Yaskawa Siemens CNC シリーズ
結合説明書・機能編(暫定版)
基本編(Part1) 資料番号 DE0400309-1
安川シーメンス NC 株式会社はシーメンス株式会社に統合の後,2010 年 8 月より
シーメンス・ジャパン株式会社へ社名を変更いたしました。本書に記載の「安川
シーメンス NC 株式会社」などの社名に類する名称は「シーメンス・ジャパン株式
会社」へ読み替えをお願いします。
本マニュアルは Yaskawa Siemens 840DI,Yaskawa Siemens 830DI 両モデル用に
作成されています。本文中の記述では両モデルの機能差は区別されておりませんの
で,それぞれのモデルにどの機能が標準装備されているか,どの機能がオプション
で装備可能かについては別途,機能一覧表をご参照ください。また,本文中に
840DI と言った表現が出て来ますが,830DI も意味していることがあるとご理解
ください。
1.1 各種インタフェース信号 (A2) - - - - - - - - - - - - - - - - - - - - - - 1-1
1.1.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1
1.1.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-2
1.1.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-33
1.1.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-34
1.1.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-46
1.1.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-83
1.1.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-86
1.2 送り軸監視機能及びプロテクションゾーン (A3) - - - - - - - - 1-91
1.2.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-91
1.2.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-92
1.2.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-133
1.2.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-134
1.2.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-145
1.2.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-152
1.2.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-156
1.3 連続送り,イグザクトストップモードと先読み (B1) - - - - 1-163
1.3.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-163
1.3.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-163
1.3.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-188
1.3.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-188
1.3.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-194
1.3.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-195
1.3.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-195
1.4 加減速制御 (B2) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-197
1.4.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-197
1.4.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-198
1.4.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-207
1.4.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-208
1.4.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-213
1.4.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-213
1.4.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-213
1.5 診断機能 (D1)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-215
1.5.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-215
1.5.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-216
1.5.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-242
1.5.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-242
1.5.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-245
1.5.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-245
1.5.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-246
1.6 簡易対話プログラミング(D2)- - - - - - - - - - - - - - - - - - - - 1-249
1.6.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-249
i
1.6.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-250
1.6.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-277
1.6.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-278
1.6.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-278
1.6.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-278
1.6.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-279
1.7 突き当て停止 (F1)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-281
1.7.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-281
1.7.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-281
1.7.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-293
1.7.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-293
1.7.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-299
1.7.6 例例例例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-302
1.7.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-302
1.8 位置指令単位と検出単位 (G2) - - - - - - - - - - - - - - - - - - - - 1-305
1.8.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-305
1.8.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-306
1.8.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-344
1.8.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-344
1.8.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-369
1.8.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-369
1.8.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-369
1.9 補助機能出力 (H2) - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-373
1.9.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-373
1.9.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-375
1.9.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-391
1.9.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-392
1.9.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-400
1.9.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-406
1.9.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-411
1.10 運転モードの種類とプログラム運転モード (K1) - - - - - - 1-417
1.10.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-417
1.10.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-418
1.10.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-466
1.10.4 データの説明 (MD,SD)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-466
1.10.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-488
1.10.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-511
1.10.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-515
1.11 軸構成及び座標系(K2) - - - - - - - - - - - - - - - - - - - - - - - 1-525
1.11.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-525
1.11.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-532
1.11.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-585
ii
1.11.4 データの説明 (MD,SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-586
1.11.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-608
1.11.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-610
1.11.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-613
1.12 通信機能 (K4) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-617
1.12.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-617
1.12.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-618
1.12.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-623
1.12.4 データの説明 (MD, SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-624
1.12.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-629
1.12.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-631
1.12.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-634
1.13 非常停止入力 (N2) - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-635
1.13.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-635
1.13.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-636
1.13.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-641
1.13.4 データの説明 (MD, SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-641
1.13.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-641
1.13.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-643
1.13.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-643
1.14 直径指定/半径指定 (P1)- - - - - - - - - - - - - - - - - - - - - - - 1-645
1.14.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-645
1.14.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-646
1.14.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-649
1.14.4 データの説明 (MD, SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-649
1.14.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-650
1.14.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-650
1.14.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-650
1.15 基本的 PLC プログラム (P3) - - - - - - - - - - - - - - - - - - - - 1-651
1.15.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-651
1.15.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-653
1.15.3 補足条件 および NC VAR セレクタ - - - - - - - - - - - - - - - - - - - - - - 1-703
1.15.4 ブロック説明- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-719
1.15.5 信号/データの説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-836
1.15.6 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-842
1.15.7 STEP7 でのプログラミングにおける役立つポイント - - - - - - - - - 1-848
1.15.8 マシンデータ , アラーム - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-856
1.16 原点復帰 (R1) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-859
1.16.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-859
1.16.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-860
1.16.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-885
1.16.4 データの説明 (MD, SD) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-889
iii
1.1.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-908
1.1.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-912
1.1.7 データフィールド、リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-912
1.17 主軸機能 (S1) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-915
1.17.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-915
1.17.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-916
1.17.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-954
1.17.4 データの説明 (MD,SD)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-955
1.17.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-974
1.17.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-988
1.17.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-988
1.18 送り機能 (V1) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-993
1.18.1 概略説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-993
1.18.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-995
1.18.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1031
1.18.4 データの説明 (MD,SD)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1031
1.18.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1043
1.18.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1057
1.18.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1057
1.19 工具補正 (W1) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1061
1.19.1 概要 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1061
1.19.2 詳細説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1064
1.19.3 補足条件 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1163
1.19.4 データの説明 (MD,SD)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1164
1.19.5 信号の説明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1182
1.19.6 例 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1182
1.19.7 データフィールド,リスト - - - - - - - - - - - - - - - - - - - - - - - - - - - 1-1183
iv
1.1 各種インタフェース信号 (A2)
1.1.1 概略説明
内容
本ファンクション説明では,様々なインタフェース信号の機能について説明しま
す。ここで述べる機能は,全般的に関連のあるものとを取上げます。他のファン
クション説明には含まれてません。
非同期イベント
CNC は,マシンに生じる非同期イベントに対応した特定のリアクションを起動す
ることができます。PLC ユーザプログラムは,NC の PLC インタフェースを介し
て,こうしたイベントを報告します。NC は,この PLC インタフェースを周期的
に処理し,関連ある内部リアクションを起動します。
ステータスのシグナリング
NC はまた,インタフェースを介して様々なファンクションステータスを示す信号
を PLC に送ります。信号を受け取った PLC のユーザプログラムが,マシン別にそ
れらを処理します。
外部メモリからのプログラムを処理する,エクステンション(SW4 以降)
ワークピースが複雑な場合,NC のメモリでは加工が十分に行えないことがありま
す。こうした場合には,
「外部メモリからのプロセス (Process from external memory)」
ファンクション(EXTCALL)を使用すると,外部メモリ(MMC 102/103 のハード
ディスクなど)からサブプログラムを呼出して処理することができます。
PLC 変数の読取り/書込み(SW4 以降)
これらのモジュールのインタフェースメモリ(デュアルポート RAM)内には,
PLC と NC の間で高速に情報交換を行うためのメモリエリアが確保されています。
I/O,DB,DW,マーカなどあらゆるタイプの変数がこのメモリエリア内でやりと
りされます。
1-1
1.1.2 詳細説明
■ 一般事項
PLC/NCK インタフェース
PLC ユーザプログラムと NCK,MMC,MCP の各エリア間の信号およびデータの
やりとりは,基本 PLC プログラムによって定義されます。
PLC/NCK インタフェースは,データインタフェースおよびファンクションインタ
フェースから構成されます。
PLC ユーザプログラムから NCK へ指示されたタスクは,ファンクションインタ
フェースを介して伝達されます(同時軸をトラバースする場合など)。ファンク
ションインタフェースは,ファンクションコール(FC)により作成されます。
PLC ファンクションコールに関する詳細情報については次を参照してください。
参照: 1.15 基本的 PLC プログラム (P3)
以下の信号とデータグループは明確に区別されています。
• 制御信号およびステータス信号の周期的な信号のやりとり
• イベントによって引き起こされる信号のやりとり(補助ファンクションおよび
G ファンクション)。これについては次を参照してください。
参照: 1.9 PLC 補助機能出力 (H2)
すべての PLC/NCK インタフェース信号,製造業者が使用するファンクションブ
ロック,および割当てられたデータブロックについては次を参照してください。
参照: パラメータ一覧
信号の周期的なやりとり
PLC/NCK インタフェースの制御信号およびステータス信号は,基本 PLC プログラ
ム(OB1)により周期的に伝達されます。
これらの信号は,さらに次のグループに分けられます。
• 一般的な NC 別信号
• モードグループ別信号
• チャンネル別信号
• 軸/スピンドル別信号
インタフェースの構造および基本プログラムファンクションについての詳細は,
次を参照してください。
参照: 1.15 基本的 PLC プログラム (P3)
すでに述べたように,このファンクション説明に記載されているのは,PLC イン
タフェースの制御およびステータス信号の中でも,全体的に重要な意味を持ち,
他のファンクション説明では説明されていないもの(IS "Servo enable" など)に限
定されています。したがって,これ以降は,そのような PLC インタフェース信号
だけを取上げて説明します。
1-2
一般的な信号 (DB10)
PLC から NC への信号
• CNC 入力および出力に影響を与える信号
• キースイッチ信号(およびパスワード)
NC から PLC への信号
• CNC 入力の実際値
• CNC 出力のセットポイント
• NC,NCK,MMC からのレディ信号
• NC ステータス信号(アラーム信号)
チャンネル別信号 (DB21, ...)
PLC から NC への信号
• 制御信号 "Delete distance-to-go"(移動距離削除)
NC から PLC への信号
• NC ステータス信号(NCK アラームアクティブ)
軸/スピンドル別信号 (DB31, ...)
PLC から NC への信号
• 軸/スピンドルへの制御信号(フォローアップモード,サーボイネーブルなど)
• ドライブ ( バイト 20,21) への制御信号
NC から PLC への信号
• 軸/スピンドルからのステータス信号(位置コントローラアクティブ,電流コ
ントローラアクティブなど)
• ドライブ ( バイト 93,94) からのステータス信号
(注)1.1.7 に,このファンクション説明で述べたインタフェース信
号とデータの一覧表があります。PLC/NCK インタフェースの
概略図については,次を参照してください。
参照:1.15 基本的 PLC プログラム (P3)
■ PLC へのレディ信号 (DB10)
(注)下記に示したインタフェース信号の詳細については,1.1.5 の
「■ NC から PLC への信号 (DB10)」を参照してください。
NCK CPU レディ (DB10, DBX104.7)
NCK の CPU がレディ状態で,周期的に「レディ」信号を PLC に送ります。
MMC CPU1 レディ (DB10, DBX108.2) (DB10, DBX108.3)
(DB10, DBX108.2) MMC から MPI へ
(DB10, DBX108.3) MMC から OPI へ,標準リンク
MMC の CPU がレディ状態で,周期的に「レディ」信号を NCK に送ります。
1-3
ドライブレディ (DB10, DBX108.6)
接続ドライブすべてがレディ状態であることを,ドライブ が NCK を介して PLC
に伝えます。すべての軸およびスピンドルは,IS "Drive Ready"(ドライブレディ)
(DB31,...DBX93.5)(グループ信号)を示します。
NC レディ (DB10, DBX108.7)
制御システムがレディ状態です。
■ PLC へのアラーム信号 (DB10 and DB21, ... )
(注)下記に示したインタフェース信号の詳細について,DB10 に関
してはセクション 1.1.5 の「■ NC から PLC への信号 (DB10)」
を,DB21,... に関してはセクション 1.1.5 の「■チャンネル
からの信号」を参照してください。
MMC アラームがアクティブ (DB10, DBX103.0)
MMC が PLC にこの信号を送り,少なくとも 1 個の MMC アラーム(アラーム番号
100000 ~ 105999)がアクティブであることを知らせます。
周囲温度アラーム (DB10, DBX109.6)
周囲温度またはファン監視ファンクションが応答したことを意味します。
NCK バッテリアラーム (DB10, DBX109.7)
バッテリ電圧が下限値より降下したことを意味します。制御装置は操作可能です
が,電圧不足により揮発性メモリエリアのデータが失われる恐れがあります。
NCK アラームがアクティブ (DB10, DBX109.0)
制御装置が PLC にこの信号を送り,少なくとも 1 個の NCK アラームがアクティブ
であることを知らせます。どのチャンネルが関与しているか,また,これが処理
を停止させる原因となるかどうかを判断するために,チャンネル別インタフェー
スをスキャンすることができます。
チャンネル別 NCK アラームがアクティブ (DB21, ... DBX36.6)
制御システムが PLC にこの信号を送り,影響を受けるチャンネルに対して少なく
とも 1 個の NCK アラームがアクティブであることを知らせます。影響の程度を知
るために,現在実行中のプログラムが中断されるかまたは強制終了されるかを,
IS "NCK alarm with processing stop is active"(処理停止を伴う NCK アラームがアク
ティブ)から判断できます。
処理停止を伴う NCK アラームがアクティブ (DB21, ... DBX36.7)
制御装置が PLC にこの信号を送り,影響を受けるチャンネルに対して少なくとも 1
個の NCK アラームがアクティブであることを知らせます。このとき現在実行中のプ
ログラムはすでに中断されているか(処理停止),もしくは強制終了しています。
1-4
■ パスワードおよびキースイッチを介してのアクセス保護
アクセス許可
プログラム,データ,ファンクションへのアクセスは,ユーザが使用しやすいよう 8
段階の保護レベルで管理されており,次のように分類されます(表 1.1 を参照)。
• 当社,マシン製造業者,エンドユーザ用として,4 つのレベルのパスワード
• エンドユーザ用として,4 つのキースイッチ位置
これにより,アクセス権を管理する上で多重レベルの安全対策が行えます。
表 1.1 アクセス保護
保護レベル
タイプ
ユーザ
アクセス先(例)
0
パスワード
当社
すべてのファンクション,プログラム,データ
1
パスワード
マシン製造業者:
開発部門
限定されたファンクション,プログラム,デー
タ(例:入力オプション)
2
パスワード
マシン製造業者:
スタートアップエ
ンジニア
限定されたファンクション,プログラム,デー
タ(例:マシンデータのほぼすべて)
3
パスワード
エンドユーザ:
サービス
割当てられたファンクション,プログラム,
データ
4
キースイッ
チ位置 3
エンドユーザ:プ
ログラマ,セッ
ター
保護レベル 0 未満から 3 まで;マシン製造業者
またはエンドユーザが定義
5
キースイッ
チ位置 2
エンドユーザ:プ
ログラム操作をし
ない有資格ユーザ
保護レベル 0 未満から 3;エンドユーザが定義
6
キースイッ
チ位置 1
エンドユーザ:プ
ログラム操作をし
ない熟練ユーザ
例:プログラムの選択,ツールウェアデータ,
ゼロオフセット入力のみ可能
7
キースイッ
チ位置 0
エンドユーザ:準
熟練ユーザ
例:入力処理,プログラムの選択はできない。
マシン制御パネルの操作のみ可能
アクセス権の減少
アクセス機能
• 保護レベル 0 は最も数多くのアクセス権を提供し,保護レベル 7 は最も数少な
いアクセス権を提供します。
• 特定のアクセス権が特定の保護レベルに認められている場合,そのアクセス権
はその保護レベルより上位の保護レベルすべてに認められます。
• 特定の保護レベルに認められているアクセス権は,それより上位の保護レベル
からしか変更できません。
• 保護レベル 0 ~ 3 に対応するアクセス権は,常に当社が割当てを行い,変更す
ることはできません。
• キースイッチの現在位置を調べ,入力されたパスワードを比較することによ
り,アクセス権をセットすることができます。パスワードが入力されると,
キースイッチ位置のアクセス権が上書きされます。
• オプションは,個々の保護レベルで保護されますが,オプションデータの入力
が許されるのは,保護レベル 0 および 1 のみです。
• 保護レベル 4 ~ 7 に対応するアクセス権については,単なる提案にすぎませ
ん。工作機械製造業者またはエンドユーザで自由に変更することができます。
1-5
■ パスワード
パスワードの設定
使用可能な 4 つのレベルのパスワードとそれに対応するアクセス許可を利用する
には,SET PASSWORD ソフトキーを選択して DIAGNOSIS エリアにパスワードを
入力します。
参照: YS840DI
ユーザーズマニュアル・操作編
パスワードのリセット
パスワードは,DELETE PASSWORD ソフトキーを使って,アクセス権をキャンセ
ルしない限りは有効です。したがって,電源オン時にアクセス許可が自動的に削
除されることはありません。
使用できる文字
パスワードには,8 文字までの文字が使用できます。パスワードを定義する場合
は,操作パネル上で使用できる文字のみを使ってください。パスワードが 8 文字
に満たない場合は,不足の桁分はブランクと判断されます。
パスワードの初期値
保護レベル 1 ~ 3 のパスワードには,以下が初期値としてセットされています。
保護レベル 1 SUNRISE
保護レベル 2 EVENING
保護レベル 3 CUSTOMER
(注)これらのパスワードは,システムがスタートアップモードで
立ち上がったときに標準値として入力されます(NCK スター
トアップスイッチが位置 1 にある場合)。
アクセス保護が保証されるように,パスワードは変更してく
ださい。
■ キースイッチ位置 (DB10, DBX56.4 ~ 7)
キースイッチ
YS840DI のキースイッチは,4 ~ 7 が割当てられている保護レベルに対して,4 つ
の設定があります。キースイッチには,色の異なるキーが 3 個あり,様々な位置
への設定あるいは解除ができます(表 1.2 を参照)。それぞれのキー位置には,工
作機械製造業者やユーザによるファンクションの割当てが可能です。プログラム,
データおよびファンクションに対してユーザ向けのアクセスが,MMC マシンデー
タの中で設定できます(1.1.2 の「■保護レベルに使用する MMC マシンデータ」
を参照)。
キースイッチ位置は,PLC インタフェース (IS "Keyswitch position 0 to 3")
(DB10,SBX56.4 to 7) に送られて,PLC ユーザプログラムがそれを評価します。キー
スイッチ位置 0 はアクセス権最小を,位置 3 はアクセス権最大を意味します。た
とえば,キースイッチ位置が 0,1,または 2 で変更できるデータはすべて,キー
スイッチ位置 3 でも変更可能です。
1-6
キースイッチのアプリケーション
特定のデータエリアへのアクセスは,キースイッチでディスエーブルできます。
こうすることにより,オペレータが誤ってジオメトリデータ(ゼロオフセットな
ど)を変更したり,プログラム制御ファンクションを起動したりすること(ドラ
イランフィードレートの選択など)がなくなります。
表 1.2 0 ~ 3 のキースイッチ設定
ロック位置
キースイッチ位置
DB10, DBB56
保護レベル
ビット 4
位置 0
位置 1
0 または 1
黒色のキースイッ
位置 2
0 または 1 または
2 緑色のキース
イッチ
位置 3
0 または 1 または 2
または 3 赤色のキー
スイッチ
ビット 5
ビット 6
ビット 7
PLC ユーザプログラムへの影響
PLC インタフェース信号 "Keyswitch position 0 to 3" は,直接,マシン制御パネル上
のキースイッチを使って,あるいは PLC ユーザプログラムから定義することがで
きます。セットできるインタフェース信号は 1 つだけです。同時に複数のインタ
フェース信号をセットすると,制御装置はキースイッチ位置を 3 にセットします。
補足情報
1.1.5「 信号の説明」を参照してください。
■ 保護レベルに使用する MMC マシンデータ
ロック可能なデータエリア
マシン製造業者やエンドユーザは,MMC マシンデータを使って,個々のファンク
ションおよびデータエリアに必要な保護レベルを割当てることができます。いく
つかのデータタイプを読取りまたは書込みでアクセスするために,様々な保護レ
ベルが定義できます。
保護レベルに関する最も重要な MMC マシンデータの一覧を以下に示します。
MMC マシンデータ
アクセス先
USER_CLASS_READ_TOA
すべてのツールオフセットを読取る
USER_CLASS_WRITE_TOA
すべてのツールオフセットを書込む
1-7
MMC マシンデータ
アクセス先
USER_CLASS_WRITE_TOA_GEO
ツールジオメトリを書込む(タイプおよ
びカッティングエッジを含む)
USER_CLASS_WRITE_TOA_WEAR
ツールウェアを書込む(リミット値を除
く)
USER_CLASS_WRITE_TOA_ADAPT
ツールアダプタージオメトリ値を書込む
USER_CLASS_WRITE_ZOA
設定可能なゼロオフセットを書込む
USER_CLASS_READ_GUD_LUD
ユーザ変数を読取る
USER_CLASS_WRITE_GUD_LUD
ユーザ変数を書込む
USER_CLASS_OVERSTORE_HIGH
拡張オーバストアがイネーブル
USER_CLASS_WRITE_PRG_CONDIT
プログラム変更をイネーブルにする
USER_CLASS_DRF_INPUT
DRF オフセットを入力する
USER_CLASS_WRITE_SEA
設定データを書込む
USER_CLASS_READ_PROGRAM
パートプログラムを読取る
USER_CLASS_WRITE_PROGRAM
パートプログラムを書込む/編集する
USER_CLASS_SELECT_PROGRAM
プログラム選択をイネーブルにする
USER_CLASS_TEACH_IN
TEACH IN をイネーブルにする
USER_CLASS_PRESET
PRESET をイネーブルにする
USER_CLASS_CLEAR_RPA
R パラメータをすべて削除する
USER_CLASS_WRITE_RPA
R パラメータを書込む
初期設定
標準インストレーション時,MMC マシンデータはあらかじめ保護レベル 7 に設定
されています。すなわち,これらのデータエリアおよびファンクションは,キー
スイッチ位置が 0 の時にも影響を受けることを意味します。
マシン製造業者やエンドユーザは,必要に応じてこれらの保護レベルを変更する
ことができます。保護レベル 0 ~ 3 も入力可能です。
■ ツールジオメトリおよび磨耗制限入力
保護レベル
1.1.2 の「■保護レベルに使用する MMC マシンデータ」に示した保護レベルは次
のように使用してください。
MD 9201: USER_CLASS_WRITE_TOA_GEO = 5
MD 9202: USER_CLASS_WRITE_TOA_WEAR = 6
ツールジオメトリ入力は,磨耗入力より上位のアクセス権を必要とすることを意
味します。
この例では,磨耗を入力する人は,少なくとも保護レベル 6 を有していなければ
なりません。
磨耗制限入力
古い磨耗値と新しい磨耗値の差が,MD 9450: MM_WRITE_TOA_FINE_LIMIT の値
を超えてはなりません。
1-8
■ 操作パネルで使用するインタフェース信号 (DB19)
操作パネル禁止 (DB19, DBX0.0)
IS "Operator panel inhibit" = 1 で,操作パネル全体がディスエーブルになります。
画面を暗くする (DB19, DBX0.1)
画面を暗く,または明るくします(画面を保護する目的など)
• キーボードで指定する ("automatic screen darkening"(画面自動暗転))
MMC-MD 9006 で設定した時間内にキーを押さなかった場合,画面は自動的に
暗くなります。操作パネルの任意のキーを押すと,再び画面は明るくなります
(最初のこのキーストロークで他のオペレータアクションがトリガされること
はありません)。自動的に画面を暗くするためには,あらかじめ次の条件が必
要です。
- IS "Darken screen" = 0
- MMC-MD 9006: DISPLAY_BLACK_TIME > 0
• IS "Darken screen" (画面暗転)を使用して PLC ユーザプログラムから指定する
直接 PLC から IS "Darken screen" を使って,画面を暗くしたり(信号 1),明る
くしたり(信号 0)することができます。
IS "Darken screen" が "1" にセットされると同時に,次の状態になります。
- キーボードによって画面を明るくすることは不可能になります(上記を参
照)
。
- 操作パネルからの最初のキーストロークが,オペレータアクションをトリガ
する状態になります。
(注)IS "Darken screen" を使用して画面を暗くした場合には,オペ
レータが誤ってキーボードコマンドを入力することのないよ
うに,IS "Key disable"(キーディスエーブル)= 1 により,
キーボードも使用できないようにしてください。
キーディスエーブル (DB19, DBX0.2)
IS "Key disable"(キーディスエーブル)を使用して,接続しているキーボードを
ディスエーブル(信号 1)またはイネーブル(信号 0)にすることができます
(1.1.5 の「■操作パネルとの間の信号」を参照)
。
WCS(ワーク座標系)の実際値 (DB19, DBX0.7)
実際値は,2 つの異なる座標系をもとに表示されます。
• 機械座標系 (MCS)
機械座標系は,マシン軸の関係を定義します。MCS では,マシン軸および特
殊軸がすべて表示されます。
• ワーク座標系 (WCS)
特別変換(フレーム定義,ゼロオフセット)を使用して,ワークとマシン軸間
の割当てを行います。ワークは常に直交座標系で表現されます。WCS では,
ジオメトリ軸および特殊軸がすべて表示されます。
1-9
実際値表示の選択
表示したい座標系を選択することができます。
• オペレータが,ソフトキー "Actual values MCS" または "Actual values WCS" で指
定する。
参照: YS840DI ユーザーズマニュアル・操作編
• IS "Actual value in WCS"(WCS での実際値)を使って PLC から指定する。
PLC で IS "Actual value in WCS" が "1" にセットされた場合,マシンエリアを選
択すると常に,ワーク座標系 (WCS) の実際値が表示されます。マシンエリア
内で,オペレータは実際値の表示を WCS と MCS の間で切換えることができ
ます。
WCS での実際値
"WCS" を選択すると,実際の位置を表すジオメトリ軸,特殊軸,および移動距離
がワーク座標系内の "Position" ウィンドウに表示されます。
MCS での実際値
"MCS" を選択すると,実施の位置を表すジオメトリ軸,特殊軸,および移動距離
がマシン座標系内の "Position" ウィンドウに表示されます(1.1.5 の「■操作パネル
との間の信号」を参照)。
■ チャンネルとの間のインタフェース信号 (DB21, ... )
■ チャンネルへのインタフェース信号
Delete distance-to-go (channel-specific)(移動距離削除(チャンネル
別))(DB21-28, DBX6.2)
IS "Delete distance-to-go"(移動距離削除)
(チャンネル別)はパス軸だけに適用さ
れます。
このインタフェース信号が発生すると同時に,ジオメトリグループ内にあるすべ
ての軸の移動距離が削除されるため,各軸はランプに沿って減速し停止します。
その後,次のプログラムブロックが開始されます。
詳細については,1.1.5 の「■ チャンネルへの信号」を参照してください。
■ 軸/スピンドルからのインタフェース信号 (DB31, ... )
■ 軸/スピンドルへのインタフェース信号
軸/スピンドルディスエーブル (DB31, ... DBX1.3)
軸ディスエーブルファンクション
IS "Axis/spindle disable"(軸/スピンドルディスエーブル)がセットされると,位
置セットポイントが一定に保たれ,軸移動はディスエーブルになります。移動ブ
ロックが終わる前にこの信号が短時間出された場合でも,残りのブロックを処理
しないまま停止します。ディスエーブル状態がキャンセルされた場合,次の軸移
動ブロックまで,動作は停止したままになります。前のブロックで処理されな
かった距離は,次の動作が始まると新しいブロック内でトラバースされます。
1-10
(注)前のブロックで残った距離が原因で,位置決めエラーや輪郭
エラーを引き起こさないよう注意してください。
スピンドルディスエーブルファンクション
IS "Spindle disable"(スピンドルディスエーブル)がセットされると,速度セット
ポイント "0" が,開ループ制御モードまたは位置決めモードの関連スピンドルを制
御する速度コントローラに出力されます。
「軸ディスエーブル」状態同様,位置
セットポイントが一定に保たれるため,スピンドルの動作はディスエーブルにな
ります。
詳細については,1.1.5 の「■軸 / スピンドルへの信号」を参照してください。
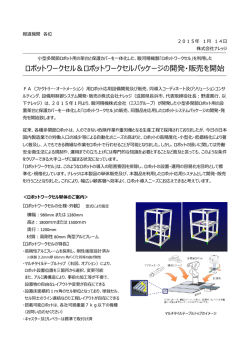
フォローアップモード (DB31, ... DBX1.4)
フォローアップモードで動作している軸/スピンドルがある場合,そのセットポ
イント位置は現在の機械位置をトレースします。図 1.1 のように,フォローアップ
モードでの位置セットポイントは,実際の機械位置から得られます。
フォローアップモードで操作中は,ゼロ速度制御,クランピング,および位置監
視はアクティブにはできません。
働き
IS "Follow-up mode"(フォローアップモード)は,ドライブサーボイネーブルが解
除されている場合にのみ意味があります(IS "Servo enable"(サーボイネーブル)=
0 に設定されている場合,制御装置に障害が発生した場合,あるいはサーボイネー
ブルが再度発行されようとしている場合など)。
• IS "Follow-up mode" = 1(フォローアップ;図 1.3 を参照)
「サーボイネーブル」が解除されると,関連する軸の位置セットポイントは機
械位置に合うよう補正され続けます。この状態は,IS "Follow-up mode active"
(フォローアップモードアクティブ)(DB31, ... DBX61.3) = "1" で PLC へ伝えら
れます。「サーボイネーブル」が再びイネーブルになると,パートプログラム
がアクティブであれば最後にプログラムされた位置へ向けて,制御装置内部の
再度位置決めオペレーションが動作し始めます(REPOSA:すべての軸をとも
なう直線アプローチ)。アクティブなパートプログラムがなければ,それ以降
の軸の動作は,(おそらくは変更された)新しい機械位置から開始されます。
クランピングやゼロ速度監視は,アクティブではありません。
• IS "Follow-up mode" = 0(ホールド;図 1.2 を参照)
「サーボイネーブル」が解除されると,古い位置セットポイントがそのまま有効
となります。軸が位置ずれになると,位置セットポイントと機械位置との間に追
従誤差が生じますが,
「サーボイネーブル」がセットされた時点で修正されます。
それ以降の軸の動作は,
「サーボイネーブル」が解除される前に設定されていた
セットポイント位置から開始します。"Hold" 状態の間に,IS "Follow-up mode
active"(フォローアップモードアクティブ)はリセットされます。
クランピングやゼロ速度監視は,アクティブのままです。
IS "Servo enable"(サーボイネーブル)(DB31, ... DBX2.1) がセット(信号 "1")され
ている限り,IS "Follow-up mode"(フォローアップモード)(DB31, ... DBX1.4) は無
効です。
1-11
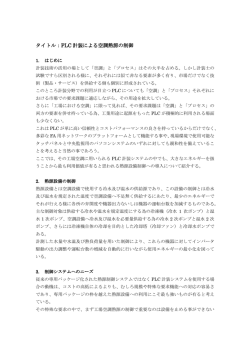
例:軸のクランピング
以下に例をあげて,
「サーボイネーブル」がセットされた場合の軸/スピンドルの
位置決め挙動を説明します(図 1.2,1.3 を参照)
。
機械的または電気的な影響を受けて,Y 軸が実際の位置
Y1 からクランプ位置 Yk へ位置ずれを起こすと,Y 軸に対する「サーボイネーブ
ル」がまず解除されます。
ホールド
IS "Servo enable"(サーボイネーブル)がセットされると,IS "Follow-up mode"
(フォローアップモード)が "0" に切替わります(図 1.2 を参照)
。
(IS "Servo enable"(サーボイネーブル)のセットによって)) 閉ループ制御が再び
アクティブになると,セットポイント位置が機械位置に合うよう修正されていな
いため,軸は直ちに「古い」セットポイント位置 Y1 へ再びアプローチします(図
1.2)。次にトラバースブロックで,パートプログラムで定義されたとおりのパス輪
郭で移動します(これは大きな利点です)。
注意:
古いセットポイント位置への戻り動作は,
(加速特性とは無関係に)位置コ
ントローラが直接行うため,距離の程度によっては機械的なシステムに負荷
がかかる場合があります。
(注)
クランプ処理中にアラーム 25040 "Zero speed monitoring"(ゼロ速度監視)が
でないようにするため,クランプ監視ファンクションで IS "Clamping in
progress"(クランプ処理中)(DB31, ... DBX2.3) に置換えてください。
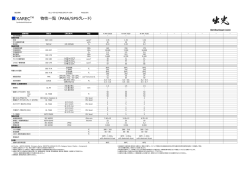
フォローアップ
IS "Servo enable"(サーボイネーブル)がセットされると,IS "Follow-up mode"
(フォローアップモード)は "1" に切替わります(図 1.3 を参照)
閉ループ制御系が再びアクティブになると,パートプログラムがアクティブであ
れば最後にプログラムされた位置へ向けて,制御装置内部の再度位置決めオペ
レーション(REPOSA:すべての軸を伴う直線アプローチ)が実行されます。
1-12
IPO からの位置セットポイント
位置
コントローラ
サーボイネーブ
ルキャンセル
セットポイント
フォローアップ
位置の実際値
図 1.1 「サーボイネーブル」および「フォローアップモード」がキャンセルされた
後の状態
シーケンス
1. IS "Follow-up mode" = 0
2. IS "Servo enable"(サーボイネーブル)解除
3. クランピング
4. クランプ解除
5. IS "Servo enable"(サーボイネーブル)セット
サーボイネーブルがセットさ
れている場合,クランピング
前の位置 (Y1) へ(位置コント
ローラにより)戻る。
クランピングによる
位置シフト
図 1.2 「フォローアップ」(ホールド)なしのクランピングによるパス
シーケンス
1. IS "Follow-up mode" = 1
2. IS "Servo enable"(サーボイネーブル)解除
3. クランピング
4. クランプ解除
5. IS "Servo enable"(サーボイネーブル)セット
パートプログラムがアクティブではない場合のパス
X の み が N50 で プ ロ グ ラ ム さ れ て い て,
パートプログラムがアクティブである場合
のパス
自動モードでパートプログラムが
アクティブであれば,REPOSA によ
り戻る
軸動作はプログラム位置 (Y1) よ
り開始
クランピングによる
位置シフト
図 1.3 「フォローアップ」付きのクランピングによるパス
1-13
アナログドライブへの応用例(FM-NC のみ)
アナログドライブでは,外部セットポイントを用いて軸を定期的に移動させるこ
とができます。IS "Follow-up mode"(フォローアップモード)がすでにセットされ
ていれば,軸は実際の機械位置を捕らえ続けるため,そのあとの原点復帰動作は
必要ありません。
次の手順を推奨します。
1. 前の,あるいは同じ PLC サイクル内で,IS "Follow-up mode" を "1" にセットして
いる状態で,インタフェースに指定されている IS "Servo enable" (DB31, ... DBX2.1)
をキャンセルします。
⇒ 軸/スピンドルは,フォローアップモードで動作します。
2. 外部サーボイネーブル,外部速度セットポイントを指定します。
⇒外部セットポイントへの軸/スピンドルトラバース加速
⇒ NC は実際の位置の値を捕らえ続け,セットポイントを実際の機械位置に合わ
せて補正します。
3. サーボイネーブル,外部速度セットポイントをキャンセルします。
⇒ 軸/スピンドルは停止
4. インタフェースで IS "Servo enable” セットします。
⇒ NC が実際値の位置と同期をとり,次の移動動作はこの位置から始まります。
(注)IS "Servo enable" と併用した場合にのみ意味があるので,IS
"Follow-up mode" をキャンセルする必要はありません。
フォローアップモードをキャンセルする
「サーボイネーブル」がキャンセルされていて,フォローアップモードで軸測定系
の最大許容リミット周波数を超過していなければ,軸を新しい実際値と同期させ
る必要はありません。制御システムがインタフェース信号 "Referenced/
Synchronized"(原点復帰完了/同期化)(DB31, ... DBX60.4 and 60.5) を "0" にセッ
トし,関連する軸に対してアラーム 21610 "Encoder frequency exceeded"(エンコー
ダ周波数超過)を起動することにより,自動的にこのエラーを検知します。
(注)アクティブ変換処理内(TRANS-MIT など)で,ある軸のフォ
ローアップを停止させると,REPOS 動作は別の軸,または変
換に関わる軸で始動します。
監視
フォローアップモードで動作する軸/スピンドルがある場合,次の監視タイプは
アクティブでなくなります。
• ゼロ速度監視
• クランピング監視
• 位置決め監視
また,インタフェース信号 "Position reached with exact stop fine" (DB31, ... DBX60.7)
および "Position reached with exact stop coarse" (DB31, ... DBX60.6) は "0" にセットさ
れます。
1-14
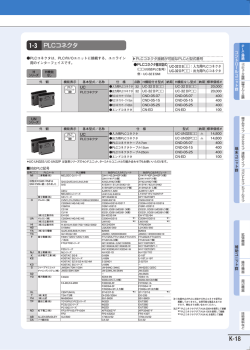
エンコーダ 1 (DB31, ... DBX1.5)
軸/スピンドルあたり最大 2 つのエンコーダを接続できます。アクティブなエン
コーダ(図 1.4 を参照)は常に,位置制御,絶対値の計算,および位置表示に使用
されます。
エンコーダ 2 (DB31, ... DBX1.6)
インタフェース信号 "Position measuring system 1/2"(エンコーダ 1/2)および "Servo
enable"(サーボイネーブル)(DB31, ... DBX2.1) をうまく切換えることにより,次の
処理が可能になります。
• エンコーダ 1 または 2 の起動
• エンコーダ 1 および 2 の切換え
• パーキング位置;この場合,エンコーダ 1,2 がともに停止状態で,IS "Servo
enable" が信号 0 にセットされる。
• エンコーダのないスピンドル(速度制御されたスピンドル);この場合,エン
コーダ 1,2 がともに停止状態で,IS "Servo enable" が信号 1 にセットされる。
インタフェース信号について可能な切換え操作を以下の表に示します。
IS "PMS 1"
(DB31, ... DBX1.5)
IS "PMS 2"
(DB31, ... DBX1.6)
IS "Servo enable"
(DB31, ... DBX2.1)
1
0 ( または 1)
1
0
1
1
パーキング位置
0
0
0
エンコーダの影響を
0
0
1
PMS1 から PMS2 への
切換え
1⇒0
0⇒1
1
PMS2 から PMS1 への
切換え
0⇒1
1⇒0
1
意味
エンコーダ 1 が
アクティブ
エンコーダ 2 が
アクティブ
受けない
(速度制御された)
スピンドル
アプリケーション
いくつかの軸に関しては,別置エンコーダ(加工テーブルに直接設置)とモータ
エンコーダ(ドライブ設置)を両方使用できるよう接続しておくのが実用的です。
通常はモータエンコーダを使用しますが,非常に精度の高い加工が要求される場
合には,別置エンコーダが有効です。エンコーダを選択するには,インタフェー
ス信号「Position Measuring 1」および「Position Measuring 2」を設定します。
エンコーダを切換える
参照: 1.8 「位置指令単位と検出単位」(G2)
1-15
補間器からの位置セットポイント
位置
コントローラ
モータ
速度
コントローラ
電流
エンコーダ
1
エンコーダ
2
1:PM1
2:PM2
3:パーキング軸
図 1.4 エンコーダ 1 および 2
(注)1.1.5 の「■ 軸 / スピンドルへの信号」および次を参照してくださ
い。
参照: 1.8 位置指令単位と検出単位 (G2)
サーボイネーブル (DB31, ... DBX2.1)
ドライブに対してサーボイネーブルがアクティブになると,軸/スピンドルの位
置制御ループが閉じ,それ以後は位置制御装置が,軸/スピンドルを制御します。
サーボイネーブルが解除されると,位置制御ループが開き,少し遅れて軸/スピ
ンドルの速度制御ループも開きます。
起動方法
ドライブに対するサーボイネーブルは,以下の場所からセット,解除できます。
1. PLC ユーザプログラムのインタフェース信号「サーボイネーブル」を使用する
方法(通常の場合)
効力:軸/スピンドルをクランプする前に,サーボイネーブルが解除されます。
2. マシン,ドライブ,位置測定系または制御装置に何らかの障害が発生すると,
制御装置が自動的にサーボイネーブルをセットします(障害発生の場合)
。
効力:障害の発生により,移動中の軸は急停止します。
障害(アラーム)に起因するサーボイネーブルの内部的なキャンセル処理の詳細
については,次を参照してください。
参照: アラーム一覧
3. 以下のイベントが発生した場合は,制御装置がセット,解除を指定します。
• PLC インタフェースで "EMERGENCY OFF"(緊急状態オフ)(DB10, DBX56.1)
がアクティブになった場合。
• ドライブに対するパルスイネーブルがキャンセルされた場合 (IS "Pulse enable"
(パルスイネーブル))(DB31, ... DBX21.7 など)。
• ドライブがレディ状態にない場合(IS "Drive Ready"(ドライブレディ)(DB31,
... DBX93.5) = 0)。
1-16
サーボイネーブルのキャンセル
サーボイネーブルがキャンセルされた場合,オペレーションの制御装置内部シー
ケンスは,キャンセル時の軸の状態(動作中か停止中か)に左右されます。
以下に実施可能な手順を示します(図 1.5 を参照)。
... 軸/スピンドルが停止している場合
停止中の軸/スピンドルに対してサーボイネーブルがキャンセルされた場合のオ
ペレーションシーケンス
• 軸の位置制御ループが開きます(図 1.5 を参照)
。
⇒ IS "Position controller active" (DB31, ... DBX61.5) が "0" ステータスにセット
(チェックバック)。
• 軸/スピンドルは「ホールド」または「フォローアップモード」のいずれかに
(IS "Follow-up mode"(フォローアップモード)(DB31, ... DBX1.4) によって)切
り換ります。
... 軸/スピンドルが動作中の場合
動作中の軸/スピンドルに対してサーボイネーブルがキャンセルされた場合のオ
ペレーションシーケンス
• 軸/スピンドルは,MD 36610: AX_EMERGENCY_STOP_TIME(エラー状態で
のブレーキングランプ継続時間)の設定にしたがって急停止がかかり,速度が
抑制されます。その後,アラーム 21612 "Servo enable reset during movement"
(動作中のサーボイネーブルリセット)が出力されます(図 1.5 を参照)。
• 軸/スピンドルの位置制御ループが開きます。IS "Position controller"(位置コン
トローラ)(DB31, ... DBX61.5) が "0" ステータスにセットされて PLC にチェッ
クバックします。また,サーボイネーブル遅延時間用のタイマー (MD 36620:
SERVO_DISABLE_DELAY_TIME(出力遅れサーボイネーブル)
)もトリガさ
れます。
• 実際の速度が停止範囲に達すると同時に,ドライブのサーボイネーブルが解除
されます。IS "Speed controller active"(速度コントローラアクティブ)(DB31, ...
