Prof. Cesare Fantuzzi
Ing. Cristian Secchi
Ing. Federica Ferraguti
ARSControl - DISMI - Università di Modena e Reggio Emilia
E-mail: {nome.cognome}@unimore.it
http://www.arscontrol.org/teaching
Controlli Automatici
10. Regolatori standard
PID
Controllori standard
Caratteristiche desiderate dei regolatori da inserire nel loop
Semplicità di tuning
Basso costo
Standardizzazione
Semplicità della legge (algoritmi complessi non servono, le limitazioni
maggiori sono imposte dalla tecnologia)
Controlli Automatici
PID 2
Regolatore PID
Un regolatore in retroazione
•
Riceve informazioni sul riferimento e uscita controllata
•
Manipola la differenza tra i due valori (segnale errore)
•
Calcola ed attua l’azione di controllo
Cosa vogliamo conoscere sul segnale errore 𝒆(𝒕)?
Presente
𝑒(𝑡)
𝑒(𝑡)
Passato
Futuro
𝑒 𝜏 𝑑𝜏
presente
𝑑𝑒(𝑡)
𝑑𝑡
futuro
passato
Controlli Automatici
now
𝑡
PID 3
Regolatore PID
Regolatore Proporzionale Integrale Derivativo - PID
Regolatore standard con tre azioni di controllo combinate:
azione proporzionale all’errore
azione proporzionale all’integrale dell’errore
azione proporzionale alla derivata dell’errore
Standard industriale ed utilizzabile per moltissimi impianti.
Implementabile con molte tecnologie:
elettriche (analogiche e digitali)
meccaniche
pneumatiche
oleodinamiche
Spesso, sui sistemi di controllo industriale sono già disponibili moduli software
che li implementano.
Controlli Automatici
PID 4
Motivazioni del successo del PID
Notevole efficacia nella regolazione di un’ampia gamma di processi
industriali
Tecniche di taratura semplici ed automatiche applicabili anche quando il
modello dell’impianto è poco noto
Importanza e convenienza economica della standardizzazione
Possono essere usati come elementi base di schemi di controllo articolati
(es: controllo in cascata) portando notevolissimi miglioramenti delle
prestazioni
Consente di ottenere prestazioni accettabili anche con una scarsa
conoscenza del modello del sistema
I PID hanno successo perché rappresentano una soluzione non facilmente
superabile, in generale, nel rapporto efficacia/costo
Controlli Automatici
PID 5
Regolatore PID
𝐾𝑝
𝑦𝑟𝑒𝑓 (𝑡)
𝑒(𝑡)
+
_
𝑦(𝑡)
𝐾𝑖 /𝑠
+
+
𝑢(𝑡)
+
Azione proporzionale all’errore
Azione proporzionale all’integrale dell’errore
Azione proporzionale alla derivata dell’errore
𝐾𝑑 𝑠
Se 𝑒(𝑡) è il segnale di errore, l’azione di controllo del PID è definita come
𝑡
𝑑𝑒(𝑡)
𝑢 𝑡 = 𝐾𝑝 𝑒 𝑡 + 𝐾𝑖 𝑒 𝜏 𝑑𝜏 + 𝐾𝑑
𝑑𝑡
𝑡0
𝐾𝑝 : coefficiente dell’azione proporzionale
𝐾𝑖 : coefficiente dell’azione integrale
𝐾𝑑 : coefficiente dell’azione derivativa
Controlli Automatici
PID 6
Funzione di trasferimento
𝑡
𝑢 𝑡 = 𝐾𝑝 𝑒 𝑡 + 𝐾𝑖
𝑡0
𝑒 𝜏 𝑑𝜏 + 𝐾𝑑
𝑑𝑒(𝑡)
𝑑𝑡
Funzione di trasferimento
𝐺𝑃𝐼𝐷
𝐾𝑑 𝑠 2 + 𝐾𝑝 𝑠 + 𝐾𝑖
𝐾𝑖
𝑠 = 𝐾𝑝 + + 𝐾𝑑 𝑠 =
𝑠
𝑠
2 zeri a parte reale negativa, 1 polo nell’origine
Il PID nella sua forma ideale è un sistema
improprio, non fisicamente realizzabile
Rappresentazione alternativa:
𝐺𝑃𝐼𝐷 𝑠 = 𝐾𝑝
1
𝑇𝑖 𝑇𝑑 𝑠 2 + 𝑇𝑖 𝑠 + 1
1+
+ 𝑇𝑑 𝑠 = 𝐾𝑝
𝑇𝑖 𝑠
𝑇𝑖 𝑠
in cui
𝑇𝑖 =
𝑇𝑑 =
𝐾𝑝
𝐾𝑖
𝐾𝑑
𝐾𝑝
: tempo integrale (o di reset)
: tempo derivativo
Controlli Automatici
PID 7
PID in forma reale
Il PID è un sistema improprio per la presenza del termine derivativo.
