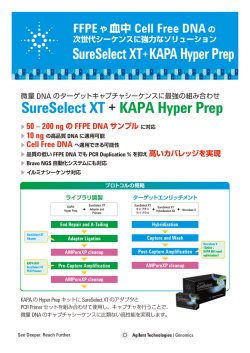
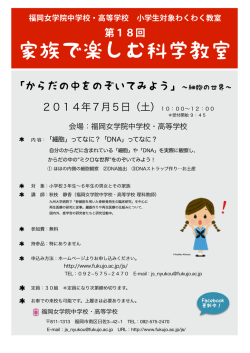
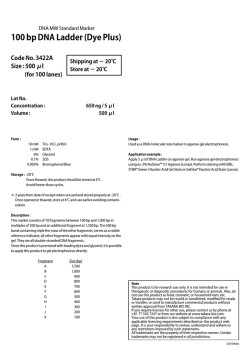
News Letter No. 11 巻頭言 2015 年 3 月 1 日発行 私と分子ロボティクスとの馴れ初め 再生医療を考えようということだと思いますが、私がお引き受け した理由は萩谷先生のご活躍を私の学生時代より存じ上げていた からに他なりません。京大数理解析研究所時代に作られた Kyoto Common Lisp(MIT で作られたやたらと巨大な言語仕様を持つ プログラミング言語 Common Lisp の世界的に最も初期の実装の 一つ)と当時インタフェース誌に連載し、後に単行本化された珠 玉のエッセイ、bit 誌に掲載されたお原稿で、ご本人に直接お会 新学術領域「分子ロボティクス」 医療応用アドバイザー 東京女子医科大学先端生命医科学研究所 大和 雅之 先生 総括班の末席に加えていただいております。女子医大の大和と 申します。再生医療の研究をしております (1)。このたび巻頭言 を書くようにとの御指示がありましたので、私と分子ロボティク スとの馴れ初めらしきものを書かせていただいます。学生時代か ら細胞培養一筋、ついに培養細胞で患者を治す研究に明け暮れて いる私にとって、どんなに分子生物学が進んだと言っても人工的 に細胞一つ作れないとは生物学者としては耳の痛いご指摘です。 元タンパク化学者の端くれの一人としては、莫大な種類と数の分 子が織りなす創発的挙動こそが、独特のしなやかさを見せる生物 の生物たるゆえんであると信じていますが、その証明には、解析 的アプローチ(バラバラにして理解する)ではなく構成的アプロー チ(作って理解する)のみが有効であると考え、再生医療の基礎 をなす組織工学(組織、臓器を作って理解する学問です)に取り 組んでいます (2)。よって、本領域は、本領域と同時に開始した 我が親友北大(当時、現阪大)永井先生の少数性生物学 (3) と並 んで個人的に最も注目する領域であることは事実です。お陰で寒 い冬の日にニセコまで足を運ばせていただきました(両領域の合 同合宿のようなものがありましたがスキーは一切なし。)。 私的なことですが、昨年病気で倒れ、長期入院していたこと もあり、昨年度のイベントには参加できずまことに申し訳あり ませんでした。総括班に加えていただいた理由は出口の一つに Molecular Robotics Research Group. News Letter No.11 いする機会を得られる以前からお書きになったもののファンでし た(これらのうち一部は現在も、萩谷先生のウェブサイトで読む ことができます。(4))。私が大学院の学生だった 90 年頃には、 DNA を使った分子コンピューティングの論文を Science 誌に発 表され (5) ますます熱烈なファンになっていました。当時私が所 属していた研究室のあった東大駒場15号館で偶然お会いし、分 子コンピューティングの研究のお話を伺いました。萩谷先生が構 想中の生体分子を用いたより複雑な分子コンピューティングは、 大腸菌が発現するそれぞれの分子の酵素反応について、k m や Vmax などの酵素反応パラメータをはるかに精密に測定した結果 を持っていないとできませんとお答えすると、うちの研究室でや る気はあるかとお誘いいただきましたが、当時、もっと生物的な 現象に興味があった私はお断りしました。先生は当時、スコット・ キムのインヴァージョン (6) にも御興味をおもちだったと記憶し ています。貴領域のますますのご発展を祈念して筆を置く事とし ます。お互いに頑張りましょう。 脚注 1) 詳細は拙著を参照してください。大和 雅之「おしゃべりな細胞たち 再生医 療入門 すぐそこの未来を話そう」(講談社) 2)「再生医療生物学 ( 現代生物科学入門 第 7 巻 )」 (岩波書店) 3) http://www.paradigm-innovation.jp/ 4) http://nicosia.is.s.u-tokyo.ac.jp /members /hagiya.html#publica tions-japanese 萩谷 昌己「ソフトウェア考現学―基礎概念への最新おもしろガイド (Fine soft series)」CQ 出版社 5) http://www.sciencemag.org/content/288/5469/1223.full?sid=319a0d5f4df1-4197-b353-b4eebfd7532b 6) http://www.anopticalillusion.com/2012/04/the-inversions-of-scott-kim/ 1 新学術領域「分子ロボティクス」公募研究の特集について 新学術領域「分子ロボティクス」では、毎年、班員の相互交流を促進するために合宿形式の領域 会議を開催している。2014 年度は 2015 年 3 月 10 日(火)より 2 泊 3 日の予定で、静岡県ラフォーレ 伊東で開催する。評価者の先生をお招きし、総勢約82 名の領域関係者(班員、ポスドク・学生を含む) が参加する予定である。 2014 年度は第一期公募研究の終了年度に当たり、領域会議も公募研究の成果発表を中心に編成して いる。これをうけ、本号では、公募研究の成果を中心に特集している。公募研究は、研究者の自由な発 想により、計画研究では想定していない研究成果を産み出すことが期待されている。本特集が分子ロボ ティクス研究推進のための一助となれば幸いである。 小長谷 明彦(東京工業大学) 2014 年度領域会議実行責任者 RNA- ペプチド複合体による人工チャネルの進化工学的創製 及び ペプチドアプタマー付加磁性体ゲルの標的分子濃度依存的凝集 根本 直人 埼玉大学大学院理工学研究科 1. リポソーム結合ペプチドの機能解析 cDNA display 法を用いて取得したリポソーム結合ペプチド(LP-1)の機能解析を行い、N 末端 側がリポソームの 2 重脂質膜内部に埋め込まれ、C 末端側がリポソーム表面に露出して存在 することを明らかにした。このことから人工的な進化工学の手法により膜貫通するペプチドの 取得可能性が示唆された。(論文作成中) 2. RNA- ペプチド複合体の進化システムの構築 RNA とペプチドが複合体としてリポソームに結合・貫通するものをスクリーニングする上で、 進化システム自体の効率化が重要となる。そこで、細胞分離用 FACS を用いて、特定のリポソーム を選択的に分離する系を構築した(図1)。現在、これを用いて RNA- ペプチド複合体による リポソーム結合ペプチドのスクリーニングを実施中である。 3. 