8. DEĞİŞEN VARYANS SORUNU (HETEROSCEDASTICITY)
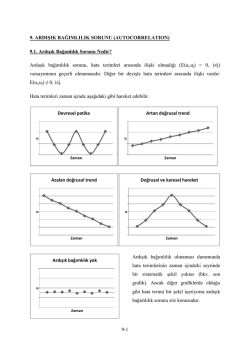
8.1. Değişen Varyans Sorunu Nedir?
Matrislerle
Y = Xβ + u
yani
Yi = β1 + β2 Xi2 + β3 Xi3 + … + βk Xik + ui, i = 1 … n
genel doğrusal modelini ele alalım.
Hata terimi için yapılan varsayımlardan birisi E(uu') = σu2I = σ2I (hata terimlerinin varyansı
sabittir ve aralarındaki kovaryans sıfırdır) varsayımıdır:
σ 2
0
′)
E(𝐮𝐮𝐮𝐮 =
0
0
σ2
0
0
0
σ 2
Değişen varyans sorunu ise hata terimlerinin varyansları birbirinden farklı olduğu durumda
vardır:
Var(ui) = E(ui2) ≠ σ2
Sorunun varlığı durumunda hata terimi varyans-kovaryans matrisi Var, Cov(u) = E(uu') =
σ2In şeklinde yazılamıyor fakat
σ 12
0
Var, Cov(u) = E(uu') = Ω =
0
0
σ 22
0
0
0
σ 2n
olarak yazılabiliyor ise değişen varyans sorunu var demektir.
Her bir hata terimi için
E(ui2) = σi2
i = 1, 2, …, n
dir ve her bir hata terimi varyansı farklıdır.
8-1
Değişen varyans sorunu genellikle yatay kesit verileriyle tahmin yapıldığında ortaya çıkar.
Hata terimlerinin varyanslarının değişken olmasının bazı nedenleri aşağıdaki gibidir.
i) Hataların öğrenildiği durumlar: insanlar öğrendikleri için hataları zaman içinde azalır.
Ör. Klavye kullanımı arttıkça yazım hataları sayısı azalır.
ii) Gelir arttıkça insanların gelirini harcamak için daha fazla seçim alanı olur. Örneğin
bağımlı değişken gıda harcamaları olsun ve açıklayıcı değişkenler bir sabit ve
harcanabilir gelir olsun. Gıda için Engel eğrisinin pozitif eğimli olması beklenir. Yani
ortalamada daha yüksek gelirlilerin gıda harcamalarının daha yüksek olması beklenir.
Aynı zamanda yüksek gelirli haneler arasında harcama farklılıklarının düşük gelirliler
arasında olduğundan daha yüksek olması beklenir. Dolayısıyla hata teriminin (ui)
varyansı gelirle birlikte artar.
Gerçekleşen tüketim değerleriyle tahmin
C
edilen (çizgi üzerindeki) tüketim değerleri
arasındaki
fark,
hata
terimi
tahminini
vermektedir ve gelir arttıkça bunlar da
büyümektedir. Bu durumda hata teriminin
varyansı da giderek artmaktadır.
Y
Benzer biçimde firmaların karları veya firma büyüklüğü (çalışan sayısı) arttıkça kar
payı da ğıtımı gibi kararlarında daha fazla değişkenlik gösterirler.
iii) Veri toplama teknikleri geliştikçe hata varyansları azalır. Ör. Daha gelişmiş veri
işleme teknikleri olan bankaların müşterileri ile ilgili verdikleri bilgiler daha az hata
içerir.
iv) Aşırı uçlar (outliers): örneklemdeki diğer gözlemlere göre çok farklı olan gözlemler
değişen varyansa neden olabilir.
v) Spesifikasyon hataları olması durumunda, özellikle dışlanan değişken varsa değişen
varyans sorunu ortaya çıkabilir.
8-2
vi) ARCH : Otoregresif koşullu değişen varyans
(Autoregressive Conditional Heteroscedasticity)
Değişen varyans sorunu zaman serileriyle yapılan tahminlerde de ortaya çıkabilir.
Özellikle enflasyon, hisse senedi fiyatları, döviz kurları gibi volatilitenin zaman içinde
değiştiği verilerde gözlenmektedir. Hata terimi varyansları hem geçmiş dönemlerin
hata terimleri ile ilişkilidir hem de dalgalanmalar gösterir.
Hata terimlerinin t dönemindeki koşullu varyansı:
E(ut2│ut-12, ut-22, … , ut-p2) = σt2 = α0 + α1ut-12 + α2ut-22 + … + αput-p2
(8.1)
Bu modelinin makul olması için (8.1) nin pozitif olması, bunun için de tüm
katsayıların pozitif olması gerekir. Çünkü varyans negatif değer alamaz.
