Revisione
gen. 2015
Un modello strutturale della
Goniometria Iperbolica
Claudio Magno
www.cm-physmath.net
CM_Portable MATH Notebook Series™
Un modello strutturale della Goniometria Iperbolica –
Ipparco (~190 a. C. - ~120 a. C.)
1
Un modello strutturale della Goniometria Iperbolica –
2
La struttura delle Goniometrie Piane
Introduzione
Lo scopo di queste note sintetiche e informali (e, per questo, forse, poco coerenti) è il tentativo di un confronto tra la
Goniometria Circolare – generalmente nota dall’esperienza scolastica superiore – e quella cosiddetta Iperbolica (un
po’ meno consueta), cercando di cogliere analogie strutturali e rappresentazioni ‘parallele’ basate su un approccio
unificato ai concetti geometrici – diversificati per ciascuna – di angolo normalizzato e di grado radiante. Comunque,
il tema della Goniometria Iperbolica resta il filo conduttore.
____________________
Siano ξ e ρ , semirette uscenti da uno stesso punto ordinario, il polo, nel piano euclideo E ; ξ sia la semiretta di
riferimento e ρ , il raggio vettore, la semiretta di direzione variabile rispetto alla direzione fissa di ξ .
Si assuma, come definizione primitiva di angolo (piano) orientato, il sotto-insieme illimitato di E compreso tra le
due semirette (i lati dell’angolo), generata ruotando ρ , vincolata al polo, anti-orariamente ( + ) od orariamente ( − ) a
partire dalla configurazione di sovrapposizione con ξ (angolo di misura, o ampiezza, nulla).
Si definisce settore angolare il sotto-insieme di angolo piano che contiene il polo e che sottende un arco γ di sezione
conica centrata nel polo. L’arco γ è chiamato il supporto (finito) dell’angolo.
Poiché il polo è un punto euclideo ordinario, un tale supporto non può essere un ramo di parabola – avendo, questa, il
centro all’infinito – ma solo un ramo di ellisse o di iperbole (coniche a-centro).
Per ragioni complessive di consistenza e di semplicità, γ è scelto normomorfo, i.e.,
●
●
●
è rappresentato dall’equazione cartesiana ristretta di una conica a-centro in forma canonica;
ha il semi-asse focale, X + , coincidente con la semiretta ξ di riferimento angolare e i segmenti coniugati di
simmetria – indicati comunemente con a e b – congruenti tra loro;
γ è percorribile con continuità, simmetricamente rispetto a X + , ed è generalmente regolare.
Ne segue che un supporto ellittico normomorfo è un arco di circonferenza, γ ≡ C , mentre un supporto iperbolico
normomorfo è un arco di ramo destro di iperbole equilatera, γ ≡ H + .
Tali supporti angolari corrispondono alle sole due possibili goniometrie in
equilatera (per brevità, iperbolica).
E , quella circolare e quella iperbolico-
Tutti gli angoli in E sono associabili a una goniometria circolare ma non tutti a una goniometria iperbolica. La
ragione di ciò è geometricamente evidente: il supporto circolare C può includere qualsiasi direzione del raggio
vettore mentre il supporto iperbolico H + può includere, al più, un angolo asintoticamente retto ( ∈ ( − 45° , 45° ) )
rispetto alla semiretta ξ ≡ X + di riferimento.
In coerenza con la definizione primitiva di angolo come sotto-insieme (illimitato) del piano E , l’ampiezza operativa
di un angolo si definisce normalizzando – i.e., riducendo al finito – l’area del settore angolare – sia circolare sia
+
iperbolico – vs. l’area (1 /2) a ⋅ a ≡ a 2 / 2 , essendo a ∈ R la distanza del polo dal punto di intersezione tra γ e X +
(i.e., o la misura del raggio di γ ≡ C o l’ascissa del vertice di γ ≡ H + ).
Pertanto, si assegna convenzionalmente l’area normalizzata a 2 /2 all’ampiezza di 1 grado radiante, circolare ( 1
rad) o, rispettivamente, iperbolico ( 1 radh).
■
Un modello strutturale della Goniometria Iperbolica –
3
GONIOMETRIA CIRCOLARE (non-normalizzata)
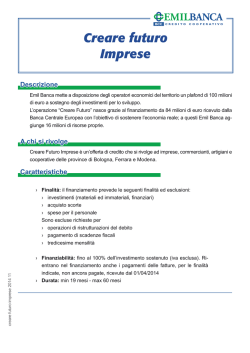
Dall’equazione del supporto circolare massimale C di raggio a , v. Fig. 1,
x2 + y2 = a2 ,
si individuano i punti A ≡ (a ; 0) e P ≡ (x ; y ) := (a cos ϕ ; a sin ϕ ) ≡ (OH ; PH ) .
Fig. 1
La similitudine OAT ∻ OHP implica la proporzione AT : PH = OA :OH ; da questa, passando
sin ϕ
AT
a
, i.e., AT = a
:= a tan ϕ ≡ a (y /x ) .
alle misure dei lati, si scrive
=
cos ϕ
a sin ϕ
a cos ϕ
Quindi, poiché T ≡ (a ; a tan ϕ ) , ϕ = tan −1 (y /x ) , si deducono tutte le identità della Goniometria
Circolare sia diretta che inversa.
di area K
Ampiezza ϕ del settore circolare OAP
C
Si definisca, in mediante la funzione tan −1 ,
ϕ :=
KC
2
a /2
≡ tan −1 (y /x ) .
(1)
Dall’Eq. (1), risulta che,
il grado radiante circolare, rad, è l’unità di misura operativa dell’ampiezza ϕ di un angolo al
centro di C . 1 rad è congruente a un settore circolare di area K C = a 2 /2 .
Pertanto, l’unità rad è riferita, direttamente\inversamente alle funzioni goniometriche circolari
inverse\dirette ( tan , cos −1 , etc. ). Ad esempio, con la scrittura ϕ = cos −1 u , si intende che il valore
ϕ è espresso in gradi radianti circolari.
Un modello strutturale della Goniometria Iperbolica –
4
Consistentemente con l’Eq. (1), si giustifica il calcolo classico
K C = area del triangolo OHP + area del semi-segmento circolare HAP
a
a
1
1
|xy | + ∫ |y (t ) | dt = |xy | + ∫ (a 2 − t 2 )1 / 2 dt
x
x
2
2
a
1
1
= |xy | + (t (a 2 − t 2 )1 / 2 + a 2 sin −1 (t /a ) )
x
2
2
2
1
1
a π
a2
a cos ϕ
−1 x
= |xy | − |xy | +
sin
cos −1
−
≡
2 2
2
2
2
a
a
a2
a2
=
ϕ ≡
tan −1 (y /x ) .
