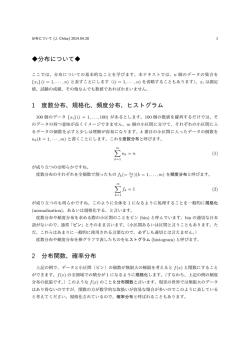
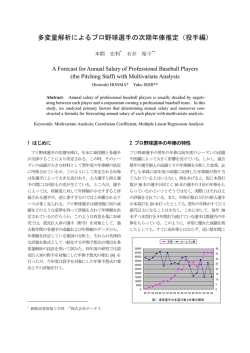
1 物理計測 2 物理計測 §1.計測の 計測の意義 計測の 意義 測定値から求められる最も確からしい値を最確値 最確値という.測定回数 n 回,測定値 最確値 計測とは,何らかの情報を抽出し,客観的かつ定量的に表示することである †1 . x 1,x 2 ,x3 ,…という測定を行ったとき,最確値 xa は以下のように定義される. そのために測定(measurement)が行われる.計測(instrumentation)はそのための xa = 方法論である. 1 n n ∑x (4.1) i i =1 計測において,ノイズ・誤差は必ず存在する.ゆえに,理論とは異なることを前 提としなければならない.また,先に結果を予測しない計測は科学的に無意味であ (4.1)式は直接測定を行った場合にのみ成り立ち,相加平均と同じである. り,結果を予測し,結果を評価して“計測”と言えるのである. ここで蛇足的に相加平均と相乗平均の関係を考える.相乗平均とは,全測定値の 積のルートをとったものである.測定値全てが正の実数であるとすると,以下の関 係が成り立つ. x1 + x 2 + x 3 + L + x n ≥ n §2.測定法 測定法 測定において,その方法は大きく分けて 2 つある. ・直接測定 直接測定:測定量を,計測器を用いて直接測定する方法.ex.ブリッジ回路 直接測定 ・間接測定 間接測定:測定量と一定の既知の関係にある量を測定して算出する方法.ex.熱電 間接測定 n x1 x 2 x 3 L x n (4.2) 等号が成り立つのは,全ての測定値が等しい値を持つときである. ある測定値 x i,その最確値 x a ,測定値の真値を x t とすると,以下の量を定義でき る. 対 間接測定では,直接測定量の誤差が目的量の結果へ影響を及ぼすため,注意が必要 誤差: 誤差 ε = x t − xi である. 誤差率: 誤差率 ε ' = x t − xi × 100% xt 残差: 残差 v = x a − x i (4.3) (4.4) (4.5) §3.誤差の種類と対策 誤差の種類と対策 通常,測定において真値はわからないため,誤差と誤差率は求められない.ゆえに, 誤差の種類は,大きく分けて 2 つある. 測定においては残差しか求めることしかできないのである †2 . ・系統誤差 系統誤差:計器の狂い,近似から生じる誤差 etc… 系統誤差 ・偶然誤差 偶然誤差:原因を特定できず,再現性もない. 偶然誤差 →較正不足が原因 →どんなに注意しても含まれる 誤差を減らす工夫としては,適切な校正(calibration)や,同一条件での繰り返しの §5.誤差 誤差の伝搬 誤差 の伝搬 測定量 x1 , x 2 に含まれる誤差を ∆x1 , ∆x 2 とし,目的量 y に含まれる誤差を ∆y とす 測定(その後統計的に処理)などが挙げられる. る.測定量の和・差・積・商の計算によって,誤差の伝搬の割合が異なってくるの で注意が必要である. §4.誤差 誤差 1.和・差 そもそも,測定量の真値(true value)が最初からわかっているならば,測定をす y + ∆y = (x1 + ∆x1 ) ± (x 2 + ∆x 2 ) = (x1 ± x 2 ) + (∆x1 ± ∆x 2 ) ∴ ∆y = ∆x1 ± ∆x 2 る必要はない.なぜならば,測定とは未知である真値を求めるために行うからであ る.しかし,広い意味で真値とは理論値や予測値のことを指すことが多い. †1 †2 「けっこう」や「だいたい」といった曖昧な表現は避けるべきである. レポートなどで誤差という言葉を使っても,それは黙認されることが多い. (5.1) 3 物理計測 2.積 4 物理計測 ある測定における真値を x t とすると,測定値 x は図 6.1 に示すようなガウス分布 ∆x ∆x ∆y = (x1 + ∆x1 )(x 2 + ∆x 2 ) = x1 1 + 1 x 2 1 + 2 y + ∆y = y1 + x2 x1 y ∆x ∆x ∆x ∆x 2 = x1 x 2 1 + 1 + 2 + 1 x x x1 x 2 1 2 ∆y ∆x1 ∆x 2 ∴ = + y x1 x2 ∆x ∆x ≅ x1 x 2 1 + 1 + 2 x x2 1 に従う.横軸は測定値で,縦軸はその測定値をとる確率である.つまり,真値付近 の値が得られる確率は高く,真値から離れた値が得られる確率は低くなるというこ とである. (5.2) xt をとる確率の 60%の位置を,xt からの ± のずれとして,σ を用いて表す.σ を母 集団標準偏差(population standard deviation)という.