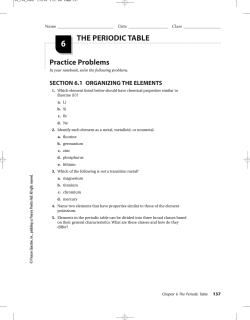
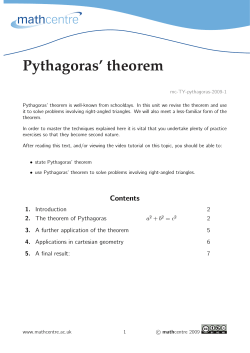
Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 RESEARCH Open Access Dynamics of a nonautonomous Lotka-Volterra predator-prey dispersal system with impulsive effects Lijun Xu1 and Wenquan Wu2* * Correspondence: [email protected] 2 Department of Mathematics, Aba Teachers College, Wenchuan, Sichuan 623002, China Full list of author information is available at the end of the article Abstract By applying the comparison theorem, Lyapunov functional, and almost periodic functional hull theory of the impulsive differential equations, this paper gives some new sufficient conditions for the uniform persistence, global asymptotical stability, and almost periodic solution to a nonautonomous Lotka-Volterra predator-prey dispersal system with impulsive effects. The main results of this paper extend some corresponding results obtained in recent years. The method used in this paper provides a possible method to study the uniform persistence, global asymptotical stability, and almost periodic solution of the models with impulsive perturbations in biological populations. MSC: 34K14; 34K20; 34K45; 92D25 Keywords: uniform persistence; diffusion; comparison theorem; predator-prey; impulse 1 Introduction Because of the ecological effects of human activities and industry, more and more habitats are broken into patches and some of them are polluted. Negative feedback crowding or the effect of the past life history of the species on its present birth rate are common examples illustrating the biological meaning of time delays and justifying their use in these systems. Recently, diffusions have been introduced into Lotka-Volterra type systems. The effect of an environment change in the growth and diffusion of a species in a heterogeneous habitat is a subject of considerable interest in the ecological literature [–�]. As was pointed out by Berryman [], the dynamic relationship between predators and their prey has long been and will continue to be one of the dominant themes in both ecology and mathematical ecology due to its universal existence and importance. In recent years, the predator-prey system has been extensively studied by many scholars, many excellent results were obtained concerned with the persistent property and positive periodic solution of the system; see [–�] and the references cited therein. Considering the effect of almost periodically varying environment is an important selective forces on systems in a fluctuating environment, Meng and Chen [�] studied the case of combined effects: dispersion, time delays, almost periodicity of the environment. Namely, they investigated the following general nonautonomous Lotka-Volterra ©2014 Xu and Wu; licensee Springer. This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 2 of 23 type predator-prey dispersal system: ⎧ x˙  (t) = x (t)[r (t) – a (t)x (t) – b (t)x (t – τ (t)) ⎪ ⎪ ⎪ � c(t)y(t) ⎪ ⎪ – –σ k (t, s)x (t + s) ds – +α(t)x ] + ni=� Di (t)[xi (t) – x (t)], ⎪ ⎪  (t) ⎪ ⎨ x˙ (t) = x (t)[r (t) – a (t)x (t) – b (t)x (t – τ (t)) i i i i i i i i � n ⎪ – –σi ki (t, s)xi (t + s) ds] + j= Dji (t)[xj (t) – xi (t)], i = �, �, . . . , n, ⎪ ⎪ ⎪ f (t)x (t) ⎪ ⎪ ˙ y (t) = y(t)[–r n+ (t) + +α(t)x (t) – an+ (t)y(t) – bn+ (t)y(t – τn+ (t)) ⎪ ⎪ ⎩ � – –σn+ kn+ (t, s)y(t + s) ds]. (.) By using the comparison theorem and functional hull theory of almost periodic system, the authors [�] obtained some sufficient conditions for the uniform persistence, global asymptotical stability, and almost periodic solution to system (.). However, the ecological system is often deeply perturbed by human exploitation activities such as planting and harvesting and so on, which makes it unsuitable to be considered continually. To obtain a more accurate description of such systems, we need to consider impulsive differential equations. In recent years, the impulsive differential equations have been intensively investigated (see [�–�] for more details). To the best of the authors’ knowledge, in the literature, there are few papers concerning the permanence, global asymptotical stability, and almost periodic solution to the Lotka-Volterra type predatorprey dispersal system with impulsive effects. Therefore, we consider the following LotkaVolterra type predator-prey dispersal system with impulsive effects: ⎧ x˙  (t) = x (t)[r (t) – a (t)x (t) – b (t)x (t – τ (t)) ⎪ ⎪ ⎪ � c(t)y(t) ⎪ ⎪ – –σ k (t, s)x (t + s) ds – +α(t)x ] + ni=� Di (t)[xi (t) – x (t)], ⎪ ⎪  (t) ⎪ ⎪ ⎪ x˙ i (t) = xi (t)[ri (t) – ai (t)xi (t) – bi (t)xi (t – τi (t)) ⎪ ⎪ ⎪ � ⎨ – –σi ki (t, s)xi (t + s) ds] + nj= Dji (t)[xj (t) – xi (t)], i = �, �, . . . , n, f (t)x (t) ⎪ – an+ (t)y(t) – bn+ (t)y(t – τn+ (t)) y˙ (t) = y(t)[–rn+ (t) + +α(t)x ⎪ ⎪  (t) ⎪ � ⎪ ⎪ k (t, s)y(t + s) ds], t = tk , – ⎪ –σn+ n+ ⎪ ⎪ ⎪ ⎪ xj (tk ) = hjk xj (tk ), j = , �, . . . , n, ⎪ ⎪ ⎩ y(tk ) = hn+,k y(tk ), k ∈ Z, (.�) where x and y are population density of prey species x and predator species y in patch , and xi is density of prey species x in patch i; predator species y is confined to patch , while the prey species x can disperse among n patches; Dij (t) is the dispersion rate of the species from patch j to patch i, the terms bi (t)xi (t – τi (t)) (i = , �, . . . , n), bn+ (t)y(t – τn+ (t)), � � –σi ki (t, s)xi (t + s) ds (i = , �, . . . , n) and –σn+ kn+ (t, s)y(t + s) ds represent the negative feedback crowding and the effect of all the past life history of the species on its present birth rate, respectively; xi (tk ) = xi (tk+ ) – xi (tk– ), xi (tk+ ) and xi (tk– ) represent the right and the left limit of xi (tk ), xi (tk– ) = xi (tk ), k ∈ Z, i = , �, . . . , n. Related to a continuous function f , we use the following notations: f l = infs∈R f (s), f u = sups∈R f (s). In system (.