2
2
=
(2)
■
Un modello strutturale della Goniometria Iperbolica –
5
GONIOMETRIA IPERBOLICA (non-normalizzata)
Dall’equazione algebrica di 2.o grado
x 2 − y2 = a2 ,
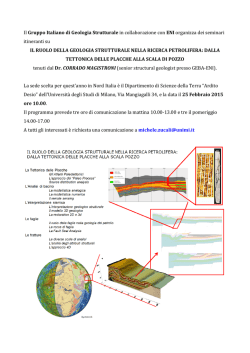
con a ∈ R + , si esplicita la restrizione x = (y 2 + a 2 )1 / 2 , rappresentativa del supporto iperbolico
(v. Fig. 2), soggetta, in R , alla condizione |y | < x . Su H + , si individuano i
ˆ .
punti A ≡ (a ; 0) e P ≡ (x ; y ) := (a coshη ; a sinhη ) ≡ (OH ; PH ) , con η ≡ POH
massimale H
+
L’introduzione dei simboli cosh , sinh e di quelli dedotti successivamente ( tanh , cosh −1 , etc.) va
intesa, per ora, in senso formale, motivata unicamente da una ricerca di analogia con le funzioni
goniometriche circolari ma ignorando le connessioni fondamentali esprimibili, come si vedrà,
attraverso le funzioni esponenziali η ֏ e ±η .
Fig. 2
La similitudine OAT ∻ OHP implica la proporzione AT : PH = OA :OH : da questa, passando
sinhη
AT
a
, i.e., AT = a
:= a tanhη ≡ a (y /x ) .
alle misure dei lati, si scrive
=
coshη
a sinh η
a cosh η
Segue che T ≡ (a ; a tanhη ) e η = tanh −1 (y /x ) .
di area Ω
Ampiezza η del settore iperbolico OAP
H
Si definisca, mediante la funzione tanh −1 ,
η :=
Dall’Eq. (3), risulta che
ΩH
a 2 /2
≡ tanh −1 (y /x ) .
(3)
Un modello strutturale della Goniometria Iperbolica –
6
il grado radiante iperbolico, radh, è l’unità di misura operativa dell’ampiezza η di un angolo
ˆ di H + . 1 radh è congruente a un settore iperbolico di area Ω = a 2 /2 .
al centro OAP
H
Pertanto, l’unità radh è riferita, direttamente\inversamente alle funzioni goniometriche iperboliche
inverse\dirette ( cosh , csch − 1 , etc.). Ad esempio, con la scrittura η = csch −1 u , si intende che il
valore η è espresso in gradi radianti iperbolici.
Consistentemente con l’Eq. (3), nel semipiano [a , + ∞ ) ×Y , si giustifica il calcolo classico
Ω = area del triangolo OHP − area del semi-segmento iperbolico PAH
H
=
x
a
1
1
x |y | − ∫ |y (t ) | dt = x |y | − ∫ (t 2 − a 2 )1 / 2 dt
a
x
2
2
=
1
1
x |y | − (t (t 2 − a 2 )1 / 2 − a 2 ln (t + (t 2 − a 2 )1 / 2 ) )
2
2
1/2
=
a2
x +y
a 2 (x + y )2
≡
ln 2
ln
2 (x − y 2 )1 / 2
2 x 2 − y2
=
a2
2
=
a2
2
a
=
x
1
1
a2 x +y
x |y | − x |y | +
ln
2
a
2
2
1 x +y
2 ln x − y
2
a2
1 1 + y /x a
−1
ln
≡
tanh
(
/
)
≡
y
x
η,
2 1 − y /x
2
2
(4)
in analogia formale completa con l’Eq. (2).
____________________
Dunque, sembra plausibile l’ipotesi della definibilità di una Goniometria Iperbolica in R , analoga
strutturalmente e operativamente a quella Circolare.
Una linea meditata di procedimento suggerisce l’individuazione di rappresentazioni per le funzioni
cosh e sinh tali che i valori delle coordinate cartesiane (x ; y ) ≡ (a coshη ; a sinhη ) del generico
punto P ∈ H + risultino composte appropriatamente attraverso una singola funzione elementare
η ֏ w (η ) dell’ampiezza iperbolica η . Inoltre, è auspicabile che la richiesta di consistenza tra il
modello ipotizzato di Goniometria Iperbolica e il grafico di H + possa essere soddisfatta mediante
espressioni le più semplici possibile per le funzioni composte η ֏ x (w (η )) e η ֏ y (w (η )) .
La rappresentazione canonica x 2 − y 2 = a 2 di H
+
x / a + y /a =
è separabile nella forma equivalente
1
.
x /a − y /a
(5)
L’uguaglianza (5) evidenzia il vincolo di uguaglianza della somma dei valori di funzioni composte
attraverso la funzione (sperabilmente) elementare w – ancora ignota – con il reciproco della loro
differenza. Poiché tale vincolo deve valere ∀ η ∈ ( − π / 4 rad , π / 4 rad) ≡ (− ∞ radh , + ∞ radh) ,
i.e., ∀ η (in radh) ∈ R , si fissano le definizioni
x /a + y /a := w (η ) ,
∀η ∈ R .
x /a − y /a := 1/w (η ) ,
(6)
Sul grafico di H + , x ≡ x (η ) è invariante nella riflessione assiale η ֏ −η mentre y ≡ y (η ) si
trasforma in − y (η ) . Pertanto, da 1 /w (η ) ≡ x /a + ( − y )/a , si deduce il carattere esponenziale
della funzione w al variare del suo argomento η : 1/w (η ) ≡ w ( − η ) .
Risolvendo rispetto a x e a y , il sistema (6) dà
Un modello strutturale della Goniometria Iperbolica –
w (η ) + 1/w (η )
w (η ) + w (−η )
x
a
a
=
≡
≡ x (η ) ,
2
2
y = a w (η ) − 1/w (η ) ≡ a w (η ) − w (−η ) ≡ y (η ).
2
2
7
(7)
Le rappresentazioni (7) delle coordinate cartesiane dei punti del grafico di H + mostrano che, vs.
il parametro η , η ֏ x (η ) è una funzione pari mentre η ֏ y (η ) è una funzione dispari; in altre
parole, esse costituiscono, rispettivamente, la componente pari e la componente dispari di w .
Riepilogando le caratteristiche risultanti di w , si ha che
w (η ) ∈ R + ,
1/w (η ) ≡ w ( −η ) ,
0
(almeno) ,
w (η ) ∈ C (R )
↑
w ∈M
(crescente).
(8)
Infatti,
•
la condizione w ∈ R + segue dall’essere x ≡ a (w + 1/w )/2 ≥ a , i.e., (w + 1/w )/2 ≥ 1 ;
•
della seconda, si è già detto circa il suo carattere esponenziale vs. η ∈ R ;
•
la continuità e la crescita monotòna (∴M ↑ ) di x in [a , + ∞ ) implicano la continuità e la
crescita monotòna di w vs. η ∈ R .
Ovviamente, anche la variabile reciproca 1/w (η ) ∈ R + risulta definita e continua in R benché
decrescente ( ∈M ↓ ). Inoltre, sup w = sup (1/w ) = + ∞ mentre inf w = inf (1/w ) = 0 + .
η ∈R
η ∈R
η ∈R
η ∈R
Ora, la richiesta che le variazioni continue di x ∈ [a , + ∞ ) e di y ∈ R siano rappresentabili dalle
composizioni (7) di un’unica funzione elementare η ֏ w (η ) che soddisfi le proprietà (8) rende
sostanzialmente obbligata la scelta di una funzione esponenziale con base > 1 .
La definizione convenzionale η ֏ w (η ) := e η nelle Eq. (7) soddisfa identicamente l’Eq. (4).
Pertanto, ∀ (x ; y ) ∈ H + , si definiscono
e η + e −η
x ≡ a coshη := a
2
−η
η
y ≡ a sinhη := a e − e
2
.
