2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU 2014)
Gezinge ve Konum Kestirim Yöntemlerinde Mesafe
ve Atalet Duyargalarının Kullanımı
Using Range and Inertia Sensors for Trajectory and
Pose Estimation
Furkan Çakmak, Erkan Uslu, Sırma Yavuz, M. Fatih Amasyalı, Muhammet Balcılar, Nihal Altuntaş
Bilgisayar Mühendisliği Bölümü
Yıldız Teknik Üniversitesi
İstanbul, Türkiye
{furkan, erkan, sirma, mfatih, muhammet}@ce.yildiz.edu.tr, [email protected]
kullanılarak üretilmiş çözümlerdir [1]. Bu çözümde, mobil
robot üzerinde bulunan tekerleklerin dönme miktarına
bakılarak kinematik denklemler aracılığıyla gezinge
çıkarılmaktadır. Burada tekerleğin döndüğü kadar robotun
gittiği varsayılmaktadır. Oysaki yer çekiminden veya yerin
sürtünme kuvveti gibi sebeplerden kaynaklanan
ötelenmeler ve yerinde saymalar robotun tekerleklerinin
döndüğünden farklı miktarda hareket etmesine sebep
olacaktır. İşlem karmaşıklığı az olmasına rağmen ortam
bağımlı ve düşük performanslı bir yöntemdir.
Mobil robotlarda gezinge çıkarımı, robotun harita üzerinde
izlediği yolun belirlenmesi ve bu yol üzerinden robotun
hedefine olan mesafesinin tespiti, robotun engellere
takılmadan güvenli bir şekilde yoluna devam edebilmesi ve
robotun eğitilebilmesi açısından oldukça önemlidir. Bu
çalışmada, belirlenen bir alan içerisinde mobil bir robot ile
tekerlek odometrisi kullanılmadan gezinge çıkarımı
amaçlanmıştır. Bunun için temel olarak 2 farklı yöntem
kullanılmıştır. İlki, en çok kullanılan eş zamanlı konum
belirleme ve haritalama (SLAM) algoritmalarından olan
sadece lazer mesafe duyargası bilgisini kullanan gMapping ile
gezinge çıkarımı, ikincisi ise lazer mesafe duyargası tabanlı
laser_scan_matcher (LSM) ile gezinge çıkarımıdır. LSM ile
gezinge çıkarımında hız bilgisi ve atalet duyargası da
kullanılmıştır. Tüm yöntemler, alt başlıklar halinde
incelenmiştir.
Bir diğer yöntem, lazer mesafe duyargası kullanılarak
yapılan, tarama eşlemeye dayalı LSM [2, 3] yöntemidir.
Bu yöntemde, bir lazer mesafe duyargası ile ardışık
zamanlarda alınan ortama ait ölçüm bilgileri kıyaslanarak
robotun hareketin (translation) ve dönmesinin (rotation) ne
kadar olduğu hesaplanmaktadır. Sadece son iki ölçümün
değerlendirilmesi ve lazer mesafe duyargasının ölçüm
mesafesinin uzunluğu, özellikle birbirine çok benzeyen
ortamlarda (düz bir koridor vb.) alınan taramaların
birbirine benzemesi sebebiyle gezinge çıkarımı
yapılamamaktadır. Ancak LSM ile birlikte robotun hız
bilgisi ve/veya atalet duyargasından alınan bilgi gibi çeşitli
ek bilgiler kullanılarak bu sorun en aza indirilebilmektedir.
Literatürde yaygın olarak kullanılan yöntemlerden bir
diğeri de SLAM algoritmaları ile gezinge çıkarımıdır [47]. Bu yöntemlerde LSM’de olduğu gibi tarama eşleme ile
konum belirleme yapılmaktadır. Önemli noktalardan birisi
konum belirlemenin sadece ardışık zamanlarda alınan
tarama verileriyle olmaması aynı zamanda önceden alınan
verilere göre hesaplanan konumların bilgisinin gezinge
çıkarımında kullanılmasıdır.
