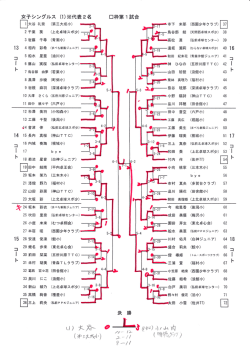
Εισαγωγή στον Αυτόματο Έλεγχο (8.3.01.5) Σημειώσεις Μαθήματος 2011-2012 Μέρος 1ο Γεώργιος Παπαλάμπρου 2 Δρ. Γεώργιος Παπαλάμπρου Λέκτορας ΕΜΠ Εργαστήριο Ναυτικής Μηχανολογίας Σχολή Ναυπηγών Μηχανολόγων Μηχανικών Εθνικό Μετσόβιο Πολυτεχνείο email: [email protected] http://www.lme.ntua.gr ενημέρωση: 22/11/2011 ΓΠ XELATEX Περιεχόμενα 1 Ορισμοί, Διατύπωση Προβλήματος, Μοντελοποίηση 1.1 Εισαγωγή, Ορισμοί . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Το Πρόβλημα του Σχεδιασμού Συστημάτων Ελέγχου . . . . . . . . . 1.3 Μοντελοποίηση Δυναμικών Συστημάτων . . . . . . . . . . . . . . . . 1.3.1 Τύποι Μοντέλων . . . . . . . . . . . . . . . . . . . . . . . . . 1.4 Παραδείγματα Μοντέλων . . . . . . . . . . . . . . . . . . . . . . . . 1.5 Επίλυση Διαφορικών Εξισώσεων στο Πεδίο του Χρόνου . . . . . . . . 1.6 Κανονικοποίηση . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.7 Γραμμικοποίηση . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.8 Εξισώσεις Χώρου Κατάστασης . . . . . . . . . . . . . . . . . . . . . 1.9 Εφαρμογές: Τρένο MagLev, Εκκρεμές . . . . . . . . . . . . . . . . . . 1.10 Επίλυση Εξισώσεων Δυναμικών Συστημάτων στο MATLAB, Simulink . . . . . . . . . . . 7 7 20 23 26 27 30 30 32 33 34 37 2 Μετασχηματισμός Laplace 2.1 O Μετασχηματισμός Laplace . . . . . . . . . . . . . . . 2.1.1 Μετασχηματισμός Laplace απλών συναρτήσεων 2.1.2 Πίνακας Μετασχηματισμών Laplace . . . . . . . 2.1.3 Κύριες Ιδιότητες Μετασχηματισμού Laplace . . . 2.2 Συναρτήσεις μεταφοράς . . . . . . . . . . . . . . . . . . 2.3 Πόλοι, Μηδενιστές . . . . . . . . . . . . . . . . . . . . . 2.4 Πολυμεταβλητά συστήματα . . . . . . . . . . . . . . . . 2.5 Παραδείγματα . . . . . . . . . . . . . . . . . . . . . . . 2.6 Θεώρημα Τελικής Τιμής . . . . . . . . . . . . . . . . . . 2.7 Δομικά διαγράμματα . . . . . . . . . . . . . . . . . . . . 2.8 Αντίστροφος Μετασχηματισμός Laplace . . . . . . . . . 2.9 Επίλυση ΔΕ . . . . . . . . . . . . . . . . . . . . . . . . . 2.10 Ασκήσεις . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 45 46 46 46 47 47 47 48 50 51 52 53 55 3 Ανάλυση Μεταβατικής Απόκρισης Συστημάτων 3.1 Ανάλυση Μεταβατικής Απόκρισης . . . . . 3.2 Σήματα Εισόδου Δοκιμής . . . . . . . . . . 3.3 Χαρακτηριστικά Δυναμικής Συμπεριφοράς . 3.4 Απόκριση Συστημάτων 1ης Τάξης . . . . . . 3.5 Απόκριση Συστημάτων 2ης Τάξης . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 63 64 64 65 67 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 ΠΕΡΙΕΧΟΜΕΝΑ 3.6 3.7 Προδιαγραφές Συστημάτων Ελέγχου . . . . . . . . . . . . . . . . . . . 3.6.1 Προδιαγραφές Μεταβατικής Απόκρισης Βαθμίδας . . . . . . . 3.6.2 Παράμετροι Προδιαγραφών Μεταβατικής Απόκρισης Βαθμίδας 3.6.3 Απόκριση Συστημάτων 2ης Τάξης . . . . . . . . . . . . . . . . Ασκήσεις . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Δυναμική Συμπεριφορά 4.1 Εισαγωγή . . . . . . . . . . . . . . . . . . . . 4.2 Διαφορικές Εξισώσεις . . . . . . . . . . . . . 4.3 Ποιοτική Ανάλυση . . . . . . . . . . . . . . . 4.3.1 Πορτραίτα Φάσεων . . . . . . . . . . 4.3.2 Σημεία Ισορροπίας, Οριακοί Κύκλοι . 4.4 Ευστάθεια . . . . . . . . . . . . . . . . . . . . 4.4.1 Ορισμοί . . . . . . . . . . . . . . . . 4.4.2 Ευστάθεια Γραμμικών Συστημάτων . . 4.5 Ευστάθεια κατά Lyapunov . . . . . . . . . . . 4.5.1 Συναρτήσεις Lyapunov . . . . . . . . 4.6 Μη γραμμικός Έλεγχος με Μέθοδο Lyapunov 4.7 Αναφορές . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 71 72 73 75 83 83 83 83 84 86 87 87 89 89 90 90 91 Πρόλογος Το τεύχος αυτό περιλαμβάνει την ύλη που διδάσκω στο μάθημα Εισαγωγή στον Αυτόματο Έλεγχο (8.3.01.5), στο 5ο εξάμηνο της ΣΝΜΜ του ΕΜΠ. Το περιεχόμενο βασίστηκε στις παραδόσεις μου από το 2008 μέχρι το 2011 στο ΕΜΠ. Δόθηκε έμφαση σε σύγχρονες πρακτικές που χρησιμοποιούν μεταβλητές κατάστασης για την παράσταση του συστήματος αλλά και τον έλεγχο (state space). Στο πεδίο του χρόνου, παρουσιάζονται μέθοδοι σχεδιασμού ελεγκτών όπως η μέθοδος τοποθέτησης πόλων (pole placement) και η μέθοδος βέλτιστου τετραγωνικού ρυθμιστή (quadratic optimal regulator). Τέλος παρουσιάζεται η μέθοδος ελέγχου με χρήση παρατηρητή. Στο πεδίο της συχνότητας παρουσιάζονται μέθοδοι σχεδιασμού ελεγκτών όπως o κλασσικός PID και με ”εσωτερικό μοντέλο” ( IMC-Internal Model Control), αλλά και τύπου lead/lag. Αναπόσπαστο κομμάτι είναι η χρήση του MATLAB/Simulink στην μελέτη συμπεριφοράς δυναμικών συστημάτων και το σχεδιασμό ελεγκτών. Έχει γίνει προσπάθεια να υπάρχει ο σχετικός κώδικας σε κάθε λυμμένο παράδειγμα, δίνοντας έτσι τη δυνατότητα στο σπουδαστή να επαληθεύσει τα αποτελέσματα. Προβλέπεται επίσης η χρήση εργαστηριακής διάταξης ανεστραμένου εκκρεμούς που διαθέτει το ΕΝΜ, για εφαρμογή των παραπάνω μεθοδολογιών στην πράξη. Το τεύχος βρίσκεται σε μορφή pdf στο διαδυκτιακό τόπο του μαθήματος, στη διεύθυνση http://www.lme.ntua.gr/les_control.html. Γιώργος Παπαλάμπρου, Ζωγράφου, 10/2011. 5 6 ΠΕΡΙΕΧΟΜΕΝΑ Κεφάλαιο 1 Ορισμοί, Διατύπωση Προβλήματος, Μοντελοποίηση 1.1 Εισαγωγή, Ορισμοί • Εισαγωγή • Ορισμοί: Συστήματα, SISO/MIMO, Γραμμικά/Μη γραμμικά • Κατηγορίες Συστημάτων • Μοντέλα • Συστήματα Ελέγχου • Ανάλυση Συστήματος • Οι 2 τύποι ελεγκτών: Είσοδος Αναφοράς, Απόρριψη Διαταραχής • Συμβιβασμός μεταξύ Επίδοσης και Ευρωστότητας • Σταθεροποίηση • Μαθηματικά Μοντέλα Συστημάτων • Κανονικοποίηση και γραμμικοποίηση • Χώρος κατάστασης Παράδειγμα 1.1.1 Ένα απλουστευμένο παράδειγμα συστήματος ελέγχου. Παρουσιάζεται από νωρίς ένα απλουστευμένο αλλά πλήρες παράδειγμα συστήματος ελέγχου κλειστού βρόχου, παρότι δεν έχουν εξηγηθεί ακόμη έννοιες όπως σύστημα, έλεγχος με ανατροφοδότηση της μέτρησης, μαθηματικό μοντέλο συστήματος. Στόχος είναι να σχηματιστεί από την αρχή μια ξεκάθαρη εικόνα για το αντικείμενο του σχεδιασμού συστημάτων ελέγχου. Επιλέχθηκε ως παράδειγμα το σύστημα ελέγχου ταχύτητας οχήματος (cruise 7 8 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ control), θεωρώντας ότι οι περισσότεροι είναι εξοικοιωμένοι πλέον με την καθημερινή τεχνολογία των οχημάτων. Σκόπιμα έχουν γίνει απλουστεύσεις και παραδοχές, που όμως εξυπηρετούν την πρώτη και γρήγορη επαφή με το ”πρόβλημα προς μελέτη” αλλά και το υπολογιστικό περιβάλλον του MATLAB/Simulink. Το σύστημα ελέγχου ταχύτητας οχήματος είναι ένα συνηθισμένο σύστημα με ανατροφοδότηση (feedback) που συναντάμε σήμερα. Στόχος αυτού του συστήματος ελέγχου είναι να διατηρεί σταθερή την ταχύτητα του οχήματος, παρουσία διαταραχών. Ο ελεγκτής αντισταθμίζει τις άγνωστες διαταραχές ρυθμίζοντας κατάλληλα την ποσότητα καυσίμου, μετρώντας συνέχεια την ταχύτητα του οχήματος, όπως φαίνεται στο Σχήμα 3.13. Δομικό διάγραμμα συστήματος ελέγχου ταχύτητας Cruise Control System Fd T hrottle T W heels F Engine Σ u − Actuator Controller Interf ace Car V on − of f set − decrease resume − increase cruise.ipe Σχήμα 1.1: Δομικό διάγραμμα συστήματος ελέγχου ταχύτητας Τα μέρη του συστήματος ελέγχου ταχύτητας Το μοντέλο του συστήματος παριστάνεται στο δομικό διάγραμμα του Σχήματος 3.13. Θεωρούμε V την ταχύτητα του οχήματος και Vref την επιθυμητή ταχύτητα (ταχύτητα αναφοράς). Ο ελεγκτής (controller) είναι τύπου Fuzzy Logic ή PI (Proportional Integral), ό οποίος δέχεται τα σήματα V , Vref και υπολογίζει το σήμα ελέγχου u, που μεταφέρεται στο επενεργητή (actuator). Ο επενεργητής ελέγχει την ποσότητα καυσίμου που παρέχεται στον κινητήρα. Λειτουργία του συστήματος ελέγχου ταχύτητας Το καύσιμο ελέγχει την ροπή (T orque, T ) που παράγεται από τον κινητήρα, η οποία με την σειρά της μεταφέρεται μέσω του κιβωτίου ταχυτήτων στους τροχούς για να γίνει τελικά η δύναμη F που κινει το όχημα. 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 9 Οι διαταραχές Fd οφείλονται στην αλλαγή της κλίσης του δρόμου, στην αντίσταση κύλισης και στην αεροδυναμική αντίσταση. Ο ελεγκτής ταχύτητας διαθέτει κατάλληλο χειριστήριο (Interface) με το οποίο ο οδηγός ρύθμίζει την επιθυμητή ταχύτητα πορείας. Υπάρχει επίσης λειτουργία που διακόπτει τον αυτοματισμό σε περίπτωση που πατηθεί φρένο. Μαθηματικό μοντέλο του συστήματος Το όχημα αποτελείται από πολλά υποσυστήματα και ένα λεπτομερές μαθηματικό μοντέλο θα ήταν αρκετά πολύπλοκο. Παρόλα αυτά το μοντέλο για τον σχεδιασμό του ελεγκτή ταχύτητας είναι αρκετά απλό. Εφαρμόζεται ισορροπία δυνάμεων, στο σχήμα, με M την συνολική μάζα (όχημα και επιβάτες), F την δύναμη που δημιουργούν οι τροχοί με τον δρόμο και Fd η διαταραχή από αεροδυναμική αντίσταση και την κλίση του δρόμου. Η εξίσωση κίνησης είναι: dV M = F − Fd (1.1) dt Η δύναμη F δημιουργείται από τον κινητήρα, μέσω της ροπής T , ανάλογη του καυσίμου και εξαρτώμενη από την ταχύτητα περιστροφής του κινητήρα. Η Fd αναλύεται ως Fd = Fg + Fa (1.2) με Fa την αεροδυναμική αντίσταση , Fa = 12 Cd AV 2 , όπου A είναι η μετωπική επίφάνεια, V η ταχύτητα του οχήματος, Cd ο συντελεστής αεροδ. αντιστασης. και Fg την δύναμη απο την κλίση του δρόμου. Εδώ Fg = 0, δηλ. επίπεδος δρομος. Περιγραφή μοντέλου στο Simulink Παρουσιάζεται το μοντέλο προσομοίωσης και ελεγκτή στο περιβάλλον Simulink Οι δυναμικές εξισωσεις του οχήματος βρίσκονται στο δομικό στοιχείο ”Vehicle”. Ο ελεγκτής, τύπου Fuzzy Logic, παριστάνεται με το δομικό στοιχείο ”Fuzzy Controller”. Η βηματική είσοδος αναφοράς, από 40 km/h σε 45 km/h παριστάνεται με το δομικό στοιχείο ”Step”. Το στοιχείο ”Vehicle” υπολογίζει την ταχύτητα του οχήματος (μεταβλητή V) και την γωνία της πεταλούδας στο σύστημα καυσίμου (μεταβλητή theta), ανάλογη με την ποσότητα καυσίμου προς τον κινητήρα. Το στοιχείο ”Scope” απεικονίζει την μεταβολή των παραμέτρων. Στο πάνω διάγραμμα φαίνεται το ζέυγος ταχύτητας αναφοράς (Vref ) και πραγματικής ταχύτητας (V ), ενώ στο κάτω διάγραμμα φαίνεται η εντολή του ελεγκτη πρός το σύστημα του καυσίμου, (u). Αποτελέσματα προσομοίωσης στο Simulink Το στοιχείο ”yout” μεταφέρει τις τιμές των μεταβλητών vd, v, theta στο ”χώρο εργασίαςWorkspace” του MATLAB, για να μπορούν να αποθηκευτούν σε αρχείο ή να τυπωθούν σχετικά διαγράμματα. Κατασκευάζει το αντίστοιχο διάνυσμα. Το στοιχείο ”clock” μεταφέρει τις τιμές του χρόνου προσομοίωσης (ως διάνυσμα) στο ”χώρο εργασίας-Workspace” του MATLAB, για να μπορούν να τυπωθούν σχετικά διαγράμματα ως προς τον χρόνο. 10 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.2: Tο μοντέλο στο Simulink Εντολές δημιουργίας διάγραμματων: subplot(211); plot(t,yout(:,1),’–’,t,yout(:,2),’-’); xlabel(’Time(sec)’); ylabel(’v,vd’); subplot(212); plot(t,yout(:,3)); xlabel(’Time(sec)’);ylabel(’theta’); Σχήμα 1.3: Αποτελέσματα προσομοίωσης στο Simulink 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 11 Σχήμα 1.4: Αποτελέσματα διαγραμμάτων στο MATLAB Ρύθμιση προσομοίωσης Σχήμα 1.5: Ρύθμιση προσομοίωσης Η διάρκεια προσομοίωσης ορίζεται στα 30 seconds. Η προσομοίωση ξεκινάει πατώντας το μαύρο τριγωνάκι ή στην γραμμή εργαλείων Simulation|Start. Ως τρόπος προσομοίωσης ορίζεται ολοκλήρωση με μεταβαλόμενο βήμα (στην γραμμή εργαλείων Simulation|Con guration parameters|Solver options: Type: variable step) Συμπεράσματα Παρατηρώντας τα αποτελέσματα των διαγραμμάτων, βλέπουμε ότι ζητούμενο είναι να αλλάξουμε την ταχύτητα του οχήματος από 40 km/h σε 45 km/h. Το όχημα τελικά αποκτά την ταχύτητα 45 km/h, παρότι παρουσιάζεται αρχικά ”υπερακόντιση” (overshoot) και ταλαντωτική κίνηση (πάνω διάγραμμα). Βλέπουμε επίσης την εντολή του συστήματος καυσίμου προς τον κινητήρα, προκειμένου να επιτευχθεί ο στόχος (theta, κάτω διάγραμμα). Κατά τον σχεδιασμό των ελεγκτών, μπορεί να βελτιωθούν τα χαρακτηριστικά της απόκρισης (εδώ να αποκτηθεί η τελική ταχύτητα πιο γρήγορα, χωρίς τάλαντωση, με την μικρότερη 12 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ δυνατή κατανάλωση καυσίμου κλπ). Ο σχεδιασμός ελεγκτών είναι επαναληπτική διαδίκασιαθυμηθείτε την μέθοδο spiral στο soware engineering. Σύστημα και σήματα • Σύστημα: Πλήθος ή συνδιασμός συνιστωσών που παράγουν λειτουργίες που δεν είναι δυνατόν να επιτευχθούν με επιμέρους συνιστώσες. • Σήμα εισόδου - u (ή διέγερση): Σύνολο των δυναμικών μεταβλητών που επιδρούν στο σύστημα. • Σήμα εξόδου - y (ή απόκριση): Σύνολο των δυναμικών μεταβλητών που δείχνουν την μεταβολή της κατάστασης υπό την επίδραση των εισόδων. • Κατάσταση (state-x): Εσωτερική μεταβλητή. Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.6 Σχήμα 1.6: Γράφική παράσταση των εξισώσεων κατάστασης • Τα συστήματα περιλαμβάνουν σήματα είσοδων και εξόδων. • Τα σήματα δημιουργούνται ή απορροφούνται από τα συστήματα. • Ένα (ή περισσότερα) σήμα εξόδου απο ένα σύστημα μπορεί να αποτελέσει σήμα εισόδου σε ένα άλλο (ή άλλα) σύστημα. Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.7 Σχήμα 1.7: Γράφική παράσταση των εξισώσεων κατάστασης 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 13 Σχήμα 1.8: Γράφική παράσταση των εξισώσεων κατάστασης Σύστημα 1 εισόδου (u τάση) και 1 εξόδου (y ρεύμα) Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.11 • Συστήματα SISO (Single Input Single-Output): 1-Εισόδου 1- Εξόδου • Συστήματα MIMO (Multi Input Multi-Output): Πολλών Εισόδων Πολλών Εξόδων • Στο πλαίσιο του μαθήματος: μόνον SISO • SISO: Ευκολότερο να αναλυθούν και να ελεγθούν • MIMO: Τα περισσότερα σύστηματα στην πράξη • MIMO: Ιδιαίτερη δυσκολία λόγω εσωτερικών αλληλεπιδράσεων Συστήματα SISO Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.12 Συστήματα MIMO Παράδειγμα συστήματος 2 εισόδων-2 εξόδων παριστάνoνται γραφικά όπως στην εικόνα 1.13 [ ] [ ][ ] Y1 (s) G11 (s) G12 (s) U1 (s) = (1.3) Y2 (s) G21 (s) G22 (s) U2 (s) Γραμμικά/Μη γραμμικά Συστήματα ]Συστήματα SISO/MIMO Σύστημα 1 εισόδου (u τάση) και 1 εξόδου (y ρεύμα) Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.11 • Συστήματα SISO (Single Input Single-Output): 1-Εισόδου 1- Εξόδου • Συστήματα MIMO (Multi Input Multi-Output): Πολλών Εισόδων Πολλών Εξόδων 14 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.9: Γράφική παράσταση των εξισώσεων κατάστασης Σχήμα 1.10: Γράφική παράσταση των εξισώσεων κατάστασης • Στο πλαίσιο του μαθήματος: μόνον SISO • SISO: Ευκολότερο να αναλυθούν και να ελεγθούν • MIMO: Τα περισσότερα σύστηματα στην πράξη • MIMO: Ιδιαίτερη δυσκολία λόγω εσωτερικών αλληλεπιδράσεων Συστήματα SISO Οι εξισώσεις κατάστασης παριστάνoνται γραφικά όπως στην εικόνα 1.12 Συστήματα MIMO Παράδειγμα συστήματος 2 εισόδων-2 εξόδων παριστάνoνται γραφικά όπως στην εικόνα 1.13 [ Y1 (s) Y2 (s) ] [ = G11 (s) G21 (s) G12 (s) G22 (s) ][ U1 (s) U2 (s) ] (1.4) 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 15 Σχήμα 1.11: Γράφική παράσταση των εξισώσεων κατάστασης Σχήμα 1.12: Γράφική παράσταση των εξισώσεων κατάστασης Γραμμικά/Μη γραμμικά Συστήματα • Η κυριότερη διάκριση μεταξύ συστημάτων είναι Γραμμικά/Μη γραμμικά συστήματα. • Γραμμικά: πρέπει να ισχύει η αρχή επαλληλίας: H(au1 + bu2 ) = aHu1 + bHu2 , με a, b βαθμωτά μεγέθη. • Σε διαφορετική περίπτωση: το σύστημα είναι Μη Γραμμικό. • Στο πλαίσιο του μαθήματος: μόνον Γραμμικά συστήματα, για τα οποία υπάρχει εκτενής θεωρία αυτομάτου ελέγχου. • Τα συστήματα ελέγχου για Μη Γραμμικά συστήματα, σχεδιάζονται κατά περίπτωση. 16 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.13: Γράφική παράσταση των εξισώσεων κατάστασης Κατηγορίες Συστημάτων • Σύστημα χρονικά αμετάβλητο: όταν οι σχέσεις εισόδου-εξόδου δεν μεταβάλλονται με τον χρόνο. • Ένα σύστημα με σχέση εισόδου-εξόδου y(.) = H u(.) είναι χρονικά αμετάβλητο όταν H u(t − T ) = y(t − T ). • Σύστημα στατικό: οι τιμές εξόδου εξαρτώνται από τις τιμές εισόδου στην ίδια στιγμή και όχι από προηγούμενες ή μελλοντικές τιμές εισόδου. • Σύστημα δυναμικό: οι τιμές εξόδου εξαρτώνται όχι μόνον από τις τιμές εισόδου στην ίδια στιγμή, αλλά από μερικές τουλάχιστον προηγούμενες τιμές εισόδου. Μοντέλα: Αφηρημένη ενότητα ιδιοτήτων ικανή να περιγράψει την συμπεριφορά για ορισμένες συνθήκες λειτουργίες. Παράδειγμα: Απλό μηχανικό σύστημα, ΔΕ: m¨ x + bx˙ + kx = fa παριστάνoνται γραφικά όπως στην εικόνα 1.31. Μάζα m, ελατήριο σταθεράς k, αποσβεστήρας με απόσβεση b, εφαρμοζόμενη δύναμη fa, μετρούμενη μετατόπιση x. Σχήμα 1.14: Γράφική παράσταση των εξισώσεων κατάστασης 2 κατηγορίες μοντέλων: (α) βασίζονται σε αρχές μηχανικής, θερμοδυναμικής, κλπ (β) προκύπτουν μετα από (πολλά) πειράματα και δημιουργούνται με συσχετισμό (πχ 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 17 ελάχιστα τεράγωνα) εισόδων-αποκρίσεων. Μας ενδιαφέρουν μοντέλα κατάλληλα για συστήματα ελέγχου: απλά, που περιγράφουν τη δυναμική του φαινομένου, συσχετίζοντας την έξοδο με την είσοδο. Συστήματα Ελέγχου Σκοπός του Συστήματος Ελέγχου Κλειστού Βρόχου: να ελέγχει την μεταβλητή εξόδου (y) σύμφωνα με προκαθορισμένο τρόπο (u), με χρήση σήματος σφάλματος (e), συγκρίνοντας με το σήμα αναφοράς (r). Σύστημα ελέγχου κλειστού βρόχου: ανατροφοδοτείται η μέτρηση εξόδου y στο ακόλουθο Δομικό Διάγραμμα. Παριστάνoνται γραφικά όπως στην εικόνα 1.15. Σχήμα 1.15: Σύστημα ελέγχου κλειστού βρόχου Παράδειγμα 1.1.2 Δομικό Διάγραμμα Συστήματος Ελέγχου Θερμοκρασίας Χώρου. Η εγκατάσταση παριστάνεται με το Δομικό Διάγραμμα: Φαίνονται τα κύρια μέρη ως δομικά στοιχεία, χωρίς λεπτομέρειες και μαθηματικά. Φαίνονται οι κύριες κατευθύνσεις σημάτων και ενέργειας, από το ένα στοιχείο στο άλλο. Στους κόμβους (κύκλοι με σήμα Σ) γίνεται αλγεβρική άθροιση. Γραφικά όπως στην εικόνα 1.16. HeatLoss Qloss Actuator − Burner Controller Boiler Σ − Σ Room y = room temperature T emperature sensor Desired temperature room.ipe Σχήμα 1.16: Σύστημα ελέγχου κλειστού βρόχου Θεωρούμε στην αρχή τις θερμοκρασίες χώρου (room) και εξωτερική χαμηλώτερες από την επιθυμητή θερμοκρασίες χώρου (desired). Το σύστημα ελέγχου θα δώσει εντολή λειτουργίας (καύση) προς τον καυστήρα (burner), ο οποίος με την σειρά του θα θερμάνει 18 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ το νερό που θα μεταφέρει την θερμότητα στον χώρο. Η θερμότητα του νερού θα είναι μεγαλύτερη από τις απώλειες, Q_loss, και έτσι η θερμοκρασία χώρου θα αυξηθεί και θα ξεπεράσει την επιθυμητή τιμή. Τότε το σύστημα ελέγχου θα δώσει εντολή παύσης προς τον καυστήρα. Η θερμοκρασία χώρου θα αρχίσει να πέφτει λόγω των απωλειών, μέχρι να ξεπεράσει την επιθυμητή τιμή. Μόλις γίνει αυτό, ο κύκλος παροχής θερμότητας ξαναρχίζει. Βασική έννοια είναι το σύστημα (εδώ ο χώρος), όπου θέλουμε να ελέγξουμε μια μεταβλητή (θερμοκρασία). Ως έξοδο θεωρούμε την θερμοκρασία χώρου και ως διαταραχή την θερμότητα από τις απώλειες προς την χαμηλώτερη εξωτερική θερμοκρασία. Επενεργητής είναι οι διατάξεις που μπορούν να επιδρούν στο σύστημα (καυστήρας και λέβητας). Ένα θερμόμετρο μετρά την θερμοκρασία χώρου και στέλνει το σήμα του στον ελεγκτή Τέλος υπάρχει η επιθυμητή θερμοκρασία, που οι χρήστης ρυθμίζει και επίσης στέλνεται στον ελεγκτή. Παράδειγμα 1.1.3 Δομικό Διάγραμμα Συστήματος Ελέγχου Ταχύτητας Οχήματος. Στόχος του συστήματος ελέγχου: η διατήρηση ταχύτητας ενός οχήματος, αναξάρτητα από την κλίση του δρόμου (road grade). Το σύστημα ελέγχου ρυθμίζει την ποσότητα καυσίμου προς τον κινητήρα, μετρώντας την παραγματική ταχύτητα του οχήματος. γραφικά όπως στην εικόνα 1.17. Road grade Car Σ Engine Controller Σ − Desired speed Actual speed Speed sensor cruise2.ipe Σχήμα 1.17: Σύστημα ελέγχου κλειστού βρόχου Παράσταση Συστήματος ως εξής. Θεωρούμε γραμμικό σύστημα και απλουστευμένες εξισώσεις. Μετράμε ταχύτητα οχήματος στον επίπεδο δρόμο 55 km/h. Θεωρούμε ότι με μοναδιαία αλλαγή στην μεταβλητή εισόδου (πενταλ γκαζιού) προκαλείται αλλαγή στην ταχύτητα ίση με 10 km/h. Επίσης αλλαγή κλίσης στο δρόμο κατά 1%, προκαλεί αλλαγή στην ταχύτητα ίση με 5 km/h (βλέπε δομικό διάγραμμα, 1.18. Για τη λειτουργία Συστήματος Ελέγχου Ανοιχτού Βρόχου, μελετάμε την επίδραση κλίσης 1% στην ταχύτητα των 55 km/h χωρίς ανατροφοδότηση (ανοιχτός βρόχος). Θεωρούμε 1 ρύθμιση ελεγκτή στο 10 . Στον ανοιχτό βρόχο, δεν υπάρχει κλειστή διαδρομή που να ανατροφοδοτει το σήμα της εξόδου στον ελεγκτή. Η ταχύτητα υπολογίζεται Yol = 10(U − 0.5W ) = R − 0.5W ) = R − 5W . Αν W = 0 (επίπεδος δρόμος) και R = 55, τότε η ταχύτητα 10( 10 είναι 55 (δηλ. χώρις σφάλμα). Αν W = 1 (κλίση 1%) και R = 55, τότε η ταχύτητα είναι 50 (δηλ. σφάλμα 5 km/h). Λειτουργία Συστήματος Ελέγχου Κλειστού Βρόχου: 1.1. ΕΙΣΑΓΩΓΗ, ΟΡΙΣΜΟΙ 19 W 0.5 − R U 1 10 Y 10 Σ cruise2ol.ipe Σχήμα 1.18: Σύστημα ελέγχου κλειστού βρόχου Θεωρούμε Συστήμα Ελέγχου Κλειστού Βρόχου. Οι εξισώσεις γίνονται Ycl = 10U − 5W, U = R − 0.9Ycl Ycl = 10R − 9Ycl − 5W = R − W /2 Αν W = 1 (κλίση 1%) και R = 55, τότε η ταχύτητα είναι 54.5 (δηλ. σφάλμα 0.5 km/h, δηλ. το σφάλμα μειώθηκε 10 φορές λόγω της ανατροφοδότησης), 1.19. W 0.5 − R Σ 1 U Σ 10 Y − 0.9 cruise2cl.ipe Σχήμα 1.19: Σύστημα ελέγχου κλειστού βρόχου Παράδειγμα 1.1.4 Σύστημα Ελέγχου Στάθμης Δεξαμενής. Στόχος του συστήματος ελέγχου: η διατήρηση της στάθμης δεξαμενής, αναξάρτητα από την ποσότητα υγρού που αφαιρείται, 1.20. Σχήμα 1.20: Σύστημα ελέγχου κλειστού βρόχου 20 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Παράδειγμα 1.1.5 Σύστημα Ελέγχου Θερμοκρασίας Φούρνου. Στόχος του συστήματος ελέγχου: η διατήρηση της θερμοκρασίας μέσα στον φούρνο, αναξάρτητα από διαταραχές λόγω απωλειών, διαφορετικής πρώτης ύλης, κλπ., 1.21. Σχήμα 1.21: Σύστημα ελέγχου κλειστού βρόχου 1.2 Το Πρόβλημα του Σχεδιασμού Συστημάτων Ελέγχου Πορεία Σχεδιασμού Συστήματος Ελέγχου Επαναληπτική διαδικασία, μέχρι να επιτευχθούν οι προδιαγραφές, 1.22. Σχήμα 1.22: Σύστημα ελέγχου κλειστού βρόχου 1.2. ΤΟ ΠΡΟΒΛΗΜΑ ΤΟΥ ΣΧΕΔΙΑΣΜΟΥ ΣΥΣΤΗΜΑΤΩΝ ΕΛΕΓΧΟΥ 21 Γενικές Παρατηρήσεις Τα φυσικά συστήματα κατά τη λειτουργία τους δέχονται την επίδραση διαταραχών ή θορύβου, που προκαλούν ανακρίβειες στην έξοδο. Στα συστήματα ελέγχου επιδιώκεται να υπάρχει μικρή ευαισθησία της εξόδου στις επιδράσεις εξωτερικών διαταραχών. • Παράδειγμα 1: το πάχος χαρτιού σε μια βιομηχανία παραγωγής χαρτιού θα πρέπει να είναι ανεξάρτητο από την υγρασία. • Παράδειγμα 2: η ταχύτητα μιας μηχανής θα πρέπει να είναι ανεξάρτητη από τις διακυμάνσεις του φορτίου. • Παράδειγμα 3: η γωνιακή θέση κεραίας radar θα πρέπει να είναι ανεξάρτητη από την ταχύτητα του ανέμου. Σε ένα σύστημα ανοιχτού βρόχου (χωρίς ανατροφοδότηση) όταν εισέρχεται μια διαταραχή, η μεταβολή στην έξοδο είναι ανάλογη προς την μεταβολή της εισόδου διαταραχής. Στα φυσικά συστήματα, οι ιδιότητες αλλάζουν με τις συνθήκες περιβάλλοντος (πχ θερμοκρασία, υγρασία) ή αλλοιώνονται με την πάροδο του χρόνου. Τα συστήματα ελέγχου γενικά είναι ανθεκτικά σε μεταβολές των παραμέτρων. • Παράδειγμα 1: η λειτουργική κατάσταση μιας μηχανής είναι διαφορετική μετά από χρήση 10 ετών. • Παράδειγμα 2: η αντίσταση των τυλιγμάτων ενός ηλεκτροκινητήρα μεταβάλλεται κατά την λειτουργία με την αύξηση της θερμοκρασίας. Ανάλυση Συστήματος Πορεία ανάλυσης: προσδιορισμός μαθηματικού μοντέλου στου συστήματος - διερεύνηση λειτουργίας και δυναμικής συμπεριφοράς. Στην παραγματική λειτουργία, η είσοδος ενός συστήματος ελέγχου είναι ένα τυχαίο σήμα, άγνωστο εκ των προτέρων. Κατά την ανάλυση είναι ανάγκη να υπάρχει μία βάση σύγκρισης της απόδοσης των συστημάτων ελέγχου. Γίνεται έτσι χρήση σημάτων εισόδου δοκιμής και σύγκριση των αποκρίσεων των διαφόρων συστημάτων ελέγχου σε αυτά. Συνηθέστερα σήματα εισόδου δοκιμής: συνάρτηση βαθμίδας, αναρρίχησης, κρουστική και ημιτονοειδής. Υπάρχουν 2 τύποι ελεγκτών κλειστού βρόχου: 1. Το σύστημα προσπαθεί να ακολουθεί την είσοδο αναφοράς 2. Το σύστημα προσπαθει να απορρίπτει τις διαταραχές Ο αλγόριθμος που υπολογίζει την εντολή ελέγχου u είναι ο ελεγκτής Κ (controller). Για επιτυχημένο σχεδιασμό του K, θέλουμε απο πριν να ξέρουμε τα χαρακτηριστικά της διαταραχής (d), εισόδου αναφοράς (r), μοντέλου συστήματος (G) και μοντέλου διαταραχής (Gd ). Χρησιμοποιούμε γραμμικά μοντέλα y = G u + Gd d. Είσοδος Αναφοράς Στην περίπτωση αυτή με τροποποίηση της εντολής ελέγχου u, προσπαθούμε να κρατήσουμε την έξοδο y κοντά στην τιμή r της εισόδου αναφοράς (Reference Tracking ή Servo problem), 1.23. 