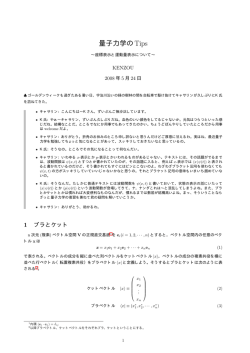
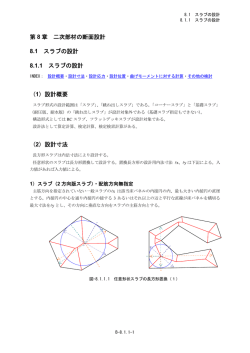
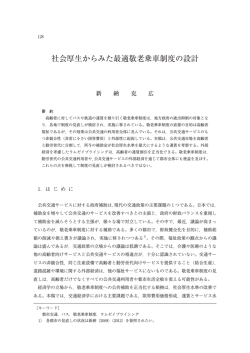
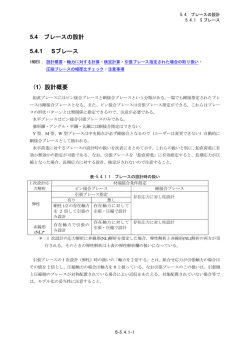
あもんノート http://amonphys.web.fc2.com/ ユークリッド幾何学、ニュートン力学から、相対論、宇宙論、量子力学、場の量子論、 素粒子論、そしてくりこみ理論まで、理論物理学を簡潔にかつ幅広く網羅したノート です。TOP へは上の URL をクリックして行けます。 目次 1 2 特殊相対論 1.1 相対論の歴史的背景 . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.2 自然単位系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.3 時空とローレンツ座標 . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.4 ローレンツ変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.5 ガレージのパラドックス . . . . . . . . . . . . . . . . . . . . . . . . 8 1.6 速度の変換と光行差 . . . . . . . . . . . . . . . . . . . . . . . . . . 9 1.7 特殊相対論の作用 . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 1.8 粒子の運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 1.9 マックスウェル方程式 . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.10 エネルギー運動量テンソル . . . . . . . . . . . . . . . . . . . . . . 14 1.11 4 元運動量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.12 複合粒子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.13 一般座標の性質 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.14 回転系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 1.15 一方向に加速する系 . . . . . . . . . . . . . . . . . . . . . . . . . . 19 1.16 リンドラー座標における粒子の運動 . . . . . . . . . . . . . . . . . 21 1 1 特殊相対論 量子論以前の物理学は古典物理学と呼ばれます。古典物理学は相対論によって 完成された体系をなし、特に重力を無視したときの相対論は実験的にも完全に確 立したものであり、特殊相対論と呼ばれます。ここでは特殊相対論の基礎事項を まとめておきます。リーマン幾何学を既知とします。 1.1 相対論の歴史的背景 1864 年、マックスウェルは電気と磁気の統一理論を完成し、そこから波動解を 導きました。これを電磁波といいます。理論から導かれる電磁波の伝播速度は、光 の速さ、 c ∼ 2.9979 × 108 m/s に等しく、光の正体は電磁波であることが判明します。しかしニュートン理論に よれば、一般に物体の速さは観測者の運動状態によって異なります。そうすると 必然的に、 光の速さは、一体、何に対しての速さなのか? という疑問を生じます。当時多くの学者は、電磁現象はエーテルと呼ばれる媒質 の現われであり、宇宙はこのエーテルで満たされていて、光の速さはエーテルに 対するものであろうと考えていました。 1905 年、アインシュタインは、エーテルなど仮定しなくても次の 2 つの事柄を 同時に満たす理論を作ることができることを示し、エーテルの概念は余分である としました。 • 物理法則はどの基準系においても同じ形で表される (相対性原理) • 光の速さは光源の運動状態に依らず一定である (光速一定の原理) これら 2 つの原理から光の速さはどの基準系においても同じということになり、こ れを光速の不変性といいます。光速の不変性は、ニュートン理論、特にガリレイ 変換と矛盾するわけですが、アインシュタインはニュートン理論における時間概 念を間違いだとしました。上の 2 つの原理に忠実に従えば、時間は宇宙全体で一 様に進むものではなく、基準系によって進み方が異なるというわけです。また、離 れた地点における 2 つの出来事 (事象) が同時刻かそうでないかは、基準系に依存 することになります。 2 こうして構築された理論は、すでにローレンツやポアンカレにより提示されて いた式に合理的な説明を与え、相対論 (相対性理論) と命名されます。また、ミン コフスキーにより 4 次元時空に基づくわかりやすい形に整理されました。後にア インシュタインは相対論的な重力理論を提唱し、これを一般相対論と呼びます。対 して重力を含まないそれまでの相対論は、特殊相対論と呼ばれることになったわ けです。 (余談) 特殊相対論に関するアインシュタインの最初の論文は、 「運動する物体の電気力学につい て」(1905) ですが、この論文は論述がわかりにくいことで有名です。これは当時、アインシュタイ ンがマッハの哲学に傾倒し、形式主義の視点からかけ離れていたためとも考えられます。この論文 の発表後、アインシュタインは多くの質問の手紙を受け、それら質問に丁寧に回答してゆきます。 そうしたやり取りの中で、アインシュタインの新しい概念が他の科学者に受け入れられていった と考えられます。ミチオカクは、映画「E = mc2 ∼ アインシュタインの世界一美しい方程式」の 中で、アインシュタインの発想の転換について次のように述べています : それまで時間とは神の手に握られた腕時計のようなもので、宇宙のどこにいようと常 に一定していると考えられていました。しかしアインシュタインは、 「違う、神の腕時 計のチクタクいう音の正体は、電気が磁気を生み、磁気が電気を生む音なのだ。すな わち唯一一定なのは光である」と気が付いたのです。 これはアプリオリな概念と考えられていた時間を、光の運動に立脚して逆に構成することができ るという、光時計のアイディアをみごとに言い表しています。 1.2 自然単位系 以下、真空中の光の速さ c, および真空の透磁率 µ0 を 1 とする自然単位系を採 用します。 このような自然単位系にとまどう人がいるかもしれませんが、だとしたらそれ は、長さと時間が異なる単位を持たなければいけないという勝手な思い込みによ るものか、もしくは SI 単位系 (MKSA 単位系) に慣れすぎているためと考えられ ます。SI は米国を除きよく普及している国際単位系で、日常的には便利ですが、 相対論や量子論等の現代物理学を記述する際には、様々な普遍定数が式のあちこ ちに現れ便利とはいえません。 