�), we always assume that for all i = , �, . . . , n + , j = , �, . . . , n: (H ) ri (t), ai (t), bi (t), c(t), f (t), α(t) and Dij (t) (Dii (t) = �) are nonnegative and continuous almost periodic functions for all t ∈ R, and ali + bli > �. (H� ) ki (t, s) are defined on R × (–∞, �] and nonnegative and continuous almost periodic functions with respect to t ∈ R and integrable with respect to s on (–∞, �] such that Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 3 of 23 � –σi � ki (t, s) ds is continuous and bounded with respect to t ∈ R, � < –σi (–s)kiu (s) ds < +∞. (H� ) τi (t) is continuous and differentiable bounded almost periodic functions on R, and inft∈R { – τ˙i (t)} > �. (H� ) The sequences {hik } are almost periodic and hik > –. j j (H� ) The set of sequences {tk }, tk = tk+j – tk , k ∈ Z, j ∈ Z is uniformly almost periodic and θ := infk∈Z tk > �. The main purpose of this paper is to establish some new sufficient conditions which guarantee the uniform persistence, global asymptotical stability, and almost periodic solution of system (.�) by using the comparison theorem, the Lyapunov functional, and almost periodic functional hull theory of the impulsive differential equations [�, ] (see Theorem �., Theorem �., and Theorem �. in Sections �-�). The organization of this paper is as follows. In Section �, we give some basic definitions and necessary lemmas which will be used in later sections. In Section �, by using the comparison theorem of the impulsive differential equations, we give the permanence of system (.�). In Section �, we study the global asymptotical stability of system (.�) by constructing a suitable Lyapunov functional. In Section �, some new sufficient conditions are obtained for the existence, uniqueness, and global asymptotical stability of the positive almost periodic solution of system (.�). 2 Preliminaries Now, let us state the following definitions and lemmas, which will be useful in proving our main result. Let Rn be the n-dimensional Euclidean space with norm x = ni= |xi |. By I, I = {{tk } ∈ R : tk < tk+ , k ∈ Z, limk→±∞ tk = ±∞}, we denote the set of all sequences that are unbounded and strictly increasing with distance ρ({tk() }, {tk(�) }). Let ⊂ R, = ∅, τ := supt∈R {τi (t) : i = , �, . . . , n}, ξ� ∈ R, introduce the following notations: PC(ξ� ) is the space of all functions φ : [ξ� – τ , ξ� ] → having points of discontinuity at μ , μ� , . . . ∈ [ξ� – τ , ξ� ] of the first kind and being left continuous at these points. For J ⊂ R, PC(J, R) is the space of all piecewise continuous functions from J to R with points of discontinuity of the first kind tk , at which it is left continuous. Let φi , ϕ ∈ PC(�). Denote by xi (t) = xi (t; �, φi ), y(t) = y(t; �, ϕ), xi , y ∈ , i = , �, . . . , n the solution of system (.�) satisfying the initial conditions � ≤ xi (s; �, φi ) = φi (s) < +∞, � ≤ y(s; �, ϕ) = ϕ(s) < +∞, s ∈ [–τ , �], s ∈ [–τ , �], xi (� + �; �, φi ) = φi (�) > �; y(� + �; �, ϕ) = ϕ(�) > �. Remark �. The problems of existence, uniqueness, and continuity of the solutions of impulsive differential equations have been investigated by many authors. Efficient sufficient conditions which guarantee the existence of the solutions of such systems are given in [�, ]. Since the solution of system (.�) is a piecewise continuous function with points of discontinuity of the first kind tk , k ∈ Z we adopt the following definitions for almost periodicity. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 4 of 23 Let T, P ∈ I, s(T ∪ P) : I → I be a map such that the set s(T ∪ P) forms a strictly increasing sequence and if D ⊂ R and > �, θ (D) = {t + : t ∈ D}, F (D) = {θ (D) : > �}. By φ = (ϕ(t), T) we denote the element from the space PC × I, and for every sequence of real numbers {αn } we let θαn φ denote the sets {ϕ(t – αn ), T – αn } ⊂ PC × I, where T – αn = {tk – αn : k ∈ Z, n = , �, . . .}. j j Definition �. ([]) The set of sequences {tk }, tk = tk+j – tk , k ∈ Z, j ∈ Z, {tk } ∈ I is said to be uniformly almost periodic if for arbitrary > � there exists a relatively dense set of -almost periods common for any sequences. Definition �.� ([]) The function ϕ ∈ PC(R, R) is said to be almost periodic, if the following hold: j j () The set of sequences {tk }, tk = tk+j – tk , k ∈ Z, j ∈ Z, {tk } ∈ I is uniformly almost periodic. (�) For any > � there exists a real number δ > � such that if the points t and t belong to one and the same interval of continuity of ϕ(t) and satisfy the inequality |t – t | < δ, then |ϕ(t ) – ϕ(t )| < . (�) For any > � there exists a relatively dense set T such that if η ∈ T, then |ϕ(t + η) – ϕ(t)| < for all t ∈ R satisfying the condition |t – tk | > , k ∈ Z. The elements of T are called -almost periods. j j Lemma �. ([]) The set of sequences {tk }, tk = tk+j – tk , k ∈ Z, j ∈ Z, {tk } ∈ I is uniformly almost periodic if and only if from each infinite sequence of shifts {tk –αn }, k ∈ Z, n = , �, . . . , αn ∈ R, we can choose a subsequence which is convergent in I. Definition �.� ([]) The sequence φn , φn = (ϕn (t), Tn ) ∈ PC × I is uniformly convergent to φ, φ = (ϕ(t), T) ∈ PC × I if and only if for any > � there exists n� > � such that ρ(T, Tn ) < , ϕn (t) – ϕ(t) < hold uniformly for n ≥ n� and t ∈ R \ F (s(Tn ∪ T)). Definition �.� ([]) The function φ ∈ PC is said to be an almost periodic piecewise continuous function with points of discontinuity of the first kind from the set T if for every sequence of real numbers {αm } there exists a subsequence {αn } such that θαn φ is compact in PC × I. Lemma �.