修士学位論文
北海道衛星の姿勢制御系の検討および小型磁気トルカの試作
2005 年 3 月
北海道工業大学大学院
応用電子工学専攻
光電波応用・情報処理工学部門
上島
広史
1
目次
第1章
1-1
1-2
1-2-1
1-2-2
1-2-3
1-2-4
1-2-5
1-2-6
1-3
1-4
第2章
2-1
2-1-1
2-1-2
2-1-3
2-1-4
2-1-5
2-1-6
2-1-7
2-2
2-2-1
2-2-2
2-2-3
2-2-4
2-2-5
2-2-6
2-2-7
2-3
2-3-1
2-3-2
第3章
3-1
3-2
3-3
第4章
4-1
4-2
序論
人工衛星開発史
日本の超小型衛星プロジェクト
まいど 1 号:東大阪宇宙開発協同組合
QTEX:九州大学、九州小型衛星プロジェクト
µLabsat−Ⅰ:宇宙航空研究開発機構
INDEX:宇宙航空研究開発機構
観太くん:千葉工業大学
CubeSat プロジェクト
北海道衛星プロジェクト
本研究の目的
───────────────────────────
衛星ミッションにおける姿勢制御系
姿勢制御方式の分類
スピン制御方式
ゼロモーメンタム方式
バイアスモーメンタム方式
コントロールド・バイアスモーメンタム方式
スラスタ方式
重力傾斜安定方式
地磁気安定方式
姿勢センサ
レートジャイロ
浮動型レート積分ジャイロ
ファイバ・オプティック・ジャイロ
太陽センサ
恒星センサ
地球センサ
地磁気センサ
姿勢制御アクチュエータ
ホイール
磁気トルカ
───────────────────────────
原理
磁気トルカの原理
磁気トルカの制御方法
ヘルムホルツコイルの原理
───────────────────────────
北海道衛星の姿勢制御系
システム構成、仕様
要求精度
2
4
6
6
6
6
7
8
8
9
10
11
12
12
12
12
13
13
13
13
14
14
14
15
15
16
17
17
18
19
19
19
20
20
20
23
26
26
26
4-1-2 姿勢外乱解析
4-1-3 設計要求
4-1-4 姿勢制御系の基本構成
4-1-5 制御に要する磁気トルカの磁気モーメント
4-2
姿勢制御系の制御モード
4-2-1 初期姿勢捕捉モード
4-2-2 地球捕捉モード
4-2-3 定常運用モード
4-2-4 セーフホールドモード
───────────────────────────
第5章 磁気トルカシステムの設計
5-1
磁気トルカシステム
5-2
トルクロッドの見積もり
5-3
PWM 方式による磁気トルカの駆動
5-4
磁気トルカ周辺の磁場の解析
5-5
磁気トルカの取り付けについて
5-6
CubeSat 用磁気トルカの設計
5-7
磁束密度の分布の測定
5-7-1 磁束密度の測定に使用したセンサ
5-7-2 磁気センサを使用した磁束密度のマッピング
───────────────────────────
第6章 結論
26
27
27
28
28
28
29
29
29
謝辞
参考文献
研究業績
付録
47
48
49
50
3
30
30
30
35
37
38
40
43
43
44
46
第1章
序論
1−1 人工衛星開発史
世界で始めて宇宙開発に実現的な可能性を与えたといえるのは、 ツィオルコフスキー
(K.E.Tsiolkovskii,1857-1935,ロシア)である。彼は 1883 年に、真空に近い宇宙を自力で航行
するには、反作用の原理で推進する装置しか無いことを論証した。また 1897 年には、ロケット自身
の重量と推進剤搭載量についての理論であるロケット方程式を発表し、1903 年には液体酸素と液体
水素を推進剤とする液体ロケットと多段式ロケットの理論を発表して、宇宙飛行に関する理論を確立
させた。その後ゴダード(R.H.Goddard,1882-1945,アメリカ)による、ロケット技術の科学から
工学への発展、第 2 次大戦中のフォンブラウン(W. von Braun,1912-1977,ドイツ)による誘導
航行ロケット(V2 ロケット)の開発を経て、次第に衛星を地球外に打ち出せる環境が整えられてい
った。
衛星開発は、第 2 次世界大戦後にアメリカ合衆国、旧ソビエト連邦の軍事的対立を背景として急
速な発達を見せた。世界初の人工衛星は、冷戦さなかの 1957 年 10 月 4 日に旧ソ連が打ち上げに成
功した、「スプートニク 1 号」(図1−1−1)である。当時の旧ソ連は、「鉄のカーテン」と呼ばれ
るように、国内の情報一切を秘密としていたため、スプートニク1号の打ち上げ成功は、旧ソ連の科
学がすでに衛星を製造できる技術水準を持ち、また大気圏離脱能力をもった強力な長距離ミサイルの
開発に成功していることを、大きな衝撃をもって世界に知らしめた。世に言う「スプートニクショッ
ク」である。同年 12 月にはアメリカも「バンガード」の打ち上げを試みるが、打ち上げ直後に起き
た爆発により衛星を失った。翌 1958 年 1 月 31 日には、初の人工衛星となった「エクスプローラ 1
号」(図1−1−2)の打ち上げに成功し、旧ソ連に続いた。スプートニク 1 号は、電離層観測をミ
ッションとした衛星で、姿勢制御を行わなかった。また電力発生のための太陽電池も搭載しておらず、
電力供給はバッテリーに頼っていた。運用期間は、スプートニクが 3 ヶ月、エクスプローラが 4 ヶ
月であった。(図は共に、日本宇宙航空研究開発機構(JAXA)HP 内より)
図1−1−1
スプートニク 1 号
図1−1−2
エクスプローラ 1 号
エクスプローラ 1 号はヴァンアレン帯の発見など、大きな成果を挙げたが、スプートニク 1 号同
様に姿勢制御は行わず、スプートニクよりも小規模なものであった。
その後 1960 年代には世界初の気象観測衛星である「タイロス 1 号」(米、1960 年)、初の商用衛
星「インテルサット 1」(米、1965 年)が打ち上げられ、宇宙空間の利用が本格化した。1970 年代
には日本が「おおすみ」(1970 年)、中国が「東方紅」(1970 年)を打ち上げ、また 1974 年には米
ソともに、初の静止衛星である「SMS1 号」
(気象衛星)・
「モルニヤ 1-S」
(通信衛星)の打ち上げが
成功し、これまで米ソの対立として発展してきた宇宙開発が、ようやくその姿を変え始め、工学的な
4
目的のために世界に広まりだした。日本はおおすみを始めとして、1977 年には早くも「きく 2 号」
「ひまわり」などの静止衛星の開発に成功し、1970 年代を通して 13 機の衛星の打ち上げに成功し
た。
姿勢制御系を始めて搭載したのは、1960 年に打ち上げられた、アメリカの衛星「タイロス 1 号」
(図1−1−3)である。タイロス 1 号では、制御方式としてスピン安定方式が採用された。タイ
ロス 1 号は地球の撮影をミッションとしていながら、現在のスピン観測衛星のようなデスパン機構
を持たなかったため、衛星に取り付けたカメラが地球を向いたときにしか撮影を行えない欠点があっ
た。
図1−1−3
タイロス 1 号(NASA HP 内より)
しかし原始的な機構ながら、わずか 78 日間の運用の間に 22952 枚の雲の映像を地上に送信し、従
来の気球による方法では 10〜20km 程度の高度からしか行えなかった気象観測が 650〜700km の高
度から可能になったことによって、不鮮明な写真ながら衛星からの気象観測が有効であることを世界
に立証し、気象観測研究に大きな成果をもたらした。
日本の人工衛星で初めて姿勢制御系を搭載したのは、1974 年に打ち上げられた「たんせい 2 号」
(図1−1−4)である。たんせい 2 号は基本的には、タイロス 1 号と同様なスピン安定制御を行
うが、地磁気と作用させることによってスピン軸を偏向させる、スピン軸方向制御装置の搭載が特徴
である。そのほかにも姿勢保持用の小型電磁石を搭載していた。たんせいシリーズは、3 号機では沿
磁力線姿勢安定化方式やコールドガスジェットによるスピン軸制御実験、4 号機では磁気力によるス
ピン軸太陽オフセット指向自動制御やフライホイールによる姿勢制御試験など、将来の衛星制御方式
の開発のための実験を行った。
図1−1−4
たんせい2号(JAXA HP 内より)
5
1−2 日本の小型衛星プロジェクト
現在日本では、各地の様々な機関で小型衛星開発プロジェクトが進められている。目的・規模は様々
であるが、いずれも国家主導で推進されてきた宇宙開発事業の新たな局面を表しているといえる。
1−2−1 まいど 1 号:東大阪宇宙開発協同組合
「まいど 1 号」は、「歯ブラシからロケットまで」をモットーとする工業地域である、東大阪地区
の企業により進められているプロジェクトである。プロジェクトの中心人物である、青木豊彦氏((株)
アオキ代表取締役)を中心として、東大阪宇宙開発協同組合(SOHLA)が結成され、宇宙航空研究
開発機構(JAXA)の技術的な指導の下、衛星の開発に取り組んでいる。しかし技術実証的な目的で
はなく、ものづくりとして始まった感が強い。
まいど 1 号は、大阪府大との共同研究による雷観測センサ、また、今後の発展型モデルのための
衛星の基幹部分(バス機器)の実証をミッションとしている。打ち上げは、2005 年から 2006 年初
頭を目指している。また、まいど 1 号は、JAXA の µLabsat を基本とした技術移転により造られた。
図1−2−1
まいど 1 号(ABC 放送 「NEWS ゆう」より)
1−2−2 QTEX:九州大学、九州小型衛星プロジェクト
九州地区では、九州大学を中心として近隣地域の企業が参加し、「地域型宇宙開発の実現」を目標
に、産学官の連携組織である QPS(Q-shu Piggyback Satellite)を組織し、活動している。プロジ
ェクトのロードマップは、2003 年から 2006 年にかけては、学生を主力として九州大学がQTEX-PR、
QTEX を製造し、QPS は技術習得、製造支援を行う。2007 年度以降は、QPS として、QPS 衛星(図
1−2−2)の開発に取り掛かる。QTEX-PR は 2005 年 3 月での完成を目指しており、完成後はプ
ロジェクトの PR 活動に積極利用していく。また、2006 年 3 月までには QTEX を完成させる計画で
ある。これらは、機会に恵まれれば、打ち上げも検討されている。
QPS プロジェクトでは、テザー進展機構の実証をミッションとしている。テザー進展機構とは、
無重量空間中で宇宙機を連結する高張力綱の制御機構である。この機構はミッションの要であると同
時に、現時点で実用化された技術はなく、過去に米国のスペースシャトルを母船としたテザー実験が
失敗したように、実現には究めて高度な技術を要する。
テザー技術の発展として、軌道エレベータなどの技術が考えられている。その他にも、故障機体の
回収、推進器を必要としない軌道変換、小型衛星のフォーメーションフライト(編隊飛行)による高
度なミッションの展開など、様々な応用が考えられている。
6
図1−2−2
テザー進展中の QPS(九州小型衛星プロジェクト HP 内より)
1−2−3 µLabsat−Ⅰ:宇宙航空研究開発機構
µLabsat(マイクロラブサット,図1−2−3)は、宇宙開発事業団(NASDA)技術研究本部の、
先端ミッション研究センター(現 JAXA 総合技術研究本部)が開発した小型人工衛星である。一般の
衛星は放射線などに耐える部品を使うが、高信頼性であるために高価である。1 号機は全て民生用部
品で作られており、 設計から組み立てまで、全て若手職員による手作りである。
また民生部品を活用して試作されているため、その耐久性も実験の対象となった。 大きさは 50cm
立方程度で八角柱形状、 重さは約 54kg である。開発費は約 4 億円と、 通常の衛星と大差ないが、
これは初の試みということで市販品を大量に購入して厳密な試験を行なったためである。 ちなみに
衛星用バッテリーは特注で 100 万円以上するのが通常だが、この衛星では 1 個 600 円の市販のバッ
テリーが 24 個使われている。
2002 (平成 14)年 12 月 14 日に H-IIA ロケット 4 号機(H-IIA・F4)により打ち上げられた。
図 1−2−3
µLabsat1 号機(「GUNTER'S SPACE PAGE」HP 内より)
7
1−2−4 INDEX:宇宙航空研究開発機構
INDEX(インデックス)は、大きさ 60×60×70cm、重量は約 60kg の小型高機能衛星である。こ
の 限 られた リ ソ ー ス の 中で 、 ス タ ー ト ラ ッ カ (STT ) や スピン / ノ ン ス ピ ン 型 太 陽セ ン サ
(SSAS/NSAS)、地磁気センサ(GAS)、3軸の光ファイバジャイロ(FOG)といった各種センサ、
およびアクチュエータとしてリアクションホイール(RW)と磁気トルカ(MTQ)を搭載している。
次世代の先進的な衛星技術の軌道上での実証や、小規模、高頻度の科学観測ミッションの実現、イン
ハウス技術の蓄積、若手技術者、科学者の育成などを目的としている。
具体的なミッション内容としては、次世代技術の開発として、高速 CPU による衛星の統合化制御
やリチウムイオン電池、反射板付高効率太陽パドルの搭載実験などを行う。また、科学観測ミッショ
ンとしてオーロラカメラと粒子センサによるオーロラの微細構造の観測ミッションを行う。 オーロ
ラの微細構造の撮像を行う理学ミッションの要求から、撮像に適する 3 軸姿勢安定方式を採用して
