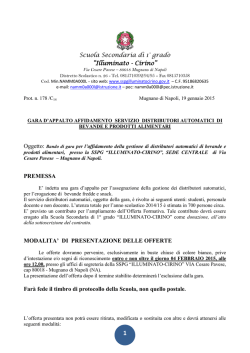
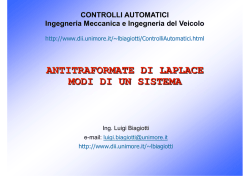
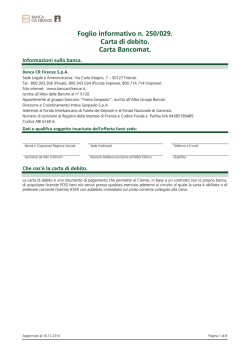
Controlli Automatici - Lezione 1 Luigi Iannelli 3 marzo 2014 Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Outline Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Luigi Iannelli Controlli Automatici - Lezione 1 Sistemi di controllo Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Informazioni pratiche I I I I Docente: ing. Luigi Iannelli e-mail: [email protected] Telefono: 0824 30 5515 Cellulare: 349 60 99 962 Studio Dip. Ingegneria, 2◦ piano Assistenza e tutorato: ing. Gianluca Angelone e-mail: [email protected] Telefono: 0824 30 5560 studio San Vittorino, 1◦ piano (laboratori GRACE) Orario lezioni: Luned`ı: ore 12-14 aula D1 Mercoled`ı: ore 14-16 aula G12 Orario ricevimento: Docente: gioved`ı ore 11.00-13.00 Assistente: gioved`ı ore 15.30-17.30 Luigi Iannelli Controlli Automatici - Lezione 1 Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Materiale didattico I I I I Testo di riferimento: P. Bolzern, R. Scattolini, N. Schiavoni, “Fondamenti di Controlli Automatici”, McGraw-Hill Italia, terza edizione, 2008. Slides lezioni Altro materiale didattico fornito a lezione Testi di consultazione: I I I I G.F. Franklin, J.D. Powell, A. Emami-Naeini, “Feedback Control of Dynamic Systems”, Prentice Hall, 6th ed., 2009. Chi-Tsong, Chen, “Analog and Digital Control System Design”, Saunders College Publihing, 1993. A. Cavallo, R. Setola, F. Vasca, “La Nuova Guida a Matlab, Simulink e Control Toolbox”, Liguori Editore, 2002 Sito web: Luigi Iannelli Controlli Automatici - Lezione 1 www.ing.unisannio.it/iannelli Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Informazioni sul corso I I Prerequisiti propedeuticit`a obbligatoria: “Sistemi dinamici”. Obiettivi: I I Introdurre gli studenti ai problemi di controllo dei sistemi dinamici tempo-continuo e al concetto di retroazione applicata ai sistemi lineari tempo-invarianti con un ingresso ed una uscita. Metodi di insegnamento e valutazione I I Metodo di insegnamento: Lezioni orali e laboratorio Metodo di valutazione: Esame scritto e orali separati L’orale prevede anche un esercizio al calcolatore (Matlab/Simulink) Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Contenuti del corso, I I Problemi di controllo I I I I Architettura dei sistemi di controllo I I I I I I I Generalit`a Specifiche statiche Specifiche dinamiche Compensazione del disturbo Compensazione del riferimento Relazioni tra guadagno del controllore e specifiche statiche Errore statico nullo: azione integrale nella funzione di anello Robustezza ai disturbi a gradino e variazioni parametriche Principio del modello interno Progetto del controllore: soddisfacimento specifiche statiche e dinamiche sul piano complesso. Posizione dei poli a ciclo chiuso. Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Contenuti del corso, II I Luogo delle radici I I Diagramma di Nyquist I I I I Margine di ampiezza Margine di fase Specifiche in frequenza Criterio di Bode I I I Sintesi con il luogo delle radici Sintesi con il criterio di Bode Reti stabilizzatrici Regolatori PID Luigi Iannelli Controlli Automatici - Lezione 1 Sistemi di controllo Schemi di controllo Informazioni generali Problemi di controllo Outline Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Luigi Iannelli Controlli Automatici - Lezione 1 Sistemi di controllo Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Processo e controllo I I problemi di controllo consistono nell’imporre un funzionamento desiderato ad un assegnato processo I Il processo (o sistema sotto controllo) `e l’oggetto (impianto, macchina, fenomeno fisico, ecc.) sul quale `e posto il problema di controllo I Il funzionamento desiderato `e espresso dalla richiesta che alcune variabili del processo (variabili controllate) abbiano un andamento temporale prefissato (segnali di riferimento) I Il problema di controllo si pu`o sintetizzare come la richiesta variabile controllata = riferimento Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Variabili principali I Occorre poter condizionare la variabile controllata agendo sul processo tramite altre variabili manipolabili dette variabili di controllo I Se il riferimento `e costante, viene anche detto set-point ed il relativo problema di controllo si dice anche problema di regolazione I Possono esistere altre variabili non manipolabili che influenzano il comportamento del processo (disturbi) Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Sistemi di controllo Problema di controllo Processo Problema di controllo Funzionamento desiderato Luigi Iannelli Controlli Automatici - Lezione 1 Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Esempi I Guida di un autoveicolo lungo una traiettoria e con velocit`a assegnate I Impianto di climatizzazione. I Impianto industriale che regola il livello di acqua in un serbatoio. I Azienda manifatturiera che settimanalmente decide le quantit`a di semilavorati da acquistare per le scorte di magazzino. Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Goodwin, Graebe, Salgado ©, Prentice Hall 2000 Chapter 1 Figure 1.1: Watt’s fly ball governor Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Chapter 1 Problemi di controllo Sistemi di controllo Goodwin, Graebe, Salgado ©, Prentice Hall 2000 This photograph shows a flyball governor used on a steam engine in a cotton factory near Manchester in the United Kingdom. Of course, Manchester was at the centre of the industrial revolution. Actually, this cotton factory is still running today. Luigi Iannelli Controlli Automatici - Lezione 1 Schemi di controllo Informazioni generali Chapter 1 Problemi di controllo Sistemi di controllo Goodwin, Graebe, Salgado ©, Prentice Hall 2000 This flyball governor is in the same cotton factory in Manchester. However, this particular governor was used to regulate the speed of a water wheel driven by the flow of the river. The governor is quite large as can be gauged by the outline of the door frame behind the governor. Luigi Iannelli Controlli Automatici - Lezione 1 Schemi di controllo Informazioni generali Problemi di controllo Outline Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Luigi Iannelli Controlli Automatici - Lezione 1 Sistemi di controllo Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Definizioni fondamentali I La determinazione delle variabili di controllo `e compiuta da un dispositivo che `e detto controllore (o regolatore) I Il controllore pu`o essere naturale o artificiale I I controllori artificiali possono essere manuali o automatici Esempi di controllori naturali: I I I I I I regolare la pressione arteriosa regolare la temperatura corporea regolare il livello di glucosio nel sangue ... Esempi di controllori artificiali I I Guida veicolo (manuale) Cruise control (automatico) Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Sistemi di controllo Sistema di controllo Processo Sistema di controllo Controllore Luigi Iannelli Controlli Automatici - Lezione 1 Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Specifiche di progetto I I La perfetta identit`a tra variabile controllata e segnale di riferimento `e spesso un obiettivo ideale In pratica si richiede variabile controllata ≈ segnale di riferimento I Questo equivale a richiedere sufficientemente piccolo l’errore del sistema di controllo: e(t) , r (t) − y (t) ≈ 0 Le specifiche sono definite sull’errore . . . . . . ma anche sulla variabile di controllo: moderazione del controllo: |u(t)| ≤ M Luigi Iannelli Controlli Automatici - Lezione 1 Informazioni generali Problemi di controllo Outline Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Luigi Iannelli Controlli Automatici - Lezione 1 Sistemi di controllo Schemi di controllo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Controllo in anello aperto I Ovviamente il controllore necessita di conoscere il riferimento I A volte pu`o anche avere informazioni sui disturbi I Quando il controllore possiede informazioni solo sul riferimento ed eventualmente sul disturbo, si dice in anello aperto o a ciclo aperto o ad azione diretta (feedforward) Segnale di riferimento Luigi Iannelli Controlli Automatici - Lezione 1 Controllore Disturbo Variabile di Variabile controllo controllata Processo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Controllo in anello chiuso I A volte il controllore ha a disposizione informazioni (misura) sulla variabile controllata I Quando il controllore decide l’andamento della variabile di controllo in dipendenza della variabile controllata, si dice in anello chiuso o a ciclo chiuso o in retroazione (feedback) Segnale di riferimento Luigi Iannelli Controlli Automatici - Lezione 1 Controllore Disturbo Variabile di Variabile controllo controllata Processo Informazioni generali Problemi di controllo Sistemi di controllo Schemi di controllo Altri schemi in feedback Segnale di riferimento Controllore Disturbo Variabile di Variabile controllo controllata Processo Variabile misurabile Compensatore Segnale di riferimento + Errore Controllore in retroazione + Disturbo Variabile di Variabile controllo controllata Processo Variabile misurabile Luigi Iannelli Controlli Automatici - Lezione 1 Riferimenti P. Bolzern, R. Scattolini, N. Schiavoni. Fondamenti di Controlli Automatici. McGraw-Hill Italia, 3rd ed., 2008. (per questa lezione: par. 1.1, 1.2 e 1.3) G.F. Franklin, J.D. Powell, A. Emami-Naeini. Feedback Control of Dynamic Systems. Prentice Hall, 6th ed., 2009. Chi-Tsong Chen. Analog and Digital Control System Design. Saunders College Publihing, 1993. A. Cavallo, R. Setola, F. Vasca, La Nuova Guida a Matlab, Simulink e Control Toolbox. Liguori Editore, 2002. Luigi Iannelli Controlli Automatici - Lezione 1
© Copyright 2026 Paperzz