4.DCモータの制御
4.1
モータ概要
(1)身のまわりのモータ
モータは,身のまわりの様々なところで使われている.
「モータの使用量は文化的生活のバロメータ」
・モータの生産量
・モータの発明者
・電流の三大作用
・エネルギー変換
500万個/日
直流機--グラム(発電機の接続違いから:1873)
誘導機--実用化:テスラ←→直流機実用化:エジソン
①発熱作用(ジュール熱)
②化学作用
③磁気作用 →モータに利用
モータは唯一の電気-機械エネルギー変換装置
(2)モータの分類
表4-1
同期型モータ
直流モータ
モータの分類
自励モータ
他励モータ
交流モータ
非同期型モータ
(誘導型モータ)
特殊モータ
マグネットモータ
整流子モータ
直巻モータ
分巻モータ
複巻モータ
マグネットモータ(ブラシ付き)
マグネットモータ(ブラシレス)
ステッピングモータ
単相(直巻,反発)
三相(直巻,分巻)
単相誘導モータ
(くま取りコイル型,コンデンサ運転型,コンデンサ始動型,分相始動型)
三相誘導モータ
ヒステリシスモータ
電気力モータ 超音波モータ
静電モータ
振動モータ
ボイスコイルモータ
この表では一般と違い,同期,非同期を最初に分類している.
同期とは,界磁磁束と回転子の動きが一致していることをいい,非同期とは,それぞれの動きにずれが
あることをいう.それぞれ,線形制御,非線形制御となる.
直流モータ,交流モータそれぞれにマグネットモータがあるように,パワーエレクトロニクスなどの発達
により,DC(直流)モータ,AC(交流)モータといった単純な分類は難しくなってきている.分類中でブ
ラシレスモータやステッピングモータは,厳密には直流モータとはいい難い.
4.2
モータの基礎原理
(1)モータに関係する電磁気学の法則
モータに関連する電磁気学の法則は以下の3つである.
①フレミングの左手の法則(iBl則)
②フレミングの右手の法則(vBl則)
③ファラデーの電磁誘導の法則
- 53 -
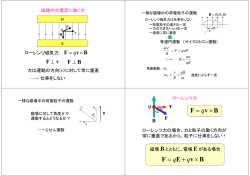
(2)フレミングの左手の法則(iBl 則)
磁界中の導体に電流iを流したとき,電流と磁界が垂直とすれば,以下の力が導体に働く.
F
iBl
i
F
B
図4-1 フレミングの左手の法則
(3)フレミングの右手の法則(vBl 則)
磁界中を導体が運動するとき,運動方向と磁界が垂直とすれば,以下の誘導起電力が導体に生じる.
e
vBl
B
l
e
v
x
0
図4-2 フレミングの右手の法則
(4)ファラデーの電磁誘導の法則
コイルに鎖交している磁束が変化するとき,以下の誘導起電力がコイルに生じる.
d
dt
e
図4-3 ファラデーの電磁誘導の法則
(5)3つの法則の関連性
たとえば,磁束密度Bの中をvなる速度で運動する物体には,フレミングの右手の法則より
E
v B
なる電界が観測される.もしその運動する物体が電荷eを帯電しているとすると,その物体には
F
eE
なる力が働く.すなわち
F
ev B
ところが
ev
i
と考えてよいから
F
i B
となり,フレミングの左手の法則が同時に成り立つ.
フレミングの左手の法則,フレミングの右手の法則,ファラデーの電磁誘導の法則の3法則は異な
った現象を表しているが,以上のように,互いに関連した法則であるといえる.したがって現実の
物理的な系では,これらが複雑にからみ合い,同時に関連し合って起こるのが普通である.
このことは電気モータでは大きな意味を持つ.
- 54 -
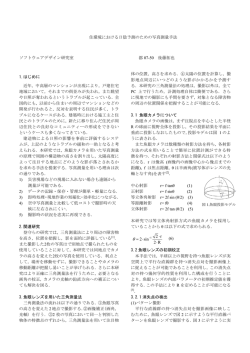
(6)電気モータにおける3法則
(a)モータのトルク
下図において,永久磁石による磁界の磁束密度をB,電流をI,コイルの有効長さをl とすれば,発生す
るトルクは
T
Fr sin
BIlr sin
である.
安定位置からの角度q をトルク角という.q =90゜の位置が最も効率がよい.
