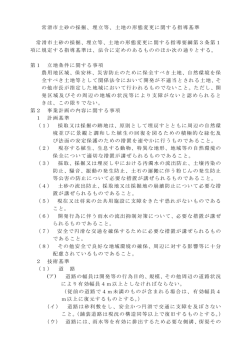
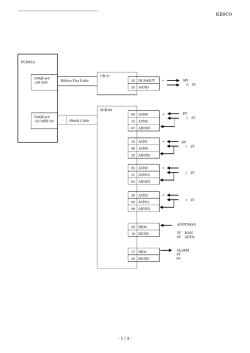
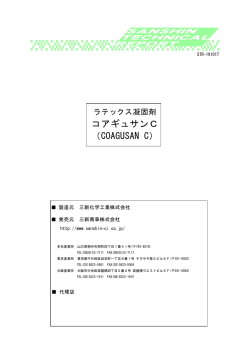
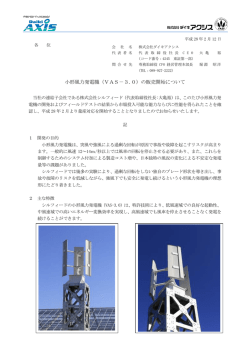
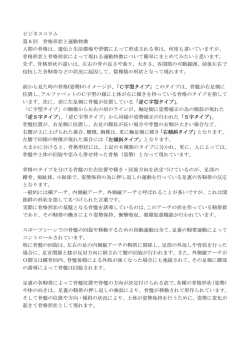
7 制御器設計 これまでは,制御対象あるいはフィードバック制御系の解析方法について議論し てきましたが,それらの結果を復習しながら,本章ではフィードバック制御系の 設計方法について考えてみたいと思います。具体的な制御対象として,遠心調速 器を取り上げます。これは J.Watt の蒸気機関にも利用されており,制御工学の 発端ともいえる装置です。 7.1 遠心調速器 図 7.1: 遠心調速器 図 7.1 が遠心調速器の概略図です。 最初に,動作原理を説明しておきます。遠心調速器は,蒸気機関の回転数に比例して回転する軸 を中央にもちます。また,2 つの球がレバーを通して設置されており,中央の軸の回転数に対応し てそれらに遠心力が作用します。球に作用する遠心力と重力がつりあう状態が平衡状態となりま す。今,図に示す位置がその平衡状態であるとします。これに対して,蒸気機関に接続されている 負荷が増加したとしましょう。それによって回転数が落ちるので,球に作用する遠心力が小さくな り,球が下がます (図中の矢印を参照)。そうすると,リンク機構を通して蒸気機関に送り込む蒸気 の量を調節する蒸気弁が開くため,より多くの蒸気が投入されることとなり,負荷による回転数の 低減が補償されます。つまり,遠心調速器はセンサであり,かつアクチュエータであるわけです。 遠心調速器の制御器としての性能は,球の下がった量に対する蒸気弁の開度に依存していることは 明らかですね。本章では,この制御問題を考えます。 制御器を設計する場合,制御対象の特性を表現する何らかのモデルが必要になることが多くあり ます。導出に関する詳細については省略しますが,本章では,遠心調速器の運動方程式が – 7.1 – φ̈ = − 149 4 φ − 15φ̇ + 3ω ω̇ = −5φ + 10u (7.1) のように与えられると仮定します。ここで,φ は鉛直下方に対する球の角度 (これが観測量です), ω は遠心調速器の回転数,u は操作量です。 遠心調速器では,回転する軸の角度は議論の対象外ですので,角速度 ω に関して 1 階の微分方 程式となっています。 7.2 開ループ特性 まず,伝達関数 P (s) を求めてみることにします。時間関数の微分に関して次式の関係があるこ とに注意してください。 £[ω̇] = sΩ(s) − ω(0), £[φ̈] = s2 Φ(s) − sφ(0) − φ̇(0) 伝達関数は,すべての初期条件を 0 としたときの入力 U (s) = £[u(t)] と出力 Y (s) = £[y(t)] の 比で与えられます。前節の運動方程式に対して伝達関数 P (s) を計算すると,簡単な計算から次式 が得られます。 P (s) = 120 4s3 + 60s2 + 149s + 60 (7.2) 制御対象の時間応答は極 (特性方程式の根) を調べることである程度推察できます。伝達関数の 分母多項式が特性多項式であり,次式に示すように因数分解できます。 4s3 + 60s2 + 149s + 60 = (s + 12)(2s + 5)(2s + 1) = 0 したがって,極は −12, −2.5, −0.5 となります。すべてが負の実数ですので,本制御対象は安定で あることがわかります。しかし,(安定限界である) 虚軸に最も近い極が −0.5 であるので,あまり 応答は速くないことが予想されます。それを確かめるために,インパルス応答を描いたのが図 7.2 です。これは,ちょうど蒸気機関にインパルス状の負荷外乱が作用した場合に対応していると考え ればよいでしょう。外乱が作用してからもとの状態に戻るまでに約 10 秒必要であることがわかり ます。これで十分なのかどうかは特定できませんが,ここではこの応答は遅いものと考えます。 7.3 比例制御 それでは,応答特性の改善を目指して,最も簡単な比例制御系の構成を検討します。 比例制御器は u = KP (r − y) (U (s) = KP (R(s) − Y (s)) (7.3) で与えられます。ここで,定数 KP は比例ゲインで,設計者が定めるべきものです。また,r は目 標入力です。この制御器は,大きい誤差 r − y には大きい操作量,小さい誤差には小さい操作量, という最も単純な考えに基づいています。 