� ([]) Let {tk } ∈ I. Then there exists a positive integer A such that on each interval of length , we have no more than A elements of the sequence {tk }, i.e., i(s, t) ≤ A(t – s) + A, where i(s, t) is the number of the points tk in the interval (s, t). Lemma �.� Let {tk } ∈ I. Then i(s, t) ≥ t–s – , θ where i(s, t) is the number of the points tk in the interval (s, t). Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 5 of 23 Proof The proof of this lemma is easy and we omit it. This completes the proof. 3 Uniform persistence In this section, we establish a uniform persistence result for system (.�). Lemma �. ([�]) Assume that x ∈ PC(R) with points of discontinuity at t = tk and is left continuous at t = tk for k ∈ Z+ , and x˙ (t) ≤ f (t, x(t)), t = tk , x(tk+ ) ≤ Ik (x(tk )), k ∈ Z+ , (�.) where f ∈ C(R × R, R), Ik ∈ C(R, R) and Ik (x) is nondecreasing in x for k ∈ Z+ . Let u∗ (t) be the maximal solution of the scalar impulsive differential equation ⎧ ⎪ ˙ = f (t, u(t)), t = tk , ⎨ u(t) u(tk+ ) = Ik (u(tk )) ≥ �, k ∈ Z+ , ⎪ ⎩ + u(t� ) = u� (�.�) existing on [t� , ∞). Then x(t�+ ) ≤ u� implies x(t) ≤ u∗ (t) for t ≥ t� . Remark �. If the inequalities (�.) in Lemma �. is reversed and u∗ (t) is the minimal solution of system (�.�) existing on [t� , ∞), then x(t�+ ) ≥ u� implies x(t) ≥ u∗ (t) for t ≥ t� . Lemma �.� Assume that aθ > ξ l , b > �, hk > –, and x(t) > � is a solution of the following impulsive logistic equation: x˙ (t) = x(t)[a – bx(t)], t = tk , x(tk ) = hk x(tk ), k ∈ Z, (�.�) then l eξ (aθ – ξ l ) , lim sup x(t) ≤ bθ t→+∞ where ξ l := ln infk∈Z  +hk . Proof Let u = x , then system (�.�) changes to du(t) = –au(t) + b, t dt u(tk ) + u(tk ) = +h , k ∈ Z. k = tk , Similar to the proof in [], we can obtain from Lemma �.� t u(t) = W (t, �)u(�) + b W (t, s) ds � = tk ∈[�,t] =  e–at u(�) + b  + hk   + hk t θ – t � t ∈[s,t] k t e–at u(�) + b �  e–a(t–s) ds  + hk   + hk t–s – θ e–a(t–s) ds Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 t ξl l ≥ e–ξ e–(a– θ )t u(�) + b Page 6 of 23 ξl l e–ξ e–(a– θ )(t–s) ds � = ξl l l ξ l e–ξ e–(a– θ )t u(�) + be–ξ [ – e–(a– θ )t ] a– ξl θ , (�.�) where e–a(t–s) , W (t, s) = k+  –a(t–s) , j=m +hj e tk– < s < t < tk ; tm– < s ≤ tm < tk < t ≤ tk+ . Then l lim sup x(t) = lim sup u(t) t→+∞ – t→+∞ eξ (aθ – ξ l ) . bθ ≤ This completes the proof. Lemma �.� Assume that a > ξ u A, b > �, hk > – and x(t) > � is a solution of the following impulsive logistic equation: x˙ (t) = x(t)[a – bx(t)], t = tk , x(tk ) = hk x(tk ), k ∈ Z, (�.�) then lim inf x(t) ≥ t→+∞ a – ξ uA , beξ u A where A is defined as that in Lemma �.�, ξ u := ln supk∈Z  . +hk Proof Let u = x , then system (�.�) changes to du(t) = –au(t) + b, t dt u(tk ) + u(tk ) = +h , k ∈ Z. k = tk , Similar to the proof as that in (�.�), we can obtain from Lemma �.� t W (t, s) ds u(t) = W (t, �)u(�) + b � ≤ tk ∈[�,t] ≤  e–at u(�) + b  + hk   + hk t � t ∈[s,t] k At+A u ≤ eξ A e–(a–ξ t e–at u(�) + b � u A)t t u  e–a(t–s) ds  + hk   + hk eξ A e–(a–ξ u(�) + b A(t–s)+A e–a(t–s) ds u A)(t–s) � u u = eξ A e–(a–ξ u A)t u(�) + beξ A [ – e–(a–ξ a – ξ uA u A)t ] , ds Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 7 of 23 which implies that lim inf x(t) = lim inf u(t) t→+∞ – t→+∞ ≥ a – ξ uA . beξ u A This completes the proof. Lemma �.� Assume that aθ > ξ l and for x(t) > �, we have x˙ (t) ≤ x(t)[a – b� x(t) – b x(t – τ (t))], x(tk ) ≤ hk x(tk ), k ∈ Z, t = tk , (�.�) where a > �, b� , b ≥ �, b� + b > �. Then there exists a positive constant M such that l lim sup x(t) ≤ t→+∞ eξ (aθ – ξ l ) := M, Bθ where B = b� + inft∈R b tk ∈[t–τ (t),t) ( + hk ) – –aτ (t) e . Proof From system (�.�), we have x˙ (t) ≤ ax(t), t = tk , x(tk ) ≤ hk x(tk ), k ∈ Z, is equivalent to d [x(t)e–at ] ≤ �, dt t = tk , x(tk ) ≤ hk x(tk ), k ∈ Z+ . (�.�) For some t ∈ [�, +∞) and t = tk , k ∈ Z+ , consider interval [t – τ (t), t). Assume that t < t� < · · · < tj are the impulse points in [t – τ (t), t). Integrating the first inequality of system (�.�) from t – τ (t) to t leads to x(t )e–at ≤ x t – τ (t) e–a(t–τ (t)) . Integrating the first inequality of system (�.�) from t to t� leads to x(t� )e–at� ≤ x t+ e–at ≤ ( + h )x(t )e–at ≤ ( + h )x t – τ (t) e–a(t–τ (t)) . Repeating the above process, integrating the first inequality of system (�.�) from tj to t leads to x(t)e–at ≤ x tj+ e–atj ≤ ( + hj )x(tj )e–atj ≤ ( + hk )x t – τ (t) e–a(t–τ (t)) . tk ∈[t–τ (t),t) Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 8 of 23 Then x t – τ (t) ≥ ( + hk )– e–aτ (t) x(t). (�.) tk ∈[t–τ (t),t) Substituting (�.) into system (�.�) leads to x˙ (t) ≤ x(t)[a – Bx(t)], t = tk , x(tk ) ≤ hk x(tk ), k ∈ Z. Consider the auxiliary system ⎧ ⎪ ⎨ z˙ (t) = z(t)[a – Bz(t)], t = tk , z(tk+ ) = ( + hk )z(tk ), k ∈ Z, ⎪ ⎩ + z(� ) = x(�+ ). (�.) By Lemma �., x(t) ≤ z(t), where z(t) is the solution of system (�.). By Lemma �.�, we have from (�.) l lim sup x(t) ≤ lim sup z(t) ≤ t→+∞ t→+∞ eξ (aθ – ξ l ) . Bθ This completes the proof. Lemma �.� Assume that a > ξ u A, for x(t) > � and lim supt→+∞ x(t) ≤ M, we have x˙ (t) ≥ x(t)[a – b� x(t) – b x(t – τ (t))], x(tk ) = hk x(tk ), t = tk , (�.�) where a > K + ξ u A, b� , b ≥ �, b := b� + b > �, k ∈ Z. Then there exists a positive constant N such that lim inf x(t) ≥ t→+∞ a – ξ uA := N, Deξ u A where D := b� + sup b t∈R ( + hk )– e–[a–bM]τ (t) . tk ∈[t–τ (t),t) Proof According to the assumption, for ∀  > �, there exists T > � such that x(t) ≤ M +  for t ≥ T . From system (�.