(9)
Insieme con le rappresentazioni dei valori delle funzioni sinh e cosh , le Eq. (9) forniscono
immediatamente la definizione della funzione tanh e la sua limitazione principale,
−1 <
y
e η − e −η
≡ tanhη = η
x
e + e −η
e 2η − 1 1 − e − 2η
≡
< 1.
≡ 2η
− 2η
e +1 1+e
(10)
Dunque, le definizioni (9) e il calcolo integrale di Ω H precedente risultano chiusi rispetto alla
definizione geometrica fondamentale (2), fissando la legittimità di una Goniometria Iperbolica
strutturata e formulata in modo completamente analogo a quella Circolare.
■
Un modello strutturale della Goniometria Iperbolica –
8
La Funzione di Gudermann
La Funzione di Gudermann (†) (o gudermanniana o ampiezza iperbolica), gd , è un’applicazione
trascendente che connette, direttamente in R , mediante composizione, le funzioni circolari con
quelle iperboliche. In tal modo, essa costituisce un’alternativa interessante – benché meno nota e
agevole – alle Formule di Euler, evitando il ricorso a rappresentazioni in C .
La definizione,
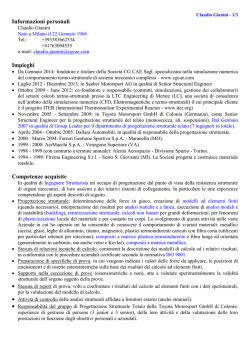
x ֏ gd x := 2 tan −1 (e x ) − π /2 ,
(11)
indica che gd ∈ C ∞ (R ) , è una funzione con codominio principale ( − π /2 , π /2) , limitata, dispari,
monotòna ∈M ↑ e, quindi, invertibile. La simmetria centrale di graf ( gd ) , v. Fig. 3, è verificata
facilmente notando, dall’identità
tan −1 (e − x ) ≡ cot −1 (e x ) ≡ π /2 − tan −1 (e x ) ,
La funzione x ֏ gd x ≡ y (ramo principale)
che gd è una funzione dispari vs. il suo argomento:
gd (− x ) = 2 (π /2 − tan −1 (e x )) − π /2
= − (2 tan −1 (e x ) − π /2) ≡ − gd x .
(11.1)
Il valore y ≡ gd x è chiamato il gudermanniano di
x o l’ampiezza iperbolica di x .
____________________
La funzione inversa, x ֏ gd − 1 x , è esprimibile, in
forma simmetrica rispetto alla bisettrice del 1.o e del
3.o quadrante cartesiano, con l’applicazione ∈M ↑ ,
dispari e periodica
Fig. 3
tan (x /2) + 1
x ֏ gd −1 x ≡ ln (tan (x /2 + π / 4)) ≡ ln
≡ ln ( sec x + tan x ) ,
1 − tan (x /2)
(12)
avente l’intervallo ( − π /2 , π /2) come dominio principale, a frontiera asintotica (v. Fig. 4, p. 11).
Invertendo l’Eq. (11) vs. la funzione tan −1 , si trova che
e x = tan ((1/2) gd x + π / 4)
(13)
e −x = tan ((1/2) gd (− x ) + π / 4) = − tan ((1/2) gd x − π / 4) .
(14)
e, mediante le Eq. (13) e (11), che
Ora, tenendo presente l’identità goniometrica
tan (α − π / 4) ≡
si scrive
tan α − 1
,
1 + tan α
(15)
Un modello strutturale della Goniometria Iperbolica –
tanh
x
e x /2 − e −x /2
e − x / 2 (e x − 1)
tan ((1/2) gd x + π / 4) − 1
,
≡ x /2
≡
≡
−x / 2
−x /2
x
2 e +e
tan ((1/2) gd x + π / 4) + 1
e
(e + 1)
= tan ( (1/2) gd x ) ,
9
dall’Eq. (13),
dall’identità (15), nella quale sia α ≡ (1/2) gd x + π / 4 .
Quindi, eseguendo la dilatazione x ֏ 2x , si arriva all’uguaglianza fondamentale
tanh x = tan ((1/2) gd (2x )) .
(16)
Con la posizione y := (1/2) gd (2x ) nell’Eq. (16), insieme con quella inversa x ≡ (1/2) gd −1 (2y ) ,
ed eseguendo, infine, lo scambio x y , si ottiene la relazione simmetrica
tan x = tanh ((1/2) gd −1 (2x )) .
(17)
A loro volta, le Eq. (13) e (14) sono le generatrici delle relazioni di trasformazione in R tra le
Funzioni Iperboliche e quelle Circolari.
Ad esempio, posto η := gd x , risulta
e x − e −x
1
= (tan (η /2 + π / 4) + tan (η /2 − π / 4))
2
2
1 tan (η /2) + 1 tan (η /2) − 1
2 tan (η /2)
=
+
=
2 1 − tan (η /2) 1 + tan (η /2) 1 − ( tan (η /2) )2
sinh x ≡
≡ tan η ≡ tan ( gd x ) ≡ (tan gd ) (x ) .
Con le altre cinque identità, determinate facilmente in modo analogo dalle forme esponenziali
rispettive, si completa la tabella seguente:
cosh x ≡ sec ( gd x )
sinh x ≡ tan ( gd x )
sech x ≡ cos ( gd x )
csch x ≡ cot ( gd x ) .
tanh x ≡ sin ( gd x )
coth x ≡ csc ( gd x )
(18)
La posizione y := gd x , a destra nelle Eq. (18), e dell’inversa (biunivoca) x ≡ gd −1 y , a sinistra,
seguita dallo scambio x y , generano la tabella delle relazioni simmetriche di connessione:
cos x ≡ sech ( gd −1 x )
sec x ≡ cosh ( gd −1 x )
sin x ≡ tanh ( gd −1 x )
csc x ≡ coth ( gd −1 x ) .
tan x ≡ sinh ( gd −1 x )
cot x ≡ csch ( gd −1 x )
(19)
Le tabelle (18) e (19) consentono la ri-scrittura di tutte le identità goniometriche, sia circolari che
equilatero-iperboliche, prendendo i valori delle funzioni gd e gd −1 come argomenti.
Ad esempio, le varie identità quadratiche – immediatamente riconoscibili – assumono le forme
seguenti:
( sech ( gd −1 x ))2 + (tanh ( gd −1 x ))2 = 1 ,
−1
2
−1
2
−1
2
−1
2
−1
2
−1
2
(20.1)
(cosh ( gd x )) − ( sinh ( gd x )) = 1 ,
(20.2)
(coth ( gd x )) − (csch ( gd x )) = 1 ,
(20.3)
−1
−1
(cosh ( gd x )) + (coth ( gd x )) = (cosh ( gd x )) ⋅ (coth ( gd x )) ;
(20.4)
( sec ( gd x ))2 − (tan ( gd x ))2 = 1 ,
(20.5)
( sin ( gd x )) + (cos ( gd x )) = 1 ,
(20.6)
2
2
2
2
Un modello strutturale della Goniometria Iperbolica –
10
(csc ( gd x ))2 − (cot ( gd x ))2 = 1 ,
(20.7)
(cot ( gd x ))2 − (cos ( gd x ))2 = (cot ( gd x ))2 ⋅ (cos ( gd x ))2 .
