Paper
zz
Explore Categories
Log in
Create new account
No category
Documento PDF
Download
Report
GINNASTICA CORRETTIVA E RIEDUCATIVA
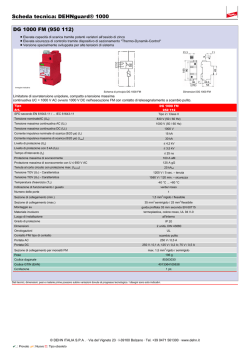
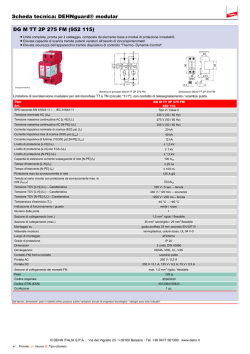
Scheda tecnica
SUNSYS B20E
Manuale_Moto-inverter NEO VF 3PH KWmax2,2_ITA
Datasheet Commerciale
Disposizione Sale
Inverter di stringa ABB UNO-2.0/2.5-I
v-366.28-25 - Catalogo FAET
scarica la scheda completa
Scheda dati - meteocontrol
© Copyright 2026 Paperzz
About Paperzz
DMCA / GDPR
Report