例えば、基本単位を eV (エレクトロンボルト) だけとし、 m(メートル) = 5.0677×106 eV−1 , s(秒) = 1.5193×1015 eV−1 , kg(キログラム) = 5.6096×1035 eV, A(アンペア) = 1.2441×103 eV, K(ケルビン) = 8.6173×10−5 eV のように換算してしまうのが自然単位系の一つで、このとき真空中の光の速さ c を含め、SI における多くの普遍定数が 1 になります (物理定数表を参照)。これは 原子核物理や素粒子論においてはすでによく用いられている、比較的よく普及し 3 た単位系です。eVn の単位を持つ物理量を、質量次元 n であるといいます。質量 やエネルギーや温度は質量次元 1 で、長さや時間は質量次元 −1 です。速さや電 荷は質量次元 0, すなわち無次元量になります。 また、普遍定数を 1 とすることは、実は SI においてもすでに行っていると考え ることができます。例えば、力の単位を仮に ri とすると、ニュートンの運動方程 式は、F = kma であり、ここで k は ri kg−1 m−1 s2 を単位とするある普遍定数で す。この場合、力学の方程式のあちこちに k が現れて鬱陶しいことになります。 そこで SI では k = 1 とおいている、と考えることができるわけです。自然単位 系はこうした操作の延長上にあります。 どこか別の惑星に住む宇宙人 (知的生命体) は、ri のような力の単位を基本単位 として採用しているかもしれないし、また一方で、c = 1 の単位系を日常的に用 いている宇宙人もいるかもしれません。もし、ri を採用するある宇宙人が、 「力の 単位が質量と長さと時間の組合せで表されるなんてあり得ない。力はこれらと独 立な物理量です。F = ma では両辺の次元が合っていません」などと文句を言っ てきたらどうでしょう? 独自の単位系を元に酷い固執をしていると思うはずです。 しかし c = 1 を受け入れられない人は、この宇宙人とまったく同様の固執をして いるわけです。 (余談) 工学や実験系の人の中には専門家でも自然単位系に拒絶反応を示したり、「自然単位系 はあくまで形式的なもの。c や µ0 や ~ を次元解析により復活させて、ようやく次元の合う正しい 式になるのだ」などと勘違いしている人が多いようなので、ここで詳しく説明しました。 1.3 時空とローレンツ座標 4 次元の計量空間を考え、その座標を xµ (µ = 0, 1, 2, 3) としましょう。計量 gµν を、ローレンツ計量 : 1 0 0 0 0 −1 0 0 ηµν = 0 0 −1 0 0 0 0 −1 µν になるように座標を選ぶことができるとき、この計量空間をミンコフスキー空間と いい、この座標をローレンツ座標といいます。物理においては、この 4 次元の計 量空間を時空と呼びます。 粒子の運動は時空上の曲線として表され、これを世界線といいます。線素の式、 dτ 2 = gµν dxµ dxν における τ は固有時間と呼ばれ、これは一般に世界線にそって時計が測る時間で 4 す。特にローレンツ座標においては、 dτ 2 = ηµν dxµ dxν = (dx0 )2 − (dx1 )2 − (dx2 )2 − (dx3 )2 となります。上式で dxi = 0 (i = 1, 2, 3) とおくと、dτ = dx0 が得られるので、x0 は系に静止した時計が測る時間を意味します。x0 は時間座標と呼ばれます。残り の x1 , x2 , x3 は空間座標と呼ばれます (図 1)。以後、i, j, k · · · などの添字は空間 成分 1, 2, 3 を走るものとします。 図 1: 時空と粒子の世界線 dxµ dx0 で粒子の (4 元)√座標速度を定義します。明らかに v 0 = 1. また、v i は粒子の速度 であり、|v| = v i v i は粒子の速さを意味します。このとき、 p p p dτ µvν = 0 )2 − v i v i = = η v (v 1 − |v|2 µν dx0 vµ = がわかります。すなわち、固有時間 τ は座標時間 x0 よりもゆっくり進むわけで、 これは運動する時計の遅れと呼ばれる性質です。時計の遅れを日常的に認識でき ないのは、日常的な速さが光の速さ 1 に比べてずっと遅いからです (|v| ¿ 1)。 上式から、ローレンツ座標において、 |v| = 1 ⇔ dτ = 0 ですが、これは光速で運動する粒子があれば、その粒子の固有時間はまったく経 過しないことを意味しています。また、dτ はスカラー量なので、あるローレンツ 座標で粒子が光速で運動していれば、別のローレンツ座標においてもやはりその 粒子は光速で運動していることになり、これは光速の不変性を意味しています。 5 (余談) 例えば地球にある双子がいて、その片方が光速に近い速さで飛ぶロケットに乗って宇宙 旅行をしたのち地球に帰ってきたとします。このとき地球の静止系においてはロケットの時計は地 球の時計に比べてゆっくり進んだと考えられるため、双子が対面したとき、地球に残っていた方 は老人、旅行してきた方は若いまま、なんてことが考えられます。これは実際に起こり得る現象 で、ウラシマ効果と呼ばれます。一方、このことをロケットの静止系で考えると、運動していたの は地球であり、そうすると地球の時計の方が遅れるということになって、おかしいと思うかもし れません (双子のパラドックス)。しかし地球の静止系が近似的にローレンツ座標系と考えられる のに対し、地球に対して光速近くで運動し加減速するロケットの静止系の方は、あからさまに非 ローレンツ座標系で、運動する時計の遅れの性質を単純には適用できないことに注意してくださ い。それゆえウラシマ効果に矛盾はないわけです。 1.4 ローレンツ変換 ローレンツ座標間の変換をローレンツ変換といいます。線形変換 : x0µ = Λµ ν xν (行列表記で x0 = Λ x) を考え、これがローレンツ計量を不変にすると仮定すれば、 dτ 2 = dx0T η dx0 = dxT η dx ∴ dxT ΛT η Λ dx = dxT η dx ∴ ΛT η Λ = η を得ます。これがローレンツ変換の条件式です。この式は群論を用いると一般的 に解けますが、特に重要な解は、 γ −γV 0 0 1 γ 0 0 −γV Λ= γ=√ , 0 1 0 0 1−V2 0 0 0 1 です。ここで −1 < V < 1. γ はローレンツ因子と呼ばれます。これが ΛT ηΛ = η を満たしていることを確認して欲しいです。 ローレンツ座標を xµ = (t, x, y, z)µ と書けば、変換式 x0 = Λ x は、 t0 = γ(t − V x), x0 = γ(−V t + x), y 0 = y, z0 = z となります。このように時間座標と空間座標が混ざる変換は、相対的に運動する 系への変換を意味し、ブーストと呼ばれます。次の点に注意しましょう : (1) x0 = 0 ⇔ x = V t (2) x0 = L ⇔ x = V t + γ −1 L (3) t0 = 0 ⇔ t = V x 6 (1) から、V は元の系からみた新しい系 (ダッシュ系) の速度であるとわかります。 √ また、(2) から、速度 V で運動する棒の長さが γ −1 = 1 − V 2 の比で収縮するこ とがわかります。この性質はローレンツ収縮と呼ばれます。 (3) は、2 つの系における同時刻の定義が異なることを意味し、この性質は同時 刻の相対性と呼ばれます。