ = N (6.57) に帰着する.ここで,θ は,剛体系の x′ 軸の正の向きから反時計回りにはかった剛体の回転角を表す.又, ∑ ′2 I= mk (x′2 k + yk ), k N= ∑ (x′k Fy(k) − yk′ Fx(k) ), k はそれぞれ,重心に関する慣性モーメント,重心に関する力のモーメントの総和である. 平面上を運動する剛体の運動方程式は,このように,重心の並進運動の方程式 (6.53) と,重心に関する 角運動量の方程式 (6.57) に分離することができる.すなわち,剛体の平面運動は,重心の並進運動と,重 心の回りの回転運動とに分けて考えることができる.式の形が同じことからわかるように,重心の回りの 回転運動は,重心に固定軸のある剛体の回転運動と同様の取り扱いをすることができる. 問題 6.10 静止系に対する剛体の運動エネルギー K= 1∑ mk (ẋ2k + ẏk2 ) 2 k は,剛体系の原点を剛体の重心に選ぶと, K= 1 1 M (Ẋ 2 + Ẏ 2 ) + I θ̇2 2 2 のように,重心の並進運動のエネルギー(右辺第1項)と,重心の回りの回転運動のエネルギー(右 辺第2項)の和として表すことができる.これを示せ. 6.2.2 剛体の平面運動の例 1 – 円板の運動 – 本節では,最も簡単な剛体の平面運動の例として,粗い y 平面の上を転がる円板の運動について考える.この問題は, y’ 固定軸の回りの円板の運動(例えば,問題 6.8)と比較し て,かなり複雑である.円板が平面の上を,滑りながら運 P 動する場合と滑らずに運動する場合とがあるからである. θ Y x’ O’ Q O 座標系 X x 円板は,半径が a, 質量が M で,一様と仮定する.こ 2 の場合,慣性モーメントは,I = 1 2 M a である.最初に, 粗い水平面上の運動を考える.水平面の動摩擦係数を µ′ とする. 静止系 Oxyz 系として,水平面上に原点 O をおき,水平方向(図の右向き)に x 軸を,鉛直方向(図の 上向き)に y 軸を,紙面に垂直で,内から外へ向かう向きに z 軸をとる.これとは別に,剛体系 O′ x′ y ′ z ′ 系として, 剛体の重心に原点 O′ をおき,x 軸,y 軸,z 軸と平行にそれぞれ x′ 軸,y ′ 軸,z ′ 軸をとる.円 板上の任意の点の,静止系から見た座標 (x, y, 0) と,剛体系から見た座標 (x′ , y ′ , 0) との間には, x = X + x′ , y = Y + y′ 102 (6.58) なる関係がある.ここで (X, Y, 0) は静止系から見た重心 O′ の座標である. 回転角の定義 剛体系に対して極座標系をとる.円周上の任意の点 P(x′ , y ′ ) の,x′ 軸の正方向に対するなす角を θ とす ると, x′ = a cos θ, y ′ = a sin θ (6.59) と表される.θ は,反時計回りの回転を正とするように定義されることに注意する. 接点の速度 点 P の静止系から見た座標は,(6.58) に (6.59) を代入すると, x = X + a cos θ, y = Y + a sin θ (6.60) と表される.この点の静止系から見た速度を求める.水平面上の運動では,重心は x 方向にのみ運動する ので,Ẏ = 0 である.よって, ẋ = Ẋ − aθ̇ sin θ, ẏ = aθ̇ cos θ (6.61) となる.円板と水平面との接点 Q (θ = −π/2) における速度は従って, ẋ = Ẋ + aθ̇, (6.62) ẏ = 0, となる.円板は接点 Q から離れることはないので,ẏ = 0 は自明である.一方,関係式 (6.62) は重要な意 味を持つ. 滑りの有り無しの定義 円板と水平面との接点 Q の速度 (6.62) が 0 でない,即ち,Ẋ + aθ̇ ̸= 0 の場合,滑りがある.滑りが ある場合,接点において動摩擦力が作用する. 逆に,Ẋ + aθ̇ = 0 の場合,滑りがない.