�), we have x˙ (t) ≥ [a – b(M +  )]x(t) := L  x(t), x(tk ) = hk x(tk ) + dk , k ∈ Z, t = t k , t ≥ T , Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 9 of 23 is equivalent to d [x(t)e–L  t ] ≥ �, dt t = t k , t ≥ T , x(tk ) = hk x(tk ) + dk , k ∈ Z. (�.) Similar to the arguments in (�.), we obtain x t – τ (t) ≤ ( + hk )– e–L  τ (t) x(t). (�.�) tk ∈[t–τ (t),t) Let ( + hk )– e–[a–b(M+ D  := b� + sup b t∈R  )]τ (t) . tk ∈[t–τ (t),t) Substituting (�.�) into system (�.�) leads to x˙ (t) ≥ x(t)[a – D  x(t)], t = tk , t ≥ T , x(tk ) = hk x(tk ), k ∈ Z. Consider the auxiliary system ⎧ ⎪ ⎨ z˙ (t) = z(t)[a – D  z(t)], t = tk , t ≥ T , z(tk+ ) = ( + hk )z(tk ), k ∈ Z, ⎪ ⎩ z(T+ ) = x(T+ ). (�.�) By Remark �., x(t) ≥ z(t), where z(t) is the solution of system (�.�). By Lemma �.�, we have from (�.�) lim inf x(t) ≥ lim inf z(t) ≥ t→+∞ t→+∞ a – ξ uA . Deξ u A This completes the proof. Let ru := max riu , ≤i≤n ξ l := ln inf k∈Z al := min ali , huk := max hik , ≤i≤n  ,  + huk ≤i≤n l ξn+ := ln inf k∈Z k ∈ Z,  .  + hn+,k Proposition �. Every solution x(t) = (x (t), x� (t), . . . , xn (t), y(t))T of system (.�) satisfies l lim sup xi (t) ≤ Mi := t→∞ eξ (ru θ – ξ l ) , al θ l lim sup y(t) ≤ Mn+ := l ) eξn+ (ryu θ – ξn+ t→∞ if the following condition holds: Bn+ θ , Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 10 of 23 l (H� ) ru θ > ξ l , ryu θ > ξn+ , j = , �, . . . , n, where Bn+ := aln+ + inft∈R bln+ tk ∈[t–τn+ (t),t) ( + hn+,k ) u τ – –rn+ n+ (t) e , ryu := f u M . +α l M Proof Define V (t) = max{x (t), x� (t), . . . , xn (t)} for t ≥ �. For any t � ≥ � and t � = tk , k ∈ Z, there must exist i ∈ {, �, . . . , n} and δ > t � small enough such that V (t � ) = xi (t � ) and xj (s) ≤ xi (s) for ∀s ∈ [t � , δ), j = i, i, j ∈ {, �, . . . , n}. Calculating the upper right derivative of V (t� ) from the positive solution for system (.�), we have D+ V t � = x˙ i t � ≤ xi t � riu – ali xi t � ≤ V t � r u – al V t � . By the arbitrariness of t � , we have D+ V (t) ≤ V (t) r u – al V (t) , ∀t = tk , k ∈ Z. (�.�) Observe that xi (tk+ ) = ( + hik )xi (tk ) and  + hik > �, k ∈ Z. For arbitrary impulse point tk , there exists i� ∈ {, �, . . . , n} such that V (tk ) = max{x (tk ), x� (tk ), . . . , xn (tk )} = xi� (tk ), that is, V tk+ = xi� tk+ = ( + hi� k )xi� (tk ) ≤  + huk V (tk ), k ∈ Z. By Lemma �.�, we obtain from (�.�)-(�.�) lim sup xi (t) ≤ lim sup V (t) ≤ Mi , t→∞ i = , �, . . . , n. t→∞ For any positive constant xi (t) ≤ Mi + � > �, there exists T� > � such that for t ≥ T� , i = , �, . . . , n. � In view of system (.�), it follows that u f (M + � ) l l y˙ (t) ≤ y(t)[ +α l (M + ) – an+ y(t) – bn+ y(t – τn+ (t))],  � y(tk ) = hn+,k y(tk ), t = tk , k ∈ Z, which implies from Lemma �.� that lim sup y(t) ≤ Mn+ . t→∞ This completes the proof. Define ξiu := ln sup k∈Z  ,  + hik i = , �, . . . , n, n + . Proposition �.� Assume that the following condition (H� ) holds: n p := rl – � Dui – i=� –σ ku (s) dsM – cu Mn+ ≥ ξu A, (�.�) Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 n pi := ril – � Duji – j= u pn+ := –rn+ + –σi Page 11 of 23 kiu (s) dsMi ≥ ξiu A, � f l N –  + α u N –σn+ i = �, . . . , n, u u kn+ (s) dsMn+ ≥ ξn+ A, then every solution x(t) = (x (t), x� (t), . . . , xn (t), y(t))T of system (.�) satisfies lim inf xi (t) ≥ Ni := pi – ξiu A u Qi eξi A t→+∞ lim inf y(t) ≥ Nn+ := t→+∞ , u A pn+ – ξn+ u Qn+ eξn+ A , where u t∈R Proof For ∀ � u ( + hik )– e–[pi –(ai +bi )Mi ]τi (t) , Qi := aui + sup bui i = , �, . . . , n + . tk ∈[t–τi (t),t) > �, there exists T� > � such that xi (t) ≤ Mi + �, y(t) ≤ Mn+ + � for t ≥ T� , i = , �, . . . , n. From system (.�), for t ≥ T� , we have ⎧ ⎪ x˙  (t) ≥ x (t)[rl – ni=� Dui – au x (t) – bu x (t – τ (t)) ⎪ ⎪ ⎪ � ⎪ – –σ ku (s) ds(M + � ) – cu (Mn+ + � )], ⎪ ⎨ x˙ i (t) ≥ xi (t)[ril – nj= Duji – aui xi (t) – bui xi (t – τi (t)) ⎪ ⎪ � ⎪ – –σi kiu (s) ds(Mi + � )], i = �, �, . . . , n, t = tk , ⎪ ⎪ ⎪ ⎩ xi (tk ) = hik xi (tk ), k ∈ Z. By Lemma �.� and the arbitrariness of lim inf xi (t) ≥ Ni , � we have i = , �, . . . , n. t→+∞ Then for ∀ �, > �, there exists T� > � such that x (t) ≥ N – �, y(t) ≤ Mn+ + � for t ≥ T� . From system (.�), for t ≥ T� , we have ⎧ f (t)(N – � ) u u u ⎪ ⎨ y˙ (t) ≥ y(t)[–rn+ + +α(t)(N – � ) – an+ y(t) – bn+ y(t – τn+ (t)) � u – –σn+ kn+ (s) ds(Mn+ + � )], t = tk , ⎪ ⎩ y(tk ) = hn+,k y(tk ), k ∈ Z. By Lemma �.� and the arbitrariness of lim inf y(t) ≥ Nn+ . t→+∞ This completes the proof. �, we have Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 12 of 23 Remark �.� When hik (i = , �, . . . , n + , k ∈ Z) ≡ � in system (.�), then Propositions �. and �.� improve the corresponding results in [�]. So Propositions �. and �.� extend and improve the corresponding results in [�]. Remark �.� In view of Propositions �. and �.�, the distance θ between impulse points, the values of impulse coefficients hik (i = , �, . . . , n + , k ∈ Z) and the number A of the impulse points in each interval of length  have negative effect on the uniform persistence of system (.�). By Propositions �. and �.�, we have: Theorem �. Assume that (H )-(H� ) hold, then system (.�) is uniformly persistent. Remark �.� Theorem �. gives the sufficient conditions for the uniform persistence of system (.�). Therefore, Theorem �. provides a possible method to study the permanence of the models with almost periodic impulsive perturbations in biological populations. 4 Global asymptotical stability The main result of this section concerns the global asymptotical stability of positive solution of system (.