(8.1) deki genel model ARCH(p) sürecini yansıtır. Bu durumda örneğin ARCH(1)
σt2 = α0 + α1ut-12 dir.
8-3
8.2. Değişen Varyans Sorunu EKK Tahmin Edicilerini Nasıl Etkiler?
1. E(u) = 0 ve E(X'u) = 0 varsayımları geçerli olmayı sürdürdükleri için sapmasızlık
özelliliğini korunur.
2. EKK tahmin edicisi etkinlik özelliliğini kaybeder. Çünkü
� ) = E{[𝛃𝛃
� -E(𝛃𝛃
� )][ 𝛃𝛃
� -E(𝛃𝛃
� )]'}
Var,Cov (𝛃𝛃
= E{[(X'X)-1X'u -E((X'X)-1X'u))][(X'X)-1X'u -E((X'X)-1X'u))]'}
= E{[(X'X)-1X'u][(X'X)-1X'u]'}
= E{(X'X)-1X'uu'X(X'X)-1}
= (X'X)-1X' E(uu')X(X'X)-1
= (X'X)-1X'σ2ΩX(X'X)-1
= σ2(X'X)-1X'ΩX(X'X)-1
Bu durumda değişen varyans sorunu daha büyük varyansa neden olur ve daha küçük varyansa
sahip tahmin ediciler vardır.
� ) = σ2(X'X)-1X'IX(X'X)-1 = σ2(X'X)-1 olurdu)
(E(uu') = σ2In olsaydı Var,Cov (𝛃𝛃
3. EKK tahmin edicisinin hesaplanan varyans ve standart hataları yanlış bir ifadeye
dayanacak, dolayısıyla t ve F istatistikleri sapmalı olacak, testler güvenilir olmaktan
çıkacaktır:
Hata terimlerinin varyansının (𝜎𝜎𝑢𝑢2 ) tahmin edicisi
∑ 𝑢𝑢�𝑖𝑖2
𝑛𝑛−𝑘𝑘
aşağı doğru sapmalı olur. Dolayısıyla
Var(𝛽𝛽�𝑗𝑗 ) aşağı doğru, t istatistikleri yukarı doğru sapmalı olur.
Diğer yandan R2 ve F istatistiği de yukarı doğru sapmalıdır.
8-4
8.3. Değişen Varyans Sorununun Varlığı Saptanabilir mi?
8.3.1. Biçimsel Olmayan Yöntemler
Elimizdeki çalışmanın niteliği bir ipucu verebilir: Daha önceki çalışmalar göstermiştir ki
tüketimin gelirle açıklandığı tahminlerde değişen varyans sorunu vardır. Bu nedenle tüketim
denklemi tahmininde bu sorunun olmasını bekleriz. Kesit verileri tahminlerinde heterojen
birimler varsa bu sorun sözkonusu olacaktır: örneğin yatırımların bağımlı çıktı, faiz vs. nin
açıklayıcı değişken olduğu denklemde küçük, orta ve büyük ölçekli işletmeler aynı
örneklemde yer alıyorsa bu sorundan şüphelenmeliyiz.
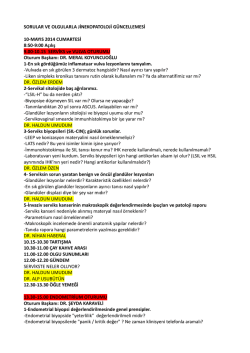
Grafik yöntemi: Değişen varyansla ilgili önceden elimizde bilgi yoksa hata tahmin karelerinin
grafiği incelenerek sistematik bir şekil verip vermediğine bakılabilir. Hata tahminleri hata
terimleri ile aynı değildir fakat özellikle örneklem büyüklüğü yeterince genişse iyi bir
tahminini verir. Dikey eksende hata tahmin kareleri, yatay eksende Y’nin tahmin değerleri
varken:
20
12
18
3
10
16
2.5
14
8
12
2
6
10
1.5
8
4
6
1
2
4
0.5
2
0
0
0
0
2
4
6
8
0
10
7
2
4
6
8
0
-2
10
2
4
6
8
10
120
6
100
5
80
4
60
3
2
40
1
20
0
-1
-2
0
2
4
6
8
10
0
0
2
4
6
8
10
ˆ ile u
ˆ i2 arasında sistematik bir ilişki görünmemektedir. Ama diğerlerinde
Birinci grafikte Y
i
vardır: örneğin 3. de doğrusal bir ilişki 4. ve 5. de karesel bir ilişki vardır.