滑りがない場合,接点において未知の大きさの摩擦力が作用す る.この摩擦力は最大摩擦力より小さい. [1] 滑りがある場合 円板と平面の間に抗力 R に比例した動摩擦力 µ′ R が働く.ここで, 面が水平の場合には抗力は重力と等しく,R = M g である.動摩擦力 θ̇ の向きは円板が進む向きと逆向きである.重心の並進運動の方程式は, Mg Ẋ M Ẍ = −µ′ M g (6.63) となる.ここで,円板は x 軸の正の向きに進むと仮定した. µ′M g 接点の速度 Ẋ + aθ̇ 6= 0 図.滑りがある場合の円板の運動. 重心は右向きに運動すると仮 接点 Q の剛体系に関する位置ベクトルは,r ′Q = (0, −a, 0), 動摩擦力 のベクトルは,F f = (−µ′ M g, 0, 0) であるから,動摩擦力による力の モーメントは,r ′Q × F f = (0, 0, −aµ′ M g) となる.よって,重心の回 りの回転運動の方程式は, 1 M a2 θ̈ = −aµ′ M g 2 定.回転の向きは,実際の回 転の向きではなく,角速度の 定義で正の向きを示す. (6.64) となる.未知の変数は X, θ の 2 つで,運動方程式は (6.63), (6.64) の 2 式なので,初期条件を与えれば,問題を解くことができる. 103 [2] 滑りがない場合 上で述べたように,滑りがない場合, Ẋ + aθ̇ = 0 (6.65) である.円板と平面の接点は瞬間的に静止しているので,円板と平面の間には,動摩擦力ではなく,未知の 大きさの摩擦力が働く.この摩擦力の大きさを F とおく.円板は x 軸の正の向きに進むと仮定すると,摩 擦力は円板が進む向きと逆向きの負の向きに作用する.この場合,重心の並進運動の方程式は, M Ẍ = −F (6.66) となる. 摩擦力のベクトルは,F f = (−F, 0, 0) であるから,摩擦 θ̇ = 力による力のモーメントは,r ′Q × F f = (0, 0, −aF ) となる. − Ẋa Ẋ = −aθ̇ よって,重心の回りの回転運動の方程式は, Mg 1 M a2 θ̈ = −aF 2 (6.67) となる. F 未知の変数が X, θ の他に F と,滑りがある場合と比べて 接点の速度 Ẋ + aθ̇ = 0 未知の変数が 1 つ多い.しかし,運動方程式 (6.66), (6.67) の 図.滑りがない場合の円板の運動.重心は右 2 式に加えて,滑りなしの条件式 (6.65) がつくので,F の値 向きに運動すると仮定.回転の向きは, を求めることができ,初期条件を与えれば,問題を完全に解 この場合の実際の回転の向きを示す. くことができる. なお,実際の運動において,滑りが生じるか生じないかは, 与えられた初期条件によって決まる(問題 6.11 参照). 問題 6.11 半径 a, 質量 M の一様な円板を,動摩擦係数 µ′ の粗い水 平面で運動させる. [1] 重心の並進運動の初速度を u0 ,重心の回りの回転の初角速度 を ω0 とした時,u0 > 0(右向きに進行),ω0 > 0(反時計 回りに回転)と仮定すると,最初は水平面の上を滑りながら α 転がる.この場合,円板と水平面の間に滑りが無くなるまで に要する時間を求めよ.更に,滑りが無くなった時の重心の 図 6.3. 問題 6.12 斜面上の円板の運動. 並進運動の速度を求めよ. [2] 円板と水平面の間に滑りが無くなった以降の円板の運動につ いて,摩擦力の大きさと,重心の並進運動の速度を求めよ. 6.12 半径 a, 質量 M の一様な円板を,水平面に対して α の角度をなす粗い斜面の上に静かにおく(図 6.3 参照).斜面の静止摩擦係数を µ, 動摩擦係数は µ′ として,以下の問に答えよ. [1] 円板が斜面上を滑ることなく転がるために必要な,角度 α に対する条件を求めよ.更に,この場合の円 板の運動を述べよ. [2] 円板が斜面上を滑りながら転がる場合について,円板の運動を述べよ. [3] 問 [1], [2] それぞれの場合について,全エネルギーの保存が成立するか否かを調べよ. 