温度感受性磁性体ゲルとペプチドアプタマーによる凝集現象の発見 磁性体ゲルに標的物質(IL-6R) に結合する 30 残基程度のペプチドアプタマーを固定化すると、 標的物質の濃度により凝集(粒子化)が生じ、外場(磁場)により運動する。化学ポテンシャル が力学変数に変換されうることを示した。(論文作成中) 図1 FACS を用いたリポソームの選択系 リポソームの内液と外液に異なる DNA を混合した後、 回収したリポソームを PCR すると外液にある DNA は References【1】Mochizuki Y, Nishigaki K, Nemoto N. Amino group binding peptide aptamers with double disulphide-bridged loops selected by in vitro selection using cDNA display. Chem Commun (Camb), 非特異的に結合しないこと、リポソームと一緒に回収さ れる外液中の DNA は無視できることが確認された。 50, 42, 5608-5610 (2014) 【2】Nemoto, N, Yoshikawa, Y, Miyajima, Kobayashi, S. Functional Analysis of Liposome Anchoring Peptide Selected by Complementary DNA Display (cDNA Display) Peptides 2014 (accepted). 2 Molecular Robotics Research Group. News Letter No.11 転写ナノチップの構築 : 分子ロボット制御チップ構築に向けて 多田隈 尚史 京都大学・物質 - 細胞統合システム拠点 生物は自律的な遺伝子発現システムで、効率的に機能している。遺伝子発現シ ステムのモジュール化は、分子ロボット構築に有用と考えられる。我々は、DNA ナノ構造の精密分子配置技術を用いて、反応直交性を有するバイオナノチップの 構築を目指している。そこで、DNA ナノ構造をブレッドボードと見立て、DNA から RNA を作る RNA polymerase 酵素 ( 以下 RNAP) と基質遺伝子をナノメー トル精度で分子配置した。その結果、酵素 - 基質間の距離を変える事で、転写活 性を合理設計可能となった。この性質は、従来、経験則的に転写発現量の異なる 遺伝子配列や因子を用いて行われていた遺伝子発現系の構築が、因子間距離とい う比較的制御しやすいパラメーターによって、合理設計可能である事を示してお り、分子ロボットの制御チップ構築に有用であると考えられる。 リポソーム表面で生体分子をセンスする双頭核酸ヘッド型両親媒性分子の開発 庄田 耕一郎 東京大学大学院総合文化研究科 当該分子の合成はアミダイト法を用いて行う。そのためのユニット(右下図) の合成に成功した。図中央の、二つのコレステロール誘導体およびジイン骨格 部分が、脂質二分子膜中に補足され機能する [1]。そのコレステロール誘導体 (コレン酸)は非常に高価(30,000 円 /g)な原料であるため、各反応ステップ ODMTr を徹底的に最適化した。最も収率が低いのは、ユニット前駆体:一方の水酸基 が DMTr 基で保護された化合物である。常法では理論的に 33%が収率の上限で CH3 H3C あった。そこで二つの水酸基を DMTr 基で保護した後、弱酸によって脱保護し、 CH3 また、当該分子を導入するための、オイルフリー巨大一枚膜ベシクル調製法 NH NH CH3 O CH3 CH3 DMTr 基がひとつ脱離したところで反応系内で沈殿化させ回収した。その結果、 このステップの収率は 60%に向上した。 O O H3C N H3C H3C N P O CH3 の開発にも成功した。現在までに、巨大分子複合体であるリボソームを含む無 細胞タンパク質合成系や、さらに巨大な大腸菌の封入も実現した。 Reference【1】P. Barton, et al., Angew. Chem. Int. Ed. 2002, 41, 3878. Molecular Robotics Research Group. News Letter No.11 3 光増感剤を用いた汎用的センサーシステムの開発 寺井 琢也 東京大学大学院薬学系研究科 分子ロボットの創生に当たっては、外界の刺激に応じて何らかの反応 を引き起こすセンサーデバイスを開発し、ロボット表面へと集積させ る必要がある。我々はこれまで、特定の標的分子に応答して光学特性 が変化する蛍光・発光センサーを開発してきたが 1、これらの光セン サーは下流の化学反応との連携には不向きと考えられる。そこで本研 究では、光照射に伴い活性酸素を生成する「光増感剤」に着目し、こ れを用いた新たなセンサーの開発、および分子ロボットの骨格として 想定されるリポソームとの融合を目的として検討を行った。具体的に は、光照射により光増感剤から放出された活性酸素が不飽和脂質を酸 化することでリポソームが破壊され、内部に封入した分子が放出され るシステムの構築(図)を目指した。まず、2I-BODIPY2 および Serhodol3 を母核とする機能性光増感剤の設計・合成を行った。続いて、 光増感剤をリポソームの脂質膜部分に導入するための検討およびリポ ソームの破壊を定量する方法の検討を行った。更に、光増感能の新た 図 : 本研究の概略 な制御手法についても予備的な研究を行った。 Reference【1】T. Terai & T. Nagano, Pflugers Arch. – Eur. J. Physiol., 2013, 465, 347-359. 【2】T. Yogo et al., J. Am. Chem. Soc., 2005, 127, 12162-12163. 【3】Y. Ichikawa et al., Angew. Chem. Int. Ed., 2014, 53, 6772-6775. 光応答性ナノ材料による脂質二重膜構造変換とその医療応用 村上 達也 京都大学物質−細胞統合システム拠点 (WPI-iCeMS) リン脂質二重膜を表面に有する光熱変換ナノ材料(金ナノロッド , AuNR) をリポソーム・生細胞表面に配置し、その後レーザー照射することにより、 AuNR 局所に生じる熱を利用し、リポソーム・生細胞の膜構造を光制御す ることが本研究の目的である。リン脂質二重膜とカチオン性ペプチドを含む ナノ材料(cpHDL)を用いて、AuNR をリン脂質二重膜で被覆する方法を 開発することに成功した [ref 1]。濱田博士(北陸先端大)のラボにて、巨 大リポソームとこの表面修飾 AuNR(cpHDL-AuNR)を混合し、蛍光顕微 鏡観察下レーザー照射したが、両膜間で明確な膜融合は検出されなかった。 