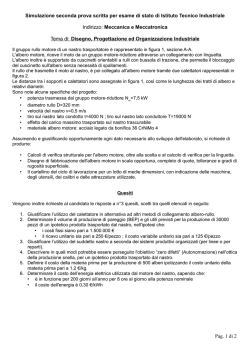
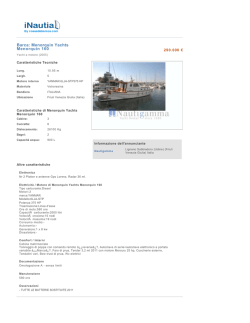
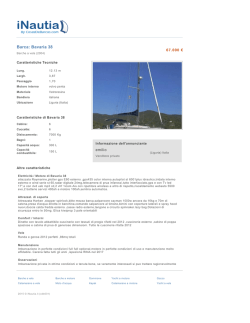
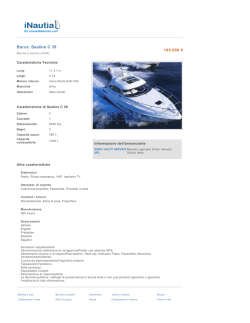
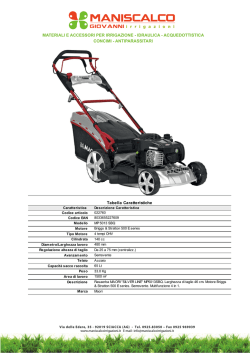
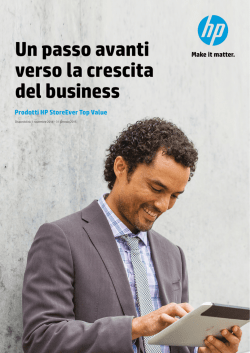
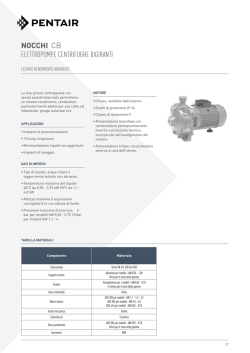
Disegno e fondamenti di meccanica applicata Nastro trasportatore Disegno e Fondamenti di meccanica applicata Anno accademico 2007-2008 Esercitazione: Nastro trasportatore Sezione di materiale b1 L :=30° b h Figura 1 Sono assegnati i dati del sistema riportati nella Tabella 1. Dati Nastro Materiale trasportato Tamburi Trasmissione Attrito Motore (MarelliMotori a 4 poli Modello 315S) Massa per unità di lunghezza mu Lunghezza L Altezza h Larghezza b Portata oraria q Densità * Larghezza b1 Diametro DT Spessore s Larghezza bT Rendimento / Coeff. Attrito volvente fv Potenza nominale WMn Velocità di sincronismo s Coppia nominale Cn Momento di inerzia Jm Costanti della curva caratteristica Tabella 1 [kg/m] [m] [m] [m] [tonn/h](*) [kg/m3] [m] [m] [mm] [m] [-] [-] [kW] [giri/min] [Nm] [kgm2] A B1 B2 n 30 200 15 1.5 1260 800 0,5 1,1 5 1,6 0,8 0,03 110 1500 750 1.151 1000 0.1 1 1.5 [(*) 1 tonn=1000 kg] 1 Disegno e fondamenti di meccanica applicata Nastro trasportatore Si richiede di svolgere i seguenti punti: • • • Calcolo della velocità del nastro a regime. Determinazione del rapporto della trasmissione. Scrittura dell’espressione dell’accelerazione angolare del motore, indicando i valori dei contributi inerziali dei diversi elementi: o motore; o tamburi o nastro o materiale Analisi del transitorio di avviamento del nastro in presenza ed in assenza di materiale sul nastro. Lo studio venga effettuato mediante integrazione numerica dell’equazione del moto. Calcolo delle potenze a regime, considerando l’effettiva velocità di regime stimata dall’integrazione nel tempo del punto precedente. • • Traccia di soluzione 1. Velocità nastro a regime Portata di massa in funzione della velocità q = Am m V Dove Am è l’area della sezione trasversale del materiale h1 essendo h1 = (b b1 ) / 2 sin(30°) 2 Si ottiene la velocità del nastro a regime Am = ( b + b1 ) V [m / s] = q[kg / s ] Am [m ] m [kg / m3 ] 2 La velocità angolare dei due tamburi risulta T [rad / s ] = 2V DT 2. Dimensionamento del motore e scelta del rapporto di trasmissione Dal bilancio di potenze a regime si ottiene CM M (1 ) CM M Am L m g sen V + WP = 0 Dove WP è la potenza dissipata dai rulli per attrito volvente. Per il calcolo della potenza WP si deve calcolare la reazione vincolare Ri scambiata tra il generico iesimo rullo e il nastro. Detta Li la distanza tra due rulli successivi, si può attribuire al singolo rullo un carico pari al peso del materiale e del nastro che si trovano ad una distanza compresa tra ±Li/2 dal rullo stesso. 2 Disegno e fondamenti di meccanica applicata Nastro trasportatore Risulta quindi per un rullo posto sul tratto di andata (vedi Figura 2): RiA = ( mu + Am m ) gLi cos Per un rullo posto sul tratto di ritorno, il carico è associato al solo peso del nastro e risulta quindi RiB = mu gLi cos Li Li/2 Li Li/2 Si+1 Ti Ri Ti Pmi Si Pni Ri Mvi hi vi Figura 2 Detto nA il numero di rulli sul tratto di andata e nR il numero di rulli sul tratto di ritorno si ha WP = nA i =1 RiA f vV nR i =1 RiB f vV = nA RiA f vV nB RiB f vV Essendo i rulli distribuiti in modo uniforme risulta n A = nR = WP = L Li Li L ( mu + Am m ) gLi + mu gLi cos f vV = ( 2mu + Am m ) gLf vV cos Dal bilancio delle potenze risulta quindi WM = CM M = Am L m g sen V + ( 2mu + Am m ) gLf vV cos 3 Disegno e fondamenti di meccanica applicata Nastro trasportatore Si verifica che la potenza nominale motore sia maggiore di quella richiesta: WMn WM Scelto il motore dal catalogo, si può scegliere il rapporto