104 6.2.3 剛体の平面運動の例 2 – 棒の運動 – 問題 6.13 滑らかな水平な床の上に,質量 M , 長さ l の一様な棒が,床 と α の角度をなして支えられている(図 6.4 参照).支えを 取り去ると,棒は床の上を滑りながら,倒れる. [1] 棒の一端が床から離れないと仮定して,棒が床と任意の 角度 θ をなす時の,角速度 θ̇ を求めよ. [2] 棒の一端が床から受ける抗力を, θ の関数として求めよ. この結果を用いて, 「棒の一端が床から離れない」という 仮定が成り立つかどうかを検討せよ. α 6.14 上と同じ問題で,だだし,床が粗い場合を考える. [1] 棒の一端と床の接点が動かないと仮定して,角度 θ の時 の角速度 θ̇ を求めよ. 図 6.4. 問題 6.13, 6.14 棒の運動. [2] 棒の一端が床から受ける抗力と摩擦力を, θ の関数とし て求めよ.この結果を用いて, 「棒の一端と床の接点が動かない」という仮定が成り立つかどうかを 検討せよ.ただし,床の静止摩擦係数を µ とする. 【問題 6.13 の解答】 座標系 y 図に示すように,水平な床の上に原点 O をおき,水平方向(図 y’ の右向き)に x 軸を,鉛直方向(図の上向き)に y 軸をとる.更 に,棒の重心 O′ を原点として,x 軸,y 軸に平行で同じ向きに, 剛体系の x′ 軸,y ′ 軸をとる. (z 軸,z ′ 軸は紙面に垂直で,内か ら外へ向かう向き) O’ Y R x’ 棒の重心の座標を (X, Y, 0),x 軸の正の向きに対する棒の傾 Mg き角を θ(反時計回りの回転を正と定義)とおく.棒が床から受 ける抗力を R とおくと,摩擦力は作用していないから,重心の θ O Q X 運動方程式 x 並進運動の方程式は, M Ẍ = 0, (6.68a) M Ÿ = R − M g, (6.68b) となる.(6.68a) の意味は次のようになる,摩擦がないため,x 方向には力が作用しない.従って,初速度 が 0 の場合,重心の x 座標,X は運動の過程で変化しない. 剛体系から見た棒と床の接点 Q の位置ベクトルは,r ′Q = F R = (0, R, 0) であるから,抗力による力のモーメントは r ′Q に関する棒の慣性モーメントは 1 2 12 M l ( ) − 2l cos θ, − 2l sin θ, 0 , 抗力のベクトルは ( ) × F R = 0, 0, − 2l R cos θ となる.重心 であるから,重心の回りの回転運動の方程式は, l 1 M l2 θ̈ = − R cos θ 12 2 105 (6.69) となる. (抗力によるモーメントは θ を減少させる向きに作用するので,負号が付く. ) 束縛条件 棒の一端は床から離れないと仮定すると,関係式 Y = l sin θ 2 (6.70) l θ̇ cos θ 2 (6.71) が成り立つ.これを時間微分すると, Ẏ = である. エネルギー方程式 (6.68b) の両辺に Ẏ を掛けると,重心の並進運動のエネルギーと重心の位置エネルギーの和で表される エネルギーに関する方程式が得られる. ) ( d 1 2 M Ẏ + M gY = RẎ dt 2 (6.72) 抗力 R は時間の関数なので,左辺の時間微分の中へ入れることはできないことに注意する.先に述べたよ うに,初速度が 0 の場合,X は定数となるから,運動のエネルギーの表式に入ってこない. 一方,(6.69) の両辺に θ̇ を掛けると重心の回りの回転運動のエネルギーに関する方程式が得られる. ( ) d 1 l M l2 θ̇2 = − Rθ̇ cos θ (6.73) dt 24 2 (6.72)+(6.73) より, d dt ( 1 1 M Ẏ 2 + M gY + M l2 θ̇2 2 24 ) ) ( l = R Ẏ − θ̇ cos θ 2 となる.右辺は,抗力が単位時間当たりになす仕事を表す.