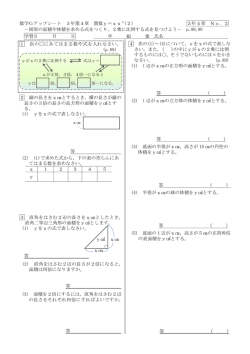
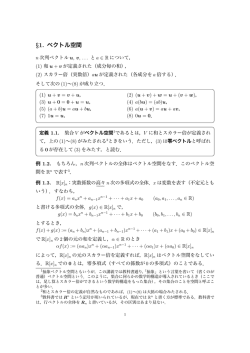
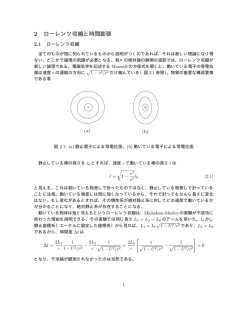
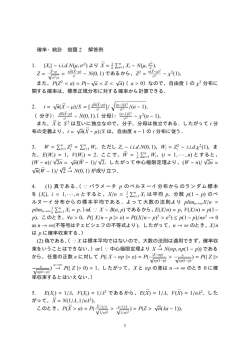
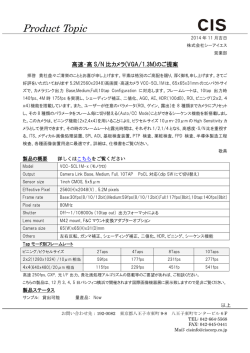
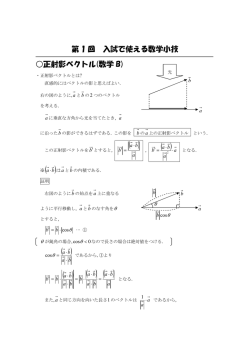
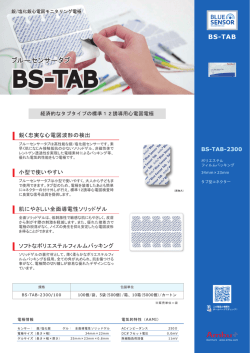
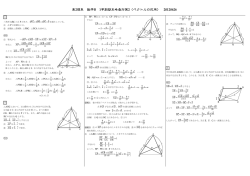
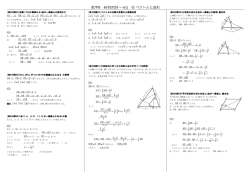
7−2.各 種探査機器 の解析方法 (1)両コ イル型磁気 傾度計 ↑ 増幅器へ コイル コイル 図7−1 両コイル型 磁気傾度計 構成図 (解析方法 ) 単磁極モデ ルによる理 論式 磁性体の帯 磁は複雑で 正確に捕ら えることは 難しいが、 機雷、爆弾 、砲弾のよ うな形状の ものはN, S2極に帯 磁している と考えてら れる。 今、磁極の 一つが検知 器からZの 距離に埋没 しているも のとし、単 極モデルを 想定してみ ると図7− 2ようにな る。 x センサー C2 C1 r z O O1 埋没している鉄類 O2 図7−2 単磁極モデ ルによる理 論式 - 96 - 地 面 この鉄類O 1 ,O 2 の上 をコイルC 1 ,C 2 を持 つ検知器が 地表に平行 に移動する 場合を考え る。今 、M を磁性体の 一端、O 1 の磁気量と し、C 1 ,O 1 間の距 離 をr とすると、 検知器の一 端に働く磁 場の強さP は M r2 P= ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(1 ) と表せる。 この強さP は、O 1 ,C 1 方向間 に 働くもので あるから、これをX方 向 すなわち水 平成分にす ると、図7 − 3から x C1 X r y X C1O X = = P C1O1 r P Y ゆえに X= P・x r O ・・・・・ ・・・(2) O1 図7− 3 ベクト ル図 (1)式を(2)式に代 入すれば磁 場の強さの 水平成分X は、 X= M・x r3 ・・・・・ ・・・・・ ・・・・・ ・・・・・ ・・・・・ ・・・・ (3) となる。ま た、両コイ ル型磁気傾 度計の検知 器で測定さ れるのは、コイルの移 動 により生じ る磁場の変 イヒによる 起電力(E)であるから E= ここで DX DX Dx = ・ Dt Dx Dt ・・・・・ ・・・・・ ・・・・・ ・・・・・ ・・・ ・ (4) DX は場所 による磁力 の変化 Dx Dx = V は センサーの 移動速度 Dt である。(3)式及び 速度Vを(4)に代入 すれば、 E= d ⎛ M・x⎞ d ⎛x⎞ ⎜ ⎟ ⎜ 3 ⎟・V = V・M・ dx⎝ r ⎠ dx⎝r3 ⎠ - 97 - ・・・・・ ・・・・・ ・・・・・ (5) 2 2 1/2 また、図7 −3よりr=(x +y ) である から、これ を(5)式に 代入して微 分す れ ば z2−2x2 d ⎛x⎞ V・M・ E = V・M・ = ⎜ ⎟ dx⎝r3 ⎠ r5 ・・・・・・・・・・・・・(6) となる。(6)式を変 形して(7)式となる。 E z2−2x2 = M・ V r5 ・・・・・・・・・・・・・・・・・・・・・・・・(7 ) dX E = dx V 今場所によ る磁力の変 化 て を縦軸 に、図6 − 3の水平距 離xを横軸 にとっ グラフにす ると図7− 4になる。 dX E dx = V a A c b x 0 e T T d 図7−4 検知器一端 のコイルに よる単極の 波形 - 98 - 図7−4よ りxと dX E = dx V の 関係を求め る。