平成 26 年度 解析力学 講義ノート
[7](担当:井元信之)
平成 26 年度 解析力学 講義ノート
[7](担当:井元信之)
平成 26 年度 解析力学 講義ノート [7](担当:井元信之)
2014 年 6 月 12 日 2014 年 6 月 12
2014 年 6 月 12 日
前回の演習問題の答前回の演習問題の答
前回の演習問題の答
44
第 3 章 ラグランジュ形式の力学 — 一般編 —
[問 2.2]球座標において運動エネルギーが
[問 2.2]球座標において運動エネルギーが
[問 2.2]球座標において運動エネルギーが
" mm! ! 22 2 2 2 " m2 ! 22 " 2
"
m! 2
˙ θ
˙ + (r
˙ 2 sin2 θ
3.2.2 パラメトリック励振
φ
ψ
T =
x˙ +m
y˙ 2 !+2z˙T2 ==2
(r+
θ)
φ)
sin
θ
x˙2r"˙ ++y˙m
=
r
˙
+
(r
θ)
φ)
!˙ z˙2 + (r
"
2 T =
˙2 2 + (rφ)
˙ 2 sin2 θ
x˙ + y˙ 2+2 z˙ =
r˙ + (rθ)
2
2
【ブランコ漕ぎから分周回路、波長可変レーザー、量子情報のエンタングルメント発生まで】
で与えられることを示せ。
で与えられることを示せ。
Z
で与えられることを示せ。
解:球座標への変換解:球座標への変換
(2.46) 式より
(2.46) 式より
解:球座標への変換 (2.46) 式より
x y z
!"#$%&!!
!
$sin
˙x˙ cos
˙+
˙ θcos
˙ sin θ sin φ
x˙ = r˙ sin θ cos φ + θr
cosθφcos
−φ
φr
sinθφcos φ − φr
= r˙θsin
θr
˙ cos θrcos φ − φr
˙ sin θ sin φ
x˙ = r˙ sin θ˙cos φ + θr
˙ θcos
˙ sin θ cos φ
y˙ = r˙ sin θ sin φ + θry˙ cos
sinθφ!!!!ℓ
+ φr
cosθφsin φ + φr
= rθ˙ sin
sin
φ˙ +sin
θr
˙ cos θ sin φ + φr
˙ sin θ cos φ
y˙ = r˙˙sin θ sin φ + θr
˙ sin θ
z˙ = r˙ cos θ − θr sin θz˙ = r˙ cos θ − θr
φ θ ψ
˙ sin θ
z˙ = r˙ cos θ − θr
x y
z
解析力学)
氏名 "ξ
η
2
2
2
2
22
2
22
22
2
2 22
2
2
2
#22
2
2 2
2
22
2
2
22
2 2
2
(1)
ζ
x˙ +(3.55)
y˙ + z˙
=を導け。
rx
˙˙ sin
cosz˙ φ +
sin θ sin
+ y˙ θ +
= θ˙ rr˙ cos
sin θ cos φ + θφ˙ rr cos
cos φφ + φ˙ r sin θ sin
関して、
x˙ + y˙ + z˙
= r˙ sin θ cos φ + θ˙ r cos θ cos(4)
φ +ζ φ˙軸を
r sinθ θだけ倒す。
sin φ
2
(1)
2 2
2
2
2
φ
˙ +
˙ φsin
˙φzcos
˙φ −
˙ θcos
˙ θsin
˙ sin
˙ sin θ sin φ
ycos
2r˙ sin θ cos φ θr
cos θ2rcos
2r˙φsin
cosθφcos
φr
2θr
cos
φ φr
sin2θθr
˙ sinφθ−cos
θr
− θ2rsin
˙xsinφ θ−
φr
θ sin
cosφ θ cos φ φr
˙ 図cos
˙ sin θ sin φ − 2θr
˙ cos θ cos φ φr
˙ sin θ sin φ
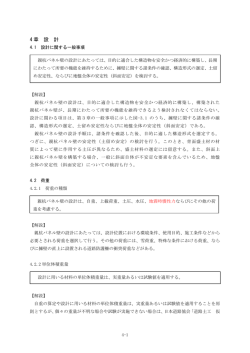
3.2:
支点が上下に動く振り子。
+
2
r
˙
sin
θ
cos
φ
θr
θ
cos
φ
−
2
r
˙
sin
θ
cos
φ
φr
2
+ r˙ 2 sin2 θ sin
φ ++θ˙2 rr˙22cos
sin22 θθ sin
sin22 φ
φ+
+φ
θ˙ 2 r2 sin
cos22 θθ cos
sin2 φ + φ˙ 2 r2 sin2 θ cos2 φ
+ r˙ 2 sin2 θ sin2 φ + θ˙2 r2 cos2 θ sin2 φ + φ˙ 2 r2 sin2 θ cos2 φ
˙ +
˙ φsin
˙φ cos
˙φ sin
˙ θ cos
˙ sin
˙ cos
˙ sin θ cos φ
図+3.2 2
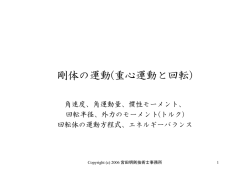
