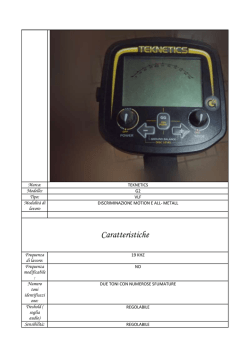
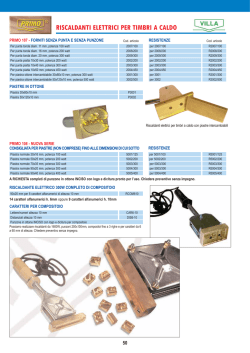
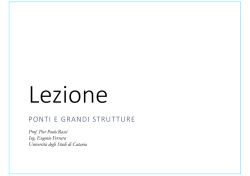
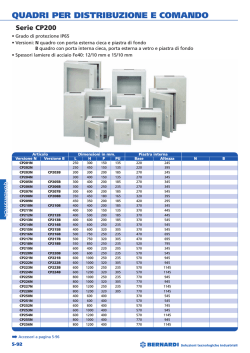
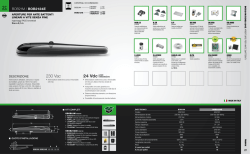
Piastre sottili Appunti del corso di Ponti e Grandi Strutture R. Giannini a.a. 2006/2007 Indice 1 Introduzione 2 2 Equazione delle piastre sottili 2.1 Definizione . . . . . . . . . . . . 2.2 Ipotesi . . . . . . . . . . . . . . . 2.3 Equazioni di equilibrio . . . . . . 2.4 Congruenza . . . . . . . . . . . . 2.5 Legge costitutiva del materiale . 2.6 Equazione indefinita delle piastre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 3 5 6 8 8 3 Condizioni ai bordi 10 4 Cambiamento di riferimento 11 5 Piastre circolari con carichi 5.1 Carico uniforme . . . . . . 5.1.1 Bordo appoggiato 5.1.2 Bordo incastrato . 5.2 Carico concentrato . . . . 5.2.1 Bordo appoggiato 5.2.2 Bordo incastrato . e . . . . . . vincoli simmetrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Piastra semplicemente appoggiata (soluzione 6.1 Carico uniforme . . . . . . . . . . . . . . . . . 6.2 Piastra su appoggi monolateri . . . . . . . . . 6.3 Carico concentrato . . . . . . . . . . . . . . . 7 Superfici di influenza delle piastre di . . . . . . . . . . . . 12 14 14 15 16 17 18 Navier) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 20 25 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 8 Piastre ortotrope 31 8.1 Legge costitutiva dei materiali ortotropi . . . . . . . . . . . . . . . . . . . . 32 8.2 Equazione delle piastre ortotrope . . . . . . . . . . . . . . . . . . . . . . . . 33 8.3 Ortotropia geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 9 Piastre sollecitate nel piano (lastre) 36 10 Instabilit` a delle lastre piane 38 10.1 Piastra appoggiata soggetta ad Nx = cost . . . . . . . . . . . . . . . . . . . 40 1 1 Introduzione La teoria delle piastre costituisce una estensione al campo bidimensionale di quella delle travi. Le travi sono elementi strutturali in cui una dimensione prevale sulle altre due in modo tale che `e possibile formularne un modello monodimensionale in cui tutte le grandezze sono funzioni di una sola variabile. Le piastre sono strutture estese spazialmente, in cui due dimensioni sono prevalenti sulla terza; per questi oggetti si pu` o sviluppare un modello bidimensionale, le cui grandezze sono funzioni delle due coordinate dei punti di una superficie. Se la superficie `e curva la struttura prende pi` u propriamente il nome di guscio, mentre il nome piastra `e riservato al caso in cui la superficie `e piana e la struttura `e sollecitata prevalentemente a flessione. Nei gusci si `e soliti distinguere due tipi di sollecitazioni: quelle contenute nel piano tangente alla superficie media sono dette sollecitazioni di membrana, le altre sono le componenti flessionali della sollecitazione. Generalmente sono presenti entrambi i tipi di sollecitazione, ma in alcuni casi uno dei due prevale sull’altro. Nelle strutture bidimensionali piane sollecitate da forze contenute nel piano (lastre), sono presenti solo sollecitazioni di membrana; se le forze agiscono perpendicolarmente al piano, le sollecitazioni sono prevalentemente flessionali, ed in tal caso si parla propriamente di piastre. Nelle strutture a superficie curva le sollecitazioni di membrana e quelle flessionali interagiscono tra loro e quindi devono essere analizzate simultaneamente; in quelle piane il problema si disaccoppia e lo stato di sollecitazione si pu` o determinare sovrapponendo la soluzione del problema di lastra a quella della piastra. Vi sono molti casi di strutture reali che si possono modellare come elementi bidimensionali: cupole, volte, serbatoi, sono esempi di strutture che possono rappresentarsi come gusci1 ; gli elementi di copertura piani, le solette degli impalcati dei ponti, i muri di sostegno e le spalle, le zattere per fondazioni estese, sono esempi di strutture modellabili come piastre. Lo studio delle strutture bidimensionali `e notevolmente pi` u complesso di quello delle travi; infatti, a differenza di queste ultime, tali strutture sono internamente iperstatiche; quindi le equazioni di equilibrio, indipendentemente dai vincoli esterni, non sono sufficienti a consentire la determinazione univoca del loro stato tensionale. In aggiunta le equazioni indefinite sono equazioni differenziali alle derivate parziali, un genere pi` u difficile da trattare delle equazioni ordinarie. Nel caso dei gusci poi il problema `e ulteriormente complicato dalla geometria curvilinea della superficie. Queste difficolt` a hanno in passato spinto molti autori a cercare delle soluzioni analitiche per numerosi casi particolari, per la forma della piastra, per la disposizione dei vincoli e per la distribuzione del carico; queste soluzioni, per lo pi` u limitate a casi di geometria semplice (circolare, rettangolare), sono poi state raccolte in tabelle che, a meno di qualche parametro (dimensione, intensit` a del carico, rigidezza) forniscono le grandezze pi` u significative (massima freccia, momenti in alcuni punti caratteristici); infatti le soluzioni sono in genere espresse sotto forma di serie il cui calcolo, in epoca pre-computer, risultava comunque piuttosto oneroso. La situazione `e notevolmente cambiata da quando le potenzialit`a e la diffusione dei calcolatori hanno reso possibile e di facile impiego il metodo degli elementi finiti, che consente, per le piastre come per altre tipologie strutturali, di analizzare situazioni anche 1 Fuori dal campo delle strutture civili le strutture a guscio trovano estesa applicazione nel campo meccanico (p.es. le scocche e le carrozzerie delle auto) e aeronautico (p.es. le fusoliere degli aerei). 2 P1 P h/2 Π h/2 P2 Figura 1: Definizione di piastra molto complesse per geometria, vincoli e carichi e di determinarne una soluzione numerica, approssimata ma quanto si vuole accurata. Gli elementi finiti di piastra, che includono anche le sollecitazioni di membrana, consentono di trattare strutture sia piane (lastre e piastre) sia curve (gusci) e quindi offrono uno strumento potente e flessibile che ha reso per lo pi` u obsolete le tabelle di cui si `e detto2 . Nel seguito verr` a esposta in modo succinto la teoria delle piastre sottili (per le quali `e possibile trascurare la deformabilit` a a taglio). L’equazione generale viene quindi specializzata al caso delle piastre circolari simmetriche, per le quali sono note soluzioni analitiche semplici. Successivamente sar` a trattata la soluzione di Navier per le piastre rettangolari appoggiate e si far` a cenno al problema delle superfici di influenza. Dopo aver succintamente esposto la teoria delle lastre piane, soggette alle componenti di membrana della sollecitazione, viene accennato il problema della stabilit` a delle lastre compresse. Anche se, come si `e detto, le tecniche agli elementi finiti hanno reso in certa misura superata l’utilit`a delle soluzioni tabellari di casi particolari, la determinazione e la relativa discussione di alcune soluzioni analitiche consente di trarre delle conclusioni di validit` a generale che `e importante conoscere e tenere presente, particolarmente durante la progettazione. 2 Equazione delle piastre sottili 2.1 Definizione Per piastra si intende un corpo in cui due dimensioni prevalgono sulla terza. Una piastra si pu` o pensare generata da una parte di piano Π (piano medio); in ogni punto P del piano si tracciano, in versi opposti, due segmenti perpendicolari al piano di lunghezza h/2. I punti P1 e P2 , estremi dei segmenti, determinano, al variare di P ∈ Π, due superfici (due piani se h `e costante) che delimitano la piastra. Il corpo inoltre si definisce piastra se `e caricato solo con forze perpendicolari al piano medio. 