例えば図 2 で、2 つの時空点 O と A は、ダッシュ系で は同時刻の事象 (出来事) とみなされますが、元の系ではそうではないわけです。 図 2: ローレンツ変換 運動する時計の遅れから、2 つのローレンツ座標系においては互いに相手の時計 が遅れることになり、少し不思議に思われるかもしれません。しかし図 2 の 2 系 において時計の進みを比較すると、元の系においては、例えば C と D を比較し、 OC > OD なので相手の時計の方が遅れると認識します。ミンコフスキー空間な ので斜めになっている線分の方が短くなることに注意。一方、ダッシュ系におい ては D と同時刻なのは C ではなく E であり、D と E を比較し、OD > OE が 確かめられるので、やはり相手の時計の方が遅れると認識するわけです。これら 2 つの意見に矛盾はありません。 ローレンツ変換の逆変換式は、 t = γ(t0 + V x0 ), x = γ(V t0 + x0 ), y = y0, z = z0 となり、元のローレンツ変換式と比較して V の符号が逆なだけです。このことは、 2 つのローレンツ系が互いに対等な関係になっていることを示しています。 7 ちなみに、双曲線関数、 ex + e−x cosh x = 2, ex − e−x sinh x = 2, tanh x = sinh x cosh x を用いると、cosh2 x − sinh2 x = 1 に注意して、x 方向のブーストは、 cosh θ − sinh θ 0 0 − sinh θ cosh θ 0 0 Λ= 0 1 0 0 0 0 0 1 と媒介変数表示することもできます。ここで −∞ < θ < ∞ です。このときダッ シュ系の速度は V = tanh θ と表されます。回転とのアナロジーで、このような 表示が便利になることがあります。 1.5 ガレージのパラドックス 運動する時計の遅れ、ローレンツ収縮、同時刻の相対性という 3 つの性質は、日 常的な時間概念に訂正をせまるため、その理解には特に慎重を要します。ここで は新しい時間概念に慣れるため、ガレージのパラドックスと呼ばれる問題を紹介 します。 図 3: ガレージのパラドックス 図 3 のように、長さ Lc の車と、長さ Lg のガレージがあり、ガレージ (および 地上) に対して車が速さ V で走っているとします。ガレージの静止系においては √ 車はローレンツ収縮によって縮んでおり、その長さは 1 − V 2 Lc となります。い ま、車がガレージの中に突入し、ガレージの中に納まった瞬間、ガレージの前後 の扉 A, B を同時に瞬時に閉じ、すぐに開きます (∗) 。そうして車が扉にぶつかる 8 ことなく通過したとします。これが可能なのは Lg ≥ 衝突をぎりぎり回避したとして、 p Lg = 1 − V 2 Lc √ 1 − V 2 Lc のときですが、 であったとします。すなわち、もし車とガレージをともに静止させれば、車の方 √ が 1/ 1 − V 2 倍だけ長いと仮定します。 この事柄を車の静止系で考えると、ローレンツ収縮しているのはガレージの方 √ であり、その長さは 1 − V 2 Lg となります。この系では明らかに車の方がガレー ジより長く、車がガレージに収まる瞬間などあり得ません。車と扉はどうして衝 突しないのでしょう? というパラドックスです。 答えは簡単で、ガレージの静止系において 2 つの扉 A, B を同時に閉じたという ことは、同時刻の相対性から、車の静止系においては A, B を閉じたのは同時で はないということです。B が先に閉じてすぐさま開き、その後少し経って A が閉 じてすぐさま開いたというわけです。これなら車は扉にぶつかることなく通過す ることが可能です。実際、その時間差は、車の静止系において、 ∆t0 = γ(∆t + V ∆x) = √ V Lg 1−V2 であることがローレンツ変換式からわかり、車と 2 つの扉がぎりぎり接触しない 条件は、 p 1 − V 2 Lg + V ∆t0 = Lc √ と書けます。∆t0 を消去すれば Lg = 1 − V 2 Lc を得ますが、これはガレージの 静止系における仮定と一致しています。 (*注) 扉を瞬時に閉じて開くということをイメージしにくければ、扉の代わりにタイヤストッ パーなり赤外線センサーなどを想定してもよいでしょう。 1.6 速度の変換と光行差 x 方向への速度 V のブースト変換は、 t0 = γ(t − V x), x0 = γ(−V t + x), √ で、ここで γ = 1/ 1 − V 2 でした。ここから、 y 0 = y, γ(−V dt + dx) (dx/dt) − V dx0 = = dt0 γ(dt − V dx) 1 − V (dx/dt), √ dy 0 dy 1 − V 2 (dy/dt) = = dt0 γ(dt − V dx) 1 − V (dx/dt) 9 z0 = z を得るので、このブースト変換における粒子の速度 (vx , vy , vz ) の変換式は、 √ √ 2v 1 − V 1 − V 2 vz v − V x y 0 0 0 vx = vy = vz = 1 − V vx , 1 − V vx , 1 − V vx です。 いま、あるローレンツ系において、x 軸と角 θ を成す方向からやってくる光を考 え、その光の速度を特に (vx , vy , vz ) = (− cos θ, − sin θ, 0) としましょう。一方、こ のローレンツ系に対し、x 方向に速度 V で運動する別のローレンツ系において、 同じ光の速度が (vx0 , vy0 , vz0 ) = (− cos θ0 , − sin θ0 , 0) であったとします。このとき速 度の変換式から、 √ cos θ + V 1 − V 2 sin θ 0 0 cos θ = sin θ = 1 + V cos θ, 1 + V cos θ sin θ θ = に注意すれば、 2 1 + cos θ r θ0 1−V θ tan = tan 2 1+V 2 ですが、tan の半角公式 : tan を得ます。この式は観測者の運動状態の違いにより光のやってくる方向が変わっ て見えることを意味していますが、この現象を光行差といいます。 (余談) あるロケットが地球のすぐ近くを太陽の方向に向かって光の速さに匹敵する速さで通過 した場合、ロケットに乗っている人がその瞬間に見る太陽は、地球にいる人が見る太陽よりも小さ く見えます。このことは地球の静止系で考えれば光行差で説明されます。一方、ロケットの静止系 で考えた場合は、光の到達に時間がかかることを考慮したみかけの位置により説明されます。ロ ケットの静止系においては、地球と太陽がともに運動していて、地球と太陽の間の距離はローレン ツ収縮により短くなります。また、地球がロケットのところまでやって来た瞬間にロケットに乗っ ている人が見る太陽の光は、太陽がその瞬間にある位置よりももっと遠くにあったときに発せら れたものです。結果、小さく見えると考えられるわけです。もちろんこのことは定量的にも確かめ られます。光行差とみかけの位置の概念が、系の違いによる裏腹の関係になっていることに注意し てください。 1.7 特殊相対論の作用 粒子には、質量と電荷と呼ばれる、固有の物理量が付随しているものとします。 n 番目の粒子の質量を mn , 電荷を qn と書きます。