Özellikle son araştırmalarda görsel odometrinin
gezinge çıkarımında kullanıldığı görülmektedir [8, 9]. Bu
çalışmalarda bir kamera yardımı ile farklı zaman
aralıklarında ortamın görüntüsü alınmakta ve bu görüntüler
birbirleri ile eşlenmeye çalışılarak robotun hareket ve
dönme miktarı hesaplanabilmektedir. Derinlik bilgisi
okuyabilen kameralar (Kinect vb.) ile lazer mesafe
Anahtar Kelimeler — gezinge çıkarımı, LSM, gMapping.
Trajectory estimation is important for mobile robots as it
can be used in path extraction, distance to target estimation,
obstacle avoidance and autonomous control. This work mainly
focuses on trajectory and pose estimation based on range and
inertia sensors without the need of wheel odometry. Mainly two
different approaches are implemented for trajectory and pose
estimation namely simultaneous localization and mapping
(SLAM) based gMapping and iterative closest point based
laser_scan_matcher (LSM) implementation is improved with
the use of inertia sensor and kinematic velocity information.
These methods are explained in subsections.
Keywords — trajectory estimation, LSM, gMapping.
I.
GİRİŞ
Mobil robotlarda gezinge çıkarımında farklı yöntemler
kullanılmaktadır. Bunlardan en temeli tekerlek odometrisi
Bu çalışma, Türkiye Bilimsel ve Teknolojik Araştırma Kurumu
TÜBİTAK (EEEAG- 113E212) ve Yıldız Teknik Üniversitesi Bilimsel
Araştırma
Projeleri
Koordinatörlüğü'nce
(2013-04-01-KAP02)
desteklenmiştir.
978-1-4799-4874-1/14/$31.00 ©2014 IEEE
506
2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU 2014)
duyargasının işlevine ek olarak göörüntü bilgisi de
kullanıldığı için daha doğru sonuçlar ürettilmektedir.
çizilmesi, ardından diğer gezzingelerle kıyaslayabilmek
için çizimin sayısallaştırılmasıından oluşmaktadır. Bunun
dışında 6 farklı gezinge çıkarım yöntemi daha
uygulanmıştır. Bunlara ait yaapılandırmalar ve gezinge
yöntemlerini temsil eden renkleer Tablo-1’de verilmiştir.
Bu çalışma kapsamında LSM vee SLAM tabanlı
gezinge çıkarım yöntemleri üzerinnde durulmuştur.
Çalışmanın
ikinci
bölümünde
k
kullanılan
robot
platformunun ve çalışma alanının özzellikleri verilmiş,
üçüncü bölümünde gezinge çıkarım yööntemleri üzerinde
durulmuş, dördüncü bölümde karşıılaştırmalı olarak
deneysel sonuçlara, sonuç bölümünde isee genel çıkarımlara
ve gelecekte yapılabilecek çalışmalara yeer verilmiştir.
II.
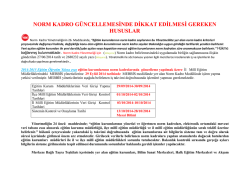
A. Kinematik Tabanlı Gezingee Çıkarımı
Kinematik tabanlı gezingee çıkarımında robotun hız
bilgisinden yararlanılmıştır. Aççık çevrim kontrollü olarak
anlık hız bilgisinin zamanla çarrpımından gidilen yol bilgisi
elde edilmektedir. Şekil 2’dde robotun hareketine ait
kinematik model resmedilmiştirr.
SİSTEM TANITIMI
Yapılan çalışmada, Robot Operatingg System (ROS)
uyumlu olarak geliştirilen tekerlekli biir robot platformu
kullanılmıştır. Deneyler için 734 484 cm
m boyutlarında bir
alan oluşturulmuştur. Alt bölümlerde robbot platformuna ve
çalışma alanına ilişkin detaylı bilgi verilm
miştir.