式 (7.3) を利用してフィードバック制御系を構成したときの閉ループ伝達関数 Gcl (s) が – 7.2 – Impulse Response From: U(1) 0.7 0.6 0.5 To: Y(1) Amplitude 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 6 7 8 9 10 Time (sec.) 図 7.2: 制御対象に対するインパルス応答 Gcl = KP P (s) 1 + KP P (s) で与えられることから,特性方程式 (1 + KP P (s) = 0) は次式となります。 4s3 + 60s2 + 149s + 60 + 120KP = 0 (7.4) 制御器の設計を行う場合,閉ループ系の安定性を保証することが必須条件ですので,それを満たす 比例ゲイン KP の範囲を調べます。ここでは,Hurwitz の安定判別法を適用してみましょう。式 (7.4) に対する Hurwitz 行列は 60 60 + 120KP 149 4 0 60 0 0 60 + 120KP で与えられるので,安定条件は 870 ≈ 18.1 (7.5) 48 で与えられます (厳密には KP > −0.5 であればよいのですが,ここでは KP を正の実数としてい 0 < KP < ます)。 同様のことをゲイン余裕と位相余裕の立場から見てみます。そのために,一巡伝達関数の BODE 線図を描いてみます (図 7.3)。なお,比例制御が対象ですので,制御対象そのものが一巡伝達関数 であることに注意してください。 これより,ゲイン余裕 Gm と位相余裕 Pm はそれぞれ Gm = 25.2[dB] (6.1[rad/s]), Pm = 100.0[deg] (0.807[rad/s]) – 7.3 – Bode Diagrams Gm=25.166 dB (at 6.1033 rad/sec), Pm=100.03 deg. (at 0.80717 rad/sec) 20 0 -20 -40 Phase (deg); Magnitude (dB) -60 -80 -100 0 -50 -100 -150 -200 -250 -300 10 -1 10 0 10 1 10 2 Frequency (rad/sec) 図 7.3: BODE 線図 で与えられます。前述した Hurwitz の安定判別法によって得られたゲイン KP の上限 (KP = 18.1) を [dB] で表すと,当然のことですが Gm と一致します。 本制御対象は,次数差 (分母多項式の次数と分子多項式の次数の差) が 3 です。したがって,位 相特性は −180[deg] を必ず横切るので,ゲイン KP を大きくすると必ず閉ループシステムは不安 定となります。 さらに,根軌跡法の立場から検討します。本システムに対する根軌跡は図 7.4 となります。実軸 上の 3 つの×が開ループ極です。根軌跡が虚軸を横切る点が KP = 18.1 であり,そのときの虚部 の値が 6.1 であることに注意してください。 15 10 Imag Axis 5 0 -5 -10 -15 -16 -14 -12 -10 -8 -6 -4 Real Axis 図 7.4: 根軌跡 – 7.4 – -2 0 2 4 それでは,0 ∼ 18.1 の範囲の中で望ましい比例ゲイン KP はどのようにして定めればよいので しょうか。実際には,あらかじめ定められた複数の設計仕様を満たすように与えるべきですが,こ こでは,応答性の立場から考えます。望ましい時間応答をもつシステムの極の目安は,極の実部 の絶対値が虚部の絶対値に等しいかまたは小さいこと,を第 4 日目にお話しました。そこで,こ こでは 1 対の複素共役極の実部と虚部の絶対値が等しくなるように比例ゲイン KP を求めてみま しょう。 この場合,閉ループ特性方程式は次式となる必要があります (a, b は正の実数)。 (s + a + aj)(s + a − aj)(s + b) = s3 + (2a + b)s2 + 2a(a + b)s + 2a2 b = 0 (7.6) 上式と式 (7.4) との係数比較から a = 1.37, b = 12.26, KP = 1.034 を得ます。このとき,閉ループ極は −12.27, −1.37 ± 1.37 となります。また,インパルス応答を図 7.5 に示します (図中,点線は開ループシステムの応答)。 応答が改善されていることがおわかりいただけると思います。 