DBX61.6) が "0" ステータスにセットされて PLC にチェックバックします。ド
ライブに対するサーボイネーブルは,MD 36620:
SERVO_DISABLE_DELAY_TIME で設定された時間が経過するとキャンセルさ
れます。
注意:
カットアウト遅延の設定が小さすぎる場合,軸/スピンドルが動作中であっても
サーボイネーブルは解除されます。その後,軸/スピンドルはセットポイント 0
で急停止します。
• 軸/スピンドルの実際値の位置を制御装置が捕らえ続けます。
• ブレーキ処理の終了時,軸/スピンドルは,IS "Follow-up mode"(フォローアップ
モード)(DB31,...DBX1.4) のステータスとは無関係に「フォローアップモード」に
切替わります。それに伴いゼロ速度監視,クランプ監視は無効となります。
軸/スピンドルのこのステータスは(サーボイネーブルがまだアクティブでない
場合),「リセット」されるまで変更できません。
「リセット」により,軸/スピン
ドルは「ホールド」または「フォローアップ」状態(インタフェース信号「フォ
ローアップモード」の設定によりどちらか)になります。
1-17
位置コントローラが即座に開になる
軸のトラバース処理
急停止(位置制御ループ
が開いた状態で)
IS "Servo disable"
IS "Position controller active"
ドライブに対するサーボイネーブル
(IS "Speed controller active"(速度コントロー
ラアクティブ))
図 1.5 軸/スピンドルが動作中に,インタフェースから「サーボイネーブル解除」
が指示された場合
補間軸グループ
どれか 1 つの軸に対するサーボイネーブル信号がキャンセルされると同時に,移
動する補間軸グループの軸はすべて停止します。
前述したように,軸は停止します。ジオメトリグループに含まれる軸はすべて急
停止し,同時にアラーム 21612 "Servo enable reset during movement"(動作中のサー
ボイネーブルリセット)もトリガされます。このイベントが発生すると,NC プロ
グラム処理の続行は不可能となります。
IS "Follow-up mode" との関連
IS "Servo enable" (DB31, ... DBX2.1) がセットされたときの軸/スピンドルの位置決
め応答は,IS "Follow-up mode active"(フォローアップモードアクティブ)のス
テータスによって決まります。また,ゼロ速度監視,クランプ監視の両ファンク
ションも,IS "Follow-up mode active"(フォローアップモードアクティブ)(DB31, ...
DBX61.3) = 1 の場合は無効です。.
実際値の同期化
サーボイネーブルが指定された後,この時間内に指令位置とエンコーダからの
フィードバック位置の最大許容リミットを超えていなければ,新たな実際の機械
ポジションに対して軸を同期する(基準点アプローチ)必要はありません。
1-18
移動距離を削除する(軸/スピンドル別)(DB31, ... DBX2.2)
IS "Delete distance-to-go(軸別)は,ジオメトリグループに割当てられない軸(位置
決め軸)に対してのみ,AUTOMATIC および MDA モードでアクティブになります。
移動距離を削除する
IS "Delete distance-to-go(軸別)は,ジオメトリグループに割当てられない軸(位置
決め軸)に対してのみ,AUTOMATIC および MDA モードでアクティブになります。
インタフェース信号が送られると同時に,軸は減速停止し,移動距離は削除され
ます。その後,次のプログラムブロックが開始されます。
詳細については,1.1.5 の「■軸 / スピンドルへの信号」を参照してください。
スピンドルリセット
参照: 1.17 主軸機能 (S1)
コントローラパラメータセットの選択 (DB31, ...DBX9.0, 1, 2)
PLC ユーザプログラムには,コントローラのパラメータセット用に 2 進化された
数字(0 ~ 2 ビット)が保存されています。これは,NC が軸に対して起動します。
パラメータセットは最大 6 個まで使用できます。各パラメータセットには,次の
マシンデータが含まれます。
MD 番号
MD 識別子
36200
$MA_AX_VELO_LIMIT
32200
$MA_POSCTRL_GAIN
32800
$MA_EQUIV_CURRCTRL_TIME
32810
$MA_EQUIV_SPEEDCTRL_TIME
32910
$MA_DYN_MATCH_TIME
31050
$MA_DRIVE_AX_RATIO_DENOM
31060
$MA_DRIVE_AX_RATIO_NUMERA
パラメータセットは,以下によって割当てられます。
• パートプログラム
• オペレータのアクション
例については 1.1.6 を参照してください。
以下に割当てを示します。
パラメータセット
選択用のインデックスまたはバイナリ値
1
0
2
1
3
2
4
3
5
4
6
5...7
NC は,軸別 MD 35590: $MA_PARAMSET_CHANGE_ENABLE = 1 or = 2 の全体切
換えイネーブルがアクティブの場合にのみ , パラメータセットを切換えます。
1-19
制限事項
スピンドル用の MD 35590:PARAMSET_CHANGE_ENABLE = 1 は影響しません。
優先処理
PARAMSET_CHANGE_ENABLE = 1 では
リジッドタッピング,ねじ切り中は,PLC からパラメータ変更要求があっても切
換わりません。
PARAMSET_CHANGE_ENABLE = 2 では制限事項も優先処理もありません。
軸が動作中である場合の切換え要求
切換え応答は,新パラメータセットと旧パラメータセット間のサーボゲイン MD
32200: $MA_POSCTRL_GAIN に対する変更によって異なります。
• 係数 Kv が等しいか,または位置制御が無効である:
NC は,PLC の切換え要求に対して即座に応答します。この間にパラメータ
セットは変更されます。
• 係数 Kv が等しくなく,位置制御がアクティブである:
切換えをスムーズに行うために,軸またはパスが減速して「軸/スピンドル停
止」信号を検知してから切換えが行われます。切換え速度値は,アプリケー
ションに応じて $MA_STANDSTILL_VELO_TOL (MD 36060) で変更できます。
(注)特殊なアプリケーションには,付加的な処置が必要となるこ
とがあります。該当のアプリケーションに合わせて PLC のプ
ログラムに必要な処置を導入してください。
PLC への切換え要求情報
PLC アプリケーションプログラムは,PLC への補助機能出力の形式で,切換え要求
をパートプログラムから直接受け取ることができます。補助機能出力は,次のよ
うに記述されます。
参照: 1.9 補助機能出力 (H2)
コントローラパラメータの切換えのための同じ補助機能の値が,パートプログラ
ムとユーザ PLC プログラムの両方にセットされなければなりません。
(注)補助機能出力を使用して,コントローラパラメータセット切
換えファンクションが組み込まれた場合,パートプログラム
は補助機能の値の変換ベースで実行され,関連する PLC プロ
グラムによって処理されます。
■ 軸/スピンドルからのインタフェース信号
(注)以下に示すインタフェース信号の詳細については,1.1.5 の
「■軸 / スピンドルからの信号」を参照してください。
1-20
フォローアップモードアクティブ (DB31, ... DBX61.3)
軸/スピンドルは,フォローアップモードで動作します。実際の機械位置に合う
ようセットポイント位置を補正し続けます。
クランピング,ゼロ速度監視ファンクションは動作しません。
軸/スピンドル停止 (DB31, ... DBX61.4)
"Axis/spindle stationary" 信号は,以下の場合にコントローラによりイネーブルにな
ります。
- NC から出力される新しいセットポイントが存在せず,かつ
- 軸が指定された速度公差内にあることを NC が検知した場合。
公差は MD 36060 にセットされています。STANDSTILL_VELO_TOL(
「軸/スピン
ドル停止」信号の最大速度)
位置コントローラアクティブ (DB31, ... DBX61.5)
軸/スピンドルの位置制御ループが閉じています;位置制御ファンクションはア
クティブです。
速度コントローラアクティブ (DB31, ... DBX61.6)
軸/スピンドルの速度制御ループが閉じています;速度制御ファンクションはア
クティブです。
電流のコントローラアクティブ (DB31, ... DBX61.7)
軸/スピンドルのカレントの制御ループが閉じています;電流制御ファンクショ
ンはアクティブです。
1-21
コントローラパラメータセットチェックバック (DB31, ... DBX69.0, 1, 2)
この信号は,コントローラパラメータセットの切換え要求 (DB31, ...DBX9.0, 1, 2)
と対応しており,マシン軸上で選択されたパラメータセットの 2 進化されたイン
デックスを表しています。
パラメータセット
インタフェースでのインデックスまたはバイナリ値
1
0
2
1
3
2
4
3
5
4
6
5
チェックバック信号に,要求信号と同じ値が含まれていれば,切換えがうまく
いったことが確認されます。アクティブなコントローラパラメータセットのイン
デックスは,常に値が指定されます。
Lubrication pulse(潤滑パルス)(DB31, ... DBX76.0)
軸/スピンドルが,MD 33050 でセットした距離より大きく移動した場合,即座に
NCK は IS "Lubrication pulse"(潤滑パルス)を反転させます。
LUBRICATION_DIST(PLC からの潤滑用トラベルパス)
■ デジタルドライブ用のインタフェース信号 (DB31, ... )
(注)以下に示すインタフェース信号についての詳細は,1.1.5 の
「■軸 / スピンドルへの信号」を参照してください。
■ 軸/スピンドルへの信号
Ramp-function generator rapid stop(ランプファンクション発生器急
停止)(DB31, ... DBX20.1)
PLC ユーザプログラムがドライブに対して "rapid stop"(急停止)を要求します。
このときドライブは(速度セットポイントを 0 にする)減速ファンクションを使
用することなく停止します。サーボイネーブルは有効のままです。
810D にはありません。
Torque limit 2(トルクリミット 2)(DB31, ... DBX20.2)
PLC ユーザプログラムは,軸/スピンドルに対してトルクリミット 2 を要求しま
す。リミット値はドライブパラメータを使ってセットします。
810D にはありません。
Speed setpoint smoothing(速度セットポイント平滑化)(DB31, ...
DBX20.3)
PLC ユーザプログラムは,軸/スピンドルに対して速度セットポイント平滑化
フィルタを要求します。平滑化は,特定の条件下でのみドライブモジュール内で
アクティブになります。
810D にはありません。
1-22
Drive parameter set selection A, B, C(ドライブパラメータセット選
択 A,B,C)(DB31, ... DBX21.0, 1, 2)
PLC ユーザプログラムは,ビットコンビネーション A,B,C を使用して,
SIMODRIVE 611D 上の異なるドライブパラメータセットを最大 8 個まで選択する
ことができます。
Motor selection A, B(モータ選択 A,B)(DB31, ... DBX21.3, 4)
PLC ユーザプログラムは,MSD ドライブモジュールごとに,モータタイプまたは
モータの操作モードを 4 種類の中から選択することができます。その時点で,メ
インスピンドルドライブをスターオペレーション (A=0, B=0),またはデルタオペ
レーション (A=1, B=0) のどちらで動作させるか選択できます。
810D にはありません。
Motor selected(モータ選択)(DB31, ... DBX21.5)
PLC ユーザプログラムは,モータが正しく選択されたことを示すためにドライブ
にこの信号を送ります。たとえば,スター/デルタオペレーションの切換えの際,
モータコンタクタが操作されたときには SIMODRIVE 611D が通知されるはずで
す。それを受けてドライブはパルスをイネーブルにします。
810D にはありません。
Speed controller integrator disable(速度コントローラ積分器ディス
エーブル)(DB31, ... DBX21.6)
PLC ユーザプログラムは,ドライブの速度コントローラ積分器を抑制します。こ
れを受けて速度コントローラは,PI から P コントローラへ切替わります。
810D にはありません。
Pulse enable(パルスイネーブル)(DB31, ... DBX21.7)
PLC ユーザプログラムは,軸/スピンドルに対するパルスをイネーブルにします。
ただしパルスイネーブルは,すべてのイネーブル信号が出ている場合にドライブ
モジュールに対してのみアクティブになります。
■ 軸/スピンドルからの信号
(注)以下に示すインタフェース信号についての詳細は,1.1.5 の
「■軸 / スピンドルからの信号」を参照してください。
1-23
Setup mode active(セットアップモードアクティブ)(DB31, ...
DBX92.0)
ドライブに対してセットアップモードがアクティブになります。セットアップ
モードは,インフィード/再生フィードバックモジュールの端子を介して選択さ
れます。
Ramp-function generator rapid stop active(減速停止ファンクション
発生器急停止アクティブ)(DB31, ... DBX92.1)
ランプファンクション発生器急停止がアクティブになったことを PLC に返すドラ
イブ信号です。これによりドライブは減速ファンクション(速度セットポイント
を 0 にセットする)を使用せずに停止します。
810D にはありません。
Torque limit 2 active(トルクリミット 2 アクティブ)(DB31, ...
DBX92.2)
軸/スピンドルに対してトルクリミット 2 がアクティブになったことを,ドライ
ブが PLC に返す信号です。トルクリミット値は,ドライブパラメータを使用して
定義します。
810D にはありません。
Speed setpoint smoothing active(速度セットポイント平滑化アク
ティブ)(DB31, ... DBX92.3)
PLC ユーザプログラムは,軸/スピンドルに速度セットポイント平滑化フィルタ
を要求します。平滑化は,特定の条件下でのみドライブモジュール内でアクティ
ブになります。
810D にはありません。
Active drive parameter set A, B, C(アクティブドライブパラメータ
セット A,B,C)(DB31, ... DBX93.0, 1, 2)
ドライブモジュールはこのチェックバックを PLC に送り,どのドライブパラメー
タセットが現在アクティブであるかを知らせます。ビットコンビネーション A,
B,C を用いて,PLC は,8 つの異なるパラメータセットを SIMODRIVE 611D 用に
選択します。
Active motor(アクティブモータ A,B)(DB31, ... DBX93.3, 4)
ドライブモジュール (MSD) は,このチェックバックを PLC に送り,4 種類のうち
どのモータタイプ,またはどのモータ操作モードがアクティブであるかを知らせ
ます。メインスピンドルドライブに対して,スターモード (A=0, B=0) およびデル
タモード (A=1, B=0) が選択できます。
1-24
DRIVE ready(ドライブレディ)(DB31, ... DBX93.5)
ドライブがレディ状態であることを示すチェックバック信号です。軸/スピンド
ルがトラバースするための必要な件が満たされたことを意味します。
Speed controller integrator disabled(速度コントローラ積分器ディス
エーブル)(DB31, ... DBX93.6)
速度コントローラ積分器がディスエーブルされています。このため,速度コント
ローラはすでに PI から P コントローラに切替わっています。
810D にはありません。
Pulse enabled(パルスイネーブル)(DB31, ... DBX93.7)
ドライブモジュールのパルスがイネーブルになっています。この状態では軸/ス
ピンドルのトラバースが可能です。
Motor temperature warning(モータ温度警告)(DB31, ... DBX94.0)
モータの温度が警告しきい値を超えたことを PLC に知らせるためのドライブモ
ジュール信号です。モータの温度がこのレベルを維持し続けた場合,設定時間
(ドライブ MD)を過ぎるとドライブが停止し,パルスイネーブルが解除されます。
Heatsink temperature warning(ヒートシンク温度警告)(DB31, ...
DBX94.1)
ヒートシンクの温度が警告しきい値を超えたことを PLC に知らせるためのドライ
ブモジュール信号です。20 秒後に,該当するドライブモジュールへのパルスイ
ネーブルが解除されます。
Ramp-up complete(加速完了)(DB31, ... DBX94.2)
速度の実際値が,ドライブ MD 1426: SPEED_DES_EQ_ACT_TOL にセットされた
公差範囲内で新しいセットポイントに達したことを確認する信号です。これで加
速手順は完了しました。
これ以降,負荷変動により速度に変動が生じてもインタフェース信号は影響を受
けません。
|Md| < Mdx (DB31, ... DBX94.3)
現在のトルク |Md| が,ドライブ MD 1428: TORQUE_THRESHOLD_X でセットされ
たトルクしきい値 |Mdx| より小さいことを示す信号です。トルクしきい値は,速度
に依存する現在のトルク制限のパーセント値として入力します。
|nact| < nmin (DB31, ... DBX94.4)
実際の速度 |nact| が,設定最低速度 nmin(ドライブ MD 1418:
SPEED_THRESHOLD_MIN)より遅いことを示す信号です。
1-25
|nact| < nx (DB31, ... DBX94.5)
実際の速度 |nact| が,設定されたしきい値制限 nx(ドライブ MD 1417:
SPEED_THRESHOLD_X)より遅いことを示す信号です。
nact = nset (DB31, ... DBX94.6)
PLC がこの信号を受取ることにより,実際速度 nact が,ドライブ MD 1426:
SPEED_DES_EQ_ACT_TOL にセットされた公差範囲内で新しいセットポイントに
達し , 公差範囲内の速度を維持し続けることが確認されます。
Variable signaling function(可変シグナリングファンクション)
(DB31, ... DBX94.7)
可変シグナリングファンクションを使用すると,SIMODRIVE 611D が,軸の中で
プログラム可能なしきい値違反がないよう監視し,適切なインタフェース信号を
PLC に送ります。
監視量は,611D マシンデータを使用してセットします。
810D にはありません。
VDClink < warning threshold(警告しきい値)(DB31, ... DBX95.0)
DC リンク電圧 VDClink が DC リンク電圧しきい値の下限値未満になっていること
を PLC に知らせるドライブ信号です。( ドライブ MD 1604:
LINK_VOLTAGE_WARN_LIMIT).
■ コントラスト,モニタタイプ,言語および表示分解能の設定
システム起動後に有効となるコントラスト,モニタタイプ,言語,および表示分
解能は,操作パネルのマシンデータでセットできます。
コントラスト
システム起動後に MMC MD 9000: LCD_CONTRAST をセットしてモノクロ液晶画
面の付いた薄型の操作パネルのコントラスト(輝度)を調整することができます。
16 (0 ~ 15) ステップでコントラスト調整ができます。
モニタタイプ
最適な色を選択するために MMC MD 9001: DISPLAY_TYPE でモニタのタイプを指
定してください。
言語
YS840DI では,同時に 2 つの言語が使用できます。ソフトキーの選択によりオン
ラインモードで 2 つの言語を交互にセットできます。
MMC MD 9003: FIRST_LANGUAGE は,各システムの起動後に選択される言語を
決定します。
1-26
表示の分解能
MMC MD 9004: DISPLAY_RESOLUTION および MD 9010:
SPIND_DISPLAY_RESOLUTION(スピンドル用)をセットして,位置表示用に小数
点以下の桁数(小数点の後に続く 0 ~ 5 までの桁数)を定義します。
小数点以下の桁数の初期設定値は 3 です。⇒ 表示の最小単位 = 10-3 [mm] または [ 度 ]
■ 外部メモリ拡張でプログラムを処理する(SW 4 以降)
複雑なワークを製造するための個々の加工ステップに,プログラムシーケンスを
使用する場合があります。プログラムシーケンスは,非常に大きなメモリを必要
とするため,NC メモリには保存できません。
この種のプログラムは,「外部からの処理」モードでサブプログラムコール
EXTCALL を使用して,外部装置から読込むことができます。
「外部装置」として,MMC102/103(ハードディスク)などが使用できます。
基本的には,MMC102/103 のデータ管理システムのディレクトリ構造を介してアク
セスできるプログラムであれば読込むことができます(たとえば,ワーク,パー
トプログラム,サブプログラム,サイクルのディレクトリなど)。
以下の拡張機能が,「外部装置からの処理プログラム」ファンクションとして使用
できます。
• 外部サブプログラム:
「外部からの処理」モードでの加工サブプログラム
• モーダル加工:
リセット / パートプログラムが終了した後も,「外部からの処理」選択はアク
ティブのままです。
• FIFO バッファの設定可能なサイズ
■ 外部サブプログラム
EXTCALL
「外部サブプログラム」は,以下を指定してパートプログラムコマンド EXTCALL
で呼び出すことができます。
• コールパス(オプション)および
• サブプログラムの識別子
$SC_EXT_PROG_PATH
コールパスの柔軟な設定を可能にするため,チャンネル別設定データ
$SC_EXT_PROG_PATH が準備されています。$SC_EXT_PROG_PATH には,パス
名を含めることができ,これと,プログラムされたサブプログラム識別子と組み
合わせて,呼出すプログラムの絶対パス名を表します。
絶対パス名なしで外部サブプログラムを呼出す場合は,MMC が,NC メモリから
サブプログラムを呼出すときに使用するのと同じサーチパスを探しに行きます。
1-27
Call
パートプログラムコマンド EXTCALL で,外部サブプログラムを呼出します。
Off
EXTCALL にプログラムされたサブプログラム名と設定データ
$SC_EXT_PROG_PATH.
プログラムパスは以下を含む文字列で構成されます。
• $SC_EXT_PROG_PATH の内容(たとえば,/_N_WKS_DIR/_N_WKST1_DIR)
,
• セパレータとしての "/" 記号(パスが $SC_EXT_PROG_PATH で指定されている
場合),および
• EXTCALL にプログラムされたサブプログラムパスまたは識別子。
$SC_EXT_PROG_PATH の初期設定はブランクになっています。絶対パス名なしで
外部サブプログラムを呼出す場合は,MMC が,NC メモリからサブプログラムを呼
出すときに使用するのと同じ検索パスを探しに行きます。
1.
カレントディレクトリ/サブプログラム名
2.
カレントディレクトリ/サブプログラム名 _SPF
3.
カレントディレクトリ/サブプログラム名 _MPF
4.
/_N_SPF_DIR /サブプログラム名 _SPF
5.
/_N_CUS_DIR /サブプログラム名 _SPF
6.
/_N_CST_DIR /サブプログラム名 _SPF
「カレントディレクトリ」:選択されているメインプログラムが存在するディレク
トリを表します。
「サブプログラム名」:EXTCALL でプログラムされたサブプログラム名を表しま
す。
内部オペーションシーケンス
MMC は,チャンネル別 OPI 変数 "mmcCmdPrep" の中で呼出されるサブプログラム
のプログラムパスを受取ります。新しい "mmcCmdPrep" 信号が転送されたことを
確認する手段として,NCK 別の OPI 変数 "mmcCmdPrepCounter" がインクリメント
されます。これに応答して,MMC は要求されたサブプログラムのダウンロードを
開始し,対応するチャンネル別 OPI 変数 mmcCmdQuitPrep を確認応答として返し
ます。プログラム実行用の FIFO バッファが,NCK ディレクトリ /_N_SYF_DIR 内
に設定されます。バッファ名は NCK によって作成され,"mmcCmdPrep" 内のサブ
プログラムパスとともに MMC へ送られます。
サブプログラムレベルが「外部からの処理」モードで操作中の場合は,現在のプ
ログラムポインタに使用する OPI ブロック SPARPP 内の変数 "extProgFlag" がそれ
に応じてセットされます。
例:
$SC_EXT_PROG_PATH = "_N_WKS_DIR/_N_WST1"
メインプログラム _N_MAIN_MPF
(NC メモリ内に保存され,加工用に選択される)
:N010 PROC MAIN
1-28
N020 ....
N030
EXTCALL "ROUGHING"
N040 .....
N050 M30
SUBROUTINE _N_ROUGHING_SPF
(ワーク ->WST1 の下の MMC メモリに保存される)
N010 PROC ROUGHING
N020 G1 F1000
N030 X= ... Y= ... Z= ...
N040 .....
....
....
N999999 M17
リセット/電源オン
リセットまたは電源オンにより,外部サブプログラムコールは強制終了され,各
FIFO バッファは消去されます。
「外部メモリからの処理」用に選択されたプログラムは,リセット後も選択された
ままになります。電源オンで選択は削除され,そのかわりに初期プログラム MPF0
が選択されます。
■ 外部メモリからのモーダル加工プログラム
NC メモリ内の次のプログラムによる選択解除
MMC102/103 に対して「外部メモリからの処理」のためにプログラムが選択され
た場合,その選択はリセットまたはパートプログラムの終了後も有効です。
「外部
メモリからの処理」モードは,NC メモリに保存されている別のプログラムが実行
のために選択された時点で解除されます。
■ 構成可能な FIFO バッファ
「外部メモリからの処理」モードでプログラム(メインプログラムまたはサブプロ
グラム)を実行するためには,NCK の中に FIFO バッファを設定することが必要で
す。このバッファのサイズは,あらかじめ 30 KB に設定されています。
バッファのサイズは,$MN_EXT_PROG_BUFFER_SIZE にセットすることができま
す。選択されたバッファのサイズを確保するスペースが足りない場合には,ア
ラーム 14600 "Reload buffer cannot be created"(再読込みされたバッファが作成でき
ない)が出力されます。
$MN_EXT_PROG_BUFFER_SIZE の値が -1 にセットされていると,メモリの使用
可能なスペースはすべて FIFO バッファ作成のために使用されます。この設定に
は,NCK の「外部メモリからの処理」がひとつのプログラムレベルだけに使用さ
れていることが前提条件となります。
1-29
FIFO バッファが設定されると,常に 5KB のメモリが確保されます。編集などの
ファンクションを使う場合にこのメモリが必要となります。
FIFO バッファのサイズが 5 KB に満たない場合にもアラーム 14600 が発生します。
■ 一般ファンクション
■ テクノロジモード
SW 4 以降では,マシンデータ MD 27800: TECHNOLOGY_MODE の中に,チャン
ネル別のマシンテクノロジを指定できます。
とりわけ,MMC,PLC および標準サイクルによる評価用としてこの情報が提供さ
れます。
Siemens 社は,フライス加工用の標準マシンデータを提供しています。フライス加
工以外の工作機械をご使用になる場合は,マシンデータにセットされるテクノロ
ジモードによっても異なりますが,MMC または PLC により別のデータ/プログラ
ムが読込まれます。
MD についての詳細は,1.1.4「■チャンネル別マシンデータ」を参照してください。
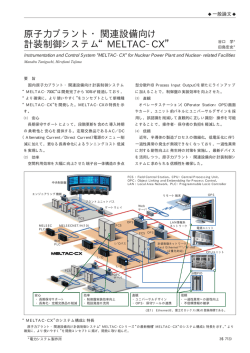
■ PLC 変数の読取りおよび書込み(SW 4 以降)
高速データチャンネル
PLC および NC モジュールの通信バッファ (DPR) には,素早い情報交換ができる
ように,メモリエリアが確保されています。このメモリエリアで,あらゆるタイ
プの変数(I/O,DB,DW,マーカ)のやりとりが行われます。
PLC は,’Function Calls’ (FC) (ファンクションコール)を使って,また,NCK は ’$
variables’($ 変数)を使ってメモリにアクセスします。
メモリエリアの構成
(NCK および PLC)ユーザプログラミングエンジニアが,このメモリエリアを構
成します。正しいデータフォーマットによりリミットが選択されていれば,メモ
リ内すべての保存位置をアドレス指定することができます(4 バイトリミットには
DWORD,2 バイトリミットには WORD など)。
データタイプおよびメモリエリア内の位置オフセットを介してメモリにアクセス
できます。
NC からのアクセス
NC が(パートプログラムからの)PLC 変数に素早くアクセスできるよう,NCK に
$ 変数が用意されています。PLC は,ファンクションコール (FC) を使って $ 変数
を読み書きします。NCK との迅速なデータのやりとりが可能になります。
$ 変数は,前処理中およびシンクロナイズドアクション中に(NCK により)アク
セスされます。
データタイプ情報は,「$ 変数」データタイプによって決まります。また,位置イ
ンデックスは配列インデックスとして指定されます。
1-30
以下の「$ 変数」が使用できます。
$A_DBB
// Data byte (8 ビット )
$A_DBW
// Data word (16 ビット )
$A_DBD
// Data double word (32 ビット )
$A_DBR
// Real data (32 ビット )
PLC からのアクセス
PLC は,’Function Calls’ (FC)(ファンクションコール)を使ってメモリにアクセス
します。これらの FC は,データが DPR 内に迅速に(つまり PLC サイクルの開始
時だけでなく)読み書きされるようにします。FC は,データタイプ情報および位
置オフセットをパラメータとして受取ります。
CALL FC
データタイプ Dword (4
bytes)
位置オフセット (0x04)
図 1.6 NCK-PLC 間データ交換用通信バッファ (DPR)
一般条件
1. (NCK および PLC の)ユーザプログラミングエンジニアが,DPR メモリエリア
を構成します。構成上の不整合性についてのチェックは行われません。
2. 入力および出力命令には,合計 1024 バイト使用できます。
3. 単一ビットオペレーションはサポートしていません。ユーザ(プログラミング
エンジニア)側で,バイトオペレーションにリンクさせる必要があります。
4. 変数の内容は通信バッファ内で直接操作されます。したがって,数回にわたっ
て変数の値が求められたり,変数がリンクする多重アクセスオペレーションの
結果,アクセス途中で値が変化することをユーザは知っておく必要があります
(すなわち,値をローカル変数または R パラメータに一時的に保存したり,セマ
フォを設定したりすることが必要です)
。
5. ユーザのプログラミングエンジニアが,アクセスオペレーションと,異なる
チャンネルからの通信バッファとの調整を行います。
6. データの整合性が保証されるのは,16 ビット(バイトおよびワード)までのア
クセスオペレーションに限られます。ユーザのプログラミングエンジニアは,
1-31
32 ビット変数(ダブルおよびリアル)の送信が確実に行えるようにしなければ
なりません。このために PLC では単一セマフォ方式を採用しています。
7. PLC は,データを ’Little Endian’ フォーマットで DPR に保存します。
8. $A_DBR 付きで送信される値はデータ変換されるために精度を欠きます。浮動
小数点数値のデータフォーマットは,NCK では DOUBLE(64 ビット)
,PLC で
は FLOAT(32 ビット)です。デュアルポート RAM での保存に使用される
フォーマットは,FLOAT です。デュアルポート RAM では,保存の前後にそれ
ぞれ変換が行われます。
デュアルポート RAM に保存されている変数に対して NCK から読取り/書込み
アクセスがあると,変換は 2 回行われます。データが異なるフォーマットで保
存されているため,読取り値と書込み値との間に違いが生じるのは避けられま
せん。
問題の解決策(例)
:
’EPSILON’ と比較(小さな偏差)
N10 DEF REAL DBR
N12 DEF REAL EPSILON = 0.00001
N20 $A_DBR[0]=145.145
N30 G4 F2
N40 STOPRE
N50 DBR=$A_DBR[0]
N60 IF ( ABS(DBR/145.145-1.0) < EPSILON ) GOTOF ENDE
N70 MSG ( "Error" )
N80 M0
N90 ENDE:
N99 M30
起動
同時に書込める出力変数の最大数は(ブロックサーチにも適用可)
,メモリ構成マ
シンデータ MD 28150 MM_NUM_VDIVAR_ELEMENTS を介してセットされます。
このマシンデータの初期値は ’0’ です。
例
WORD は PLC から NC へ送られます。
NCK 入力(PLC 出力エリア)内の位置オフセットは,4 つ目のバイトです。
ポジションオフセットは,データ幅の整数倍数です。
1-32
• PLC からの書込み
....
CALL FC21 (
Enable :=M10.0, ;If TRUE, then FC21 active
Funct :=B#16#4,
S7Var :=P#M 104.0 WORD1,
IVAR1 :=04,
IVAR2 :=-1,
Error :=M10.1,
ErrCode :=MW12);
....
)
• パートプログラムを読込む
...
PLCDATA = $A_DBW[4];
// Read a word
...
電源 ON,ブロックサーチ中の動作
DPR 通信バッファは,
「電源 ON」時に初期化されます。
「ブロックサーチ」中には,(アナログ,デジタル出力の書込みと類似した)アプ
ローチブロックで PLC 変数出力は収集され DPR へ送られます。
この点においては,他のステータス遷移は無効です。
1.1.3 補足条件
なし
1-33
1.1.4 データの説明 (MD,SD)
■ 一般マシンデータ
10361
MD 番号
FASTIO_DIG_SHORT_CIRCUIT
初期設定:0
最小入力リミット:-
最大入力リミット:-
変更が有効になるための条件:
電源オン
保護レベル:2/7
単位:-
データタイプ:DWORD
適用開始 SW バージョン:4.2
意味:
高速 NCK I/O のデジタル出力信号と入力信号との間の定義された短絡。
短絡は,高速 NCK I/O あるいは PLC(VDI インタフェースを介して)から読
込まれた信号ステータスと定義された出力信号との間で,ロジック演算をと
おして内部的に実施される。
デジタル入出力の短絡
上書きモードである入力ビットに対して複数の出力ビットが指定された場合
は,演算結果はリスト中で定義された最後の割当てで決まる。
存在しないかアクティブになっていない入出力 (MD 10350:
FASTIO_DIG_NUM_INPUTS, MD 10360: FASTIO_DIG_NUM_OUTPUTS) が定
義された場合は,それらは無視され,アラームは発生しない。
ビット 0 ~ 7 (LSB):
書込む入力バイト (1 ~ 5) の番号
ビット 8 ~ 15:
入力バイト中のビット番号 (1 ~ 8)
A0 (16 進)が入力ビット番号に追加されると,外部入力ステータスは上書き
されず,指定された出力と AND される。
B0(16 進)が入力ビット番号に追加されると,外部入力ステータスは上書き
されず,指定された出力と OR される。
ビット 16 ~ 23:
使用する出力バイト (1 ~ 5) の番号
ビット 24 ~ 31 (MSB):
出力バイト中のビット番号 (1 ~ 8)
アプリケーション例
FASTIO_DIG_SHORT_CIRCUIT[0] = H04010302
入力:第 2 バイトの第 3 ビット
出力:第 1 バイトの第 4 ビット(= 第 4 オンボード NCU 出力)
入力ステータスは指定された出力によって上書きされる。
FASTIO_DIG_SHORT_CIRCUIT[1] = H0705A201
入力:第 1 バイトの第 2 ビット(= 第 2 オンボード NCU 入力)
出力:第 5 バイトの第 7 ビット
入力ステータスは指定された出力と AND される。
FASTIO_DIG_SHORT_CIRCUIT[2] = H0103B502
入力:第 2 バイトの第 5 ビット
出力:第 3 バイトの第 1 ビット
入力ステータスは指定された出力と OR される。
1-34
11120
MN_LUD_EXTENDED_SCOPE
MD 番号
プログラムグローバル変数の起動
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更が有効になるための条件:
電源オン
保護レベル:2/7
単位:-
データタイプ:BOOL
適用開始 SW バージョン:4.4
意味:
MD = 0:メインプログラムレベルのユーザデータはこのレベルでのみアク
ティブ。
MD = 1:メインプログラムレベルのユーザデータはサブプログラムレベルで
も見える(プログラムグローバル変数 PUD)
アプリケーション例
/PGA/ を参照。
■ チャンネル別マシンデータ
27800
TECHNOLOGY_MODE
MD 番号
チャンネル中のテクノロジ
初期設定:0
最小入力リミット:0
最大入力リミット:255
変更が有効になるための条件:
NEW_CONF
保護レベル:2/7
単位:-
データタイプ:バイト
適用開始 SW バージョン:4.2
意味:
このマシンデータを使用すると,チャンネル別に加工テクノロジを指定でき
る。
MD=0 フライス加工
MD=1 旋盤加工
MD=2 研削加工
MD=3 ニブリング加工
MD=4 ...(必要に応じて他のテクノロジを追加する)
アプリケーション例
他のファンクションとともに,本情報は MMC,PLC および標準サイクルに
よる評価を可能にすることを目的としている。
28150
MM_NUM_VDIVAR_ELEMENTSPLC
MD 番号
PLC 変数用の書込み要素の数
初期設定:0
最小入力リミット:0
最大入力リミット:-
変更が有効になるための条件:
電源オン
保護レベル:2/7
単位:-
データタイプ:DWORD
適用開始 SW バージョン:4.2
意味:
この MD はユーザが PLC 変数 ($A_DBx=...) を書くときに使用できる要素の数
を定義する。
この要素数はブロックサーチ中でも適用されるが,シンクロナイズドアク
ションには適用されない。各要素は約 24 バイトのメモリを必要とする。
PLC 変数の高速シーケンシャル書込みの各書込みオペレーションにつき 1 つ
の要素が必要である。しかし,時間をずらして書込み用に変数をアクセスす
る(ブロックがすでにトランスポートされている)のであれば,要素の数は
減らすことができる。
読取りアクセスオペレーションの数 (var=$A_DBx) には制限がない。
アプリケーション例
1-35
■ 軸/スピンドル別 NCK マシンデータ
33050
MD 番号
LUBRICATION_DIST
PLC から潤滑制御するための移動距離設定
初期設定:100 000 000
最小入力リミット:0
最大入力リミット:プラス
変更が有効になるための条件:
NEW_CONF
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
MD で定義された距離だけ移動が完了すれば,軸インタフェース信号
"lubrication pulse"(潤滑パルス)のステータスが反転し,自動潤滑装置の起動
が可能となる。
移動パスは電源オン後に積算される。
"lubrication pulse" は軸にもスピンドルにも使用できる。
アプリケーション例
いずれの場合にも,マシンベッドは移動距離の関数として潤滑できる。
例外,エラー
注記:0 を入力すると,IS "Lubrication pulse" (DB31, ... DBX76.0) が各サイクル
でセットされる。
関連性
IS "Lubrication pulse" (DB31, ... DBX76.0)
35590
PARAMSET_CHANGE_ENABLE
MD 番号
パラメータセット変更可能
初期設定:0
最小入力リミット:0
最大入力リミット:2
変更が有効になるための条件:
電源オン
保護レベル:2 / 7
単位:-
データタイプ:バイト
適用開始 SW バージョン:4.1
意味:
0:
パラメータセットの変更は制御できない。最初のパラメータセットあるいは
内部パラメータセット選択は常にアクティブ。
1:
サーボで適用されるパラメータセットは VDI インタフェースを介して指定さ
れる。パラメータセット 1 ~ 6 が選択可能。パラメータセットは 0 ~ 5 の 2
進化された値の範囲の DB31 ff,DBB9,ビット 0 ~ 2 で選択する。
値 6 と 7 はパラメータセット番号 6 を選択する。PLC からの選択よりも内部
パラメータ選択の方が優先する。
2:
1 と同じ。ただし,内部パラメータセットは停止される。
パラメータセットには次の軸マシンデータが含まれている。
$MA_AX_VELO_LIMIT
$MA_POSCTRL_GAIN
$MA_EQUIV_CURRCTRL_TIME
$MA_EQUIV_SPEEDCTRL_TIME
$MA_DYN_MATCH_TIME
$MA_DRIVE_AX_RATIO_DENOM
$MA_DRIVE_AX_RATIO_NUMERA
アプリケーション例
1.1.6 を参照
関連性
インタフェース信号 DB31, ..., DBX9.0, 1 ,2 および DBX69.0, 1 ,2
参照
1.9 補助機能出力(H2)
1-36
36060
STANDSTILL_VELO_TOL
MD 番号
Maximum velocity/speed "Axis/spindle stationary"(最大速度「軸/スピンドル静止」)
初期設定:5
最小入力リミット:0
最大入力リミット:プラス
変更が有効になるための条件:
NEW_CONF
保護レベル:2
単位:
直線軸:mm/min
回転軸:rpm
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
軸速度およびスピンドル速度用のゼロ速度範囲がこのマシンデータでセット
される。
軸の現在の実際速度あるいはスピンドルの実際速度が入力された値未満で
あって,セットポイントが NC から軸/スピンドルにもはや出力されていな
ければ,IS "axis/spindle stationary"(軸/スピンドル静止)(DB 31 ...., DBX61.4)
がイネーブルされる。
IS "Axis/
Spindle
station."