Grafik özellikle 1. grafikte olduğu gibi bir ilişki göstermiyorsa yatay eksende açıklayıcı
değişkenlerden birinin olduğu grafik de kullanılabilir.
8-5
8.3.2. Biçimsel Yöntemler
1. Goldfeld-Quandt Test’i
Hata
terimi
varyansındaki
değişmeler
açıklayıcı
değişkenlerden
birisi
ile
ilişkilendirilebiliyorsa bu test uygulanabilir.
Yi = β1 + β2 Xi2 + β3 Xi3 + … + βk Xik + ui,
i=1…n
modelinde Var(u) diyelim ki X2 değişkeni (veya örneğin karesi) ile ilişkilidir. Test birkaç
aşamada uygulanır:
1- Önce bu X2 değişkeni küçükten büyüğe doğru sıralanmalıdır. Sonra, bağımlı değişken ve
diğer açıklayıcı değişken verileri de X2 değişkeninin sıralanmış verilerine karşılık gelecek
şekilde yeniden düzenlenmelidir.
2- Yeni sıralanmış verilerin ortasındaki c adet veri atılmalıdır ve c ≈ n/6 olmalıdır. Kalan n-c
gözlem iki eşit sayıda (=(n-c)/2) olmalıdır. Ör. n = 40 ise n/6 ≈ 6 dersek 40-6=34 ikiye
bölünebilir: n1 = n2 = 17.
3- Yukarıda verilen denklem n1 ve n2 veri ile iki kez tahmin edilmelidir.
ˆ i2
n1 adet veri ile yapılan tahminde KKT1 = Σ1u
ˆ i2
n2 adet veri ile yapılan tahminde KKT2 = Σ2u
bulunmalıdır. Burada KKT1 düşük varyanslı grup, KKT2 yüksek varyanslı gruptur.
4- Burada test edilecek hipotez aşağıdaki gibidir:
H0: σ12 = σ22
H1: σ12 ≠ σ22
Kullanılacak istatistik Fh =
RSS 2 /(n 2 − k)
RSS1 /(n 1 − k)
Eğer ui normal dağılmışsa ve sabit varyans varsayımı geçerli ise Fh Ftab = F(n2-k, n1-k) tablo
değeri ile karşılaştırılmalıdır. Fh > Ftab ise H0 reddedilir, varyansın sabit olmadığına karar
verilir.
Bu testin gücü c değerine bağlıdır: c büyük olursa yardımcı denklemlerin serbestlik derecesi
azalır; küçük olursa gözlemler arasındaki farklılığı belirlemek zordur. Goldfeld-Quandt
testinin olumsuz yönü, hata terimi varyansının bir açıklayıcı değişkenle ilişkilendirilmesidir.
Özellikle çok açıklayıcı değişken olması durumunda bu ilişkilendirme kolay olmayabilir.
8-6
2. White Test’i
White testi bir LM testidir ve diğer LM testlerinde olduğu gibi asıl denkleme ek olarak bir
yardımcı denklem tahmini gerektirir. Testin arkasındaki temel düşünce şudur: Eğer sabit
varyans varsa E(ui2) = σ dır ve X’ler veya X’lerin fonksiyonu olan değişkenler ui2 yi
açıklamaz. Bu nedenle sol taraf değişkeninin ui2, sağ taraf değişkenlerinin X’lerin bir
fonksiyonu olduğu bir yardımcı denklem tahmin edilir. Değişen varyans sorunundan
şüpheleniliyor ama formu hakkında bir fikrimiz yoksa White testi uygun bir testtir.
Asıl denklem aşağıdaki gibi olsun
Yi = β1 + β2 Xi2 + β3 Xi3 + … + βk Xik + ui,
i=1…n
ˆ i2
1- Asıl denklem tahmin edilerek hata tahmin kareleri bulunur: u
2- Aşağıdaki yardımcı denklem tahmin edilir:
ˆ i2= α1 + α2Xi2 + … + αkXik + αk+1X2i2 + … + α2kX2ik + α2k+1Xi2Xi3 + … + vi
u
Yani asıl denklemin hata tahmin karelerinin bağımlı, açıklayıcı değişkenlerin kendileri,
kareleri ve çarpımlarının açıklayıcı değişken olduğu denklem tahmin edilir. Açıklayıcı
değişkenlerin daha yüksek dereceleri de kullanılabilir.
Asıl denklemde sabit terim olsa da olmasa da yardımcı denklemde vardır.
Bu yardımcı denklem için R2 hesaplanır. Buna RY2 diyelim.