のように、支点が上下に動く単振り子を考える。たとえばブランコを漕ぐとき、ブランコが
r˙ sin θ sin φ θr
cos θ2sin
φ θ+sin
2r˙ φsinθr
sin θφsin
φr
2θr
θ sin
φ φr
r˙ sin
+θ2cos
r˙ sinφ θ+sin
φr
θ cos
+ 2θθr
cosφ θ sin φ φr
Y
˙ cos θ sin φ + 2r˙ sin θ sin φ φr
˙ sin θ cos φ + 2θr
˙ cos θ sin φ φr
˙ sin θ cos φ
+
2
r
˙
sin
θ
sin
φ
θr
ξ,θ2η,θ −ζ を
x, θy,
ξ θr
η方向に合わせる。
˙r2sin
˙z sin
前に振れるときも後ろに振れるときも同じように膝の屈伸運動を行う。つまり膝の屈伸の振動数を
+ r˙ 2 cos2 θ +2 θ˙2 r22+
sin2r˙θ22 −
22r˙ θcos
θθ˙2θr
cos
+まず
sin
2r˙ cos
θζ
2
2
˙
˙
+ r˙ cos θ +2θ2 r sin
θ −2222r˙ cos2θ θr sin
θ2 2 2
2
2ω0 =
とするとき、ブランコの揺れの振動数は
である。このように入力の振動数を半分(または整
r˙ 2 sin2 θ +2 r2 θ˙22 =
cos r˙θ2 +
r22 φ
2rrθ˙2θ˙+sin
r˙2θ˙θsin
φ2rr˙ θ˙ sin
sin
θ˙22+sin
r ω
θ˙θ20 +
cos
r2θφ˙cos
sinθ cos
θ + φ2r+
r˙ θ˙2r
sin
cosθθcos
cosθ2sin
φ+
θ cos θ sin2 φ
2
2
2
˙
˙
˙
˙
=X (
r˙ 2013.6.13
sin θ +2r 2θ 解析力学)
cos
θ +2r 2φ sin
θ + 2rr˙ θ sin θ cos θ cos φ + 2rr˙ θ sin θ cos θ sin φ
8
数分の1)にして出力することを「分周」という。
(3)
軸を倒す方角
+ r˙ 2 cos2 θ +2 r2 θ˙22+
sin r˙θ2 −
2r2 rθ˙2θ˙+sin
cos
r θθ˙cos
sinθ2 θζ −
2rr˙ θ˙ sin θ cos θ φ を決める。
2
˙ sin θ − 2rr˙ θ˙ sin θ cos θ
+
r
˙
cos
θ
+
r
θ
ブランコを特徴付けるのは長さ
"
と支点の位置である。これらのパラメーターを
2ω0 で変調する
2
= r˙ 2 + θ˙2 r2 2+ φ˙ 2 r2=
sinr˙22θ2+ 2θ˙2 r22+ φ˙ 2 r2 sin2 θ
(2)
2
˙ r励振される。このような励振をパラメトリック励振といい、電気
= r˙ + θ˙ r + φ
sin θ
(2)
とブランコの振幅は増幅される
—
+
x y
z
演習問題
演習問題
解析力学)
x(2013.6.13
y z
学籍番号 氏名 回路では分周回路として、レーザー物理ではパラメトリック発振器として、量子情報ではエンタング
44
第 3 章 ラグランジュ形式の力学 — 一般編 —
[問 2.3]球面振り子のラグランジアンを θ と φ の関数として書き、ラグランジュの運動方程式を書き下せ。
析力学)
まず
ξ,
η, ζ を x, y, z 方向に合わせる。
学籍番号 氏名 解:
解:
ル光子対の発生方法として用いられる。図
3.2 はその基本となるモデルである。
[問 2.3]球面振り子のラグランジアンを
θ と φ の関数として書き、ラグランジュの運動方程式を書き下せ。
[問 2.3]球面振り子のラグランジアンを
θ と φ の関数として書き、ラグランジュの運動方程式を書き下せ。
パラメトリック励振
解:
問 3.2.2
3.3: 天井走行クレーンに関して、
(3.55) を導け。
m ˙2 2 m ˙ 2 2 m
m ˙2 2 2
2 ˙2 2
L
=
θ
#
+
φ
#
sin
θ2θ−2#mg#
L
=
+2 cos
φ θ# sin θ − mg# cos θ
(
2013.6.13
解析力学)
m
m
2
2
2 L = 2θ˙ # + 2φ˙ # sin θ2 − mg# cos θ
【ブランコ漕ぎから分周回路、波長可変レーザー、量子情報のエンタングルメント発生まで】
2
2
演習問題
氏名 学籍番号 氏名 ˙ sin
= m#∂Lθ˙ ,
= m#
φ˙ sin
+ m#
mg# φ
sin
θ θ cos θ + mg# sin θ
= m#
θ˙ ,! θ cos θ =
∂θ θ!"#$%&!!
