力学 2・解析力学
東京理科大学理学部物理学科
平成 26 年度版
目次
第I部
力学 2
2
第 0 章 質点の運動,質点系の運動の復習
0.1
質点の運動
0.1.1
0.1.2
0.1.3
0.1.4
0.1.5
0.2
0.3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Newton の運動法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Newton 運動方程式に従う運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
1
運動量保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
3
角運動量保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
エネルギー保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
質点系の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.2.1
質点系の運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.2.2
0.2.3
0.2.4
質点系の運動量保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
質点系の角運動量保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
5
0.2.5 重心のまわりの角運動量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
質点系のエネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
7
質点系の運動エネルギーと仕事 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
質点系のポテンシャルの例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
8
10
0.3.4 重心運動と相対運動への分離 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ビリアル定理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
11
0.3.1
0.3.2
0.3.3
0.4
1
質点系の重心の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
内力がポテンシャルによって与えられる場合 . . . . . . . . . . . . . . . . . . . . . . .
第 1 章 Lagrange 方程式
1.1
14
質点系の力学の基本法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.1.1
1.1.2
1.2
1.3
1.4
質点系の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
拘束条件がある場合の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
16
Lagrange 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
22
26
一般化座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lagrange 方程式の導出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lagrange 方程式の例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
26
28
時間に依存する拘束条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
35
仮想仕事の原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1
1.4.2
1.4.3
1.5
1.6
質点の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
加速度系での運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1
1.6.2
原点が加速度運動する場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
回転座標系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
36
第 2 章 剛体の運動
2.1
39
剛体の運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.1.1
剛体の自由度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
39
2.2
2.1.2 剛体のつり合い . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
固定軸を持つ剛体の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
42
固定軸を持つ剛体の運動エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . .
エネルギー保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
43
44
剛体の角運動量と慣性モーメント . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 剛体の角運動量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
47
2.3.2 剛体の慣性モーメント . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 剛体に働く外力の行う仕事 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
剛体の平面運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
50
52
剛体の平面運動の Lagrange 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
エネルギー保存則と仕事 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
54
2.4.3 拘束条件がある場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
剛体の三次元的な運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
60
2.2.1
2.2.2
2.2.3
2.3
2.4
2.4.1
2.4.2
2.5
第 II 部
固定軸を持つ剛体の Lagrange 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . .
解析力学
62
第 3 章 Hamilton の変分原理
3.1
63
変分原理による力学法則の定式化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.1.1 質点の一次元運動の場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.1.2
3.1.3
3.2
3.3
一般的な場合への拡張 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
周期運動の場合の変分原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
仮想仕事の原理から Hamilton の変分原理を導くこと . . . . . . . . . . . . . . . . . . . . . .
変分原理に関する補足 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1
Euler-Lagrange 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2
3.3.3
汎関数微分について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
物理学における変分原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
66
68
68
68
68
69
第 4 章 Hamilton の正準形式
4.1
70
正準運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.2
4.3
位相空間 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Poisson 括弧式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
82
第 5 章 正準変換
5.1
5.2
84
座標変換と正準変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
母関数による正準変換の方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Hamiltonian による変分原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
母関数による正準変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
90
5.2.3 正準変換の形式と母関数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
正準変換の性質 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 正準変換の必要十分条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
96
96
5.2.1
5.2.2
5.3
5.4
5.3.2 正準変換不変量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
無限小変換と保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.4.1
5.4.2
無限小変換の生成子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
ネーターの定理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
ii
第 6 章 微小振動
6.1
102
1次元の微小振動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.2
多自由度系の微小振動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.3
6.2.1
6.2.2
微小振動の Lagrange 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.2.3
Hamiltonian による記述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
基準振動と基準座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
連続体の振動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
iii
はじめに
「力学 2」では「力学1」に引き続き,ニュートン力学におけるより高度な問題を扱う.前半では Lagrange
形式について学ぶ.Newton 運動方程式から出発して,座標系の取り方によらない形の方程式(Lagrange 方
程式)を導き,質点系の運動や拘束条件付きの運動の問題に対する Lagrange 方程式を用いた解法を学ぶ.後
半では,
「力学1」では触れられなかった剛体,連続体の力学について学ぶ.
「解析力学」では Hamilton の変分原理により力学を定式化し直す.次に,力学変数として運動量と座標
(正準変数)を用いた Hamilton の正準形式について学ぶ.この講義では,上に述べた解析力学の基本的な考え
方について紹介し,そこに出てくる諸概念, たとえば作用積分,Hamiltonian, 正準変数,位相空間,Poisson
括弧式, などについて説明する.さらに,量子力学, 統計力学を学ぶ上で必要となる基本的知識を身につける
ことを目的とする.
第I部
力学 2
第 0 章 質点の運動,質点系の運動の復習
質点の運動
0.1
ある物体の運動を記述する場合,その大きさが無視できるようなとき,その物体を質点と呼ぶ.質点の運
動をデカルト座標(直交座標)を用いて r(t) = (x(t), y(t), z(t)) で表す.ベクトル r を位置ベクトルと呼ぶ.
位置ベクトル r の時間 t についての導関数を速度,二階導関数を加速度という.
v=
0.1.1
dr
= r˙ ,
dt
a=
d2 r
= ¨r
dt2
(1)
Newton の運動法則
質点の運動は,以下の Newton の運動法則に従う.
• 慣性の法則:力が働いていない場合,物体は等速直線運動をする.
• 運動法則:加速度は力に比例する.
m
d2 r
=F
dt2
(2)
(2) 式は Newton の運動方程式と呼ばれる.
• 作用・反作用の法則:物体 1 が物体 2 に及ぼす力(F21 )は,物体 2 が物体 1 に及ぼす力(F12 )と大
きさが同じで逆向きである.
F12 = −F21
0.1.2
(3)
Newton 運動方程式に従う運動
上でも述べたように,Newton 力学の出発点は Newton の運動方程式
m
d2 r
=F
dt2
(4)
である.力 F が具体的に座標 r と時間 t の関数として与えられていれば,運動方程式を指定された初期条件
のもとで解くことにより,様々な運動を実際に求めることができる.
「力学 1」で学んだように,以下に挙げ
る力については運動方程式を解析的に解くことが出来る.
• 自由落下:m¨
z = −mg
• 速度に比例する抵抗下での落下:m¨
z = −mg − k z˙
• ばの運動:m¨
x = −kx
• 振子の運動:mθ¨ = − mg
l sin θ
• ケプラー運動:m¨r = −G Mr2m rr
1
上に挙げた運動方程式を適当な初期条件のもとで解く方法については,各自の自習に任せる.
ポテンシャル U が存在する場合,力は
F = −∇U
(5)
∂
∂
∂
ˆ
ˆ
+y
+z
∂x
∂y
∂z
(6)
で与えられる.ここで
ˆ
∇=x
である.このように,ポテンシャルによって与えられる力を保存力と呼ぶ.このときの Newton 運動方程式は
d2 r
= −∇U
dt2
(7)
p = mv = m˙r
(8)
m
となる.
0.1.3
運動量保存則
質点の運動量 p は
で定義される.質点の運動方程式を運動量 p を用いて表すと
dp
=F
dt
(9)
と書ける.特に,質点に力が働いていない場合(F = 0)
dp
=0
dt
(10)
となり運動量は時間によらない定数となる.これを運動量保存則と呼ぶ.
0.1.4
角運動量保存則
質点の角運動量は
l = r × p = mr × r˙
(11)
で定義される.角運動量の時間変化を考えよう.(11) 式の時間微分
d
dl
=
(mr × r˙ ) = m(˙r × r˙ + r × ¨r) = mr × ¨r
dt
dt
(12)
に Newton 運動方程式を用いると
dl
=r×F
(13)
dt
を得る.右辺の r × F は力のモーメント,又はトルクと呼ばれる.特に力が中心力で F = F (r)ˆ
r という形に
与えられる場合は r × F = 0 なので
dl
=0
(14)
dt
であり角運動量は時間によらない定数となる.これを角運動量保存則と呼ぶ.力が球対称なポテンシャル U (r)
によって与えられる場合,力は
dU
ˆr
F = −∇U = −
(15)
dr
と中心力になるので角運動量が保存する.
2
0.1.5
エネルギー保存則
力が保存力の場合を考える.質点の力学的エネルギーは
E=
m 2
m
v + V (r) = r˙ 2 + U (r)
2
2
(16)
で与えられる.第一項は運動エネルギー,第二項はポテンシャルエネルギーである.エネルギーの時間変化
を考えると
]
dE
d [m 2
=
r˙ + V (r) = m˙r · ¨r + r˙ · ∇U = r˙ · (m¨r + ∇U )
dt
dt 2
となる.Newton 運動方程式より m¨
r + ∇U = 0 であるから
dE
=0
dt
(17)
(18)
となり,エネルギーは時間によらない定数となる.これをエネルギー保存則と呼ぶ.
0.2
0.2.1
質点系の運動
質点系の運動方程式
質点が多数集まって運動している場合を考える.質点の集まりを「質点系」と呼ぶ.一般に N 個の質点か
らなる系の運動を記述するためには 3N 個の変数が必要となる.
(r1 (t), · · · , rN (t)) = (x1 (t), y1 (t), z1 (t), x2 (t), y2 (t), z2 (t), · · · , xN (t), yN (t), zN (t))
質点系の Newton 運動方程式は
mi
d2 ri
= Fi
dt2
(19)
(20)
と書ける.
一般に,質点系に作用する力は質点系の外から作用する力(外力)と質点系の中の質点間に働く力(内力)
がある.i 番目の質点に働く外力を Fex
i ,k 番目の質点から i 番目の質点に働く内力を Fik と書くことにする.
このとき i 番目の質点に働く力 Fi は
Fi = Fex
i +
∑
Fik
(21)
k̸=i
と書ける.i 番目の質点の運動方程式は
mi
∑
d2 ri
= Fex
Fik
i +
2
dt
(22)
k̸=i
となる.ここで二項目の和から k = i が除かれているのは,質点がそれ自身に力を及ぼすことがないからで
ある.そこで全ての i に対して Fii = 0 と定義すれば運動方程式は
∑
d2 ri
= Fex
Fik
i +
2
dt
N
mi
k=1
と書くことができる.
3
(23)
0.2.2
質点系の運動量保存則
i 番目の質点の運動量を pi = mi r˙ i と書く.質点系の運動量(全運動量)は,系の中にある質点の運動量の
和として
∑
P=
pi =
∑
i
mi r˙ i
(24)
i
で定義される.質点系の運動量の時間変化を考えると
N ∑
N
∑
∑
∑
dP ∑
Fik
=
mi ¨ri =
Fi =
Fex
+
i
dt
i
i
i
i=1
(25)
k=1
となる.ここで,最後の項は和の変数を入れ替えることができるので
N ∑
N
∑
Fik =
i=1 k=1
である.よって
N
N ∑
∑
N ∑
N
∑
Fki
(26)
k=1 i=1
1 ∑∑
=
(Fik + Fki )
2 i=1
N
Fki
i=1 k=1
N
(27)
k=1
と書くことができる.ここで運動の第三法則(作用・反作用の法則)より Fik = −Fki であるので (27) 式は
恒等的に 0 になる.よって (25) 式は
dP ∑ ex
Fi
=
dt
i
(28)
となる.これは質点系の全運動量の時間変化は外力のみに依存し,内力にはよらないことを表している.特
に,質点系に外力が働かない場合(系が孤立している場合)には Fex
i = 0 だから
dP
=0
dt
(29)
となり系の全運動量は時間によらず一定になる.これを運動量保存則と呼ぶ.
0.2.3
質点系の重心の運動
質点系の重心(または質量中心)は
∑N
rG =
m i ri
,
M
i=1
M=
N
∑
mi
(30)
i=1
で定義される.この定義は一座標の原点のとり方にはよらない.例えば,原点を定ベクトル r0 だけずらした
座標系で定義される位置ベクトルを r′i とすると
ri = r0 + r′i
であるから
∑N
mi (r0 + r′i )
= r0 +
rG =
M
となる.また,重心 rG を原点とする座標系をとって
(31)
∑N
i=1
mi r′i
= r0 + r′G
M
i=1
ri = rG + r′′i
とすれば
N
∑
i=1
mi r′′i =
N
∑
mi (ri − rG ) = M rG − M rG = 0
i=1
4
(32)
(33)
(34)
であるから,当然のことながら r′′G = 0 である.
重心の位置ベクトル rG に対する運動方程式を考えると
M¨rG =
N
∑
mi ¨ri =
N
∑
i=1
Fi
(35)
i=1
となる.前節での議論により最後の項からは内力の寄与が消えて
M¨rG =
N
∑
Fex
i
(36)
Fex
i
(37)
i=1
となる.質点系に作用する外力の和を
N
∑
Ftotal =
i=1
と表すと (36) 式は
M¨rG = Ftotal
(38)
と書ける.これは形式的には外力 Ftotal のもとで運動する質量 M の質点の運動方程式と同じ形をしている.
孤立系,つまり外力が無い場合を考えると
M¨rG = 0
(39)
となり自由な質点の運動と一致する.つまり,孤立系の重心は等速直線運動を行う.これを重心の運動保存
の法則と呼ぶ.
∑N
Fex
i を重心の位置 rG だけで表すことはできないた
め,質点系の重心の運動はいつでも一つの質点の運動と同じ様に振る舞うというわけではない.特別な場合
一般に質点系に外力が働いている場合,外力の和
i=1
として,系の各質点に以下のような力が働く場合には,重心の運動が1質点の運動と同じになることが示さ
れる.
(1)Fi = −mi gˆ
z(自由落下)
0.2.4
(2)Fi = −mi ω 2 ri (調和振動子)
質点系の角運動量保存則
質点系の角運動量は,各質点の角運動量 li = mri × r˙ i の和として
N
∑
L=
li =
N
∑
i=1
mi (ri × r˙ i )
(40)
i
で与えられる.質点系の角運動量の時間変化を考えると
∑
∑
∑
dL ∑ dli
=
=
(ri × Fi ) =
[ri × (Fex
Fik )]
i +
dt
dt
i
i=1
i=1
N
N
N
N
(41)
k=1
となる.ここで,内力からの寄与は
N ∑
N
∑
1 ∑∑
(ri × Fik + rk × Fki )
2 i=1
N
(ri × Fki ) =
i=1 k=1
N
(42)
k=1
と書けるが,作用・反作用の法則により Fki = −Fik であるから
N ∑
N
∑
1 ∑∑
(ri − rk ) × Fik
2 i=1
N
(ri × Fik ) =
i=1 k=1
N
(43)
k=1
となる.通常,二つの質点 i, k 間に働く力 Fik は(例えばクーロン力や万有引力など)相対ベクトル rik ≡ ri −rk
に平行である.このような場合は
Fik × (ri − rk ) = 0
5
(44)
であるから (41) における内力の寄与は消えて
∑
d
L=
(ri × Fex
i )=N
dt
i=1
N
(45)
∑N
× Fex
i ) は系に働く外力のモーメントの和である.
孤立系で外力が働かない場合は外力のモーメントも 0 であるから
となる.ここで N =
i=1 (ri
d
L = 0 ⇒ L = constant
dt
(46)
となり L は一定である.孤立系でなくても N = 0 であればやはり角運動量は保存する.これを質点系の角
運動量保存則という.
0.2.5
重心のまわりの角運動量
質点系の運動を議論するとき,その運動を重心の運動とこれに相対的な運動とに分けて考えると便利な事
が多い.質点の座標 ri を重心座標 rG とこれに対する相対座標 r′i を用いて表す.
ri = rG + r′i
(47)
質点系の角運動量を重心運動と重心まわりの運動に分けて表すと
L=
N
∑
mi (rG + r′i ) × (˙rG + r˙ ′i )
)
(N
(N
)
N
∑
∑
∑
′
′
′
mi ri × r˙ G + rG ×
mi r˙ i (48)
= M rG × r˙ G +
(mi ri × r˙ i ) +
i=1
i=1
i=1
ここで
N
∑
mi r′i =
i
N
∑
i=1
mi (ri − rG ) = M (rG − rG ) = 0
(49)
i
であるから,(48) 式の 3,4 項目は消える.よって
N
∑
L = M rG × r˙ G +
(mi r′i × r˙ ′i ) = LG + L′
(50)
i=1
となる.ここで
は重心の角運動量であり,
LG = M rG × r˙ G
(51)
N
∑
L =
(mi r′i × r˙ ′i )
(52)
′
i=1
は重心のまわりの角運動量である.
重心の角運動量 LG に対する運動方程式は
dLG
d
= (M rG × r˙ G ) = M r˙ G × r˙ G + M rG × ¨rG = M rG × ¨rG
dt
dt
(53)
ここで重心の運動方程式 (38) より
dLG
= rG × Ftotal
dt
となる.また,重心のまわりの角運動量 L′ に対する運動方程式を導くために (45) 式を用いると
∑
dL
dLG
dL′
dL′
=
+
= rG × Ftotal +
=
[(rG + r′i ) × Fex
i ]
dt
dt
dt
dt
i=1
(54)
N
6
(55)
ここで右辺の第一項は rG ×
∑N
i=1
Fex
i = rG × Ftotal であるから左辺の同じ項と打ち消しあい
∑
dL′
′
=
(r′i × Fex
i )=N
dt
i=1
N
を得る.ここで
N′ =
(56)
N
∑
(r′i × Fex
i )
(57)
i=1
は外力の重心のまわりのモーメントである.
0.3
0.3.1
質点系のエネルギー
質点系の運動エネルギーと仕事
質点系の運動エネルギーは各質点の持つ運動エネルギーの和で与えられる.
T =
N
∑
1
i=1
2
mi r˙ 2i
(58)
質点系の運動エネルギーの時間変化は運動方程式より
∑
∑
dT
d ∑1
mi r˙ i ¨ri =
r˙ i · Fi
=
mi r˙ 2i =
dt
dt i=1 2
i=1
i=1
N
N
N
(59)
時刻 t1 から t2 の間に質点系の運動エネルギーが T1 = T (t = t1 ) から T2 = T (t = t2 ) へ変化したとする.こ
の運動エネルギーの変化は (59) 式の両辺を時間で積分することによって与えられる.
∫
T2 − T1 =
N
t2 ∑
t1
dri
dt =
Fi ·
dt
i=1
∫
N
(2) ∑
(1)
Fi · dri
(60)
i=1
ここで (1), (2) はそれぞれ時刻 t1 , t2 における質点系の配置を表す.
(1) = (r1 (t1 ), r2 (t1 ), · · · , rN (t1 )),
(2) = (r1 (t2 ), r2 (t2 ), · · · , rN (t2 ))
(61)
上式は,質点系の運動エネルギーの変化が各質点に働く力が行う仕事の和に等しいことを示している.前節
までで学んだように,質点系に働く力には内力と外力がある.
∫
T2 − T1 =
N
(2) ∑
(1)
∫
Fex
i · dri +
N ∑
N
(2) ∑
(1)
i=1
Fik · dri
(62)
i=1 k=1
運動量の変化や角運動量の変化を考えた場合,内力の効果が消えることをすでに学んだ.しかし運動エネル
ギーの変化を考えた場合,一般には内力の効果,つまり (62) 式の第二項は 0 にはならない.
特別な場合として,二つの質点間の距離が変わらないように束縛されている場合(例えば質点が固い棒で
つながれている場合),質点間に作用する内力は仕事をしない.例えば質点 1,2に内力 F12 , F21 が行う仕
事は
dW12 = F12 · dr1 + F21 · r2
(63)
である.ここで作用・反作用の法則 F12 = −F21 より
dW12 = F12 · (dr1 − dr2 ) = F12 · dr12
(64)
ただし,r12 = r1 − r2 , dr12 = dr1 − dr2 とした.ここで二点間の距離が一定であれば
(r12 + dr12 )2 ≃ r212 + 2r12 · dr12 = r212
7
(65)
つまり
r12 · dr12 = 0
(66)
で dr12 は必ず r12 に垂直な向きになる.角運動量保存則の議論の際にも仮定したように,内力が
F12 ||r12
(67)
であると仮定すれば,F12 · r12 でああるから内力 F12 , F21 が行う仕事は 0 となる.
0.3.2
内力がポテンシャルによって与えられる場合
特に,内力がポテンシャルによって与えられる場合(保存力の場合)を考える.
Fik = −∇ri Uik (ri , rk ), Fki = −∇rk Uki (rk , ri )
(68)
ここで,
ˆ
∇ri = x
∂
∂
∂
ˆ
ˆ
+y
+z
∂xi
∂yi
∂zi
(69)
である.ここで,ポテンシャルが二質点間の相対ベクトル rik = ri − rk だけの関数であると仮定しよう.
Uik = Uik (ri − rk ) = Uik (rik ), Uki = Uki (rk − ri ) = Uki (rki )
(70)
ただし rik = ri − rk である.このとき,例えば内力の x 成分は
Fikx = −
∂
∂Uik ∂xik
∂Uik
Uik (xik , yik , zik ) = −
=−
∂xi
∂xik ∂xi
∂xik
(71)
∂
∂Uki ∂xik
∂Uki
Uki (xki , yki , zki ) = −
=
∂xk
∂xik ∂xk
∂xik
(72)
Fkix = −
となる.ただし,xik = xi − xk , yik = yi − yk , zik = zi − zk である.y, z 成分に付いても同様で,まとめて
ベクトルの形で表すと
Fik = −∇rik Uik , Fki = ∇rik Uki
(73)
となる.ここで,作用・反作用の法則 Fik = −Fki であることを要請すると
∇rik Uik = ∇rik Uki
(74)
Uik = Uki
(75)
となる.したがって,定数を除いて
内力を与えるポテンシャル Uik はしばしば,二体ポテンシャルと呼ばれる.多くの二体ポテンシャル Uik は
二質点間の距離 |ri − rk | = rik のみに依存し,相対的なベクトル rik の方向にはよらない.このようなポテ
ンシャルを球対称ポテンシャルと呼ぶ.球対称ポテンシャルの場合,内力 Fik は
(
)
∂Uik ∂rik
∂rik
∂rik
∂Uik
ˆ ik +
ˆ ik +
ˆik = −
ˆrik
Fik = −∇rik Uik (rik ) = −
x
y
z
∂rik ∂xik
∂yik
∂zik
∂rik
(76)
となり相対ベクトル rik の向きと平行になる.
質点系の内力ポテンシャル(又は相互作用ポテンシャル)を
∑
U int (r1 , r2 , · · · , rN ) =
Uik (rik )
(77)
i<k
とおく.右辺の i < k は U12 はとって U21 はとらないことを意味する.つまり,質点の対(ペア)に対して
∑
総和をとるという意味であり, (i,k) と記すこともある.この相互作用ポテンシャルを用いると,質点 i に
働く内力の総和は
∑
Fik = −∇ri U int
k
8
(78)
と書ける.
質点系がある配置 (1) から他の配置 (2) に移るまでに内力が行う仕事は
∫
(2)
W int (1 → 2) =
∑∑
(1)
i
∫
(2)
Fik · dri = −
∑
(1)
k
∫
(2)
∇ri U int · dri = −
dU int = U1int − U2int
(79)
(1)
i
となる.ポテンシャル U int が質点の配置 (r1 , r2 , · · · , rN ) によって一意に決まる一価関数ならば,仕事 W int
の値は途中の経路によらない.このとき W int を状態 2 を基準とした状態 1 の内部ポテンシャルエネルギー
と呼ぶ.特に U int = 0 の状態をポテンシャルの基準とすれば,U int そのものが内部ポテンシャルエネルギー
となる.
外力もポテンシャルによって与えられる場合を考える.
ex
Fex
i = −∇ri Ui (ri )
(80)
このとき,質点系の外部ポテンシャルを
U ex (r1 , r2 , · · · , rN ) =
N
∑
Uiex (ri )
(81)
i=1
で定義すると
ex
Fex
i = −∇ri U
(82)
である.このとき,ある配置 (1) から他の配置 (2) に移るまでに外力が行う仕事は
∫
(2)
W (1 → 2) =
ex
(1)
∑
i
∫
∫
(2)
Fi · dri = −
∇ri U
ex
(2)
· dri = −
(1)
dU ex = U1ex − U2ex
(83)
(1)
となる.内力の場合と同様,U ex が質点系の配置によって一意に決まれば,仕事 W ex は経路によらない.こ
のとき W ex を (2) の状態を基準とした (1) の状態の外部ポテンシャルエネルギーと呼ぶ.特に U ex = 0 の状
態をポテンシャルの基準とすれば,U ex そのものが外部ポテンシャルエネルギーとなる.
以上をまとめると,内力も外力もポテンシャルによって与えられる場合,運動エネルギーの変化 (62) 式は
T1 − T2 = −(U1int − U2int ) − (U1ex − U2ex )
(84)
T1 + U1int + U1ex = T2 + U2int + U2ex
(85)
E = T + U int + U ex
(86)
となる.これを書き換えると
となる.質点系のエネルギーを
によって定義すると,(85) 式が任意の状態変化に対して成り立つことより
E = 一定
(87)
が成り立つ.これを質点系のエネルギー保存則と呼ぶ.また,内力のポテンシャルと外力のポテンシャルを
まとめて
U (r1 , r2 , · · · , rN ) = U int (r1 , r2 , · · · , rN ) + U ex (r1 , r2 , · · · , rN )
(88)
と書いて U を単にポテンシャルと呼ぶことにすると,質点系のエネルギー E は
E = T (˙r1 , r˙ 2 , · · · , r˙ N ) + U (r1 , r2 , · · · , rN ) = T ({˙ri }) + U ({ri })
と書ける.
9
(89)
0.3.3
質点系のポテンシャルの例
(i) 重力場
一様な重力
Fi = −mi gˆ
zi
(90)
Uiex (ri ) = mi gzi
(91)
は一体ポテンシャル
によって与えられる.質点系のポテンシャルは
U=
N
∑
mi gzi
(92)
i=1
∑
となる.ところで,(92) 式は重心座標 rG =
i
(
U=
mi ri /M を使うと
N
∑
)
mi z i
g = M zG g
(93)
i=1
と書ける.今の場合では,重力のもとになっている物質(通常は地球を想定する)は考えている質点系の外
にあるので,重力ポテンシャル (92) によって与えられる力は外力である.
(ii) 互いにばねで結ばれているとき
質点 i と質点 k を結ぶばねの自然長を rik0 ,ばね定数を Kik とすると,質点 k から i に作用する内力は
Fik = −Kik (|ri − rk | − rik0 )ˆrik = −Kik (rik − rik0 )ˆrik
(94)
である.この力を与える二体ポテンシャルは
Uik =
であり,質点系のポテンシャルは
U=
1
Kik (rik − rik0 )2
2
1∑
Kik (rik − rik0 )2
2
(95)
(96)
i<k
となる.
(iii) 万有引力
質量 mk の質点 k から質量 mi の質点 i に働く万有引力は
Fik = −G
mi mk
ˆrik
2
rik
(97)
mi mk
rik
(98)
である.万有引力の二体ポテンシャルは
Uik = −G
であり,質点系のポテンシャルは
U = −G
∑ mi mk
i<k
rik
(99)
となる.
(iv) クーロン力
電荷 qk を持つ質点 k から電荷 qi を持つ質点 i へ働くクーロン力は
Fik =
1 qi qk
ˆ
2 rik
4πϵ0 rik
10
(100)
である.クーロン力の二体ポテンシャルはとなる.
Uik =
1 qi qk
4πϵ0 rik
(101)
となる.したがって質点系のポテンシャルは
U=
1 ∑ qi qk
4πϵ0
rik
(102)
i<k
である.
(v) レナード・ジョーンズポテンシャル
アルゴンなどの希ガス中の分子間の相互作用を表すモデルポテンシャルとして,レナード・ジョーンズポ
テンシャル
[( )
( )6 ]
12
σ
σ
Uik = 4ε
(103)
−
rik
rik
がよく用いられる.質点系のポテンシャルは
U=
∑
[(
4ε
i<k
σ
rik
)12
(
−
σ
rik
)6 ]
(104)
となる.このポテンシャルによって与えられる分子間力(粒子 k から粒子 i へ働く力)は
[ ( )
( )6 ]
12
σ
σ
rik
Fik = 24ε 2
−
2
rik
rik
rik
(105)
である.
重心運動と相対運動への分離
0.3.4
質点系の運動エネルギーを重心の運動とそれに相対的な運動とに分けて考える.
ri = rG + r′i ,
rG =
N
∑
mi ri /M,
(M =
i=1
N
∑
mi )
(106)
i=1
とすると
T =
N
∑
1
i=1
2
mi (˙rG + r˙ ′i )2 =
N
∑
1
i=1
mi [(˙rG )2 + 2˙rG · r˙ ′i + r˙ ′2
i ]=
N
N
∑
∑
1
1
M r˙ 2G + r˙ G ·
mi r˙ ′i +
mi r˙ ′2
i
2
2
i=1
i=1
∑
∑
2
ここで右辺第二項目にあらわれる
i
mi r˙ ′i = d(
T =
∑
i
mi r′i )/dt は
i
(107)
mi r′i = 0 より常に 0 である.よって
N
∑
1
1
M r˙ 2G +
mi r˙ ′2
i
2
2
i=1
(108)
となる.つまり,質点系の運動エネルギーは重心運動のエネルギーと相対運動のエネルギーの和で表される.
0.4
ビリアル定理
以下の量を定義しよう.
G=
N
∑
p i · ri =
i=1
N
∑
i=1
11
mi r˙ i · ri
(109)
G の時間微分を考える.
dG ∑
mi (¨ri · ri + r˙ i · r˙ i )
=
dt
i=1
N
(110)
ここで,右辺第一項に運動方程式 mi ¨
ri = Fi を使いて,第二項を運動エネルギー T =
書くと
∑
dG ∑
Fi · ri + 2T
=
dt
i=1
i
mi r˙ 2i /2 を用いて
N
(111)
となる.ここで両辺を時刻 t = 0 から t = T まで積分すると,左辺は
∫ T
dG
= G(T ) − G(0)
dt
0
(112)
となる.また,物理量 A(t) の時間平均を
⟨A⟩ =
∫
1
T
T
A(t)dt
(113)
0
と定義すると,右辺は
∫
0
T
(N
∑
)
Fi · ri + 2T
dt = T
(⟨ N
∑
i=1
⟩
Fi · r i
)
+ 2⟨T ⟩
(114)
i=1
となる.よって
G(T ) − G(0)
=
T
⟨
N
∑
⟩
Fi · r i
+ 2⟨T ⟩
(115)
i=1
ここで,質点系の運動が周期的である場合,T をその周期に選べば (115) 式の左辺は 0 となる.また,周期
運動ではない場合でも座標と速度が全ての質点に対して有限の値を持ち,したがって
G の値にも上限がある
G(T )−G(0) 場合には,T を十分大きくとれば
→
0
となる.いずれの場合でも,長時間平均に対して
T
T →∞
1
⟨T ⟩ = −
2
⟨
N
∑
⟩
Fi · r i
(116)
i=1
が成り立つ.これはビリアル定理と呼ばれる.
もしも力がポテンシャルから導かれるならば Fi = −∇ri U であるからビリアル定理は
⟨N
⟩
1 ∑
⟨T ⟩ =
∇ri U · ri
2
(117)
i=1
内力が無視できて,ポテンシャルが一体ポテンシャルのみである場合は
⟨N
⟩
1 ∑
ex
⟨T ⟩ =
∇ri Ui · ri
2
(118)
i=1
となる.さらに,外力が中心力であれば
1
⟨T ⟩ =
2
⟨
N
∑
dU ex
i
i=1
dri
⟩
ri
(119)
特に一体ポテンシャルが中心からの距離 ri のべき関数で
であるならば
Uiex = αi rin+1
(120)
dUiex
ri = (n + 1)αi rin+1 = (n + 1)Uiex
dri
(121)
12
であるから
⟨T ⟩ =
n+1
⟨U ⟩
2
(122)
となる.