�). Theorem �. Assume that (H )-(H� ) hold. Suppose further that (H ) there exist positive constants λi such that inf λ a (t) – t∈R – λ b (δ– (t)) – λ  – τ˙ (δ– (t)) α(t)c(t)Mn+ – [ + α(t)N ]� inf λi ai (t) – t∈R n – j= n j= λj Dij (t) λn+ f (t) – Nj  + α(t)N t∈R kn+ (t – s, s) ds – –σn+ > �, � ki (t – s, s) ds –σi > �, – λn+ bn+ (δn+ (t)) –  – τ˙n+ (δn+ (t)) � – λn+ k (t – s, s) ds –σ λ Dj (t) λn+ f (t) – N  + α(t)N λi bi (δi– (t)) – λi  – τ˙i (δi– (t)) inf λn+ an+ (t) – � c(t) > �,  + α(t)N where δj– is an inverse function of τj , i = �, . . . , n, j = , �, . . . , n + . Then system (.�) is globally asymptotically stable. Proof Suppose that X(t) = (x (t), . . . , xn (t), y(t))T and X ∗ (t) = (x∗ (t), . . . , x∗n (t), y∗ (t))T are any two solutions of system (.�). Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 By Theorem �. and (H ), for � < Ni – � ≤ xi (t) ≤ Mi + t∈R α(t)c(t)(Mn+ + � ) – [ + α(t)(N – � )]� inf λi ai (t) – t∈R n – j= �, � < Nn+ – n j= � )] > for t ≥ T� , � k (t – s, s) ds –σ � )] > , � ki (t – s, s) ds –σi � )] > – λn+ bn+ (δn+ (t)) – λn+ –  – τ˙n+ (δn+ (t)) c(t) [ + α(t)(N – ≤ y(t) ≤ Mn+ + > � such that � λj Dij (t) λn+ f (t) – Nj – � [ + α(t)(N – t∈R � λ Dj (t) λn+ f (t) – N – � [ + α(t)(N – λi bi (δi– (t)) – λi  – τ˙i (δi– (t)) inf λn+ an+ (t) – – > � small enough, there exist T� > � and λ b (δ– (t)) – λ  – τ˙ (δ– (t)) inf λ a (t) – – � Page 13 of 23 , � kn+ (t – s, s) ds –σn+ , where i = �, �, . . . , n. Construct a Lyapunov functional as follows: V (t) = V (t) + V� (t) + V� (t), ∀t ≥ T� , where n λi ln xi (t) – ln x∗i (t) + λn+ ln y(t) – ln y∗ (t) , V (t) = i= n t V� (t) = t–τi (t) i= t + t–τn+ (t) n V� (t) = λi bi (δi– (s)) xi (s) – x∗i (s) ds  – τ˙i (δi– (s)) – λn+ bn+ (δn+ (s)) y(s) – y∗ (s) ds, –  – τ˙n+ (δn+ (s)) � t –σi t+s λi i= � ki (l – s, s) xi (l) – x∗i (l) dl ds t + λn+ –σn+ kn+ (l – s, s) y(l) – y∗ (l) dl ds. t+s For t = tk , k ∈ Z, calculating the upper right derivative of V (t) along the solution of system (.�), it follows that n D+ V (t) = λi i= + λn+ x˙ i (t) x˙ ∗i (t) – sgn xi (t) – x∗i (t) xi (t) x∗i (t) y˙ (t) y˙ ∗ (t) sgn y(t) – y∗ (t) – y(t) y∗ (t) n λi –ai (t) xi (t) – x∗i (t) + bi (t) xi t – τi (t) – x∗i t – τi (t) ≤ i= Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 � Page 14 of 23 ki (t, s) xi (t + s) – x∗i (t + s) ds + –σi n + λ sgn x (t) – x∗ (t) Dj (t) [xj (t)x∗ (t) – x (t)x∗j (t)] x (t)x∗ (t) j=� n n λi sgn xi (t) – x∗i (t) + i=� Dji (t) [xj (t)x∗i (t) – xi (t)x∗j (t)] xi (t)x∗i (t) j= + λ sgn x (t) – x∗ (t) – c(t)y∗ (t) c(t)y(t) +  + α(t)x (t)  + α(t)x∗ (t) f (t)x∗ (t) f (t)x (t) –  + α(t)x (t)  + α(t)x∗ (t) + λn+ – λn+ an+ (t) y(t) – y∗ (t) + λn+ bn+ (t) y t – τn+ (t) – y∗ t – τn+ (t) � kn+ (t, s) y(t + s) – y∗ (t + s) ds + λn+ –σn+ n n λi ai (t) xi (t) – x∗i (t) + ≤– i= i= n + λi bi (t) xi t – τi (t) – x∗i t – τi (t) � λi –σi i= n ki (t, s) xi (t + s) – x∗i (t + s) ds λ Dj (t) x (t) – x∗ (t) + N – � + j= n n i=� j= λj Dij (t) xi (t) – x∗i (t) Nj – � + α(t)c(t)(Mn+ + � ) c(t) x (t) – x∗ (t) + [ + α(t)(N – � )]� [ + α(t)(N – + λn+ f (t) [ + α(t)(N – � )] � )] y(t) – y∗ (t) x (t) – x∗ (t) – λn+ an+ (t) y(t) – y∗ (t) + λn+ bn+ (t) y t – τn+ (t) – y∗ t – τn+ (t) � + λn+ kn+ (t, s) y(t + s) – y∗ (t + s) ds. (�.) –σn+ Here we use the following inequality which has been proved in [�]: n sgn xi (t) – x∗i (t) Dji (t) j= [xj (t)x∗i (t) – xi (t)x∗j (t)] xi (t)x∗i (t) n ≤ j= Dji (t) xj (t) – x∗j (t) . Ni – � Moreover, we obtain n D+ V� (t) = i= – λn+ bn+ (δn+ λi bi (δi– (t)) (t)) ∗ + (t) – x (t) x y(t) – y∗ (t) i i – –  – τ˙i (δi (t))  – τ˙n+ (δn+ (t)) n λi bi (t) xi t – τi (t) – x∗i t – τi (t) – i= – λn+ bn+ (t) y t – τn+ (t) – y∗ t – τn+ (t) , n D+ V� (t) = � λi i= –σi ki (t – s, s) xi (t) – x∗i (t) ds (�.�) Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 � Page 15 of 23 kn+ (t – s, s) y(t) – y∗ (t) ds + λn+ –σn+ n � – λi –σi i= � – λn+ ki (t, s) xi (t + s) – x∗i (t + s) ds kn+ (t, s) y(t + s) – y∗ (t + s) ds. (�.�) –σn+ From (�.)-(�.�), one has D+ V (t) ≤ – λ a (t) – – λ b (δ– (t)) – λ  – τ˙ (δ– (t)) α(t)c(t)(Mn+ + � ) – [ + α(t)(N – � )]� n – λi ai (t) – i=� n j= j= – λn+ an+ (t) – c(t) [ + α(t)(N – k (t – s, s) ds –σ λ Dj (t) λn+ f (t) – N – � [ + α(t)(N – λi bi (δi– (t)) – λi  – τ˙i (δi– (t)) λj Dij (t) λn+ f (t) – Nj – � [ + α(t)(N – – – n � � )] x (t) – x∗ (t) � ki (t – s, s) ds –σi xi (t) – x∗i (t) – λn+ bn+ (δn+ (t)) – λn+ –  – τ˙n+ (δn+ (t)) � )] � )] � kn+ (t – s, s) ds –σn+ y(t) – y∗ (t) n xi (t) – x∗i (t) + y(t) – y∗ (t) . ≤– (�.�) i= For t = tk , k ∈ Z, we have V tk+ = V tk+ + V� tk+ + V� tk+ n λi ln xi tk+ – ln x∗i tk+ + λn+ ln y tk+ – ln y∗ tk+ + V� (tk ) + V� (tk ) = i= n = λi ln i= ( + hik )xi (tk ) + dik ( + hik )x∗i (tk ) + dik + λn+ ln ( + hn+,k )y(tk ) + dn+,k + V� (tk ) + V� (tk ) ( + hn+,k )y∗ (tk ) + dn+,k = V (tk ) + V� (tk ) + V� (tk ) = V (tk ). Therefore, V is nonincreasing. Integrating (�.�) from T� to t leads to t n T� i= xi (s) – x∗i (s) + y(s) – y∗ (s) V (t) + ds ≤ V (T� ) < +∞, ∀t ≥ T� , Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 16 of 23 that is, +∞ T� n xi (s) – x∗i (s) + y(s) – y∗ (s) ds < +∞, i= which implies that lim xi (s) – x∗i (s) = �, s→+∞ lim y(s) – y∗ (s) = �, s→+∞ i = , �, . . . , n. Thus, system (.�) is globally asymptotically stable. This completes the proof. Remark �. Theorem �. gives a sufficient condition for the global asymptotical stability of system (.�). Therefore, Theorem �. extends the corresponding result in [�] and provides a possible method to study the global asymptotical stability of the models with impulsive perturbations in biological populations. 5 Almost periodic solution In this section, we investigate the existence and uniqueness of a globally asymptotically stable positive almost periodic solution of system (.