0.7 0.6 0.5 Resp. 0.4 0.3 0.2 0.1 0 -0.1 0 1 2 3 4 5 6 7 8 9 10 time[sec] 図 7.5: 比例制御系に対するインパルス応答 7.4 PD 制御 根軌跡は比例ゲイン KP に対する閉ループ極の軌跡を描いたものです。これは見方を変えると, 軌跡以外の地点に極をもっていくことはできないことを意味しています。比例制御は構成は簡単で すが,このような問題点も持ちます。そこで,制御器のもつ自由度を増やすことを考えます。 比例制御では,観測量だけを使用しましたが,その微分をとることで,より多くのシステムのも つ情報を手に入れることが可能となります。そこで,次式に示す制御器を考えます。 – 7.5 – u = KP (r − y) + KD (ṙ − ẏ) (U (s) = (KP + KD s)(R(s) − Y (s)) (7.7) この制御器は,比例 (Proportional) と微分 (Derivative) から構成されているので,PD 制御器と呼 びます。この場合,設計者が定めるべきものは KP , KD の 2 つとなります。前者を比例ゲイン, 後者を微分ゲインと呼びます。なお,式 (7.7) ではなく u = KP (r − y) − KD ẏ (U (s) = KP (R(s) − Y (s)) − KD sY (s)) (7.8) として利用されることもあります。両者の相違点は ṙ を含むかどうかです。式 (7.7) の場合,目標 入力がステップ関数のように急激に変化する特性をもつとき,一時的ですが大きな操作量が発生す ることがあります。式 (7.7) と式 (7.8) の制御器をブロック線図で表現したのが図 7.6 です。後者 が (a) で,前者が (b) です。微分器の入り方から,前者を微分先行型 PD 制御といいます。 + - + KP - P(s) KD s (a) + - KP +KDs P(s) (b) 図 7.6: PD 制御系 P 制御のときと同様に,最初に,閉ループシステムの安定性について検討します。 この場合,特性方程式は 4s3 + 60s2 + (149 + 120KD )s + (60 + 120KP ) = 0 (7.9) で与えられます (なお,特性方程式は式 (7.7) と式 (7.8) に対して同じ)。これに対して Hurwitz の 安定判別法を適用すると, 720 870 KD + (7.10) 48 48 によって閉ループシステムが安定となる比例ゲイン KP 0 < KP < が得られます。上式より,微分ゲイン KD の範囲を広げることが可能であることがわかります。たとえば,KD = 1 とすると安定限界ゲイン は 18.1 から 33.1 となります。比例ゲイン KP を大きくできるということは,それだけ高い応答 性を期待できます。もし,特性方程式 (7.9) が式 (7.6) の構造をもつように KP を定めると KP = 4.273 – 7.6 – となります。前節の KP = 1.034 と比較してより大きい値です。このときのインパルス応答は図 7.7 となりますが,より速い応答が得られていることがわかると思います。ただし,周波数特性の ところでもお話したように,微分器は周波数が高くなるほどゲインが大きくなりますので,システ ムに入り込む外乱には十分注意して KD を選定する必要があります。 0.7 0.6 0.5 Resp. 0.4 0.3 0.2 0.1 0 -0.1 0 1 2 3 4 5 6 7 8 9 10 time[sec] 図 7.7: PD 制御系に対するインパルス応答 ところで,式 (7.4) では,閉ループ特性方程式の s0 の項だけに制御器のパラメータ (比例ゲイン KP ) が入っていたのに対して,式 (7.9) では s0 , s1 に独立にパラメータ (比例ゲイン KP と微分 ゲイン KD ) が入り込みます。ということは, u = KP (r − y) + KD (ṙ − ẏ) + KD2 (r̈ − ÿ) (7.11) とすれば,閉ループ特性多項式の (最高次を除く) すべての係数に制御器のパラメータを入れるこ とが可能であることが予想できますし,またその予想が正しいことを示すことができます。この場 合,任意の地点に閉ループ極を配置することが可能となります。このような制御器を P D2 制御器 と呼びます。なお,この制御器を実装するには,高階の微分が必要となるので,十分に注意しなけ ればなりません。 7.5 PID 制御 前節までは,インパルス応答を調べてきましたが,次にステップ応答を検討します。 前述した比例ゲイン KP = 1.034 をもつ比例制御系に単位ステップ目標入力を与えたときの応 答を示したのが図 7.8 です。 