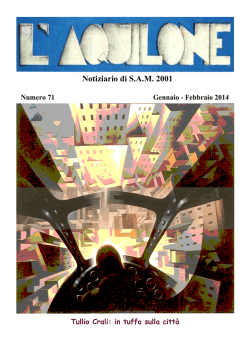
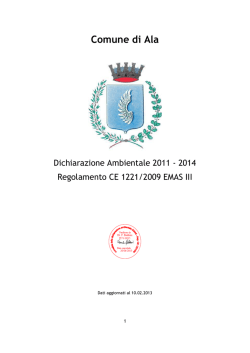
Corso di AERODINAMICA E GASDINAMICA Anno Accademico 2013/2014 - Lezione N.13 - Prof. Ing. Renato RICCI Determinazione dell’ala equivalente Una pianta alare può presentare una geometria abbastanza complessa, ad esempio come quella riportata in figura. E’ conveniente trasformare l’ala reale in una ala rettangolare equivalente dotata: della stessa superficie ed avente una corda pari alla Corda Media Aerodinamica dell’ala reale. La determinazione di tale ala richiede il calcolo dei seguenti parametri: • Area totale dell’ala reale (Atot) • CMA dell’ala reale (l0E) • Posizione del Centro Aerodinamico dell’ala reale • Posizione del bordo di entrata dell’ala rettangolare equivalente (x0E) s Centina Media Geometrica l ( y) dy CMG 0 s s Centina Media Aerodinamica CMA 2 l 2 (y) dy 0 Atot Area totale dell’ala reale 1 N Atot 2 si li li 1 Atip 2 i 1 Nota: l’indice N della sommatoria corrisponde al pedice 3 della figura, ossia indica la posizione della penultima sezione a pianta trapezoidale. Calcolo dell’area dell’estremità alare Il calcolo dell’area di Tip richiede particolare attenzione; nelle ali di vecchia generazione l’estremità non presenta forme particolari, nei velivoli odierni, al contrario, l’estremità alare riveste un ruolo molto importante per la riduzione della resistenza indotta, ed è molto frequente l’uso di Tips di forma ellittica. In questo caso l’area di Tip viene calcolata come somma di due sotto-aree: l’area della porzione ellittica, Ae, e quella della porzione triangolare, Ar. La porzione ellittica presenta una corda centrale pari a le, dove quest’ultima lunghezza viene trovata prolungando il bordo di entrata come in figura. Atip Ae Ar ; Ae 1 CMA lE Atot 1 le sa ; Ar lN 1 le sa ; 4 2 1 2 4 4 2 N 2 si li 2 li li 1 li 12 sa lN 1 le lN 1 le le le 2 3 3 3 i 1 Atot 3 1 1 N si x0i 2 li li 1 x0i 1 li 2 li 1 Atot 3 i 1 1 x x 5 sa le 1 x0 N 1 r 3 le l N 1 x0 N 1 r le Atot 3 3 3 2 2 x0 E Il Centro aerodinamico dell’ala rettangolare equivalente sarà così posizionato a: xCA xoE lE 4 Profilo Alare Equivalente Per determinare il profilo equivalente, con cui equipaggiare l’ala equivalente, è necessario dapprima analizzare il numero di Reynolds locale a cui operano le diverse sezioni dell’ala. A questo punto sarà possibile determinare la polare equivalente, generata attribuendo ad ogni valore di Cl il valore medio dei Cd delle diverse sezioni. 1.4 1.2 1.0 Cl 0.8 0.6 0.4 Profilo 2D Retta di regressione (2D) Retta di regressione (3D) 0.2 0.0 -4 -2 0 2 4 Alfa (°) 6 8 10 12 Polare del profilo equivalente Una volta determinato il profilo equivalente è necessario apportare le dovute correzioni, tenendo conto della riduzione di portanza dello stesso una volta che sia stato installato sull’ala reale. Per far ciò è necessario determinare il parametro che ci consente di calcolare il coefficiente angolare della retta di regressione dell’ala finita. Solo a questo punto sarà possibile passare al calcolo della polare CL vs. CD dell’ala reale, è ovviamente indispensabile calcolarsi prima il valore del parametro . Possiamo ora aggiungere il coefficiente di resistenza della fusoliera, che in prima approssimazione può essere preso pari a 0.01, ed ottenere così la polare del velivolo completo. CL a0 ( geo. L 0 ) a (1 ) 1 0 AR 2 C D ,i D C i L (1 ) q S AR C D (3D) Cd C D.i C D , fus 0.01 C D ,Totale Cd C D.i C D , fus Dati Utili 0.14124641633 0.97091851 2.4774070818 2 2.6141600532 3 1.0165658986 4 0.16440710815 1.0261788889 1.9558999327 2 0.9276965977 3 N Qualora la semiala fosse composta da più di una rastrematura il fattore “beta” da inserire nella formula è calcolabile