2.2 Ipotesi Indicando con x, y due assi tra loro ortogonali contenuti nel piano medio e con z un asse ortogonale a questo piano e rivolto verso il basso, si assume che σ z ≡ 0. Considerando un elementino di lati dxdy, sulla faccia di normale x agiranno le tensioni: a di lunghezza, σ x , τ xy , τ xz (vedi Fig. 2) a cui corrispondono le forze ed i momenti, per unit` 2 Queste tabelle, in molti casi, offrono ancora uno strumento utile per una rapida valutazione delle sollecitazioni, particolarmente nelle fasi di dimensionamento della struttura. 3 x τxy τyx y σy τxz τyz σx z Figura 2: Stato di tensione su di un elementino di piastra. risultant3 i: Nx = Vx = Vxy = mx = mxy = Z h/2 −h/2 Z h/2 −h/2 Z h/2 −h/2 Z h/2 −h/2 Z h/2 σ x dz (1a) τ xz dz (1b) τ xy dz (1c) σ x zdz (1d) τ xy zdz (1e) −h/2 Le risultanti di sollecitazione Nx e Vxy sono dette forze di membrana e sono prodotte da carichi agenti parallelamente al piano medio della piastra. Per le piastre caricate ortogonalmente al piano medio si assume che Nx = Vxy ≡ 0. Quindi le sole componenti non nulle sono Vx , mx , mxy . Analogamente, sulla faccia parallela all’asse y si avr` a che i termini Ny e Vyx sono nulli, mentre i rimanenti sono definiti da: Z h/2 Vy = τ yz dz (2a) −h/2 h/2 my = myx = Z −h/2 Z h/2 σ y zdz (2b) τ yx zdz (2c) −h/2 Per la reciprocit` a delle τ si ha ovviamente che myx = mxy . La piastra `e quindi caratterizzata da cinque componenti di sollecitazione: 3 Le risultanti Nx , Vx , ecc. hanno la dimensione di una forza divisa per una lunghezza. I momenti risultanti mx , my , mxy , hanno le dimensioni di un momento diviso per una lunghezza, cio`e di una forza. 4 Figura 3: Risultanti delle tensioni agenti sull’elemento di piastra. • due forze di taglio Vx e Vy • due momenti flettenti mx e my • un momento torcente mxy = myx Dal punto di vista cinematico si assume che i segmenti ortogonali al piano medio restino, dopo la deformazione, rettilinei; questo vuol dire che i punti lungo il segmento P1 P2 dopo la deformazione apparterranno ancora ad un segmento con punto medio P 0 , posizione di P dopo la deformazione. 2.3 Equazioni di equilibrio Partendo dalle ipotesi fatte prima, indicando con p la forza per unit` a di superficie applicata perpendicolarmente al piano medio, quindi in direzione dell’asse z, si deducono facilmente le seguenti equazioni di equilibrio indefinito: 1. Equilibrio delle forze nella direzione dell’asse z ¶ µ ¶ µ ∂Vy ∂Vx dx dy + −Vy + Vy + dy dx + pdxdy = 0 −Vx + Vx + ∂x ∂y 2. Equilibrio dei momenti attorno y ¶ µ ¶ µ ∂myx ∂mx dx dy + −myx + myx + dy dx − Vx dydx = 0 −mx + mx + ∂x ∂y 3. Equilibrio dei momenti attorno ad x ¶ µ ¶ µ ∂my ∂mxy dy dx + −mxy + mxy + dx dy − Vy dxdy = 0 −my + my + ∂y ∂x 5 (2d) (2e) (2f) P1 P φy uP φ y P1 ' y P’ x Figura 4: Spostamento di un punto della piastra Semplificando, da queste tre equazioni si ottiene il sistema ∂Vx ∂Vy + = −p ∂x ∂y ∂mx ∂myx + Vx = ∂x ∂y ∂mxy ∂my + Vy = ∂y ∂x (3a) (3b) (3c) Nelle (3), sostituendo la seconda e la terza nella prima, e ricordando che mxy = myx , si ha µ ¶ µ ¶ ∂mxy ∂ ∂mx ∂myx ∂ ∂my + + + = −p (4) ∂x ∂x ∂y ∂y ∂y ∂x ovvero 2.4 ∂ 2 my ∂ 2 mxy ∂ 2 mx + + 2 = −p ∂x2 ∂x∂y ∂y 2 (5) Congruenza Per l’ipotesi che i segmenti normali al piano medio rimangono rettilinei, lo spostamento o esprimere come somma dello di un punto Q, di ordinata z lungo il segmento P1 P2 , si pu` spostamento di P e della rotazione φ del segmento P1 P2 (Fig. 4): uQ = uP + φ ∧ nz (6) del¤punto del piano medio, φ `e il vettore rotazione, contenuto£ nel piano uP `e lo spostamento £ ¤ medio (φ = φx φy 0 ), n `e il vettore unitario normale al piano medio (n = 0 0 1 ) e ∧ indica il prodotto vettoriale. In forma scalare si ha uQx = uP x + φy z (7a) uQy = uP y − φx z (7b) uQz = uP z 6 (7c) Per l’assenza delle forze di membrana Nx , Ny , Vxy , si pu` o assumere che i punti del piano medio subiscano, nel piano stesso, al pi` u un moto rigido. Quindi, senza perdita di generalit`a si pu`o porre uP x = uP y = 0 in modo che le (7) divengono uQx = φy z (8a) uQy = −φx z (8b) uQz = w (8c) dove per brevit` a si `e posto uP z = w. Ovviamente φx , φy e w sono funzioni delle coordinate (x, y) del punto P . Dal campo degli spostamenti (8) si passa a quello delle deformazioni: ∂uQx ∂x ∂uQy ∂y ∂uQx ∂y ∂uQx ∂z ∂uQy ∂z εx = εy = γ xy = γ xz = γ yz = ∂φy z ∂x ∂φ = − xz ∂y µ ¶ ∂φy ∂uQy ∂φx + = − z ∂x ∂y ∂x ∂uQz ∂w + = φy + ∂x ∂x ∂uQz ∂w + = −φx + ∂y ∂y = (9a) (9b) (9c) (9d) (9e) Per le piastre sottili, ossia tali che h ¿ L (L indica la pi` u piccola dimensione della piastra nel piano xy), le deformazioni dovute al teglio γ xz e γ yz sono generalmente piccole ed i loro effetti trascurabili rispetto a quelli prodotti dalle deformazioni normali εx ed εy . L’ipotesi, che si aggiunge alle altre, valida per le piastre sottili, `e che la piastra sia infinitamente rigida a taglio, in modo che si possa assumere γ xz = γ yz = 0. Da queste ultime condizioini e dalle (9d,e) segue che ∂w ∂y ∂w = − ∂x φx = (10a) φy (10b) sostituendo le (10) nelle (9a-c) si ha ∂φy ∂2w z =− 2z ∂x ∂x ∂2w ∂φx z=− 2z = − ∂y ∂y µ ¶ ∂φy ∂φx ∂2w − z = z = −2 ∂y ∂x ∂x∂y εx = (11a) εy (11b) γ xy 7 (11c) 2.5 Legge costitutiva del materiale Se il materiale con cui `e realizzata la piastra ha un comportamento elastico isotropo, si hanno le relazioni seguenti, tra le tensioni e deformazioni non nulle: 1 (σ x − νσ y − νσ z ) (12a) εx = E 1 (σ y − νσ x − νσ z ) (12b) εy = E 1 (σ z − νσ x − νσ y ) (12c) εz = E τ xy 2 (1 + ν) (12d) = τ xy γ xy = G E dove E e ν sono il modulo di Young e il coefficiente di Poisson del materiale. Per ipotesi σ z = 0, quindi 1 εx = (σ x − νσ y ) (13a) E 1 (−νσ x + σ y ) (13b) εy = E Invertendo le (13) e l’ultima delle (12) si ottiene σx = σy = τ xy = 2.6 E (εx + νεy ) 1 − ν2 E (εy + νεx ) 1 − ν2 E γ 2 (1 + ν) xy (14a) (14b) (14c) Equazione indefinita delle piastre Sostituendo le (11) nelle equazioni costitutive (14) risulta µ 2 ¶ ∂ w E ∂2w σx = − +ν 2 z 1 − ν 2 ∂x2 ∂y µ 2 ¶ ∂ w E ∂ 2w +ν 2 z σy = − 1 − ν 2 ∂y 2 ∂x 2 ∂ w E τ xy = − z (1 + ν) ∂x∂y (15a) (15b) (15c) Sostituendo le (15) nelle (2) si ottengono le componenti di sollecitazione: µ 2 ¶ Z h/2 Z h/2 ∂ w −E ∂2w Nx = σ x dz = +ν 2 zdz = 0 1 − ν 2 ∂x2 ∂y −h/2 −h/2 µ 2 ¶ Z h/2 Z h/2 ∂ w −E ∂2w Ny = σ y dz = +ν 2 zdz = 0 1 − ν 2 ∂y2 ∂x −h/2 −h/2 Z h/2 −E mx = σ x zdz = 1 − ν2 −h/2 µ ∂2w ∂2w + ν ∂x2 ∂y2 8 ¶Z h/2 −h/2 (16a) (16b) z 2 dz = Eh3 =− 12 (1 − ν 2 ) µ ∂2w ∂2w + ν ∂x2 ∂y2 ¶ (16c) Z h/2 −E my = σ y zdz = 1 − ν2 −h/2 mxy = Z µ h/2 −h/2 τ xy zdz = − ∂2w ∂2w + ν ∂y 2 ∂x2 ¶Z ∂2w E (1 + ν) ∂x∂y Posto D= h/2 z 2 dz = −h/2 Z Eh3 =− 12 (1 − ν 2 ) h/2 −h/2 z 2 dz = − µ ∂ 2w ∂2w + ν ∂2y ∂x2 ¶ ∂2w Eh3 12 (1 + ν) ∂x∂y Eh3 12 (1 − ν 2 ) (16d) (16e) (17) (fattore di rigidezza della piastra) le relazioni precedenti si scrivono in forma sintetica ¶ µ 2 ∂ w ∂2w (18a) +ν 2 mx = −D ∂x2 ∂y µ 2 ¶ ∂ w ∂2w my = −D + ν (18b) ∂y2 ∂x2 ∂2w (18c) mxy = −D (1 − ν) ∂x∂y Sostituendo le (18) nelle (3b,c) si ottengono le relazioni tra taglio e deformazione: µ ¸ µ ¶ ¶ ∙ ∂ ∂ 2w ∂ 2w ∂ ∂2w ∂ ∂2w ∂2w = −D (19a) + ν 2 + (1 − ν) + Vx = −D ∂x ∂x2 ∂y ∂y ∂x∂y ∂x ∂x2 ∂y 2 ¸ µ ¶ ¶ ∙ µ 2 ∂ ∂2w ∂2w ∂ ∂2w ∂ ∂ w ∂2w Vy = −D = −D (19b) + ν 2 + (1 − ν) + ∂y ∂y2 ∂x ∂x ∂x∂y ∂y ∂x2 ∂y2 Infine, sostituendo le espressioni (18) nell’equazione di equilibrio (5): ∂ 2 my ∂ 2 mxy ∂ 2 mx + + 2 = −p ∂x2 ∂x∂y ∂y 2 si ottiene (supponendo D indipendente da x e y) µ 4 µ 4 ¶ ¶ ∂ w ∂ w ∂4w ∂ 4w ∂4w D + ν 2 2 + 2D (1 − ν) 2 2 + D +ν 2 2 =p ∂x4 ∂x ∂y ∂x ∂y ∂y 4 ∂y ∂x (5) (20) da cui, semplificando: ∂4w ∂4w ∂4w p + 2 + = 4 2 2 4 ∂x ∂x ∂y ∂y D (21) Questa `e l’equazione indefinita delle piastre sottili isotrope, che spesso viene scritta nella forma pi` u sintetica p (22) ∆∆w = D in cui ∆ indica l’operatore di Laplace (∆ = ∂2 ∂x2 9 + ∂2 ). ∂y2 3 Condizioni ai bordi La soluzione dell’equazione differenziale (21) non `e univoca senza che ne siano state precisate le condizioni sui bordi, che dipendono dalla natura dei vincoli. Per semplicit` a nel seguito si assumer`a che i bordi della piastra siano paralleli ad uno degli assi del riferimento x, y. 1. Bordo appoggiato. In questo caso gli abbassamenti dei punti della piastra lungo il bordo sono nulli (w = 0). Inoltre deve annullarsi il momento nella direzione normale al bordo. Se il bordo `e parallelo all’asse x, si ha my = 0, se `e parallelo ad y, mx = 0. 