�) by using almost periodic functional hull theory of impulsive differential equations. Let {sn } be any integer valued sequence such that sn → ∞ as n → ∞. Taking a subsequence if necessary, we have ri (t + sn ) → ri∗ (t), ai (t + sn ) → a∗i (t), bi (t + sn ) → b∗i (t), c(t + sn ) → c∗ (t), f (t + sn ) → f ∗ (t), α(t + sn ) → α ∗ (t), Dij (t + sn ) → D∗ij (t), τi (t + sn ) → τi∗ (t), ki (t + sn ) → ki∗ (t, s), as n → ∞ for t ∈ R, s ∈ (–∞, �], i = , �, . . . , n + , j = , �, . . . , n. From Lemma �. it follows that the set of sequences {tk – sn }, k ∈ Z is convergent to the sequence {tks } uniformly with respect to k ∈ Z as n → ∞. By {kni } we denote the sequence of integers such that the subsequence {tkni } is convergent to the sequence {tks } uniformly with respect to k ∈ Z as i → ∞. From the almost periodicity of {hik }, it follows that there exists a subsequence of the sequence {kni } such that the sequences {hikni } are convergent uniformly to the limits denoted by hsik , i = , �, . . . , n + . Then we get hull equations of system (.�) as follows: ⎧ ∗ ∗ ∗ ∗ ⎪  (t – τ (t)) ⎪ x˙  (t) = x (t)[r (t) – a (t)x (t) – b (t)x ⎪ ∗ (t)y(t) � c ⎪ ∗ ⎪ – –σ k (t, s)x (t + s) ds – +α∗ (t)x (t) ] + ni=� D∗i (t)[xi (t) – x (t)], ⎪ ⎪ ⎪ ⎪ ⎪ x˙ i (t) = xi (t)[ri∗ (t) – a∗i (t)xi (t) – b∗i (t)xi (t – τi∗ (t)) ⎪ ⎪ ⎪ � ⎨ – –σi ki∗ (t, s)xi (t + s) ds] + nj= D∗ji (t)[xj (t) – xi (t)], i = �, �, . . . , n, f ∗ (t)x (t) ∗ ∗ ∗ ∗ ⎪ ⎪ y˙ (t) = y(t)[–rn+ (t) + +α∗ (t)x (t) – an+ (t)y(t) – bn+ (t)y(t – τn+ (t)) ⎪ ⎪ � ⎪ ∗ ⎪ (t, s)y(t + s) ds], t = tks , – –σn+ kn+ ⎪ ⎪ ⎪ ⎪ s s s ⎪ xj (tk ) = hjk xj (tk ), j = , �, . . . , n, ⎪ ⎪ ⎩ y(tks ) = hsn+,k y(tks ), k ∈ Z. (�.) By the almost periodic theory, we can conclude that if system (.�) satisfies (H )-(H ), then the hull equations (�.) of system (.�) also satisfy (H )-(H ). By Lemma �.� in [], we can easily obtain the lemma as follows. Lemma �. If each hull equation of system (.�) has a unique strictly positive solution, then system (.�) has a unique strictly positive almost periodic solution. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 17 of 23 By using Lemma �., we obtain the following result. Lemma �.� If system (.�) satisfies (H )-(H ), then system (.�) admits a unique strictly positive almost periodic solution. Proof By Lemma �., in order to prove the existence of a unique strictly positive almost periodic solution of system (.�), we only need to prove that each hull equation of system (.�) has a unique strictly positive solution. Firstly, we prove the existence of a strictly positive solution of any hull equations (�.). According to the almost periodic hull theory of impulsive differential equations (see []), there exists a time sequence {sn } with sn → ∞ as n → +∞ such that ri (t + sn ) → ri∗ (t), ai (t + sn ) → a∗i (t), bi (t + sn ) → b∗i (t), c(t + sn ) → c∗ (t), f (t + sn ) → f ∗ (t), α(t + sn ) → α ∗ (t), Dij (t + sn ) → D∗ij (t), τi (t + sn ) → τi∗ (t), ki (t + sn ) → ki∗ (t, s), as n → ∞ for t ∈ R, t = tk , k ∈ Z, s ∈ (–∞, �], i = , �, . . . , n + , j = , �, . . . , n. There exists a subsequence {kn } of {n}, kn → +∞, n → +∞ such that tkn → tks , hikn → hsik , i = , �, . . . , n + . Suppose x(t) = (x (t), x� (t), . . . , xn (t), y(t))T is any positive solution of hull equations (�.). By the proof of Theorem �., for ∀ > �, there exists T� > � such that Ni – ≤ xi (t) ≤ Mi + , Nn+ – ≤ y(t) ≤ Mn+ + , t ≥ T� , i = , �, . . . , n. (�.�) Let xn (t) = x(t + sn ) for all t ≥ –sn + T� , n = , �, . . . , such that ⎧ ∗ ∗ ∗ ∗ ⎪ ⎪  (t + sn ) – a (t + sn )x (t) – b (t + sn )x (t – τ (t + sn )) ⎪ x˙  (t) = x (t)[r ∗ ⎪ � c (t+sn )y(t) ⎪ ⎪ – –σ k∗ (t + sn , s)x (t + s) ds – +α ∗ (t+s )x (t) ] ⎪ n  ⎪ ⎪ n ⎪ ∗ ⎪ + i=� Di (t + sn )[xi (t) – x (t)], ⎪ ⎪ ⎪ ⎪ ⎪ x˙ (t) = xi (t)[ri∗ (t + sn ) – a∗i (t + sn )xi (t) – b∗i (t + sn )xi (t – τi∗ (t + sn )) ⎪ ⎪ i ⎪ � ⎪ – –σi ki∗ (t + sn , s)xi (t + s) ds] ⎪ ⎨ + nj= D∗ji (t + sn )[xj (t) – xi (t)], i = �, �, . . . , n, ⎪ ⎪ f ∗ (t+sn )x (t) ∗ ∗ ⎪ (t + sn ) + +α y˙ (t) = y(t)[–rn+ ⎪ ∗ (t+s )x (t) – an+ (t + sn )y(t) ⎪ n  ⎪ ⎪ ∗ ⎪ (t + sn )) – b∗n+ (t + sn )y(t – τn+ ⎪ ⎪ ⎪ � ⎪ ∗ ⎪ – k (t + s , s)y(t + s) ds], t = tks , ⎪ n –σn+ n+ ⎪ ⎪ ⎪ x (t s ) = hs x (t s ), j = , �, . . . , n, ⎪ ⎪ j k jk j k ⎪ ⎪ ⎩ y(t s ) = hs y(t s ), k ∈ Z. k n+,k k (�.�) From the inequality (�.�), there exists a positive constant K which is independent of n such that |˙xn | ≤ K for all t ≥ –sn + T� , n = , �, . . . . Therefore, for any positive integer r sequence {xn (t) : n ≥ r} is uniformly bounded and equicontinuous on [–sn + T� , ∞). According to Ascoli-Arzela theorem, one can conclude that there exists a subsequence {sm } of {sn } such that sequence {xm (t)} not only converges on t on R, but it also converges uniformly on any compact set of R as m → +∞. Suppose limm→+∞ xm (t) = x∗ (t) = (x∗ (t), x∗� (t), . . . , x∗n (t), y(t))T , then we have Ni – ≤ xi (t) ≤ Mi + , Nn+ – ≤ y(t) ≤ Mn+ + , t ∈ R, i = , �, . . . , n. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 18 of 23 From differential equations (�.�) and the arbitrariness of , we can easily see that x∗ (t) is the solution of the hull equations (�.) and Ni ≤ x∗i (t) ≤ Mi for all t ∈ R, i = , �, . . . , n. Hence each hull equation of the almost periodic system (.�) has at least a strictly positive solution. Now we prove the uniqueness of the strictly positive solution of each hull equations (�.). Suppose that the hull equations (�.) have two arbitrary strictly positive solutions x(t) = (x (t), x� (t), . . . , xn (t), y(t))T and x∗ (t) = (x∗ (t), x∗� (t), . . . , x∗n (t), y∗ (t))T , which satisfy Ni – ≤ xi (t), x∗i (t) ≤ Mi + , Nn+ – ≤ y(t), y∗ (t) ≤ Mn+ + , t ∈ R, i = , �, . . . , n. Similar to Theorem �., we define a Lyapunov functional V ∗ (t) = V∗ (t) + V�∗ (t) + V�∗ (t), ∀t ∈ R, where n V∗ (t) = λi ln xi (t) – ln x∗i (t) + λn+ ln y(t) – ln y∗ (t) , i= n t V�∗ (t) = t–τi (t) i= t + ∗ (t) t–τn+ n V�∗ (t) = λi b∗i (δi∗– (s)) xi (s) – x∗i (s) ds  – τ˙∗ i (δi∗– (s)) ∗– λn+ b∗n+ (δn+ (s)) y(s) – y∗ (s) ds, ∗– ∗ ˙  – τ n+ (δn+ (s)) � t –σi t+s λi i= � ki∗ (l – s, s) xi (l) – x∗i (l) dl ds t + λn+ –σn+ t+s ∗ kn+ (l – s, s) y(l) – y∗ (l) dl ds, where δj∗– is an inverse function of τj∗ , j = , �, . . . , n + . Similar to the argument in (�.