Gezinge Çıkarım
Yöntemi
Kinematik
gMapping
LSM
LSM-K
LSM-A
LSM-AK
Yer Gerçeği
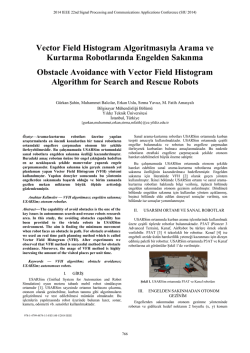
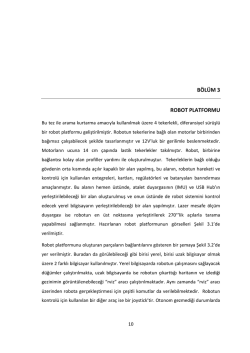
A. Robot Platformu
Deney kapsamında, 4 tekerlek çeekişli, diferansiyel
sürüşlü, üzerinde bir adet 3000 cm’ye kaadar 270 derecelik
ölçüm yapabilen Hokuyo UTM-30LX laazer mesafe ölçüm
duyargası ve bir adet Microstrain 3D
DM-GX3-25 atalet
duyargası bulunan, yönetme kolu ile kumanda edilen,
52 47 85 cm boyutlarında bir mobil roobot kullanılmıştır.
Robotun görünümü Şekil 1-a’da verilm
miştir. Robot, ROS
Hydro sürümü ile uyumlu olacak şekilde tasarlanmıştır.
Kullanılaan Duyargalar
veya Bilgiler
Hız
Lazer
Lazer
Lazzer + Hız
Lazeer + Atalet
Lazer + Hız +Atalet
-
Gezinge
Rengi
Tablo 1. Konfigürrasyon tablosu
Robota ilişkin ilk poz durum
mundan
,
sonraki oluşacak poz durumunna
, ,
verilen şekilde hesaplanabilir.
Δ süre
,
geçiş (1) ile
Δ
Δ
coss
sin
n
(1)
Δ
Vx
Vz
(b)
r
d
α
Şekil 1. Kinematik model.
(a)
B. Laser_scan_matcher
Çıkarımı
(c)
Tabanlı
Gezinge
Lazer mesafe duyargası temelli gezinge tespiti
algoritması olan LSM [2], iteeratif en yakın nokta (ICP)
temelli nokta-doğru ölçüt iteraatif en yakın nokta (PLICP)
noktalar
algoritmasıdır. ICP algoritmaası, verilen
kümesinden
yüzeyine hangi
,
rotoö
) ile ulaşacağını
translation (dönüş
ve öteleme
noktalar
yinelemeli olarak hesaplayan bir
b yöntemdir.
kümesi için roto-translation taanımı (2) ile verilebilir.
Şekil 1. (a) Robot platformuna ait görsel, (b) çaalışma alanına ilişkin
görsel, (c) çalışma alanına ilişkinn plan.
B. Çalışma Alanı
Çalışma ortamı 734 484 120 cm boyutlarında
suntadan yapılmış labirent şeklinde birr alandır. Şekil 1b’de çalışma alanı görseline, Şekil 1-c’de ise çalışma
alanına ait plana yer verilmiştir. Labirenttin koridorlarının
ekseninde uzunlukları 600 cm’dir.
III.
(L
LSM)
,
NTEMLERİ
GEZİNGE ÇIKARIM YÖN
(2)
d
noktalar
ICP algoritması
ile dönüştürülmüş
kümesinin
’te Öklid karrşılıkları olan noktalar ile
uzaklıklarını üzerinden en küçüklemeye
k
çalışmaktadır.
ICP için (3)’de verilen kısıt denkleminde,
d
,
ile
üzerine Öklid izdüşümü iffade edilmektedir.
Robotun gezinmesi esnasında 7 farklı gezinge
çıkartılmaktadır. İlki yer gerçeği gezingeesidir. Bu gezinge,
robota yerleştirilen bir işaretleyici yarrdımı ile çalışma
alanı içerisinde robotun gezdiği gerçeek konumun yere
507
2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU 2014)
min
C. gMapping Tabanlı Gezingee Çıkarımı
,
(3)
Eş zamanlı konum belirlem
me ve haritalama (SLAM)
algoritmalarından gMapping [44] ile lazer mesafe duyargası
kullanılarak
gezinge
çıkkarılması
amaçlanmıştır.
gMapping’in LSM tabanlı gezinge çıkarım yöntemleri ile
karşılaştırılmasındaki temel amaç, gezinge hatasının
artımsal olmaması, global olaraak giderilebilmesidir.