22 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.23: Σύστημα ελέγχου κλειστού βρόχου Απόρριψη Διαταραχής Στην περίπτωση αυτή με τροποποίηση της εντολής ελέγχου u, προσπαθούμε να μειώσουμε την επίδραση της διαταραχής d από το περιβάλλον (Disturbance Rejection), 1.24. Σχήμα 1.24: Σύστημα ελέγχου κλειστού βρόχου Συμβιβασμός μεταξύ Επίδοσης και Ευρωστότητας Η ασάφεια στην περιγραφή του μοντέλου είναι δεδομένη, είναι δε ένας παράγοντας που μειώνει την επίδοση του συστήματος ελέγχου. Όσο μεγαλύτερη είναι η ασάφεια, τόσο πιο μικρή πρέπει να είναι η δράση του ελεγκτή, ώστε να αποφεύγονται προβλήματα όπως υπερακόντιση ή και αστάθεια. Όμως με περιορισμένη την δράση του ελεγκτή, μειώνεται η ικανότητα απόρριψης διαταραχών.Αυτός ο συμβιβασμός είναι ένα απο τα προβλήματα στα συστήματα ελέγχου (tradeoff performance vs. robustness). Σταθεροποίηση Η έννοια της ευστάθειας (stability) είναι θεμελιώδης κατά τον σχεδιασμό Συστημάτων Ελέγχου. Ένα ασταθές Σύστημα Ελέγχου κλειστού βρόχου δεν έχει καμμία χρησιμότητα. Συνεπώς μας ενδιαφέρει η ανάλυση και ο σχεδιασμός ευσταθών συστημάτων. Η ευστάθεια συστήματος με ανατροφοδότηση σχετίζεται με τις θέσεις των ριζών της χαρακτηριστικής εξίσωσης της συνάρτησης μεταφοράς. Ένα σύστημα είναι ευσταθές εάν παραμένει η αποκρισή του εντός ορίων κατά την δίεγερσή του με ένα σήμα με περιορισμένο εύρος Με γραφικό τρόπο (διάγραμμα Nyquist) μπορεί να προσδιοριστεί το περιθώριο λειτουργίας ενός συστήματος με ανατροφοδότηση, μέχρι αυτό να φτάσει στην αστάθεια, λαμβάνοντας υπόψη ακόμη και την ασάφεια του μοντέλου του συστήματος (uncertainty), 1.25. 1.3. ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 23 Σχήμα 1.25: Σύστημα ελέγχου κλειστού βρόχου 1.3 Μοντελοποίηση Δυναμικών Συστημάτων Εισαγωγή Το πρώτο βήμα στη μελέτη συστημάτων ελέγχου είναι η δημιουργία μαθηματικών μοντέλων για το σύστημα που θα ελεγχθεί. Η μεθοδολογία είναι εφαρμόσιμη για κάθε γραμμικό σύστημα. Χρησιμοποιούνται τότε οι μέθοδοι γραμμικών συστημάτων . Η μελέτη της δυναμικής απόκρισης μέσω των μοντέλων γίνεται με 3 τρόπους: στο πεδίο s, με απόκριση συχνότητας και με μεταβλητές χώρου κατάστασης. Στο πεδίο s, το βασικό εργαλείο είναι ο μετασχηματισμός Laplace. Έχει ευρύτατη εφαρμογή κατά την δημιουργία των συναρτήσεων μεταφοράς μεταξύ εξόδου και εισόδου. Η απόκριση συχνότητας μελετά την απόκριση στην περίπτωση που τα σήματα είναι ημίτονα. Οι μεταβλητές χώρου κατάστασης ακολουθούν τις διαφορικές εξισώσεις, ως σύστημα απο εξισώσεις 1ης τάξης. Βήματα κατά την Μοντελοποίηση 1. Αναγνώριση των ορίων του συστήματος (ποιές οι είσοδοι, οι έξοδοι κλπ) 2. Αναγνώριση των στοιχείων αποθήκευσης μάζας, ενέργειας 3. Κατάστρωση διαφορικών εξισώσεων 4. Άγνωστοι παράμετροι προσδιορίζονται με πειραματικές δοκιμές 5. Το μοντέλο επαληθεύεται με πειραματικές δοκιμές, με δεδομένα διαφορετικά από εκείνα που χρησιμοποιήθηκαν για τον προσδιορισμό παραμέτρων Παράδειγμα 1.3.1 Απλό Μηχανικό Σύστημα. Διαφορική εξίσωση μηχανικού συστήματος: x ¨ + bx˙ + kx = fa (t) (1.5) Αντικαθιστούμε το x με x1 και το x˙ με x2 . Έτσι η διαφορική εξίσωση (ΔΕ) δεύτερης τάξης εκφράζεται με ομάδα 2 ΔΕ πρώτης τάξης. x˙ 1 = x2 (1.6) 24 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ x˙ 2 k b = −m x1 − m x2 + fma 1 = −m (−kx1 − bx2 + fa ) (1.7) (1.8) Μεταβλητές x1 , x2 : μεταβλητές κατάστασης. 1.31, όπου Μάζα m, ελατήριο, με k την σταθερά ελατηρίου, αποσβεστήρας, με b τον συντελεστή απόσβεσης, εφαρμοζόμενη δύναμη fa, μετρούμενη μετατόπιση x. Σχήμα 1.26: Σύστημα ελέγχου κλειστού βρόχου Παράδειγμα 1.3.2 Απλό Εκκρεμές 1.27 Σχήμα 1.27: Σύστημα ελέγχου κλειστού βρόχου Παράδειγμα 1.3.3 Σύστημα Ανάρτησης Αυτοκινήτου 1.28 Σχήμα 1.28: Σύστημα ελέγχου κλειστού βρόχου Παράδειγμα 1.3.4 Κινητήρας Συνεχούς Ρεύματος Ελεγχόμενου Οπλισμού Θεωρούμε Κινητήρα Συνεχούς Ρεύματος Ελεγχόμενου Οπλισμού, όπως φαινεται στην εικόνα 1.29. 1.3. ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 25 Σχήμα 1.29: Σύστημα ελέγχου κλειστού βρόχου Ra : αντίσταση τυλίγματος οπλισμού, La : αυτεπαγωγή τυλίγματος οπλισμού, ia : ρεύμα τυλίγματος ολπισμού, if : ρεύμα δίεγερσης πεδίου, ea : τάση εφαρμοζόμενη στον οπλισμό, eb : αντιηλεκτρεγερτική δύναμη, θ: γωνιακή μετατόπιση άξονα, Τ: ροπή στρέψης από τον κινητήρα, J: ισοδύναμη ροπή αδράνειας κινητήρα και φορτίου αναγμένη στον άξονα του κινητήρα, b: ισοδύναμος συντελεστής ιξώδους τριβής κινητήρα και φορτίου αναγμένος στον άξονα του κινητήρα. Μαγνητική ροή διακένου αέρα, Φ, με Kf σταθερά. Φ = kf if (1.9) T = kf if K1 ia (1.10) Ροπή, T, με K1 σταθερά. Επαγόμενη τάση eb ανάλογη προς τη γων. ταχύτητα. eb = k b dθ dt (1.11) Διαφορική εξίσωση κυκλώματος οπλισμού. La = dia + Ra ia + eb = ea dt (1.12) Παραγόμενη ροπή από ρεύμα οπλισμού. J d2 θ dθ +b = T = K ia dt2 dt (1.13) Παράδειγμα 1.3.5 Σύστημα Στάθμης Υγρού. Θεωρούμε Σύστημα Στάθμης Υγρού, 1.30. Q: παροχή υγρού στη μόνιμη κατάσταση, qi : μικρή απόκλιση εισροής από μόνιμη κατάσταση, qO : μικρή απόκλιση εκροής από μόνιμη κατάσταση, H: στάθμη μόνιμης κατάστασης, h: μικρή απόκλιση στάθμης από μόνιμη κατάσταση, C: χωρητικότητα=μεταβολή αποθηκ. υγρού/μεταβολή στάθμης. 26 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.30: Σύστημα ελέγχου κλειστού βρόχου Διαφορική εξίσωση συστήματος: C dh = (qi − qo ) dt (1.14) Από ορισμό αντίστασης, για qo , h είναι qo = h/R ⇒ RC dh + h = R qi dt (1.15) Ασάφεια Μοντέλου Σημαντικό πρόβλημα των συναρτήσεων μεταφοράς των μοντέλων G, Gd είναι (α) η ανακρίβεια (β) οτι μπορεί να μεταβάλλονται με τον χρόνο. Για αυτό το σκοπό, εισάγουμε την έννοια της Ασάφειας Μοντέλου (Model Uncertainty). Έτσι, αντί του μοντέλου G, έχουμε την κλάση μοντέλων Gp = G + E, όπου E η ασάφεια, που είναι φραγμένη συνάρτηση αλλά άγνωστη. Συνήθως ισχύει E = w ∆, όπου η νόρμα του ∆ είναι ≤ 1. 1.3.1 Τύποι Μοντέλων 1. Βασικά μοντέλα (First principles, Fundamental models): προκύπτουν από εφαρμογή νόμων φυσικής, μηχανικής, θερμοδυναμικής. Χρησιμοποιούν εξισώσεις που περιγράφουν την συμπεριφορά της διεργασίας. 2. Εμπειρικά μοντέλα I (Emperical black-box models): προκύπτουν από συσχετισμό πειραματικών δεδομένων εισόδου-εξόδου σε μία διεργασία. 3. Εμπειρικά μοντέλα II (Emperical gray-box models): προκύπτουν από συνδυασμό εμπειρικών και βασικών μοντέλων. Βασικά μοντέλα Κυριώτερα βήματα στην ανάπτυξη μοντέλων 1. Βάση: νόμοι Newton, Kirchhoff, αρχές διατήρησης μάζας, ενέργειας 2. Παραδοχές: γίνεται συμβιβασμός μεταξύ αυστηρής και ικανοποιητικής περιγραφής του συστήματος, για εφαρμογές ελέγχου 1.4. ΠΑΡΑΔΕΙΓΜΑΤΑ ΜΟΝΤΕΛΩΝ 27 3. Επίλυση: είναι απαραίτητο να μπορεί να γίνει επίλυση των εξισώσεων του μοντέλου 4. Επαλήθευση: στο τέλος πρέπει να γίνεται σύγκριση των αποτελεσμάτων της προσομοίωσης με δεδομένα από πραγματική λειτουργία Μεθοδολογία των Βασικών μοντέλων • Απαιτείται αριθμός από θεμελιώδεις μεταβλητές οι οποίες περιγράφουν την κατάσταση του συστήματος, και ονομάζονται μεταβλητές κατάστασης • Χρησιμοποιούνται εξισώσεις που περιγράφουν πως μεταβάλεται η κατάσταση στον χρόνο (εξισώσεις κατάστασης) • Προκύπτει έτσι μια ομάδα από διαφορικές εξισώσεις (ΔΕ) με τις μεταβλητές κατάστασης ως εξαρτημένες μεταβλητές και τον χρόνο ως ανεξάρτητη μεταβλητή • Η επίλυση των ΔΕ περιγράφει την μεταβολή των μεταβλητών κατάστασης στο χρονο, δηλ. την δυναμική συμπεριφορά του συστήματος Μοντελοποίηση-Ανασκόπηση Μεθόδων 1. Αναγνώριση των ορίων του συστήματος (είσοδοι, έξοδοι κλπ) 2. Αναγνώριση των στοιχείων αποθήκευσης (μάζα, ενέργεια κλπ) 3. Αναγνώριση των στοιχείων ροής (θερμότητας, μάζας κλπ) ανάμεσα στα στοιχεία αποθήκευσης 4. Σχηματισμός διαφορικών εξισώσεων για όλα ∑ ∑ τα στοιχεία αποθήκευσης d (reservoir content) = inf lows − outf lows dt 5. Σχηματισμός (μη γραμμικών) αλγεβρικών εξισώσεων για τις ροές ανάμεσα στα στοιχεία αποθήκευσης 1.4 Παραδείγματα Μοντέλων Παράδειγμα 1.4.1 Μηχανικό Σύστημα Ευθύγραμμης Κίνησης. Θεωρούμε μηχανικό σύστημα ευθύγραμμης κίνησης, εικόνα 1.31. Εφαρμόζοντας την εξίσωση κίνησης του νόμου του Newton m¨ x + bx˙ + kx = fa (t) (1.16) Είσοδος είναι η δύναμη fa , έξοδος είναι η μετατόπιση x. Παράμετροι: Μάζα m, ελατήριο σταθεράς k, αποσβεστήρας, με συντελεστή απόσβεσης b, εφαρμοζόμενη δύναμη fa , μετρούμενη μετατόπιση x. 28 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.31: Μηχανικό Σύστημα Ευθύγραμμης Κίνησης Παράδειγμα 1.4.2 Μηχανικό Σύστημα Περιστροφικής Κίνησης Θεωρούμε Μηχανικό Σύστημα Περιστροφικής Κίνησης, 1.32. Εφαρμόζοντας την εξίσωση κίνησης του νόμου του Newton για περιστρεφόμενα συστήματα J ω˙ = ΣT → J ω˙ = T − bω (1.17) . Είσοδος είναι η ροπή στρέψης , έξοδος είναι η γωνιακή ταχύτητα ω. Παράμετροι: Ροπή αδράνειας J, συντελεστής τριβής b, γωνιακή ταχύτητα ω, ροπή στρέψης που εφαρμόζεται στο σύστημα T . b ω T J Σχήμα 1.32: Μηχανικό Σύστημα Περιστροφικής Κίνησης Παράδειγμα 1.4.3 Δίκτυο RLC Θεωρούμε Δίκτυο RLC (αντίσταση, πηνίο, πυκνωτής), 1.33. Με εφαρμογή του νόμου του Kirchhoff προκύπτει η διαφορική εξίσωση του κυκλώματος. L di + Ri + Vc = V dt (1.18) c Είσοδος u: τάση V (t), έξοδος y: τάση στα άκρα του πυκωτή Vc (t), όπου C dV dt = i. Παράδειγμα 1.4.4 Σύστημα Στάθμης Υγρού Θεωρούμε Σύστημα, 1.49. m ˙ in : παροχή εισόδου, m ˙ out : παροχή εξόδου, 1.4. ΠΑΡΑΔΕΙΓΜΑΤΑ ΜΟΝΤΕΛΩΝ 29 R V L i(t) Vc C Σχήμα 1.33: Δίκτυο RLC m ˙ in m(t) m ˙ out h(t) A tank.ipe Σχήμα 1.34: Σύστημα Στάθμης Υγρού m(t): μάζα υγρού στην δεξαμενή, h(t): στάθμη υγρού, A: διατομή εκκροής, F : επιφάνεια δεξαμενής. Διαφορική εξίσωση για τα στοιχεία αποθήκευσης d m(t) = m ˙ in (t) − m ˙ out (t) dt (1.19) H ροή στην έξοδο εκφράζεται με την εξ. Bernoulli, για ασυμπίεστο ρευστό, χωρίς τριβή √ 1 2 ρv = ∆p(t) → v(t) = 2∆p(t)/ρ 2 (1.20) m ˙ out (t) = Aρv(t), ∆p(t) = ρgh(t) (1.21) Επίσης είναι √ dm(t) dh(t) = ρF =m ˙ in (t) − Aρ 2gh(t) (1.22) dt dt Είσοδος είναι η ροή στην είσοδο, m ˙ in (t), έξοδος είναι η μετρούμενη στάθμη, h(t). Στοιχείο αποθήκευσης είναι η μάζα m(t) του υγρού στη δεξαμενή H ροή στην είσοδο, m ˙ in (t), είναι το σήμα ελέγχου, με τιμές που καθορίζονται από τον ελεγκτή. Διάγραμμα Αιτιότητας (Causality Diagram), που περιέχει τις εισόδους, εξόδους, τα στοιχεία αποθήκευσης, 1.35. Σκιασμένα στοιχεία περιέχουν δυναμικά υποσυστήματα, απλά στοιχεία περιέχουν στατικά υποσυστήματα. → 30 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.35: Διάγραμμα Αιτιότητας 1.5 Επίλυση Διαφορικών Εξισώσεων στο Πεδίο του Χρόνου Τις περισσότερες φορές οι διαφορικές εξισώσεις του μοντέλου του συστήματος επιλύονται με αριθμητική μέθοδο ολοκλήρωσης (numerical intergation). Υπάρχουν δυνατότητες επίλυσης σε γλώσσα Fortran, MATLAB κλπ. Στην γλώσσα Fortran ο χρήστης μπορεί να λύσει την διαφορική εξίσωση με μέθοδο ολοκλήρωσης Runge-Kutta. Στο MATLAB η διαφορική εξίσωση λύνεται με την εντολή ode45, όπου χρησιμοποιείται η μέθοδος Runge-Kutta 4ης τάξης. Εναλλακτικός τρόπος επίλυσης της διαφορικής εξίσωσης είναι με χρήση του μετασχηματισμού Laplace, όπως θα δούμε σε επόμενο κεφάλαιο. Παράδειγμα 1.5.1 Παράδειγμα Επίλυσης. Θα δούμε την προσομοίωση συστήματος στάθμης υγρού μεταξύ δύο δεξαμενών, όπως στο Σχήμα 1.36. Η δυναμική συμπεριφορά της στάθμης σε κάθε δεξαμενή θα προκύψει από την επίλυση των διαφορικών εξισώσεων στάθμης υγρού για κάθε δεξαμενή. Το Σχήμα 1.37 παριστάνει το σύστημα στο MATLAB/Simulink. 1.6 Κανονικοποίηση Στόχος Κανονικοποίησης: Με την κανονικοποίηση (Normalization/Scaling) είναι επιθυμητό το μέγεθος (magnitude) των μεταβλητών να γίνει μικρότερο από 1. Μέθοδος: Διαιρείται κάθε μεταβλητή με την μέγιστη αναμενόμενη ή επιτρεπόμενη μεταβολή. Αποτελέσματα: Αποφεύγονται αριθμητικά προβλήματα και διευκολύνεται η σύγκριση αποκρίσεων κατά το σχεδιασμό ελεγκτών. Συχνά λαμβάνεται υπόψη το σημείο ισορροπίας (equilibrium = nominal point). Παράδειγμα 1.6.1 Κανονικοποίηση σε Σύστημα Στάθμης Υγρού. 