また、n 番目の粒子の世界線 を xµ = xµn (λn ), 固有時間を τn と表します。λn は世界線上の適当なパラメーター です。 座標に依らない世界線上の積分和、 Sm = − X n 10 Z mn dτn は粒子の作用と呼ばれます。 一方、時空上に共変ベクトル場 Aµ (x) があるものとし、これを 4 元ポテンシャ ルと呼びます。 Fµν = ∂µ Aν − ∂ν Aµ を定義すると、 ∇µ Aν − ∇ν Aµ = ∂µ Aν − Γλ νµ Aλ − ∂ν Aµ + Γλ µν Aλ = ∂µ Aν − ∂ν Aµ = Fµν なので、Fµν は反対称テンソルで、これは電磁場、あるいは電磁テンソルと呼ば れます。 座標に依らない時空積分、 Sem 1 =− 4 Z d4 x √ Fµν F µν √ √ は電磁場の作用と呼ばれます。ここで = − det g で、g は計量の行列です。ま た、4 元ポテンシャルの世界線上における線積分和、 X Z Sq = − qn dxµn Aµ (xn ) n は電磁相互作用の作用と呼ばれ、これも座標に依存しません。 以上、3 つの作用の和、 S = Sm + Sq + Sem Z Z X Z X 1 √ =− mn dτn − qn dxµn A(xn ) − d4 x Fµν F µν 4 n n が特殊相対論の作用であり、粒子の世界線 xµn (λn ), および 4 元ポテンシャル Aµ (x) の仮想変分に対して、停留値性 : δS = 0 を持つものと仮定されます。このような仮定は一般に作用原理と呼ばれます。こ の主張は座標に依存していないため、そこから得られる物理法則は座標に依存し ません。この性質を共変性、あるいは一般相対性原理といいます。 (余談) 初等的な特殊相対論の教科書においては、ローレンツ座標だけを扱い、一般座標を一切 考えないことが多いです。ここでは特殊相対論の枠内において一般座標も扱います。このため難易 度は少し高くなりますが、論理的に自然で、また、一般相対論への拡張も容易になります。以下、 少し難しくなりますが、現代物理学を理解するための登竜門です。頑張ってフォローして欲しい です。 11 1.8 粒子の運動方程式 粒子の作用 Sm を丁寧に書けば、 Sm = − X s Z mn dλn n dxµn dxνn gµν (xn ) dλn dλn xλn に関する変分を計算すれば、結果、 µ ¶ δSm dτn duµn µ ν = mn gλµ + Γλµν un un δxλn dλn dτn となります。導出は測地線の方程式の導出と同じなので、リーマン幾何学の章を 参照してください。ここで、 dxµ uµn = n dτn dxµ は粒子の固有速度と呼ばれます。固有速度 uµn は座標速度 vnµ = n0 と異なり、反 dxn 変ベクトルです。 一方、電磁相互作用の作用 Sq に関して、 Ã ! X Z dxµn qn dλn δSq = δ − Aµ (xn ) dλ n n ¶ µ X Z dδxµn dxµn =− qn dλn Aµ (xn ) + δAµ (xn ) dλ dλ n n n µ ¶ ν µ X Z dx dx =− qn dλn −δxµn n ∂ν Aµ (xn ) + n δxνn ∂ν Aµ (xn ) dλn dλn n Z X dxµn ν δSq dxµn =− qn dλn Fνµ (xn ) δxn ∴ = −qn Fλµ λ dλ δx dλn n n n を得るので、作用原理 δS/δxλn = 0 より、粒子の運動方程式として、 µ λ ¶ dun + Γλ µν uµn uνn = qn F λ µ uµn mn dτn を得ます。Γλ µν を含む項は座標が直線座標でないことから生じる仮想的な力で、 例えば加速系における慣性力はこれに該当します。ローレンツ座標を選べばこれ は消えます。一方、F λ µ を含む項は電磁場から来る力で、ローレンツ力と呼ばれ ます。 (余談) 汎関数に不慣れな人へ。複数の独立変数 xt (t = 1, 2, · · · ) があったとき、その多変数関 数 f (x1 , x2 , · · · ) を f (x) などと書くことはおなじみでしょう。このとき ∂f (x)/∂xt という偏微分 12 を考えることができます。ではもし xt の添字 t が自然数でなく実数だったらどうでしょう? 通常 それは x(t) と書かれ、t の関数とみなされますが、実数 t で特徴づけられる連続無限個の独立変 数 x(t) と考えてもいいでしょう。その多変数関数を f [x] などと書いて x(t) の汎関数といいます。 また、偏微分 ∂f (x)/∂xt に相当するものを δf [x]/δx(t) と書いて汎関数微分といいます。 ∂xt = δts ∂xs δx(t) = δ(t−s). δx(s) R P クロネッカーデルタの連続版がデルタ関数であるわけです。同時に t → dt というように和を 積分として考えます。例えば、 Z X ∂f (x) δf [x] df (x) = dxt に対応して δf [x] = dt δx(t) ∂xt δx(t) t に対応して ということになります。これで不慣れ卒業でしょう。 1.9 マックスウェル方程式 次に 4 元ポテンシャル Aµ (x) に関する変分ですが、 Z Z 1 1 √ 4 √ µν δSem = − d x F δFµν = − d4 x F µν (∂µ δAν − ∂ν δAµ ) 2 Z 2 Z δSem √ √ √ = ∂µ ( F µν ). = − d4 x F µν ∂µ δAν = d4 x ∂µ ( F µν )δAν ∴ δAν 一方、 X δSq =− qn δAν (x) n Z X δAµ (xn ) dxµn =− qn δAν (x) n Z dxνn δ 4 (x−xn ) ですから、作用原理 δS/δAν = 0 より、電磁場の運動方程式は、 √ √ ∂µ ( F µν ) = j ν となり、マックスウェル方程式と呼ばれます。ここで、 Z √ µ X j = qn dxµn δ 4 (x−xn ) n √ は 4 元電流密度と呼ばれる量です。 を付けて定義したのは、そうすることで j µ を反変ベクトル場とみなせるからです。また、 δ 4 (x) = δ(x0 )δ(x1 )δ(x2 )δ(x3 ) は 4 元デルタ関数です。 電磁場の反対称性 Fµν = −Fνµ に注意すれば、マックスウェル方程式から、 √ ∂µ ( j µ ) = 0 13 がわかります。すなわち、4 元電流密度は保存カレントです。実際、ガウスの定理 に注意して、 Z Z Z √ √ √ d3 x ∂0 ( j 0 ) = − d3 x ∂i ( j i ) = − d2 xi j i V V ∂V √ ですが、もし空間領域 V の境界面 ∂V で j i = 0 なら上式は 0 となり、 Z ¯ X Z ¯ 3 √ 0 3 3 Q= dx j = qn d x δ (x−xn )¯ V V n x0n =x0 R が時間座標に依らないことになります。 V d3 x δ 3 (x−xn )|x0n =x0 は n 番目の粒子が 時刻 x0 に V 内にあるときは 1 を与え、無いときは 0 を与えることに注意する と、Q は時刻 x0 において V 内にある電荷の総和を意味しています。すなわちこ れは電荷保存則であり、この場合は自明な内容になっています。 