(3) ile verilen denklem için kapalı formda bir çözüm
olmadığından bir
ilk dönüşüm duruumundan hareketle
ICP için yinelemeli kısıt denklemi (4) ilee verilebilir.
min
,
gMapping, Rao-Blackwellizzed Particle Filters (RBPF)
kullanan hücre tabanlı harita çıkarım
ç
yöntemlerindendir.
Her parçacık, robotun geçmiş pozların ve harita bilgisini
tutmaktadır. Yeni lazer ölçümleeri ile her parçacığın inancı
yenilenmektedir. Parçacıkların inancı haritanın şeklini ve
o
ihtiva etmektedir.
o an o harita üzerinde nerede olduğunu
Mesafe ölçümleri, tarama eşleştirme yönteminde
kullanılmaktadır. Ardışık alınann iki taramanın birbirleri ile
eşleştirilmeye çalışılması ille robotun yeni pozu
hesaplanmaktadır. gMapping allgoritmasının adımları;
1) Ölçüm: Yeni lazer ölçüm
mü alınır.
2) Tarama Eşleme: Ardışıkk iki tarama eşleştirilir.
| :, :
3) Örnekleme: Önerilen dağılımı
, şimdiki
örnekleyerek yeni nesil paarçacıklar
parçacıklar
üzerinden üretilirler.
4) Ağırlıklandırma: Her birr parçacık için (6) numaralı
denklemde verildiği şekliylle parçacıkların bireysel
ağırlıkları
hesaplanır.
(4)
,· ’e ilişkin tanımlara göre
g
farklı ICP
yaklaşımları tanımlanmıştır. PLICP algoritması ise
karşılaştırılacak noktanın referans yüzeyii üzerinde en yakın
olduğu doğruya mesafesini kapalı form
mda bir çözüm ile
kullanmaktadır. Bu sebeple, nokta-nookta eşleştirmeleri
doğrusal yakınsarken, PLICP karesel ollarak yakınsar. ,
referans yüzeyde en yakın doğru norm
malinin transpozu
olmak üzere, PLICP kısıt denklemi (5) ile verilmektedir.
min
,
(5)
PLICP algoritması,
referans lazer
l
taraması,
ikinci lazer taraması,
dönüşüm değğeri, ikinci lazer
ölçümü nokta indisleri, referans lazer taraması nokta
indisleri ve yineleme adımı indisi olmaak üzere;
Algoritma PLICP
Girdi:
, ,
den oluşturulan parçalı doğru yüüzeyi,
0
repeat
,
’ye en yakın iki nokta
üçlüleri
tüm , ,
’dan aykırı değerleri temizle
:
|
:
,
,
:
(6)
:
5) Yeniden Örnekleme: Bu
B aşamada düşük ağırlıklı
parçacıklar yüksek ağırlıklı parrçacıklarla yer değiştirirler.
6) Harita Kestirimi: Her bir
b poz için
, karşılık
gelen harita tahmini
gezinngeye ve gözlem geçmişine
, : dayanarakk yeniden hesaplanır.
:
,
∑
,
’yi en küçükleyen
değerini bul
b
+1
until (max _iterasyon_sayısı) or (yakınsama)
Çıktı:
IV.
