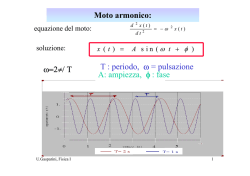
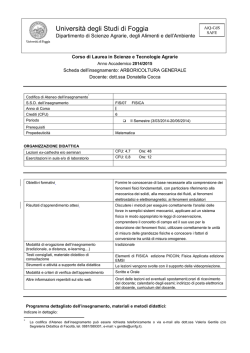
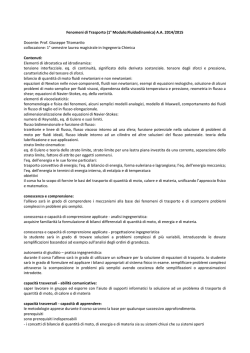
Principi di Fisica PER INDIRIZZO BIOMEDICO E FARMACEUTICO II EDIZIONE Ferdinando Borsa Università degli Studi di Pavia Alessandro Lascialfari Università degli Studi di Milano F. Borsa - A. Lascialfari PRINCIPI DI FISICA per indirizzo biomedico e farmaceutico II edizione Copyright © 2014, EdiSES s.r.l. - Napoli 9 8 2018 7 6 2017 5 4 2016 3 2 2015 1 0 2014 Le cifre sulla destra indicano il numero e l’anno dell’ultima ristampa effettuata A norma di legge è vietata la riproduzione, anche parziale, del presente volume o di parte di esso con qualsiasi mezzo. L’Editore Fotocomposizione: EdiSES s.r.l. – Napoli Stampato presso la Tipolitografia Sograte S.r.l. Zona Ind. Regnano - Città di Castello (PG) per conto della EdiSES – Piazza Dante, 89 – Napoli http//www.edises.it e-mail: info@edises. it ISBN 978 88 7959 816 3 Prefazione Il presente testo è il risultato di una lunga esperienza di insegnamento della Fisica, risalente al 1970, che si è estesa in sequenza ai corsi di Laurea di Medicina, Biologia, Biotecnologia, Chimica e Tecnologie Farmaceutiche e Farmacia delle Università di Pavia e di Milano, e che ha attraversato le numerose riforme dei corsi di studio presso i diversi corsi di Laurea. Il principio ispiratore del nostro insegnamento è stato fin dall’inizio la convinzione che la funzione della Fisica negli studi biomedici e farmaceutici debba essere sopratutto di carattere formativo e metodologico. Per realizzare questo abbiamo ritenuto utile operare una certa integrazione e armonizzazione degli argomenti di Fisica con altri argomenti facenti parte più specificatamente dei curricula degli studi biomedici e farmaceutici. Si è così scelto di inserire nei capitoli in cui vengono presentati i concetti fondamentali della Fisica anche alcune semplici e schematiche applicazioni di questi concetti e leggi fisiche ad argomenti di interesse biomedico. Sono stati anche inseriti tre capitoli interamente dedicati a queste applicazioni: Termodinamica nei sistemi biologici, Strumenti ottici e I potenziali bioelettrici. Queste applicazioni non sono svolte con la pretesa di essere complete ed esaurienti, ma piuttosto con l’intento di fornire esempi di una trattazione scientificamente rigorosa, anche se necessariamente ridotta a una forma schematica ed essenziale, di alcuni affascinanti problemi che si incontrano in biomedicina e farmacia. Il secondo principio ispiratore è stato quello di cercare di trattare gli argomenti nel modo più semplice e agile possibile, anche a costo di omettere temi importanti in Fisica ma da noi ritenuti non essenziali in un corso propedeutico per studenti di discipline biomediche e farmaceutiche. Tuttavia, per mantenere un minimo di rigore nella trattazione, si è fatto uso delle nozioni di Analisi matematica compreso il calcolo differenziale e integrale, illustrando comunque alcune delle derivazioni delle espressioni matematiche, per renderle più comprensibili da un punto di vista fisico. Per finire desideriamo ringraziare colleghi e amici che in tutti questi anni di collaborazione scientifica e didattica hanno contribuito con discussioni, consigli e suggerimenti alla realizzazione di questo testo. Pavia, Marzo 2014 Ferdinando Borsa Emeritus Professor of Physics, Iowa State University, Ames, Iowa, USA Già ordinario di Fisica Generale all’Università di Pavia, Pavia, Italy Alessandro Lascialfari Professore Associato di Fisica Generale Dipartimento di Fisica, Università degli studi di Milano, Milano, Italy Materiale di supporto per i docenti I docenti che utilizzano il testo a scopo didattico possono scaricare dal sito www.edises.it, previa registrazione all’area docenti, le immagini del libro in formato PowerPoint. Indice generale 1 1.1 Le grandezze fisiche e la loro misura Le grandezze fisiche 4 1 4.1 Le forze 55 3 4.2 Il momento di una forza 55 4.3 Condizioni di equilibrio traslazionale e rotazionale 56 4.4 Composizione di forze parallele: il baricento 58 4.5 Alcuni esempi di statica del corpo umano 60 1.2 Dimensioni di una grandezza 1.3 Valori approssimati di lunghezza, massa, tempo. Sistemi di unità di misura e conversioni 4 Quantità scalari e quantità vettoriali 8 1.4 1.5 Operazioni sulle quantità vettoriali 10 1.6 Calcoli e cifre significative 13 ▶ Esercizi e problemi 14 