その後広範な条件検討を自身のラボで行うため、AuNR に最適の波長を発 振するレーザーを照射下で蛍光観察するシステムを立ち上げた。この結果、 cpHDL-AuNR は生細胞膜に毒性を示すことなく吸着し、短時間のレーザー 照射で細胞膜に一過性のポアを形成することがわかった(図 1) 。またレー ザー強度を下げると、熱感受性イオンチャネルを選択的に活性化できること もわかった [ref 2]。一方で、潜在的に膜融合活性の高い cpHDL の作製を試 み、cpHDL よりも 4 倍程度活性の高い cpHDL 誘導体を見いだした。 図 1:cpHDL-AuNR による生細胞膜の光誘導ポア 形成 蛍光強度は細胞内カルシウム濃度に相当す る。5 秒間レーザー照射すると、一時的にその蛍光 強度が上昇する。 Reference【1】Murakami, T. et al. ACS Nano 2014, 8, 7370–7376. 【2】Murakami, T. et al. in preparation. 4 Molecular Robotics Research Group. News Letter No.11 天然ラージ・リボザイムを用いたシグナル多重増幅・並列処理 RNA デバイスの創成 井川 善也 富山大学大学院理工学研究部 1) リボザイムの分子デバイス素材としての可能性に注目し、少量の入力シグナ ルを増幅して出力する分子デバイス・コンポーネントの構築を、GI リボザイム のモジュール性と自己スプライシング反応を活用して取り組んだ。GI リボザイ ム (Rz) の P5 アクチベータ RNA 配列をエキソンとして利用した基本回路(二 分子スプライシング系 , 図)のデザインと作成を行ない、反応で生成した P5RNA が更なる Rz 活性化を誘起することを実証した。現在、i) 分子ブースター 等による Rz の反応速度とアクチベータのターンオーバー能の最適化(嶋田直彦 班員との共同研究)、ii) 出力モジュールへの連結を検討している。 2) GI Rz とは異なるモジュール型 Rz(VS Rz)を素子としたリボザイム・デ バイス構築を松村茂祥博士(富山大)との共同研究として立ち上げた。VS リボ ザイムにはマイクロ流路による微小液滴技術を利用した高速スクリーングや進 化工学が適用可能であり、GI Rz と同機能のデバイスを、微小液滴技術の活用 で更に高性能化できると期待される。 Reference【1】J. Biosci. Bioeng., 117, 407-412 (2014) 【2】ファルマシア , 51, 42-46 (2015) 数理モデル構築を指向した生化学ネットワーク解析環境の実装 舟橋 啓 慶應義塾大学理工学部 生化学ネットワークの数理モデル構築には「生化学ネットワークの構築」 、 「微分 方程式の記述」の 2 段階の異なる次元でのモデル構築が必要である。既存のソフ トウェア [1,2] は上記 2 段階のタスクをユーザに要求しているが、分野横断型の 研究領域では両者を同等にこなすことができる研究者は限られており、数理モデ ル及びシミュレーションを活用した研究を進めることが困難な場合が多い。 本研究課題では数式処理技術を活用し、数理モデル構築に特化したソフトウェア の開発を行った。具体的には、入力された微分方程式を抽象構文木へと変換し、 各項を自己増殖型、酵素反応型、Mass-Action 型のいずれかに分類することでそ の式が意味する生化学ネットワークを推測し、自動的に構築する機能を実装した。 また、構築されたモデルの数値積分を行う 4 次の陽解法であるルンゲ・クッタ法、 及び 2 次の陰解法である台形法の実装を行った。 入力した微分方程式が持つ生物学的意味およびダイナミクスを即座に確認できる ことで、数理モデルの作成及び理解が容易となることが期待される。 Reference【1】Hoops S. et al., Bioinformatics, 22(24), (2006) 【2】Funahashi A. et al., Proceedings of IEEE Special Issue : Computational Systems Biology, 96(8), (2008) Molecular Robotics Research Group. News Letter No.11 5 仮想物理世界における大規模論理回路の実現 成見 哲 電気通信大学情報理工学研究科 分子ロボットの実現には「センサー」 「モーター」 「コンピュータ」 「構造」など の構成部品それぞれについて今後飛躍的な進歩が必要と思われるが、本研究では 仮に基本的なユニットがあった時のロボットの構築法についての知見を先に得 ることを目標として、仮想物理世界内での大規模論理回路の実現を目標として いる。まず、基本的なユニットとして立方体型の論理回路を提案し、 それらをゲー ムエンジンの Unity を使った仮想世界内で動作させ、コンピュータの基本要素 である論理回路を実現出来ることを示した。また、この立方体型ユニットは物 理的な接触を判定するセンサーやロボットを動かすモーターとしての役割も持 つことから、この一種類でロボットが構成可能である。限定的ながら歩く論理 回路を実現した。ただし、Unity での物理エンジンの動作の様々な制約等で大規 模化は出来ておらず、より単純化したモデルが必要であることが分かった。 図:歩く論理回路 Reference【1】瀬戸口幸寿 , 成見哲 , 仮想物理世界上で動く論理回路の実装 , 2014 年度人工知能学会全国大会(第 28 回), 松山 , 2014/5/14 【2】神澤俊 , 成見哲 , 仮想物理世界で動く大規模論理回路の実現のための立方体型ゲートの提案 , 第 13 回情報科学技術フォーラム (FIT2014), 筑波 , 2014/09/03 分子デバイスで実現可能な確率制御器のモデル化と解析設計手法の確立 東 俊一 京都大学 生体活動を司る制御器の多くが、確率要素を積極的に活用して巧みな制御を実現 している。このような確率制御器は、分子スケールのシステムにおいて自然に現れ、 分子ロボットの実現のために必要不可欠である(右図)。一方で、確率制御器は、 確率の影響を排除することを第一に考えてきた従来の制御工学の発想とは全く異 なるものであり、その解析・設計には、従来の制御理論に立脚しつつ、全く新し い方法が必要とされる。そこで、本研究では、分子ロボットのための確率制御器 の構成論を確立することを目指した。本研究の成果は3つに集約される。第一は、 微生物の走化性を例に、それを司る制御器をモデル化する方法を開発した。第二は、 走化性を司る制御器の性能解析の方法を開発し、性能を理論的に定量化すること に成功した。最後は、化学反応ネットワークの安定性を、ネットワーク構造の情 報だけで解析し、確率的な振る舞いが支配的となるネットワーク構造を明らかに した。