(20.8)
■
____________________
Funzioni Derivate
Operando direttamente sulle definizioni, Eq. (11) e (12), si calcolano
d
d
2
gd x ≡
(2 tan −1 (e x ) − π /2) = x
≡ sech x ,
dx
dx
e + e −x
1
1
d
d
x ֏
gd −1 x ≡
ln (tan (x /2 + π / 4)) = … =
≡
≡ sec x .
dx
dx
sin (x + π /2)
cos x
x ֏
(21)
(22)
Quindi, incominciando dalle Eq. (21) e (22) e avvalendosi del Teorema Fondamentale del Calcolo
Integrale, si deducono prontamente le seguenti
Rappresentazioni Integrali
gd x ( ≡ 2 tan −1 (e x ) − π /2) =
∫
x
0
sech u du ,
gd −1 x ( ≡ ln ( tan (x /2 + π / 4))) =
∫
x
0
(23)
sec u du .
(24)
In intervalli compatti appropriati, dove sia garantita la convergenza uniforme, esistono le seguenti
Espansioni in Serie di Funzioni
Invertendo l’Eq. (16) ed eseguendo, quindi, la compressione x ֏ x /2 , risulta
gd x = 2 tan −1 (tanh (x /2)) =
+∞
∑
n =0
( − 1)n
(tanh (x /2))2n + 1 ,
2n + 1
(25)
dove, tanh (x /2) ∈ ( − 1, 1) . In particolare, quando x ∈ [x 1 , x 2 ] ⊂ ( − π /2 , π /2) , l’espansione (25)
è equivalente alla rappresentazione in serie di potenze
gd x =
+∞
Ε 2n
∑ (2n + 1)! x
2n + 1
n =0
1
1
61 7
277 9
50521 11
≡ x − x3 + x5 −
x +
x −
x +… ,
6
24
5040
72566
39916800
(25.1)
nella quale, Ε 2n indica il 2 n - simo numero di Euler.
Analogamente, invertendo l’Eq. (17) e facendo seguire la compressione x ֏ x /2 , si ha
gd −1 x = 2 tanh −1 (tan (x /2)) =
+∞
1
∑ 2n + 1 (tan (x /2))
2n + 1
,
(26)
n =0
essendo tan (x /2) ∈ ( − 1, 1) , i.e., x ∈ ((2k − 1)π /2 , (2k + 1)π /2) , ∀ k ∈ Z . In particolare, nel
caso in cui è x ∈ [x 1 , x 2 ] ⊂ ( − π /2 , π /2) , l’espansione (26) equivale alla rappresentazione in serie
Un modello strutturale della Goniometria Iperbolica –
11
di potenze
−1
gd x =
+∞
∑
(− 1)n Ε 2n
x 2n + 1
(2n + 1)!
1
1
61 7
277 9
50521 11
≡ x + x3 + x5 +
x +
x +
x +… .
6
24
5040
72566
39916800
n =0
(26.1)
Infine, dalle Tabelle (18) e (19), dovrebbe risultare del tutto evidente quali siano, per x = o (1) , le
espansioni in serie di potenze di x ֏ sec ( gd x ) o di x ֏ coth ( gd −1 x ) , etc. .
____________________
Il procedimento classico di L. Euler per la determinazione delle
espansioni (25.1) e (26.1) è discusso, in dettaglio e con esempi
numerosi, nell’Unità tematica dell’autore: La generazione di
Fig. 4
serie di potenze reali dalle Funzioni di Bernoulli e di
Euler, Eq. (61) e (62), raggiungibile dalla home-page.
La funzione x ֏ gd − 1 x ≡ y (ramo principale)
■
____________________
( †)
Christoph Gudermann (1798-1852), studioso delle Funzioni Iperboliche, delle Funzioni Sferiche Speciali e delle
Funzioni Ellittiche, docente e guida influente di K. W. T. Weierstrass giovane all’Accademia di Münster.
Un modello strutturale della Goniometria Iperbolica –
12
Conversioni rad radh
Dal grafico di H + , risulta evidente la corrispondenza biunivoca
tanη ≡ AT /a ≡ tanhη ,
(27)
nella quale, non sembra inutile ribadirlo, è inteso che la funzione tan opera sull’argomento η
riconoscendolo come espresso in rad mentre la funzione tanh opera sullo stesso argomento η
riconoscendolo, invece, come espresso in radh.
Invertendo l’identità (27) bilateralmente e ricorrendo alla Funzione di Gudermann e alla sua
inversa si scrivono le formule di conversione, reciprocamente inverse,
η (in radh) = tanh −1 (tanη ) ≡ tanh −1 (tanh ((1/2) gd −1 (2η ))) ≡ (1/2) gd −1 (2η )
= (1/2) ln (tan (η (rad) + π / 4)) ;
(28.1)
η (in rad) = tan −1 (tanhη ) ≡ tan −1 (tan ((1/2) gd (2η ))) ≡ (1/2) gd (2η ) gd (2η )
= tan −1 (e 2η (radh) ) − π / 4 .
(28.2)
____________________
Esempi:
•
tan − 1 (tanh (1 radh)) ≈ 0.65088 rad ≈ (26π /25) rad ≈ 37°17 ′34′′ ;
•
tan −1 (tanh (− π radh)) ≈ − 0.78353 rad ≈ − (499 π /2000) rad ( > − π / 4 rad ) ≈ − 44°53′35′′ ;
•
tanh −1 (tan ( − π / 6 rad)) ≈ − 0.65848 radh ;
•
tanh −1 (tan (44°59′59′′)) ≈ 6.11846 radh ;
•
tanh −1 (tan ( − 2π /5 rad)) ∉ R ;
perché tan (− 2π /5 rad) ≡ − tan 72° = − (5 + 2 5 )1/ 2 < − 1 ≡ tan (− π / 4 rad) ;
•
•
lim
tanh −1 (tanη ) = ± ∞ radh ;
lim
tan −1 (tanhη ) = ± π / 4 rad .
η → ± π / 4 rad
η → ± ∞ radh
■
Un modello strutturale della Goniometria Iperbolica –
13
Completamento delle rappresentazioni geometriche
1.
Con riferimento alla Fig. 5,
Fig. 5
la similitudine OBQ ∻ OGP implica la proporzione BQ :OB = GP :OG , i.e., in termini
delle misure dei segmenti, si ha
BQ
GP
=
a
OG
≡
a cos ϕ
:= cot ϕ . Segue che
a sin ϕ
BQ = a cot ϕ ;
(29)
la similitudine OPS ∻ OHP implica la proporzione OS : OP = OP : OH , la quale, in
2
termini delle misure dei segmenti, corrisponde al prodotto rettangolare OP = OS ⋅OH , i.e.,
a 2 = OS ⋅a cos ϕ . Segue che
OS =
a
:= a sec ϕ ;
cos ϕ
(30)
la similitudine OPK ∻ OGP implica la proporzione OK :OP = OP :OG che, in termini
2
delle misure dei segmenti, corrisponde al prodotto rettangolare OP = OK ⋅OG , i.e.,
a 2 = OK ⋅a sin ϕ . Segue che
OK =
a
:= a csc ϕ .
sin ϕ
(31)
Si osservi l’allineamento dei punti P , Q e T sulla retta rOP : il punto Q si sposta davanti, o
dietro, al punto T , secondo come varia l’ampiezza circolare ϕ .
Un modello strutturale della Goniometria Iperbolica –
2.