(6.71) を右辺へ適用すると, ( ) d 1 1 M Ẏ 2 + M gY + M l2 θ̇2 = 0 dt 2 24 (6.74) に帰着する.この式は,重心の並進運動のエネルギーと重心の位置エネルギーと重心の回りの回転運動の エネルギーの和で定義される全エネルギー, E= 1 1 M Ẏ 2 + M gY + M l2 θ̇2 2 24 (6.75) が保存することを示す.棒は床から離れないため,棒と床の接点は y 方向に運動しない.このため,抗力 がなす仕事は 0 となり,全エネルギーが保存する.(6.70), (6.71) を用いて, Y, Ẏ を θ, θ̇ で書き換えると, 全エネルギー (6.75) は, E= 1 1 l M l2 θ̇2 cos2 θ + M l2 θ̇2 + M g sin θ 8 24 2 と書き換えられる. 角速度の解 106 (6.76) 始状態 θ = α, θ̇ = 0 と,任意の θ, θ̇ の状態の間で全エネルギー (6.76) が等しいことより,等式, 1 l l 1 M l2 θ̇2 cos2 θ + M l2 θ̇2 + M g sin θ = M g sin α 8 24 2 2 (6.77) が成り立つ.これを θ̇2 について解くと, θ̇2 = 12g sin α − sin θ · l 3 cos2 θ + 1 (6.78) となる. 抗力 抗力 R を θ の関数として求める. 最初に,θ̈ を θ の関数として求める.(6.78) を時間微分すると, ( ) 12g d sin α − sin θ · 2θ̇θ̈ = · θ̇ l dθ 3 cos2 θ + 1 より, ∴ ( sin α − sin θ 3 cos2 θ + 1 ) 6g − cos θ(3 cos2 θ + 1) + (sin α − sin θ) · 6 cos θ sin θ · l (3 cos2 θ + 1)2 θ̈ = 6g d · l dθ θ̈ = 6g cos θ(−4 + 6 sin α sin θ − 3 sin2 θ) · l (3 cos2 θ + 1)2 = (6.79) となる. 次に,重心の並進運動の加速度 Ÿ を θ の関数として求める.棒の端が床から離れない条件式 (6.71) を 更に時間微分すると, l (θ̈ cos θ − θ̇2 sin θ) 2 である.これに (6.78), (6.79) を代入する. [ ] l 6g cos2 θ(−4 + 6 sin α sin θ − 3 sin2 θ) 12g sin θ(sin α − sin θ) Ÿ = · − · 2 l (3 cos2 θ + 1)2 l 3 cos2 θ + 1 Ÿ = (6.80) これを分子には sin θ のみが含まれるように整理すると, Ÿ = 3g · −4 − 2 sin α sin θ + 9 sin2 θ − 3 sin4 θ (3 cos2 θ + 1)2 となる. 最後に,抗力 R を θ の関数として求める.上式を重心の並進運動の方程式 (6.68b) に適用する. R = M (Ÿ + g) = −12 − 6 sin α sin θ + 27 sin2 θ − 9 sin4 θ + (3 cos2 θ + 1)2 (3 cos2 θ + 1)2 これを整理すると,R が θ の関数として以下の形に求まる. R = Mg · 4 − 6 sin α sin θ + 3 sin2 θ 3(sin θ − sin α)2 + 4 − 3 sin2 α Mg · 2 2 (3 cos θ + 1) (3 cos2 θ + 1)2 (6.81) これより,α ≥ θ ≥ 0 の範囲で R > 0 であることがわかる.即ち,θ = α で運動を開始してから,θ = 0 で床に到達するまでの間,棒の一端は床から離れないことがわかる.従って,設問の仮定は成立する. 【問題 6.14 の解答】 座標系 図に示すように,棒と床の接点を原点 O とし,水平方向(図の右向き)に x 軸を,鉛直方向(図の上向 き)に y 軸をとる.