�), one has n D+ V ∗ (t) ≤ – xi (t) – x∗i (t) + y(t) – y∗ (t) , ∀t ∈ R. i= Summing both sides of the above inequality from t to �, we have n � t xi (s) – x∗i (s) + y(s) – y∗ (s) ds ≤ V ∗ (t) – V (�), i= Note that V ∗ is bounded. Hence we have � n –∞ i= xi (s) – x∗i (s) + y(s) – y∗ (s) ds < ∞, ∀t ≤ �. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 19 of 23 which implies that n xi (s) – x∗i (s) = lim y(s) – y∗ (s) = �, lim s→–∞ s→–∞ i= For arbitrary � i = , �, . . . , n. > �, there exists a positive constant L such that max xi (t) – x∗i (t) , y(t) – y∗ (t) < �, ∀t < –L, i = , �, . . . , n. Hence, one has n+ V∗ (t) ≤ i= λi � , Ni n+ V�∗ (t) ≤ τiu i= λi bui �,  – supt∈R τ˙i (t) n+ V�∗ (t) ≤ ∀t < –L, � λi –σi i= (–s)kiu (s) ds � , ∀t < –L, ∀t < –L, which imply that there exists a positive constant ρ such that V ∗ (t) < ρ � , ∀t < –L. So lim V ∗ (t) = �. t→–∞ Note that V ∗ (t) is a nonincreasing function on R, and then V ∗ (t) ≡ �. That is, xi (t) = x∗i (t), y(t) = y∗ (t), ∀t ∈ R, i = , �, . . . , n. Therefore, each hull equation of system (.�) has a unique strictly positive solution. In view of the above discussion, any hull equation of system (.�) has a unique strictly positive solution. By Lemma �., system (.�) has a unique strictly positive almost periodic solution. The proof is completed. By Theorem �. and Lemma �.�, we obtain the following. Theorem �. Suppose that (H )-(H ) hold, then system (.�) admits a unique strictly positive almost periodic solution, which is globally asymptotically stable. Remark �. Theorem �. gives sufficient condition for the global asymptotical stability of a unique positive almost periodic solution of system (.�). Therefore, Theorem �. extends the corresponding result in [�] and provides a possible method to study the existence, uniqueness, and stability of positive almost periodic solution of the models with impulsive perturbations in biological populations. Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 20 of 23 6 An example and numerical simulations Example �. Consider the following Lotka-Volterra type predator-prey dispersal system with impulsive effects: ⎧ √ ⎪ x˙  (t) = x (t)[� – (� + sin( �t))x (t) – �.x (t – ) – �.��y(t) ] ⎪ +x (t) ⎪ ⎪ ⎪ ⎪ + �.�[x (t) – x (t)], �  ⎪ ⎪ √ ⎪ � ⎪ ⎪ �t) – �x� (t) – –�. x� (t + s) ds] ⎨ x˙ � (t) = x� (t)[ + cos( √ + �. cos( �t)[x (t) – x� (t)], ⎪ √ ⎪ �x (t) ⎪ ⎪ ⎪ y˙ (t) = y(t)[–�.�| cos( �t)| + +x (t) – �y(t)], t = tk , ⎪ ⎪ ⎪ xi (tk ) = –�.�xi (tk ), i = , �, ⎪ ⎪ ⎪ ⎩ y(t ) = –�.�y(t ), {t : k ∈ Z} ⊂ {�k : k ∈ Z}. k k k (�.) Then system (�.) is uniformly persistent and has a unique globally asymptotically stable almost periodic solution. Proof Corresponding to system (.�), we have ru θ – ξ l = � – �.� > � and ryu θ – ξ�l = .� × � – �.� > �. Then (H� ) in Proposition �. holds. By calculation, we obtain M = M� ≈ �.�, M� ≈ .��. Further, p = � – �.� – �.�� × .�� ≥ �.� = ξu A, N ≈ �., p� = � – �. – �. × �.� ≥ �.� = ξ�u A, p� = –�.� + �×�. ≥ �.� = ξ�u A, which imply that (H� ) in Proposition �.� +�. holds. Obviously, (H )-(H� ) in Theorem �. hold and system (�.) is uniformly persistent (see Figure ). Taking λ = λ� = , λ� = �., corresponding to system (.�), we get inf λ a (t) – t∈R – λ b (δ– (t)) – λ  – τ˙ (δ– (t)) α(t)c(t)Mn+ – [ + α(t)N ]� ≥ � – �. – � – n j= � k (t – s, s) ds –σ λ Dj (t) λn+ f (t) – N  + α(t)N �.� �.� �.�� × .�� – > �, – ( + �.)� �.  + �. Figure 1 Uniform persistence and almost periodic oscillation of system (6.1). Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Page 21 of 23 Figure 2 Global asymptotical stability of state variable x1 of system (6.1). Figure 3 Global asymptotical stability of state variable x2 of system (6.1). inf λi ai (t) – t∈R λi bi (δi– (t)) – λi  – τ˙i (δi– (t)) ≥ � – � – �. – inf λn+ an+ (t) – t∈R ≥ �.� – � – � – n � ki (t – s, s) ds – –σi j= λj Dij (t) λn+ f (t) – Nj  + α(t)N �.� �. – > �, �.  + �. – λn+ bn+ (δn+ (t)) – λn+ –  – τ˙n+ (δn+ (t)) � kn+ (t – s, s) ds – –σn+ c(t)  + α(t)N �.�� > �.  + �. Hence (H ) in Theorem �. is satisfied. By Theorem �., system (�.) has a unique globally asymptotically stable almost periodic solution (see Figures �-�). This completes the proof. 7 Conclusion By applying the comparison theorem, the Lyapunov functional, and almost periodic functional hull theorem of the impulsive differential equations, this paper gives some new sufficient conditions for the uniform persistence, global asymptotical stability, and almost Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 Figure 4 Global asymptotical stability of state variable y of system (6.1). periodic solution to a nonautonomous dispersal competition system with impulsive effects. Theorem �. and Theorem �. indicate that the distance θ between impulse points, the values of the impulse coefficients hik (i = , �, . . . , n, k ∈ Z), and the number A of the impulse points in each interval of length  are harmful for the uniform persistence and existence of a unique globally asymptotically stable positive almost periodic solution for the model. The main results obtained in this paper are completely new and the method used in this paper provides a possible method to study the uniform persistence and existence of a unique globally asymptotically stable positive almost periodic solution of the models with impulsive perturbations in biological populations. Competing interests The authors declare that they have no competing interests. Authors’ contributions Each of the authors contributed to each part of this study equally and read and approved the final version of the manuscript. Author details 1 School of Mathematics and Computer Science, Panzhihua University, Panzhihua, Sichuan 617000, China. 