いる。RW はミッション要求と搭載スペースを勘案して 1 軸分のみを搭載し、バイアスモーメンタム
方式の 3 軸姿勢制御を行う。姿勢制御精度は 0.5 度、姿勢決定精度 0.05 度が目標である。
図1−2−4
INDEX(JAXA HP 内より)
1−2−5 観太くん:千葉工業大学
「観太くん」は、謎に包まれた鯨の生態を解明しようと、千葉工業大の林友直教授が、学生らと
開発した鯨生態観測衛星である。衛星は一辺 50cm の立方体、重量は 50kg の小型衛星で、周りのパ
ネルに貼った太陽電池で発電する。鯨の回遊周期の1〜2年は観測を続ける。通常はこのクラスの小
型衛星の製作には、約 30 億円程度が必要であるが、民生部品などを利用することで、わずか 8000
万円程度で製作した。
鯨に取り付けられた GPS の受信機や電波送信機を収めたプローブと呼ばれる発信機からの信号を
衛星で受信し、解析することによって、鯨の回遊経路と生態の詳細を分析する。重力傾斜安定を利用
し、3 メートルのマストを伸ばすことにより、観測用のアンテナが地表を向くように姿勢制御する。
高度 800km の極軌道を航行するため、地球の自転に伴い地球全表面を走査することができる
8
図 1−2−5
鯨生態観測衛星の衛星軌道(千葉工業大学 HP 内より)
1−2−6 CubeSat プロジェクト:大学・高専宇宙工学コンソーシアム
CubeSat (キューブサット)とは、1999 年の USSS(University Space Systems Symposium)
において米スタンフォード大学の Twiggs 教授から提案されたプロジェクトの名称であり、"S3 Student Space Study"として日米の大学間で合意されたプロジェクトの内容は、重量 1kg 以下で、
一辺が 10cm の立方体内に入る超小型衛星を、低軌道に打ち上げようというものである。
日本では、東京大学、東京工業大学が 2003 年に開発・軌道投入に成功している。現在も運用を続
けており、現在東大・東工大では 2 号機を製作している。またその他にも創価大学、九州大学、北
海道工業大学などが開発を進めており、2005 年度中には、日本大学が打ち上げを予定している。ま
た、CubeSat プロジェクトは、UNISEC(University Space Engineering Consortium:大学・高専
宇宙工学コンソーシアム、ユニセック)の参加大学を中心に進められている。
図1−2−6
CubeSat(図内右の立方体,東京大学 CubeSat プロジェクト HP 内より)
9
1−3 北海道衛星プロジェクト
タイロス 1 号によって、人工衛星からの地球観測(リモートセンシング)の有用性が認められた。
現代ではあらゆる分野での活動において、リモートセンシングは必須ともいえる技術である。気象観
測のみならず、鉱物などの資源探査、植生等を知るために用いられ、近年の分解能の向上などの高精
度化も手伝い、大きな成果を挙げている。日本に於いては、1976 年に打ち上げられた電離層観測衛
星「うめ」が、もっとも早い時期のリモートセンシング衛星である。
現在北海道において、北海道工業大学を中心として、北海道衛星プロジェクトが進められている。
開発中の北海道衛星1号機「大樹(たいき)
」
(図1−3−1)は、水稲の作柄、牧草の生育状況など、
農業分野でのリモートセンシングを主たる目的とした衛星であり、国内での開発は初の例となる「ハ
イパースペクトルカメラ」を搭載している。ハイパースペクトルカメラは 1 度の撮影あたり、400〜
900nm の波長域に於いて同時に 72 バンドのスペクトル情報を含む画像を得ることができる特殊光
学センサである。これによって、GIS(Geographic Information System:地理情報システム)等へ
の発展の可能性を秘めている。
従来の小型衛星プロジェクトとの比較における、北海道衛星プロジェクトの特色は、その開発体制、
思想にあると言ってよい。これまでの小型衛星開発は、宇宙航空研究開発機構などの支援を受け、基
礎設計、ミッションのアイデアこそ各団体・各地方によるものであったが、その後の実際の製造・評
価は全て関東圏で行われていた。このことは、製造業における生産・技術の一極集中、ひいては地方
産業の弱体化を招いていた。
北海道衛星プロジェクトでは、開発・設計・製造を全て北海道で行うことで、北海道に宇宙産業を
創出することを目的としており、北海道から世界に通用する技術を生み出すこと、また得られた技術
成果によるスピンオフ事業の展開、それらによる経済波及効果を見込んでいる。例として、現在北海
道が進めている IT 推進と北海道衛星プロジェクトの関わりを考えた場合、電子部品の塊である衛星
の開発は、その応用分野として最適であると言うことができる。
また衛星は電子部品の塊であると同時に、ソフトウェアが重要な位置を占める。その点では、札幌
にはハドソンに代表されるようなソフトメーカーが多数あり、「札幌バレー」と呼ばれ全国でも屈指
の技術力を有している。
現在開発中の北海道衛星 1 号機「大樹」は、先に述べたように農業分野での利用を計画している
が、それは北海道の基幹産業である農林業について、消費者に急速に高まりつつある安全意識・ブラ
ンド志向に対応するために、リモートセンシング技術を応用した高度な生産管理を行うことで、たと
えば「北海道」をブランドとして認知させるためである。それによって農業ビジネスの活性化などを
急速に推し進めることができる。
現時点でも、人工衛星による生産管理は行われているが、いわば中間業者を通じ「衛星の機能を借
りる」という状況であり、データ取得から提供までにはタイムラグがある。そのため、作柄を示す情
報が提供されたとしても、情報は新鮮度が低く、最適な収穫時機を逸してしまう。また提供される情
報が有用なデータとは限らないが、高額な利用料が必要となっている。しかし農業リモートセンシン
グに特化し、生産から運用までの管理一切を、北海道を拠点として行う北海道衛星によって、このよ
うな現状にブレイクスルーをもたらすことができる。
北海道衛星の利用は決して北海道のみならず、日本全国、またアジアをターゲットとしている。北
海道衛星はバス部分を規格化し、ミッションはユーザーの要望によって決定される、「1衛星・1ミ
ッション」を基本方針としている。バス部分の規格化、また利用目的の絞込みによって、これまでに
ない開発の低コスト化と、納期の短縮を見込むことができる。
10
表1−3−1
軌道高度[km]
軌道傾斜角[deg]
軌道周期[sec]
北海道を通過する回数[/day]
寸法(W×L×H)[m]
重量(含ミッション機器)[kg]
総消費電力[W]
地上へのデータ送信
ミッション機器
運用寿命
北海道衛星の概要
566.89
97.65
5760
1
0.5×0.5×0.6
50
50
100Mbps レーザ通信
ハイパースペクトルカメラ
3年
図1−3−1
北海道衛星
リモートセンシングをミッションとする為、北海道衛星では高精度な姿勢制御が必要とされる。北
海道衛星の姿勢制御系(Attitude Determination and Control System:ADCS )は、制御方式とし
て 3 軸制御バイアスモーメンタム方式を採用しており、モーメンタムホイールおよび磁気トルカを
中心として制御を行う。バイアスモーメンタム方式の採用によって、受動的な姿勢安定が維持でき、
制御系故障時のロバスト性(可制御性)が実現できる。ここで、北海道衛星の姿勢制御系はそれぞれ
2 重冗長構成とするが、運用にあたり、2 重故障はないものとする。
1−4 本研究の目的
すでに述べたように、北海道衛星はリモートセンシングを目的とした小型衛星であり、ミッション
のためには、姿勢制御系による姿勢維持が必要である。そのため本研究では、姿勢制御アクチュエー
タの一種である、磁気トルカについて、小型衛星搭載用磁気トルカシステムの設計手法を開発するこ
とを目的とする。
北海道衛星プロジェクトでは、北海道衛星本機の打ち上げに先駆け、姿勢制御系などの軌道実証の
ために、CubeSat を打ち上げる予定である。
そのため、北海道衛星用磁気トルカの設計手法を基に、CubeSat 用小型磁気トルカの設計・試作・
性能評価を行う。
また、磁気トルカによる磁場を測定するための、磁気センサの設計、試作を行う。
11
第2章
衛星ミッションにおける姿勢制御系
本章は、第 1 章「序論」に対する補足を兼ねた内容であり、本稿を読まれるにあたり、最低限必
要と思われる内容を記述した。なお、本章で使用される図のうち、特に断りの無いもの、PSD の原
理以外の図については、
「NASDA 技術ハンドブック 1016 人工衛星姿勢制御系コンポーネント解説
書」より引用した。
2−1 姿勢制御方式の分類
スピン制御方式のタイロス 1 号が登場し、その後のミッションの高度化に伴い、人工衛星にとっ
て姿勢制御系は不可欠なコンポーネントとなっていった。現在の人工衛星の姿勢制御方法には様々在
り、本節では各方式についてその特徴を述べる。地球付近の人工衛星では、大別して二つの制御方式
があり、何らかのアクチュエータを使用して姿勢を制御する能動制御と、宇宙機に働く自然トルクを
利用し姿勢の安定を図る受動制御である。また能動制御には、スピン衛星のような 1 軸制御方式と、
複数の軸を制御する方式がある。
多軸制御を行う場合、機体の姿勢変化を現すための宇宙機を中心とした基準座標系および機体座標
系の定義が必要となる。
基準座標系は、衛星の現在位置を原点にとり、一般に軌道面内での衛星の速度ベクトルの方向のX
軸、地球中心方向にZ軸、それらと直交する軌道面の法線方向にY軸を定義する。
機体座標系は、機体の進行方向をxB 、地球中心を向く面の法線方向にzB 、太陽電池パドルの回
転軸方向をヨー軸と定義する(図2−1−1)。またxB 軸をロール軸、yB 軸をピッチ軸、zB 軸を
ヨー軸とも呼び、姿勢に乱れの無い定常状態では機体座標系と基準座標系は一致している。
図2−1−1
基準座標系を機体座標系(茂原正道,「宇宙工学入門」より)
2−1−1 スピン制御方式
人工衛星の姿勢制御において、最も早い段階から実用化されていた方式で、物体の回転によって生
じる角運動量によって、慣性空間に対する衛星の姿勢を保つことができる。原動機として衛星を回転
させることができるアクチュエータのみであるため、単純な機構であり高い信頼性を持たせることが
できるが、慣性主軸の揺動によって姿勢を保つことができなくなるため、重量物を衛星の重心付近に
配置しなければならず、衛星設計時に部品レイアウトの自由度を大きく制限されてしまう。
2−1−2 ゼロモーメンタム方式
ゼロモーメンタム方式は、衛星の機体軸(ロール、ピッチ、ヨー)に沿って、3 個の独立なリアク
ションホイール(後述)を設け、外乱に対してホイールの回転数を制御することで、その回転の反作
用によって外乱を吸収し、衛星の姿勢を制御する。
12
ここで、ロール、ピッチ、ヨーの各軸の定義は、機体の進行方向にロール、軌道面に対して垂直に
ピッチ、機体から地心方向に向かってヨーであり、3 つの軸は互いに垂直である。
2−1−3 バイアスモーメンタム方式
バイアスモーメンタム方式は、基本構成はゼロモーメンタム方式と類似のシステムであるが、ホイ
ールを低速ながら常に回転させ、宇宙機に慣性モーメントを持たせる方式である。慣性モーメントに
よって、衛星は慣性空間に対して安定した姿勢を維持することができ、また外乱が加わる際には、ジ
ャイロのように復元力を働かせることができる。しかし、ホイールの回転によって常に電力を消費し
てしまうため、発生電力量の小さい衛星では、電力収支を保つことが難しい。
2−1−4 コントロールド・バイアスモーメンタム方式
コントロールド・バイアスモーメンタム方式は、スピン制御とホイール制御を併用する方式である。
この方式では、通常はモーメンタムホイール回転軸に一致したスピン制御を行い、ミッション時には
モーメンタムホイールによってスピンの角運動量を吸収させ、最終的には、モーメンタムホイールと
リアクションホイールによる3軸制御を行う。コントロールド・バイアスモーメンタム方式衛星の構
成例を図2−1−2に示す。図中の Z B が衛星の回転軸、側面の WHL-R がリアクションホイール、
底部の WHL-M がモーメンタムホイールである。
図2−1−2
コントロールド・バイアスモーメンタム方式の例(JAXA HP 内より)
2−1−5 スラスタ方式
スラスタ方式は、高圧気体噴射の反作用によって、衛星のデスピンなどの制御を行う。大きな推力
を得ることができるが、使用回数を制限される。また使用される推進剤による、衛星周辺の空間の汚
染(コンタミネーション)が避けられない。
2−1−6 重力傾斜安定方式
重力傾斜安定方式は、姿勢安定のために特別なアクチュエータを必要としない方式であり、衛星の
重量分布の偏りを積極的に利用する方法である。ロール軸回りには重力と遠心力による復元トルクが、
ピッチ軸回りには重力による復元トルクが、ヨー軸回りには遠心力による復元トルクが作用し、適切
な方法をとれば、衛星の 3 軸姿勢安定が実現できる。また重力傾斜安定方式では、重量物が衛星の
両端に寄るほど、その効果が顕著になる。そのため球状、立方体形状よりもロッド状の衛星形状のほ
うが有利であるが、伸展機構を使用することで任意の形状の衛星で使用できる。
13
