This article is a technical report without peer review, and its polished and/or extended version may be published elsewhere
第 21 回日本バーチャルリアリティ学会大会論文集(2016 年 9 月)
皮膚水平変位による触感再現のための小型スピーカアレイ
を用いた 1 次元触覚ディスプレイの開発
金子征太郎 1),梶本裕之 1)
1) 電気通信大学
情報理工学部(〒182-8585 東京都調布市 調布ケ丘1丁目5−1, {kaneko,kajimoto}@kaji-lab.jp)
概要:我々はこれまで,テクスチャ面をなぞる際の皮膚の水平変位を高い時間・空間分解能で計測す
るシステムを開発してきた.本稿ではこの計測データを用いて触覚提示を行うための触覚ディスプ
レイについて報告する.直線状の接触子が一次元的に 1mm 間隔で配置され,各接触子がオーディオ
スピーカによって独立に制御される.
キーワード:触覚ディスプレイ,水平皮膚変形,スピーカアレイ
1. はじめに
のである.高い時間分解能と空間分解能を両立させるため
触覚ディスプレイの開発にあたり,現実と同等の触覚を
のスピーカアレイとアルミ板を用いた触覚ディスプレイ
想起させるために,指表面の変位とそれによって想起され
について報告し,さらに作成したデバイスの性能評価の結
る触覚の関係を明らかにすることは重要である.
果について論じる.
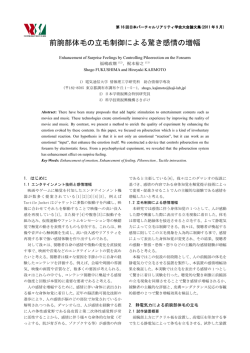
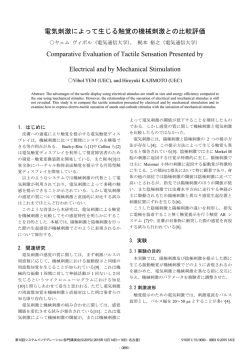
このためには次の 2 つのステップが必要であると考えら
れる.(図 1)第一のステップは,様々な対象に触れた時
2. 関連研究
の皮膚表面変位を記録し,その時空間的特徴と主観的体験
触覚的テクスチャ感を再現させるために,様々な手法
(ザラザラ,ツルツル)との関係を明らかにすることであ
を用いた触覚ディスプレイが研究されている.ここでは
る.第二のステップは,記録された皮膚表面変位ないしそ
特に皮膚の水平変位に関連した触覚ディスプレイについ
の時空間的特徴を再現し,同等の主観的体験が得られるこ
て述べる.
とを確認することである.
皮膚水平変位に関しては,摩擦の制御による触覚呈示
手法が提案されている.ディスプレイ面の超音波振動を
制御する手法 [2] [3],指と接触対象の静電気力を制御す
る手法 [4]が知られている.ただしこれらの手法はあくま
で接触面全体の摩擦を変化させるもので,皮膚表面変位を
高い空間分解能で再現するものではない.
Pasqueto ら [5]や Wang ら [6] [7]はピエゾアクチュエー
タを利用して指表面皮膚の水平変形を生じさせるデバイ
スを開発している.このデバイスは空間的に分布を持つ皮
図 1 研究の流れ
我々は第一のステップに関して,テクスチャ面に対して
膚変位を生じさせることが可能となっている.これを用い
ることで,皮膚水平変位でありながら凹凸感を生じさせ,
指をなぞった際の皮膚表面変位の水平方向成分を高い時
点字や図形の表現を行うことを可能としている.しかし現
間分解能で計測する手法の提案を行った [1].実現した計
時点ではバンド幅が 100Hz と限られており,我々の目的で
測システムは予備的な段階であるが,テクスチャ面をなぞ
ある,テクスチャ面で計測した指表面皮膚変位を再現する
った際の指表面変位を,1mm 間隔,数百 Hz で計測できる
のは難しいと考えられる.
ことを確認した.
本稿は第二のステップ,すなわち記録した皮膚表面変位
を実際に再現するためのハードウェアの検討に関するも
3. デバイス概要
我々は十分に広いバンド幅(パチニ小体の共振周波数が
250Hz 程度であるので同程度以上)と高い空間解像度(人
Seitaro Kaneko and Hiroyuki Kajimoto
の指先の二点弁別閾が 1.5mm であるので [8]より細かい解
像度.なお計測は 1.0mm で行っているため同じ間隔であ
ることが望ましい)を実現するために次のような妥協策を
とった.2次元マトリクスでの配置は考えず 1 次元アレイ
とし,また動きをアレイの列方向に限定することで,比較
的大きなアクチュエータでも高密度に配置できるように
した.