更に,問題 6.13 と同様に剛体系を定義する. 107 運動方程式 y y’ 全問と同様,棒の重心の座標を (X, Y, 0),x 軸の正の向きに対 する棒の傾き角を θ とおく.棒が床から受ける抗力を R ,摩擦 力を F とおくと,重心の並進運動の方程式は, θ O’ Y R x’ Mg M Ẍ = F (6.82a) M Ÿ = R − M g (6.82b) となる.棒は倒れる時,左向き(−x 方向)に動こうとするので, 摩擦力は右向き(+x 方向)に働くことに注意する. O F X x ( 剛体系から見た棒と床の接点 O の位置ベクトルは,r ′O = ) − 2l cos θ, − 2l sin θ, 0 , 抗力のベクトルは F R = (0, R, 0),摩擦 力のベクトルは F f = (F, 0, 0) であるから,抗力による力のモー ( ) メントは r ′O × F R = 0, 0, − 2l R cos θ , 摩擦力による力のモーメ ) ( ントは r ′O × F f = 0, 0, 2l F sin θ となる.従って,重心の回り の回転運動の方程式は, 1 l l M l2 θ̈ = − R cos θ + F sin θ 12 2 2 (6.83) となる. 束縛条件 棒は接点 O から動かないと仮定すると,関係式 l cos θ, 2 Y = l sin θ 2 (6.84) l Ẋ = − θ̇ sin θ, 2 Ẏ = l θ̇ cos θ 2 (6.85) X= が成り立つ.これを時間微分すると, である. エネルギー方程式 (6.82a)×Ẋ+ (6.82b)×Ẏ より,重心の並進運動のエネルギーと重心の位置エネルギーの和で表されるエ ネルギーに関する方程式が得られる. [ ] d 1 2 2 M (Ẋ + Ẏ ) + M gY = RẎ + F Ẋ dt 2 (6.86) 抗力 R や摩擦力 F は時間の関数なので,左辺の時間微分の中へ入れることはできないことに注意する. 一方,(6.83) の両辺に θ̇ を掛けると重心の回りの回転運動のエネルギーに関する方程式が得られる. ( ) d 1 l l 2 2 M l θ̇ = − Rθ̇ cos θ + F θ̇ sin θ (6.87) dt 24 2 2 (6.86)+(6.87) より, ] ( [ ) ( ) l 1 l d 1 2 2 2 2 M (Ẋ + Ẏ ) + M gY + M l θ̇ = R Ẏ − θ̇ cos θ + F Ẋ + θ̇ sin θ dt 2 24 2 2 108 となる.右辺第 1 項は抗力,右辺第 2 項は摩擦力が単位時間当たりになす仕事を表す.ここで (6.85) を右 辺へ適用すると, [ ] d 1 1 2 2 2 2 M (Ẋ + Ẏ ) + M gY + M l θ̇ = 0 dt 2 24 (6.88) に帰着する.この式は,重心の並進運動のエネルギーと重心の位置エネルギーと重心の回りの回転運動の エネルギーの和で定義される全エネルギー, E= 1 1 M (Ẋ 2 + Ẏ 2 ) + M gY + M l2 θ̇2 2 24 (6.89) が保存することを示す.棒は接点 O から動かないため,抗力,摩擦力いずれも仕事をしない.その結果,全 エネルギーは保存する.(6.84), (6.85) を用いて, Y, Ẋ, Ẏ を θ, θ̇ で書き換えると,全エネルギー (6.89) は, E= l 1 M l2 θ̇2 + M g sin θ 6 2 (6.90) と書き換えられる. 角速度の解 始状態 θ = α, θ̇ = 0 と,任意の θ, θ̇ の状態の間で全エネルギー (6.90) が等しいことより,等式, 1 l l M l2 θ̇2 + M g sin θ = M g sin α 6 2 2 (6.91) が成り立つ.これを θ̇2 について解くと, θ̇2 = 3g · (sin α − sin θ) l (6.92) となる. 