ビリアル定理の応用
(i) 体積 V の箱の中に閉じ込められた自由粒子からなる理想気体では
⟨T ⟩ =
3
pV
2
(123)
が成り立つ.ただし p は気体の圧力である.
(ii) 調和振動子ポテンシャル
mi 2 2
(ω x + ωy2 yi2 + ωz2 zi2 )
2 x i
による外力のもとで運動する自由粒子の系では
Uiex (ri ) =
⟨T ⟩ = ⟨U ⟩
(124)
(125)
が成り立つ.
(iii) 万有引力にしたがう軌道運動(ケプラー運動)の場合,
1
⟨T ⟩ = − ⟨U ⟩
2
が成り立つ.
13
(126)
第 1 章 Lagrange 方程式
質点系の力学の基本法則
1.1
1.1.1
質点の運動
ある物体の運動を記述する場合,その大きさが無視できるようなとき,その物体を質点と呼ぶ.質点の運
動をデカルト座標(直交座標)を用いて r(t) = (x(t), y(t), z(t)) で表す.ベクトル r を位置ベクトルと呼ぶ.
位置ベクトル r の時間 t についての導関数を速度,二階導関数を加速度という.
v=
dr
= r˙ ,
dt
a=
d2 r
= ¨r
dt2
(1.1)
Newton の運動法則
質点の運動は,以下の Newton の運動法則に従う.
• 慣性の法則:力が働いていない場合,物体は等速直線運動をする.
• 運動法則:加速度は力に比例する.
m
d2 r
=F
dt2
(1.2)
(1.2) 式は Newton の運動方程式と呼ばれる.
• 作用・反作用の法則:物体 1 が物体 2 に及ぼす力を F21 ,物体 2 が物体 1 に及ぼす力を F12 とすると,
F12 と F21 は大きさが同じで逆向きである.
F12 = −F21
(1.3)
Newton 運動方程式に従う運動
上でも述べたように,Newton 力学の出発点は Newton の運動方程式 (1.2) である.力 F が具体的に座標 r
と時間 t の関数として与えられていれば,運動方程式を指定された初期条件のもとで解くことにより,様々
な運動を実際に求めることができる.
「力学 1」で学んだように,以下に挙げる力については運動方程式を解
析的に解くことが出来る.
• 自由落下:m¨
z = −mg
• 速度に比例する抵抗下での落下:m¨
z = −mg − k z˙
• ばねの運動:m¨
x = −kx
mg
sin θ
• 振子の運動:mθ¨ = −
l
• ケプラー運動:m¨r = −G
Mm r
r2 r
14
上に挙げた運動方程式を適当な初期条件のもとで解く方法については,各自において復習しておくこと.
保存力
ポテンシャル U が存在する場合,力は
F = −∇U
(1.4)
∂
∂
∂
ˆ
ˆ
+y
+z
∂x
∂y
∂z
(1.5)
で与えられる.ここで
ˆ
∇=x
である.このように,ポテンシャルによって与えられる力を保存力と呼ぶ.このときの Newton 運動方程式は
d2 r
= −∇U
dt2
(1.6)
p = mv = m˙r
(1.7)
m
となる.
運動量保存則
質点の運動量 p は
で定義される.質点の運動方程式を運動量 p を用いて表すと
dp
=F
dt
(1.8)
と書ける.特に,質点に力が働いていない場合(F = 0)
dp
=0
dt
(1.9)
となり運動量は時間によらない定数となる.これを運動量保存則と呼ぶ.
角運動量保存則
質点の角運動量は
l = r × p = mr × r˙
(1.10)
で定義される.角運動量の時間変化を考えよう.(1.10) 式の時間微分
dl
d
=
(mr × r˙ ) = m(˙r × r˙ + r × ¨r) = mr × ¨r
dt
dt
(1.11)
に Newton 運動方程式を用いると
dl
=r×F
(1.12)
dt
を得る.右辺の r × F は力のモーメント,又はトルクと呼ばれる.特に力が中心力で F = F (r)ˆ
r という形に
与えられる場合は r × F = 0 なので
dl
=0
(1.13)
dt
であり角運動量は時間によらない定数となる.これを角運動量保存則と呼ぶ.力が球対称なポテンシャル U (r)
によって与えられる場合,力は
F = −∇U = −
dU
ˆr
dr
(1.14)
と中心力になるので角運動量が保存する.
エネルギー保存則
力が保存力の場合を考える.質点の力学的エネルギーは
E=
m 2
m
v + U (r) = r˙ 2 + U (r)
2
2
15
(1.15)
で与えられる.第一項は運動エネルギー,第二項はポテンシャルエネルギーである.エネルギーの時間変化
を考えると
Á
]
dE
d [m 2
=
r˙ + U (r) = m˙r · ¨r + r˙ · ∇U = r˙ · (m¨r + ∇U )
dt
dt 2
となる.Newton 運動方程式より m¨
r + ∇U = 0 であるから
À(E»r¯ÌËç
dE
=0
dt
(1.17)
となり,エネルギーは時間によらない定数となる.これをエネルギー保存則と呼ぶ.
c4
1.1.2
質点系の運動
r1!
¿È¸º§ÉÌË'!
xi
(1.16)
r2!
r3!
)
図 1.1: 質点系の運動
ˆ
+y
∂
∂
ˆ
+
z
N 個の質点からなる系において,
i 番目の質点の質量を m ,位置ベクトルを r
∂yi
∂zi
d r
i
2
mi
i
dt2
(i = 1, 2, · · · , N )
= Fi
i
とすると,運動方程式は
(1.18)
で与えられる.一般に,力 Fi は外力と内力の和
Fi = Fex
i +
N
∑
Fij
(1.19)
j=1
で与えられる.ここで Fex
i は質点 i に働く外力,Fij は質点 j から質点 i に働く内力(Fii = 0 とする)を表す.
外力と内力が両方とも保存力であるときは,質点系のポテンシャルを以下のように定義することができる.
U (r1 , r2 , · · · , rN ) =
N
∑
Uiex (ri ) +
i=1
∑
Uij (ri , rj )
(1.20)
i<j
ただし Uij (ri , rj ) = Uji (rj , ri ) であるとする.ここで Uiex は外部ポテンシャル,又は一体ポテンシャルと呼
ばれ,以下のように外力を導く.
ex
Fex
i = −∇ri Ui
(1.21)
ただし,
ˆ
∇ri ≡ x
∂
∂
∂
ˆ
ˆ
+y
+z
∂xi
∂yi
∂zi
(1.22)
である.また,Uij は内部ポテンシャル,又は二体ポテンシャルと呼ばれ,以下のように内力を導く.
Fij = −∇ri Uij
(1.23)
もしも二体のポテンシャルが二質点間の距離 rij = |ri − rj | のみに依存する関数(つまり,中心力ポテンシャ
ル)であるとき,内力は
Fij = −
∂Uij
ˆrij = −Fji
∂rij
16
(ˆrij ≡ (ri − rj )/rij )
(1.24)
となる.内力がこのような形を持つとき,外力が無ければ質点系の運動量と角運動量は保存する.
保存力の場合の運動方程式はポテンシャルを使って
mi
d 2 ri
= −∇ri U
dt2
(1.25)
と書ける.また,このとき系の力学的エネルギー
E =T +U
T =
N
∑
1
2
i=1
mi r˙ 2i
(1.26)
(1.27)
は保存する.
N 質点系の運動方程式は 3N 個の座標変数
(r1 , r2 , · · · , rN ) = (x1 , y1 , z1 , x2 , y2 , z2 , · · · , xN , yN , zN )
(1.28)
に対する連立方程式として与えられる.ところで,実際の問題を考える際には様々な座標変換を行うことが
多い.そこで,3N 個の座標変数に,x, y, z 成分をまとめて通し番号をつけて表記すると便利なことがある.
つまり,
(r1 , r2 , · · · , rN ) = (x1 , x2 , · · · , x3N )
(1.29)
とするのである.この記法では質点系の運動方程式は
mi
d2 xi
= Fi
dt2
(i = 1, 2, · · · , 3N )
(1.30)
となる.保存力の場合は Fi = −∂U/∂xi であり,
mi
∂U
d2 xi
=−
dt2
∂xi
(i = 1, 2, · · · , 3N )
(1.31)
となる.この記法は数学的な取り扱いを楽にすることが多いが,物理的なイメージは逆に持ちづらくなる.
また,二体ポテンシャル,運動量,角運動量などをこの記法で表そうとするとかえって複雑になってしまう.
よって,この記法はあくまでも機械的に計算するときのみに用いる記法であると考えた方が良いだろう.
17
演習問題
質点の運動
【1-1-a】質量 m の質点が xy 平面内を運動している.質点はポテンシャル U による力を受けている.今,ポ
√
テンシャルは原点からの距離 s = x2 + y 2 のみに依存するものとする.
(1) 質点の座標を二次元極座標
x = s cos ϕ, y = s sin ϕ
(1.32)
を使って表し,質点の運動方程式を (s, ϕ) を用いて書け.
(2) 角運動量 Lz = m(xy˙ − y x)
˙ を (s, ϕ) を用いて書け.また,問題 (1) の結果より Lz が保存することを示せ.
(3) 運動エネルギー T = m
˙ 2 + y˙ 2 ) を (s, ϕ) を用いて表せ.また,問題 (1) の結果より力学的エネルギー
2 (x
E = T + U が保存することを示せ.
【1-1-b】質量 m の質点が中心力ポテンシャル U (r) による力を受けながら運動している.
(1) 質点の座標を三次元極座標
x = r cos ϕ sin θ, y = r sin ϕ sin θ, z = r cos θ
(1.33)
を使って表し,質点の運動方程式を (r, θ, ϕ) を用いて書け.
(2) 角運動量 Lz = m(xy˙ − y x)
˙ を (r, θ, ϕ) を用いて書け.また,問題 (1) の結果より Lz が保存することを
示せ.
(3) 運動エネルギー T =
m
˙2
2 (x
+ y˙ 2 + z˙ 2 ) を (r, θ, ϕ) を用いて表せ.また,問題 (1) の結果より力学的エネル
ギー E = T + U が保存することを示せ.
質点系の運動
【1-1-c】N 個の質点から構成される質点系に関して,以下の問いに答えよ.ただし,i 番目の質点の質量を
mi ,その位置ベクトルを ri とする (i = 1, 2, · · · , N ).また,i 番目の質点に働く外力を Fex
i ,j 番目の質点が
i 番目の質点に及ぼす内力を Fij とする.
(1) 以下の関係式が成り立つことを示せ.
N
∑
mi ¨ri =
i=1
N
∑
Fex
i
(1.34)
i=1
この関係式を導出する際に用いた内力に対する条件を明記せよ.
∑N
∑N
(2) 質点系の角運動量は L = i=1 (mi ri × r˙ i ) で与えられ,質点系に働く外力のモーメントは N = i=1 (ri × Fex
i )
で与えられる.質点間に働く内力が中心力,つまり Fij = F (rij )ˆ
rij であれば,
d
L=N
dt
(1.35)
が成り立つことを示せ.
(3) 保存力の場合,系の力学的エネルギーが保存すること,つまり
dE
=0
dt
が成り立つことを示せ.
18
(1.36)
1.2
,Ài»ÁCÊ)ÀÇ VÉ©¾FÀÀ¾½ ¿
P£¾
ªx³É̺¥Ë®¼ª0¾¬¾¥¢
拘束条件がある場合の運動
mg!
mg
(b)
(a)
図 1.2: 拘束条件がある場合の運動の例 (a) 振子の運動 (b) 滑らかな斜面の上の運動
実際の物理系では運動に様々な制限が課せられていることが多い.例えば振子の問題では糸の長さが一定
という条件が課せられる.また,滑らかな斜面の上での質点の運動では,質点は面の表面だけを運動するよ
うに制限される.
y}
x}
l
!
(x,y)
mg
図 1.3: 振り子の運動
拘束条件の与え方にはいろいろな種類があるが,ここでは拘束条件が質点の座標変数 {xi } に対する独立な
K 個の関係式
fi (x1 , x2 , · · · , x3N , t) = 0,
i = 1, 2, · · · , K
(1.37)
によって与えられる場合を考える.このような拘束をホロノミック(holonomic)な拘束と呼ぶ.拘束条件
を満たす点 {xi } の集まりは 3N 次元空間における曲面(超曲面)を作る.例えば,図 1.3 の振子の運動にお
ける,糸の長さが一定という条件は
x2 + y 2 + z 2 = l2 ⇒ x2 + y 2 + z 2 − l2 = 0
(1.38)
と表すことができる. この条件を満たす点の集まりは球面を作る.また,質点の運動が何らかの理由により
xy 平面内に限られる場合は,さらにもう1つの拘束条件
z=0
が課せられる.このとき拘束条件を満たす点の集まりは円を作る.
19
(1.39)
N 個の質点系の運動は 3N 個の座標変数によって表される.しかし, 運動に上のような拘束条件が付く場
AIJ
合には, 運動の自由度は
n = 3N − K となる.このとき,ある適当な n 個の独立変数 {qi } を使って {xi } を
表すことができる.例えば単振子の二次元的な運動の場合は拘束条件が二つ(
(1.38) 式と (1.39) 式)なので
ÀƼ»±Ë{XiÏm§È¦çgÀµÅ AIJÁè¹¼
自由度は n = 3 − 2 =±Ëª
1 である.よって1つの独立変数,例えば振子の振れ角,によって質点の座標を表す
o¿ ÀAIJÀ'!¿zyÏB5±ËÀÁ´Ìc
ことができる.
°¬¾¥ç
F’!
!f
"r
f (r) = 0
f (r) = 0
"r
F!
(a)
(b)
図 1.4: 拘束条件を満たす運動
簡単のため,時間に依存しない一つの拘束条件
f (x1 , x2 , · · · , x3N ) = 0
(1.40)
のもとで運動する質点系を考えよう.拘束条件を満たしながら {xi } を微小変化させて {xi + δxi } としたと
き,関数 f の値はこの微小変換に対して変化しないので
3N
∑
∂f
δxi = 0
∂xi
i=1
(1.41)
r = (x1 , x2 , · · · , x3N )
(1.42)
∇f = (∂f /∂x1 , ∂f /∂x2 , · · · , ∂f /∂x3N )
(1.43)
∇f · δr = 0
(1.44)
δf =
である.これは 3N 次元のベクトルを
3N 次元の gradient を
と書けば,
と書くことができる.図 1.4(a) に示すように,これは,拘束条件に従う運動の場合の微小変位が f = 0 で決
まる曲面(拘束面)の法線ベクトルと直交することを表している.質点には,図 1.4(b) に示す様に,重力の
ような外から受ける力 F の他に,面からの抗力や振子の糸の張力のように質点を拘束するための力 F′ が働
いている.したがって,Newton 運動方程式は
mi
d2 xi
= Fi + Fi′
dt2
(1.45)
となる.滑らかな面からの抗力や振子の糸の張力は拘束面に垂直に (法線方向に) 働く.そこで,より一般的
に拘束力 F′ が拘束面に垂直に働く場合を考えることにする.このとき拘束力と拘束条件を満たすような微小
変位は直交する.つまり
3N
∑
δxi Fi′ = δr · F′ = 0
(1.46)
i=1
である.これは,拘束力が系に仕事をしないことを表す.このような拘束を滑らかな拘束と呼ぶ.今後は滑
らかな拘束の場合のみを考えることにする.
20
演習問題
【1-2-a】単振り子の運動方程式を,以下の手続きによって導出せよ.
(1) 図 1.3 のよう に,質点には重力 mg の他に張力 F′ がかかっているために,糸の長さが一定に保たれてい
る。直交座標による運動方程式は
m¨
x = Fx′ , m¨
y = −mg + Fy′
(1.47)
で与えられる.この問題を直交座標のまま扱うのは面倒なので,振り子の糸の長さ r と振れ角 θ を変数とし
て用いる.運動方程式を書き換えると,以下を得ることを示せ.
˙ 2 ] = mg cos θ − F ′ ,
m[¨
r − r(θ)
¨ = −mg sin θ
m(2r˙ θ˙ + rθ)
(1.48)
上の第一式は動径方向の運動方程式を表し,第二式は角度方向の運動方程式を表す.
(2) 糸の長さが一定(r = l)である条件より,張力の大きさ F ′ を θ, θ˙ を使って表せ.
(3) 角度方向の運動方程式に糸の長さ一定の条件 (r = l) を代入することにより,θ に対する運動方程式を導け.
(4) 微小振動 θ ≪ 1 を仮定することにより運動方程式を線形化し,その解を求めよ.
21
1.3
仮想仕事の原理
Newton 運動方程式から拘束条件がある場合の運動を求める場合,以下の二つの困難が生じる.第一に,座
標 xi が拘束の条件式 fi = 0 によって関係付けられるために,3N 個の運動方程式はすべてが独立なわけで
はなくなる.第二に,拘束力は最初から与えられるわけではなく拘束条件を満たすように決めなければなら
ない.また,拘束条件が無い場合であっても直交座標以外の座標変数を使う場合や,質点系の問題で自由度
が大きい場合などは運動方程式が複雑になる.このような場合の運動法則を定式化するには,見方を変えて,
仮想仕事の原理とダランベールの原理の考え方から運動方程式を見直すと便利である.
F1!
F2!
F3!
F= F1+ F2 + F3
=0!
=0
»¤Ëç¹ÃÊ
ª¹Ê!¸º¥ËZ=»Á<À8/¾;(¿-°º;
ªÖ῾Ëç
図 1.5: 質点のつり合いの条件
®ÌÏ;
À\¼¥¦ç
まず,簡単な場合として一つの質点が力を受けている場合のつり合いの条件を考えよう.質点に作用する
力の総和をを F とすると,質点が静止しているときは力がつり合っているので F = 0 である.この状態を表
すのに,質点の位置 r を仮想的に δr だけ動かしてみることを考える.
(ここで言う仮想的な変化とは,与え
られた瞬間 t において座標を任意に変化させることを意味し,時間間隔 dt の間に系に起こる実際の変化と明
確に区別しなければならない.
)つり合いの条件より,このときなされる仮想的な仕事 δW は
δW = δr · F = 0
(1.49)
である.つまり,力がつり合っている状態では,任意の微小な仮想変位に対して仮想仕事がゼロになる.こ
れを仮想仕事の原理と呼ぶ.
$r!
F’!
F!
図 1.6: 拘束条件がある場合の質点のつり合いの条件
AIJÏUµ±È¦¾<À8/¾;(¿-°º;
ª
ÖỤËç
振子の運動のように,拘束力によって拘束条件が課せられている場合について考えてみよう.図 1.6 に示
す様に,この場合は重力のような通常の力 F の他に,糸の張力のような拘束力 F′ が質点に作用している.こ
の場合,仮想仕事の原理は次のように書ける.
δW = δr · (F + F′ ) = 0
(1.50)
ここで,仮想変位 δr を拘束条件を満たすような変位に限ることにする.滑らかな拘束の場合, 拘束力 F′ は仮
22
想変位 δr に直交するので,仮想仕事の原理は
δW = δr · F = 0
(1.51)
と拘束力を含まない形に書ける.つまり,拘束力がある場合のつり合いの条件は「拘束条件を満たすような
Àm§GÏ{Xª°º¥ËZ=¿B5°È¦çZ=»
任意の仮想変位に対して仮想仕事がゼロである」と書くことが出来る.
ÁÀ#ÁÖá»Á¾¬{XÁGc4
F
¿7¸º°º¥Ëç®ÌÏ
>:
)=0
¨r
ÀȦ¿H«D§Ë¼Ï{X¿
]±Ës©Àå>:æ¼m§Ë
®¼ªKËç
®ÀȦ¿ Z=Æ ]±Ë¼>
:ª¹Ê!¸µZ=¼s¾±®¼ª
KËç
n^q
×ßâÛãàÀ\
図 1.7: 運動状態に対するダランベールの原理の考え方.自由落下している状態では重力と慣性力がつり合っ
ていると考えられる.
仮想仕事の原理の考え方を,質点が運動している状態に拡張しよう.運動状態では力の和はゼロではなく,
質点は運動方程式 m¨
r = F に従って運動している.これを
F + (−m¨r) = 0
(1.52)
のように書き換えると −m¨
r を質点に作用する見かけ上の力(慣性力)と考えることが出来る.このように,
運動状態も,作用する力と慣性力がつり合った状態と見なすことが出来る.これをダランベールの原理と呼
ぶ.ダランベールの原理によって,仮想仕事の原理を運動状態に拡張することができる.すなわち,運動状
態では質点の仮想変位に対して
δW = δr · [F + (−m¨r)] = 0
(1.53)
が成り立っている.
(これも含めてダランベールの原理という場合もある.
)ここで再び,振子のような拘束さ
れた運動を考えよう.この場合は拘束力 F′ も含めて
δW = δr · [F + F′ + (−m¨r)] = 0
(1.54)
となる.しかし,仮想変位 δr を拘束条件を満たすような変位に限ることにすると,滑らかな拘束の場合は
δr · F′ = 0 より結局
δW = δr · [F + (−m¨r)] = 0
(1.55)
となって拘束力を含まない形に運動法則を表すことができる.
N 個の質点系の運動の場合についても同様に仮想仕事の原理を考えることができる.N 質点系の運動方程
式 mi x
¨i = Fi + Fi′ (ただし Fi′ は拘束力を表す)を書き直して
Fi + Fi′ + (−mi x
¨i ) = 0
(1.56)
とすれば,これは i 番目の質点に作用する力と慣性力がつり合った条件を表す.ここで仮想変位 {δxi } を考
えると仮想仕事は
δW =
3N
∑
δxi (Fi + Fi′ − mi x
¨i ) = 0
(1.57)
i=1
となる.拘束条件を満たす仮想変位の場合は
δW =
∑3N
i=1
3N
∑
δxi Fi′ = 0 が成り立つため拘束力に関する項が消えて
δxi (Fi − mi x
¨i ) = 0
i=1
となる.以上によって,N 質点系の運動法則を拘束力を含まない形に表すことができた.
23
(1.58)
【例題 1-3-a】
振子(図 1.3 を見よ)の運動方程式を仮想仕事の原理を使って導出せよ.
【解答】
質点の座標 (x, y) を振れ角 θ で表すと
x = l sin θ, y = −l cos θ
(1.59)
となる.拘束条件(l = 一定)を満たす仮想変位は
δx = lδθ cos θ, δy = lδθ sin θ
(1.60)
と書ける.また,拘束条件を満たしながら運動している場合の速度と加速度は
˙ 2 sin θ
x˙ = lθ˙ cos θ, x
¨ = lθ¨ cos θ − l(θ)
(1.61)
˙ 2 cos θ
y˙ = lθ˙ sin θ, y¨ = lθ¨ sin θ + l(θ)
(1.62)
と書ける.一方,質点に作用する重力は
F = −mgˆ
y
(1.63)
である.
{
F · δr = Fy δy = (−mgl sin θ)δθ
}
˙ 2 sin θ]l cos θ + [lθ¨ sin θ + l(θ)
˙ 2 cos θ]l sin θ δθ = ml2 θδθ
¨
m¨r · δr = m [lθ¨ cos θ − l(θ)
(1.64)
(1.65)
これらを仮想仕事の原理を表す式 (F − m¨
r) · δr に代入すると
¨
(−mgl sin θ − ml2 θ)δθ
=0
(1.66)
となる.この式は任意の仮想変位 δθ に対して成りたたなければならないので,
を得る.両辺を ml で割れば
mlθ¨ = −mg sin θ
(1.67)
g
θ¨ = − sin θ
l
(1.68)
となる.
24
【例題 1-3-b】図 1.8 のように,支点が動く振子の運動方程式を仮想仕事の原理を使って導出せよ.
y
x
(X(t), Y (t))
l
θ
(x, y)
mg
図 1.8: 支点が動く振子の運動
【解答】
振子の支点の位置座標 (X(t), Y (t)) が時間によって変化する場合を考える.振れ角を使って質点の座標を
表すと
x = X + l sin θ, y = Y − l cos θ
(1.69)
まず,ある時刻 t において拘束条件を満たす仮想変位は,支点が動かない場合と同様に
δx = lδθ cos θ, δy = lδθ sin θ
(1.70)
である.また,加速度には支点の加速度が加わるので
˙ 2 sin θ,
¨ + lθ¨ cos θ − l(θ)
x
¨=X
˙ 2 cos θ
y¨ = Y¨ + lθ¨ sin θ + l(θ)
(1.71)
となる.よって
¨
¨ cos θ + Y¨ sin θ)l + l2 θ]δθ
m¨r · δr = m[(X
となり,仮想仕事の原理を表す式は
{
}
¨ δθ = 0
¨ cos θ + Y¨ sin θ)l + l2 θ]
−mgl sin θ − m[(X
(1.72)
(1.73)
となる.従って,求める運動方程式は
¨ cos θ + Y¨ sin θ)
mlθ¨ = −mg sin θ − m(X
(1.74)
¨ cos θ + Y¨ sin θ)
lθ¨ = −g sin θ − (X
(1.75)
となる.両辺を m で割れば
となる.
25
1.4
Lagrange 方程式
前節では仮想仕事の原理(又はダランベールの原理)(1.55) 式によって力学の基本法則を表した.この定
式化では(滑らかな拘束の場合は)拘束力が式の中に入ってこないので,拘束条件がある場合の運動方程式
を機械的に導出することができる.しかし,(1.55) 式は直交座標を使って表されているため,実際に仮想仕
事の原理 (1.55) から運動方程式を導出するためには,直交座標を適当な新しい座標で書き直す手間が必要と
なる.例えば例題において振子の運動方程式を導出する際には,x, y を振れ角 θ で表し,仮想変位や加速度
を θ で書き直す必要があった.この節で導出する Lagrange 方程式では,どのような座標系を使っても力学法
則を同じ形で表すことができる.
1.4.1
一般化座標
振子の運動の場合,拘束条件(x2 + y 2 = l2 = 一定)に従う運動を記述するために,振れ角 θ を使って x, y
を表した.一般に,N 個の質点系の運動は 3N 個の座標変数 (x1 , · · · , x3N ) によって記述されるのだが,K
個の拘束条件がある場合は,n = 3N − K 個の独立変数によって直交座標変数を表すことができる.このと
きの n を系の運動の自由度という.系の運動を記述するために,直交座標に限らず一般に適当な変数を使う
とき,これを一般化座標と呼ぶ.たとえば極座標,相対(重心)座標,振子の場合の振れ角 θ などが一般化
座標の例として挙げられる.今後は,一般化座標を q1 .q2 , · · · , qn で表すことにしよう.拘束条件を満たす直
交座標 {xi } は一般化座標 {qi } の関数として与えられる.
xi = xi (q1 , q2 , · · · , qn , t)
(1.76)
拘束条件に従う仮想変位 δxi は一般化座標の仮想変位 δqi を使って
δxi =
n
∑
∂xi
j=1
∂qj
δqj
(1.77)
と表される.また,速度を一般化座標を用いて表すと
x˙ i =
n
∑
∂xi
j=1
∂qj
q˙j +
∂xi
∂t
(1.78)
と書ける.
1.4.2
Lagrange 方程式の導出
前節で説明したように,N 質点系の運動方程式を仮想仕事の原理を用いて表すと
δW =
3N
∑
δxi (Fi − mi x
¨i ) = 0
(1.79)
i=1
となる.ただし δxi は拘束条件に従う任意の仮想変位である.ここで仮想変位を (1.77) 式によって一般化座
標を使って表すと仮想仕事の原理は
δW =
3N ∑
n
∑
∂xi
δqj = 0
(Fi − mi x
¨i )
∂qj
i=1 j=1
(1.80)
と書ける.ここで既知の力 Fi が保存力であり,ポテンシャル U によって Fi = −∂U/∂xi で与えられる場合
を考える.このとき (1.80) 式は
)
3N ∑
n (
∑
∂U ∂xi
mi x
¨i +
δqj = 0
∂xi ∂qj
i=1 j=1
26
(1.81)
となる.ただし,後の都合を考えて項の順番と符号を変えている.
まず,(1.81) 式の第一項目が
3N ∑
n
∑
∑
∂xi
mi x
¨i
δqj =
∂qj
i=1 j=1
j=1
n
[(
d ∂
∂
−
dt ∂ q˙j
∂qj
)∑
3N
i=1
]
1
2
mi x˙ i δqj
2
(1.82)
と書けることを示そう.まず
[ (
)
(
)]
3N ∑
n
∑
∂xi
d
∂xi
d ∂xi
mi x
¨i
δqj =
mi
x˙ i
− x˙ i
δqj
∂qj
dt
∂qj
dt ∂qj
i=1 j=1
i=1 j=1
3N ∑
n
∑
である.後に示すように
∂ x˙ i
∂xi
=
,
∂qj
∂ q˙j
(
d
dt
∂xi
∂qj
)
=
∂ x˙ i
∂qj
(1.83)
(1.84)
が成り立つので
[ (
)
)]
(
3N ∑
n
∑
∂xi
d
∂ x˙ i
∂ x˙ i
mi x
¨i
δqj =
mi
x˙ i
− x˙ i
δqj
∂qj
dt
∂ q˙j
∂qj
i=1 j=1
i=1 j=1
3N ∑
n
∑
=
3N ∑
n
∑
[
mi
i=1 j=1
1 d
2 dt
(
∂ 2
x˙
∂ q˙j i
)
1
−
2
(
∂ 2
x˙
∂qj i
]
)]
δqj
[(
)∑
3N
n
∑
d ∂
∂
1
=
−
mi x˙ 2i δqj
dt
∂
q
˙
∂q
2
j
j
j=1
i=1
(1.85)
となる.(1.84) 式は以下のように示すことができる.
x˙ i =
(
n
∑
∂xi
∂xi
q˙k +
∂qk
∂t
(1.86)
k=1
n
∑
∂xi
∂xi
q˙k +
∂qk
∂t
)
n
n
∑
∑
∂xi
∂xi ∂ q˙k
∂xi
=
δkj =
∂qk ∂ q˙j
∂qk
∂qj
k=1
k=1
k=1
[
]
(
) ∑
(
)
(
)
)
n (
n
∂ x˙ i
d ∂xi
∂
∂xi
∂ ∂xi
∂ ∑ ∂xi
∂xi
=
=
q˙k +
=
q˙k +
dt ∂qj
∂qk ∂qj
∂t ∂qj
∂qj
∂qk
∂t
∂qj
k=1
k=1
∑3N 1
運動エネルギーの表式 T = i=1 2 mi x˙ 2i を使って (1.82) 式を表すと
∂
∂ x˙ i
=
∂ q˙j
∂ q˙j
3N ∑
n
∑
=
∑
∂xi
mi x
¨i
δqj =
∂qj
i=1 j=1
j=1
n
[(
d ∂
∂
−
dt ∂ q˙j
∂qj
) ]
T δqj
(1.87)
(1.88)
(1.89)
となる.
次に,(1.81) 式の第二項目は
n
3N ∑
n
∑
∑
∂U
∂U ∂xi
δqj =
δqj
∂xi ∂qj
∂qj
j=1
i=1 j=1
(1.90)
と書ける.
以上をまとめると,仮想仕事の原理は
n [(
∑
j=1
d ∂
∂
−
dt ∂ q˙j
∂qj
)
T+
]
∂U
δqj = 0
∂qj
(1.91)
と書くことができる.通常,ポテンシャル U は座標 {xi } のみの関数として与えられ,速度 {xi } には依存し
ない.