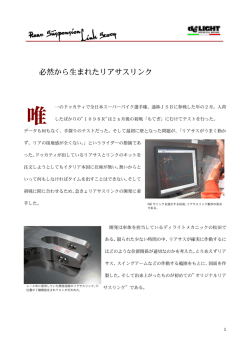
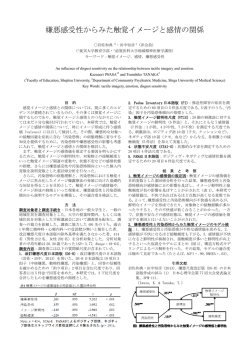
図 2 に我々が作成したデバイスを示す.本デバイスは,
スピーカに対してアルミ板を接着させ,それらを 1mm 間
隔で並べることにより,アルミ板の厚み方向の皮膚変位
を発生させることができる.スピーカを採用したことに
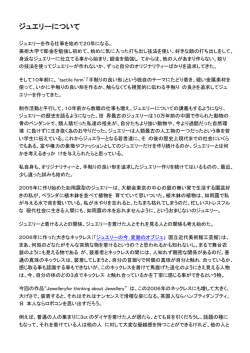
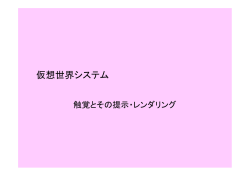
図 5 ユニット後面
より,ピエゾ振動等と比較して幅広い周波数応答を実現
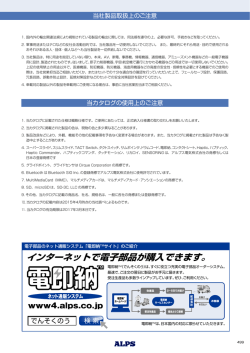
アルミ板の厚みは 0.5mm,間隔は 1.0mm である.ユニ
する.
ットとして,7 つのスピーカの組み合わせで 4 つの板を駆
動させる.そのユニットを 2 つ組み合わせ,全体で 8 枚の
アルミ板から構成される.このデバイスはパソコンから音
声信号を入力することによって駆動される.
パソコンからオーディオインターフェース(OCTACAPTURE UA-1010,RORAND)を用いて 8ch 独立の信号
を出力し,オーディオアンプ(SMSL-SA60)を介して各ス
ピーカを駆動する.
4. デバイス性能調査実験
図 2 デバイス全景
作成したデバイスの周波数特性を計測する実験を行っ
た.
4.1 計測手法
実験の様子を図 6 に示す.台座にアルミ板一枚分を固
定し,台座自体も振動によって動かないようネジ,テープ
で固定した.その後 10,20,40,80,160,320,640,1280Hz,
の正弦波をスピーカに対して入力した.その際,3 種類の
板の指を載せた場合と載せない場合について板の変位を
レーザー変位計(LK-G5000V,KEYENCE)を用いて計測
した.計測のサンプリングレートは 10kHz であった.
図 3 デバイス上面
今回の計測は PC,オーディオインターフェース,アン
デバイスの詳細を図 4,図 5 に示す.各アルミ板はア
プを一体とした系の周波数特性を調べることが目的であ
クリル板に最も近い板を除いてすべて 2 つのスピーカ
ったため,PC,オーディオインターフェース,アンプの出
(AURA SOUND NSW1-205-8A)に対して接着されている.
力振幅を一定にしたうえで計測を行った.PC の音量は最
中心のスピーカを除き,中心点に対称なスピーカとペア
大,オーディオインターフェース,アンプの音量は半分に
になって一枚の板を駆動している.板は正方形,長方形,
固 定 し て 計 測 を 行 っ た . 出 力 波 形 は Audacity
斜め形の 3 形状である.
( http://www.audacityteam.org)を用いて作成した.
図 6 実験概要図
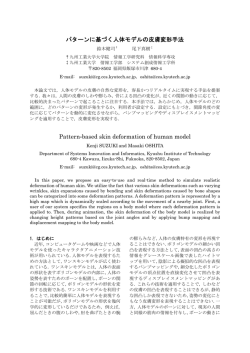
4.2 計測結果
図 7 に計測結果例の例を示す.斜め板に対して各周波
図 4 ユニット前面
数を入力した際の出力波形に対してスペクトルを計算し
4.3 考察
たものである.
出力のパワースペクトルに関しては,離散フーリエ変
0.09
0.08
換の影響で完全に単一の周波数を示してはいないものの,
0.07
0.06
10Hz
振幅(mm)
40Hz
0.04
80Hz
160Hz
0.03
320Hz
0.02
640Hz
1280Hz
0.01
0
-0.01 1
ほぼ入力の周波数が出力されていることがわかる.640Hz
20HZ
0.05
10
100
以上の周波数において振幅が小さくなっているが,これ
は,スピーカーによってアルミ板という重量物を駆動す
るため,高周波において振動が減衰してしまったためで
はないかと考えられる.また,各入力周波数において高
1000
周波数(Hz)
調波が若干発生しており,波形が歪んだものと考えられ
図 7 斜め板フーリエ変換結果
るが,規定周波数における振幅の 1/16 程度に抑えられて
いることがわかる.
