Molla di torsione ad elica cilindrica Teoria Termini e simboli Azioni interne nel filo della molla Molle in serie Molle in parallelo Progetto 01 1. Descrizione 2. Vincoli geometrici 2.1 Limite sull'ingombro assiale 2.2 Limite spazio libero interno 2.3 Limite ingombro radiale 3.Dimensionamento della molla 4. Verifica di resistenza statica 4.1 sforzo tangenziale effettivo 4.2 verifica di resistenza statica 5.Verifica di resistenza a fatica 5.1 sollecitazioni a fatica 5.2 resistenza a fatica 6. Massa del filo della molla Progetto 02 1. Descrizione 2.Calcolo rigidezza del sistema 2 2 2 7 7 8 8 9 9 10 10 11 11 11 11 12 12 13 14 15 15 16 1 Teoria Termini e simboli De := diametro esterno di avvolgimento Di := diametro interno di avvolgimento D := diametro medio di avvolgimento d := diametro del filo c := rapporto di avvolgimento a := angolo di avvolgimento p := passo (costante) s := vuoto interspira i := numero di spire attive L := lunghezza di molla libera K := rigidezza della molla G := modulo di elasticità tangenziale del materiale r := densità del materiale del filo
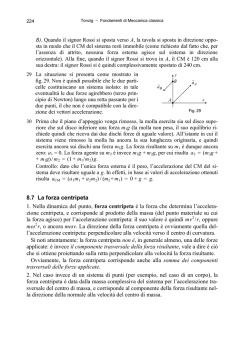
Azioni interne nel filo della molla Angolo di avvolgimento dell'elica media [rad] P
a: = arctan ( rD )
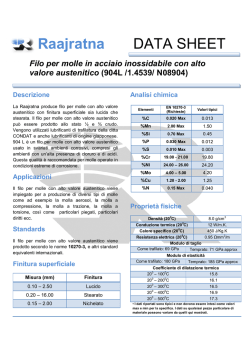
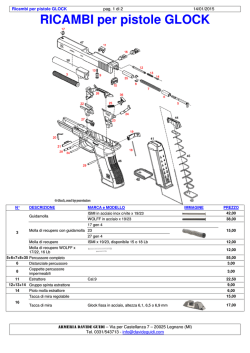
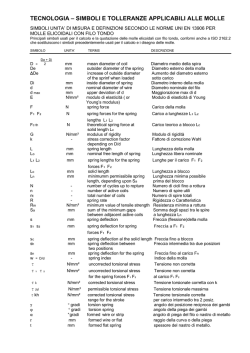
(1) Figura 1. Inclinazione elica media N.B.: L'angolo di inclinazione dell'elica media è l'arctan(passo/(PI*Dmedio)) e che risulta più piccolo dell'inclinazione misurata sul disegno in sezione pari a arctan(passo/Dmedio). 2 Come in Figura 2 e 3 sezioniamo in un punto qualunque il filo che costituisce la molla, ed evidenziamo le azioni interne, premesso che la forza che agisce sulla molla sia F. Azione assiale N = F sin (a) (2) Taglio T = F cos (a) (3) Momento torcente M t = FR cos (a) (4) Momento flettente M f = FR sin (a) (5) La teoria elementare si basa sulle seguenti ipotesi: 1.
2.
3.
a in generale piccolo ≤12° tipicamente a ≈ 5° ÷ 6° quindi sin(a)=0 e cos(a)=1 il filo ha curvatura piccola; rapporto di avvolgimento c tale che 3<c:=D/d<13 solitamente c>10 curvatura, ed è possibile schematizzare il filo come diritto gli effetti del taglio possono essere trascurati, in particolare per quanto riguarda la deformabilità quindi sono trascurabili gli effetti dovuti alla Quindi, secondo questa approssimazione, la molla è soggetta solo alla azione di torsione, costante lungo tutto il filo: M t = FR (6) sollecitazione tangenziale d
Mt
x max = J 2
p
16M t
rd 4
Jp =
" x max =
32
rd 3
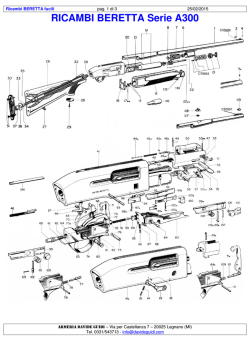
(7) 3 Figura 2. Complessivo molla cilindrica 4 Figura 3. Particolare ingrandito per visionare le azioni 5 angolo di avvolgimento (rotazione relativa tra due sezioni distanti L) {=
Mt L
32M t L
=
GJ p
Grd 4
(8) momento torcente rd 3
Mt =
x
16 max (9) caratteristica K: si calcola ugualiando il lavoro compiuto dalla forza F per una freccia f al lavoro elastico accumulato nel filo 1
1
Ff = M t {
2
2
(10) considerando che L = rDi (11) e che Mt=F⋅D/2 , sostituendo nella formula del lavoro e semplificando, si ottiene: Ff = M t
32M t L
Grd 4 (12) Ff =
D 2
) L
2
Grd 4
32 (F
(13) relazione tra la freccia e la forza applicata 8D 2 L
8D 2 rDi
8D 3 i
f=
F=
F=
F
Grd 4