∂θ
問 3.3: 天井走行クレーンに関して、
を導け。
˙∂,θ˙ ∂L = m#
˙ sin$θ (3.55)
∂ θ˙
= m#
φ
cos θ + mg# sin
θ
˙
∂θ
∂L
∂L ∂L
2
2
2
∂θ
#
$
∂L
22
2
#
$
2
2
2
#
∂L
∂L∂L
2 ˙
˙ sin2 θ ,
= m#∂L
φ sin2 θ 2,
=
=
m#02 φ∂L
2
˙
˙
∂φ
˙
∂φ
φ θ,
= m# φ∂sin
=0
∂φ
∂ φ˙
%
&
(4)
(3)
(4)
!!!!ℓ
d ∂L
∂L $ d ∂L¨
g
g
˙ 2∂L
−# ∂L
θ =−φ(3.55)
sin =
θ cos
θ + θ¨ =
sinφ˙θ2 sin
⇒ = 0 より
0 2より
θ cos θ + sin θ
問 3.3:⇒
天井走行クレーンに関して、
を導け。
d
∂L
g
˙
˙
dt ⇒∂ θ
∂θ −dt ∂=θ 0 より
∂θθ¨ = φ˙ sin θ#cos θ + sin θ
#
"
dt ∂ θ˙
∂θ
#
して、(3.55) を導け。
(3)
∂L
=0
∂φ
(5)
(6)
(5)
(6)
図 3.2: 支点が上下に動く振り子。
%
&
d ∂L
d ˙
%∂L & d ∂Ld ˙ ∂L2
⇒
− ∂L
φ sin dθ)
02
⇒ = 0 より
==
0 より
(φ sin2 θ) = 0
∂L ˙dt (−
図 3.2 のように、支点が上下に動く単振り子を考える。たとえばブランコを漕ぐとき、ブランコが
dt ⇒∂ φ˙ d ∂φ
dt
∂φ
dt
˙
∂
φ
−
= 0 より
(φ sin θ) = 0
dt ∂ φ˙
∂φ
dt
前に振れるときも後ろに振れるときも同じように膝の屈伸運動を行う。つまり膝の屈伸の振動数を
2ω0 とするとき、ブランコの揺れの振動数は ω0 である。このように入力の振動数を半分(または整
数分の1)にして出力することを「分周」という。8
ブランコを特徴付けるのは長さ " と支点の位置である。これらのパラメーターを 2ω0 で変調する
とブランコの振幅は増幅される — 励振される。このような励振をパラメトリック励振といい、電気
回路では分周回路として、レーザー物理ではパラメトリック発振器として、量子情報ではエンタング
ル光子対の発生方法として用いられる。図 3.2 はその基本となるモデルである。
問 3.28 正確には、ブランコの膝の屈伸は重心の位置の変調であり、
: 2 原子分子において、図を描いて
X, Y, Z, r, θ, φ を図示せよ。
! を変調している。しかし効果としては同様なので、ここで
、図を描いて X, Y, Z, r, θ, φ を図示せよ。
は簡単のため支点の位置の変調で話を進める。
(7)
(7)
3.2. 時間を含む扱い
45
いま z 軸を下向きにとり、支点の位置を zp とすると、振れ角が θ のときの質点 m の y 座標と z 座
標は、
y = " sin θ ,
⇒
T =
!
m "
2
z = " cos θ − zp
(3.57)
y˙ = "θ˙ cos θ , z˙ = −"θ˙ sin θ − z˙p
(3.58)
#2 "
#2 $ m "
#
"θ˙ cos θ + −"θ˙ sin θ − z˙p
=
"2 θ˙2 + 2"θ˙z˙p sin θ + z˙p2 (運動エネルギー)
2
(3.59)
⇒
U = −mgz = −mg (" cos θ − zp ) (位置エネルギー)
#
m " 2 ˙2
⇒ ラグランジアン L =
" θ + 2"θ˙z˙p sin θ + z˙p2 + mg (" cos θ − zp )
2
∂L
d ∂L
⇒
= m"2 θ˙ + m"z˙p sin θ ⇒
= m"2 θ¨ + m"¨
zp sin θ + m"z˙p θ˙ cos θ
˙
dt ∂ θ˙
∂θ
∂L
= m"z˙p θ˙ cos θ − mg" sin θ
∂θ
%
&
1
g
⇒ m"2 θ¨ + m"¨
zp sin θ + mg" sin θ = 0 ⇒ θ¨ +
z¨p +
sin θ = 0 (運動方程式)
"
"
(3.60)
(3.61)
(3.62)
(3.63)
(3.64)
ここで、支点の位置 zp を正弦的に zp = a sin(ωt) で振る。微小振動 θ # 1 を仮定すると、(3.64)
式は
'
(
% &2
a ω
2
¨
θ + ω0 1 −
sin(ωt) θ = 0
" ω0
第3章
46
(3.65)
ラグランジュ形式の力学 — 一般編 —
ただし ω0 は支点を変調しないときの単振り子の角振動数で ω0 ≡
!g
である。最終的には 2 周期ご
" #2
との分周を想定し ω = 2ω0 の場合を扱うが、まず一般の ω で話を進める。 a! ωω0
= α とおくと、
!
(3.65) 式は
θ¨ + ω02 [1 − α sin(ωt)] θ = 0
(3.66)
となる。これをマシュー(Mathiew)の微分方程式という。いま、これを θ とその時間変化 v ≡ θ˙ に
対する
θ˙ = v
v˙ = −ω02 [1 − α sin(ωt)] θ
(3.67)
という連立微分方程式に分解する。これを定数変化法で解くため、まず α = 0 のときの解を求める
と、振幅 A と位相 φ の二つの定数を用いて
θ = A cos(ω0 t + φ)
v = −ω0 A sin(ω0 t + φ)
(3.68)
となる。次に α #= 0 の場合、振幅 A や位相 φ も時間的に変化する(ただし振動数 ω や ω0 の振動に
比べてゆっくり)と考える。その上で (3.68) 式を (3.67) 式に入れると、まず (3.67) 上式 θ˙ = v から
˙ sin(ω0 t + φ) = −ω0 A sin(ω0 t + φ)
A˙ cos(ω0 t + φ) − A(ω0 + φ)
⇒
A˙ cos(ω0 t + φ) − Aφ˙ sin(ω0 t + φ) = 0
(3.69)
(3.70)