2−1−7 地磁気姿勢制御方式
地磁気姿勢制御方式は、衛星が地磁場中を飛行していることに注目し、衛星内に磁気モーメントを
発生させる制御ダイポール(磁気トルカ)を設け、地磁場と磁気モーメントとの相互作用によって発
生するトルクによって制御を行う。特に高度数 100〜数 1000km の低軌道では、重力傾斜トルク、
太陽輻射圧トルク、大気抵抗トルクなどの外乱トルクより充分大きくできる。
2−2 姿勢センサ[1]
姿勢制御系は一般的に、姿勢検出用センサ、姿勢変更・維持用アクチュエータおよび、演算用プロ
セッサ(コントローラ)より成る。これらはフィードバック系をなしている。図2−2−1にホイー
ルによる制御系の例を示す。
図2−2−1
姿勢制御系ブロック図
センサの種類等、概要を下図に示す。
図2−2−2
センサの概要
2−2−1 レートジャイロ
レートジャイロ(Rate Gyro:RG)は、ジャイロを用いた姿勢センサのうち、最も単純なもので、
入力された角速度(レート)によって生じるトルクをトーションバーと呼ばれるスプリングで受け、
入力角速度に比例した電気信号を発生させ角速度検出を行うセンサである(図2−2−3)。
レートジャイロは自律型のセンサであり、他の補助手段ならびに相対的基準を用いることなく、直
接に人工衛星等の運動体の角速度を検出できる。そのため、ジャイロを搭載した姿勢検出ユニットを
総じて、IRU(Inertial Reference Unit:慣性基準装置)と呼ぶ。
14
図2−2−3
レートジャイロ原理図
2−2−2 浮動型レート積分ジャイロ
浮動型レート積分ジャイロ(Floated Rate Integrating Gyro:FRIG)は、レートジャイロに使用
されているスプリングを粘性抵抗液に置き換えたものである。ジャイロ部分を液中に浮かせることで、
軸受け部分での摩擦トルクを低減させている。入力軸周りに角速度が与えられると、レートジャイロ
同様に出力軸周りにトルク T を生じるが、トルク T は液体の粘性抵抗によって角速度に比例したト
ルクに変換され、構造理論的角度によって角速度を検出することができる。このジャイロは、外部に
リバランス回路を設けることで、高精度レートジャイロとして使用できる。図2−2−4に原理図を
示す。
図2−2−4 浮動型レート積分ジャイロ等価原理図
2−2−3 ファイバ・オプティック・ジャイロ
ファイバ・オプティック・ジャイロ(Fiber Optic Gyro:FOG)は、ファイバループ内を独立に伝
搬する右回り光と左回り光の存在する系に角速度が加えられた場合に、その角速度を左右伝搬光に生
じる位相差に起因する干渉によって検出する。このジャイロは原理的に稼動部分が全くないため、ジ
ャイロの作動に伴う微小振動が一切なく、衛星の姿勢制御系に適したセンサとして注目されている。
FOG は 1976 年にその原理が発表され、1990 年代から航空、産業機器の分野で利用され、現在では
カーナビゲーション等の身近なものにも搭載されている。
15
2−2−4 太陽センサ
太陽センサは、太陽の方向を検出することで、衛星の姿勢角を求めるセンサである。太陽センサに
は、デジタル方式とアナログ方式があり、それぞれ精太陽センサ、粗太陽センサと呼ぶ。一般的には
デジタル方式の方が高精度だが、デジタル粗太陽センサもあるため、厳密にはアナログ、デジタルと
いった方式の違いで精度を判断できない。
a) 精太陽センサ(Fine Sun Sensor Assembly:FSSA)
様々な方式が存在するため、ここではコードパターン方式について説明する。コードパターン
方式では、スリットを通過した線状の光は、グレイコードパターンにデザインされたパネルに投
影される(図2−2−5)。このパネルによって 0 1 の信号が生成され、フォトセルによっ
て検出することで太陽光の入射角、すなわち衛星の角度を検出できる。この方式では、各桁での
グレイコードを読み取るだけでよいため、信号処理は簡単であるが、視野拡大、精度向上のため
には桁数が増加してしまう。
図2−2−5
コードパターン方式動作原理
16
b) 粗太陽センサ(Coarse Sun Sensor Assembly:CSSA)
粗太陽センサとして、北海道衛星に搭載予定である PSD(Position Sensitive Detector)方式につ
いて説明する。スリットを通過した光を光電素子に当てることで、光電効果による電流 I0 が発生す
る。電流 I0 は P 層(抵抗層)を通り、それぞれセンサの両端にある電極までの距離に応じて分割さ
れ、Ia、Ib として取り出される。センサの長さ L が既知であるので、電流との関係から、受光面上で
の入射光の位置を知ることができ、またそれによって入射角度、すなわち衛星の太陽に対する姿勢角
を知ることができる。原理を図2−2−6に示す。
全長 L
入射光
入射位置までの距離 X
Ia
Ib
P 層(抵抗層)
I層
N層
共通電極
図2−2−6
PSD の原理
また、受光面への入射位置は、次の関係から求められる。
L− X
⋅ Io
L
X
Ib = ⋅ Io
L
Ia L − X
=
Ib
X
Ia =
(2−2−1)
(2−2−2)
(2−2−3)
2−2−5 恒星センサ
恒星センサ(Star Tracker:STT)は、宇宙空間から複数の星像を検出し、内蔵された恒星カタロ
グとの比較、照合を行うことで、その結果を基に慣性座標系に対する、センサの座標系の姿勢を決定
する。STT は主に、高精度な天文観測ミッションに用いられてきたが、地球観測の高精度化に伴い、
地球観測衛星にも広く用いられるようになってきている。ただし、得られた星像のセントロイド演算
(中心位置算出処理)を行うことができる比較的高速なプロセッサ、恒星カタログ、演算のためのメ
モリが必要であり、また、他のセンサに比べて、サイズ、消費電力、重量などが大きく、高価である
ため、搭載できるミッションは限られる。
2−2−6 地球センサ
地球センサ(Earth Sensor:ES)はボロメータ、焦電型素子などの赤外検出素子によって、地球
と宇宙空間の赤外領域における輻射強度の違いから地球の存在、また地球中心方向の検出によって衛
星の姿勢角をもとめるセンサである。低軌道周回衛星、静止衛星で広く使用されており、地平線スキ
ャン方式、地平線トラッカ方式、静的熱平衡方式の 3 方式がある。いずれの方式も昼夜を徹して輻
射強度が安定している 14〜16.3μm 帯を検出波長帯として使用するのが一般的である。これは高度
約 40km に存在する CO2 帯からの黒体輻射である。
一般的に使用されるスキャン方式では、スキャンミラーが地球ディスク(センサ視野内にある地球
は、二次元体として捉えられる)を横切る際のパルスの立ち上がり、立下りの間隔、基準パルスから
17
の経過時間などからロール軸周り、ピッチ軸周りの姿勢の検出を行う。図2−2−7にスキャンによ
る地平線検出を示す。
図2−2−7
地平線スキャナの軌跡
またセンサ視野に入り込む太陽、月によって誤ったパルスが出力される(図2−2−8)が、それ
らは地球に比べて視半径が小さく、LE 信号(Leading Edge:宇宙区間−天体)、TE 信号(Trailing
Edge:天体−宇宙空間)の間隔が狭いため、地球との選別が可能である。
図2−2−8
地球センサへの地球以外の光源による干渉の除去
2−2−7 地磁気センサ
磁気センサ(Geomagnetic Aspect meter and sun Sensor:GAS)は、地球磁場の方向と大きさか
ら、衛星の地球に対する姿勢、スピン位相検出を行うセンサである。最近では衛星に搭載される OBC
(On Board Computer)の性能向上によって、姿勢検出を数学モデルによって代用できるが、地磁
場モデルの不確定性、残留磁気による誤差、高度 1000km 以上では磁場が微弱なため有効に検出で
きないなど、精度や使用法に制限がある。
姿勢センサ用としては、磁性体の B‐H 飽和特性を利用したフラックスゲートタイプが一般的で
ある。しかしフラックスゲートタイプは若干大型であり、また消費電力が大きいため、小型衛星への
搭載には適さない。
18
2−3 姿勢制御アクチュエータ[1]
姿勢制御アクチュエータは、図2−3−1のように分類されている。
図2−3−1
アクチュエータ概要
2−3−1 ホイール
ホイールは、ロータ(ディスク状の重量物)をモータにより加速・減速させ、その回転数を制御す
ることで、角運動量によるジャイロ安定効果、外乱トルクの吸収などの機能を発揮する装置である。
一般的には、バイアス角運動量を持たせずに、正転・逆転両方向で回転させ、衛星に与える反作用
トルクを使用するものをリアクションホイール(Reaction Wheel:RW)、ロータを高速回転させる
こ と で バイアス 角 運 動 量 を持 た せ、 正 転 方 向の み で使 用 す る も の を モ ー メ ン タ ム ホ イ ー ル
(Momentum Wheel:MW)と呼んでいる。しかし、近年では場合により、ハイブリッドな使用を
行うことがあり、両者の区別は曖昧であるが、基本的な役割としての RW、MW という区別は残さ
れている。
重量物を高速で回転させるため、質量の偏り、偏心、軸受け部の摩擦など、衛星に内乱となる振動
を与えてしまう恐れがあり、高い加工精度が要求される部分である。
2−3−2 磁気トルカ
磁気トルカは、コイルに電流を流して磁気モーメントを発生させ、地球磁場との作用で発生するト
ルクを利用して制御を行う装置である。地球磁場を利用するため、低高度を周回する衛星ほど、効果
が大きい。瞬時発生トルクが小さいため、主にホイールのアンローディングや、外乱補償に使用され
る。そのため、軌道一周回での総和から、どの程度の角運動量を得られるかを検討し、磁気トルカの
サイジングを行う。サイジングは、軌道要素、ミッション要求にも左右される。
磁気を発生する機器であるため、磁気に対して影響を受けやすい、また影響を与えやすい機器との
干渉によって制御力の低下を招く恐れがある。磁気トルカ同士での干渉についても、想定している磁
束密度、磁力線方向が得られなくなるため、配置には慎重な検討を要する。
磁気トルカについては、次章にて詳説する。
19
第3章
原理
3−1 磁気トルカの原理[1]
磁気トルカは、衛星内に設けられた制御ダイポール(有芯ソレノイド)と、地球磁場の間に生じる
トルクによって、衛星の姿勢制御、またスピン軸偏向を行うアクチュエータである。
図3−1−1
磁気トルカ(MICROCOSM 社 HP 内より)
制御ダイポールが発する磁気モーメント Mm[Am2]を地磁気 B[T]の中に置くと、両者の相互作用に
より、以下のトルクが発生する。
T = M m × B [Nm]
(3−1−1)
高度数 100〜数 1000km の低軌道では、地磁気トルクは重力傾斜トルク、太陽輻射圧トルク、空
気抵抗トルクなどの外乱に比べて、充分大きくすることができる。しかし、瞬時に発生するトルク量
が小さいため、時間をかけて徐々に角運動量を獲得してゆくことで、制御を行う。ホイールのアンロ
ーディング、バイアス方式でのロール軸外乱制御やスピン軸制御等で使用される。ソレノイドを通過
する電流によってトルクを発生させるため、推進剤の消費に伴う寿命の制約が無く、またスラスタの
ように、排気によって衛星周辺の空間、または機器を汚染(コンタミネーション)する懸念も無い。
磁気による姿勢制御には、受動的制御と、能動的制御が考えられる。受動制御の例として、赤道軌
道上を周回する衛星では、赤道上では地磁場ベクトルの方向が一定なため、一定の磁気モーメントを
発生できるダイポールを衛星に搭載することで、磁気モーメントが地磁場のベクトルの方向に沿って
安定し、発生トルク無しの状態を作ることができる。
能動制御では、発生磁気モーメントの大きさ、方向を、ある基準に従って変化させ、また必要な場
合のみ加えることで有効トルクを作り出し、任意の姿勢を得るものである。
希望のトルク量を得るためには、衛星位置での地磁場の磁束密度を知る必要があり、センサによっ
て観測的に知る方法と、地磁場のモデルから衛星位置での磁束密度を算出する方法がある。後者では
正確な磁束密度を知ることができないため、姿勢偏向のような目的では使用せず、ホイールのアンロ
ーディングのように、蓄積角運動量を必要とするようなミッションで使用される。
3−2 磁気トルカの制御方法
磁気トルカの出力制御方法として現在、抵抗を使用し電流制御を行うシリーズレギュレータ方式と、
高周波により電圧制御を行うパルス幅変調方式がある。
20
シリーズレギュレータ方式の原理を以下に示す。二電源型と一電源型があるが、どちらも原理は同
一である。可変抵抗を制御し、電流量を調節することで、発生磁気モーメントの制御を実現する。一
電源型では、極性切り替え信号が別に必要となる。
図3−2−1
二電源型
一電源型
シリーズレギュレータ方式の原理(NASDA HDBK1016 より)
パルス幅変調(Pulse Width Modulation:PWM)方式は、高い周波数で電圧パルスを加え、パル
ス周期の調節によって、実効的な電流値を変えることなく磁気モーメントを制御する方式であり、コ
イルから発生する回生電流を積極的に利用する方式である。PWM 方式の構成を図3−1−2に示す。
図3−2−2
PWM 方式の構成(NASDA HDBK1016 より)
一周期に対しての、パルスの立ち上がり時間の比をデューティー比と呼び、デューティー比の変化が、