アプリケーション例
軸/スピンドルが制御された状態で静止することを保証するため,パルスイ
ネーブルは軸/スピンドルが静止するまではキャンセルすべきではない。そ
うしないと停止時に軸が流れる。
関連性
IS "Axis/spindle stationary" (DB31, ... DBX61.4)
36620
SERVO_DISABLE_DELAY_TIME
MD 番号
カットアウト遅延サーボイネーブル
初期設定:0.1
最小入力リミット:0
最大入力リミット:プラス
変更が有効になるための条件:
NEW_CONF
保護レベル:2
単位:s
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
アプリケーション例
障害が発生してからの「サーボイネーブル」キャンセルの最大遅延時間。
軸/スピンドルがまだ動いていれば,ここでセットされた遅延時間後に直ち
にドライブの速度イネーブル(サーボイネーブル)が制御装置によってキャ
ンセルされる。
入力された遅延時間は次のイベントで起動する。
• 軸が直ちに停止するような障害が発生した場合。
• IS "Servo enable" が PLC によってキャンセルされた場合。
実際速度がゼロ速度範囲内に入ると (MD 36060: STAND-STILL_VELO_ TOL),
「サーボイネーブル」がそのドライブについてキャンセルされる。
セットする時間は,軸/スピンドルが最大トラバース速度からゼロ速度にな
れるだけの十分な長さがなければならない。
軸/スピンドルが静止していれば,そのドライブについて「サーボイネーブ
ル」が直ちにキャンセルされる。図 1.5 も参照。
ドライブの速度制御は,軸/スピンドルが最大トラバース速度からゼロ速度に
なれるだけの十分な時間だけ維持されるべきである。移動中の軸/スピンドル
の「サーボイネーブル」は静止してからキャンセルされなければならない。
1-37
36620
SERVO_DISABLE_DELAY_TIME
MD 番号
カットアウト遅延サーボイネーブル
例外,エラー
注意:サーボイネーブルカットアウト遅延の設定が小さすぎると,軸/スピ
ンドルが移動中に「サーボイネーブル」がキャンセルされることになる。こ
の場合にはセットポイント 0 で軸/スピンドルが突然停止する。
このため,SERVO_DISABLE_DELAY_TIME はエラー状況での減速ランプ時
間 (MD: AX_EMERGENCY_STOP_TIME) より大きくなっているべきである。
IS "Servo enable" (DB31, ... DBX2.1)
MD: AX_EMERGENCY_STOP_TIME (エラー発生時の減速ランプ時間)
関連性
■ 操作パネル用のマシンデータ
9000
MD 番号
LCD_CONTRAST
初期設定:7
最小入力リミット:0
最大入力リミット:15
変更が有効になるための条件:
電源オン
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1.1
意味:
モノクロ(モニタタイプ 0)LCD 付きの薄型操作パネルのシステムスタート
アップ時のコントラストはこの MD でセットすることができる。16 レベルの
コントラスト(輝度)が設定できる。
コントラスト
設定
15
効果
画面が明るくなる
↑
:
7
:
初期設定
↓
画面が暗くなる
0
コントラストは診断エリアのソフトキー "LCD dark/bright" でも変更できる。
しかし電源オン後は,MD: LCD_CONTRAST でセットされた値がアクティブ
となる。
この MD は次の場合は無意味
カラー LCD (MD 9001: DISPLAY_TYPE = <> 0) 付きの薄型操作パネル
関連性
MD 9001: DISPLAY_TYPE (monitor type)
参照
YS840DI ユーザーズマニュアル・操作編
9001
MD 番号
DISPLAY_TYPE
初期設定:0
最小入力リミット:0
最大入力リミット:2
変更が有効になるための条件:
電源オン
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1.1
意味:
カラー設定を最適にするため,モニタタイプを指定する必要がある。
次の割当てが適用される。
モニタタイプ
モニタ タイプ
薄型操作パネル OP031 LCD ディスプレイ(モノクロ)
薄型操作パネル OP031 LCD ディスプレイ(カラー)
0
1
OP032 カラーモニタ
2
1-38
9002
DISPLAY_MODE (MMC 100 のみ )
MD 番号
外部モニタ
初期設定:0
最小入力リミット:0
最大入力リミット:2
変更が有効になるための条件:
電源オン
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1
意味:
カラー調整を最適にするため,MMC に接続する外部モニタタイプを指定しな
ければならない。次の設定が適用される。
モニタ
タイプ
0
モニタ接続なし
モノクロモニタ
1
2
カラーモニタ
9003
MD 番号
FIRST_LANGUAGE(MMC 100 のみ )
初期設定:1
最小入力リミット:1
最大入力リミット:2
変更が有効になるための条件:
電源オン
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1.1
意味:
YS840DI では 2 つの言語を同時に使用できる。システムスタートアップ後に
自動的にアクティブになる言語をマシンデータでセットする。
診断エリアのソフトキーを使用すると第二言語に一時的に切換えることがで
きる。しかし,電源オン後は,MD 9003: FIRST_LANGUAGE でセットした言
語が再びアクティブになる。
参照
YS840DI ユーザーズマニュアル・操作編
9004
MD 番号
DISPLAY_RESOLUTION
初期設定:3
最小入力リミット:0
最大入力リミット:5
変更が有効になるための条件:
電源オン
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1.1
意味:
位置表示用の小数点以下の桁数をこの MD で定義する。
位置表示は符号と小数点も含めて最大 12 文字で表示される。小数点以下の桁
数は 0 ~ 5 の間でセットできる。
表示言語
表示最小単位
初期設定は小数点以下 3 桁である。⇒ 表示分解能 = 10-3 [mm] あるいは [ 度 ]
関連性
表示最小単位は計算分解能 (MD 10200: INT_INCR_PER_MM あるいは MD:
INT_INCR_PER_DEG) に対応していなければならない。
1-39
9006
DISPLAY_BLACK_TIME (MMC100 の場合 )
MD 番号
画面が暗くなるまで時間設定
初期設定:0
最小入力リミット:0
最大入力リミット:60
変更が有効になるための条件:
電源オン
保護レベル:2/4
単位:分
データタイプ:バイト
適用開始 SW バージョン:2.1
意味:
このマシンデータで定義された時間中にキーボードのどのキーも押されなけ
れば,画面は自動的に暗くなる。
値ゼロをセットすると,自動明/暗切換えはオフになる。
注:画面の自動明/暗切換えは IS "Screen dark" = "0" にセットされている場合
にのみ行われる。
関連性
IS "Screen dark" (DB19, DBX0.1)
9010
MD 番号
SPIND_DISPLAY_RESOLUTION
初期設定:3
最小入力リミット:0
最大入力リミット:5
変更は直ちに有効となる
保護レベル:3/4
単位:-
データタイプ:バイト
適用開始 SW バージョン:4
意味:
位置表示用の小数点以下の桁数をスピンドル値 MD 用にマシンデータ表示分
解能で定義する。
位置表示は符号と小数点も含めて最大 12 文字で表示される。小数点以下の桁
数は 0 ~ 5 の間でセットできる。
スピンドル値の表示最小単位
初期設定は小数点以下 3 桁である。⇒ 表示分解能 = 10-3 [mm] あるいは [ 度 ]
関連性
表示分解能は計算分解能 (MD 10200: INT_INCR_PER_MM あるいは MD:
INT_INCR_PER_DEG) に対応していなければならない。
9011
MD 番号
DISPLAY_RESOLUTION_INCH
初期設定:4
最小入力リミット:0
最大入力リミット:6
変更は直ちに有効となる
保護レベル:3/4
単位:-
データタイプ:バイト
適用開始 SW バージョン:5
意味:
位置表示用の小数点以下の桁数をインチ法用にマシンデータ表示分解能で定
義する。
位置表示は符号と小数点も含めて最大 12 文字で表示される。小数点以下の桁
数は 0 ~ 6 の間でセットできる。
インチ法での表示最小単位
初期設定は小数点以下 4 桁である。⇒ 表示分解能 = 10-4 [ インチ ]
回転軸の場合は小数点以下 3 桁が表示される。
関連性
表示分解能は計算分解能 (MD 10200: INT_INCR_PER_MM あるいは MD:
INT_INCR_PER_DEG) に対応していなければならない。
1-40
9200-9255
USER_CLASS_....
MD 番号
以下のアクセス用の保護レベル
初期設定:7
最小入力リミット:0
最大入力リミット:7
変更は直ちに有効となる
保護レベル:2
単位:-
データタイプ:バイト
適用開始 SW バージョン:1.1
9200
USER_CLASS_READ_TOA
MD 番号
... 全ツールオフセット読取り
9201
MD 番号
USER_CLASS_WRITE_TOA_GEO
... ツールジオメトリデータ書込み
9202
USER_CLASS_WRITE_TOA_WEAR
MD 番号
... ツール磨耗データ書込み
9203
USER_CLASS_WRITE_FINE
MD 番号
... 保護レベル書込み(微)
9209
USER_CLASS_WRITE_TOA_ADAPT
MD 番号
... ツールアダプタジオメトリデータ書込み
9210
USER_CLASS_WRITE_ZOA
MD 番号
... 設定可能ゼロオフセット書込み
9211
MD 番号
USER_CLASS_READ_GUD_LUD
... ユーザ変数読取り
9212
MD 番号
USER_CLASS_WRITE_GUD_LUD
... ユーザ変数書込み
9213
USER_CLASS_OVERSTORE_HIGH
MD 番号
... 拡張オーバストア
9214
USER_CLASS_WRIGHT_PRG_CONDIT
MD 番号
... プログラム条件変更
9215
USER_CLASS_WRITE_SEA
MD 番号
... 設定データ書込み
9216
MD 番号
USER_CLASS_READ_PROGRAM (MMC 100 のみ )
9217
MD 番号
USER_CLASS_WRITE_PROGRAM (MMC 100 のみ )
... 設定データ書込み
9218
USER_CLASS_SELECT_PROGRAM
MD 番号
... プログラム選択
9219
USER_CLASS_TEACH_IN
MD 番号
... 教示
9220
USER_CLASS_PRESET
MD 番号
... プリセット
9221
MD 番号
USER_CLASS_CLEAR_RPA
... 全 R パラメータ削除
9222
MD 番号
USER_CLASS_WRITE_RPA
...R パラメータ書込み
9223
USER_CLASS_SET_V24 (MMC 100 のみ )
MD 番号
...V24 を介したユーザパラメータ
9224
MD 番号
USER_CLASS_READ_IN (MMC 100 のみ )
... パートプログラム読取り
... データ読取り
9225
USER_CLASS_READ_CST (MMC 100 のみ )
MD 番号
... 標準サイクル
1-41
9200-9255
USER_CLASS_....
MD 番号
以下のアクセス用の保護レベル
9226
USER_CLASS_READ_CUS (MMC 100 のみ )
MD 番号
... ユーザサイクル
9227
USER_CLASS_SHOW_SBL2
MD 番号
スキップ単一ブロック 2 (SBL2)
初期設定:7
最小入力リミット:0
最大入力リミット:7
変更は直ちに有効となる
保護レベル:3/4
単位:-
データタイプ:バイト
適用開始 SW バージョン:3.5 (MMC 100)
意味:
SBL2 ファンクションは,現在アクティブな保護レベルが MD でセットされて
いるものと同じかあるいはそれ以上のアクセス許可を提供する場合にのみ,
オペレータインタフェースで使用できる。
例外,エラー
SBL2 が選択された後で,SBL2 を表示しないレベルにアクセス保護がセット
された場合は,SBL2 は選択されたままとなる。SBL1 に切換えると SBL2 は自
動的に選択解除される。
参照
/BA/ Installation and Start-Up Guide 840D/810D/FM-NC
9228
MD 番号
USER_CLASS_READ_SYF ...
ディレクトリ SYF 選択
9229
MD 番号
USER_CLASS_READ_DEF ...
ディレクトリ DEF 選択
9230
USER_CLASS_READ_BD ...
MD 番号
ディレクトリ BD 選択
9450
MD 番号
MM_WRITE_TOA_FINE_LIMIT
初期設定:0
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる
保護レベル:3/4
単位:Length
データタイプ:DOUBLE
適用開始 SW バージョン:4.2
意味:
ツール磨耗を入力するときには,前回の値と今回の値との差がここで入力す
るリミットを超えてはならない。
関連性
MD 9202: USER_CLASS_WRITE_TOA_WEAR
9451
MD 番号
MM_WRITE_ZOA_FINE_LIMIT
初期設定:0
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる
保護レベル:3/4
単位:Length
データタイプ:DOUBLE
適用開始 SW バージョン:4.2
意味:
オフセットを入力するときには,前回の値と今回の値との差がここで入力す
るリミットを超えてはならない。
関連性
MD 9210: USER_CLASS_WRITE_ZOA
磨耗リミット値
オフセットリミット値
1-42
■ 外部メモリからプログラムを処理するためのマシンデータ
(SW 4 以降)
18360
MD 番号
MM_EXT_PROG_BUFFER_SIZE
外部メモリから処理する場合の FIFO バッファサイズ
初期設定:30
最小入力リミット:-1
最大入力リミット:
変更が有効になるための条件:
電源オン
保護レベル:2/7
単位:1000000
データタイプ:DWORD
適用開始 SW バージョン:4.2 (MMC 102/103)
意味:
プログラムされた値が使用可能なメモリ空間を超えていれば,パートプログ
ラムが選択されるかサブプログラムがコールされるときにアラーム 14600 が
出力される。システムは 5KB のメモリ空間を予備として残す。"-1" をセット
すると,予備の 5KB を残して使用可能なすべてのメモリ空間 が使用される。
この設定は,NCK を通して一つのプログラムレベルが "Process from external
memory"(外部メモリからの処理)モードで動作している場合にのみ意味を持
つ。
FIFO バッファの実際のサイズが 5KB 未満になるとアラーム 14600 が発生す
る。
例外,エラー
参照
18362
MM_NUM_EXT_PROG
MD 番号
外部メモリから同時に処理できるプログラムレベルの数
初期設定:1
最小入力リミット:0
最大入力リミット:20
変更が有効になるための条件:
電源オン
保護レベル:2/7
単位:-
データタイプ:バイト
適用開始 SW バージョン:4.2 (MMC 102/103)
意味:
システム資源が「外部メモリからの処理」モードで MMC <-> NCK 通信に使
用される。この設定はマシンデータ $MN_NUM_EXT_PROG で定義される。
システム資源が不足するとアラーム 14601 が出力される。
例外,エラー
参照
■ 外部メモリからプログラムを処理するための設定データ(SW 4 以降)
42700
MD 番号
EXT_PROG_PATH
初期設定:"", "", "", ...
最小入力リミット:-
最大入力リミット:-
変更が有効になるための条件:
電源オン
保護レベル:3/4
単位:-
データタイプ:STRING
適用開始 SW バージョン:4.2 (MMC 102/103)
意味:
合計パスは $SC_EXT_PROG_PATH に入っている文字列 + プログラムされたサ
ブブログラム名から構成される。
外部サブプログラムコール EXTCALL 用のプログラムパス
例外,エラー
参照
1-43
■ システム変数(SW 4 以降)
名称
$P_FUMB
意味
未割当てのパートプログラムメモリ(フリーなユーザメモリバッファ)
データタイプ
DWORD
値の範囲
アクセス
パートプログラム
読込み
暗示的な処理停止
パートプログラム
書込み
シンクロナイズド
アクション読込み
シンクロナイズド
アクション書込み
yes
-
-
-
-
-
-
-
名称
$A_DBB[n]
意味
PLC 上のデータ(データタイプ:バイト)
データタイプ
INT
値の範囲
0 ~ 255
項目
意味
値の範囲
PLC-NC 通信入力エリア内の位置オフセット
0-MD_MAXNUM_VDI_VAR
パートプログラム
読込み
パートプログラム
書込み
シンクロナイズド
アクション読込み
シンクロナイズド
アクション書込み
yes
yes
yes
アクセス
暗示的な処理停止
yes
名称
$A_DBW[n]
意味
PLC 上のデータ(データタイプ:WORD)
データタイプ
INT
値の範囲
0 ~ 65535
項目
意味
値の範囲
PLC-NC 通信入力エリア内の位置オフセット
0-MD_MAXNUM_VDI_VAR
パートプログラム
読込み
パートプログラム
書込み
シンクロナイズド
アクション読込み
シンクロナイズド
アクション書込み
yes
yes
yes
アクセス
暗示的な処理停止
yes
名称
$A_DBD[n]
意味
PLC 上のデータ(データタイプ:DWORD)
データタイプ
INT
値の範囲
0 ~ 4294967295
項目
意味
値の範囲
PLC-NC 通信入力エリア内の位置オフセット
0-MD_MAXNUM_VDI_VAR
パートプログラム
読込み
パートプログラム
書込み
シンクロナイズド
アクション読込み
シンクロナイズド
アクション書込み
yes
yes
yes
アクセス
暗示的な処理停止
yes
1-44
名称
$A_DBR[n]
意味
PLC 上のデータ(データタイプ:REAL)
データタイプ
DOUBLE
値の範囲
1491298E-45 ~ 3402823E+38
項目
意味
値の範囲
PLC-NC 通信入力エリア内の位置オフセット
0-MD_MAXNUM_VDI_VAR
パートプログラム
読込み
パートプログラム
書込み
シンクロナイズド
アクション読込み
シンクロナイズド
アクション書込み
yes
yes
yes
アクセス
暗示的な処理停止
yes
1-45
1.1.5 信号の説明
信号概要は次に説明する信号だけしか一覧表示していません。全ての信号の一覧
表示については次を参照してください。
参照: パラメータ一覧
■ NC 信号
■ PLC から NC への信号 (DB10)
DB10
Keyswitch position 0 to 3(キースイッチ位置 0 ~ 3)
DBX56.4 ~ 56.7
データブロック
NC への信号 (PLC → NC)
エッジ評価:なし
信号更新:周期的
信号の意味
いくつかのデータタイプへのアクセスは,キースイッチ位置でディスエーブルする
ことができる。
データの入力,変更,削除,および操作パネルでのいくつかの操作は,この方法で
特定のユーザグループに対してディスエーブルすることができる。
キースイッチ位置 0 は許可するアクセス権の数が最も少なく,キースイッチ位置 3
は許可するアクセス権の数が最も多い。
信号 "Keyswitch positions 1 to 3" (キースイッチ位置 1 ~ 3)は,マシン制御パネル
のキースイッチから直接定義することも,PLC ユーザプログラムから定義すること
もできる。
いずれの場合にも,一つのインタフェース信号のみをセットしなければならない。
同時に複数のインタフェース信号をセットすると,それらは無効となってキース
イッチ位置 3 が自動的にセットされる。
信号が有効となる最初の SW バージョン:1.1
次の信号の組合わせが適用される : DB10, DBB56
Bit 7 Bit 6 Bit 5 Bit 4
キースイッチ位置
0
0
0
0
1
1
0
0
1
0
2
0
1
0
0
3
1
0
0
0
保護レベルに合わせて,ディスエーブルされたデータエリアが MMC マシンデータ
中のキースイッチ位置に割当てられる(1.1.2「■パスワードおよびキースイッチを
介してのアクセス保護」を参照)。
アプリケーション例
オペレータ,プログラマ,あるいはインストレーションエンジニアに与えられてい
るアクセス権によって,キースイッチによって特定のファンクションがディスエー
ブルされる。これによって,オペレータが誤ってデータ(たとえばゼロオフセッ
ト)を変更したり,プログラム条件を起動したりする(たとえばドライランフィー
ドレートを選択する)ことがなくなる。
関連性
パスワードでのディスエーブル(1.1.2「■パスワードおよびキースイッチを介して
のアクセス保護」を参照)
■ NC から PLC への信号 (DB10)
DB10
DBX103.0
MMC alarm is active(MMC アラームがアクティブ)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは 少なくとも一つの MMC アラーム(アラーム番号 100 000 ~ 105 999)がアクティ
信号遷移 0 → 1
ブ。
1-46
DB10
DBX103.0
MMC alarm is active(MMC アラームがアクティブ)
データブロック
NC からの信号 (NC → PLC)
信号ステータス 0 あるいは MMC アラームは一切アクティブでない。
信号遷移 1 → 0
DB10
DBX104.7
NCK-CPU Ready(NCK-CPU レディ)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
NCK CPU が準備完了していて PLC に周期的に送信している。
信号ステータス 0 あるいは
信号遷移 1 → 0
NCK CPU の準備ができていない。
信号が有効となる最初の SW バージョン:1.1
正しくスタートし,最初の OB1 サイクルが完了すると(初期設定サイクル)
,PLC
と NCK はハートビート信号 (sign of life signals) を継続的にやりとりする。
PLC 基本プログラムが IS "NCK CPU Ready" を 1 にセットした。
NCK からハートビート信号が受信されなければ,PLC/NCK インタフェースは PLC
基本プログラムによってキャンセルされ,IS "NCK CPU Ready" が 0 にセットされ
る。
PLC 基本プログラムは次の処理を行う。
• NCK から PLC へのステータス信号(ユーザインタフェース)がリセットされる。
• 補助ファンクション用の変更信号が削除される。
• PLC から NCK へのユーザインタフェースの周期的な処理が行われなくなる。
アプリケーション例
たとえば,個々の PLC 出力が PLC ユーザプログラムから定義されたステータスに
セットされる。
参照
アラーム一覧(個々のアラームが発生し,診断アクションが可能になったときの
NC 制御について)
1.15 基本的 PLC プログラム(P3)
DB10
DBX108.2
DBX108.3
MMC-CPU1 Ready (MMC to MPI)(MMC-CPU1 レディ (MMC から MPI へ ))
MMC-CPU1 Ready (MMC to OPI, standard link)(MMC-CPU1 レディ (MMC から
OPI へ,標準リンク)
)
NC からの信号 (NC → PLC)
データブロック
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
MMC CPU が準備完了で,NCK. に周期的に信号を送っている。
信号ステータス 0 あるいは
信号遷移 1 → 0
MMC の準備ができていない。
アプリケーション例
"MMC CPU Ready" = 0 であれば,PLC ユーザプログラムは必要な処理を行う。
参照
アラーム一覧(個々のアラームが発生し,診断アクションが可能になったときの
NC 制御について)
DB10
DBX108.6
611D Ready(611D レディ)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
存在するすべてのドライブは,ドライブレディステータス信号を送信する(軸イン
タフェース信号の要約は "DRIVE" レディ)。
信号が有効となる最初の SW バージョン:1.1
1-47
DB10
DBX108.6
611D Ready(611D レディ)
データブロック
NC からの信号 (NC → PLC)
信号ステータス 0 あるいは ドライブの準備ができていないことがドライブから送信されたとき直ちに
(つまり IS "DRIVE ready" = 0)
。
信号遷移 1 → 0
この信号は次の場合は無意味 SINUMERIK FM-NC
関連性
IS "DRIVE ready" (DB31, ... DBX93.5)
DB10
DBX108.7
NC Ready(NC レディ)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは NC が準備完了。
信号遷移 0 → 1
このインタフェース信号はリレー接点 "NC Ready" のイメージである。
この信号は次の場合にセットされる。
• リレー接点 "NC Ready" が閉じている。
• NC 中のすべての電圧が確立されている。
• NC がサイクリックモードになっている。
信号ステータス 0 あるいは NC の準備ができていない。リレー接点 "NC Ready" が開いている。
信号遷移 1 → 0
次の障害が発生すると NC レディがキャンセルされる。
• 不足電圧あるいは過電圧監視が動作した。
• 個々のコンポーネントの準備ができていない (NCK CPU Ready)。
• NC CPU ウオッチドグ
信号 "NC ready" が 0 になれば,可能であれば NC は次の処理を行う。
• サーボイネーブルのキャンセル(ドライブが停止する)
。
• PLC 基本プログラムは次の処理を行う。
- NCK から PLC へのステータス信号(ユーザインタフェース)がリセットされる。
- 補助ファンクション用の変更信号が削除される。
- PLC から NCK のユーザインタフェースへの周期的な処理が行われなくなる。
詳細については以下を参照。
電源がオンするがオンになるまでは NC は準備完了とならない。
関連性
リレー接点 "NC Ready"
参照
アラーム一覧
1.15 基本的 PLC プログラム
DB10
DBX109.0
NCK alarm is active(NCK アラームがアクティブ)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは 少なくとも一つの NCK アラームが存在している。
信号遷移 0 → 1
これは,存在する全チャンネルのインタフェース信号「チャンネル別 NCK アラー
ムがアクティブ」(DB21, ... DBX36.6) のグループ信号である。
信号ステータス 0 あるいは NCK アラームはアクティブではない。
信号遷移 1 → 0
関連性
IS "Channel-specific NC alarm is active" (DB21, ... DBX36.6)
IS "NCK alarm with processing stop is active" (DB21, ... DBX36.7)
参照
アラーム一覧(個々のアラームが発生し,診断アクションが可能になったときの
NC 制御について)
1-48
DB10
DBX109.6
Air temperature alarm(空気温度アラーム)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
周囲温度あるいは空気温度監視が動作した。原因としては次が考えられる。
• 温度監視が周囲温度が高すぎる(約 60 ℃)ことを検出した。アラーム 2110
"NCK temperature alarm" が出る。
• モジュール冷却用の DC24 V ファンの速度監視が動作した。アラーム 2120 "NCK
fan alarm" が出る。
対策:ファンを交換する,および/またはファンを追加する。
温度エラーあるいはファンエラーが発生すると,顧客評価用に,インフィード
/再生フィードバックユニット中のリレー接点(端子 5.1 と 5.2,あるいは 5.1
と 5.3)が起動する。
信号ステータス 0 あるいは
信号遷移 1 → 0
温度およびファンは正常。
アプリケーション例
温度あるいはファン監視が動作すると,PLC ユーザプログラムが適切な処置を行
う。
関連性
温度エラーあるいはファンエラーが出ると,顧客による評価用に,インフィード
/再生フィードバクユニット中のリレー接点(端子 5.1 と 5.2,あるいは 5.1 と 5.3)
が起動する。
DB10
DBX109.7
NCK battery alarm(NCK バッテリアラーム)
データブロック
NC からの信号 (NC → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
NCK バッテリ電圧アラームが動作した。
信号ステータス 0 あるいは
信号遷移 1 → 0
バッテリ電圧は下限値より高い(正常な状態)
。
例外,エラー
メモリバックアップ不足によってデータが失われることのないように,NC の電源
を入れた状態で NCK バッテリを交換すべきである。
参照
アラーム一覧
/IAD/, SINUMERIK 840D, Installation and Start-up Guide
/IAG/, SINUMERIK 810D, Installation and Start-up Guide
/IAF/, SINUMERIK FM-NC, Installation and Start-up Guide
信号が有効となる最初の SW バージョン:1.1
信号が有効となる最初の SW バージョン:1.1
原因としては次が考えられる。
• バッテリ電圧が予備警告リミット範囲に入った(約 2.7 ~ 2.9 V)。アラーム
2100 "NCK battery warning threshold reached" がでた。
影響と対策については以下を参照。
• バッテリ電圧が警告リミット範囲未満になった(≦ 2.6 V)。アラーム 2101
"NCK battery alarm" が周期的に出る。
影響:電源電圧不足のため(NC の電源が切られた場合など),バッテリでバッ
ク アップされているデータ(パートプログラムメモリ,変数,マシンデータな
ど)が失われる。
対策:参照をごらんください。
• NC の電源が投入されたときに,バッテリ電圧が警告リミット範囲未満(≦ 2.6
V)が検出される。
アラーム 2102 "NCK battery alarm" が出る。NC Ready も Mode Group Ready も出
力されない。
影響:バッテリでバックアップされているデータによってはすでに失われてい
る可能性がある。
対策:参照をご覧下さい。
1-49
■ 操作パネルとの間の信号
操作パネルへの信号
DB19, DBX0.1
DBX0.0
Screen bright(画面を明るくする)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
画面暗転がキャンセルされる。
信号ステータス 0 あるいは
信号遷移 1 → 0
画面暗転のまま。
信号が有効となる最初の SW バージョン:4.1
アプリケーション例
例外,エラー
関連性
DB19, DBX0.1
DB19, DBX0.1
DBX0.1
Darken screen(画面暗転)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
画面が PLC ユーザプログラムによって "dark" に切換えられている。
自動画面明暗ファンクションは無効(キーを押しても画面は明るくならない)。
信号ステータス 0 あるいは
信号遷移 1 → 0
画面が PLC ユーザプログラムによって "bright" に切換えられている。
この信号ステータスでは,NC による画面明暗ファンクションはキー操作でオーバ
ライドされる。MD 9006: DISPLAY_BLACK_TIME(画面暗転遅延)で設定された
時間内にキーが操作されないと画面が暗くなる。操作パネルのキーが押されると画
面が明るくなる。
アプリケーション例
スクリーンセーバー
例外,エラー
注意:
IS "Darken screen" (DB19, DBX0.1) が 1 にセットされていても,操作パネルのキー
ボードは使用可能な状態になっている。このため,IS "Key disable" (DB19, DBX0.2)
でキーボードもディスエーブルしておくことが望ましい。
関連性
IS "Key disable" (DB19, DBX0.2)
MD 9006: DISPLAY_BLACK_TIME (screen darkening delay time)
信号が有効となる最初の SW バージョン:2.1
1-50
DB19, DBX0.1
DBX0.2
Key disable(キーディスエーブル)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:2.1
信号ステータス 1 あるいは ユーザはキーを使えない。
信号遷移 0 → 1
信号ステータス 0 あるいは ユーザはキーを使用できる。
信号遷移 1 → 0
アプリケーション例
IS "Darken screen" (DB19, DBX0.1) で画面を暗くしている場合は,オペレータが誤っ
てコマンドを入力することがないように,IS "Key disable" (DB19, DBX0.2) でキー
ボードもディスエーブルしておくべきである。
関連性
IS "Darken screen" (DB19, DBX0.1)
DB19, DBX0.1
DBX0.7
Actual value in WCS(WCS での実際値)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:2.1
信号ステータス 1 あるいは PLC はワーク座標系 (WCS) で実際値を表示する。
信号遷移 0 → 1
このため,マシンエリアが選択されると,WCS 表示が常にアクティブとなる。つま
り,"Position" ウィンドウが WCS でマシン軸と特別軸,およびそれらの実際位置と
移動距離を表示する。
インタフェース信号はマシン基本表示がコールされたときにしか評価されないの
で,オペレータは,ソフトキー "Actual values MCS" と "Actual values WCS" を使用し
て,必要な頻度でマシンエリア内で 2 つの座標系 (WCS と MCS) を切換える必要が
ある。
信号ステータス 0 あるいは マシンエリアが選択されると,以前に選択されていた座標系 (WCS あるいは MCS)
が再選択されて表示される。
信号遷移 1 → 0
アプリケーション例
IS "Actual value in WCS" (DB19, DBX0.7) = 1 を適用して,オペレータがマシンエリア
に入るたびに,ワーク座標系画面 (WCS) が選択されるようにすることができる。
関連性
IS "Switch over MCS/WCS" (DB19, DBX20.7)
参照
YS840DI ユーザーズマニュアル・操作編
操作パネルからの信号
DB19, DBX0.1
DBX20.1
Screen is dark(画面が暗い)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:2.1
信号ステータス 1 あるいは 画面が暗くなる。
信号遷移 0 → 1
信号ステータス 0 あるいは 画面は暗くならない。
信号遷移 1 → 0
アプリケーション例
この IS によって,PLC は画面が IS "Darken screen" (DB19, DBX0.1) あるいは MD
9006: DISPLAY_BLACK_TIME(画面暗転遅延)で暗くなるかどうかを判断する。
関連性
MD 9006: DISPLAY_BLACK_TIME(画面暗転遅延)
1-51
DB19, DBX0.1
DBX20.7
Switch over MCS/WCS(MCS/WCS の切換え)
データブロック
NC への信号 (PLC → MMC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
座標系がワーク座標系 (WCS) から機械座標系 (MCS),あるいは MCS から WCS に
切替わる。この信号はセットされると 1 PLC サイクルだけアクティブになる。
信号ステータス 0 あるいは
信号遷移 1 → 0
影響なし。
アプリケーション例
切換えを行うには,IS "Switch over MCS/WCS/WKS" (DB19, DBX20.7) を IS "Actual
value in WCS (DB19, DBX0.7) に伝達しなければならない。
関連性
IS "Actual value in WCS" (DB19, DBX0.7)
信号が有効となる最初の SW バージョン:2.1
■ チャンネル別信号
チャンネルへの信号
DB21, ...
DBX6.2
Delete distance-to-go (channel-specific)(移動距離削除(チャンネル別))
データブロック
チャンネルへの信号 (PLC → NC)
エッジ評価:あり
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
信号ステータス 0 あるいは
信号遷移 1 → 0
信号が有効となる最初の SW バージョン:1.1
移動距離削除(チャンネル別)
IS "Delete distance-to-go (channel-specific)" は,経路上の軸について AUTOMATIC
モードの場合にのみアクティブとなる。
このインタフェース信号の立上がりエッジのみがジオメトリグループ内の軸に影響
する。
これらの軸はランプ停止で停止し,移動距離が削除される。追従誤差は削除されな
い。次のプログラムブロックがスタートする。
したがって,位置決め軸は IS "Delete distance-to-go (channel-specific)" を無視する。
(注)IS "Delete distance-to-go" はプログラムブロックの滞在時間に影響しない。
影響なし。
この信号は次の場合は無意味 位置決め軸
アプリケーション例
外部信号(probe など)によってトラベル動作を終了させる場合。
例外,エラー
"Delete distance-to-go (channel-specific)"
軸が IS "Delete distance-to-go" で停止した場合は,新しい位置で次のプログラムブロ
クが準備される。このため,"Delete distance-to-go" が発行された後は,ジオメトリ
軸はパートプログラムで最初に定義されていた輪郭とは異なった輪郭を描くことに
なる。
"Delete distance-to-go" が発行された後で,G90 がブロック中にプログラムされた場合
は,少なくともプログラムされた絶対位置にまではアプローチ可能であるが,G91
を使用した場合は,パートプログラムで最初に定義された位置には到達しない。
関連性
IS "Delete distance-to-go (axis-specific)" (DB31, ... DBX2.2)
1-52
チャンネルからの信号
DB21, ...
DBX36.6
データブロック
Channel-specific NCK alarm is active
(チャンネル別の NCK アラームがアクティブ)
チャンネルからの信号 (NCK → PLC)
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
少なくとも一つの NCK アラームがこのチャンネルに存在する。
グループインタフェース信号 "NCK alarm is active" もセットされる (DB10,
DBX103.0)。
PLC ユーザプログラムは,NCK チャンネル (IS "NCK alarm with processing stop
active") が理由で問題のチャンネルの処理が中断されたかどうかを知ることができ
る。
信号ステータス 0 あるいは
信号遷移 1 → 0
このチャンネルでは NCK アラームはアクティブになっていない。
関連性
IS "NCK alarm with processing stop is active" (DB21, ... DBX36.7)
IS "NCK alarm is active" (DB10, DBX103.0)
参照
アラーム一覧
DB21, ...
DBX36.7
データブロック
NCK alarm with processing stop is active
(処理停止を伴う NCK アラームがアクティブ)
チャンネルからの信号 (NCK → PLC)
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
このチャンネルで実行中のパートプログラムの処理停止を招く NCK アラームが少
なくとも 1 つアクティブになっている。
信号ステータス 0 あるいは
信号遷移 1 → 0
処理停止を招くアラームはこのチャンネルではアクティブになっていない。
アプリケーション例
このアラームによって,NCK アラームが原因のプログラム中断を PLC ユーザプロ
グラムは直ちに認識することができ,必要な対策がとれる。
関連性
IS "Channel-specific NC alarm is active" (DB21, ... DBX36.6)
参照
アラーム一覧
1-53
■ 送り軸/スピンドル別信号
送り軸/スピンドルへの信号
DB31, ...
DBX1.3
Axis/spindle disable(送り軸/主軸ディスエーブル)
データブロック
送り軸/主軸への信号 (PLC → NC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
- 送り軸ディスエーブル
信号が有効となる最初の SW バージョン:1.1
(試験状態)
IS "Axis disable" が出力されると,この軸についての位置指令は位置コントローラ
には出力されなくなる(図 1.7 を参照)。軸移動もディスエーブルされる。位置制
御ループは閉のままとなり,追従誤差はゼロにされる。
軸がディスエーブルされた状態で指令されると,軸は実際には移動しないが,実
位値表示は指令位置を表示し,実速度表示は指令速度を表示する。
RESET は,実位置表示をマシンの本当の値にセットする。
移動指令はこの軸について PLC に出力され続ける。
このインタフェース信号が再びキャンセルされると,関連する軸は再び通常に移
動できるようになる。
インタフェース信号「送り軸ディスエーブル」が移動中の軸についてセットされ
ると,その軸はランプ停止する。
- 主軸ディスエーブル
信号ステータス 0 あるいは
信号遷移 1 → 0
送り軸ディスエーブルと同様に,IS "Spindle disable" がセットされると,開ループ
制御モードでは速度指令が速度コントローラに出力されなくなり,位置決めモー
ドでは位置指令が位置コントローラに出力されなくなる。このため,主軸動作が
ディスエーブルされる。
速度実際値表示は速度指令値を表示する。
このインタフェース信号が再びキャンセルされると,関連するスピンドルは再び
通常に移動できるようになる。
主軸回転中にインタフェース信号「主軸ディスエーブル」がセットされると,主
軸はその加速特性にしたがって停止する。
(通常状態)
位置指令値は位置コントローラに周期的に伝達される。速度指令値は速度コント
ローラに周期的に伝達される。
「送り軸/主軸ディスエーブル」信号のキャンセル信号(1 → 0 への変化)は,送
り軸/主軸が静止してから有効となる(補間位置は適用されない)。
図 1.7
補間器からの
位置指令
モータ
位置コン
トローラ
軸ディス
エーブル
アクティブ
アプリケーション例
速度コン
トローラ
電流コン
トローラ
エンコーダ 1
実位置
インタフェース信号「送り軸ディスエーブル」と「主軸ディスエーブル」は,新
規 NC プログラムを試験するときに使用する。マシン軸と主軸は移動あるいは回
転動作を行わない。
1-54
DB31, ...
DBX1.3
Axis/spindle disable(送り軸/主軸ディスエーブル)
データブロック
送り軸/主軸への信号 (PLC → NC)
例外,エラー
信号「送り軸/主軸ディスエーブル」が特定の送り軸/主軸についてアク
ティブになっていれば,インタフェース信号 "Controller enable","Feedrate/
spindle hold" および "Hardware limit switch" は送り軸/主軸のブレーキングに
影響を与えない。しかし,送り軸/主軸を「フォローアップ」あるいは
「ホールド」ステータスにすることはできる(インタフェース信号 "Followup mode" を参照)。
(注)
• この信号はドライブへの指令出力を禁止する。
• 即座に移動軸を停止させることができる。軸はこのブロック中では再び
動くことはできない(次のブロックに到達した場合)
。
• この軸に対する次の移動指令で再同期が自動的に行われる(軸は残りの
移動距離だけ移動する)
。
• 例:
G0 X0 Y0
,
G1 F1000 X100 ; X20 で,"Disable axis" 信号が一瞬適用される
; X 軸は静止したままで,NC は補間を続行する
Y100
;
X200
; X は 20 から 200 まで移動する
次の動作は同期モード(SW4 以降)の場合に適用される。
参照:2.13 「主軸同期 (S3)」
• FS/FA 用の結合が起動した場合はこの信号は無効となる。→ No. 6
• LS/LA 用の信号がイネーブルされると,これも FS/FA に作用する。→ No.
7
• 2 つのスピンドル間にクランプされたワーク(表面加工から裏面加工への
ワーク転送)は破壊されることはない。
No.
イネーブル : 1
結合
挙動
ディスエーブル : 0
LS/LA
FS/FA
関連性
1
0
0
off
軸の指令は出力される
2
0
1
off
FS/FA 用の指令は出力されな
い
3
1
0
off
LS/LA 用の指令は出力され
ない
4
1
1
off
LS/LA と FS/FA 用の指令は
出力されない
5
0
0
on
軸の指令は出力される
6
0
1
on
FS/FA についてはディスエー
ブルは無効
7
1
0
on
FS/FA についてはディスエー
ブルは無効
8
1
1
on
LS/LA と FS/FA 用の指令は
出力されない
IS "Program test active" (DB21, ...DBX33.7)
1-55
DB31, ...