3.2. 時間を含む扱い
47
(3.67) 下式から
˙ cos(ω0 t + φ) = −ω 2 [1 − α sin(ωt)] A cos(ω0 t + φ)
−ω0 A˙ sin(ω0 t + φ) − ω0 A(ω0 + φ)
0
⇒
A˙ sin(ω0 t + φ) + Aφ˙ cos(ω0 t + φ) = −ω0 Aα sin(ωt) cos(ω0 t + φ)
(3.71)
(3.72)
(3.70) 式と (3.72) 式を連立させ、A˙ と φ˙ を分離した式にすると
A˙ = − ω20 Aα sin(ωt) sin 2(ω0 t + φ)
(3.73)
φ˙ = − ω20 α sin(ωt) [1 + cos 2(ω0 t + φ)]
となる。
ここでいよいよ ω ≡ 2ω0 とおくと、(3.73) 式は
A˙ =
φ˙ =
ω0 α
4 A [cos(4ω0 t) − cos(2φ)]
ω0 α
4 [− sin(2ω0 t) − sin(4ω0 t)
+ sin(2φ)]
(3.74)
となる。ここで、振動数 2ω0 や 4ω0 の正弦的変化は A や φ の時間変化に比べてはるかに速いので、
A˙ や φ˙ を時間積分したときの寄与は無視できるので、上式から省ける。
これを 回転波近似(rotating-wave approximation)または平均値近似という。そうすると (3.74) 式は
ω0 α
˙
A = − 4 A cos(2φ)
(3.75)
φ˙ = ω0 α sin(2φ)
4
第3章
48
ラグランジュ形式の力学 — 一般編 —
となる。これを解くため
とおくと、
u ≡ A cos φ
w ≡ A sin φ
したがって
u˙ = A˙ cos φ − Aφ˙ sin φ
w˙ = A˙ sin φ + Aφ˙ cos φ
$ ω α
%
$ω α
%
$ω α%
$ω α%
0
0
0
0
u˙ = −
A cos(2φ) cos φ − A
sin(2φ) sin φ = −A
cos φ = −
u
4
4
4
4
$ ω α
%
$ω α
%
$ω α%
$ω α%
0
0
0
0
w˙ = −
A cos(2φ) sin φ + A
sin(2φ) cos φ = A
sin φ =
w
4
4
4
4
したがって
$ ω α %
0
u = u0 exp −
t
4
および
ところで (3.68) の上式、そして (3.76) の左の式より
w = w0 exp
$ω α %
0
t
4
θ = A cos φ cos(ω0 t) − A sin φ sin(ω0 t) = u cos(ω0 t) − w sin(ω0 t)
(3.76)
(3.77)
(3.78)
(3.79)
(3.80)
これに (3.79) を入れて、
$ ω α %
$ω α%
0
0
θ = u0 exp −
t cos(ω0 t) − w0 exp
sin(ω0 t)
4
4
(3.81)
3.2. 時間を含む扱い
49
46
第 3 章 ラグランジュ形式の力学
— 一般編 —
となって、振れ角
θ は時間が経つにつれ cos(ω0 t) の振幅は減衰し、
sin(ω0 t) の振幅は増幅(すなわち
励振)される。電気回路、電磁波、光においてこのような位相選択性増幅は「パラメトリック増幅」
ところで (3.68) の上式、そして (3.76) の左の式より
と呼ばれる。増幅出力を入力にフィードバックして発振を起こすことを「パラメトリック発振」と呼
θ = A cos φ cos(ω0 t) − A sin φ sin(ω0 t) = u cos(ω0 t) − w sin(ω
(3.80)
0 t)なので、量子力学
ばれ、波長可変レーザーとして用いられる。量子力学では光子のエネルギーは
¯hω
的パラメトリック励振においてはエネルギー保存を満たすため 2ω0 の光子一個が ω0 の光子 2 個に変
これに (3.79) を入れて、
換されることになる。これはパラメトリック下方変換と呼ばれ、エンタングルした双子の光子の発生
! ω α "
!ω α"
0
0
θ
=
u
exp
−
t
cos(ω
t)
−
w
exp
sin(ω0 t)
(3.81)
0
0
0
に利用される。
4
4
パラメトリック振り子を天井走行クレーンと対比すると、天井走行クレーンで支点を水平に ω で
となって、振れ角 θ は時間が経つにつれ cos(ω0 t) の振幅は減衰し、sin(ω0 t) の振幅は増幅(すなわち
振ったとき共振条件は ω ! ω0 であったが、支点を垂直方向に振るパラメトリック振り子の場合は
励振)される。電気回路、電磁波、光においてこのような位相選択性増幅は「パラメトリック増幅」
ω ! 2ω0 が共振条件であった。この違いは単に共振周波数が倍違うというだけでなく、振り子が調和
と呼ばれる。増幅出力を入力にフィードバックして発振を起こすことを「パラメトリック発振」と呼
振動子として扱われる量子力学に進むと、量子化した波状の外力の 1 粒子が振り子の振動を量子化
ばれ、波長可変レーザーとして用いられる。量子力学では光子のエネルギーは ¯
hω なので、量子力学
した 1 粒子に変換されるか、はたまた 2 粒子に変換されるかという大きな違いがある。前者は単な
的パラメトリック励振においてはエネルギー保存を満たすため 2ω0 の光子一個が ω0 の光子 2 個に変
る共振現象であるが、後者はエンタングルメント(量子もつれ)発生という新局面が開かれる。
換されることになる。これはパラメトリック下方変換と呼ばれ、エンタングルした双子の光子の発生
に利用される。
パラメトリック振り子を天井走行クレーンと対比すると、天井走行クレーンで支点を水平に
ωで
3.2.3
回転座標系
振ったとき共振条件は ω " ω0 であったが、支点を垂直方向に振るパラメトリック振り子の場合は
回転座標系は座標変換が陽に時間を含む典型例である。等速直線運動する座標系(ガリレイ変換に
ω " 2ω0 が共振条件であった。この違いは単に共振周波数が倍違うというだけでなく、振り子が調和