出力制御の実体である。デューティー比は次の式で定義される。
Duty =
パルスの立ち上がり[s]
ON期間
=
パルスの一周期[s]
ON期間 + OFF期間
(3−1−1)
PWM 方式では、下図の様に電圧は一定であり、その立ち上がりの周期(間隔)によって、与えら
れる電力が変化する。実際には、オフ期間にコイルから発生する回生電流によって電流が絶えないた
め、図3−2−3のような矩形波状の電流とはならない。またデューティー比が 100%となった場合
は、直流通電である。
21
一周期[s]
ON
OFF
on
off
20%
ON
30%
OFF
ON
50%
OFF
ON
80%
OFF
ON
100%
OFF
図3−2−3
PWM 波形とデューティー比
先に述べたように、オフ期間にも回生電流が流れるため、平均電流はオン期間の電流と、回生電流
の和である。しかし、インダクタンスのために電流の変化は電圧に対して遅れるため、リプル(脈動)
を生じる原因となる。また、リプルを小さくするために PWM 周期を上昇させることは効果がある
が、高い周波数ではインダクタンスの影響によって、実効的な電流が流れず、磁気モーメントが発生
しづらくなる恐れがある。
そのため、磁気トルカの設計においては、入力抵抗などと共に、インダクタンスを規定する必要が
ある。
2 つの方式の比較として、シリーズレギュレータ方式では、回路は大きく、重く、また消費電力も
大きくなる。一方 PWM 方式では、これらのシステムリソースが不要であるが、回路が複雑となる。
22
3−3 ヘルムホルツコイルの原理[2]
磁気センサの較正のために、標準磁場の発生源として利用されるヘルムホルツコイルを製作し実験
を行う。ヘルムホルツコイルは、平行に配置されたコイルによって、一様な磁場を得ることができる
装置である。以下にその原理を記す。
コイルを流れる電流素 I・dr による、コイルの中心を通る軸上のある一点 P への磁場の影響は、以
下のように表される。
dB =
µ 0 ⋅ I ⋅ sin θ
dr
4π ⋅ r 2
(3−3−1)
rは電流素から点 P への距離で、コイルの半径 a、作用点までの水平距離 d より、以下のように
表される。
r = a2 + d 2
(3−3−2)
I・dr
r
a
dB
P
d
図3−3−1
電流素による点 P への寄与
ここで、電流素による寄与をコイルの一周回について積分を行うと、式3−3−1は次のように書き
改められる。(ビオ・サバールの法則)
µ 0 ⋅ I ⋅ sin θ
dr
C
4π ⋅ r 2
B=∫
(3−3−3)
式(3−3−3)においてループの1周(2πa)について積分操作を実行すると、各電流素のつ
くる磁束密度のうち、コイルの径方向は互いに打ち消しあうため、軸方向の成分のみが残る。よって
次式を得る。
B = 2π ⋅ a ⋅
µ0 ⋅ I a
⋅
4π ⋅ r 2 r
µ ⋅ I ⋅ a2
= 0
2 ⋅ r3
(3−3−4)
巻き数nを持つソレノイドの場合は、次式のようになる。
µ 0 ⋅ I ⋅ a2
B=
n
2⋅r3
(3−3−5)
ここで半径が等しい二つのコイルを距離dだけ隔てて平行に設置し、等しい電流を与えた場合に、
23
二つのコイルの中間点に発生する磁束密度を考える。
I・dr
I・dr
r1
r2
a
z=0
d
2
図3−3−2
d
2
大きさの等しい二つの電流素が空間に存在する場合
二つのコイルの中間点を原点とし、コイルが設置される場所はそれぞれ、±d/2 である。これらの
条件より式3−3−5を変形する。コイル1、コイル2のそれぞれの電流素から中間点への距離をr
1 、r2とする。
µ 0 ⋅ I ⋅ a2 ⋅ n 1
+ 1
B=
3
3
r
2
r2
1
2
µ ⋅ I ⋅ a ⋅ n
1
= 0
+
3
2
2
a 2 + z + d
2
1
3
2
d
a 2 + z −
2
(3−3−6)
式中の z は作用点の座標であり、原点として定義して、z=0 を代入する。式が煩雑になるため、r
に関する部分のみについて展開、整理する。
r ( z ) −3 = r1
−3
+ r2
−3
2
2
d
= a + z +
2
d
r (0) −3 = a 2 +
2
2
d2
= a 2 +
4
−
d2
= 2 ⋅ a 2 +
4
−
3
2
3
2
3
2
d
+ a 2 + −
2
d2
+ a 2 +
4
−
−
−
2
2
2
d
+ a + z −
2
−
−
3
2
(3−3−7)
3
2
3
2
3
2
(3−3−8)
ここで r (z ) の微分を行い、コイルの近傍の空間で磁場が一様となる条件について考察する。r (z ) の
24
一階微分および二階微分は、それぞれ以下のようになる。
z− d z+ d
2
r ' ( z ) = −3 5 2 +
5
r1
r2
2
2
d
z − d
z +
1
1
2
2
r ' ' ( z ) = −3 5 + 5 + 15
+
7
7
r2
r2
r1
r1
(3−3−9)
(3−3−10)
二つのコイルの中央付近の磁場の様子を求めるために式3−3−9、3−3−10に z=0 を代入
すると、式は次のようになる。
r ' (0) = 0
(3−3−11)
− a2 + d 2
r ' ' ( 0) = 6
r7
(3−3−12)
二階微分の結果から、a=d の場合において、二つのコイルの中心での磁場の変化が最も小さくなる
ことが分る。
よって、a=d として式3−3−8を式3−3−6に代入することで、二つのコイルの間に発生する
磁束密度についての基本式を得ることができる。
B = µ0 ⋅
8 n⋅ I
[T]
125 a
(3−3−13)
ここで電流 I は、コイル 1 つ当たりに必要な電流であるので、使用の際には、算出値の 2 倍となる。
このように a=d と な る よ う に二 つのコイル を配 置し た も の を、 特に ヘルムホルツコイル
(Helmholtz Coils)と呼び、d/a はヘルムホルツ比と呼ばれる。図3−3−3は、ヘルムホルツ比
の変化に対する、単独コイルとヘルムホルツコイルの磁束密度の比をプロットした図である。ただし
図中の水平軸に示されている z/a において、z=a/2 である。単独コイルに対して、ヘルムホルツコイ
ルはより広い領域で、一様な磁界を発生できる様子が図から見て取れる。
図3−3−3
磁場のプロット(稲垣直樹,「電磁気学」より)
25
第4章
北海道衛星の姿勢制御系
4−1 システム構成、仕様
4−1−1 要求精度
北海道衛星における姿勢制御系の目的は、地球観測、光通信、軌道制御時におけるポインティング
及び姿勢の安定化である。それぞれのタスクにおける要求精度を表4−1−1に示す。特徴としては、
日照・日陰の双方での 3deg 以内の姿勢制御精度が必要なことが挙げられる。
表4−1−1
タスク
地球観測
光通信
軌道制御
姿勢決定精度
±3 deg
±3 deg
>3 deg
要求精度
姿勢制御精度
±3 deg
±3 deg
>3 deg
備考
日照
日陰
リモートセンシング衛星において、一般的に±3deg の要求精度は非常に粗い(通常は 0.1deg オー
ダー)。北海道衛星の運用される高度 567km からは、観測範囲は 60km 程度の円状の範囲に広がっ
てしまう。しかし北海道衛星では、ハイパースペクトルカメラに搭載された可動ミラーにより、ある
程度の姿勢擾乱を補償することができる。
4−1−2 姿勢外乱解析
姿勢外乱の主要因として、ここでは空気抵抗トルク(Ta)、重力傾斜トルク(Tg)、地磁気トルク(Tm)、
太陽輻射圧トルク(Tr)の 4 つを検討した。本衛星システムにおける軌道高度に対する各外乱トルクの
概算値を図4−1−1に示す[1]。
図4−1−1 外乱トルク要因と大きさ(北海道衛星設計資料より)
図4−1−1から、高度 400km 程度までは、衛星に働く外乱として空気抵抗によるトルクが最も
大きいが、それ以上の高度では他の外乱要素よりも急激に減衰し、北海道衛星の運用予定高度である
567km では、地磁気によるトルクが支配的となる。
これより、高度 567km での主要外乱は地磁気トルクであり、地磁気トルクの最悪値を外乱トルク
TD=1.3e-5Nm として考慮する。重力傾斜、太陽輻射圧によるトルクは 1%以下であるので、ここで
は特に考慮しない。
26
4−1−3 設計要求
要求精度より、3 軸ゼロモーメンタム方式での見積もりを行った。センサ、アクチュエータの構成
を表4−1−2に示す[1]。
表4−1−1 姿勢制御系構成
数量
電力[W]
重量[kg]
3 軸 磁気センサ
2
0.30
0.32
2 軸 地球センサ
1
0.80
1.40
1 軸 角速度センサ
4
2.40
0.30
GPS
1
1.35
0.28
磁気トルカ x-軸
1
0.30
0.45
y-軸
1
0.30
0.45
z-軸
1
0.30
0.45
リアクションホイール x-軸
1
3(max)
0.40
0.75
y-軸
1
3(max)
0.40
0.75
z-軸
1
3(max)
0.40
0.75
1
2.25
0.50
センサ
アクチュエータ
制御ユニット
1.00
ハーネス
17.00(max)
9.20
合計
7.40
4−1−4 姿勢制御系の基本構成
アクチュエータは非冗長構成とし、3 つのリアクションホイールとアンローディングのための 3 軸
の磁気トルカからなる。構成を図4−1−1に示す。
Sensors
Attitude Determination
and Control
3-axis Magnetometer
Actuators
RW Driver Unit
Reaction Wheels
Rate gyro
2-axis horizon sensor
Attitude
Determination and
Control Computer
MT Driver Unit
3- axis Magnetic Torqure
GPS
図4−1−1
姿勢制御システム構成図(北海道衛星設計資料より)
27
4−1−5 制御に要する磁気トルカの磁気モーメント
4−1−2項において、高度 567km での外乱の大きさが見積もられた。それを元に、制御に要す
る磁気モーメントを求める。発生トルクと磁気モーメントの関係は、第 3 章にて述べたように、次
の関係がある。
T = M m × B [Nm]
(4−1−1)
軌道高度 567km、軌道傾斜角 97.65deg の場合において、衛星の物体座標系(xyz がロール、ピッ
チ、ヨー)から見た地磁気ベクトル[Bx By Bz]の絶対平均値 Bave は、
Bave=[1.7×10-5 7.0×10-6 2.3×10-5]
である[1]。
Bave の値より、平均的な磁気トルカによる制御トルクはヨー軸周りに最も小さい。磁気モーメント
M の最大値が 6Am2 の場合において、ヨー軸周りには、1.4×10-4Nm のトルクが平均的に発生でき
る。これは外乱トルクの補償としては充分な値である。外乱トルクが 1.3×10-5Nm 程度であること
を考慮すれば、1 周回での蓄積角運動量は、1/10 周回でのアンローディングが可能である。デスピン
に要する時間は、分離時に与えられた 3rpm 程度の初期回転において 7000 秒程度であり、約 1.5 周
回でのデスピンが可能である。磁気モーメントは、高度 567km での地磁気を 20μT として外乱トル
クと共に式4−1−1から求めた。式からは約 0.6Am2 となるが、制御力に余裕を持たせるため、10
倍の 6Am2 とした。
4−2 姿勢制御系の制御モード
4−2−1 初期姿勢補足モード
北海道衛星の初期姿勢補足は、衛星分離から太陽捕捉に至るまでの制御モードであり、分離後の「デ
スピン」、角運動量獲得のための「スピンアップ」、電力維持のための「太陽捕捉」という3つのシー
クエンスより成る。
28
2)デスピン
ロケットからの切り離しの際、衛星には数 rpm 程度の角速度が与えられている。磁気トルカ、
磁気センサ、慣性センサを使用し、任意軸周りの回転状態から、角速度を 0.5rpm まで落とすこ
とを目的とする。
1) スピンアップ
デスピンと同様のセンサ、アクチュエータを使用し、スピン軸(ここでは y 軸、ピッチ軸)周
りの角運動量を、バイアス角運動量近傍へ制御することを目的としている。ニューテーション(ス
ピン軸の円錐運動)を防ぐため、常に角運動量の変化を監視しつつ、3 軸の磁気トルカを使用し
てフィードバック制御する方法と、スピン軸周りの角速度のみを制御する方法の 2 通りが考えら
れるが、現段階では、単純で信頼性が高いため、後者を検討している。
2) 太陽捕捉
これまで使用してきたセンサ、アクチュエータに加え、粗太陽センサを使用し、スピン軸と太
陽のなす角度(太陽角)を 75°近傍(誤差 5°以内)に制御することが目的である。
4−2−2 地球捕捉モード
初期姿勢捕捉を完了し、慣性空間に対する姿勢が確立され電力維持が可能となった後、地球指向の
軌道座標系に対する姿勢を確立し、定常モードへ移行するための制御モードである。
「スピン軸制御」、
「モーメンタムホイールの起動」「地球捕捉」という 3 つのシークエンスからなる。
1) スピン軸制御
磁気センサを使用し、75°の太陽角を維持しつつ、衛星のスピン軸を軌道法線方向に向けるこ
とを目的としている。サンパルス(太陽センサが太陽を捉えた際に発生する信号)の発生時に計