この式から,トルクT は電流I に比例していることがわかる.このことはモータを制御する場合に重要な意
味を持つ.なぜなら,発生するトルクを制御するためには電流のみを制御すればよく,しかも線形制御
でよいからである.
図4-4
モータの原理
(b)逆起電力
上図において,コイル(回転子)が角速度 w で回転しているとする.このとき,コイルに誘導される起電
力の大きさは
e
vBl
Blr sin
である.そしてその向きは,レンツの法則より磁束変化を妨げる電流の流れる方向であるから,図に書
かれている電流の向きとは逆向きの電流の流れる方向,すなわちモータを回すために流す電流を妨
げる方向である.したがって,この起電力を逆起電力または速度起電力という.
この起電力は,外部からや内部からを問わず,単にモータを回すことによって生じるものであるから,
発電機においても重要な意味を持つ.
(c)モータにおける逆起電力の意義
前項まで述べた,モータにおける関係式
T Fr sin
e vBl
BIlr sin
Blr sin
において,共通部分を消去すると
T
∴T
ei
ei
これがモータの基本式である.左辺はモータの機械的出力(トルク×回転数)であり,右辺はモータの
電気的入力(電圧×電流)であるから,この式はモータが,電気エネルギーを運動エネルギーに変換
する,変換器であることを示すものである(発電機では入出力が逆).
したがって,逆起電力という一見邪魔に見える現象(実際邪魔な場合もある)が,実はモータにとって
は非常に重要な意味を持っていることがわかる.
- 55 -
4.3
モータに要求される能力
(1)モータが備えるべき要件
①始動,停止,逆転,制動が連続的にかつ効率よくできること.
②応答性が早いこと.
③正転時,逆転時の特性が同一であること.
④運転特性が安定で,周囲環境の影響を受けないこと.
⑤保守が容易か,無保守でよいこと.
⑥耐環境性に優れ,軽,薄,短,小を満たすこと.
モータは基本的にはトルク(力)を発生させる機械であり,連続してトルクを発生できることが要求される.
また,発生するトルクに脈動などの変動がないことも重要である.その他も含めて,モータに要求される
性能を大きく分けると以下のようになる.
①トルクの連続性
②トルクの安定性
③始動性
④回転数の安定性
(2)トルクの連続性
モータには,時間的に連続してトルクを発生できることが要求される.
電磁石を応用したソレノイドアクチュエータ(ソレノイド)のように,通電すると決まった位置に移動して止
まるといった動きでは,連続して動力を取り出すことができない.
また,回転子の機械的な位置に関係なく,トルクを発生できる必要がある.
(3)トルクの安定性
モータのトルクの安定性に対する要求は,モータの取り付けられる機械の精度に,大きく左右される.
したがって,要求される安定性の程度は機械によって異なってくる.極端な例を挙げれば,回りさえす
ればよい用途では,安定性はほとんど必要ない.逆に精密工作機械では,トルク変動はほとんど許さ
れない.
トルクの安定性を損なうものとしては,脈動トルクの発生や発熱によるトルク低下などが挙げられる.
(4)始動性
モータを使用する場合に,はじめに外から回してやらないと指定した方向に回らないのでは,とても使
いづらい.
モータの始動性は,本質的ではないが,使う立場からは非常に重要な性能である.
(5)回転数の安定性
回転数の安定性は,回転数の制御性と読み替えてもよい.
例えば,インダクションモータ(誘導電動機)のように,すべり率によっては負荷増大とともに回転数が
上がってしまうといった性質や,直巻きモータのように,負荷が無くなると無限大まで回転が上がってし
まうといった性質は,回転数の安定性の意味では好ましくない.
(6)DCモータはなぜ回るのか
回転力(トルク)を連続して発生することが必要.
→電流と磁界の位置関係を保つ.
①導体の回転に合わせて磁界を回転させる
②導体の回転に合わせて電流を切り替える
③磁界の回転に合わせて導体を回転させる
④磁界の回転に合わせて電流を切り替える
- 56 -
①‥‥‥インダクションモータ
②‥‥‥DCマグネットモータ
④‥‥‥ACマグネットモータ
導体の回転に合わせて電流を切り替える動作はブラシとコミュテータが行う.
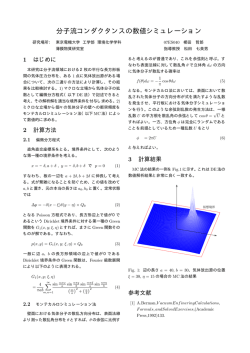
(7)ブラシとコミュテータの働き
ブラシとコミュテータの働きは整流作用である.
