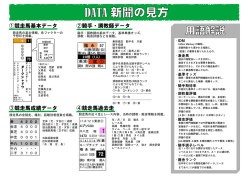
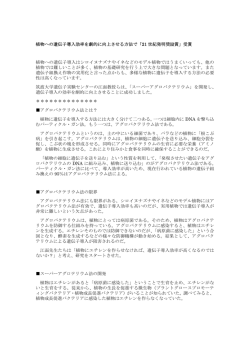
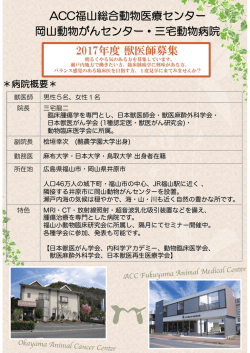
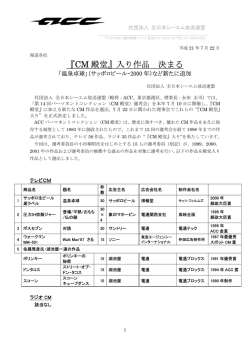
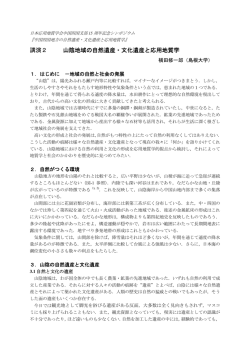
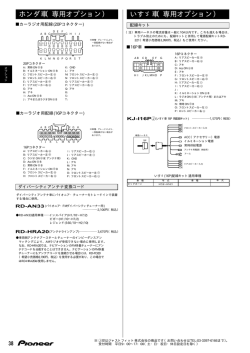
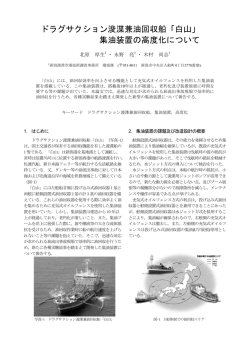
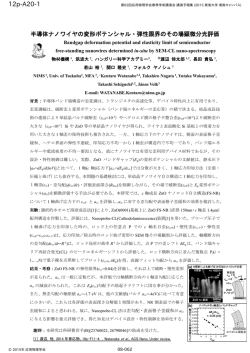
土木技術資料 54-5(2012) ACC車両による高速道路サグ部における渋滞緩和効果 岩﨑 健 * 鈴木一史 ** 坂井康一 * ** 金澤文彦 * *** 1.はじめに 1 Q(交通量) 国 内の都 市間高速 道路にお ける渋 滞の約 6割は S (車頭間隔) 基本S-V式 基本容量 Qc サグ・上り坂部で発生している。これらの渋滞 Kc-1 臨界車頭間隔 要因として、追越車線への車線利用の偏り、 個々のドライバの運転特性のばらつきにより発 Vf KC Kj-1 停止車頭間隔 K (密度) Kj Vf 生する密で構成台数の多い車群の形成、減速波 V (速度) 基本自由流 速度 の 増 幅 ・ 伝 播 、 上 り 坂 部 で の 無 意 識 な 速 度 低 下 、 図-1 三角形近似の Q-K 式(左)基本追従モデによる S-V 式(右) Vi+1 および渋滞発生後の漫然運転などが指摘されて Vi Vi-1 いる。これらの要因に対して、車線利用率適正 大型車 化 サ ー ビ ス や 速 度 低 下 防 止 /回 復 サ ー ビ ス を は じ Si,i+1 めとした情報提供により渋滞緩和に繋がる行動 Smini+1 間 距 離 を 一 定 に 維 持 で き る ACC (Adaptive Cruise Control)機能を搭載した車両(以下ACC車 両)が市販化されている。 ITS研 究 室 で は 、 ITSス ポ ッ ト に よ る 路 車 間 連 携 サ ー ビ ス を 活 用 し た 、 イ ン フ ラ と ACC車 両 の 連携による新たな渋滞対策の確立に向けた研究を 行 っ て い る 。 本 研 究 で は サ グ 部 (こ こ で は 下 り か ら 上 り へ の 縦 断 勾 配 変 化 区 間 を 対 象 と す る )に お け る 現 象 を 対 象 と す る 。 ACC機 能 を 活 用 す る こ とで、勾配変化による速度低下や渋滞発生後の漫 然運転などを抑制・防止することが可能となり、 渋 滞 削 減 効 果 が 見 込 ま れ る 。 し か し 、 ACC車 両 よる渋滞緩和効果を把握するために実施した、ミ クロ交通シミュレーションによる推計結果につい て報告する。なお、本研究では東名高速道路下り 大和サグ(横浜町田ICの下流約2km)を対象とする。 V 図-2 最小車頭 間隔 Smini-1 Vfi V 希望速度 Vfi-1 V 個別車両の S-V式 生 要 因 と し て 、 (1)車 間 距 離 の 比 較 的 長 い 車 両 を 先頭として、密で構成台数の多い車群が形成され る。 (2)車群内の車両が何らかの理由で(サグ部 の場合は勾配の変化)減速した場合、その車両よ り後続の車両の減速度は、反応の遅れが原因で後 方ほど大きくなる(減速波の上流側への増幅伝 播)。さらに、(3)サグ部の上り勾配区間において、 ドライバがその勾配変化に気づかないため、無意 識に速度が低下し交通容量が低下することが報告 されている 2) 。また、(4)渋滞に巻き込まれている 時間が長くなるほど、追従挙動が緩慢となり発進 流率が低下することが報告されている 2) 。 の混入による渋滞削減の効果は未だ明らかとなっ て い な い 。 