DBX1.4
Follow-up mode(フォローアップモード)
データブロック
軸/スピンドルへの信号 (PLC → NC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1
送り軸/主軸についてフォローアップモードが PLC によって選択されている。
信号が有効となる最初の SW バージョン:1.1
ドライブについてサーボイネーブルがキャンセルされた場合は,位置指令値が実位値
を基準にして連続的に補正される。
フォローアップモードがアクティブになると,IS "Follow-up mode active" (DB31, ...
DBX61.3) が直ちに "1" にセットされる。
実際値が連続して取得され更新される。送り軸/主軸が外乱によって現在位置から外
れても,ゼロ速度およびクランプ監視はエラーを発行しない。
「サーボイネーブル」が再びセットされると,その後の送り軸/主軸動作はすべて新し
い実位置からスタートする。
NC によって移動距離削除が起動されることに注意すること。
詳細については 1.1.2 の「■軸 / スピンドルへのインタフェース信号」を参照。
信号ステータス 0
フォローアップモードが選択されていない(ホールド)
「サーボイネーブル」がキャンセルされると,そのときの位置指令値が自動的に保存さ
れる。
このときに送り軸/主軸が位置ずれを起こしていると,位置指令値と実位置との間に
追従誤差が発生する。「サーボイネーブル」を発行すると前の指令位置が復元され,追
従誤差がゼロになる。
他のすべての軸動作は「サーボイネーブル」がキャンセルされる前に有効であった指
令位置からスタートする。
再び位置制御がオンになると,軸位置の指令値へのジャンプが発生する可能性がある。
ゼロ速度監視とクランプ監視はアクティブのままになる。ゼロ速度監視をオフにする
には,軸がクランプされているときに IS "Clamping active" をセットすべきである。
IS "Follow-up mode active" は「ホールド」状態で 0 にセットされる。
アプリケーション例
主軸(位置制御されている場合):
主軸に対して IS "Servo enable" がセットされていれば,通常は前の指令位置へ再び接近
することはない。主軸に対し,IS "Follow-up mode" は 1 にセットされなければならな
い。こうすることによって,IS "Servo enable" がセットされても指令位置へのジャンプ
が発生することはなくなる。
例外,エラー
障害が原因でドライブのサーボイネーブルが内部的にキャンセルされた場合は,次の
ことに注意すること:
発生したアラームが正しくキャンセルされた後で(つまりサーボイネーブルが内部的
に再発行されると)
,NC がスタートする前に「ホールド」が起動する (IS "Follow-up
mode" = 0)。
そうでない場合は,前の NC ブロック移動は,内部「移動距離削除」が理由で,フォ
ローアップモードが選択されている状態では NC スタートで実行されない。このこと
は,この軸が移動する予定の NC ブロックが直ちに完了することを意味する。
注意:
「フォローアップ」ステータスから「ホールド」ステータスに切換わるとき,および
サーボモード(サーボイネーブル信号をリリースした状態)のときは,NC 内部で移動
距離削除コマンドが起動する。このため,たとえば,この軸だけが移動するような NC
ブロックは直接停止する。
関連性
IS "Servo enable" (DB31, ... DBX2.1)
IS "Clamping in progress" (DB31, ... DBX2.3)
IS "Follow-up mode active"(DB31, ... DBX61.3)
1-56
DB31, ...
DBX1.5 and 1.6
Position measuring system 1 (PMS1)(位置検出器 1 (PMS1))
Position measuring system 2 (PMS2)(位置検出器 2 (PMS2))
データブロック
送り軸/主軸への信号 (PLC → NC)
エッジ評価:なし
信号更新:周期的
PMS1:信号ステータス 1
PMS2:信号ステータス 2
位置検出器 1 が送り軸/主軸に使用される(たとえば,位置制御,絶対値計算,表
示)。位置検出器 2 もインストールされている場合は (MD 30200: NUM_ENCS = 2),
この実際値も獲得される。
PMS1:信号ステータス 2
PMS2:信号ステータス 1
位置検出器 2 が送り軸/主軸に使用される(たとえば,位置制御,絶対値計算,表
示)。位置検出器 1 が使用できる場合は,この実際値も獲得される。
PMS1:信号ステータス 1
PMS2:信号ステータス 1
送り軸/主軸の位置制御に両方の位置検出器を同時に使用することはできないの
で,NC は自動的に位置検出器 1 を選択する。位置検出器 2 も存在する場合は,この
実位置も獲得される。
PMS1:信号ステータス 2
PMS2:信号ステータス 2
1) 軸がパーキング 位置にある場合は次が適用される。
信号が有効となる最初の SW バージョン:1.1
• 両方の位置測定系がアクティブでなくなる。
• 実位値は獲得されない。
• 位置検出器監視はオフになる(たとえばエンコーダのケーブル接続)。
• 原点は意味をなさない(インタフェース信号 "Referenced/synchronized" の信号ス
テータスが 0)
。
軸が「パーキング」状態になると,インタフェース信号 "Position controller active"
(DB31, ... DBX61.5),"Speed controller active" (DB31, ... DBX61.6) および "Current
controller active" (DB31, ... DBX61.7) はすべて "0" にセットされる。
パーキング後は,軸は再度原点化されなければならない(原点復帰)。
軸が移動中にインタフェース信号 PMS1 と PMS2 が 0 にセットされると,軸はラン
プ停止で停止し,サーボイネーブルが内部的にキャンセルされる。
このことは,次の場合に推奨される。
• 主軸エンコーダがある速度以上になると出力しなくなる(パルスを送信しなくな
る)場合。
• この速度に対応できないために,主軸エンコーダが機械的に取外されている場
合。
スピンドルは速度制御モードで運転を続行することができる。送り軸/主軸を実際
に停止させるには,PLC によってサーボイネーブルが必ずキャンセルされなければ
ならない。
2) スピンドルは位置検出器を持っておらず,速度制御しかされていない。
この場合には IS "Servo enable" が 1 にセットされなければならない。
1-57
DB31, ...
DBX1.5 and 1.6
Position measuring system 1 (PMS1)(位置検出器 1 (PMS1))
Position measuring system 2 (PMS2)(位置検出器 2 (PMS2))
データブロック
送り軸/主軸への信号 (PLC → NC)
アプリケーション例
1) 位置検出器 1 から位置検出器 2 への切換え(およびその反対)
軸が両方の検出器で原点設定され,使用されるエンコーダの限界周波数を途中で超
えなければ(つまり,IS "Referenced/ Sychronized 1 and 2" (DB31, ... DBX60.4 and 60.5)
が "1" の場合),他のエンコーダに切換えられた後も軸を再度原点設定する必要はな
い。
切換え後に,位置検出器 1 と位置検出器 2 との間の実際の差分が直ちに確認される。
公差範囲を MD 36500: ENC_CHANGE_TOL(実位置切換え時の最大公差)中にプロ
グラムすることができる。この場合,切換え時の 2 つの実際位置の差は信用できな
い。実際位置の差が公差よりも大きければ,2 つの測定系間の切換えは行われず,ア
ラーム 25100 "Measuring system switchover not possible" が出る。詳細については,
ファンクション説明 G2,
「速度,指令/実際値系,閉ループ制御」を参照。
2) パーキング軸(つまり PMS がアクティブでない)
エンコーダを取外さなければならない場合,たとえば,回転テーブルをマシンから
外す必要がある場合,位置検出器監視はパーキング位置でオフにされる。
アプリケーションによっては送り軸/主軸エンコーダがあまりにも急速に回転する
ため,エンコーダが電気特性(エッジ傾斜など)を維持できないことがある。
3) エンコーダをオフにする
検出器 1 あるいは 2 をオフにすると,関連するインタフェース信号 "Referenced/
synchronized 1 (or 2)" がリセットされる。
4) 原点復帰
軸の原点復帰が選択された位置測定系を使用して実行される。各 PMS は別個に基準
化されなければならない。
例外,エラー
ステータス "Parking axis" がアクティブであれば,この軸のインタフェース信号
"Referenced/synchronized" は NC スタート時に無視される。
関連性
IS "Referenced/Synchronized 1" (DB31, ... DBX60.4)
IS "Referenced/Synchronized 2" (DB31, ... DBX60.5)
IS "Speed controller active" (DB31, ... DBX61.6)
IS "Servo enable" (DB31, ... DBX2.1)
MD 36500: ENC_CHANGE_TOL ( 実位置切替えにおける最大許容値)
MD 30200: NUM_ENCS ( エンコーダ数 )
参照
1.8 位置指令単位と検出単位 (G2)
1-58
DB31, ...
DBX2.1
Servo enable(サーボイネーブル)
データブロック
送り軸/主軸への信号 (PLC → NC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1
送り軸/主軸の位置制御ループが閉じられる(送り軸/主軸は閉ループ制御される)
。
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは 「サーボイネーブル」が PLC ユーザプログラムによってセットされると:
信号遷移 0 → 1
• 軸の位置制御ループが閉じる。
• 実位置が位置指令値に切換えられなくなる。
• ドライブのサーボイネーブルが出力される。
• IS "Position controller active" が 1 にセットされる。
「サーボイネーブル」が発行されると,フォローアップモード時に軸検出器の最大
許容限界周波数が超えられなければ,軸の新たな実位置値同期化(原点復帰)は必
要ない。
IS "Follow-up mode" (DB31, ... DBX1.4) ステータスの一つのファンクションとして,
軸を最初に前の指令位置に戻す(つまり,クランププロセスで生じた位置ずれをな
くす)かどうかを選択できる(IS "Follow-up mode" を参照)
。
信号遷移 1 → 0 あるいは信 「サーボイネーブル」がキャンセルされる。
号ステータス 0
「サーボイネーブル」をキャンセルする手順は,ジオメトリグループの送り軸/主
軸あるいは軸が静止しているか移動中であるかによって異なる(図 1.5 を参照)。
• 軸/スピンドルが静止している場合:
- 軸の位置制御ループが開く。
- IS "Follow-up mode" = 1 のときに,実位置値が位置指令値に切換わる(つまり指令
位置が実位置に合わせられる)。NC は送り軸/主軸の位置値を引続き獲得する。
- ドライブのサーボイネーブルがキャンセルされる。
- インタフェース信号 "Position controller active","Speed controller active" および
"Current controller active" が "0" にセットされる。
• 送り軸/主軸が移動中の場合:
- 軸が急停止で停止する。
- アラーム 21612 "VDI signal servo enable reset during movement" が発せられる。
- 送り軸/主軸の位置制御ループが開く。
- ブレーキングが終了すると,IS "Follow-up mode" とは無関係に,実位置が位置指令
値に切換えられる(つまり,指令位置が実位置に合わせられる)。NC は引続き送り
軸/主軸の実位置を獲得する。「フォローアップモード」がセットされる。
- インタフェース信号 "Position controller active","Speed controller active" および
"Current controller active" が "0" にセットされる。
軸ステータスは RESET されるまでは変更できない。
アプリケーション例
• 軸をクランプするときにサーボイネーブルを使用する
軸がクランプ位置に位置決めされる。軸は停止すると直ちにクランプされ,サー
ボイネーブルがキャンセルされる。サーボイネーブルをキャンセルする理由は,
キャンセルしないと,クランピングによって機械的に軸が多少位置ずれを起こし
たときに,位置コントローラが無理にその位置ずれを修正しようとするからであ
る。
クランピングを停止する場合は,まずサーボイネーブルが再びセットされ,次に
軸がクランピング状態から解放される。
例外,エラー
• サーボイネーブルせずに送り軸/主軸を移動させようとすると,送り軸/主軸は
静止したままで移動指令を PLC(軸のみ)に送信する。移動指令は維持されて,
サーボイネーブルが起動されたときに実行される。
• 移動中のジオメトリ軸のサーボイネーブルがキャンセルされると,プログラムさ
れた指令形状は維持できなくなる。
• マシン,位置検出器,あるいは NC で発生する障害によっては,サーボ制御が内
部的にキャンセルされる(詳細については 1.1.2 「■軸 / スピンドルへのインタ
フェース信号」を参照)。
1-59
DB31, ...
DBX2.1
Servo enable(サーボイネーブル)
データブロック
送り軸/主軸への信号 (PLC → NC)
関連性
IS "Follow-up mode active" (DB31, ... DBX61.3)
IS "Follow-up mode" (DB31, ... DBX1.4)
IS "Position controller active" (DB31, ... DBX61.5)
IS "Speed controller active" (DB31, ... DBX61.6)
IS "Current controller active" (DB31, ... DBX61.7)
MD 36620: SERVO_DISABLE_DELAY_TIME(スイッチオフ遅延サーボイネーブル)
MD 36610: AX_EMERGENCY_STOP_TIME(エラー発生時のブレーキングランプ時間)
DB31, ...
DBX2.2
データブロック
エッジ評価:あり
Delete distance-to-go (axis-specific)/spindle reset
(移動距離削除(軸別)/主軸リセット)
送り軸/主軸への信号 (PLC → NC)
信号が有効となる最初の SW バージョン:1.1
信号更新:周期的
信号ステータス 1 あるいは 移動距離削除(軸別)
信号遷移 0 → 1
運転モードによって,次のいずれかが「移動距離削除軸」に発生する。
• JOG:ある軸に対してインタフェース信号がセットされていれば(信号遷移 0->1)
,その軸はランプ停止で停止し,その移動距離が削除される。追従誤差は削
除されない。
• AUTOMATIC および MDA:インタフェース信号の立上がりエッジは,ジオメト
リグループに入っていない軸に対してのみ影響する。これらの軸はランプ停止で
停止し,移動距離が削除される。
この後は次のプログラムブロックがスタートできる。
ジオメトリ軸は IS "Delete distance-to-go axial" を無視する。
(注)IS "Delete distance-to-go" はプログラムブロック中のドウェル時間 には影響し
ない。
信号ステータス 0 あるいは 影響なし
信号遷移 1 → 0
アプリケーション例
外部信号(probe など)によりトラベル動作を終了させる場合。
例外,エラー
"Delete distance-to-go (axial)"
• "Delete distance-to-go" で軸が停止した後で,次のプログラムブロックが新しい位
置で準備される。このようにして軸は,"Delete distance-to-go" 後は,パートプロ
グラムで最初に定義された形状とは異なった形状を描くことになる。
"Delete distance-to-go" 後に G90 がブロック中にプログラムされた場合は,少なく
ともプログラムされた絶対位置にはアプローチできる。G91 を使用した場合は,
パートプログラムで以前に定義した位置には到達できない。
関連性
IS "Delete distance-to-go (channel-specific)" (DB21, ... DBX6.2)
参照
1.17 主軸機能 (S1)
1-60
DB31, ...
DBX9.0, 1, 2
データブロック
Controller parameter set switchover (request)
(コントローラパラメータセット切換え(リクエスト))
Requested parameter set(リクエストされたパラメータセット)
送り軸/主軸への信号
エッジ評価:なし
信号更新:リクエスト時
信号が有効となる最初の SW バージョン:4.1
信号ステータス 1 あるいは 信号遷移 0 → 1
信号ステータス 0 あるいは 信号遷移 1 → 0
この信号は次の場合は無意 MD 35590: $MA_PARAMSET_CHANGE_ENABLE = 0
味
アプリケーション例
起動するパラメータセットのバイナリインデックスは 3 ビットで保存される。
0 は第 1 パラメータセットに対応している。
1 は第 2 パラメータセットに対応している(同様に最大で 6 個のパラメータセット
まで可能)
。
例外,エラー
インデックス 6 ~ 7 はパラメータセット 6 上にイメージされる。
関連性
DB31, ...DBX69.0, 1, 2
DB31, ...
DBX20.0
Ramp-up times(ランプアップ時間)
データブロック
送り軸/主軸への信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは V/Hz モードが MD 1014: U/F_MODE_ENABLE で起動される。
信号遷移 0 → 1
MD 1126: U/F_MODE_RAMP_TIME_2 でセットされた時間が有効。
信号ステータス 0 あるいは V/Hz モードが MD 1014: U/F_MODE_ENABLE で起動される。
信号遷移 1 → 0
MD 1125: U/F_MODE_RAMP_TIME_1 でセットされた時間が有効。
関連性
MD 1014: U/F_MODE_ENABLE (V/Hz モード起動 )
MD 1125: UF_MODE_RAMP_TIME_1(V/Hz モード用のランプアップ時間 1)
MD 1126: UF_MODE_RAMP_TIME_2(V/Hz モード用のランプアップ時間 2)
参照
DB31, ...
DBX20.1
Ramp-function generator rapid stop(ランプファンクション発生器急停止)
データブロック
送り軸/主軸への信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブ について PLC が急停止を出す。速度セットポイント 0 が定義される。ド
ライブはランプファンクションを使用せずに停止する(回生制動)
。
ドライブモジュールが急停止を認識すると,IS "Ramp function generator rapid stop
active" (DB31, ... DBX92.1) が直ちに PLC に戻される。
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブについて PLC は急停止をリクエストしていない。
関連性
IS "Ramp function generator rapid stop active" (DB31, ... DBX92.1)
信号が有効となる最初の SW バージョン:1.1
参照
1-61
DB31, ...
DBX20.2
Torque limit 2(トルクリミット 2)
データブロック
軸/スピンドルへの信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
軸/スピンドルについて,PLC がトルクリミット 2 をリクエストしている。
ドライブ では各軸/スピンドルについて 2 つのトルクリミット値がセットできる。
トルクリミット 2 はトルクリミット 1 (減少係数)を参照する。トルックリミット
2 はインタフェースを介して選択される。各リミット値は,ドライブパラメータを
使用して定義される。
ドライブについてトルクリミット 2 がアクティブになると,ドライブは IS "Torque
limit 2 active" (DB31, ... DBX92.2) を直ちに出力する。
信号ステータス 0 あるいは
信号遷移 1 → 0
トルクリミット 1 のみ PLC によって選択されている。
アプリケーション例
マシンとワークに対するストレスを減少させるために,特定の加工オペレーショ
ンについてトルクリミット 2 を使用して 現在のトルクリミットを下げることがで
きる。
関連性
IS "Torque limit 2 active" (DB31, ... DBX92.2)
信号が有効となる最初の SW バージョン:1.1
参照
DB31, ...
DBX20.3
Speed setpoint smoothing(速度指令平滑化)
データブロック
軸/スピンドルへの信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
PLC が速度指令値を平滑化するためにフィルタをリクエストしている。
信号ステータス 0 あるいは
信号遷移 1 → 0
PLC は速度指令値の平滑化をリクエストしていない。
アプリケーション例
このインタフェース信号を使用すれば,滑らかなトルクカップリングを達成するた
めに,速度制御中に,特定の主軸について PLC ユーザプログラムから速度指令平
滑化を起動することができるし,滑らかなトルクカップリングの実現が可能にな
る。主軸が位置決めモードになると,速度指令平滑化は停止することができる。
信号が有効となる最初の SW バージョン:1.1
ドライブモジュール中では,インタフェース信号は次の条件の下でのみ有効となる。
• 速度指令フィルタ 1 がドライブ中でアクティブ。
• 速度指令フィルタ 1 がローパスフィルタとして構成されている(ノッチフィルタ
としてではなく)
。
これらの条件が満足され,速度指令フィルタファンクションが起動すると,直ちに
ドライブ は IS "Speed setpoint smoothing" (DB31, ... DBX92.3) を PLC に送信する。
例外,エラー
関連性
IS "Speed setpoint smoothing active" (DB31, ... DBX92.3)
参照
1-62
DB31, ...
DBX21.0 to 21.2
Drive parameter set selection A, B, C(ドライブパラメータセット選択 A,B,C)
データブロック
軸/スピンドルへの信号
エッジ評価:なし
信号更新:周期的
意味
ビットの組合わせ A,B,C を使用して,8 つの異なったドライブパラメータセッ
トをドライブ について選択できる。
信号が有効となる最初の SW バージョン:1.1
次の割当てが適用される。
C
B
A
1
0
0
0
2
0
0
1
3
0
1
0
4
0
1
1
5
1
0
0
6
1
0
1
7
1
1
0
8
1
1
1
ドライブパラメータセット
新しいドライブパラメータセットがアクティブになると,ドライブは PLC に対し
て直ちにインタフェース信号 "Active drive parameter set" (DB31, ... DBX93.0,1 and 2)
を送信する。
アプリケーション例
ドライブパラメータ切替えは次の目的で使用できる。
• ギア切換え
• 測定回路切換え
例外,エラー
原則として,ドライブパラメータセットはいつでも切換えることができる。パラ
メータは送り軸/主軸が静止している(特に軸が静止している)場合にのみ切換
えるべきである。
関連性
IS "Active drive parameter set" (DB31, ... DBX93.0,1 and 2)
参照
1-63
DB31, ...
DBX21.3 and 21.4
Motor selection A, B(モータ選択 A,B)
データブロック
送り軸/主軸への信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
意味
PLC はモータ選択で主速巻線を切換えることができる。
信号が有効となる最初の SW バージョン:1.1
次の割当てが適用される。
アプリケーション
B
A
モータ 1
MSD:低速巻線
0
0
モータ 2
MSD:高速巻線
0
1
モータ 3
予備
1
0
モータ 4
予備
1
1
モータ選択
低速巻線と高速巻線を切換えて起動電流を減らすために,主軸ドライブ (MSD) に
モータ選択を使用することができる。ドライブは,インタフェース信号 "Active
motor" (DB31, ... DBX93.3 and 4) で現在どのモータが選択されているかを PLC に伝
える。
アプリケーション例
例外,エラー
関連性
高速巻線 / 低速巻線
(注)新しく巻線を選択するときには,まず IS "Motor selection in progress" を "0"
にセットしなければならない。
IS "Active motor" (DB31, ... DBX93.3 and 4)
IS "Motor selection in progress" (DB31, ... DBX21.5)
参照
DB31, ...
DBX21.5
Motor selection in progress(モータ選択中)
データブロック
軸/スピンドルへの信号 (PLC →ドライブ )
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
外部コンタクタが新しい巻線に切換えられた(たとえば,低速/高速切替えプロ
セスの一部としてモータコンタクタ 2 が切換えられた)ことを確認するために,
PLC は IS "Motor selection in progress" をドライブに送信する。
信号ステータス 0 あるいは
信号遷移 1 → 0
新しい巻線が選択される前に,IS "Motor selection in progress" は PLC ユーザプログ
ラムによって "0" にリセットされなければならない。
関連性
IS "Active motor" (DB31, ... DBX93.3 and 4)
IS "Motor selection A, B" (DB31, ... DBX21.3 and 4)
信号が有効となる最初の SW バージョン:1.1
参照
1-64
DB31, ...
DBX21.6
Speed controller integrator disable(速度コントローラ積分器ディスエーブル)
データブロック
軸/スピンドルへの信号 (PLC → ドライブ )
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
このインタフェース信号は 主軸ドライブ上の速度コントローラ積分器をディス
エーブルする。このため,速度コントローラは PI コントローラから P コントロー
ラに切替わる。
注記:速度コントローラ積分器ディスエーブルが起動されると,アプリケーショ
ンによっては(静止中に積分器がすでに負荷をホールドしている場合など)等化
プロセスが発生することがある。
積分器が正しくディスエーブルされたことを確認応答するため,611D は IS
"Integrator speed controller disabled" (DB31, ... DBX93.6) を PLC に送信する。
信号ステータス 0 あるいは
信号遷移 1 → 0
速度コントローラの積分器はイネーブルされている。
関連性
IS "Speed controller integrator disabled" (DB31, ... DBX93.6)
信号が有効となる最初の SW バージョン:1.1
参照
DB31, ...
DBX21.7
Pulse enable(サーボオン)
データブロック
軸/スピンドルへの信号 (PLC → 611D)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
サーボオンは PLC によってこのドライブ(軸/スピンドル)用にシグナリングさ
れる。
この場合,"1" にセットされたインタフェース信号 "Pulses enabled" (DB31, ...
DBX93.7) が PLC に転送される。
詳細については,IS "Pulses enabled" (DB31, ... DBX93.7) あるいは参照をご覧下さい。
信号ステータス 0 あるいは
信号遷移 1 → 0
パルスはこのドライブについて PLC によってディスエーブルされている。
アプリケーション例
安全に関連する信号。
例外,エラー
非常停止で移動中の軸/スピンドルについてパルスイネーブルがキャンセルされ
た場合は,その軸/スピンドルは惰性でのみ停止する。
関連性
IS "Pulses enabled" (DB31, ... DBX93.7)
信号が有効となる最初の SW バージョン:1.1
移動中の軸/スピンドルについてパルスイネーブルがキャンセルされた場合は,
その軸/スピンドルは制御しながら制動をかけることはできなくなる。軸は惰性
で停止する。
参照
1-65
■ 軸/スピンドルからの信号
DB31, ...
DBX61.3
Follow-up mode active(フォローアップモードアクティブ)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
NC が軸/スピンドルについてフォローアップモードがアクティブであることを示
している。
次の条件が満足されなければならない。
1. サーボイネーブルがドライブについてキャンセルされている(IS "Servo enable" =
0 で PLC によって,あるいは障害の場合は内部的に(参照をご覧下さい。)
),そし
て
2. フォローアップモードが選択されている(IS "Follow-up mode = 1" で PLC によっ
て,あるいは内部的に(たとえば,トラバース軸のサーボイネーブルがキャンセ
ルされたとき))
。
フォローアップモードがアクティブになっている間は,位置セットポイントは常
に実際値に合うように補正される。ゼロ速度およびクランピング監視はアクティ
ブではない。
信号ステータス 0 あるいは
信号遷移 1 → 0
NC が軸/スピンドルのフォローアップモードがアクティブでないことを示してい
る。
ゼロ速度およびクランピング監視がアクティブ。
上記の条件が満足されていない。「ホールド」ステータス中に IS "Follow-up mode
active" がリセットされている。
例外,エラー
注:"Follow up" から "Hold" (IS "Follow-up mode" = 0) に切替わったときか,あるい
は制御モード (IS "Servo enable" = 1) 中に,移動距離削除が内部的にトリガされる。
関連性
IS "Servo enable" (DB31,... DBX2.1)
IS "Follow-up mode" (DB31, ... DBX1.4)
参照
アラーム一覧
DB31, ...
DBX61.4
Axis/spindle stationary(軸/スピンドル静止)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
軸の現在の速度,あるいはスピンドルの現在の速度が,MD 36060:
STANDSTILL_VELO_TOL("Axis/spindle stationary" 信号用の最大速度)で定義さ
れたリミット未満で,NC からセットポイントが出力されていない。
信号ステータス 0 あるいは
信号遷移 1 → 0
軸の現在の速度,あるいはスピンドルの現在の速度が,MD (静止範囲)で指定さ
れた値を超えている。
スピンドルなどについてトラバースコマンドがアクティブであれば,現在の速度
が MD 36060: STANDSTILL_VELO_TOL で設定された値未満であってもこの信号
は常に "0" となる。
アプリケーション例
関連性
信号が有効となる最初の SW バージョン:1.1
信号が有効となる最初の SW バージョン:1.1
• 保護デバイスを開く(たとえばドアを開く)ためのイネーブル信号。
• スピンドルが静止している場合に限って,ワークピースチャックあるいはツー
ルクランプデバイスを開く。
• スピンドルが停止したならば,ギアステージチェンジ中に揺動モードをオンに
することができる。
• ツールクランプデバイスが閉じてからでないと,スピンドルを最大速度まで加
速することができない。
MD 36060: STANDSTILL_VELO_TOL (maximum velocity/speed for signal "Axis/spindle
stationary")
1-66
DB31, ...
DBX61.5
Position controller active(位置コントローラアクティブ)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
その軸あるいはスピンドルについて位置コントローラが閉じていることを知らせ
る。
信号ステータス 0 あるいは
信号遷移 1 → 0
その軸あるいはスピンドルについて位置コントローラが開いていることを知らせ
る。
障害が原因かあるいは PLC ユーザプログラムによって "Servo enable" がキャンセ
ルされると,位置コントローラが開いて,信号 "Position controller active" が "0" に
リセットされる。
位置制御をしていないスピンドル:信号 "Position controller active" は常に "0"。
信号が有効となる最初の SW バージョン:1.1
その他の影響に関しては関連資料を参照。
アプリケーション例
• 位置制御がアクティブであれば,軸/スピンドルは位置コントローラによって
正しい位置に保たれる。
ブレーキあるいはクランプは開にすることができる。
• IS "Position controller active" を IS "Servo enable" に対するリターン信号として使
用できる。
• 位置制御がアクティブでなくなれば,垂直軸の保持ブレーキを直ちに起動しな
ければならない。
• スピンドルは,技術的に可能であればスピンドルとパートプログラム中
(SPCON または M71 を使用して)で位置制御モードの軸として動作することが
可能である。
この場合には,インタフェース信号 "Position controller active" がセットされる。
例外,エラー
シミュレーション軸 (MD 30350: SIMU_AX_VDI_OUTPUT = "1") についての特殊な
場合:
MD = "1" となると,インタフェース信号 "Position controller active" が同時軸につい
て直ちにセットされる。
関連性
IS "Servo enable" (DB31, ... DBX2.1)
IS "Follow-up mode" (DB31, ... DBX1.4)
IS "Position measuring system 1" and "Position measuring system 2" (DB31, ... DBX1.5
and 6)
参照
アラーム一覧(個々のアラームが発生し,診断アクションが可能になったときの
NC 制御について)
1-67
DB31, ...
DBX61.6
Speed controller active(速度コントローラアクティブ)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
その軸あるいはスピンドルについて速度コントローラが閉じていることを知らせ
る。
信号ステータス 0 あるいは
信号遷移 1 → 0
その軸あるいはスピンドルについて速度コントローラが開いていることを知らせ
る。
速度コントローラの出力がクリアされる。
アプリケーション例
スピンドルが位置制御されていない場合は,このインタフェース信号を "Servo
enable" のリターン信号として使用できる。
例外,エラー
シミュレーション軸 (MD 30350: SIMU_AX_VDI_OUTPUT = "1") の特殊な場合:
MD 30350: SIMU_AX_VDI_ 出力(シミュレーション軸用の軸信号の出力)= "1" と
なると,直ちにシミュレーション軸用にインタフェース信号 "Speed controller
active" もセットされる。
関連性
IS "Position controller active" (DB31, ... DBX61.5)
DB31, ...
DBX61.7
Current controller active(電流コントローラアクティブ)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
その軸あるいはスピンドルについて電流コントローラが閉じていることを知らせ
る。
信号ステータス 0 あるいは
信号遷移 1 → 0
その軸あるいはスピンドルについて電流コントローラが開いていることを知らせ
る。
電流コントローラ出力(電圧に関して操作された変数に対するフィードフォワー
ド量を含む)がクリアされている。
関連性
IS "Position controller active" (DB31, ... DBX61.5)
IS "Speed controller active" (DB31, ... DBX61.6)
DB31, ...
DBX69.0, 1, 2
Controller parameter set switchover (checkback) (コントローラパラメータセット
切換え(チェックバック)
)
Active parameter set(アクティブパラメータセット)
データブロック
信号が有効となる最初の SW バージョン:1.1
信号が有効となる最初の SW バージョン:1.1
軸/スピンドルからの信号 (NCK → PLC)
信号が有効となる最初の SW バージョン:4.1
エッジ評価:なし
信号更新:切換後
信号ステータス 1 あるいは
信号遷移 0 → 1
-
信号ステータス 0 あるいは
信号遷移 1 → 0
-
この信号は次の場合は無意味
MD 35590: $MA_PARAMSET_CHANGE_ENABLE = 0
アプリケーション例
起動されたパラメータセットの 2 進化インデックスは 3 ビットで保存される。
0 は第 1 パラメータセットに対応している。
1 は第 2 パラメータセットなどに対応している(最大で 6 個のパラメータセットま
で可能)
例外,エラー
MD 35590: PARA- SET_CHANGE_ENABLE = 0 で切換えファンクションが停止され
た場合はインデックス 0 が返される。
この場合は,第 1 パラメータセットが常にアクティブとなる。
1-68
DB31, ...
DBX69.0, 1, 2
データブロック
Controller parameter set switchover (checkback) (コントローラパラメータセット
切換え(チェックバック))
Active parameter set(アクティブパラメータセット)
軸/スピンドルからの信号 (NCK → PLC)
関連性
DB31, ...DBX9.0, 1, 2
DB31, ...
DBX76.0
Lubrication pulse(潤滑パルス)
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:あり
信号更新:変更時
信号が有効となる最初の SW バージョン:1.1
信号ステータス 1 あるいは If the axis has traversed a greater distance than set in MD 33050: LUBRICATION_DIST
(PLC からの潤滑のためのトラベル距離)でセットされている距離よりも多くの距
信号遷移 0 → 1
離を軸が移動すると,IS "Lubrication pulse" が 1 PLC サイクルだけセットされる。
信号ステータス 0 あるいは
信号遷移 1 → 0
1 PLC サイクル後に,IS "Lubrication pulse" は自動的に "0" にリセットされる。
アプリケーション例
軸用の潤滑ポンプを IS "Lubrication pulse" で起動することができる。このため,
ベッドの潤滑は常に移動したパスに依存する。
関連性
MD 33050: LUBRICATION_DIST(潤滑パルス距離)
DB31, ...
DBX92.0
Setup mode active(セットアップモードアクティブ)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブ についてセットアップモードがアクティブになっている。セットアップ
モードはインフィード/再生フィードバクモジュールの端子を介して選択される。
加工プロセスを最適化するためにセットアップモードが必要となる。
次の適応化と追加のファンクションが可能。
• ドライブ:
速度セットポイントリミットの減少
電流セットポイントリミットの減少
• I/R:スイッチオフ DC リンク電圧制御:
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブについて通常のオペレーションがアクティブになっている:このために
次のことが適用される:
• 速度および電流セットポイントについて最大リミット値がアクティブになって
いる。
• DC リンク電圧制御がアクティブになっている。
信号が有効となる最初の SW バージョン:1.1
この信号は次の場合は無意味
参照
1-69
DB31, ...
DBX92.1
+ データブロック
Ramp-function generator rapid stop active
(ランプファンクション発生器急停止アクティブ)
軸/スピンドルからの信号 ( ドライブ → PLC)
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ランプファンクション発生器急停止がアクティブであるとの信号を PLC が受信し
た。
このファンクションは IS "Ramp-function generator rapid stop" (DB31, ... DBX20.1) に
よって起動された。
このため,ドライブは,パルス抑制なしにランプファンクションを使用すること
なく,速度セットポイント "0" で停止する。
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブについて,ランプファンクション発生器急停止がアクティブになってい
ない。
この信号は次の場合は無意味
アプリケーション例
サーボ側でランプファンクション発生器の使用を取りやめる。
関連性
IS "Ramp-function generator rapid stop" (DB31, ... DBX20.1)
参照
DB31, ...
DBX92.2
Torque limit 2 active(トルクリミット 2 アクティブ)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブは,トルクリミット 1 に加えてトルクリミット 2 もアクティブであること
を PLC に知らせている。各リミット値はドライブパラメータで定義される。
信号ステータス 0 あるいは
信号遷移 1 → 0
トルクリミット 1 のみアクティブ。
信号が有効となる最初の SW バージョン:1.1
この信号は次の場合は無意味
関連性
IS "Torque limit 2" (DB31, ... DBX20.2)
参照
B31, ...
DBX92.3
Speed setpoint smoothing active(速度セットポイント平滑化アクティブ)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
IS "Speed setpoint smoothing" (DB31, ... DBX20.3) で PLC がリクエストした速度セッ
トポイントスムージングは現在アクティブである。
信号ステータス 0 あるいは
信号遷移 1 → 0
速度セットポイントスムージングはアクティブではない。
信号が有効となる最初の SW バージョン:1.1
この信号は次の場合は無意味
関連性
IS "Speed setpoint smoothing" (DB31, ... DBX20.3)
参照
1-70
DB31, ...
DBX93.0 - 93.2
データブロック
Active drive parameter set A, B, C
(アクティブドライブパラメータセット A,B,C)
軸/スピンドルからの信号 ( ドライブ → PLC)
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
意味
どのドライブパラメータセットが現在アクティブであるかを示す信号をドライブが
PLC に返している。
ビットの組合わせ A,B および C で,ドライブについて 8 つの異なったドライブパ
ラメータセットを選択できる。
次の割当てが適用される。
C
B
A
1
0
0
0
2
0
0
1
3
0
1
0
4
0
1
1
5
1
0
0
6
1
0
1
7
1
1
0
8
1
1
1
アクティブドライブパラメータ
セット
この信号は次の場合は無意
味
アプリケーション例
ドライブパラメータ切換えは次の場合に使用できる。
• ギヤ切換え
• 測定回路切換え
関連性
IS "Drive parameter set selection" (DB31, ... DBX21.0,1 and 2)
参照
IS "Drive parameter set selection" (DB31, ... DBX21.0,1 and 2)
DB31, ...
DBX93.3 and 93.4
Active motor A, B(アクティブモータ A,B)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
意味
ドライブは,どのモータ選択が現在アクティブかを示す信号を PLC に返している。
信号が有効となる最初の SW バージョン:1.1
次の割当てが適用される。
アプリケーション
B
A
モータ 1
MSD:スターモード
0
0
モータ 2
MSD:デルタモード
0
1
モータ 3
予備
1
0
モータ 4
予備
1
1
アクティブモータ
低速巻線と高速巻線を切換えて起動電流を少なくするために,メインスピンドル
ドライブ (MSD) にモータ選択を使用できる。
この信号は次の場合は無意味
関連性
IS "Motor selection" (DB31, ... DBX21.3 and 4)
IS "Motor selection in progress" (DB31, ... DBX21.5)
参照
1-71
DB31, ...
DBX93.5
Drive Ready(ドライブレディ)
データブロック
軸/スピンドルからの信号 ( ドライブ→ PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブが準備完了であることを示す確認応答がドライブから PLC に送られる。
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブは準備完了になっていない。
ドライブが次の理由でディスエーブルになっている(図 1.8 を参照)。
• イネーブル端子がない(たとえば,端子 63 "Servo and pulse enable" 端子 663 "Safe
operational stop",端子 64 "Setpoint enable")
信号が有効となる最初の SW バージョン:1.1
• ドライブアラームアクティブ(たとえば,モータ温度がスイッチオフしきい値
に達した)
• DC リンク電圧が低すぎる
• ドライブがまだサイクルオペレーションに到達していない。
• ハードウェア障害
• 位置測定系がアクティブになっていない("parking axis" ステータス)
• I/R がスイッチオンされていない
ドライブが準備完了になると,直ちにドライブが停止するか(パルスがディス
エーブルされるか急停止を伴う障害の場合),あるいはランプアップ中にパルス
ディスエーブルが維持される。
インタフェース信号 "Drive Ready" (DB10, DBX108.6),"Current controller active" およ
び "Speed controller active" もキャンセルされる。
この信号は次の場合は無意味
図 1.8
トリガ機器イネーブル
サーボおよびパルスイネーブル(端子 63)
パルスイネーブル(安全運転停止)
(端子 663)
保存されたハードウェア入力
「ドライブレディ」
&
セットポイントイネーブル(端子 64)
IS "Drive ready"
No. 611D アラーム
(ステータスクラス 1 エラー)
DC リンク接続
&
電源オン完了
「トラバース
ステータス
レディ」(端子 72/73)
関連性
IS "Drive Ready" (DB10, DBX108.6)
IS "Current controller active" (DB31, ... DBX61.7)
IS "Speed controller active" (DB31, ... DBX61.6)
参照
1-72
DB31, ...
DBX93.6
データブロック
Speed controller integrator disabled(速度コントローラ積分器ディスエーブル)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
IS "Speed controller integrator disable" (DB31, DBX21.6) で PLC によってリクエストさ
れた速度コントローラの積分器の分離はこのドライブモジュールについてアク
ティブ。
速度コントローラは PI 制御から P 制御に切替わる。
信号ステータス 0 あるいは
信号遷移 1 → 0
速度コントローラの積分器はイネーブルされている。速度コントローラは PI コン
トローラとして機能する。
軸/スピンドルからの信号 ( ドライブ→ PLC)
信号が有効となる最初の SW バージョン:1.1
この信号は次の場合は無意味
関連性
IS "Speed controller integrator disabled" (DB31, ... DBX21.6)
参照
DB31, ...