DENEYSEL
L SONUÇLAR
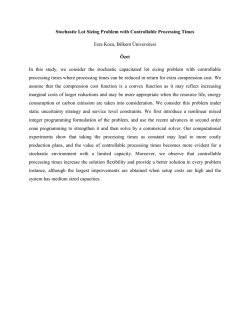
Deney sonuçları, robotun alanda bir tur gezdiği durum
için elde edilmiştir. Tüm yöntemler
y
için gezingeler
eşzamanlı olarak hesaplanmıştıır. Yer gerçeği gezingesi ise
gezinim bittikten sonra sayıssallaştırılmıştır. Gezingeler
hesaplanırken kullanılan bilggilerin çalışma frekansları
aynıdır. Şekil 3’de yer gerçeğğine karşılık, hız bilgisinin
kullanıldığı durumda elde edilen
e
kinematik gezinge
verilmiştir. Sadece hız bilgissinin kullanıldığı durumda
yerinde saymalar ve takılm
malardan dolayı bulunan
gezingenin yer gerçeğinden olddukça saptığı görülmektedir.
LSM yönteminde kinematik bilgisinin dahil
edilmesinde (LSM-K), ilk dönüşüm tahhmini olan
için
öteleme parametresi ( ) ilk durmunun kiinemetik model ile
belirlenmesi yaklaşımı kullanılır. Atalet
A
duyargası
bilgisinin dahil edilmesinde (LSM-A
A), ilk dönüşüm
tahmini olan
için rotasyon param
metresi (R θ ) ilk
durumunun atalet duyargası ile belirllenmesi yaklaşımı
kullanılır. Atalet duyargası ve kinematikk bilgisinin birlikte
dahil edilmesinde (LSM-AK), ilk dönüşüüm tahmini olan
için öteleme parametresi ( ) ve rotasyon tahmini (R θ ) ilk
durmunun kinemetik model ve atalet duuyargası ile birlikte
belirlenmesi yaklaşımı kullanılır.
Şekil 2. Kinematik tabannlı gezinge ve yer gerçeği.
508
2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU 2014)
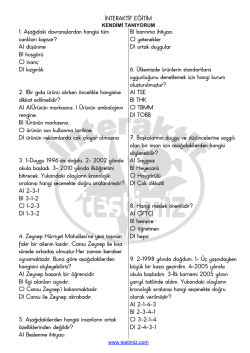
Şekil 4 ile LSM tabanlı gezzinge çıkarımları
verilmektedir.
LSM
tabanlı
geezinge
çıkarımı
yöntemlerinin, artımlı ve yerel tahminller yaptıkları için,
çevrimi tamamlayamadıkları gözlenmekttedir. LSM tabanlı
yöntemlerin dönüşlerde ve lazer ölçüm
münün değişmediği
düz koridorlarda dahi birbirlerindeen farklılaştıkları
gözlenmektedir.
Tablo 2 ile fark olan alan ile
i yer gerçeği alan oranları
verilmektedir. Tablodaki sonnuçlar incelendiğinde, en
başarılı gezinge çıkarımının %19,88 fark oranı ile
gMapping yöntemi ile elde eddildiği görülmektedir. LSM
tabanlı gezinge çıkarımlarındda ise kullanılan bilgiler
arttıkça daha iyi sonuçlar elde edildiği
e
gözlemlenmiştir.
Gezinge Çıkarım Yöntemi
gMapping
LSM-AK
LSM-K
LSM-A
LSM
Fark Oranı (% olarak)
19,88
31,98
33,17
34,40
74,91
Tablo 2. Gezingeler içinn alan fark oranları.
V.
SON
NUÇLAR
Bu çalışmada, tekerlek odoometrisi kullanmadan, lazer
mesafe ve atalet duyargalaarı kullanarak oluşturulan
gezingeler, SLAM tabanlı gMapping gezingesi ile
karşılaştırmalı olarak inceleenmiştir. Artımsal yerel
uygulamalar olan LSM tabaanlı gezingelerde çevrimin
tamamlanmadığı, buna rağmeen gMapping yönteminin,
ortam haritası ile gezinge oluşturduğu için çevrimi
kapatabildiği ve fark alan ölççüsü olarak en iyi sonucu
verdiği görülmüştür. Kullanıllan yöntemlerin yanı sıra
görsel odometri dahil edilereek duyarga birleştirme ile
gezinge tahmininin daha başarılı bir şekilde elde edilmesi
beklenmektedir.