抗力と摩擦力 問題を解く際,棒の一端は接点 O から動かないと仮定した.これは,抗力 R が正値であり,かつ,摩 擦力の大きさ |F | が最大静止摩擦力 µR よりも小さければ満足される.このことを確かめるため,R 及び F を θ の関数として求め,更に,比 |F |/R と静止摩擦係数 µ との大小関係を調べる. 最初に,θ̈ を θ の関数として求める.(6.92) を時間微分すると, 2θ̇θ̈ = 3g d · (sin α − sin θ) · θ̇ l dθ より, θ̈ = − 3g cos θ 2l (6.93) となる. 次に,重心の並進運動の加速度 Ẍ, Ÿ を θ の関数として求める.棒の一端は動かない条件式 (6.85) を更 に時間微分すると, l l Ẍ = − θ̈ sin θ − θ̇2 cos θ, 2 2 Ÿ = l l θ̈ cos θ − θ̇2 sin θ, 2 2 109 である.これに (6.92), (6.93) を代入し,整理すると, Ẍ = 3 g cos θ(3 sin θ − 2 sin α), 4 Ÿ = 3 g(3 sin2 θ − 2 sin α sin θ − 1), 4 が得られる. 最後に,抗力 R と摩擦力 F を θ の関数として求める.上式を重心の並進運動の方程式 (6.82) に適用す ると,R と F が θ の関数として以下の形に求まる. R= 1 1 M g(9 sin2 θ − 6 sin α sin θ + 1) = M g[(3 sin θ − sin α)2 + cos2 α] 4 4 (6.94a) F = 3 M g cos θ(3 sin θ − 2 sin α). 4 (6.94b) これより,α ≥ θ ≥ 0 の範囲で R > 0 で,運動を開始してから床に到達するまでの間,棒の端は床から離 れないことがわかる.一方,F は θ が初期値 α から減少するに従い減少し,ある θ で負になる.即ち,θ が減少すると,摩擦力は右向きから左向きに向きを変える. 「棒の一端と床の接点が動かない」,言い換えれば,棒と床の間に滑りが生じないという仮定が成り立つ ためには,α ≥ θ ≥ 0 の範囲で,|F | < µR を満足していなければならない.このことを確かめる. 比 |F |/R の θ 依存性を α が α = 30◦ , 60◦ , 90◦ の 3 ケースについて示すと,図 6.5 のようになる.仮に, 静止摩擦係数を µ = 0.5 とする. α = 90◦ の場合,初期に |F |/R = 0 であるから |F | < µR を満足し,滑 ることなく運動が始まる.しかし,θ ∼ 38◦ で |F |/R = 0.5 となり,滑りが生じる.それ以降の運動では, 動摩擦力が作用し,接点が動くため,動摩擦力によりエネルギーが失われ,全エネルギーは保存しなくな る.この場合,ここで示した解法は無効となる.α = 60◦ の場合,同様に,初期に |F |/R = 0.40 であるか ら,滑ることなく運動が始まる.しかし,θ ∼ 32◦ で |F |/R = 0.5 となり,滑りが生じる.一方,α = 30◦ の場合,初期に |F |/R = 0.74 であるから,|F | > µR で,最初から滑りが生じる. いずれの場合も,初期又は途中で滑りが生じる.即ち,α ≥ θ ≥ 0 の範囲で「棒の一端と床の接点は動 かない」という仮定は成り立たないことがわかる. 110 図 6.5. 摩擦力の大きさと抗力の比 |F |/R の θ 依存性.初期の角度が,α = 30◦ (破線), α = 60◦ (一点 鎖線), α = 90◦ (実線) の 3 つの場合.µ = 0.5 について,滑りが生じる θ を矢印で示した.ただし, α = 30◦ の場合,初期から滑りが生じるので,矢印は示していない. 111
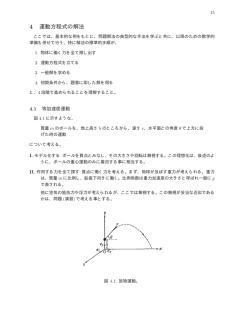
© Copyright 2026 Paperzz