DBX93.7
Pulses enabled(パルスイネーブル)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブモジュールのパルスイネーブルが起動している。軸/スピンドルはトラ
バースできる。
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブモジュールのパルスは抑制されている。このために,軸/スピンドルはト
ラバースできない。
パルスはイネーブル信号がなくなれば直ちに抑制される(図 1.10 を参照)。
また,"Servo enable of drive" がサーボからキャンセルされると,ドライブはセット
ポイント "0" で停止する(回生制動)
。この場合,ドライブモジュール中でタイマ
が起動し,プログラムされた時間 (MD 1404: PULSE_SUPPRESSION_DELAY) が経
過した後でディスエーブルとなる。実際の速度がこの時間 (MD 1403:
PULSE_SUPPRESSION_SPEED) の時間内にクリープ速度に達したならばら,パル
ス抑制が直ちにトリガされる。
速度が速度しきい値 (MD 1403: PULSE_SUPRESSION_SPEED) 以下で,ドライブ
サーボイネーブル信号がキャンセルされた場合は,パルス抑制が直ちにトリガされ
る。
位置測定系が存在しないと("Parking axis" ステータス)と,サーボが報告してきた
場合にもパルス抑制がトリガされる。
パルスが抑制されると,インタフェース信号 "Current controller active" と "Speed
controller active" も直ちにリセットされる。
信号が有効となる最初の SW バージョン:1.1
この信号は次の場合は無意味
1-73
DB31, ...
DBX93.7
Pulses enabled(パルスイネーブル)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
図 1.9
ドライブモジュール用の
パルスイネーブル
NC
PLC IS
PLC IS
パルスイネーブル
パルスイネーブル
中央パルスイネーブル
(端子 63)
PE(ソフトウェア)
PE(ハードウェア)
パルスイネーブル
「安全運転停止(端子 663)
」
611D ドライ
ブモジュール
PE = パルスイネーブル
I/R = インフィード/回生フィードバックモジュール
関連性
IS "Pulse enable" (DB31, ... DBX21.7)
MD 1404: PULSE_SUPRESSION_DELAY
MD 1403: PULSE_SUPRESSION_SPEED
参照
DB31, ..
DBX94.0
Motor temperature warning(モータ温度警告)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブモジュールが "Motor temperature warning" を PLC に送信する。この場合,
定義された警告しきい値 (MD 1602: MOTOR_TEMP_WARN_LIMIT ((最大モータ
温度))
;初期設定 120°C)をモータ温度が超えている(図 1.10 ② を参照)
。
モータ温度がこのレベルのままであると,定義された時間(ドライブ MD 1603:
MOTOR_TEMP_ALARM_TIME(タイマモータ温度アラーム,初期値 240 s)後に
回生制動がかかり,パルスがディスエーブルされる(図 1.10 ② を参照)
。また,
アラーム 300614 が起動して IS "Drive Ready" がキャンセルされる。
モータ温度が上昇を続け,定義されたカットアウトしきい値 (MD 1607:
MOTOR_TEMP_SHUTDOWN_LIMIT(カットアウトしきい値モータ温度,初期設
定 155 ℃)に達すると,ドライブは直ちにシャットダウンする(図 1.10 ② を参
照)。アラームが出力され,IS "Drive Ready" がキャンセルされる。
しかし,モータ温度が十分早い時期に警告しきい値まで下がると,IS は "0" にリ
セットされる(図 1.10 ② を参照)
。
例外:
温度センサ信号が検出されなかった場合は,モータ PTC サーミスタの障害と判断
される。この場合は,IS "Motor temperature prewarning" がセットされ,上記のよう
に処理される。
信号が有効となる最初の SW バージョン:1.1
1-74
DB31, ..
DBX94.0
Motor temperature warning(モータ温度警告)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
信号ステータス 0 あるいは
信号遷移 1 → 0
モータ温度が警告しきい値未満。
現在のモータ温度が軸/スピンドルサービス画面のオペレーションエリア「診断
(Diagnosis)」に表示される。この表示は MD 1702: MOTOR_TEMPERATURE(モー
タ温度)に対応している。
この信号は次の場合は無意味
図 1.10
モータ温度
アラーム
アラーム
スイッチオフリミット
警告
警告しきい値
時間
時間
警告
警告
IS「モータ温度予備警告」
時間
アラーム
アラーム
IS「DRIVE レディ警告」
アプリケーション例
"Motor temperature warning" の信号が出ると,たとえば PLC はドライブの制御され
たシャットダウンを直ちに開始することができる。
関連性
IS "DRIVE ready" (DB31, ... DBX93.5)
MD 1602: MOTOR_TEMP_WARN_LIMIT
MD 1603: MOTOR_TEMP_ALARM_TIME
MD 1607: MOTOR_TEMP_SHUTDOWN_LIMIT
参照
アラーム一覧
DB31, ...
DBX94.1
Heatsink temperature prewarning(ヒートシンク温度予備警告)
軸/スピンドルからの信号 ( ドライブ → PLC)
データブロック
信号が有効となる最初の SW バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
ドライブモジュールは警告 "Heatsink temperature prewarning" を PLC に送信する。こ
れによって次のことが起こる。
• インフィード/再生フィードバックモジュールの端子 5 が直ちにアクティブにな
る。
• ドライブモジュールが 20 秒後にスイッチオフされる。パルスイネーブルがキャ
ンセルされてドライブが停止する。ドライブアラーム 300515 が出る。
信号ステータス 0 あるいは
信号遷移 1 → 0
ドライブモジュールヒートシンク温度予備警告はでていない。
この信号は次の場合は無意味
SINUMERIK FM-NC
1-75
DB31, ...
DBX94.1
Heatsink temperature prewarning(ヒートシンク温度予備警告)
軸/スピンドルからの信号 ( ドライブ → PLC)
データブロック
アプリケーション例
"Heatsink temperature warning" 信号が出ると,たとえば PLC はドライブの制御され
たシャットダウンを直ちに開始することができる。
参照
アラーム一覧
DB31, ...
DBX94.2
Ramp-up complete(ランプアップ完了)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
信号が有効となる最初の SW バージョン:1.1
PLC は,実際の速度値が公差範囲 (MD 1426: SPEED_DES_EQ_ACT_TOL(n(set) =
n(act) 信号についての公差範囲)に達し,MD 1427: SPEED_DES_EQ_ACT_DELAY
(遅延 n(set) = n(act) 信号)に対応する時間だけ公差範囲内に留まったとの確認を受
信した(図 1.11 を参照)。
速度の実際値が公差範囲から外れたとしても(負荷が変化して速度が変動したため
に),信号 "Ramp-up procedure completed" はそのまま残る(ステータスは 1 のま
ま)。
信号ステータス 0 あるいは
信号遷移 1 → 0
上記の条件がまだ達成されていない。このため,ランプアッププロシージャはまだ
完了していない。
この信号は次の場合は無意味
図 1.11
ランプファンクション発生器
アクティブ(制御ワードサーボ)
アクティブ
アクティブでない
時間
速度セットポイント
速度
速度公差
範囲
速度の実際値 nact
IS "Ramp up procedure
completed"
時間
T < TD
T > TD
! 信号なし ! ディスエーブルされた信号
時間
T > TD
T > TD
! 信号なし ! 信号
! 信号
T < TD
時間
TD = MD 1427 : SPEED_DES_EQ_ACT_DELAY
1-76
DB31, ...
DBX94.2
Ramp-up complete(ランプアップ完了)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
関連性
IS "nact = nset " (DB31, ... DBX94.6)
IS "|MD| = Mdx " (DB31, ... DBX94.3)
MD 1426: SPEED_DES_EQ_ACT_TOL
MD 1427: SPEED_DES_EQ_ACT_DELAY
参照
DB31, ...
DBX94.
|Md| < Mdx
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
トルクセットポイント |Md| が静止状態の(つまりランプアップファンクション完
信号が有効となる最初の SW バージョン:1.1
了)しきい値トルク Mdx を超えていないと 611D は PLC に報告した(図 1.12 を参
照)
。
しきい値トルクは MD 1428: TORQUE_THRESHOLD_X(しきい値トルク)で現在
のトルクリミット値のパーセントとしてセットされる。トルクスレショルドは速度
によって変わる。
ランプアップ中,IS |Md| < Mdx は "1" のままになる。信号 |Md| < Mdx はランプアップ
完了 (IS "Ramp-up complete" = 1) 次第アクティブになり,トルクしきい値の信号
ディスエーブル時間(MD 1429: TORQUE_THRESHOLD_X_DELAY(遅延時間 nd <
ndx 信号)
)が切れる。
信号ステータス 0 あるいは
信号遷移 1 → 0
トルクセットポイント |Md| がしきい値トルク Mdx よりも大きい。
必要に応じて PLC ユーザプログラムがリアクションを起こす。
1-77
DB31, ..
DBX94.3
|Md| < Mdx
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
図 1.12
ランプファンクション発生器アクティブ(制御ワードサーボ)
アクティブ
アクティブ
でない
速度
時間
速度セットポイント
速度
公差
範囲
速度の実際値
n
set
時間
トルク
しきい値トルク 611D-MD:
TORQUE_THRESHOLD_X(JMdJ < Mdx の場合)
トルクセットポイント
Mdt
時間
IS "Ramp up procedure completed"
T < TD
T > TD
! 信号なし ! ディスエーブルされた信号
時間
ランプアッププロシージャ
中はアクティブのまま
TD - MD 1427: SPEED_DES_EQ_ACT_DELAY
TD2 - 1429: TORQUE_THRESHOLD_X_DELAY
関連性
IS "Ramp-up complete" (DB31, ... DBX94.2)
MD 1428: TORQUE_THRESHOLD_X
MD 1429: TORQUE_THRESHOLD_X_DELAY
MD 1427: SPEED_DES_EQ_ACT_DELAY
参照
1-78
時間
DB31, ...
DBX94.4
|nact| < nmin
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
報告した。最低速度は MD 1418: SPEED_THRESHOLD_MIN で定義されている。
信号が有効となる最初の SW バージョン:1.1
速度の実際値 nact が最低速度 nmin よりも低いことを SIMODRIVE 611D が PLC に
信号ステータス 0 あるいは
信号遷移 1 → 0
速度の実際値は最低速度よりも高い。
関連性
MD 1418: SPEED_THRESHOLD_MIN ( 最小速度 (nmin for nact < nmin ))
参照
DB31, ...
DBX94.5
|nact| < nx
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
速度の実際値 nact がしきい値速度 nx よりも低いことを SIMODRIVE 611D が PLC
に報告した。しきい値速度は MD 1417: SPEED_THRESHOLD_X で定義されてい
る。
信号ステータス 0 あるいは
信号遷移 1 → 0
速度の実際値はしきい値速度よりも高い。
関連性
MD 1417: SPEED_THRESHOLD_X ( しきい値速度 (nx for nact < nx))
信号が有効となる最初の SW バージョン:1.1
参照
1-79
DB31, ...
DBX94.6
nact = nset
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
新しい速度セットポイント入力を受けて,実際の速度値 nact が MD 1426:
SPEED_DES_EQ_ACT_TOL (nset = nact 信号の公差範囲)でセットされた速度公差
信号が有効となる最初の SW バージョン:1.1
範囲に到達し,MD 1427: SPEED_DES_EQ_ACT_DELAY(遅延時間 nset = nact 信号)
でセットされた時間以上は公差範囲内に留まったことを SIMODRIVE 611D は PLC
に報告した(図 1.12 を参照)
。
速度の実際値が公差範囲から外れると,IS "n(act) = n(set)" が "0" にリセットされる
("Ramp-up complete" はでない)。
信号ステータス 0 あるいは
信号遷移 1 → 0
上記の条件が満足されていない。速度の実際値が速度公差範囲から外れている。
図 1.12 を参照
関連性
IS "Ramp-up complete" (DB31, ... DBX94.2)
MD 1426: SPEED_DES_EQ_ACT_TOL
MD 1427: SPEED_DES_EQ_ACT_DELAY
参照
DB31, ...
DBX94.7
Variable signalling function(変数シグナリングファンクション)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1
信号が有効となる最初の SW バージョン:1.1
監視中の変数のしきい値が超えられたことをドライブが PLC に報告した。
変数シグナリングファンクションを使用すれば,パラメータ化できる変数はすべ
てドライブが各軸について監視できるので,決められたしきい値が超えられるこ
とがなくなり,結果が PLC に報告されるようになる。
監視中の変数のパラメータは次のマシンデータ中にセットされる。
• PROG_SIGNAL_FLAGS ( ビット変数信号ファンクション )
• PROG_SIGNAL_NR ( 信号番号変数信号ファンクション )
• PROG_SIGNAL_ADDRESS ( アドレス変数信号ファンクション )
• PROG_SIGNAL_THRESHOLD ( しきい値変数信号ファンクション )
• PROG_SIGNAL_HYSTERESIS( ヒステリシス変数信号ファンクション )
• PROG_SIGNAL_ON_DELAY (ON 遅延変数信号ファンクション )
• PROG_SIGNAL_OFF_DELAY (OFF 遅延変数信号ファンクション )
監視:
定められたしきい値が超えられていないかどうかパラメータ化された変数が監視
される。また,しきい値値が違反されていないかどうかをスキャンする場合に考
慮される公差範囲(ヒステリシス)を指定することもできる。信号 "Threshold
exceeded" は ON 遅延時間および OFF 遅延時間と組合わせることができる(図
1.13)。
選択:
監視する変数は,信号番号あるいは記号表記アドレスを入力することで選択でき
る。変数シグナリングファンクションは,MD 1620: PROG_SIGNAL_FLAGS ( ビッ
ト変数信号ファンクション ) で軸別に起動および停止ができる。しきい値値比較
に符号を付けるか付けないかも指定できる。
詳細については関連文書を参照。
1-80
DB31, ...
DBX94.7
Variable signalling function(変数シグナリングファンクション)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
信号ステータス 0
監視中の変数のしきい値値が超えられていないこと,および上記の条件が満足さ
れていないことをドライブが PLC に報告した。
変数シグナリングファンクションが停止すると (MD 1620:
PROG_SIGNAL_FLAGS),信号ステータス "0" が PLC に出力される。
図 1.13
公差範囲
MD 1624:
PROG_
SIGNAL_
HYSTERESIS
しきい値
MD 1623:
PROG_SIGNAL_
THRESHOLD
信号
「しきい値が超えら
れた」
ON 遅延時間
MD 1625: PROG_SIGNAL_ON_DELAY
OFF 遅延時間
MD 1626: PROG_SIGNAL_ON_DELAY
DB31, ...
DBX94.7
Variable signalling function(変数シグナリングファンクション)
データブロック
軸/スピンドルからの信号 ( ドライブ → PLC)
アプリケーション例
変数シグナリングファンクションを使用すると,工作機械メーカーは各軸/スピ
ンドルについての特定のアプリケーションについて一 1 つのしきい値値を新たに
監視し,PLC ユーザプログラム中でその結果を評価することができる。
例:モータトルクが定格トルクの 50 % を超えると,IS "Variable signal function" が
1 にセットされる。
関連性
MD 1620: PROG_SIGNAL_FLAGS ( ビット変数信号機能)
MD 1621: PROG_SIGNAL_NR ( 信号数変数信号機能 )
MD 1622: PROG_SIGNAL_ADDRESS ( アドレス変数信号機能 )
MD 1623: PROG_SIGNAL_THRESHOLD ( しきい値変数信号絹 )
MD 1624: PROG_SIGNAL_HYSTERESIS ( 遅れ変数信号機能 )
MD 1625: PROG_SIGNAL_ON_DELAY (ON 遅延変数信号機能 )
MD 1626: PROG_SIGNAL_OFF_DELAY (OFF 遅延変数信号機能 )
参照
1-81
DB31, ...
DBX95.0
データブロック
UDClink < warning threshold>(警告しきい値)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは
信号遷移 0 → 1
DC リンク電圧 U(DClink) が DC リンク不足電圧警告しきい値未満にまで下がった
ことをドライブが PLC に報告した。DC リンク不足電圧警告しきい値は MD:1604
LINK_VOLTAGE_WARN_LIMIT で定義される。
DC リンク不足電圧警告しきい値は,アプリケーションにもよるが,400 V より高
い電圧値として指定すべきである。DC リンク電圧が 280 V 未満にまで下がると,
ドライブはハードウェアによってスイッチオフされる。
信号ステータス 0 あるいは
信号遷移 1 → 0
DC リンク電圧 U(DClink) が DC リンク不足電圧警告しきい値よりも高い。
アプリケーション例
警告信号がでた場合は,PLC ユーザプログラムは加工を停止する(ツールを後退
させる)
,DC リンク電圧をバックアップするなどの対策をとることができる。
関連性
MD 1604: LINK_VOLTAGE_WARN_LIMIT ( 電圧下警告しきい値の DC リンク)
軸/スピンドルからの信号 ( ドライブ → PLC)
信号が有効となる最初の SW バージョン:1.1
参照
1-82
1.1.6 例
■ コントローラパラメータセット切換え
パラメータセットの例
マシン軸 AX1 の位置コントローラゲイン(サーボゲイン係数)を切換える必要が
あります。次の設定が行われます。
$MA_POSCTRL_GAIN [0, AX1] = 4.0
// パラメータに関するサーボゲイン設定
(set 1)
$MA_POSCTRL_GAIN [1, AX1] = 2.0
// パラメータに関するサーボゲイン設定
(set 2)
$MA_POSCTRL_GAIN [2, AX1] = 1.0
// パラメータに関するサーボゲイン設定
(set 3)
$MA_POSCTRL_GAIN [3, AX1] = 0.5
// パラメータに関するサーボゲイン設定
(set 4)
$MA_POSCTRL_GAIN [4, AX1] = 0.25
// パラメータに関するサーボゲイン設定
(set 5)
$MA_POSCTRL_GAIN [5, AX1] = 0.125 // パラメータに関するサーボゲイン設定
(set 6)
$MA_DRIVE_AX_RATIO_DENOM [0, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 1)
$MA_DRIVE_AX_RATIO_DENOM [1, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 2)
$MA_DRIVE_AX_RATIO_DENOM [2, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 3)
$MA_DRIVE_AX_RATIO_DENOM [3, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 4)
$MA_DRIVE_AX_RATIO_DENOM [4, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 5)
$MA_DRIVE_AX_RATIO_DENOM [5, AX1] = 3 // パラメータに関するデノミネータ
ロードギアボックス (set 6)
$MA_DRIVE_AX_RATIO_NUMERA [0, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 1)
$MA_DRIVE_AX_RATIO_NUMERA [1, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 2)
$MA_DRIVE_AX_RATIO_NUMERA [2, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 3)
$MA_DRIVE_AX_RATIO_NUMERA [3, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 4)
1-83
$MA_DRIVE_AX_RATIO_NUMERA [4, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 5)
$MA_DRIVE_AX_RATIO_NUMERA [5, AX1] = 5 // パラメータに関する数表示器
ロードギアボックス (set 6)
$MA_AX_VELO_LIMIT [0...5, AX1] // 各パラメータに関する設定 set*)
$MA_EQUIV_CURRCTRL_TIME [0..5, AX1]// 各パラメータに関する設定 set*)
$MA_EQUIV_SPEEDCTRL_TIME [0..5, AX1] // 各パラメータに関する設定 set*)
$MA_DYN_MATCH_TIME [0...5, AX1] // 各パラメータに関する設定 set*)
1-84
*) 適用される構文規則にしたがって,各パラメータセットについて行を別個に指
定する必要があります。
パラメータセット 1 が選択されています (DB31, DBB9, bit0...2 = 0)。パラメータ
セットに属する,インデックスが "0" のマシンデータはアクティブです。
有効なサーボゲインは 4.0 /s です。
$MA_POSCTRL_GAIN [0, AX1] = 4.0
$MA_DRIVE_AX_RATIO_DENOM [0, AX1] = 3
$MA_DRIVE_AX_RATIO_NUMERA [0, AX1] = 5
$MA_AX_VELO_LIMIT [0, AX1] = ...
$MA_EQUIV_CURRCTRL_TIME [0, AX1] = ...
$MA_EQUIV_SPEEDCTRL_TIME [0, AX1] = ...
$MA_DYN_MATCH_TIME [0, AX1] = ...
切換え
パラメータセット切換えがイネーブルされます。
$MA_PARAMSET_CHANGE_ENABLE [AX1]= 1 あるいは 2。第 4 パラメータセッ
トが PLC によって選択されました。
インタフェース:リクエスト
DB31, DBB9 (bits0...2) => 3:
...
マシン軸 AX1 用に第 4 パラメータセットが選択さ
れます。
パラメータセットは遅延時間後に切換えられま
す。パラメータセットに属する,インデックスが
"3" の MD はアクティブです。
$MA_POSCTRL_GAIN [3, AX1] = 0.5
$MA_DRIVE_AX_RATIO_DENOM [3, AX1] = 3
// 現在有効なサーボゲインは 0.5 /s
// 注意! 変更不可のデータは
// すべてのインデックスに関して
$MA_DRIVE_AX_RATIO_NUMERA [3, AX1] = 5
/ 等しくなければなりません
$MA_AX_VELO_LIMIT [3, AX1] = ...
$MA_EQUIV_CURRCTRL_TIME [3, AX1] = ...
$MA_EQUIV_SPEEDCTRL_TIME [3, AX1] = ...
$MA_DYN_MATCH_TIME [3, AX1] = ...
インタフェース:フィードバック
DB31, DBB69 (bits0...2) => 3:
...
マシン軸 AX1 用に第 4 パラメータセットが
フィードバックとして戻されます。
遅延時間後にパラメータセットが切換えられま
す。このパラメータセットに属するインデック
ス "3" の MD がアクティブです。
1-85
1.1.7 データフィールド,リスト
■ インタフェース信号
DB 番号
ビット,バイト
一般
NC から PLC への一般信号
10
56.4-56.7
名称
キースイッチ設定 0 ~ 3
NC から PLC への信号
10
103.0
MMC アラームアクティブ
10
104.7
NCK CPU レディ
10
108.2
MMC CPU1 レディ (MMC および MPI)
10
108.3
MMC CPU1 レディ (MMC および OPI,標準接続 )
10
108.6
ドライブレディ
10
108.7
NC レディ
10
109.0
NCK アラームアクティブ
10
109.6
空気温度アラーム
10
109.7
NCK バッテリアラーム
操作パネル別
操作パネルへの入出力信号
19
0.0
画面が明るい
19
0.1
画面暗転
19
0.2
キーディスエーブル
19
0.7
WCS での実際値
19
1.1
画面が暗い
19
1.7
MCS/WCS 切換え
PLC から NCK チャンネルへの信号
チャンネル別
21, ...
6.2
移動距離削除 ( チャンネル別 )
NCK チャンネルから PLC への信号
21, ...
36.6
チャンネル別 NCK アラームアクティブ
21, ...
36.7
前処理停止起動による NCK アラーム
軸/スピンドル別 PLC から軸/スピンドルへの信号
31, ...
1.3
軸/スピンドルディスエーブル
31, ...
1.4
フォローアップモード
31, ...
1.5
位置測定系 1
31, ...
1.6
位置測定系 2
31, ...
2.1
コントローライネーブル
31, ...
2.2
移動距離削除 ( 軸別 ) /スピンドルリセット
31, ...
9.0, 1, 2
パラメータセット切換え(リクエスト)
31, ...
20.0
ランプアップ時間
31, ...
20.1
ランプファンクション発生器急停止
31, ...
20.2
トルクリミット 2
31, ...
20.3
速度セットポイント平滑化
31, ...
21.0-21.2
ドライブパラメータセット選択 A,B,C
31, ...
21.3-21.4
モータ選択 A,B
31, ...
21.5
モータ選択
31, ...
21.6
積分器ディスエーブル n- コントローラ
31, ...
21.7
パルスイネーブル
1-86
参照
DB 番号
ビット,バイト
名称
参照
軸/スピンドルから PLC への信号
31, ...
61.3
フォローアップモードアクティブ
31, ...
61.4
軸/スピンドル静止
31, ...
61.5
位置コントローラアクティブ
31, ...
61.6
速度コントローラアクティブ
31, ...
61.7
パワーコントローラアクティブ
31, ...
69.0, 1, 2
パラメータセット切換え(フィードバック)
31, ...
74.0
潤滑パルス
31, ...
92.0
セットアップモードアクティブ
31, ...
92.1
ランプファンクション発生器急停止アクティブ
31, ...
92.2
トルクリミット 2 アクティブ
31, ...
92.3
速度セットポイント平滑化アクティブ
31, ...
93.0-93.2
アクティブドライブパラメータセット A,B,C
31, ...
93.3-93.4
アクティブモータ A,B
31, ...
93.5DRIVE
ドライブレディ
31, ...
93.6
積分器 n- コントローラディスエーブル
31, ...
93.7
パルスイネーブル
31, ...
94.0
モータ温度予備警告
31, ...
94.1
ヒートシンク温度予備警告
31, ...
94.2
ランプアップ処理完了
31, ...
94.3
|Md| < Mdx
31, ...
94.4
|nact | < nmin
31, ...
94.5
|nact | < nx
31,...
94.6
nact = nset
31, ...
94.7
変数信号ファンクション
31, ...
95.0
UDC link < 警告しきい値
■ マシンデータ
番号
識別子
名称
参照
一般 ($MN_ ... )
10350
FASTIO_DIG_NUM_INPUTS
アクティブな,デジタル NCK 入力バイト 2.1(A4)
の数
10360
FASTIO_DIG_NUM_OUTPUTS
アクティブな,デジタル NCK 出力バイト 2.1(A4)
の数 A4
10361
FASTIO_DIG_SHORT_CIRCUIT
デジタル入出力の短絡
11120
LUD_EXTENDED_SCOPE
プログラムグローバル変数 (PUD) の起動 PGA
チャンネル別 ($MC_ ... )
27800
TECHNOLOGY_MODE
チャンネル中のテクノロジ
28150
MM_NUM_VDIVAR_ELEMENTS
PLC 変数を書込むための要素の数
軸/チャンネル別 ($MA_ ... )
SIMU_AX_VDI_OUTPUT
シミュレーション軸用の軸信号の出力
33050
LUBRICATION_DIST
潤滑パルス距離
35590
PARAMSET_CHANGE_ENABLE
PLC からパラメータセットの定義可能
30350
1-87
1.8(G2)
番号
36060
識別子
STANDSTILL_VELO_TOL
名称
参照
36610
AX_EMERGENCY_STOP_TIME
エラーステータスの場合の制動ランプの 1.2(A3)
長さ
36620
SERVO_DISABLE_DELAY_TIME
スイッチオフ遅延サーボイネーブル
xxxxx
EXT_PROG_BUFFER_SIZE
一つのプログラムレベルについての
FIFO バッファのサイズ
xxxxx
NUM_EXT_PROG
NCK 中の "Process from external memory"
で同時に運転可能なプログラムレベルの
数
xxxxx
EXT_PROG_PATH
サブプログラムコール EXTCALL につい
ての外部プログラムパスの名称
軸/スピンドルが静止中の最大速度
ドライブマシンデータ ($MD_ ... )
PULSE_SUPPRESSION_SPEED
パルス抑制用のシャットオフ速度
/IAD/, /IAG/
1404
PULSE_SUPPRESSION_DELAY
パルス抑制時間
/IAD/, /IAG/
1417
SPEED_THRESHOLD_X
nact < nset 信号用の nx
/IAD/, /IAG/
1418
SPEED_THRESHOLD_MIN
nact < nset 信号用の nmin
/IAD/, /IAG/
1426
SPEED_DES_EQ_ACT_TOL
nset = nact 信号用の公差範囲
/IAD/, /IAG/
1427
SPEED_DES_EQ_ACT_DELAY
遅延時間 nset = nact 信号
/IAD/, /IAG/
1428
TORQUE_THRESHOLD_X
しきい値トルク
/IAD/, /IAG/
1429
TORQUE_THRESHOLD_X_DELAY
遅延時間 nd < ndx 信号
/IAD/, /IAG/
1602
MOTOR_TEMP_WARN_LIMIT
最大モータ温度
/IAD/, /IAG/
1603
MOTOR_TEMP_ALARM_TIME
モータ温度アラーム時間
/IAD/, /IAG/
1604
LINK_VOLTAGE_WARN_LIMIT
DC リンク不足電圧警告しきい値
/IAD/, /IAG/
1403
MMC マシンデータ (MM_ ... )
9000
LCD_CONTRAST
9001
DISPLAY_TYPE
モニタタイプ
9002
DISPLAY_MODE
外部モニタタイプ
9003
FIRST_LANGUAGE
前景言語
9004
DISPLAY_RESOLUTION
表示の分解能
9006
DISPLAY_BLACK_TIME
画面暗転時間
9010
SPIND_DISPLAY_RESOLUTION
スピンドル用の表示分解能
9200
USER_CLASS_READ_TOA
保護レベル,読取り,ツールオフセット,
一般
9201
USER_CLASS_WRITE_TOA
保護レベル,書込み,ツールオフセット,
一般
9203
USER_CLASS_WRITE_TOA_GEO
保護レベル,書込み,ツールジオメトリ
9205
USER_CLASS_WRITE_TOA_WEAR
保護レベル,書込み,ツール,摩耗データ
9209
USER_CLASS_WRITE_TOA_ADAPT
保護レベル,書込み,ツール,アダプタ
データ
9211
USER_CLASS_WRITE_ZOA
保護レベル,書込み,設定可能,ゼロオ
フセット
9212
USER_CLASS_READ_GUD_LUD
保護レベル,読取り,ユーザ変数
9213
USER_CLASS_WRITE_GUD_LUD
保護レベル,書込み,ユーザ変数
9215
USER_CLASS_OVERSTORE_HIGH
保護レベル,拡張,オーバストア
9217
USER_CLASS_WRITE_PRG_CONDIT
保護レベル,プログラム制御
9218
USER_CLASS_DRF_INPUT
保護レベル,DRF オフセット
コントラスト
1-88
番号
9220
識別子
USER_CLASS_WRITE_SEA
名称
保護レベル,書込み,設定データ
9221
USER_CLASS_READ_PROGRAM
保護レベル,読取り,パートプログラム
保護レベル,入力,パートプログラム
9222
USER_CLASS_WRITE_PROGRAM
9223
USER_CLASS_SELECT_PROGRAM
保護レベル,プログラム選択
9224
USER_CLASS_TEACH_IN
保護レベル,TEACH IN
9225
USER_CLASS_PRESET
保護レベル,PRESET
9226
USER_CLASS_CLEAR_RPA
保護レベル,削除,R パラメータ
9227
USER_CLASS_WRITE_RPA
保護レベル,書込み,R パラメータ
参照
■ システム変数
識別子
名称
$P_FUMB
未割当てのパートプログラムメモリ(フリーユーザメモリバッファ)
$A_DBB[n]
PLC 上のデータ ( データタイプ BYTE)
$A_DBW[n]
PLC 上のデータ ( データタイプ WORD)
$A_DBD[n]
PLC 上のデータ ( データタイプ DWORD)
$A_DBR[n]
PLC 上のデータ ( データタイプ REAL)
1-89
参照
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいは MMC 101/102/103 を有するシステムのオンラインヘルプ
1-90
1.2 送り軸監視機能及びプロテクションゾーン (A3)
1.2.1 概略説明
■ 軸監視機能
軸監視
オペレータとマシンを保護するため総合的な監視機構が設置されていなけばなり
ません。
監視機能には次のようなものがあります。
• モーション監視ファンクション
- 輪郭監視
- 位置決め監視
- ゼロ速度監視
- クランピング監視
- 速度指令監視
- 実際速度監視
- エンコーダ監視機能
• 静的限界の監視
- リミットスイッチ監視
- ワークエリアリミット
■ プロテクションゾーン
マシンとその機材の様々な要素(スピンドルチャック,ツールチェンジャ,ツー
ルサポート,テールストック,プローブ等)と,加工されるワークが誤った動作
をしないように,プロテクションゾーンを使って保護します(1.2.3 「補足条件」
参照)。
プロテクションゾーンの数
NCU 570, NCU 571, NCU 571.2, CCU1:
マシン関連プロテクションゾーンは最大 4 つまで
NCU 572, 573.2, CCU2:
マシン関連プロテクションゾーンとチャンネル別プロテクションゾーンは合計で
最大 10 まで
プロテクションゾーンは NC パートプログラム中で起動および停止します。
機械加工ブロックの最初に制御装置がパスを計算し,プロテクションゾーンを超
えないかどうか確認します。
オペレータのアクションによりプロテクションゾーン内に移動することができま
す。プロテクションゾーンがまた解除されるまで停止になります。
1-91
1.2.2 詳細説明
■ モーション監視機能
■ 輪郭監視
輪郭誤差
輪郭誤差は,位置制御ループの信号歪によって起こります。これには次のような
区別があります。
• 線形信号歪
これは次のような原因で起こります。
- 速度および位置コントローラの設定が最適でない。
- パスの作成に関連する送り軸のサーボゲイン係数の設定値が違う。
線形補間に関連する 2 つの軸のサーボゲイン係数が等しい場合,実際の点は
同じ輪郭上の指令に少し遅れて追従します。
サーボゲイン係数が等しくない場合,設定した輪郭と実際の輪郭との間にパ
ラレルオフセットが生じます。
- フィードドライブの動的応答が等しくない。
ドライブの動的応答が等しくない場合,特に輪郭の変化に対するパスのずれ
が起こります。2 つのフィードドライブの動的応答が等しくないと,正円が
楕円に変形します。
• 非線形信号歪
これは次のような原因で起こります。
- 機械加工エリア内で現在の制限が起動している。
- 設定速度制限が起動している。
- 位置制御ループ内部/外部のバックラッシ
輪郭誤差は,円形輪郭移動中のバックラッシと摩擦で起こります。
直線移動中は,位置制御ループ外部のバックラッシ,例えばフライス盤スピ
ンドルの傾斜等によって輪郭誤差が起こります。これによって実際の輪郭と
設定された輪郭との間にパラレルオフセットが発生します。直線の傾きが小
さいほど,オフセットが大きくなります。
- スライドガイドが非線形の摩擦動作をする。
追従誤差監視
機能
追従誤差監視機能の動作原理は,測定された追従誤差と,NC 位置指令から予め計
算された誤差とを常時比較することです。追従誤差を予め計算するため,フィー
ドフォワード制御を含めた位置制御力学をシミュレートするモデルが使用されて
います。
(負荷の変化によって)速度がわずかしか変動していないときに誤って監視機能が
応答することのないように,輪郭がどの程度までずれてもよいかを指定する公差
範囲が設けられています。
MD36400: CONTOUR_TOL (公差範囲輪郭監視)に入力された許容実際値偏差が
超えられると,アラームが出力され軸が停止します。
1-92
追従誤差
切削開始
CONTOUR_
TOL
追従誤差
加工開始
図 1.14 追従誤差監視
起動条件
追従誤差監視機能は,位置制御モードで次の対象に対してアクティブとなります。
• 直線軸および回転軸
• 位置制御スピンドル
• フィードフォワード制御あり/なし
• 加速プロセスおよび減速プロセス
• 定速相
• 連続した輪郭および不連続な輪郭(円形パス等)
追従誤差監視はフォローアップモードではアクティブとなりません。
補足
追従誤差監視機能は位置制御モードでは常にアクティブとなります。
働き
追従誤差の偏差が大きすぎる場合は次のような現象が現われます。
• アラーム 25050 "Contour monitoring" (輪郭監視)が出力される。
• 問題の軸 / スピンドルにブレーキがかかり,速度指令ランプにしたがって急停
止する(位置制御ループは開ループ)
。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)で設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,他軸
も追従誤差をゆるくして,急停止する(位置指令 = 一定)。
1-93
是非処置
• 公差範囲を広げます。
• 実際の "servo gain factor" (サーボゲイン係数)が MD 32200:
POSCTRL_GAIN[n] (サーボゲイン係数)に設定された所望のサーボゲイン係
数に相当していなければなりません。SINUMERIK FM-NC で
MD 32260: RATED_VELO (定格モータ速度)と
MD 32250: RATED_OUTVAL (定格出力電圧)とを調べます。
• 速度コントローラが最適であるかどうかを調べます。
• 軸が滑らかに動作しているかどうかを調べます。
• マシンデータの移動動作(フィードレートオーバライド,加速,最大速
度,.
..)を調べます。
• フィードフォワード制御のオペレーションでは
MD 32810: EQUIV_SPEEDCTRL_TIME (フィードフォワード制御用等価時定
数速度制御ループ)または
MD: 32800 EQUIV_CURRCTRL_TIME (フィードフォワード制御用等価時定数
電流制御ループ)を確認してください。
マシンデータの設定があまりに不正確な場合は,MD 36400: CONTOUR_TOL の
設定値を上げてください。
■ 位置決め監視機能
機能
指定時間内に軸を必要な位置に到達させるため,MD36020: POSITIONING_TIME
(時間遅延正確停止(微)でプログラムできるタイマが,モーションブロックの最
後(モーションの最後で,部分位置指令 = 0)にスタートし,タイマが切れると,
追従誤差が MD 36010: STOP_LIMIT_FINE (正確停止(微)
)の限界値未満に低下
したかどうかを確認します。
「正確停止(粗)
(微)」については以下を参照してください。
参照: 1.3 連続送り,イグザクトストップモードと先読み
(B1)
次の図は,位置決め,ゼロ速度,クランピングの各監視機能間における相互作用
を示すものです。
1-94
V または s
ゼロ速度監視および
クランピング監視の有効公差
実際値
インタフェース信号
「クランピング
アクティブ」
(DB31, ... DBX2.3)
セット
ポイント
正確停止(微)信号
正確停止(粗)信号
POSITIONING_TIME
図 1.15 位置決め,ゼロ速度,クランピング監視
起動条件
位置決め監視は,モーションブロックが終わると指令にしたがって常に起動され
ます。
この機能は以下について起動されます。
• 直線軸および回転軸
• 位置制御されたスピンドル
フォローアップモードでは位置決め監視機能はアクティブとなりません。
停止条件
プログラムされた "exact stop limit fine" (正確停止リミット(微)
)に達した場合,
あるいは,新しい部分位置指令 <>0 が出力された場合,("exact stop limit coarse"
(正確停止リミット(粗)
)にしたがって位置決めし,次にブロックチェンジする
場合)は,位置決め監視がゼロ速度監視に切換わります。
1-95
働き
位置決め視時間が経過しても "exact stop limit fine" (正確停止(微))の限界値に達
していない場合は,次のアクションが行われます。
• アラーム 25080 "Positioning monitoring" (位置決め監視)が出力される。
• 関連する軸/スピンドルが速度指令ランプにしたがって急停止する(位置制御
ループは開ループ)。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)に設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,追従
誤差をゆるくして,他軸も急停止する(位置部分指令のデフォルト= 0)
。
誤差の原因/是非処置
• 位置コントローラのゲインが低すぎる → 位置制御ゲインマシンデータ:
MD 32200: POSCTRL_GAIN[n] (サーボゲイン係数),
MD 32910:DYN_MATCH_TIME[n] (動的応答マッチングの時定数)を変更し
ます。
• 位置決めウィンドウ(正確停止(微))
,位置決め監視時間,および,位置制御
ゲインが連係していない → マシンデータ:MD 36010: STOP_LIMIT_FINE (正
確停止(微)),MD 36020: POSITIONIG_TIME ( 遅延正確停止(微)),MD
32200: POSCTRL_GAIN[n] (サーボゲイン係数)を変更します。
• ドリフトが大きすぎる(アナログドライブのみ)→ ドリフトを補正します。
参照: 2.5 補正機能 (K3)
概略的な指針
• 位置決めウィンドウが大きい → 最大位置決め監視時間を比較的短い値にでき
る。
• 位置決めウィンドウが小さい → 最大位置決め監視時間を比較的長くしなけれ
ばならない。
• 位置コントローラゲインが低い → 最大位置決め監視時間を比較的長くしなけ
ればならない。
• 位置コントローラゲインが高い → 最大位置決め監視時間を比較的短くしなけ
ればならない。
(注)位置決めウィンドウのサイズはブロックチェンジ時間に影響
します。選択した公差が小さいと,位置決め作業にかかる時
間が長くなり,次のコマンドが実行されるまでの時間が長く
なります。
1-96
■ ゼロ速度監視
機能
ゼロ速度監視機能には次のような機能があります。
• モーションブロックの最後に
(モーションの最後で,部分位置指令 = 0)追従誤差を監視し,
MD36040: STANDSTILL_DELAY_TIME (遅延ゼロ速度監視)にプログラムさ
れた時間内に MD36060: STANDSTILL_POS_TOL (ゼロ速度公差)の限界値に
到達するかどうか確認します。
• 位置決め動作の最後(正確停止(微)到達)に
位置決め監視がゼロ速度監視に切り換わります。この場合に,軸を監視して,
軸が所定位置から MD36030: STANDSTILL_POS_TOL (ゼロ速度公差)に設定
された距離以上外れていないかどうかを確認します。
ゼロ速度監視は「正確停止(微)」に到達し,MD: 36040
STANDSTILL_DELAY_TIME に設定された "Delay zero speed Monitoring" (遅延
ゼロ速度監視)がまだ動作している場合に起動します。
図 1.15 を参照。
起動条件
ゼロ速度監視は,"delay zero speed monitoring" (遅延ゼロ速度監視)終了後,また
は,"Exact stop fine" (正確停止(微))到達時に,新しい移動コマンドが出ていな
ければ,常時アクティブです。
この機能は以下について起動されます。
• 直線軸および回転軸
• 位置制御スピンドル
フォローアップモードではゼロ速度制御監視機能はアクティブとなりません。
働き
監視機能が応答すると,次の現象が現れます。
• アラーム 25040 "zero speed monitoring" (ゼロ速度監視)が出力される。
• 関連する軸/スピンドルが速度指令ランプにしたがって急停止する(位置制御
ループは開ループ)。
制動ランプ時間は
MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の制動ランプ期間)に
設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,他軸
も急停止して,追従誤差を減らす(位置部分指令のデフォルト= 0)。
1-97
誤差の原因/是非処置
• 位置コントローラのゲインが高すぎる(制御ループの動揺)→
コントローラゲインのマシンデータ MD 32200: POSCTRL_GAIN[] (サーボゲ
イン係数)を変更します。
• ゼロ速度ウィンドウが小さすぎる → マシンデータ
MD 36030: STANDSTILL_POS_TOL (ゼロ速度公差)を変更します。
• 軸が所定位置から機械的に押出される → 原因を是正します。
■ クランピング監視
機能
位置決め動作の完了時に軸を締めつける必要がある場合は,クランピング監視機
能を起動するために,IS "Clamping active" (クランピングアクティブ)(DB31, ...