ちなみに、計量に関する微分公式 (リーマン幾何学の章を参照) に注意すれば、 マックスウェルの方程式と電荷保存則は共変微分 ∇µ を用いて、それぞれ、 ∇µ F µν = j ν , ∇µ j µ = 0 と書くこともできます。こうすると座標に依らない方程式であること、すなわち 共変性が明らかになります。 1.10 エネルギー運動量テンソル 次に、無限小の一般座標変換、 x0µ = xµ − ²µ (x) 0 を考えてみましょう。この変換に対する計量の変分 (∗) δgµν (x) = gµν (x) − gµν (x) ρ σ ∂x ∂x 0 は、計量のテンソル性、gµν (x0 ) = 0µ 0ν gρσ (x) を用いて、 ∂x ∂x δgµν = gµλ ∂ν ²λ + gνλ ∂µ ²λ + ²λ ∂λ gµν と計算されます。汎関数微分で書けば、 δgµν (y) = gµλ (y)∂ν δ 4 (x−y) + gνλ (y)∂µ δ 4 (x−y) + δ 4 (x−y)∂λ gµν (y). λ δ² (x) 一方、この無限小座標変換に対する作用の変分は、作用原理から δS/δxµn = 0, δS/δAµ = 0 であることに注意すると、計量の場だけで展開され、 Z δS δgµν (y) δS 4 = d y δ²λ (x) δgµν (y) δ²λ (x) 14 と書けますが、 δS 1 √ µν =− T δgµν 2 で T µν を定義すれば、これは添字 µ, ν について対称と仮定できます。 以上の式から、 δS 1√ √ µ √ µν = ∂ ( T ) − ∂ g T = ∇µ Tλµ µ λ µν λ λ δ² 2 を得ますが、作用は座標に依らないのでこれは 0 のはずです。すなわち、 ∇µ T µν = 0. 特にローレンツ座標においては、∂µ T µν = 0 となり、T µν は保存カレントである とわかります。 作用の計量に関する変分を計算すれば、それぞれ、 Z 1X δSm =− mn dxµn uνn δ 4 (x−xn ), δgµν 2 n δSem 1√ =− δgµν 2 µ F µλ Fλ ν δSq = 0, δgµν 1 + g µν Fρσ F ρσ 4 ¶ となるため、T µν の具体的な形は、 Z 1 ν √ −1 X µν T = mn dxµn uνn δ 4 (x−xn ) + F µλ Fλ + g µν Fρσ F ρσ 4 n となります。これをエネルギー運動量テンソルといいます。 (*注) 場 φ(x) の同座標値における変分 δφ(x) = φ0 (x) − φ(x) は数学においてはリー微分と呼ば れます。同じ点における変分 φ0 (x0 ) − φ(x) と区別して、リー微分を δL φ(x) のように書くこともあ ります。汎関数における微分 (変分) はリー微分によるものであることに注意してください。 1.11 4 元運動量 ローレンツ座標においては T µν は保存カレントでした。よってある空間的領域 V の境界面で T iν = 0 ならば、 ¶ µ Z Z X 1 ν Pν = d3 x T 0ν = mn uνn |x0n =x0 + d3 x F 0λ Fλ + g 0ν Fρσ F ρσ 4 V V n は時間座標に依りません。すなわち保存量です。P µ を領域 V の 4 元運動量とい います。その時間成分 P 0 はエネルギー、空間成分 P i は運動量と呼ばれます。 15 各々の粒子の寄与が、 Pnµ = mn uµn = mn vnµ mn vnµ dx0 =p dτn 1 − |vn |2 であることに注意して下さい。粒子の速さ |vn | が光速 1 に近づけば、その 4 元運 動量は限りなく大きくなります。4 元運動量は保存量ですから、正常な初期条件か ら出発した場合、粒子は決して光速には到達できないと考えられます。 また、|vn | ¿ 1 という非相対論的極限においては、粒子のエネルギーと運動量 は、それぞれ vn の最低次で、 1 mn |vn |2 , Pni ∼ mn vni 2 と近似されることに注意してください。運動量 Pni はニュートン理論の運動量に 近似され、エネルギー Pn0 は、“質量 + ニュートン理論の運動エネルギー” に近似 されるわけです。 Pn0 ∼ mn + 4 元運動量 P µ はローレンツ変換において反変ベクトルとして振舞います。この ことを証明しておきましょう。 [証明] 無限小のローレンツ変換を、 x0µ = xµ + ²µ ν xν と書きます。ここで ²µ ν は無限小の変換パラメータです。これがローレンツ計量 を不変とすることから、ηµλ ²λ ν + ηνλ ²λ µ = 0 が得られます。すなわち、 ²0 0 = 0, ²i j = −²j i . ²0 i = ²i 0 , 一方、T µν がテンソルであることに注意すると、無限小ローレンツ変換に対する 変分 (リー微分) は、δT µν = ²µ λ T λν + ²ν λ T µλ − ²ρ σ xσ ∂ρ T µν と書けます。µ = 0 と おけば、 δT 0ν = ²0 λ T λν + ²ν λ T 0λ − ²ρ σ xσ ∂ρ T 0ν . この式の最後の項は、∂µ T µν = 0 に注意し、 −²ρ σ xσ ∂ρ T 0ν = −²0 σ xσ ∂0 T 0ν − ²i σ xσ ∂i T 0ν = ²0 σ xσ ∂i T iν − ²i σ xσ ∂i T 0ν = ∂i (· · · ) − ²0 i T iν + ²i i T 0ν = ∂i (· · · ) − ²0 i T iν となるので、空間の全微分項 ∂i (· · · ) を除き初項と相殺します : δT 0ν = ²ν λ T 0λ + ∂i (· · · ). よって、 Z Z δP ν = d3 x δT 0ν = ²ν λ V d3 x T 0λ = ²ν λ P λ V ν がわかり、これは P が反変ベクトルであることを示しています。[証明終] 16 1.12 複合粒子 一般に複数の粒子と電磁場が空間の局所にあるとき、系のエネルギーと運動量 がそれぞれ P 0 = m, P i = 0 となるローレンツ座標が存在するでしょう。この座 標を系の重心系といい、このときの m を系の有効質量といいます。一方、4 元運 動量 P µ はローレンツ変換に対して反変ベクトルとして振舞うため、重心系から ブーストした他のローレンツ座標における 4 元運動量は、 ∂x0µ ν ∂x0µ P = P = m. ∂xν ∂x0 ここで ∂x0µ /∂x0 は系の重心の固有速度とみなせるので、これを uµ と書けば、 0µ P 0µ = muµ となります。この式は 1 粒子の 4 元運動量と同形であるため、複数の粒子と電磁場 からなる複雑な系も、巨視的には 1 粒子とみなすことができ、このような粒子は 複合粒子と呼ばれます。 しかし複合粒子が多数あったとき、全体のエネルギーが保存する一方で、それ ら有効質量の総和は保存しません。このことは例えば複合粒子同士の非弾性衝突 を考えればわかるでしょう。また、ある 1 個の粒子があったとき、それが複合粒子 で ‘ないこと’ を知る術もありません。これが質量の非保存性の意味であり、有名 な式 E = mc2 (P 0 = m) の実効的な意味でもあります。 (余談) よく教科書に見かける E = mc2 の説明は、単に 1 粒子の静止時のエネルギーが mn c2 であることです。