2. Bordo incastrato. Lungo il bordo sono nulli gli abbassamenti e le rotazioni in direzione normale al bordo. Quindi w = 0 e ∂w/∂y = 0 se il bordo `e parallelo ad x, ∂w/∂x = 0, se `e parallelo ad y. 3. Bordo con glifo. Sono nulle le forze di taglio e le rotazioni. Per la (19a) si ha ∂ Vx = −D ∂x µ ∂ 2w ∂ 2w + ∂x2 ∂y 2 ∂w =0 ∂y ¶ =0 se il bordo `e parallelo ad x. Nel caso di bordo parallelo ad y µ ¶ ∂ ∂2w ∂2w + Vy = −D =0 ∂y ∂x2 ∂y2 ∂w =0 ∂x (23a) (23b) (24a) (24b) 4. Bordo libero. In questo caso dovrebbero risultare nulle tutte le sollecitazioni sul bordo; nel caso di bordo parallelo ad y: mx = Vx = mxy = 0. Si hanno quindi tre condizioni, invece delle due utilizzate negli altri casi. In realt` a due di queste condizioni si possono condensare in una sola equazione. Infatti il momento torcente agente su di un tratto di lunghezza dy, mxy dy, `e equivalente ad una coppia di forze di taglio mxy di braccio dy, come `e mostrato nella Fig. 5. Due elementini adiacenti ∂m danno luogo quindi a due forze di segno opposto, mxy + ∂yxy dy e −mxy . Si ottiene ∂m quindi una forza di taglio complessiva ∂yxy dy che si somma alla forza Vx dy. La forza di taglio per unit` a di lunghezza, che si deve annullare sul bordo libero `e quindi Vx + ∂mxy =0 ∂y (25) Le condizioni al contorno per il bordo libero sono quindi: (a) Bordo parallelo ad y: mx = 0 ∂mxy =0 Vx + ∂y 10 (26a) (26b) ∂m ⎞ ⎛ ⎜⎜ mxy + xy dy ⎟⎟dy ∂y ⎠ ⎝ mxy dy y mxy + ∂mxy ∂y mxy dy dy Vx dy z dy Figura 5: Composizione tra momento torcente e taglio sul bordo libero della piastra. (b) Bordo parallelo ad x my = 0 ∂mxy Vy + =0 ∂x 4 (27a) (27b) Cambiamento di riferimento Le tensioni prodotte dalla flessione σ x , σ y e τ xy formano un sistema di tensioni piane. Le tensioni secondo un altro riferemento ortogonale ξ, η ruotato di ϕ rispetto al precedente, si ottengono facilmente applicando la regola generale di trasformazione dei tensori σ ξ = σ x cos2 ϕ + σ y sin2 ϕ + 2τ xy sin ϕ cos ϕ 2 2 σ η = σ x sin ϕ + σ y cos ϕ − 2τ xy sin ϕ cos ϕ (σ x − σ y ) sin 2ϕ + τ xy cos 2ϕ τ ξη = − 2 (28a) (28b) (28c) i rispettivi momenti si ottengono moltiplicando le tensioni per z ed integrando tra −h/2 e h/2. Quindi: mξ = mx cos2 ϕ + my sin2 ϕ + 2mxy sin ϕ cos ϕ 2 2 mη = mx sin ϕ + my cos ϕ − 2mxy sin ϕ cos ϕ mx − my sin 2ϕ + mxy cos 2ϕ mξη = − 2 (29a) (29b) (29c) In particolare le giaciture principali (mξη = 0) formano con gli assi x, y un angolo tan 2ϕ = 2mxy mx − my (30) Se mx = my = 0, risulta tan 2ϕ = ∞ e quindi ϕ = π/4. In tal caso mξ = −mη = mxy . 11 Vr+dVr mr +dmr dr mθ Vr p r r dθ (a) (b) Figura 6: Elemento di piastra circolare (a) ed equilibrio al taglio (b). 5 Piastre circolari con carichi e vincoli simmetrici Per le piastre circolari con condizioni di carico e di vincolo simmetriche `e conveniente utilizzare un sistema di coordinate polari r, θ, con origine nel centro della piastra. In questo caso, per ovvie considerazioni di simmetria, il momento torcente mrθ ed il taglio Vθ sono nulli, e le altre grandezze non dipendono da θ. Osservando il disegno di Fig. 6 (a), le equazioni di equilibrio dei momenti, si scrivono: Vr (r + dr) dθdr − mr rdθ + (mr + dmr ) (r + dr) dθ − mθ drdθ = 0 (31) da cui, semplificando e trascurando i termini infinitesimi di ordine superiore dmr mr mθ + − = −Vr dr r r (32) L’equazione di equilibrio delle forze in direzione dell’asse z pu`o essere espressa in termini finiti. Infatti, considerando una parte di piastra, circolare, con centro nell’origine e raggio r, l’equilibrio globale in direzione z, assumendo p positivo verso il basso, diviene (Fig. 6 (b)): Z Z Vr dC = C(r) pdA (33) A(r) dove il primo integrale `e esteso alla circonferenza di raggio r ed il secondo all’area del cerchio delimitato da C (r). Esplicitamente, tenendo conto che Vr e p non dipendono da θ, l’equazione precedente diviene Z r 2πrVr = 2π ζp (ζ) dζ (34) 0 pertanto Vr = 1 r Z r 0 12 ζp (ζ) dζ (35) ϕ ρθ r = cost θ = cost r Figura 7: Sostituendo la (35) nella (32) si elimina Vr e si ha dmr mr mθ 1 + − =− dr r r r Z r ζp (ζ) dζ (36) 0 Per le superfici con piccola curvatura si ha che le derivate seconde della funzione w (x, y) rispetto ad x ed y approssimano le curvature delle sezioni di w con i piani coordinati xz e yz. Indicando con ρx e ρy i corrispondenti raggi di curvatura, le equazioni (18) si possono scrivere ¶ µ 1 1 (37a) +ν mx = −D ρx ρy µ ¶ 1 1 (37b) my = −D ν + ρx ρy Passando a coordinate polari, poich`e le linee di equazione r = cost e θ = cost sono in ogni punto ortogonali, potremo porre: ¶ µ 1 1 mr = −D (38a) +ν ρr ρθ ¶ µ 1 1 mθ = −D ν + (38b) ρr ρθ Ora si ha 1 d2 w ' ρr dr2 ρθ = r sin ϕ come si deduce dalla Fig. 7. Poich´e ϕ ¿ 1, sin ϕ ' tan ϕ = 1 1 dw = ρθ r dr Sostituendo la prima delle (39) e la (40) nelle (38) risulta ¶ µ 2 d w 1 dw +ν mr = −D dr2 r dr ¶ µ 2 d w 1 dw mθ = −D ν 2 + dr r dr 13 (39) dw dr : (40) (41a) (41b) Infine sostituendo le (41) nell’equazione di equilibrio (36) si ottiene l’equazione delle piastre circolari simmetriche: Z r 1 1 dw d3 w 1 d2 w = + − 2 ζp (ζ) dζ (42) dr3 r dr2 r dr Dr 0 Questa equazione si pu` o, in alternativa, scrivere ∙ µ ¶¸ Z r d 1 d dw 1 r = ζp (ζ) dζ dr r dr dr Dr 0 (43) La soluzione della (43) si ottiene pertanto mediante successive integrazioni. 5.1 Carico uniforme Se p non dipende da r, la (43) diviene ∙ µ ¶¸ d 1 d dw 1 pr r = dr r dr dr 2D quindi, per successive integrazioni: µ ¶ µ ¶ dw 1 d 3 r = pr + C1 r dr dr 4D µ ¶ dw 1 r4 pr3 r2 r C2 1 = p + C1 + C2 = + C1 + dr D 16 2 r 16D 2 r (44) (45) (46) pr4 r2 + C1 + C2 log (r) + C3 (47) 64D 4 I valori delle tre costanti si determinano in base alle condizioni al contorno. In tutti i casi, per evitare discontinuit` a della deformazione occorre che, per r = 0, si abbia dw/dr = 0. Quindi dalla (46) segue che C2 = 0. Sostituendo la (47) nelle (41) si hanno le espressioni esplicite dei momenti w= 5.1.1 pr2 1+ν (3 + ν) − C1 D 16 2 pr2 1+ν (1 + 3ν) − C1 D = − 16 2 mr = − (48a) mθ (48b) Bordo appoggiato Per r = R (raggio della piastra) si ha w = 0 e mr = 0. Da quest’ultima condizione, e tenendo contodella prima delle (48) si ottiene C1 = − pR2 3 + ν 8D 1 + ν (49) e quindi mr = mθ = ∙ ³ r ´2 ¸ pR2 (3 + ν) 1 − 16 R ∙ ³ r ´2 ¸ 2 pR (3 + ν) − (1 + 3ν) 16 R 14 (50a) (50b) 0 0.1 0.2 momento radiale momento circonf. 0 0.2 0.4 0.6 0.8 r/R Figura 8: Momento radiale (linea rossa) e circonferenziale (linea blu), a meno di pR2 , su di una piastra circolare con carico uniforme, appoggiata sul bordo. Sostituendo la (49) nella (47) e ponendo w(R) = 0, si ottiene l’espressione della costante C3 : pR4 5 + ν (51) 64D 1 + ν quindi, sostituendo anche questa espressione in quella di w, si giunge all’equazione della deformata: ∙ ³ r ´2 ¸ ∙ (5 + ν) ³ r ´2 ¸ pR4 1− − (52) w (r) = 64D R (1 + ν) R C3 = Al centro della piastra (r = 0) pR4 5 + ν 64D 1 + ν pR2 mr (0) = mθ (0) = (3 + ν) 16 w (0) = Sul bordo mθ (R) = 5.1.2 pR2 (1 − ν) 8 (53a) (53b) (54) Bordo incastrato In questo caso le condizioni di vincolo sono w (R) = w0 (R) = 0. Dalla (46), per r = R si trova immediatamente pR2 (55) C1 = − 8D quindi, sostituendo questo risultato nella (47) e annullando lo spostamento si ottiene C3 = pR4 64D (56) Sostituendo anche l’espressione di C3 nella (47) si ottiene l’espressione della deformata: ∙ ³ r ´2 ¸2 pR4 1− w (r) = 64D R 15 (57) 0.15 Mom. radiale Mom. circonf. 