DBX2.3) をセットすることができます。
これは,クランピングプロセス中,軸が,ゼロ速度公差を超えて設定位置から押
出されることがあるため,必要な場合もあります。軸が目標位置から移動する量
は MD 36050: CLAMP_POS_TOL (インタフェース信号クランピングアクティブの
クランピング公差)に設定されます。
図 1.15 を参照。
起動条件
クランピング監視はインタフェース信号 "Clamping active" (クランピングアクティ
ブ)で起動されます。クランピング中はゼロ速度監視が無効になります。
この機能は以下について起動されます。
• 直線軸および回転軸
• 位置制御されたスピンドル
フォローアップモードではクランピング監視機能はアクティブではありません。
働き
クランピング中,軸がクランピング公差を超えて所定位置から押出されると,次
の動作が起こります。
• アラーム 26000 "Clamping monitoring" (クランピング監視)が出力される。
• 関連する軸/スピンドルが速度指令ランプにしたがって急停止する (位置制御
ループは開ループ)。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)に設定される。
• その軸/スピンドルが他の軸/スピンドルの補間グループに割当てられている
場合は,追従誤差をゆるくして,急停止するまで他軸にもブレーキがかかる
(位置部分指令のデフォルト = 0)。
誤差の原因
• 軸が所定位置から機械的に押出される。
1-98
■ 速度指令監視
機能
設定速度監視は,ドライブの物理的限界値(アナログドライブでは速度指令の最
大電圧 10 V,デジタルドライブでは最大許容モータ速度)を超えたかどうかを調
べるのに使用します。
テストモードでは最大速度指令を下げて監視することもできます。
速度指令 [%]
(テストモードの場合)
図 1.16 速度指令監視
MD 36210: CTRLOUT_LIMIT[n] (最大設定速度)の指令についても違反していな
いかどうか監視されます。
MD 36220: CTRLOUT_LIMIT_TIME[n] (設定速度監視の遅延)を設定して,設定
速度監視機能が応答するまで設定速度が限界に留まる期間を定義することができ
ます。
速度指令は,位置制御の速度指令,フォワード補正量(フィードフォワード制御
がアクティブの場合)
,ドリフト補正(アナログドライブのみ)から構成されてい
ます。
フィードフォワード制御値
ドリフト値(アナログドライブのみ)
速度
コントローラへ
追従誤差
速度
指令監視
位置コントローラ
図 1.17 速度指令の計算
1-99
起動条件
設定速度監視は常時アクティブです。
この機能は以下について起動されます。
• 直線軸および回転軸
• 開ループ制御されたスピンドルおよび位置制御されたスピンドル
働き
最大速度指令を超え,遅延時間 (MD 36220: CTRLOUT_LIMIT_TIME[n]) を過ぎる
と,以下の動作が起こります。
• アラーム 25060 "Set speed limitation" (設定速度制限)が出力される。
• 問題の軸 / スピンドルにブレーキがかかり,速度指令ランプにしたがって急停
止する(位置制御ループは開ループ)。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)に設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,他軸
も追従誤差をゆるくして急停止する(位置部分指令のデフォルト = 0)。
誤差の原因/是非処置
• (SINUMERIK FM-NC の)タコジェネレータの補正が正しく行われていない,
あるいは,測定回路にエラー,ドライブに障害が起こった。
• 指令入力値が高すぎる(加速,速度,減速率)。
• 加工スペースに障害物がある(ツールが作業台に当たる等)→ 障害物を取除
く。
(注)設定された速度制限を使用すると制御ループが非線形になり
ます。一般にこれは,軸が設定速度制限内にあると,輪郭が
ずれる原因になります。
1-100
■ 実速度監視
機能
この機能は実速度が MD 36200: AX_VELO_LIMIT[n] (速度監視のスレッシュホー
ルド値)にプログラムされた許容限界値を超えていないかどうか監視します。
起動条件
実速度監視は,IS "Position measuring system 1 or 2" (位置測定系 1 または 2)(DB31,
... DBX1.5, DBX1.6) を介して選択されたアクティブな測定回路が実際値を表示して
いる場合,すなわち,リミット周波数未満で動作している場合はいつでも起動可
能です。
この機能は以下について起動されます。
• 直線軸および回転軸
• 開ループ制御されたスピンドルおよび位置制御されたスピンドル
働き
「速度監視スレッシュホールド値」を超えると,次の動作が起こります。
• アラーム 25030 "Actual velocity alarm limit" (実速度アラームリミット)が出力
される。
• 問題の軸/スピンドルにブレーキがかかり,速度指令ランプにしたがって急停
止する(位置制御ループは開ループ)
。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)で設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,他軸
も追従誤差をゆるくして急停止する(位置部分指令のデフォルト = 0)
。
是非処置
• スピードケーブルを調べます。
• 実際値を調べます。
• 位置制御方向を調べます。
• MD 36200: AX_VELO_LIMIT[n] (速度監視スレッシュホールド値)を調べま
す。
1-101
■ エンコーダ監視
■ エンコーダリミット周波数監視
機能
MD 36300: ENC_FREQ_LIMIT[n] (エンコーダリミット周波数)に入力された測定
系の許容リミット周波数を超えると,マシンと制御システムの位置同期(基準点)
が失われます。この時点で正確な位置制御は行えません。この状態は PLC に通知
されます。
起動条件
エンコーダリミット周波数監視機能はエンコーダのスイッチが入っていれば常時
アクティブです。
この機能は以下について起動されます。
• 直線軸および回転軸
• 開ループ制御されたスピンドルおよび位置制御されたスピンドル
働き
エンコーダのリミット周波数を超えると次の動作が起こります。
• IS "Encoder limit frequency exceeded 1 or 2" (エンコーダリミット周波数超過 1 ま
たは 2)(DB31, ... DBX60.2 or 60.3) がセットされる。
• スピンドルが速度閉ループ制御下で動作を続ける。
エンコーダ周波数が MD 36302: ENC_FREQ_LIMIT_LOW の設定値未満に下が
る値までスピンドルの速度が落ちると,スピンドルが自動的にエンコーダの参
照システムと再び同期をとる。
• 位置制御された軸の測定系がアクティブな間にリミット周波数を超えると,ア
ラーム 21610 "Frequency is exceeded" (周波数超過)が出される。
• 問題の軸/スピンドルにブレーキがかかり,速度指令ランプにしたがって急停
止する(位置制御ループは開ループ)。
制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エラー状態の
制動ランプ期間)に設定される。
• その軸/スピンドルが他の軸/スピンドルの補間に関連している場合は,他軸
も追従誤差をゆるくして急停止する(位置部分指令のデフォルト = 0)。
是非処置
• 軸停止後,位置制御装置が自動的に復帰します。
(注)問題の軸は基準化し直してください。
1-102
■ 起点位置監視
機能
起点位置監視は,位置実際値エンコーダの起点位置から次の起点位置までの間で
パルスが抜けていないかどうかを調べるのに使用します。監視が応答する前に登
録される起点位置エラーの最大数が MD 36310: ENC_ZERO_MONITORING[n] (起
点位置監視)に入力されます。
起動条件
監視は MD 36310: ENC_ZERO_MONITORING [n] を使って起動されます。
エンコーダのスイッチを入れる度に起点位置エラーの数を 0 から数え直します。
働き
• 測定系がアクティブの間に,MD 36310: ENC_ZERO_MONITIORING[n] に設定さ
れた起点位置エラー数に達した場合は,アラーム 25020 "Zero mark monitoring"
(起点位置監視)が出される。
問題の軸/スピンドルが速度指令ランプにしたがって急停止する(位置制御ルー
プは開ループ)
。制動ランプ時間は MD 36610: AX_EMERGENCY_STOP_TIME (エ
ラー状態の制動ランプ期間)に設定される。
その軸/スピンドルが他の軸/スピンドルの補間グループに割当てられている場
合は,追従誤差をゆるくして,急停止するまで他軸にもブレーキがかかる(特定
の部分位置指令 = 0)。
• 測定系が無効な間に,起点位置エラー数に達した場合は,アラーム 25021 "Zero
mark monitoring" (起点位置監視)が出される。
エラーの原因/是非処置
• MD:36300 ENC_FREQ_LIMIT [n] (エンコーダリミット周波数)の設定値が高
すぎる。
• エンコーダケーブルが損傷している。
• エンコーダまたはエンコーダ素子の不良
1-103
■ ハードウェアの障害と信号の不良
機能
アラーム 25000,25001 "Hardware fault" (ハードウェアの障害)と,アラーム
25010,25011 "Contamination of measuring system" (測定系の不良)の測定回路監視
機能は,測定系がアクティブの場合だけアクティブとなります。そのため,制御
装置を再始動しなくてもアクティブでない測定系のエンコーダを変更することが
できます。別の測定系に切換えてもこの 2 種類のエラーのどちらかがなくならな
い場合は,適当なアラームを動作させます。
(注)測定回路でハードウェアの障害が起こる場合は,IS
"Referenced/synchronized 1/2" (基準化/同期化 1/2)(DB31, ...
DBX60.4 or. DBX60.5) がキャンセルされます。すなわち,軸
を基準化し直す必要があるということです。
参照: アラーム一覧
1-104
■ 静的限界の監視
■ リミットスイッチ監視
可能なリミットスイッチ監視機能の概要
ハードウェア
リミットスイッチ
第 2 ソフトウェア
リミットスイッチ
(PLC によって起動)
第 1 ソフトウェア
リミットスイッチ
機械的
移動範囲の限界
非常停止
図 1.18 移動リミット
ハードウェアリミットスイッチ
機能
スライダがスライドベッドから外れないようにするため,どの軸にも各移動方向
にハードウェアリミットスイッチが 1 つずつあります。ハードウェアリミットス
イッチがオンになると,PLC が IS "Hardware limits switch plus/minus" (ハードウェ
アリミットスイッチプラス/マイナス)(DB31 ~ 48,DBX12.1 または DBX12.0) に
よってその旨を NC に知らせ,全軸の動作が停止します。
停止方法は MD 36600: BRAKE_MODE_CHOICE (ハードウェアリミットスイッチ
での減速動作)で選択できます。
起動条件
どのモードでも制御装置始動後,ハードウェアリミットスイッチ監視はアクティ
ブとなります。
1-105
働き
• いずれの方向でも,ハードウェアリミットスイッチを超えると,アラーム
21614 "Hardware limit switch + or - " (ハードウェアリミットスイッチプラスま
たはマイナス)が発生します。
• MD36600: BRAKE_MODE_CHOICE (ハードウェアリミットスイッチでの減速
動作)の設定にしたがって軸にブレーキがかかり停止します。
• 歩間軸のうち 1 軸がハードウェアリミットスイッチを超えた場合,他軸を
MD36600: BRAKE_MODE_CHOICE (ハードウェアリミットスイッチでの減速
動作)に従い停止します。
• アプローチ方向の方向キーが使用できなくなります。
処置
• モードグループをリセットします。
• 反対方向に(JOG モードで)動かします。
• プログラムを訂正します。
ソフトウェアリミットスイッチ
機能
これは,各軸の最大移動範囲を定めるのに使用します。
各マシン軸には 2 つのソフトウェアリミットスイッチ設定があり,これらは以下
のマシンデータにより,マシン軸に定義されます。
MD 36110: POS_LIMIT_PLUS (第 1 ソフトウェアリミットスイッチプラス)
MD 36100: POS_LIMIT_MINUS (第 1 ソフトウェアリミットスイッチマイナス)
MD 36130: POS_LIMIT_PLUS2 (第 2 ソフトウェアリミットスイッチプラス)
MD 36120: POS_LIMIT_MINUS2 (第 2 ソフトウェアリミットスイッチマイナス)
起動条件
• ソフトウェアリミットスイッチ監視は,原点復帰完了後から有効となります。
• ソフトウェアリミットスイッチの位置にアプローチできます。
• PRESET 後,本機能はアクティブになりません。原点復帰後,再度アクティブ
となります。
• 第 2 ソフトウェアリミットスイッチは,例えば,テールストックが所定位置に
旋回した場合,ワークエリアを減らすために,PLC からのインタフェース信号
"2nd software limit switch plus/minus" (第 2 ソフトウェアリミットスイッチ プラ
ス/マイナス)(DB31 ~ 48,DBX12.3 または 12.2) によって起動できます。こ
の変更は直ちに有効になります。第 1 ソフトウェアリミットスイッチ プラス
/マイナスは無効となります。
• ソフトウェアリミットスイッチ監視は無限に回転する回転軸,すなわち,MD
30310: ROT_IS_MODULO = 1 (回転軸とスピンドルのモジューロ変換)である
場合は動作しません。
1-106
働き
モードによって,ソフトウェアリミットスイッチアラーム時の応答が異なること
があります。
例 1:座標変換なし,重量動作なし,ソフトウェアリミットスイッチ変更なしの自
動モード
- ソフトウェアリミットスイッチアラームが発生するブロックは始まらな
い。前のブロックは正しく終了する。
例 2:座標変換のある自動モード
- 例 1 と同様の応答
- ソフトウェアリミットスイッチアラームが発生するブロックが始まる。
軸はリミットスイッチで停止する。
- 輪郭に関連する他の軸が減速し,プログラム輪郭が終了する。
例 3:重量動作のある自動モード
- ソフトウェアリミットスイッチアラームが発生するブロックが始まる。
重量動作を伴って移動中の軸,または重量動作を伴って移動していた軸
がリミットスイッチで停止する。
- 輪郭に関連する他の軸が減速し,プログラム輪郭が終了する。
例 4:座標変換なしの JOG モード
- 軸がソフトウェアリミットスイッチの位置で停止する。
例 5:座標変換のある JOG モード
- 軸がリミットスイッチで停止する。
- 変換に関連する他の軸が減速,停止する。
例 6:有効なソフトウェアリミットスイッチの変更
- ソフトウェアリミットスイッチを切換えたとき,現在の位置が新しいソ
フトウェアリミットスイッチ外にある場合は,軸が最大許容軸方向加速
度で減速する。
- 現在の位置が切換後のソフトウェアリミットスイッチ内にある場合は,
例 2 の手順となる。
1-107
応答
各モードで次のような応答が考えられます。
• ブロック先読み中に,軸のアプローチ位置がプラス/マイナスソフトウェアリ
ミットスイッチアラームとなることが分かった場合は,次のアラームのいずれ
かが発生する。
10720 "Software limit switch + or -" (ソフトウェアリミットスイッチプラスまた
はマイナス);例 1
10620 "Axis reached software limit switch + or -" (軸がソフトウェアリミットス
イッチプラスまたはマイナスに到達);例 2,3,6
• JOG モードでソフトウェアリミットスイッチの位置に到達し,さらにその方向
に移動するようにプログラムされている場合は,アラーム 10621 "Axis at
software limit switch + or -"(軸がソフトウェアリミットスイッチプラスまたは
マイナスにある)が発生する;例 4
• JOG モードでジオメトリ軸が移動する間,ジオメトリ軸のアプローチ予定位置がプ
ラス/マイナスソフトウェアリミットスイッチアラームとなることが分かった場
合は,アラーム 10620 "Axis reached software limit switch + or -" (軸がソフトウェア
リミットスイッチプラスまたはマイナスに到達)が発生する;例 5
• アラーム発生時,軸が減速する。補間軸のうち 1 軸がソフトウェアリミットスイッ
チを超えた場合,他軸も減速する。輪郭異常が発生する場合がある;例 2,3,5
• プログラムの処理が中止される;例 1,2,3
• ソフトウェアリミットスイッチへのアプローチ方向と同一方向の方向キーが使用で
きなくなる;例 1,2,3,4,5
是非処置
• モードグループをリセットします。
• 反対方向に(JOG モードで)動かします。
• プログラムを訂正します。
• DRF オフセットをキャンセルします。
■ ワークエリアリミット
機能
ワークエリアリミットとは機械加工が可能なエリアのことです。ユーザはこの制
限を使って,リミットスイッチだけでなく軸の移動範囲を制限することができます。
リミットは基本座標系で表します。
参照: YS840DI ユーザーズマニュアル,プログラミング編
ツール先端部 P が保護されたワークエリア内にあるかどうかが確認されます。
ワークエリアリミットの入力値はその軸に最終的に許容される限界です。
監視がツール半径を考慮に入れているかどうかを調べるために,MD 21020:
WORKAREA_WITH_TOOL_RADIUS (ワークエリアリミット付ツール半径公差)
を設定することができます。
保護されたワークエリアを表すのに各軸ごとに 1 対の値(マイナス/プラス)を
使用します。
1-108
ワークエリアリミットを定義する
ワークエリアリミットは 2 つの方法で定義または変更できます。
- "Parameters" オペレーションエリアの オペレーションパネルで以下の設定データ
を使用します。
SD 43430: WORKAREA_LIMIT_MINUS (ワークエリアリミットマイナス)
SD 43420: WORKAREA_LIMIT_PLUS (ワークエリアリミットプラス)
変更は AUTOMATIC モードのリセット状態でしか行えず,変更は直ちにアク
ティブになります。
JOG モードでは常時変更ができますが,新しい移動が始る際にしかアクティ
ブになりません。
- プログラムで G25/G26 を使って行います。変更は直ちにアクティブになりま
す。プログラム動作が優先されるため,設定データに入力された値が上書き
され,RESET 後もプログラム終了後も維持されます。
プログラム可能なワークエリアリミット
X 最大
X 最小
Z 最小
図 1.19 ワークエリアリミット
1-109
Z 最大
起動条件
• SD: WORKAREA_MINUS_ENABLE, WORKAREA_PLUS_ENABLE (マイナス
またはプラス方向ワークエリアリミットアクティブ)によって,ワークエリア
リミットを起動することができます。原点復帰完了後スキャンが始まります。
• PRESET 後,本機能はアクティブになりません。原点復帰完了後,再度アク
ティブになります。
• プログラム実行中,モーダル G コード "WALIMON" を使ってワークエリアリ
ミットを起動し,"WALIMOF" を使って停止することができます。G コード
(NC スタート時にワークエリアリミットが起動または停止)の初期設定値は
MD 20150:
GCODE_RESET_VALUES[n] (G コードグループの初期設定)で設定できます。
• ワークエリアリミットは,無限に回転する軸,すなわち,MD 30310:
ROT_IS_MODULO = 1 (回転軸およびスピンドルのモジューロ変換)の場合は
アクティブとなりません。
働き
モードに応じて,ワークエリアリミットアラーム時の応答が異なることがありま
す。
例 1:座標変換のある自動モード/座標変換なしの自動モード
- ワークエリアリミットアラームが発生するブロックは始まらない。前の
ブロックは正しく終了する。
例 2:重量動作のある自動モード
- ワークエリアリミットアラームが発生するブロックが始まる。重量動作
を伴って移動する軸はワークエリアリミットで停止する。
例 3:座標変換のある JOG モード/変換なしの JOG モード
- 軸がワークエリアリミットで停止する。
1-110
応答
各モードで次のような応答が起こります。
• ブロック準備中に,軸がアプローチする予定の位置がプラス/マイナスワークエリ
アリミットと異なることが分かった場合は,次のアラームのいずれかが出される。
10730 "Working area limitation + or -"(ワークエリアリミットプラスまたはマイナ
ス);例 1
10630 "Axis reached working area limitation + or -"(軸がワークエリアリミットプラス
またはマイナスに到達);例 2
• JOG モードでワークエリアリミットの位置に到達し,続けて同じ方向に移動し
ようとする場合は,アラーム 10631 "Axis at working area limitation + or - "(軸が
ワークエリアリミットプラスまたはマイナスにある)が発生する;例 3
• アラーム発生時,軸が減速する。補間軸のうち 1 軸がソフトウェアリミットスイッ
チを超えた場合,他軸も減速する。輪郭異常が発生する場合がある;例 2,3,5
• プログラムの処理が中止される;例 2
• プログラムの処理が中止される;例 1,2
• ワークエリアリミットへのアプローチ方向と同一の方向キーが使用できなくな
る;例 1,2,3
是非処置
• モードグループをリセットします。
• ワークエリアリミットに関係するパートプログラム (G25/G26) またはセッティ
ングを調べます。
• アラーム発生軸をワークエリアリミットから動かします(JOG モード)
。
1-111
■ プロテクションゾーン
■ 一般事項
保護できるもの
マシンとその機材の様々な要素や,加工されるワークが誤った動作をしないよう
にプロテクションゾーン機能を使って保護することができます。
保護できる要素は次の通りです。
• マシンおよびアタッチメントの固定パーツ(ツールマガジン,旋回プローブ等)
関連があるのは軸の干渉が考えられる要素だけです。
• ツールに属する可動パーツ(ツール,ツールホルダ等)
• ワークに属する可動パーツ(ワークの一部,クランピングテーブル,クラン
プ,スピンドルチャック,テールストック等)
保護方法
保護される要素に対してパートプログラムまたはシステム変数に,二次元および
三次元のプロテクションゾーンを定義します。これらのプロテクションゾーンは
パートプログラム中で起動または停止することができます。
(注)操作モード JOG,MDA,または,AUTOMATIC で加工中,制
御装置は,ツール(とそのプロテクションゾーン)がワーク
プロテクションゾーンに干渉しないかどうか確認します。
プロテクションゾーン監視はチャンネル別です。すなわち,1 つ のチャンネルで有
効なすべてのプロテクションゾーンが相互に監視します。
■ プロテクションゾーンの種類
ワーク関連/ツール関連プロテクションゾーン
プロテクションゾーンは基本的にワーク関連かツール関連に分けられます。
マシンの構造によって,保護されるマシン固有パーツは,ツール関連プロテク
ションゾーンかワーク関連プロテクションゾーンのいずれかに定義されます。
二次元および三次元プロテクションゾーン
二次元または三次元のプロテクションゾーンは頂点が最大 10 までの多角形として
定義することができます。プロテクションゾーンには円弧の輪郭要素を含めるこ
ともできます。
多角形は以前に定義された平面内に定義されます。
第三次元の設定範囲を - ∞ と +∞ の間にすることができます。次のような定義が
可能です。
• プロテクションゾーン第三次元 - ∞から+∞ まで
• プロテクションゾーン第三次元 - ∞ から上限まで
• プロテクションゾーン第三次元下限から +∞ まで
• プロテクションゾーン第三次元下限から上限まで
1-112
マシンまたはチャンネルに関連するプロテクションゾーン
プロテクションゾーンは単一のチャンネルについて有効,あるいは,マシン全体
について有効として定義することができます。
プロテクションゾーンをマシン関連に分類しても,チャンネル関連に分類しても,
プロテクションゾーンの動作方法には影響がなく,プロテクションゾーンのプロ
グラムを作成するエリア(単一のチャンネルか全チャンネルか)に影響があるだ
けです。
アプリケーション:ダブルスライド旋盤
• ツール関連プロテクションゾーンはチャンネル 1 または 2 に割当てられています。
• ワーク関連プロテクションゾーンはマシンに割当てられています。
• 座標系は両チャンネルで同じでなければなりません。
マシン関連プロテクションゾーンとチャンネル関連プロテクションゾーンの最大
数は以下のマシンデータに定義することができます。
• MD 18190: MM_NUM_PROTECT_AREA_NCK
(マシン関連プロテクションゾーンのファイル数)
• MD 28200: MM_NUM_PROTECT_AREA_CHAN
(チャンネル別プロテクションゾーンのファイル数)
(注)マシン別プロテクションゾーンを最大 10 まで,各チャンネル
ごとにチャンネル別プロテクションゾーンを最大 10 まで定義
することができます。
デフォルト設定値はプロテクションゾーン 0 です。
デフォルト設定値を変更すると NC のメモリ割当てに影響し
ます。
1-113
絶対プロテクションゾーンと相対プロテクションゾーン
プロテクションゾーンの座標は,常にプロテクションゾーンの基準点に対する絶
対値としてプログラムされなければなりません。プロテクションゾーンを NC パー
トプログラムによって起動する場合,プロテクションゾーンの基準点をオフセッ
トすることができます。
例
下の図は各プロテクションゾーンの例です。
• ツール関連
• ワーク関連
• 二次元,三次元
• 絶対,相対
スピンドルチャックの
ワーク関連プロテクション
ゾーン
ツールホルダ
ツールホルダの
ツール関連プロテクション
ゾーン
ドリル
図 1.20 旋盤でのアプリケーション例
1-114
ツール関連プロテクショ
ンゾーン
ツール関連プロテクショ
ンゾーン
ワーク
関連プロテクショ
図 1.21 フライス盤でのアプリケーション例
テールストックの相対ワーク関連
プロテクションゾーン
図 1.22 テールストックの相対プロテクションゾーンを示した旋盤でのアプリケー
ション例
1-115
■ 座標系,方向
座標系,軸の種類
プロテクションゾーンが描く空間は直交座標系でなければなりません。したがっ
て,このプロテクションゾーンは,直角の基本座標系 (BCS),すなわち,プログラミ
ングに使用される座標系(フレームを除く)にジオメトリ軸を使って表されます。
ツール関連プロテクションゾーンの座標はツールキャリア基準点 F を基準とする
絶対値として与えられなければなりません。
ワーク関連プロテクションゾーンの座標は基本座標系の原点を基準とする絶対値
として与えられなければなりません。
方向
プロテクションゾーンの方向は,輪郭が描かれる平面の定義(横座標/縦座標)
と,輪郭に垂直な軸 (applicate) とで求められます。
プロテクションゾーンの方向はツール関連プロテクションゾーンとワーク関連プ
ロテクションゾーンとで同じでなければなりません。
■ プロテクションゾーンの定義
一般的な注意
プロテクションゾーンはパートプログラム中で,あるいは,システム変数を使っ
て定義することができます。プロテクションゾーンの定義には以下の情報が含ま
れていなければなりません。
• ワーク関連プロテクションゾーンまたはツール関連プロテクションゾーン
• プロテクションゾーンの方向
• 第三次元の制限タイプ
• 第三次元でのプロテクションゾーンの上限および下限
• 直ちにアクティブになるプロテクションゾーン(マシン関連プロテクション
ゾーンがシステム変数によって起動する場合のみ)
• 最大 10 個までの輪郭要素
プロテクションゾーンのデータがパートプログラムに定義されている場合,この
データは関連するシステム変数に保存されます。
パートプログラムでのプロテクションゾーンの定義
プロテクションゾーンは NC プログラムに次にように定義されます。
1-116
定義の開始
プロテクションゾーンの記述は次のサブプログラムから始まります。
チャンネル別プロテクションゾーンの場合は CPROTDEF
(n,t,applim,appminus,appplus)
マシン別プロテクションゾーンの場合は NPROTDEF (n,t,applim,appminus,appplus)
ただし、
CPROTDEF
チャンネル別プロテクションエリアの定義
NPROTDEF
NCK 別保護エリアの定義
n(整数)
定義されたプロテクションゾーンの数
t(論理型)
TURE:ツール関連プロテクションゾーン
FALSE:ワーク関連プロテクションゾーン
applim(整数)
第三次元での制限タイプ
0:
第三次元での制限なし
1:
第三次元のプラス方向の制限
2:
第三次元のマイナス方向の制限
3:
第三次元のマイナスとプラス方向の制限
appminus(実数)
第三次元のマイナス方向の制限値
appplus(実数)
第三次元のプラス方向の制限値
(注)appplus は appminus より大きいこと。
方向
プロテクションゾーンの方向は平面の選択 (G17,G18,G19) によって決まります。
プロテクションゾーンを定義する前に平面選択を保存し,次にそれをまた更新し
なければならないこともあります。
輪郭の記述
輪郭の記述には以下の内容が含まれます。
• パスの種類の定義(直線,時計方向/反時計方向の円)
• 目標点の定義(平面について 2 値)
• 円形の場合:補間パラメータの定義(平面について 2 値)
プロテクションゾーンの輪郭は移動動作と同様に定義されます。有効なプロテク
ションゾーンは輪郭の左のゾーンです。したがって内部プロテクションゾーンの
輪郭は反時計方向に記述しなければなりません。
1-117
次のような記述ができます。
• 直線輪郭要素では G0,G1
• 時計方向の円弧では G2
(ツール関連プロテクションゾーンでは凸形しかできないので,ワーク関連プ
ロテクションゾーンでにみ有効)
• 反時計方向の扇形では G3
(ワーク関連プロテクションゾーンにだけ可能な)外部プロテクションゾーンは時
計方向に定義すること。
外部プロテクションゾーン
内部プロテクション
ゾーン
内部プロテクションゾーン
図 1.23 外部および内部プロテクションゾーン
輪郭定義の最後の点(最大 11 番目の点)が輪郭定義の最初の点と一致しなくては
なりません。
回転対称輪郭(スピンドルチャック等)の場合,(回転の中心までの輪郭だけでな
く)全ての輪郭を記述しなくてはなりません。
ツール関連プロテクションゾーンは凸形であること。凹形のプロテクションゾー
ンが必要な場合は,プロテクションゾーンを数個の凸形プロテクションゾーンに
分割してください。
(注)・NCU571 と FM-NC にはチャンネル別ゾーンはなく(1 チャンネルしかな
い),NCK プロテクションゾーンだけがあります。
・FM-NC では,各々がプロテクションゾーン 1 つを定義できる最高 4 つまで
の輪郭要素(移動モーション)があります(プロテクションゾーン最大 4
つまで)
。
1-118
凸形プロテクショ
ンゾーン
凹形プロテクションゾーン
(不可)
図 1.24 凸形および凹形ツール関連プロテクションゾーン
定義の終り
マシン別またはチャンネル別プロテクションゾーンの定義はサブプログラム
EXECUTE(n) で終ります。
n (整数)(プロテクションゾーンに無意味な)変数
コマンド CPROTDEF または NPROTDEF と EXECUTE との間のブロックは全て実
行不可能なブロックです。
(注)輪郭の定義には以下の条件が当てはまります。
• CPROTDEF または NPROTDEF と EXECUTE との間の輪郭定義は独立したジオ
メトリ定義です。前のジオメトリ定義と次のジオメトリ定義との間には全く関
連がありません。
• プログラミング可能なフレーム(TRANS, ROT, SCALE, MIRROR)と設定可能
なフレーム(G54 と G57)は使用しても効果がありません。
• G70/G71 または G700/G710 を使ったインチ/ミリ切換は有効です。
• 原点へのアプローチ G74,固定点への移動 G75,ドウェルタイム G4,ブロック
先読み停止 STOPRE,および,M 機能 M0,M1,M2,M17,M30 は輪郭定義
には使用できません。
• G40 (ツール半径補正なし)を起動しなければなりません。
システム変数を使ったプロテクションゾーンの定義
プロテクションゾーンは以下のシステム変数によって定義することもできます。
この種の輪郭定義にもパートプログラムでの輪郭定義と同じ条件が当てはまります。
1-119
システム変数
$SN_PA_ACTIV_IMMED[n]
$SC_PA_ACTIV_IMMED[n]
意味
"Active immediately after referencing"
(原点復帰完了後即アクティブ)の識別子
タイプ
BOOL
制御装置の電源をオンにし,軸を原点復帰直後にプロテク
ションゾーンがアクティブになる。
FALSE:プロテクションゾーンが直ぐにはアクティブになら
ない。
TRUE:プロテクションゾーンが直ちにアクティブになる。
$SN_PA_T_W[n]
$SC_PA_T_W[n]
"Workpiece or tool-related protection zone"
(ワークまたはツール関連プロテクションゾーン)の識別子
INT
0:ワーク関連プロテクションゾーン
1:予備
2:予備
3:ツール関連プロテクションゾーン
$SN_PA_ORI[n]
$SC_PA_ORI[n]
プロテクションゾーン方向の識別子
$SN_PA_LIM_3DIM[n]
$SC_PA_LIM_3DIM[n]
平面に垂直な軸のプロテクションゾーン制限の識別子
INT
0:第 1・第 2 ジオメトリ軸平面での垂直軸の定義
1:第 2・第 1 ジオメトリ軸平面での垂直軸の定義
2:第 2・第 3 ジオメトリ軸平面での垂直軸の定義
INT
0:制限なし (- ∞ < x < + ∞ )
1:プラス方向の制限 (- ∞ < x < + 限界 )
2:マイナス方向の制限 (- 限界 < x < + ∞ )
3:両方向の制限 (- 限界 < x < + 限界 )
$SN_PA_PLUS_LIM[n]
$SC_PA_PLUS_LIM[n]
平面に垂直な軸のプロテクションゾーンのプラス限界
REAL
$SN_PA_MINUS_LIM[n]
$SC_PA_MINUS_LIM[n]
平面に垂直な軸のプロテクションゾーンのマイナス限界
REAL
$SN_PA_CONT_NUM[n]
$SC_PA_CONT_NUM[n]
輪郭要素の数
INT
$SN_PA_CONT_TYP[n,i]
$SC_PA_CONT_TYP[n,i]
輪郭タイプ [i]
i 番目の輪郭要素の輪郭タイプ (G1, G2, G3)
INT
$SN_PA_CONT_ORD[n,i]
$SC_PA_CONT_ORD[n,i]
輪郭 [i] の終点
縦座標値
REAL
$SN_PA_CONT_ABS[n,i]
$SC_PA_CONT_ABS[n,i]
輪郭 [i] の終点
横座標値
REAL
$SN_PA_CENT_ORD[n,i]
$SC_PA_CENT_ORD[n,i]
円形輪郭 [i] の中心点
縦座標絶対値
REAL
$SN_PA_CENT_ABS[n,i]
$SC_PA_CENT_ABS[n,i]
円形輪郭 [i] の中心点
横座標絶対値
REAL
$SN_... マシン別プロテクションゾーンのシステム変数
$SC_... チャンネル別プロテクションゾーンのシステム変数
添字 "n" はプロテクションゾーン数に相当し,"0" (_ 1 番目のプロテクションゾー
ン ) から始まります。
添字 "i" は輪郭要素数に相当します。この添字は "0" (_ 1 番目の輪郭要素 ) から
始まります。輪郭要素は昇順に定義すること。)
(注)システム変数は再編成中,元に戻りません。これはデータが
CPROTDEF, EXECUTE で書かれている場合にも当てはまります。
1-120
データの保存
プロテクションゾーンの定義が記載されたデータブロックは以下のファイルに保
存されます。
ファイル
_N_NCK_PRO
ブロック
マシン別プロテクションゾーンのデータブロック
_N_CHAN1_PRO チャンネル 1 のチャンネル別プロテクションゾーンのデータブ
ロック
_N_CHAN2_PRO チャンネル 2 のチャンネル別プロテクションゾーンのデータブ
ロック
データブロックはまた以下のファイルにもバックアップされます。
ファイル
ブロック
_N_INITIAL_INI
プロテクションゾーンの全データブロック
_N_COMPLETE_PRO
プロテクションゾーンの全データブロック
_N_CHAN_PRO
チャンネル別プロテクションゾーンの全データブロック
■ プロテクションゾーンの有効と無効
一般的な注意
プロテクションゾーンは「信号切替」「有効」および「無効」を設定することがで
きます。プロテクションゾーンは違反されていないかどうか有効時のみ監視され
ます。
プロテクションゾーンは常にパートプログラム使用時に有効となります。
プロテクションゾーンは電源オン時に,PLC ユーザプログラムによっても起動でき
ます。PLC によってプロテクションゾーンを有効にする場合は,まず NC パート
プログラム中で信号切替しなければなりません。
パートプログラム中で有効になったプロテクションゾーンは常時アクティブで,
PLC 信号が有効になる必要はありません。
プロテクションゾーンの信号切替,有効,無効は,マシン関連プロテクション
ゾーンでも,チャンネル別に行われます。
信号切替されたマシン関連およびチャンネル別プロテクションゾーンは,これら
プロテクションゾーンが有効となっているチャンネル内でしかアクティブになり
ません。
電源オン中に起動されたマシン関連プロテクションゾーンは全チャンネルでアク
ティブになります。
プロテクションゾーンはパートプログラム中でしか無効にできません。
プロテクションゾーンは,関連するジオメトリ軸が全て原点復帰が行われるまで
考慮されません。
プロテクションゾーンのステータス(無効,信号切替,有効)はプログラムエン
ドまたはリセット後も維持されます。
プロテクションゾーンは数チャンネルで同時にアクティブになる場合もあります
(向かい合った 2 つのスライダ上のクイル等 → ダブルサイド,ダブルスピンドル
マシン)
。
1-121
MD: MM_NUM_PROTECT_AREA_ACTIVE に,1 つのチャンネルで同時にアクティ
ブなプロテクションゾーンの最大数が定義されます。一度にアクティブなチャン
ネル別またはマシン別のプロテクションゾーンは最大 10 までです。
デフォルト設定値はプロテクションゾーン 0 です。
デフォルト設定値を変更すると NC のメモリ割当てに影響します。
有効時のエラー
プロテクションゾーンが有効となる際,対応するシステムデータを調べ,エラー
が検出されると,プロテクションゾーンは有効となりません。
エラーには次のようなものがあります。
• 輪郭の定義が不完全または矛盾している。
• ツール関連プロテクションゾーンが凸形でない。
• プロテクションゾーン番号がない。
• アクティブなプロテクションゾーンの最大可能数を超えている。
• プロテクションゾーンの方向が異なる。
パートプログラムによる無効,信号切替,有効
これを行うためには,以下の所定のサブプログラムコールします。
CPROT (n,state,xMov,yMov,zMov)
チャンネル別プロテクションゾーンの場合
NPROT (n,state,xMov,yMov,zMov)
マシン別プロテクションゾーンの場合
ただし,
CPROT
チャンネル別プロテクションエリアが ON
NPROT
NCK 別プロテクションエリアが ON
n (整数)
プロテクションゾーンの数
state (整数)
起動ステータス
0:
プロテクションゾーンを無効にする
1:
プロテクションゾーンを信号切替する
2:
プロテクションゾーンを有効にする
xMov, yMov, zMov (実数)
ジオメトリ軸にすでに定義されているプロテク
ションゾーンのオフセット
第一,第二,または,第三次元にプロテクションゾーンのオフセットがあっても
なくても(予備)起動できます。
オフセットはツールサポート原点 F (ツール別プロテクションゾーンの場合)ま
たはマシン原点(ワーク関連プロテクションゾーンの場合)を基準に定義されま
す。
(注)1 つのチャンネル内でオフセットの値が異なるプロテクション
ゾーンは有効にできません。
1-122
PLC ユーザプログラムによる有効化
信号切替されたプロテクションゾーンは PLC インタフェースを介し,PLC ユーザ
プログラムによって操作にすることができます。例えば,ツールセンサが作業レ
ンジに移動する前に,関連するプロテクションゾーンを有効にして監視します。
信号切替されたプロテクションゾーン
図 1.25 旋盤の例:信号切替されたツールプローブ用プロテクションゾーン
プロテクションゾーンが信号切替され,位置オフセットがパートプログラムに定
義されます。
パートプログラムの実行中のブロックでどのプロテクションゾーンが信号切替さ
れているかを確認するために,チャンネル別 IS "Machine-related protection zone 1
(...10) pre-activated"(マシン関連プロテクションゾーン 1 (...10) 信号切替)(DB21, ...