2 Cinematica 2.1 Introduzione alla meccanica 15 2.2 Posizione, velocità e accelerazione 15 2.3 Moto rettilineo uniforme e uniformemente accelerato 19 2.4 Moto circolare uniforme e non uniforme 25 2.5 Moto armonico 28 ▶ Esercizi e problemi 29 3 Statica Dinamica 3.1 Le forze 31 3.2 Le leggi della dinamica 32 3.3 La forza di gravità 37 3.4 La forza di attrito 38 3.5 Massa, peso e densità 41 3.6 La forza di attrito viscoso e la sedimentazione 42 3.7 La forza centrifuga e la centrifugazione 44 3.8 Esempi di moto armonico 46 3.9 Cenni di dinamica del corpo rigido 50 ▶ Esercizi e problemi 53 5 Lavoro, energia e potenza 5.1 Forze e campi di forze 65 5.2 Lavoro ed energia 67 5.3 Energia cinetica e teorema dell’energia cinetica 72 5.4 Energia potenziale e forze conservative 73 5.5 Conservazione dell’energia meccanica 75 5.6 Energia potenziale e forze: condizioni di equilibrio di un sistema meccanico 80 5.7 Potenza e rendimento 82 5.8 Lavoro e potenza muscolare 83 ▶ Esercizi e problemi 87 6 Statica e dinamica dei fluidi 6.1 Equilibrio di un fluido 89 6.2 Misura della pressione 93 6.3 Tensione superficiale 94 6.4 Fenomeni di capillarità 95 6.5 Dinamica dei fluidi perfetti 6.6 Regime laminare e regime turbolento 102 6.7 Idrodinamica della circolazione del sangue 105 Lavoro e potenza cardiaca 108 6.8 96 VI Indice generale 6.9 Viscosità del sangue 111 6.10 Formula di Laplace ed equilibrio dei vasi sanguigni 114 ▶ Esercizi e problemi 117 7 I gas e le soluzioni 9 Termodinamica nei sistemi biologici 9.1 Introduzione 175 9.2 Meccanismi di trasmissione del calore 175 9.3 Principi della termodinamica e fisiologia 179 9.4 Metabolismo del corpo umano 181 9.5 Metabolismo basale e dimensioni degli esseri viventi 184 9.6 Termoregolazione degli animali a sangue caldo 185 9.7 Entropia e vita 188 ▶ Esercizi e problemi 189 10 Onde meccaniche e acustica 7.1 Introduzione 119 7.2 Leggi dei gas perfetti 120 7.3 Leggi dei gas reali 122 7.4 Pressione parziale 125 7.5 Le soluzioni 126 7.6 Diffusione 127 7.7 Osmosi e pressione osmotica 129 7.8 Lavoro osmotico e potenziale chimico in soluzioni diluite 132 7.9 Potenziale elettrochimico ed equilibrio di Donnan-Gibbs 133 10.1 Perturbazioni e modello ondulatorio 191 Fenomeni osmotici e diffusione di gas nell’organismo umano 10.2 Legge di propagazione delle onde 194 135 10.3 Interferenza delle onde 198 7.11 Meccanica della respirazione 139 10.4 Onde stazionarie 201 7.12 Equilibrio meccanico degli alveoli 142 10.5 Il suono 203 ▶ Esercizi e problemi 144 10.6 I caratteri del suono 203 10.7 Cenni sulla fisiologia dell’udito 205 11 Ottica 7.10 8 Termologia e termodinamica 8.1 Sistema e stato termodinamico 147 11.1 Natura della luce. Principio di Huygens 209 8.2 Trasformazioni termodinamiche 148 11.2 Leggi della riflessione e rifrazione 211 8.3 Il lavoro in termodinamica 150 11.3 La dispersione della luce e il prisma 213 8.4 Calore e temperatura. Principio zero 151 11.4 Il diottro 214 8.5 Energia interna e primo principio della termodinamica 11.5 Le lenti sottili 216 153 11.6 L’interferenza della luce 219 8.6 Misura della temperatura 156 11.7 La diffrazione della luce 222 8.7 Capacità termica e calori specifici 158 11.8 8.8 Trasformazioni di stato e calori latenti 160 Funzionamento dell’occhio come sistema ottico centrato 224 8.9 Secondo principio della termodinamica 163 11.9 Acuità visiva 226 8.10 Cenni sull’entalpia, sull’entropia e sull’energia libera 168 11.10 Difetti di convergenza e lenti correttive 228 173 11.11 Visione cromatica 230 ▶ Esercizi e problemi ▶ Esercizi e problemi 232 Indice generale VII 12 12.1 Strumenti ottici Microscopio semplice e composto e relativo ingrandimento 235 12.2 Il potere risolutivo del microscopio 239 12.3 Microscopio a contrasto di fase e microscopio polarizzatore 241 ▶ Esercizi e problemi 244 13 Elettromagnetismo 13.1 Introduzione 245 13.2 La carica elettrica 245 13.3 La legge di Coulomb. Principio di sovrapposizione 247 13.4 Il campo elettrico. Linee di campo 249 13.5 Flusso di campo elettrico. Teorema di Gauss 254 13.6 Energia potenziale elettrica e potenziale elettrico 258 13.7 Potenziale di dipolo elettrico 261 13.8 Conduttori e isolanti. I condensatori 262 13.9 La corrente elettrica continua 269 13.19 Induzione elettromagnetica 295 13.20 Coefficiente di autoinduzione. Circuito R-L 297 13.21 Carica e scarica di un condensatore. Circuito R-C 299 ▶ Esercizi e problemi 