よる動く座標)であれば慣性系であるが、回転座標系は慣性系ではないため、みかけの力がいろいろ
振動子として扱われる量子力学に進むと、量子化した波状の外力の 1 粒子が振り子の振動を量子化
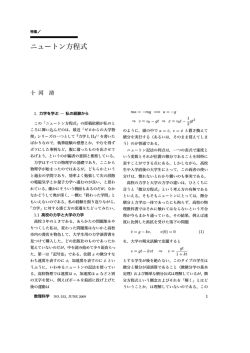
発生する。デカルト座標 x, y を角度 θ だけ回転した座標を X, Y とすると
した 1 粒子に変換されるか、はたまた 2 粒子に変換されるかという大きな違いがある。前者は単な
X
=
x
cos
φ
+
y
sin
φ
る共振現象であるが、後者はエンタングルメント(量子もつれ)発生という新局面が開かれる。
(3.82)
Y = −x sin φ + y cos φ
Z=z
3.2.3
回転座標系
の関係にある。これも慣性系のデカルト座標である。しかし角度が φ = ωt のように時間に比例して
回転座標系は座標変換が陽に時間を含む典型例である。等速直線運動する座標系(ガリレイ変換に
増える場合、
よる動く座標)であれば慣性系であるが、回転座標系は慣性系ではないため、みかけの力がいろいろ
X(t) = x cos ωt + y sin ωt
発生する。デカルト座標 x, y を角度
θ
だけ回転した座標を
X,
Y
(3.83)
Y (t) = −x sin ωt + y cos ωt とすると
Z=
Xz= x cos φ + y sin φ
となる。この X, Y, Z を一般座標としたのが回転座標系である。これを逆に解いた
(3.82)
Y = −x sin φ + y cos φ
Z=z
x = X cos ωt − Y sin ωt
(3.84)
の関係にある。これも慣性系のデカルト座標である。しかし角度が
φ = ωt のように時間に比例して
y = X sin ωt + Y cos ωt
増える場合、
z=Z
X(t) = x cos ωt + y sin ωt
を使うと
(3.83)
Y (t) = −x sin ωt + y cos ωt
x˙ = X˙ cos ωt − Y˙ sin ωt − ω(X sin ωt + Y
cos
ωt)
Z=z
(3.85)
y˙ = X˙ sin ωt + Y˙ cos ωt + ω(X cos ωt − Y sin ωt)
となる。この X, Y, Z を一般座標としたのが回転座標系である。これを逆に解いた
z˙ = Z˙
したがって運動エネルギーは
x = X cos ωt − Y sin ωt
(3.84)
y
=
X
sin
ωt
+
Y
cos
ωt
m
m
˙
T = (X˙ 2 + Y˙ 2 + Z˙ 2 ) + mω(X Y˙ − Y X)
+ ω 2 (X 2 + Y 2 )
(3.86)
2
2
z=Z
を使うと
3.2. 時間を含む扱い
47
x˙ = X˙ cos ωt − Y˙ sin ωt − ω(X sin ωt + Y cos ωt)
y˙ = X˙ sin ωt + Y˙ cos ωt + ω(X cos ωt − Y sin ωt)
z˙ = Z˙
(3.85)
したがって運動エネルギーは
T =
m ˙2
˙ + m ω 2 (X 2 + Y 2 )
(X + Y˙ 2 + Z˙ 2 ) + mω(X Y˙ − Y X)
2
2
(3.86)
となる。いま力は元の座標 x, y, z で保存力すなわちポテンシャル U (x, y, z) から導かれる力とする
と、回転座標系では (3.84) を使って X(t), Y (t), Z(t) の関数となる。そうしてできた U (X, Y, Z) は
˙ Y˙ , Z˙ は含んでいない。そのことに注意してラグランジュ
X, Y, Z を通じて t を陽に含んでいるが、X,
の運動方程式を立てると
¨ = − ∂U + 2mω Y˙ + mω 2 X
mX
∂X
∂U
2
¨
˙
mY = − ∂Y − 2mω X + mω Y
mZ¨ = − ∂U
(3.87)
∂Z
となる。右辺第二項は初等力学でなじみ深いコリオリの力、第三項は遠心力である。ここでコリオリ
の力は (3.86) 右辺第二項から生じており、遠心力は第三項から生じていることに注意されたい。こ
のことは次節で電磁場中の荷電粒子のラグランジアンを求めるときに立ち戻る。
ところで極座標(これは動く座標系ではない)の r の加速度に関する (2.34) 式にも遠心力が現れ
るが、これとの関係はどうなっているだろうか。いま x, y も X, Y も極座標で表してみよう。
x = r cos θ , y = r sin θ
(3.88)
X = R cos Θ , Y = R sin Θ
(3.89)
したがって
48
X = x cos ωt + y sin ωt = r cos θ cos ωt第
+ 3r 章
sin θ ラグランジュ形式の力学
sin ωt = r cos(ωt − θ)
(3.90)—
— 一般編
これが R cos Θ に等しいのだから、R = r、Θ = θ − ωt(または ωt − θ、しかし y と Y の同様の比
したがって
較により θ − ωt)となる。すなわち極座標で書けば静止座標系と回転座標系は
X = x cos ωt + y sin ωt = r cos θ cos ωt +
(3.90)
r sin θ sin ωt = r cos(ωt − θ)
R=r
(3.91)
ΘΘ
==
θ−
ωtωt(または ωt − θ、しかし y と Y の同様の比
これが R cos Θ に等しいのだから、R = r、
θ−
Z=z
較により θ − ωt)となる。すなわち極座標で書けば静止座標系と回転座標系は
という(当然の)関係になる。さて (3.84) と
R(3.89)
= r を組み合わせて回転座標系の極座標でラグラン
ジュの運動方程式を立てると、ベクトルの形式で
(3.91)
Θ = θ − ωt
R cos Θ
Z=z
%
&2
¨
˙
˙
mR = −∇R U (R) + 2mR × ω
