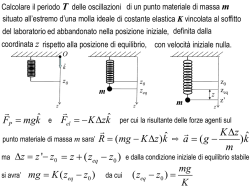
Descrizione vettoriale dell’esperimento di risonanza magnetica 1 Moto di un momento magnetico in campo magnetico. Un momento magnetico (associato ad un momento angolare) in un campo magnetico è soggetto ad una forza che tende a riallinearlo al Campo. Questa forza (momento torcente) fa variare il momento angolare: Γ = µ ∧ B0 = z dJ dt B0 Il momento magneticoè proporzionale al momento angolare (lo spin): µ = γJ Γ µ y x Se si moltiplicano ambo i membri per γ dµ = µ ∧ γB0 dt 2 Per risolvere questa equazione, è utile considerare un sistema di riferimento rotante. z z’ x,y,z “sistema di laboratorio” (assi fissi) x’,y’,z’ “sistema rotante” (assi rotanti) y’ y x ω z’ coincide con z x’ e y’ ruotano con velocità ω x’ Si può ricavare che, per un vettore v generico, la trasformazioni nel sistema d’assi rotanti implica: dv δv = +ω ∧ v dt δt Variazione di v nel sistema di laboratorio Variazione di v nel sistema rotante 3 Usando la precedente relazione nel caso dell’equazione sul momento magnetico dµ = µ ∧ γB dt Nel sistema di laboratorio δµ + ω ∧ µ = µ ∧ γB δt Cioe’, esplicitando la derivata di µ rispetto al sistema rotante: δµ = µ ∧ (ω + γB) δt Questa equazione è equivalente alla equazione nel sistema fisso, purchè si sostituisca il campo magnetico B con un campo effettivo Beff=(B+ω/γ) Beff = ω +B γ 4 La soluzione della equazione del moto del momento magnetico nel sistema rotante è semplice se si assume Beff=0, cioè se ω = −γB In questa situazione δµ =0 δt Cioè µ è statico sistema rotante. Rispetto al sistema fisso quindi µ ruota alla velocità ω=-γB Questa frequenza è detta Frequenza di Larmor ω0 = −γB Che è pari alla frequenza di risonanza tra due stati stati di spin con ∆m=±1 γ ν0 = − B 2π 5 Si determina il moto di µ anche risolvendo l’equazione delle tre componenti del momento magnetico (notare che Bx=By=0, Bz≠0): dµ = µ ∧ γB z dt Le cui soluzioni sono: dµ x dt = γµ y B z dµ y = −γµ x B z dt dµ z dt = 0 µ z ( t ) = µ z ( 0) µ x = µ x (0) cos(ω0t ) µ = µ (0) sin(ω t ) y 0 y ω0 = γBz 6 Il moto è una “Precessione” intorno alla direzione del campo (in questo caso B//z), alla frequenza di Larmor ω0=-γB z B0 γ>0 (caso di 1H o 13C) la direzione di ω0 è opposta a B0 µ y x z B0 γ<0 (caso di elettroni) la direzione di ω0 è la stessa di B0 µ y 7 x Un campione macroscopico contiene un numero elevato di momenti magnetici elementari (dati dagli spin nucleari o elettronici). Il vettore magnetizzazione è dato dal momento di dipolo magnetico totale per unità di volume µ ∑ M= i V Mx =My = 0 All’equilibrio: z Mz ≠ 0 B0 M Quindi M // B0 y x 8 La componente Mz è diversa da zero a causa della diversa popolazione degli stati di spin paralleli o antiparalleli al campo. Es: per S=1/2 vi è un eccesso di spin β rispetto agli spin α Energia α Nα β Nβ 9 Le componenti Mx ed My sono nulle all’equilibrio perchè i singoli spin hanno fase statisticamente distribuita: la somma delle componenti x ed y si annulla. z B0 y x Mx = My = 0 10 Il vettore magnetizzazione in un campo magnetico segue la legge del moto di un momento