σ は値の“ばらつき”を表し, xt ± 3 σ の範囲に測定値の約 99.7%が含まれる. ある値 x をとる確率 P(x)は以下の式で与えられる. 3.商 x ∆x ∆x ∆y (x1 + ∆x1 ) x1 ∆x1 ∆x 2 = 1 1 + 1 1 − 2 1 + 1 + = y + ∆y = y1 + = ( ) y x x x x x x x1 x2 ∆ + 2 2 2 2 1 2 x ∆x ∆x ∆x ∆x 2 x1 ∆x1 ∆x 2 1 + ≅ = 1 1 + 1 + 2 − 1 − x2 x1 x2 x1 x 2 x 2 x1 x 2 ∆y ∆x1 ∆x 2 ∴ = − y x1 x2 −1 P (x ) = (x − x )2 exp − t 2 2σ 2πε 1 (6.1) x の値が真値 xt から離れるほど,exp の肩の値が負の方向に大きくなり,P(x)の値は 小さくなる.つまり,真値から大きく離れた値ほど,それを取る確率が小さくなる ことを意味する. (5.3) 母集団標準偏差 σ は以下のようになる. σ= §6.誤差 誤差の分布 誤差 の分布 偶然誤差(random error)において,大きな誤差は小さな誤差より起きる確率が小 さく,+と-の誤差は同程度であるという性質を持つ. 1 n n ∑ (x − x) 2 t i =1 (6.2) (6.2)式は,電気回路における実効値 rms(root mean square)と同じ形をしているこ とがわかる. 統計誤差は無く,偶然誤差のみを含むような測定条件要素を母集団(population) という.母集団はガウス分布 ガウス分布(Gaussian distribution)という確率分布に従う †3. ガウス分布 以上の式において,通常真値 xt は未知であるため,代わりに最確値 x a を用いて計算 することになる. P(x) §7.最確値と確率誤差 最確値と確率誤差 ガウス分布からわかるように,真値から非常にかけ離れた値でも,取り得る確率 60% は 0 ではない,つまり分布が±∞まで続いているのである.x に関して-∞から+∞まで 積分すると,当然ながら値は 1(=100%)となる.ここで,面積が全面積の 1/2 にな xt - σ 図 6.1 xt xt + σ x ガウス分布 る場合,つまり全測定データの 1/2 が含まれるような x=xt +ε を考える.そこで,以 下の方程式を解く. ∫ xt + ε xt −ε †3 ガウス分布を正規分布(normal distribution)と呼ぶこともある. dx f (x ) = 1 ∞ dx f (x ) 2 −∞ ∫ (7.1) 5 物理計測 6 物理計測 ∑x y − n ∑x ∑y b= 1 ∑ x − n (∑ x ) 1 すると,以下のような結果が得られる. i 1 ε = 0.6745σ = 0.6745 n n ∑ (x t − x) 2 (7.2) i =1 i 2 i i 2 i (8.4) i ε を確率誤差 確率誤差(probable error)という.(7.3)式を最確値 x a を用いて表すと,統計的 確率誤差 この場合は直線近似であるが,場合によっては曲線近似の場合もある.曲線近似に に以下の式のように表される. ついてはここでは触れないことにする. 1 n(n − 1) ε = 0.6745σ = 0.6745 n ∑ (x a − x) i =1 2 (7.3) 計測においては,計測値の最確値 xa と確率誤差 ε を以下のように表すことが多い. x = xa ± ε (7.4) §8.最小 2 乗法 測定点がある関数に従っていると仮定して,任意の 関数に合てはめる方法をフ ィッティング( fitting) と y いう.その中で最も代表的な方法が最小 最小 2 乗法(least 乗法 square method)である. 左のようないくつかの測定点を得たとき,最小 2 乗 x 法により測定点を 1 次関数 y=a+bx で近似する場合を 考える.直線 y=a+bx と i 番目の測定データ(x i,y i)との 図 8.1 測定結果 残差 v i は以下のようになる. v i = (a + bx i) - y i (8.1) 残差 v i の 2 乗総和 S(残差 2 乗和)は以下のようになる. n S= ∑ (y − a − bx i ) 2 i i =1 (8.2) ここで,残差 2 乗和 S を最小にするような a,b の組み合わせを求める.この a,b の がフィッティング直線の係数となる.そのためには,S の極小値をとる a,b を求め ればよいから,S の a,b 偏微分を求めて,それが 0 となる a,b を求める.結果的に, a,b は以下のようになる. a= 1 n (∑ y + b∑ y ) i i (8.3)
© Copyright 2026 Paperzz