2 Department of Mathematics, Aba Teachers College, Wenchuan, Sichuan 623002, China. Acknowledgements The authors thank the reviewer for his constructive remarks that led to the improvement of the original manuscript. Received: 14 February 2014 Accepted: 26 September 2014 Published: 14 Oct 2014 References 1. Chen, S, Wang, T, Zhang, J: Positive periodic solution for non-autonomous competition Lotka-Volterra patch system with time delay. Nonlinear Anal., Real World Appl. 5, 409-419 (2004) 2. Xiao, Y, Chen, L, Tang, S: Permanence and periodic solution in an integrodifferential system with discrete diffusion. J. Syst. Sci. Complex. 16, 114-121 (2003) 3. Cui, J, Chen, L: The effect of diffusion on the time varying logistic population growth. Comput. Math. Appl. 36, 1-9 (1998) 4. Levin, SA: Dispersion and population interactions. Am. Nat. 108, 207-228 (1974) 5. Meng, XZ, Chen, LS: Periodic solution and almost periodic solution for a nonautonomous Lotka-Volterra dispersal system with infinite delay. J. Math. Anal. Appl. 339, 125-145 (2008) 6. Kouche, M, Tatar, N: Existence and global attractivity of a periodic solution to a nonautonomous dispersal system with delays. Appl. Math. Model. 31, 780-793 (2007) 7. Dong, LZ, Chen, LS, Shi, PL: Periodic solutions for a two-species nonautonomous competition system with diffusion and impulses. Chaos Solitons Fractals 32, 1916-1926 (2007) 8. Berryman, AA: The origins and evolution of predator-prey theory. Ecology 75, 1530-1535 (1992) 9. Sun, YG, Saker, SH: Positive periodic solutions of discrete three-level food-chain model of Holling type II. Appl. Math. Comput. 180, 353-365 (2006) Page 22 of 23 Xu and Wu Advances in Difference Equations 2014, 2014:264 http://www.advancesindifferenceequations.com/content/2014/1/264 10. Li, YK, Lu, LH, Zhu, XY: Existence of periodic solutions in n-species food-chain system with impulsive. Nonlinear Anal., Real World Appl. 7, 414-431 (2006) 11. Xu, R, Chen, LS, Hao, FL: Periodic solutions of a discrete time Lotka-Volterra type food-chain model with delays. Appl. Math. Comput. 171, 91-103 (2005) 12. Shen, CX: Permanence and global attractivity of the food-chain system with Holling IV type functional response. Appl. Math. Comput. 194, 179-185 (2007) 13. Baek, H: A food chain system with Holling type IV functional response and impulsive perturbations. Comput. Math. Appl. 60, 1152-1163 (2010) 14. Cui, GH, Yan, XP: Stability and bifurcation analysis on a three-species food chain system with two delays. Commun. Nonlinear Sci. Numer. Simul. 16, 3704-3720 (2011) 15. Liu, ZJ, Zhong, SM, Liu, XY: Permanence and periodic solutions for an impulsive reaction-diffusion food-chain system with ratio-dependent functional response. Commun. Nonlinear Sci. Numer. Simul. 19, 173-188 (2014) 16. Meng, XZ, Chen, LS: Almost periodic solution of non-autonomous Lotka-Volterra predator-prey dispersal system with delays. J. Theor. Biol. 243, 562-574 (2006) 17. Lakshmikantham, V, Bainov, DD, Simeonov, PS: Theory of Impulsive Differential Equations. World Scientific, Singapore (1989) 18. Stamov, GT: Almost Periodic Solutions of Impulsive Differential Equations. Lecture Notes in Mathematics (2012) 19. Samoilenko, AM, Perestyuk, NA: Impulsive Differential Equations. World Scientific, Singapore (1995) 20. Bainov, DD, Simeonov, PS: Impulsive Differential Equations: Periodic Solutions and Applications. Longman, Harlow (1993) 21. Jin, Z, Han, MA, Li, GH: The persistence in a Lotka-Volterra competition systems with impulsive. Chaos Solitons Fractals 24, 1105-1117 (2005) 22. Stamov, GT: On the existence of almost periodic solutions for the impulsive Lasota-Wazewska model. Appl. Math. Lett. 22, 516-520 (2009) 23. Ahmad, S, Stamov, GT: Almost periodic solutions of N-dimensional impulsive competitive systems. Nonlinear Anal., Real World Appl. 10, 1846-1853 (2009) 24. Liu, ZJ, Chen, LS: Periodic solution of a two-species competitive system with toxicant and birth pulse. Chaos Solitons Fractals 32, 1703-1712 (2007) 25. Zhang, TW, Li, YK: Positive periodic solutions for a generalized impulsive n-species Gilpin-Ayala competition system with continuously distributed delays on time scales. Int. J. Biomath. 4, 23-34 (2011) 26. He, MX, Chen, FD, Li, Z: Almost periodic solution of an impulsive differential equation model of plankton allelopathy. Nonlinear Anal., Real World Appl. 11, 2296-2301 (2010) 27. Zhang, TW, Li, YK, Ye, Y: On the existence and stability of a unique almost periodic solution of Schoener’s competition model with pure-delays and impulsive effects. Commun. Nonlinear Sci. Numer. Simul. 17, 1408-1422 (2012) 28. Ahmad, S, Stamov, GT: Almost periodic solutions of N-dimensional impulsive competitive systems. Nonlinear Anal., Real World Appl. 10, 1846-1853 (2009) 29. Ahmad, S, Stamov, GT: On almost periodic processes in impulsive competitive systems with delay and impulsive perturbations. Nonlinear Anal., Real World Appl. 10, 2857-2863 (2009) 10.1186/1687-1847-2014-264 Cite this article as: Xu and Wu: Dynamics of a nonautonomous Lotka-Volterra predator-prey dispersal system with impulsive effects. Advances in Difference Equations 2014, 2014:264 Page 23 of 23
© Copyright 2026 Paperzz