そ こ で 本 稿 で は 、 ACC車 両 の 混 入 に SCi-1 Smini Vfi+1 るための車両制御技術として、速度に応じて車 S 臨界車頭 間隔 SCi SCi+1 一方で、ドライバの運転時の負担を軽減させ Si-1,i 車頭間隔 S S を促すようドライバに働きかける対策が立案さ れ、一部は実現されている。 小型車 小型車 上記のようなサグ渋滞に特有の挙動も表現でき るシミュレータとするために、実測交通量より得 られたデータより決定される基本追従モデル (lower order model 3 ))に、サグ部における車両 挙動の特徴が表現可能なよう、後述する様々なモ デルを追加した。基本追従モデルの入力データは、 2.ミクロ交通シミュレータの構築 大和サグ部に設置したトラフィックカウンター 2.1 サグ部における運転挙動の表現 交通量より算出されるQ-K式を三角形近似したも (以下サ グ部ト ラカン )より 取得した 。図 -1は 実測 既 往の研 究 1) に よる とサグ 部にお ける 渋滞の 発 ──────────────────────── The Understanding of Congestion Mitigation Effectiveness According to ACC-equipped Vehicles at Sag Section on Expressways の (図 -1左 )と 、 Q-K式 よ り 算 出 さ れ る 基 本 S-V式 (図 -2右 )を示 したも のであ る。また 車線変 更モ デ ル には花房 ら 4) の提 案する 意思決定 プロセ スによ - 30 - 土木技術資料 54-5(2012) るモデルを採用し、車線変更による影響も考慮し たモデルとした。 (1) 構成台数の多い車群の形成 走行時において希望する速度や快適に走行でき る先行車両との間隔はドライバにより異なる。そ の挙動差異による車群の形成を表現するため、全 て の 車両 が基 本 S-V式 を用 い るの でな く、 図 -2に 非ACC車両の挙動 示す様に、車両ごとに臨界車頭間隔と希望速度を 非ACC車 両の流率 付与し、車両ごとのS-V式に従って追従走行する モデルとした。なお、最小車頭間隔は停止時の密 度3.3m(120pcu/km)とした。臨界車頭間隔は、臨 非 ACC車 よ り も 追 従 時における反応が 優 れ る た め 、 ACC車 両 の S-V式 よ り も 、 個 別 車 両 の 基 本 S-V 式に近くなるよう な挙動をする。 ACC車両の流率 界時にサグ部トラカンにより観測されたデータ、 希望速度は閑散時に観測されたデータ、それぞれ 図-3 ACC車両の追従時のS-V(追従履歴) より算出される平均値と分散に合致するよう、車 表-1 IDM+の設定変数 両ごとにランダムに付与した。このモデルにより、 速度の低い車両が先頭となって車群を形成するプ ロセスが表現可能となる。なお大型車と小型車の 混入比率はサグ部トラカンの実測値を使用、車長 は大型車9m、小型車5mとした。 (2) 追従車両の加減速挙動の反応遅れ 追従車両の挙動は先行車両の加減速を認知して 上段:設定値 から動作を開始するため、遅れが生じる。よって 下段:設定根拠 追従車両の加減速は、基 本S-V式 に従わず先行車 両に比べ大きくなる。例えば上り勾配区間では、 先行車が加速した場合、反応が遅れるために、一 (3) サグ部上り勾配区間における速度低下 旦車頭時間が長くなって(交通流率(単位時間あ サグ部の上り勾配区間における、ドライバの無 たりに通過する交通量)が低下する)から基本S- 意識な速度低下を表現するため、上り勾配開始点 V式 に 戻 る よ う な 円 弧 軌 跡 を 描 く ( 図 -3)。 こ の より徐々に(重力加速度の道路縦断勾配方向成 挙 動 を 表 現 す る た め 先 述 の Lower Order Model 分)速度が低下するモデルを追加した。