# + m Θ + ω R sin Θ
(3.92)
という(当然の)関係になる。さて (3.84) と (3.89) を組み合わせて回転座標系の極座標でラグラン
0
ジュの運動方程式を立てると、ベクトルの形式で
となる。ただし ω
# は角速度ベクトルすなわち大きさが ω で向きが右ねじの進行方向(今の場合
+z
R cos Θ
%
&2
方向)のベクトルである。(3.92) を静止極座標における (2.34)
¨ = −∇R U (R) + 2mR
˙ ×ω
˙ 式のベクトル形式版:
mR
# +m
(3.92)
R sin Θ
Θ + ω
r cos θ
0
2
˙
m¨r = −∇r U (r) + mθ r sin θ
(3.93)
となる。ただし ω
# は角速度ベクトルすなわち大きさがω で向きが右ねじの進行方向(今の場合
+z
0
方向)のベクトルである。(3.92) を静止極座標における (2.34) 式のベクトル形式版:
r cos θ
m¨r = −∇r U (r) + mθ˙2 r sin θ
(3.93)
0
と比較すれば、確かに (3.92) 右辺第三項と (3.93) 右辺第二項は角速度を ω だけずらした以外は対応
しており、遠心力に相当していることがわかる。なお、静止系(慣性系)の極座標表示に現れる遠心
力は、静止系にある観測者が実際に感じる力ではない。しかし (3.92) 右辺第二項のコリオリの力や
m¨r = −∇r U (r) + mθ˙2 r sin θ
0
(3.93)
と比較すれば、確かに (3.92) 右辺第三項と (3.93) 右辺第二項は角速度を ω だけずらした以外は対応
3.2. 時間を含む扱い
49
しており、遠心力に相当していることがわかる。なお、静止系(慣性系)の極座標表示に現れる遠心
3.2.4
速度に依存する力 (1) — ローレンツ力
力は、静止系にある観測者が実際に感じる力ではない。しかし
(3.92) 右辺第二項のコリオリの力や
第三項の ω だけずれた効果による遠心力は、回転座標系とともにある観測者が実際に感じる力であ
ラーモアの定理
る。コリオリの力は速度に比例するが方向は速度と垂直であり、仕事はしない。
静止系(慣性系)でも現れる速度に依存する力の例としてローレンツ力がある。電荷 e を持つ9 質
回転座標系におけるラグランジアンは (3.86) から U を引いたものであるが、ここで新たに
量 m の質点が電場 E および磁束密度 B がある空間を速度 v= r˙ で進むとき、ローレンツ力
m
T ! = (X˙ 2 + Y˙ 2 + Z˙ 2 )
(3.94)
2
F = e(E + v × B)
(3.96)
˙ − m ω 2 (X 2 + Y 2 )
U ! = U − mω(X Y˙ − Y X)
(3.95)
2
が働く。いま電場は電位ポテンシャル
φ(r) から E = −∇φ によって導かれるとすると、運動方程式は
と定義すると、T ! − U ! は同じラグランジアンになる。この U ! は一般ポテンシャル(generalized
potential)あるいは一般化ポテンシャルと呼ばれる。回転座標系とともにある観測者にとっては、質
m¨r = −e∇φ + e r˙ × B
(3.97)
点の運動エネルギーは T ! と思う一方、速度にも依存する U ! という一種のポテンシャルの下で運動
となって、形式上
(3.92) で遠心力を除いたものと同じになる。であるならば、ラグランジュの運動
している、というように見える。コリオリの力をこのように「
U ! にしまい込む」ことができるのは、
方程式から
(3.92) を導いた手順の逆に類推することにより、(3.97) を与えるラグランジアンを決め
コリオリの力が仕事をしないことによる。
ることができる。それは
ポテンシャル U が軸対称でない場合は、元々の U (r) が時間に依存せず空間に固定されていたとし
前節の回転座標系と状況を合わせるため、磁場は
z 方向に一様な
ても、
U (R) は時間 t に依存することになる。その中を動く質点の運動方程式は複雑化する。ポテン
シャルが軸対称であれば、U (R) も空間だけの関数となり、回転座標系は使いやすいものとなる。
0
B= 0
(3.98)
B
3.2.4 速度に依存する力 (1) — ローレンツ力
とすると、
(3.97) は
ラーモアの定理
m¨
x = −e ∂φ
+
eB
y
˙
∂x
3.2. 時間を含む扱い
∂φ
m¨
y = −e ∂y − eB x˙
∂φ
3.2.4 速度に依存する力 (1) —
ローレンツ力
m¨
z = −e
49
(3.99)
∂z
これと
(3.87) を比べると、(3.87) 右辺の第三項に相当するものが (3.99) にない以外は全く同じ形を
ラーモアの定理
している。(3.87) 右辺の第一、第二、第三項のもとになったのがそれぞれ (3.86) 右辺の第一、第二、
静止系(慣性系)でも現れる速度に依存する力の例としてローレンツ力がある。電荷 e を持つ9 質
第三項であったことを考えると、運動方程式 (3.99) を導くラグランジアンは
量 m の質点が電場 E および磁束密度 B がある空間を速度 v= r˙ で進むとき、ローレンツ力
m
eB
L = (x˙ 2 + y˙ 2 + z˙ 2 ) +
(xy˙ − y x)
˙ − eφ
(3.100)
2
F = e(E + v2 × B)
(3.96)
であることがわかる。特に電位ポテンシャル φ が z 軸対称性を持つ場合、回転座標系でも形は変わら
が働く。いま電場は電位ポテンシャル φ(r) から E = −∇φ によって導かれるとすると、運動方程式は
ず見かけの時間変化もないので、それを運動エネルギー (3.86) から引き算することにより得られる
ラグランジアンを見ると、遠心力を除きm¨
(3.100)
と同じであることがわかる。つまり
(3.100) の eB/2
r = −e∇φ
+ e r˙ × B
(3.97)