測された地磁気ベクトル、地磁気モデルによる地磁気ベクトル、粗太陽センサによる太陽角の情
報から、スピン軸の慣性空間に対するベクトルを導出する。
2) モーメンタムホイールの起動
スピン軸制御で得た衛星の角運動量を、モーメンタムホイールに転換することで、地球捕捉に
移るためのフェイズである。モーメンタムホイールにより角運動量が転換されると、衛星はピッ
チ軸周りに緩やかな回転を行う。
3) 地球捕捉
コニカル(円錐)スキャン型の地球センサによって、ピッチ軸周りにスキャンし、地球に対し
ての衛星の姿勢を検出する。
4−2−3 定常運用モード
定常運用モードでは、地球センサと IRU の情報を基に、カルマンフィルタによって 3 軸周りの姿
勢を決定する。このとき、赤外領域に感度を持つ地球センサにより、日陰、日照によらない姿勢決定
が可能である。
4−2−4 セーフホールドモード
北海道衛星では、制御系故障時の対応として、「セーフホールド姿勢」と呼ぶ電力収支が保証でき
る姿勢に移行・維持する。ここでのセーフホールド姿勢とは、バイアス角運動量を有する y 軸(ピッ
チ軸)と太陽方向のなす角を一定に制御し、ピッチ軸周りに数 rpm で回転している状態を指してい
る。日照時は太陽センサを用いた能動的なバイアス軸の制御を行い、日陰時は衛星の角運動量の剛性
によって日陰突入前後の姿勢を維持することにより能動制御を行わない。
29
第5章
磁気トルカシステムの設計
5−1 磁気トルカシステム
磁気トルカシステムは、磁気を発生させるトルクロッド部、発生磁場の検出・地球磁場の検出をお
こなうセンサ部、駆動回路部から構成される。システムの構成ブロックを以下の図に示す。
トルクロッド
1 軸制御回路
電力:各軸 2 対
電源:各軸 1 対
信号:各軸 1 本
磁気センサ
電源へ
図5−1−1
磁気トルカシステム
前章での検討から、表5−1−1に要求性能をまとめる。北海道衛星用磁気トルカの性能要求値に
ついて、ここで、トルクロッド重量の 50%を回路、マージンとして、またケースなどのために割り
当てるように検討する。よって、トルクロッド部の重量は 300g 程度に納めることが望ましい。ここ
で、磁気トルカは 2 重冗長構成(予備のシステムが 1 つ)とする。また 2 重故障は無いものと考え、
システムを検討する。
表5−1−1
発生磁気モーメント[Am2]
動作電圧[V]
システム重量[g]
トルクロッド部重量[g]
消費電力[W]
磁気トルカ要求性能(1 軸当たり)
6
5
≦450
≦300
0.3
5−2 トルクロッドの見積もり
トルクロッド部の構造を以下に示す。本節では、図のような構造の場合について、重量などの見積
もりを行う。中心にコアがあり、その上にコイル(図中の黒部分)を装着したボビンを取り付ける。
また、先に述べたように 2 重冗長システムを成すために、コイルに絶縁のためにカプトンシートを
巻きつけ、2 段目のコイルを巻きつける。2 段目のコイルにも絶縁を施し、シェルを取り付け、トル
クロッド部の完成とする。ここでカプトンシートとは、耐熱・絶縁性・耐久性に優れた素材であり、
人工衛星の表面保護に用いられる琥珀色のシートである。
30
シェル
絶縁体
2段目コイル
絶縁体
1段目コイル
ボビン
コア
図5−1−2
トルクロッド断面図
トルクロッドのサイズ見積もりには、始めにコアの寸法を決定する必要がある。そのためにコアの
径とコアの長さを定義するが、数値調整のパラメータとしてコアの直径を選択した場合、径の増加の
2 乗に比例して重量が増加するため、わずかな径の増加によって目標値を超えかねない。よって、数
値調整にはコアの長さを使用するものとする。
トルクロッドの構成部材の重量は、それぞれ次のような式で表される。ここで、絶縁に使用する
カプトンシートは、重さおよび厚さを無視できるものとする。
2
D
mc = core ⋅ π ⋅ ρ core ⋅ Lcore [kg]
2
コアの重量:
(5−2−2)
ρcore:コアの密度[kg/m3]
ボビンの重量:
(
) π4 ⋅ ρ
m b = φ bobbin − φ core ⋅
2
2
bobbin
⋅ Lcore [kg] (5−2−3)
φbobbin:ボビンの外径[m]
φcore:ボビンの内径[m](コアの外径)
ρbobbin:ボビンの密度[kg/m3]
コイルの重量(1 段目):
mcoil(1) =
コイルの重量(2 段目): mcoil( 2)
( Dcore + 2T )
⋅ π ⋅ ρ wire ⋅ Lcore [kg]
(5−2−4)
Dwire
(D + 2T + 2Dwire )
= core
⋅ π ⋅ ρ wire ⋅ Lcore [kg](5−2−5)
Dwire
T:ボビンの厚さ[m]
ρwire:ワイヤの密度[kg/m3]
Dwire:ワイヤの径[m]
シェルの重量:
(
) π4 ⋅ ρ
m s = φ out − φ in ⋅
φout :シェルの外径[m]
φin:シェルの内径[m]
ρshell:シェルの密度[kg/m3]
31
2
2
shell
⋅ Lcore [kg]
(5−2−6)
また、磁気トルカが発生する磁気モーメント M は、次の式で表される。
M = B⋅
m 1
⋅
[Am2]
ρ µo
(5−2−7)
B:磁束密度[T]
m:コアの質量[kg]
ρ:コアの密度[kg/m3]
μ0:真空の透磁率[H/m]
m/ρがコアの体積を表すため、体積 Vcore[m3]を導入し、式5−2−7を書き換えることができる。
−1
M = B ⋅ Vcore ⋅ µ 0 [Am2]
(5−2−8)
また磁束密度 B は次のように表される。
−1
B = µ 0 µ eff ⋅ n ⋅ I ⋅ Lcore [T]
(5−2−9)
μeff:コアの実効透磁率
n:コイルの巻数
I:磁場の発生に必要な電流[A]
Lcore:コアの長さ[m]
ここで、コアの実効透磁率(Effective Permeability)μeff は、コアの長さ Lcore と直径 Dcore の比、
すなわち Lcore Dcore に比例する量である。 Lcore Dcore を p とするとき、実効透磁率は次の式で表
される[2]。
µ eff
1 ln ( p ) − 1
=
+
p 2
µa
−1
(5−2−10)
p:コアの長さ・径の比
μa:コアの初期比透磁率
実効透磁率は、式中の p を無限大にする(半径に対して、長さが無限大)と、実効透磁率は、初
期比透磁率μa に等しい。
式5−2−9から、磁気トルカの発生する磁気モーメントの大きさは、コアの実効比透磁率に比
例するため、コアには、実効透磁率の大きな物質を選ぶことが重要である。また5−2−10から、
コアの形状は、太く短いより、細く長い方が性能を上げるためには有利であることがわかる。
コアに鉄または、45 パーマロイを使用した場合の、L/D の変化に伴う実効透磁率の変化を図5−
2−1に示す。パーマロイ(Permalloy)とは、 透磁的合金(Permeable Alloy) から取られた名
称である。Fe-Ni 合金であり、高い初期比透磁率を持ち、残留磁気、保持力が小さい強磁性材料で
ある。45 は Ni の割合をあらわす。初期比透磁率として、鉄では 150、パーマロイでは 10000 を初
期条件として考慮した。
32
2500
パーマロイ
鉄
2000
μeff
1500
1000
500
0
1
10
L/D
100
L/D と実効透磁率
図5−2−1
図5−2−1の結果から、磁気トルカのコアとして、パーマロイがより適しているといえる。ま
た、45 パーマロイの初期比透磁率は約 10000 であり、初期比透磁率の高さでは 78 パーマロイ
(150000)に劣るが、飽和磁束密度が約 1.5T と大きいために(78 パーマロイでは約 0.8T)、磁気
飽和が起きにくく、広いレンジで出力の直線性を保つことができるため、磁気トルカのコアとして適
している。また、磁気モーメント発生に必要な電流 I は、式5−2−8、式5−2−9を整理し、式
5−2−11で求められる。
I=
M
[A]
n ⋅ µ eff ⋅ Acore
(5−2−11)
Acore:コアの断面積[m2]
n:コイルの巻き数
ここで、巻き数 n は次のようにも表すことができる。
n=
Lcore
Dwire
(5−2−12)
Lcore:コアの長さ[m]
Dwire:ワイヤの径[m]
磁気トルカの消費電力 P を次のように定義する。
P = I 2 R [W]
(5−2−13)
コイルの抵抗 R は次のように表される。
R =σ ⋅
Lwire
[Ω]
Awire
(5−2−14)
σ:導体の抵抗率[Ω・m]
Lwire:ワイヤの長さ[m]
Awire:ワイヤの断面積[m2]
式5−2−8について、抵抗率は本来、ρを使用すべきであるが、既に密度の記号として使用し
ており、また、本論文中では混同の恐れが無いため、σを抵抗率の代表記号として使用する。
33
また、Lwire はコアの長さ Lcore を使用して次のように書き改めることができる。
L wire = π ⋅ Dcore ⋅ n = π ⋅ Dcore ⋅
Lcore
[m]
Dwire
(5−2−15)
よって、トルクロッドの重量、消費電力はともにコアの長さの関数として表すことができ、重量と
消費電力のトレードオフの点から、最適なコアの長さを知ることができる。
ここで、コアを直径 0.01mの 45 パーマロイ製、ボビンを厚さ 1mm の GFRP 製、シェルを厚さ 0.01m
の GFRP 製、ワイヤを径φ0.3mm の銅製として、見積もりを行った。ここでトルクロッドの径は、
コアにボビン・2 段コイルを装着し 13.2mm となるが、作業性を考慮しコイルとシェルに間に 1mm
程度の間隙を設け、シェルの内径を 15mm とする。よって、トルクロッドの径は 17mm とした。結
果を図5−2−2に示す。グラフ中の「m_Total」は、トルクロッドの重量である。
結果から、コアの長さ 0.31m において、重量、消費電力ともに、設計目標値付近にあることが分か
った。しかし、重量 304g、消費電力 0.317W となり、やや目標値を超過している。
100
m̲Total[kg]
power loss[W]
電力[W],重量[kg]
10
1
0.1
0.2
0.3
0.4
0.5
0.1
0.01
コアの長さ[m]
図5−2−2
コアの長さの変化に伴う、重量・消費電力の変化
ここで、軽量化のためにコアの径を小さくし、実行透磁率を増加させて性能向上を図ることを考え
る。径の変化による電力の増減を、コアの径と直径の比(L/D)ごとにプロットしたものが、図5−
2−3のグラフである。
結果として、L/D の増加は全体として省電力化には影響するものの、径の減少によって逆に消費電
力が大きくなる傾向が明らかとなった。これは式5−2−11に示したように、電流はコアの断面積
に反比例するが、断面積は直径の 2 乗に比例するため、抵抗に比べ変化が大きいためだと考えられる。
また、式5−2−8および、式5−2−9から、磁気モーメントは次のようにも表される。
M = µ eff ⋅ n ⋅ I ⋅ Acore [Am2]
(5−2−16)
よって、発生磁気モーメントはコアの断面積、すなわちコイルのループ面積に比例するため、極端
なコアの径の減少は性能の低下を招くことになる。性能向上のためには、コイル巻き数、また実効透
磁率を大きくするため、コア長さの増加が有効となる。
このことから、コア径を 10mm とした今回の設計では、原理的に目標値内に収めることができない。
ただし重量については、充分に設計マージン内であるので、設計変更における若干の増加は許容でき
る。検討結果については、後述する。
34
1.E+06
L/D=10
L/D=20
L/D=30
L/D=40
L/D=50
1.E+05
1.E+04
電力[W]
1.E+03
1.E+02
1.E+01
1.E+00
0
0.005
0.01
0.015
0.02
0.025
0.03
1.E-01
1.E-02
コアの径[m]
図5−2−3
コア径の変化による電力の変化
5−3 PWM 方式による磁気トルカの駆動
磁気トルカの駆動は、PWM 方式を採用する予定である。磁気トルカは単純なコイルであるため、
周波数成分を持つ信号を与える際には、インダクタンスを規定することが必要となる。磁気トルカの
インダクタンスは次式で与えられる。式中のμcore はコアの比透磁率であり、ここでは実効透磁率を
用いた。またコアにはボビンが装着されるため、Acore は Abob を用いた。
−1
L = K ⋅ µ 0 µ core ⋅ n 2 ⋅ Acore ⋅ Lcore [H]
(5−3−1)
K は、長岡係数と呼ばれ、コイルの形状による係数であり、得られた寸法から 0.98 である。式5
−3−1から、コイルのインダクタンスを次のように求めることができる。
L = 0.248 [H]
ここで、インダクタンスの値が得られ、またすでに抵抗の値が既知であるため、これらから時定数
τ[s]を見積もることができる。時定数が上がることにより、高い周波数の入力に対応できなくなり、
その結果、高い PWM 周波数では、有効電力の効率が低下してしまう。LR 回路の時定数は、次の式
から求められる。
τ=
L
[s]
R
(5−3−2)
時定数とは、電流変化に対する、回路の過渡応答を見積もる概念である。電流投入から、電流が最