di trasmissione in base alla velocità di rotazione nominale del motore: FM = FMn = 1460 giri/min Il rapporto di trasmissione è definito come = T M Dalla relazione tra la velocità del nastro e la velocità di rotazione dei tamburi si ha: D D V= T T = T M 2 2 Si può quindi scegliere il rapporto di trasmissione come V DT Mn 2 3. Analisi del transitorio di avviamento L’accelerazione angolare del motore si ricava del bilancio di potenze scritto in transitorio. WE + WP + WU = dEC dt Considerando che il transitorio di avviamento nella condizione più gravosa, ossia con il materiale già posto sul nastro, si ottiene dunque: CM M (1 )( CM JM &M M M ) FuV FpV = J M & M M + mu ( 2 L + DT ) Va + J T &T T + m Am LVa Dove Fu = Am m gL sen Fp = ( 2mu + Am m ) gLf v cos In assenza di materiale, si annullano i contributi associato al volume ad esso associato. L’unica inerzia ancora da determinare è quella del tamburo e può essere ricavata dalle sue caratteristiche geometriche considerando un cilindro uniforme cavo di spessore sT. J T = ( DT sT ) bT DT 2 2 4 Disegno e fondamenti di meccanica applicata Nastro trasportatore Dalle relazioni cinematiche: T = &T = & M M DT 2 Si ricava V= M a= DT 2 &M CM &M = J M + 2JT 2 Fu DT 2 + (2 L + DT )mu FP DT 2 DT 2 2 + Am L m DT 2 2 (Eq. 1) La coppia motrice è assegnata in funzione dello scorrimento s tra il campo magnetico rotante e la velocità di rotazione del motore. Esso è definito dalla espressione s= M s s Dove Fs è velocità di sincronismo ed è dipendente dalla frequenza di alimentazione della rete elettrica e dal numero di coppie polari del motore. Per un motore a 2 coppie polari alimentato a 50 Hz, la velocità di sincronismo risulta: S = 2 fa rad = 157 ncp s La caratteristica del motore asincrono trifase è assegnata in funzione dello scorrimento s: As B1 + B2 s n Cui corrispondono i due grafici in funzione dello scorrimento, e della velocità angolare del motore, riportati nel seguito. C M ( s) = 5 Disegno e fondamenti di meccanica applicata Nastro trasportatore L’equazione differenziale (1) può essere integrata numericamente per passi utilizzando il metodo di Eulero. Fissato un passo di integrazione JT, il metodo di Eulero prevede di ottenere la velocità di rotazione del motore al passo i+1 dalla espressione M i +1 = Mi + & Mi T È possibile quindi integrare l’equazione a partire dalla condizione iniziale sulla velocità (avviamento da fermo) M (t = 0) = 0 6 Disegno e fondamenti di meccanica applicata Nastro trasportatore Per integrare l’equazione si procede nel modo seguente: • note la velocità e l’accelerazione angolare del motore al passo precedente (i-1), si calcola la velocità al passo corrente (i) tramite la formula di Eulero; • dalla velocità FMi, si ricava lo scorrimento si; • dallo scorrimento si, si ricava la coppia motrice Cmi; • si calcola l’accelerazione angolare al passo i dalla Eq.1 essendo ora note tutte le grandezze al passo i. È ora possibile iterare il procedimento per il passo i+1. Il metodo di integrazione è riassunto in Tabella 2. Passo Ti Mi 0 0 M0 =0 1 JT M1 = 2 2 JT … … I i JT … M2 = M0 M1 … Cmi & Mi 0 Cm(s0) &M 0 = &M ( M0 Cm(s1) &M1 = &M ( M1 Cm(s2) &M 2 = &M ( M2 + &M 0 T s1 = + &M1 T s2 = M1 s s s M2 s … Mi si … = Mi 1 + & Mi … 1 T si = … Mi s Cm(si) … , Cm1 , FP , FU ) , Cm 2 , FP , FU ) … & Mi = & M s … Tabella 2 , Cm 0 , FP , FU ) ( Mi , Cmi , FP , FU ) … Integrando per un tempo sufficiente, il sistema si porta a lavorare in prossimità della velocità di regime M , giudicata in base al fatto che l’andamento della velocità si presenta con un adnamento tendente ad un asintoto. 4. Calcolo della potenza a regime Le potenze a regime sono date dalle espressioni: WM = CM WU = FU WP1 = (1 WP 2 = FP M DT 2 = CM ( s ) M M )WM DT 2 M 7
© Copyright 2026 Paperzz