(時間 t に陽に依存することはあり得る.
)したがって U を一般化座標 {qj } で表したときも,{q˙j } には
依存しない関数として与えられる.そこで,Lagrangian(Lagrange 関数)を
L=T −U
27
(1.92)
によって定義すれば ∂L/∂ q˙j = ∂T /∂ q˙j より (1.91) 式は
)
n (
∑
∂L
d ∂L
−
δqj = 0
dt ∂ q˙j
∂qj
j=1
(1.93)
となる.仮想変位は δq1 , δq2 , · · · , δqn について互いに独立にとれるので,(1.93) 式が恒等的に成り立つために
は δqj の係数部分が全ての j についてそれぞれ 0 になる必要がある.この条件より
d ∂L
∂L
−
=0
dt ∂ q˙j
∂qj
(1.94)
を得る.この方程式を Lagrange 方程式と呼ぶ. このように Lagrangian によって力学を定式化するやり方
を Lagrange 形式と呼ぶ.
Lagrange 方程式は座標系の選び方によらず (1.94) の形をとる.滑らかな拘束の場合,拘束力が方程式に現
れないので,拘束条件に従う運動を扱う場合には特に威力を発揮する.また,質点系の運動を Newton 方程
式で表す場合,例えば N 個の質点系の運動は 3N 個の連立方程式で記述されるのに対し,Lagrange 形式で
は一つの関数 Lagrangian を与えれば系の運動が決まる.よって,Lagrange 形式では自由度が大きな系の運
動を見通しよく表すことができる.
1.4.3
Lagrange 方程式の例
質点の Lagrange 方程式
ポテンシャル U (r) による力を受けながら運動する質量 m の質点の Lagrangian を直交座標を使って表すと
T (˙r) =
より
L(r, r˙ ) = T − U =
m
m 2
r˙ = (x˙ 2 + y˙ 2 + z˙ 2 )
2
2
m 2
m
r˙ − U (r) = (x˙ 2 + y˙ 2 + z˙ 2 ) − U (x, y, z)
2
2
(1.95)
(1.96)
となる.Lagrange 方程式は
d ∂L ∂L
−
=0
dt ∂ x˙
∂x
d ∂L ∂L
−
=0
dt ∂ y˙
∂y
d ∂L ∂L
−
=0
dt ∂ z˙
∂z
(1.97)
(1.98)
(1.99)
であるが,
d ∂L
d
∂L
∂U
= mx˙ = m¨
x,
=−
dt ∂ x˙
dt
∂x
∂x
d
∂L
∂U
d ∂L
= my˙ = m¨
y,
=−
dt ∂ y˙
dt
∂y
∂y
d ∂L
d
∂L
∂U
= mz˙ = m¨
z,
=−
dt ∂ z˙
dt
∂z
∂z
(1.100)
(1.101)
(1.102)
より
∂U
=0
∂x
∂U
m¨
y+
=0
∂y
m¨
x+
(1.103)
(1.104)
∂U
=0
∂z
(1.105)
m¨r + ∇U = 0
(1.106)
m¨
z+
を得る.ベクトルの形で書くと
28
となる.これは保存力の場合の Newton 運動方程式と全く同じである.
質点系の Lagrange 方程式
N 個の質点からなる系の Lagrangian を直交座標を用いて表す.質点系のポテンシャルが U (r1 , r2 , · · · , rN )
によって与えられているものとする.
T =
N
∑
mi
i=1
より
L=T −U =
2
i=1
N
∑
mi
i=1
N
∑
mi
2
r˙ 2i =
r˙ 2i − U =
2
(x˙ 2i + y˙ i2 + z˙i2 )
N
∑
mi
i=1
2
(x˙ 2i + y˙ i2 + z˙i2 ) − U
(1.107)
(1.108)
Lagrange 方程式は
∂L
d ∂L
−
=0
dt ∂ x˙ i
∂xi
(i = 1, 2, · · · , N )
(1.109)
d ∂L
∂L
−
=0
dt ∂ y˙ i
∂yi
(i = 1, 2, · · · , N )
(1.110)
d ∂L
∂L
−
=0
dt ∂ z˙i
∂zi
(i = 1, 2, · · · , N )
(1.111)
であるが,
d
∂L
∂U
d ∂L
= mi x˙ i = mi x
¨i ,
=−
dt ∂ x˙ i
dt
∂xi
∂xi
(1.112)
d
∂L
∂U
d ∂L
= mi y˙ i = mi y¨i ,
=−
dt ∂ y˙ i
dt
∂yi
∂yi
(1.113)
d ∂L
d
∂L
∂U
= mi z˙i = mi z¨i ,
=−
dt ∂ z˙i
dt
∂zi
∂zi
(1.114)
より
mi x
¨i +
∂U
=0
∂xi
(1.115)
mi y¨i +
∂U
=0
∂yi
(1.116)
mi z¨i +
∂U
=0
∂zi
(1.117)
ベクトルの形で書くと
mi ¨ri + ∇ri U = 0
(1.118)
となる.これは保存力の場合の質点系の Newton 運動方程式と全く同じである.
一般化座標を用いた場合の Lagrange 方程式
以上によって Lagrange 方程式が通常の直交座標による Newton 運動方程式を再現することを確かめた.し
かしながら,Lagrange 方程式は直交座標以外の一般化座標を用いる場合に,より威力を発揮する.一般化座
標を用いた場合の Lagrange 方程式は演習問題で扱う.
29
演習問題
【問題 1-4-a】質量 m,糸の長さが l の振り子の運動に対して,角度 θ を用いて Lagrangian を与えよ.また,
Lagrange 方程式より θ に対する運動方程式を導け.
【問題 1-4-b】1個の質点が xy 平面内を2次元的に運動する場合を考える.このとき2次元極座標 (s, ϕ) を
使って,Lagrangian を書き下し,それぞれの変数に対する運動方程式を導け.ただし,質点は原点からの距
√
離 s = x2 + y 2 のみに依存するポテンシャル中を運動しているものとする.
【問題 1-4-c】3次元極座標 (r, θ, ϕ) を使って1個の質点の運動に対する Lagrangian を書き下し,それぞれ
の変数に対する運動方程式を導け.ただし,質点は原点からの距離 |r| = r のみに依存するポテンシャル中を
%'&CB537-@2
運動しているとする.
:=+8($ ( : *CB8# :-37@2":A,?) 6;9:$/ A604
【問題 1-4-d】図のように、自然長 l0 ,弾性率 k の軽いバネに質量 m の質点がつながれた一様重力下の振子
A,=)<2(
=> 6 8
1?!
を考える。 A.)
図 1.9: ばねでつながれた振子
(1) 角度 θ とばねの長さ l を独立変数として Lagrangian を与えよ。
(2)Lagrange 方程式より θ と l に対する運動方程式を導け。
(3) 上式の平衡解(θ˙ = 0, l˙ = 0 を満たす解)を求めよ.また,平衡状態まわりの微小振動を仮定して Lagrangian
を揺らぎの二次まで展開せよ.
(4) 前問の Lagrangian より線形化された方程式を導き,その解を求めよ.
【問題 1-4-e】質量 m1 の質点 1 と m2 の質点 2 が相互作用しながら運動している.これらの質点の位置座標
を r1 , r2 とする.この系の Lagrangian を重心座標 R = (m1 r1 + m2 r2 )/(m1 + m2 ) と相対座標 r = r1 − r2
を使って与え,運動方程式を導け.ただし相互作用ポテンシャルは相対座標のみに依存する.
【問題 1-4-f】二原子分子を長さ l の棒でつながれた2つの質点とみなして、その運動を考える。この系の
Lagrangian を重心座標 R = (m1 r1 + m2 r2 )/(m1 + m2 ) と相対座標 r = r1 − r2 を使って与え、運動方程式を
導け。相対座標については、質点間の距離が一定(r = l)という拘束条件のもとで、3次元極座標を用いよ。
30
【問題 1-4-g】質量 m1 ,m2 の二重振り子の運動を考える.それぞれの糸の長さを l1 ,l2 とし,図のように
x-y 座標系を設定する.また,それぞれの振り子の糸と y 軸との角度を ϕ1 ,ϕ2 とし,重力加速度は g とする.
このとき以下の問いに答えよ.
(1) ϕ1 ,ϕ2 を独立変数として Lagrangian を導け.
(2) 微小振動 (ϕ1 ≪ 1,ϕ2 ≪ 1) を仮定して,問 (1) で導いた Lagrangian を ϕ1 , ϕ2 の二次まで展開せよ.
(3) 問 (2) で導いた微小振動の Lagrangian から Lagrange 方程式を導出せよ.
(4) 微小振動の解として ϕj = Aj e−iωt ,(j = 1, 2) を仮定する.ただし Aj は定数である.このとき微小振動
の角振動数 ω を求めよ.
y
x
φ1
l1
m1
φ2
l2
m2
図 1.10: 二重振り子
【問題 1-4-h】なめらかな板にあけた小穴に全長 l の糸を通し,板上の糸の端に質量 m1 の質点をつけて板上
におき,板下の糸の端に質量 m2 の質点をつけて鉛直に垂れ下げる.ただし,小穴における摩擦は無視でき
るとし,また重力加速度を g とする.このとき,この系の Lagrange 方程式を導け.
31
1.5
時間に依存する拘束条件
前節で導出した Lagrange 方程式は,拘束条件が時間に陽に依存する場合や直交座標と一般化座標の変換
関係が時間に陽に依存する場合でも使える.この節では拘束条件が時間に陽に依存する場合を扱い,次節で
座標変換が時間に陽に依存する場合を扱おう.
【例題 1-5-a】図 1.8 のように,振り子の支点の位置が時間変化する場合を考える.ただしここでは支点が x
軸方向にのみ運動する場合を考え,支点の x 座標は適当な関数 F (t) によって
X(t) = F (t)
(1.119)
で与えられるものとする.この場合の拘束条件は
[x − F (t)]2 + y 2 − l2 = 0
(1.120)
と書くことができる.振子の振れ角 θ を一般化座標として用いて Lagrange 方程式を導け.
bf 【解答】位置座標 x, y を角度 θ を使って表すと
x = l sin θ + F (t), y = −l cos θ
(1.121)
となる.これより
dF
, y˙ = lθ˙ sin θ
x˙ = lθ˙ cos θ +
dt
[(
]
[
)2 (
(
)2 ]
)2
m 2 ˙2
dF
m
dF
dF
˙
˙
˙
=
l θ + 2lθ cos θ
T =
lθ cos θ +
+ lθ sin θ
+
2
dt
2
dt
dt
[
]
(
)2
m 2 ˙2
dF
dF
L=
l θ + 2lθ˙ cos θ
+ mgl cos θ
+
2
dt
dt
(1.122)
(1.123)
(1.124)
となる.Lagrange 方程式は
(
)
d ∂L
d
dF
dF
d2 F
2˙
= m l θ + l cos θ
= ml2 θ¨ − mlθ˙ sin θ
+ ml cos θ 2
dt ∂ θ˙
dt
dt
dt
dt
(1.125)
dF
∂L
= −mlθ˙ sin θ
− mgl sin θ
∂θ
dt
(1.126)
より
ml2 θ¨ + ml cos θ
となる.両辺を ml で割ると
lθ¨ + cos θ
d2 F
+ mgl sin θ = 0
dt2
d2 F
+ g sin θ = 0
dt2
(1.127)
(1.128)
となる.
【例題 1-5-b】振子の糸の長さ l が時間の関数 l(t) として時間変化する場合を考える.この場合の拘束条件は
x2 + y 2 − l2 (t) = 0
(1.129)
と書くことができる.振子の振れ角 θ を一般化座標として用いて Lagrange 方程式を導け.
【解答】位置座標 x, y を角度 θ を使って表すと
x = l(t) sin θ, y = −l(t) cos θ
32
(1.130)
となる.これより
T =
m
2
[(
となる.Lagrange 方程式は
x˙ = lθ˙ cos θ + l˙ sin θ, y˙ = lθ˙ sin θ − l˙ cos θ
)2 (
)2 ] m (
)
˙
˙
˙
˙
lθ cos θ + l sin θ + lθ sin θ − l cos θ
=
l2 θ˙2 + l˙2
2
)
(
m 2 ˙2 ˙2
L=
l θ + l + mgl cos θ
2
(1.131)
(1.132)
(1.133)
d ∂L
d ( )
= m l2 θ˙ = ml2 θ¨ + 2mll˙θ˙
dt ∂ θ˙
dt
(1.134)
∂L
= −mgl sin θ
∂θ
(1.135)
ml2 θ¨ + 2mll˙θ˙ + mgl sin θ = 0
(1.136)
より
となる.両辺を ml2 で割ると
2
g
θ¨ + l˙θ˙ + sin θ = 0
l
l
を得る.特に微小振動 θ ≪ 1 を仮定すれば sin θ ≃ θ より
2
g
θ¨ + l˙θ˙ + θ = 0
l
l
となる.
33
(1.137)
(1.138)
演習問題
【問題 1-5-a】例題 1-5-a の支点が動く振り子について,F (t) の関数形が具体的に
F (t) = A sin ωt
(1.139)
で与えられている場合を考える.
(1)Lagrange 方程式より θ に対する運動方程式を求めよ.
(2) 微小振動を仮定して Lagrangian を θ の二次まで展開し,θ に対する線形化された運動方程式を導け.ま
た,その解を求めよ.
【問題 1-5-b】支点が y 方向に振動する振子を考えて,前問と同様に運動方程式を導け.また,微小振動の解
を求めよ.
【問題 1-5-c】糸の長さが
l(t) = l0 (1 + ϵ cos Ωt)
(1.140)
のように周期的に振動する振子の運動方程式を求めよ.ただし,微小振動を仮定して例題 1 で求めた運動方
程式 (1.138) を用いてよい.また,ϵ ≪ 1 として方程式を ϵ の一次まで展開せよ.これはブランコの原理を理
解するための簡単化されたモデルと考えることができる.得られた方程式の解を求めることは容易では無い
が,Ω = 2ω のときには共鳴が起こり振動の振幅が時間と共に増大することを示せる.
34
1.6
加速度系での運動方程式
Lagrange 方程式は,座標変換が時間に陽に依存する場合でも使える.ここでは,原点が加速度運動する場
合と,座標軸が一定の角速度で回転する場合を考える.
1.6.1
原点が加速度運動する場合
図 1.11: 加速度運動する座標系.
原点 O を中心とする直交座標系 O−xyz をとり,これは慣性系であるとする.この慣性系に対して並進運
動する別の座標系 O′ − x′ y ′ z ′ を考える.時刻 t における原点 O′ の,O−xyz 系における位置座標を R(t) =
(X(t), Y (t), Z(t)) とする.質点の座標系 O−xyz における位置座標を r(t) = (x(t), y(t), z(t)),O′ − x′ y ′ z ′ に
おける位置座標を r′ (t) = (x′ (t), y ′ (t), z ′ (z)) とすると
r′ (t) = r(t) − R(t)
(1.141)
という関係がある.この時間微分をとると速度の関係式
˙
r˙ ′ = r˙ − R
(1.142)
を得る.O−xyz 系における Lagrangian を
L=
m 2
m
r˙ − U (r) = (x˙ 2 + y˙ 2 + z˙ 2 ) − U (x, y, z)
2
2
(1.143)
とすると,O′ − x′ y ′ z ′ 系における Lagrangian は
L=
m ′
˙ 2 − U = m (˙r′2 + 2˙r′ · R
˙ +R
˙ 2) − U
(˙r + R)
2
2
(1.144)
となる.Lagrange 運動方程式は
¨
m¨r′ = −∇′ U − mR
(1.145)
となる.今の場合,∇U = ∇′ U である.
O′ − x′ y ′ z ′ 系が O−xyz 系に対して等速直線運動をしている場合,つまり O′ − x′ y ′ z ′ 系も慣性系である場
˙ が定ベクトルとなり R
¨ = 0 となるので運動方程式の形は変わらない.一方,O′ が加速度運動して
合は,R
′
′ ′ ′
¨ が余分に働いているように見える.このような見
いる場合,O − x y z 系における運動方程式では力 −mR
かけ上の力は慣性力と呼ばれる.
35
回転座標系
1.6.2
時間に依存する座標変換として,回転座標系を考える.z 軸のまわりを角速度 ω で回転している座標系を
′ ′ ′
x y z とすると
x = x′ cos ωt − y ′ sin ωt
y = x′ sin ωt + y ′ cos ωt
z=z
(1.146)
′
である.この時間微分をとると
x˙ = x˙ ′ cos ωt − y˙ ′ sin ωt − ω(x′ sin ωt + y ′ cos ωt)
y = x˙ ′ sin ωt + y˙ ′ cos ωt + ω(x′ cos ωt − y ′ sin ωt)
z˙ = z˙ ′
(1.147)
となる.これを用いて運動エネルギーを x′ y ′ z ′ で表すと
x˙ 2 + y˙ 2 = [x˙ ′ cos ωt − y˙ ′ sin ωt − ω(x′ sin ωt + y ′ cos ωt)]2
+[x˙ ′ sin ωt + y˙ ′ cos ωt + ω(x′ cos ωt − y ′ sin ωt)]2
= (x˙ ′ cos ωt − y˙ ′ sin ωt)2 − 2ω(x′ sin ωt + y ′ cos ωt)(x˙ ′ cos ωt − y˙ ′ sin ωt) + ω 2 (x′ sin ωt + y ′ cos ωt)2
+(x˙ ′ sin ωt + y˙ ′ cos ωt)2 + 2ω(x′ cos ωt − y ′ sin ωt)(x˙ ′ sin ωt + y˙ ′ cos ωt) + ω 2 (x′ cos ωt − y ′ sin ωt)2
= x˙ ′2 cos2 ωt − 2x˙ ′ y˙ ′ cos ωt sin ωt + y˙ ′2 sin2 ωt + x˙ ′2 sin2 ωt + 2x˙ ′ y˙ ′ sin ωt cos ωt + y˙ ′2 cos2 ωt
+2ω(−x′ x˙ ′ sin ωt cos ωt − y ′ x˙ ′ cos2 ωt + x′ y˙ ′ sin2 ωt + y ′ y˙ ′ cos ωt sin ωt
+ x′ x˙ ′ cos ωt sin ωt + x′ y˙ ′ cos2 ωt − y ′ x˙ ′ sin2 ωt − y ′ y˙ ′ sin ωt cos ωt)
+ω 2 (x′2 sin2 ωt + 2x′ y ′ sin ωt cos ωt + y ′2 cos2 ωt + x′2 cos2 ωt − 2x′ y ′ cos ωt sin ωt + y ′2 sin2 ωt)
= x˙ ′2 + y˙ ′2 + 2ω(x′ y˙ ′ − y ′ x˙ ′ ) + ω 2 (x′2 + y ′2 )
(1.148)
より
m 2
(x˙ + y˙ 2 + z˙ 2 )
2
m
= [x˙ ′ cos ωt − y˙ ′ sin ωt − ω(x′ sin ωt + y ′ cos ωt)]2
2
+ [x˙ ′ sin ωt + y˙ ′ cos ωt + ω(x′ cos ωt − y ′ sin ωt)]2 + z˙ ′2
1
m
= (x˙ ′2 + y˙ ′2 + z˙ ′2 ) + mω(x′ y˙ ′ − y ′ x˙ ′ ) + mω 2 (x′2 + y ′2 )
2
2
となる.これより,回転座標系における Lagrangian として
T =
L=
m ′2
1
(x˙ + y˙ ′2 + z˙ ′2 ) + mω(x′ y˙ ′ − y ′ x˙ ′ ) + mω 2 (x′2 + y ′2 ) − U (x′ , y ′ , z ′ , t)
2
2
(1.149)
(1.150)
を得る.
Lagrange 方程式より x′ , y ′ , z ′ に対する運動方程式を導くと
∂U
+ mω 2 x′ + 2mω y˙ ′
∂x′
∂U
m¨
y ′ = − ′ + mω 2 y ′ − 2mω x˙ ′
∂y
∂U
m¨
z′ = − ′
∂z
となる.この運動方程式は以下のように書くこともできる.
m¨
x′ = −
(1.151)
(1.152)
(1.153)
m¨r′ = F + Fcent + FCoriolis
F = −∇′ U
Fcent = mω 2 (x′ , y ′ , 0) = −∇′ Ucent ,
FCorioulis = 2mω(y˙ ′ , −x˙ ′ , 0) = 2m(˙r′ × ω),
36
m 2 ′2
ω (x + y ′2 )
2
ω = ωˆ
z
Ucent = −
(1.154)
z = z′
s!
!
!
y′
ωt
y
x
ωt
x′
1
図 1.12: 回転座標系.
Fcent は遠心力,FCoriolis はコリオリ力と呼ばれる.これらは加速度運動する座標系を用いたために現れた見
かけの力,すなわち慣性力である.Ucent は遠心力ポテンシャルと呼ばれる.
ここで,
A = mω(−y ′ , x′ , 0),
Ueff = U + Ucent
∇ × A = 2mω
m
= U − ω 2 (x′2 + y ′2 )
2
(1.155)
(1.156)
とすると Lagrangian を簡潔に表すことができる.
L=
m ′2
(x˙ + y˙ ′2 + z˙ ′2 ) + A · r˙ ′ − Ueff
2
(1.157)
Lagrangian の第二項は速度に依存するポテンシャルの形をしており,ベクトル A はベクトルポテンシャル
と呼ばれる.
37
演習問題
【問題 1-6-a】航空機が速度
v(t) = v0 − gˆ
zt
(1.158)
で飛行するするとき,これを放物線飛行(またはパラボリックフライト)という.ここで v0 は定ベクトル
であり g は重力定数である.このような放物線飛行を行っている航空機内での質量 m 物体の Lagrangian を,
航空機内に固定された座標系を使って表し,運動方程式を導け.ただし,物体には一様な重力 −mgˆ
z のみが
働いているものとする.
【問題 1-6-b】質量 m の質点が時間に依存するポテンシャル
U (x, y, z, t) =
m
[k1 (x cos ωt + y sin ωt)2 + k2 (−x sin ωt + y cos ωt)2 + k3 z 2 ]
2
(1.159)
のもとで運動している.
(1) 角速度 ω で z 軸のまわりを回転する座標系ではこのポテンシャルは時間に依存しない関数となる.そこ
で,回転座標系を用いて Lagrangian を表せ.
(2)Lagrange 方程式を導け.
(3) 質点が xy 面内で振動する解として
x′ (t) = A exp(iΩt),
の形を仮定し,A, B, Ω が満たすべき方程式を導け.
(4) 前問で導いた方程式の解を求めよ.
38
y ′ (t) = B exp(iΩt)
(1.160)
第 2 章 剛体の運動
.
.
2.1 剛体の運動方程式
.
9+6(45'3.7*.!."&
+%32.5,0$
2.1.1 剛体の自由度
.9., 513)1-/#*.&$
ψ
)
./8+%3$
z
C (xC , yC , zC )
θ
O
y
ϕ
x
図 2.1: 剛体の位置と配向
質点系で,それを構成する任意の2つの質点間の距離が不変であるものを剛体と呼ぶ.以下に示すように,
剛体の運動の状態を指定するには 6 個の変数が必要である.まず,剛体内に一つの決まった点(例えば重心)
C をとる.この点の位置を決めるために三つの座標変数 (xC , yC , zC ) が必要である.点 C を通って剛体内に
固定された直線を考えると,この直線の方向は極座標 (θ, ϕ) で決まる.最後に,剛体はこの直線のまわりに
回転できるので,この角を ψ とする.以上より,6つの変数 (xC , yC , zC , θ, ϕ, ψ) によって剛体内の全ての質
点の位置が決定され,したがって剛体の位置と配向が決まる.このことを剛体の自由度は 6 であるという.
よって,自由に運動できる剛体の運動は 6 個の独立な運動方程式によってきめられる.
剛体の運動を決める運動方程式としては重心の運動方程式と角運動量の運動方程式を用いればよい.剛体
が N 個の質点から構成されているものとすると,剛体の重心の位置ベクトルは
∑N
∑N
m i ri
i=1 mi ri
∑
rG =
= i=1
m
M
i
i
で与えられ,角運動量は
L=
N
∑
mi (ri × r˙ i )
(2.1)
(2.2)
i=1
で与えられる.ここで mi , ri はそれぞれ剛体中の i 番目の質点の質量を位置ベクトルを表し,M は剛体の全
質量を表す.重心 rG と角運動量 L に対する運動方程式は力学1で学んだように(詳細は 0.2 節を見よ)
∑
d 2 rG
=
Fex
i
2
dt
i=1
N
M
dL ∑
=
(ri × Fex
i )=N
dt
i=1
(2.3)
N
39
(2.4)
で与えられる.ただし Fex
i は質点 i に作用する外力である.(2.4) 式の右辺の N は
N=
N
∑
(ri × Fex
i )
(2.5)
i=1
+$*#)$*&!)
で与えられ,力のモーメントまたはトルクと呼ばれる.
(2.4) 式はトルク方程式とも呼ばれる.重心 rG と角
'(!
運動量 L はそれぞれ3つの成分を持つベクトルであるから変数の数は合計で6つとなる.剛体の運動に制限
%$#%"
が課せられるときは,自由度の数は
6 よりも少なくなり,運動を記述するのに必要な運動方程式の数も少な
くなる.
剛体に力が作用する点を着力点と呼ぶ.着力点を通って力のベクトルと一致する直線を作用線と呼ぶ.着
%(
&
力点を作用線上でずらしても,力のベクトル和やモーメントは変化しないので,剛体への作用は変わらない.
F
−F
r2
r1
O
図 2.2: 偶力
剛体の2点に大きさが等しく方向が反対の力 F, −F が作用するとき,これを偶力と呼ぶ.偶力の場合,力
の和は
F + (−F) = 0
(2.6)
であることから重心の運動には作用しない.また,力のモーメントは
N = r1 × (−F) + r2 × F = (r2 − r1 ) × F = r21 × F
(2.7)
となる.よって,偶力は物体は回転させるよう作用するが,並進運動をさせる働きは無い.
2.1.2
剛体のつり合い
剛体がつり合って静止しているための条件を考える.このときは
d2 rG
dL
= 0,
=0
2
dt
dt
であるから
Ftotal =
N
∑
(2.8)
Fex
i =0
(2.9)
ri × Fex
i =0
(2.10)
i=1
N=
N
∑
i=1
でなければならない.
40
演習問題
R
F
bF
C
A
a
B
b
F2
F1
図 2.3: てこのつり合い.
【2-1-a】図で C を支点として,AC = a, BC = b とする.点 A に働く力を F1 ,点 B に働く力を F2 ,支点 C
での抗力を R とする.このとき,てこがつり合いにあるための F1 , F2 , R に対する条件を与えよ.
【2-1-b】図のように長さ l,質量 M のはしご AB がなめらかな鉛直な壁とあらい水平な床との間に立てかけ
てあり,水平となす角を θ,はしごと床との静止摩擦係数を µ とする.質量 m の人間が下端 A から x の距
離の点 P にたつとき,はしごがすべらないための µ に対する条件を導け.ただし,はしごの重心 G は中点に
あるとし,人間は質点とみなして良いとする.
B
P
G
A
図 2.4: はしごのつり合い.
41
2.2
2.2.1
固定軸を持つ剛体の運動
固定軸を持つ剛体の運動エネルギー
図 2.5: 固定軸を持つ剛体
(xi , yi , zi )
O
図 2.6: 円柱座標
剛体がある一直線のまわりに運動するように固定されている場合の運動を考える.この直線を固定軸と呼
ぶ.剛体は固定軸まわりの回転以外の運動はできないものとする.固定軸を z 軸にとると,z 軸まわりの角
度のみで剛体の位置がきまるので,自由度は 1 である.このとき剛体の運動を記述する Lagrangian を求め
よう.そのためにまず,運動エネルギーの表式を求める.剛体が N 個の質点から構成されているものとする
と,運動エネルギーは
T =
N
∑
1
i=1
2
mi (x˙ 2i + y˙ i2 + z˙i2 )
(2.11)
で与えられる.固定軸を z 軸とすると,各質点の位置を円柱座標
xi = si cos ϕi , yi = si sin ϕi
42
(2.12)
を用いて表すのが便利である.固定軸周りを運動する剛体の場合,zi と si は時間と共に不変であるから
z˙i = 0, s˙ i = 0 である.よって,各質点の速度は
x˙ i = −si ϕ˙ i sin ϕi , y˙ i = si ϕ˙ i cos ϕi , z˙i = 0
(2.13)
となる.剛体が標準の位置にあるときの ϕi を ϕi0 ,剛体が標準の位置からまわった角度 ϕ とすると,各質点
の角度 ϕi (t) は
ϕi (t) = ϕi0 + ϕ(t)
(2.14)
と書ける.したがって剛体では dϕi /dt は各質点で共通であり
dϕ
dϕi
=
=ω
dt
dt
(2.15)
と書ける.ここで ω は剛体の回転角速度である.したがって
x˙ i = −si ϕ˙ sin ϕi = −si ω sin ϕi , y˙ i = si ϕ˙ cos ϕi = si ω cos ϕi
(2.16)
となる.これより運動エネルギーは
T =
N
∑
1
i=1
2
mi s2i ϕ˙ 2 =
N
∑
1
i=1
となる.ここで,
I=
N
∑
2
mi s2i ω 2
mi s2i
(2.17)
(2.18)
i=1
と書くと
1
1 ˙2
I ϕ = Iω 2
(2.19)
2
2
と表すことができる.ここで I は剛体の固定軸のまわりの慣性モーメントと呼ばれる.慣性モーメントは剛
T =
体の質量分布と固定軸によって定まる量である.剛体の慣性モーメントにの物理的意味については次節で述
べる.
2.2.2
固定軸を持つ剛体の Lagrange 方程式
剛体を構成する各質点が保存力の作用を受けているとし,そのポテンシャルエネルギーを U としよう.一
般にはポテンシャルは各質点の位置を変数とする多変数関数として U (r1 , r2 , · · · , rN ) のように与えられる
が,上でも述べたように,各質点の位置は剛体の角度 ϕ によって完全に指定されるのでポテンシャル U は
ϕ の関数(ポテンシャルが時間に陽に依存する場合は ϕ と t の関数)として与えることができる.従って,
Lagrangian は
1
(2.20)
L = I ϕ˙ 2 − U (ϕ)
2
と表すことができる.
この系の運動方程式は Lagrange 方程式
d ∂L ∂L
=0
−
dt ∂ ϕ˙
∂ϕ
(2.21)
d ∂L
d
= I ϕ˙ = I ϕ¨
dt ∂ ϕ˙
dt
(2.22)
∂L
∂U
=
∂ϕ
∂ϕ
(2.23)
より導くことができる.ここで,
より,運動方程式
43
I ϕ¨ = −
∂U
∂ϕ
(2.24)
を得る.これが固定軸を持つ剛体の運動を記述する運動方程式である.具体的に U (ϕ) の関数形が与えられれ
ば,(2.24) 式を解く事によって剛体の運動を調べることができる.例えば U が ϕ によらず定数であれば ϕ¨ = 0
より ϕ = ϕ0 + ωt となり,一定の角速度で回転するという解が得られる.これは運動量保存則を意味する.