点b,cは(6)式 のE=0の と き であるから 、 z2−2x2 =0 すなわ ち 点a,b, eについて は、 x= ± 1 ・z 2 ・・・・・・・・・・・・・・・・・(8) d2X dE =0 の時 であるから = 0 、すな わち dx dx2 d2 d ⎛z2−2x2 ⎞ 3x(2x2−3z2) ⎟ ⎜ X= M ⎟=M dx⎜⎝ dx2 r5 r5 ⎠ ゆえに 点aでは、x=0で ⎛z2 ⎞ dX = M⎜⎜ 5 ⎟⎟ dx ⎝r ⎠ 点d,e で は x = ± ⎛ −2z2 ⎞ dX 1 ⎟⎟ = M⎜⎜ ・z で 5 dx 2 ⎠ ⎝ r ・・・・・・・・・・・・・・・・・・(9 ) である。以 上の計算結 果から記録 の周期 T =ob =oc= ・・・・・・・・・(10 ) 1 ・z であり、周 期は 2 (センサー と磁極との 距離)に比 例する。 したがって 、周期を読 み取ればセ ンサーから の距離zが 計算できる 。この場合 、 記録紙の横 方向の長さ を実際の距 離に換算す る必要があ る。 両コイル型 磁気傾度計 では、コイ ルを2m間 隔に2個使 用している ので、記 録 紙上の磁気 波形は、2 m相当には なれて極性 が逆向きに 現れる。す なわち、図 6 −5の記録 紙上の長さ Lが2mに 相当する。 - 99 - 図7−4の Tは距離に 換算すれば 2T 2T =x となる。即 ち L L A a c b d センサーと 鉄類の距離 zをDとす れば (8)式は、 x= L 2T T T = ・z= ・D L 2 2 図7−5 傾度計によ る単極の波 形 ゆえに 2T D= 2 ・ L ・・・・・・・・・・・・・・・・・・・・・・・・・(11) となる また、図7 −5の dX = A から 、Aが最大 の時はx= 0の時で、 r=zとな り、 dx (9)式は、 ⎛z2 ⎞ M dX = M⎜⎜ 5 ⎟⎟ = 3 dx ⎝r ⎠ z ∴ ⎛dX ⎞ M =z3⎜ ⎟ ⎝dx⎠ となる。 すなわち、 振幅 dX = A は磁気 量に比例す る。 dx - 100 - ・・・・・・・・・・・(1 2 ) 探査記録の 解析に用い る計算式 一般には、 センサーの コイルが2 個あ って、N, Sの2極が あるので測 定記録 は、図7− 6のC 1 O 1 ,C 2 O 2 ,C 2 O 1 , C 1 O 2 の4 個の合 成 波形となる 。 しかし、実 際の波形は 埋没鉄類の 埋没 状況が鉛直 ・傾斜など さまざまで 、長さ や形がいろ いろと変化 しているの で測定 波形に変化 が出る。機 雷や爆弾を モデル に、周期と センサーま での距離が 、どの ような関係 にあるかを モデル缶体 の形態 別にコンピ ューターを 使用したモ デル計 算を行い、 機雷や、爆 弾の模擬缶 体測定 実騒と対比 して 、 図 7−7の波 形を想 定して、距 離z、磁気 量Mの解析 式を導 いた。 実際の記録 (合成 曲線 ) C1O1 C2O2 C1O2 磁気センサ C2 C1 C2O1 O1 埋没鉄 図7 −6 O 地表 1 1 合成 波形 すなわち 、距離を単極 型と双極型 に大きく分 け、それ ぞ れT 1 ,T 2 及び第2振 幅A 2 を 読 み取る。こ こでTは最 大振幅A 1 と第2振幅 A 2 の半 周 期から、 T= T1+T2 2 ・・・・・・・・・・・・・・・・・・・・・・・・・(13) とする。 深度Dは、 D= 2T ×1.485 L ただし T <0.4 L ・・・(1 4) D= 2T ×2.161−0.528 L ただし T L ≥0.4 となる。 磁気量の算 出は図6− 7の第2振 幅A 2 を 用 いるものと して次の計 算式で行う 。 M=K×A 2 ×D 3 ÷V ÷F(D) ・・・・・・・・・・・・・・・・(15) ここで、K は記録紙の 振幅の比率(増幅率 )を示す感度 係数、F(D)は磁 気 量を補正す る距離係数 (Tが距離 の増大と共 に理論式よ り長くなる ことの補 正)。 