1.6. ΚΑΝΟΝΙΚΟΠΟΙΗΣΗ 31 in height H1 tank A1 valve 1 height H2 valve 2 flow 1 tank A2 flow 2 out Σχήμα 1.36: Οι δύο δεξαμενές υγρού Σχήμα 1.37: Διάγραμμα προσομοίωσης δεξαμενής υγρού Κανονικοποιούμε με σταθερές (nominal) τιμές αναφοράς (set points), ώστε οι μεταβλητές x(t), u(t) να έχουν τιμή 1. h(t) = hn x(t), m ˙ in (t) = m ˙ in,n u(t), hn ̸= 0, m ˙ in,n ̸= 0 (1.23) Αρχική ΔΕ. ρF √ dh(t) =m ˙ in (t) − Aρ 2gh(t) dt (1.24) Η ΔΕ εκφράζεται πλέον ως. ρF hn √ √ dx(t) =m ˙ in,n u(t) − Aρ 2ghn x(t) dt (1.25) 32 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ 1.7 Γραμμικοποίηση Πολλά συστήματα είναι μη-γραμμικά για ευρείες μεταβολές των παραμέτρων τους. Στα σωστά σχεδιασμένα συστήματα ελέγχου, η ελεγχόμενη μεταβλητή αναμένεται να έχει μικρό εύρος μεταβολής γύρω από την τιμή ισορροπίας. Ο σχεδιασμός του ελεγκτή γίνεται γύρω από σημείο λειτουργίας. Κατά την γραμμικοποίηση, προσδιορίζονται γραμμικές εξισώσεις που ισχύουν για μικρές αποκλίσεις από το σημείο λειτουργίας. Τυπικές μηγραμμικότητες είναι: Χαρακτηριστική καμπύλη κορεσμού και νεκρή ζώνη, 1.38. Σχήμα 1.38: Τυπικές μη-γραμμικότητες: νεκρή ζώνη (αριστερά) και καμπύλη κορεσμού Μη-γραμμική εξίσωση y = f (x) και Κανονικό σημείο λειτουργίας: X0 , Y0 , 1.39. Σχήμα 1.39: Σύστημα ελέγχου κλειστού βρόχου Η καμπύλη είναι συνεχής, άρα γίνεται ανάπτυξη κατά σειρά Taylor, ως εξής. df 1 d2 f |x=X0 (x − X0 ) + |x=X0 (x − X0 )2 + ... dx 2! dx2 Για μικρή απόκλιση (x − X0 ), παραλείπονται οι όροι υψηλής τάξης, έτσι y = f (x) = f (X0 ) + df |x=X0 (x − X0 ) = Y0 + K(x − X0 ) dx με Κ την κλίση στο σημείο λειτουργίας y = f (x) = f (X0 ) + (1.26) (1.27) 1.8. ΕΞΙΣΩΣΕΙΣ ΧΩΡΟΥ ΚΑΤΑΣΤΑΣΗΣ 33 Παράδειγμα 1.7.1 Σύστημα Στάθμης Υγρού. Αρχική κανονικοποιημένη ΔΕ ρF hn √ √ dx(t) =m ˙ in,n u(t) − Aρ 2ghn x(t) dt (1.28) Θεωρούμε μόνο μικρές αποκλίσεις από τις τιμές αναφοράς. Χρησιμοποιούμε νέες μεταβλητές x(t) = 1 + δx(t), |δx| << 1, u(t) = 1 + δu(t), |δu| << 1 (1.29) Ανάπτυξη ΔΕ κατά √ √ σειρά Taylor, όπου οι όροι δεύτερης και άνω τάξης δεν λαμβάνονται υπόψη x(t) → 1 + δx(t) = 1 + 12 δx(t) + .... Έχουμε έτσι γραμμική ΔΕ √ d 1 δx(t) = m ˙ in,n (1 + δu(t)) − Aρ 2ghn (1 + δx(t)) dt 2 √ Θεωρώντας m ˙ in,n = Aρ 2ghn στην ισορροπία, έχουμε ρF hn ρF hn √ d 1 δx(t) = m ˙ in,n δu(t) − Aρ 2ghn δx(t) dt 2 (1.30) (1.31) Θέτουμε ως σταθερά χρόνου την √ F τ= A 2hn g (1.32) Η τελική εξίσωση απλουστεύεται ώς τ d δx(t) = 2δu(t) − δx(t) dt (1.33) 1.8 Εξισώσεις Χώρου Κατάστασης Δυναμική εξίσωση μηχανικού συστήματος m¨ x + bx˙ + kx = fa (t) (1.34) Αντικαθιστούμε το x με x1 και το x˙ με x2 . Έτσι η ΔΕ δεύτερης τάξης εκφράζεται με ομάδα 2 ΔΕ πρώτης τάξης x˙ 1 = x2 x˙ 2 = − k b fa 1 x1 − x2 + = − (−kx1 − bx2 + fa ) m m m m Οι μεταβλητές x1 , x2 ονομάζονται μεταβλητές κατάστασης. Δομικό διάγραμμα μηχανικού συστήματος, 1.40. (1.35) (1.36) 34 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.40: Δομικό διάγραμμα μηχανικού συστήματος Μοντέρνος έλεγχος Η παράσταση του συστήματος γίνεται με τις εξισώσεις κατάστασης. Οι A, B, C, D είναι οι πίνακες του συστήματος. x(t) ˙ = Ax(t) + Bu(t) (1.37) y(t) = Cx(t) + Du(t) (1.38) 1.9 Εφαρμογές: Τρένο MagLev, Εκκρεμές Παράδειγμα 1.9.1 Τρένο MagLev. Ένα τρένο τύπου MagLev (Magnetic Levitation) χρησιμοποιεί μαγνητική ανάρτηση για την έδραση και προώθησή του, 1.41. Σημερινές τυπικές τιμές τελικής ταχύτητας είναι 360 km/h. Σχήμα 1.41: Tρένο τύπου MagLev (Magnetic Levitation) 1.9. ΕΦΑΡΜΟΓΕΣ: ΤΡΕΝΟ MAGLEV, ΕΚΚΡΕΜΕΣ Electromagnet 35 P ower Electronics i H u F y Σ − Light Emitter Light Receiver e Controller maglev.ipe ref mg Σχήμα 1.42: Σύστημα ελέγχου κλειστού βρόχου Τρένο Mag Lev: το Σύστημα Ελέγχου, 1.42 . Μαγνητική Ανάρτηση (Magnetic Levitation), 1.43. Είσοδος (σήμα ελέγχου) είναι το ρεύμα, i, έξοδος είναι η κατακόρυφη μετατόπιση, x. Διαφορική εξίσωση (νόμος του Newton). mx ¨ = f (x, i) − m g (1.39) f (x, i) είναι η δύναμη που προκαλείται από το πεδίο του ηλεκτρομαγνήτη. Η δύναμη f (x, i) περιγράφεται από τις πειραματικές καμπύλες (για σφαίρα διαμέτρου 1 cm, μάζας m = 8.410−3 kg). 1.43. Σχήμα 1.43: Σύστημα ελέγχου κλειστού βρόχου Μαγνητική Ανάρτηση - Καμπύλες Δύναμης, 1.44. 36 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Σχήμα 1.44: Σύστημα ελέγχου κλειστού βρόχου Για ρεύμα i2 = 600 mA και μετατόπιση x1 , η δύναμη f δρά αντίθετα σε δύναμη βαρύτητας mg = 82 ∗ 10−3 N . Άρα το σημείο αυτό (x1 , i2 ) είναι σημείο ισορροπίας (equilibrium). Είναι δυνατή η δημιουργία γραμμικού μοντέλου γύρω από το σημείο x1 , i2 . Γύρω από το σημείο αυτό, η δύναμη δίνεται ως απόκλιση από τις τιμές ισορροπίας f (x1 + δx, i2 + δi) = f (x1 , i2 ) + Kx δx + Ki δi + (2nd order terms...) (1.40) Οι συντελεστές Kx , Ki (γραμμικά κέρδη) βρίσκονται από τις κλίσεις στα σημεία ως εξής: Kx : είναι η κλίση της δύναμης προς το x, στην καμπύλη i = i2 Kx = f1 − f0 82 ∗ 10−3 − 60 ∗ 10−3 N 22 ∗ 10−3 N = = = 14 N /m −3 −3 x1 − x0 2.6 ∗ 10 − 1 ∗ 10 m 1.6 ∗ 10−3 m (1.41) Ki : είναι η μεταβολή της δύναμης πρός το ρεύμα i, για σταθερή μετατόπιση, x = x1 . Για i = 700 mA, στο x = x1 , η δύναμη είναι 122 ∗ 10−3 N και για i = 500 mA, στο x = x1 , η δύναμη είναι 42 ∗ 10−3 N . Ki = 122 ∗ 10−3 − 42 ∗ 10−3 N = 0.4 N /A 700 − 500 mA (1.42) Εξίσωση 2 για την ισορροπία: f (x1 + δx, i2 + δi) = f (x1 , i2 ) + Kx δx + Ki δi (1.43) Θέτοντας τα Kx , Ki στην παραπάνω εξίσωση έχουμε: f = 82 ∗ 10−3 + 14δx + 0.4δi (1.44) Θέτοντας την παραπάνω τιμή της f στην ΔΕ (εξίσωση 1) έχουμε: 8.4 ∗ 10−3 x ¨ = 82 ∗ 10−3 + 14δx + 0.4δi − 82 ∗ 10−3 (1.45) 1.10. ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ MATLAB, SIMULINK37 Εφόσον x = x1 + δx, x ¨ = δx ¨, η παράπανω εξίσωση γίνεται 8.4 ∗ 10−3 δ x ¨ = 14δx + 0.4δi ⇒ (1.46) δx ¨ = 1667 δx + 47.6 δi (1.47) Παράδειγμα 1.9.2 Απλό εκκρεμές Απλό εκκρεμές, 1.45. Σχήμα 1.45: Σύστημα ελέγχου κλειστού βρόχου Αναπτυσσόμενη ροπή στη μάζα m: T = m g sinθ l, με l το μήκος της ράβδου, g την επιτάχυνση της βαρύτητας. Η συνθήκη ισορροπίας της μάζας είναι θ0 = 0 deg . Η μη-γραμμική σχέση μεταθύ γωνίας θ και ροπής Τ δίνεται από το διάγραμμα. Aνάπτυγμα Taylor: y = f (x) = f (X0 ) + df 1 d2 f |x=X0 (x − X0 ) + |x=X0 (x − X0 )2 + ... dx 2! dx2 (1.48) Η γραμμική προσέγγιση γύρω από το σημείο ισορροπίας δίνει T =mgl ∂sinθ |θ=θ0 (θ − θ0 ) = m g l cos(0o )(θ − θ0 ) = m g l θ ∂θ (1.49) Η γραμμική προσέγγιση είναι ικανοποιητική για −π/4 < θ < π/4. Παράδειγμα: η απόκριση του γραμμικού μοντέλου για διαδρομή ±300 βρίσκεται εντός του 2 % της απόκρισης του μη-γραμμικού μοντέλου. 1.10 Επίλυση Εξισώσεων Δυναμικών Συστημάτων στο MATLAB, Simulink Παράδειγμα 1.10.1 Μάζα, ελατήριο, αποσβεστήρας 38 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΔΕ ταλαντωτή m¨ x + cx˙ + kx = fa → x ¨= c k 1 fa − x˙ − x m m m (1.50) Μάζα m = 2 kg, αποσβεστήρας c = 0.7 kg/s, ελατήριο k = 1 N /m. Η συολική παράσταση για την προσομοίωση στο Simulink φαίνεται στη εικόνα 1.46. Σχήμα 1.46: Παράσταση στο Simulink Το σύστημα μάζα-ελατήριο-αποσβεστήρας στο Simulink φαινεται στην εικόνα 1.47. Σχήμα 1.47: Σύστημα ελέγχου κλειστού βρόχου Δίνεται βηματική είσοδος [Step] στον ταλαντωτή και παρατηρείται η έξοδος. Οι μεταβλητές χρόνος (tsim), είσοδος (ref) και απόκριση (yol) αποθηκεύονται στο Workspace. Από τη βιβλιοθήκη του Simulink χρησιμοποιούνται τα ακόλουθα στοιχεία (με λειτουργία ”drag-drop”). 1.10. ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ MATLAB, SIMULINK39 Block Name Step Gain Sum Scope Mux Clock To Workspace Integrator Θέση σε Library Browser Sources Math Operation Math Operation Sinks Signal Routing Sources Sinks Continuous Λειτουργία Βηματική είσοδος Κέρδος (πχ −c/m) Αθροιστής Οθόνη αποτελεσμάτων Συνθέτει 2 σήματα Ρολόι Αποθήκευση μεταβλητής Ολοκληρωτής (1/s) Η απόκριση σε βηματική είσοδο φαίνεται στην εικόνα 1.48. Η γραφική παράσταση μπορεί να αποθηκευτεί ως αρχείο δίνοντας: File | Save as | <filename>.bmp. Σχήμα 1.48: Απόκριση σε βηματική είσοδο MATLAB 1.10.2 Εντολές δημιουργίας γραφικών απόκρισης στο MATLAB. Έχουν αποθηκευτεί στο Workspace οι μεταβλητές χρόνος (tsim), είσοδος (ref) και απόκριση (yol), με μορφή Array. % command line or script (m file) >> plot(tsim,yol); >> hold on >> plot(tsim,ref); >> grid >> xlabel('t [sec]'); >> ylabel('y, ref') Παράδειγμα 1.10.3 Σύστημα Στάθμης Υγρού Σύστημα Στάθμης Υγρού, 1.49. m ˙ in : παροχή εισόδου, m ˙ out : παροχή εξόδου, m(t): μάζα υγρού στην δεξαμενή, h(t): στάθμη υγρού, A: διατομή εκκροής, F : επιφάνεια δεξαμενής. Διαφορική εξίσωση μεταβολής στάθμης h, σε συνάρτηση με την παροχή εισόδου m ˙ in ρF √ dh(t) =m ˙ in (t) − Aρ 2gh(t) → dt (1.51) 40 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ m ˙ in m(t) m ˙ out h(t) A tank.ipe Σχήμα 1.49: Σύστημα ελέγχου κλειστού βρόχου √ A 2gh(t) dh(t) 1 =− + m ˙ in (t) dt F ρF (1.52) Η επίλυση ΔΕ γίνεται με την εντολή ode45. Σύνταξη εντολής ode45: >> help ode45 ODE45 Solve non-stiff differential equations, medium order method. [TOUT,YOUT] = ODE45(ODEFUN,TSPAN,Y0) with TSPAN = [T0 TFINAL] integrates the system of differential equations y' = f(t,y) from time T0 to TFINAL with initial conditions Y0. Χρησιμοποιούνται 2 αρχεία (m les): hdot.m ( Εντολές σχηματισμού ΔΕ) και m1.dot (Εντολές επίλυσης ΔΕ στο MATLAB). Εντολές σχηματισμού ΔΕ (από script hdot.m) function Hdot=hdot(t,H) global RHO G F A Q=34.77; \% inlet flow kg/s k1=-A*sqrt(2*G)/F; k2=1/RHO/F; Hdot=k1*sqrt(H)+k2*Q; Εντολές επίλυσης ΔΕ στο MATLAB (από script m1.m) %- Constants global RHO G F A RHO=1000; % water density (kg/m3) G=9.8; %(m/sec2) F=pi/4; % tank area(m2) A=pi/400; % exit area (m2) 1.10. ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΔΥΝΑΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ MATLAB, SIMULINK41 %- Integrate the ordinary equation t0=0; %Initial time (sec) tf=300; %Final time (sec) H0=0.5; % initial height (m) % [t,H] = ode45('hdot',[t0 tf], H0); % solver, uses script hdot.m % plot(t,H); grid % plot results xlabel('Time (sec)'), ylabel('H (m)') % labels Μεταβολή στάθμης, με αρχική τιμή στάθμης 0.5 m, για χρόνο 0 − 300 s, Επιφ. δεξ. F = 0.7854 m2 , Επιφ. στομίου A = 0.0079 m2 , 1.50. Σχήμα 1.50: Σύστημα ελέγχου κλειστού βρόχου 42 ΚΕΦΑΛΑΙΟ 1. ΟΡΙΣΜΟΙ, ΔΙΑΤΥΠΩΣΗ ΠΡΟΒΛΗΜΑΤΟΣ, ΜΟΝΤΕΛΟΠΟΙΗΣΗ Βιβλιογραφία [1] Κρικέλης Ν., Εισαγωγή στον Αυτόματο Έλεγχο, Συμμετρία, 2000. Κεφ. 1. Εισαγωγή στα συστήματα ελέγχου. Κεφ. 3. Μαθηματικά μοντέλα φυσικών συστημάτων. Κεφ. 4. Προσδιορισμός συναρτήσεων μεταφοράς φυσικών συστημάτων [2] Guzzella, L., Analysis and Synthesis of SISO Control Systems, vfd Zurich, 2009. Ch. 3. System representation and transformation (Παράδειγμα συστήματος στάθμης υγρού). [3] Franklin, G., Powel, D., Enami-Naeimi, A., Feedback Control of Dynamic Systems, Addison Wesley Longman, 5th edition, 2005. Ch. 1. Overview d brief history of feedback control. Ch. 2. Dynamic models and dynamic response. (Παράδειγμα magnetic levitation). [4] Dorf, R., Bishop, R., Modern Control Systems, Prentice-Hall, 2001. Ch. 1. Introduction to control systems. Ch. 2. Mathematical models of systems. 43 44 ΒΙΒΛΙΟΓΡΑΦΙΑ Κεφάλαιο 2 Μετασχηματισμός Laplace 2.1 O Μετασχηματισμός Laplace Κατά την ανάλυση και το σχεδιασμό συστήματος ελέγχου απαιτείται η χρήση μαθηματικού μοντέλου του φυσικού συστήματος, δηλαδή μαθηματική έκφραση που συσχετίζει τη μεταβλητή εξόδου με τη μεταβλητή εισόδου. Στα δυναμικά συστήματα (μηχανικά, ηλεκτρικά, θερμικά, κα) η περιγραφή της συμπεριφοράς γίνεται με διαφορικές εξισώσεις (ΔΕ). Οι ΔΕ είναι γενικά μη γραμμικές, με δύσκολη επίλυση. Για αυτό στην αρχή εισάγεται αρχικά απλουστευμένο γραμμικό μοντέλο, παρέχοντας γενική εικόνα της λύσης. Προσδιορίζονται έτσι γραμμικές ΔΕ. Με χρήση μαθηματικών μεθόδων, όπως του μετασχηματισμού Laplace, επιτυγχάνονται λύσεις των εξισώσεων που περιγράφουν τη συμπεριφορά του συστήματος. Με τη χρήση μετασχηματισμού Laplace, επιτυγχάνεται η μετατροπή κοινών συναρτήσεων (ημιτονοειδών, εκθετικών, κα) σε αλγεβρικές συναρτήσεις μιγαδικής μεταβλητής. Επίσης πράξεις όπως η παραγώγιση και η ολοκλήρωση αντικαθιστώνται από αλγεβρικές πράξεις στο μιγαδικό πεδίο. Έτσι μια γραμμική ΔΕ μετασχηματίζεται σε αλγεβρική εξίσωση μίας μιγαδικής μεταβλητής. Η λύση της γραμμικής ΔΕ βρίσκεται είτε με χρήση πίνακα μετασχηματισμών Laplace είτε με ανάπτυξη σε μερικά κλάσματα. Πλεονεκτήματα χρήσης μετασχηματισμού Laplace είναι: • Χρήση γραφικών μεθόδων (διαγράμματα απόκρισης συχνότητας Bode) στην πρόβλεψη συμπεριφοράς συστήματος χωρίς τη λύση των ΔΕ του συστήματος • Απο τη λύση της ΔΕ προκύπτει ταυτόχρονα η συνιστώσα της μεταβατικής κατάστασης και η συνιστώσα της μόνιμης κατάστασης Ο μετασχηματισμός Laplace μιας συνάρτησης χρόνου f (t) ορίζεται ως ∫ ∞ L{f (t)} = F (s) = f (t) e−st dt 0 όπου f (t) = 0, για t < 0 και s μιγαδική μεταβλητή. 