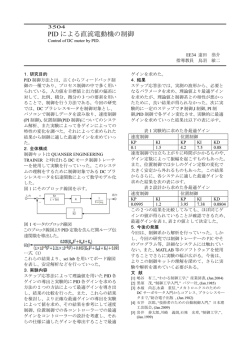
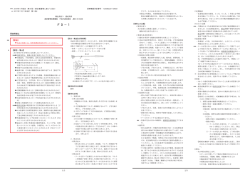
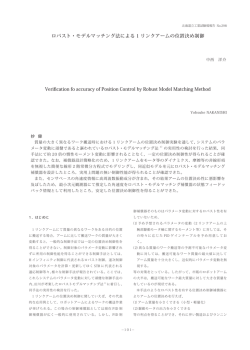
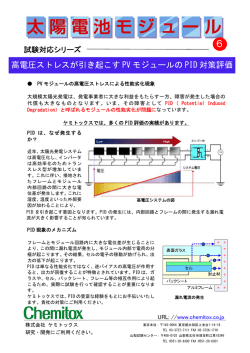
非共振型超音波モータ駆動ステージの制御パラメータモニタリング 熊本大学 :○古川博之,小磯公房,遠藤泰史,橋口弘幸,原田崇, 永本恵市,中田明良,久保田弘 有限会社熊本テクノロジー :小坂光二,岩渕哲也,馬場哲郎,江頭義也 太平洋セメント株式会社 :山川孝宏,渡邊雅幸 エンコーダ クロス ローラーガイド リニアスケール 制御ユニット リミット信号 リミットセンサ 制御信号 NRUSM 圧電アクチュエータ 図 2.NRUSM ステージシステム構成 目標速度 K(Vff) 比例項P 目標位置 + - モータ出力値 積分項I 微分項D 実際位置(スケール読み値) 図 3.NRUSM サーボモデル 情報は,リニアスケール/エンコーダ(ミツト ヨ:ST32A,最高分解能 10nm)を用いて検出 した. RS232C ステージ ガイドプレート 制御PC 2.NRUSM 駆動ステージシステム 図 1 は,本実験に用いた 100mm ストロー クステージ(シグマテック(株):全重量 2.1kg, 可動部重量 1.2kg,トップテーブル 180× 120mm)である. 図 2 は,本実験に用いたステージシステム の構成である.ステージ側面に取り付けられ たアルミナセラミックス製のガイドプレート に直接モータの先端を接触させている.制御 PC より入力された指令は,RS232C ケーブル により制御ユニットへ取りこまれる.制御ユ ニットは, PID 制御を採用しており,図 3 に示すように目標位置と実際位置の差分を取 り、比例項,積分項,微分項となる係数 P,I, D を掛けることでモータ出力値を計算し制御 信号を電圧振幅として出力する.また、位置 図 1.100mm ストロークステージ 位置情報 1.はじめに 驚異的な進歩を遂げている半導体集積回路 (LSI)においては,超精密位置決めと高速度か つ高精度移動が可能なステージの必要性が増 してきている.研究を進めている非共振型超 音 波 モ ー タ は NRUSM ( Nonresonant Ultrasonic Motor)[1]は,ナノメートルオー ダ以下の分解能を持つ圧電素子を電圧によっ て制御することにより,超精密位置決めを可 能としている. しかし,摩擦力を介して圧電素子の変位を ステージに伝えるため,駆動中には必ずモー タとステージの接触面において摩耗による発 塵が起こる.そのため駆動中における時間位 置誤差が変化するものと考えられる. 本実験においては,駆動中に変化するパラ メータとして,目標位置と実際の位置との差 である時間位置誤差に注目した. 最終的な目 標は,変化する接触面などに対して制御側で 最適な駆動状態を極力維持すると共に最適な 制御パラメータの変化からモータとステージ の接触部の状態を把握し予兆予測をすること である. 3.2 連続往復移動による影響 図 5 は,10mm の区間を 1mm/s で 300 回 往復移動させた後の時間位置誤差の変化の様 子である.この時の PID 定数は、図 4 で最適 とした値で固定して実験を行った. 図に示すとおり,最大約 3μm の時間位置 誤差が発生している.また図 6 は,等速領域 における時間位置誤差の総量を往復回数別に 示したものである.連続往復移動の量が多く なるに従って,総量が増加していることが明 らかである。駆動により発塵の量が増して, その結果時間位置誤差が大きくなったと考え られる.発塵を低減する接触部の材料改良と 共に,時間位置誤差の往復回数に伴う増大に 対応した制御パラメータのリアルタイム最適 化技術の確立が求められている。 4.まとめ 本実験により,制御パラメータの最適化に より時間位置誤差の抑制が可能であること、 またモータの駆動量に応じて時間位置誤差が 大きくなることが確認できた.これらより, 駆動状態に応じて最適な制御パラメータが変 化することが考えられる.逆に、最適な制御 パラメータをモニタリングすることにより, 接触部の状態を把握することが可能となるこ とが予想される. 謝辞 本研究は,科学技術振興事業団熊本地域結集 型共同研究事業の助成により行われたもので ある. position error[nm] 0 1 2 3 4 3 4 time[sec] (a)任意の PID position error[nm] 500 400 300 200 100 0 -100 -200 -300 -400 -500 0 1 2 time[sec] (b)最適な PID 図 4.等速領域における時間位置誤差 4000 3000 position error[nm] 3.1 制御パラメータの最適化 図 4 は,任意に PID の値を設定した際の時 間位置誤差(a)と最適な PID の値に設定した 際の時間位置誤差(b)を比較したものである. (a)においては、最大 450nm の時間位置誤差 が生じているのに対して、(b)においては時間 位置誤差が±100nm 以内に収まっている。こ のように適切な制御パラメータに設定するこ とが,ステージの性能を最大限まで引き出す ことを可能にする.時間位置誤差を小さくし て高精度な駆動を実現するためには適切な PID の定数設定が必要になってくる. 500 400 300 200 100 0 -100 -200 -300 -400 -500 2000 1000 0 -1000 -2000 -3000 -4000 0 2 4 6 8 10 12 time[sec] 図 5.連続往復移動後(往復移動 300 回後) における時間位置誤差 合計時間位置誤差[μm] 3.実験結果 本 実 験 で は , 10mm の 区 間 を 最 高 速 度 1mm/s,加速度 1mm/s2,印加電圧の周波数 は 20kHz という条件で駆動させた際の時間 位置誤差のデータを駆動条件別に取った. 600 500 400 300 200 100 0 0 50 100 150 200 250 300 往復回数 図 6.往復回数別の時間位置誤差の総量 参考文献 [1] Y.Egashira, et al.”Sub-Nanometer Resolution Ultrasonic Motor for Wafer Lithography Precision Stage”,Jpn.J.Appl.Phys.,Vol. 41,pp.5858-5863,2002 問い合わせ 熊本大学 久保田弘 TEL:096-342-3294 e-mail:[email protected]
© Copyright 2026 Paperzz