以上の成果によって、分子デバイスで実現可能な確率制御器の構成論の基 礎が得られた。 Reference【1】S. Azuma, K. Owaki, N. Shinohara, and T. Sugie: Performance Analysis of Chemotaxis Controllers, 52nd IEEE Conference on Decision and Control, pp. 1411--1416 (2013) 【2】吉田,東,杉江:ブーリアンネットワークのネットワーク構造とダイナミクス多様性,計測自動制御学会論文集,Vol. 51,No. 3, 掲載予定(2014) 6 Molecular Robotics Research Group. News Letter No.11 分子ロボットに適した単純な分散アルゴリズム 大下 福仁 大阪大学大学院情報科学研究科 本研究では、分子ロボットをひとつの分散システムと捉え、その制御に適した分散 アルゴリズムを開発した。とくに、分子ロボットの構成ノードは計算機と比べて低 性能であることから、弱い計算モデルで動作する単純な分散アルゴリズムを開発した。 [1] では、個体群プロトコルモデルにおける緩自己安定リーダ選挙アルゴリズム を提案した(右図)。本モデルは、ランダムに移動するノード群が、衝突時に交流 して状態を変化させる状況をモデル化しており、分子ロボットへの応用が期待でき る。提案アルゴリズムは、ノード群が任意の状況から実行を開始しても、短時間で ただ一つの代表ノード(リーダ)を選択し、それを十分に長い間維持することがで きる。これにより、任意の一時故障(不慮の状態変化など)に対する耐性をもつリー ダ選挙を実現している。 その他の成果として、低性能な自律分散ロボット群 [2]、ネットワークを移動す るモバイルエージェント、仮想グリッドネットワークなどを対象に、効率的な分散 アルゴリズムを開発した。 Reference【1】Y. Sudo, F. Ooshita, H. Kakugawa, and T. Masuzawa, "Loosely-stabilizing leader election on arbitrary graphs in population protocols", Proc. of the 18th Int’l Conf. on Principles of Distributed Systems, pp.339-354, 2014. 【2】F. Ooshita and S. Tixeuil, "On the self-stabilization of mobile oblivious robots in uniform rings", Theoretical Computer Science (to appear). 自律移動ロボット群の分散制御理論に基づく化学反応系の設計に向けて 山内 由紀子 九州大学 本研究では、化学反応系をプログラム可能な粒子群から成る大規模システムと見なし、個々の粒子を制御すること によりシステム全体を制御する、分散制御に基づく化学反応系の制御手法の確立を目指している。特に、2 次元平面 上を自律的に移動するロボット群モデルに着目している。個々のロボットは匿名、無記憶であり、観測 - 計算 - 移動 を 1 つの動作単位として実行する。自律移動ロボット群の分散制御については、既に多数の研究が行われているが、 化学反応系に見られるような粒子どうしの相互作用の局所性、ランダム性に対応するモデルは十分に検討されてこ なかった。 本研究では、ロボットの観測範囲、つまり視界 [1] や制御手法 [2] に局所性やランダム性を取り入れたモデルを 提案し、(i) 有限視界ロボット群の自己組織化能力は無限視界ロボット群に大きく劣り、(ii) 乱択制御手法は決定性 制御手法よりも優れた自己組織化能力を実現できることを解明した。 Reference【1】Yukiko Yamauchi and Masafumi Yamashita, "Randomized Pattern Formation Algorithm for Asynchronous Oblivious Mobile Robots", Proceedings of the 28th International Symposium on Distributed Computing (DISC 2014), pp.137--151, Oct.2014. 【2】Yukiko Yamauchi and Masafumi Yamashita, "Pattern formation by mobile robots with limited visibility'', Proceedings of the 20th International Colloquium on Structural Information and Communication Complexity (SIROCCO 2013), pp.201--212, July 2013. Molecular Robotics Research Group. News Letter No.11 7 瞬速生体分子ロボットのための分子ブースター創製 嶋田 直彦 東京工業大学大学院生命理工学研究科 生体分子機能工学専攻 DNA から構成される分子ロボットは DNA 鎖同士の交換反応(DNA 鎖離間 反応)が素反応となって駆動している。しかし、現在の DNA 鎖置換反応は 遅いために、高速化のためのブースター分子が必要と考えられてきた。我々 は、今までにカチオン性グラフト高分子が DNA 鎖置換反応を数万倍高速化 させる分子として報告してきた。本新学術では更なる高速化を目指し、ブー スターとしての新規カチオン性高分子の創製を目的とした。天然には DNA 二重鎖を不安定することで鎖交換反応を促進させるタンパク質が知られてい る。よって、従来のカチオン性高分子 (PAA-g-Dex) に尿素基を導入した高 分子 PAU-g-Dex を合成し、DNA 鎖置換反応に与える影響を評価した。図 に示すように PAU-g-Dex(53mol% 尿素基導入 ) の添加において 30 分後、 鎖置換後に生じるバンドのみが観察されたことから、置換反応がほぼ完全に 進行したことが示された。以上のことより、尿素基の導入によって鎖交換反 応を更に高速にできることがわかった 1。 Reference【1】N. Shimada, W. Song and A. Maruyama, “DNA strand exchange reaction activated by cationic comb-type copolymers having ureido groups”Biomater. Sci., 2014, 2,1480-1485 記憶制限ランダムエージェントモデルとしての分子ロボットシステム 小野 廣隆 九州大学大学院経済学研究院 確率的・記憶制限的・局所相互作用に基づく分子システムを、グラフ上をランダムに移動する記憶制限のある エージェント群の形でモデル化し、特にその計算能力の解析の観点からアプローチした。