magnetico: dM = M ∧ γB0 dt Quindi M è soggetta ad un moto di precessione alla frequenza di Larmor. M z(t) = M z( 0 ) M x = M x( 0 ) cos(ω0t ) M y = M y( 0 ) sin (ω0t ) ω0 = −γB0 11 TEMPI DI RILASSAMENTO: T1 Se si perturba la situazione di equilibrio, ad esempio partendo da B0=0 e accendendo al tempo t=0 il campo magnetico A t=0 è B0=0 e la Magnetizzazione è nulla Mx = My = Mx = 0 A t>0 è B0≠0 e Mz tende al valore di equilibrio Mzeq con la legge: ( dM z M z − M zeq =− dt T1 ) Da cui t=0 t − M z = M zeq 1 − e T1 T1 è detto il tempo di rilassamento Longitudinale (o tempo di rilassamento spin-reticolo) 12 TEMPI DI RILASSAMENTO: T2 Se invece per qualche motivo vi sono componenti x,y della magnetizzazione non nulle: Mx ≠ 0 My ≠ 0 Il sistema si porta all’equilibrio annullando le componenti Mx e My , secondo le: dM x Mx =− dt T2 dM y dt =− My T2 Da cui M x = M x0e − t T2 M y = M y0e − t T2 Il tempo caratteristico T2 viene detto tempo di rilassamento trasversale (o tempo di rilassamento spin-spin) 13 Il tempo T1 si riferisce a processi che tendono a ripristinare l’equilibrio termico, con le popolazioni di Boltzmann tra gli stati di spin Il tempo T2 si riferisce a processi che tendono a disordinare la fase dei singoli spin e non dipendono da scambi di energia con l’ambiente che circonda gli spin Esiste il seguente vincolo tra i due tempi di rilassamento: T1 ≥ T2 14 Le equazioni del moto della magnetizzazione in presenza dei rilassamenti sono quindi: dM x Mx = γM y B z − T2 dt dM y My = −γM x B z − T2 dt eq dM M z z −Mz = dt T1 15 Cosa cambia nel moto della Magnetizzazione in presenza di una radiazione elettromagnetica? La radiazione ha una componente magnetica B1 oscillante lungo una direzione ortogonale a B0//z, ad esempio lungo x r B1 (t ) = iˆB1 cos(ωt ) Una radiazione linearmente polarizzata può essere descritta come somma di due radiazioni circolarmente polarizzate con senso di rotazione opposto 16 Quindi la radiazione può essere descritta da: r B1 (t ) = iˆB1 cos(ωt ) + ˆjB1 sin (ωt ) B1x B1 y Il moto della Magnetizzazione in presenza del campo statico e della radiazione, è definito in forma compatta dalla equazione ( dM M ⊥ M zeq − M z = M ∧ (B 0 + B1 ) − + dt T2 T1 ) 17 Le equazioni per le singole componenti della magnetizzazione sono le: Equazioni di Bloch dM x Mx = γM y B0 + γM z B1 sin (ωt ) − T2 dt dM y My = −γM x B0 + γM z B1 cos(ωt ) − T2 dt eq dM M z z − Mz = −γM x B1 sin (ωt ) − γM y B1 cos(ωt ) − dt T1 Queste equazioni possono essere risolte per fornire i valori di Mx, My,Mz. Risulta però conveniente ricorrere al sistema di riferimento rotante. 18 Supponiamo di avere la magnetizzazione derivante da spin nucleari: il verso di precessione della magnetizzazione è x→ -y → -x → y. Si considera la componente della radiazione che ruota nella stessa direzione (B1-) In un sistema rotante alla stessa velocità angolare ω della radiazione, la componente B1 è statica 19 Nel sistema rotante quindi il moto della magnetizzazione è descritto da: ( ω M '⊥ M zeq − M z dM ' + = γM '∧ + B 0 + B1 − dt T1 γ T2 ) La Magnetizzazione nel