14 Materia e radiazione 14.1 Spettro delle onde elettromagnetiche 303 14.2 Cenni sulla struttura atomica e sulla teoria dei quanti 305 14.3 Assorbimento ed emissione delle onde elettromagnetiche 308 14.4 Raggi ultravioletti 311 14.5 I raggi X e i principi della radiologia 312 14.6 Struttura dei nuclei. Isotopi naturali 314 14.7 Radiazioni α, β e γ. Radioattività 316 14.8 Legge di decadimento radioattivo 319 14.9 Effetto biologico delle radiazioni ionizzanti. Dosimetria 320 14.10 Cenni di medicina nucleare 300 322 13.10 Resistenza elettrica e legge di Ohm 270 15 I potenziali bioelettrici 13.11 Forza elettromotrice e circuiti in corrente continua 274 15.1 Generalità sui potenziali biolettrici 325 13.12 Effetto termico della corrente 280 15.2 Potenziale di riposo della membrana 327 13.13 Conduttori elettrolitici. Elettrolisi 280 15.3 13.14 Elettroforesi 283 Condizioni di equilibrio ed equazione di Nernst 330 13.15 Il campo magnetico 284 15.4 Pompa sodio-potassio 333 15.5 Equilibrio di Donnan-Gibbs e potenziale di membrana 336 15.6 Proprietà di cavo dell’assone 336 15.7 Potenziale d’azione: generazione e propagazione 342 13.16 La forza di Lorentz e il moto di una particella carica in un campo magnetico uniforme 289 13.17 Campo magnetico generato da un solenoide 292 13.18 Teorema di Ampere 293 VIII Indice generale Appendici A Richiami di matematica A.1 Potenze e logaritmi 347 A.2 Funzioni 348 B.4 A.3 Equazioni algebriche e sistemi di equazioni 353 A.4 Trigonometria 355 B.5 B.6 Curva di distribuzione normale o di Gauss Curva di distribuzione degli errori di misura Probabilità e frequenza Correlazione semplice A.5 Simboli e costanti matematiche 357 C Costanti fisiche e unità di misura 366 B Cenni di statistica e teoria dell’errore B.1 B.2 Curva di distribuzione delle frequenze 358 Valor medio e deviazione standard 360 D Soluzione di alcuni problemi 366 B.3 Indice analitico 361 363 363 364 381 3 DINAMICA Sommario 3.1 Le forze 3.2 Le leggi della dinamica 3.3 La forza di gravità 3.1 Le forze Al concetto generale di forza si perviene mediante un processo di astrazione partendo dall’idea intuitiva di sforzo muscolare. L’osservazione personale mostra che, ogni volta che si interviene su un oggetto mediante uno sforzo, l’oggetto si mette in movimento, se libero, oppure si deforma, se vincolato. E se l’oggetto è in moto, la sua velocità risulta alterata nel valore o nella direzione o in entrambi. Si ritiene pertanto che una forza, di qualsivoglia origine o natura, agisca ogni volta che si assiste ad un cambiamento dello stato di moto di un corpo o ad una deformazione del corpo stesso. Va sottolineato che alla parola forza si preferisce spesso il termine interazione per rimarcare la natura di questa grandezza fisica che ha la sua origine proprio nell’insorgere di una interazione fra almeno due corpi. Dal punto di vista macroscopico, si possono operativamente distinguere due tipi di forze: forze di contatto e forze a distanza. Le forze di contatto implicano che i corpi che interagiscono vengano a contatto, mentre nelle forze a distanza i corpi interagenti non sono a contatto. Si noti che a rigore le forze di contatto non esistono, come appreso dalle più moderne teorie che individuano nel “contatto” forze microscopiche agenti a distanza, come la forza elettrica di repulsione. Si prendano in considerazione alcuni esempi di forze. La forza peso è la forza diretta perpendicolarmente alla superficie terrestre che si esercita su un corpo di massa m a causa dell’attrazione gravitazionale della Terra. La forza muscolare è la forza che si sviluppa per la contrazione dei fasci muscolari, è diretta come il fascio muscolare stesso e risulta applicata dove il muscolo si innesta sullo scheletro. La forza elastica è la forza con cui reagisce un corpo elastico quando viene deformato, ha la stessa direzione della forza deformante e la sua intensità è direttamente 3.4 La forza di attrito 3.5 Massa, peso e densità 3.6 La forza di attrito viscoso e la sedimentazione 3.7 La forza centrifuga e la centrifugazione 3.8 Esempi di moto armonico 3.9 Cenni di dinamica del corpo rigido Esercizi e problemi 31 32 CAPITOLO 3 ■ Dinamica proporzionale all’entità della deformazione stessa. Altri tipi di forze sono le forze elettriche, le forze magnetiche, le forze di attrazione molecolare e così via. Le forze sono tipiche grandezze vettoriali e quindi