を mω と置き換えれば、(3.86) 第二項のコリオリの力となる。このことから「z 方向の静磁場 B は
となって、形式上 (3.92) で遠心力を除いたものと同じになる。であるならば、ラグランジュの運動
2mω/e の角速度で回る回転座標系と(遠心力を除けば)同じ」となる。この ω = eB/2m をラーモ
方程式から (3.92) を導いた手順の逆に類推することにより、(3.97) を与えるラグランジアンを決め
ア周波数という。一方で、電磁気学でなじみ深い荷電粒子のサイクロトロン運動の角振動数(サイク
ることができる。それは
ロトロン振動数)は ω = eB/m である。この辺の関係を見る。
前節の回転座標系と状況を合わせるため、磁場は z 方向に一様な
(3.100) の第一項は運動エネルギー、第三項は静電ポテンシャルである。磁場に関する第二項はど
0
ちらでもないが、これを「ポテンシャルにしまい込む」ことを考えよう。それは
(3.95) を踏襲して
B= 0
(3.98)
新たなポテンシャルを
eB
U (x, y, z, x,
˙ y)
˙ = − B(xy˙ − y x)
˙ + eφ
(3.101)
2
とすると、(3.97) は
9 ここで
e は電荷一般を指す。陽子であれば e は電気素量であり、電子の場合は電気素量にマイナスを付けたものである。
m¨
x = −e ∂x + eB y˙
∂φ
m¨
y = −e ∂φ
˙
∂y − eB x
m¨
z = −e ∂φ
∂z
(3.99)
とすると、(3.97) は
B
m¨
x = −e ∂φ
+
eB
y
˙
∂x
∂φ
m¨
y = −e ∂y − eB x˙
∂φ
m¨
z = −e
(3.99)
∂z
これと (3.87) を比べると、(3.87) 右辺の第三項に相当するものが (3.99) にない以外は全く同じ形を
している。(3.87) 右辺の第一、第二、第三項のもとになったのがそれぞれ (3.86) 右辺の第一、第二、
第三項であったことを考えると、運動方程式 (3.99) を導くラグランジアンは
L=
m 2
eB
(x˙ + y˙ 2 + z˙ 2 ) +
(xy˙ − y x)
˙ − eφ
2
2
(3.100)
であることがわかる。特に電位ポテンシャル φ が z 軸対称性を持つ場合、回転座標系でも形は変わら
ず見かけの時間変化もないので、それを運動エネルギー (3.86) から引き算することにより得られる
ラグランジアンを見ると、遠心力を除き (3.100) と同じであることがわかる。つまり (3.100) の eB/2
を mω と置き換えれば、(3.86) 第二項のコリオリの力となる。このことから「z 方向の静磁場 B は
2mω/e の角速度で回る回転座標系と(遠心力を除けば)同じ」となる。この ω = eB/2m をラーモ
ア周波数という。一方で、電磁気学でなじみ深い荷電粒子のサイクロトロン運動の角振動数(サイク
ロトロン振動数)は ω = eB/m である。この辺の関係を見る。
(3.100) の第一項は運動エネルギー、第三項は静電ポテンシャルである。磁場に関する第二項はど
ちらでもないが、これを「ポテンシャルにしまい込む」ことを考えよう。それは (3.95) を踏襲して
新たなポテンシャルを
U (x, y, z, x,
˙ y)
˙ =−
50
9 ここで
eB
(xy˙ − y x)
˙ + eφ
2
(3.101)
e は電荷一般を指す。陽子であれば e は電気素量であり、電子の場合は電気素量にマイナスを付けたものである。
第3章
ラグランジュ形式の力学 — 一般編 —
とすればよい。次にこれを ω で回転する回転座標系で表現してみる。(3.84) と (3.85) を使うと、
xy˙ − y x˙ = X Y˙ − Y X˙ + ω(X 2 + Y 2 )
(3.102)
となるので、これと 12 (x˙ 2 + y˙ 2 + z˙ 2 ) に対応する (3.86) を組み合わせると、(3.100) は
!
"
!
"
m ˙2
eB
mω
eB
2
2
˙
˙
˙
˙
L = (X + Y + Z ) + m ω +
(X Y − Y X) +
ω+
(X 2 + Y 2 ) − eφ! (3.103)
2
2m
2
m
あるいは回転座標系の一般ポテンシャル U ! に磁場と電場を組み込んで
!
"
!
"
eB
˙ − mω ω + eB (X 2 + Y 2 ) − eφ!
U ! = −m ω +
(X Y˙ − Y X)
2m
2
m
(3.104)
を得る。φ! は回転座標で見た静電場で、一般に時間を含む。しかしもし z 軸対称性があるならば、こ
れはもちろん φ そのものである。
仮に ω として ω = −eB/m を選んだとしよう。すると遠心力は打ち消されて
U! =
eB
˙ − eφ!
(X Y˙ − Y X)
2m
(3.105)
となる。すなわちサイクロトロン周波数で回転する座標で見れば、コリオリの力だけが残る。ここで
注意すべきは、遠心力が打ち消されるといっても、勝手に選んだ z 軸回りにサイクロトロン運動する
粒子の遠心力を打ち消したに過ぎない。サイクロトロン運動はあちこちで様々な半径の円運動として
起こっているので、そういう大多数の粒子に対しては遠心力を打ち消してはいないし、コリオリの力
はもちろん残るので、ω = −eB/m の選択はあまり意味がない。
一方、ω として ω = −eB/2m を選んだとしよう。今度はコリオリの力が打ち消されて
U =
!
m
!
eB
"2
#
$
X 2 + Y 2 − eφ!
(3.106)
粒子の遠心力を打ち消したに過ぎない。サイクロトロン運動はあちこちで様々な半径の円運動として
起こっているので、そういう大多数の粒子に対しては遠心力を打ち消してはいないし、コリオリの力
はもちろん残るので、ω = −eB/m の選択はあまり意味がない。
一方、ω として ω = −eB/2m を選んだとしよう。今度はコリオリの力が打ち消されて
m
U =
2
!
!
eB
2m
"2
#
$
X 2 + Y 2 − eφ!
