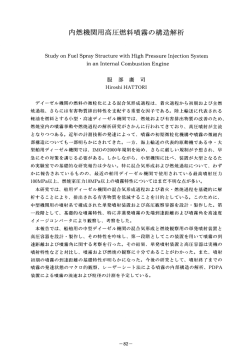
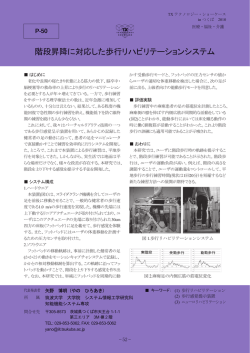
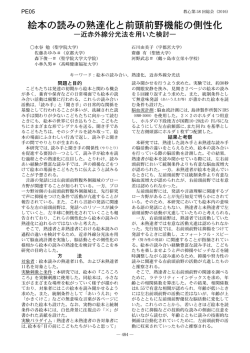
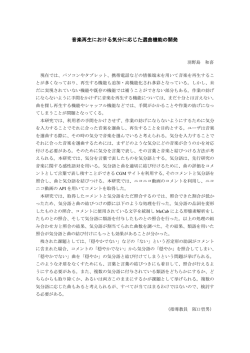
M−24 PICマイコンを用いた教材の開発 鹿子 隼己 1.緒言 3.製作した教材 PICマイコンとは,頭脳部分であるCPUと,それにつな がるROM,RAM,そして入力/出力の周辺回路などが一つ のチップに組み込まれているものである.昔は高価で形 も大きく開発が難しい存在だったが、最近はワンチップ マイコンが安く入手できる時代となった.そのため,PIC マイコンを活用するための技術の習得が求められるよう になってきた. 本研究では,PICマイコンのプログラミングの学習を効 率的に行うために必要となる教材開発を目的とする. 3.1 評価ボード プログラムを書き込んだPICを回路に搭載する前に,動 作チェックを行うことを目的とした評価ボードの製作を 行った.仕様は以下の通りである. ・ 入力用スイッチは12個. ・ 出力確認用LEDは12個. ・ I/Oピンは入出力どちらにも設定可能. ・ ポートAはプルダウンする ・ ポートBは内部でプルアップをする 回路図を図2に,概観を図3にそれぞれ示す. 2.PICマイコンについて 2.1 PICマイコンの特徴 安くて使いやすいワンチップマイコンとしてポピュ ラーなのがPIC(Periperal Interface Controller)マイコ ンで,米国のマイクロチップテクノロジーが開発した小 型マイクロコントローラである.PICマイコンには,以下 に記すような特徴がある. ・ ROM,I/O,8bitRAMが内臓されている. ・ 命令が35個と少ない. ・ 動作電圧に幅があり,低消費電力 ・ I/Oピンの出力電流が大きい. ・ 動作が高速である(10MHzで1サイクル0,4μs) ・ 安価である. 2.2 PIC16F84Aについて PICマイコンには様々な種類があり,用途や回路の規模 などによって使い分けることができる. 本研究では,以下のような理由からPIC16F84Aを主に用 いる. ・ 電気的書き込み,消去が容易であり,何度も繰り返 し行うことができる. ・ 多くの教本で取り上げられているため,学習が容易 である. ・ PIC16F84Aは特殊な機能をほとんど持たず,外部との 入出力ポートがデジタル入出力に限定され,ピン構 成も単純なため初心者の学習に適している. ピンの配置は図1のようになっており,I/Oピンはポー トAに5本,ポートBに8本の計13本ある. 図1 PIC16F84A配置図 図2 評価ボード回路図 図3 評価ボード外観 プログラム上で設定することによって,ポートBは内 部でプルアップすることができる.この機能を利用する ため,ポートBはプルアップすることにした. プルアップする回路では,入出力設定を入力にした場 合,出力用LEDが常に点灯することになり,消費電力が 大きくなってしまう.そこで,内部プルアップの機能が ないポートAはプルダウンすることにした. RA4ピンは出力がオープンドレインアウトプットと なっており,出力ピンとして使用する場合にはプルアッ プをしなければならないので,今回の評価ボードでは RA4は使用しないことにした. 動作チェック用のプログラムを書き込んだPICを使って 動作テストをした結果.プログラムの動作をすることを 確認できた. 3.2 モータコントロール回路 評価ボードではできないモータの制御をするため, モータドライバICを用いて,モータコントロール回路を 製作した.プッシュスイッチが2つあり,スイッチの入 力状況により,正転,逆転,ブレーキ,無回転の4つの 動作を制御する.モータコントロール回路の回路図を図 4に,外観を図5に示す. 5.マニュアルの作成 本研究で作成した教材のマニュアルを作成した.また, PICマイコンを使った作品づくりに必要な知識を,機械科 の学生が理解しやすいようにまとめた.ひとつひとつの 動作に対し,サンプルプログラムを作成し,回路図は図 6のように必要な部分だけを記すようにした.主な動作 内容としては以下のような構成となっている. ・LEDの点灯 ・スイッチの入力 ・タイマを用いたLED点滅 ・ビットシフト命令 ・論理演算 ・加算減算 ・比較演算 ・センサからの入力 ・モータ制御 本年度行われた電気工学実験で,うまく動作しなかっ たセンサの動作確認や,プログラム面,回路面でのミス についても原因を究明し,マニュアルに記すことにした. 図4 モータコントロール回路の回路図 図6 スイッチ入力説明用回路図 6.結言 図5 モータコントロール回路の外観 テスト用プログラムを用いて動作テストを行った.逆 起電力によるモータドライバICの破損を防ぐため,回転 方向に変化が生じる場合には,プログラム上でブレーキ をかけるようにした.モータドライバICを破損すること なく予定通りの動きを実現できた. PWM制御をするため,プログラムを変更して動作テスト を行った.デューティ比の変化に応じて,回転速度を変 えることができた. 表1 入力と出力の対応表 スイッチ入力1 0 0 1 1 スイッチ入力2 0 1 0 1 出力 無回転 正転 逆転 ブレーキ 本年度の電気工学実験の授業を行ってみて,機械科の 学生の電子回路に対する知識や,プログラムの理解度の 低さを感じた.少ない授業時間数で仕上げることや,回 路およびプログラムについてもっと興味を持てるように, 効率的に学習できる教材が必要であると感じた. 今回,作成した教材およびマニュアルが来年度の電気 工学実験の授業に役立ち,機械科の学生が電気に興味を 持ってくれることを期待する. 7.参考文献 ・ わかるPICマイコン制御 遠藤敏夫著 誠文堂新光社 ・ PICマイコンではじめる作って遊べるロボット工作 後閑 哲也著 技術評論者 ・ FIRST PICk ガイドブック 小川 昇著 ㈱マイクロ アプリケーションラボラトリー
© Copyright 2026 Paperzz