2.2.3
エネルギー保存則
力学的エネルギーの保存を証明しておこう.全エネルギーは E = T + U の時間微分
dE
dT
dU
=
+
dt
dt
dt
(2.25)
を考える.ここで運動エネルギーの時間微分は
dT
d
=
dt
dt
(
1 ˙2
Iϕ
2
)
= I ϕ˙ ϕ¨
(2.26)
となる.一方,ポテンシャルエネルギーの時間微分は
である.以上をまとめると
dU
∂U ˙
=
ϕ
dt
∂ϕ
(2.27)
(
)
dE
∂U
˙
¨
= ϕ Iϕ +
dt
∂ϕ
(2.28)
であるが,運動方程式 (2.24) より括弧の中は 0 となる.よって
dE
=0
dt
であり,従って全エネルギーが保存することが示された.
44
(2.29)
演習問題
【問題 2-2-a】図 2.7 のように水平な回転軸 O の周りで自由に回転する半径 a の円板があるとし,O に関する
円板の慣性モーメントを I とする.この円板に質量が無視できる糸を巻き付け糸の端に質量 m のおもりがつ
けてある.鉛直上向きに y 軸をとり,おもりが円板の中心軸と同じ高さにあるときを y = 0 とする.
(1) おもりの位置 y と円板の回転角 θ に対する運動方程式を導け.
(2) 時刻 t = 0 でおもりを初速度 0 で静かに落下させたとき,後の時刻におけるおもりと円板の運動を求めよ.
(3) 時刻 t = 0 で糸が巻かれる向きに円板に角速度 ω を与えたとき,後の時刻におけるおもりと円板の運動
を求めよ.おもりは最初の位置に比べてどれだけの高さまで上がることができるであろうか.
a
O
m
図 2.7: おもりをつけた糸を巻き付けた円板.
【問題 2-2-b】図のように中心軸 O の周りで自由に回転する半径 a の円板があるとし,O に関する円板の慣
性モーメントを I とする.これに質量が無視できる糸をかけ,その両端に質量が m,m′ のおもり P,Q を結
ぶ.m > m′ とすれば,P は落下し Q は上昇していく.糸はすべらないとものとする.
(1) おもり P,Q の位置と円板の回転角に対する運動方程式を求めよ.
(2) おもり P,Q に働く糸の張力 T ,T ′ を求めよ.
【問題 2-2-c】質量 M の剛体の一点 O を通る水平な軸を固定軸として,剛体を平衡の位置から傾けて離すと
剛体は鉛直面内で振動する.このような一種の振り子を剛体振り子,または物理振り子という.図のように
点 O と重心 G の間の距離を d とし,また O を通り紙面と垂直な軸の周りの剛体の慣性モーメントを I とす
る.このとき,剛体振り子が微小振動するときの周期を求めよ.
45
a
O
Q
P
図 2.8: 滑車の運動
O
y
G
x
図 2.9: 物理振り子
46
剛体の角運動量と慣性モーメント
2.3
剛体の角運動量
2.3.1
前節では,固定軸まわりを運動する剛体の運動方程式 (2.24) を Lagrange 方程式より機械的に導いた.こ
こで,(2.24) 式の物理的意味を考えよう.剛体の回転軸まわりの全角運動量(ここでは角運動量ベクトルの
z 成分)
Lz =
N
∑
mi (xi y˙ i − yi x˙ i )
(2.30)
i=1
を考える.円柱座標 (2.16) を使って角運動量を表すと
Lz =
N
∑
mi [(si cos ϕi )(si ϕ˙ cos ϕi ) − (si sin ϕi )(−si ϕ˙ sin ϕi )] =
i=1
=
(N
∑
mi (s2i cos2 ϕi + s2i sin2 ϕi )ϕ˙
i=1
)
mi s2i
N
∑
ϕ˙ = I ϕ˙
(2.31)
i=1
となる.従って (2.24) 式の左辺は角運動量の z 成分の時間微分を表す.一方,右辺に表れる ∂U/∂ϕ を各質
点に働く力を使って表すと
∑
∂U
=
∂ϕ
i=1
N
(
∂xi ∂U
∂yi ∂U
+
∂ϕ ∂xi
∂ϕ ∂yi
)
=−
)
N (
∑
∂xi
∂yi
Fix
+ Fiy
∂ϕ
∂ϕ
i=1
(2.32)
ここで
であるから
ここで N =
∑N
i=1 (ri
∂xi
∂
=
[si cos(ϕi0 + ϕ)] = −si sin(ϕi0 + ϕ) = −yi
∂ϕ
∂ϕ
(2.33)
∂
∂yi
=
[si sin(ϕi0 + ϕ)] = si cos(ϕi0 + ϕ) = xi
∂ϕ
∂ϕ
(2.34)
N
N
∑
∑
∂U
=−
(−yi Fix + xi Fiy ) = −
(ri × Fi )z = −Nz
∂ϕ
i=1
i=1
(2.35)
× Fi ) は系に働く力のモーメントである.よって,運動方程式 (2.24) は
dLz
= Nz
dt
(2.36)
という,剛体の角運動量に対するトルク方程式の形に書ける.また,剛体の回転角速度を用いて運動方程式
を書けば
I
d2 ϕ
dω
=I
= Nz
2
dt
dt
(2.37)
と書くこともできる.
慣性モーメントは剛体の回転運動の慣性の大きさを示すものである.力のモーメント N を一定にしたと
き,I が大きいほど回転角加速度 ω˙ = ϕ¨ は小さい.また,慣性モーメントの表式 (2.18) より剛体の質量が同
じでも軸から遠くの方に質量が分布しているほど慣性モーメントが大きいことがわかる.フィギュアスケー
トでスピンの際にスケート選手が腕を縮める事で回転が早くなるのは,慣性モーメントが減少することによ
る.また,体操競技で屈身(膝を曲げる)よりも伸身(膝を伸ばす)の技の方が難易度が高いのも,慣性モー
メントが大きいために同じ回転速度を得るためにはより大きなトルクを必要とするためである.
2.3.2
剛体の慣性モーメント
剛体の慣性モーメントについて詳しく考察してみよう.
47
回転半径
剛体の質量分布と回転軸が与えられれば,この軸のまわりの慣性モーメントは
I=
N
∑
mi s2i
(2.38)
i=1
で与えられる.ただし si は質点 i の軸からの距離である.ここで剛体の回転半径を
χ2 ≡
∑N
mi s2i
I
= ∑i=1
N
M
i=1 mi
(2.39)
で定義すると(M は剛体の全質量)慣性モーメントは
I = M χ2
(2.40)
と書ける.
Steiner の定理
剛体の z 軸まわりの慣性モーメントを考える.これは
I=
N
∑
mi (x2i + yi2 )
(2.41)
i=1
で与えられる.一方,剛体の重心 G(xG , yG , zG ) を通り,x, y, z 軸に平行に x′ , y ′ , z ′ 軸をとると,z ′ 軸のまわ
りの慣性モーメントは
I(G) =
N
∑
mi (x′i + yi′ )
2
2
(2.42)
i=1
となる.ここで
xi = xG + x′i , yi = yG + yi′
(2.43)
である.(2.43) 式を使って慣性モーメント (2.41) 式を書き直すと
I=
N
∑
mi [(xG +
x′i )2
+ (yG +
yi′ )2 ]
i=1
=
N
∑
2
+ 2yG yi′ + yi′ )
mi (x2G + 2xG x′i + x′i + yG
2
i=1
2
= M (x2G + yG
)+
N
∑
mi (x′i + yi′ ) + 2xG
2
2
∑N
i=1
mi x′i = 0,
N
∑
mi x′i + 2yG
i=1
i=1
となる.重心の定義より
2
∑N
i=1
N
∑
mi yi′
(2.44)
i=1
mi yi′ = 0 であるから上式の最後の2項は消える.そこで
2
x2G + yG
= h2
(2.45)
I = I(G) + M h2
(2.46)
とおけば
となる.この関係式を回転半径を使って書けば
χ2 = χ2G + h2
(2.47)
となる.ただし χG は z ′ 軸のまわりの回転半径である.この式は Steiner の定理(又は平行軸の定理)とし
て知られている.この式を使えば,重心を通る軸のまわりの慣性モーメントがわかっていればこの軸に平行
で h だけ離れている軸のまわりの慣性モーメントを知ることができる.
48
特別な形状の剛体の場合について成り立つ定理
剛体中に原点 O をとり,x 軸,y 軸,z 軸のまわりの慣性モーメントをそれぞれ Ix , Iy , Iz とする.これらは
Ix =
N
∑
mi (yi2 + zi2 ), Iy =
i=1
N
∑
mi (zi2 + x2i ), Iz =
i=1
N
∑
mi (x2i + yi2 )
(2.48)
i=1
で与えられる.ここで,剛体が非常に薄く xy 平面上に広がっているとしよう.このときほとんど全ての質点
について zi ≪ xi , yi であるから (2.48) 式の慣性モーメントはそれぞれ
Ix =
N
∑
mi yi2 , Iy =
i=1
N
∑
mi x2i , Iz =
i=1
N
∑
mi (x2i + yi2 )
(2.49)
i=1
となる.したがって関係式
Iz = Ix + Iy
(2.50)
が成り立つ.この式の両辺を M で割れば回転半径に対する関係式
χ2z = χ2x + χ2y
(2.51)
を得る.また,剛体が非常に細く,z 軸方向を向いているとすると,ほとんど全ての質点について xi , yi ≪ zi
であるから
Ix =
N
∑
mi zi2 , Iy =
i=1
N
∑
mi zi2 , Iz = 0
(2.52)
i=1
となる.したがって
Ix = Iy , I z = 0
(2.53)
χx = χy , χz = 0
(2.54)
が成り立つ.回転半径で書くと
となる.
連続的な質量分布を持つ剛体の慣性モーメント
剛体は非常に多くの質点から構成されている場合が多く,その場合は質量分布を連続的とみなすことがで
きる.このときには密度 ρ(r) を用いて慣性モーメント I を
∫∫∫
I=
s2 ρ(x, y, z)dxdydz
(2.55)
と積分の形に書くことができる.ただし s は点 (x, y, z) の回転軸からの距離である.たとえば回転軸が z 軸
であれば s2 = x2 + y 2 である.密度 ρ と N 質点系の質量分布の関係は,形式的にはデルタ関数を使って
ρ(x, y, z) =
N
∑
mi δ(x − xi )δ(y − yi )δ(z − zi )
(2.56)
i=1
によって与えられる.実際に (2.56) 式を (2.55) 式に代入すれば慣性モーメントの表式 (2.18) を再現すること
は容易に示せる.
簡単な形状の剛体の慣性モーメントの具体的な計算は演習で行う.
49
2.3.3
剛体に働く外力の行う仕事
剛体に働く外力 Fex
i によって,剛体中の各質点の位置ベクトルが dri だけ変位したとき,外力が行った仕
事は
dW =
N
∑
Fex
i · dri
(2.57)
i=1
で与えられる.固定軸のまわりの運動に対しては
であることより
dxi = −yi dϕ, dyi = xi dϕ, dzi = 0
(2.58)
[N
]
∑
ex
ex
dW =
(xi Fiy − yi Fix ) dϕ = Nz dϕ
(2.59)
i=1
となる.
50
演習問題
【2-3-a】太さの無視できる,質量 M ,長さ l の一様な剛体の棒について,以下の量を計算せよ.
(1) 重心を通って棒に垂直な回転軸に関する慣性モーメント IG (図 2.10(a)).
(2) 端を通って棒に垂直な回転軸に関する慣性モーメント I (図 2.10(b)).
(a)
(b)
O
O
x
x
図 2.10: 剛体棒の慣性モーメント.
【2-3-b】半径 a,質量 M の一様な円板の中心を通り円板と垂直な固定軸に関する慣性モーメントを求めよ.
【2-3-c】半径 a の一様な球の中心を通る固定軸に関する慣性モーメントを求めよ.ただし,球の質量を M と
する.
51
2.4
2.4.1
剛体の平面運動
剛体の平面運動の Lagrange 方程式
y
y′
x′
G(xG , yG )
x
O
図 2.11: 剛体の平面運動
剛体の各点が常にある一つの平面に平行に運動するとき,この運動を平面運動とよぶ.剛体の重心が xy 平
面内を運動するものとすると,剛体の位置は重心座標 (xG , yG ) で表すことができる.また,剛体の向きは,
重心を通り xy 面内にある直線が x 軸となす角 ϕ によって表すことができる.このようにして,剛体の位置
と向きを3変数 (xG , yG , ϕ) によって与えることができる.剛体中の質点の位置座標は,重心に対する相対座
標を使って表すことができる.
xi = xG + x′i , yi = yG + yi′ , zi = zi′
(2.60)
各質点が平面上を運動するので zi は時間によらない定数であり,従って z˙i = z˙i′ = 0 である.
平面運動を行う剛体の Lagrangian を導こう.まず,質点系の運動エネルギーの一般的表式は
T =
N
∑
1
i=1
2
mi (x˙ 2i + y˙ i2 + z˙i2 )
(2.61)
である.z˙i = 0 であることと,重心座標と相対座標を用いると
x˙ i = x˙ G + x˙ ′i ,
y˙ i = y˙ G + y˙ i′
2
2
2
x˙ 2i + y˙ i2 = x˙ 2G + y˙ G
+ 2x˙ G x˙ ′i + 2y˙ G y˙ i′ + x˙′i + y˙i′
より
(
N
∑
(2.63)
)
N
( ∑
) ∑
)
∑
1 ( ˙′ 2
2
2
mi x i + y˙′ i
(x˙ 2G + y˙ G
) + x˙ G
mi x˙ ′i + y˙ G
mi y˙ i′ +
2
i=1
i=1
∑N
となる.ここで第一項は全質量 M = i=1 mi を用いると
1
T =
2
(2.62)
mi
TG =
1
2
M (x˙ 2G + y˙ G
)
2
(2.64)
(2.65)
と書ける.これは重心運動のエネルギーを表す.また,第二項は 0 となることを以下に示そう.まず,重心
∑N
∑N
i=1 mi xi /M, yG =
i=1 mi yi /M より
座標の定義 xG =
N
∑
i=1
mi x′i =
N
∑
i=1
mi (xi − xG ) =
N
∑
mi xi − M xG = M xG − M xG = 0
i=1
52
(2.66)
N
∑
mi yi′ =
i=1
N
∑
mi (yi − yG ) =
i=1
N
∑
mi yi − M yG = M yG − M yG = 0
が成り立つ.これらの時間微分も 0 であるから
(N
)
(N
)
N
N
∑
∑
d ∑
d ∑
′
′
′
mi x˙ i = 0,
mi y˙ i′ = 0
mi x i =
mi yi =
dt
dt
i=1
(2.67)
i=1
i=1
(2.68)
i=1
i=1
となる.これより (2.64) 式の第二項は 0 となる.第三項は相対運動の運動エネルギー
T′ =
N
∑
1
i=1
2
2
2
mi (x˙′i + y˙i′ )
(2.69)
を表す.以上より運動エネルギーは重心の運動エネルギーと相対運動のエネルギーの和
T = TG + T ′ =
N
)
∑
1
1 ( ˙′ 2
2
2
M (x˙ 2G + y˙ G
)+
mi x i + y˙′ i
2
2
i=1
(2.70)
で与えられる.剛体の平面運動に限らず,一般に質点系の運動エネルギーは重心運動の運動エネルギーと相
対運動の運動エネルギーの和で与えられる.
ここで,相対運動については固定軸を持つ剛体の運動を考えた時と同様に考えればよい.まず,相対座標
を (x′i , yi′ ) を円柱座標 (si , ϕi ) で表す.
x′i = si cos ϕi ,
yi′ = si sin ϕi
(2.71)
さらに,全ての質点の角度変数 ϕi を剛体の代表的な角度 ϕ を用いて ϕi (t) = ϕi0 + ϕ(t) と表す.前節と同様
の手続きによって,相対運動の運動エネルギーは
T′ =
1
I(G) ϕ˙ 2
2
(2.72)
と書ける.ここで I(G) は剛体の重心を通って z 軸に平行な軸のまわりの慣性モーメント
I(G) =
N
∑
mi (x′i + yi′ )
2
2
(2.73)
i=1
である.以上より,平面運動する剛体の運動エネルギーは
T =
1
1
2
M (x˙ 2G + y˙ G
) + I(G) ϕ˙ 2
2
2
(2.74)
となる.
剛体の各質点に,ポテンシャル U から導かれる保存力が働いているものとする.剛体中の各質点の位置は
三変数 (xG , yG , ϕ) で指定されるので,ポテンシャルエネルギーは xG , yG , ϕ の関数 U = U (xG , yG , ϕ) として
与えることができる.以上より,平面運動を行う剛体の Lagrangan は
˙ = 1 M (x˙ 2 + y˙ 2 ) + 1 I(G) ϕ˙ 2 − U (xG , yG , ϕ)
L(xG , yG , ϕ, x˙ G , y˙ G , ϕ)
G
G
2
2
(2.75)
となる.
xG , yG , ϕ に対する Lagrange 方程式
∂L
d ∂L
−
=0
dt ∂ x˙ G
∂xG
(2.76)
d ∂L
∂L
−
=0
dt ∂ y˙ G
∂yG
(2.77)
d ∂L ∂L
−
=0
dt ∂ ϕ˙
∂ϕ
(2.78)
53
より運動方程式の具体的表式を導こう.Lagrangian の表式 (2.75) より xG , yG , ϕ に対する運動方程式を具体
的に導出すると
d2 xG
∂U
=−
dt2
∂xG
d2 yG
∂U
M
=−
2
dt
∂yG
d2 ϕ
∂U
I 2 =−
dt
∂ϕ
M
(2.79)
(2.80)
(2.81)
となる.これらの運動方程式を,各質点に働く力を使って表すことも出来る.質点の座標を xG , yG , ϕ を使っ
て表すと
xi = xG + x′i = xG + si cos(ϕi0 + ϕ), yi = yG + yi′ = yG + si sin(ϕi0 + ϕ)
(2.82)
と書ける.ポテンシャルがもともと各質点の座標の関数 U = U ({xi , yi , zi }) として与えられているものとす
ると,U を xG , yG , ϕ でそれぞれ微分したものは (2.82) 式より
∑
∂U
=
∂ϕ
i=1
N
(
N
N
N
∑
∑
∑
∂U
∂xi ∂U
∂U
=
=
=−
Fix = −Fx
∂xG
∂xG ∂xi
∂xi
i=1
i=1
i=1
(2.83)
N
N
N
∑
∑
∑
∂yi ∂U
∂U
∂U
=
=
=−
Fiy = −Fy
∂yG
∂yG ∂yi
∂yi
i=1
i=1
i=1
(2.84)
∂xi ∂U
∂yi ∂U
+
∂ϕ ∂xi
∂ϕ ∂yi
)
=
) ∑
N (
N
∑
∂x′i ∂U
∂y ′ ∂U
+ i
=
(yi′ Fix − x′i Fiy ) = −Nz′
∂ϕ
∂x
∂ϕ
∂y
i
i
i=1
i=1
(2.85)
となる.ただし Fx , Fy は剛体に働く力の和の x, y 成分,Nz′ は重心を通って z 軸に平行な回転軸のまわりで
の力のモーメントである.以上より,平面運動する剛体の運動方程式は,以下のように書くこともできる.
d2 xG
= Fx
dt2
d2 yG
M
= Fy
dt2
2
d ϕ
I 2 = Nz′
dt
M
(2.86)
(2.87)
(2.88)
重心を通って z 軸に平行な軸のまわりの角運動量は
L′z =
N
∑
mi (x′i y˙ i′ − yi′ x˙ ′i )
(2.89)
i=1
と書けるので,(2.88) 式はトルク方程式の形
dL′z
= Nz′
dt
(2.90)
に書くことも出来る.
2.4.2
エネルギー保存則と仕事
剛体の力学的エネルギー
˙ = T (x˙ G , y˙ G , ϕ)
˙ + U (xG , yG , ϕ) = 1 M (x˙ 2 + y˙ 2 ) + 1 I(G) ϕ˙ 2 + U (xG , yG , ϕ) (2.91)
E(xG , yG , ϕ, x˙ G , y˙ G , ϕ)
G
G
2
2
が保存することは容易に示せる.まず運動エネルギーの時間微分は
dT
= M x˙ G x
¨G + M y˙ G y¨G + I(G) ϕ˙ ϕ¨
dt
54
(2.92)
となる.次にポテンシャルエネルギーの時間微分は
dU
∂U
∂U
∂U ˙
=
x˙ G +
y˙ G +
ϕ
dt
∂xG
∂yG
∂ϕ
(2.93)
となる.これらを合わせると
(
)
(
)
(
)
∂U ˙
dE
∂U
∂U
¨
= Mx
¨G +
x˙ G + M y¨G +
y˙ G + I(G) ϕ +
ϕ=0
dt
∂xG
∂yG
∂ϕ
(2.94)
を得る.
剛体が外力のもとで運動するときに,外力が行う仕事を求めよう.平面運動を行っているとき剛体の各点
は z 方向には動かないので,剛体の各質点の位置が微少量 dxi , dyi だけ移動したときの仕事は
N
∑
dW =
(Fix dxi + Fiz dyi )
(2.95)
i=1
である.ここで
dxi = dxG + dx′i = dxG − ri′ sin ϕi dϕ = dxG − yi′ dϕ
(2.96)
dyi = dyG + dyi′ = dyG + ri′ cos ϕi dϕ = dyG + x′i dϕ
(2.97)
である.これらを (2.95) 式に代入すれば
dW = Fx dxG + Fy dyG + Nz′ dϕ
(2.98)
を得る.
2.4.3
拘束条件がある場合
以上の議論は剛体が平面運動を行うということ以外には拘束条件は課せられていないものと仮定していた.
しかしながら,重心運動と回転運動の間に何らかの拘束条件が課せられている場合も少なくない.具体的に
以下の例題によって拘束条件が課せられている場合の剛体の平面運動の取り扱いを説明する.
【例題 2-4-a】半径 a,質量 M の一様な円柱が粗い水平面上を滑らずに転がっている.円柱の重心は x 軸に平
ˆ
行に運動しているものとする.円柱にはポテンシャル U から導かれる外力が働いており,その総和は F = F x
である.また,重心を通る軸のまわりの外力のモーメントは 0 であるとする.
a
F
G
x
Ff
xG
図 2.12: 平面上を滑らずに転がる円柱の運動
(1) 円柱の重心座標 xG と角度 ϕ を用いて Lagrangian を表せ.
(2) 円柱が滑らないという拘束条件より角度 ϕ を xG を用いて表し,Lagrangian を xG のみの関数として与
えよ.
(3)Lagrange 方程式より xG に対する運動方程式を導け.
55
(4) 円柱に働く力の総和 Ftot は外力 F と床との摩擦力 Ff の和で与えられる.前問で導いた運動方程式より,
摩擦力 Ff を外力 F で表せ.また,円柱に働く力のモーメントを求め,角度 ϕ に対する運動方程式を与えよ.
(5) 円柱と水平面の間の静止摩擦係数を µ としたとき,円柱が滑らないための条件を求めよ.
【解答】
(1) 外力が x 成分のみを持つことから ∂U/∂y = 0 である.また,外力のモーメントが 0 であることから
∂U/∂ϕ = 0 である.よってポテンシャル U は xG のみの関数 U = U (xG ) として与えられる.ただし,
dU/dxG = −F である.また,重心は x 方向のみ運動することから y˙ G = 0 である.以上より Lagrangian は
L=
M 2
1
x˙ G + I ϕ˙ 2 + U (xG )
2
2
(2.99)
となる.
(2) 円柱が滑らずに転がっている場合は,水平面と円柱の間に働く摩擦力は仕事をしない.よって,円柱が滑
らないという拘束条件は滑らかな拘束と見なすことができる.この拘束条件より,x˙ G = −aϕ˙ という関係が
成り立つ.よって
L=
M 2
1
M
x˙ + I(x˙ G /a)2 + U (xG ) =
2 G 2
2
(
1+
I
M a2
)
x˙ 2G + U (xG )
(2.100)
となる.
(3) Lagrange 方程式
d ∂L
∂L
−
dt ∂ x˙ G
∂xG
より
M
(
1+
I
M a2
)
(2.101)
d2 xG
=F
dt2
(2.102)
となる.円柱の慣性モーメントが I/M a2 = 1/2 であることを使うと
3 d2 xG
M
=F
2
dt2
(2.103)
となる.この運動方程式は,円柱が滑らずに回転する場合は,円柱が回転せずに滑らかに運動するときに比
(
)
べて,実効的に質量が M → M 1 + MIa2 = 3M/2 と増大していることを示している.
(4) 円柱の重心座標 xG に対する運動方程式を外力 F と摩擦力 Ff を使って書くと
M
d2 xG
= F − Ff
dt2
(2.104)
となる.この式と,前問で導いた運動方程式
d2 xG
M
=
dt2
(
1+
を比較すると,
Ff = F −
I
M a2
)−1
F =
M a2
F
M a2 + I
M a2
I
F =
F
2
2
Ma + I
Ma + I
(2.105)
(2.106)
となる.円柱の慣性モーメント M a2 /I = 2 を使うと
Ff =
F
3
(2.107)
となる.また,円柱に働く力のモーメントの大きさは N = aFf であるから
I
d2 ϕ
= −aFf
dt2
となる.
56
(2.108)
(5) 最大静止摩擦力は
F0 = µM g
(2.109)
であるから,円柱が滑らないための条件は Ff < F0 より
)
(
M a2
= 3µM g
F < µM g 1 +
I
(2.110)
となる.
演習問題
【問題 2-4-a】半径 a,質量 M の一様な円柱が,水平面と角 α をなすあらい斜面 (静止摩擦係数 µ) の上を滑
らずに転がり落ちる.このとき,以下の問いに答えよ.ただし,重力加速度を g とする.
(1) 図 2.13 のように座標軸をとる.摩擦力を F ,重心の座標を xG ,重心の周りの回転角を θ とする.このと
き,Lagrangian を xG , θ および円柱の重心を通る回転軸に関する慣性モーメント I を用いて表せ.
(2) 今,円柱は斜面にそって滑らないとしているので,x˙G = aθ˙ が成り立つ.この条件を用いて,Lagrangian
を xG , x˙ G の関数として与えよ.
(3)Lagrange 方程式より xG に対する運動方程式を求めよ.
(4) 水平面と円柱の間に働く摩擦力を Ff とする.Ff を g, M, a, I などを用いて表せ.
(5) 円柱が滑らないための µ に対する条件を求めよ.
y
x
G
図 2.13: 斜面を滑らずに転がる円柱.
【問題 2-4-b】図 2.14 のように,質量 M ,半径 a の一様な円板の周りに糸を巻き付け,糸の一端を固定して
円板を落下させる.円板の重心は鉛直線上を運動するものとする.
(1) 鉛直下向きに x 軸をとり,円板の重心の座標を xG ,円板の回転角を θ とする.Lagrangian を xG , θ を用
いて表せ.
(2) 円板の重心の速度と回転角速度の関係を用いて Lagrangian を xG のみを用いて表せ.
(3) 円板の重心の加速度および糸の張力を求めよ.
57
a
G
図 2.14: 糸を巻き付けた円板の運動.
【問題 2-4-c】一様で長さ 2a,質量 M の棒の両端に鉛直な長さ l の糸をつけ水平につるしてある(図 2.15(a)).
a
a
図 2.15: 糸でつるされた棒の運動.(a)t < 0 では棒の両端につけた糸により棒は水平につるされている.
(b)t = 0 において一方の糸を切断すると,t > 0 では棒は運動を行う.(c) 棒の運動を一般化座標 θ, ϕ で表す.
(1) 時刻 t < 0 では棒は静止していた.このとき,それぞれの糸の張力を求めよ.
(2) 図 2.15(b) のように,t = 0 において一方の糸を切断すると,棒は運動を始める.t > 0 における棒の運動
を記述する Lagrangian を求めよう.図 2.15(c) のように座標軸をとり,一般化座標として糸の振れ角 θ を棒
の振れ角 ϕ をとることにする.棒の重心座標 (xG , yG ) を θ, ϕ で表すことにより,Lagrangian を θ, ϕ を使っ
て与えよ.
(3)Lagrange 方程式より θ, ϕ に対する運動方程式を導け.
(4) 棒の重心まわりトルクは糸の張力によって与えられる.このことと (3) で導いた ϕ に対する運動方程式よ
り糸の張力を回転角加速度 ϕ¨ を使って表せ.
(5) t = 0(片方の糸が切断された瞬間)における棒の重心の加速度,棒の回転角加速度,糸の張力を求めよ.
58
【問題 2-4-d】図 2.4.3 のように,半径 R の円筒の内部の面に沿って滑らずに転がる半径 a,質量 M の一様
な円柱の運動を考える.円柱の軸の周りの慣性モーメントを I とする.鉛直上向きに y 軸をとり,円柱には
一様な重力 M g が鉛直下向きに働いている.
(1) 円柱の軸の x, y 座標 (xG , yG ),円柱の代表的な角度を φ とする.Lagrangian を (xG , yG , φ) を用いて表せ.
(2) 円柱が円筒の内部表面に沿って運動するという拘束条件を取り入れるために,図 (b) のように角度 ϕ を一
般化座標として用いる.円柱の位置 (xG , yG ) および速度 (x˙ G , y˙ G ) を ϕ を用いて表せ.
(3) さらに,円柱が滑らずに転がるという条件より φ を ϕ を用いて表し,Lagrangian を ϕ, ϕ˙ のみの関数とし
て表せ.
【ヒント:円柱が滑らずに転がっている場合,図より a(ϕ + φ) = Rϕ が成り立つ.
】
(3) Lagrange 方程式より ϕ に対する運動方程式を導け.
(4)ϕ ≪ 1 のとき,運動方程式を ϕ について線形化し,その一般解を求めよ.
59
2.5
剛体の三次元的な運動
今までは剛体の回転軸が常にある軸に平行である場合を考えてきた。ここでは,剛体が固定軸を持たない
様な場合も含んだ一般的な運動の記述を考える.前節でも見たように,剛体中の各点の座標を重心座標 rG と
相対座標 r′i = r − rG を用いて表すと運動エネルギーは
T = TG + T ′ ,
TG =
1
M r˙ 2G ,
2
T′ =
N
∑
1
i=1
2
mi r′i
2
(2.111)
と表すことができる.この表式は剛体に限らず全ての質点系に対して一般的に成り立つ.この質点系が剛体
を構成している場合,剛体の定義により剛体内の各質点と重心の距離は常に不変である.従って剛体内の各
質点は重心 G を中心とする球面上を運動し,剛体全体としては重心 G を固定点としてそのまわりを回転する
ことになる.そこで以下では,固定点を持つ剛体の回転運動を考えることにする.実際に剛体のある一点が
固定されている場合であっても良いし,剛体が並進運動を行っている場合には重心からの相対座標を考えて,
重心の位置を固定点とすればよい.例えば,コマの運動においてコマの一部分が地面に接していて動かない
場合,ここを固定点とする.
前にも扱ったように,回転軸が z 軸に固定されている場合は,剛体中の各質点の相対座標を円柱座標
xi = si cos ϕi , yi = si sin ϕi
(2.112)
と表したとき si は時間によらず一定となり ϕi の時間微分は剛体の全ての点で共通,つまり ϕ˙ i = ϕ˙ となる.
ここで ϕ は剛体の代表的な点の z 軸まわりの回転角である.これらを用いると,各質点の速度は
˙ i sin ϕi = −y˙ i , y˙ i = ϕs
˙ i cos ϕi = ϕx
˙ i , z˙i = 0
x˙ i = −ϕs
(2.113)
˙ z とすると (2.113) 式は
となる.ここで角速度ベクトルを Ω = ϕˆ
r˙ i = Ω × ri
(2.114)
と表すことができる.これは回転軸が一般の向きの場合であっても,角速度ベクトルを回転軸の向きを持ち
大きさが軸まわりの回転角速度 ϕ˙ に等しいベクトルとして定義すれば,やはり各質点の速度は (2.114) 式の
形に表すことができる.