0.05 0.05 0 0.2 0.4 0.6 0.8 r/R Figura 9: Momento radiale (linea rossa) e circonferenziale (linea blu), a meno di pR2 , su di una piastra circolare con carico uniforme, incastrata sul bordo. Infine, sostituendo la (57) nelle (41), si ottengono le espressioni dei momenti: ∙ ¸ ³ r ´2 pR2 1+ν − (3 + ν) mr = 16 R ¸ ∙ ³ r ´2 pR2 mθ = (1 + 3ν) 1+ν − 16 R (58a) (58b) Al centro della piastra, per r = 0, si ha pR4 64D pR2 mr (0) = mθ (0) = (1 + ν) 16 w (0) = (59a) (59b) Sul bordo (r = R) pR2 8 pR2 mθ (R) = −ν 8 mr (R) = − 5.2 (60a) (60b) Carico concentrato Se la piastra `e soggetta ad un carico P concentrato applicato al centro, dall’equazione (43) si deduce ∙ µ ¶¸ dw 1 d 1 d r =− P (61) dr r dr dr 2πDr Quindi, integrando tre volte questa espressione, si ottiene la funzione w: w (r) = − r2 P r2 (log r − 1) + C1 + C2 log r + C3 8πD 4 16 (62) La cui derivata `e dw Pr r C2 =− (2 log r − 1) + C1 + (63) dr 8πD 2 r La condizione che w0 resti finito (anzi si annulli) per r → 0 richiede che C2 = 0. Di conseguenza r2 P r2 (log r − 1) + C1 + C3 (64) w (r) = − 8πD 4 dw Pr r =− (2 log r − 1) + C1 (65) dr 8πD 2 Sostituendo l’espressione di w nelle (48) risulta C1 D P [2 (1 + ν) log r + 1 − ν] + (1 + ν) 8π 2 P C1 D [2 (1 + ν) log r − 1 + ν] + (1 + ν) 8π 2 mr = mθ = 5.2.1 (66a) (66b) Bordo appoggiato In questo caso, per r = R si ha mr = 0. Quindi µ ¶ 1−ν P 2 log R + C1 = − 4πD 1+ν µ ¶ P 3+ν r 2 w= r 2 log − + C3 16πD R 1+ν (67) (68) Dalla condizione w (R) = 0 segue che C3 = e quindi P R2 3 + ν 16πD 1 + ν ∙ ³ ´ µ ³ r ´2 ¶ 3 + ν ¸ r 2 r P R2 2 log + 1 − w= 16πD R R R 1+ν ³r´ P (1 + ν) log 4π ∙ ³ ´R ¸ r 1−ν P (1 + ν) mθ = log − 4π R 1+ν mr = Abbassamento massimo w (0) = P R2 3 + ν 16πD 1 + ν 17 (69) (70) (71a) (71b) (72) 0 0.1 0.2 Mom. radiale Mom. circonf. 0.3 0.4 0 0.2 0.4 0.6 0.8 r/R Figura 10: Momenti (a meno di P ) radiale (linea rossa) e circonferenziale (linea blu) in una piastra circolare appoggiata e caricata al centro con una forza concentrata. 5.2.2 Bordo incastrato Sul bordo si annulla la derivata prima di w. Dalla (65) segue C1 = −P (2 log R − 1) 4πD (73) Sostituendo nella (65) e ponendo w (R) = 0 e risolvendo l’equazione si ottiene l’altra costante P R2 C3 = (74) 16πD da cui si ricava ∙ ³ r ´2 ³ ´¸ ³r´ P R2 −1 (75) 1+ 2 log w (r) = 16πD R R P 4π P = − 4π mr = − mθ L’abbassamento massimo `e h ³ r ´i 1 + (1 + ν) log R h ³ r ´i ν + (1 + ν) log R P R2 16πD Al centro entrambi i momenti divergono; sul bordo (r = R) si ha w (0) = mr = − P 4π mθ = − 18 νP 4π (76a) (76b) (77) (78) 0.1 0 0.1 Mom. radiale Mom. circonf. 0.2 0 0.2 0.4 0.6 0.8 r/R Figura 11: Momenti (a meno di P ) radiale (linea rossa) e circonferenziale (linea blu) in una piastra circolare incastrata e caricata al centro con una forza concentrata. 6 Piastra semplicemente appoggiata (soluzione di Navier) Si esamina ora il caso di una piastra rettangolare appoggiata lungo tutto il contorno. In questo caso le condizioni sul bordo divengono semplicemente ¯ ∂ 2 w ¯¯ w (0, y) = w(Lx , y) = 0 =0 (79a) ∂x2 ¯x=0,Lx ¯ ∂ 2 w ¯¯ w (x, 0) = w(x, Ly ) = 0 =0 (79b) ∂y 2 ¯ y=±Ly /2 Queste condizioni sono evidentemente soddisfatte dalle funzioni ¶ µ ¶ µ y x sin kπ j, k = 1, 2, 3, . . . sin jπ Lx Ly (80) Quindi `e possibile porre w (x, y) = ∞ ∞ X X j=1 k=1 ¶ µ ¶ µ y x sin kπ cjk sin jπ Lx Ly (81) dove cjk sono costanti che devono essere determinate in modo da soddisfare l’equazione (21). Sostituendo la (81) nella (21) risulta ∂4w ∂4w ∂ 4w +2 2 2 + = 4 ∂x ∂x ∂y ∂y 4 "µ ¶ µ ¶2 µ ¶2 µ ¶4 # µ ¶ µ ¶ ∞ ∞ X X j k k j 4 x y 4 π +2 + sin kπ = cjk sin jπ Lx Lx Ly Ly Lx Ly j=1 k=1 "µ ¶ ¶ µ ¶ µ ¶2 #2 µ n n X 2 X j y p k x 4 (82) sin kπ = + cjk sin jπ π Lx Ly Lx Ly D j=1 k=1 19 Moltiplicando entrambi i membri della (82) per sin(qπx/Lx ) sin(rπy/Ly ), q ed r interi, integrando x tra 0 e Lx , y tra 0 e Ly , e tenendo conto che Z Lx 0 si ottiene "µ 4 π cqr q Lx ¶2 µ ¶ µ ¶ ½ x x 0 se j 6= q sin jπ sin qπ dx = Lx /2 se j = q Lx Lx r Ly ¶2 #2 Lx Ly = 4 cqr = 4L3x π 4 Ly R Lx R Ly + µ per cui risulta 6.1 0 0 Z Lx 0 p D Z Ly 0 µ ¶ µ ¶ p x y sin qπ sin rπ dxdy D Lx Ly ³ ´ ³ ´ sin qπ Lxx sin rπ Lyy dxdy ∙ ³ ´2 ¸2 x 2 r2 q + L Ly (83) (84) (85) Carico uniforme Se p = cost,allora l’integrale a secondo membro nella (85) si calcola facilmente µ ¶ µ ¶ p x y sin qπ sin rπ dxdy = D Lx Ly 0 0 ( ¶ Z Ly ¶ µ µ Z 0 se q od r sono pari p Lx p x y dx dy = sin qπ sin rπ 4Lx Ly se q ed r sono dispari D 0 Lx Ly D 0 qrπ 2 Z Lx Z Ly Sostituendo la (86) nella (85) si ha ⎧ ⎪ ⎨ 0 4Lx Ly 4pL3x qrπ 2 cqr = = ⎪ ⎩ π4 DLy q2 + Lx 2 r2 2 Ly (86) per q o r pari 16pL4x π6 D 1 2 2 Lx 2 q + L r2 qr per q e r dispari (87) y Sostituendo l’espressione dei coefficienti cqr nella (81) si ottiene il campo degli spostamenti del piano medi w i h i h y x ∞ ∞ X sin (2k − 1) π 4 sin (2j − 1) π X Lx Ly 16pLx (88) w= h i2 Dπ 6 2 2 j=1 k=1 (2j − 1) + α2 (2k − 1) (2j − 1) (2k − 1) avendo posto α= Lx Ly (89) Determinato il campo degli spostamenti si calcolano le sollecitazioni sostituendo la (88) nelle (18): h i h i h i 2 2 (2k − 1)2 sin (2j − 1) π x sin (2k − 1) π y ∞ ∞ (2j − 1) 2 + να Lx Ly 16pLx X X mx = h i2 4 π j=1 k=1 (2j − 1)2 + α2 (2k − 1)2 (2j − 1) (2k − 1) (90a) 20 Figura 12: Spostamento w del piano medio di una piastra quadrata con carico uniforme (a meno di pL4x /D). my = h i h i h i ν (2j − 1)2 + α2 (2k − 1)2 sin (2j − 1) π Lxx sin (2k − 1) π Lyy h i2 2 2 2 (2j − 1) + α (2k − 1) (2j − 1) (2k − 1) (90b) i h i h y x ∞ ∞ X X cos (2j − 1) π Lx cos (2k − 1) π Ly 16pL2x =− (1 − ν) α (90c) h i2 π4 2 2 2 j=1 k=1 (2j − 1) + α (2k − 1) ∞ ∞ 16pL2x X X π4 j=1 k=1 mxy Infine, utilizzando le (19), si determinano anche le sollecitazioni di taglio: i h i h µ 2 ¶ ∞ cos (2j − 1) π x sin (2k − 1) π y ∞ X 2 X Lx Ly p16Lx ∂ ∂ w ∂ w h i Vx = −D = + 2 2 3 2 2 ∂x ∂x ∂y π (2j − 1) + α2 (2k − 1) (2k − 1) j=1 k=1 (91a) i h i h y x cos (2k − 1) π 2 2 α sin (2j − 1) π Lx Ly ∂ ∂ w ∂ w p16Lx h i Vy = −D + = 2 2 3 2 2 ∂x ∂x ∂y π (2j − 1) + α2 (2k − 1) (2j − 1) j=1 k=1 (91b) In Fig. 12 `e rappresentata la funzione wD/pL4x , relativa ad una piastra quadrata soggetta a carico uniforme. Nel grafico in Fig. 13 invece `e rappresentato l’abbassamento del 5 pL4 punto centrale rapportato a quello di una trave appoggiata ( 384 EJ ) di ugual rigidezza µ ¶ ∞ ∞ X X 4 4 pL x e luce ed ugualmente caricata (ovvero pL D = EJ ), in funzione del rapporto α = Lx /Ly , o osservare come per una piatra quadrata (α =³1), l’abbassamendove Ly ≥ Lx . Si pu` ´ 4 5 pLx to della piastra sia circa un terzo di quello della trave (wmax = 0.312 384 D ), ma per α < 0.2 l’abbassamento al centro della piastra praticamente coincide con quello della trave di ugual rigidezza; inoltre, gi` a per α = 0.5 (ossia per Ly = 2Lx ), il precedente rapporto `e circa 0.778. Questo dimostra, come sar` a ancora esposto in seguito, che l’“effetto piastra” si perde rapidamente quando α < 0.5. Nella Fig. 14 `e rappresentata la superficie del grafico di mx per una piastra quadrata caricata unformemente (ν = 0.25). Nella Fig. 15 `e invece mostrato il rapporto tra i 21 Figura 13: Abbassamento al centro di una piastra rettangolare con carico uniforme, rapportato a quello di una trave di uguale rigidezza in funzione del rapporto α = Lx /Ly . Figura 14: Grafico del momento mx relativo ad una piastra quadrata con carico uniforme (ν = 0.25). momenti mx ed my al centro della piatra ed il momento massimo di trave appoggiata 1 2 8 pLx . Appare evidente che per, piastre quadrate, si ha mx = my e questo momento `e sensibilmente minore di quello di una corrispondente trave o soletta (circa 0.368 per ν = 0.25); tuttavia al diminuire del rapporto α = Lx /Ly , il momento relativo alla luce minore mx tende rapidamente al valore del momento di trave appoggiata; infatti per α ≤ 0.2 questo rapporto `e praticamente 1, e gi` a per α = 0.5 (ossia per Ly = 2Lx ) il momento di piastra `e l’80% di quello della trave. Questo conferma quanto detto prima, circa il fatto che il comportamento a piatra si evidenzia solo per geometrie in cui il rapporto tra i