14
Con riferimento alla Fig. 6,
ˆ , e A ≡ (a ; 0) , si consideri il
oltre ai punti P ≡ (x ; y ) ≡ (a coshη ; a sinhη ) , con η ≡ POM
punto B ≡ (0 ; a ) , allineato con i punti Q e F sulla retta y = a . Siano K e H , le proiezioni
ortogonali di Q e di P , rispettivamente, sull’asse X .
La similitudine OKQ ∻ OHP implica la proporzione OK :OH = KQ : HP , i.e., in termini
di misure dei segmenti, si ha
OK
KQ
a
=
≡
. Segue che
a coshη
a sinhη
HP
OK =
a cosh η
:= a cothη .
sinhη
(32)
Inoltre, costruito il triangolo OFM , rettangolo in F ≡ (a coshη ; a ) , il 2.o Teorema di
2
Euclide determina il quadrato FH = OH ⋅ HM , i.e., a 2 = a coshη ⋅ HM , da cui, si ha
HM =
a
:= a sech η .
cosh η
(33)
Analogamente, costruito il triangolo OGN , rettangolo in G ≡ (a ; a sinhη ) , poiché vale il
2
quadrato SG = OS ⋅ SN , i.e., a 2 = a sinhη ⋅ SN , risulta
SN =
a
:= a cschη .
sinhη
(34)
Fig. 6
Analogamente, si osservi l’allineamento dei punti P , Q e T sulla retta rOP . Come nel caso
circolare, il punto Q si sposta davanti, o dietro, al punto T , secondo come varia l’ampiezza
iperbolica η .
Qui di seguito, è riportato l’elenco degli elementi significativi nella costruzione geometrica
mostrata nella Fig. 6:
Un modello strutturale della Goniometria Iperbolica –
15
assegnato il punto P ≡ (x ; y ) ≡ (a coshη ; a sinhη ) ∈ H + , si determinano facilmente
A ≡ (a ; 0 ) ,
K ≡ (ax /y ; 0) ,
H ≡ (x ; 0 ) ,
M ≡ (x + a 2 /x ; 0) ,
B ≡ (0 ; a ) ,
S ≡ (0 ; y ) ,
N ≡ (0 ; y + a 2 /y ) ,
G ≡ (a ; y ) ,
T ≡ (a ; y / x ) ,
Q ≡ (ax /y ; a ) ,
rOTQP : y = (y /x ) x ,
rATG : x = a ,
rBQF : y = a ,
rOF : y = (a /x ) x ,
rFM : y = − (x /a ) x + x 2 /a + a ,
rOG : y = (y /a ) x ,
rNG : y = − (a /y ) x + a 2 /y + y .
F ≡ (x ; a ) ;
■
Un modello strutturale della Goniometria Iperbolica –
16
Funzioni su dominî ristretti in R
Sia f : D ( ⊆ R ) ֏ C ( ⊆ R ) .
Quando esiste, si definisce determinazione principale di f la funzione-restrizione generalmente
monotòna,
f |D0 : D0 ֏ C ,
a un sotto-dominio proprio convenzionale D0 ⊂ D , detto l’insieme principale di definizione di
f . Ciò implica, generalmente, che ∃! ( f |D0 ) −1 : C ֏ D0 (vs. D0 , generalmente significa: eccetto,
al più, che per un numero finito di elementi x ∈ D0 ). (†)
Dunque, se la restrizione f |D0 è definibile, essa conserva il co-dominio C originario, risultando
generalmente bi-iettiva tra D0 e C .
Nella specificazione di D0 , si conviene di determinare f |D0 così che l’insieme graf f |D0 , detto il
ramo principale di graf ( f ) , sia simmetrico o anti-simmetrico rispetto ad almeno uno degli assi
del riferimento cartesiano e, possibilmente, che 0 ∈ D0 (≡ D0 ∪ ∂ D0 ) ( D0 indica la chiusura di
D0 , inclusiva della frontiera ∂ D0 ). Da ciò, segue che la stessa specificazione della monotonìa di
f in D0 (crescita o decrescita in senso stretto generalmente) corrisponde a criteri di simmetria
assiale o centrale evidenti.
Il valore y ≡ f (x ) , per x ∈ D0 , costituisce un valore principale di f .
Salvo specificazione diversa, le operazioni analitiche formali su f , in primo luogo, le derivazioni
e le integrazioni, sono riferite convenzionalmente a D0 .
Le tabelle alle p. 17-19 riportano gli insiemi prodotto cartesiano D0 × C delle funzioni-restrizione
trascendenti fondamentali, nella rappresentazione esplicita consueta x ֏ f |D0 (x ) ≡ y .
I grafici rispettivi di tali funzioni – salvo quelli delle Funzioni Esponenziale, Logaritmica e di
Gudermann diretta e inversa (v. p. 8 e 11) – si trovano alle pagine successive 20-23.
■
____________________
( †)
Riguardo all’impostazione generale dell’argomento e alla terminologia, ci si ispira, regolarmente, al lavoro:
C. D. PAGANI - S. SALSA, ANALISI MATEMATICA, VOL. 1 & 2, ZANICHELLI.
Un modello strutturale della Goniometria Iperbolica –
17
Dominî e Codominî in R delle
Funzioni(-restrizione) trascendenti elementari
A.
Le Funzioni-restrizione Circolari dirette e inverse
x ֏ f |D0 (x ) ≡ y
D0 × C
x ֏ cos x
[ 0 , π ] × [ − 1 , 1]
x ֏ cos −1 x
[ − 1 , 1] × [ 0 , π ]
x ֏ sin x
[ − π /2 , π /2 ] × [ − 1 , 1]
x ֏ sin −1 x
[ − 1 , 1] × [ − π /2 , π /2 ]
x ֏ tan x :=
sin x
cos x
x ֏ tan −1 x
x ֏ cot x :=
cos x
sin x
x ֏ cot −1 x
x ֏ sec x :=
1
cos x
x ֏ sec −1 x
x ֏ csc x :=
1
sin x
x ֏ csc −1 x
( − π / 2 , π / 2) × ( − ∞ , + ∞ )
( − ∞ , + ∞ ) × ( − π / 2 , π / 2)
(0 , π ) × ( − ∞ , + ∞ )
( − ∞ , + ∞ ) × (0 , π )
{[ 0 , π /2 ) ∪ ( π /2 , π ]} × {( − ∞ , − 1 ] ∪ [ 1 , + ∞ )}
{( − ∞ , − 1] ∪ [1 , + ∞ )} × {[ 0 , π /2 ) ∪ ( π /2 , π ]}
{[ − π /2 , 0) ∪ (0 , π /2]} × {( − ∞ , − 1] ∪ [1 , + ∞ )}
{( − ∞ , − 1] ∪ [1 , + ∞ )} × {[ − π /2 , 0 ) ∪ ( 0 , π /2 ]}
Un modello strutturale della Goniometria Iperbolica –
B. Le Funzioni Esponenziale, Logaritmica e
le restrizioni Gudermanniane diretta e inversa
C.