大値の 63.2%まで上昇、または電流を絶ってから最大値の 36.8%まで減衰する時間を表す。これま
でに得られた値から北海道衛星用磁気トルカの時定数は、
τ=
0.248
= 26.32 [ms]
9.42
よって、PWM 制御を行う場合、利用する最低のデューティー比が回路の時定数を下回らないよう、
周波数を決定する必要がある。ここで、使用できるデューティー比の下限を 10%とし、最小のパル
スの立ち上がり期間 t を 30ms と仮定する。この場合、1 周期は 300ms となる。よって、最小立ち
上がり期間tが 30ms を下回らないためには、PWM 周波数は 3Hz 以下であることが求められる。
時定数と PWM 周波数 T[Hz]の関係は次のようになる。
35
τ ≤t
1
≥T
10t
(5−3−3)
(5−3−4)
周波数変化に対する変化を視覚化するために、周波数増加によるインピーダンスの変化を等価回路
を使用して見積もる。
L[H]
R[Ω]
5V
図5−3−1
磁気トルカ等価回路
見積もりには、電子回路シミュレータ「OrCAD Family Release9.2 Lite Edition」を使用した。
図5−3−2に結果を示す。
0.6
0.5
電流[A]
0.4
0.3
0.2
0.1
0
1
10
図5−3−2
100
周波数[Hz]
1000
10000
周波数による電流変化
この結果からも、北海道衛星用磁気トルカでは、PWM 波がおおむね 3Hz 以下の周波数であれば、
電流の損失が小さいことが示された。なお解析では電流値に制限を設けていないため、図中の電流値
には、単純にオームの法則による値が示されている。
36
5−4 磁気トルカ周辺の磁場の解析
「FEMAP」を使用し、磁場の解析を行った。解析には簡単のため、1/4 モデルを使用した。解析
条件を以下の表にまとめる。
空気
y[mm]
磁気トルカ
x[mm]
図5−4−1
表5−4−1
N・I[AT]
通電断面積[m2]
電流密度[AT/m2]
比透磁率
1/4 モデル
解析条件
171.273
1.05×10-4
199819.36
10000
図5−4−1 に示した 1/4 モデルによる解析の結果を図5−4−2に示す。また、磁気トルカに垂
直な方向(図5−4−1のx軸方向)の 1 次元的な磁束密度の変化の様子を、図5−4−3に示す。
解析の結果から、磁気トルカ(図5−4−3のグラフでは、右側に磁気トルカが存在)から垂直に
20cm 程度離れた空間においても 8G 程度の磁束密度が存在しており、この結果からは、フィードバ
ック系の構築のために 10G 以上のレンジを持つセンサの採用が必要となる。またそれ以下のレンジ
のセンサとの併用には、磁場の減衰を待つなどタイミングに注意を要する。
図5−4−2
磁気トルカ周辺の磁束密度(単位:[T])
37
図5−4−3
磁気トルカ周辺の磁束密度の変化
5−5 磁気トルカの取り付けについて
取り付け冶具について、シェルを装着した磁気トルカの直径は見積もりでは約 17mm であるので、
ここでは、最も単純に 17mm の取り付け穴を開けたものを検討する。また、重量は取り付け冶具一
つ当たり 30 程度を上限とする。冶具の形状を図5−5−1に示す。なお、各部に 3mm の肉厚を持
たせ、衛星への取り付けにはφ5.0mm のねじを使うものとする。ねじ部分については、削孔部(ね
じきり部分)の重量と、ねじの重量が相殺すると仮定し、見積もりでは特に考慮していない。
11[mm]
23[mm]
11[mm]
17[mm]
22[mm]
27[mm]
5[mm]
45[mm]
図5−5−1
磁気トルカ取り付け冶具
この設計から体積 VF は、
VF = 5.446 × 10 −6 [m3]
取り付け冶具の重量 MF は、材質にはアルミを使用するものとして、密度ρ=2.7×103kg/m3 を乗
38
じ、約 14.7g である。この値は上限値の約半分であり、よって剛性が不足する場合、各辺において、
20%程度の増加を許容できる。
駆動回路について、ケース、電子基板を合わせた重量は 60g 程度を想定して見積もりを行う。し
かし電子回路については、部品の選定、回路の設計により重量が変化し、また一般式を考えること
ができないため、ここでは数値による見積もりを行わない。ただし、ケースについてはある程度の
サイズを予想することで、見積もりが可能である。ケース外観を図5−5−2に示す。ここでケー
スには、インターフェイスとして、RS-232 コネクタ(15 ピン)が 3 箇所設置されているものとす
る。
20[mm]
50[mm]
100[mm]
図5−5−2
電子回路用ケース
厚さ 1mm のアルミ板 6 枚により構成されているとすると、その重量 Mcase は次の値となる。
M case = 4.32 [g]
コネクタの重量を 1 つ当たり 5g 程度とすると、回路は約 40g 程度で作成すべきである。
コアの寸法を検討し、設計から得られた北海道衛星用磁気トルカシステムの緒元を、表5−5−1
に一覧する。
表5−5−1
インターフェイス
動作電圧[V]
コア材質
コア径[mm]
コア長[mm]
ボビン材質
シェル材質
トルクロッド重量
トルクロッド径[mm]
電流[A]
抵抗[Ω]
消費電力[W]
北海道衛星用磁気トルカシステム緒元
D-sub9,RS-232
5
45 パーマロイ
<10
320〜500
GFRP
GFRP
268@φ9×320
16
189.0
7.77
0.276
39
5−6 CubeSat 用小型磁気トルカの設計
これまでの北海道衛星用磁気トルカの設計で得られた手法を応用し、CubeSat 用小型磁気トルカ
の設計、試作を行う。
CubeSat は軌道高度 800km にて運用されることは序論で既に述べたが、第 4 章・図4−1−1
に示した軌道高度と外乱トルクの関係図から、高度 800km においても地磁気トルクが支配的であり、
大きさはほぼ一定である。従って CubeSat には、北海道衛星との重量比から 1/50 の外乱が働くと
考えられる。そのため、要求磁気モーメントは、6Am2 の 50 分の1に、余裕を見込んだ 0.15Am2
とした。
CubeSat 用小型磁気トルカの要求性能を表5−6−1に示す。また、サイズの制約が大きいため、
CubeSat 用小型磁気トルカは絶縁のみでボビン、シェルを特に考慮しない構造とした。また、コイ
ルの抵抗値を大きくするため、ワイヤを 2 段巻きとする。
表5−6−1
発生磁気モーメント
動作電圧
システム重量
消費電力
CubeSat 用小型磁気トルカ要求性能(1軸当たり)
0.15[Am2]
5[V]
≦20[g]
0.1[W]
見積もりから、次の図5−6−1のような結果が得られたが、コアの長さ 3cm 以下での製作は、困
難と考えたため、CubeSat のサイズから、コアの長さ 5cm での製作を行った。
電力[W],重量[g]
1.00E+01
1.00E+00
0
0.02
0.04
0.06
0.08
1.00E-01
1.00E-02
power[W]
mass[g]
1.00E-03
コアの長さ[m]
図5−6−1
CubeSat 用小型磁気トルカの重量、消費電力
40
0.1
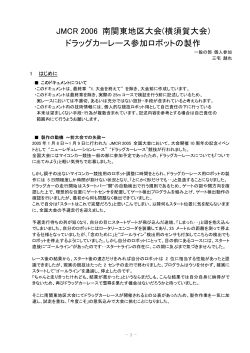
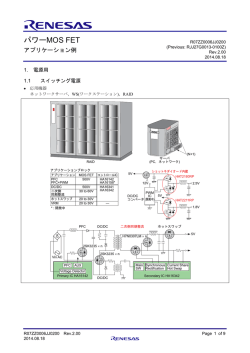
図5−6−2に、試作した CubeSat 用小型磁気トルカを示す。図の上から、磁気トルカ外観、コ
イル、コアである。
外観
コイル
コア
図5−6−2
試作した CubeSat 用小型磁気トルカ
試作した CubeSat 用小型磁気トルカの緒元を以下の表5−6−2に示す。
表5−6−2
コイル巻き数
コイル抵抗[Ω]
インダクタンス[H]
時定数[s]
コイル重量[g]
電流[A]
電力[W]
試作小型磁気トルカの特性値
317
1.7
26.93×10-3
15.84×10-3
1.737
444.0×10-3
0.335
また、得られた値を元に等価回路での高周波特性の見積もり、磁場解析、周辺の磁束密度の分布の
見積もりを行った。表5−6−3に解析条件を、図5−6−3、図5−6−4および図5−6−5に
結果を示す。等価回路によるシミュレーションの結果、北海道衛星用磁気トルカよりも、さらに低い
周波数(2Hz 程度)で電流が大きく減衰する可能性が示された。また、垂直に 10cm 離れた空間に
置いても 10G 程度の磁束密度が存在しており、北海道衛星の場合と同様に、磁気センサとの同時使
用はできないと考えられる。
3.5
3
電流 [A]
2.5
2
1.5
1
0.5
0
1
10
図5−6−3
100
周波数[Hz]
1000
周波数による電流変化
41
10000
表5−6−3
140.748
3×10-5
4691600
10000
N・I[AT]
通電断面積[m2]
電流密度[AT/m2]
比透磁率
図5−6−4
図5−6−5
解析条件
磁束密度の分布(単位:[T])
磁気トルカ周辺の磁束密度の変化
42
5−7 磁束密度の分布の測定
5−7−1 磁束密度測定に使用したセンサ
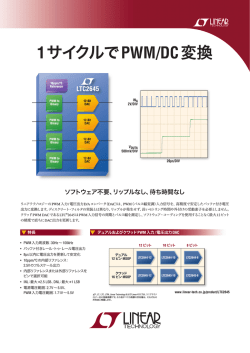
磁束密度の測定には、内橋エステック株式会社製の「MI センサ」(図5−7−1)を使用した。
センサに使用されている MI 素子とは、透磁率の高い磁性線に高周波電流を印加したときに、磁性線
のイ ン ピ ー ダ ン スが 電 流 通 電 方 向 に印 加さ れ た 外 部 磁 界 に よ っ て 敏感に 変化 する 現象
(Magneto-Impedance effect:磁気インピーダンス効果)を利用した素子である。
自作磁気センサについては、付録bにて別途記載している。
図5−7−1
MI センサ(内橋エステック㈱ HP より)
43
5−7−2 磁気センサを使用した磁束密度のマッピング
試作した CubeSat 用小型磁気トルカを中心に、周辺の磁束密度を磁気センサによって測定する。
磁場解析から、磁気トルカ周辺では 1000μT 以上の磁束が発生しており、値が大きすぎるため、1/10
の電流での実験を行う。測定は図のような 2cm ごとに区切った点で行う。それぞれの点には 1〜15
の番号を振る。
磁気トルカ
1
0〜2[cm]
2[cm]
2[cm]
6
2〜4[cm]
10
11
4〜6[cm]
5
15
図5−7−2
磁束密度のマッピング
測定から、以下の結果を得た。表5−7−1に、2cm ごとの系列として表示する。
表5−7−1
1
2
3
4
5
〜2[cm]
点番号
磁束密度[G]
3.15
1.89
1.26
0.63
0
系列ごとの磁束密度の分布(10 倍換算)
〜4[cm]
点番号
磁束密度[G]
6
1.26
7
1.134
8
0.63
9
0.252
10
0
〜6[cm]
点番号
磁束密度[G]
11
0.63
12
0.63
13
0.252
14
0
15
0
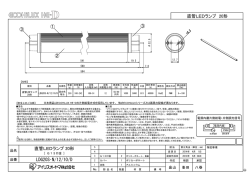
表5−7−1をグラフ化し、図5−7−3に示す。画面奥が、磁気トルカの位置である。グラフか
ら距離に従って磁束密度が減衰する傾向が明らかとなった。また、磁場解析により垂直方向の磁場分
布の変化が予想されているため、得られた値との比較を行った(図5−7−4)。その結果、センサ
から得た値は、磁場解析による見積もりの 1/5〜1/16 程度と大きく値が異なっている。
44
磁束密度[T]
3.5
3
2.5
2
1.5
1
0.5
0
1
〜2[cm]
2
〜4[cm]
3
〜6[cm]
4
5
図5−7−3
磁気トルカ周辺の磁束密度の視覚化
25
センサによる値
磁場解析による値
磁束密度[G]
20
15
10
5
0
2
2.5
3
距離[cm]
3.5
図5−7−4
センサによる値と磁場解析による値の比較
4
解析結果を元に CubeSat 用小型磁気トルカの磁束密度の測定を行ったが、シミュレーションによ
る結果と、実験結果が一致せず、最大で測定結果に対して、シミュレーション結果との間に 15 倍程
度の差が見られた。このことは、実験に対して、モデルの再検討、測定法の再検討という 2 つ可能性
を与えるものであるが、シミュレーションモデルは、測定対象のジオメトリ、電流などの不確定要素
の無い条件から構成されるため、この場合測定法に手落ちがあったものと考えるのが妥当である。
考えうる要因として、地磁場バイアスの中での測定、屋内での測定の実施、また、センサは磁気ト
ルカに対して平行または直角な位置関係で測定を行ったため、磁力線の方向と一致せず、本来の値で
はなく、本来の磁力線方向とセンサ方向との間の角度のコサインに比例した値が測定された可能性な
どが考えられる。この場合、磁力線とセンサの方向が 60deg]異なっていると、センサ値は真値の半分
として観測される可能性がある。
45
第6章
結論
本研究では、北海道衛星用姿勢制御系の一部である、磁気トルカシステムの設計、見積もり、コン
ピュータシミュレーションによる磁場の解析を行った。その結果として、小型衛星搭載用磁気トルカ
システムの設計手法を開発した。これにより、北海道衛星 1 号機「大樹」用磁気トルカの開発・製
作が可能となった。
次に、本研究により得られた設計手法を基に、CubeSat 用小型磁気トルカシステムの設計、小型
磁気トルカの試作、性能評価を行った。
次に磁気センサの設計・製作を行い、磁気トルカの出力を知ることができる環境を作ることができ