DBX272.0 - 273.1) または "Channel-specific protection zone 1 (...10) pre-activated"
(チャンネル別プロテクションゾーン 1 (...10) 信号切替)(DB21, ... DBX274.0 275.1) が PLC に送信されます。
また PLC には以下の情報も通知されます。
• 実行中のブロックで,起動されたどのプロテクションゾーンに違反しているか
• 信号切替されたどのプロテクションゾーンが PLC に起動すると,実行中のブ
ロックで違反するか
この情報はチャンネル別 IS "Machine-related protection zone 1(...10) violated" (マシ
ン関連プロテクションゾーン 1(...10) 違反)(DB21, ... DBX276.0 to DBX277.1) また
は "Channel-specific protection zone 1(...10) violated" (チャンネル別プロテクション
ゾーン 1(...10) 違反)(DB21, ... DBX278.0 to DBX279.1) によって PLC に送信されます。
したがって,例えば,パーツを作業レンジ内に動かす前に,そのパーツが移動す
るエリア内にツール(またはワーク)が配置されているかどうかを調べることが
できます。
NC によって信号切替されたプロテクションゾーンは PLC を介して有効または無
効にすることができます。プロテクションゾーンが「有効」の場合は,プロテク
ションゾーン原点の絶対位置を指定することはできません。指定できるのはプロ
テクションゾーンが信号切替されている場合です。
PLC はチャンネル別 IS "Activate machine-related protection zone 1 (...10)" (アクティ
ブなマシン関連プロテクションゾーン 1 (...10))(DB21, ... DBX8.0 to DBX9.1) また
は "Activate channel-specific protection zone 1 (...10)"(アクティブなチャンネル別関
連プロテクションゾーン 1 (...10))(DB21, ... DBX10.0 to DBX11.1) を使用してゾーン
を完全に操作可能にします。
1-123
パートプログラムから有効にしたプロテクションゾーンは PLC プログラムから停
止できません。
(注)したがって,プロテクションゾーン数を PLC ユーザプログラ
ムに設定し,次に PLC を介して有効に動しなければならない
ことになります。パートプログラムでの信号切替はこれらの
プロテクションゾーンにしか役立ちません。NC プログラマー
が設定し,PLC プログラムに入力されていないプロテクショ
ンゾーンの場合は,パートプログラムで有効にするしかありま
せん。
制御システム電源オン時の起動
システム変数
$SN_PA_ACTIV_IMMED[n] または $SC_PA_ACTIV_IMMED[n] を設定すると,電
源をオンにし,続けて原点復帰をした直後にマシン関連およびチャンネル別プロ
テクションゾーンを(信号)切替することができます。
これで全てのチャンネルのマシン関連プロテクションゾーンが(信号)切替します。
相対オフセットは設定できません。
他のプロテクションゾーン同様,これらのプロテクションゾーンも,パートプロ
グラム中で信号切替,有効,無効にできます。
(注)アクティブなツール関連プロテクションゾーンがない場合は,
ワーク関連プロテクションゾーンに対するツールパスが調べ
られます。
アクティブなワーク関連プロテクションゾーンがない場合は,
プロテクションゾーンは調べられません。
ブロックサーチ
計算を使ったブロックサーチでは,プロテクションゾーンの最終プログラム状態
(無効,信号切替,有効)を考慮します。
プログラムテスト
(自動モードでは)プログラムテスト中,(信号)切替されたプロテクションゾーン
が監視されます。
1-124
■ プロテクションゾーンの違反と各プロテクションゾーンの一時イネーブル
一般的な動作
起動または停止されるワーク関連・ツール関連プロテクションゾーンが衝突しな
いかどうかが監視されます。プロテクションゾーンの違反が検出された場合の各
操作モードの動作は次の通りです。
一時イネーブルを終了する
次の場合,プロテクションゾーンの一時イネーブルが終了します。
• NC RESET 時
• AUTOMATIC モードと MDA モードで,ブロック終了時に(軸が)プロテク
ションゾーン外部にある場合
• 手動モードで,動作の終了時に(軸が)プロテクションゾーン外部にある場合
• 別のプロテクションゾーンが起動しておりそれも追加する場合
RESET 時に,イネーブルにされたプロテクションゾーンが全てまたアクティブに
なります。プログラムを再始動する場合,または,ジョグを使用する場合は,プ
ロテクションゾーンを再度イネーブルにしなければなりません。RESET 後に再度
アクティブになるプロテクションゾーン内に現在位置がある場合は,最初のパス
動作の際にプロテクションゾーンをイネーブルにしてください。
ツール関連プロテクションゾーンの停止
ツール関連プロテクションゾーンは,パートプログラム中で停止するか,あるい
は,信号切替されている場合は,PLC によって「操作不能」にされる場合にしか,
停止できません。
信号切替されたプロテクションゾーン
プロテクションゾーンは NC プログラムによって信号切替できます。完全に有効に
するには,PLC によって「操作可能」状態にする必要もあります。
AUTOMATIC モードとは異なり,PLC インタフェース信号 "Make pre-activated
protection zones operative" (信号切替プロテクションゾーンを操作可能にする)を
変更しても,ジオメトリ系の静止軸に影響があるだけです。これは,一旦モー
ションが開始されて,操作不能なプロテクションゾーンが「操作可能」になって
も,軸が停止するまで評価されず,その結果アラームが出される場合があるとい
うことです。
ただし,移動モーション進行中に信号切替されたプロテクションゾーンが「操作
可能」になると,警告信号 "Protection zone monitoring not guaranteed" (プロテク
ションゾーン監視保証なし)と PLC インタフェース信号 "Protection zone monitoring
not guaranteed" (プロテクションゾーン監視保証なし)が出力されます。
重量動作の監視
(注)別のチャンネルに割当てられている軸は考慮されません。
アプローチ予定の最終位置が終点と見なされます。チャンネル変更後に軸が移動し
たかどうかは考慮されません。
1-125
操作モード別の動作
自動モードおよび MDA モード
自動モードではプロテクションゾーンは違反されません。
• ブロックでの動作が外部からプロテクションゾーン内部への場合 (N30),前の
ブロックの終り (N20) まで減速され,動作が停止します(図 1.26 参照)。
- プロテクションゾーンが信号切替されているが,PLC によって有効になら
ない場合,続けて機械加工が行われる(例 1 )。
- プロテクションゾーンが有効または信号切替されており,PLC によって有
効にされた場合は,機械加工が停止する(例 2 )
。
• ブロックの開始点がプロテクションゾーン内にある場合は,動作は始まりませ
ん。
ワーク関連プロテクションゾーンの場合,プロテクションゾーンに違反すると,
アラーム 10700 "NCK protection zone violated in Automatic or MDA" (自動または
MDA モードで NCK プロテクションゾーン違反)またはアラーム 10701 "Channelspecific protection zone violated in Automatic or MDI" (自動または MDA モードで
チャンネル別プロテクションゾーン違反)が動作します。
プロテクションゾーン
信号切替された
プ ロ テ ク シ ョ ン ゾ ー ン が PLC
に有効にされない場合(例 1)
PLC に有効にされた信号切替プロテクション
ゾーンの場合,または,有効にされたプロテク
ションゾーンの場合:プロテクションゾーン
イネーブル後(例 2)
図 1.26 プロテクションゾーンに入った場合のパス速度の動作
いくつかの軸モーションのオーバレイ
外部 ZO (ゼロオフセット)または DRF の重量動作は,十分早い時点で実行され
る場合はプロテクションゾーンに考慮されます。
プロテクションゾーンがアクティブ,すなわち,操作可能である間に,重量動作
が起こると,警告としてアラームが出力されます。このアラームはマシン動作に
は影響がなく,伝送されたモーションが十分考慮されると自動的にリセットされ
ます。PLC 信号 "Protection zone monitoring not guaranteed" (プロテクションゾーン
監視保証なし)も同時にアラームとしてセットされます。
1-126
ワーク関連プロテクションゾーンのイネーブル
ワーク関連プロテクションゾーンに違反すると,AUTOMATIC モードと MDA モー
ドでは,オペレータが NC スタートを使ってプロテクションゾーンを一時的にイ
ネーブルにし,ゾーン内に入れるようにすることができます。アラームを確認し,
• AUTOMATIC モードと MDA モードでは,プロテクションゾーンに入ります
NC スタートを使って一時的にイネーブルにし,プログラム設定されたパス等の全
てのツール関連プロテクションゾーンが入ることができるのはワーク関連プロテ
クションゾーンだけです。
アラーム後,NC スタート時に,信号切替されたツールまたはワーク関連プロテク
ションゾーンが PLC によって無効になる場合は,プロテクションゾーンが一時的
にイネーブルにされず,続けて加工作業が行われます。
完全に操作可能で,信号切替されたプロテクションゾーンによって加工作業が中
断され,プロテクションゾーンの違反によってアラームが出力される場合は,PLC
がプロテクションゾーンを再度「操作不能」にすれば,NC スタート時に加工作業
が再開します。
NC スタートだけによる場合よりもプロテクションゾーンのイネーブルの安全性を
高めたい場合は,このアラームが動作する時に,NC スタートをディスエーブルに
するか,PLC ユーザプログラムの他の条件に依存させなければなりません。
ユーザがプロテクションゾーン内に入れるようにしたくない場合は,NC RESET を
使って移動動作を終了させることができます。
動作によって複数のプロテクションゾーンに同時に違反する場合は,これら各プ
ロテクションゾーンを確認する必要があります。NC スタートを使って,各プロテ
クションゾーンを次から次にイネーブルにすることができます。
一時イネーブルのアプリケーション例
• 回転パートの穴開け:ドリルはスピンドルチャックのプロテクションゾーンに入
れます。
重量動作の監視
NC ブロックを準備する際,重量動作によって生じるジオメトリ軸のオフセットの
一部を考慮に入れます。
ブロック準備時に考慮に入れられないオフセットがさらに生じた場合は,PLC イン
タフェース信号 "Protection zone monitoring not guaranteed" (プロテクションゾーン
監視保証なし)がセットされます。この信号は,考慮されていないオフセットが
アクティブである限り,セットされたままです。この信号はブロック内でもセッ
ト・キャンセルされます。
PLC インタフェース信号と同時に,自動解除アラーム "Protection zones not
guaranteed" (プロテクションゾーン監視保証なし)が出力されます。
1-127
ブロックの準備では,以下のジオメトリ軸の重量動作が考慮されます。
1. DRF オフセット
2. 外部ゼロオフセット
3. ファインツールオフセット
4. 早送り
5. コンパイルサイクルによって生じるオフセット
6. 振動
7. 同時位置決め軸
8. 位置決め軸
重量動作によるオフセットを再度考慮に入れる場合,または,オフセットが再度
ゼロに減少した場合は,アラームがキャンセルされるか,PLC インタフェース信号
がリセットされます。
(注)位置決め軸の最終位置が,ブロック全体としての位置と見な
されます。これは,位置決め軸が移動し始めると,アラーム
"Protection zones not guaranteed" (プロテクションゾーン監視
保証なし)が出力されるということです。
重量動作自体に制限はなく,プログラム処理における干渉も
ありません。
JOG モードでの動作
いくつかの軸モーションのオーバレイ
複数のジオメトリ軸が同時に JOG 移動動作することができます。
プロテクションゾーンの効果的な監視は保証されません。したがって,警告
"Protection zone monitoring not guaranteed" (プロテクションゾーン監視保証なし)
と,インタフェース信号 "Protection zone monitoring not guaranteed" (プロテクショ
ンゾーン監視保証なし)がセットされます。
軸モーションは,プロテクションゾーンによって開始点と同様に全方向に制限さ
れます。
1-128
連続 JOG モードでのモーションの終点
単一軸の場合の
JOG モードでの
最大軸方向距離
開始点
図 1.27 複数軸の場合 JOG モードでプロテクションゾーンを通るモーションの制限
ジオメトリ系の軸がモーションを終了した後(補間の最後),警告がリセットさ
れ,最終位置が 1 つ以上のプロテクションゾーン内にあるかどうかが調べられま
す。
この場合,次の 3 つの状況が考えられます。
1. その位置が全てのアクティブなプロテクションゾーン外部にある場合,次の移
動モーションを正常に始めることができます。イネーブルにされているか,ま
たは,信号切替されているだけでまだ有効でないプロテクションゾーンには,
適当な PLC インタフェース信号 "Machine-specific or channel-specific protection
zone violated" (マシン別またはチャンネル別プロテクションゾーン違反)が
セットされます。
2. その位置がアクティブなプロテクションゾーン内部にある場合は,アラーム
"Protection zone violated in JOG" (JOG モードでプロテクションゾーン違反)が
出されるため,どの移動モーションもディスエーブルにされます。適当な PLC
インタフェース信号 "Machine-specific or channel-specific protection zone violated"
(マシン別またはチャンネル別プロテクションゾーン違反)もセットされます。
このアラームをリセットするには
a) 問題のプロテクションゾーンを一時的にイネーブルにします。
b) 関連プロテクションゾーンが信号切替されている場合は停止します。
c) MDA でプロテクションゾーンを停止します。
3. その位置がプロテクションゾーンの限界上にある場合(位置はまだ有効)
,ア
ラームは出されません。
(注)ジオメトリ系の軸がひとつでもまだ振動している間は,ス
テータス "Motions of axes in geometry system completed" (ジオ
メトリ系軸モーション完了)には到達できません。警告がア
クティブの間は,ジオメトリ系の他の軸が続けて移動できます。
開始される最初の軸のモーションが,モーションの前に定め
られた制限によって終了する場合は,アラーム "Protection
zone reached in JOG" (JOG モードでプロテクションゾーン到
達)は出力されません。
1-129
手動モード
(予備)起動されたプロテクションゾーンは手動モード(JOG,INC,はずみ車)で
も監視されます。
軸の移動モーションの制限
JOG モードでは,軸のモーションがソフトウェアリミットスイッチまたはワーク
エリアリミットによって制限されます。プロテクションゾーンはジオメトリ軸の
移動モーションをさらに制限する要素です。
軸がプロテクションゾーンに到達したために,軸の移動モーションが制限される
場合は,自動リセットアラーム "Protection zone reached in JOG" (JOG モードでプ
ロテクションゾーン到達)が出されます。このアラームのテキストには違反され
たプロテクションゾーンと関連する軸が詳細に表示されます。単一の軸が JOG
モードで移動する場合は,どのプロテクションゾーンにも違反しないことが保証
されています(この応答はソフトウェアリミットスイッチまたはワークエリアリ
ミットに類似しています)
。
アラームは次の場合にリセットされます。
1. プロテクションゾーンに至らないパスに沿って軸が移動する場合
2. プロテクションゾーンがイネーブルにされる場合
3. NC リセット時
軸がプロテクションゾーン限界にある場合にプロテクションゾーンの方向に移動
すると,自動リセットアラーム "Protection zone reached in JOG" (JOG モードでプ
ロテクションゾーン到達)が出され,モーションは始まりません。
ワーク関連プロテクションゾーンのイネーブル
ワーク関連プロテクションゾーンに違反すると,JOG モードではオペレータがプロ
テクションゾーンを一時的にイネーブルにして入れるようにすることができます。
アラームがリセットされ,
• 新しい移動コマンドの後,手動モードで動作が始まります。
1-130
プロテクションゾーンの一時イネーブル
JOG モードでは次の場合プロテクションゾーンをイネーブルにできます。
1. 現在位置がプロテクションゾーン内にある場合(アラームアクティブ)または
2. プロテクションゾーン限界上でモーションが始まる予定の場合(アラームアク
ティブ)
次の場合プロテクションゾーンがイネーブルにされます。
• プラスの信号エッジが PLC インタフェース "Temporary enabling of protection
zones" (プロテクションゾーンの一時イネーブル)に到着する場合。このイ
ネーブル信号はアクティブのアラームをリセットします。
• 次に軸が再び移動して同じプロテクションゾーンに入る場合。
モーションの開始によって
• プロテクションゾーンがイネーブルにされます。
• 適当な PLC インタフェース信号 "Machine-specific or channel-specific protection
zone violated" (マシン別またはチャンネル別プロテクションゾーン違反)が
セットされます。
• 軸が移動し始めます。
イネーブルにされたプロテクションゾーンに至らないモーションが始まると,イ
ネーブル信号は無効になります。
現在位置が他のアクティブなプロテクションゾーン内にある場合,または,開始
されたモーションによって他のプロテクションゾーンの限界を超えなければなら
ない場合は,アラーム 10702,10703 または 10706,10707 が出力されます。再度
PLC インタフェース信号 "Temporary enabling of protection zones" (プロテクション
ゾーンの一時イネーブル)がセットされ,アラームが出されたプロテクション
ゾーンをイネーブルにすることができます。
各プロテクションゾーンのイネーブル信号は,操作モード JOG から AUTOMATIC
または MDA に切換える場合も,その逆の場合も有効です。すなわち,
AUTOMATIC および MDA で出力されたプロテクションゾーンのイネーブル信号
は JOG に切り換えても有効です。
ジオメトリ系内の軸が停止する次の時点で,最終位置が関連プロテクションゾー
ン外部にある場合は,
• 各プロテクションゾーンのイネーブル信号がキャンセルされます。
• 適当な PLC インタフェース信号 "Machine-specific or channel-specific protection
zone violated" (マシン別またはチャンネル別プロテクションゾーン違反)がリ
セットされます。
1-131
■ プロテクションゾーンを管理する制約
適用エリア
プロテクションゾーンは直角の基本座標系内のジオメトリ軸について定義しなけ
ればなりません。さらに,全てのプロテクションゾーンが同じ方向でなければな
りません。
これらの条件が満たされれば,例えば,次のような機器構成のマシンについてプ
ロテクションゾーン監視が実施できます。
• 3 軸フライス盤
• 穴あけ方向が一定の中ぐり機
• 変換なしの旋盤
• Transmit(トランスミット面)と外周面の変換のある旋盤には以下の項目が使用
できます。
- プロテクションゾーンが,スピンドル軸周囲に回転対称に定義されてい
るマシンパーツ ( この場合,DRF オフセットがアクティブであってはなら
ない )
- 加工されるワーク上のプロテクションゾーン
• プロテクションゾーンがニーテーブルまたはツールホルダ周囲に定義されるひ
ざ形縦フライス
次のような機器構成のマシンではツールプロテクションゾーン監視をできません。
• 方向軸付きフライス盤
• Transmit または外周面の変換のある旋盤上では,次のような場合を除き,固定
マシンパーツを保護できません。
- プロテクションゾーンがスピンドル軸周囲に回転対称に定義されている
マシンパーツ ( この場合,DRF オフセットがアクティブであってはならな
い)
• 方向軸のあるレーザーマシン
• 複数のツールが同時にアクティブの場合は,相互に監視しなければなりません。
位置決め軸
位置決め軸として移動するジオメトリ軸があるかどうか終点だけを調べます。
モーションの間,アラーム "Protection zone monitoring not guaranteed" (プロテク
ションゾーン監視保証なし)が出されます。
軸の交換
ある軸がその軸の交換機能により,チャンネル内で現在アクティブでない場合,
そのチャンネル内で最後にアプローチした軸の位置を現在有効な位置と見なしま
す。この軸がチャンネル内でまだ移動していない場合は,軸位置 = 0 がその位置と
見なされます。
その軸の実際の位置を調べることはできません。
1-132
マシン関連プロテクションゾーン
マシン関連プロテクションゾーンも基本座標系で定義されなければなりません。
マシン関連プロテクションゾーンが異なったチャンネル中でアクティブな場合は,
これら全てのチャンネルで,ジオメトリ軸の座標系中の位置は,基本座標系中の
同じ位置でなければなりません。そうでないと,プロテクションゾーンのマシン
上の物理的な位置がチャンネルごとに異なることになります。これは電源オン段
階でのマシン関連プロテクションゾーンの起動に影響します。これは,これらの
プロテクションゾーンが後で全てのチャンネルでアクティブになるからです。
1.2.3 補足条件
■ 軸監視機能
監視機能が正しく応答できるためには,以下のマシンデータに正しい値を入力す
ることが大切です。
- MD 31030: LEADSCREW_PITCH ( ボールねじのピッチ )
- ギア比 ( ロードギアボックス,エンコーダ )
MD 31050: DRIVE_AX_RATIO_DENOM[n] ( 分母,ロードギアボックス )
MD 31060: DRIVE_AX_RATIO_NUMERA[n] ( 分子,ロードギアボックス )
MD 31070: DRIVE_ENC_RATIO_DENOM[n] ( 分母,測定ギアボックス )
MD 31080: DRIVE_ENC_RATIO_NUMERA[n] ( 分子,測定ギアボックス )
- MD 32810: EQUIV_SPEEDCTRL_TIME[n]
( フィードフォワード制御用速度制御ループ等価時定数 )
- 出力電圧/出力速度の関係
( アナログドライブのみ )
MD 32260: RATED_VELO ( 定格モータ速度 )
MD 32250: RATED_OUTVAL ( 定格出力電圧 )
- エンコーダの分解能
関連マシンデータは下記の参照に説明してあります。
参照: 1.8 位置指令単位と検出単位 (G2)
■ プロテクションゾーン
プロテクションゾーン監視が有効なのは,関連軸,すなわちジオメトリ系の軸を
原点復帰が完了している場合だけです。
可用性
機能「プロテクションゾーン」は次の機種で使用できます。
NCU 571/572/573 のバージョンが SW 2 以上の SINUMERIK 840D
SINUMERIK 810D,SW 1 以上
NCU 570 のバージョンが SW 2 以上の SINUMERIK FM-NC
1-133
1.2.4 データの説明 (MD,SD)
■ チャンネル別マシンデータ
21020
MD 番号
WORKAREA_WITH_TOOL_RADIUS
ワークエリアリミット付ツール半径公差
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:3.1
意味:
= 1:ワークエリアリミットに関してツール半径が考慮される
= 0:ツール半径が考慮されない
■ 軸/スピンドル別マシンデータ
■ 軸監視機能
36020
MD 番号
POSITIONING_TIME
イグザクトストップ時間遅延
初期設定:5
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:秒
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
この MD は,ある位置にアプローチする際(動作最後で,位置指令が払出し
部完了)
,追従誤差がイグザクトストップの限界値に達するまでに要する時間
を定義する。追従誤差が限界値に達しない場合は,アラーム 25080
"Positioning monitoring" (位置決め監視)がトリガされ関連する軸が停止する。
MD に設定する値は,正常動作で監視機能がトリガされることのないように,
十分大きくすべきである。全移動動作(加速,一定速移動,減速)が他の機
能によって広く監視されるからである。
関連性
MD 36010: STOP_LIMIT_FINE (イグザクトストップ)
1-134
36030
MD 番号
STANDSTILL_POS_TOL
ゼロ速度公差
初期設定:0.2
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
この MD は以下の追従監視機能の公差範囲を与える。
• モーションブロック終了時(モーション最後で,部分位置指令 = 0)に,追従
誤差を監視し,それがプログラム可能な STANDSTILL_DELAY_TIME (ゼロ
速度監視遅延時間)範囲内で STANDSTILL_POS_TOL (ゼロ速度公差)の限
界値に達するかどうかを調べる。
• 位置決め動作の最後(イグザクトストップ到達時)に,位置決め監視がゼロ
速度監視に変わる。この場合に,軸を監視して,軸が MD:
STANDSTILL_POS_TOL (ゼロ速度公差)に設定されている距離を超えて,
所定位置から外れていないかどうかを確認する。
いずれかの方向で指令位置ゼロ速度公差に違反している場合は,アラーム
25040 "Zero speed monitoring" (ゼロ速度監視)が動作し,軸が停止する。
例外,エラー
ゼロ速度公差は STOP_LIMIT_COARSE を超えていること。
関連性
MD 36040: STANDSTILL_DELAY_TIME (ゼロ速度監視遅延時間)
36040
MD 番号
STANDSTILL_DELAY_TIME
ゼロ速度監視遅延時間
初期設定:0.2
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:秒
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
MD 36030: STANDSTILL_POS_TOL(ゼロ速度公差)参照
関連性
MD 36030: STANDSTILL_POS_TOL(ゼロ速度公差)
36050
MD 番号
CLAMP_POS_TOL
インタフェース信号 "Clamping active" (クランピングアクティブ)
によるクランピング公差
初期設定:0.5
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
クランピング監視は IS "Clamping active" (クランピングアクティブ)(DB31, ...
DBX2.3) によって起動される。監視された軸が,指令位置(イグザクトストップ
リミット)からクランピング公差を超えていると,アラーム 26000 "Clamping
monitoring" (クランピング監視)が動作し,軸が停止する。
例外,エラー
クランピング公差は STOP_LIMIT_COARSE を超えていること。
関連性
IS "Clamping active" (クランピングアクティブ)(DB31, ... DBX2.3)
1-135
36100
MD 番号
POS_LIMIT_MINUS
第 1 ソフトウェアリミットスイッチマイナス
初期設定:- 100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
第 1 ソフトウェアリミットスイッチプラスの場合と同様であるが,マイナス
方向で移動範囲の制限値である。
PLC インタフェース信号 "2nd software limit switch minus" (第 2 ソフトウェア
リミットスイッチマイナス)がセットされていない場合は,原点復帰後,こ
の MD がアクティブになる。
この MD は次の場合は無意味
関連性
軸の原点復帰が完了していない場合
IS "2nd software limit switch minus"
(第 2 ソフトウェアリミットスイッチマイナス)(DB31, ... DBX12.2)
36110
MD 番号
POS_LIMIT_PLUS
第 1 プラスソフトウェアリミットスイッチ
初期設定:100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
ハードウェアリミットスイッチだけでなくソフトウェアリミットスイッチも
起動できる。各軸のプラス範囲限界のマシン軸系の絶対位置が入力される。
PLC インタフェース信号 "2nd software limit switch plus" (第 2 ソフトウェアリ
ミットスイッチプラス)がセットされていない場合は,原点復帰後,この
MD がアクティブになる。
この MD は次の場合は無意味
関連性
軸の原点復帰が完了していない場合
IS "2nd software limit switch plus"
(第 2 ソフトウェアリミットスイッチプラス)(DB31, ... DBX12.3)
1-136
36120
MD 番号
POS_LIMIT_MINUS2
第 2 ソフトウェアリミットスイッチマイナス
初期設定:- 100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
第 2 ソフトウェアリミットスイッチプラスの場合と同様であるが,マイナス
方向で移動範囲の制限値である。
ソフトウェアリミットスイッチの 1 をアクティブにするか 2 をアクティブに
するか,インタフェース信号を介して PLC から選択できる。
例
DB31, DBB
12 Bit 2 = 0
第 1 軸の「第 1 ソフトウェアリミットスイッチマイナス」がアクティブ
12 Bit 2 = 1
第 1 軸の「第 2 ソフトウェアリミットスイッチマイナス」がアクティブ
この MD は次の場合は無意味
関連性
軸の原点復帰が完了していない場合
IS "2nd software limit switch minus"
(第 2 ソフトウェアリミットスイッチマイナス)(DB31, ... DBX12.2)
36130
MD 番号
POS_LIMIT_PLUS2
第 2 プラスソフトウェアリミットスイッチ
初期設定:100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
このマシンデータを使って,第 2 ソフトウェアリミットスイッチのプラス方
向の位置を定義できる。
PLC からのインタフェース信号によって,2 個のソフトウェアリミットスイッ
チ 1 または 2 のいずれをアクティブにするかを選択できる。
例
DB31, DBB
12 Bit 3 = 0
第 1 軸の「第 1 ソフトウェアリミットスイッチプラス」がアクティブ
12 Bit 3 = 1
第 1 軸の「第 2 ソフトウェアリミットスイッチプラス」がアクティブ
この MD は次の場合は無意味
関連性
軸の原点復帰が完了していない場合
IS "2nd software limmit switch plus"
(第 2 ソフトウェアリミットスイッチプラス)(DB31, ... DBX12.3)
1-137
36200
MD 番号
AX_VELO_LIMIT[n]
速度監視のスレッシュホールド値
初期設定:11500
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:mm/min,rev/min
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
実際速度監視機能のスレッシュホールド値がこの MD に入力される。軸に 1
個以上アクティブなエンコーダがあり,そのリミット周波数未満で動作して
いる場合は,スレッシュホールド値を超えると,アラーム 25030 "Actual
velocity alarm limit" (実際速度アラームリミット)が発生し,その軸が停止状
態になる。
設定値:
• 軸については,MD:MAX_AX_VELO (最大軸速度)より 10 ~ 15 % 上の値
を選んだほうがよい。MD: TEMP_COMP_TYPE (熱補正)に設定された熱
補正がアクティブな場合は,MD: COMP_ADD_VELO_FACTOR (補正によ
る速度オーバーシュート)による追加要因だけ,最大軸速度が増加する。
したがって,速度監視スレッシュホールド値をプログラムする際,以下の
法則を適用しなければならない:
MD: AX_VELO_LIMIT[n] > MD: MAX_AX_VELO * (1,1 ... 1,15 + MD:
COMP_ADD_VELO_FACTOR)
• スピンドルについては,各ギアについて,
MD: GEAR_STEP_MAX_VELO_LIMIT[n]
(ギア最大速度)より 10 ~ 15% 上の値を選ぶべきである。
マシンデータの添字 [n] は次のように記載する:[Control parameter set no.]:
0~5
制御パラメータセットの効果については以下を参照のこと。
参照:1.8 位置指令単位と検出単位(G2)
36220
MD 番号
CTRLOUT_LIMIT_TIME[n]
速度指令監視の遅延時間
初期設定:0.0
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:秒
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
この MD は,モニタが応答する前に,速度指令が限界 CTRLOUT_LIMIT[n]
(最大速度指令)に留まる時間を定義するために設定される。監視機能は常時
アクティブである(したがってこのマシンデータも常時アクティブである)。
限界に達すると,位置制御ループが非線形になる。速度指令制限を受ける軸
が輪郭の作成に関連している場合は,輪郭誤差が生じる。したがって,MD の
デフォルト値は 0,すなわち,速度指令が限界に達すると監視が応答する。
マシンデータの添字 [n] は次のように記載する:[Setpoint branch]: 0
1-138
36300
MD 番号
ENC_FREQ_LIMIT[n]
エンコーダリミット周波数
初期設定:300000
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:Hz
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
エンコーダのリミット周波数がこの MD に入力される。
各軸ごとに 2 つのエンコーダを使用できる。アクティブなエンコーダは IS
"Position measuring system 1/2" (位置測定系 1/2)
(DB31, ... DBX1.5 または DBX1.6) によって決まる。
マシンデータの添字 [n] は次のように記載する:[Encoder no.]: 0 or 1
36310
MD 番号
ENC_ZERO_MONITORING[n]
起点位置監視
初期設定:0, 0
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:-
データタイプ:DWORD
適用開始 SW バージョン:1.1
意味:
このマシンデータを使って起点位置監視が起動され,許容されない起点位置
エラー数が定義される。
0:
起点位置監視 OFF,エンコーダハードウェア監視 ON
1 ~ 99, > 100:
その後モニタが応答しなければならない起点位置エラーの検出数
100:
起点位置監視 OFF,エンコーダハードウェア監視
OFF マシンデータの添字 [n] はエンコーダ番号 0 または 1 を表す。
例:
ENC_ZERO_MONITORING[n] = 1 => モニタが 1 番目のエラーに応答する。
ENC_ZERO_MONITORING[n] = 2 => 1 番目のエラーは許容される。モニタは 2
番目のエラーに応答する。
ENC_ZERO_MONITORING[n] = 3 => 1 番目と 2 番目のエラーは許容される。
モニタは 3 番目のエラーに応答する。
エンコーダのスイッチが入ると,起点位置エラーが "0" にリセットされる。
例外,エラー
起点位置モニタは絶対値エンコーダでは切っておくこと。
(ENC_ZERO_MONITORING[n] = 0)
1-139
36400
MD 番号
CONTOUR_TOL
輪郭公差範囲監視
初期設定:1.0
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
追従誤差偏差の最大公差範囲
真の値と予想実際値との許容偏差がこの MD に入力される。
正常な制御プロセス(切削開始時等)で起こるおそれのあるわずかな速度変
動のために,追従誤差監視機能が誤って動作しないように公差を定義する。
この MD は,位置コントローラゲインに合っていなければならない。
フィードフォワード制御の場合は,制御されるシステムモデルの精密さ
MD: EQUIV_SPEEDCTRL_TIME (速度ループフィードフォワード制御用等価
時定数)
,および,許容加速率と速度に合っていなければならない。
参照
1.2.2 「■輪郭監視」
36600
MD 番号
BRAKE_MODE_CHOICE
ハードウェアリミットスイッチでの減速動作
初期設定:1
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:-
データタイプ:BYTE
適用開始 SW バージョン:1.1
意味:
軸が移動する間に軸別のハードウェアリミットスイッチの立上がりエッジが
確認されると,軸が直ちに減速する。
使用される減速タイプがこのマシンデータに定義される。
Value = 0:
MD: MAX_AX_ACCEL (軸加速度)に定義された加速度にしたがって制御さ
れた減速
Value = 1:
追従誤差を減少させる急速減速(指令 = 0 で定義される)
関連性
IS "Hardware limit switch plus or minus" (ハードウェアリミットスイッチプラス
またはマイナス)(DB31, ... DBX12.1 または DBX12.0)
1-140
36610
MD 番号
AX_EMERGENCY_STOP_TIME
エラー状態の制動傾斜長
初期設定:0.05
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:秒
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
送り軸:
以下の監視機能が応答すると,問題の軸が速度指令の制動傾斜にしたがって
急停止する(位置制御ループは開ループ)
。
• 非常停止:
• 追従誤差監視
• 位置決め監視
• ゼロ速度監視
• クランピング監視
• 速度指令監視
• 実速度監視
• エンコーダリミット周波数監視(速度制御されたスピンドルでの監視を除く)
• 起点位置監視
• 輪郭トンネル監視
エンコーダのリミット周波数を超えると,実際値として速度指令が NC の基
本画面に表示される。
速度基本画面を最大値から指令 = 0 まで減らすのに必要な時間を MD 36610 に
入力すること。軸を停止させるのにかかる時間は監視が応答する時点での実
際速度指令に依存する。
MD36210
CTRLOUT_LIMIT
実際速度
指令など
軸が停止するまでの
実際の時間
図 1.28 エラー状態の制動傾斜
スピンドル:
位置制御がアクティブでないスピンドルの場合,速度制御中のスピンドルが,
エンコーダの周波数監視機能が応答しても(すなわち,有効な実際値情報が
喪失しても)
,急停止することなく回転しつづけることがある。エンコーダが
アクティブであれば,速度指令モニタはアクティブであるが,実際速度モニ
タ(MD 36200)はアクティブではない。スピンドル速度指令リミットは制限
を行うだけでアラームは出さない。速度指令は最大速度(MD 35100)に制限
され,IS "Programmed speed too high" (プログラムされた速度が高すぎる)に
表示される。
実際値が得られないので,現在速度が表示できない。
1-141
36610
MD 番号
AX_EMERGENCY_STOP_TIME
エラー状態の制動傾斜長
意味:
補間軸が関与する場合,減速区間での輪郭の維持は保証されない。
(注)
エラー状態での制動ランプ期間の値を高く設定しすぎている場合,軸/スピ
ンドルがまだ移動中でもサーボイネーブルがキャンセルされる。この場合,
速度指令が 0 になって軸/スピンドルが急停止する。したがって,MD:
AX_EMERGENCY_STOP_TIME で設定された時間は
MD:SERVO_DISABLE_DELAY_TIME(サーボイネーブルのカット遅延時間
OFF)で設定された時間より小さくすべきである。
MD 36620: SERVO_DISABLE_DELAY_TIME
サーボイネーブルのカット遅延時間 OFF
関連性
MD 36210: CTRLOUT_LIMIT
最大速度指令
■ プロテクションゾーン
なし
1-142
■ 軸/スピンドル別セッティングデータ
■ 軸監視機能
43400
SD 番号
WORKAREA_PLUS_ENABLE
ワークエリアリミットがプラス方向にアクティブ
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:即時
保護レベル:MMC-MD 9220
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:1.1
意味:
1:
当該軸のワークエリアリミットがプラス方向にアクティブとなる
0:
当該軸のワークエリアリミットがプラス方向に OFF である
このセッティングデータは,ワークエリアリミットの起動/停止をオペレー
タパネルの "Parameters" オペレーションエリアからパラメータ化される。
この SD は次の場合は無意味
G コード:WALIMOF
43410
SD 番号
WORKAREA_MINUS_ENABLE
ワークエリアリミットがマイナス方向にアクティブ
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:即時
保護レベル:MMC-MD 9220
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:1.1
意味:
1:
当該軸のワークエリアリミットがマイナス方向にアクティブとなる
0:
当該軸のワークエリアリミットがマイナス方向に OFF である
この設定データは,ワークエリアリミットの起動/停止を,オペレータパネ
ルの "Parameters" オペレーションエリアからパラメータ化される。
この SD は次の場合は無意味
G コード:WALIMOF
43420
SD 番号
WORKAREA_LIMIT_PLUS
ワークエリアリミットプラス
初期設定:100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:即時
保護レベル:MMC-MD 9220
単位:mm
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
当該軸のプラス方向に基本座標系に定義されたワークエリアを,軸方向の
ワークエリアリミットによって制限できる。
設定データはオペレータパネルの "Parameters" オペレーションエリアから変更
できる。
プラスのワークエリアリミットはプログラム中で G26 を使って変更できる。
この SD は次の場合は無意味
G コード:WALIMOF
関連性
SD 43400: WORKAREA_PLUS_ENABLE
1-143
43430
SD 番号
WORKAREA_LIMIT_MINUS
ワークエリアリミットマイナス
初期設定:- 100 000 000
最小入力リミット:***
最大入力リミット:***
変更は直ちに有効となる:即時
保護レベル:MMC-MD 9220
単位:mm
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
当該軸のマイナス方向に基本座標系に定義されたワークエリアを,軸方向の
ワークエリアリミットによって制限できる。
設定データはオペレータパネルの "Parameters" オペレーションエリアから変更
できる。
マイナスのワークエリアリミットはプログラム中で G25 を使って変更できる。
この SD は次の場合は無意味
G コード:WALIMOF
関連性
SD 43410: WORKAREA_MINUS_ENABLE
■ プロテクションゾーン
なし
1-144
1.2.5 信号の説明
■ 軸/スピンドル別信号
■ 軸監視機能
軸への信号 (DB31, 32, ...)
軸からの信号 (DB31, 32, ...)
軸 3
軸 2
軸 1
クランピングアクティブ (DBX2.3)
ハードウェアリミットスイッチプラス
(DBX12.1)
ハードウェアリミットスイッチマイナス
(DBX12.0)
エンコーダリミット周波数超過 1
(DBX60.2)
軸監視
機能
第 2 ソフトウェアリミットスイッチプラス
(DBX12.3)
第 2 ソフトウェアリミットスイッチマイナス
(DBX12.2)
エンコーダリミット周波数超過 2
(DBX60.3)
図 1.29 軸監視機能用 PLC インタフェース信号
軸/スピンドルへの信号
DB31, ...
DBX2.3
データブロック
Clamping active(クランピングアクティブ)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
クランピングアクティブ
クランピング監視機能が起動される。
信号ステータス 0 あるいは信号
遷移 1 → 0
クランピング終了
クランピング監視機能からゼロ速度監視機能に切換わる。
関連性
MD 36050: CLAMP_POS_TOL ( クランピング公差 )
参照
1.2.2 「■クランピング監視」
DB31, ...
DBX3.6
データブロック
Velocity/spindle speed limitation(速度/スピンドル速度制限)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
NCK が,速度/スピンドル速度を MD 35160: SPIND_EX-TERN_VELO_LIMIT
に設定された限界値に制限する。
信号ステータス 0 あるいは信号
遷移 1 → 0
アクティブの制限なし
関連性
MD 35100: SPIND_VELO_LIMIT ( 最大スピンドル速度 )
SD 43220: SPIND_MAX_VELO_G26 ( プログラムスピンドル速度制限 G26)
SD 43230: SPIND_MAX_VELO_LIMIT ( プログラムスピンドル速度制限 G96)
軸/スピンドルへの信号 (PLC → NCK)
信号がアクティブとなる最初の SW
バージョン:1.1
信号
1-145
信号がアクティブとなる最初の SW
バージョン:1.1
DB31, ...
DBX12.1 and 12.0
データブロック
Hardware limit switches plus and minus
(ハードウェアリミットスイッチプラスおよびマイナス)
軸/スピンドルへの信号 (PLC → NCK)
信号がアクティブとなる最初の SW
バージョン:1.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
マシン軸移動レンジの各端部にスイッチを 1 個づつ取り付けることができ,
このスイッチにアプローチすると,PLC を介して NC に信号 "Hardware limit
switch plus or minus" (ハードウェアリミットスイッチプラスまたはマイナス)
が出される。
設定通りに信号が確認されると,アラーム 021614 "Hardware limit switch + or -"
(ハードウェアリミットスイッチプラスまたはマイナス)が出力され,軸が直
ちに減速する。制動モードは MD 36600: BRAKE_MODE_CHOICE ( ハード
ウェアリミットスイッチでの減速動作 ) に定義される。信号 "Hardware limit
switch" (ハードウェアリミットスイッチ)だけでなく,サーボイネーブルも
キャンセルされた場合は,軸が機能説明 "Various Interface Signals A2" の記載通
り反応する。
信号ステータス 0 あるいは信号
遷移 1 → 0
正常状態,ハードウェアリミットスイッチがトリガされない。
関連性
MD 36600: BRAKE_MODE_CHOICE
( ハードウェアリミットスイッチでの減速動作 )
DB31, ...