電源
(直流)
整流作用
電機子コイル
(交流)
AC同期モータ
DCモータ
図4-5
4.4
原理は同じ
整流作用
DCモータ
(1)励磁方式による分類
電磁力 = 電流 × 磁界
電流--電機子コイル
磁界--界磁コイル
「励磁」:界磁コイルに電流を流して磁束を発生させること
他励式
励磁方式
自励式
------- マグネット(PM)モータも他励電動機
|
直巻式
永久磁石
分巻式
複巻式
自励:発電機としたときに外部電源が不要なため(ただし,初めは必要,後は残留磁気)
複巻電動機は,直巻電動機では危険な用途に用いることが多い.
- 57 -
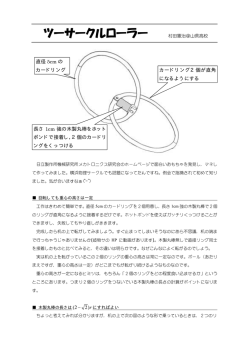
(2)基本構成
ステータ
ロータ
エンドベル ブラシキャップ
モータカバー
後ベアリング
出力シャフト
タコジェネレータのロータ
オイルシール
タコジェネレータのブラシ
前ベアリング
タコジェネレータのステータ
フランジ
マグネット
ポールシュー
図4-6
ブラシ
コミュテータ
DCモータの構造
・固定子(ステータ):永久磁石(マグネット)
・回転子(ロータ):電機子(電機子コイルと鉄心),整流子(,シャフト)
(3)等価回路と関係式
(a)等価回路
ia
Ra
La
Rf
ω
va
Lf
e
T,J
図4-7 DCモータの等価回路
(b)関係式(直流の値は大文字)
①トルク
T KT I a
KT :トルク定数[Nm/A]
②逆起電力
E KE
KE :逆起電力定数[Vs/rad]
③電機子コイル
va
dia
Raia e
dt
Ra I a E (実用等価回路) La
Va
④界磁コイル
v f
Vf
Lf
di f
Rf if
dt
R f I f (実用等価回路) - 58 -
if
vf
(c)トルク定数と逆起電力定数の関係
以前の式
T Fr sin
e vBl
BIlr sin
Blr sin
と比較すると,
KT
KE
Blr sin
であり,トルク定数と逆起電力定数は等しい.
→トルクと逆起電力は密接な関係にあり,逆起電力の大きさがそのままトルクの大きさになる.
※BがIf に比例するとすれば,
KT
KE
KIf
(4)DCモータのトルク-速度特性
電機子コイルと逆起電力の式を1つにまとめて,次の式を得る.
Va
R aIa
KE
①
式①を変形して
Va
IR
1 a a
KE
Va
②
また,式①とトルクの式よりIaを消去して
T
KTIa
KEIa
KE
Va
Ra
KE
③
よって,トルク-速度特性は下図となる.
トルク
速度→大:トルク→小
このような特性を
0
図4-8
ω0
速度
DCモータのトルク-速度特性
図4-9
垂下特性
- 59 -
(右下がり)
垂下特性
という.
(5)無負荷速度と制御法
無負荷時の速度を無負荷速度という.
0
Va
KE
Va
KIf
上式より,電機子電圧と界磁電流の二つで制御が可能なことがわかる.
また,先の式を変形すれば,
0
1
Ra
T
KEVa
0
1 kT
k
Ra
KEVa
となり,無負荷速度を制御できれば負荷時にも速度を制御できることがわかる.したがって,速度制御
法としては以下の二つが代表的である.
速度制御法
電機子で制御
界磁で制御
電機子制御法
界磁制御法
(a)電機子制御法
界磁電流一定で,電機子電圧を制御する方法.
電機子電圧に応じて,速度の直線が平行移動する.
外部抵抗を使った抵抗制御法は,低速度の運転に適するが,電機子電流が大きいので損失が大きい
(ラジコンなどがいい例).抵抗制御法は,一般に界磁制御と電機子制御を併用する場合が多い.
抵抗制御法に代わって近年用いられている,パワーエレクトロニクスによる電機子制御法については
次節で説明する.
(b)界磁制御法
電機子電圧一定で,界磁電流を制御する方法.正確には界磁磁束を制御.
外部抵抗を使った,抵抗制御法が一般的.損失は少ないが,速度の制御範囲は狭い.
→磁気飽和など,磁気的な制約がある.