x ֏ ex
( − ∞ , + ∞ ) × (0 , + ∞ )
x ֏ ln x
(0 , + ∞ ) × ( − ∞ , + ∞ )
x ֏ gd x := 2 tan − 1 (e x ) − π /2
( − ∞ , + ∞ ) × ( − π / 2 , π / 2)
x ֏ gd −1 x ≡ ln (tan (x /2 + π / 4))
( − π / 2 , π / 2) × ( − ∞ , + ∞ )
Le Funzioni Iperboliche dirette e inverse
e x + e −x
2
x ֏ cosh x :=
(
x ֏ cosh −1 x := ln x + x 2 − 1
x ֏ sinh x :=
[0 , + ∞ ) × [1 , + ∞ )
)
e x − e −x
2
(
x ֏ sinh −1 x := ln x + x 2 + 1
x ֏ tanh x :=
x ֏ coth x :=
(− ∞ , + ∞) × (− ∞ , + ∞)
)
e x − e −x
sinh x
≡ x
e + e −x
cosh x
x ֏ tanh −1 x :=
1 1+x
ln
2 1−x
cosh x
e x + e −x
1
≡ x
≡
−x
sinh x
e −e
tanh x
x ֏ coth − 1 x :=
1 x +1
ln
2 x −1
[1 , + ∞) × [0 , + ∞ )
(− ∞ , + ∞) × (− ∞ , + ∞)
( − ∞ , + ∞ ) × ( − 1 , 1)
( − 1 , 1) × ( − ∞ , + ∞ )
{( − ∞ , 0) ∪ (0 , + ∞ )} × {( − ∞ , − 1) ∪ (1 , + ∞ )}
{( − ∞ , − 1) ∪ (1 , + ∞ )} × {( − ∞ , 0) ∪ (0 , + ∞ )}
18
Un modello strutturale della Goniometria Iperbolica –
x ֏ sech x :=
1
2
≡ x
cosh x
e + e −x
x ֏ sech −1 x := ln
x ֏ csch x :=
( − ∞ , + ∞ ) × (0 , 1]
1 + 1 − x2
x
(0 , 1] × [0 , + ∞ )
1
2
≡ x
e − e −x
sinh x
1
x ֏ csch x := ln +
x
−1
1 + x2
|x |
19
{( − ∞ , 0) ∪ (0 , + ∞ )} × {( − ∞ , 0) ∪ (0 , + ∞ )}
{( − ∞ , 0) ∪ (0 , + ∞ )} × {( − ∞ , 0) ∪ (0 , + ∞ )}
■■■
Un modello strutturale della Goniometria Iperbolica –
I grafici delle Funzioni Circolari dirette e inverse
x ֏ cos x
x ֏ cos −1 x
x ֏ sin x
x ֏ sin −1 x
x ֏ tan x
x ֏ tan −1 x
20
Un modello strutturale della Goniometria Iperbolica –
x ֏ cot x
x ֏ cot −1 x
x ֏ sec x
x ֏ sec −1 x
x ֏ csc x
x ֏ csc −1 x
21
Un modello strutturale della Goniometria Iperbolica –
I grafici delle Funzioni Iperboliche dirette e inverse
x ֏ cosh x
x ֏ cosh −1 x
x ֏ sinh x
x ֏ sinh −1 x
x ֏ tanh x
x ֏ tanh −1 x
22
Un modello strutturale della Goniometria Iperbolica –
x ֏ coth x
x ֏ coth −1 x
x ֏ sech x
x ֏ sech −1 x
x ֏ csch x
x ֏ csch −1 x
23
Un modello strutturale della Goniometria Iperbolica –
24
L’inversione dei valori iperbolici in R
1.
Dalla definizione in R del valore parametrico
e η + e −η
,
2
k := coshη ≡
si ottiene l’equazione e 2η − 2 ke η + 1 = 0 . Risolvendola vs. e η , si determinano le radici reciproche
e η = k ± k 2 − 1 . Ovviamente, e η ∈ R + ⇒ k ∈ [ 1 , + ∞) . Quindi, per inversione, risultano
(
)
η ± = ln k ± k 2 − 1 .
Quale delle due η - rappresentazioni scegliere? Poiché i valori
(
)
η − ≡ ln k − k 2 − 1 ≡ − ln
1
k − k −1
2
(
)
≡ − ln k + k 2 − 1 ≡ −η +
sono opposti, si assume η + , convenzionalmente, come la rappresentazione principale di η .
Quindi,
(
)
cosh −1 k := ln k + k 2 − 1 ≡ η ;
2.
(35)
la definizione in R del valore parametrico
s := sinhη ≡
e η − e −η
,
2
genera l’equazione e 2η − 2seη − 1 = 0 , che, risolta vs. e η , fornisce le radici
s + s2 + 1,
∀s ∈ R ,
eη =
s − s 2 + 1 < 0 ⇒ η ∉ R .
Pertanto, dall’unica radice invertibile in R , la prima, si ottiene
(
)
sinh − 1 s := ln s + s 2 + 1 ≡ η ;
3.
(36)
dalla definizione in R del valore parametrico
τ := tanhη ≡
e η − e −η
e 2η − 1
( ≡ s /k ) ,
≡
e η + e −η
e 2η + 1
risulta e 2η = (1 + τ )/(1 − τ ) , ∀ τ ∈ ( − 1 , 1) . Quindi, invertendo e 2η vs. η , si trova
tanh −1τ :=
1 1 +τ
ln
≡ η;
2 1 − τ
(37)
Un modello strutturale della Goniometria Iperbolica –
4.
25
dalla definizione in R del valore parametrico
e η + e −η
e 2η + 1
q := cothη ≡ η
( ≡ 1/τ ≡ k /s ) ,
≡ 2η
e − e −η
e −1
risulta, e 2η = (q + 1)/(q − 1) , ∀ q ∈ ( − ∞ , − 1) ∪ (1 , + ∞ ) . Pertanto, invertendo e 2η vs. η , si trova
coth −1q :=
5.
1 q + 1
ln
≡η;
2 q − 1
(38)
assegnato il valore parametrico in R
σ := sechη ≡
2
2e η
≡
( ≡ 1/k ) ,
e η + e −η
e 2η + 1
risulta l’equazione σ e 2η − 2e η + σ = 0 . Risolvendola vs. e η , si determinano le radici reciproche
(
)
e η = 1 ± 1 − σ 2 σ , con il vincolo σ ∈ ( 0 , 1] . Quindi, per inversione, risultano
((
) )
η ± = ln 1 ± 1 − σ 2 σ .
Quale delle due η - rappresentazioni scegliere? Poiché le due radici,
((
) )
( (
η − ≡ ln 1 − 1 − σ 2 σ ≡ − ln σ 1 − 1 − σ 2
)) ≡ − ln ((1 +
) )
1 − σ 2 σ ≡ −η + ,
sono opposte, si assume η + , convenzionalmente, come la rappresentazione principale di η .
Quindi,
((
) )
sech −1 σ := ln 1 + 1 − σ 2 σ ≡ η ;
6.
(39)
assegnato il valore parametrico in χ ∈ R \{ 0 }
2
2e η
χ := cschη ≡ η
≡ 2η
( ≡ 1/s ) ,
e − e −η
e −1
se ne deduce l’equazione χ e 2η − 2e η − χ = 0 . uesta, risolta vs. e η , fornisce le radici
1+ 1+ χ2
, se χ ∈ ( 0 , + ∞ ) ,
χ
η
e =
1− 1+ χ2
, se χ ∈ ( − ∞ , 0 ),
χ
1
≡ +
χ
1+ χ2
.
|χ |
Pertanto, invertendo e η vs. η , segue che
1
csch χ := ln +
χ
−1
1+ χ2
|χ |
≡ η .