非常に短い時間内の剛体の回転を考えると,これは重心を通る1つの軸の周りの微小回転によって表され
るはずである.そこで,時間に依存する角速度ベクトル Ω(t) を導入すれば,微小時間 t ∼ t + dt における剛
体各点の座標ベクトルの変化は
ri (t + dt) = ri + (Ω × ri )dt
(2.115)
と表すことができて,その時間微分,つまり速度ベクトルは
r˙ i = Ω × ri
(2.116)
で与えられる.
以上を用いて剛体の一般的な運動に対する運動エネルギーの表式を導こう.(2.114) 式を質点系の運動エネ
ルギーの一般的表式に代入すると,回転運動エネルギーの表式
T =
N
∑
1
i=1
2
mi (Ω × ri )2
(2.117)
を得る.この表式をベクトル解析の公式 (A × B)2 = A2 B2 − (A · B)2 1 を使って書き換えると
(
)2
∑
∑
∑
2 2
2
2
2
2
(Ω × ri ) = Ω ri − (Ω · ri ) =
ωµ
xiν −
ωµ xiµ
=
∑
µ=1,2,3
ν=1,2,3
∑ [
]
ωµ2 xiν 2 − ωµ ων xiµ xiν
µ=1,2,3
(2.118)
µ=1,2,3 ν=1,2,3
1 幾何学的には,二つのベクトル A, B のなす角を θ とすると A × B の大きさは |A × B| = |A||B| sin θ となる.これと,
A · B = |A||B| cos θ を使えばこの公式が得られる.
60
となる.ただし,Ω = (ω1 , ω2 , ω3 ), ri = (xi1 , xi2 , xi3 ) とした.ここで慣性モーメントテンソルを
Iµν =
∑
mi (δµν ri 2 − xiµ xiν )
(2.119)
3
1 ∑
Iµν ωµ ων
2 µ,ν=1
(2.120)
i
で定義すると,回転運動のエネルギーは
T =
と表される.剛体中の質点の分布が連続的な質量密度分布関数 ρ(r) で与えられる場合,慣性モーメントテン
∫
ソルは
dr′ ρ(r)(δµν r2 − xµ xν )
Iµν =
(2.121)
で与えられる.Iνµ は νµ の入れ替えに対して対称であるから,実対称行列である.線形代数でも勉強したよ
うに,このような行列は適当な直交行列によって対角化できる.つまり,適当な直交座標系をとることによっ
て Iµν が対角成分のみを持つ,つまり
Iµν = δµν Iµ
(2.122)
となるようにできる.このときの座標軸を慣性主軸,I1 , I2 , I3 を主慣性モーメントを呼ぶ.
固定軸を持つ剛体の場合,剛体の角運動量と回転角速度は慣性モーメントによって結びつけられていた.今
∑N
の場合においても類似の関係が成り立つかどうか見てみよう.質点系の角運動量の表式 L = i=1 mi r × r˙ i
において (2.116) 式を代入すると
L=
∑
mi ri × (Ω × ri )
(2.123)
i
となる.ここでベクトルの外積の公式 A × (B × C) = B(A · C) − C(A · B) を用いると
L=
∑
]
[
mi Ωr2i − ri (Ω · ri )
(2.124)
i
となる.各運動ベクトルの各成分を L = (L1 , L2 , L3 ) と書く事にすると
[
]
3
3 ∑
∑
∑
∑
)
(
2
Lµ =
mi ωµ ri − xiµ
ων xiν =
mi δµν r2i − xiµ xiν ων
ν=1
i
=
3
∑
ν=1
Iµν ων
i
(2.125)
ν=1
となる.
61
第 II 部
解析力学
第 3 章 Hamilton の変分原理
この章では力学法則を変分原理によって定式化しよう.1 章で導入した Lagrange 方程式が Hamilton の変
分原理によって導出されることを示す.
3.1
変分原理による力学法則の定式化
Hamilton の変分原理によると,力学法則は以下のように定式化される.ある系の力学的状態が n 個の
一般化座標 {qi } によって表されているとする.時刻 t = t1 および t = t2 (t1 < t2 ) に,系が 2 組の座標値
({qi1 }, {qi2 }) で与えられる状態にあったとしよう.つまり
qi (t1 ) = qi1 , qi (t2 ) = qi2 ,
(i = 1, 2, · · · , n)
(3.1)
であったとする.この間の時刻 t1 < t < t2 では,系は次のように定義された作用積分
∫ t2
S=
L({qi }, {q˙i }, t)dt
(3.2)
t1
-ĠōÆ*Ģ¨RĉŏĝăIJ>3ġĚĄĜ"ġō?$.
が停留値を取るように運動する.この変分原理は最小作用の原理とも呼ばれる.
(一般には作用積分はかなら
ĉĈġ)F|'Ķwďċ«ďĜĄIJčĞĶ®ĜīįąŎ
ずしも最小値であるとは限らない.あとで示すように,運動方程式を導くのには停留条件のみを使う.
)
3.1.1
½Í Ģ½ĉÞuĠÆ*ĶªęĜĄIJĞďįąŎk& ġÏĢ
Ĉİ#ďōk& ġ ġÇđIJ½ĢÆ*Ģōk&
質点の一次元運動の場合
ġćČIJÆ*Ö
ĶxĬĖĄŎ
x
x(t1 ) = x1
x(t)
x(t2 ) = x2
²ąĪĝĭĠċō½ĢÆ*ģæìûùõôiTġXąŎ
図 3.1: 粒子の一次元的な運動
ččĝģE)Ģ
一番簡単な,運動の自由度が1である場合について具体的に,変分原理が確かに力学法則を正しく表して
īĶ¦ĆIJŎ3.1 に示すように,
いることを見てみよう.質量 m の質点が x 軸上で一次元的な運動を行っているとする.図
時刻 t1 に空間の点 x1 から出発し,時刻 t2 に点 x2 に達する質点の運動の,時刻 t1 < t < t2 における運動
x(t) を求めたい.言うまでもなく,質点の運動は以下の Newton 方程式に従う.
m
d
d2 x
= F (x) = − U (x)
2
dt
dx
(3.3)
ただしここでは保存力の場合のみを考え,力がポテンシャル U によって与えられるとした.
時刻 t1 < t < t2 における質点の位置 x は時刻 t の関数 x(t) として与えられる.これを運動の経路と呼ぼ
1 とする)はただ1つだけである.しかしここ
う.実際に Newton 方程式に従って実現する経路(図 3.2 の⃝
2 ,⃝
3 )もならべて考えることにする.もちろん,
では,物理的には実現不可能な仮想的な経路(例えば図の⃝
この2つ以外にも仮想的な経路は無数存在する.数多くの可能な経路の中から,物理的に実現する経路を選
び出すというのが変分原理の考え方である.微分方程式により逐次的に位置を求めていくのではなく,
「いっ
63
ġćČIJ½Ģ£ ģk& ĢÐhÖ
čijĶÆ*Ģ¡ÀĞ6ĩąŎ
x
æìûùõôiTġXęĜH
¡Àŋ:ĢüĞđIJŌģĖ
ėČĝăIJŎ
ĞďĜĆİ
x2
3
ččĝģōġģH
]Ġ¡ÀŋĆĤ:Ģ
ŌĭĠİħĜ¦ĆIJčĞġđIJŎ
ķōčĢŐĚ@ġĭ]
ģhE=đIJŎ
1
2
x1
t2
t1
t
ġ{ęĜ$ďĖ$Ķ¦ĆįąŎ
図 3.2: 粒子の運動の経路
Ģ0§Ġ¡ÀĢĈİōġH
đIJ¡ÀĶÉĥ#đ
Ģĉ?$.Ģ¦ĆiĝăIJŎ x
x2
TġįıÅuġ£ĶxĬĜĄċĢĝģĠċōāĄęĨķġĂ
ĬĜďĪąōĞĄą¦ĆiŎ
1
ġōččĝģsĀĠ
¦ĆIJŎ¡À ŋĚĪ
ĆIJĞ Ģĉ
ĢįąĠ Ķ ĢyÐh
ĦŎ
2
x1
t2
t1
t
図 3.3: 経路の微小変化
ぺんに」経路を求めてしまう,という考え方であると言ってもよいだろう.Lagrangian を時間に沿って積分
āÐhĢÐhĂĝăIJŎ
した作用積分を考えよう.
∫
t2
S=
L(x(t), x(t))dt
˙
(3.4)
üŌĶLďėČĒİďĜ
ĞďĖĞĊŋ:ĢýŌĢ
先にも述べたように,ここでは様々な仮想的な経路 x(t) を考える.経路 x(t)(つまり x(t) の関数形) を与える
t
ĚĪı?$
と作用 Ķ¦ĆįąŎĖėďōÖCĞģ;G
S の値が一つに決まる.このような S を x の汎関数(functional)と呼ぶ.いわば,汎関数は「関数の関
t1
1 )を少しだけずらして x(t) + δx(t) としたとき(図 3.3 の⃝
2 )の S の
数」である.ある経路 x(t) (図 3.3 の⃝
ĝăIJŎ
値の微小変化,つまり変分 δS を考えよう.ただし, 始点と終点は固定されているので,δx(t1 ) = δx(t2 ) = 0
である.変分 δS = S[path 2] − S[path 1] を δx の 1 次まで計算しよう.ここで
∫
t2
S[path 1] =
L(x(t), x(t))dt
˙
(3.5)
L(x(t) + δx(t), x(t)
˙ + δ x(t))dt
˙
(3.6)
t1
∫
t2
S[path 2] =
t1
である.S[path 2] の被積分関数の Lagrangian を δx と δ x˙ の一次まで展開すると
∫
S[path 2] ≃
∫
t2
t2
L(x(t), x(t))dt
˙
+
t1
t1
64
(
)
∂L
∂L
δx +
δ x˙ dt
∂x
∂ x˙
∫
t2
(
= S[path 1] +
t1
)
∂L
∂L
δx +
δ x˙ dt
∂x
∂ x˙
(3.7)
であるから,作用積分の変分 δS は
∫
(
t2
δS =
t1
)
∂L
∂L
δx +
δ x˙ dt
∂x
∂ x˙
(3.8)
となる.ここで上式の積分の第二項目を部分積分できて
∫
t2
t1
∂L
∂ x˙
(
)
[
]t2 ∫ t2
(
)
(
)
∫ t2
∂L
d ∂L
d
d ∂L
δx dt =
δx −
δxdt = −
δxdt
dt
∂ x˙
∂ x˙
∂ x˙
t1 dt
t1 dt
t1
(3.9)
となる.ただし,最後の式変形では支点と終点が固定されていること (δx(t1 ) = δx(t2 ) = 0) を使った.以上
より,変分 δS は
∫
[
t2
δS =
t1
d
∂L
−
∂x
dt
(
∂L
∂ x˙
)]
δxdt
(3.10)
で与えられる.
ここで「δx(t) の関数形をどのように選んだとしても(つまり任意の δx に対して),必ず変分 δS が 0 で
ある」という条件を課してみよう.
∫
t2
[
δS =
t1
∂L
d
−
∂x
dt
(
∂L
∂ x˙
)]
δxdt = 0
(3.11)
この条件は,
「作用積分が停留値を取る」ということもできる. 任意の δx に対してこれが成り立つためには,
積分の [ ] の中が 0 になる必要がある.したがって,
d
∂L
−
∂x
dt
(
∂L
∂ x˙
)
=0
(3.12)
を得る.これは Lagrange 方程式に他ならない.これは作用積分が停留値をとるための十分条件でもある.以
上より,
「運動方程式を満たす現実の運動は作用積分の停留値を与える経路 x(t) で与えられる」ことが示さ
れた.
3.1.2
一般的な場合への拡張
今までの話を一般に運動の自由度が n である場合に拡張しよう.例えば N 個の質点系で自由度が 3N の場
合である.時刻 t = t1 および t = t2 (t1 < t2 ) に,系が 2 組の座標値 {qi1 }, {qi2 } で与えられる状態にあった
とし,この間の時刻 t1 < t < t2 での運動を考える.様々な仮想的な経路 {qi (t)} の中から,運動方程式に従
い実際に実現する唯一の経路が Hamilton の変分原理によって選び出されることを示したい.つまり,ある経
路が作用積分
∫
t2
S=
L({qi }, {q˙i }, t)dt
(3.13)
t1
の停留値を与えるという条件は Lagrange 方程式
d
∂L
−
∂qi
dt
(
∂L
∂ q˙i
)
=0
(3.14)
と同値であることを示したい.
ある経路 {qi (t)} を少しだけずらして {qi (t) + δqi (t)} としたときの S の変分 δS = S[{qi + δqi }] − S[{qi }]
を考えよう.ただし, 始点と終点は固定されているので,全ての i について δqi (t1 ) = δqi (t2 ) = 0 である.
∫
S[{qi }] =
t2
L({qi (t)}, {q˙i (t)}, t)dt
t1
65
(3.15)
∫
t2
S[{qi + δqi }] =
L({qi (t) + δqi (t)}, {q˙i (t) + δ q˙i (t)}, t)dt
(3.16)
t1
1 自由度の場合と同様に S[{qi + δqi }] を δqi と δ q˙i の一次まで展開して
∫
t2
S[{qi + δqi }] ≃
L({qi (t)}, {q˙i (t)}, t)dt +
t1
n ∫
∑
δS =
n ∫
∑
t2
t1
i=1
(
(
t1
i=1
したがって,作用 S の変分は
t2
)
∂L
∂L
δqi +
δ q˙i dt = S[{qi }] + δS
∂qi
∂ q˙i
)
∂L
∂L
δqi +
δ q˙i dt
∂qi
∂ q˙i
(3.17)
(3.18)
となる.ここで積分の中の第二項目を部分積分できて
∫
t2
t1
∂L
∂ q˙i
(
)
[
]t2 ∫ t2
(
)
(
)
∫ t2
d
∂L
d ∂L
d ∂L
δqi dt =
δqi
−
δqi dt = −
δqi dt
dt
∂ q˙i
∂ q˙i
∂ q˙i
t1 dt
t1 dt
t1
(3.19)
となる.ここで最後の式変形では始点と終点が固定されていること(全ての i に対して δqi (t1 ) = δqi (t2 ) = 0)
を使った.以上より,作用積分の変分 δS は以下のように与えられる.
δS =
n ∫
∑
t2
t1
i=1
[
∂L
d
−
∂qi
dt
(
∂L
∂ q˙i
)]
δqi dt
(3.20)
ここで「δqi (t) の関数形をどのように選んだとしても(つまり任意の δqi に対して),必ず変分 δS が 0 であ
る」という停留条件を課そう.
δS =
n ∫
∑
i=1
t2
t1
[
d
∂L
−
∂qi
dt
(
∂L
∂ q˙i
)]
δqi dt = 0
(3.21)
任意の δqi に対して上式の変分 δS が 0 になるためには,積分の [ ] の中が全ての i に対して常に 0 である必
要がある.したがって,
∂L
d
−
∂qi
dt
(
∂L
∂ q˙i
)
=0
(3.22)
を得る.これは一般化座標の場合の Lagrange 方程式に他ならない.したがって,以下の変分原理が示された.
Hamilton の変分原理
運動方程式を満たす現実の運動は作用積分の停留値を与える経路 {qi (t)} で与えられる.
3.1.3
周期運動の場合の変分原理
変分原理より Lagrange 方程式を導く際に,(3.19) 式の変形において端点条件(全ての i に対して δqi (t1 ) =
δqi (t2 ) = 0)を用いた.ここで,系が周期 T の周期運動を行っている場合を考えてみよう.つまり,全ての
i に対して
qi (t + T ) = qi (t), q˙i (t + T ) = q˙i (t), δqi (t + T ) = δqi (t)
(3.23)
を仮定する.作用積分において t2 = t1 + T とおけば (3.19) 式の第一項は
[
∂L
δqi
∂ q˙i
]t1 +T
t1
∂L ∂L =
δqi
−
δqi = 0
∂ q˙i t1 +T
∂ q˙i t1
(3.24)
となり消える.したがって周期運動の場合は1周期 T にわたる作用積分を考えれば端点を固定するという条
件無しでも変分原理が成り立つ.
66
演習問題
【問題 3-1-a】質量 m の粒子が一次元的な運動をして,時刻 t1 で x1 を出発して時刻 t2 で x2 に到達する.こ
こで,次のように t の 2 次関数で与えられる経路のみを考える.
x(t) = a + bt + ct2
(3.25)
(1) 端点の条件 x(t1 ) = x1 , x(t2 ) = x2 より係数 a, b を c を用いて表せ.
(2) 一様重力下の運動を考える.Lagrangian は
L(x, x)
˙ =
m 2
x˙ − mgx
2
(3.26)
である.上の2次関数の経路について具体的に作用積分 S を計算し,係数 c の関数として与えよ.
(3) 作用が停留値をとる条件 ∂S/∂c = 0 より係数 c を定め,経路を決定せよ.
【問題 3-1-b】単振り子の Lagrangian
˙ =
L(θ, θ)
を θ の4次まで展開すると
m 2 ˙2
l θ − mg cos θ
2
(
)
m 2 ˙2
θ2
θ4
L = l θ + mgl 1 −
+
2
2
24
(3.27)
(3.28)
√
g/l の単振動
が運動方程式の解となる.展開の 4 次までとると運動方程式の解は単振動ではなくなるが,ここで近似的な
となる.展開の2次まで止めると,これは調和振動子の Lagrangian と等価であり,角振動数
解として
θ(t) = A sin ωt
(3.29)
を仮定しよう.ここで,t1 = 0, t2 = 2π/ω とすれば,上の近似解は係数 A によらず,θ(t1 ) = θ(t2 ) = 0 を満
足する.最適な係数 A を求めるために変分原理を用いよう.
(1) 試行関数を用いて作用積分を計算し,A の関数として与えよ.
(2) 作用の停留条件 ∂S/∂A = 0 より,振幅 A と角振動数 ω の関係式を A の二次まで求めよ.
(
)
g
A2
ω2 =
1−
l
8
(3.30)
を導け.
【問題 3-1-c】原点に固定された質量 M の質点のまわりを万有引力を受けて運動する質量 m の質点の Lagrangian
は
L(r, r˙ ) =
mM
m 2
r˙ + G
2
|r|
(3.31)
で与えられる.
(1) 質点が xy 平面内で半径 a,角振動数 ω の等速円運動を行っていると仮定して,1周期 T = 2π/ω にわた
る作用積分
∫
S(a) =
T
Ldt
(3.32)
0
を a の関数として求めよ.
(2) 作用が停留値をとる条件より半径 a と周期 T の関係を求め,この結果がケプラーの第3法則と一致して
いるかどうか確かめよ.
67
3.2
仮想仕事の原理から Hamilton の変分原理を導くこと
これまでは,Hamilton の変分原理 δS = 0 を天下り的に与えて,ここから Lagrange 方程式が導かれるこ
とを示した.ここでは,運動状態に対する仮想仕事の原理 (1.93) 式より変分原理が導かれることを示そう.
仮想仕事の原理を Lagrangian を使って表すと
)
n (
∑
∂
d ∂
−
L({qi }, {q˙i }, t)δqj = 0
∂qj
dt ∂ q˙j
(3.33)
j=1
と書ける.上式の両辺を時間に沿って t1 から t2 まで積分しよう.
)
∫ t2 ∑
n (
d ∂
∂
−
L({qi }, {q˙i }, t)δqj = 0
dt
∂qj
dt ∂ q˙j
t1
(3.34)
j=1
ここで積分第二項目は部分積分できて
)
[
]t2 ∫ t2 (
)
∫ t2 (
d ∂L
∂L
∂L
dt −
δqj = −
δqj
+
dt
δ q˙j
dt ∂ q˙j
∂ q˙j
∂ q˙j
t1
t1
t1
(3.35)
ここで,仮想変位としては必ず始点と終点は固定されているものを考えることにすると δqi (t1 ) = δqi (t2 ) = 0
より右辺第一項目は消えて
∫
t2
t1
)
)
(
∫ t2 (
d ∂
∂L
δqj =
δ q˙j
dt −
dt
dt ∂ q˙j
∂ q˙j
t1
(3.36)
となる.これを用いると (3.33) 式は
∫
t2
dt
t1
n (
∑
∂L
j=1
∂qj
δqj +
∂L
δ q˙j
∂ q˙j
)
∫
t2
=δ
dtL({qi }, {q˙i }, t) = 0
(3.37)
t1
となる.これは正に作用積分の停留条件 δS = 0 に他ならない.
3.3
変分原理に関する補足
3.3.1
Euler-Lagrange 方程式
Hamilton の変分原理から Lagrange 方程式を導く際に,Lagrangian の関数形については何も指定しなかっ
た.したがって,より一般的にある任意の関数 F (x, x,
˙ t) が与えられているとき,汎関数
∫ t2
I[F ] =
F (x, x,
˙ t)dt
(3.38)
t1
が x(t1 ) = x1 , x(t2 ) = x2 のもとで極値をとるための x(t) に対する条件は,
(
)
∂F
d ∂F
−
=0
∂x
dt ∂ x˙
(3.39)
で与えられる.このように,一般に汎関数の極値を与える条件が微分方程式で表されるとき,これを Euler
(オイラー)方程式又は Euler-Lagrange 方程式と呼ぶ.関数 F (x, x,
˙ t) のとり方を変えれば Newton 運動
方程式とは異なる方程式,例えば相対論的運動方程式を導出するような作用積分を作ることも可能である.
3.3.2
汎関数微分について
関数 x(t) の汎関数である S の変分 δS が
∫
δS =
t2
t1
[
d
∂L
−
∂x
dt
68
(
∂L
∂ x˙
)]
δxdt
(3.40)
のように書けるとき,これを
∫
t2
δS =
t1
δS
δxdt
δx
と書いて
δS
∂L
d
=
−
δx
∂x
dt
(
∂L
∂ x˙
(3.41)
)
(3.42)
を汎関数 S[x] の汎関数微分を呼ぶ.これはあくまでも記号の定義であり決して単に δS を δx で割ったもの
ではないことに注意されたい.
(そもそも S は数なのに対して x は t の関数なので,割ることはできない.
)
o(D`-/+n/ahY\;AUjQ^M'
3.3.3 物理学における変分原理
aKPj
b/c)bhIa8Rkjp
mjcVb"%Cn&
`6?nW_jp
n1
KPj(D`/aZH\co
b=7]<SOeXlIp
n2
図 3.4: 屈折率が異なる二つの媒質が接している場合の光の伝播.光の経路は Fermat の原理に従う.
aUjhIa-bBM.UjF^HI;AcoMS
aY\-M>QjhI`
TnJjpQbQ^Lio
力学以外にも,様々な物理法則を変分原理によって記述することが出来る.詳しくは物理数学 2B で学ぶ
`j-/+aE3b!/Fb.k]Gjo^HIh
はずである.例えば,幾何光学における Fermat の原理は次のように表される.
nRk\HWQ^gGjhIXp
Fermat の原理
二点間を伝わる光はその伝播時間を最小にするような経路をたどる.
B$4b9n/nY\@1a*fjQ^
bhI`:5$+c+^dkjp
Fermat の原理から Snell の屈折の法則を導くことができる.例えば図 3.4 のように屈折率が異なる二つの媒
質が接している場合,屈折の法則に従う光の経路は,その伝播時間が最小であるような経路である.
「作用を最小にするように物体の運動が実現する」という記述は,何がしかの「目的」に従って物事が起
こるような感じを与える.このことから,変分原理は単なる物理法則以上に「神の摂理」の現れである,と
いうような意味づけをされていたこともあるようだ.実用的には,演習問題 3-1-a∼c のように運動方程式の
解を変分原理を使って近似的に求めることができる.このような計算方法は変分法と呼ばれる.
69
第 4 章 Hamilton の正準形式
4.1
正準運動方程式
これまでに学んだ Lagrange 形式では,運動を一般化座標 {qi (t)} の時間変化として表した.Lagrange 方程
式から導かれる一般化座標についての運動方程式は,時間に関して2階の微分方程式であった.運動方程式
が2階の微分方程式であることは,運動を決定するにはある時刻における座標と速度を指定する必要がある
ことを示している.このことは,Newton 運動方程式 m¨
r = F を座標と速度に対する連立方程式の形
dr
= v,
dt
m
dv
=F
dt
(4.1)
に書き直してみるとよく理解できる.図 4.1 に示すように,時刻 t における位置と速度が r(t), v(t) であった
とすると,微小時間 ∆t 後における位置と速度は運動方程式に従えば
r(t + ∆t) = r(t) + v∆t,
v(t + ∆t) = v(t) +
F
∆t
m
(4.2)
で与えられる.力 F は通常,座標 r の関数として定められる.よって,ある時刻における座標と速度が次の
瞬間の座標と速度を決めることが分る.
r(t + ∆t) = r(t) + v∆t
v(t + ∆t) = v(t) +
r(t)
F
F
∆t
m
v(t)
図 4.1: 運動方程式に従う位置と速度の時間発展.
これから学ぶ Hamilton 形式では,新たに一般化運動量 {pi (t)} なる量を導入し,運動を {qi (t), pi (t)} の空
間での一階の微分方程式としてとらえる.
Lagrange 形式では,独立変数として一般化座標 {qi (t)} とその時間微分 {qi (t)} を用いて Lagrangian
L({qi }, {q˙i }, t) = T ({qi }, {q˙i }, t) − U ({qi }, t)
(4.3)
を表す.ここで T は運動エネルギー,U はポテンシャルエネルギーである.ただし,力が保存力である場合
を仮定し,ポテンシャルは速度にはよらないとした.ここで,新しい変数として座標 qi に共役な運動量
pi =
∂L
∂ q˙i
(4.4)
を導入しよう.一般化座標に対して上のように定義された運動量を一般化運動量と呼ぶ.一般化運動量の時
間微分は Lagrange 方程式より
d
dt
(
∂L
∂ q˙i
)
∂L
dpi
∂L
⇒
=
∂qi
dt
∂qi
=
(4.5)
で与えられる.
(この式は後で正準運動方程式を導くときに使う.
)通常のデカルト直交座標 {xi } では
∂ ∑ mj x˙ 2j
pi =
= mi x˙ i
(4.6)
∂ x˙ i
2
j
70
となり,普通の運動量と速度の関係に一致する.一般の座標系では,運動量 pi は座標と速度の関数として
pi = pi ({qj }, {q˙j }, t)
(i, j = 1, 2, · · · , n)
(4.7)
のように与えられる.ただし n は系の自由度の数である.
これから学ぶ正準形式では運動の状態を記述する独立変数として,一般化座標 {qi } とそれに共役な一般化
運動量 {pi } を用いる.これらの変数を正準変数と呼ぶ.座標と運動量を独立変数とする関数として,ハミル
トニアン(Hamiltonian)と呼ばれる関数を導入する.
H({qi }, {pi }, t) =
∑
pi q˙i − L({qi }, {q˙i }, t)
(4.8)
i
上式の右辺は q˙i を使って書かれているが,(4.7) を q˙i について解いて
q˙i = q˙i ({qj }, {pj }, t)
(i, j = 1, 2, · · · , n)
(4.9)
と {qi }, {pi } の関数で表すものとする.
ここで,時間 t は変えずに座標と運動量を {qi }, {pi } → {qi + dqi }, {pi + dpi } と微小変化させたときの
Hamiltonian の微小変化 H → H + dH を考えよう.
)
∑
∑(
∂L
∂L
dH =
(dpi q˙i + pi dq˙i ) − dL({qi }, {q˙i }, t) =
dpi q˙i + pi dq˙i −
dqi −
dq˙i
∂qi
∂ q˙i
i
i
) ∑(
)
∑(
∂L
∂L
dqi − pi dq˙i =
q˙i dpi −
dqi
=
dpi q˙i + pi dq˙i −
∂qi
∂qi
i
i
(4.10)
となり,確かに H は座標と運動量を独立変数とする関数であることがわかる.ここで (4.5) 式を使うと
dH =
∑
(q˙i dpi − p˙i dqi )
(4.11)
i
となる.一方,dH は次のように書けるはずである.
)
∑ ( ∂H
∂H
dH =
dqi +
dpi
∂qi
∂pi
(4.12)
i
(4.11) 式と (4.12) を比較すると,座標と運動量に対する運動方程式が以下のように与えられることが分る.
dqi
∂H
=
dt
∂pi
(4.13)
dpi
∂H
=−
dt
∂qi
これらの運動方程式の組は正準運動方程式,あるいはハミルトン (Hamilton) の運動方程式と呼ばれる.
Newton 方程式が時間に関して二階の微分方程式であったのに対して,正準運動方程式は一階の微分方程式
になっている.その代わり,独立変数の数が 2 倍になっている.
簡単な場合として,デカルト直交座標 {xi } を用いて Hamiltonian を具体的に書き下してみよう.まず,
Lagrangian は
L({xi }, {x˙ i }) =
∑ mi
i
2
x˙ 2i − U ({xi })
(4.14)
で与えられる.運動量は前にも求めたように pi = mi x˙ i であるから,Hamiltonian は
[
]
[
]
∑
∑ p2
∑ mi
∑ p2
i
i
2
H({xi }, {pi }) =
pi x˙ i −
x˙ − U ({xi }) =
−
− U ({xi })
2 i
mi
2mi
i
i
∑ p2
i
=
+ U ({xi }) = T + U
2m
i
i
71
i
i
(4.15)
ここで第一項目は
∑ p2
∑ (mi x˙ i )2
∑1
i
=
=
mi x˙ 2i = T
2m
2m
2
i
i
i
i
i
(4.16)
H =T +U
(4.17)
であるから,
となる.
よって,Hamiltonian は力学的エネルギーになる.Hamiltonian から正準方程式を導くと
dxi
∂H
pi
dpi
∂H
∂U
=
=
,
=−
=−
dt
∂pi
mi
dt
∂xi
∂xi
(4.18)
となる.上の二式から運動量 pi を消去すると
mi
∂U
d2 xi
dpi
d2 xi
∂U
=
−
⇒
m
=
=−
i
2
2
dt
dt
∂xi
dt
∂xi
(4.19)
となり,通常の Newton 運動方程式が得られる.
一般の座標系の場合でも,座標変換が時間に陽に依存しない場合は Hamiltonian が力学的エネルギーにな
ることを示そう.デカルト座標は一般化座標の関数として
xi = xi (q1 , · · · , qn )
と与えられるので,速度は
x˙ i =
n
∑
∂xi
j=1
となる.したがって運動エネルギーは
T =
3N
∑
1
i=1
2
mi x˙ 2i =
3N
∑
1
i=1
2
mi
n
∑
∂xi
j=1
∂qj
(4.20)
q˙j
∂qj
2
q˙j =
(4.21)
3N ∑
n ∑
n
∑
1
i=1 j=1 k=1
2
mi
∂xi ∂xi
q˙j q˙k
∂qj ∂qk
(4.22)
と書ける.これは
T =
n ∑
n
∑
1
j=1 k=1
2
Ajk q˙j q˙k , Ajk ({qi }) ≡
3N
∑
i=1
mi
∂xi ∂xi
= Akj ({qi })
∂qj ∂qk
(4.23)
と簡潔に書くこともできる.ポテンシャルが速度に依存しない場合を考えているので, 一般化運動量は
pi =
n
n ∑
n
n
∑
∂L
∂T
∂ ∑∑ 1
∂
1
=
=
Ajk q˙j q˙k =
Ajk
(q˙j q˙k )
∂ q˙i
∂ q˙i
∂ q˙i j=1
2
2
∂
q˙i
j=1
k=1
=
=
n ∑
n
∑
1
j=1 k=1
n
∑
2
k=1
Ajk (δik q˙j + δij q˙k ) =
n
1∑
2
1∑
Aji q˙j
2 j=1
n
Aik q˙k +
k=1
Aij q˙j
(4.24)
j=1
を得る.これより
n
∑
pi q˙i =
i=1
n ∑
n
∑
Aij q˙j q˙i = 2T
(4.25)
i=1 j=1
となる.したがって Hamiltonian は
H = 2T − (T − U ) = T + U
(4.26)
となる.以上より,一般化座標と直交座標の変換関係が時間に陽に依存しない場合は,Hamiltonian は座標
系の取り方によらず力学的エネルギーになる.一般化座標 {qi } とデカルト直交座標 {xi } との変換が時間に
陽に依存しているときは運動エネルギーの表式 (4.22) に速度の一次の項が加わるので,Hamiltonian にも余
分な項が加わる.