走行速度 に 加 え て 、 Intelligent Driver Model+( 以 下 の低下幅が一定以上になると、ドライバが速度低 IDM+) 5) (式(1))を採用し、加減速度の最大値を 下に気づいたとして、走行速度は希望速度に復帰 規定して いる。 IDM+とは自車速 度、及び先行 車 する。速度低下は自由流時にサグ部トラカンより との相対速度に基づいて加減速度を求める、式 得られた実測値を用いて、勾配開始点より徐々に (1)で示される非線形追従モデルである。IDM+に 15km/h低 下 し 、 そ の 後 希 望 速 度 ま で 回 復 す る と おける一般車両(以下非ACC車両)とACC車両の設 いう速度プロファイルを与えている。 定パラメータを表-1に示す。なお、本稿では大型 (4) 渋滞巻き込まれ時間に伴う追従挙動の鈍化 車 ACCの 挙 動 に つ い て は 知 見 が 少 な い た め 車 種 渋滞に巻き込まれる時間が長くなると、運転に による違いは考慮していない。 対する飽きや疲れ等が原因で追従挙動が鈍化(漫 IDM+のモデル式 然 運 転 に よ る 発 進 流 率 の 低 下 )す る こ と が 既 往 の 𝑑𝑑 𝑑𝑑 𝑣 4 = 𝑎・ 𝑚𝑚𝑚 �1 − � � , 1 − � 𝑉0 𝑠 ∗ (𝑣, ∆𝑣) = 𝑆0 + 𝑣𝑣 + 𝑣∆𝑣 2√𝑎𝑎 𝑠 ∗ (𝑣,∆𝑣) 2 𝑠 � � -------------[1] 研 究により 知られ ている 2) 。 渋滞発 生後にお ける 捌け交通量の観測データから、渋滞継続時間と交 通流率の関係を算出し、渋滞時間に伴い徐々に交 通流率が低下する(車頭間隔が増加する)モデルと した。 - 31 - 土木技術資料 54-5(2012) 表-2 2.2 ACC車両挙動の表現 ACC 車 混 入 率 想定シナリオ ACC 設 定 市販当初 車間時間設定: 短 ( =1.35 秒 ) 応 遅れ が改善 される )、 (3)勾 配変 化によ らず 速度 3% 5% 10% 30% 50% 70% 一 定 、 (4)渋 滞 巻 き 込 ま れ 時 間 に よ ら ず 車 間 時 間 100% 参考ケース に お け る 速 度 一 定 制 御 、 (2)追 従 走 行 時 に お け る 車 間 時 間 一 定 制 御 (非 ACC車 両 と 比 較 し 加 減 速 反 一 定 、 と い う ACC車 両 に 特 有 の 挙 動 を 再 現 す る 100km/hで 同 約 50m)、 2.5秒 (長 :車 速 100km/hで 現況シミュレーション交通量 21.52kpトラカン速度 同 約 70m)と 設 定 し た 。 車 間 時 間 の 設 定 が 「 中 」 図-4 8:40 8:30 8:20 8:10 8:00 速度 [km/hr] 0 7:50 10 0 7:40 20 50 7:30 30 100 7:20 40 150 7:10 50 200 7:00 60 250 6:50 70 300 6:40 80 350 6:30 90 400 6:00 100km/h で 車 間 距 離 約 40m) 、 1.85 秒 ( 中 : 車 速 100 450 6:20 メ ーカの 取扱 説明書 等を参 考に、 1.35秒 (短 :車速 500 6:10 であり、本稿ではそれぞれの車間時間を自動車 交通量 [台/5分] (1) 設定車間時間に応じたS-V式の設定 「 短 」「 中 」「 長 」 の 3段 階 の 車 間 時 間 設 定 が 可 能 目標速度分布: 非 ACC 車 の 希 望 速 度分布と同一 普及促進策導入後 渋滞発生時刻 ようにモデリングを行った。 