3- Boş hipotez değişen varyans olmadığı şeklindedir:
H0: α22 = α32 = … = α2k+12 = 0
H1: α22, α32, … , α2k+1 ≠ 0
RY2 nin n ile çarpımı asimptotik olarak ki-kare dağılımına sahiptir ve serbestlik derecesi
yardımcı denklemde yer alan sabit dışındaki açıklayıcı değişken sayısıdır.
nRY2 ∼ χ2(k+f-1)
(burada f asıl denklemde bulunmayıp yardımcı denklemde bulunan değişken sayısıdır)
4- Eğer hesaplanan χ2 değeri tablo değerinden büyükse H0 reddedilir. Yani değişen varyans
sorunu var demektir. Eğer büyük değilse değişen varyans sorunu yoktur.
8-7
Test edilen hipotez bakımından düşünülürse White testi Goldfeld-Quandt testinden daha
geneldir.
Olumsuz tarafı: çok sayıda açıklayıcı değişken olduğunda yardımcı denklemde serbestlik
derecesi hızla düşer. Test istatistiğinin anlamlı bulunduğu durumlarda bunun nedeni değişen
varyans olmak zorunda değildir, tanımlama hataları da olabilir veya ikisi birden olabilir.
Hangisinin olduğunu bilmek ise zordur.
3. ARCH-LM Test’i
Engle ARCH sorununun varlığını test etmek için bir LM testi önermiştir. Diğer LM
testlerinde olduğu gibi ARCH için yapılan LM testinde de asıl denkleme ek olarak bir
yardımcı denklem tahmin edilir.
Asıl denklem ve yardımcı denklem sırasıyla şöyledir:
Yt = β1 + β2 Xt2 + β3 Xt3 + … + βk Xtk + ut,
t=1…n
ˆ 2t= a + c1uˆ 2t -1 + c2uˆ 2t -2 + … + cpuˆ 2t -p+ et
u
Yardımcı denklemdeki gecikme sayısı p araştırmacıya kalmıştır ancak üç aylık veriler
kullanılıyorsa gecikme sayısı 4 e çıkabilir.
White testinde olduğu gibi test istatistiği olarak χ2 dağılımlı değişkenler kullanılabilir:
χ2(p) ∼ nRY2
H0: c1, c2 , … , cp = 0
H1: c1, c2 , … , cp ≠ 0
Hesaplanan değer tablo değerinden büyükse H0 reddedilir ve modelde ARCH vardır sonucuna
ulaşılır.
8-8
8.4. Değişen Varyans Sorununun Çözümü Var mıdır?
Değişen varyans sorununu nasıl çözeceğimiz, değişen varyansın formunu belirleyip
belirleyemediğimize bağlıdır. Değişen varyans sorununun nasıl çözüleceğine geçmeden önce
daha önce belirttiğimiz bir şeyi tekrarlayalım: değişen varyans model spesifikasyonunun
yanlış olmasından kaynaklanabilir. Verinin logaritmasının alınması değişen varyans
sorununun azalmasını veya ortadan kalkmasını sağlayabilir. Bu nedenle ele alacağımız
metodları uygulamadan önce spesifikasyonun doğru olduğundan emin olmak gerekir.
Değişen varyansın formu tam olarak biliniyorsa GEKK yöntemi kullanılır. Değişen varyansın
formunu bilmiyorsak veya tahmin edemiyorsak White standart hatalar kullanılır.
8.4.1. σui2 değerleri biliniyorsa: Genelleştirilmiş EKK (GEKK) Yöntemi
(Generalized Least Squares - GLS)
Değişen varyans sorununda hata terimi varyans-kovaryans matrisinin
Var, Cov(u) = E(uu') = σ2In yerine
σ 12
0
Var, Cov(u) = E(uu') = Ω =
0
0
σ 22
0
0
0
σ 2n
geçmektedir.
GEKK yöntemi asıl denklemden bir dönüştürülmüş denklem elde edip bu dönüştürülmüş
denklemi EKK ile tahmin etmek anlamına gelmektedir. Bu durumda dönüştürülmüş denklem
aşağıdaki gibidir.
X 2,i
X k,i
Yi
1
= β1 + β 2
+ ... + β k
+ ei
σi
σi
σi
σi
Dönüştürülmüş denklemin hata terimi ei = ui/σi dir ve e’nin varyansı :
Var(ei) = E(ei)2 = E(ui/σi)2 = (1/σi2)E(ui)2 = (1/σi2)σi2 = 1 dir ve sabittir.