(3.106)
となる。コリオリの力は速度に比例するので、粒子がどこで運動していようと等しく打ち消される。
すなわちラーモア周波数で回転する座標で見れば、どの荷電粒子に対しても遠心力(z 軸回りの)だ
けが残る。打ち消した結果残った (3.106) 右辺第一項は B 2 に比例しているので、|B| が小さい場合は
遠心力は初めから無視できるし、残ったコリオリの力はどの粒子に対しても打ち消すことができる。
そこで我々は ω = −eB/2m を選んで、(3.106) において遠心力も無視できる弱い磁場の場合を考えよ
う。このとき U ! = −eφ! となる。さらに φ に z 軸対称性があれば φ! = φ だから、以上の結果は、Bz の
下での運動は Bz = 0 としたときの運動を ω = −eB/2m で回転する座標系で見た運動と同一である
ということを意味している。これを ラーモアの定理(Larmor theorem)といい、このときの周波数
を ω = eB/2m を ラーモア周波数(Larmor frequezncy)またはラーモア振動数という。特に円環状
に動く荷電粒子があった場合、その円環軌道自体がラーモア周波数で回転することになる。円環状
に動く荷電粒子は磁束密度を発生することを考えると、その磁束密度自体がラーモア周波数で回転
することを意味する。さらに、電子その他の素粒子や原子核にスピンがある場合、スピンは荷電粒
子の円環運動により発生しているわけではないが同じく磁石であるので、そのスピンの向きがラー
モア周波数で回転することになる。これをスピンの 歳差運動(precession)という。コマの歳差運動
と同じである。その周波数に合わせた電磁波(通常 RF 波すなわちラジオ周波数の電磁波)をスピ
ンに照射すると共鳴吸収が起こる。これは 核磁気共鳴(NMR:nuclear magnetic resonance)あるい
は 電子スピン共鳴(ESR*electron spin resonance)の原理になっている。核磁気共鳴の医療応用が
磁気共鳴映像法(MRI:magnetic resonance imaging)である。
3.3. 散逸関数
51
電磁場中の荷電粒子のラグランジアン
荷電粒子のラグランジアン (3.100) をベクトルポテンシャル A で表現しておく。静止系(慣性系)
のデカルト座標でそれは
L=
m 2
|˙r| + e (A · r˙ ) − eφ
2
(3.107)
で与えられる。このラグランジアンからローレンツ力が導かれることを見る。まず
∂L
= mx˙ + eAx ,
∂ x˙
より
d ∂L
dt ∂ z˙
∂L
= mz˙ + eAz
∂ z˙
"
∂Ax
∂Ax
∂Ax
∂Ax
+
x˙ +
y˙ +
z˙
∂t
∂x
∂y
∂z
!
"
∂Ay
∂Ay
∂Ay
∂Ay
= m¨
y+e
+
x˙ +
y˙ +
z˙
∂t
∂x
∂y
∂z
!
"
∂Az
∂Az
∂Az
∂Az
= m¨
z+e
+
x˙ +
y˙ +
z˙
∂t
∂x
∂y
∂z
d ∂L
= m¨
x+e
dt ∂ x˙
d ∂L
dt ∂ y˙
となる。一方
∂L
= my˙ + eAy ,
∂ y˙
∂L
=e
∂x
∂L
=e
∂y
∂L
=e
∂z
!
!
!
!
∂Ax
∂Ay
∂Az
∂φ
x˙ +
y˙ +
z˙ −
∂x
∂x
∂x
∂x
∂Ax
∂Ay
∂Az
∂φ
x˙ +
y˙ +
z˙ −
∂y
∂y
∂y
∂y
∂Ax
∂Ay
∂Az
∂φ
x˙ +
y˙ +
z˙ −
∂z
∂z
∂z
∂z
"
"
"
と計算されるので、まず x に関するラグランジュの運動方程式は
!
"
!
"
∂Ax
∂Ax
∂Ax
∂Ax
∂Ax
∂Ay
∂Az
∂φ
m¨
x+e
+
x˙ +
y˙ +
z˙ = e
x˙ +
y˙ +
z˙ −
∂t
∂x
∂y
∂z
∂x
∂x
∂x
∂x
(3.108)
(3.109)
(3.110)
(3.111)
(3.112)
(3.113)
(3.114)
(3.115)
∂y
∂L
=e
∂z
!
∂y
∂y
∂y
∂y
∂Ax
∂Ay
∂Az
∂φ
x˙ +
y˙ +
z˙ −
∂z
∂z
∂z
∂z
"
(3.114)
と計算されるので、まず x に関するラグランジュの運動方程式は
!
"
!
"
∂Ax
∂Ax
∂Ax
∂Ax
∂Ax
∂Ay
∂Az
∂φ
m¨
x+e
+
x˙ +
y˙ +
z˙ = e
x˙ +
y˙ +
z˙ −
∂t
∂x
∂y
∂z
∂x
∂x
∂x
∂x
(3.115)
すなわち
m¨
x =
=
同様に
m¨
y =
m¨
z =
!
"
!
"
!
"
∂φ ∂Ax
∂Ay
∂Ax
∂Ax
∂Az
−e
+
+e
−
y˙ − e
−
z˙
(3.116)
∂x
∂t
∂x
∂y
∂z
∂x
#
$
#
$
˙
˙
−e ∇φ + A
+ ey˙ (∇ × A)z − ez˙ (∇ × A)y = −e ∇φ + A
+ e [˙r × (∇ ×(3.117)
A)]x
x
x
#
$
˙
−e ∇φ + A
+ e [˙r × (∇ × A)]y
y
#
$
˙
−e ∇φ + A
+ e [˙r × (∇ × A)]z
z
(3.118)
(3.119)
となるので、(3.117)(3.118)(3.119) をまとめると
m¨r = eE + e (˙r × B)
(3.120)
となってローレンツ力が導かれる。ここで E = −∇φ − (∂A/∂t) および B = ∇×A を使った。
3.3
3.3.1
散逸関数
速度に依存する力 (2) — 粘性力
粘性のある流体中を物体が移動するとき、粘性抵抗が働いて物体を静止させようとする。この粘
性抵抗による力 F は、物体の移動速度 v の大きさに比例し、向きは逆向きとなる。流体中に限らず、
© Copyright 2026 Paperzz