現 在 市 販 さ れ て い る ACC車 両 は 、 一 般 的 に 自然普及 8:50 ACC車 両 の 車 両 制 御 技 術 で は 、 (1)自 由 走 行 時 渋滞緩和効果試算の検討ケース 21.52KPトラカン交通量(サグより上流側) 現況シミュレーション旅行速度 交通量と速度による現況再現性の確認 以上の場合、渋滞発生前に観測される交通流率よ ACC車両混入率 10% りも低くなることが明らかなため、本研究では ACC車 両 は 全 て 車 間 時 間 「 短 」 を 選 択 す る こ と □ 第1走行車線 渋滞長でみたときの 渋滞発生時刻 △ 第2走行車線 × 追越車線 を前提とし、渋滞緩和効果を試算することとした。 なお、ACC車両の希望速度は100km/hとした。 (2) ACC車両の制御技術による反応遅れの改善 追 従 走 行 時 に お け る ACC車 両 は 、 非 ACC車 両 渋滞発生時刻 よりも先行車両への速度変化に俊敏な反応が可能 で あ る た め 、 非 ACC車 両 に 比 べ 、 追 従 走 行 時 の ACC車両混入率 70% 反応遅れは小さく、減速波の伝播が抑制されると □ 第1走行車線 渋滞長でみたときの △ 第2走行車線 渋滞発生時刻 × 追越車線 考えられる。 IDM+で 加 減速度の大 きさを 決める最大 加速度 と 最 大 減 速 度 の パ ラ メ ー タ を 、 非 ACC車 両 よ り 基本S-V式に近い小さな 円弧を描くように試行を 行 い 決 定 し た (表 -1中 :a=3m/s 2 ,b=6m/s 2 )。 こ れ に 渋滞発生時刻 より先行車両の速度変化に対して俊敏に反応する ACC 車 両 の 挙 動 が 表 現 さ れ る 。 図 -3 の よ う に ACC車 両 は 、 非 ACC車 両 に 比 べ 車 頭 間 隔 の 増 減 図-5 渋滞発生前後における車線別走行速度 (上:混入率 10%、下:混入率70%) が小さくなるようにパラメータを設定した。 3. 渋滞削減効果の試算 (3)縦断勾配変化による速度低下の解消 3.1 検討ケースの設定 ACC車 両 は 、 上 り 勾 配 区 間 で も ほ と ん ど 速 度 以上述べてきたようにサグ部に特有の挙動と 低 下がな いため 、 2.1(3)で 示した 勾配変化 によ る ACC車 両 の 挙 動 を 再 現 で き る よ う に ミ ク ロ 交 通 無意識な速度低下は生じないものとした。 シミュレータを構築した。普及シナリオとして、 (4) 渋滞巻き込まれ時間に寄らず車間時間一定 表-2に示す市販当初、自然普及、普及促進策導入 ACC車 両 で は 車 間 時 間 を 一 定 に 制 御 し て い る 後 の 7パタ ー ンを 設定 した 。 各シ ナリ オに 応じ た た め 、 非 ACC車 両 の よ う に 、 渋 滞 に 巻 き 込 ま れ ACC車 両 の 混 入 率 が 達 成 さ れ る よ う に ACC車 両 ている時間が長くなることによる追従挙動の鈍化 をランダムに発生させ、シミュレーションによる は生じないものとした。 推計を行った。 - 32 - 土木技術資料 54-5(2012) 30 3.2 シミュレーションによる現況再現性の確認 現況再現の対象区間は、東名高速道路の横浜青 22.5 100% 20.4 97% 20 葉 ICの 下 流 15.0kpか ら サ グ 部 の 上 り 勾 配 区 間 の 終 点 で あ る 23.0kpと し た 。 現 況 再 現 性 は 渋 滞 発 1% 0% 生後から速度が安定するまでのプロセスにより確 40 5.2 5 9% 0 積交通量をトラカンデータと比較し、特に渋滞発 60 46% 10 生前後における速度、交通量、および渋滞中の累 80 79% 13.3 15 3% 5% 17% 10% 30% 100 0.8 50% 削減率(%) 渋滞損失時間(千台時) 25 120 24.7 24.4 20 0 0 70% 100% ACC車両 の混入率 図-6 認している(図-4)。 ACC車両混入率別渋滞損失時間 3.3 試算結果 における渋滞緩和効果について、ミクロ交通シ (1) 渋滞発生前車線別速度の比較 ミュレーションによる試算結果を示した。