come Media Ponderata rispetto alle superfici di ogni porzione della semiala. i 1 i Si N Si ctip croot i 1 Per quanto riguarda la resistenza indotta dalla presenza della fusoliera, nelle pagine precedenti è stato assunto per semplicità un valore costante, pari a CD 0,01 fusoliera 200000 Re ala (1) CD 0,01 fusoliera 150000 Re ala (2) 0.01; quando il calcolo è dedicato a modelli in scala è preferibile adottare una formula più precisa che tiene conto del numero di Reynolds a cui opera l’ala stessa del velivolo. Per modelli di alianti da riproduzione o da aerotraino è preferita la formula (1), per modelli da F3B o F3J è consigliata la (2). Sistemi di controllo di un velivolo (1) Le superfici aerodinamiche che equipaggiano un velivolo sono, in genere, tre: l’ala, il piano stabilizzatore orizzontale ed il piano stabilizzatore verticale. Ognuna di tali superfici è, a sua volta, dotata di parti mobili, come: gli alettoni, la deriva orizzontale e quella verticale. Gli alettoni permettono al velivolo di compiere una rotazione attorno all’asse di Rollio. La deriva orizzontale opera in modo da realizzare una rotazione attorno all’asse di Beccheggio La deriva verticale serve a garantire la rotazione attorno all’asse di Imbardata. Sistema di controllo di un velivolo (2) Azionamento dei comandi Nel comando di Rollio l’alettone che si abbassa aumenta la portanza della semiala su cui lo stesso è collocato. Il contrario avviene sull’alettone che si alza. Se le due superfici presentano la stessa escursione angolare avremo che la semiala maggiormente portante eserciterà una resistenza maggiore dell’altra semiala. Ciò porta ad un momento imbardante, opposto al verso della virata indotta dal Rollio. Per evitare tale situazione è necessario che l’escursione angolare dell’alettone che si alza sia maggiore dell’altro, ossia che venga applicato un Comando Differenziale agli Alettoni. Da un punto di vista dinamico bisogna inoltre tener presente che la semiala che si abbassa, durante la rotazione, si trova ad operare ad un angolo di attacco maggiore dell’altra che si alza, e ciò porta ad un rallentamento dell’azione di rollio che risulta fortemente dipendente dall’inerzia rotazionale del velivolo stesso. Per velocità di rotazione elevate e per grandi escursioni angolari del comando degli alettoni esiste il rischio tangibile di uno stallo dell’ala interna alla virata e, quindi, di una Scivolata di Ala. Nel caso più generale la virata viene sempre effettuata mediante l’azione combinata di tutte le superfici mobili riportate in figura. Stabilità Longitudinale Statica Uno degli aspetti progettuali più importanti è il Posizionamento del Centro di Gravità del velivolo. Lo scopo è quello di permettere all’aeromobile di volare all’angolo di incidenza effettiva, stabilito in fase di progetto. A tale angolo l’impennaggio orizzontale dovrà esercitare un’azione stabilizzatrice che faccia si che il Momento totale aerodinamico rispetto al Centro di Gravità sia nullo. Ciò garantisce che in condizioni statiche il velivolo permanga all’angolo di progetto durante il volo. La condizione di Stabilità Longitudinale Statica impone che ad ogni variazione dell’angolo di volo, rispetto a quello di equilibrio, il velivolo risponda con un momento riequilibrante. angolo assoluto 1) Cm ,CG ( e ) 0 Condizioni necessarie e sufficienti per la Stabilità Longitudinale Statica 2) Cm ,CG ( 0) 0 Cm,CG ( ) 3) 0 Stabilità Longitudinale Statica e posizione del CG Stabilità Longitudinale Dinamica Se un velivolo è stabile staticamente non è detto che lo sia Dinamicamente. La Stabilità Statica, infatti richiede che ad una variazione dell’angolo di volo il velivolo risponda in modo riequilibrante, ma