た。
本研究により、重要なハードウェア部分についてはほぼ設計を終え、今後制御ロジックの開発を行
うことで、小型衛星用磁気トルカシステムを完成させることが可能となる。
また今後、放射線曝露、恒温槽試験、振動試験等の宇宙環境試験を行い、宇宙用として使用するた
めの性能評価を行うことが必要である。
それにより、北海道衛星の一部としてだけではなく、確立された人工衛星用コンポーネントとして、
他の衛星開発プロジェクトへの提供も可能となると考えられる。
46
謝辞
本研究の遂行、本論文に対しての大きな期待を抱いてくださり、また研究のみならず、
就職活動等の学生生活の大きな部分において、鈴木勝裕教授には平素から多大なるご支
援、助言を戴くことができました。この場にて、深く感謝の意を述べさせていただきま
す。
常日頃から暖かい励ましと、ご指導を頂きました佐々木一正教授に、心よりの感謝の
意を表します。
佐々木正巳教授には、修士論文の副査としてだけではなく、電子回路の設計に関わる
知識一般を講義してくださり、大変お世話になりました。本研究をまとめるにあたり、
心より感謝申し上げます。
三橋龍一助教授には、北海道衛星プロジェクトの実行役として、また研究を行う上で
様々なご恩を賜ることができました。心より感謝申し上げます。
指導教員として、折に触れて、基礎的考察また発展的展望を与えてくださり、また研
究者について一考を戴くことができました佐鳥新助教授に、この場をお借りして、感謝
の意を述べさせていただきます。
また、本研究を共に推進し、北海道衛星姿勢制御系および、CubeSat 姿勢制御系の設
計に多大なるご尽力を下さった、北海道大学大学院情報科学研究科複合情報学専攻混沌
系工学研究室教員である石村康生氏、大学院生である杉本康一郎氏、学士である五十嵐
大学氏、(有)先端技術研究所研究員である伊藤康正氏ら諸氏に、心より感謝申し上げま
す。
本システムのエレクトロニクスの設計・製作に当たっては、宇宙空間産業研究会の廣
田尚久氏、(有)先端技術研究所研究員の木崎隆義氏、長田淳氏より、指導、助言を戴く
ことができました。心より感謝申し上げます。
本論文の執筆にあたり、実験等の工学的な手続きについて、北海道工業大学電気電子
工学科学士である、上田亮、飛田敬規両君には多大な協力を戴くことができ、深く感謝
いたします。また、活動の励ましとなってくれた、佐鳥研究室の諸氏にも感謝を述べさ
せていただきます。また設計に当たり、有用な情報をいただくことができ、九州大学八
坂研究室の坂本祐二氏、田中陽介氏、若槻太健氏にも、感謝いたします。
本研究の遂行は、関係諸氏の御協力、御助言なくしては有り得ず、この成果を論文と
してまとめるにあたり、改めて皆様に深く、深く、感謝の意を表します。
最後に、自分の活動について最も理解を示してくださり、また最も強く支え続けてく
れた父と母には、言葉にし難い感謝の念があります。この場をお借りして、深く感謝の
意を表します。
47
参考文献
第2章
[1] 古濱洋治等,「NASDA 技術ハンドブック 1016
宇宙開発事業団,2003
人工衛星姿勢制御系コンポーネント解説書」,
第3章
[1] 古濱洋治等,「NASDA 技術ハンドブック 1016 人工衛星姿勢制御系コンポーネント解説書」,
宇宙開発事業団,2003
[2] 稲垣直樹,「電磁気学」,コロナ社,2000,p122-124
第4章
[1] 北海道衛星プロジェクト,「北海道衛星
姿勢制御系の設計」,2004
第5章
[1] 北海道衛星プロジェクト,「北海道衛星 姿勢制御系の設計」,2004
[2] K.H.Fonacon,「The magnetic field experiment onboard Equator-S and its scientific
possibilities」,1999,p3-4
[3] 「地磁場の測定 準備編」,2004 年 12 月 27 日
http://www.geocities.co.jp/Technopolis/6224/geomagnetism3.html
[4]「理科年表 平成 16 年度版」,丸善株式会社,2004,p757
[5]「MI センサユニット データシート」,内橋エステック株式会社,2004
付録
[1] 2 軸磁気センサ「HMC1022」データシート,Honeywell,1999,p3-12
[2] 計装アンプ「AD623」データシート,ANALOG DEVICES,1999,p11
[3] タイマ IC「LM555」データシート,National Semiconductor,2000,p7-8
[4] デュアルパッケージ FET「IRF7105」データシート,International Rectifier,1997,p1-7
研究業績
(1) 田中吹雪,上島広史,佐鳥新 フォーメーションフライト技術確立のための基盤技
術実証衛星 ,大学・高専宇宙工学コンソーシアム,2002
(2)田中吹雪,上島広史,菅原崇史,佐藤立博,佐鳥新 超小型マイクロ波エンジンシス
テムの開発 ,大学・高専宇宙工学コンソーシアム,2003
(3) 上島広史,田中吹雪,佐鳥新 超小型マイクロ波エンジンの研究 ,電子情報通信学
会北海道支部インターネットシンポジウム,2003
(4) 上島広史,金尚郁,伊藤康正,佐鳥新 3W 級マイクロ波エンジンの作動特性 ,第
32 号北海道工業大学研究紀要,2003
(5) 上島広史,田中吹雪,佐鳥新 超小型マイクロ波エンジンのシステム設計 ,電気・
情報関係学会北海道支部連合大会,2004
(6) 菅原崇史,上島広史,佐鳥新 超小型ブラシレスモータによるリアクションホイー
ルの基礎研究 ,電気・情報関係学会北海道支部連合大会,2004
(7) 上島広史,難波江亮,要貴浩,下岡彩子,佐藤立博 平成 16 年度における北海道工
業大学での宇宙関連プロジェクトの取り組み ,大学・高専宇宙工学コンソーシアム,
2004
(8) 上島広史,石村康生,飛田敬規,上田亮,廣田尚久,佐鳥新 小型衛星用磁気トル
カの設計、試作 ,第 33 号北海道工業大学研究紀要掲載予定,2005
48
研究業績
(1) 田中吹雪,上島広史,佐鳥新 フォーメーションフライト技術確立のための基盤技
術実証衛星 ,大学・高専宇宙工学コンソーシアム,2002
(2)田中吹雪,上島広史,菅原崇史,佐藤立博,佐鳥新 超小型マイクロ波エンジンシス
テムの開発 ,大学・高専宇宙工学コンソーシアム,2003
(3) 上島広史,田中吹雪,佐鳥新 超小型マイクロ波エンジンの研究 ,電子情報通信学
会北海道支部インターネットシンポジウム,2003
(4) 上島広史,金尚郁,伊藤康正,佐鳥新 3W 級マイクロ波エンジンの作動特性 ,第
32 号北海道工業大学研究紀要,2003
(5) 上島広史,田中吹雪,佐鳥新 超小型マイクロ波エンジンのシステム設計 ,電気・
情報関係学会北海道支部連合大会,2004
(6) 菅原崇史,上島広史,佐鳥新 超小型ブラシレスモータによるリアクションホイー
ルの基礎研究 ,電気・情報関係学会北海道支部連合大会,2004
(7) 上島広史,難波江亮,要貴浩,下岡彩子,佐藤立博 平成 16 年度における北海道工
業大学での宇宙関連プロジェクトの取り組み ,大学・高専宇宙工学コンソーシアム,
2004
(8) 上島広史,石村康生,飛田敬規,上田亮,廣田尚久,佐鳥新 小型衛星用磁気トル
カの設計、試作 ,第 33 号北海道工業大学研究紀要掲載予定,2005
49
付録
付録a
ヘルムホルツコイル設計用プログラム
/******************************
* ヘルムホルツコイル設計用プログラム
* プロンプト付き
* テキスト出力
* 2005/02/05
******************************/
#include <stdio.h>
#include <math.h>
#define u0 0.0000012556 /* 真空の透磁率 */
void main(void)
{
double c = 0;
double a = 0;
double n = 0;
double i = 0;
double B = 0;
double Bd = 0;
double er = 0;
FILE *fp;
/*
/*
/*
/*
/*
/*
/*
定数
*/
コイルの半径 */
コイルの巻き数*/
電流
*/
計算された磁場*/
希望の磁場 */
許容差
*/
fp=fopen("result.txt","a"); /*open a file in append mode*/
printf("Enter a Magnetic Flux Density in Micro Tesla¥n-> ");
scanf("%lf", &Bd);
fprintf(fp, "Bd = %0.2f[µT]¥n", Bd);
c=
8 / pow(125,0.5);
er = Bd / 1000;
printf("%lf ± 0.1[%%]¥n", Bd);
printf("
B[µT],
a[cm],
z[cm],
fprintf(fp, "
B[µT],
a[cm],
n,
z[cm],
i[A],
n,
i[A],
[%%]¥n");
[%%]¥n");
for(a=1 ; a<21 ; a+=0.1) /* コイル の半径[cm] */
{
for(n=1 ; n<31 ; n++) /* 巻き数 */
{
for(i=0.0 ; i<2.1 ; i+=0.1) /* 電流[A] */
{
B=u0*c*n*i/(a/200)*1e6; /* 磁束密度[μT] */
if((B >= Bd-er) & (B <= Bd+er)) /* 表示範囲 の設定 ±
0.1[%] */
{
50
printf("%0.5lf,
"%0.5lf,
%0.2lf,
%0.2lf,
%0.2lf,
%0.2lf,
%0.2lf,
%0.2lf,
%0.1lf,
%0.1lf,
%0.2lf¥n",
B, a, a/2, n, i, (B-Bd)/Bd*100);
fprintf(fp,
%0.2lf¥n",
B, a, a/2, n, i, (B-Bd)/Bd*100);
}
}
}
}
fprintf(fp, "¥n");
fclose(fp);
51
はじめ
希望の磁束密度 Bd[μT]
変数の定義
n:コイルの巻数
a:コイルの半径[cm]
i:電流[A]
巻数n:1〜30,n++
半径 a:1〜20,a+=0.1
電流 i:0.1〜2,i+=0.1
B = µ0 ⋅
n⋅I
125 a
8
Bd− ≦B≦Bd+
No
Yes
B,n,a,i
:処理
:入力
:ループ開始端
:ループ繰返し端
n,a,i
:条件判断
:出力
終了
:プログラムの端
}
図a−1
プログラムの動作
52
付録b 磁気センサ
b−1 設計
今回、磁気トルカの出力測定のために磁気センサを設計・製作したが、試作段階のため、付録とし
て掲載する。
磁気センサの設計に際して、センサの要求性能を規定する必要がある。今回設計した磁気センサは、
軌道上での運用を考えず、地上での実験のみを考え設計を行った。可観測レンジ、価格、入手の難易
などから、磁気センサとして、米国 Honeywell 社製の磁気センサ IC・HMC1022 を使用した。実際
の測定には使用できていないが、磁界へのほぼリニアな反応が確認できている。また、センサ IC の
可観測レンジも±6G(分解能 85μT)と非常に優れた製品である。
ただし、ここで行った設計では、信号増幅用のオペアンプへは正電源のみを供給しているため、逆
方向の磁場を検出できない仕様となっている。またオフセット補償端子を使用していないため、出力
には一定のバイアスがある。(回路破損以前で、0G 付近で 11mV 程度)
図5−3−1
磁気センサ
HMC1022
HMC1022 の主要諸元を以下に示す[1]。
表b−1
HMC1022 主要諸元
観測レンジ[G]
分解能[G]
センサ感度[mV/V/G]
ブリッジ出力オフセット[mV]
観測可能軸数
磁界検出方法
±6
85×10-6
1〜1.2
±2.5typ
2
磁気抵抗素子
HMC1022 は、磁界により電気抵抗値が変化する素子(磁気抵抗素子)を使用し、ブリッジ回路に
よって電圧差として磁束密度を検出する。HMC1022 のデータシートを基に、磁気センサ回路の設計
を行った。センサのブロック図を以下に示す。
53
10[V]
電源IC
5[V]
クロック
回路
アンプ1
ADコン
バータ
(TBD)
磁気センサ
セット/リ
セット回
路
アンプ2
図b−2
磁気センサ回路
ブロック図
HMC1022 からの出力は磁束密度 1G あたり 1mV であるので、オペアンプを使用して信号を増幅
する必要がある。出力信号は二つの信号の電位差として出力されるため、増幅には差動増幅回路を使
用する。しかし一般的な、入力に抵抗を接続した差動増幅回路では、増幅度を外部抵抗によって容易
に設定できる反面、オペアンプ自体の高入力抵抗を利用できないため、抵抗の精度によって増幅性能
が充分に発揮されない場合がある。そのため、この場合のような微小な信号の増幅には、インストゥ
ルメンテーションアンプ(計装アンプ)を使用する。計装アンプは、非反転増幅回路と差動増幅回路
を連結した構造である。差動増幅回路の原理を図b−3に、計装アンプの原理を図b−4に示す。
R2
R1
●
Vin
R1
●
+
○
●
Vout
R2
R2
G=
R1
図b−3
差動増幅回路原理図