lati non differisce troppo dall’unit` a. Il momento nella direzione della luce maggiore my , invece diminuisce al diminuire di α. Per α → 0, si ha my = νmx . Nella Fig. 16 `e mostrato il diagramma del momento my lungo la sezione mediana di una piastra allungata (Ly = 10Lx ); `e evidente che il momento `e quasi ovunque uniforme (my ' νmx max ) ma aumenta in prossimit`a dei bordi, dove si risente dell’influenza dei vincoli. Nella Fig. 17 `e rappresentato l’andamento del momento torcente in una piastra qua- 22 Figura 15: Rapporti tra il momento mx (linea blu) ed my (linea rossa) al centro di una piastra rettangolare appoggiata ai bordi ed il momento massimo di una trave di luce uguale a quella minore della piastra (pL2x /8) al variare del rapporto α = Lx /Ly (ν = 0.25). ¢ ¡ Figura 16: Diagramma del momento my L2x /p lungo la linea mediana di una piastra con α = Lx /Ly = 0.1 (ν = 0.25). drata; questo momento `e nullo al centro, come era prevedibile in base a considerazioni di simmetria, e raggiunge il valore massimo in corrispondenza degli spigoli della piastra. Per ν = 0.25 questo momento vale |mxy | = 0.0348pL2x , ovvero circa il 75% del momento massimo in campata. In corrispondenza dello spigolo inoltre si ha mx = my = 0. Quindi, applicando la (30), si trova che i momenti flettenti massimi agiscono secondo direzioni a 45◦ rispetto agli assi e, per le (29), valgono, a meno del segno, mxy . Llungo i bordi il momento `e nullo, ma in corrispondenza degli spigoli sono presenti dei momenti agenti nelle direazioni delle diagonali che, in una piastra soggetta a forze agenti verso il basso, tendono gli strati superiori della piastra nelle direzioni delle diagonali e li comprimono nelle direzioni ortogonali. Nella Fig. 18 sono mostrate le linee di livello dei valori massimi e minimi (con segno) del momento agente in ogni punto della piastra. Come si vde, sui bordi della piastra questi momenti non sono nulli e raggiungono i valori estremi in corrispondenza dei vertici. L’andamento del taglio (Vx ) `e mostrato nella Fig. 19, sempre per una piastra quadrata. Il taglio `e pressoch´e nullo al centro e cresce rapidamente in prossimit`a degli appoggi; tuttavia si annulla in corrispondenza degli spigoli. Ma la presenza del momento torcente 23 f3 Figura 17: Momento torcente mxy in una piastra quadrata caricata uniformemente. Figura 18: Momenti (massimi e minimi) in una piastra appoggiata a lati uguali. 24 f Figura 19: Taglio Vx (a meno di pLx ) in una piastra quadrata. y x mxy R Figura 20: Reazione vincolare sugli spigoli. fa nascere negli spigoli una forza concentrata rivolta verso il basso R = 2mxy (vedi Fig. 20). Le reazioni vincolari lungo i bordi di una piastra quadrata sono distribuite come in Fig. 21 ma, oltre a queste forze distribuite, si deve tener conto della forza concentrata nei vertici R che genera una reazione di verso opposto alle reazioni distribuite. 6.2 Piastra su appoggi monolateri La reazione R si pu` o sviluppare solamente se il vincolo esercitato lungo il bordo `e bilatero, ossia `e in grado di produrre reazioni di entrambi i segni. Se l’appoggio `e di tipo monolatero e pu`o sviluppare solamente reazioni verso l’alto la forza R non pu`o nascere e quindi la soluzione dell’equazione (21) cambia sensibilmente. Dato il diverso comportamento del vincolo in trazione e compressione il problema diviene non-lineare. Qualitativamente, quello che avviene `e che gli spigoli, non trattenuti dalla reazione R, si sollevano, e questo impedisce l’insorgere dei momenti flettenti lungo le diagonali e quindi dei momenti torcenti che raggiungono i valori estremi negli spigoli; in corrispondenza aumenta il momento in mezzeria, ma in misura modesta. La soluzione del caso di piastra vincolata con appoggio monolatero `e illustrata nella figura 22 ottenuta mediante un programma ad elementi finiti. 25 0.4 0.2 0 0.2 0.4 0.6 0.8 Figura 21: Reazioni su uno de bordi di una piastra quadrata. 4E-006 0.25 3E-006 spostamento reazione 0.2 0.15 0.1 2E-006 1E-006 0.05 0 0 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 Figura 22: Reazioni vincolari e spostamenti del bordo di una piastra quadrata su appoggi monolateri. 6.3 Carico concentrato Utilizzando la funzione δ di Dirac4 , la funzione p di un carico concentrato P applicato nel punto di coordinate ξ, η si scrive p (x, y) = P δ (x − ξ) δ (y − η) (92) Sostituendo la (92) nella (85) e tenendo conto delle propriet`a della funzione δ, l’espressione 4 La funzione impulso ⎧ di Dirac `e una funzione della variabile reale x che verifica le seguenti condizioni: se y < a o y > b ⎨ 0 b f (y) se a < y < b f (x) δ (x − y) dx = a ⎩ 1 f (y) se y = 0 o y = b 2 dove f (x) `e una arbitraria funzione continua in y. 26 Figura 23: Deformazione del piano medio di una piastra quadrata a seguito di un carico al centro (sinistra) e nel punto ξ = η = 0.25L. dei coefficienti dello sviluppo in serie (81) diviene cqr = P D R Lx R Ly 0 0 ´ ³ ´ ³ δ (x − ξ) δ (y − η) sin qπ Lxx sin rπ Lyy dxdy = ∙³ ´ ³ ´2 ¸2 2 Lx Ly q r 4 π + Ly Lx 4 ´ ³ ´ ³ ξ η sin rπ sin qπ Lx Ly P ∙³ ´ ³ ´2 ¸2 2 D Lx Ly π 4 Lqx + Lry 4 La funzione degli spostamenti del piano medio risulta quindi: ´ ³ ´ ³ ´ ³ ´ ³ η y x ∞ sin jπ ξ ∞ X sin kπ sin jπ sin kπ 2 X Lx Ly Lx Ly P Lx 4 w= 2 2 2 2 Dα π 4 [j + α k ] (93) (94) j=1 k=1 Nella figura 23 sono rappresentati gli spostamenti del piano medio della piastra, per due posizioni della forza concentrata: ξ = 0.5Lx , η = 0.5Ly (figura a sinistra), ξ = 0.25Lx , η = 0.25Ly (figura a destra). Sostituendo la (94) nelle (18) si ottengono le espressioni dei momenti ¶ µ ¶ µ ¶ µ ¶ µ ∞ ∞ η x y 4 X X j 2 + να2 k2 ξ sin kπ sin jπ sin kπ sin jπ mx = P 2 π α Lx Ly Lx Ly [j 2 + α2 k 2 ]2 j=1 k=1 (95a) ¶ µ ¶ µ ¶ µ ¶ µ ∞ ∞ X 2 2 2 X νj + α k η x y 4 ξ sin kπ sin jπ sin kπ my = P 2 sin jπ 2 2 2 2 π α Lx Ly Lx Ly j=1 k=1 [j + α k ] (95b) 27 Figura 24: Grafico del momento mx (per P = 1) in una piastra quadrata soggetta ad un carico concentrato applicato nel centro. mxy = ¶ µ ¶ µ ¶ µ ¶ µ ∞ ∞ jk η x y ξ 4 (1 − ν) X X sin kπ cos jπ cos kπ sin jπ −P π2 Lx Ly Lx Ly [j 2 + α2 k2 ]2 j=1 k=1 (95c) Quindi, applicando le (19) si determinano le espressioni di Vx e Vy : µ ¶ µ ¶ µ ¶ µ ¶ ∞ ∞ ξ j η x y P 1 XX sin jπ Vx = sin kπ cos jπ sin kπ Lx πα [j 2 + α2 k 2 ] Lx Ly Lx Ly j=1 k=1 (96a) µ ¶ µ ¶ µ ¶ µ ¶ ∞ X ∞ X ξ k η x y P 1 sin jπ Vy = sin kπ sin jπ cos kπ (96b) Lx π [j 2 + α2 k 2 ] Lx Ly Lx Ly j=1 k=1 Nelle figure 24, 25 e 26 sono rappresentati i grafici del momento di flessione mx , della torsione mxy e del taglio Vx nel caso di una piastra a lati uguali con carico applicato al centro. Sia mx (ed my ) sia Vx (e Vy ) divergono nel punto di applicazione della forza. I valori rappresentati dipendono dal numero di termini effettivamente inclusi nel calcolo numerico della serie. 7 Superfici di influenza delle piastre Il concetto di superficie di influenza generalizza quello di linea di influenza. Dato un punto Q in una piastra, la superficie di influenza della grandezza X in Q (X (P, Q)) `e la superficie di equazione X (P ), ove X (P ) `e il valore che la grandezza assume in Q quando un carico unitario `e applicato in P. 28 Figura 25: Grafico del momento mxy (P = 1) di una piastra quadrata soggetta ad un carico concentrato applicato al centro. Figura 26: Grafico del taglio Vx (a meno di P/Lx ) di una piastra quadrata soggetta ad un carico concentrato applicato al centro. 