ω0
使用可能範囲
残留磁気
0
磁気飽和
0'
図4-10
界磁制御法
- 60 -
4.5
DCモータの駆動回路
(1)モータドライブ回路の種類
いずれも電機子制御法である.
①一方向
リレー,トランジスタ
②一方向+速度制御
抵抗法,Tr電流制御(困難),FET電圧制御,PWM制御 ← PWM制御以外は損失大
③正逆転,2電源
Tブリッジ
④正逆転,単電源
Hブリッジ
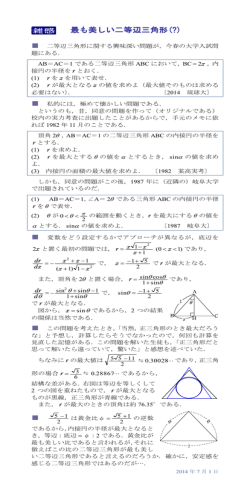
(2)Hブリッジ
Tr1,Tr4:ON(Tr2,Tr3:OFF)→正転
Tr2,Tr3:ON(Tr1,Tr4:OFF)→逆転
ダイナミックブレーキも同じ回路で可能
Tr1,Tr3:ON(Tr2,Tr4:OFF)
あるいは
Tr2,Tr4:ON(Tr1,Tr3:OFF)
でダイナミックブレーキがかかる
アームの上下の素子が同時にONになら
ないように,切り替え時にはデッドタイム
を入れること
図4-11
Hブリッジ
(3)チョッパ回路
(a)チョッパとは
直流電動機の制御を行うためには,符号も含めた電圧の制御が不可欠である.最も簡単な方法である
抵抗制御法は,外部抵抗での損失が大きく,応答性もあまりよくない.直流電圧の制御には,古くから
種々の方法が用いられてきているが,今日ではパワーエレクトロニクス技術が全面的に採用されている.
一定電圧の直流電源から,可変電圧を作り出す方法として,チョッパがある.
チョッパは,トランジスタなどのスイッチング作用を利用して,ONとOFFを繰り返すことにより,出力の平
均電圧を制御するものである.チョッパは,損失が小さく,応答性もよいことから,電動機の制御のほと
んどに用いられている.
(b)チョッパの原理と方式
ONとOFFを繰り返す方法として,以下の3種類がある.
①ON時間一定,OFF時間可変
②ON時間可変,OFF時間一定
③周期一定,ON時間(OFF時間)可変
- 61 -
S
T1
VS
vR
R
T2
T1
一定 可変
T2
T1
可変 一定
T2
可変
一定(T )
原理図
①
②
図4-12
③
チョッパ
一般には③の方法が採用されている.
(c)デューティファクタ
上の回路で下図のようにスイッチをON-OFFするとし,vR の平均電圧をVR とすると,
vR
VS
VR
0
T1 T
図4-13
VR
T1
VS
T
VS
(0
t
デューティファクタ
1)
a をデューティファクタ(通流率,変調率,デューティ比)という.
デューティファクタ(デューティ比)を変化させることにより,出力の平均電圧を0 ~ VS の範囲で変化さ
せることができる.
(4)PWMによるモータ制御
(a)PWMとは
Pulse Width Modulation(パルス幅変調)の略であり,元々は通信技術の一つである.
したがって,厳密には交流を扱う場合に用いられる用語(狭義)であるが,モータ駆動技術に応用され
てからは,チョッパ回路を用いるモータ駆動方法全般を指す(広義)言葉になっている.
PWM(パルス幅変調)・・・パルスの幅を信号に応じて変化させること
PWM用の回路・・・・・・・チョッパ回路
・参考(いずれも通信技術)
AM(振幅変調)・・・信号に応じて搬送波の振幅を変化させること
FM(周波数変調)・・信号に応じて搬送波の周波数を変化させること
PCM(パルスコード変調)・・信号に応じてパルスコード(符号)を変化させること
(b)PWMの方式
PWM
(広義)
単極性
両極性
(狭義)
両振幅形
片振幅形
先の原理図が単極性のチョッパ回路である.
- 62 -
--回路構成が簡単
--最も効率がよい,回路は少し複雑
(c)両極性(両振幅形)
vR
VS
S1
S3
vR
VS
VR
0
R
S2
T1 T
t
S4
-VS
図4-14
両振幅形
図はHブリッジ形で描いている.
S1とS2,S3とS4はそれぞれ相補的に(一方がONの時は他方がOFF)動作している.