Grd 4
Gd 4 (14) relazione tra la freccia e la taumax rD 2 i
f=
x
Gd max 6 (15) caratteristica F
Gd 4
K=
=
f
8D 3 (16) numero di spire i=
Gd
8Kc 3
(17) Molle in serie La forza è uguale per tutte le molle, mentre la freccia f è la somma delle n frecce; dunque f = f1 + f2 + f3 + ... = Forza $ (1/K 1 + 1/K 2 + 1/K 3 + ...) = F/K 1
K=
1/K 1 + 1/K 2 + 1/K 3 + ... (18) Molle in parallelo La freccia è uguale per le n molle, la forza complessiva F è la somma delle n forze; dunque: F = F1 + F2 + F3 + ... = f (K 1 + K 2 + K 3 + ...) = fK K = K 1 + K 2 + K 3 + ... (19) 7 Progetto 01 1. Descrizione La sospensione di un veicolo è realizzata tramite una molla di torsione ad elica cilindrica a passo costante accoppiata coassialmente ad un ammortizzazore a gas. La molla di questa sospensione deve avere una rigidezza assiale K ed una freccia a pacco fp assegnate. Occorre lasciare sufficiente spazio all'interno della molla per l'inserimento dell'ammortizzatore; l'ingombro assiale e radiale deve essere il più possibile contenuto; per raggiungere questi obbiettivi, si dovrà scegliere il materiale più adatto tra quelli proposti in Tab 1. Si richiede di effettuare: 1. il dimensionamento della molla rispettando il vincolo funzionale della rigidezza ed i vincoli geometrici sugli ingombri 2. la verifica di resistenza statica della molla con coefficiente di sicurezza minimo pari a 1.25 per una freccia f0=0.8fp 3. la verifica a fatica della molla a carico medio costante con un coefficiente di sicurezza minimo pari a 1.5 ed assumendo che il limite di fatica a torsione alternata valga il 28÷30% del carico di rottura a trazione e che il ciclo di fatica da considerare sia caratterizzato dai seguenti valori della freccia fmax=0.75fp e fmin=0.45fp 4. il calcolo della massa della molla e la ricerca di soluzioni, chre nel rispetto dei vincoli progettuali, comportino una riduzione della massa stessa. Dati 1. Rigidezza assiale K = 70 N/mm (caratteristica della molla) 2. Freccia a pacco fp = 68 mm 3. Diametro interno minimo Di min = 40 mm 4. Diametro esterno massimo De max = 90 mm 5. Lunghezza libera massima Lmax = 215 mm Materiale acciai per molle: 55Si7 UNI3545:1980 Rm = 1350 MPa, Rp0.2 = 1160 MPa 60SiCr8 UNI3545:1980 Rm = 1450 MPa, Rp0.2 = 1250 MPa 50CrV4 UNI3545:1980 Rm = 1330 MPa, Rp0.2 = 1140 MPa Tab 1 Scelgo acciaio 55Si7 Coeff. sicurezza eta=1.5 Rp0.2=1160 MPa 8 Sollecitazione tangenziale ammissibile R p 0.2
x lim
1160
=
=
= 446.48 MPa
x amm = h
3$h
3 $ 1. 5
(20) Condizione di resistenza 8
c
x max = S r Kf p XS 2 X # x amm
d
(21) Diametro minimodel filo 8Kf p
d 2 = rx amm c
(22) 2. Vincoli geometrici 2.1 Limite sull'ingombro assiale La lunghezza libera deve essere inferiore al valore limite Lmax. Dato che L # L max (23) L , ip = i (s + d) = f p + id (24) sostituendo i dalla (18) si ha: Gd 2
# L max - f p
8Kc 3
(25) per cui il limite sull'ingombro assiale è dato da: Gf p
c $ c min ax =
rx ammQL max - fpV
(26) si ottiene il valore di c_min_ax=5.1317 9 2.2 Limite spazio libero interno La limitazione sullo spazio libero interno impone dhe il diametro di avvolgimento interno Di sia superiore ad un valore minimo Dimin D i $ D i min (27) essendo il diametro interno della molla D i = D - d = d (c - 1) (28) inserendo il valore di d fornito dalla 22 si ottiene 2