29 Figura 27: A sinistra: grafico dei momenti torcenti prodotti da un carico unitario applicato nel punto (0.05Lx , 0.05Ly ). A destra: superficie di influenza del momento torcente nel punto (0.05Lx , 0.05Ly ). Piastra quadrata, ν = 0.25. Per il teorema di reciprocit`a, se X `e lo spostamento, allora la superficie di influenza dello spostamento del punto Q coincide con la deformata della superficie media prodotta da un carico unitario in Q. Infatti se w (P, Q) indica lo spostamento in Q prodotto dal carico unitario in P e w (Q, P ) quello prodotto in P dal carico unitario in Q, per il teorema di reciprocit`a 1w (P, Q) = 1w (Q, P ) (97) Questa intercambiabilit` a tra le coordinate x, y del punto della superficie elastica e le coordinate ξ, η del punto di applicazione del carico appare evidente dall’equazione (94) che fornisce la deformazione del piano medio di una piastra appoggiata e soggetta ad un carico concentrato. Una analoga simmetria tra le coordinate di P e Q `e mostrata dalle (95a,b) che esprimono i momenti flettenti di una piastra appoggiata soggetta ad un carico concentrato. Il grafico del momento (mx o my ) prodotto da un carico unitario in P (ξ, η) coincide quindi con la superficie di influenza della stessa gandezza relativa al punto P . Una tale simmetria non vi `e per il momento torcente mxy . In Fig. 27 sono rappresentati i momenti torcenti prodotti da un carico applicato in prossimit` a dello spigolo (0, 0) (grafico di sinistra) e la ` evidente che i due grafici superficie di influenza della stessa grandezza nello stesso punto. E sono molto diversi. Infatti un carico prossimo allo spigolo produce un campo di sollecitazioni quasi ovunque nullo, che tuttavia diverge nel punto di applicazione della forza; la superficie di influenza invece si estende in tutta la piastra e diverge nel punto di controllo. Se il punto fosse posto sull’appoggio, il momento indotto dal carico applicato in tale punto sarebbe ovviamente ovunque nullo; al contrario la superficie di influenza sarebbe simile a quella della Fig. 27. Analogamente, le (96), fissati x, y, al variare di ξ, η forniscono le superfici di influenza del taglio. In Fig. 28 `e rappresentata la superficie di influenza della reazione al centro 30 Figura 28: Superficie di influenza del taglio Vx nel punto (0, Ly /2), in una piastra quadrata semplicemente appoggiata. dell’appoggio del lato parallelo ad y. Ovviamente il corrispondente grafico del taglio per un carico sull’appoggio sarebbe stato nullo ovunque. 8 Piastre ortotrope L’acciaio ed il calcestruzzo hanno un comportamento isotropo, anche se, nelle strutture in cemento armato, le armature possono introdurre un certo grado di anistropia. Esistono tuttavia diversi materiali per i quali non si pu`o usare il modello di comportamento isotropo; tra questi in particolare si notano i materiali fibrosi, sia naturali, come il legno, sia artificiali, come le resine fibro-rinforzate, che hanno un comportamento spiccatamente anisotropo o, pi` u precisamente, ortotropo5 . Nelle piastre tuttavia una frequente causa di ortotropia `e data dalla diversa geomeria della piastra secondo due direzioni ortogonali, come nel caso rappresentato in Fig. 29. In questo caso, pur essendo il materiale isotropo, il comportamento globale della piastra pu`o essere assimilato a quello di una a sezione piena di spessore uniforme, ma realizzata con un materiale di natura anisotropa. 5 I materiali ortotropi si caratterizzano per il fatto di possedere tre piani di simmetria ortogonali. In direzione ortogonale a ciascun piano il comportamento `e simmetrico (cio`e non cambia se si esegue una rotazione di 180 gradi intorno ad uno degli assi di un riferimento che ha questi come piani coordinati). Nei materiali fibrosi una direzione di ortotropia `e determinata da quella delle fibre, mentre le altre sono ortogonali a questa. 31 8.1 Legge costitutiva dei materiali ortotropi Per un materiale iperelastico ortotropo, la relazione tra tensioni e deformazioni ha la forma: ⎤⎡ ⎤ ⎡ ⎤ ⎡ εx σx G11 G12 G13 0 0 0 ⎥ ⎢ σy ⎥ ⎢ εy ⎥ ⎢G12 G22 G23 0 0 0 ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ εz ⎥ ⎢G13 G23 G33 0 0 0 ⎥ ⎥ ⎢ σz ⎥ ⎢ ⎥=⎢ (98) ⎥ ⎥ ⎢γ yz ⎥ ⎢ 0 0 ⎥⎢ 0 0 G44 0 ⎢τ yz ⎥ ⎢ ⎥ ⎢ ⎣γ ⎦ ⎣ 0 0 ⎦ ⎣τ xz ⎦ 0 0 0 G55 xz γ xy τ xy 0 0 0 0 0 G66 Nel caso delle piastre, essendo per ipotesi σ z = 0, e γ xz = γ yz = 0, la relazione costitutiva si pu` o ridurre alle sole tre componenti, sia della tensione sia della deformazione, contenute nel piano x, y e l’equazione precedente diviene ⎤⎡ ⎤ ⎡ ⎤ ⎡ 1 −ν xy 0 σx εx Ex Ey ⎥⎣ ⎦ −ν 1 ⎣εy ⎦ = ⎢ σy (99) 0 ⎣ Exyx ⎦ Ey 1 γ τ 0 0 G dove, per la simmetria della matrice (99): ν yx ν xy = Ey Ex (100) Per le tensioni piane di un materiale ortotropo si hanno cinque costanti elastiche (Ex , Ey , ν xy , ν yx e G) ma solo quattro sono indipendenti, in virt` u della (100). Invertendo la (99) si ottiene la legge costitutiva tra deformazioni e tensioni: ⎤⎡ ⎤ ⎡ ⎤ ⎡ Ex ν xy Ex 0 σx εx 1−ν xy ν yx 1−ν xy ν yx ⎥⎣ ⎦ ν yx Ey Ey ⎣σ y ⎦ = ⎢ (101) ⎣ 1−ν xy ν yx 1−ν xy ν yx 0 ⎦ εy τ γ 0 0 G In altra forma Ex (εx + ν xy εy ) 1 − ν xy ν yx Ey (εy + ν yx εx ) σy = 1 − ν xy ν yx σx = τ = Gγ (102a) (102b) (102c) Poich´e anche la (101) `e simmetrica, si ha ν yx Ey ν xy Ex = 1 − ν xy ν yx 1 − ν xy ν yx come segue immediatamente dalla (100). 32 (103) 8.2 Equazione delle piastre ortotrope Sostituendo le (11) nelle (102) si ottiene: σx σy τ µ 2 ¶ ∂ 2w ∂ w −Ex = + ν xy 2 z 1 − ν xy ν yx ∂x2 ∂y µ 2 ¶ −Ey ∂ w ∂ 2w = + ν yx 2 z 1 − ν xy ν yx ∂y 2 ∂x 2 ∂ w z = −2G ∂x∂y (104a) (104b) (104c) Quindi, sostituendo queste ultime nelle (2), si ottengono le risultanti delle sollecitazioni in funzione delle derivate di w: µ 2 ¶ Z h/2 ∂ w ∂ 2 w h3 −Ex mx = = σ x zdz = + ν xy 2 1 − ν xy ν yx ∂x2 ∂y 12 −h/2 µ 2 ¶ ∂ w ∂2w + ν xy 2 (105a) − Dx ∂x2 ∂y Z h/2 −Ey σ y zdz = my = 1 − ν xy ν yx −h/2 µ ∂2w ∂ 2w + ν yx ∂y 2 ∂x2 ¶ h3 = 12 − Dy mxy = Z h/2 −h/2 τ zdz = −2G µ ∂2w ∂2w + ν yx ∂y 2 ∂x2 ∂2w ∂ 2 w h3 = −C ∂x∂y 12 ∂x∂y ¶ (105b) (105c) in cui le costanti di rigidezza Dx , Dy e C dipendono dalle costanti elastiche Ex , Ey , ν xy , ν yx e G mediante le relazioni Dx = Ex h3 12 (1 − ν xy ν yx ) Dy = Ey h3 12 (1 − ν xy ν yx ) C= Gh3 6 (106) Ovviamente se Ex = Ey = E, ν xy = ν yx = ν e G = E/2 (1 + ν), le (105) coincidono con le (16), valide per i materiali isotropi. Sostituendo le (105) nella equazione di equilibrio (5) risulta: µ 4 ¶ µ 4 ¶ ∂4w ∂4w ∂ w ∂4w ∂ w (107) + ν xy 2 2 + 2C 2 2 + Dy + ν yx 2 2 = p Dx ∂x4 ∂x ∂y ∂x ∂y ∂y 4 ∂y ∂x Tenendo presente che, per le (103), Dx ν xy = Dy ν yx , la precedente si semplifica nella Dx ∂4w ∂4w ∂4w + D + 2 (C + ν D ) =p y xy x ∂x4 ∂y 4 ∂x2 ∂y2 (108) ∂4w ∂ 4w ∂ 4w + 2H + D =p y ∂x4 ∂x2 ∂y 2 ∂y 4 (109) H = C + ν xy Dx = C + ν yx Dy (110) che si pu` o riscrivere Dx in cui 33 8.3 Ortotropia geometrica Quando l’ortotropia dipende dalla natura del materiale le costanti Dx , Dy e H si determinano a partire dalle caratteristiche del materiale, che possono essere misurate sperimentalmente mediante apposite prove. Quando, al contrario, il materiale `e isotropo e l’anisotropia dipende dalla diversa geometria di due sezioni ortogonali della piastra, come nel caso mostrato in Fig. 29, le relazioni costitutive sono ancora quelle del materiale elastico espresse dalle (15), ma nel calcolo della risultante si dovr` a tener conto delle specifiche caratteristiche geometriche della piastra. Per una piastra come quella in Fig. 29, simmetrica rispetto al piano medio, le relazioni cinematiche (11) sono ancora valide. Tuttavia il contributo alla tensione normale σ y del 2 termine legato alla contrazione ortogonale ν ∂∂xw2 si manifesta solo all’interno dello spessore h della piastra, non negli irrigidimenti. Tenendo conto di ci` o, applicando le (15), si avr` a dunque Z µ ¶ Z h/2 ∂2w ∂2w +ν 2 z 2 dz = ∂x2 ∂y −h/2 µ 2 ¶ µ 2 ¶ ∂ w ∂ w −Eh3 ∂2w ∂2w + ν 2 = −Dx +ν 2 (111a) 12 (1 − ν 2 ) ∂x2 ∂y ∂x2 ∂y h/2 −E σ x zdA = mx = (1 − ν 2 ) −h/2 # "µ ¶ Z h/2 2 w Z h1 /2 ∂2w −E ∂2w ∂ σ y zdA = +ν 2 s z 2 dz + 2 2 b z 2 dz = s (1 − ν 2 ) ∂y 2 ∂x ∂y Ax −h/2 h/2 ∙ µ ¶ ¸ µ 2 ¶ b 3 ∂2w −E b ∂ w νEh3 ∂ 2 w Dx ∂ 2 w 3 h 1− + h1 − + = −Dy −ν 12 (1 − ν 2 ) s s ∂y 2 12 (1 − ν 2 ) ∂x2 ∂y 2 Dy ∂x2 (111b) 1 my = sy Z Per il momento torcente, trascurando il contributo degli irrigidimenti, si