それぞれ,
S1,S4---T1:ON, T1~T:OFF
S2,S3---T1:OFF,T1~T:ON
とすると,
VR
T 1VS
(T
T
T 1)VS
(2
1)VS
(0
1)
(d)両極性(片振幅形)
片振幅形の波形は以下のようになる.
図4-15
VR
T1
VS
T
VS
( 1
片振幅形
1)
※aには電源の符号も含まれていることに注意.
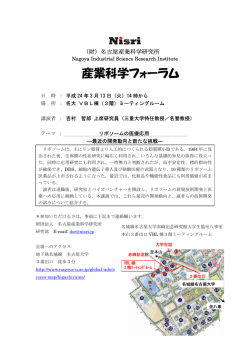
デューティファクタと平均出力電圧の関係は下図となる.
VS
単極性
片振幅形
-1
0
0.5
1
α
両振幅形
-V S
図4-16
デューティファクタと平均出力電圧の関係
- 63 -
(e)PWM使用上の注意
Trの飽和領域がスイッチのONに相当し,しゃ断領域がOFFに相当する.したがって,A点とB点を交互
に行き来することにより,ONとOFFを交互に繰り返すことができる.
飽和領域
IC
V CC
R
A
活性領域(遷移領域)
負荷線
しゃ断領域
B
0
V CC
V CES
図4-17
I B =0
V CE
トランジスタの動作
A点とB点は損失が少ないが,間の部分は損失が大きい.
また,Trは瞬時にON-OFFするわけではない.
→tON,tOFFは0ではない.
図4-18
ON時間,OFF時間
したがって,PWM周波数には上限がある.
また,Trの上側(ハイサイド)と下側(ローサイド)の切り換えには両方OFFの時間(デッドタイム)が必要
である.
○PWM周波数上限(参考)
大電流パワーTr ---1~5kHz程度
小電流Tr---10kHz程度
パワーFET
---20~30kHz程度
- 64 -
4.6
DCモータの制御
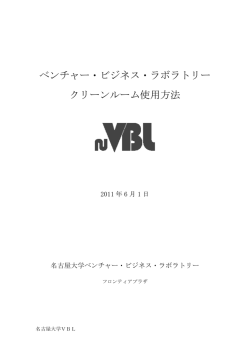
(1)モータボード
モータに関する基本的な実習を行うためのボード.ボード上には,ステッピングモータ,DCモータ,RC
サーボモータがそれぞれ1個づつ搭載されている.コネクタJ1,J2,およびジャンパピンJP1,JP2を介し
て,「カメレオンAVR指南」ボードと接続して利用することができる.図4-19に概観とカメレオンAVR指
南ボードとの接続配線図を示す.
図4-19
モータボードの概観とカメレオンAVR指南ボードとの接続
モータボードで使用しているモータの型番は以下の通り.
表4-2
モータボード
部品一覧
品名
ステッピングモータ
型名,仕様
日本パルスモータ製 PFC25-24C1
DCモータ
日本サーボモータ(株) DME25BA
RCサーボモータ
GWS社製 GWSMICRO/STD/F
- 65 -
(2)サンプルプログラム
タイマ/カウンタ0の位相基準PWM動作を用いてDCモータを速度制御する.PWM出力のデューティ比
はトグルスイッチ8ビットで変化させる.
#include
#include
リスト4-1 DCモータ制御(dcmotor)
<avr/io.h>
<avr/interrupt.h>
ISR( TIMER0_COMP_vect )
{
OCR0 = ( PING &0x1F )|( PINE &0xC0 )|(( PINE &0x04) <<3 );
if( PINB &0x10 )
PORTB = PORTB | 0x80;
//DCモータON
else
PORTB = PORTB & 0x7F;
//DCモータOFF
}
int main()
{
PORTG = 0x1F;
DDRG = 0x00;
PORTE = 0xC4;
DDRE = 0x00;
DDRB = 0x90;
//DCモータ(PB7),OC0(PB4)出力
TCCR0 = 0x66;
TIMSK = 0x02;
//位相基準PWM,OC0出力,256分周
//比較一致割り込み許可
sei();
while(1);
}
○課題3
1.講義資料内のサンプルプログラム(dcmotor)を打ち込み,実習ボード上で動作を確認せよ.
【レポート課題】(提出:ソースリスト&フローチャートやPADなど)
2.DCモータの速度を以下のように変化させるプログラムを作成せよ.
速度
0
時間
1秒程度
- 66 -
© Copyright 2026 Paperzz