sistema rotante risente di un campo efficace pari a ω Beff = + B0 + B1 γ Se ω = −γB0 allora Beff = B1 In questo caso La Magnetizzazione nel sistema rotante risente di un campo efficace pari a B1 20 Le equazioni di Bloch nel sistema rotante si semplificano: dM ' x M 'x = M ' y (ω0 + ω ) − T2 dt dM ' y M 'y = M' z γB1 + M ' x (ω0 + ω ) − T2 dt eq dM M z z −Mz = − M ' y γB1 + dt T1 ω0 = γB0 La soluzione del caso stazionario, (quando non si ha variazione di M) si ricava ponendo : dM ' x dM ' y dM z = = =0 dt dt dt 21 Le componenti di M’ nel caso stazionario si ottengono dalle equazioni precedenti, (sistema di equazioni lineari): 2 γ B T eq 1 2 (ω − ω0 ) M 'x = M z 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 γB1T2 M 'y = M 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 eq z 1 + T (ω − ω0 ) M 'z = M 2 2 1 + T2 (ω − ω0 ) + γ 2 B12T1T21 eq z 2 2 2 22 In condizioni ordinarie si opera con intensità di radiazione bassa, quindi γ 2 B12T1T2 << 1 condizioni di non saturazione In questa condizione le equazioni si semplificano: 2 B T γ eq 1 2 (ω − ω0 ) M 'x = M z 2 1 + T22 (ω − ω0 ) γB1T2 eq M 'y = M z 2 1 + T22 (ω − ω0 ) M ' z = M zeq 23 La componente M’y “ fuori fase di 90°” con la radiazione è una funzione Lorenziana γB1T2 M 'y = M 2 1 + T22 (ω − ω0 ) eq z a y= b + x2 x = ω − ω0 E viene detta componente di assorbimento La componente M’x “in fase” con la radiazione è la componente in dispersione 2 γ B T eq 1 2 (ω − ω0 ) M 'x = M z 2 1 + T22 (ω − ω0 ) 24 La componente M’y “fuori fase” con la radiazione è legata all’assorbimento di potenza della radiazione ed è la curva che viene rivelata in un esperimento spettroscopico convenzionale In risonanza magnetica la strumentazione è costruita per rivelare la componente della magnetizzazione trasversale (assorbimento e/o dispersione). assorbimento dispersione 25 Le equazioni di Bloch nel sistema d’assi di laboratorio : z dM x M = γ (B ∧ M )x − x dt T2 dM y dt = γ (B ∧ M )y − z’ My T2 y’ dM z M zeq − M z = γ (B ∧ M )z + dt T1 y x ω x’ Le relazioni che legano la magnetizzazione descritta nel sistema fisso (Mx, My, Mz) alla magnetizzazione nel sistema rotante (M’x, M’y,Mz) sono: M ' x = M x cos(ωt ) + M y sin(ωt ) M ' y = − M x sin(ωt ) + M y cos(ωt ) M ' x cos(ωt ) + sin(ωt ) M x = M ' M y − sin(ωt ) cos(ωt ) y Occorre ricordare che la componente di Mx’ è in fase con il B1x, e la componente 26 di My’ è sfasata di 90° Le equazioni di Bloch nel sistema d’assi rotante: z M ' x cos(ωt ) + sin(ωt ) M x = M ' y − sin(ωt ) cos(ωt ) M y z’ y’ y x dM ' x M' = M ' y (ω0 + ω ) − x dt T2 dM ' y dt = M ' y (ω0 + ω ) + γB1M z − My T2 ω x’ ω0 = γB0 dM z M zeq − M z = −γB1M ' y + dt T1 27 Le soluzioni delle equazioni di Bloch, nel sistema d’assi rotante, sono: “in-phase” γB1T22 (ω − ω0 ) M 'x = M 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 eq z “out-of-phase” M ' y = M zeq γB1T2 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 dispersione assorbimento (Lorenziana) 1 + T22 (ω − ω0 ) M 'z = M 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 2 eq z O, nel caso γ 2 B12T1T2 << 