D
r
i min
Y $0
c - 2c + c - T
x
8Kf p amm
3
2
(29) si sostituiscono i valori numerici in questa equazione di 3° grado e si ottiene una radice reale (le altre due sono complesse) che fornisce il valore di c_min_int = 4.5845 per cui deve essere c $ c min int (30) 2.3 Limite ingombro radiale La limitazione sull'ingombro radiale impone che il diametro di avvolgimento esterno De sia inferiore ad un valore limite Demax D e # D e max (31) D e = D + d = d Qc + 1V essendo il diametro esterno della molla (32) 2
r
D
i max
Y #0
c + 2c + c - T
x
8Kf p amm
3
2
(33) si sostituiscono i valori numerici in questa equazione di 3° grado e si ottiene una radice reale (le altre due sono complesse) che fornisce il valore di c_max_ext = 6.0315 per cui deve essere c # c max ext (34) pertanto deve essere 5.137 # c # 6.0315 (35) scelgo C = 5.5 10 3.Dimensionamento della molla dalla 22 calcolo il valore di d, essendo fissato c, e ottengo d= 12.223 mm Arrotondo questo valore per facilitare la reperibilità sul mercato, e assumo d=12.5 mm mentre il valore esatto di c dalla 22 diventa C= 5.7525 Scelto c e d posso calcolare le altre grandezze geometriche che, applicando le formule esposte nel paragrafo Teoria, risultano essere: Dm 71.907 mm i 9.3807 s 7.2489 mm p 19.747 mm a 5.048° gradi sessag. De 84.062 mm Di 59.062 mm L 185.24 mm Tab. 2 4. Verifica di resistenza statica 4.1 sforzo tangenziale effettivo x' = k 2 x Mt (36) dove K2 tiene conto degli effetti della curvatura e del taglio Formula di Wahl k2 =
4c - 1
0.615
+
c 4 ( c - 1)
(37) 4.2 verifica di resistenza statica f0 = 0.8f p (38) F0 = Kf0 = 0.8Kf p (39) 11 x Mt =
16M t
16F0 D
8Kf0 c
8
c
=
=
3
3
2 = 0.8 r Kf p 2
2 rd
d rd
rd
(40) x' = k 2 x Mt # x amm (41) si sostituiscono i valori numerici e si ottiene tau'=436.4 N < tau amm=446.48 dalla 20. Quindi la condizione di resistenza statica è verificata. 5.Verifica di resistenza a fatica 5.1 sollecitazioni a fatica Il carico applicato alla molla è oscillante tale da conprimere (freccia) la molla da un valore minimo ad un valore max fmax = 0.75f p
fmin = 0.45f p Introduciamo un coeff. di intaglio pari a k1 k1 = 1 +
(42) 2
3c
la sollecitazione tangenziale, come la freccia, è funzione del tempo t 8Kf p
8Kfmax
0
75
=
.
k
c
T
Y
1
rd 2
rd 2
8Kf p
8Kfmin
0
45
k
c
x min = k 1 c
=
.
T
Y
1
rd 2
rd 2 x max = k 1 c
+ x min
2
x
-x
= max min
2
x med =
x alt
(43) x max
(44) 12 si inseriscono i valori numerici e si ottiene tau_max 358.78 Nmm^-‐2 tau_min 215.27 Nmm^-‐2 tau_med 287.03 Nmm^-‐2 tau_alt 71.75 Tab.3 Nmm^-‐2 5.2 resistenza a fatica Affinchè la verifica sia soddisfatta occorre che la sollecitazione tangenziale sia minore del limite di fatica, ove occorre tener presente che fino allo snervamento la tau_media non influenza la tau_alt. (rif. Costr. Macch. 1, Davoli, pag. 152). x alt #
x' FAt
h (45) Coeff. di intaglio: k1 dalla 42; k2 dalla formula di Wahl ; kc=k2/k1 Il coeff. di intaglio a fatica è dato da k f = Q1 - qV k c b k c (46) Dalle prove sul materiale si ha x FAt = 0.28 ' 0.30R m (47) in questo caso Rm=1350 MPa da Tab. 1. Consideriamo il coeff. di forma b2=7 e il coeff. di finitura sup. b3=9 x' FAt = x FAt
(48) si sostituiscono i valori numerici e si ottiene b2 b3
kf
x' FAt
-2
139
.