8-9
Dönüştürülmüş denklemin EKK ile tahmin edilmesi, asıl denklemin GEKK ile tahmin
edilmesi anlamına gelmektedir. Buradaki dönüştürülmüş denklemin EKK uygulanması
Ağırlıklı EKK (weighted least squares) olarak adlandırılır. Çünkü her bir gözlem hata terimi
varyansının tersi ile ağırlıklandırılmıştır. Ağırlıklı EKK, daha genel bir yöntem olan GEKK’in
özel bir durumudur. Daha sonraki bölümlerde GEKK’in farklı özel durumlarını da ele
alacağız.
Ağırlıklı EKK’da ağırlıkların kullanılması şu anlama gelir: yüksek varyansa sahip gözlemler
tahminde daha düşük ağırlığa sahiptir. Daha genel olarak şu söylenebilir: en yüksek kalitedeki
gözlemlere en yüksek ağırlık verilir, en düşük kalitedeki gözlemlere en düşük ağırlık verilir.
Bazı durumlarda
ω1 0
0 ω
2
2
2
Var, Cov(u) = E(uu') = σ Ω = σ
0 0
0
0 σ 2 ω1
2
σ ω2
0 0
=
0
ω n 0
0
0
σ 2 ω n
Olduğu varsayılır. Yani her bir hata terimi için E(ui2) = σ2ωi dir. Yani her bir varyansın σ2 gibi
sabit bir kısmı vardır fakat ωi nedeniyle her bir varyans birbirinden farklıdır:
Var(u1) = σ2ω1, Var(u2) = σ2ω2, … Var(un) = σ2ωn
Bu durumda dönüştürülmüş denklemi şöyle ifade edebiliriz:
Yi
σ ωi
= β1
1
σ ωi
+ β2
X 2,i
σ ωi
+ ... + β k
X k,i
σ ωi
+
ui
σ ωi
veya
Yi
ωi
= β1
1
ωi
+ β2
X 2,i
ωi
+ ... + β k
X k,i
ωi
+ ei
dönüştürülmüş denklemin hata terimi ei = ui/√ωi
e’nin varyansı : Var(ei) = E(ei)2 = E(ui/√ωi)2 = (1/ωi)E(ui)2 = σ2ωi/ωi = σ2 dir ve sabittir.
8-10
8.4.2. σui2 değerleri bilinmiyorsa:
GEKK yönteminin bu şekilde uygulanabilmesi için Ω değerlerinin bilinmesi gerekir. Bu
değerlerin bilinmemesi durumunda üç yöntem uygulanabilir.
i- Değişen varyans ile ilgili varsayım
Ω genellikle bilinmediği için hata terimi varyansının açıklayıcı değişkenlerden birisi ile ilişkili
olarak değiştiği varsayımı yapılır: Örneğin
a- Hata terimleri varyansı X22 ile orantılıdır: Var(ui) = σ2X2i2
(ωi = X2i2)
Bu durumda Ω matrisi şu şekilde tanımlanmış olmaktadır:
X 22,1
0
Ω=
0
0
X 22,2
0
0
0
X 22,n
Sonuç olarak dönüştürülmüş model şu şekildedir:
X
Yi
1
= β1
+ β 2 + ... + β k k,i + e i
X 2,i
X 2,i
X 2,i
ei = ui /X2,i
e’nin varyansı : Var(ei) = E(ei)2 = E(ui/ X2,i)2 = (1/ X2,i 2)E(ui)2 = σ2X2i2/ X2,i 2 = σ2 dir (sabit)
b- Hata terimleri varyansı X2 ile orantılıdır: Var(ui) = σ2X2,i
(ωi = X2i2)
dönüştürülmüş model:
Yi
X 2,i
= β1
1
X 2,i
+ β 2 X 2,i + ... + β k
X k,i
X 2,i
+ ei
8-11
e i = u i / X 2,i
ii- White değişen varyansla tutarlı varyansları
(White’s heteroscedasticity-consistent variances and Standard errors)
White göstermiştir ki büyük örneklemlerde gerçek parametre değerleri ile ilgili istatistiki
çıkarımlarda
bulunulabilir.
Bu
yöntemde
katsayı
varyans
kovaryans
matrisinin
ˆ i2 kullanılır.
hesaplanmasında, σi2 yerine onun tahmini olarak u
(White cov matrisi: (X'X)-1[Σi=1nui2xixi'](X’X)-1)
Pek çok ekonometri paketi White değişen varyansla tutarlı varyansları ve standart hataları
vermektedir. Bu değerler EKK değerlerinden büyük veya küçük olabilir.
Bu yöntemin uygulanabilmesi için büyük örneklem olması gerekir.
8-12
© Copyright 2026 Paperzz