感度係数は 、距離D= 1m、速度 V=1m/ sec、磁 気量が1ガ ウス・c m 2 で振幅 が 1mmにな るとき、K =1とする 。 - 101 - (15)式で F(D)=1 として振幅 A 2 を求 め ると、 1 A2 = ・M × V ÷ D3 K ・・・・・・・・・・・・・・・・・・・・・(16 ) ここでV= 100cm/ sec,D=100cm, M=1ガウ ス・c㎡で [日本物理 炭鉱(株)(N.G.P.)単位]とす ると A2 = 1 1 ×1×100÷1003 = ×10−4 (ガウス/ sec)・・・・(1 7) K K となる。電 磁単位では 、1ガウス =10 5 γ であるから (17)式は 、 A2 = 1 ×10 (γ/se c)(N.G.P.単位 ) K となる。こ れをc.g.s.電磁単 位で測定し た結果と対 比すると、 A2 = 1 ×55 (γ/se c)(N.G.P.単位 )・・・・・・・・・・(18) K が得られて おり、N.G.P.単位 と、c.g.s.電磁単 位とは10:55の比 率 になってい る。現在、 磁気探査で 用いられる ガウス・c ㎡はN.G.P.単位で ある。 A1 A2 T2 (単極形) T1 A2 T1 A3 (双極形) T2 A1 図7−7 記録の読み 取り 表7−1 フラックス メーター型 磁気検知器 の性能 一般性能 作 動 温 度 耐 水 圧 装置性能 検知器形成 −5℃∼+70℃ 5kg/cm 増 幅 度 入力インピーダンス 出力インピーダンス フィルター 電 源 - 102 - 2 両コイル型磁気傾度計 48S−Ⅱ型 32dB 100kΩ 5kΩ ローパスフィルター(2Hz) AC 100V 以 下 に磁 気 探 査 の解 析 例 を示 す。 異 常 番 号 No1 磁気測定記録 測 線 番 号 No4 区 間 2∼3 (距 離 堤 4∼8m) 配 分 比 14% 磁気量 4.2μWb 埋 没 深 度 0.2m ①磁 気 記 録 の読 み取 り センサー移 動 速 度 V=2×記 録 紙 紙 送 り速 度 (cm/sec)÷2L =2×0.5÷1.0=1.0(m/s) (2L:2m に対 する記 録 紙 上 の長 さ(cm)) 記 録 読 み取 り T 1 =0.175cm 2L=1.0 T 1 =0.175m T 2 =0.15cm A 2 =23mm T=(T 1 +T 2 )/2=0.1625cm T は紙 送 り速 度 ,センサー移 動 速 度 により変 化 するので、紙 送 り速 度 を 1cm/sec,センサー移 動 速 度 を 1m/sec 時 の値 にする。 T =2・T・V=2×0.1625×1.0=0.325 K=2.5 A 2 =23mm ②磁 気 量 計 算 、センサーから磁 気 異 常 までの距 離 計 算 ①で得 られた T を下 式 に入 れて磁 極 間 距 離 D を算 出 する。 D=1.49・T K=1 T ≦0.8 D=2.16・T -0.53 T >0.8 記 録 例 では T ≦0.8 なので D=1.49×0.32≒0.48m となる。 T 2 =0.15cm 埋 没 深 度 は 0.48-0.3=0.18m となる。(センサー高 さ 0.3m) 磁 気 量 M=A×D 3 ×1/V×1/F(D)×K M:磁 気 量 (ガウス・cm 2 ) A 2 :第 2 振 幅 D:磁 極 間 距 離 V:センサー移 動 速 度 F(D):距 離 係 数 K:感 度 係 数 を以 下 に代 入 すると M=23×(0.48) 3 ×1/1.0×1/0.985×2.5 ≒6 ガウス・cm 2 *K=2.5、K=1 の 2 種類の 感度 ここで得 られた磁 気 量 M の単 位 はガウス・cm 2 なので、国 際 単 位 μWb へ 移 行 するため M に 0.7 を乗 じて換 算 する。 M (μWb)=M(ガウス・cm 2 )×0.7 =6×0.7≒4.2(μWb) - 70 -
© Copyright 2026 Paperzz