(40)
■■■
Un modello strutturale della Goniometria Iperbolica –
26
Identità Goniometriche Iperboliche in R
A. Funzioni Dirette
Riepilogo delle rappresentazioni esponenziali:
e x + e −x
,
2
2
1
,
sech x := x
≡
−x
e +e
cosh x
e x − e −x
,
2
2
1
,
csch x := x
≡
−x
e −e
csch x
cosh x :=
e x − e −x
sinh x
≡
,
x
−x
e +e
cosh x
tanh x :=
sinh x :=
1
e x + e −x
≡
coth x := x
;
e − e −x
tanh x
(41)
Dalle Rappresentazioni (41), seguono tutte le identità seguenti (se ne consiglia la verifica!):
identità moltiplicative:
cosh x = coth x ⋅ sinh x ,
tanh x = sinh x ⋅ sech x ,
sinh x = tanh x ⋅ cosh x ,
coth x = cosh x ⋅ csch x ,
sech x = tanh x ⋅ csch x ,
csch x = coth x ⋅ sech x ;
(42)
identità-quoziente:
coth x
,
csch x
cosh x
coth x =
,
sinh x
tanh x
,
sech x
csch x
sech x =
,
coth x
cosh x =
sinh x =
sinh x
,
cosh x
sech x
csch x =
;
tanh x
tanh x =
(43)
identità iperboliche quadratiche fondamentali:
( cosh x )2 − ( sinh x )2 = 1 ,
(tanh x )2 + ( sech x )2 = 1 ,
( coth x )2 − (csch x )2 = 1 ,
( csch x )2 − ( sech x )2 = ( csch x )2 ( sech x )2 ;
(44)
identità di somma\differenza angolare (in radh) iperbolica:
cosh (x ± y ) = cosh x ⋅ cosh y ± sinh x ⋅ sinh y ,
sinh (x ± y ) = sinh x ⋅ cosh y ± cosh x ⋅ sinh y ,
tanh x ± tanh y
sinh 2x ± sinh 2y
tanh (x ± y ) =
,
=
cosh 2x ± cosh 2y
1 ± tanh x ⋅ tanh y
coth (x ± y ) =
(45)
sinh 2x ∓ sinh 2y
1 ± cosh x ⋅ coth y
=
;
coth x ± coth y
cosh 2x − cosh 2y
identità di duplicazione iperbolica:
1
1 + (tanh x )2
,
= (cosh x )2 + ( sinh x )2 = 2 ( cosh x )2 − 1 = 1 + 2 ( sinh x )2 =
sech 2x
1 − (tanh x )2
1
2 tanh x
,
sinh 2x ≡
= 2 cosh x ⋅ sinh x =
csch 2x
1 − (tanh x )2
cosh 2x ≡
tanh 2x =
2 tanh x
,
1 + (tanh x )2
coth 2x =
(46)
1 + ( coth x )2
;
2 coth x
identità di triplicazione iperbolica:
cosh 3x = 4 (cosh x )3 − 3 cosh x = (1 + 4 ( sinh x )2 ) cosh x ,
sinh 3x = 4 ( sinh x )3 + 3 sinh x = (4 (cosh x )2 − 1) sinh x ,
(3 + (tanh x ) ) tanh x
,
1 + 3 (tanh x )2
2
tanh 3x =
(47)
(3 + ( coth x ) ) coth x
;
1 + 3 ( coth x )2
2
coth 3x =
Un modello strutturale della Goniometria Iperbolica –
27
identità di bi-sezione iperbolica:
cosh x + 1
,
2
cosh (x /2) =
sinh (x /2) = ±
cosh x − 1
,
2
tanh (x /2) = ±
cosh x − 1
cosh x − 1
sinh x
=
=
,
cosh x + 1
sinh x
cosh x + 1
coth (x /2) = ±
cosh x + 1
cosh x + 1
sinh x
=
=
;
cosh x − 1
sinh x
cosh x − 1
(48)
identità parametriche iperboliche:
posto τ := tanh (x /2) o, altrimenti, κ := coth (x /2) , seguono (condizionate!), rispettivamente
cosh x ≡
1
1 +τ 2
,
=
sech x
1 −τ 2
1
2τ
,
=
csch x
1 −τ 2
1
2τ
;
tanh x ≡
=
coth x
1 +τ 2
sinh x ≡
cosh x ≡
1
κ2 +1
= 2
,
sech x
κ −1
1
2κ
= 2
,
csch x
κ −1
1
2κ
= 2
;
tanh x ≡
coth x
κ +1
sinh x ≡
(49)
identità di prostaferesi iperbolica:
x +y
x −y
⋅ cosh
,
2
2
x +y
x −y
⋅ sinh
cosh x − cosh y = 2 sinh
,
2
2
x +y
x −y
⋅ cosh
sinh x + sinh y = 2 sinh
,
2
2
x +y
x −y
⋅ sinh
sinh x − sinh y = 2 cosh
,
2
2
cosh x + cosh y = 2 cosh
sinh (x ± y )
,
tanh x ± tanh y = (1 ± tanh x tanh y ) tanh (x ± y ) =
cosh x ⋅ cosh y
1 ± coth x ⋅ coth y
sinh (x ± y )
coth x ± coth y =
=
;
coth (x ± y )
sinh x ⋅ sinh y
(50)
-------------------------------------------------cosh x ± sinh x =
1 ± tanh (x /2)
= e ±x ;
1 ∓ tanh (x /2)
identità di Werner iperboliche:
cosh x ⋅ cosh y = (1 /2) ( cosh (x + y ) + cosh (x − y ) ) ,
sinh x ⋅ sinh y = (1/2) ( cosh (x + y ) − cosh (x − y ) ) ,
cosh x ⋅ sinh y = (1 /2) ( sinh (x + y ) − sinh (x − y ) ) ;
-------------------------------------------------cosh (x + y ) ⋅ cosh (x − y ) = (cosh x )2 + ( sinh y )2 = (cosh y )2 + ( sinh x )2 ,
sinh (x + y ) ⋅ sinh (x − y ) = (cosh x )2 − (cosh y )2 = ( sinh x )2 − ( sinh y )2 ;
(51)
Un modello strutturale della Goniometria Iperbolica –
28
le Identità Euleriane di connessione con le Funzioni Goniometriche Circolari Dirette seguono dall’Identità
Euleriana fondamentale
e ± i x ≡ cos x ± i sin x :
cosh ix = cos x ,
sinh ix = i sin x ,
cosh x = cos ix ,
sinh x = − i sin ix ,
tanh ix = i tan x ,
tanh x = − i tan ix ,
coth ix = − i cot x ,
coth x = i cot ix ,
sech ix = sec x ,
csch ix = − i csc x ,
sech x = sec ix ,
csch x = i csc ix .
(52)
(53)
A sua volta, l’Identità Euleriana fondamentale (52) è verificabile mediante le espansioni di Maclaurin specifiche, tutte
convergenti uniformemente in C :
+∞
∑
n =0
( ± ix )n
≡
n!
+∞
∑ (− 1)
n =0
n
+∞
x 2n
x 2n + 1
.
± i ∑ ( − 1)n
(2n )! n = 0
(2n + 1)!