1 2 B T (ω − ω0 ) γ M ' x = M zeq 1 22 2 1 + T2 (ω − ω0 ) γB1T2 M ' y = M zeq 2 1 + T22 (ω − ω0 ) M ' z = M zeq 28 Quindi le componenti della magnetizzazione (soluzioni delle equazioni di Bloch) nel sistema fisso sono: 2 T 2 γB1 M x = M zeq 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 1 (ω − ω0 ) cos ωt − sin ωt T2 1 T22γB1 eq ( ) My = Mz ω − ω0 sin ωt + cos ωt 2 2 2 2 T2 1 + T2 (ω − ω0 ) + γ B1 T1T2 29 Sperimentalmente, nelle risonanze magnetiche (NMR ed EPR) si misurano le componenti della magnetizzazione ortogonali al campo B0: z B0 Mxy y x ωo Bobina di ricezione (probe) La componente trasversale (nel piano x,y) della magnetizzazione precede alla frequenza di Larmor. La componente lungo y della magnetizzazione oscilla e genera una tensione oscillante alla frequenza ai capi della bobina di ricezione (flusso di B variabile nella bobina) 30 Dimostrazione del perché la componente fuori fase (rispetto alla radiazione incidente) della magnetizzazione è relativa all’assorbimento di energia Si definisce una magnetizzazione complessa M c = M x' + iM y' E una suscettività magnetica complessa χ c (ω ) = χ ' (ω ) + iχ " (ω ) Ma vale la relazione: M c = χ c Bc Dove il campo B è il campo della radiazione. Si considera il campo B1x oscillante della radiazione come la parte reale di una grandezza complessa: Bc = 2 B1 [cos(ωt ) + i sin (ωt )] B1 x = Re[Bc ]= 2 B1 cos ωt 31 Inoltre si considera la componente Mx come la parte reale della magnetizzazione complessa: M x = Re[M c ] = Re[χ c Bc ] Svolgendo il prodotto χcBc si ottiene: M x = 2 B1χ 'cos ωt − 2 B1χ "sin ωt Se si confronta con le espressioni per Mx e My T22γB1 Mx = M 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 1 (ω − ω0 ) cos ωt − sin ωt T2 2 1 T eq 2 γB1 My = Mz (ω − ω0 )sin ωt + cos ωt 2 2 2 2 T2 1 + T2 (ω − ω0 ) + γ B1 T1T2 eq z 32 si vede che risulta: T22γM zeq (ω − ω0 ) χ' = 2 1 + T22 (ω − ω0 ) + γ 2 B12T1T2 T2γM zeq χ" = 2 2 1 + T2 (ω − ω0 ) + γ 2 B12T1T2 E anche M ' x = 2 χ 'B1 Componenti della Magnetizzazione nel sistema rotante M ' y = 2 χ "B1 33 Per determinare la potenza assorbita da un campione si deve considerare il sistema costituito dal campione e la bobina. L’impedenza rappresentata da una induttanza L e da una resistenza R in serie è data da: Z = R + iωL La potenza dissipata in un ciclo è pari a: 1 2 P = I0 R 2 Dove I0 è la corrente massima che percorre il circuito. In assenza del campione l’impedenza è data dalla resistenza e dalla induttanza della bobina: Z 0 = R0 + iωL0 Il campione modifica l’impedenza variando l’induttanza (cambia la permeabilità magnetica µ ): L = L0 (1 + 4πχ c ) 34 Risulta quindi: Z = R0 + iωL0 (1 + 4πχ c ) Z = (R0 + 4πωχ ") + iωL0 (1 + 4πχ ' ) La dissipazione di potenza è legata alla componente resistiva, quindi alla parte immaginaria della suscettività magnetica χ” T2γM zeq χ" = 2 2 1 + T2 (ω − ω0 ) + γ 2 B12T1T2 Quindi i picchi di assorbimento in risonanza magnetica sono dati da T2γM zeq f (ω ) = A 2 2 1 + T2 (ω − ω0 ) + γ 2 B12T1T2 Dove A è una costante che dipende da fattori strumentali 35
© Copyright 2026 Paperzz