しかしこれはもちろん核反応などで生じる質量欠損の説明にはなっていません。 多くの教科書においてこの種のごまかしが横行しているのは、4 元運動量のローレンツベクトル性 の一般的証明が、特殊相対論の他の事項と比べてやや敷居が高いからと考えられます。 1.13 一般座標の性質 ここで一般的な座標の性質について少し考えてみましょう。 空間の各場所に無数の時計があると想定します。これらの時計は正確に時を刻 む必要はありませんが、稠密に配列されていて、また、それぞれの時計には空間 座標を意味する指標が付いているものとします。ある 1 つの事象 (時空点) に対し、 そこにある時計の指標をその事象の空間座標 xi (i = 1, 2, 3) とし、その時計が示 す時刻を、その事象の時間座標 x0 だと考えます。 このような想定により、時空に座標 xµ (µ = 0, 1, 2, 3) が張られると考えること ができ、計量 gµν (x) が決定します。計量 gµν (x) が時間座標 x0 に依存しないと き、その座標は定常的であるといいます。 いま、定常的な座標において、空間座標がそれぞれ xi , xi + dxi である接近した 2 つの世界線 L1 , L2 を考えます。そして、L2 において時刻 t1 に光を発し、それ 17 を L1 において時刻 t2 に受け取り、即座に光を送り返し、それを L2 において時 刻 t3 に受け取るという光通信過程を考えます。光の世界線においては、 g00 (dx0 )2 + 2g0i dxi dx0 + gij dxi dxj = 0 であり、これを dx0 について解くと、その 2 解は、 p i −g dx ± (g0i g0j − g00 gij )dxi dxj 0i dx0± = g00 . また、このとき上の光通信過程において、 t1 = t2 + dx0− , t3 = t2 + dx0+ となります。もし t2 = (t1 + t3 )/2 なら、L1 , L2 における 2 つの時計は同期されて いることになります。また、δt = (t1 + t3 )/2 − t2 という量を定義すれば、これは 2 つの時計のずれを意味します。t1 , t3 の式を代入し dx0± の式を用いれば、 g0i dxi . δt = − g00 空間の各場所で隣接した時計が同期されているような座標は、静的であると呼ば れます。座標が静的であるための必要十分条件は g0i = 0 ということになります。 もし δt の式が完全微分形式で、−g0i /g00 = ∂i φ を満たす場 φ が存在すれば、時 間座標の変換 x00 = x0 − φ により静的な座標を得ることができます。しかしそう でない場合、すなわち g0i /g00 の回転が 0 でない場合、これは不可能となります。 この場合、各時計をどのように調整しても大域的にこれらを同期させることはで きないのです (!) 時空の座標が定常的ならば、静的であろうとなかろうと、接近した 2 点間の空間 的距離を考えることができます。上の光通信過程において、L2 における時計 (座 √ 標時間) の進み方が、本当の時計 (固有時間) の進み方の 1/ g00 倍であることに注 √ 意すれば、L1 , L2 間の空間的距離は、dl = g00 (t3 − t1 )/2 であると考えられます。 t1 , t3 の式を代入し dx0± の式を用いれば、 g0i g0j dl2 = γij dxi dxj , γij = − gij . g00 γij を空間計量と呼びます。特に静的な座標においては g0i = 0 なので、γij = −gij となります。 1.14 回転系 ローレンツ座標を (t, x, y, z) とし、x = r cos θ, y = r sin θ で r, θ を定義しま す。このとき時空の線素の式は、 dτ 2 = dt2 − dx2 − dy 2 − dz 2 = dt2 − dr2 − r2 dθ2 − dz 2 18 となり、(t, r, θ, z) は円柱座標と呼ばれます。さらに z 軸を軸として角速度 ω で 回転する回転系を考え、θ0 = θ − ωt とおきます。上式は、 dτ 2 = (1 − ω 2 r2 )dt2 − dr2 − r2 dθ02 − dz 2 − 2ωr2 dtdθ0 となります。計量の成分を読み取れば、この回転系座標 (t, r, θ0 , z) は定常的です が静的でないことがわかるでしょう。しかも時計のずれは、 ωr2 dθ0 δt = 1 − ω2r2 となり、これは完全微分形式ではありません。実際、r = 0 を囲む閉経路におい て積分すればそれは 0 になりません。この事実は、回転系においては大域的に時 計を同期できないことを意味しています。 回転系の空間計量は、 γ11 = 1, γ22 r2 = 1 − ω 2r2, γ33 = 1 (他の成分は 0) と計算されます。曲率テンソルを計算すればわかりますが、この 3 次元空間は曲 がっています。ニュートン理論では、回転系は運動学的にしか判別できなかった のですが、特殊相対論においては計量構造からしてローレンツ座標とは異なると いうことに注意して下さい。 (余談) 例えばグリニッジ天文台の時計と正確に同期された時計があるとおっしゃるなら、我々 はこう問うことができます。 「それは西回りでですか? それとも東回りでですか?」これは冗談で はありません。地上の静止系は回転系なのです。ただし実際には重力によるローレンツ系のひき ずり効果で、この性質は少し弱まります。 1.15 一方向に加速する系 ローレンツ系 (t, x, y, z) において、ある粒子が、 t = f (τ ), x = g(τ ), y = 0, z=0 と、x 方向に運動しているとします。ここで τ は粒子の固有時間です。よって、 dτ 2 = dt2 − dx2 = f 0 (τ )2 dτ 2 − g 0 (τ )2 dτ 2 ∴ f 0 (τ )2 − g 0 (τ )2 = 1 ですから、 f 0 (τ ) = cosh θ(τ ), g 0 (τ ) = sinh θ(τ ) と媒介変数表示することができます。このとき、粒子の各瞬間における座標速度 が、dx/dt = g 0 (τ )/f 0 (τ ) = tanh θ(τ ) と書けることに注意。 19 粒子の静止系 (x 方向の加速系) として、(t0 , x0 , y, z) を、 t = f (t0 ) + x0 sinh θ(t0 ), x = g(t0 ) + x0 cosh θ(t0 ) で定義すると、線素の式として、 ¡ ¢2 dτ 2 = dt2 − dx2 − dy 2 − dz 2 = 1 + θ0 (t0 )x0 dt02 − dx02 − dy 2 − dz 2 が示せるでしょう。元のローレンツ系でみると、x0 一定の曲線に、t0 一定の直線 が、ミンコフスキーの意味で常に直交する格好になっていて、それゆえ計量が対 角的になっているわけです (図 4 参照)。しかし一般に定常的ではありません。 図 4: 一方向に加速する系 計量が定常的になる必要十分条件は、上式から、θ0 (t0 ) =一定、すなわち、 θ(τ ) = aτ + b (a, b は定数) ですが、このとき、 dt = f 0 (τ ) = cosh(aτ + b), dτ dx = g 0 (τ ) = sinh(aτ + b) dτ であり、これは、 d dx dτ d2 x = =a dt dτ dt dτ 2 という意味で、等加速度運動を意味します (∗) 。