この 2 年間で得られた 成果は大きく (1) 分子二重鎖構成モデルの構築とシミュレーション、(2) 群制約下でのエージェント群の遷移問 題の計算複雑度解明、に分類される。 (1) では、提案モデルの代表エネルギー値に基づくロバスト性判定を提案、シミュレーションによりその有効性 を確認した [1]。 (2) では、例えばグラフ構造上での非隣接制約下でのエージェント群の配置遷移可能性判定が一般には現実的な 計算時間でのチェックが難しい(PSPACE 困難) が , グラフが平面性を持つなど望ましい性質を持ち、 かつエージェ ント数が小さい場合、実用的な時間で判定可能(固定パラメータ容易)であること等を示した。 Reference【1】Hirotaka Ono : Robustness Criteria of Hybridization of double-stranded DNA Sequences. XXX EURO mini Conference “ Optimization in the Natural Sciences ”, p.21, 2014. 【2】Takehiro Ito, Marcin Jakub Kaminski, Hirotaka Ono : Fixed-Parameter Tractability of Token Jumping on Planar Graphs.Proceedings of Algorithms and Computation - 25th International Symposium (ISAAC 2014), pp. 208-219, 2014. 8 Molecular Robotics Research Group. News Letter No.11 スウォームネットワークによる非同期情報処理装置の構築 礒川 悌次郎 兵庫県立大学大学院工学研究科電気系工学専攻 分子サイズのロボットシステムを実現するためには、分子規模の要素により構成 された論理演算素子をはじめとする情報処理機構を実現することが必要不可欠で ある。本研究では、多数の同一種有限状態機械がネットワークを構成するスウォー ムネットワークを提案した [1]。このネットワークでは各構成要素がブラウン運 動により駆動されており、接近した機械同士の局所相互作用を定義することによ りブラウン回路と呼ばれる非同期回路 [2] の動作を模擬できることを示した。 図1にブラウン回路素子の一つである CJoin 素子をスウォームネットワークに より構成した例を示す。素子を構成する各エージェントは入出力端子を通して接 続されており、これらの間の相互作用によって素子全体が駆動されている。他の 回路素子である Hub, Ratchet についても同様に設計することができ、これらの 素子を用いることにより、万能チューリング機械と同等の計算能力を持つ機械を 構成できることを示した。 図1. スウォームネットワークによる Conservative Join(CJoin) 素子の構成 Reference【1】M.Mori, T.Isokawa, F.Peper, and N.Matsui, "On Swarm Networks in Brownian Environments," Proceedings of the 2nd International Symposium on Computing and Networking (AFCA'14-CANDAR'14), pp.495-498 (2014). 【2】 J. Lee and F. Peper, “On Brownian cellular automata,” Proceedings of Automata 2008, pp. 278–291, 2008. 生化学反応系の安定性解析および制御系設計に関する研究 中茎 隆 九州工業大学 人工のリポソームで形付けられた構造体の内部に生物的なアクチュ エータやセンサを持つ分子ロボットにおいて,その自律的な運動を 自在に操るための方法論の研究は,制御工学におけるロボットのモー ションコントロールである。センサ情報を元にアクチュエータに対 して,どのような入力信号(波形)を生成すれば,運動の過渡特性 や定常特性を改善できるかを考える問題である。しかし,生体分子 のみで構築される分子ロボットでは,メカトロニクス分野における 常識や前提条件を満たさないことがあるため,分子ロボティクスの ための制御系設計法が必要となる。本研究では,細胞内シグナル伝 達系のシステム構成や動作原理を参考に,次の2点について研究を 行い,その研究成果を学術論文,査読付国際会議論文として報告した。 1. 阻害反応を用いた生物型フィードバック系の安定性を簡便に判定 する方法の提案 2. 特定の分子の濃度を目標レベルに一致させることができる制御系 (レギュレータ) Reference【1】T. Nakakuki: A multifunctional controller realized by biochemical reactions, SICE Journal of Control, Measurement, and System Integration (appear in March 2015). 【2】T. Nakakuki: A study on stability analysis of biochemical reaction system with negative feedback regulation, Proc. of International Conference on Control, Automation, and Systems, October, 2014. Molecular Robotics Research Group. News Letter No.11 9 情報駆動型ミセル-ベシクル転移の探究 豊田 太郎 東京大学大学院総合文化研究科 リポソーム変形を誘発する手法の一つに、界面活性剤による化学刺激がある。これを DNA 反応に置き換える ため、DNA に応答する部位が結合した新規両親媒性分子が必要であり、この両親媒性分子は DNA に応答する とリポソーム膜の曲率を大きく変えることが期待される。そこで私たちは、Joyce らの DNA エンザイム [1] の機能に着目し、その基質となりうるループ構造を有する DNA/RNA キメラを親水部にもつ二本鎖型両親媒性 分子を開発している。