(53.1)
La convergenza uniforme delle serie di potenze nella rappresentazione (53.1) è condizione sufficiente per la verifica
termine-a-termine dell’uguaglianza. L’algebra è un po’ noiosa ma diretta; per tale scopo, va ricordata la regola ciclica,
valida ∀ n ∈ Z ( n mod 4 ),
i 4n = 1 ,
i 4n + 1 = i ,
i 4n + 2 = − 1 , i 4n + 3 = − i .
Un modello strutturale della Goniometria Iperbolica –
29
Altre identità possono essere dedotte combinando opportunamente le relazioni generali nelle due tabelle seguenti per
le rappresentazioni di ciascuna Funzione Iperbolica Diretta mediante qualsiasi altra Funzione Iperbolica Diretta:
f ≡ cosh
f ≡ sinh
cosh x =
cosh x
1 + ( sinh x )2
sinhx =
± ( cosh x )2 − 1
sinh x
tanhx =
±
( cosh x )2 − 1
cosh x
sinh x
f ≡ tanh
1
tanh x
cschx =
±
cothx =
±
tanh x
1
1 − (tanh x )2
1 + ( sinhx )2
1
( coshx ) − 1
2
cosh x
( cosh x ) − 1
2
f ≡ sech
1
sechx
coshx =
1 − (tanh x )2
1 + ( sinh x )2
1
coshx
sechx =
1 − (tanhx )2
±
1 − ( sech x )2
sech x
sinhx =
±
tanhx =
± 1 − ( sech x )2
sechx =
sechx
1
sinh x
1 − (tanh x )2
tanh x
1 + ( sinh x )2
sinh x
1
tanh x
f ≡ csch
f ≡ coth
( csch x )2 + 1
csch x
1
csch x
±
±
1
cschx =
±
cothx =
±
csch x
( csch x ) + 1
2
sech x
1 − ( sech x )2
csch x
( coth x )2 − 1
1
( cothx )2 − 1
1
coth x
( cschx )2 + 1
±
coth x
±
( coth x )2 − 1
coth x
± ( coth x )2 − 1
1
1 − ( sechx )2
( csch x )2 + 1
cothx
L’ambiguità di segno eventuale in un’espressione, ± , implica, rispettivamente, x ≷ 0 .
■
Un modello strutturale della Goniometria Iperbolica –
30
B. Funzioni Inverse
Riepilogo delle rappresentazioni logaritmiche (nei dominî principali rispettivi)
(
)
cosh − 1 x := ln x + x 2 − 1 ,
sinh − 1 x := ln x + x 2 + 1 ,
tanh − 1 x :=
1 + 1 − x2
,
sech − 1 x := ln
x
1 1 + x2 + 1
,
csch − 1 x := ln +
|x |
x
1 1+ x
ln
,
2 1 − x
coth − 1 x :=
1 x + 1
;
ln
2 x − 1
(
)
(54)
Applicando le proprietà logaritmiche elementari alle Identità (46), si ricavano le
identità di somma\differenza seguenti (se ne consiglia la verifica!):
(
)
cosh − 1 x ± cosh − 1 y = cosh − 1 xy ± (x 2 − 1) (y 2 − 1) ,
(
)
sinh − 1 x ± sinh − 1 y = sinh − 1 x y 2 + 1 ± y x 2 + 1 ,
x ±y
tanh − 1 x ± tanh − 1 y = tanh − 1
;
1 ± xy
xy ± 1
coth − 1 x ± coth − 1 y = coth − 1
;
y ±x
(55)
--------------------------------------------------
(
)
(
)
cosh − 1 x + sinh − 1 y = sinh − 1 xy + (x 2 − 1) (y 2 + 1) = cosh − 1 x y 2 + 1 + y x 2 − 1 ,
(
)
(
)
cosh − 1 x − sinh − 1 y = − sinh − 1 xy − (x 2 − 1) (y 2 + 1) = − cosh − 1 x y 2 + 1 − y x 2 − 1 ,
xy ± 1
y ±x
tanh − 1 x ± coth − 1 y = tanh − 1
= coth − 1
;
y ±x
xy ± 1
Identità Euleriane di connessione con le Funzioni Goniometriche Circolari Inverse:
cosh − 1 x = ± i cos − 1 x ,
cosh ix = ± i cos − 1 ix ,
sinh x = − i sin − 1 ix ,
sinh ix = i sin − 1 x ,
tanh x = − i tan − 1 ix ,
tanh ix = i tan − 1 x ,
coth x = i cot − 1 ix ,
coth ix = − i cot − 1 x ,
sech x = ± i sec − 1 x ,
sech ix = ± i sec − 1 ix ,
csch x = i csc − 1 ix ,
csch ix = − i csc − 1 x .
(56)
Rappresentazioni integrali:
⌠
cosh x =
⌡0
x
−1
⌠
sinh x =
⌡0
−1
x
1
t2 −1
1
t2 +1
x
dt ,
1
⌠
tanh − 1 x =
dt
2
⌡0 1 − t
dt ,
1−t
⌠
dt (|x | > 1) .
coth x =
⌡ sgn x 1 + t
x
−1
(|x | < 1) ,
(57)
Un modello strutturale della Goniometria Iperbolica –
31
Altre identità possono essere dedotte combinando opportunamente le relazioni generali nelle Tabelle seguenti per le
rappresentazioni di ciascuna Funzione Iperbolica Inversa mediante qualsiasi altra Funzione Iperbolica Inversa:
f ≡ cosh − 1
f ≡ sinh − 1
cosh − 1 x =
cosh −1 x
± sinh − 1 x 2 − 1
± tanh − 1
sinh − 1 x =
± cosh − 1 x 2 + 1
sinh −1 x
tanh −1
tanh − 1 x =
± cosh − 1
sech − 1 x =
1
1−x
cosh −1
csch − 1 x =
± cosh − 1
coth − 1 x =
± cosh − 1
2
1
x
x2 + 1
x
x
x −1
2
sinh − 1
± sinh − 1
x
x2 − 1
x
x
x2 + 1
tanh − 1 x
1 − x2
1 − x2
x
sinh −1
sinh − 1
f ≡ tanh − 1
± tanh − 1 1 − x 2
tanh −1
1
x
1
x −1
2
1
x +1
2
tanh −1
1
x
Le ambiguità di segno eventuali, ± cosh −1 , implicano, rispettivamente, x ≷ 0 .
f ≡ sech − 1
cosh −1 x =
sech −1
1
x
1
f ≡ csch − 1
± csch − 1
sinh − 1 x =
± sech − 1
tanh − 1 x =
± sech − 1 1 − x 2
csch − 1
sech − 1 x =
sech − 1 x
± csch − 1
csch − 1 x =
± sech − 1
coth − 1 x =
sech − 1
x +1
2
x
x +1
2
x2 − 1
x
f ≡ coth − 1
1
x −1
2
csch −1
1
x
coth − 1
1 − x2
x
x
x −1
2
x2 + 1
x
coth −1
x
1−x
± coth − 1
2
± coth − 1
1
x
1
1− x2
csch − 1 x
coth − 1 x 2 + 1
csch − 1 x 2 − 1
coth − 1 x
Le ambiguità di segno eventuali, ± sech − 1 , implicano, rispettivamente, x ≷ 0 .
■■■
© Copyright 2026 Paperzz