54
非反転増幅部
差動増幅部
R3
+
Vin
●
-
R4
●
R2
●
-
R1
R2
●
●
+
R3
●
+
2 R2 R4
G = 1 +
R
1 R3
R4
○
Vout
●
図b−4
計装アンプ原理図
計装アンプとして使用した AD623 では、図中の抵抗のうち R2 から R4 までが IC 内部ですべて
50kΩに調整済みであり、ゲインは外付けの抵抗、R1 ただひとつによって決定される。よって、ゲ
インを決定する抵抗を RG とすると、ゲインは次の式で表される[2]。
G =1+
100[ kΩ]
RG
(b−1)
今回製作した回路では、RG として 1kΩを使用し、回路のゲインを 101 倍とした。AD623 の仕様
を表b−2に示す[2]。
表b−2
動作電圧[V]
増幅度
差動入力電圧範囲[V]
入力オフセット電圧[μV]
出力オフセット電圧[μV]
動作温度[℃]
AD623 主要諸元(単電源動作の場合)
最小値
標準値
最大値
2.7
12
1
1000
-6
6
25
200
200
1000
-40
85
55
図b―5
AD623
計装アンプ
また、HMC1022 では、磁気抵抗素子に使用しているパーマロイ薄膜の帯磁による感度の劣化を防
ぐため、断続的に電流パルスを与え磁化履歴の初期化を行う必要があり、そのために Set/Reset 回路
を必要とする[1]。パルスの発生源として、タイマ IC・LM555 を使用した。
LM555 を使用した非安定バイブレータの発周期は、外付けの抵抗 RA、RB およびキャパシタ C に
より決定される。パルスの立ち上がり時間 t1、立下り時間 t2 は次の式で求められる。
t 1= 0.693( R A + RB ) ⋅ C [s]
t2 = 0.693 ⋅ RA ⋅ C [s]
図b−6
クロック発生源
(b−2)
(b−3)
LM555
LM555 のみでは消磁のための充分な電流を得られないため、N チャネルおよび P チャネルの FET
を使用したプッシュプル回路を構成し、ドライブ能力の向上を図る。パルスの入力による Set/Reset
信号発生のタイミングチャートを、図b−7に示す。
56
5[V]
クロック波形
0[V]
4〜14[V]
Set
2[μs]
Set/Reset 波形
‐4〜14 [V]
Reset
図b−7
Set/Reset タイミングチャート
磁気センサのデータシートの記述では、パルス周期を 50ms 以上に設定することが示されているた
め、製作した回路では約 62ms とした[3]。Set/Reset 回路の構成を、クロック部と FET 部に分割し、
図b−9(a)および図b−9(b)に示す。FET 部に使用した IRF7105 は、N チャネル・P チャネルの
FET が同一パッケージ内に収められている。
図b−8
デュアルパッケージ FET IRF7105
5[V]
RA
5〜6[V]
39kΩ
8
4
7
RB
100kΩ
6
220Ω
1μF
2
LM555
Clock
3
FET
2,4
5
C
1μF
1
5
2
3
6
IRF7105
4
7
3
8
1
0.01μF
(a)
クロック部分
図b−9
(b)
Set/Reset 回路
57
FET 部分
Magnetometer
8,14
以上のブロックから構成される磁気センサ回路の外観を、図b−10に示す。HMC1022 のデータ
シートに記載されている接続は、FET 部分に一部誤りがあるため、IRF7105 のデータシートを元に、
製作した回路では修正してある[4]。
図b−11
表b−3
磁気センサ回路
磁気センサ回路仕様
0-6
10
165.627(96.327/69.3)
101
観測レンジ[G]
動作電圧[V]
Set/Reset 周期[s]
信号増幅率
磁気センサの出力をオシロスコープに接続し、ヘルムホルツコイルの出力を変化させたときの変化
を観測する。実験は図b−10のような構成で行う。
コイルを並列に接続した場合、今回製作したヘルムホルツコイルの出力スケールファクタは
0.6A/G である。これは、発生磁束密度 1G あたり、電流 0.6A が必要であることを表現している。し
かし電流源として使用している安定化電源の能力が最大で 1.3A 程度であるため、ヘルムホルツコイ
ルを直列接続し、発生磁場のレンジを広げる(測定点を増加させる)。よってこの場合のスケールフ
ァクタは 0.3A/G である。
図b−12
磁気センサの出力特性観測実験
58
実験から次の表b−3の結果を得た。
電流[A]
0.0
0.3
0.6
0.9
1.2
表b−3 磁気センサ特性評価結果
予想される磁束密度[μT]
予想のセンサ出力[mV]
実際のセンサ出力[mV]
0
0
11
100
101
90
200
202
230
300
303
350
400
404
450
出力電圧[mV]
図b−11に、結果をグラフ化して示す。
500
450
400
350
300
250
200
150
100
50
0
予想のセンサ出力
実際のセンサ出力
0
0.2
0.4
図b−13
0.6
電流[A]
0.8
1
1.2
磁気センサ出力特性
結果から、センサの出力にはバイアス分が存在することが明らかとなった。そのため、先にも述べ
たように、このセンサを使用しての測定には、バイアス分の補正が必要となる。また出力にもノイズ
のような成分が混じっており、波形を歪ませていた。
図b−14
センサ波形の拡大
59
10[V]
CTL
7
5[V]
0.1[μF]
OFFSET A‑
BRIDGE
A
OUT A+
R1
39[kΩ]
OUT A‑
15
16
2
14
1
3
13
12
4
HMC1022
5
10
11
7
9
6
8
0.1[μF]
S/R B+
GND
BRIDGE
B
OUT B‑
R2
100[kΩ]
C1
1[μF]
D(p)
D(p)
D(n)
D(n)
2
OUT
THRES
DISCH
GND 3
8
7
Vcc
1
IN LM7805
0.33[μF]
GND
1
2
6
LM555
3
5
3
8
OFFSET A+
S/R A‑
S/R A+
GND
OUT B+
OFFSET B‑
OFFSET B+
S/R B‑
0.1[μF]
RG‑
IN‑
IN+
Vs‑
RG‑
IN‑
IN+
Vs‑
RG[kΩ]
1
5
7
6
3
8
2
AD623
4
RG[kΩ]
1
5
7
6
3
8
2
AD623
4
RG+
Vs+
OUT
REF
RG+
Vs+
OUT
REF
60
TRIG
OUT
RESET
4
5
6
4
IRF7105
2
1
0.01[μF]
220[Ω] S(n)
1[μF]
G(n)
S(p)
G(p)
磁気センサ回路図(オフセット補償なし)
図b―15
付録c ヘルムホルツコイル
c−1 ヘルムホルツコイルの設計
第 3 章・原理に示した式3−4−13を用いて、実際に 100μT(1G)を発生することができるヘ
ルムホルツコイルの設計、製作を行う。
設計のために、コイルの半径 a(コイル間の距離 d)、コイルの巻き数 n、電流 i をパラメータとし
たプログラムを製作し、最適な数値の組み合わせを求めた。付録bにて、ソースリスト、フローチャ
ートを示す。
プログラムの実行結果を表c−1に示す。出力される結果には、±0.1%のフィルタリングを施し
た。
表c−1 プログラム実行結果
B[μT]
100.032
100.032
100.032
100.032
100.032
100.000
100.000
100.000
99.987
99.958
99.958
99.958
99.958
99.958
99.958
100.032
100.032
100.032
100.032
100.032
2a[cm]
9.7
9.7
9.7
9.7
9.7
11.5
11.5
11.5
12.4
15.1
15.1
15.1
15.1
15.1
15.1
19.4
19.4
19.4
19.4
19.4
z[cm]
4.85
4.85
4.85
4.85
4.85
5.75
5.75
5.75
6.2
7.55
7.55
7.55
7.55
7.55
7.55
9.7
9.7
9.7
9.7
9.7
n
i[A]
3
6
9
18
27
4
8
16
23
6
7
12
14
21
28
6
9
12
18
27
[%]
1.8
0.9
0.6
0.3
0.2
1.6
0.8
0.4
0.3
1.4
1.2
0.7
0.6
0.4
0.3
1.8
1.2
0.9
0.6
0.4
0.03
0.03
0.03
0.03
0.03
0
0
0
-0.01
-0.04
-0.04
-0.04
-0.04
-0.04
-0.04
0.03
0.03
0.03
0.03
0.03
表中の 2a はコイルの直径、 z はコイルの半径及び二つのコイル間の距離である。また表中
の [%] は、設定値からのずれを表している。計算結果から、磁束密度が同じ値であり、コイル径
が同一であれば、巻き数が多いほど磁場発生に要する電流が小さい傾向が得られた。またどの値も、
設定値からの誤差は 0.1%以下であり、どの値を採用してもほぼ 100μT(=1G)の磁束密度を得る
ことができる。
算出された値を基にヘルムホルツコイルの設計、製作を行うが、その際に数値に適合するボビン(ワ
イヤ巻きつけ用の芯材)を用意することは困難である。そのためボビンとしてガムテープロールを使
用した。理由として、ある程度の大きさの直径が得られ、また減少方向への径の調節が容易なためで
ある。
製作したヘルムホルツコイルでは、ボビンの径が近いため、直径 9.7cm、巻き数 18、電流 0.3A を
採用した。また原理に述べたように、電流は 1 コイル当たりの値であるため、使用の際には、1G あ
たり 0.6A が必要となる。
61
図c−1
表c−2
コイル直径[cm]
コイル間距離[cm]
コイル巻き数
出力スケールファクタ[A/G]
ヘルムホルツコイル
ヘルムホルツコイルの仕様
9.70
4.85
18
0.6
c−2 ヘルムホルツコイル周辺の磁場のシミュレーション
ヘルムホルツコイルが発生する磁場の分布、大きさの見積もりのために、有限要素法によるシミュ
レーションを行う。解析には、「FEMAP」を使用した。表c−2に示した仕様を、解析条件として
モデル化する。解析対象となる物質は、電流による磁場の発生源である「コイル(銅)」、コイルを取
り囲む「空気」である。解析結果を図c−2(a)、図c−2(b)に示す。(a)は 1 つのコイルのみに電流
を与えた場合、(b)はヘルムホルツコイルとして動作させた場合である。
(a) 単独コイル
( b ) ヘルムホルツコイル
図c−2 コイル周辺の磁場のシミュレーション(単位:[T])
図c−2(b)から、二つのコイルの中間辺りでは、80×10-6 から 120×10-6T(0.8〜1.2G)の磁場
62
が発生している。この結果から、ほぼ 100μT の磁場の発生が期待できる。
c−3 ヘルムホルツコイルが発生する磁場の推定
ヘルムホルツコイルが実際に発生している磁束密度を知るため、方位磁針を使用した推定を行う。
ヘルムホルツコイルの発生磁気ベクトルが地磁気ベクトルに対して垂直となるように設置し、二つの
コイルの中間に方位磁針を設置する[3]。(図c−3)
この状態でコイルに磁場を発生させ、地磁場との合力によって方位磁針に生じる偏角を測定する。
ここで、コイルの磁場を知るためには、地磁気の大きさが既知でなくてはならない。そのため、理科
年表(2004 年度版)より、大学所在地である札幌付近での地磁気の水平分力の値を求める。資料か
ら札幌付近での水平分力の値として、27μT(=0.27G)を得た(図c−4)[4]。この値を基に推定を
行う。
地磁気ベクトルを BE 、コイルが発生する磁気ベクトルを BI とするとき、二つのベクトルとその間
の角度θには以下の関係がある。
tan θ =
BI
BE
(c−1)
地磁気のベクトル
BE
コイルの磁気ベクトル
BI
図c−3
偏角θ
磁場推定実験設置図
63
図c−4
日本各地での地磁気の水平分力(単位:[nT],理科年表平成 16 年度版より)
式c−1の関係を基に、以下のような装置構成で実験を行った。コイルに通電させ、その際の方位
磁針の偏角θを測定する。
コイル
b
a
電流源
b’
a’
A
電流計
図c−5
磁束密度推定実験
測定の結果、偏角は約 75°であった。式c−1を変形し、この値を代入し BI を求める。
BI = BE ⋅ tan θ = 27 ⋅ 10 −6 ⋅ tan 75 = 100.76 ⋅ 10 −6 [T]
(c−2)
方位磁針を用いた実験の結果、および前項で述べた磁場解析の結果から、このヘルムホルツコイル
を標準磁場の発生源として使用できるといえる。
また、二つの並列なコイルに流れる電流の合計が 0.6A であるため、結線 a‐b’が形成する磁場が
方位磁針に干渉しない様に配置に配慮し、下図のように直列にコイルを接続することで、並列の場合
に対して半分の 0.3A での 100μT の出力が可能である。実際に直列接続では、半分の電流値で並列
接続と同じ偏角を得ることができた。
64
コイルの接続法によって、出力のスケールファクタが変化するため、製作・使用の際には充分に注
意する必要がある。
コイル
b
a
電流源
b’
a’
A
電流計
図c−6
ヘルムホルツコイル直列接続の例
65
© Copyright 2026 Paperzz