pu` o assumere mxy = mxy Z h/2 ∂2w E = τ xy zdz = − (1 + ν) ∂x∂y −h/2 − Z h/2 z 2 dz = h/2 Eh3 ∂2w ∂ 2w = −Dx (1 − ν) 12 (1 + ν) ∂x∂y ∂x∂y Sostituendo le (111) nella (5) si ha µ 4 ¶ ∂4w ∂4w ∂ w ∂ 4w ∂4w Dx + 2D + ν (1 − ν) + D + νD =p x y x ∂x4 ∂x2 ∂y 2 ∂x2 ∂y 2 ∂y4 ∂y 2 ∂x2 ovvero Dx ∂4w ∂4w ∂4w + 2D + D =p x y ∂x4 ∂x2 ∂y 2 ∂y 4 dove Eh3 Dx = 12 (1 − ν 2 ) Dy = Dx ( b 1+ s "µ h1 h ¶3 (111c) (112) (113) #) −1 (114) La (113) coincide con la (109) se si pone H = Dx 34 (115) x h h1 y z b s Figura 29: Piastra irrigidita simmetricamente x h y h1 z b s Figura 30: Piastra irrigidita in modo asimmetrico. I coefficienti di un materiale ortotropo che dia luogo a caratteristiche equivalenti a quelle della piastra irrigidita si ottengono confrontando le (111) con le (105), e si trova che ( #) "µ ¶ Dy h1 3 b Dx ν xy = ν Ey = E =E 1+ −1 ν yx = ν (116) Ex = E Dx s h Dy Inoltre, poch´e C = H − ν xy Dx , tenendo conto delle (106) e della (115) risulta G= 6 6Dx E (H − νDx ) = 3 (1 − ν) = h3 h 2 (1 + ν) (117) Un caso pi` u complesso `e quello illustrato in Fig. 30, che rappresenta una piastra irrigidita in modo asimmetrico rispetto al piano medio. Il problema `e complicato dal fatto che i baricentri delle due sezioni ortogonali non giacciono pi` u sullo stesso piano. Una formulazione approssimata si pu` o ancora ottenere rappresentando la piastra come ortotropa. Con tale approssimazione, se si assume ν = 0, si ottengono i seguenti valori per i coefficienti 35 della piastra[1]: Dx = Eh3 ∙ ½ ³ ´3 ¸¾ b 12 1 − s 1 − hh1 Dy = EJ s H=C= Eh3 Kt + 12 s (118) in cui J `e il momento d’inerzia della sezione a T (tratteggiata in Fig. 30) e Kt `e la rigidezza torsionale di un irrigidimento. Per il modello di materiale equivalente, avendo posto ν = 0, si avr` a ν xy = ν yx = 0 e quindi µ ¶ 12Kt E 12J 6C E ∙ Ey = E 3 1+ 3 (119) G= 3 = Ex = ½ ³ ´3 ¸¾ sh h 2 sh E b h 1 − s 1 − h1 9 Piastre sollecitate nel piano (lastre) Nelle piastre le equazioni relative alle componenti di membrana della sollecitazione sono, come `e stato detto all’inizio, disaccoppiate da quelle della flessione. Si possono quindi risolvere separatamente due problemi, uno relativo alla parte flessionale della sollecitazione, trattato nei paragrafi precedenti, l’altro relativo alle componenti membranali che comprendono due termini di sforzo normale Nx , Ny ed uno di taglio Vxy . Dalla Fig. 31 si deducono facilmente le due seguenti equazioni di equilibrio ¶ ¶ µ µ ∂Vyx ∂Nx dx dy − Vyx dx + Vyx + dy dx + px dxdy = 0 (120a) −Nx dy + Nx + ∂x ∂y ¶ ¶ µ µ ∂Ny ∂Vxy dy dx − Vxy dy + Vxy + dx dy + py dxdy = 0 −Ny dx + Ny + (120b) ∂y ∂x da cui, semplificando ∂Nx ∂Vyx + + px = 0 ∂x ∂y ∂Vxy ∂Ny + + py = 0 ∂y ∂x (121a) (121b) Poich´e Vxy = Vyx , come segue dalla nota propriet`a delle tensioni tangenziali e come si pu`o anche direttamente verificare dall’equilibrio dei momenti intorno all’asse z, le (121) formano un sistema di due equazioni in tre incognite, per cui le sole condizioni di equilibrio sono insufficienti a rendere il problema determinato6 . Indicando con u, v gli spostamenti dei punti del piano medio nelle direzioni x ed y rispettivamente, le condizioni di cogruenza si scrivono semplicemente: εx = ∂u ∂x εy = ∂v ∂y γ xy = ∂u ∂v + ∂y ∂x (122) 6 Nel caso dei gusci a superficie curva le componenti di membrana generano anche una componente in direzione z. Alle due equazioni precedenti se ne aggiunge quindi una terza che rende il problema staticamente determinato, nell’ipotesi che siano nulli i termini flessionali (soluzione di membrana). Questa soluzione tuttavia non `e di solito compatibile con le condizioni al contorno, che si possono soddisfare solo introducendo anche i termini flessionali. 36 Ny Vyx Vxy Nx dx py Vyx + y Ny + ∂N y ∂y ∂Vyx ∂y x dy px Vxy + dy ∂Vxy ∂x Nx + dx ∂N x dx ∂x dy Figura 31: Forze e componenti di sollecitazione agenti nel piano medio della piastra. Da queste si deduce facilmente che ∂ 2 γ xy ∂ 2 εx ∂ 2 εy + = ∂y2 ∂x2 ∂x∂y (123) (equazione di congruenza in forma implicita). Sostituendo nella (123) le equazioni della legge costitutiva del materiale (13)e (12d), risulta ∂ 2 τ xy ∂2 ∂2 (σ − νσ ) + (σ − νσ ) = 2 (1 + ν) x y y x ∂y 2 ∂x2 ∂x∂y (124) Poich´e le tensioni sono uniformi lungo lo spessore, le sollecitazioni risultanti Nx , Ny e Vxy hanno espressione Ny = hσ y Vxy = hτ xy (125a) Nx = hσ x Da queste e dalle (124) si ottiene l’equazione di congruenza espressa in termini delle sollecitazioni Nx , Ny e Vxy : µ 2 ¶ ∂ 2 Vxy ∂ Nx ∂ 2 Ny ∂ 2 Nx ∂ 2 Ny (126) + − ν + = 2 (1 + ν) ∂y2 ∂x2 ∂x2 ∂y 2 ∂x∂y Ma, dalle equazioni di equilibrio (121), se px e py non dipendono da x ed y, si deduce che ∂ 2 Vxy ∂ 2 Nx = − ∂x2 ∂x∂y 2 ∂ Ny ∂ 2 Vxy = − ∂y2 ∂y∂x che sommate danno ∂ 2 Vxy ∂ 2 Nx ∂ 2 Ny + = −2 ∂x2 ∂y 2 ∂x∂y (127a) (127b) (128) Sostituendo questa nella (126), risulta ¶ µ 2 ∂ 2 Nx ∂ 2 Ny ∂ Nx ∂ 2 Ny + = − + ∂y 2 ∂x2 ∂x2 ∂y 2 37 (129) ovvero µ ∂2 ∂2 + ∂x2 ∂y 2 ¶ (Nx + Ny ) = 0 (130) Le equazioni di equilibrio (121) risultano soddisfatte se le sollecitazioni si ottengono da una funzione potenziale Φ (x, y), detta funzione di Airy: Nx = ∂2Φ − px x − py y ∂y2 Ny = ∂2Φ − px x − py y ∂x2 Vxy = − ∂2Φ ∂x∂y (131) avendo supposto che px e py siano uniformi nella piastra. Infatti, sostituendo le (131) nelle (121) si ha ∂Nx ∂Vyx ∂3Φ ∂3Φ + + px = − p − + px ≡ 0 x ∂x ∂y ∂x∂y 2 ∂x∂y 2 ∂Vxy ∂Ny ∂3Φ ∂3Φ + + py = + py ≡ 0 − p − y ∂y ∂x ∂y∂x2 ∂x2 ∂y (132a) (132b) La funzione di Airy deve tuttavia soddisfare anche le condizioni di congruenza, espresse dalla (130). Quindi sostituendo in questa le (131) si ottiene ¸ ¶∙ 2 µ 2 ∂ Φ ∂2Φ ∂2 ∂ + + − 2 (px x + py y) = 0 (133) ∂x2 ∂y 2 ∂y 2 ∂x2 Tenendo conto che, se px e py sono costanti, le derivate seconde del termine tra parentesi tonde sono nulle, la precedente si semplifica in µ 2 ¶µ 2 ¶ ∂ ∂ Φ ∂2Φ ∂2 ∂4Φ ∂4Φ ∂4Φ + + + 2 + =0 (134) = ∂x2 ∂y 2 ∂x2 ∂y2 ∂x4 ∂x2 ∂y 2 ∂y 4 nota come equazione di Airy. Questa equazione, analoga a quella delle piastre per il caso p = 0, associata ad opportune condizioni al contorno, consente di determinare il campo delle sollecitazioni in una lastra caricata nel piano, quando le forze di volume px e py sono uniformi7 . Si deve notare che le condizioni al contorno in termini della funzione di Airy Φ si possono esprimere con relativa facilit` a solo per le condizioni di bordo libero, su cui sono assegnate le forze; molto pi` u complicato `e esprimere le condizioni per i bordi vincolati, che si esprimono in termini di spostamenti assegnati ai punti della frontiera. 10 Instabilit` a delle lastre piane Nei precedenti paragrafi `e stato pi` u volte detto che le equazioni relative agli sforzi di membrana e quelle degli sforzi flessionali sono, per le piastre piane, disaccoppiate. Questo `e vero nell’ambito di una teoria del primo ordine, in cui le equazioni di equilibrio si scrivono con riferimento alla struttura indeformata, ritenendo che il cambiamento di configurazione prodotto dalla deformazione abbia effetti trascurabili sulle condizioni di equilibrio. Come `e noto, per esempio dal caso della trave di Eulero, questa ipotesi non `e sempre accettabile; il termine correttivo dovuto ai termini del secondo ordine rende la funzione dell’energia 7 Questa condizione non `e molto restrittiva, poich´e generalmente la forza di volume coincide con il peso che, in una lastra omogenea e di spessore uniforme, `e, ovviamente, anch’esso uniforme. 