(演習問題 4-1-h∼j を見よ.
)
72
補足:独立変数と Legendre 変換
この節の説明では座標 {qi } と運動量 {pi } を独立変数として持つ関数として Hamiltonian の表式を天下り
的に与え,それらの変数に対する正準運動方程式が Hamiltonian によって表されることを示した.このよう
に,独立変数の入れ替えに伴う L → H のような変換をルジャンドル(Legendre)変換と呼ぶ. Legendre
変換は熱力学や統計力学などでもしばしば使われるので,ここで簡単に解説しておこう.
例として,2つの変数 (x, y) を独立変数として持つ関数 f (x, y) を考えよう.変数を (x, y) → (x+dx, y +dy)
と微小変化させたときの f の変化 df (これを関数 f の 全微分 と呼ぶ)は
df = Xdx + Y dy
(4.27)
と書ける.ただし,係数 X, Y は次のように与えられる.
( )
( )
∂f
∂f
X=
, Y =
∂x y
∂y x
(4.28)
物理学ではしばしば,x の代わりに X を独立変数にする必要が出てくる.このとき,x は X と y の関数と
して与えられることになる.さて,ここで適当な関数 g(X, y) を用いて X と x の関係を
(
)
∂g
x=
∂X y
(4.29)
の形に与えるには,g(X, y) をどのように定義すればよいだろうか?実は,g(X, y) を以下のように定義すれ
ばよいことが知られている.
g(X, y) = Xx(X, y) − f (x(X, y), y)
(4.30)
上式では x はもはや独立変数では無く X と y の関数として与えられることに注意せよ.関数 f から g への
変換を Legendre 変換と呼ぶ.独立変数を (X, y) → (X + dX, y + dy) のように微小変化させたときの関数
g の微小変化は次のように書ける.
(
dg =
∂g
∂X
)
(
dX +
y
∂g
∂y
)
dy
(4.31)
X
関数 g の定義 (4.30) 式に従うと
(
)
(
)
( ) (
)
(
)
(
)
∂g
∂x
∂f
∂x
∂x
∂x
=x+X
−
=x+X
−X
∂X y
∂X y
∂x y ∂X y
∂X y
∂X y
(
∂g
∂y
)
(
=X
X
∂x
∂y
)
(
−
X
∂f
∂x
) (
y
∂x
∂y
)
(
−
X
∂f
∂y
)
(
=X
x
∂x
∂y
)
(
−X
X
∂x
∂y
(4.32)
)
−Y =Y
(4.33)
X
となる.以上より,Legendre 変換によって定義された関数 g の全微分は
(
)
( )
∂g
∂g
= −Y,
=x
dg = xdX − Y dy,
∂y X
∂X y
(4.34)
という形で与えられる.
一自由度の系で Lagrangian から Hamiltonian への変換 L(q, q)
˙ → H(q, p) の場合,
x → q,
˙ y → q, f → L
∂L
∂L
X→
= p, Y →
= p˙
∂ q˙
∂q
g → H = pq˙ − L
(4.35)
という対応関係になっている.従ってただちに以下の正準運動方程式を得る.
dH = qdp
˙ − pdq,
˙
q˙ =
73
∂H
∂H
, p˙ = −
∂p
∂q
(4.36)
熱力学では Legendre 変換がよく使われる.例えば,エントロピー S はエネルギー E ,体積 V ,粒子数 N
の関数として与えられ,エントロピーの微分から温度 T , 圧力 P ,化学ポテンシャル µ が以下のように与え
られる.
1
=
T
(
∂S
∂E
)
P
,
=
T
V,N
(
∂S
∂V
)
µ
,
=−
T
E,N
(
∂S
∂N
)
(4.37)
E,V
しかし,熱的な測定はたいていの場合,温度や圧力を制御しつつ行われる.このような場合に独立変数とし
て E, V, N を選ぶよりも実験で直接的に制御しうる T, V, N や T, P, N を選び,これらを独立変数として持つ
熱力学母関数を考える方が便利である.このような母関数として,内部エネルギー E(S, V, N ), Helmholtz 自
由エネルギー F (T, V, N ), Gibbs 自由エネルギー G(T, P, N ), エンタルピー H(S, P, N ), 熱力学ポテンシャル
Ω(T, V, µ) 等がある.これらの母関数はエントロピーの Legendre 変換によって得られる.
74
演習問題
【問題 4-1-a】質量 m の質点のポテンシャル U (x, y, z) の中の運動をデカルト直交座標を使って考える.
(1)Lagrangian L(x, y, z, x,
˙ y,
˙ z)
˙ より一般化運動量 px , py , pz を導け.
(2)Hamiltonian が
1 2
(4.38)
(p + p2y + p2z ) + U (x, y, z)
H=
2m x
となることを示せ.
(3) 正準運動方程式より x, y, z, px , py , pz に対する方程式を導け.また,方程式より px , py , pz を消去すること
により,Newton 運動方程式に帰着することを示せ.
【問題 4-1-b】質点の運動を円柱座標
x = s cos ϕ, y = s sin ϕ, z = z
(4.39)
を使って考えよう.
˙ z)
(1)Lagrangian L(s, ϕ, z, s,
˙ ϕ,
˙ より一般化運動量 ps , pϕ , pz を導け.
(2)Hamiltonian が
(
)
2
p
1
ϕ
H=
p2s + 2 + p2z + U (s, ϕ, z)
2m
r
(4.40)
で与えられることを示せ.
(3) 正準方程式より s, ϕ, z, ps , pϕ , pz に対する運動方程式を導け.
(4) もしもポテンシャル U が角度 ϕ に依存しなければ pϕ = 一定となる (角運動量保存則) を示せ.
【問題 4-1-c】質点の運動を三次元極座標
x = r cos ϕ sin θ, y = r sin ϕ sin θ, z = r cos θ
(4.41)
を使って考える.
˙ ϕ)
˙ より一般化運動量 pr , pθ , pϕ を導け.
(1)Lagrangian L(r, θ, ϕ, r,
˙ θ,
(2)Hamiltonian が
1
H=
2m
(
)
1 2
1
2
2
pr + 2 pθ + 2 2 pϕ + U (r, θ, ϕ)
r
r sin θ
(4.42)
で与えられることを示せ.また,軌道角運動量 L = r × p を用いると
L2 = p2θ +
であり,Hamiltonian を
H=
p2ϕ
sin2 θ
p2r
L2
+
+ U (r, θ, ϕ)
2m 2mr2
(4.43)
(4.44)
と書けることを示せ. (3) 正準方程式より r, θ, ϕ, pr , pθ , pϕ に対する運動方程式を導け.
(4) もしもポテンシャル U が r のみの関数であれば pϕ = 一定となることを示せ.また,このとき
d 2
L =0
dt
となる.これは,中心力では角運動量ベクトル L が保存することから当然の帰結である.
75
(4.45)
【問題 4-1-d】単振子の運動を考える.
(1)
x = l sin θ, y = −l cos θ
(4.46)
として,一般化運動量 pθ を導け.
(2)Hamiltonian が
H=
p2θ
p2θ
+
U
(θ)
=
− mgl cos θ
2ml2
2ml2
(4.47)
となることを示せ.
(3) 正準方程式より θ, pθ に対する運動方程式を導け.
【問題 4-1-e】質量 m1 , m2 の二つの質点が中心力より相互作用している.それぞれの位置座標を r1 , r2 とし
て,二体ポテンシャルを U (|r1 − r2 |) とする.相対座標と重心座標
r = r1 − r2 ,
R=
me r1 + mp r2
me + mp
(4.48)
を使って考える.
r1 = (x1 , y1 , z1 )
m1
r
m2
r2 = (x2 , y2 , z2 )
図 4.2: 相互作用する二つの質点
(1) 重心座標 R と相対座標 r に正準共役な運動量 P, p を導け.
F#4
(2)Hamiltonian
が
?;9=1E7H9?<A=5:,6?!F
P2
p2
0D-3??&'(+'*()'*F"
<
H=
+
+ U (r)
(4.49)
2M
2µ
F8:0,!F2->9.:@,
となることを示せ.
$? %1G
<./?B<;,IF.C-
【問題 4-1-f】二原子分子の Hamiltonian を以下の手続きによって求めよう.
m2
m1
l
m
2
m1
図 4.3: 二原子分子の剛体モデル
76
二原子分子を長さ l の棒でつながれた2つの質点とみなして,その運動を考える(剛体モデル).前問で導い
た,二質点系の運動エネルギーを重心座標と相対座標で表した式を相対座標を極座標を使って表す.
x = l cos ϕ sin θ, y = l sin ϕ sin θ, z = l cos θ
(4.50)
(1)R, θ, ϕ に正準共役な一般化運動量 P, pθ , pϕ を導け.
(2)Hamiltonian が
H=
p2ϕ
P2
p2
+ θ +
2M
2I
2I sin2 θ
(4.51)
となることを示せ.ただし I = µl2 は重心のまわりの慣性モーメントである.
【問題 4-1-g】剛体の平面運動を考える.重心座標を (X, Y ),剛体の回転角を φ,剛体の慣性モーメントを I
とすると
(1) 一般化運動量 PX , PY , pφ を求めよ.
(2)Hamiltonian が
H=
p2φ
1
2
(PX
+ PY2 ) +
+ U (X, Y, φ)
2M
2I
(4.52)
となることを示せ.
(3) 正準運動方程式より X, Y, PX , PY , φ, pφ に対する方程式を求めよ.
【問題 4-1-h】1.5 節の例題 1-5-a で扱った支点が動く振子について,Hamiltonian を導出せよ.この場合,
Hamiltonian は力学的エネルギーに一致するか?また,正準運動方程式より θ に対する運動方程式を導け.
【問題 4-1-i】1.6.1 節で扱った,原点が加速度運動する座標系における Hamiltonian を導出せよ.この場合,
Hamiltonian は力学的エネルギーに一致するか?また,正準運動方程式より x′ , y ′ , z ′ に対する運動方程式を
導け.
【問題 4-1-j】1.6.1 節で扱った,回転座標系における Hamiltonian を導出せよ.この場合,Hamiltonian は力
学的エネルギーに一致するか?また,正準運動方程式より x′ , y ′ , z ′ に対する運動方程式を導け.
77
4.2
位相空間
運動の状態を表すために,位相空間の概念を導入しよう.まず簡単のため,一粒子の一次元的な運動を考
"! #
える.前節で述べたように,ある時刻における座標と運動量 {x(t), p(t)} を決めると,運動方程式によって系
の運動は一意に決まる.このことから「系の力学状態は座標と運動量 {x(t), p(t)} の組によって完全に指定さ
れる」と言うことができる.よって,系の力学状態を {x, p} を軸とする空間(位相空間)内の点(状態点)
で表し系の運動を位相空間内の状態点 {x(t), p(t)} の軌跡が作る曲線として表すことができる.
"
p
√
2mE
0
2E
mω 2
x
図 4.4: 一次元調和振動子の運動の位相空間での軌跡.
簡単な例として,一次元調和振動子を考えよう.Hamiltonian は
H=
p2
mω 2 2
+
x
2m
2
(4.53)
で与えられる.x に対する運動方程式は m¨
x = −mω 2 x であり,一般解は
x(t) = A cos ωt + B sin ωt
(4.54)
p(t) = mω(−A sin ωt + B cos ωt)
(4.55)
で与えられる.運動量は p = mx˙ より
となる.初期条件を x(t = 0) = x0 , p(t = 0) = p0 とすると
x(0) = A = x0 , p(0) = mωB = p0
より
p0
sin ωt
mω
p(t) = −mωx0 sin ωt + p0 cos ωt
x(t) = x0 cos ωt +
(4.56)
(4.57)
(4.58)
を得る.このとき状態点 (x, p) は位相空間内で
H=
p2
mω 2 2
mω 2 2
p2
+
x =
x0 + 0 = E
2m
2
2
2m
(4.59)
で表される楕円上を時計回りに運動する.ここで E は質点の力学的エネルギーである.状態点は位相空間内
の等エネルギー線上を運動することがわかる.エネルギーが異なれば状態点の軌跡も異なる.
以上のように,一粒子の一次元運動は,二次元の位相空間の中の点 (x, p) の軌道運動として表される.三
次元運動の場合,粒子の運動は 6 次元位相空間内の点 (x, y, z, px , py , pz ) の軌道運動として表される.デカ
78
=79) 3DJ*D =.0D
E6;3D;I) >?
/-B
ルト直交座標に限らず一般化座標 {qi } と正準共役な運動量 {pi } を用いて位相空間を表してもよい.N 質
点系の場合,系の力学状態は(拘束条件が無ければ)3N 個の正準変数の組 {qi (t), pi (t)} によって指定され
る.したがって,系の力学状態は {qi , pi } を軸とする 6N 次元位相空間内の点によって表され,運動は状態
=A79=@DJ26/798>?4K8>&(=
点 {qi (t), pi (t)} の軌道運動として表される.一般に,運動の自由度が n である系の状態点は 2n 次元位相空
間内でによって与えられる等エネルギー面(2n − 1 次元の超曲面)の上を運動する.
3D>:#>&(/FD1;?+J
(x(t + ∆t), p(t + ∆t))
(x(t), p(t))
H$>
'>
*C<+
図 4.5: 質点の一次元運動の位相空間での軌跡の例.実線が物理的に実現している軌跡.破線のように,他の
軌跡と交わるような軌跡はあり得ない.
状態点が作る軌跡は決して交わらないことを示そう.状態点 ({qi }, {pi }) が正準運動方程式に従って時間発
展しているものとする.ある時刻 t における状態点 ({qi (t)}, {pi (t)}) が与えられたとすると,微小時間 ∆t 後
の状態点は
qi (t + ∆t) = qi (t) +
∂H
∆t,
∂pi
pi (t + ∆t) = pi (t) −
∂H
∆t
∂qi
(4.60)
によって一意に決まる.したがって一つの状態点は必ず1つの軌道に属するので複数の軌道が交わることは
無い.
(図 4.5 を見よ.
)
ただし,特別な場合として,異なる軌道がある一点で接することは起こり得る.例えば単振子の場合,振
子が真上で静止した状態は運動方程式の解ではあるが,そこから少しずらすと大きく振動するか回転を続け
るどちらかの解に分岐する,不安定な状態である.このように,不安定な定常状態が存在する場合は,この
点で異なる軌道が接することがある.図 4.6 に例を示す.白丸が不安定な定常状態で,ここで静止した状態
が運動方程式の解であるとする.状態点が丁度白丸上にあれば状態点は静止したまま変化しないが,状態点
がこの点からわずかにずれたときにどの軌跡の乗るかは,定常点からのずれによって大きく異なる.
図 4.6: 位相空間における軌跡の分岐の例.白丸が不安定な定常状態を表す.この点で異なる軌跡が接して
いる.
79
演習問題
【問題 4-2-a】一様重力下の一粒子の運動を考える.鉛直上向きの方向を x 軸の正の向きにとると,Hamiltonian
は以下で与えられる.
p2
+ mgx
(4.61)
2m
位相空間内での状態点の軌跡を図示せよ.エネルギー E によって軌跡がどのように変化するか示せ.
H=
【問題 4-2-b】単振子の運動を考える.Hamiltonian は以下で与えられる.
H=
p2θ
− mgl cos θ
2ml2
(4.62)
位相空間内における状態点の軌跡を図示せよ.エネルギー E によって軌跡がどのように変化するか示せ.
【問題 4-2-c】Hamiltonian が
p2
k
− x2 + αx4 (k, α > 0)
(4.63)
2m 2
で与えられているとき,位相空間内で状態点 (x, p) が描く軌跡を図示せよ.エネルギー E によって軌跡がど
のように変化するか示せ.
H=
【問題 4-2-d】Hamiltonian が
p2
k
+ x2 − αx3 (k, α > 0)
(4.64)
2m 2
で与えられているとき,位相空間内で状態点 (x, p) が描く軌跡を図示せよ.エネルギー E によって軌跡がど
H=
のように変化するか示せ.
【問題 4-2-e】質量 m の質点が図 4.7(1)-(3) のポテンシャル中を1次元的に運動しているとき,位相空間内で
状態点 (x, p) が描く軌跡の概形を図示せよ.エネルギー E によって軌跡がどのように変化するか示せ.
(1)
(2)
図 4.7: 1次元ポテンシャル.
80
(3)
【問題 4-2-f】調和振動子を考える.
(1) 位相空間内において全エネルギーが E 以下であるような領域の面積
∫
dxdp
(4.65)
H(x,p)≤E
を求めよ.
(2) 全エネルギーが以下の条件を満たすような運動の状態点は,位相空間内でどのような軌跡を描くか.
H(x, p) = nAω
(n = 0, 1, 2, 3, · · ·) A は適当な定数
(4.66)
n の値を 0, 1, 2, 3 と変化させたときの軌跡を図示せよ.また,そのとき (1) で求めた面積はどうなるか.こ
の問題は量子力学や統計力学と関連があるのだが,その意味については 2 年次後期の量子力学 1A や 3 年次
の統計力学の講義で詳しく学ぶであろう.
81
4.3
Poisson 括弧式
自由度が n である系の力学的状態は,各時刻 t における n 組の正準変数 {qi (t), pi (t)} によって指定される.
したがって,運動に付随する物理量(力学的物理量)は正準変数の関数として与えられる.例えば,運動エ
ネルギー,ポテンシャルエネルギー,角運動量,等である.また,ある物理量を A(t) = A({qi (t)}, {pi (t)})
とすると,その時間微分は
dA ∑
=
dt
i
(
∂A
∂A
q˙i +
p˙i
∂qi
∂pi
)
(4.67)
によって与えられる.正準方程式
q˙i =
を使うと (4.67) 式は
∂H
,
∂pi
dA ∑
=
dt
i
と書ける.ここで
{A, H} ≡
(
p˙i = −
∂A ∂H
∂A ∂H
−
∂qi ∂pi
∂pi ∂qi
∑ ( ∂A ∂H
i
∂H
∂qi
∂qi ∂pi
−
(4.68)
)
∂A ∂H
∂pi ∂qi
(4.69)
)
(4.70)
と表すことにすると,運動方程式は次のように書ける.
dA
= {A, H}
dt
上の括弧式を一般の関数 A({qi (t)}, {pi (t)}), B({qi (t)}, {pi (t)}) にも拡張して定義する.
)
∑ ( ∂A ∂B
∂A ∂B
{A, B} ≡
−
∂qi ∂pi
∂pi ∂qi
(4.71)
(4.72)
i
これを Poisson(ポアソン)の括弧式と呼ぶ.物理量の関数形が時間に陽に依存する場合 A = A({qi }, {pi }, t),
運動方程式は
dA
∂A
= {A, H} +
dt
∂t
(4.73)
となる.
教科書によっては Poisson 括弧式を [A, B] と表すものも少なくない.しかし,同じ記号を量子力学では別
の意味(交換子)で用いるので,この講義では混同を避けるために {A, B} を用いることにする.量子力学で
は,(4.71) に類似した方程式が演算子に対して成り立ち,Poisson 括弧式が量子力学と古典力学の対応付けに
重要な役割を果たす.
82
演習問題
【問題 4-3-a】Poisson の括弧式について,以下の式が成り立つことを示せ.
(1) 任意の力学的物理量 A, B に対して
{A, B} = −{B, A}
(4.74)
{A + B, C} = {A, C} + {B, C}
(4.75)
{A, BC} = {A, B}C + B{A, C}
(4.76)
{AB, C} + {BC, A} + {CA, B} = 0
(4.77)
{A, {B, C}} + {B, {C, A}} + {C, {A, B}} = 0
(4.78)
(2) A, B が力学変数 {qi }, {pi } の場合
{qi , qj } = {pi , pj } = 0
(4.79)
{qi , pj } = δij
(4.80)
【問題 4-3-b】Poisson の括弧式を用いて,以下を導け.
(1) 角運動量 L = r × p に対して
dL
=r×F
dt
(4.81)
(2) 力学的エネルギー H に対して
dH
=0
(4.82)
dt
(3) ある物理量 A(t) = A({qi (t)}, {pi (t)}) について Hamiltonian との Poisson 括弧式がゼロであれば,A は
保存量 (時間に依存しない,一定の量)である.
【問題 4-3-c】角運動量 L = r × p に対して Poisson 括弧式が以下を満たすことを示せ.
{Lx , Ly } = Lz , {Ly , Lz } = Lx , {Lz , Lx } = Ly
【問題 4-3-d】調和振動子の Hamiltonian を考える.
(1) 新しい変数 ξ = p + imωx を導入し,Hamiltonian を ξ を用いて表せ.
(2) ξ と ξ ∗ の Poisson 括弧式 {ξ, ξ ∗ } を求めよ.
(3) Poisson 括弧式を用いて ξ に対する運動方程式を導け.
(4) 上で導いた運動方程式の解を求め,x(t), p(t) を求めよ.
83
(4.83)
第 5 章 正準変換
5.1
座標変換と正準変換
Lagrange 形式で運動を表すには,適当な一般化座標 {qi } で Lagrangian L({qi }, {q˙i }, t) を表せば Lagrange
方程式より運動方程式を導けばよかった.Lagrange 方程式は座標系のとりかたにはよらないので,ある座標
系 {qi } の代わりに別の座標系 {Qi } を選んでもよい.そこで,二種類の座標変数 {qi }, {Qi } の間に,
Qi = Qi (q1 , · · · , qn , t) = Qi ({qi }, t)
(5.1)
という変換関係がある場合を考えよう.どちらの一般化座標も,同じ形の Lagrange 方程式に従う.
d ∂L
∂L
−
= 0,
dt ∂ q˙i
∂qi
d ∂L
∂L
−
=0
˙
dt ∂ Qi
∂Qi
(5.2)
ここで,一般化座標の時間微分(一般化速度)の間の変換関係を考えてみる.Qi の時間微分は
Q˙ i =
∑ ∂Qi
j
∂qj
q˙j +
∂Qi
∂t
(5.3)
と表されるが,∂Qi /∂qj は座標 {qi } の関数であるから,一般化速度の変換関係は
Q˙ i = Q˙ i ({qi }, {q˙i }, t)
(5.4)
のように,座標と速度の関数として表される.
(例えば極座標変換の場合を考えてみればよい.
)
Hamilton の正準形式では,独立変数として一般化運動量を導入し,座標と運動量の組(正準変数)を用い
て運動を表す.一般化座標 qi に共役な一般化運動量は pi = ∂L/∂ q˙i で定義される.このとき一般化運動量は
pi = pi ({qi }, {q˙i }, t)
(5.5)
のように,一般化座標と一般化速度の関数として表される.新しい変数 {Qi } に共役な運動量は Pi = ∂L/∂ Q˙ i
によって定義されるが,(5.5) 式と同様に運動量は一般化座標と一般化速度の関数として
Pi = Pi ({Qi }, {Q˙ i }, t)
(5.6)
のように表される.上で述べた変数の書き換えを,正準変数 {qi }, {pi } から新しい正準変数 {Qi }, {Pi } への
変換と見なすと,一般には
Qi = Qi ({qi }, t),
Pi = Pi ({qi }, {pi }, t)
(5.7)
という形で表されることがわかる.古い正準変数 {qi }, {pi } と新しい正準変数 {Qi }, {Pi } に対する Hamiltonian
をそれぞれ H, H ′ とすると
H=
∑
pi q˙i − L, H ′ =
i
∑
Pi Q˙ i − L
(5.8)
i
である.どちらの正準変数も,Hamilton の正準運動方程式に従う.
q˙i =
∂H
∂H
, p˙i = −
∂pi
∂qi
∂H ′
∂H ′
Q˙ i =
, P˙i = −
∂Pi
∂Qi
84
(5.9)
(5.10)
4.1 節で示したように,直交座標から一般化座標への変換が時間に陽に依存しなければ,Hamiltonian は座標
系のとりかたによらず H = H ′ = 力学的エネルギー である.後で示すように,一般的には,{qi } から {Qi }
への座標変換が時間に陽に依存しなければ H = H ′ である.
ところで,(5.7) 式の変換関係は座標と運動量について非対称な形をしている.つまり,座標から座標への
変換関係は運動量を含まないが,新しい運動量は一般には古い座標と運動量両方を含んだ形で表さている.一
方,正準方程式は力学変数 qi , pi について対称な形をしている.よって,新しい座標変数 Qi への変換として,
もっと一般的に qi と pi が混ざった変換を考えることもできるのではないだろうか.そこで,以下のような,
一般に正準方程式が成り立つ新しい力学変数の組 {Qi }, {Pi } への変換を考え,これを正準変換と呼ぶ.
正準変換
(1) 二種類の一般化座標と運動量の間の変換が
Qi = Qi ({qi }, {pi }, t),
Pi = Pi ({qi }, {pi }, t),
(5.11)
の形で与えられる.
(2) {Qi }, {Pi } の従う運動方程式が {qi }, {pi } の場合と同様,正準運動方程式の形に書ける.
q˙i =
∂H
∂H
∂H ′
∂H ′
, p˙i = −
⇔ Q˙ i =
, P˙i = −
∂pi
∂qi
∂Pi
∂Qi
(5.12)
H と H ′ は同じでなくても良い,
正準変換の例 1:座標回転
座標変換の簡単な例として,二次元運動における座標回転の場合を考えてみよう.
( ) (
)( ) ( ) (
)( )
X
cos ϕ sin ϕ
x
x
cos ϕ − sin ϕ
X
=
,
=
Y
− sin ϕ cos ϕ
y
y
sin ϕ cos ϕ
Y
新しい座標系での Lagrangian は
(5.13)
m ˙2
(X + Y˙ 2 ) − U (X, Y )
2
(5.14)
∂L
˙ PY = ∂L = mY˙
= mX,
˙
∂X
∂ Y˙
(5.15)
L=
である.新しい座標系での運動量は
PX =
で与えられる.時間に陽に依存しない座標変換なので,新しい正準変数での Hamiltonian も力学的エネルギー
H=
1
(P 2 + PY2 ) + U (X, Y )
2m X
で与えられる.また,新しい運動量と古い正準変数の間の変換関係は
(
) (
)( ) ( ) (
)(
)
PX
cos ϕ sin ϕ
px
px
cos ϕ − sin ϕ
PX
=
,
=
PY
− sin ϕ cos ϕ
py
py
sin ϕ cos ϕ
PY
(5.16)
(5.17)
で与えられる.
正準変換の例 2:位置と運動量の交換
座標と運動量が混ざった変数変換の例として,位置と運動量を取り替える変換 (X, P ) = (p, −x) を考えて
みよう.この変換は位相空間の 90◦ 回転に相当する.これは正準変換であろうか?新しい変数に対する運動
方程式を考える.
∂H
X˙ = p˙ = −
,
∂x
∂H
P˙ = −x˙ = −
∂p
85
(5.18)
ここで,偏微分の関係式
∂H
∂X ∂H
∂P ∂H
∂H ∂H
∂X ∂H
∂P ∂H
∂H
=
+
=−
,
=
+
=
∂x
∂x ∂X
∂x ∂P
∂P
∂p
∂p ∂X
∂p ∂P
∂X
(5.19)
を用いれば,以下のように X, P に対する正準方程式を得る.
∂H
X˙ =
,
∂P
∂H
P˙ = −
∂X
(5.20)
したがって,この変換は正準変換である.
(この場合は H = H ′ である.
)
正準変換の例 3:回転座標系
時間に陽に依存する変数変換の例として,回転座標系への変換を考える.
( ) (
)( )
X
cos ωt sin ωt
x
=
Y
− sin ωt cos ωt
y
(5.21)
「力学2」の授業(1.6.2 節)でも学んだように,回転座標系 (5.21) で Lagrangian を表すと
L=
m ˙2
˙ + 1 mω 2 (X 2 + Y 2 ) − U (X, Y, Z, t)
(X + Y˙ 2 + Z˙ 2 ) + mω(X Y˙ − Y X)
2
2
(5.22)
となる.これより一般化運動量は
PX =
∂L
∂L
∂L
= mX˙ − mωY, PY =
= mY˙ + mωX, PZ =
= mZ˙
˙
˙
∂X
∂Y
∂ Z˙
(5.23)
˙ Y˙ , Z˙ について解き直せば
となる.これを X,
PX
PY
PZ
X˙ =
+ ωY, Y˙ =
− ωX, Z˙ =
m
m
m
(5.24)
である.Hamiltonian は
H ′ = PX X˙ + PY Y˙ + PZ Z˙ − L
[(
(
)
(
)
)2 (
)2 (
)2 ]
PX
PY
PZ
m
PX
PY
PZ
= PX
+ ωY + PY
− ωX + PZ
−
+ ωY
+
− ωX +
m
m
m
2
m
m
m
[ (
)
(
)]
PY
PX
1
− mω X
− ωX − Y
+ ωY
+ mω 2 (X 2 + Y 2 ) + U (X, Y, Z, t)
m
m
2
1
(5.25)
=
(P 2 + PY2 + PZ2 ) + U (X, Y, Z, t) − ω(XPY − Y PX )
2m X
となる.これを元の直交座標での Hamiltonian
H=
1 2
(p + p2y + p2z ) + U (x, y, z)
2m x
(5.26)
と比較するために,運動量の変換関係 (px , py , pz ) → (PX , PY , PZ ) がどうなっているか考える.まず,
px = mx,
˙ py = my,
˙ pz = mz˙
(5.27)
である.一方,回転座標系での速度を考えると
py
px
cos ωt +
sin ωt
X˙ = ω(−x sin ωt + y cos ωt) + x˙ cos ωt + y˙ sin ωt = ωY +
m
m
px
py
Y˙ = ω(x cos ωt + y sin ωt) − x˙ sin ωt + y˙ cos ωt = −ωX −
sin ωt +
cos ωt
m
m
である.これらを (5.23) に用いれば,運動量の変換関係
(
) (
)( )
PX
cos ωt sin ωt
px
=
PY
− sin ωt cos ωt
py
86
(5.28)
(5.29)
(5.30)
2
を得る.これは座標の変換関係と同じである.このような変換では PX
+ PY2 = p2x + p2y が成り立つので,
Hamiltonian の変換関係は
H ′ = H − ω(XPY − Y PX ) = H − ωLZ
(5.31)
となる.ここで,LZ = XPY − Y PX は角運動量の Z 成分である.ただし,回転座標変換では
LZ = XPY − Y PX = xpy − ypx = Lz
(5.32)
が成り立つ.以上より,回転座標系での Hamiltonian は力学的エネルギーに余分な項 −ωLZ が加わったもの
になる.
