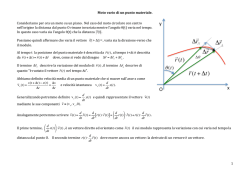
Moto nello spazio tridimensionale La localizzazione spazio-temporale di un ‘evento’ (es.: il punto materiale P si trova in un certo posto ad un dato istante con una data velocità) richiede : - la definizione di un sistema di coordinate definizione di un punto arbitrario “origine” O e di un sistema di assi rispetto ai quali misurare gli spostamenti (distanze e/o angoli) Nella “Meccanica classica” (“newtoniana”), le proprietà geometriche dello spazio sono le stesse (quelle della “geometria euclidea”) in ogni punto dello spazio - la definizione di un modo di misurare il tempo : in Meccanica classica, è un parametro assoluto che ordina la successione degli eventi in un dato punto nella stessa maniera in ogni punto dello spazio ed in tutti i sistemi di coordinate (anche in moto relativo uno rispetto all’altro) : esso è misurato da “orologi” (sistemi fisici che esibiscono fenomeni periodici) il cui procedere è assunto essere lo stesso in tutti i punti dello spazio e indipendentemente dal loro stato di moto ⇒ assolutezza del concetto di “contemporaneità” di eventi in punti diversi dello spazio 1 U.Gasparini, Fisica I Grandezza vettoriale E’ definita dandone un modulo (che ne specifica la grandezza in una data unità di misura), una direzione e un verso “prototipo” di una grandezza vettoriale: spostamento r rispetto ad un punto dello spazio P direzione r O “modulo” di r modulo, direzione e verso sono “proprietà intrinseche” della grandezza vettoriale ( indipendenti dal sistema di coordinate scelto per rappresentarle) - definito un sistema di coordinate, nello spazio tridimensionale una grandezza vettoriale è individuata da tre numeri, “componenti” del vettore che la rappresenta nel sistema dato - le componenti di un vettore soddisfano determinate “proprietà di trasformazione” per cambiamenti del sistema di coordinate, in modo tale da rispettare la invarianza delle proprietà intrinseche del vettore Sistemi di coordinate Coordinate cartesiane ortogonali: z P = P(x,y,z) r y x Coordinate cilindriche: z P = P(R,ϕ,z) r y R x ϕ Coordinate sferiche : z θ x U.Gasparini, Fisica I ϕ r P = P(r,ϕ,θ) y 3 Trasformazione delle coordinate di un vettore z ζ P=(x,y,z) r O x Caso bidimensionale: y ψ P=(ξ,ψ,ζ) r ⇒ y Trasformazione di coordinate: ξ= ξ(x,y,z) ψ=ψ(x,y,z) ζ= ζ(x,y,z) ψ O ξ x2 + y2 + z2 = ξ2 + ψ 2 + ζ 2 la lunghezza del vettore è conservata P=(x,y) = (ξ,ψ) ξ ψ(x,y) = - x sin(θ) + y cos(θ) θ x ξ(x,y) = x cos(θ) + y sin(θ) Rotazione del sistema di coordinate in un piano: y ψ x P y co sϑ y r =OP ϑ ψ = − x sin ϑ + y cos ϑ O x s in ϑ ξ y s in ϑ x co sϑ x ξ = x c o s ϑ + y sin ϑ r 2 → = O P = ξ 2 + ψ x 2 co s 2 2 = ( x c o s ϑ + y s in ϑ ) ϑ + y 2 s in 2 x 2 (c o s 2 ϑ + s in 2 2 = ϑ + 2 x y c o s ϑ s in ϑ x = + ( − x s in ϑ + y c o s ϑ ) 2 2 sin ϑ ) + y 2 2 ϑ + y (c o s 2 2 cos 2 ϑ − 2 xy cos ϑ + s in 2 ϑ ) = x ϑ sin 2 + y La trasformazione : (x,y) ⇔ (ξ,ψ ) mantiene invariante l’espressione x 2 + y 2 = ξ che rappresenta il modulo del vettore r : 2 + ψ 2 OP è una quantità scalare ϑ 2 Operazioni con i vettori • Prodotto di un vettore per una quantita’ scalare: b=sa a a = (ax , ay , az ) b = s a = (s ax , s ay , s az ) • Somma di due vettori : ⇒ “regola del parallelogramma” b c =a + b cx = ax + bx cy = ay + by cz = az + bz c a Vale la proprietà commutativa : a + b = b + a U.Gasparini, Fisica I 6 Versori • “Versore” u : r u = vettore di modulo unitario: u 2 x + u 2 y + u z2 = 1 • Versori degli assi coordinati : z u x = (1,0,0) u y = (0,1,0) u z = (0,0,1) uz ux y uy x • Espressione di un vettore in funzione dei versori degli assi coordinati : a = ayux+ ayuy + azuz z a azuz axux x U.Gasparini, Fisica I y ayuy 7 Prodotto scalare di due vettori E’ una quantità scalare: r r r r s ≡ a • b ≡ a ⋅ b cosϑ in particolare: r r r r 2 a • a ≡ a 2 = a = a r r r u x2 = u y 2 = u z2 = 1 r r r r r u x • u y = u x • u z = u Vale la proprietà distributiva: r r r v a • (b + c ) = a • d ≡ a ⋅ d cosϑ d = a ⋅ (b c o s ϑ b + c c o s ϑ c ) = infatti: r a ⋅b cosϑ b + a ⋅ c cosϑ r r r r a •b + a • c U.Gasparini, Fisica I θab ab c ≡ θb b bcosθb θc b a 2 x y + a r • u z 2 y + a 2 z = 0 c θd a c cosθc dcosθd = bcosθb + c cosθc 8 Prodotto scalare in coordinate cartesiane Dalle proprietà precedenti, è facile ricavare l’ espressione del prodotto scalare in funzione delle coordinate cartesiane dei vettori : r r a • b = (a r = a xbxu 2 x x r u x + a + a x b y y r u r u r r + a z u z ) • (b x u y x r • u y x y + ....... + b y r u y y’ =0 =1 r + bzuz ) = r r a • b = a x bx + a y b y + a z bz θab b a x x’ Per a = b, si ritrova il caso particolare: r r a ⋅ a = a x2 + a 2 y + a z2 = a 2 Si noti che, come il modulo di un vettore, anche il prodotto scalare di due vettori e’ invariante per un cambiamento di sistema di coordinate (x,y,z) →(x’,y’,z’) r r a ⋅ b = a x b x + a y b y + a z b z = a x 'b x ' + a y 'b y ' + a z 'b z ' ( mentre, ovviamente: a x ≠ a x ' , a y ≠ a y' , a z ≠ a z ' , b x ≠ b x ' ,... ) 9 Prodotto vettoriale di due vettori E’ un vettore: c c = a × b θ Modulo: r c = b a r r a ⋅ b s in θ Direzione: perpendicolare al piano individuato da a e b Verso: definito dalla “regola della mano destra” (o “della vite destrogira”) Valgono le proprietà : - anti-commutativa : - distributiva: U.Gasparini, Fisica I c r r r r a × b = − (b × a ) r r r r r r r a × (b + c ) = a × b + a × c b a ⇒ Prodotto vettoriale in coordinate cartesiane r r a × a = 0 uz = ux × uy r r r u x × u y = uz r r r u x × uz = − u y uy π/2 r r r ux u y × uz = u x Espressione del prodotto vettoriale in funzione delle coordinate cartesiane : r r r r r r r r a × b = ( a x u x + a y u y + a z u z ) × (b x u x + b y u y + b z u z ) = r r r r = (a x u x × b x u x ) + (a x u x × b y u y ) + ...... = = ax by ( ux × uy ) = ax by uz =0 r r r r r a × b = (a ybz − a zb y )u x − (a xbz − a zbx )u y + (a xb y − a ybx )u z In forma “matriciale”: U.Gasparini, Fisica I r v a × b = r u a b x r u x a x b y y r u z y a z b z 11 Derivata di un vettore V(t) Il vettore ∆V “variazione di V(t) nel tempo ∆t” e’definito dalla operazione di somma di vettori (regola del parallelogramma): ∆V(t) V(t) V( t +∆t) ≡ V(t) + ∆V Il vettore ∆V puo’ essere diviso per la quantita’ scalare ∆t : r r r ∆V V (t + ∆ t ) − V (t ) = ∆t ∆t Il limite di questa espressione per ∆t→0 costituisce la derivata del vettore V(t): dV(t) dV dt U.Gasparini, Fisica I ≡ lim ∆t→ 0 r ∆V ∆t V(t) V( t +dt) ≡ V(t) + dV Regole di derivazione Si dimostra che, analogamente a quanto avviene per le derivate di funzioni scalari, valgono le seguenti proprieta’: - per la derivata del prodotto di una funzione scalare f(t) per una funzione r r vettoriale V(t): r d f ( t )V ( t ) df ( t ) d V (t ) [ dt ]= dt V (t ) + f (t ) dt - per la derivata del prodotto scalare di due funzioni vettoriali a(t) e b(t) : [ ] r r r r r d a (t ) ⋅ b (t ) d a (t ) r d b (t ) = ⋅ b (t ) + a (t ) ⋅ dt dt dt - per la derivata del prodotto vettoriale di due funzioni vettoriali a(t) e b(t) : [ ] r r r r r r d a (t ) × b (t ) d a (t ) d b (t ) = × b (t ) + a (t ) × dt dt dt U.Gasparini, Fisica I 13 Espressione della derivata di un vettore in funzione delle sue componenti Applicando le proprieta’ di derivazione precedenti alla scomposizione del vettore V(t) nelle sue componenti cartesiane: [ r r r r d v t u v t u v t u ( ) + ( ) + ( ) d V (t ) x x y y z z = dt dt dv y ( t ) r dv x ( t ) r dv z ( t ) r uy + ux + uz dt dt dt ]= (si noti che i versori ux, uy, uz sono vettori costanti, per definizione) si ottiene che le componenti cartesiane del vettore dV(t)/dt sono le derivate delle funzioni vx(t), vy(t), vz(t), componenti del vettore V : r dV dt x U.Gasparini, Fisica I r dv x ( t ) dV , = dt dt = y dv r t ( ) dV y , dt dt = z dv z (t ) dt 14 Integrazione di una funzione vettoriale Si considera il vettore somma dei vettori V(t0), V(t1=t0+∆t), V(t2=t1+∆t), ecc…: V(t2) V(t3) V(t1) r S = V(t0) N ∑ i= 0 r V (ti ) ∆ t Il limite di questa sommatoria per ∆t che tende a zero (ossia dividendo in infiniti intervalli di tempo infinitesimi dt l’ intervallo di tempo finito [ to, tf ] ) costituisce l’ integrale del vettore V(t) nell’ intervallo di tempo considerato: t r ∫ V ( t ) dt ≡ f t0 U.Gasparini, Fisica I lim ∆t→ 0 r S = lim ∆t→ 0 N ∑ i =1 r V (ti ) ∆ t 15 Integrazione in funzione delle componenti del vettore V(t) In maniera analoga a quanto visto per l’ operazione di derivazione, si dimostra : t f ∫ t0 = r V ( t ) dt = [∫ v t ∫ [v f t0 x r ] ( t ) dt u x x ] r r r ( t ) u x + v y ( t ) u y + v z ( t ) u z dt = + [∫ v y r ] ( t ) dt u y + [∫ v z r ] ( t ) dt u z + ossia le componenti lungo x, y e z del vettore “integrale di V(t)” sono gli integrali delle funzioni componenti vx(t), vy(t), vz(t). U.Gasparini, Fisica I 16
© Copyright 2026 Paperzz