ad esse si applicano le regole del calcolo vettoriale accennate nel Capitolo 1. Per quanto riguarda la misura delle forze è possibile procedere in due modi, l’uno statico, basato sulla deformazione prodotta su un corpo (per esempio l’allungamento di una molla), l’altro dinamico, basato sull’osservazione dei cambiamenti prodotti nello stato di moto di un corpo. Per il momento viene adottata l’idea di misurare le forze staticamente, per esempio mediante un dinamometro a molla, tarato in base al peso del campione in platino-iridio depositato all’Ufficio Internazionale dei pesi e misure di Sèvres. Nel corso del prossimo paragrafo si vedrà come, ricorrendo al secondo principio della dinamica, è possibile passare all’altro metodo di misura e, abbandonando l’unità di misura chilogrammo peso (che è definito per una particolare latitudine, al livello del mare e nel vuoto), adottare il newton (che è un’unità di misura assoluta). Si ricordi infine che in natura esistono 4 tipi di forze fondamentali (recentemente ricondotti a 3): 1) la forza di attrazione gravitazionale, che rende conto dell’interazione fra corpi aventi massa diversa da zero (es.: Terra-Sole, Terra-Luna, Sole-Giove, satelliteTerra, ecc.); 2) la forza elettromagnetica, che raccoglie le forze elettriche e le forze magnetiche che saranno trattate nel capitolo riguardante l’elettromagnetismo; 3) la forza nucleare debole, responsabile ad esempio del decadimento β dei nuclei (si veda l’ultimo capitolo), circa 1012 volte più debole della forza elettromagnetica e 1025 volte più intensa di quella gravitazionale; 4) la forza nucleare forte, che tiene insieme i componenti di un nucleo, protoni e neutroni (o più precisamente i quark), contrastando la forza elettrostatica repulsiva. Questa forza è due ordini di grandezza più intensa della forza elettromagnetica. Si ricordi infine che negli ultimi decenni la forza elettromagnetica e la forza nucleare debole sono state unificate nell’ambito della cosiddetta teoria dell’interazione elettrodebole. 3.2 Le leggi della dinamica La meccanica classica o newtoniana, che non si occupa dei fenomeni atomici (oggetto della meccanica quantistica), né di quelli che comportano velocità prossime a quella della luce (oggetto della teoria della relatività), è basata sui seguenti principi fondamentali della dinamica o di Newton: Primo principio. Ogni corpo persevera nel proprio stato di quiete o di moto rettilineo uniforme, finché le forze esterne ad esso siano nulle cioè non intervengano a modificarne lo stato (principio, o legge, d’inerzia da attribuire in realtà a Galileo). Secondo principio. L’accelerazione subita da un corpo è in ogni istante proporzionale alla forza risultante R agente su di esso e inversamente proporzionale alla sua massa. La forza risultante è la somma delle forze agenti su un corpo. Questo principio si scrive: R = Σ F = m a, dove m > 0, oppure utilizzando le componenti dei vettori: Σ Fx = m ax, Σ Fy = may , Σ Fz = maz . 3.2 ■ Le leggi della dinamica 33 Terzo principio. Dati due corpi, 1 e 2, se il corpo 1 esercita una forza F 12 sul corpo 2, il corpo 2 esercita su 1 la forza –F 21, cioè una forza avente il modulo, la direzione nonché la retta di applicazione di F 12 e il verso opposto (principio di azione e reazione). Si scrive F 12 = –F 21. Nella Figura 3.1 questo principio è illustrato per forze a distanza e forze a contatto. Prima di proseguire è bene chiarire tre concetti. Il diagramma delle forze o diagramma di corpo libero per un corpo sottoposto ad un insieme di forze è la rappresentazione grafica di tutti i vettori delle forze che agiscono sul corpo stesso; tale diagramma è indispensabile per la risoluzione dei problemi di meccanica in quanto permette di scrivere la seconda legge di Newton nelle diverse direzioni. I corpi o particelle considerati saranno sottoposti a vincoli, nel senso comune ma esteso del termine. Tali vincoli hanno l’effetto di “vincolare” il moto e/o la posizione delle particelle; esempi di vincoli sono un tavolo di appoggio per oggetti vari, una guida (ad esempio la guida delle montagne russe per i vagoni al luna park), una carrucola, una molla, una corda che sostiene l’oggetto, un piano inclinato, ecc. Se la forza di reazione (alla forza di azione dell’oggetto vincolato) del vincolo è perpendicolare alla superficie tangente al vincolo nel punto di contatto vincolooggetto, il