45 (2.1) 46 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE 2.1.1 Μετασχηματισμός Laplace απλών συναρτήσεων Συνάρτηση βαθμίδας (step): (2.2) r(t) = A, t > 0 = 0, t < 0 ∫ ∞ ⇒ L{r(t)} = R(s) = A e−st dt = 0 A s (2.3) Συνάρτηση αναρρίχησης (ramp): (2.4) r(t) = At, t > 0 = 0, t < 0 ∫ ⇒ L{r(t)} = R(s) = A ∞ t e−st dt = 0 A s2 (2.5) 2.1.2 Πίνακας Μετασχηματισμών Laplace f(t) impulse: δ(t) step: h(t) ramp: h(t) h(t).tn .e−α.t h(t).sin(ω.t) h(t).cos(ω.t) F(s) 1 1 s 1 s2 n! (s+α)n+1 ω (s2 +ω 2 ) s2 (s2 −ω 2 ) 2.1.3 Κύριες Ιδιότητες Μετασχηματισμού Laplace Προσεταιρισμός: L{Af (t)} = A L{f (t)} (2.6) L{f1 (t) + f2 (t)} = L{f1 (t)} + L{f2 (t)} (2.7) Άθροιση: Μετάθεση συνάρτησης: L{f (t − a)} = e−as F (s) (2.8) Παραγώγιση: d f (t)} = s F (s) − f (0) dt με f (0) την αρχική τιμή της συνάρτησης f (t), με t = 0. L{ (2.9) Δεύτερη Παράγωγος: L{ d2 f (t)} = s2 F (s) − sf (0) − f˙(0) dt2 (2.10) 2.2. ΣΥΝΑΡΤΗΣΕΙΣ ΜΕΤΑΦΟΡΑΣ 47 με f˙(0) την τιμή της df (t)/dt, στον χρόνο t = 0. Ολοκλήρωση: ∫0 ∫ f (t)dt F (s) L{ f (t)dt} = + −∞ s s (2.11) 2.2 Συναρτήσεις μεταφοράς Οι συναρτήσεις μεταφοράς (Transfer Functions) χαρακτηρίζουν σχέσεις εισόδου/εξόδου γραμμικών, χρονικά αμετάβλητων συστημάτων. Ως συνάρτηση μεταφοράς θεωρούμε το λόγο μετασχηματισμού Laplace εξόδου προς μετασχηματισμό Laplace εισόδου, με αρχικές συνθήκες μηδέν. Θεωρούμε διαφορική εξίσωση an y n + an−1 y n−1 + ... + a1 y˙ + a0 y = bm xm + bm−1 xm−1 + ... + b1 x˙ + b0 x (2.12) Τότε η συνάρτηση μεταφοράς G(s)είναι G(s) = Y (s) bm sm + bm−1 sm−1 + ... + b1 s + b0 = X(s) an sn + an−1 sn−1 + ... + a1 s + a0 (2.13) 2.3 Πόλοι, Μηδενιστές Η μεγαλύτερη δύναμη στον παρονομαστή είναι ίση με την τάξη της μεγαλύτερης παραγώγου της εξόδου. Το πολυώνυμο παρονομαστή εξισωμένο με μηδέν ονομάζεται χαρακτηριστική εξίσωση, επειδή οι ρίζες του καθορίζουν το χαρακτήρα της απόκρισης y(t). Οι ρίζες πολυωνύμου παρονομαστή ονομάζονται πόλοι-(poles). Οι ρίζες πολυωνύμου αριθμητή ονομάζονται μηδενιστές-(zeros). Στους πόλους η συνάρτηση μεταφοράς G(s) γίνεται άπειρη, ενώ στους μηδενιστές η συνάρτηση μεταφοράς γίνεται μηδέν. Η γραφική παράσταση πόλων, μηδενιστών στο μιγαδικό επίπεδο περιγράφει το χαρακτήρα της μεταβατικής απόκρισης του συστήματος. 2.4 Πολυμεταβλητά συστήματα Παράδειγμα συστήματος 2 εισόδων-2 εξόδων. Σχήμα 2.1: Παράδειγμα συστήματος 2 εισόδων-2 εξόδων 48 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE [ Y1 (s) Y2 (s) ] [ G11 (s) G21 (s) = G12 (s) G22 (s) ][ U1 (s) U2 (s) ] (2.14) 2.5 Παραδείγματα Παράδειγμα 2.5.1 Εύρεση συνάρτησης μεταφοράς μηχανικού συστήματος. Δυναμική εξίσωση μηχανικού συστήματος (2.15) m¨ y + by˙ + ky = f (t) Λαμβάνοντας το μετασχηματισμό Laplace κάθε όρου έχουμε L(m¨ y (t)) = m(s2 Y (s) − sy(0) − y(0)) ˙ (2.16) L(by(t)) ˙ = b(sY (s) − y(0)) (2.17) L(ky(t)) = kY (s) (2.18) L(f (t)) = F (s) (2.19) Mε μηδενικές αρχικές συνθήκες, με σημείο αναφοράς την θέση ισορροπίας η ΔΕ γίνεται (ms2 + bs + k)Y (s) = F (s) (2.20) Η συνάρτηση μεταφοράς για είσοδο τη δύναμη f και έξοδο τη μετατόπιση y είναι G(s) = Y (s) 1 = 2 F (s) ms + bs + k (2.21) Θέτοντας τη χαρακτηριστική εξίσωση ίση με το μηδέν ms2 + bs + k = 0 (2.22) οι πόλοι είναι -p1 , -p2 , ώστε (s + p1 )(s + p2 ) = 0. Παράδειγμα 2.5.2 Εύρεση συνάρτησης μεταφοράς περιστροφικού συστήματος, όπως στο Σχήμα 2.2. b ω T J Σχήμα 2.2: Μηχανικό σύστημα περιστροφικής κίνησης 2.5. ΠΑΡΑΔΕΙΓΜΑΤΑ 49 Δυναμική εξίσωση μηχανικού συστήματος περιστροφικής κίνησης Ja = ΣT ⇒ J ω˙ = T − bω (2.23) όπου J ροπή αδράνειας, a γωνιακή επιτάχυνση, γωνιακή ταχύτητα, b συντελεστής τριβής, ροπή στρέψης. Η συνάρτηση μεταφοράς για είσοδο τη ροπή στρέψης T και έξοδο τη γωνιακή ταχύτητα, Ω είναι 1 Ω(s) = G(s) = (2.24) T (s) Js + b Παράδειγμα 2.5.3 Θεωρούμε κινητήρα Συνεχούς Ρεύματος (ΣΡ) ελεγχόμενου οπλισμού. Μαγνητική ροή διακένου αέρα, Φ, με Kf σταθερά Φ = kf if (2.25) T = kf if K1 ia (2.26) Ροπή, T, με K1 σταθερά Επαγόμενη τάση eb ανάλογη προς τη γων. ταχύτητα eb = k b dθ dt (2.27) Διαφορική εξίσωση κυκλώματος οπλισμού La = dia + Ra ia + eb = ea dt (2.28) Παραγόμενη ροπή από ρεύμα οπλισμού J dθ d2 θ +b = T = K ia dt2 dt (2.29) Λαμβάνοντας μετασχηματισμό Laplace, με μηδενικές αρχικές συνθήκες, έχουμε Kb s Θ(s) = Eb (s) = (La s + Ra )Ia (s) + Eb (s) = Ea (s) (2.30) (Js2 + bs)Θ(s) = T (s) = KIa (s) (2.31) ΘεωρούμεEa (s) ως είσοδο, Θ(s) ως έξοδο, με δομικό διάγραμμα όπως στο Σχήμα 2.3. Η συνάρτηση μεταφοράς είναι Θ(s) K = 2 Ea (s) s[La Js + (La b + Ra J)s + Ra b + KKb ] (2.32) Θεωρώντας μικρή την αυτεπαγωγή La , η συνάρτηση μεταφοράς γίνεται Km Θ(s) = Ea (s) s(Tm s + 1) (2.33) 50 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Σχήμα 2.3: Δομικό διάγραμμα κινητήρα Συνεχούς Ρεύματος ελεγχόμενου οπλισμού όπου Km = K Ra b + KKb (2.34) Tm = Ra J Ra b + KKb (2.35) σταθερά κέρδους κινητήρα, χρονική σταθερά κινητήρα. Παράδειγμα 2.5.4 Σύστημα Στάθμης Υγρού. Διαφορική εξίσωση συστήματος C dh = (qi − qo ) dt (2.36) Από ορισμό αντίστασης, για qo , h είναι qo = h dh ⇒ RC + h = R qi R dt (2.37) Μετασχηματισμός Laplace, με μηδενικές αρχικές συνθήκες δίνει (RCs + 1) H(s) = RQi (s) (2.38) Για qi είσοδο και h έξοδο, η συνάρτηση μεταφοράς είναι H(s) R = Qi (s) RCs + 1 (2.39) Για qi είσοδο και qo έξοδο, με Qo (s) = 1/R H(s), η συνάρτηση μεταφοράς είναι Qo (s) 1 = Qi (s) RCs + 1 (2.40) 2.6 Θεώρημα Τελικής Τιμής Μία χρήσιμη ιδιότητα μιας συνάρτησης είναι η τιμή της καθώς ο χρόνος αυξάνεται και προσεγγίζει την μόνιμη κατάσταση (steady state). limt→∞ f (t) = lims→0 [s F (s)] 2.7. ΔΟΜΙΚΑ ΔΙΑΓΡΑΜΜΑΤΑ 51 Παράδειγμα 2.6.1 Παράδειγμα: Θεωρούμε συνάρτηση μεταφοράς δεξαμενής υγρού g= h K = → h = g Fin Fin τs + 1 (2.41) Εφαρμόζοντας Θεώρημα Τελικής Τιμής, για είσοδο βηματικής συνάρτησης Fin = έχουμε lim [s h(s)] = lim [s gFin ] = lim [s g(s) s→0 s→0 s→0 1 K ] = lim ( )=K s→0 τ s + 1 s 1 s (2.42) Άρα στη μόνιμη κατάσταση, η στάθμη θα είναι Κ, για είσοδο μοναδιαίας βαθμίδας. 2.7 Δομικά διαγράμματα Τα Δομικά Διαγράμματα (ΔΔ) (block diagrams) χρησιμοποιούνται για την παράσταση λειτουργίας επιμέρους συνιστωσών ΣΕ. Τα ΔΔ είναι η σχηματική παράσταση λειτουργιών των συνιστωσών. Αποδίδουν την ορθή φορά της ροής των σημάτων και απεκονίζουν τις αλληλεπιδράσεις. Η μαθηματική έκφραση κάθε συναρτησιακού τετραγώνου (block), είναι η συνάρτηση Y (s) μεταφοράς του στοιχείου (συνιστώσας) G(s) = X(s) . Τα συναρτησιακά τετράγωνα συνδέονται με βέλη που δείχνουν τη φορά των σημάτων, με την ιδιότητα της μονής κατεύθυνσης, Σχήμα 2.4. T ransf er F unction G(s) X(s) Y (s) Σχήμα 2.4: Είσοδος και έξοδος σε μια συνάρτηση μεταφοράς Ο ανιχνευτής σφάλματος (error detector, e(t)) ή συγκριτής ή σημείο άθροισης (κύκλος με σύμβολο Σ), παράγει το σήμα που αποτελεί τη διαφορά μεταξύ της εισόδου αναφοράς r(t) και του σήματος ανάδρασης y(t). Η μορφή των ΔΔ συνήθως απλουστεύεται, ώστε το τελικό σύστημα να έχει τα λιγότερα συναρτησιακά τετράγωνα. Ο απλουστευτικός μετασχηματισμός γίνεται βήμα-βήμα, με βάση τους κανόνες της άλγεβρας ΔΔ. Η παράσταση με ΔΔ έχει ευρεία εφαρμογή και ιδιαίτερη πρακτική αξία. Το κέρδος ενός μονού βρόχου (loop) με αρνητική ανατροφοδότηση, δίνεται από το εμπρός κέρδος (Gain G1 ) προς την παράσταση 1+(κέρδος βρόχου). Y1 = G1 R 1 + G1 G2 Κανόνες χειρισμού συναρτησιακών τετραγώνων φαίνονται στο Σχήμα 2.5. (2.43) 52 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Σχήμα 2.5: Κανόνες χειρισμού συναρτησιακών τετραγώνων 2.8 Αντίστροφος Μετασχηματισμός Laplace Ο αντίστροφος μετασχηματισμός Laplace μιας συνάρτησης F (s) ορίζεται ως −1 L 1 {F (S)} = f (t) = 2πj ∫ c+j∞ F (s) e−st ds (2.44) c−j∞ Ως μέθοδος προσδιορισμού του αντιστρόφου μετασχηματισμού Laplace είναι η χρήση πινάκων που περιέχουν ζεύγη συναρτήσεων και αντίστοιχων μετασχηματισμών Laplace. Προκειμένου να εφαρμοστεί η τεχνική ανάπτυξης σε μερικά κλάσματα, πρέπει να είναι γνωστές οι ρίζες του πολυωνύμου του παρονομαστή . F (s) = B(s) k(s + z1 )(s + z2 ) = A(s) (s + p1 )(s + p2 ) (2.45) Σε περίπτωση με διακεκριμένους πόλους, γίνεται ανάπτυξη της F (s) σε μερικά κλάσματα F (s) = B(s) a1 a2 an = + + ... + A(s) (s + p1 ) (s + p2 ) (s + pn ) (2.46) Οι συντελεστές an βρίσκονται ως εξής a1 B(s) a2 = (s + pn ) + (s + pn ) + ... = an A(s) (s + pn ) (s + p1 ) (s + p2 ) s=−pn s=−pn (2.47) 2.9. ΕΠΙΛΥΣΗ ΔΕ 53 Επίσης ισχύει για τον Αντίστροφο Μετασχηματισμό Laplace L−1 { an } = an e−pn t ⇒ (s + pn ) f (t) = L−1 {F (s)} = a1 e−p1 t + a2 e−p2 t + ... + an e−pn t (2.48) (2.49) 2.9 Επίλυση ΔΕ Με τη χρήση μετασχηματισμού Laplace επιτυγχάνεται η πλήρης επίλυση ΔΕ. Η μέθοδος έχει τις εξής τρεις φάσεις: 1. Λαμβάνουμε μετασχηματισμό Laplace κάθε όρου της ΔΕ και έτσι μετατρέπουμε την ΔΕ σε αλγεβρική εξίσωση της μεταβλητής. s 2. Με αλγεβρικές πράξεις βρίσκουμε την έκφραση του μετασχηματισμού Laplace της εξαρτημένης μεταβλητής. 3. Από τον αντίστροφο μετασχηματισμό Laplace της εξαρτημένης μεταβλητής, προσδιορίζεται η χρονική συνάρτηση, που είναι η λύση της ΔΕ. Παράδειγμα 2.9.1 Ζητείται η επίλυση της ΔΕ x ¨ + 4x = f (t) (2.50) όπου f (t) είναι μια συνάρτηση εξωτερικής δράσης (πχ συνάρτηση βαθμίδας). Λαμβάνουμε μετασχηματισμό Laplace κάθε όρου της ΔΕ L{¨ x} = s2 X(s) − sx(0) − x(0) ˙ (2.51) L{4x} = 4X(s) (2.52) L{f (t)} = F (s) (2.53) Τελικά ο μετασχηματισμός Laplace της ΔΕ δίνει (s2 + 4)X(s) − sx(0) − x(0) ˙ = F (s) (2.54) Λύνουμε ως προς X(s) και λαμβάνουμε X(s) = F (s) sx(0) + x(0) ˙ + 2 2 s +4 s +4 (2.55) Από τον αντίστροφο μετασχηματισμό Laplace της εξαρτημένης μεταβλητής βρίσκεται η λύση της ΔΕ. Θεωρούμε ότι η δύναμη f (t) είναι συνάρτηση βαθμίδας, με F (S) = 1/s, οπότε 54 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE x(t) = L−1 | 1 sx(0) + x(0) ˙ | + L−1 | |⇒ 2 + 4) s +4 s(s2 1 1 1 − cos2t + x(0)cos2t + x(0) ˙ sin2t 4 4 2 που είναι και η λύση της ΔΕ. x(t) = (2.56) (2.57) Παράδειγμα 2.9.2 Δίνεται η συνάρτηση μεταφοράς, που περιγράφει τη θέση της κεφαλής σκληρού δίσκου: G(s) = s2 700 + 15s + 100000 (2.58) >> num=700; den=[1 15 1e5]; >> damp(den) Eigenvalue Damping Freq. (rad/s) -7.50e+00 + 3.16e+02i 2.37e-02 3.16e+02 -7.50e+00 - 3.16e+02i 2.37e-02 3.16e+02 Η απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, φαίνεται στο Σχήμα 3.24. Σχήμα 2.6: Η απόκριση του συστήματος σε μοναδιαία βηματική είσοδο >> >> >> >> num=700; den=[1 15 1e5]; ss1=tf(num,den) step(tf(num,den)) S1 = stepinfo(ss1,’RiseTimeLimits’,[0.05,0.95]) Παρατηρούμε ότι παραμένουν ο μεγάλος αριθμός ταλαντώσεων και ο χρόνος αποκατάστασηςsettling time. 2.10. ΑΣΚΗΣΕΙΣ 55 2.10 Ασκήσεις Άσκηση 2.10.1 Θεώρημα Τελικής Τιμής Θεωρούμε τη συνάρτηση μεταφοράς F (s) = 1 ,a > 0 s(s + a) (2.59) Εφαρμόζοντας το Θεώρημα Τελικής Τιμής, έχουμε lim [s F (s)] = lim [ s→0 s→0 1 1 ]= s+a a (2.60) Άρα η συνάρτηση τείνει στο 1/a. Επαληθεύοντας προκύπτει F (s) = 1 1/a 1/a = − s(s + a) s s+a (2.61) Αντίστροφος μετασχηματισμός Laplace δίνει f (t) = 1 (1 − e−a t ) a (2.62) που τείνει στο 1/a, για t → ∞. Η απόκριση στο MATLAB για a = 2 φαίνεται στο Σχήμα 3.1. Σχήμα 2.7: Η απόκριση συστήματος >> tt=0:0.1:10; >> yy=0.5*(1-exp(-0.5*tt)); >> plot(tt,yy); xlabel('time [s]'); ylabel('response') Στο MATLAB οι συναρτήσεις μεταφοράς ορίζονται με τους εξής 2 τρόπους: s . Έστω η συνάρτήση μεταφοράς H(s) = s2 +2s+10 Α’ τρόπος: Δηλώνεται η μεταβλητή s δίνεται η συνάρτηση μεταφοράς ως πολυώνυμο. 