Per questo motivo nella pratica si utilizza la seguente approssimazione:
𝑇𝑑 𝑠 ≈
𝑇𝑑 𝑠
𝑇
1 + 𝑑𝑠
𝑁
dove la costante positiva 𝑁 è scelta in modo che il polo 𝑠 = − 𝑇𝑁 aggiunto per la
𝑑
realizzabilità, sia all’esterno della banda di frequenze di interesse nel
controllo. Tipicamente 𝑁 = 5 ÷ 20
𝑁
𝑇𝑑
Il polo reale modifica anche la posizione degli zeri.
Nel seguito si farà comunque riferimento alla forma ideale, ricordando poi di
aggiungere il polo reale fuori banda.
Controlli Automatici
PID 8
Significato delle tre azioni di controllo
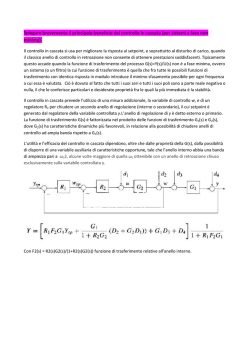
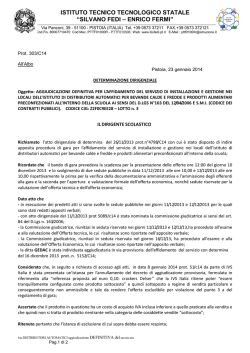
Azione proporzionale
Maggiore è l’errore, maggiore è l’azione di controllo
Vantaggi
Accelera il sistema
Riduce l’errore a regime (non fino ad azzerarlo)
Svantaggi
Tende a destabilizzare il sistema
Controlli Automatici
PID 9
Significato delle tre azioni di controllo
Step Response
1.4
1.2
1
Increasing 𝐾𝑝
0.8
Amplitude
Kp=5
Kp=4
0.6
Kp=3
Kp=2
0.4
Kp=1
0.2
0
0
1
2
3
4
5
6
7
8
Time (sec)
Controlli Automatici
PID 10
Significato delle tre azioni di controllo
Azione integrale
Permette di annullare asintoticamente l’errore a fronte di segnali di
riferimento o disturbi additivi costanti
Vantaggi
Annulla l’errore a regime in presenza di riferimenti costanti
Svantaggi
Destabilizza il sistema
Controlli Automatici
PID 11
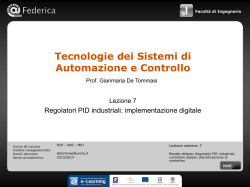
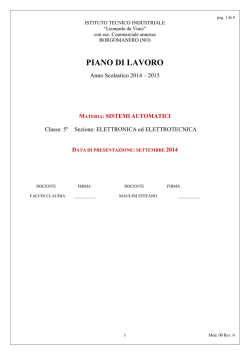
Significato delle tre azioni di controllo
Azione derivativa
Anticipa l’andamento dell’errore negli istanti futuri evitando che il sistema
scappi lontano dal riferimento a causa dell’accelerazione data dal
proporzionale.
Azione di controllo «preventiva».