vincolo è ideale; altrimenti il vincolo non è ideale. Nel testo verranno considerati quasi sempre vincoli ideali, con l’eccezione di quando sono presenti forze di attrito. In tutti i casi esaminati, i vincoli saranno considerati di massa nulla; per esprimere questa condizione per un corpo si usa il termine corpo leggero (ad esempio corda leggera) o corpo di massa trascurabile (corda di massa trascurabile). Gli enunciati dei primi due principi pongono innanzitutto, e per due ragioni, il problema del sistema di riferimento. La prima ragione è banale ed è riconducibile al semplice fatto che le grandezze cinematiche sono definite e misurate sempre rispetto ad un sistema di riferimento prefissato. La seconda invece è dettata n = Ftm Fg = FTm F12 = –F21 2 F12 Fmt F21 FmT 1 (a) (b) ▲ Figura 3.1 (a) Forza di azione e reazione tra due masse interagenti. (b) Quando un og- getto è appoggiato su un tavolo, sull’oggetto agiscono due forze: la forza peso diretta verso il basso e la forza di reazione vincolare n del tavolo normale alla superficie del vincolo, se il vincolo è ideale. Si osservi che, a rigore, la reazione vincolare non è la reazione alla forza peso anche se uguale ad essa. Fmt = forza esercitata dalla massa m posta sul tavolo; Ftm = forza del tavolo sulla massa appoggiata; FTm = forza della Terra sulla massa m ; FmT = forza della massa m sulla Terra. ◀ FIGURA 3.1 34 CAPITOLO 3 ■ Dinamica dalle leggi operanti in natura. Per capire questo si noti innanzitutto che ogni sistema di riferimento ancorato alla Terra, quando viene osservato dall’esterno, per esempio dal Sole, compie un moto di rotazione intorno all’asse terrestre ed un moto di rivoluzione intorno al Sole. Un moto che sulla Terra appare come rettilineo e uniforme è perciò solo apparentemente tale. Quali sono dunque i sistemi di riferimento rispetto ai quali i corpi naturali obbediscono ai primi due principi? Newton ha scoperto che la legge d’inerzia e il secondo principio valgono in riferimento alle stelle fisse (che occupano sulla volta celeste posizioni relative praticamente immutabili) o a quei sistemi di assi che rispetto ad esse si muovono di moto traslatorio uniforme. I sistemi di riferimento nei quali vale la legge d’inerzia vengono detti inerziali. Per fenomeni che si manifestano in una regione di dimensioni piccole rispetto alla Terra, è lecito considerare inerziale, con buona approssimazione, anche il sistema di riferimento solidale con il globo terrestre. Invece non è inerziale un sistema di riferimento solidale con una piattaforma ruotante. Infatti, in un sistema che si muove di moto circolare uniforme è presente un’accelerazione diretta verso il centro della traiettoria. Le leggi della dinamica possono essere estese ai sistemi non inerziali pur di introdurre delle opportune forze apparenti o pseudoforze che non sono presenti nei sistemi inerziali. Per quanto riguarda il secondo principio, sono in generale molto precise le sue verifiche sperimentali indirette. È comunque possibile stabilire anche direttamente che, variando la forza F applicata ad un corpo assegnato, il rapporto F/a (dove F è misurata staticamente) è uguale ad una costante positiva m caratteristica del corpo. Si può provare inoltre, prendendo volumi diversi della stessa sostanza, che m è proporzionale al volume, cioè alla quantità di materia considerata. Il secondo principio viene solitamente scritto come: ■ 3.1 F = ma o meglio, considerando la risultante R delle forze su un corpo: R = Σ F = ma La costante m è detta massa inerziale , o semplicemente massa, del corpo. Si conviene inoltre di adottare come campione di massa la massa del peso campione depositato a Sèvres, menzionato nel paragrafo precedente (si noti che le masse e il funzionamento delle bilance, mediante le quali si confrontano le masse stesse, non dipendono, a differenza dei pesi, dalla latitudine o dall’altitudine o dalla densità del mezzo circostante). Nel caso che su un corpo agisca una sola forza, diviene possibile allora leggere la (3.1) come una definizione (dinamica) della forza F e il valore di una forza può venire dedotto dalla misura di una massa e di un’accelerazione. Nel Sistema Internazionale l’unità di misura della forza è il newton (N ), che è definito come la forza che imprime alla massa di un chilogrammo l’accelerazione di un metro al secondo per secondo. Analogamente l’unità di misura CGS è