56 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE >> s= tf('s'); >> H = s/(s^2 + 2*s +10) Β’ τρόπος: Δίνεται η συνάρτηση μεταφοράς με τους συντελεστες του πολυωνύμου αριθμητή, παρονομαστή. Η= tf([1 0],[1 2 10]) Η εντολή syst=series(sys1,sys2) υπολογίζει το γινόμενο των συναρτήσεων sys1, sys2, ως syst. Η εντολή feedsys = feedback(sys1,sys2) υπολογίζει τη συνάρτηση μεταφοράς κλειστού βρόχου, με αρνητική ανατροφοδότηση, για τις συναρτήσεις sys1, sys2, ως feedsys. Άσκηση 2.10.2 Ζητείται να βρεθεί η απλουστευμένη συνάρτηση μεταφοράς μεταξύ εισόδου r και εξόδου y1 , του Σχήματος 2.8. r u1 Σ y1 G1 + y2 G2 u2 Σχήμα 2.8: Δομικό διάγραμμα Έξοδος αθροιστή: u1 = r + y2 (2.63) y2 = u2 G2 = y1 G2 (2.64) y1 = G1 u1 → (2.65) Έξοδος G2: Έξοδος G1: y1 = G1 (r + y2 ) = G1 r + G1 y2 = G1 r + G1 u2 G2 = G1 r + G1 y1 G2 → (2.66) G1 r = y1 − G1 y1 G2 → y1 = G1 r 1 − G1 G2 (2.67) (2.68) Άσκηση 2.10.3 Ζητείται να βρεθεί η απλουστευμένη συνάρτηση μεταφοράς μεταξύ εισόδου R(s) και εξόδου Y (s), του Σχήματος 2.9. Βήμα 1: Μεταφορά του H2 μετά το G4 (κανόνας 4), Σχήμα 2.10. Βήμα 2: Εξάλειψη βρόχου G3 G4 H1 (κανόνας 6), Σχήμα 2.11. Βήμα 3: Εξάλειψη βρόχου H2 /G4 , Σχήμα 2.12. Βήμα 4: Απλοποίηση βρόχου H3 (κανόνας 6), Σχήμα 2.13. Προκύπτει η τελική (απλουστευμένη) συνάρτηση μεταφοράς μεταξύ εισόδου R(s) και εξόδου Y (s). 2.10. ΑΣΚΗΣΕΙΣ 57 Σχήμα 2.9: Αρχικό δομικό διάγραμμα προς απλούστευση Σχήμα 2.10: Δομικό διάγραμμα συστήματος, μετά το βήμα 1 Άσκηση 2.10.4 Ζητείται να βρεθεί η συνάρτηση μεταφοράς μεταξύ r(s) και y(s), Σχήμα 2.14, (a). Βήμα 1: Απλοποιούμε το βρόχο με τα G1, G3 (b). Βήμα 2: Μεταφέρουμε την είσοδο του G2 (κανόνας 4) (c). Βήμα 3: Οι δύο παράλληλοι βρόχοι δίνουν: (c), Σχήμα 2.15. Y G1G2/(1 − G1G3) G6 = (G5 + )⇒ U 1 − [G1G2G4/(1 − G1G3)] G2 (2.69) Y G1G2G5 + G1G6 = U 1 − G1G3 − G1G2G4 (2.70) Άσκηση 2.10.5 Αντίστροφος Μετασχηματισμός Laplace Να βρεθεί ο Αντίστροφος Μετασχηματισμός Laplace της συνάρτησης F (s) = s+3 (s + 1)(s + 2) (2.71) Γίνεται ανάπτυξη της F (s) σε μερικά κλάσματα F (s) = a1 a2 s+3 = + (s + 1)(s + 2) (s + 1) (s + 2) (2.72) 58 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Σχήμα 2.11: Δομικό διάγραμμα συστήματος, μετά το βήμα 2 Σχήμα 2.12: Δομικό διάγραμμα συστήματος μετά το βήμα 3 s+3 (s + 1) a1 = (s + 1)(s + 2) =2 s+3 a2 = (s + 2) = −1 (s + 1)(s + 2) s=−2 Οπότε: F (s) = (2.73) s=−1 s+3 2 −1 = + (s + 1)(s + 2) (s + 1) (s + 2) Αντίστροφος Μετασχηματισμός Laplace δίνει −1 2 −1 −1 f (t) = L +L ⇒ f (t) = 2e−t − e−2t s + 1 s + 2 (2.74) (2.75) (2.76) Οι αποκρίσεις των δύο όρων καθώς και η συνολική απόκριση φαίνονται στο Σχήμα 2.16. >> subplot(311); yy1=2*exp(-1*tt); plot(tt,yy1); >> subplot(312); yy2=-exp(-2*tt); plot(tt,yy2) >> subplot(313); plot(tt,yy1+yy2) 2.10. ΑΣΚΗΣΕΙΣ Σχήμα 2.13: Δομικό διάγραμμα συστήματος μετά το βήμα 4 Σχήμα 2.14: Δομικό διάγραμμα συστήματος ελέγχου ταχύτητας Σχήμα 2.15: Δομικό διάγραμμα συστήματος ελέγχου ταχύτητας 59 60 ΚΕΦΑΛΑΙΟ 2. ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Σχήμα 2.16: Αποκρίσεις των 2 e−t , −e−2t καθώς και η συνολική απόκριση (κάτω) Βιβλιογραφία [1] Κρικέλης Ν., Εισαγωγή στον Αυτόματο Έλεγχο, Συμμετρία, 2000. Κεφ. 6. Ανάλυση μεταβατικής απόκρισης. [2] Franklin, G., Powel, D., Enami-Naeimi, A., Feedback Control of Dynamic Systems, Addison Wesley Longman, 5th edition, 2005. Ch. 2. Dynamic models and dynamic response. [3] Dorf, R., Bishop, R., Modern Control Systems, Prentice-Hall, 2001. Ch. 5. e performance of feedback control systems. 61 62 ΒΙΒΛΙΟΓΡΑΦΙΑ Κεφάλαιο 3 Ανάλυση Μεταβατικής Απόκρισης Συστημάτων 3.1 Ανάλυση Μεταβατικής Απόκρισης Κατά την ανάλυση συστημάτων ελέγχου, προσδιορίζεται ένα μαθηματικό μοντέλο και ακολουθεί διερεύνηση της δυναμικής συμπεριφοράς. Στην πράξη, δεν είναι γνωστά από πριν τα σήματα εισόδου. Κατά την ανάλυση και σχεδίαση απαιτείται μια βάση σύγκρισης απόδοσης, η οποία επιτυγχάνεται όταν γίνεται χρήση σημάτων εισόδου δοκιμής με συγκεκριμένες προδιαγραφές. Στο παρόν κεφάλαιο εξετάζεται η απόκριση συστημάτων σε απεριοδικά σήματα. Η ανάλυση και σχεδίαση που βασίζεται σε ημιτονοειδή σήματα εξετάζεται στο κεφάλαιο Απόκριση Συχνότητας (Frequency Response). Συνηθέστερα απεριοδικά σήματα εισόδου δοκιμής: συνάρτηση βαθμίδας (step), συνάρτηση αναρρίχησης (ramp), κρουστική συνάρτηση (pulse), συνάρτηση παραβολής (parabolic). Αυτά φαίνονται στο Σχήμα 3.1. Σχήμα 3.1: Απεριοδικά σήματα εισόδου δοκιμής. Συνηθέστερα σήματα εισόδου δοκιμής στο Simulink (Βιβλιοθήκη Sources) φαίνονται στο Σχήμα 3.2. 63 64 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Σχήμα 3.2: Σήματα εισόδου δοκιμής στο Simulink 3.2 Σήματα Εισόδου Δοκιμής • Συνάρτηση βαθμίδας r(t) = A, t > 0 ⇒ L{r(t)} = R(s) = A = 0, t < 0 s (3.1) A = 0, t < 0 s2 (3.2) • Συνάρτηση αναρρίχησης r(t) = At, t > 0 ⇒ L{r(t)} = R(s) = Το σήμα αναρρίχησης είναι το ολοκλήρωμα του σήματος βαθμίδας. • Κρουστική συνάρτηση r(t) = 1/ϵ, 0 ≤ t ≤ ϵ ⇒ L{r(t)} = R(s) = 1 = 0, t > ϵ (3.3) • Συνάρτηση παραβολής r(t) = At2 , t > 0 ⇒ L{r(t)} = R(s) = A = 0, t < 0 s3 Το σήμα παραβολής είναι το ολοκλήρωμα του σήματος αναρρίχησης. 3.3 Χαρακτηριστικά Δυναμικής Συμπεριφοράς Σημαντικά χαρακτηριστικά συμπεριφοράς συστημάτων είναι τα ακόλουθα. (3.4) 3.4. ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ 1ΗΣ ΤΑΞΗΣ 65 • Απόλυτη ευστάθεια γραμμικού χρονικά αμετάβλητου συστήματος: – Σε ισορροπία: χωρίς επίδραση εισόδων/διαταραχών, η έξοδος παραμένει στην ίδια κατάσταση – Ευσταθές: μετά από επίδραση διαταραχών, η έξοδος επανέρχεται σε ισορροπία – Ασταθές: μετά από επίδραση διαταραχών, η έξοδος ταλλαντώνεται ή αποκλίνει απεριόριστα • Σφάλμα μόνιμης κατάστασης: διαφορά της εξόδου από την είσοδο, στη μόνιμη κατάσταση (μετά από τη μεταβατική κατάσταση). Το σφάλμα είναι ενδεικτικό της ακρίβειας του συστήματος. • Χρονική Απόκριση Συστήματος, που αποτελείται από δύο μέρη: μεταβατική απόκριση (transient response), το τμήμα από την αρχική ως την τελική κατάσταση και απόκριση μόνιμης κατάστασης (steady state response), όταν ο χρόνος τείνει στο άπειρο. Εκφράζεται ως: y(t) = yt (t) + yss (t) (3.5) με yt (t) την μεταβατική απόκριση και yss (t) την απόκριση μόνιμης κατάστασης. Κατά την ανάλυση των συστημάτων ελέγχου πρέπει να διερευνάται η συμπεριφορά της μεταβατικής απόκρισης: ο χρόνος αποκατάστασης, το εύρος διακύμανσης, η συμπεριφορά στη μόνιμη κατάσταση. 3.4 Απόκριση Συστημάτων 1ης Τάξης Θεωρούμε σύστημα 1ης τάξης, όπου μπορεί να παριστά κύκλωμα RC (αντίστασηπυκνωτής), θερμικό σύστημα κλπ, όπως φαίνεται στο δομικό διάγραμμα του Σχήματος 3.3. Σχήμα 3.3: Δομικό διάγραμμα. Σχέση εισόδου-εξόδου (μηδενικές αρχικές συνθήκες): Y (s) 1 = R(s) Ts + 1 (3.6) Συστήματα 1ης Τάξης: Απόκριση σε Είσοδο Μοναδιαίας Βαθμίδας Συνάρτηση μοναδιαίας βαθμίδας L{r(t)} = R(s) = A ,A = 1 s (3.7) 66 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Η σχέση εισόδου-εξόδου γίνεται Y (s) = 1 1 1 R(s) = . Ts + 1 Ts + 1 s (3.8) Aνάπτυξη σε μερικά κλάσματα και αντίστροφος μετασχηματισμός Laplace δίνουν y(t) = 1 − e−t/T , t ≥ 0 (3.9) Τ είναι η χρονική σταθερά του συστήματος. Όσο μικρότερη η Τ, τόσο γρηγορότερη η απόκριση. Για t = T , η τιμή εξόδου γίνεται y(T ) = 1 − e−1 = 0.632 (3.10) Στην εκθετική καμπύλη απόκρισης αναγράφονται τα ποσοστά προσέγγισης τελικής τιμής (63.2%, 86.5%, ..., 99.3%). Ως χρόνος απόκρισης θεωρείται η διάρκεια για να φτάσει η απόκριση εντός 2% τελικής τιμής, δηλαδή t ≥ 4Τ. Η απόκριση για τα συστήματα 1ης Τάξης φαίνεται στο Σχήμα 3.4. Σχήμα 3.4: Η απόκριση για συστήματα 1ης Τάξης. MATLAB 3.4.1 Σύστημα 1ης Τάξης-Απόκριση Μοναδιαίας Βαθμίδας, όπως φαίνεται 1 στο Σχήμα 3.5, για το σλυστημα G(s) = s+1 . » step(tf([1],[1 1])) Συστήματα 1ης Τάξης: Απόκριση Μοναδιαίας Κρούσης Για τη συνάρτηση μοναδιαίας κρούσης L{r(t)} = R(s) = 1 ⇒ Y (s) = 1 1 ⇒ y(t) = e−t/T , t ≥ 0 Ts + 1 T Η απόκριση φαίνεται στο Σχήμα 3.6. (3.11) 3.5. ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ 2ΗΣ ΤΑΞΗΣ 67 Σχήμα 3.5: Σύστημα 1ης Τάξης-Απόκριση Μοναδιαίας Βαθμίδας. Σχήμα 3.6: Σύστημα 1ης Τάξης-Απόκριση μοναδιαίας κρούσης. 3.5 Απόκριση Συστημάτων 2ης Τάξης Έστω το σύστημα με συνάρτηση μεταφοράς G(s) = ωn2 s(s + 2ζωn ) (3.12) όπου ωn : φυσική συχνότητα χωρίς απόσβεση (undamped natural frequency) ζ: λόγος απόσβεσης (damping ratio), ζωn = σa : σταθερά εξασθένησης (attenuation constant). Το δομικό διάγραμμα για το σύστημα κλειστού βρόχου 2ης τάξης φαίνεται στο Σχήμα 3.7. Σχήμα 3.7: Το δομικό διάγραμμα για το σύστημα κλειστού βρόχου 2ης τάξης. Το αρχικό σύστημα κλειστού βρόχου γίνεται 68 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Y (s) G ωn2 = = 2 R(s) 1+G s + 2ζωn s + ωn2 Η χαρακτηριστική εξίσωση (θέτοντας τον παρονομαστή=0) είναι s2 + 2ζωn s + ωn2 = 0 (3.13) (3.14) Οι ρίζες της χαρακτηριστικής εξίσωσης ονομάζονται πόλοι του συστήματος. Αντίστοιχα, σε περίπτωση ύπαρξης ριζών στον αριθμητή, αυτές ονομάζονται μηδενιστές. Τα ωn και ζ περιγράφουν τη δυναμική συμπεριφορά συστημάτων 2ης τάξης. • Όταν 0 < ζ < 1, οι πόλοι κλειστού βρόχου είναι μιγαδικοί συζυγείς, και βρίσκονται στο αριστερό ημιεπίπεδο s. Το σύστημα λέγεται ότι έχει υπο-απόσβεση (underdamped) και η μεταβατική απόκριση είναι μια αποσβυνόμενη ταλάντωση. • Όταν ζ = 0, οι πόλοι κλειστού βρόχου είναι μιγαδικοί συζυγείς, και βρίσκονται στον άξονα των φανταστικών Im(s). Η μεταβατική απόκριση δεν καταστέλλεται αλλά ταλαντεύεται συνεχώς. • Όταν ζ = 1, το σύστημα λέγεται ότι έχει κρίσιμη απόσβεση (critically damped). • Όταν ζ > 1, το σύστημα λέγεται ότι έχει υπερ-απόσβεση (overdamped) και η μεταβατική απόκριση δεν έχει ταλάντωση. Παράδειγμα 3.5.1 Παράδειγμα πόλων-μηδενιστών. Θεωρούμε τη συνάρτηση μεταφοράς G(s) = s2 2s + 1 2s + 1 −1 3 = = + + 3s + 2 (s + 1)(s + 2) s+1 s+2 (3.15) Οι πόλοι της G(s) είναι στο s = −1 και s = −2. Λαμβάνοντας αντίστροφο μετασχηματισμό Laplace, έχουμε για τη συνάρτηση g(t) στο χρόνο h(t) = −e−t + 3e−2t , t ≥ 0 (3.16) Βλέπουμε ότι η μορφή της απόκρισης καθορίζεται από τη θέση των πόλων. Καθώς ο όρος e−2t αποσβένεται γρηγορότερα από τον όρο e−t , λέμε ότι ο πόλος στο -2 είναι ”πιο γρήγορος” από τον πόλο στο -1. Στο διάγραμμα πόλων-μηδενιστών, όσο πιο αριστερά βρίσκεται ένας πόλος, τόσο πιο γρήγορα αποσβένεται (πιο γρήγορος) σε σχέση με πόλο που βρίσκεται πιο δεξιά (πιο αργός). Σε περίπτωση πόλου με ύπαρξη μιγαδικού μέρους (s = σ ± jω), η συμπεριφορά είναι ανάλογη των παραμέτρων σ, ω, εφόσον η απόκριση έχει τη μορφή e+σ t cosωt. Για τους πόλους s1 , s2 , η γεωμετρική ερμηνεία των παραμέτρων σ (σταθερά εξασθένησης), ωn (φυσική συχνότητα χωρίς απόσβεση), ωd (αποσβυσμένη φυσική συχνότητα), ζ(λόγος απόσβεσης) φαίνεται στο διάγραμμα πόλων-μηδενιστών, Σχήμα 3.8. Στο MATLAB η εντολή pzmap υπολογίζει τους πόλους και μηδενιστές και κάνει την γραφική παράσταση. Το Σχήμα 3.9 δείχνει πόλους και μηδενιστές της G(s) = 2s2 +5s+1 s2 +2s+3 . Οι αποκρίσεις για διάφορες θέσεις πόλων και για είσοδο παλμού (impulse) φαίνονται στο Σχήμα 3.10, σύμφωνα με το [3], Fig. 5-17. 3.5. ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ 2ΗΣ ΤΑΞΗΣ 69 Σχήμα 3.8: Γεωμετρική ερμηνεία Σχήμα 3.9: Πόλοι, μηδενιστές στο παραμέτρων. MATLAB. Σύνοψη Απόκρισης Βαθμίδας Συστημάτων 2ης Τάξης 0 < ζ < 1 ⇒ s1 , s2 ζ = 1 ⇒ s1 , s2 ζ > 1 ⇒ s1 , s2 ζ = 0 ⇒ s1 , s2 ζ < 0 ⇒ s1 , s2 √ = −ζωn ± jωn 1 − ζ 2 = −ωn √ = −ζωn ± ωn ζ 2 − 1 = ±jωn √ = −ζωn ± jωn 1 − ζ 2 (3.17) (3.18) (3.19) (3.20) (3.21) Η απόκριση συστημάτων 2ης τάξης σε είσοδο μοναδιαίας βαθμίδας συστήματος φαίνεται στο Σχήμα 3.11. Το σύστημα με υπο-απόσβεση 0.5 < ζ < 0.8 πλησιάζει την τελική τιμή πιό σύντομα από τα συστήματα με κρίσιμη ή υπερ-απόσβεση. Η τιμή ζ = 0.707, αντιστοιχεί στην περίπτωση με ίσο πραγματικό και φανταστικό μέρος. Από τα συστήματα με απόκριση χωρίς ταλάντωση (ζ ≤ 1), το σύστημα με κρίσιμη απόσβεση (ζ = 1) είναι το ταχύτερο. Η αποδεκτή περιοχή πόλων φαίνεται διαγραμμισμένη στο Σχήμα 3.12, από [3], Fig. 5-15. Παράδειγμα 3.5.2 Απόκριση Συστημάτων 2ης Τάξης-Παράδειγμα Κινητήρα ΣΡ Ελεγχόμενου Οπλισμού. Ra : αντίσταση τυλίγματος οπλισμού, La : αυτεπαγωγή τυλίγματος οπλισμού, ia : ρεύμα τυλίγματος ολπισμού, if : ρεύμα δίεγερσης πεδίου, ea : τάση εφαρμοζόμενη στον οπλισμό, eb : αντιηλεκτρεγερτική δύναμη, θ: γωνιακή μετατόπιση άξονα, Τ: ροπή στρέψης από τον κινητήρα, J: ισοδύναμη ροπή αδράνειας κινητήρα και φορτίου αναγμένη στον άξονα του κινητήρα, b: ισοδύναμος συντελεστής ιξώδους τριβής κινητήρα και φορτίου αναγμένος στον άξονα του κινητήρα. Το δομικό διάγραμμα (σύστημα G(s)), φαίνεται στο Σχήμα 3.14. 