38 ϕx Vyx Nx Ny ϕy Vxy x y ϕy + ∂ϕ y ∂y Ny + dy ∂N y ∂y dy Vyx + ∂V yx ∂y Vxy + dy ∂Vxy ∂x ϕx + dx Nx + ∂ϕ x dx ∂x ∂N x dx ∂x Figura 32: Superficie media della piastra deformata. potenziale elastica non pi` u quadratica, e questo non consente di garantire che l’equilibrio sia sempre stabile; infatti, per certi valori dei parametri e delle forze agenti, l’equilibrio diviene instabile e comunque, per valori minori di quelli critici, le deformazioni possono risultare molto pi` u grandi di quelle ottenute dalla soluzione del primo ordine. Nel caso delle piastre, per effetto della deformazione, la superficie media si incurva e questo produce un accoppiamento tra le sollecitazioni membranali e quelle flessionali. Osservando la Fig. 32 si osserva che le proiezioni delle sollecitazioni Nx , Ny e Vxy , tangenti alla superficie media, hanno una componente non nulla nella direzione dell’asse z. Tale componente risulta: ¶µ ¶¸ µ ∙ ∂Nx ∂ϕx dx ϕx + dx dy+ −Nx ϕx + Nx + ∂x ∂x ∙ ¶µ ¶¸ µ ∂ϕy ∂Ny −Ny ϕy + Ny + ϕy + dy dy dx+ ∂y ∂y ¶µ ¶¸ µ ∙ ∂ϕy ∂Vxy dx ϕy + dx dy+ −Vxy ϕy + Vxy + ∂x ∂x ¶µ ¶¸ µ ∙ ∂Vyx ∂ϕx dy ϕx + dy dx (135) −Vyx ϕx + Vyx + ∂y ∂y dove ϕx e ϕy sono i seni degli angoli formati dai vettori Nx ed Ny con gli assi x ed y, rispettivamente. Semplificando e trascurando i termini di ordine superiore al secondo la (135), dopo aver diviso tutti i termini per dxdy, diviene: ∂ϕy ∂ϕy ∂Ny ∂Vxy ∂Vyx ∂ϕ ∂ϕ ∂Nx ϕx + Nx x + ϕy + Ny + ϕy + Vxy + ϕx + Vyx x = ∂x ∂x ∂y ∂y ∂x ∂x ∂y ∂y ¶ ¶ ¶ µ µ µ ∂ϕy ∂ϕy ∂ϕx ∂Vxy ∂Ny ∂Nx ∂Vyx ∂ϕx + ϕx + + ϕy + Nx + Ny + Vxy + ∂x ∂y ∂y ∂x ∂x ∂y ∂x ∂y (136) 39 Nx Nx Figura 33: Se nel piano medio della piastra non agiscono forze di volume (px = py = 0), allora, per le equazioni di equilibrio (121), le quantit` a comprese tra le prime due parentesi tonde nella (136) sono nulle. Quindi poich´e per piccole deformazioni `e possibile confondere il seno con la tangente dello stesso angolo, si potr` a porre ϕx ' ∂w ∂x ϕy ' ∂w ∂y (137) e la (136) diviene ∂2w ∂2w ∂2w (138) + N + 2V y xy ∂x2 ∂y 2 ∂x∂y La (138) rappresenta una forza per unit` a di superficie diretta secondo l’asse z; pertanto la si pu`o interpretare come un ulteriore carico che si aggiunge a quello p applicato dall’esterno. L’equazione flessionale della piastra (21) diviene quindi: ∙ ¸ ∂4w ∂2w ∂2w ∂ 2w ∂4w ∂4w 1 p + Nx 2 + Ny 2 + 2Vxy (139) +2 2 2 + = ∂x4 ∂x ∂y ∂y4 D ∂x ∂y ∂x∂y Nx ovvero, portando i termini che dipendono da w a primo membro µ ¶ p ∂2w ∂ 2w ∂ 2w ∂4w ∂4w ∂4w 1 Nx 2 + Ny 2 + 2Vxy = +2 2 2 + − 4 4 ∂x ∂x ∂y ∂y D ∂x ∂y ∂x∂y D (140) Si `e detto che la deformazione della superficie media della piastra accoppia le equazioni relative alla parte flessionale ed a quella di membrana, e questo `e infatti mostrato dalla (140) dove compaiono sia la deformazione flessionale w, sia le forze di membrana Nx , Ny e Vxy . Tuttavia se le deformazioni sono piccole per cui ϕx ' ∂w/∂x ¿ 1, si ha cos ϕx = p ¡ ¢ 2 1 − sin2 ϕx ' 1− ϕ2x = 1+o ∂w ∂x ; pertanto, a meno di infinitesimi di ordine superiore, le equazioni di equilibrio (121) scritte con riferimento al piano medio non deformato, restano valide. Dunque, risolvendo il problema degli sforzi di membrana nella lastra, per esempio mediante l’equazione di Airy, i valori di Nx , Ny e Vxy risultano noti e possono essere sostituiti nell’equazione (140), in cui w resta la sola funzione incognita. 10.1 Piastra appoggiata soggetta ad Nx = cost Una piastra sottoposta ad una sollecitazione uniforme Nx lungo i bordi paralleli ad y, in ogni punto avr` a una sollecitazione di membrana Nx = cost mentre Ny = Vxy = 0. L’equazione (140) diviene pertanto ∂4w ∂4w ∂ 4 w Nx ∂ 2 w p + 2 + − = 4 2 2 4 2 ∂x ∂x ∂y ∂y D ∂x D 40 (141) La soluzione della (141) si pu` o ottenere mediante il doppio sviluppo in serie di Fourier (81) utilizzato per la soluzione dell’analogo problema del primo ordine. Sostituendo la (81) nella (141) si ottiene ∞ ∞ X X j=1 k=1 cjk "µ jπ Lx ¶4 +2 µ ¶ µ ¶ jπ 2 kπ 2 + Lx Ly µ ¶4 µ ¶ # ¶ µ ¶ µ kπ y p Nx jπ 2 x sin kπ = + sin jπ Ly D Lx Lx Ly D (142) Da questa equazione, tenedo conto delle propriet`a di ortogonalit` a delle funzioni trigonometriche, si ottiene, operando come nel §6: ³ ´ ³ ´ R Lx R Ly y x p sin jπ sin kπ Lx Ly dxdy 0 0 4 (143) cjk = ∙³ ´ ³ ´2 ³ ´2 ¸2 2 Dπ 4 Lx Ly j j Nx k + Ly + π2 D Lx Lx ³ ´2 La (143) differisce dalla (85) per via del termine πN2 xD Ljx presente al denominatore. Se Nx `e postivo (lastra tesa) questo termine riduce i coefficienti cjk dello sviluppo della funzione w. In sostanza la piastra risulta pi` u rigida quanto maggiore `e Nx . Se Nx `e negativo (lastra compressa), il denominatore nella (143) diminuisce al crescere di |Nx | e per 2 |Nx (j, k)| = π D µ Lx j ¶2 "µ j Lx ¶2 ¶ #2 k 2 + = Ly ¶2 µ ¶2 µ π 2 D jLy k2 k 2 Lx π2 D j + α + = 2 (144) L2y Lx jLy Ly α j µ il denominatore si annulla ed il relativo coefficiente diviene illimitato, ci` o significa che la deformazione w diviene illimitata (α = Lx /Ly ). Il valore critico di |Nx (j.k)| `e ovviamente il minimo. Poich`e |Nx | cresce con k, il valore critico si ottiene per k = 1, quindi ¶ µ α 2 π2 D j + (145) Ncr (j, α) = 2 Ly α j Uguagliando a zero la derivata della (145) rispetto ad α si ha ¶µ ¶ µ α j j 1 + − 2+ =0 a j α j (146) la cui unica soluzione reale e positiva `e α = j; quindi il minimo valore di Ncr si ottiene per α = j e vale π2 D (147) Ncr = 4 2 Ly indipendente da j. Le curve di Ncr (j, α) sono rappresentate in Fig. 34 per diversi valori di j. Le curve raggiungono tutte il valore minimo (147) quando α = j. 41 10 j=1 j=2 j=3 j=4 j=5 8 6 4 0 1 2 3 4 5 6 Lx/Ly Figura 34: Carico critico ( a meno di π 2 D/L2y ) per la piastra rettangolare con uniforme sollecitazione in funzione di α = Lx /Ly e per valori crescenti di j (1, 2, 3, 4, 5) Per α 6= j si noti che due curve successive si intersecano quando j α j+1 α + = + α j α j+1 ovvero per α= p j (j + 1) (148) (149) Quindi, come mostra la Fig.p34, per j < α < j + 1 il carico critico p si ottiene dalla (145) con j = int (α), se j ≤ α < j (j + 1), e con j = int (α) + 1, se j (j + 1) < α ≤ j + 1. La Fig. 34 mostra inoltre che, per α & 3, il valore del carico critico si discosta poco da quello fornito dalla (147). Quindi per le piastre con rapporto tra i lati abbastanza grande il carico critico diviene indipendente dal valore di α. Quando il valore di Nx si avvicina a quello critico, il coefficiente cj1 della serie (81) tende all’infinito; la funzione w risulta quindi dominata da questo termine, mentre tutti gli altri divengono, al confronto trascurabili. La forma della funzione w `e dunque data dal termine ¶ µ ¶ µ πy πx sin (150) sin j Lx Ly dove j `e l’intero che approssima α, secondo quanto specificato prima. La (150) `e rappresentata in due modi nella Fig. 35. Come si vede, se α `e intero, la piastra si suddivide in α quadrati e sbanda secondo le configurazioni mostrate nella figure. Se α non `e intero la piastra si suddivide inpn rettangoli, dove n `e minore o maggiore di α, secondo che α `e minore o maggiore di j (j + 1) (j intero). Quanto detto sopra `e valido se il numeratore dei coefficienti cjk `e non nullo per ogni j, k, altrimenti la discussione deve essere ristretta ai termini non nulli. Ad esempio, nel caso delle piastre con carico uniforme si `e visto che il doppio integrale a numeratore nella (143) `e nullo se j o k sono pari (questa condizione `e valida per ogni schema di carico simmetrico rispetto alla mezzeria della piastra). In tale caso i valori di j pari nella (145) non hanno significato e la discussione andrebbe quindi ristretta ai soli valori di j dispari. Quindi le forme antisimmetriche di imbozzamento, come quella per j = 2 mostrata nella Fig. 35, non sono in questo caso possibili, anche se α = 2. Il punto di intersezione tra √ due p curve possibili risulta allora α = j (j + 2). Per α compreso tra 1 e 3 questo punto `e 3. 42 f f f Figura 35: Deformata della piastra per Nx ' Ncr e j = 1, 2, 3. Riferimenti bibliografici [1] S. Timoshenko, S. Woinowsky-Krieger: Theory of Plates and Shells. McGraw-Hill. 1964 [2] J.N. Reddy: Theory and Analysis of Elastic Plates and Shells. CRC Press Inc. 2006 [3] S. Timoshenko, J. Goodier: Theory of Elasticity. McGraw-Hill. 1970 [4] C.L. Dym: Stability Theory and Applications to Structural Mechanics. Dover Publications. 2002 43
© Copyright 2026 Paperzz