la dina (o dyne), che è la forza che imprime ad un grammo l’accelerazione di un centimetro al secondo per secondo. Si hanno pertanto le relazioni: 1 newton = 1 kg ∙ 1 m ∙ s –2 = 1000 g × 100 cm ∙ s –2 = 105 dyne. 3.2 Un disco di massa 0.5 kg scorre su una superficie orizzontale priva di attrito. Nel caso si esercitino simultaneamente sul disco due forze di modulo F 1 = 5 N e F 2 = 8 N parallele alla superficie, si determini l’accelerazione del disco. ■ Le leggi della dinamica 35 ESEMPIO 3.1 y F2 F1 = 5.0 N F2 = 8.0 N Soluzione 60° Si assimili il disco ad una particella e si disegni per prima cosa il diagramma delle forze o diagramma di corpo libero, riportato in figura. Di seguito, seguendo il diagramma di corpo libero, si determini la forza risultante su di esso nelle componenti x e y: 20° x F1 Σ F x = F 1x + F 2x = F 1 cos 20° + F 2 cos 60° = 8.7 N Σ F y = F 1y + F 2y = –F 1 sen 20° + F 2 sen 60° = 5.2 N Per la seconda legge di Newton: ax = Σ F x /m = 8.7/0.5 = 17.4 m/s2 ay = Σ F y /m = 5.2/0.5 = 10.4 m/s2 da cui: a = a x2 + a y2 = 20.3 m/s2 θ = tg–1 (a y /a x ) = 30.87° o 0.54 rad (angolo formato dal vettore accelerazione con l’asse x) Due corpi di massa m1 = 50 kg e m2 = 40 kg, sono sospesi ad una puleggia leggera e senza attrito, dove la fune è inestensibile e leggera (macchina di Atwood). Calcolare il modulo dell’accelerazione delle due masse e la tensione della fune. T T + m2 m2 m1 + ESEMPIO 3.2 m1 m2g m1g (a) (b) (a) La macchina di Atwood; (b) diagramma di corpo libero per m 1 e m 2 . continua 36 CAPITOLO 3 ■ Dinamica Segue: Esempio 3.2 Soluzione Si consideri l’asse y orientato verso il basso e nell’attribuire i segni alle componenti dell’accelerazione si tenga conto del fatto che la massa più grande (m 1) scende, mentre quella più piccola (m 2) sale. Applicando la seconda legge di Newton a m 1 e m 2 : ΣF y1 = –T + m 1g = m 1a ΣF y2 = –T + m 2 g = –m 2 a Sottraendo la seconda equazione dalla prima ed eliminando così T si ha: m 1g – m 2 g = m 1a + m 2 a cioè: a = g(m 1 – m 2 )/(m 2 + m 1) = 1.09 m/s2 e, sostituendo a nella seconda di Newton valida per la massa m 2 , si ottiene: 2 m 1m 2 T = ––––––––– g = 436 N m1 + m2 Il principio di azione e reazione ha importanti conseguenze per lo studio del moto dei sistemi costituiti da più corpi. Di seguito viene brevemente accennata la conseguenza più diretta del terzo principio, cioè il teorema di conservazione della quantità di moto. Si definisce quantità di moto di un corpo di massa m che si muove con velocità v la grandezza vettoriale: ■ 3.2 q = mv Inoltre si dice sistema isolato un sistema per cui la risultante delle forze esterne sia nulla o alternativamente attraverso i contorni del quale non ci siano trasferimenti di energia dal sistema all’ambiente circostante e viceversa. Il teorema di conservazione della quantità di moto afferma che in un sistema isolato la quantità di moto totale del sistema si conserva. Segue la dimostrazione di come questo teorema sia una conseguenza immediata del terzo principio della dinamica. Si consideri per semplicità un sistema isolato costituito da due corpi puntiformi A e B. Per il terzo principio, se FAB è la risultante delle forze che B esercita su A, FBA = –FAB è la risultante delle forze che A esercita su B. Dal secondo principio della dinamica (3.1) e dalla definizione di accelerazione si ha: aA = FAB /mA = d vA /dt aB = FBA /mB = d vB /dt ma per il terzo principio FAB + FBA = 0 per cui: ■ 3.3 mA dvA /dt + mB dvB /dt = 0 Moltiplicando ambo i membri per dt e integrando fra uno stato iniziale i e uno finale f di un corpo, la (3.3) diventa: ■ 3.4 mA (vAf – vAi ) + mB (vBf – vBi) = mA DvA + mB DvB = 0 7 I GAS E LE SOLUZIONI Sommario 7.1 Introduzione 7.2 Leggi dei gas perfetti 7.3 Leggi dei gas reali 7.1 Introduzione Un gas è un sistema costituito da un grande numero di atomi o di molecole che interagiscono debolmente fra di loro. Pertanto un gas costituisce uno dei più semplici sistemi termodinamici e come tale verrà trattato nel capitolo successivo. In questo capitolo verranno richiamate le leggi fondamentali che regolano in modo specifico il comportamento dei gas e delle soluzioni, lasciando al capitolo successivo lo studio delle leggi che regolano il comportamento di gas e soluzioni considerati come un caso particolare di sistema termodinamico. Lo stato fisico di un gas può essere descritto principalmente e nella