Şekil 3. LSM tabanlı gezingeler ve yeer gerçeği.
Şekil 5’te gMapping tabanlı geziinge çıkarımı yer
gerçeği
ile
birlikte
verilmekteedir.
gMapping
uygulamasında parçacık adedi 10 olarrak kullanılmıştır.
gMapping ile oluşturulan gezinge, hariita bağımlı olarak
elde edilmekle birlikte, çevrimin baaşarılı bir şekilde
tamamlanabildiği görülmektedir.
KAYNA
AKÇA
[1]
[2]
Şekil 4. gMapping ve yer gerçeği gezzingeleri.
Görsel değerlendirmeler yanındda, elde edilen
gezingeler için, yer gerçeğine benzerrlik ölçütü olarak
kapsanan alan farkı oranı verilmiştirr. Gezinge kapalı
alanlarının yer gerçeğinden farkının yeer gerçeği alanına
bölünmesi ile bu ölçüt hesaplanmıştır. İddeal bir durum için,
gerçek eğri ile hesaplanan eğri birbirinne yaklaştıkça, bu
oranın sıfıra yaklaşması beklenmektediir. Şekil 6 ile söz
konusu alan farkları görsel olarak verilmiiştir.
[3]
[4]
[5]
[6]
(a)
(b)
(c)
[7]
(d)
(e)
[8]
(f)
Şekil 5. Alan farkları ölçüsü: (a) Yer Gerçeği, (b) LSM, (c) LSM-A, (d)
LSM-K, (e) LSM-AK, (f) gMappping.
[9]
509
Ganganath, N.; Leung, H., "M
Mobile robot localization using
odometry and kinect sensor,"" Emerging Signal Processing
Applications (ESPA), 2012 IEE
EE Int. Conf. on, pp.91,94, 12-14
Jan. 2012.
Censi, Andrea, "An ICP variannt using a point-to-line metric,"
Robotics and Automation, 2008. ICRA 2008. IEEE Int. Conf. on.,
pp.19,25, 19-23 May 2008.
Shu, L.; Xu, H.; Huang, M., "H
High-speed and accurate laser scan
matching using classified feeatures," Robotic and Sensors
Environments (ROSE), 2013 IEE
EE Int. Symp. on, pp.61,66, 21-23
Oct. 2013.
Grisetti, G.; Stachniss, C.; Burgaard, W., "Improved Techniques for
Grid Mapping With Rao-Blackw
wellized Particle Filters," Robotics,
IEEE Transactions on , 23(1):34--46, 2007.
Grisetti, G.; Stachniss, C.; Burggard, W., "Improving Grid-based
SLAM with Rao-Blackwellized Particle Filters by Adaptive
Proposals and Selective Resamppling," Robotics and Automation,
2005. ICRA 2005. Proc. of the
t
2005 IEEE Int. Conf. on ,
pp.2432,2437, 18-22 April 2005.
Kohlbrecher, S.; Von Stryk, O.;
O Meyer, J.; Klingauf, U., "A
flexible and scalable SLAM system with full 3D motion
estimation," Safety, Security, annd Rescue Robotics (SSRR), 2011
IEEE Int. Symp. on , pp.155,160, 2011.
Esenkanova, J.; Ilhan, H. O.; Yavvuz, S., "Pre-Mapping system with
single laser sensor based on gm
mapping algorithm," IJOEE: Int.
Journal of Electrical Energy, 1(2):97-101, 2013.
Dryanovski, I.; Valenti, R.G.; Jizzhong Xiao, "Fast visual odometry
and mapping from RGB-D data,"" Robotics and Automation (ICRA),
2013 IEEE Int. Conf. on , pp.2305, 2310, 6-10 May 2013.
P "Combining photometric and
Nowicki, M.; Skrzypezynski, P.,
depth data for lightweight and robust visual odometry," Mobile
Robots (ECMR), 2013 European Conf. on, pp.125,130, 25-27 Sept.
2013.
© Copyright 2026 Paperzz