また、線素の式は、 dτ 2 = (1 + ax0 )2 dt02 − dx02 − dy 2 − dz 2 20 となり、このときの座標 (t0 , x0 , y, z) はリンドラー座標と呼ばれます。 リンドラー座標にせよ、一般に一方向の加速系にせよ、遠方のどこかで g00 = 0 となり、座標が破綻してしまうことに注意してください。これは計量の非対角成 分を嫌ったためです。しかし実際の計算においては、非対角成分があっても、大 域的に破綻しない座標の方が便利であり、対角計量に固執する意味はありません。 ここでは一般に、一方向に加速する基準系において定常かつ静的な座標が張れ るのは、等加速度運動の場合に限られるという事実がわかったわけです。 d dx で定義される加速度は x 方向のブーストに関して不変です。以下はその証明です。 dt dτ µ ¶ d dx d dx0 dt d γ(dx − V dt) 1 d dt . = = −V dt0 dτ γ(dt − V dx) dt dτ 1 − V dx/dt dt dτ dt dτ √ V は 2 系間の相対速度、また γ = 1/ 1 − V 2 です。一方、dt2 = dτ 2 + dx2 に注意して、 (*注) s d d dt = dt dτ dt µ 1+ dx dτ ¶2 dx d dx 2 dx d dx = q dτ dt dτ = dt dt dτ 2 1 + (dx/dτ )2 d dx0 d dx d dx = を得ます。この性質ゆえ、 = 一定 は相対論的な等加 0 dt dτ dt dτ dt dτ 速度運動とみなされるわけです。 なので、これらから、 1.16 リンドラー座標における粒子の運動 リンドラー座標 (t, x, y, z) における線素の式は、 dτ 2 = h(x)dt2 − dx2 − dy 2 − dz 2 , h(x) = (1 + ax)2 でした。この時空における粒子の運動を考えてみましょう。 粒子の運動方程式は、 duλ + Γλ µν uµ uν = 0 dτ ですが、今の計量においては、接続係数 Γλ µν は添字に 2 か 3 があると 0 になる ので、 du3 du2 = = 0 ∴ u2 = A, u3 = A0 . dτ dτ 0 ここで A, A は運動の定数です。また、運動方程式の λ = 0 成分は、 du0 + 2Γ0 01 u0 u1 = 0 dτ 21 を与えますが、Γ0 01 = g 00 Γ001 = g 00 1 h0 (x) ∂1 g00 = に注意すると、 2 2h(x) h0 (x) 0 du + u dx = 0 ∴ h(x)du0 + u0 dh(x) = 0 h(x) ∴ d(h(x)u0 ) = 0 ∴ h(x)u0 = B (定数) 0 を得ます。一方、線素の式を dy 2 で割ると、運動が x-y 平面内 (z = 0) に限られ ると仮定して、 µ ¶2 µ ¶2 µ ¶2 µ ¶2 dτ dt dτ dx = h(x) − −1 dy dτ dy dy ですが、上の結果から、dy/dτ = u2 = A および dt/dτ = u0 = B/h(x) なので、 これらを代入して、 µ ¶2 µ ¶2 1 B2 dx dx C = − − 1 ∴ = −D A2 A2 h(x) dy dy h(x) を得ます。ここで C = (B/A)2 > 0, D = A−2 + 1 > 1 はやはり定数で、これが粒 子の軌道を与える微分方程式になります。 上の微分方程式は、 Z y=± s h(x) C − Dh(x) dx と変形されますが、この積分は素朴に ξ = C − Dh(x) で積分変数を ξ に置換す れば実行できて、結果、 y=∓ 1 p C − Dh(x) + E Da となります。E は積分定数です。この式は、 C (x + a−1 )2 + (y − E)2 = 2 2 D D a ( C > 0, D > 1 ) と変形してみればわかるように、中心が座標の特異面 (地平面) x = −a−1 上にあっ て x 方向に長い楕円を意味しています。 ただし、地平面に到達するには無限の座標時間を要するため (∗) 、軌道は事実上 x > −a−1 に限られ、すなわち半楕円になります。粒子はリンドラー座標 (等加速 系) において楕円を描きながら地平面へと落下していき、地平面の近傍においては 軌道は地平面と垂直になります (図 5)。 22 図 5: リンドラー座標における粒子の軌道 ちなみに、粒子でなく光の場合を考えると、それは高エネルギー極限の粒子と 同様のはずで、dτ → 0 と考えればよいです。このとき A, B は共に限りなく大き くなり、D は 1 に収束します。よって軌道の式は、 (x + a−1 )2 + (y − E)2 = C a2 となり、すなわち軌道は真円になります。 これら結果自体は、ローレンツ座標における直線的な世界線をリンドラー座標 に変換することで、もっと簡単に確かめられますが、ここでは計算演習をかねて、 リンドラー座標において運動方程式を解きました。 2 2 2 2 2 2 (*注) 線素の式から、 B = h(x)(dt/dτ ) なので、粒 p dτ = h(x)dt − dl , dl = dx + dy . また、 −1 −2 子の速さは dl/dt = h(x)(1 − B h(x)) です。これは x → −a で 0 に漸近します。 23 索引 電荷 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 電荷保存則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 電磁相互作用の作用 . . . . . . . . . . . . . . . . . . . . . . 11 電磁テンソル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 電磁場 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 電磁場の作用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 同時刻の相対性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 特殊相対論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 特殊相対論の作用 . . . . . . . . . . . . . . . . . . . . . . . . 11 あ 一般相対性原理 . . . . . . . . . . . . . . . . . . . . . . . . . . .11 一般相対論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 ウラシマ効果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 運動する時計の遅れ . . . . . . . . . . . . . . . . . . . . . . . 