応答において注目すべき点は,目標入力が 1 であるのに対して,出力が 1 になっていないとい うことです。このように比例制御系では定常偏差が残る場合があります (PD 制御の場合も同様)。 単位ステップ目標入力をラプラス変換すると R(s) = 1 s – 7.7 – Step Response From: U(1) 0.7 0.6 0.5 To: Y(1) Amplitude 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 6 7 8 9 10 Time (sec.) 図 7.8: 比例制御系に対する単位ステップ応答 ですので,定常偏差が生じないためには,一巡伝達関数が 1/s をもつ必要があります。しかし,こ こで対象としている遠心調速器はそれをもちません。したがって,制御器が 1/s,すなわち,積分 特性をもつ必要が出てきます。つまり u = KP (r − y) + KD (ṙ − ẏ) + 1 TI (r − y) dt (7.12) あるいは,伝達関数で表現すると, U (s) = (KP + KD s + 1 )(R(s) − Y (s)) TI s です。これを PID 制御器 (I は integral の頭文字) と呼び,古典制御における基本的な制御器の構 造の一つです。式中 TI をその単位から積分時間と呼びます。実際には,微分項を含まない u = KP (r − y) + 1 TI (r − y) dt (7.13) もよく使用されます。これを PI 制御器と呼びます。 PID 制御器は定めるべきパラメータを 3 つもちます。これらの決定法については次節で改めて 述べることにして,ここでは,これらを KP = 10.9, TI = 0.25, KD = 2.24 (7.14) と選んだとします。このときの単位ステップ応答を図 7.9 に示します。定常偏差なくステップ目標 値に追従していることがわかると思います。 7.6 P,PD,PID 制御器設計法 前節までに紹介した P 制御,PI 制御,PID 制御に関して,これまでに多くのパラメータ調整法 が提案されています。たとえば, – 7.8 – Step Response From: U(1) 1.4 1.2 1 To: Y(1) Amplitude 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time (sec.) 図 7.9: PID 制御系に対する単位ステップ応答 須田 (著者代表):PID 制御,システム制御情報学会編,コロナ社 に詳細に紹介されていますので,興味ある人は参考にしてください。ここでは,それらの一つで ある限界感度法を紹介することにします。この方法は,制御対象のモデルを必要としないものであ り,実際によく使用されるものです。なお,限界感度法で得られる制御器パラメータ (比例ゲイン, 微分ゲイン,積分時間) があらゆる対象に対して必ずしも最適ではないことに注意してください。 これを初期点として,微調整をしてはじめて望ましい制御器パラメータを得ることができます。 限界感度法は,比例制御系 (KD = 0, TI = ∞) を構成した上で,比例ゲイン KP を大きくして いきます。一般的には,比例ゲインがある値以上になると発振現象が発生し始めます。そのときの ゲインと発振周期を Ku (限界ゲイン),Tu とします。これらはモデルがなくても実験的に得ること ができる点に注意してください。このとき制御器パラメータは次表のように与えられます。 KP TI KD P 0.5Ku ∞ 0 PI 0.4Ku 0.8Tu /Ku 0 P ID 0.6Ku 0.5Tu /Ku 0.12Tu Ku それでは,この限界感度法を遠心調速器に対して適用してみましょう。今の場合,モデル (伝達 関数) が得られていますので,それに対して設計を行います。 まず,比例制御系を構成したときの限界ゲインですが,Hurwitz の安定判別法あるいはゲイン余 裕あるいは根軌跡法から Ku = 18.1 です。また,そのときの発振周波数が 6.1[rad/s] であること から Tu = 1.03[sec] となります。したがって,PID 制御器を構成する場合の制御器パラメータは KP = 10.9, TI = 0.0285, KD = 2.24 となります。しかし,このままの値ではステップ応答が振動的となるので,積分時間 TI を調整し た結果が式 (7.14) なのです。 – 7.9 –
© Copyright 2026 Paperzz