non richiede che torni in equilibrio; tale certezza la si può avere solo se si analizza il comportamento dell’aeromobile in condizioni transitorie. Come riportato nella figura sottostante, il ritorno alla posizione di volo stabile può avvenire in modo monotono, oppure mediante un moto oscillatorio smorzato; in ambedue i casi siamo certi che il sistema è Stabile Dinamicamente. Qualora però il ritorno verso la posizione di volo stazionario avviene a mezzo di un moto oscillatorio ad ampiezza crescente si è in presenza di un sistema Stabile Staticamente ma Instabile Dinamicamente. La corretta posizione del baricentro e il posizionamento degli assi principali di inerzia del velivolo possono garantire che lo stesso raggiunga una condizione di Stabilità Dinamica. Stabilità longitudinale dinamica e statica Determinazione del baricentro (1) Per prima cosa dobbiamo individuare quali sono le forze in gioco rispetto al baricentro. Per far questo dobbiamo avere già determinato l’ala equivalente ed il profilo alare equivalente; ossia il velivolo è stato ridotto ad un sistema formato da un’ala rettangolare di corda pari alla C.M.A. e di una coda rettangolare di appropriata CMA. Posizioniamo le azioni aerodinamiche dell’ala e della coda sui rispettivi CMA/4, aggiungendo il proprio momento di trasporto: Cm(c/4). Determinazione del Baricentro (2) L’angolo riportato nelle formule seguenti è sempre l’angolo assoluto, e gli assi di riferimento delle superfici aerodinamiche sono quelli di portanza nulla. Momento baricentrico delle azioni aerodinamiche dell’ala MCGW LW cosw h hAC c MACW DW senW h hAC c LW senw z c DW cosW z c Poiché DW è piccolo rispetto ad LW e l’angolo assoluto è piccolo, ovviamente in condizioni di volo stazionario, possiamo scrivere: senW W in radianti ; cos W 1; Oltre a ciò la distanza (z c) fra il baricentro e l’asse di portanza nulla è in genere molto piccola, possiamo così scrivere: MCGW C mCGW CLW h hAC C mACW q Atot c Determinazione del Baricentro (3) MCGt Lt cos w F h c MAC t Dt sen w F h c Lt sen w zt Dt cos w zt Come fatto in precedenza possiamo applicare alcune semplificazioni: C mCAt 0; Dt Dw 0 CLt F h c At MCGt C mCGt q Atot c Atot c F hc CA Determinazione del Baricentro (4) Condizione di volo stazionario CLt F h c At C mCG CLW h hAC C mACW 0 Atot c aLt t F h c At C mCG aLW w h hAC C mACW 0 Atot c 2 C LW t w it AR Condizione di Stabilità Longitudinale Statica aLt F h c At C mCG aLW h hAC w Atot c 2 aLW 1 0 AR Determinazione del Baricentro (5) L’equazione precedente non ammette una soluzione unica ma fornisce un numero infinito di soluzioni, limitato solo da un lato. Per tale ragione possiamo cercare la soluzione limite della relazione precedente che si ottiene ponendo uguale a zero l’equazione stessa. Il punto che troveremo fornirà la posizione più arretrata del baricentro, oltre la quale non si potrà avere Stabilità Statica. Tale punto, detto Punto Neutro, è quello che individua la posizione di Equilibrio Indifferente. Determinazione del Punto Neutro (Posizione più arretrata del baricentro) aLt F hN c At C mCG aLW hN hAC w Atot c 2 aLW 1 0 AR aLt F At 2 aLW 1 Atot c aLW AR hN aLt c At 2 aLW 1 1 A c a AR tot LW hAC Margine Statico (Condizione di stabilità) = (hN – h) 0.05 (hN h ) 0.20 Esercizio sulla Stabilità Longitudinale Statica (1) Esercizio sulla Stabilità Longitudinale Statica (2) Profilo equivalente dell’Ala Profilo equivalente della coda Profilo NACA 0012 Profilo NACA 63212 2.0 2.0 Cl=0.0947954*alfa(°)+0.0318026 Cl=0.0906654*alfa(°)+0.1513129 1.5 1.5 1.0 1.0 0.5 Cl Cl 0.5 0.0 0.0 -15 -10 -5 0 -0.5 5 Alfa (°) 10 15 20 -15 -10 -5 0 -0.5 -1.0 -1.0 -1.5 -1.5 5 10 15 20 Alfa (°)
© Copyright 2026 Paperzz