図 8,図 9,図 10 に,各板で指をのせた場合と載せな
い場合の,各周波数における振幅を示す.
いることがわかる.逆にいえば指をのせることによる影
0.12
響は装置が動かなくなるほどではなく,また強い周波数
0.1
振幅(mm)
各板に対して指を置いた時と置かない時で比較すると,
指を置いた時に出力振幅が全体的に 8 割程度に低減して
依存性は見られないことから十分補正可能であるといえ
0.08
る.
0.06
また,特に長方形板に 320Hz において非常に振幅が大
0.04
きくなっていることがわかる.こうした特性は板ごとに
0.02
異なっていることから,今後,このデバイスを使用して
0
10
100
1000
周波数(Hz)
正方形板/指なし
いくにあたり,各板の周波数特性の逆関数を入力信号に
フィルタとしてかける必要性があると考えられる.
正方形板/指あり
5. おわりに
図 8 正方形板に関する周波数特性
今回我々は,記録した皮膚表面変位ないしその時空間
的特徴量を再現するため開発したデバイスについて報告
0.12
した.本デバイスは,スピーカに対してアルミ板を接着
振幅(mm)
0.1
させ,それらを 1mm 間隔で並べたものである.周波数応
0.08
答を計測した結果,ピエゾ振動子を用いた先行研究に比べ
0.06
広い周波数応答を実現する事ができたことがわかった.ま
0.04
た,デバイス内の各板に周波数特性の違いがあることがわ
0.02
かった.使用する際にはこの特性を踏まえ,入力波形に
0
10
100
1000
周波数(Hz)
長方形板/指なし
対してフィルタをかける必要がある.
今後はこのデバイスを利用して,我々が前回提案した
長方形板/指あり
記録系で記録した各テクスチャでの皮膚変形を再現し,
図 9 長方形板に関する周波数特性
主観的にそれらのテクスチャ面を識別できるかどうかの
実験を行う.
0.12
謝辞
振幅(mm)
0.1
本研究は JSPS 科研費 15H05923(新学術領域研究
「多元質感知」)の助成を受けたものです。
0.08
0.06
参照文献
0.04
0.02
0
10
100
1000
周波数(Hz)
斜め板/指なし
斜め板/指あり
図 10 斜め板に関する周波数特性
[1] Seitaro Kaneko and Hiroyuki Kajimoto, "Method of
Observing Finger Skin Displacement on a Textured Surface
Using Index Matching," in Haptics: Perception, Devices,
Control, and Applications: 10th International Conference,
EuroHaptics 2016, London, UK, July 4-7, 2016,
Proceedings, Part II.: Springer International Publishing,
2016, pp. 147-155.
[2] Biet M, Giraud F, and Lemaire-Semail B, "Squeeze film
effect for the design of an ultrasonic tactile plate.," IEEE
Trans Ultrason Ferroelectr Freq Control, vol. 12, no. 54,
pp. 2678-2688, Nov. 2007.
[3] L. Winfield, J. Glassmire, J. E. Colgate, and M. Peshkin, "TPaD: Tactile Pattern Display through Variable Friction
Reduction," in Second Joint EuroHaptics Conference and
Symposium on Haptic Interfaces for Virtual Environment
and Teleoperator Systems (WHC'07)., 2007, pp. 421-426.
[4] Ivan Poupyrev, Ali Israr, Chris Harrison Olivier Bau,
"TeslaTouch: electrovibration for touch surfaces," In Proc.
Of 23nd annual ACM symposium on User interface
software and technology (UIST '10), New York, USA, pp.
283-292., 2010
[5] Jerome Pasquero, Vincent Levesque, Vincent Hayward, and
Maryse Legault, "Display of Virtual Braille Dots by Lateral
Skin Deformation: A Pilot Study," In Proc. Of Eurohaptics
2004, Munich Gernany, pp. 96-103., 2004
[6] Qi Wang and V. Hayward, "Compact, Portable, Modular,
High-performance, Distributed Tactile Transducer Device
Based on Lateral Skin Deformation," In Proc. Of 2006 14th
Symposium on Haptic Interfaces for Virtual Environment
and Teleoperator Systems., 2006
[7] V. Levesque, J. Pasquero , and V. Hayward, "Braille Display
by Lateral Skin Deformation with the STReSS2 Tactile
Transducer," in Second Joint EuroHaptics Conference and
Symposium on Haptic Interfaces for Virtual Environment
and Teleoperator Systems (WHC'07). Tukuba, 2007, pp.
115-120.
[8] 大山 正, 今井 省吾, and 和気 典二, 新編 感覚・
知覚ハンドブック. 日本: 誠信書房, 1994.
© Copyright 2026 Paperzz