5 運動量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 エーテル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 SI 単位系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 エネルギー運動量テンソル . . . . . . . . . . . . . . . 15 円柱座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 は 汎関数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 汎関数微分 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 光通信過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 ブースト . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 複合粒子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 双子のパラドックス . . . . . . . . . . . . . . . . . . . . . . . 6 保存カレント . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 か 回転系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 ガレージのパラドックス . . . . . . . . . . . . . . . . . . . 8 共変性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 空間計量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 空間座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 光行差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 光速一定の原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 光速の不変性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 固有時間 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 固有速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 ま マックスウェル方程式 . . . . . . . . . . . . . . . . . . . . 13 みかけの位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 ミンコフスキー空間 . . . . . . . . . . . . . . . . . . . . . . . 4 や さ 有効質量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 座標速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 時間座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 時空 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 元運動量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 4 元デルタ関数 . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4 元電流密度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4 元ポテンシャル . . . . . . . . . . . . . . . . . . . . . . . . . 11 自然単位系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 質量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 質量次元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 質量の非保存性 . . . . . . . . . . . . . . . . . . . . . . . . . . .17 重心系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 静的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 世界線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 相対性原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 相対性理論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 相対論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 速度の変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 ら リー微分 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 粒子の運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . 12 粒子の作用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 リンドラー座標 . . . . . . . . . . . . . . . . . . . . . . . . . . .21 ローレンツ因子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 ローレンツ計量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 ローレンツ座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 ローレンツ収縮 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 ローレンツ変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 ローレンツ力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 た 定常的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 24
© Copyright 2026 Paperzz