23
Nmm
=
h
questo valore è maggiore di tau_alt=71.75 come da tabella 3 e quindi la verifica, come dalla 45, è soddisfatta. 13 6. Massa del filo della molla M = tV (49) rho := 7800/10^9 [kg/mm^3] densità del materiale del filo della molla V:= A⋅L volume del filo della molla A:= PI⋅d^4/4 area della sezione trasversale del filo della molla d:= diametro della sezione trasversale del filo della molla L≈P⋅ID⋅i rd 4
r2 3
M = t 4 rDi = t 4 id c
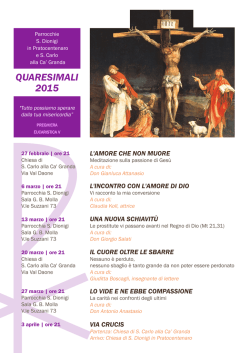
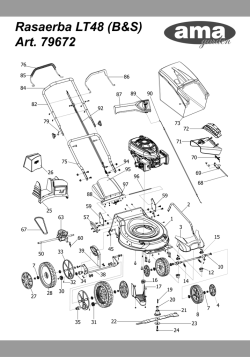
(50) sostituendo i valori numerici, ottiene M=1.9394 Kg 14 Progetto 02 1. Descrizione Si debba realizzare un basamento sospeso antivibrante di una macchina nella quale si origina una forza perturbante sinusoidale, di intensità F0 e di frequenza n, diretta verticalmente. Il basamento, costituito da un piastrone cui è vincolata rigidamente la macchina, è appoggiato su quattro molle uguali. L'insieme in Figura 4 deve essere progettato in modo tale che che l'intensità della forza trasmessa al terreno sia una frazione della forza perturbante e che la semiampiezza del moto vibratorio sia x0. Si chiede di determinare la caratteristica delle molle e la massa del basamento in grado di soddisfare i requisiti di progetto. Figura 4 Dati intensità forza perturbatrice F0=1500 N frequenza della perturbazione n=750 cicli/1' (cioè 750/60=12.5 Hz) ampiezza forza forza trasmessa al terreno Ft0=F0/15 semiampiezza del moto vibratorio x0=0.5 mm 15 2.Calcolo rigidezza del sistema Ai fini del calcolo, il Sistema è modellabile come in Figura 5 Figura 5 Le molle sono in serie, quindi la rigidezza del sistema è dato dalla somma delle rigidezze delle singole molle, tra loro uguali. Indico con K questa rigidezza complessiva. 16 Figura 6 La forza complessiva che agisce sulle quattro molle è data da Ft=F0/15 Figura 7 La figura 7 indica lo squilibrio richiesto per le forze agenti sulla massa sospesa. 17 Lo squilibrio di questo sistema (che è la forza trasmessa al terreno) non deve superare Ft0=F0/15 Dalla Figura 7 possiamo scrivere l'equilibrio del sistema all'istante t ove le azioni in gioco sono solo verticali, secondo l'asse x mxp + Kx = F0 cos Q~t V (51) Questa è l'equazione di equilibrio di un sistema elastico eccitato ad 1 grado di libertà, dove ~=
2rn
60
(52) L'omogenea associata alla (51) rappresenta il modo di vibrare libero del sistema mxp + Kx = 0 (53) X omog.ass. Q t V = A sin (Xt) + B cos (Xt) La funzione integrale della omogenea associata è (54) Nel caso in esame, la XOA ha valore max per x=0,t=0 quindi è corretto non considerare la funz. sin(). L'integrale della omogenea associata diventa X omog.ass. Q t V = B cos (Xt) (55) L'integrale particolare in situazione reale a regime è x Q t V = X 0 cos Q~t V
xo Q t V =- ~X 0 sin Q~t V
xp Q t V =- ~ 2 X 0 cos Q~t V (56) sostituisco nella (51) - m~ 2 X 0 cos Q~t V + KX 0 cos Q~t V = F0 cos Q~t V semplifico il coseno e divido entrambi i membri per m e ottengo F
K
- ~ 2 X 0 + m X 0 = m0
(57) 18 risolvo la 57 rispetto a X0 X0 =
F0
K
mS m - ~ 2 X
(58) se pongo m=
K
X2
(59) (Ω potrà poi essere definita come pulsazione del sistema) ottengo X0 =
F0 /K
2
~
T1 - 2 Y
X (60) ma X 0 K = Ft 0 = F0/15 (61) sostituendo nella (60) ottengo Ft 0 =
F0
2
~
T1 - 2 Y
X (62) sotituendo i valori numerici e semplificando F0 1
15 =
~2 Y
1
2
2
2
T
"
1
2 = 15 " X - ~ = 15X
2
X
T1 - ~2 Y
X
2
~
14X 2 = ~ 2 " X = 14
(63) 19 ~=
2 rn
2r750
=
= 78.54
60
60
(64) quindi X = 21 Hz (65) calcolo la rigidezza totale delle quattro molle Ft
1500
K = X0 =
= 200 N/mm
15 $ 0.5
0
(66) quindi la massa del basamento sarà K
K
X 2 = m " m = 2 = 0.4535 N mm -1 sec 2 = 0.4535 * 1000 kg = 453 kg
X
riprendiamo la (60) e sostituiamo i valori numerici X0 =
F0 /K
2
T1 - ~2 Y
X (60) La funzione X0(Ω) tende all'infinito per Ω → ω cioè Ω è la frequenza propria di risonanza del sistema. 20
© Copyright 2026 Paperzz