Vantaggi
Stabilizza il sistema
Svantaggi
Tende a rallentare il sistema
Controlli Automatici
PID 12
Significato delle tre azioni di controllo
Step Response
1.4
1.2
1
Increasing 𝑇𝑑
Amplitude
0.8
0.6
0.4
0.2
0
0
2
4
6
8
10
12
14
16
18
Time (sec)
Controlli Automatici
PID 13
Significato delle tre azioni di controllo
Non tutte le azioni devono essere presenti contemporaneamente: in
particolare è possibile impiegare soltanto una di esse o combinazioni di due.
Trascurando i regolatori caratterizzati unicamente dalla presenza dell’azione
derivativa, o delle azioni integrale e derivativa soltanto, dal generico PID si
possono ottenere come casi particolari:
Regolatore P
Regolatore I
Regolatore PI
Regolatore PD
Controlli Automatici
PID 14
Taratura automatica dei parametri
Quando la funzione di trasferimento del sistema da controllare è nota, i
parametri del PID possono essere tarati per mezzo di tecniche di sintesi
classiche (ad esempio tecniche basate sul luogo delle radici).
A volte, però, la costruzione di un modello del plant a partire dalle leggi fisiche
che lo governano può richiedere un impegno sproporzionato rispetto alle
esigenze di progetto.
In questi casi esistono delle strategie per tarare i parametri del PID a partire
da prove sul campo effettuate sul plant.
Esistono svariati metodi, alcuni dei quali già implementati su alcuni controllori
industriali commercializzati su larga scala.
Controlli Automatici
PID 15
Metodi in anello chiuso
Metodo di Ziegler e Nichols in anello chiuso
L’algoritmo è il seguente:
Si attiva inizialmente solo l’azione proporzionale
Si innalza il coefficiente 𝐾𝑝 finchè il sistema retroazionato raggiunge il limite di stabilità,
cioè fino a quando, a fronte di variazioni a scalino imposte al segnale di riferimento,
l’uscita del sistema è in oscillazione permanente di periodo 𝑇
Controlli Automatici
PID 16
Metodi in anello chiuso
Il corrispondente valore di 𝐾𝑝 è chiamato guadagno critico
Una volta determinati 𝐾𝑝 e 𝑇 i parametri del PID vengono tarati secondo la seguente
tabella
Ziegler-Nichols
anello chiuso
𝑲𝒑
P
PI
PID
0.5 𝐾𝑝
Controlli Automatici
𝑻𝒊
0.45 𝐾𝑝
0.8 𝑇
0.6 𝐾𝑝
0.5 𝑇
𝑻𝒅
0.125 𝑇
PID 17
Metodi in anello aperto
I metodi di taratura automatica ad anello aperto valgono per i plant stabili, la
cui risposta al gradino non è oscillante. Ciò può essere testato sul campo
semplicemente eccitando il plant con un gradino.
Una volta testato che il plant risponde a un gradino in ingresso senza
oscillazioni, è necessario approssimare il sistema da controllare come un
sistema del primo ordine con ritardo del tipo
𝐾
𝐺 𝑠 =
𝑒 −𝜃𝑠
1 + 𝜏𝑠
Esistono svariati metodi per ottenere 𝐺 𝑠 a partire dalla risposta al gradino
del plant. Verrà illustrato il metodo delle aree.