この両親媒性分子を含むキャスト膜は、Mg2+ の存在下、室温では水中に安定に存在 するが、ループ構造の Tm 値以上の温度に昇温すると、粒径数十ナノメートルの構造体が 3 次元的に結合した マイクロメートルサイズの分子集合体へ構造変化し、室温に戻してもその分子集合体は変化しないことを見出 した。この両親媒性分子は、水中に溶解していても、室温から Tm 値以上に昇温すると、同様の分子集合体を 形成することがわかった。今後、この分子の反応と分子集合体の構造変化の相関を明らかにしてゆき、DNA エンザイムに応答して変形するリポソームの構築を進める予定である。 Reference【1】[1] R. R. Breaker, G. F. Joyce, Chem. Biol., 1(4):223–229, 1994. 応答性と運動性を兼ね備えた人工細胞ロボットの構築 濱田 勉 北陸先端科学技術大学院大学マテリアルサイエンス研究科 細胞サイズの人工膜リポソームとゲスト分子を集積させた動的な分子ロボット の設計を行った。複合分子から成るシステムを制御するには、膜と部品 ( 分子 ) の相互作用の理解が重要となる。相分離により流動性の異なる領域が共存するリ ポソ-ムを作製し、自己会合性アミロイドβペプチドとの相互作用を解析した。ペ プチドはリポソーム膜面の柔らかい領域(disorder 相) に選択的に局在し、リポソー ムはドメイン領域(order 相)を出芽させる変形ダイナミクスを示した(1) 。こ の出芽ダイナミクスは、細胞の物質輸送であるエンドサイトーシス機能を人工的 に再現したものである。さらに、DNA 分子が高次構造(folding 状態)に依存し て、disorder 相から order 相へと膜への局在を変化させることも明らかとなった (Hamada et al., submitted)。また、膜面の相分離構造を制御するパラメータと して静電相互作用に着目し、相図を構築した(2)。荷電脂質分子や溶液塩濃度に より膜の相分離状態をコントロールすることが可能となった。 Reference【1】"Endo- and Exocytic Budding Transformation of Slow-Diffusing Membrane Domains Induced by Alzheimer’s Amyloid Beta" Morita, et al., Phys. Chem. Chem. Phys., 16, 8773-8777 (2014). 【2】"Charge-induced phase separation in lipid membranes" Himeno, et al., Soft Matter 10, 7959-7967 (2014). 10 Molecular Robotics Research Group. News Letter No.11 DNA 捕捉・放出能力をもつ新規高分子材料等の開発 坂本 隆 北陸先端科学技術大学院大学マテリアルサイエンス研究科 刺激を受け、自律的に考え、行動するロボットを分子のスケールから設計・ システム化しボトムアップ的に構築しようとする「分子ロボティクス」研究 において、個々の分子デバイスをシステムとして組み上げる方法論の構築 は最も重要な研究課題の1つであると考えられる。そこで本研究では、分 子ロボットにおける情報素子としての利用が期待される DNA に着目し、こ れを自在に捕捉・放出できる機能を、ペプチド・脂質・合成高分子などの 機能性分子に付与することを目的とした。DNA の光による捕捉・放出が可 能な分子として、DNA 間での高速光架橋並びに光開裂が報告されている 3-cyanovinylcarbazole(CNVCz)を採用し [1]、これを組み込んだ DNA 結合性ペプチド(GCN4)の合成法を確立した。この光機能性ペプチドを用 いることで、2重鎖 DNA の光による捕捉・放出が可能であることを明らか にした。 Reference【1】Y. Yoshimura et al., Org. Lett., 2008, 10, 3227; K. Fujimoto et al., J. Am. Chem. Soc., 2013, 135, 16161. 分子ロボットの骨格となるナノ構造体の開発と高機能化 池田 将 岐阜大学工学部化学・生命科学科 分子ロボットの骨格として利用可能と期待される繊維状ナノ構造体に 関して、刺激応答性の先鋭化に取り組みました。具体的には、繊維状 ナノ構造体に組み上がる自己集合性分子に化学反応部位を合理的に導 入することで、様々な化学刺激に応答して崩壊する繊維状ナノ構造体 を開発しました。さらに、複数の化学刺激に対する論理応答性の発現 も可能であることを立証しました。また、反対に化学刺激を与えると 繊維状ナノ構造体に組み上がる分子の開発にも、ごく最近、成功しま した。今後、アメーバ型あるいはスライム型ロボットの骨格として利 用することで、人工分子からなる構造体の刺激応答性運動の発現が可 能になると期待されます。 Reference【1】Masato Ikeda, Tatsuya Tanida, Tatsuyuki Yoshii, Kazuya Kurotani, Shoji Onogi, Itaru Hamachi, Nat. Chem., 6 (6), 511–518 (2014). 【2】Tatsuyuki Yoshii, Masato Ikeda, Itaru Hamachi, Angew. Chem., Int. Ed., 53 (28), 7264–7267 (2014). Molecular Robotics Research Group. News Letter No.11 11 細胞骨格及びモータータンパク質によるリポソームの変形と 運動の数値シミュレーション 梅田 民樹 神戸大学大学院海事科学研究科 (1) 内部に封入した微小管やアクチン等の細胞骨格タンパク質からなる繊維 が伸長したときのリポソームの形態変化について、膜弾性と力学的釣り合い を考慮し、有限要素法を用いた3次元形状の数値計算を行い、実験的に観察 されるレモン型やスプーン型等の形態を再現した。次いで、リポソーム型分 子ロボットの開発を展望し、ガラス板等に接着したリポソーム中でタンパク 質繊維が伸長する場合について同様の計算を行い、円盤状のリポソームから 長くのびた形への変形のシミュレーションを行った。実験的研究との比較が 今後の課題である。(2) 負電荷を持つ脂質を含むリポソームを電解液にさら す実験を行い、非常に細い膜チューブが内側に伸びる現象を観察した。静電 効果による膜変形の可能性を確かめるため、膜弾性、膜電荷、溶液中の電解 質の分布を考慮した数値計算を行い、脂質分子の形により、チューブを形成 した方が安定となる場合があることを示した。 