70 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Σχήμα 3.10: Αποκρίσεις για διάφορες θέσεις πόλων-είσοδος παλμού Σχήμα 3.11: Απόκριση σε είσοδο μοναδιαίας βαθμίδας συστήματος 2ης τάξης Συνάρτηση μεταφοράς κλειστού βρόχου (σερβομηχανισμός): Y (s) G(s) = = R(s) 1 + G(s) = {s + F 2J √ + 1 Js2 +F s K +1 = K Js2 + F s + K K/J F 2 ) ( 2J − K J }{s + F 2J − √ F 2 ) − ( 2J K J } (3.22) (3.23) Οι πόλοι κλειστού βρόχου είναι μιγαδικοί συζυγείς όταν και πραγματικοί όταν F 2 − 4JK < 0 (3.24) F 2 − 4JK ≥ 0 (3.25) 3.6. ΠΡΟΔΙΑΓΡΑΦΕΣ ΣΥΣΤΗΜΑΤΩΝ ΕΛΕΓΧΟΥ 71 Σχήμα 3.12: Αποδεκτή περιοχή πόλων Σχήμα 3.13: Κινητήρας ΣΡ Ελεγχόμενου Οπλισμού Ορίζονται οι παράμετροι K F = ωn 2 , = 2ζωn = 2σa J J (3.26) όπου σa : σταθερά εξασθένησης (attenuation constant), ωn : φυσική συχνότητα χωρίς απόσβεση (undamped natural frequency), ζ: λόγος απόσβεσης (damping ratio). 3.6 Προδιαγραφές Συστημάτων Ελέγχου 3.6.1 Προδιαγραφές Μεταβατικής Απόκρισης Βαθμίδας Σε πολλές περιπτώσεις τα επιθυμητά χαρακτηριστικά συμπεριφοράς συστημάτων καθορίζονται στο πεδίο του χρόνου. Συχνά η συμπεριφορά συστημάτων ελέγχου προσδιορίζεται από την μεταβατική απόκριση σε είσοδο μοναδιαίας βαθμίδας, η οποία μπορεί να παραχθεί εύκολα και αντιπροσωπεύει μία δραστική μεταβολή της εισόδου. Τα συστήματα που συσσωρεύουν ενέργεια δεν μπορούν να ανταποκριθούν στιγμιαία σε διγέρσεις εισόδου ή διαταραχές αλλά εμφανίζουν μεταβατικά φαινόμενα. Η Μεταβατική Απόκριση Βαθμίδας εξαρτάται από τις αρχικές συνθήκες. Για διευκόλυνση, ως αρχική συνθήκη λαμβάνεται η ηρεμία του συστήματος, όπου η έξοδος και όλες οι παράγωγοι είναι μηδέν. 72 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Σχήμα 3.14: Δομικό διάγραμμα συστήματος 2ης τάξης 3.6.2 Παράμετροι Προδιαγραφών Μεταβατικής Απόκρισης Βαθμίδας Τα χαρακτηριστικά κατά τη μεταβατική απόκριση φαίνονται στο Σχήμα 3.15 και περιγράφονται όπως παρακάτω. Σχήμα 3.15: Χαρακτηριστικά μεταβατικής απόκρισης βαθμίδας • tr , χρόνος ανύψωσης (rise time): χρόνος που απαιτείται για να ανέλθει η απόκριση από 10% → 90% (για ζ > 1). Σε αυτή την περίπτωση είναι tr ≃ 1.8 ωn (3.27) • ts , χρόνος αποκατάστασης (settling time): χρόνος που απαιτείται για να φτάσει και να παραμείνει η καμπύλη απόκρισης μέσα σε ορισμένα όρια(κριτήρια ζώνης) γύρω από την τελική τιμή (±5%, ±2%). Για κριτήριο ζώνης 2% έχουμε e−ζωn ts = 0.02 ⇒ ts = 4 ζωn (3.28) Για κριτήριο ζώνης 5% έχουμε ts = 3 ζωn (3.29) • Mp , μέγιστη υπερακόντιση (maximum overshoot): είναι η τιμή της μέγιστης κορυφής της καμπύλης απόκρισης μετρούμενης από τη μονάδα. Αντιστοιχεί στον χρόνο 3.6. ΠΡΟΔΙΑΓΡΑΦΕΣ ΣΥΣΤΗΜΑΤΩΝ ΕΛΕΓΧΟΥ κορυφής tp = π ωd 73 και είναι √ 2 Mp = e−πζ/ 1−ζ , 0 ≤ ζ ≤ 1 (3.30) Είναι απ’ ευθείας ένδειξη της σχετικής ευστάθειας του συστήματος εφοσον χαρακτηρίζει την απόσβεση, η οποία παρέχει ένα μέτρο της ποιότητας της απόκρισης. Για παράδειγμα, ο έλεγχος ακτίνας ραδιοισοτόπων, που λόγω υπερακόντισης του σερβομηχανισμού θέσης μπορεί να προκαλέσει σοβαρή βλάβη σε γειτονικούς υγιεις ιστούς μακρυά από τον στόχο. • tp , χρόνος κορυφής (peak time): χρόνος που απαιτείται για να φτάσει η απόκριση στην πρώτη κορυφή της καμπύλης. • td : χρόνος καθυστέρησης (delay time): χρόνος που χρειάζεται για να φτάσει η απόκριση, για πρώτη φορά, στο 50% της τελικής τιμής. 3.6.3 Απόκριση Συστημάτων 2ης Τάξης Είναι δυνατό να υπολογιστεί ο χρόνος ανύψωσης (tr ) σε συνάρτηση με την απόσβεση, ζ. Λαμβάνουμε γραμμική προσέγγιση για 0.3 ≤ ζ ≤ 0.8, όπως φαίνεται στο Σχήμα 3.16, από [Dorf, Bishop], Fig. 5-9. Σχήμα 3.16: Χρόνος ανύψωσης (tr ) σε συνάρτηση με το ζ. Παράδειγμα 3.6.1 Για δεδομένο ζ, η απόκριση είναι πιό γρήγορη για μεγαλύτερο ωn , όπως φαίνεται στο Σχήμα 3.17, Από [Dorf, Bishop], Fig. 5-10. Παράδειγμα 3.6.2 Σύστημα 2ης Τάξης. Θεωρούμε σύστημα με συνάρτηση μεταφοράς G(s) = s2 ωn2 + 2ζωn s + ωn2 όπου δίνουμε είσοδο Μοναδιαίας Βαθμίδας, με ζ = 0.1 − 3, ωn = 1 rad/s. (3.31) 74 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Σχήμα 3.17: Για δεδομένο ζ, η απόκριση είναι πιό γρήγορη για μεγαλύτερο ωn . >> omega=0.1; zeta=0.1; >> step(tf([omega\wedge 2],[1 2*zeta*omega omega\wedge 2])) Η απόκριση φαίνεται στο Σχήμα 3.18, για δίαφορες τιμές του ζ. Σχήμα 3.18: Μεταβατική απόκριση βαθμίδας. Παράδειγμα 3.6.3 Απόκριση συστήματος ελέγχου. 1 Θεωρούμε σύστημα με G = s(s+20) και ελεγκτή 5Ka , σύμφωνα με το δομικό διάγραμμα του Σχήματος 3.19, [Dorf, Bishop], Fig. 5-51. Ως στόχοι για την τελική απόκριση θέλουμε γρήγορη απόκριση (ts < 250 ms) και μικρή υπερακόντιση (Mp < 5%). Θεωρούμε διαταραχή D(s) = 0. Η συνάρτηση μεταφοράς κλειστού βρόχου είναι Y 5Ka 5Ka ωn2 = = 2 = 2 R s(s + 20) + 5Ka s + 20s + 5Ka s + 2ζωn s + ωn2 (3.32) Δηλαδή ωn2 = 5Ka , 2ζωn = 20. Οι εντολές και η απόκριση του συστήματος για τιμές κέρδους Ka = 30 και Ka = 60 φαίνονται στο Σχήμα 3.20. 3.7. ΑΣΚΗΣΕΙΣ 75 Σχήμα 3.19: Δομικό διάγραμμα για το σύστημα ελέγχου Σχήμα 3.20: Εντολές και απόκριση συστήματος 3.7 Ασκήσεις Άσκηση 3.7.1 Δίνεται η συνάρτηση μεταφοράς ηλεκτρικού κυκλώματος: G(s) = s2 0.5s + 30s + 106 (3.33) Θέλουμε να αναλύσουμε τη μεταβατική απόκριση. Υπάρχει ένας μηδενιστής στη θέση z1 = 0. Υπάρχουν δύο πόλοι, που είναι οι λύσεις του πολυωνύμου της χαρακτηριστικής εξίσωσης s2 +30s+106 . Εκφράζουμε τη χαρακτηριστική εξίσωση στη μορφή s2 +2ζωn s+ωn2 . Θεωρούμε ωn τη φυσική συχνότητα χωρίς απόσβεση (undamped natural frequency) και ζ το λόγο απόσβεσης (damping ratio). Η παράμετρος ζ ορίζει πόσο γρήγορα το μέτρο της απόκρισης του συστήματος χωρίς διέγερση αποσβένεται με το χρόνο. Οι ρίζες της χαρακτηριστικής εξίσωσης είναι √ s1 , s2 = ζωn ± jωn 1 − ζ 2 (3.34) Στο συγκεκριμένο παράδειγμα οι πόλοι είναι p1,2 = −15 ± 999.9j (3.35) που σημαίνει ότι η φυσική συχνότητα είναι ωn = 1000 rad/s και ο λόγος απόσβεσης είναι ζ = 0.015. Ο θετικός λόγος απόσβεσης δείχνει ότι το πλάτος της απόκρισης σε 76 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ οποιαδήποτε είσοδο θα αποσβεστεί με το χρόνο λόγω της ύπαρξης του όρου y0 eσt e±jωt (3.36) στην απόκριση του συστήματος. Η απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, για ζ = 0.015 φαίνεται στο Σχήμα 3.21. Η απόκριση είναι αρκετά ταλαντωτική, όμως αποσβένεται. Η απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, για ζ = 1 φαίνεται στο Σχήμα 3.22. Η απόκριση αποσβένεται πολύ γρήγορα, χωρίς ταλαντώσεις. Σχήμα 3.21: Απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, ζ = 0.015. Σχήμα 3.22: Απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, ζ = 1. Ο παρακάτω κώδικας σε MATLAB κάνει τους σχετικούς υπολογισμούς και τυπώνει τις θέσεις των πόλων, μηδενιστών, όπως φαίνονται στο Σχήμα 3.23. MATLAB 3.7.2 >> omega=1000 >> step(tf([0 0.5 0],[1 2*0.015*omega omega^2])) 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 >> ss2=tf([0 0.5 0],[1 2*0.015*omega omega^2]) damp(ss2) Eigenvalue Damping Freq. (rad/s) -1.50e+001 + 1.00e+003i 1.50e-002 1.00e+003 -1.50e+001 - 1.00e+003i 1.50e-002 1.00e+003 % make pole-zero plot pzmap(ss2) Άσκηση 3.7.3 Δίνεται η συνάρτηση μεταφοράς, που περιγράφει τη θέση της κεφαλής σκληρού δίσκου: 700 G(s) = 2 (3.37) s + 15s + 100000 3.7. ΑΣΚΗΣΕΙΣ 77 Σχήμα 3.23: Θέσεις πόλων, μηδενιστών. Μεταβλητή εξόδου είναι η γωνιακή θέση της κεφαλής, (rad) και μεταβλητή εισόδου είναι το ρεύμα που δίνεται στο πηνίο που οδηγεί την κεφαλή, (mA). Θέλουμε να αναλύσουμε τη μεταβατική απόκριση και να δούμε πως μπορεί να βελτιωθεί με την χρήση ελεγκτή. Υπάρχουν δύο πόλοι για το πολυώνυμο 2ου βαθμού της χαρακτηριστικής εξίσωσης. ΄Ετσι έχουμε >> num=700; den=[1 15 1e5]; >> damp(den) Eigenvalue Damping Freq. (rad/s) -7.50e+00 + 3.16e+02i 2.37e-02 3.16e+02 -7.50e+00 - 3.16e+02i 2.37e-02 3.16e+02 Παρατηρούμε ότι η απόσβεση έχει πολύ μικρές τιμές, που θα οδηγήσουν σε ταλάντωση προτού το σύστημα της κεφαλής περιέλθει σε μόνιμη κατάσταση. Οι παρακάτω εντολές δίνουν την απόκριση του συστήματος σε μοναδιαία βηματική είσοδο, όπως φαίνεται στο Σχήμα 3.24. >> ss1=tf(num,den) >> step(tf(num,den)) Για να λάβουμε πληροφορίες για την απόκριση στο MATLAB υπάρχει η εντολή stepinfo. Με παραμέτρους εισόδου [0.05, 0.95] που καθορίζουν τα όρια 5%, 95% αντίστοιχα, λαμβάνουμε: >> S1 = stepinfo(ss1,’RiseTimeLimits’,[0.05,0.95]) S1 = RiseTime: SettlingTime: SettlingMin: SettlingMax: 0.0039 0.5176 9.6939e-004 0.0135 78 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Overshoot: Undershoot: Peak: PeakTime: 92.8179 0 0.0135 0.0099 Βλέπουμε ότι το σύστημα δεν μπορεί να λάβει την επιθυμητή τιμή απόκρισης (=1), εφόσον P eak = 0.0135. Ας δούμε ποιά μπορεί να είναι η επίδραση από τη χρήση ενός συστήματος ελέγχου θέσης της κεφαλής του σκληρού δίσκου, μετρώντας τη θέση σε κλειστό βρόχο. Χρησιμοποιούμε έτσι ελεγκτή τύπου ”αναλογικό-ολοκληρωτικό”, (PI), K(s) = 1 + 1100 s (3.38) δηλ. ως εντολή στο σύστημα ελέγχου δίνεται το γινόμενο (επιθυμητή θέση - τρέχουσα θέση) X K(s). Τοποθετούμε τον ελεγκτή K(s) σε σειρά με το σύστημα G(s) και θέτουμε μοναδιαία ανατροφοδότηση. Η συνάρτηση μεταφοράς κλειστού βρόχου θα είναι GCL (s) = GK 700s + 770000 ⇒ GCL (s) = 3 1 + GK s + 15s2 + 100700s + 770000 (3.39) Οι παρακάτω εντολές δίνουν την απόκριση του συστήματος ελέγχου σε μοναδιαία βηματική είσοδο, φαίνεται στο Σχήμα 3.25. >> num1=[0 0 700 770000]; den1=[1 15 100700 770000]; >> sss2=tf(num1,den1) >> step(tf(num1,den1)); grid Με το σύστημα ελέγχου σε λειτουργία, οι πληροφορίες από την εντολή stepinfo είναι τώρα οι ακόλουθες. >> S = stepinfo(sss2,’RiseTimeLimits’,[0.05,0.95]) S = RiseTime: SettlingTime: SettlingMin: SettlingMax: Overshoot: Undershoot: Peak: PeakTime: 0.3788 0.5224 0.9477 1.0001 0.0055 0 1.0001 0.9447 Παρατηρούμε ότι παρότι παραμένουν μεγάλα ο αριθμός ταλαντώσεων και ο χρόνος αποκατάστασης, το σύστημα λαμβάνει την επιθυμητή τελική απόκριση, P eak = 1.0001. 3.7. ΑΣΚΗΣΕΙΣ Σχήμα 3.24: Απόκριση σε μοναδιαία βηματική είσοδο, χωρίς έλεγχο. 79 Σχήμα 3.25: Απόκριση σε μοναδιαία βηματική είσοδο, με έλεγχο. 80 ΚΕΦΑΛΑΙΟ 3. ΑΝΑΛΥΣΗ ΜΕΤΑΒΑΤΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΥΣΤΗΜΑΤΩΝ Βιβλιογραφία [1] Κρικέλης Ν., Εισαγωγή στον Αυτόματο Έλεγχο, Συμμετρία, 2000. Κεφ. 6. Ανάλυση μεταβατικής απόκρισης. [2] Franklin, G., Powel, D., Enami-Naeimi, A., Feedback Control of Dynamic Systems, Addison Wesley Longman, 5th edition, 2005. Ch. 2. Dynamic models and dynamic response. [3] Dorf, R., Bishop, R., Modern Control Systems, Prentice-Hall, 2001. Ch. 5. e performance of feedback control systems. 81 82 ΒΙΒΛΙΟΓΡΑΦΙΑ Κεφάλαιο 4 Δυναμική Συμπεριφορά 4.1 Εισαγωγή Στο κεφάλαιο αυτό γίνεται μια εισαγωγή στη συμπεριφορά δυναμικών συστημάτων που περιγράφονται με μη γραμμικές διαφορικές εξισώσεις. Στο πλαίσιο αυτό παρουσιάζονται έννοιες όπως σημεία ισορροπίας, ευστάθεια, οριακοί κύκλοι που βοηθούν στην κατανόηση της δυναμικής συμπεριφοράς. Παρουσιάζονται επίσης τρόποι ανάλυσης της συνολικής συμπεριφοράς των λύσεων. Όλα τα παραπάνω χρησιμεύουν στο σχεδιασμό μη γραμμικών συστημάτων ελέγχου, που αναφέρεται συνοπτικά. 4.2 Διαφορικές Εξισώσεις Σύστημα στο χώρο κατάστασης περιγράφεται απο τις εξισώσεις dx = f (x, u), y = h(x, u) (4.1) dt όπου x = (x1 , x2 , ..., xn ) ∈ Rn είναι η κατάσταση, u ∈ Rp είναι η είσοδος και y ∈ Rq είναι η έξοδος. Για συστήματα μονής εισόδου-μονής εξόδου (SISO) θεωρούμε p = q = 1. 