maggior parte dei casi dai valori che assumono le seguenti grandezze: pressione, volume, temperatura e densità. Per l’introduzione del concetto di temperatura e la sua misura, si rimanda al Capitolo 8; nel presente capitolo si fa riferimento alla grandezza temperatura ricorrendo al concetto quotidiano e a quanto già introdotto in altri corsi universitari e nelle scuole superiori. Le leggi dei gas sono delle relazioni che si possono stabilire tra le grandezze sopraelencate e che devono valere in condizioni di equilibrio o nel corso di particolari tipi di trasformazioni del gas. Sperimentalmente è stato trovato che i gas rarefatti e ad alta temperatura obbediscono abbastanza bene ad una serie di leggi relativamente semplici dette leggi dei gas perfetti. Queste stesse leggi possono essere ricavate mediante un calcolo teorico che parte dalle proprietà microscopiche del gas (teoria cinetica dei gas), purché si assuma un modello in cui il gas è costituito da molecole puntiformi, che non interagiscono e che si urtano in modo perfettamente elastico. Un gas perfetto è un gas che si può identificare con il modello ideale descritto, oppure, più semplicemente, un gas che obbedisce rigorosamente alle equazioni dei gas perfetti. 7.4 Pressione parziale 7.5 Le soluzioni 7.6 Diffusione 7.7 Osmosi e pressione osmotica 7.8 Lavoro osmotico e potenziale chimico in soluzioni diluite 7.9 Potenziale elettrochimico ed equilibrio di Donnan-Gibbs 7.10 Fenomeni osmotici e diffusione di gas nell’organismo umano 7.11 Meccanica della respirazione 7.12 Equilibrio meccanico degli alveoli Esercizi e problemi 119 120 CAPITOLO 7 ■ I gas e le soluzioni In termini microscopici, quindi, un gas perfetto è un gas costituito da un insieme di molecole o atomi in moto casuale, tra cui non esistono forze a lunga distanza, e che occupano una frazione trascurabile del volume del loro contenitore. L’approssimazione con cui i gas reali obbediscono alle leggi dei gas perfetti è tanto migliore quanto più il gas, reale è lontano dalle condizioni di liquefazione. In questo capitolo oltre ai gas vengono trattate anche le soluzioni per il seguente motivo: una soluzione si comporta per certi aspetti come un gas di atomi o molecole di soluto che si muovono in un volume pari al volume della soluzione. 7.2 Leggi dei gas perfetti Per un gas perfetto valgono le seguenti leggi. Legge di Boyle Indicando con p la pressione e V il volume di una certa massa di gas, a temperatura costante si ha: p V = cost ■ 7.1 Leggi di Gay-Lussac Se un gas viene riscaldato mantenendo la pressione costante, che il volume del gas a temperatura t è legato al volume V 0 del gas a zero gradi centigradi dalla relazione: V t = V 0 (1 + αt ) ■ 7.2 dove la temperatura t è espressa in gradi centigradi (°C) o Celsius. Se invece un gas viene riscaldato a volume costante, la pressione a temperatura t è legata alla pressione a zero gradi centigradi dalla relazione: p t = p 0 (1 + βt ) ■ 7.3 Utilizzando le relazioni (7.1) e (7.2) si potrebbe dimostrare che deve essere α = β. Secondo le due leggi di Gay-Lussac il coefficiente α di dilatazione è lo stesso per tutti i gas e vale α < 1/273. Per i gas reali le tre leggi riportate sono verificate con buona approssimazione solo se i gas sono lontani dalle condizioni di liquefazione. Le tre leggi precedenti possono essere compendiate in un’unica legge che stabilisce una relazione tra il volume V 0 e la pressione p 0 alla temperatura di 0° centigradi e il volume V e la pressione p alla temperatura di t gradi centigradi. Infatti consideriamo le seguenti trasformazioni: condizioni iniziali dopo una isoterma dopo una isocora condizioni finali I II III IV p 0 p ′ p p V 0 V V V 0° 0° t t Nel passaggio dallo stato I allo stato II vale la legge di Boyle: p 0V 0 = p ′V ; nel passaggio dallo stato II allo stato III vale la seconda legge di Gay-Lussac: 7.2 ■ Leggi dei gas perfetti 121 p = p ′ (1 + α t ); ricavando dalla seconda relazione p ′ e sostituendo nella prima si ottiene: p V = p 0V 0 (1 + α t ) 7.4 ■ 7.5 ■ L’Equazione (7.4), chiamata equazione di stato dei gas perfetti, stabilisce la relazione che deve esistere fra i parametri termodinamici p, V e t per una certa massa di gas che si trovi in uno stato di equilibrio. Legge di Avogadro Si ricordi che una grammomolecola (in chimica moderna del tutto equivalente a dire una mole di molecole ) di una sostanza rappresenta