Reference【1】T. Umeda, “Numerical studies of protein-induced shape changes of liposomes”, CBI 学会 2013 年大会,東京, 2013 年 10 月 【2】T. Umeda, Y. Tanaka-Takiguchi, K. Takiguchi, “Formation of endocytosis-like membrane tubes in giant liposomes induced by electrostatic effect”, 第 52 回日本生物物理学会年会,札幌,2014 年 9 月 高分子液滴の相分離、濡れ、ゲル化によるミクロゲルの自発的な形態制御 柳澤 実穂 東京農工大学大学院先端物理工学部門 高分子溶液のゾル / ゲル相転移と形態変化を結合させて運動するアメーバ様 分子ロボットの創成に向けて、非球対称形状を備えたミクロゲルを物理的に 生み出す手法を確立することが目的であった。本研究では、ゲル化する高分 子であるゼラチンに、ゲル化せずゼラチンと相分離する分子を混ぜた水溶液 を準備し、それを脂質膜で覆うことで細胞様の高分子液滴を作成した。液滴 は、温度を介した相分離とゲル化の速度、そして脂質膜とゼラチンとの親和 性(濡れ性)に応じて、三日月型や星型、円盤型など、多様な形のミクロゲ ルを自発的に形成することを見出した [1]。この制御法を化学反応により体 積相転移を繰り返すゲル系と組み合わせれば、外部刺激により運動するミク ロゲルの構築が期待される。以上は、鴇田昌之教授・坂上貴洋博士(九大)・ 藤原慶博士(慶應)らとの共同研究であり、また成果は科学雑誌 Newton 2 月号(図) 、日経産業新聞、科学新聞、TBS テレビ番組「未来の起源」など で紹介された。 Reference【1】Yanagisawa et al., PNAS, 111:15894 (2014). 12 Molecular Robotics Research Group. News Letter No.11 アメーバロボット内部に構成部品の非対称分布を作り出す方法の確立 小笠原 慎治 北海道大学創成研究機構 タンパク質発現の可逆的光制御法を使ってアメーバロボット内部にタンパク質 の非対称分布を人工的に作り出しロボットに機能の方向性を与えることが目的 であった。タンパク質発現の可逆的光制御法とは、光照射によって mRNA か らタンパク質への翻訳を開始させたり停止させたりすることができる当研究室 オリジナルの技術である [1] 。アメーバロボットに見立てた細胞を使いレーザー 光でアクチンフィラメントの伸長を促進させるタンパク質 PAK1 を局所的に発 現させ非対称分布を作り出した結果、PAK1 の濃度が高い方へ細胞が移動し運 動に方向性を与えることに成功した。同様のことをアメーバロボットに応用す れば光に応答して自ら機能の方向性を生み出すロボットを作成できると考えら れる。 Reference【1】Shinzi Ogasawara, ChemBioChem 2014, 15, 2652-2655. 分子間相互作用アニメーション構築支援ソフトウェアの開発 上野 豊 産業技術総合研究所 既存の分子アニメーション作成ソフトウェアに関する昨年度までの調査をふま えて、分子間相互作用の検証に重要なソフトウェアツールの機能を明確化し、 プロトタイプ開発を進めた。物理演算機能を有するプログラム構築ライブラリ を利用することで、効率的に開発を進め、反応座標エディタ、およびタイム ラインエディタを実装した。分子モデルの衝突判定等、様々な技術的な問題解 決の報告が国際会議の論文として受理された (Genome Informatics 2014)。 また、タンパク質アニメーションにおいて熱揺らぎを表現する簡易法として、 基準振動解析の結果を利用して軽処理で実現する手法を開発した。普及してい る 3 次元アニメーション作成ソフト blender で利用可能なモーションキャプ チャデータを活用した手法であり、学会発表を経て改良している。分子ロボット の分子モデル構築に適用して研究を支援できるよう開発を継続している。 Reference【1】Y.Ueno, S.Ito & A.Konagaya (2014) Implementing a modeling software for animated protein-complex interactions using a physics simulation library, J.Bioinfo.Comp.Biol, 12(6) pp14420. 【2】村岡 , 上野 , 佐藤 , 小野 , 杉浦 , 金谷 (2014) 基準振動解析を用いた分子アニメーションのための動的分子モデルの開発 第 37 回情報化学討論会. Molecular Robotics Research Group. News Letter No.11 13 BZ 反応場とシンクロする高分子ゲルの力学的性質と ダイナミクスに関する理論 眞山 博幸 旭川医科大学化学教室 本研究では化学振動反応の 1 つである Belousov-Zhabotinsky(BZ)反応 と相互作用する高分子ゲル(BZ ゲル)の力学的性質とダイナミクスを理解 することを目指し、自由エネルギーに基づいた理論的考察を展開した。以下、 要点をまとめる。BZ ゲルの自由エネルギーに化学振動反応を起こす環境と ゲルの相互作用の項を加えて考察することで、BZ ゲルの体積変化によりつ くりだされる仕事および力を理論的に考察することが可能となった。これ により、産総研・原雄介研究員が行った BZ ゲルの実験で得られたデータ を半定量的に説明することに成功した。化学振動反応とカップルして体積 変化を示す微小運動体(スライム、アメーバ)の力学的出力をデザインす ることができる。さらに北大理院・角五彰准教授との共同研究で非平衡条 件下における微小管の挙動の研究を行ってきた。この中で微小管の破壊現 象を考えることで、高分子鎖の力学的性質を定量的に評価する理論的手法 を確立した。微小運動体の力学的強度のデザインに適用することができる。 Reference【1】Y. Hara, H. Mayama, K. Morishima, J. Phys. Chem. B, 118 (9), 2576-2581 (2014). 【2】Arif Kabir et al., Biomacromolecules, 15 (5), 1797-1805 (2014). ソフト&ウェットなロボットを可能にする 3D ゲルプリンターの開発 古川 英光 山形大学ライフ・3D プリンタ創成センター (LPIC) 長 3D ゲルプリンターの開発を進め、細胞足場として利用できるゲルを素材とした 様々な機能性ゲルの 3D 造形を可能にしました。