以上の議論では,Lagrangian から出発して一般化運動量を求め,Hamiltonian を導いた.一方,Lagrangian
を持ち出さずに Hamilton の正準運動方程式
x˙ =
∂H
,
∂px
y˙ =
∂H
,
∂py
p˙x = −
∂H
,
∂x
p˙y = −
∂H
∂y
(5.33)
のみを前提として議論を進めることもできる.もしも (x, y, z, px , py , pz ) → (X, Y, Z, PX , PY , PZ ) の変換が
( ) (
)( )
(
) (
)( )
X
cos ωt sin ωt
x
PX
cos ωt sin ωt
px
=
,
=
(5.34)
Y
− sin ωt cos ωt
y
PY
− sin ωt cos ωt
py
で与えられていたとすると,この変換は正準変換であり,変換後の Hamiltonian と正準運動方程式が
H ′ = H − ω(XPY − Y PX )
∂H ′
X˙ =
,
∂PX
∂H ′
Y˙ =
,
∂PY
′
∂H
P˙X = −
,
∂X
(5.35)
∂H
P˙Y = −
∂Y
′
(5.36)
で与えられることは,以下のように示すことができる.
正準運動方程式を新しい座標変数 X, Y を使って書くと
∂H
∂H
X˙ = ω(−x sin ωt + y cos ωt) + x˙ cos ωt + y˙ sin ωt = ωY +
cos ωt +
sin ωt
∂px
∂py
(5.37)
∂H
∂H
Y˙ = ω(x cos ωt + y sin ωt) − x˙ sin ωt + y˙ cos ωt = −ωX −
sin ωt +
cos ωt
∂px
∂py
(5.38)
となる.ここで偏微分の関係式
∂H
∂H ∂PX
∂H ∂PY
∂H
∂H
=
+
=
cos ωt −
sin ωt
∂px
∂PX ∂px
∂PY ∂px
∂PX
∂PY
(5.39)
∂H ∂PX
∂H ∂PY
∂H
∂H
∂H
=
+
=
sin ωt +
cos ωt
∂py
∂PX ∂py
∂PY ∂py
∂PX
∂PY
(5.40)
を用いてまとめると,以下の運動方程式を得る.
∂H
X˙ = ωY +
,
∂PX
∂H
Y˙ = −ωX +
∂PY
(5.41)
∂H
P˙Y = −ωPX −
∂Y
(5.42)
同様にして PX , PY に対する運動方程式を求めると
∂H
P˙X = ωPY −
,
∂X
となる.以上に導いた新しい運動方程式は,一見すると,正準方程式の形になっていないように見える.し
かし,新しい Hamiltonian を (5.31) 式で定義すれば,正準方程式 (5.36) の形に運動方程式を表すことがで
きる.したがって,この変換は正準変換である.このように時間に陽に依存する変数変換の場合,新しい
Hamiltonian は元の Hamiltonian を新しい変数で書き換えたものに,余分な項が加わったものになる.以上
の議論は,Hamiltonian の具体的な関数形にはよらず一般に成り立つ.
87
演習問題
【問題 5-1-a】(1) 変数 (x, p) から新しい (X, P ) への変換 X = X(x, p), P = P (x, p) を考える.
(ただし,変
換は時間に陽に依存しないものとする.
)古い変数 (x, p) が正準変数であり,その時間発展が Hamiltonian H
を用いて正準運動方程式 x˙ = ∂H/∂p, p˙ = −∂H/∂x によって与えられるとする.このとき新しい変数 (X, P )
に対する運動方程式が
∂H
∂H
, P˙ = −{X, P }
X˙ = {X, P }
∂P
∂X
∂X ∂P
∂P ∂X
で与えられることを示せ.ただし {X, P } =
−
である.
∂x ∂p
∂x ∂p
以上より,一自由度の系の時間に陽に依存しない変換が正準変換であるための必要十分条件は
{X, P } = 1
(5.43)
(5.44)
であることがわかる.
(2) 前問を多自由度系に拡張しよう.時間に陽に依存しない変数変換 Qi = Qi ({qi }, {pi }), Pi = Pi ({qi }, {pi })
を考える.古い変数 ({qi }, {pi }) が正準変数であり,その時間発展が Hamiltonian H を用いて正準運動方程
式 q˙i = ∂H/∂pi , p˙ i = −∂H/∂qi によって与えらるとする.このとき新しい変数 ({Qi }, {Pi }) に対する運動方
程式が
Q˙ i =
∑
∑
∑
∑
∂H
∂H
∂H
∂H
{Qi , Qk }
+
{Qi , Pk }
, P˙i =
{Pi , Qk }
+
{Pi , Pk }
∂Qk
∂Pk
∂Qk
∂Pk
k
k
k
(5.45)
k
で与えられることを示せ.
以上より,{Qi }, {Pi } が関係式
{Qi , Pj } = δij , {Qi , Qj } = {Pi , Pj } = 0
(5.46)
を満足していれば,これらは正準変数であリ ({qi }, {pi }) → ({Qi }, {Pi }) の変換が正準変換であることがわ
かる.
【問題 5-1-b】
(1) 正準変数 ({qi }, {pi }) から新しい変数 ({Qi }, {Pi }) への変換を直交行列 A によって
Qi =
∑
Aij qj , Pi =
Aij pj
(5.47)
Aji Ajk = δik
(5.48)
∑ p2
1∑
i
+
Uij qi qj
2m 2 ij
i
(5.49)
j
のように与える.直交行列なので
∑
∑
j
ATij Ajk =
∑
j
j
が成り立つ.この変換が正準変換であることを示せ.
(2)Hamiltonian が
H({qi }, {pi }) =
で与えられているものとする.ただし U は実対称行列 Uij = Uji である.線形代数でも学んだように,実対
称行列 U に対しては
AU AT = K,
88
Kij = δij Ki
(5.50)
とできるような直交行列 A が必ず存在する.ただし Ki は行列 U の固有値である.このような行列 A を (5.47)
式の形の正準変換 ({qi }, {pi }) → ({Qi }, {Pi }) に用いることによって Hamiltonian を
H({Qi }, {Pi }) =
∑ P2
1∑
i
+
Ki Q2i
2m
2
i
i
(5.51)
と出来ることを示せ.これは,質量 m,ばね定数 Ki を持つ独立な調和振動子の集まりと等価であり,運動
方程式の一般解は容易に求まる.
【問題 5-1-c】以下の (x, p) から (X, P ) への変換が正準変換であることを確かめよ.[ヒント:5-1-a(1) の結
果を使う.]
(
(1) X = ln
)
1
sin p ,
x
P = x cot p,
ax
(2) X = arctan
,
p
ax2
P =
2
(
)
p2
1+ 2 2
a x
【問題 5-1-d】以下の (x1 , x2 , p1 , p2 ) から (X1 , X2 , P1 , P2 ) への変換が正準変換であることを確かめよ.[ヒン
ト:5-1-a(2) の結果を使う]
(1) X1 = x1 , P1 = p1 − 2p2 , X2 = p2 , P2 = −2x1 − x2
x2 p2 − x1 p1
p1 − p2
+ 1, X2 = x1 + x2 , P2 =
− (x1 + x2 )
(2) X1 = x1 x2 , P1 =
x2 − x1
x2 − x1
89
5.2
母関数による正準変換の方法
前節では,適当な {qi }, {pi } と {Qi }, {Pi } の変換を天下り的に与え,それらが正準変換になっていること
を確かめた.しかし,一般に正準変換を与えるためには,新しい正準変数への変換 (5.11) と新しい変数が従
う正準運動方程式を与える新しい Hamiltonian を同時に見つけなければならない.これは常に容易なことで
あるとは限らない.そこで,系統的に(天下り的ではなく)正準変換を与える方法として,母関数の方法を
説明する.この方法では,正準方程式そのものを扱うのではなく,作用積分に対する Hamilton の変分原理を
Hamiltonian を使って書き換えたものを用いる.
5.2.1
Hamiltonian による変分原理
Hamilton の変分原理によると力学法則は
∫ t2
δ
L({qi }, {q˙i }, t)dt = 0
(5.52)
t1
の形で与えられたことを思い出そう.ただし,変分は全ての i に対して δqi (t1 ) = δqi (t2 ) = 0 という境界条
件のもとにとるものとする.ここで Lagrangian を Hamiltonian で
L({qi }, {q˙i }, t) =
∑
pi q˙i − H({qi }, {pi }, t)
(5.53)
i
と表して変分原理を書き変えると
]
∫
∫ t2 [∑
pi q˙i − H({qi }, {pi }, t) dt =
δ
t1
t2
t1
i
]
∑[
∂H
∂H
δpi q˙i + pi δ q˙i −
δqi −
δpi dt = 0
∂qi
∂pi
i
となる.積分の第二項目を部分積分して書き換えると
∫ t2
∫
t
pi δ q˙i dt = [pi δqi ]t21 −
t1
t2
∫
p˙i δqi dt = −
t1
(5.54)
t2
p˙i δqi dt
(5.55)
t1
となる.以上をまとめると,Hamilton の変分原理を Hamiltonian を使って表すと
)
(
) ]
∫ t2 ∑ [(
∂H
∂H
δpi − p˙i +
δqi dt = 0
q˙i −
∂pi
∂qi
t1
(5.56)
i
となる.ここで,上式の変分において {qi } と {pi } を独立に変分をとることにすると,δpi と δqi の係数が独
立に 0 でなければならないことから,Hamilton の正準方程式
q˙i =
∂H
,
∂pi
p˙i = −
∂H
∂qi
(5.57)
が導かれる.Hamilton の変分原理では積分の上,下限で δqi (t1 ) = δqi (t2 ) = 0 としていた.ここではさらに
運動量に対しても同様の条件 δpi (t1 ) = δpi (t2 ) = 0 を要求することにする.これにより {qi } と {pi } は対等
になり,これから考えるような座標と運動量を混ぜるような変換に対しても変分原理を用いることができる.
これは,位相空間における変分原理とみなすことが出来る.
5.2.2
母関数による正準変換
正準変数 ({qi }, {pi }) から新しい変数 ({Qi }, {Pi }) への正準変換を考えよう.
Qi = Qi ({qi }, {pi }, t),
Pi = Pi ({qi }, {pi }, t),
(5.58)
qi = qi ({Qi }, {Pi }, t),
pi = pi ({Qi }, {Pi }, t),
(5.59)
90
正準変数 ({qi }, {pi }) は正準運動方程式に従うので,変分原理
]
∫ t2 [∑
δ
pi q˙i − H({qi }, {pi }, t) dt = 0
t1
(5.60)
i
に従う.ここで,新しい正準変数 ({Qi }, {Pi }) に対する正準運動方程式
∂H ′
Q˙ i =
,
∂Pi
を変分原理の形で表すと
∫
t2
δ
[
∑
t1
′
∂H
P˙i = −
∂Qi
(5.61)
]
′
Pi Q˙ i − H ({Qi }, {Pi }, t) dt = 0
(5.62)
i
となる.変分原理 (5.62) より正準運動方程式 (5.61) を導くには,(5.56) 式を導くのと同様な手続きにより
∫
t2
t1
)
(
)
]
∑ [(
∂H ′
∂H ′
Q˙ i −
δPi − P˙i +
δQi dt = 0
∂Pi
∂Qi
i
(5.63)
と変形して,任意の δQi , δPi に対して変分が 0 になることを要請すればよい.(5.62) から導かれる正準運動
方程式が (5.60) から導かれる正準運動方程式と等価なものであるためには,非積分関数が全微分項を除いて
一致していなければならない.具体的には,Lagrangian を新しい変数 ({Qi }, {Pi }) を使って
L=
∑
pi ({Qi }, {Pi }, t)q˙i ({Qi }, {Pi }, t) − H({qi ({Qi }, {Pi }, t)}, {pi ({Qi }, {Pi }, t)}, t)
(5.64)
i
のように表したとき,新しい HamiltonianH ′ ({Qi }, {Pi }, t) と適当な関数 W ({qi }, {Qi }, t) を用いて
L=
∑
i
d
Pi Q˙ i − H ′ ({Qi }, {Pi }, t) + W ({qi }, {Qi }, t)
dt
(5.65)
であることが要請される.ここで,最後の全微分項は以下に示す様に変分に寄与しない.まず,(5.60) の変
分原理を ({Qi }, {Pi }) で書き換えると
]
∫ t2
∫ t2 [∑
d
′
˙
δ
Ldt = δ
Pi Qi − H ({Qi }, {Pi }, t) + W ({qi }, {Qi }, t) dt = 0
dt
t1
t1
(5.66)
i
となる.W の寄与は
[
] t2
d
W ({qi }, {Qi }, t)dt = W ({qi }, {Qi }, t)
= W ({qi (t2 )}, {Qi (t2 )}, t2 ) − W ({qi (t1 )}, {Qi (t1 )}, t)
t1 dt
t1
(5.67)
であるが,境界条件より δqi (t1 ) = δqi (t2 ) = δQi (t1 ) = δQi (t2 ) = 0 なので上式は消える.よって,((5.62) 式
を得る,
∫
t2
以上の考察より,ある適当な関数(これを母関数 と呼ぶ)W によって
∑
i
pi q˙i − H =
∑
i
d
Pi Q˙ i − H ′ ({Qi }, {Pi }, t) + W ({qi }, {Qi }, t)
dt
(5.68)
の関係が成立すれば ({qi }, {pi }) → ({Qi }, {Pi }) の変換は正準変換である.上式を書き換えると次の関係式
を得る.
ところで,
∑
∑
dW
=
pi q˙i −
Pi Q˙ i + H ′ − H
dt
i
i
(5.69)
∑ ∂W
∑ ∂W
dW
∂W
=
q˙i +
Q˙ i +
dt
∂qi
∂Qi
∂t
i
i
(5.70)
91
であるから,
∑(
pi −
i
∂W
∂qi
)
q˙i −
∑(
Pi +
i
∂W
∂Qi
)
∂W
Q˙ i + H ′ − H −
=0
∂t
(5.71)
となる.これが恒等的に成り立つためには q˙i , Q˙ i の係数がそれぞれ 0 となり,さらに余分な項も 0 となる必
要がある.よって,以下の変換の公式を導くことができる.
∂
∂
W ({qi }, {Qi }, t), pi =
W ({qi }, {Qi }, t)
∂Qi
∂qi
∂
H ′ ({Qi }, {Pi }, t) = H({qi }, {pi }, t) + W ({qi }, {Qi }, t)
∂t
Pi = −
(5.72)
特に,変換が時間に陽に依存しないときは H ′ = H である.この母関数の方法では,変換関係が
pi = pi ({qi }, {Qi }, t),
Pi = Pi ({qi }, {Qi }, t)
(5.73)
のような形で与えられる.上式の関係を ({Qi }, {Pi }) について解き直すことによって ({qi }, {pi }) → ({Qi }, {Pi })
の変換が求められる.
【例題 5-2-a】一次元調和振動子について具体的に母関数による正準変換を考えてみよう.Hamiltonian が
H=
p2
k
+ q2
2m 2
(5.74)
で与えられているものとする.
(1) 母関数が W (Q, q) = Qq のときの正準変換を与え,変換後の Hamiltonian を求めよ.
√
(2) 母関数が W (Q, q) = mkQq のときの正準変換を与え,変換後の Hamiltonian を求めよ.
【解答】
(1)
P =−
∂W
= −q,
∂Q
p=
∂W
=Q
∂q
⇒ Q = p, P = −q, H ′ (Q, P ) =
Q2
k
+ P2
2m 2
(5.75)
(5.76)
これは座標と運動量の入れ替えを表す.
(2)
√
√
∂W
∂W
= − mkq, p =
= mkQ
∂Q
∂q
√
P2
p
k
, P = − mkq, H ′ (Q, P ) =
⇒ Q= √
+ Q2
2m
2
mk
P =−
(5.77)
(5.78)
座標と運動量を入れ替えてさらに定数倍しているため,Hamiltonian の関数形が変換前と同じ形になる.
5.2.3
正準変換の形式と母関数
前節で導入した母関数の方法では,W を ({qi }, {Qi }) の関数として与えた.しかし,母関数の独立変数と
して別の変数の組を使うことも可能であり,その方が便利なこともある.例えば,以下の4組の変数を母関
数の独立変数に用いることができる.
I. ({qi }, {Qi })
II. ({qi }, {Pi }) III. ({pi }, {Qi }) IV. ({pi }, {Pi })
92
(5.79)
これまでに説明したやり方は上の I の場合である.これを正準変換 I 型と呼ぶことにしよう.I 型以外の方法
で母関数を表して正準変換を求めるためには,適当な変換(Legendre 変換)をほどこす必要がある.通常,
次の形の母関数を用いる.
I型
II 型
W = WI ({qi }, {Qi }, t)
W = WII ({qi }, {Pi }, t) −
i
III 型
(5.80)
∑
W = WIII ({pi }, {Qi }, t) +
Pi Qi
∑
pi qi
i
IV 型
W = WIV ({pi }, {Pi }, t) +
∑
i
(5.81)
pi qi −
(5.82)
∑
Pi Qi
(5.83)
i
上で与えた母関数を,関係式 (5.69) に用いることにより,正準変換の公式を求めることができる.例えば II
型の場合,
∑ ∂WII
∑ ∂WII
∑
dW
dWII ∑ ˙
∂WII
=
−
(Pi Qi + Pi Q˙ i ) =
q˙i +
P˙i −
(P˙i Qi + Pi Q˙ i ) +
dt
dt
∂qi
∂Pi
∂t
i
i
i
i
(5.84)
であるから
∑ ∂WII
i
∂qi
q˙i +
∑ ∂WII
i
∂Pi
P˙i −
∑
∑
∑
∂WII
(P˙i Qi + Pi Q˙ i ) +
pi q˙i −
Pi Q˙ i + H ′ − H
=
∂t
i
i
i
(5.85)
である.よって
)
)
∑(
∑(
∂WII
∂WII
∂WII ˙
pi −
Pi + H ′ − H −
q˙i +
=0
Qi −
∂qi
∂Pi
∂t
i
i
(5.86)
が成り立つ.q˙i と P˙ i の係数および余分な項が恒等的に 0 であるとおくと,正準変換の公式を得ることができ
る.III 型,IV 型についても同様の手続きを行えばよい.以下に,最終的な結果のみを示す.
正準変換 I 型 W = WI ({qi }, {Qi }, t)
∂
WI ({qi }, {Qi }, t)
∂Qi
∂
pi =
WI ({qi }, {Qi }, t)
∂qi
Pi = −
H ′ ({Qi }, {Pi }, t) = H({qi }, {pi }, t) +
正準変換 II 型
W = WII ({qi }, {Pi }, t) −
∂
WI ({qi }, {Qi }, t)
∂t
(5.87)
∂
WII ({qi }, {Pi }, t)
∂t
(5.88)
∑
i Pi Qi
∂
WII ({qi }, {Pi }, t)
∂Pi
∂
pi =
WII ({qi }, {Pi }, t)
∂qi
Qi =
H ′ ({Qi }, {Pi }, t) = H({qi }, {pi }, t) +
93
正準変換 III 型 W = WIII ({pi }, {Qi }, t) +
∑
i
pi qi
∂
WIII ({pi }, {Qi }, t)
∂pi
∂
Pi = −
WIII ({pi }, {Qi }, t)
∂Qi
qi = −
H ′ ({Qi }, {Pi }, t) = H({qi }, {pi }, t) +
正準変換 IV 型
W = WIV ({pi }, {Pi }, t) +
∑
i pi qi −
∂
WIII ({pi }, {Qi }, t)
∂t
(5.89)
∑
i Pi Qi
∂
WIV ({pi }, {Pi }, t)
∂pi
∂
Qi =
WIV ({pi }, {Pi }, t)
∂Pi
qi = −
H ′ ({Qi }, {Pi }, t) = H({qi }, {pi }, t) +
94
∂
WIV ({pi }, {Pi }, t)
∂t
(5.90)
演習問題
【問題 5-2-a】一次元調和振動子の Hamiltonian を
H(x, p) =
とするとき,母関数 W (x, X) =
mω 2
2 x
p2
1
+ mω 2 x2
2m 2
(5.91)
cot X による正準変換を求め,新しい変数 X, P に対する運動方程式
を解け。
【問題 5-2-b】座標変数 {qi } と {Qi } の間の変換が与えられている場合を考えよう.
qi = fi ({Qi }, t)
(5.92)
この場合は III 型の正準変換を考えて,母関数を
WIII (({pi }, {Qi }, t) = −
∑
pi fi ({Qi }, t)
(5.93)
i
以下のように与えればよいことを示し,正準変換の公式を fi を使って表せ.
【問題 5-2-c】以下のような二次元極座標変換 (x, y) → (r, ϕ) を考える.
x = r cos ϕ, y = r sin ϕ
(5.94)
III 型の正準変換を考えて母関数 WIII を与え,正準変換の公式及び変換後の Hamiltonian の表式を導け.
【問題 5-2-d】回転座標系への座標変換を考える。
X = x cos ωt + y sin ωt
(5.95)
Y = −x sin ωt + y cos ωt
(5.96)
III 型の正準変換を考えて母関数 WIII の表式を与え正準変換の公式及び変換後の Hamiltonian の表式を導け.
95
5.3
5.3.1
正準変換の性質
正準変換の必要十分条件
変数変換
Qi = Qi ({qi }, {pi }, t),
Pi = Pi ({qi }, {pi }, t)
(5.97)
が正準変換であるための条件は,正準変数の Poisson 括弧式が
{qi , qj } = 0,
{pi , pj } = 0,
{qi , pj } = δij
(5.98)
{Qi , Qj } = 0,
{Pi , Pj } = 0,
{Qi , Pj } = δij
(5.99)
のように不変であることを示そう.古い変数が正準変数であり,運動方程式が Hamiltonian H を用いて正準
運動方程式によって与えられているものとする.
q˙i =
∂H
,
∂pi
p˙i = −
∂H
∂qi
(5.100)
もしもこの変数変換が正準変換であれば,新しい変数も正準運動方程式に従う.
∂H ′
Q˙ i =
,
∂Pi
′
∂H
P˙i = −
∂Qi
(5.101)
新しい変数に対する運動方程式は,演習問題 5-1-a(2) の結果 (5.45) 式より
Q˙ i =
∑
∑
∂H
∂H
∂Qi
{Qi , Qk }
{Qi , Pk }
+
+
,
∂Qk
∂Pk
∂t
k
P˙i =
(5.102)
k
∑
k
{Pi , Qk }
∑
∂H
∂H
∂Pi
{Pi , Pk }
+
+
∂Qk
∂Pk
∂t
(5.103)
k
と書くことができる.一方で,変換後の Hamiltonian が母関数 W を用いて
H′ = H +
∂W
∂t
(5.104)
で与えられることから,新しい変数に対する正準運動方程式は
(
)
∂H
∂
∂W
Q˙ i =
+
∂Pi
∂Pi
∂t
(
)
∂H
∂
∂W
˙
Pi = −
−
∂Qi
∂Qi
∂t
(5.105)
(5.106)
と書ける.任意の Hamiltonian に対して (5.102) と (5.105),(5.103) と (5.106) が等価であるためには
{Qi , Qj } = 0, {Pi , Pj } = 0, {Qi , Pj } = δij
(
)
(
)
∂Qi
∂
∂W
∂Pi
∂
∂W
=
,
=−
∂t
∂Pi
∂t
∂t
∂Qi
∂t
(5.107)
(5.108)
である必要がある.逆に,ある変数の組 ({Qi }, {Pi }) の Poisson 括弧式が (5.99) 式を満たしていれば,(5.108)
式を満足する適当な関数 W によって新しい Hamiltonian を H = H ′ +
∂W
∂t
と定義することによって正準運
動方程式 (5.101) 式を満足するようにできる.以上より,(5.107) 式は正準変換の必要十分条件であることが
示された.
5.3.2
正準変換不変量
正準変換において不変に保たれる量がいくつかある.
96
Poisson 括弧式
正準変換後の正準変数による Poisson 括弧式を
{A, B}QP ≡
)
∑ ( ∂A ∂B
∂A ∂B
−
∂Qi ∂Pi
∂Pi ∂Qi
i
(5.109)
と定義し,これに対応して,変換前の変数による Poisson 括弧式を
)
∑ ( ∂A ∂B
∂A ∂B
{A, B}qp =
−
∂qi ∂pi
∂pi ∂qi
(5.110)
i
と書くことにする.任意の力学量 A, B に対して
{A, B}qp = {A, B}QP
(5.111)
が成立すること,つまり正準変換において Poisson 括弧式が不変に保たれることを示すことができる.特に
正準変数については
{Qi , Pj }qp = {Qi , Pj }QP = δij
(5.112)
{Qi , Qj }qp = {Qi , Qj }QP = 0
(5.113)
{Pi , Pj }qp = {Pi , Pj }QP = 0
(5.114)
が成り立つことをすでに示した.任意の力学量に対して Poisson 括弧式が不変であることを示すためには,以
下を用いる.
∑
∂A
=
∂qj
k
(
∂Qk ∂A
∂Pk ∂A
+
∂qj ∂Qk
∂qj ∂Pk
)
,
∑
∂A
=
∂pj
(
k
∂Qk ∂A
∂Pk ∂A
+
∂pj ∂Qk
∂pj ∂Pk
これらを用いて Poisson 括弧式を書き換えると,以下を得る.
[
(
)
∑
∂A ∂B
∂A ∂B
{A, B}qp =
{Qj , Pk }qp
−
∂Qj ∂Pk
∂Pj ∂Qk
jk
∂A ∂B
∂A ∂B
+{Qj , Qk }qp
+ {Pj , Pk }qp
∂Qj ∂Qk
∂Pj ∂Pk
)
(5.115)
]
(5.116)
したがって,({Qi }, {Pi }) が正準変数であれば第二項,第三項が消えて,第二項の j = k の項だけが残り
)
∑ ( ∂A ∂B
∂A ∂B
−
= {A, B}QP
(5.117)
{A, B}qp =
∂Qj ∂Pj
∂Pj ∂Qj
j
が示される.よって,任意の力学量について,Poisson 括弧式が正準変換において不変に保たれることを示す
ことができた.
位相空間の体積
正準変換のその他の性質として,({qi }, {pi }) から ({Qi }, {Pi }) への変換が正準変換であれば,対応する位
相空間の 体積は不変に保たれること,つまり(系の自由度を N とする)
∫
∫
∫
∫
∫
∫
∫
∫
dq1 · · ·
dqN dp1 · · · dqN = dQ1 · · · dQN dP1 · · · dPN
(5.118)
を示すことができる.簡単な例として,1自由度の場合の正準変換 (q, p) → (Q, P ) の場合を考えよう.位相
空間の面積素片はヤコビアンを用いて,以下のように変換される.
∂(q, p) dQdP
dqdp = ∂(Q, P ) 97
(5.119)
ここで
∂q
∂Q
∂(q, p)
= det
∂(Q, P )
∂p
∂Q
∂q
∂P
= ∂q ∂p − ∂q ∂p = {q, p}QP
∂Q ∂P
∂P ∂Q
∂p
∂P
(5.120)
であるが,Poisson 括弧式が正準変換に対して不変であることから {q, p}QP = 1 である.よって
dqdp = dQdP
(5.121)
が導かれる.
一般の N 自由度の場合の正準変換 ({qi }, {pi }) → ({Qi }, {Pi }) において,位相空間の体積素片はヤコビア
ンを用いて以下のように変換される.
∂(q1 , · · · , qN , p1 , · · · , pN ) dQ1 · · · dQN dP1 · · · dPN
dq1 · · · dqN dp1 · · · dqN = ∂(Q1 , · · · , QN , P1 , · · · , PN ) (5.122)
正準変数に対してはヤコビアンが必ず1になること
∂(q1 , · · · , qN , p1 , · · · , pN )
=1
∂(Q1 , · · · , QN , P1 , · · · , PN )
(5.123)
を示せる.
(【問題 5-3-b】)よって正準変換は位相空間の体積を変えないことが示される.この性質は,統計
力学への応用の際に非常に重要になる.
98
演習問題
【問題 5-3-a】正準変換 ({qi }, {pi }) → ({Qi }, {Pi }) において以下の関係式が成り立つことを示せ.
(1)
∂Pi
∂pj
=−
∂qj
∂Qi
(2)
∂Qi
∂pj
=
∂qj
∂Pi
(3)
∂Pi
∂qj
=
∂pj
∂Qi
(4)
∂Qi
∂qj
=−
∂pj
∂Pi
Hint:母関数による正準変換の公式を用いる.問 (1) は I 型,問 (2) は II 型,問 (3) は III 型,問 (4) は IV
型をそれぞれ用いればよい.
【問題 5-3-b】正準変換 ({qi }, {pi }) → ({Qi }, {Pi }) に対して (5.123) 式が成り立つことを示せ.
Hint:合成された変換に対するヤコビアンの性質
∂(q1 , · · · , q3N , p1 , · · · , p3N )
∂(q1 , · · · , q3N , p1 , · · · , p3N )
∂(Q1 , · · · , Q3N , p1 , · · · , p3N )
=
(割り算)
∂(Q1 , · · · , Q3N , p1 , · · · , p3N )
∂(Q1 , · · · , Q3N , P1 , · · · , P3N )
∂(Q1 , · · · , Q3N , P1 , · · · , P3N )
(5.124)
∂(q1 , · · · , q3N , p1 , · · · , p3N )
∂(q1 , · · · , q3N )
=
(約分)
∂(Q1 , · · · , Q3N , p1 , · · · , p3N )
∂(Q1 , · · · , Q3N )
(5.125)
∂(Q1 , · · · , Q3N , p1 , · · · , p3N )
∂(p1 , · · · , p3N )
=
(約分)
∂(Q1 , · · · , Q3N , P1 , · · · , P3N )
∂(P1 , · · · , P3N )
(5.126)
および,前問の結果を用いて,さらに転置行列の行列式はもとの行列式に等しい事(detA = detAT )を用い
ればよい.
【問題 5-3-c】以下の正準変換について,ヤコビアンが1であることを具体的に確かめよ.
(1) 円柱座標への変換 (x, y, z, px , py , pz ) → (s, ϕ, z, ps , pϕ , pz )
(2) 極座標への変換 (x, y, z, px , py , pz ) → (r, θ, ϕ, pr , pθ , pϕ )
99
無限小変換と保存則
5.4
5.4.1
無限小変換の生成子
5.2 節でみたように、正準変換 ({qi }, {pi }) → ({Qi }, {Pi }) は母関数によって生成される.II 型の正準変換
では
Qi =
で与えられる.特に,WII =
∑
∂
∂
WII ({qi }, {Pi }, t), pi =
WII ({qi }, {Pi }, t)
∂Pi
∂qi
は恒等変換を生成する母関数である.つまり
∑
∑
∂ ∑
∂
WII =
qi P i ⇒ Qi =
qj P j = qi , p i =
qj P j = P i
∂Pi
∂qi
(5.127)
i qi Pi
i
j
(5.128)
j
そこで ϵ を微小パラメータとして、恒等変換と少しだけ異なる正準変換
WII =
∑
qi Pi + ϵG({qi }, {Pi })
(5.129)
i
を考える.このような変換を無限小変換とよび,G を無限小変換の生成子という.一般には G の引数は ϵ の
ゼロ次をとって ({qi }, {pi }) と書いても ϵ の一次までは同じ変換を与える.このとき,(5.127) 式より
Qi = qi + ϵ
となる.ここで G の Pi 微分は
∂G
,
∂Pi
pi = Pi + ϵ
∂G
∂qi
∂G
∂G
≃
+ o(ϵ)
∂Pi
∂pi
(5.130)
(5.131)
であるから,pi 微分に置き換えても ϵ の一次までは正しい変換が得られる.従って G による無限小変換
Qi = qi + ϵ
∂G
,
∂pi
Pi = pi − ϵ
∂G
∂qi
(5.132)
を得る.以下に,いくつかの無限小変換の例を示そう.