4.3 Ποιοτική Ανάλυση Με την ποιοτική ανάλυση (qualitative analysis) μπορούμε να κατανοήσουμε σημαντικές έννοιες σχετικές με την ευστάθεια των μη γραμμικών συστημάτων. Ασχολούμαστε με συστήματα που έχουν δύο μεταβλητές κατάστασης, x ∈ R2 , ώστε να μπορούμε να παρουσιάσουμε τις λύσεις τους στο επίπεδο (x1 , x2 ). Η οικογένεια όλων των τροχιών (trajectories) ή λύσεων ονομάζεται πορτραίτο φάσεων (phase portrait), χωρίς να παρουσιάζεται ο χρόνος. Έτσι χαρακτηρίζουμε τη συμπεριφορά του δυναμικού συστήματος από τη μορφή των τροχιών και για αυτό το λόγο θεωρούμε την ανάλυση ποιοτική και όχι ποσοτική. Για παράδειγμα, κλειστή τροχιά δείχνει περιοδική λύση, δηλ. το σύστημα έχει παραμένουσα ταλάντωση. Ένα σπιράλ που συρικνώνεται υποδηλώνει ταλάντωση με απόσβεση. 83 84 ΚΕΦΑΛΑΙΟ 4. ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ 4.3.1 Πορτραίτα Φάσεων Θεωρούμε dx = F (x) dt (4.2) όπου x ∈ Rn . Το βέλος σε κάθε σημείο δείχνει την ταχύτητα σε αυτό το σημείο. Στο MATLAB χρησιμοποιείται η εντολή quiver(X,Y,U ,V), που τυπώνει διανύσματα ταχυτήτων σαν βέλη με στοιχεία (u,v) στα σημεία (x,y). Παράδειγμα 4.3.1 Πορτραίτα φάσεων. Θέλουμε να δημιουργήσουμε το πορτραίτο φάσεων του συστήματος x˙ 1 = −x1 − 2x2 x21 , x˙ 2 = −x1 − x2 (4.3) στην περιοχή 0.5 ≤ x1 ≤ 0.5, −0.5 ≤ x2 ≤ 0.5. Ο παρακάτω κώδικας MATLAB δημιουργεί το Σχήμα 4.1. Σχήμα 4.1: Πορτραίτο φάσεων: διανυσματικό πεδίο ταχυτήτων % file: ex4_3_1.m % example 4.3.1 [x1, x2] = meshgrid(-.5:0.05:0.5, -.5:.05:.5); x1dot = -x1 - 2 *x2 .*x1.^2+x2; % Note the use of .* and .^ x2dot = -x1-x2; quiver(x1,x2,x1dot, x2dot) Παράδειγμα 4.3.2 Πορτραίτα φάσεων. Θέλουμε να δημιουργήσουμε το πορτραίτο φάσεων του συστήματος εκκρεμούς x˙ 1 = x2 , x˙ 2 = −10sin(x1 ) (4.4) στην περιοχή 0.5 ≤ x1 ≤ 0.5, −0.5 ≤ x2 ≤ 0.5. Ο παρακάτω κώδικας MATLAB δημιουργεί το Σχήμα 4.2. Το χωριστό αρχείο lin.m περιέχει τις διαφορικές εξισώσεις. 4.3. ΠΟΙΟΤΙΚΗ ΑΝΑΛΥΣΗ 85 Σχήμα 4.2: Πορτραίτο φάσεων. Η αριστερή εικόνα δείχνει το διανυσματικό πεδίο ταχυτήτων και το πορτραίτα φάσεων, για x0 = [0.3; 0.3]. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [0.3; 0.3]. % file: lin.m -------------------------------------% system of diff. equations system with two variables. function dx = lin(t,x) dx=zeros(2,1); dx(1)=x(2); % x1dot=x2 dx(2)=-10*sin(x(1)); % end of file ------------------------------------% file: phases.m ------------------------------------t0=0; %Initial time (sec); tf=5; % Final time (sec) %x0=[0.5;0.5]; % initial values; %x0=[0.2;0.2]; % initial values x0=[0.3;0.3]; % initial values [tt,x] = ode45(@lin,[t0 tf], x0); % solver, uses script lin.m plot(tt,x(:,1)); grid % plot results hold on; plot(tt,x(:,2),'r--'); grid % plot results legend('x1','x2') % plot vector field [x1v, x2v] = meshgrid(-0.6:0.1:0.6, -0.6:0.1:0.6); x1dot=x2v; x2dot=-10*sin(x1v); quiver(x1v,x2v,x1dot, x2dot); hold on % plot results in x1-x2 plane plot(x(:,1),x(:,2)); legend('0.3;0.3'); xlabel('x1'), ylabel('x2') 86 ΚΕΦΑΛΑΙΟ 4. ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ 4.3.2 Σημεία Ισορροπίας, Οριακοί Κύκλοι Σημείο ισορροπίας (equilibrium point) δυναμικού συστήματος αποτελεί κάποια σταθερή κατάσταση της δυναμικής. Έτσι, για το δυναμικό σύστημα dx = F (x) dt (4.5) η κατάσταση xe αποτελεί σημείο ισορροπίας εαν F (xe ) = 0. Εαν το δυναμικό σύστημα έχει αρχική συνθήκη x(0) = xe τότε θα παραμείνει στο σημείο ισορροπίας x(t) = xe , για κάθε t ≥ 0, όπου t0 = 0. Τα σημεία ισορροπίας είναι ένα από τα πιο σημαντικά χαρακτηριστικά ενός δυναμικού συστήματος, εφόσον ορίζουν εκείνες τις καταστάσεις που αντιστοιχούν σε σταθερές συνθήκες λειτουργίας. Ένα δυναμικό σύστημα μπορεί να έχει κανένα, ένα ή περισσότερα σημεία ισορροπίας. Τα μη γραμμικά συστήματα παρουσιάζουν ποικίλη συμπεριφορά και αποτελούν σημαντικό πεδίο έρευνας στα συστήματα ελέγχου. Ένα άλλο χαρακτηριστικό τους εκτός από τα σημεία ισορροπίας είναι η ύπαρξη σταθερών περιοδικών λύσεων, με μεγάλη πρακτική σημασία σε συστήματα με ημιτονοειδή ή περιοδικά σήματα. Θεωρούμε ένα ηλεκτρονικό ταλαντωτή, με εξισώσεις dx1 = x2 + x1 (1 − x21 − x22 ) dt (4.6) dx2 (4.7) = −x1 + x2 (1 − x21 − x22 ) dt Το πορτραίτο φάσεων (Σχήμα 4.3) δείχνει ότι οι λύσεις στο επίπεδο φάσεων συγκλίνουν σε μία κυκλική τροχιά. Στο πεδίο του χρόνου αυτό αντιστοιχεί σε ταλάντωση με σταθερό εύρος. Ο κύκλος στα μαθηματικά ονομάζεται οριακός κύκλος (limit cycle). Σχήμα 4.3: Πορτραίτο φάσεων ενός ηλεκτρονικού ταλαντωτή. Η αριστερή εικόνα δείχνει τα πορτραίτα φάσεων, για διάφορες αρχικές τιμές. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [0.1; 0]. Για τα συστήματα 2ης τάξης, υπάρχουν μέθοδοι για τη εύρεση οριακών κύκλων. Για συστήματα υψηλότερης τάξης χρησιμοποιούνται μέθοδοι προσομοίωσης, με διαφορετικές αρχικές συνθήκες. 4.4. ΕΥΣΤΑΘΕΙΑ 87 4.4 Ευστάθεια Η ευστάθεια (stability) μίας λύσης καθορίζει κατά πόσον άλλες λύσεις, κοντά στη λύση, παραμένουν κοντά, πλησιάζουν ή απομακρύνονται από αυτή. Σε όλα τα συστήματα ελέγχου, η ευστάθεια αποτελεί την πρωταρχική απαίτηση. Στη θεωρία των συστημάτων ελέγχου, οι έννοιες της ευστάθειας με ευρεία εφαρμογή σχετίζονται με την ευστάθεια κατά Lyapunov . 4.4.1 Ορισμοί Μία λύση είναι ευσταθής αν άλλες λύσεις που ξεκινούν κοντά στο a παραμένουν κοντά στο x(t; a). Σε αυτή την περιπτωση μία λύση x(t; b) δεν θα πλησιάσει το x(t; a) με την πάροδο του χρόνου αλλά θα παραμείνει κοντά του. Πολλές φορές η ευστάθεια αυτή ονομάζεται ευστάθεια κατά Lyapunov. Στην περίπτωση που οι τροχιές δεν συγκλίνουν, τότε η λύση ονομάζεται ουδέτερα ευσταθής (neutrally stable). Σημαντική ειδική περίπτωση αποτελεί η λύση x(t; a) = xe , δηλ. σημείο ισορροπίας. Τότε λέμε ότι το σημείο ισορροπίας είναι ευσταθές. Ένα παράδειγμα φαίνεται στο Σχήμα 4.4, για το σύστημα x˙ 1 = x2 (4.8) x˙ 2 = −x1 (4.9) Σχήμα 4.4: Πορτραίτο φάσεων και χρονική απόκριση για σύστημα με ένα ευσταθές σημείο ισορροπίας. Η αριστερή εικόνα δείχνει τα πορτραίτα φάσεων, για διάφορες αρχικές τιμές. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [1.5; 1.5]. Μία λύση x(t; a) είναι ασυμπτωτικά ευσταθής (asymptotically stable) αν είναι ευσταθής κατά Lyapunov και επιπλέον είναι x(t; b) −→ x(t; a), με t −→ ∞, για b κοντά στο a. Είναι η περιπτωση όπου όλες οι γειτονικές τροχιές συγκλίνουν σε μία ευσταθή λύση μετα από μεγάλο χρόνο. Ένα παράδειγμα φαίνεται στο Σχήμα 4.5, για το σύστημα x˙ 1 = x2 A. Lyapunov (1857-1918) Ρώσσος μαθηματικός και μηχανικός (4.10) 88 ΚΕΦΑΛΑΙΟ 4. ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ x˙ 2 = −x1 − x2 (4.11) Σχήμα 4.5: Πορτραίτο φάσεων και χρονική απόκριση για σύστημα με ένα ασυμπτωτικά ευσταθές σημείο ισορροπίας. Η αριστερή εικόνα δείχνει τα πορτραίτα φάσεων, για διάφορες αρχικές τιμές. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [1; 0]. Τέλος, μία λύση x(t; a) είναι ασταθής (unstable) αν δεν είναι ευσταθής. Ένα τέτοιο παράδειγμα φαίνεται στο Σχήμα 4.6, για το σύστημα x˙ 1 = 2x1 − x2 (4.12) x˙ 2 = −x1 − 2x2 (4.13) Σχήμα 4.6: Πορτραίτο φάσεων και χρονική απόκριση για σύστημα με ένα ασταθές σημείο ισορροπίας. Η αριστερή εικόνα δείχνει τα πορτραίτα φάσεων, για διάφορες αρχικές τιμές. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [0; 0]. 4.5. ΕΥΣΤΑΘΕΙΑ ΚΑΤΑ LYAPUNOV 89 4.4.2 Ευστάθεια Γραμμικών Συστημάτων Ένα γραμμικό σύστημα έχει τη μορφή dx = Ax, x(0) = x0 (4.14) dt με A ∈ RnXn ένα συμμετρικό πίνακα που αντιστοιχεί στο δυναμικο πίνακα ένος γραμμικού συστήματος ελέγχου. Για ένα γραμμικό σύστημα, η ευστάθεια της ισορροπίας στην αρχή (origin) μπορεί να καθοριστεί από τις ιδιοτιμές του πίνακα A. λ(A) = {∈ C : det(sI − A) = 0} (4.15) Η ιδιοτιμή λi είναι η i−οστή ιδιοτιμή του πίνακα A. Ευκολότερα αναλύεται η περίπτωση γραμμικού συστήματος όπου ο πίνακας έχει διαγώνια μορφή. Τότε η εξίσωση του συστήματος έχει τη μορφή λ1 0 λ2 dx = (4.16) x .. dt . 0 λn Γράφουμε τη λύση ως n ανεξάρτητα συστήματα x˙ i = λi xi (4.17) xi (t) = eλi t x(0) (4.18) όπου η κάθε λύση έχει τη μορφή Άλλη απλή περίπτωση είναι όταν ο πίνακας έχει μπλοκ-διαγώνια μορφή, ως σ1 ω1 0 0 −ω1 σ1 0 0 dx . .. x . . . (4.19) = 0 . 0 . . dt 0 0 σ1 ω1 0 0 −ω1 σ1 Σε αυτή την περιπτωση, οι ιδιοτιμές είναι λj = σj ±iωj . Το σύστημα είναι ασυμπτωτικά ευσταθές αν και μόνον αν σj = Re{λj } < 0. 4.5 Ευστάθεια κατά Lyapunov Ένα μη γραμμικό σύστημα έχει τη μορφή dx = F (x), x ∈ Rn (4.20) dt Στο σημείο αυτό θα παρουσιαστούν τεχνικές ώστε να καθοριστεί η ευστάθεια μη γραμμικών συστημάτων. Μας ενδιαφέρει η ευστάθεια σημείων ισορροπίας και για διευκόλυνση θα υποθέσουμε ότι το xe = 0 είναι το σημείο ισορροπίας που μας ενδιαφέρει. Αν κάτι τέτοιο δεν ισχύει, ξαναγράφουμε τις εξισώσεις σε ένα νέο σύστημα συντεταγμένων, z = x − xe . 90 ΚΕΦΑΛΑΙΟ 4. ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ 4.5.1 Συναρτήσεις Lyapunov Μία συνάρτηση Lyapunov V : Rn → R μοιάζει με συνάρτηση ενέργειας, η οποία μπορεί να χρησιμοποιηθεί για να καθορισει την ευστάθεια ενός συστήματος. Πρακτικά, εαν μπορεί να βρεθεί μία μη-αρνητική συνάρτηση που πάντα θα μειώνεται κατά μήκος των τροχιών του συστήματος, καταλήγουμε στο συμπέρασμα ότι το ελάχιστο της συνάρτησης είναι ένα (τοπικά) ευσταθές σημείο ισορροπίας. Θεώρημα 4.5.1 (Ευστάθεια Lyapunov). Έστω V μια μη-αρνητική συνάρτηση στο Rn και V˙ η παράγωγος στο χρόνο της V κατά μήκος των τροχιών του συστήματος 4.20. ∂V ∂V dx = F (x) V˙ (x) = ∂x dt ∂x (4.21) Έστω Br = Br (0) μία σφαίρα ακτίνας r γύρω από την αρχή. Αν υπάρχει r > 0 ώστε η V είναι θετικά ορισμένη και η V˙ είναι αρνητικά ημι-ορισμένη για κάθε x ∈ Br , τότε το x = 0 είναι τοπικά ευσταθές κατά Lyapunov. Αν η V είναι θετικά ορισμένη και η V˙ είναι αρνητικά ορισμένη στο Br , τότε το x = 0 είναι τοπικά ασυμπτωτικά ευσταθές. Αν η V ικανοποιεί μία από τις παραπάνω συνθήκες, ονομάζουμε την V συνάρτηση Lyapunov του συστήματος. 4.6 Μη γραμμικός Έλεγχος με Μέθοδο Lyapunov Σε περίπτωση που είναι επιθυμητό να υπάρχει μη γραμμικός ελεγκτής, μπορούμε να χρησιμοποιήσουμε συναρτήσεις Lyapunov στο σχεδιασμό του ελεγκτή, ώστε να υπάρξει ευσταθής συμπεριφορά. Στην αρχή απαιτείται η εύρεση κατάλληλης συνάρτησης Lyapunov V (x) και ένα σύστημα ελέγχου x˙ = f (x, u). Ονομάζουμε την V (x) συνάρτηση Lyapunov ελέγχου (control Lyapunov function-CLF), εαν για κάθε x υπάρχει u τέτοιο ώστε ∂V V˙ (x) = f (x, u) < 0 ∂x (4.22) Σε αυτή την περίπτωση, είναι δυνατό να βρεθεί κατάλληλη συνάρτηση α(x) ώστε η u = α(x) σταθεροποιεί το σύστημα. Αν η V (x) είναι CLF τότε ένος νόμος ελέγχου u = α(x) δίνεται από τη σχέση του Sontag √ { ∂V ∂V 2 4 f + ( ∂V ∂x f ) +( ∂x g) − ∂x , ∂V ∂V ∂x g ̸= 0 u = αS (x) = ∂x g ∂V 0, ∂x g = 0(4.23) Παράδειγμα 4.6.1 [Kokotovic, example 2.5] Για το σύστημα x˙ = cosx − x3 + u ζητάμε να σχεδιαστεί ελεγκτής που σταθεροποιεί σε σημείο ισορροπίας x = 0. (4.24) 4.7. ΑΝΑΦΟΡΕΣ 91 Θεωρούμε ως CLF την V = 1 2 x 2 (4.25) και σύμφωνα με τον τύπο του Sontag έχουμε √ us = αs (x) = x3 − x x4 + 1 (4.26) Το Σχήμα 4.7 παρουσιάζει τις φάσεις και τη χρονική απόκριση των καταστάσεων στο Simulink. Σχήμα 4.7: Η αριστερή εικόνα δείχνει τα πορτραίτα φάσεων, για διάφορες αρχικές τιμές. Η δεξιά εικόνα δείχνει τη χρονική απόκριση των καταστάσεων x1 , x2 , για x0 = [7]. Το Σχήμα 4.8 παρουσιάζει το δομικό διάγραμμα με το σύστημα και τον μη γραμμικό ελεγκτή στο Simulink. 4.7 Αναφορές Το υλικό του κεφαλαίου αυτού βασίστηκε στα [1], [3] και [2]. Το παράδειγμα 4.6.1 πρέρχεται από το [3]. 92 ΚΕΦΑΛΑΙΟ 4. ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ Σχήμα 4.8: Δομικό διάγραμμα με το σύστημα και τον ελεγκτή στο Simulink. Βιβλιογραφία [1] Khalil, H., Nonlinear Systems, 3rd edition, Prentice Hall, 2002. [2] Murray, R., Astrom, K., Feedback Systems, edition v2.7a„ California Institute of Technology, internet, 2007. [3] Krstic, M., Kanellakopoulos, I., Kokotovic, P., Nonlinear and Adaptive Control Design, John Wiley & Sons Inc., 1995. 93
© Copyright 2026 Paperzz