関節を曲げるような屈曲や 200% 以上の伸長にも耐えうる高強度ゲル、摩擦係数 0.001 に達する低摩擦ゲル、60℃ への加熱により造形時の形状に戻る形状記憶ゲルなど、さまざまな機能性を持たせ たゲルの 3D 造形ができるようになりました。右の写真は中空構造をもつ高強度ゲ ルを 3D ゲルプリンターでそのまま造形した様子です。出来上がりの造形精度はま だ 1mm 程度であり更なる改良が必要です。現在、この技術を使ってロボットの 関節や皮膚への適用、眼科手術用インプラントとしての透明眼内レンズの開発を進 3D Printed Gel Cube めています。3D-CAD でデザインした中空の 3D 造形物を誰もが簡単に研究開発 や製造に使えるようになれば、ゲルの物質透過性や生体親和性(食べられるゼリー 食品もできます!)を活用した新しい “分子ものづくり” の強力なプラットフォー ムになると期待しています。 3D Printed Gel Tube Reference【1】“3D ゲルプリンターが先導する化学系メイカーズ革命” , 機能材料 , 34(9), 31-36 (2014) 【2】“3D printing of soft and wet systems benefit from hard-to-soft transition of transparent shape memory gels (presentation video)”, SPIE 9060, doi:10.1117/12.2045265 (2014) 14 Molecular Robotics Research Group. News Letter No.11 生体内シグナルを応用したアメーバ型自律運動制御系の開発 澤井 哲 東京大学 大学院総合文化研究科 自律的かつ動的な脂質シグナルを発振する膜系の確立のため、P I (4,5) P2,PI(3,4,5)P3 のリン酸化反応を触媒する PI3 キナーゼと、PIP3 の脱リン酸 化反応を触媒するフォフアターゼ PTEN とリポソームからなる系の開発をすす めた。PVDF 膜に POPC, PIP2, PIP3 をスポットさせ、PH-domain-RFP の結合 を抗体によって確かめた。また、PC、PS、PIP2、PIP3 からなるリポソームへ の精製 PH-domain の結合を確認した。数種類の PH ドメインの PIP2、PIP3 への選択性をドットブロット分析によって評価し,選択的結合を可能とする PH ドメインの組み合わせと実験条件を確立し、PH ドメインと PI3 キナーゼ 酵素ドメインとの融合タンパクによる、リポソーム上での PIP3 産生を実現し た。さらに、PH ドメインと PTEN の融合タンパクについて、種々のドメイン ATP 添加によるリポソーム上の PIP3 産生にともなった RFP-PHPI3Kc のリポソームへの結合の様子 の精製と反応の分析を進めている。 高分子粗視化シミュレーションによるソフトアクチュエータ 材料の物性とダイナミクス 森田 裕史 産業技術総合研究所ナノシステム研究部門 本研究では、高分子粗視化モデルを用いて自励振動ゲルをモデル化し、 ゲルロボットとしての自励振動ゲルのダイナミクスについて、シミュ レーションの立場から研究を進めている。シミュレーションについて は、自励振動ゲルを用いたゲルロボットモデルのシミュレーションを実 施し、また現実に起こっている反応拡散プロセスをより現実的に取り入 れるために、反応の波形を取り入れてシミュレーションする手法などを 導入したシミュレーションを実施する。結果として、ゲルロボットにつ いては、進行波と同じ方向にゲルが進む様子が示された。また反応の波 形を取り入れてシミュレーションの結果、自励振動ゲルの材料の最適化 が進んでいることがシミュレーション結果として示された。 Fig. ゲルロボットモデルシミュレーションの スナップショット Molecular Robotics Research Group. News Letter No.11 15 TOPICS ● BIOMOD での活躍が「優秀学生顕彰」で表彰されました BIOMOD に参加した学生 2 名が日本学生支援機構から平成 26 年度の優秀学生顕彰で表彰されました。 学術カテゴリ優秀学生 15 名のうち 2 名が分子ロボティクスから選ばれました。 ◆大賞 山下 仁義 東京工業大学 生命理工学部生命科学科分子生命コース 4 年 「分子ロボティクス」 生物と無生物を組み合わせた新規機能を持つ分子ロボットに関する研究。 国内学会発表。BIOMOD2012 国内大会優勝・世界大会で 5 つの賞を同時受賞。細胞を模倣した 細胞サイズの液滴作製に関する研究・発明。特許出願。国際学術誌投稿。 ◆奨励賞 橋田 典子 東北大学 医学部医学科 3 年 「分子ロボティクス」 2012、2013 年 BIOMOD 連続出場。2012 年は薬剤のリポソーム内輸送 システムで総合優勝、2013 年は外的刺激によるリポソーム破壊システムで総合 3 位。チームを代表 し英語プレゼンも担当。 2014 年の主な活動報告 1 月 17 日 1 月定例研究会(産業技術総合研究所) 3 月 14-16 日 第四回領域会議・3 月定例研究会(宮城県モンタナリゾート岩沼) 4 月 12 日 4 月定例研究会(田町 CIC) 4 月 23-25 日 ナノ・マイクロビジネス展 /ROBOTECH(パシフィコ横浜) 5 月 9 日 5 月定例研究会(電気通信大学) 5 月 16-18 日 リポソームブートキャンプ 2014(東京大学駒場) 6 月 9 日 6 月定例研究会(名古屋大学) 9 月 6 日 BIOMOD2014 国内大会(東京大学本郷) 9 月 22-26 日 DNA20 国際会議(京都大学) 9 月 26 日 9 月 27 日 「分子ロボティクス」国際公開シンポジウム(京都大学) 第 52 回日本生物物理学会年次大会共催「分子ロボティクス」シンポジウム企画(札幌) 10 月 28-30 日 CBI 学会 2014 年大会「分子ロボティクス」公開シンポジウム(東京) 11 月 1-2 日 BIOMOD2014 本大会(ハーバード大学) 12 月 8 日 12 月定例研究会(九州大学) 次号 No.12 は 6 月発行予定です Molecular Robotics Research Group. News Letter No. 11 発行:新学術領域 分子ロボティクス 感覚と知能を備えた分子ロボットの創成 事務担当 :村田智(東北大学 [email protected]) 広報担当 :小長谷明彦(東京工業大学 [email protected]) http://www.molecular-robotics.org/ 16 Molecular Robotics Research Group. News Letter No.11
© Copyright 2026 Paperzz