Controlli Automatici
PID 18
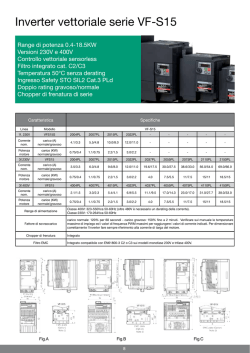
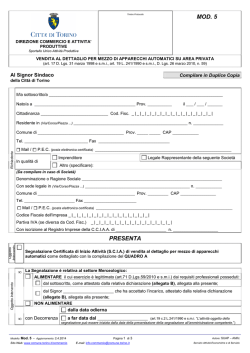
Metodo delle aree
Si considera la risposta del plant ad un gradino di ampiezza 𝐴
Valore di regime dell’uscita
𝑦
𝐾=
𝑦
𝐴
𝑆1
𝜃+𝜏 =
𝑦
Guadagno statico
𝑆1
𝑦
𝑒𝑆2
𝑦
𝑆2
𝜏=
𝜃+𝜏
(𝑆1 − 𝑦𝜏)
𝜃=
𝑦
Controlli Automatici
𝑡
Costante di tempo
Ritardo
PID 19
Metodo delle aree
L’algoritmo da seguire per trovare il modello approssimato è il seguente:
Eccitare il sistema con un gradino di ampiezza 𝐴 e graficare la risposta
Ottenere il guadagno statico 𝐾 mediante
𝑦
𝐾=
𝐴
Trovare, anche in via approssimata, l’area 𝑆1
Ottenere l’ascissa 𝜃 + 𝜏 mediante
𝑆1
𝜃+𝜏 =
𝑦
e tracciare una retta verticale passante per 𝜃 + 𝜏
Trovare, anche in via approssimata, l’area 𝑆2
Ottenere la costante di tempo 𝜏 e il ritardo 𝜃 mediante
𝑒𝑆2
𝜏=
𝑦
(𝑆1 − 𝑦𝜏)
𝜃=
𝑦
Controlli Automatici
PID 20
Metodi in anello aperto
Una volta approssimato il plant come
𝐺 𝑠 =
𝐾
𝑒 −𝜃𝑠
1 + 𝜏𝑠
Esistono diversi metodi di taratura del PID.
Metodo di Ziegler e Nichols in anello aperto
Il metodo è lo stesso descritto in precedenza. Tuttavia, in questo caso si
utilizza la seguente tabella
Ziegler-Nichols
anello aperto
P
PI
PID
Controlli Automatici
𝑲𝒑
𝑻𝒊
𝜏
𝐾𝜃
0.9𝜏
𝐾𝜃
1.2𝜏
𝐾𝜃
3𝜃
2𝜃
𝑻𝒅
0.5 𝜃
PID 21
Metodi in anello aperto
Metodo di ottimizzazione
Alcuni metodi di taratura consistono nel determinare i parametri del
regolatore in modo da minimizzare opportune funzioni obiettivo
caratterizzanti le risposte del sistema in anello chiuso a fronte di andamenti a
scalino del segnale di riferimento o dei disturbi
∞
𝟎
𝑰𝑨𝑬 =
𝒆(𝒕) 𝒅𝒕
Integral Absolute Error
Penalizza il modulo dell’errore
𝑰𝑻𝑨𝑬 =
∞
𝒕
𝟎
𝒆(𝒕) 𝒅𝒕
Integral Time Absolute Error
Poco penalizzato il modulo dell’errore nei primi istanti del transitorio
𝑰𝑺𝑬 =
∞ 𝟐
𝒆 (𝒕) 𝒅𝒕
𝟎
Integral Square Error
Penalizza l’integrale del quadrato dell’errore
𝑰𝑺𝑻𝑬 =
∞ 𝟐
𝒕
𝟎
𝒆𝟐 (𝒕) 𝒅𝒕
Integral Square Time Error
Sono accettabili errori anche elevati nei primi istanti della risposta
Controlli Automatici
PID 22
Metodi in anello aperto
Sono state proposte regole empiriche di taratura di regolatori PI o PID
ottenute interpolando i risultati di specifiche prove di ottimizzazione.
Ad esempio, per il funzionale 𝑰𝑻𝑨𝑬 si possono utilizzare le seguenti formule
ITAE
𝑲𝒑
𝑻𝒊
PI
0.586 𝜏
𝐾
𝜃
0.916
𝜏2
1.03 𝜏 − 0.165 𝜃
PID
0.965 𝜏
𝐾
𝜃
0.855
𝜏2
0.796 𝜏 − 0.147 𝜃
Controlli Automatici
𝑻𝒅
𝜃
0.308 𝜏
𝜏
0.929
PID 23
© Copyright 2026 Paperzz