1. 空間並進:デカルト直交座標を用いて母関数を
G=
∑
Pix =
∑
i
pix + o(ϵ)
(5.133)
Pi = p i
(5.134)
i
おくと
Xi = xi + ϵ,
を得る.つまり,空間並進の生成子は運動量である.
2. 空間回転:簡単のため一粒子の運動を考える.xy 座標を角度 ϕ 回転する場合の変換は
X = x cos ϕ − y sin ϕ, Y = x sin ϕ + y cos ϕ
(5.135)
で与えられる.無限小回転 ϕ = ϵ ≪ 1 のとき,これは
X = x − ϵy, Y = y + ϵx
(5.136)
となる.このよう変換を引き起こすためには,G を以下のように与えればよい.
G = xPy − yPx = xPy − yPx + o(ϵ) = Lz + o(ϵ)
つまり,空間回転の生成子は角運動量である.
100
(5.137)
3. 時間並進(時間発展)t → t + ϵ を考えて,
Qi (t) = qi (t + ϵ), Pi (t) = pi (t + ϵ)
(5.138)
とすると,正準運動方程式より
Qi = qi + ϵq˙i = qi + ϵ
∂H
,
∂pi
Pi = pi + ϵp˙i = pi − ϵ
∂H
∂qi
(5.139)
となる.よって,無限小変換の式において G = H とすればよい.つまり,時間発展の生成子は Hamil-
tonian である.
5.4.2
ネーターの定理
生成子 G による無限小変換 ({qi }, {pi }) → ({Qi }, {Pi }) に対して任意の物理量 A({qi }, {pi }) は以下のよう
な変換を受ける.
A({Qi }, {Pi }) = A
({
} {
})
)
∑ ( ∂A ∂G
∂G
∂A ∂G
∂G
qi + ϵ
−
, pi − ϵ
= A({qi }, {pi }) + ϵ
∂pi
∂qi
∂qi ∂pi
∂pi ∂qi
i
= A({qi }, {pi }) + ϵ{A, G}
(5.140)
特に物理量 A として A = H (Hamiltonian)とすれば
H({Qi }, {Pi }) = H({qi }, {pi }) + ϵ{H, G} = H({qi }, {pi }) − ϵ
dG
dt
(5.141)
が成り立つ.もしも H({Qi }, {Pi }) = H({qi }, {pi }),つまり生成子 G によって引き起こされる無限小変換に
関して Hamiltonian が不変であれば,dG/dt = 0,つまり G は保存量となる.つまり
無限小変換によって Hamiltonian が不変であれば、変換の生成子 G は保存量である.
これをネーター(Noether)の定理という.一般に,系に何かの操作(例えば座標軸の回転)をしても Hamil-
tonian が不変であるとき,この Hamiltonian はこの操作に関して対称であるという.ネーターの定理は,系
の対称性と物理量の保存則の関係を表すもので,非常に重要な定理である.
対称性と保存則の例
1. 空間が一様(並進対称)ならば、運動量が保存する.
H({ri + a}, {pi }) = H({ri }, {pi })
d ∑
⇒
pi = 0
dt i
(5.142)
2. 空間が等方的(回転対称)ならば、角運動量が保存する.
H(x − ϵy, ϵx + y, z, px − ϵy, ϵpx + py , pz ) = H(x, y, z, px , py , pz )
d
d
⇒ Lz = (xpx − ypx ) = 0
dt
dt
(5.143)
3. 時間が一様(時間並進対称)ならば、エネルギーが保存する.
H({ri (t + ϵ), {pi (t + ϵ)}) = H({ri }, {pi })
d
⇒ H=0
dt
101
(5.144)
第 6 章 微小振動
力学系が行う運動の中でよく見られるのは,系が安定なつり合いの位置の近くで行う微小振動とよばれる
運動である.系の安定なつり合いはポテンシャルエネルギー U ({qi }) が極小になる位置に対応する.系がそ
の位置からわずかにずれると復元力 −∂U/∂qi が働き振動を行うのである.この章では力学系の微小振動の一
般的な取り扱いについて説明する.
6.1
1次元の微小振動
ポテンシャル U (x) の中を1次元的に運動している質量 m の質点を考える.この系の Lagrangian は
m 2
x˙ − U (x)
2
L(x, x)
˙ =
(6.1)
で与えられる.ポテンシャル U (x) は x = x0 で極小値をとるものとしよう.点 x0 近傍でポテンシャルは
dU 1 d2 U U (x) ≃ U (x0 ) +
(x
−
x
)
+
(x − x0 )2 + ·
(6.2)
0
dx x=x0
2 dx2 x=x0
と展開できる.ここで,ポテンシャルが極小であることより
dU =0
dx x=x0
(6.3)
d2 U >0
dx2 x=x0
(6.4)
となる.よって,極小点近傍でのポテンシャルは
d2 U k=
>0
dx2 x=x0
k
U (x) = U (x0 ) + (x − x0 )2 ,
2
(6.5)
と書ける.ここで,ポテンシャルエネルギーと位置の原点をずらして U (x0 ) = 0, x0 = 0 と置けば
U (x) =
k 2
x
2
(6.6)
となる.Lagrangian は
m 2 k 2
x˙ − x
2
2
となる.これは調和振動子の Lagrangian である.これに対応する運動方程式は
L(x, x)
˙ =
m¨
x = −kx
(6.7)
(6.8)
であり,一般解は以下で与えられる.
√
x = A sin(ωt + α),
ω=
k
m
(6.9)
今までの話を,より一般的な1自由度の系に拡張することができる.一般化座標を用いて Lagrangian を書
き下すと,一般には
L(q, q)
˙ =
1
a(q)q˙2 − U (q)
2
102
(6.10)
という形になる.第一項目は運動エネルギーを表す.ポテンシャルが q = q0 付近で極小とすると,q0 付近
では
1 d2 U U (q) = U (q0 ) +
(q − q0 )2
2 dq 2 q=q0
(6.11)
となる.ポテンシャルエネルギーの原点をずらして U (q0 ) = 0 とおき,一般化座標の極小点からの変位を
x = q − q0 と書くと,ポテンシャルは
U≃
k 2
x ,
2
k≡
d2 U >0
dq 2 q=q0
(6.12)
となる.運動エネルギーは q˙ = x˙ より
1
a(q)x˙ 2
2
となるが,係数 a(q) も平衡点 q0 の周りで展開できて
da a ≃ a(q0 ) +
x + ···
dq q=q0
T =
(6.13)
(6.14)
と展開することができる.しかし運動エネルギーの表式 (6.13) はすでに x˙ について2次である.したがって
微小変位で展開した場合の最低次の近似としては a は最初の定数項のみとればよい.よって
a(q) ≃ a(q0 ) = m
(6.15)
と書く事にすると,運動エネルギーは
m 2
x˙
2
となり,一般的な1自由度系の微小振動はやはり調和振動子の Lagrangian
T ≃
L(x, x)
˙ =
m 2 k 2
x˙ − x
2
2
(6.16)
(6.17)
によって記述される,この Lagrangian から導かれる運動方程式の一般解は (6.9) で与えられる.以上のこと
からわかることは,1自由度の系の安定な平衡点近傍での運動は1次元調和振動子の運動と等価になる,と
いうことである.
6.2
6.2.1
多自由度系の微小振動
微小振動の Lagrange 方程式
次に多自由度の力学系の微小振動を考えよう.Lagrangian は
L({qi }, {q˙i }) = T ({qi }, {q˙i }) − U ({qi })
(6.18)
という形で与えられるが,以前にも述べたように,一般的に運動エネルギーは速度の二次形式で
T =
1 ∑∑
Tij ({qi })q˙i q˙j
2 i j
(6.19)
(0)
という形に書ける.一方,ポテンシャルが qi = qi において極小値をとるとすると
∂U =0
∂qi {qi =q(0) }
(6.20)
i
が成り立つ.微小変位 xi を
(0)
xi = qi − qi
103
(6.21)
によって導入し、ポテンシャル U を2次まで展開すると
∂ 2 U Uij =
∂qi ∂qj {qi =q(0) }
1 ∑∑
U=
Uij xi xj ,
2 i j
(6.22)
i
と書ける.ただしポテンシャルは極小値からはかることにする.定義より明らかに係数行列 Uij は対称行列
Uij = Uji
(6.23)
である.線形代数で学んだように,対称行列は必ず実数の固有値を持つ.さらに,ポテンシャルの極小付近
で展開した場合,Uij の固有値は必ず正でなければならない(つまり Uij は正定値行列である).運動エネル
ギーは q˙i = x˙ i より
T =
1 ∑∑
Tij ({qi })x˙ i x˙ j
2 i j
(6.24)
と書ける.係数 Tij については1自由度の場合と同様にポテンシャル極小の位置における値をとればよいので
(0)
Tij ({qi }) = Tij
(6.25)
と書くことにすると,運動エネルギーは
1 ∑∑
Tij x˙ i x˙ j
2 i j
(6.26)
1∑
1∑
Tij x˙ i x˙ j −
Uij xi xj
2 i,j
2 i,j
(6.27)
T ≃
となる.よって微小振動の Lagrangian として
L=
を得る.運動方程式は
∑
∑
d ∂L
∂L
−
=
Tij x
¨j +
Uij xj = 0
dt ∂ x˙ i
∂xi
j
j
(6.28)
となる.以上の結果は,多自由度系の微小振動についてポテンシャルの関数形や座標系の取り方によらず一
般的に成り立つ.
6.2.2
基準振動と基準座標
特性方程式と固有振動数
微小振動の運動方程式
∑
j
Tij x
¨j +
∑
Uij xj = 0
(6.29)
j
の解を求めるために,解の形を
xi (t) = ai eiωt
(6.30)
に仮定する.これを (6.29) 式に代入すると
∑
(−ω 2 Tij + Uij )aj = 0
(6.31)
j
を得る.これを行列とベクトル
T11 T12
T1n
T2n
T21 T22
,
T =
..
.
Tn1 Tn2
U11 U12
U1n
U2n
U21 U22
,
U =
..
.
Tnn
Un1 Un2
104
Unn
a1
a2
a=
..
.
an
(6.32)
を用いて表すと
(−ω 2 T + U )a = 0
(6.33)
となる.これが a ̸= 0 の非自明な解を持つためには,係数行列 −ω 2 T + U が逆行列を持たないことが必要と
なる.すなわち,その行列式がゼロでなければならない.
det(−ω 2 T + U ) = 0
(6.34)
この方程式は,特性方程式,永年方程式などと呼ばれる.その解として得られた ω は固有振動数と呼ばれる.
この方程式は ω 2 について n 次の代数方程式であり,n 個の解を持つ.特性方程式の解 ω12 , · · · , ωn は全て実数
であることが示される.また,これらが全て正であるとき,系は xi = 0 のまわりで微小振動を行い,xi = 0
は安定な平衡点である.もしも ωi2 < 0 となる固有振動数がある場合は,運動が指数関数的に増大するため微
小振動を行わず不安定な平衡点となる.
固有ベクトルの直交性
特性方程式の固有値 ωi2 に対する固有ベクトルを a(i) とする.このとき二つの異なる固有値 ωk2 ̸= ωl2 に対
して
(−ωk2 T + U )a(k) = 0
(6.35)
(−ωl2 T + U )a(l) = 0
(6.36)
(6.35) 式と a(l) の内積および (6.36) 式と a(k) の内積をとると
∑ (l)
∑ (l)
(k)
(k)
ai Tij aj +
ai Uij aj = 0
−ωk2
ij
−ωl2
∑
(6.37)
ij
(k)
(l)
ai Tij aj +
∑
(k)
(l)
ai Uij aj = 0
(6.38)
ここで (6.38) 式において T と U が実対称行列であることを用いると
∑ (l)
∑ (l)
(k)
(k)
−ωl2
ai Tij aj +
ai Uij aj = 0
(6.39)
ij
ij
ij
ij
よって (6.37) 式から (6.39) 式を引くと
(ωl2 − ωk2 )
∑
(l)
(k)
ai Tij aj
=0
(6.40)
ij
となる.ここで ωl2 ̸= ωk2 を仮定しているので
∑
(l)
(k)
ai Tij aj
=0
(6.41)
を得る.このような関係式を直交性という.k = l に対しては
∑ (k)
(k)
ai Tij aj = 1
(6.42)
ij
ij
となるように規格化しておくと
∑
(l)
(k)
ai Tij aj
= δlk
(6.43)
ij
となる.これを正規直交条件という.また,(6.43) 式を (6.37) 式に代入すると
∑ (l)
(k)
ai Uij aj = δkl ωk2
ij
を得る.
105
(6.44)
基準座標
x1 , x2 , · · · , xn の代わりに新しい座標 X1 , X2 , · · · , Xn を
xi =
n
∑
(k)
ai Xk
(6.45)
k=1
(k)
により導入する.ただし ai
は規格化された固有ベクトルである.この新しい座標を使って Lagrangian を
表してみよう.まず運動エネルギーは
1 ∑∑
1∑ ˙2
1 ∑∑∑
(k) (l)
Tij ai aj X˙ k X˙ l =
δkl X˙ k X˙ l =
Xk
T =
2
2
2
ij
k
l
k
l
となる.また,ポテンシャルは
1 ∑∑
1∑
1 ∑∑∑
1∑ 2 2
(k) (l)
U=
Uij xi xj =
Uij ai aj Xk Xl =
δkl ωk2 Xk Xl =
ωk Xk
2
2
2
2
ij
ij
k
l
k
となる.よって Langrangian は
L=
(6.46)
k
l
1∑ ˙2
(Xk − ωk2 Xk2 )
2
(6.47)
k
(6.48)
k
となり n 個の独立な調和振動子の Lagrangian の形に書ける.Lagrange 方程式より
¨ k + ωk2 Xk = 0
X
(6.49)
Xk = Ak cos(ωk t + αk )
(6.50)
となり,その一般解は
で与えられる.これを用いて xi は
xi =
∑
(k)
ai Ak cos(ωk t + αk )
(6.51)
k
と与えられる.2n 個の定数 A1 , · · · , An , α1 , · · · , αn は初期条件より決まる.初期条件としては,例えば t = 0
における位置と速度
x1 (0), x2 (0), · · · , xn (0), x˙ 1 (0), x˙ 2 (0), · · · , x˙ n (0)
(6.52)
を与えればよい.このように,一般化座標 Xk は系の微小振動を求める際に基本的な役割を果たす.これを
基準座標と呼び,対応する固有振動を基準振動と呼ぶ.
二次形式の対角化
基準座標で Lagrangian を表すことは,二次形式を対角化することと等価であることを示そう.座標変数を
ベクトルで表して
x1
.
.
x=
.
xn
(6.53)
とすると,Lagrangian は
1 T
1
x˙ T x˙ − xT U x
2
2
と書ける.ただし,T, U は前に定義した行列である.新しい座標変数をベクトル
X1
.
.
X=
.
Xn
L=
106
(6.54)
(6.55)
で表し,特性方程式の固有ベクトル a(k) を n 個並べて作った n × n 正方行列
(1)
(n)
(2)
a1 a1
a1
(1) (2)
(n)
a2
a2 a2
A=
..
.
(1)
(2)
(6.56)
(n)
an an
an
を考えると,(6.45) 式の変数変換は
x = AX
(6.57)
と書ける.よって,Lagrangian を新しい座標変数で表すと
L=
1 ˙T T
˙ − 1 XT AT U AX
X A T AX
2
2
(6.58)
となる.ここで,(6.43) 式と (6.44) 式が
10
0 1
AT T A = I ≡
..
.
00
0
ω12 0
0
0
0 ω22
AT U A =
..
.
0
,
0 0
1
(6.59)
ωn2
と書けることより (6.48) 式を得る.
6.2.3
Hamiltonian による記述
多自由度系の微小振動を Hamiltonian によって記述することもできる.微小振動の Lagrangian (6.27) か
ら出発しよう.一般化運動量は
pi =
∑
∂L
=
Tij x˙ j
∂ x˙ i
j
(6.60)
と書ける.行列 T の逆行列を T˜ とすると
x˙ i =
∑
∑
T˜ij pj ,
j
T˜il Tlj = δij
(6.61)
lk
と書けるので,運動エネルギーは
T =
∑
∑
1∑˜
1∑
Tij
T˜ik pk
T˜jl pl =
Tij pi pj
2 ij
2 ij
(6.62)
1∑˜
1∑
Tij pi pj +
Uij xi xj
2 ij
2 ij
(6.63)
∑
∂H
=
T˜ij pj
∂pi
j
(6.64)
∑
∂H
=−
Uij xj
∂xi
j
(6.65)
k
となる.よって Hamiltonian は
H=
l
となる.
正準運動方程式は
x˙ i =
p˙i = −
となる.(6.64) をもう一度時間微分して (6.65) を使うと
x
¨i =
∑
T˜ij p˙j = −
j
∑
jk
107
T˜ij Ujk xi
(6.66)
を得る.これをベクトル方程式の形に表すと
¨ = −T −1 U x
x
(6.67)
となる.両辺に行列 T をかければ,これは Lagrange 方程式から導いた運動方程式と全く同じ形になる.
新しい正準変数への変換を
x = AX, p = BP
(6.68)
によって与える.ここで A は (6.56) 式で定義された行列である.行列 B は P が X に共役な正準運動量にな
るように定める.すなわち,Poisson 括弧式が {xi , pj } = {Xi , Pj } = δij であることより
{xi , pj } =
∑∑
k
Aik Bjl {Xk , Pl } =
l
∑
Aik Bjk = δij
(6.69)
k
したがって
AB T = 1 ⇒ B = (AT )−1
(6.70)
を得る.(6.68) 式を Hamiltonian (6.63) に代入すると,運動エネルギー項は
T =
1 ∑∑∑ ˜
1∑ T˜
Tij Bik Bjl Pk Pl =
(B T B)ij Pi Pj
2 ij
2 ij
k
(6.71)
l
となるが,ここで
B T T˜B = [(AT )−1 ]T T −1 (AT )−1 = (AT T A)−1 = I
であるから
T =
1∑ 2
P
2 i i
(6.72)
(6.73)
となる.ポテンシャルの表式はすでに (6.47) 式で与えられているので,Hamiltonian は
H=
1∑ 2
(Pi + ωi2 Xi2 )
2 i
(6.74)
となる.これは,二次形式の Hamiltonian が線形変換(正準変換)によって「対角化」されたことを表して
いる.
108
演習問題
【6-2-a】質量 m の二つの質点が図 6.1 のようにバネ定数 k のバネにつながれている.両端は壁に固定されて
いる.質点の平衡位置からの変位をそれぞれ x1 , x2 とする(右向きの変位を正,左向きの変位を負とする).
図 6.1:
(1) Lagrangian を x1 , x2 , x˙ 1 , x˙ 2 の関数として与えよ.ただし平衡位置をポテンシャルの原点とする.x1 , x2
に対する運動方程式を求めよ.
(2) 上で求めた運動方程式の基準振動解として x1 = a1 eiωt , x2 = a2 eiωt を仮定し,a1 , a2 が満たすべき方程
式を求めよ.
(3) a1 , a2 がどちらもゼロでない解(非自明解)が存在するための条件より,ω が満たすべき方程式を導け.
また,その解として固有振動数(基準振動数)ω1 , ω2 を求めよ.ただし ω1 < ω2 とする.
(i)
(i)
(4) 上で求めた固有振動数 ω1 , ω2 に対応する固有ベクトル(基準モード)a1 , a2 (i = 1, 2) を求めよ.ただ
(i)
(i)
し |a1 |2 + |a2 |2 = 1 となるように規格化すること.
(1)
(2)
(1)
(5) 上で求めた固有ベクトルを用いて,新しい座標変数を x1 (t) = a1 X1 (t) + a1 X2 (t), x2 (t) = a2 X1 (t) +
(2)
a2 X2 (t) によって定義する.問 (1) で求めた Lagrangian を X1 , X2 , X˙ 1 , X˙ 2 の関数として与え,固有振動数
ω1 , ω2 を用いて表せ.
【6-2-b】固体中の原子の振動(格子振動)を表す簡単な模型(デバイモデル)を考えよう.簡単のため,N
個の原子が直線上にに並んでいるとする1次元格子模型を考える(図 6.2).平衡状態では原子は間隔 l で並
んでいるものとして,時刻 t における j 番目の原子の変位を ψj (t) とする.各原子は互いに隣り合う原子と
のみ相互作用をし,その相互作用は調和振動子で近似できるものとする.そのばね定数を K と書くと,全系
のポテンシャルエネルギーは
U=
N
∑
1
j=0
2
K(ψj+1 − ψj )2
(6.75)
となる.ただし 0 番目と N + 1 番目については両端が固定されているので時刻によらず ψ0 = ψN +1 と定義
する.一方,原子の質量を m とすると運動エネルギーは
T =
N
∑
1
j=1
2
109
mψ˙ j2
(6.76)
図 6.2: 1次元格子模型.
で与えられる.
(定義より ψ˙ 0 = ψ˙ N +1 = 0 であるから j = 0, N + 1 を和に含めても含めなくても変わりは無
い.
)よって,この系の Lagrangian は
L=T −U =
N
∑
1
j=1
2
mψ˙ j2 −
N
∑
1
i=0
2
K(ψj+1 − ψj )2
(6.77)
で与えられる.
(1) Lagrange 方程式
∂L
d ∂L
−
dt ∂ ψ˙ j
∂ψj
(6.78)
mψ¨j = K(ψj−1 − 2ψj + ψj+1 )
(6.79)
より ψj に対する運動方程式を導け.
【略解】
(2) 上で導いた運動方程式の固有振動解として
ψj (t) = A sin(kj)eiωt
(6.80)
を仮定する.これを運動方程式に代入することによって ω と k の関係を求めよ.また,境界条件 ψ0 = ψN +1 = 0
より k として取り得る値は以下に限られることを示せ.
kn =
π
n,
N +1
n = 1, 2, · · · , N
特に,n の上限が原子数 N によって制限される理由を説明せよ.
110
(6.81)
【略解】
ωk2 =
2K
(1 − cos k)
m
(6.82)
境界条件より
sin[k(N + 1)] = 0, ⇒ k(N + 1) = πn (n = 1, 2, 3, · · ·)
(6.83)
n = 0 は恒等的に ψi = 0 を与えるので除外する.また,
kn+N +1 = π
2N + 2 + n − 1 − N
N +1−n
= 2π − π
= 2π − kN +1−n
N +1
N +1
(6.84)
よって任意の j に対して
sin kn+N j = − sin kN +1−n j
(6.85)
が成り立つので,n → n + N + 1 としても同じ固有振動解を表す.n = 1, 2, 3, · と変化するとき N + 1 − n は
N, N − 1, N − 2 · · · と変化するので 1 から N までとれば十分である.
(3) ψj (t) を固有モードで展開して,
√
ψj (t) =
2 ∑
qk (t) sin(kj)
N +1
(6.86)
k
としよう.qk (t) は基準座標である.このとき,固有モードには以下の「直交性」が成り立つことを証明せよ.
N
∑
sin(kn j) sin(km j) =
j=0
1
δnm (N + 1)
2
(6.87)
【略解】
N
∑
1∑
1∑
sin kn j sin km j =
[cos(kn − km )j − cos(kn + km )j] =
(cos kn−m j − cos kn+m j)
2 j=1
2 j=0
j=0
N
N
n
1 − (−1)
(kn ̸= 0)
cos(kn j) =
2
N + 1
(kn = 0)
j=0
まず,以下を証明する.
N
∑
(6.88)
(6.89)
そのために,以下の和を考える.
N
∑
eikn j =
j=0
N
∑
( ikn )j
1 − (eikn )N +1
e
=
1 − eikn
j=0
(6.90)
分子は kn = πn/(N + 1) であることから
[
1−e
ikn (N +1)
となる.ただし n = 0 のときは
∑N
]
π
= 1 − exp i
n(N + 1) = 1 − (−1)n
N +1
1 = N + 1 となるので
n
N
1 − (−1) (kn ̸= 0)
∑
ik
1−e n
eikn j =
j=0
N +1
kn = 0
(6.91)
j=0
(6.92)
となる.この式の実部をとれば (6.89) が得られる.(6.89) を (6.88) に用いると,kn ̸= km のとき任意の自然数
(n, m) に対して (−1)n−m = (−1)n+m より和はゼロとなる.kn = km のときは (−1)n+m = 1 より cos kn+m j
の和はゼロとなり
N
∑
N +1
sin2 (kn j) =
(6.93)
2
j=0
111
を得る.よって直交関係 (6.87) を得る.
(4) Lagrangian を qk を使って書き直せ.
【略解】運動エネルギーは
1 ∑ m ˙2
1 2 ∑∑∑
1 2 ∑∑
N +1
ψj =
q˙k q˙k′ sin(kj) sin(k ′ j) =
q˙k q˙k′
δkk′
2 j=1 2
2 N + 1 j=1
2N +1
2
′
′
N
T =
N
k
1∑ 2
=
q˙k
2
k
k
k
(6.94)
k
ポテンシャルエネルギーは
∑
1∑
1∑
2
U=
K(ψj+1 − ψj )2 =
K(ψj+1
+ ψj2 − 2ψj ψj+1 ) =
K(ψj2 − ψj ψj+1 )
2 j=0
2 j=0
j=0
N
N
N
∑
k
√
k
1∑
1∑
(ψj ψj+1 + ψj−1 ψj ) =
ψj (ψj+1 + ψj−1 )
2 j=1
2 j
N
√
2 ∑
2 ∑
qk [sin k(j + 1) + sin k(j − 1)] = 2
qk cos k sin(kj)
N +1
N +1
k
N
∑
ψj ψj+1 =
j=0
U=
∑
(6.97)
(6.98)
k
N
∑
∑
2 ∑∑
qk qk′ cos k ′
sin(kj) sin(k ′ j) =
qk2 cos k
N +1
′
j=1
k
よって
(6.96)
k
N
ψj ψj+1 =
j=0
ψj+1 + ψj =
∑
2 ∑∑∑
qk qk′ sin(kj) sin(k ′ j) =
qk2
N + 1 j=0
′
(6.95)
N
ψj2 =
j=0
N
∑
N
k
K(1 − cos k)qk2 =
∑ m 2K
k
2 m
k
以上より Lagrangian は
L=
(6.99)
k
(1 − cos k)qk2 =
∑ (1
1
mq˙2 − mωk2 qk2
2 k 2
k
∑m
k
2
ωk2 qk2
(6.100)
)
(6.101)
となる.これは角振動数 ωk を持つ N 個の独立な調和振動子の Lagrangian と同じ形を持つ.
(5) 正準運動量を
pk =
で定義し,Hamiltonian を
H=
∑
∂L
∂ q˙k
pk q˙k − L
(6.102)
(6.103)
k
によって与えよ.
【略解】
)
∑( 1
1
2
2 2
p + mωk qk
H=
2m k 2
k
角振動数 ωk を持つ N 個の独立な調和振動子の Hamiltonian と同じ形になる.
112
(6.104)
6.3
連続体の振動
演習問題で考えた1次元格子模型において,原子数 N が非常に大きく振動が空間的に十分にゆるやかであ
るとき,この系を連続体とみなすことができる.Lagrangian (6.77) において原子数 N を無限に持っていき,
かつ質点の間隔 l をゼロに持って行く極限(連続体極限)を考えてみよう.このとき,線密度 σ = m/l を一
定にし,さらに e = Kl も一定に保つような極限を考える.そこで,Lagrangian を以下のように書き直す.
[
[
(
)2 ]
(
)2 ]
N
N
∑
∑
1 m ˙2 1
ψj+1 − ψj
1 ˙2 1
ψj+1 − ψj
L=l
ψ − Kl
=l
σψ − e
(6.105)
2 l j 2
l
2 i
2
l
j=0
j=1
ここで,原子の番号 j を連続変数 x = jl に置き換えて,差分を微分で置き換えると
ψj+1 − ψj
ψ(x + l) − ψ(x)
∂ψ
=
→
(l → 0)
l
l
∂x
(6.106)
とすることができる.また,j についての和を積分に置き換えると
∫
∑
1 L
→
dx
l 0
j
ただし,L は全系の長さである.よって Lagrangian は
)2
(
)2 ]
∫ L [ (
1
∂ψ
∂ψ
L=
σ
−e
dx
∂t
∂x
0 2
(6.107)
となる.
ψ に対する運動方程式を導こう.これには,作用
∫
t2
S=
Ldt
(6.108)
t1
の停留条件(Hamilton の変分原理,または最小作用の原理)より導かれる.ψ → ψ + δψ としたときの S の
変分は
∫
∫
t2
δS =
L
dt
t1
0
)
(
)
]
[ (
∂ψ ∂δψ
∂ψ ∂δψ
−e
dx σ
∂t
∂t
∂x
∂x
第一項を t で,第二項を x で部分積分すると
] t2 ∫ t2 [
]L
∫ L [
∂ψ
∂ψ
δS =
dx σ
δψ
−
dt e
δψ
∂t
∂x
0
t1
t1
0
( 2 )]
∫ t2 ∫ L [ ( 2 )
∂ ψ
∂ ψ
−
dt
−e
δψ
dx σ
∂t2
∂x2
t1
0
(6.109)
(6.110)
通常の変分原理のときと同様に,時間方向の境界条件として
δψ(t1 ) = δψ(t2 ) = 0
(6.111)
を仮定する.空間方向については固定端境界条件
ψ(0, t) = ψ(L, t) = 0
または周期的境界条件
ψ(x, t) = ψ(x + L, t)
を仮定することにしよう(後者は一次元格子をリング状にしたと考えればよい).すると,(6.110) 式の第一
項目,第二項目はゼロとなり,結局
∫
δS = −
∫
t2
L
dt
t1
0
( 2 )]
[ ( 2 )
∂ ψ
∂ ψ
−
e
δψ
dx σ
∂t2
∂x2
113
(6.112)
を得る.これが任意の δψ に対して成り立つための条件は波動方程式
2
√
∂2ψ
2∂ ψ
=
c
, cs = e/σ(音速)
s
2
2
∂t
∂x
(6.113)
で与えられる.
音速 cs を用いて Lagrangian を書き直すと
)2
(
)2 ]
∫ L [ (
1
∂ψ
∂ψ
L=
σ
− σc2s
dx
∂t
∂x
0 2
√
となる.ここで,ψ(x, t) = (1/ σ)φ(x, t) とおけば
( )2 ]
∫ L [( )2
∂φ
∂φ
1
2
− cs
dx
L=
∂t
∂x
0 2
(6.114)
(6.115)
φ に対する波動方程式は
∂2φ
∂2φ
= c2s 2
(6.116)
2
∂t
∂x
となる.(6.79) に直接連続体近似 ψi−1 − 2ψi + ψi+1 → ∂ 2 ψ/∂x2 を施しても同じ波動方程式を導くことが
できる.
114
© Copyright 2026 Paperzz


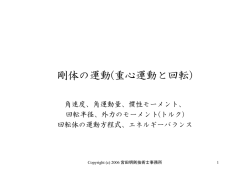
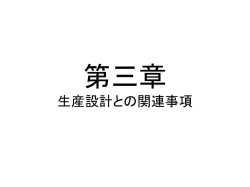
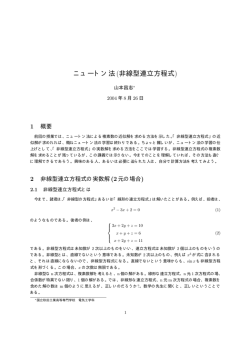

![大学編入学試験問題(数学) [選択項目] 文中:接線 0.1 ベクトルの面積分](http://s3.paperzz.com/store/data/005346903_1-6242cf7c70623fdc95001e19031ee121-250x500.png)