una quantità, in grammi, numericamente uguale al peso molecolare della sostanza misurato in unità atomiche (posto il peso di un atomo di idrogeno = 1). Si ricorda che una mole di particelle di un certo tipo (ioni, atomi, molecole, ecc.) corrisponde a 6.022 ∙ 10 23 particelle. Così come si usa il termine grammomolecola per una mole di molecole, si usa grammoione per una mole di ioni e grammoatomo per una mole di atomi. La legge dedotta da Avogadro afferma che volumi uguali di qualsiasi gas perfetto, nelle stesse condizioni di pressione e temperatura, contengono un ugual numero di molecole e, sapendo che una grammomolecola di qualsiasi sostanza contiene lo stesso numero di molecole e precisamente NA = 6.022 ∙ 1023, si ha che una grammomolecola di qualsiasi gas occupa, nelle stesse condizioni di pressione e temperatura, lo stesso volume. Alla temperatura di 0 °C e alla pressione di 1 atm, il volume occupato da una grammomolecola di qualsiasi gas è V0 = 22.41 litri. Introducendo la temperatura assoluta (e l’associata scala kelvin) definita da: T (K ) = 273.15 + t (°C), è possibile riscrivere la (7.4) nel modo seguente: p V = (p 0V 0 /273.15) T = n RT dove la quantità p 0V 0 /273.15 è stata posta uguale ad una costante R detta costante dei gas perfetti. Poiché la costante R si riferisce ad una grammomolecola è necessario moltiplicare per il numero n di grammomolecole (o moli) perché la legge valga per una quantità qualsiasi di gas. Per la legge di Avogadro la costante R è uguale per tutti i gas perfetti. Infatti una grammomolecola di un gas perfetto a 0 °C e 1 atm occupa un volume di 22.41 litri. Quindi si calcola: R = p 0V 0 /273.15 ≈ 1 ∙ 22.41/273.15 ≈ 0.082 litri ∙ atmosfere che espressa nel sistema MKS- SI diventa: R = p 0V 0 /273.15 = 105 ∙ 22.41 ∙ 10–3/273.15 = 8.315 joule/K ∙ mole. Un cilindro di sezione con area A è chiuso da un pistone a tenuta, libero di muoversi in verticale, e contiene un gas ideale. La pressione iniziale esercitata dal pistone è 100 kPa ed esso si trova a 20 cm dalla base del cilindro. Aggiungendo una massa sopra il pistone la pressione aumenta fino a 150 kPa. ESEMPIO 7.1 continua 122 CAPITOLO 7 ■ I gas e le soluzioni Segue: Esempio 7.1 Supponendo che T resti costante e uguale a 300 K, si trovi la nuova altezza del pistone. Soluzione Secondo la legge di Boyle si ha: P 1V 1 = P 2V 2 1 V 2 = V 1 (P 1 /P 2 ) Scrivendo inoltre V 1 = Ah 1 e V 2 = Ah 2 , si ha: h 2 = h 1 (P 1/P 2 ) = 20 cm ∙ 100 kPa/150 kPa = 13.3 cm ESEMPIO 7.2 Un gas perfetto contenuto in un cilindro con pistone a tenuta e scorrevole senza attrito, occupa un volume iniziale V 1 = 4 litri a t 1 = 20 °C. Si calcoli il volume V 2 del gas quando dalla temperatura iniziale passa alla temperatura t 2 = 110 °C, a pressione costante. Soluzione Dalla legge di Gay-Lussac si deduce: V 1 = V 0 (1 + α t 1 ) e V 2 = V 0 (1 + α t 2 ) dove V 0 è il volume occupato dal gas a 0 °C. Dividendo membro a membro queste due equazioni si ottiene: V 2 /V 1 = (1 + α t 2 )/(1 + α t 1 ) da cui, poiché α = (273.16 °C)–1, si ha: V 2 = V 1(1 + α t 2 )/(1 + α t 1 ) = V 1 (273.16 °C + t 2 )/(273.16 °C + t 1 ) = = 5.23 litri 7.3 Leggi dei gas reali Nel paragrafo precedente è stata discussa un’equazione di stato valida per gas perfetti e si è detto che un gas reale si comporta come un gas perfetto solo lontano dalle condizioni di liquefazione. In questo paragrafo verrà considerato il comportamento di un gas reale per vedere in che cosa esso si discosta da un gas perfetto, particolarmente in prossimità della temperatura di liquefazione. Si prendano in considerazione delle trasformazioni isoterme, ottenute comprimendo o espandendo un gas lentamente in modo che la temperatura rimanga quella del termostato con cui il gas è in contatto termico. Per una mole di gas perfetto l’equazione dell’isoterma è: p V = R T = cost. Se si riporta in un diagramma cartesiano la pressione p in funzione del volume V si ottengono delle iperboli, come mostrato in Figura 7.l. Le iperboli corrispondono a diversi valori della temperatura assoluta T. Se si riportano invece in un diagramma p-V i valori sperimentali che si ottengono per le isoterme di un gas reale si ottengono delle curve come quelle mostrate in Figura 7.2. Si osservi che, in questo secondo caso, per poter dare i valori numerici di p, V, e T bisognerebbe specificare di quale gas si tratta.
© Copyright 2026 Paperzz