設定 図-5は渋滞発生前後における車線別の走行速度 車 間 時 間 が 全 て 「 短 」 で あ り 、 常 に ACC機 能 を を 示 し た も の で あ る 。 ACC 車 両 の 混 入 率 が 作動させて走行しているという限定的な条件下 10%(図-5 上図)と比較して、70%(図-5 下図)の場 で は あ る が 、 ACC車 両 の 混 入 に よ る 渋 滞 削 減 効 合では渋滞発生直前まで流率の高い状態が維持さ 果が確認された。ミクロ交通シミュレーション れ て お り 、 渋 滞 発 生 を ACC車 両 混 入 に よ り 遅 ら に よ り ACC車 両 の 混 入 率 が 増 加 す る に 従 い 、 渋 せる効果が確認されたといえる。 滞長、および渋滞損失時間が短くなることが示 (2) 渋滞損失時間の短縮効果 された。 図 -6は ACC車 両 の 混 入 率 別 の 渋 滞 損 失 時 間 と 現 況 (ACC混 入 率 0%)に 対 す る 削 減 率 の 試 算 結 果 を示したものである。渋滞損失時間とはある設定 区間における基準となる旅行時間と実際にかかっ た旅行時間の差(遅れ時間)の総和のことであり、 基準旅行時間よりも速く走行した場合、渋滞損失 時間はゼロとなる。ここでは渋滞損失時間の算出 に用いる基準旅行速度として、当該区間における 渋滞発生直前での速度70km/hを用いた。 ミクロ交通シミュレーションによる試算では、 例 え ば ACC車 両 の 混 入 率 30%で 渋 滞 損 失 時 間 の 削 減 率 が 約 50%と な る こ と が 示 さ れ た 。 ACC車 両の普及率増加に伴い、渋滞損失時間削減率も増 加することが示された。 参考文献 1)邢 健 、 越 正 毅 : 高 速 道 路 の サ グ に お け る 渋 滞 現 象 と 車 両 追 従 挙 動 の 研 究 、 土 木 学 会 論 文 集 、 No.506、 IV-26、pp.44~55、1995. 2) 越 正 毅 、 桑 原 雅 夫 ほ か :高速 道 路 の ト ン ネ ル ・ サ グ に お け る 渋 滞 現 象 に 関する 研 究 、 土 木 学 会 論 文 集、No.458、IV-18、pp.65~71、1993. 3) G.F.Newell: A simplified car-following theory; a lower order model, Transportation Research Part B, 36, pp.195-205,2002. 4) 花 房 比 佐 友 、 堀 口 良 太 ほ か : 高 速 道 路 サ グ 部 に お け る AHS円 滑 化 サ ー ビ ス 評 価 用 交 通 シ ミ ュ レ ー タ の開発、第4回ITSシンポジウム、2005. 5) Wouter J.Schakel, Bart van Arem et al:Effects of Cooperative Adaptive Cruise Control on Traffic Flow Stability, Proceedings of 13 th International IEEE Annual Conference on Intelligent Transport Systems, 2010 4. まとめ 本 稿 で は 、 ACC車 両 の 混 入 率 に 応 じ た サ グ 部 岩﨑 健* 国土交通省国土総合政策 総合研究所高度道路交通 システム研究室 交流研 究員 Ken IWASAKI 坂井康一 *** 鈴木一史** 国土交通省国土総合政策 総合研究所高度道路交通 システム研究室 研究 官、博士(工学) Dr.Kazufumi SUZUKI 国土交通省国土総合政策 総合研究所高度道路交通 システム研究室 主任研 究官 Koichi SAKAI - 33 - 金澤文彦 **** 国土交通省国土総合政策 総合研究所高度道路交通 システム研究室長 Fumihiko KANAZAWA
© Copyright 2026 Paperzz