DBX12.3 and 12.2
データブロック
エッジ評価:なし
2nd software limit switch plus or minus
(第 2 ソフトウェアリミットスイッチプラスおよびマイナス)
軸/スピンドルへの信号 (PLC → NCK)
信号更新:周期的
信号がアクティブとなる最初の SW
バージョン:1.1
信号ステータス 1 あるいは信号 プラスまたはマイナス方向の第 2 ソフトウェアリミットスイッチはアクティブ
遷移 0 → 1
となる。プラスまたはマイナス方向の第 1 ソフトウェアリミットスイッチはア
クティブとならない。第 1 ソフトウェアリミットスイッチ(プラスおよびマイ
ナス)だけでなく,第 2 ソフトウェアリミットスイッチ(プラスおよびマイナ
ス)もこれらのインタフェース信号で起動できる。位置は MD 36130:
POS_LIMIT_PLUS2, MD 36120 POS_LIMIT_MINUS2 (第 2 ソフトウェアリミッ
トスイッチプラス,第 2 ソフトウェアリミットスイッチマイナス)を使って定
義される。
信号ステータス 0 あるいは信号 プラスまたはマイナス方向の第 1 ソフトウェアリミットスイッチはアクティブ
遷移 1 → 0
となる。プラスまたはマイナス方向の第 2 ソフトウェアリミットスイッチはア
クティブとならない。
関連性
MD 36110: POS_LIMIT_PLUS, MD 36130: POS_LIMIT_PLUS2,
MD 36100: POS_LIMIT_MINUS, MD 36120: POS_LIMIT_MINUS2,
( ソフトウェアリミットスイッチプラス,ソフトウェアリミットスイッチマイ
ナス )
1-146
軸/スピンドルからの信号
DB31, ...
DBX60.2 and 60.3
データブロック
Encoder limit frequency exceeded 1 (エンコーダリミット周波数超過 1)
Encoder limit frequency exceeded 2 (エンコーダリミット周波数超過 2)
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
MD 36300: ENC_FREQ_LIMIT ( エンコーダリミット周波数 ) に設定されたリ
ミット周波数を超えた。関連する位置測定系の基準点が無くなった (IS
"Referenced/synchronized is in signal state 0" - 基準化/同期化が信号ステータス
0)。もはや正しい位置閉ループ制御ができない。スピンドルが速度制御ルー
プで回転し続ける。軸が速度指令ランプにしたがって急停止する(位置制御
ループは開ループ)
。
信号ステータス 0 あるいは信号
遷移 1 → 0
もはや MD 36300: ENC_FREQ_LIMIT に設定されたリミット周波数を超えるこ
とはない ( エンコーダ周波数 _ ENC_FREQ_LIMIT_LOW)。
信号遷移 1 → 0 を達成するため,エンコーダ周波数が MD 36302
ENC_FREQ_LIMIT_LOW の設定値未満に低下しているはずである。
■ プロテクションゾーン
なし
1-147
信号がアクティブとなる最初の SW
バージョン:1.1
■ チャンネル別信号
■ 軸監視機能
なし
■ プロテクションゾーン
チャンネル 2
チャンネル 1
マシン関連プロテクションゾーン 1
起動 (DBX8.0)
チャンネルからの信号 (DB21, 22, ...)
マシン関連プロテクションゾーン 1 信号
切替 (DBX272.0)
…
チャンネルへの信号 (DB21, 22, ...)
…
マシン関連プロテクションゾーン 10 信号
切替 (DBX273.1)
マシン関連プロテクションゾーン 10
チャンネル関連プロテクションゾーン 1 信号
切替 (DBX274.0)
…
起動 (DBX8.0)
チャンネル関連プロテクションゾーン 10 信号
切替 (DBX275.1)
マシン関連プロテクションゾーン 1 違反
(DBX276.0)
…
…
チャンネル関連プロテクションゾーン 1
起動 (DBX10.0)
軸監視
機能
マシン関連プロテクションゾーン 10 違反
(DBX277.1)
プロテクションゾーンをイネー ブル
チャンネル別プロテクションゾーン 1 違反
(DBX278.0)
(DBX1.1)
…
チャンネル関連プロテクションゾーン 10
起動 (DBX11.1)
チャンネル別プロテクションゾーン 10 違反
(DBX279.1)
図 1.30 「プロテクションゾーン」用チャンネル別 PLC インタフェース信号
チャンネルへの信号
DB21-28
DBX1.1
データブロック
Enable protection zone (プロテクションゾーンをイネーブル)
エッジ評価:あり
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
この信号のプラスのエッジが現われると,プロテクションゾーンがイネーブ
ルにされ,アクティブなアラームがリセットされる。
同一のプロテクションゾーンへのモーションを開始できる。
モーション開始コマンドが出されると,プロテクションゾーンがイネーブル
にされ,IS "Machine or channel-specific protection zone violated" (マシン別また
はチャンネル別プロテクションゾーン違反)がセットされ,軸モーションが
開始される。イネーブルにされたプロテクションゾーンに至らないモーショ
ンを開始した場合,イネーブル信号は無効になる。
信号ステータス 0 あるいは信号
遷移 1 → 0
効果なし
アプリケーション例
以下の場合に,これらの信号を使ってプロテクションゾーンをイネーブルに
できる。
- 現在位置がプロテクションゾーン内にある場合 ( アラーム 2 がアクティブ )
チャンネルへの信号 (PLC → NCK)
信号がアクティブとなる最初の SW
バージョン:3.1
- プロテクションゾーンリミットでモーションを開始する予定の場合 ( アラー
ム 1 または 2 がアクティブ )
1-148
DB21, ...
DBX8.0 - 9.1
データブロック
Activate machine-related protection zone 1 ( ... 10)
(マシン関連プロテクションゾーン 1 ( ... 10) 起動)
チャンネルへの信号 (PLC → NCK)
信号がアクティブとなる最初の SW
バージョン:2.1
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
信号切替されたマシン関連プロテクションゾーン 1 (...10) が PLC ユーザプロ
グラムによって起動される。
プロテクションゾーンは直ちにアクティブになる。
パートプログラム中で信号切替されているプロテクションゾーンしか起動さ
れない。
信号ステータス 0 あるいは信号
遷移 1 → 0
信号切替されたマシン関連プロテクションゾーン 1 (...10) が PLC ユーザプロ
グラムによって停止される。
プロテクションゾーンは直ちに停止する。
PLC によって起動され,NC パートプログラム中で信号切替されているプロテ
クションゾーンしか停止されない。
アプリケーション例
DB21, ...
DBX10.0 - 11.1
データブロック
例えば,センサが作業レンジ内に移動する前に,それに関連するマシン関連
プロテクションゾーンを起動することができる。
Activate channel-specific protection zone 1 ( ... 10)
(チャンネル別プロテクションゾーン 1 (...10) 起動)
チャンネルへの信号 (PLC → NCK)
信号がアクティブとなる最初の SW
バージョン:2.0
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
信号切替されたチャンネル別プロテクションゾーン 1 (...10) が PLC ユーザプ
ログラムによって起動される。
プロテクションゾーンは直ちにアクティブとなる。
パートプログラム中で信号切替されているプロテクションゾーンしか起動さ
れない。
信号ステータス 0 あるいは信号
遷移 1 → 0
信号切替されたチャンネル別プロテクションゾーン 1 (...10) が PLC ユーザプ
ログラムによって停止される。
プロテクションゾーンは直ちに停止される。
PLC によって起動され,NC パートプログラム中で信号切替されているプロテ
クションゾーンしか停止されない。
アプリケーション例
例えば,同期スピンドルが作業レンジ内に移動する前に,それに関連するマ
シン関連プロテクションゾーンを起動することができる。
1-149
チャンネルからの信号
DB21, ...
DBX272.0 - 273.1
データブロック
Machine-related protection zone 1 (...10) pre-activated
(マシン関連プロテクションゾーン 1 (...10) 信号切替)
チャンネルからの信号 (NCK → PLC)
信号がアクティブとなる最初の SW
バージョン:2.0
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
カレントブロックでマシン関連プロテクションゾーン 1 (...10) が信号切替され
る。
(パートプログラム中での信号切替)
プロテクションゾーンは,IS "Activate machine-related protection zone 1 (...10)"
(マシン関連プロテクションゾーン 1 (...10) 起動)(DB21, ... DBX8.0 ~ 9.1) を介
して PLC ユーザープログラム中で起動または停止できる。
信号ステータス 0 あるいは信号
遷移 1 → 0
カレントブロックでマシン関連プロテクションゾーン 1 (...10) が停止される。
(パートプログラム中での停止)
したがって,プロテクションゾーンは,IS "Activate machine-related protection
zone 1 (...10)" (マシン関連プロテクションゾーン 1 (...10) 起動)(DB21, ...
DBX8.0 ~ 9.1) を介して PLC ユーザープログラム中で,起動または停止する
ことができない。
関連性
IS "Activate machine-related protection zone 1 (...10)"
(マシン関連プロテクションゾーン 1 (...10) 起動)(DB21, ... DBX8.0 ~ 9.1)
DB21, ...
DBX274.0 - 275.1
データブロック
Channel-specific protection zone 1 (...10) pre-activated
(チャンネル別プロテクションゾーン 1 (...10) 信号切替)
チャンネルからの信号 (NCK → PLC)
信号がアクティブとなる最初の SW
バージョン:2.0
エッジ評価:なし
信号更新:周期的
信号ステータス 1 あるいは信号
遷移 0 → 1
カレントブロックでチャンネル別プロテクションゾーン 1 (...10) が信号切替さ
れる。
( パートプログラム中での信号切替 )
プロテクションゾーンは,IS "Activate channel-specific protection zone 1 (...10)"
(チャンネル別プロテクションゾーン 1 (...10) 起動)(DB21, ... DBX10.0 ~ 11.1)
を介して PLC ユーザープログラム中で起動または停止できる。
信号ステータス 0 あるいは信号
遷移 1 → 0
カレントブロックでチャンネル別プロテクションゾーン 1 (...10) が停止され
る。
(パートプログラム中での停止)
したがって,プロテクションゾーンは,IS "Activate channel-specific protection
zone 1 (...10)" (チャンネル別プロテクションゾーン 1 (...10) 起動)(DB21, ...
DB10.0 ~ 11.1) を介して PLC ユーザープログラム中で,起動または停止する
ことができない。
関連性
IS "Activate channel-specific protection zone 1 (...10)"
(チャンネル別プロテクションゾーン 1 (...10) 起動)(DB21, ... DB10.0 ~ 11.1)
1-150
DB21, ...
DBX276.0 - 277.1
データブロック
エッジ評価:なし
Machine-related protection zone 1 (...10) violated
(マシン関連プロテクションゾーン 1 (...10) 違反)
チャンネルからの信号 (NCK → PLC)
信号更新:周期的
信号がアクティブとなる最初の SW
バージョン:2.0
信号ステータス 1 あるいは信号
遷移 0 → 1
• カレントブロックまたはカレント JOG 動作で,起動しているマシン関連プ
ロテクションゾーン 1 (...10) に違反している。
• 信号切替されているマシン関連プロテクションゾーン 1 (...10) が PLC に
よって起動されると,カレントブロックでそのマシン関連プロテクション
ゾーンに違反する。
信号ステータス 0 あるいは信号
遷移 1 → 0
• カレントブロックで,起動しているマシン関連プロテクションゾーン 1
(...10) に違反していない。
• 信号切替されているマシン関連プロテクションゾーン 1 (...10) が PLC に
よって起動されても,カレントブロックでそのマシン関連プロテクション
ゾーンに違反しない。
アプリケーション例
DB21, ...
DBX278.0 - 279.1
データブロック
エッジ評価:なし
この IS を使って,可動パートが作業レンジ内に移動する前に,その可動パー
トのマシン関連プロテクションゾーン内にツールまたはワークがあるかどう
かを調べることができる。
Channel-specific protection zone 1 (...10) violated
(チャンネル別プロテクションゾーン 1 (...10) 違反)
チャンネルからの信号 (NCK → PLC)
信号更新:周期的
信号がアクティブとなる最初の SW
バージョン:2.0
信号ステータス 1 あるいは信号
遷移 0 → 1
• カレントブロックで,起動しているチャンネル別プロテクションゾーン
(...10) に違反している。
• 信号切替されているチャンネル別プロテクションゾーン 1 (...10) が PLC に
よって起動されると,カレントブロックでそのチャンネル別プロテクショ
ンゾーンに違反する。
信号ステータス 0 あるいは信号
遷移 1 → 0
• カレントブロックで,起動しているチャンネル別プロテクションゾーン 1
(...10) に違反していない。
• 信号切替されているチャンネル別プロテクションゾーン 1 (...10) が PLC に
よって起動されても,カレントブロックでそのチャンネル別プロテクショ
ンゾーンに違反しない。
アプリケーション例
この IS を使って,可動パートが作業レンジ内に移動する前に,その可動パー
トのチャンネル別プロテクションゾーン内にツールまたはワークがあるかど
うかを調べることができる。
1-151
1.2.6 例
■ 軸監視機能
なし
■ プロテクションゾーン
■ プロテクションゾーンの定義と起動
要求事項
旋盤の場合,以下の内部プロテクションゾーンを定義するものとします。
• スピンドルチャックのマシン関連およびワーク関連プロテクションゾーン(第
三次元での制限なし)
• ワークのチャンネル別プロテクションゾーン(第三次元での制限なし)
• ツールホルダのチャンネル別,ツール関連プロテクションゾーン(第三次元での
制限なし)
ワーク用プロテクションゾーンを定義するため,ワーク原点をマシン原点に配置
します。
プロテクションゾーンは,起動すると,Z 軸のプラス方向に 100 mm オフセットさ
れます。
開始点
ツールホルダ
スピンドルチャックの
プロテクションゾーン
開始点
開始点
ドリル
ワークの
プロテクションゾーン
図 2.31 旋盤に関するプロテクションゾーンの例
1-152
ツールホルダの
プロテクションゾーン
パートプログラム中でのプロテクションゾーンの定義
関連するパートプログラム:
DEF INT AB
NPROTDEF(0,FALSE,0,0,0) ; スピンドルチャックのプロテクションゾーン
G18
G01 X100 Z0
G01 X-100 Z0
G01 X-100 Z110
G01 X100 Z110
G01 X100 Z0
EXECUTE(AB)
CPROTDEF(0,FALSE,0,0,0) ; ワークのプロテクションゾーン
G18
G01 X80 Z0
G01 X-80 Z0
G01 X-80 Z40
G01 X80 Z40
G01 X80 Z0
EXECUTE(AB)
CPROTDEF(1,TRUE,0,0,0) ; ツールホルダのプロテクションゾーン
G18
G01 X0 Z-50
G01 X-190 Z-50
G03 X-210 Z-30 I20 J0
G01 X-210 Z20
G01 X0 Z50
G01 X0 Z-50
EXECUTE(AB)
システム変数によるプロテクションゾーンの定義
関連するシステム変数の設定値:
$SN_PA_T_W[1]=0 ; スピンドルチャックのプロテクションゾーン
$SN_PA_ORI[0]=1
$SN_PA_LIM_3DIM[0]=0
$SN_PA_PLUS_LIM[0]=0
$SN_PA_MINUS_LIM[0]=0
$SN_PA_CONT_NUM[0]=5
$SN_PA_CONT_TYP[0,0]=1
$SN_PA_CONT_ORD[0,0]=100
1-153
$SN_PA_CONT_ABS[0,0]=0
$SN_PA_CONT_TYP[0,1]=1
$SN_PA_CONT_ORD[0,1]=-100
$SN_PA_CONT_ABS[0,1]=0
$SN_PA_CONT_TYP[0,2]=1
$SN_PA_CONT_ORD[0,2]=-100
$SN_PA_CONT_ABS[0,2]=110
$SN_PA_CONT_TYP[0,3]=1
$SN_PA_CONT_ORD[0,3]=100
$SN_PA_CONT_ABS[0,3]=110
$SN_PA_CONT_TYP[0,4]=1
$SN_PA_CONT_ORD[0,4]=100
$SN_PA_CONT_ABS[0,4]=0
$SC_PA_TW[0]=0 ; ワークのプロテクションゾーン
$SC_PA_ORI[0]=1
$SC_PA_LIM_3DIM[0]=0
$SC_PA_PLUS_LIM[0]=0
$SC_PA_MINUS_LIM[0]=0
$SC_PA_CONT_NUM[0]=5
$SC_PA_CONT_TYP[0,0]=1
$SC_PA_CONT_ORD[0,0]=80
$SC_PA_CONT_ABS[0,0]=0
$SC_PA_CONT_TYP[0,1]=1
$SC_PA_CONT_ORD[0,1]=-80
$SC_PA_CONT_ABS[0,1]=0
$SC_PA_CONT_TYP[0,2]=1
$SC_PA_CONT_ORD[0,2]=-80
$SC_PA_CONT_ABS[0,2]=40
$SC_PA_CONT_TYP[0,3]=1
$SC_PA_CONT_ORD[0,3]=80
$SC_PA_CONT_ABS[0,3]=40
$SC_PA_CONT_TYP[0,4]=1
$SC_PA_CONT_ORD[0,4]=80
$SC_PA_CONT_ABS[0,4]=0
$SC_PA_T_W[1]=3;ツールホルダのプロテクションゾーン
$SC_PA_ORI[1]=1
$SC_PA_LIM_3DIM[1]=0
$SC_PA_PLUS_LIM[1]=0
$SC_PA_MINUS_LIM[1]=0
$SC_PA_CONT_NUM[1]=6
1-154
$SC_PA_CONT_TYP[1,0]=1
$SC_PA_CONT_ORD[1,0]=0
$SC_PA_CONT_ABS[1,0]=-50
$SC_PA_CONT_TYP[1,1]=1
$SC_PA_CONT_ORD[1,1]=-190
$SC_PA_CONT_ABS[1,1]=-50
$SC_PA_CONT_TYP[1,2]=3
$SC_PA_CONT_ORD[1,2]=-210
$SC_PA_CONT_ABS[1,2]=-30
$SC_PA_CENT_ORD[1,2]=-190
$SC_PA_CENT_ABS[1,2]=-30
$SC_PA_CONT_TYP[1,3]=1
$SC_PA_CONT_ORD[1,3]=-210
$SC_PA_CONT_ABS[1,3]=20
$SC_PA_CONT_TYP[1,4]=1
$SC_PA_CONT_ORD[1,4]=0
$SC_PA_CONT_ABS[1,4]=50
$SC_PA_CONT_TYP[1,5]=1
$SC_PA_CONT_ORD[1,5]=0
$SC_PA_CONT_ABS[1,5]=-50
起動
以下のサブプログラムにより,1 つのチャンネルにある 3 つのプロテクションゾー
ンがパートプログラム中で起動されます。
NPROT(1,2,0,0,0) ;スピンドルチャックのプロテクションゾーン
CPROT(1,2,0,0,100); ワークのプロテクションゾーン
; プロテクションゾーンは,起動時,Z 軸沿いに 100 mm シフトされる
CPROT(2,2,0,0,0) ; ツールホルダのプロテクションゾーン
1-155
1.2.7 データフィールド,リスト
■ 軸/スピンドル別インタフェース信号
■ 軸監視機能
DB 番号
ビット,バイト
軸/スピンドル別
1.5 / 1.6
31, ...
名称
位置測定系 1 / 位置測定系 2
31, ...
2.3
クランピングアクティブ
31, ...
3.6
速度/スピンドル速度制限
31, ...
12.0 / 12.1
ハードウェアリミットスイッチマイナス/ハードウェアリミットス
イッチプラス
31, ...
12.2 / 12.3
第 2 ソフトウェアリミットスイッチマイナス/第 2 ソフトウェアリ
ミットスイッチプラス
31, ...
60.2 / 60.3
エンコーダリミット周波数超過 1 /エンコーダリミット周波数超過 2
31, ...
60.4 / 60.5
基準化/同期化 1 /基準化/同期化 2
■ プロテクションゾーン
なし
1-156
参照
1.1 (A2)
1.16 (R1)
■ チャンネル別インタフェース信号
■ 軸監視機能
なし
■ プロテクションゾーン
DB 番号
ビット,バイト
名称
チャンネルへのチャンネル別信号
1.1
21, ...
プロテクションゾーンのイネーブル
21, ...
8.0
21, ...
8.7
マシン関連プロテクションゾーン 8 起動
21, ...
9.0
マシン関連プロテクションゾーン 9 起動
21, ...
9.1
マシン関連プロテクションゾーン 10 起動
21, ...
10.0
マシン関連プロテクションゾーン 1 起動
:
:
チャンネル別プロテクションゾーン 1 起動
:
:
21, ...
10.7
チャンネル別プロテクションゾーン 8 起動
21, ...
11.0
チャンネル別プロテクションゾーン 9 起動
21, ...
11.1
チャンネル別プロテクションゾーン 10 起動
チャンネルからのチャンネル別信号
272.0
21, ...
マシン関連プロテクションゾーン 1 信号切替
:
:
21, ...
272.7
マシン関連プロテクションゾーン 8 信号切替
21, ...
273.0
マシン関連プロテクションゾーン 9 信号切替
21, ...
273.1
マシン関連プロテクションゾーン 10 信号切替
21, ...
274.0
チャンネル別プロテクションゾーン 1 信号切替
:
:
21, ...
274.7
チャンネル別プロテクションゾーン 8 信号切替
21, ...
275.0
チャンネル別プロテクションゾーン 9 信号切替
21, ...
275.1
チャンネル別プロテクションゾーン 10 信号切替
21, ...
276.0
マシン関連プロテクションゾーン 1 違反
:
:
21, ...
276.7
マシン関連プロテクションゾーン 8 違反
21, ...
277.0
マシン関連プロテクションゾーン 9 違反
21, ...
277.1
マシン関連プロテクションゾーン 10 違反
21, ...
278.0
チャンネル別プロテクションゾーン 1 違反
:
:
21, ...
278.7
チャンネル別プロテクションゾーン 8 違反
21, ...
279.0
チャンネル別プロテクションゾーン 9 違反
21, ...
279.1
チャンネル別プロテクションゾーン 10 違反
1-157
参照
■ 一般マシンデータ
■ 軸監視機能
なし
■ プロテクションゾーン
番号
識別子
名称
参照
マシン関連プロテクションゾーンのファ
イル数
2.14 (S7)
一般事項 ($MN_ ... )
18190
MM_NUM_PROTECT_AREA_NCK
1-158
■ 軸/スピンドル別マシンデータ
■ 軸監視機能
番号
識別子
名称
参照
軸/チャンネル別 ($MA_ ... )
30310
ROT_IS_MODULO
回転軸およびスピンドルのモジューロ変換
2.12 (R2)
32200
POSCTRL_GAIN [n]
サーボゲイン係数
1.8 (G2)
32250
RATED_OUTVAL
定格出力電圧
1.8 (G2)
32260
RATED_VELO
定格モータ速度
1.8 (G2)
32300
MAX_AX_ACCEL
軸加速度
1.4 (B2)
32800
EQUIV_CURRCTRL_TIME [n]
フィードフォワード制御用等価時定数電流制御ループ
2.5 (K3)
32810
EQUIV_SPEEDCTRL_TIME [n]
フィードフォワード制御用等価時定数速度制御ループ
2.5 (K3)
32910
DYN_MATCH_TIME [n]
動的マッチング用時定数
1.8 (G2)
35160
SPIND_EXTERN_VELO_LIMIT
PLC によるスピンドル速度制限
1.17 (S1)
36000
STOP_LIMIT_COARSE
正確停止(粗)
1.3 (B1)
36010
STOP_LIMIT_FINE
正確停止(微)
1.3 (B1)
36020
POSITIONING_TIME
時間遅延正確停止(微)
36030
STANDSTILL_POS_TOL
ゼロ速度公差
36040
STANDSTILL_DELAY_TIME
遅延時間ゼロ速度監視
36050
CLAMP_POS_TOL IS
"Clamping active" (クランピングアクティブ)による
クランピング公差
36060
STANDSTILL_VELO_TOL
最大速度 "Axis/spindle stationary"(軸/スピンドル静止)
36100
POS_LIMIT_MINUS
第 1 ソフトウェアリミットスイッチマイナス
36110
POS_LIMIT_PLUS
第 1 ソフトウェアリミットスイッチプラス
36120
POS_LIMIT_MINUS2
第 2 ソフトウェアリミットスイッチマイナス
36130
POS_LIMIT_PLUS2
第 2 ソフトウェアリミットスイッチプラス
36610
AX_EMERGENCY_STOP_TIME
エラー状態の制動ランプ長
36200
AX_VELO_LIMIT [n]
速度監視のスレッシュホールド値
36210
CTRLOUT_LIMIT [n]
最大速度指令
36220
CTRLOUT_LIMIT_TIME[n]
速度指令監視の遅延時間
36300
ENC_FREQ_LIMIT[n]
エンコーダリミット周波数
36310
ENC_ZERO_MONITORING [n]
起点位置監視
36400
CONTOUR_TOL
公差範囲輪郭監視
36500
ENC_CHANGE_TOL
位置実際値切換の最大公差
36600
BRAKE_MODE_CHOICE
ハードウェアリミットスイッチでの減速動作
36620
SERVO_DISABLE_DELAY_TIME スイッチオフ遅延サーボイネーブル
■ プロテクションゾーン
なし
1-159
1.1 (A2)
1.8 (G2)
1.8 (G2)
1.1 (A2)
■ チャンネル別マシンデータ
■ 軸監視機能
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
20150
GCODE_RESET_VALUES [n]
G グループのリセット値
21020
WORKAREA_WITH_TOOL_RADIUS
ワークエリアリミットに対するツール半径
の公差
1.10 (K1)
■ プロテクションゾーン
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
28200
MM_NUM_PROTECT_AREA_CHAN
チャンネル別プロテクションゾーンのファイ
ル数
1.14 (S7)
28210
MM_NUM_PROTECT_AREA_ACTIVE
単一チャンネルで同時にアクティブのプロテ
クションゾーンの数
1.14 (S7)
1-160
■ 軸/スピンドル別設定データ
■ 軸監視機能
番号
識別子
名称
軸/スピンドル別 ($SA_ ... )
43400
WORKAREA_PLUS_ENABLE
ワークエリアリミットがプラス方向にアクティブ
43410
WORKAREA_MINUS_ENABLE
ワークエリアリミットがマイナス方向にアクティ
ブ
43420
WORKAREA_LIMIT_PLUS
ワークエリアリミットプラス
43430
WORKAREA_LIMIT_MINUS
ワークエリアリミットマイナス
■ プロテクションゾーン
なし
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいは MMC 101/102/103 を有するシステムのオンラインヘルプ
1-161
参照
1-162
1.3 連続送り,イグザクトストップモードと先読み (B1)
1.3.1 概略説明
連続パス制御を行うために,CNC はブロックごとのパートプログラムを処理しま
す。現在のブロックのファンクションが完了して次のブロックの処理に入ります。
ワークの表面には輪郭精度,処理時間など,様々なブロックチェンジ基準が要求
されます。パス軸がブロックの境目で動作する方法は 2 つあります。1 つはイグザ
クトストップという方法で,すべてのパス軸は次のブロックチェンジが始まる前
に正確な停止基準に従って設定位置に到達しなければなりません。基準を満たす
ためには,パス軸はパス速度をブロックチェンジごとに減少させなければなりま
せん。このためにブロックチェンジが遅くなります。2 つ目は,連続パスモードと
いい,次のブロックに移る際のパス速度の変更を最小限に抑えるために,ブロッ
クの境目におけるパス速度減少を少なくする方法です。
次項のファンクションの説明では,イグザクトストップ,連続パスモード,先読
みファンクションの特徴やオプションについて説明しています。
1.3.2 詳細説明
■ 一般事項
イグザクトストップおよび連続パスモードファンクションは,共通のチャンネル
に割当てられたパス軸を稼働させるものです。補間を要するマシン軸の動的な応
答は同じでなければなりません。つまり,同じ速度においては同じ追従誤差が生
じなければなりません。
パス軸
「パス軸」とは,次のように通過点計算を行う補間器によって制御されるチャンネ
ルに割当てられた全ての加工軸を意味します。
• 全ての軸は同時にスタートする。
• 全ての軸は正しい速度比率で動く。
• 全ての軸はプログラムされた設定位置に同時に到達する。
軸の加速はパス(たとえば円)により異なります。
パス軸は特殊軸(同期軸やワーク回転軸などのようなワークの加工工程に関わる
もの)などのジオメトリ軸である場合もあります。
ジオメトリ軸
ジオメトリ軸はワーク座標系において二次元または三次元領域を表します。
方向軸
これは 5 軸モードで加工平面を基準にしてツールを整列させる軸です。
1-163
チャンネル
チャンネルは,パートプログラムによってサポートされた独立した CNC を示し,
他のチャンネルの動きとは無関係に,マシンの動作はもちろん軸とスピンドルの
動きを調整できます。チャンネルの独立性は次によって保証されます。
• チャンネルごとにアクティブなパートプログラム
• 次のようなチャンネル別インタフェース信号
- NC スタート
- NC ストップ
- リセット
• チャンネルごとに 1 つのフィードレートをオーバライドする
• チャンネルごとに迅速に 1 つのトラバースをオーバライドする
• チャンネル別の評価とアラームの表示
• 次のようなチャンネル別の表示
- 軸の位置
- アクティブな G ファンクション
- アクティブな補助ファンクション
- 現在のプログラムブロック
• チャンネル別テストとパートプログラムの制御
- ブロック
- ドライランフィード
- ブロックの検索
チャンネルファンクションの詳細については下記を参照してください。
参照: 1.10 運転モードの種類とプログラム運転モード (K1)
1-164
■ 速度
軸別速度制限と加速制限はパス軸に適用されます。
フィードレート
プログラムされたフィードレート F はパスフィードレートに対応します。これは
モーダルであり,ミリ/分,インチ/分,度/分で表した速度としてプログラム
されています。速度は G01,G02,G03 の 3 つのモーションタイプについて定義さ
れています。パス軸がフィードレートなしにプログラムされると,アラーム 10860
"No feedrate programmed" (フィードレートがプログラムされていない)が出力さ
れます。
パスフィードレート
パスフィードレートは基本座標系に割当てられた軸に適用されます。パスフィー
ドレートは補間グループ内で動作する軸の幾何学的フィードレートの合計を表し
ます。
フィードレートオーバライド
チャンネルに割当てられたパス軸には共通したフィードレートがオーバライドさ
れます。
急速トラバース
急速トラバース G00 は軸を最高トラバース速度でトラバースします。軸が急速ト
ラバース速度でトラバースすると,最大軸速度が急速トラバース速度を制限しま
す。
急速トラバースオーバライド
チャンネルに割当てられたパス軸には共通した急速トラバースがオーバライドさ
れます。
ゼロサイクルブロック速度
「ゼロサイクル」は,パスの長さがプログラムで設定されたフィードレートと補間
サイクルに基づいて移動できる距離より短いブロックに適用されます。精度上の
理由で,速度はその距離について少なくとも 1 つの補間サイクルが必要となるま
で減少します。速度は次にブロックのパス長を IPO サイクルで割った速度以下に
なります。
1-165
■ イグザクトストップ/連続パスモードの初期設定
ファクション別プログラムコードのないパートプログラムにおいて,「イグザクト
ストップ」(イグザクトストップ基準を含む)または「連続パスモード」ファンク
ションのいずれがアクティブであるかは,MD 20150: GCODE_RESET_VALUES
(G グループの初期設定)の初期設定で指定されています。標準のインストールで
は,ブロックチェンジ基準が「イグザクトストップ(微),G601」であるイグザク
トストップ G60 が初期設定です。
初期設定の方法については,下記を参照してください。
参照: 1.10 運転モードの種類とプログラム運転モード (K1)
■ 位置決め軸を有するブロックチェンジ
パス軸はひとつの NC ブロック中で,パス軸のみまたはそれに位置決め軸を伴って
プログラムされます。位置決め軸はパス補間器ではなく軸補間器で補間するため,
プログラムされた地点に到達するまでの時間がパス軸と異なります。そのためブ
ロックチェンジでは,イグザクトストップとパス軸の連続パスモードの基準だけ
ではなく,位置決め軸のタイプも関連しています。位置決め軸には 2 つのタイプ
があるため,次のようなブロックチェンジの動作が行われます。
• 位置決め軸タイプ POS
ブロックチェンジはすべてのパス軸と位置決め軸がプログラムの終了位置に到
達したときに実行されます。このため,パス軸の連続パスモードは位置決め軸
がパス軸より先に最終位置に到達したときのみ可能になります。
• 位置決め軸タイプ POSA
ブロックチェンジはパス軸がプログラムされた終了位置に到達すると実行され
ます。連続パスモードはそのため制限を受けることなく可能になります。
• 位置決め軸そのものは,常にイグザクトストップ(微)で最終位置に到達する
ため,連続パスモードファンクションとイグザクトストップファンクションと
を区別しません。
参照: 2.10 補助位置決め軸 (P2)
1-166
■ 同期のための停止
イグザクトストップまたは連続パスモードのいずれが選択されていても,ブロッ
クチェンジはパス軸を停止させる同期化プロセスにより遅れが生じることがあり
ます。イグザクトストップモードではパス軸は現在のブロックエンドで停止しま
す。連続パスモードでは,パス軸は次のブロックエンド点で停止しますが,この
点で減速リミット違反を起こすことなく減速できます。次のような同期化手順に
より軸が停止します。
• PLC の確認応答
動作の終了の前後で出力される補助ファンクションについて PLC による確認
応答が必要な場合,軸はブロックエンドで停止します。
• 次のブロックが見当たらない
(DNC オペレーションなどにおいて)次のブロックが十分早く用意できないと
きは,軸はアプローチ可能な最後のブロックの境目で停止します。
• バッファが空である
NC のパートプログラムが前処理実行を主実行と同期させること(バッファを
空にする)を要求する場合,暗示的にブロックに関連した減速やイグザクトス
トップが起こります。
同期化による停止は輪郭違反を引起こしません。しかし停止は,特に連続モード
オペレーションにおいては後退 (backing off) を引起こすので望ましいものではあり
ません。
■ イグザクトストップ
イグザクトストップファンクションでは,すべてのパス軸はプログラムブロック
の終了点に到達しなければなりません。すべてのパス軸がイグザクトストップ基
準に到達したときのみ,ブロックチェンジが実行されます。ブロック遷移の速度
は実質的にゼロです。
• 終了点におけるパス軸は行き過ぎることなく,ほとんど停止するように減速さ
れます。
• イグザクトストップ基準を満たす遅延は,加工時間を延ばします。
• イグザクトストップ基準を満たす遅延は,後退 (backing off) を引起こすことが
あります。
イグザクトストップファンクションの使用は輪郭の精密トラバースに適していま
す。
次の場合はイグザクトストップは適しません。
• 基準に基づく(たとえば,イグザクトストップ(微))輪郭の厳密なトラバー
スは,より速い加工速度を得ようとすると,プログラムされた輪郭から逸脱し
ます。
• 厳密に一定速度が要求される場合。
1-167
イグザクトストップの起動
「イグザクトストップ」ファンクションは NC パートプログラムのコマンド G60 ま
たは G09 で選択できます。選択する前または選択時,要求されたイグザクトス
トップ基準が適切なプログラムコードで指定されなければなりません。G60 は
モーダルであり,G09 はノンモーダルです。
G09 は連続パスモードを中断するときに使います。両方のイグザクトストップ
ファンクションは選択されたイグザクトストップ基準でのみ機能します。イグザ
クトストップファンクションは連続パスモードファンクションにより選択解除さ
れます。
イグザクトストップ基準
• イグザクトストップ(微)
この基準は軸の実際/セット点位置のずれが特定の範囲内にとどまっているか
を監視するために用いられます。許容範囲は MD 36010: STOP_ LIMIT_FINE
(イグザクトストップ(微))に定義されています。
• イグザクトストップ(粗)
機能性に関してはイグザクトストップ(微)と同様ですが,この機能のための
監視ウィンドウは MD 36000: STOP_LIMIT_COARSE (イグザクトストップ
(粗)
)に定められています。イグザクトストップ(微)より早くブロックチェ
ンジを行うためには,イグザクトストップ(粗)基準をイグザクトストップ
(微)基準より広く設定します。
イグザクトストップ
設定位置
軸方向プラス
軸方向マイナス
イグザクトストップ
実際位置
図 1.32 イグザクトストップ(粗/微)の表示
• 補間器エンド
この基準が適用されると,ブロックチェンジは補間器が軸のセット点速度を補
間サイクルについてゼロから計算したときに行われます。ブロックチェンジは
このように軸のダイナミック応答に依存しています。パス軸の実際位置はブ
ロックチェンジの際に監視されません。この基準では,追従誤差のため,輪郭
の丸めはノンタンジェンシャルブロック遷移 (non-tangential block transitions) に
おいて可能です。
補間器エンドにおいては,ブロック中の補助ファンクションが,動作の終了で
出力される場合は,連続パスモードまたはイグザクトストップファンクション
のアクティブなイグザクトストップ基準とは関係なく PLC に転送されます。
1-168
ブロックチェンジ
G603
G602
実際の点 G601
セット点
イグザクトストップ(粗)>
イグザクトストップ(微)
図 1.33 イグザクトストップ基準に依存するブロックチェンジ
イグザクトストップ基準の起動
イグザクトストップ基準はすべての NC パートプログラムブロックにおいて次の G
コードにより選択できます。
• G601 - イグザクトストップ(微)
• G602 - イグザクトストップ(粗)
• G603 - 補間器エンド
3 つのすべての基準は G ファンクションをプログラムすることでグローバルに起
動し,イグザクトストップファンクション G60 または G90 が選択されたときに評
価されます。アクティブな基準は他の基準を選択することで無効になります。
連続パスモードにおいてある特定の状態になると,イグザクトストップを必要と
することがあり,イグザクトストップが 3 つの基準のひとつに従って実行されま
す(1.3.2 の「■連続パスモード」を参照してください)。
■ 連続パスモード
連続パスモードでは,パス速度はブロックチェンジ時にイグザクトストップ基準
を満たすための減速を行いません。このモードの目的は,プログラムが次のブ
ロックに移動する際,軸速度が可能な限り一定となり,ブロックチェンジ点での
急激なパス速度減少がないようにすることです。この目的を果たすため,連続パ
スモードが選択されると「先読み」ファンクションも起動します(1.3.2 の「■ 先
読み」を参照)
。
連続パスモードは,プログラムされた輪郭の部分的変更による突然のブロック遷
移を平滑化しタンジェンシャル整形 (tangential shaping) を行います。プログラムさ
れた輪郭に関する変更の範囲は過負荷係数や平滑化基準を指定することで制限で
きます。
連続パスオペレーションは次のことを行います。
• 輪郭の丸め
• イグザクトストップ基準を満足するのに必要な停止や加速処理を省くことによ
る加工時間の短縮。
• 速度が一定に保てることによる切削条件の改善。
1-169
連続パスモードオペレーションは次の場合に適しています。
• 輪郭をより早くトラバースする必要がある場合(たとえば,急速トラバース)。
• 連続性を維持するためにプログラムされた輪郭より特定の偏差基準で正確な輪
郭がずれてもよい場合。
連続モードオペレーションは次の場合に適しています。
• 輪郭を精密にトラバースする場合。
• 厳密に一定速度が要求される場合。
暗示的イグザクトストップ
場合によっては連続パスモードで連続動作を実行させるためにイグザクトストッ
プが必要になることがあります。そのような場合,パス速度はゼロになります。
• 補助ファンクションがトラバース動作の前に出力される場合,前のブロックは
選択されたイグザクトストップ基準が満たされたときのみ終了します。
• 補助ファンクションがトラバースの動作の後に出力される場合,ブロックの補
間器エンドの後に出力されます。
• 実行可能なブロック(たとえば,位置決め軸を開始する)にパス軸のトラベル
情報がない場合,前のブロックは選択されたイグザクトストップ基準に到達す
ると終了します。
• 位置決め軸がジオメトリ軸として宣言される場合,前のブロックはジオメトリ
軸がプログラムされた時に補間器エンドで終了します。
• 前回位置決め軸またはスピンドル(特殊軸の初期設定が位置決め軸)としてプ
ログラムされた同期軸がプログラムされる場合,前のブロックは補間器エンド
で終了します。
• 変換が変更された場合,先に処理されたブロックはアクティブなイグザクトス
トップ基準で終了します。
• ブロックは,後続のブロックに加速プロファイル BRISK/SOFT (硬/軟)切換
えがある場合,補間器エンドで終了します。BRISK (硬)と SOFT (軟)につ
いては下記を参照してください。
参照: 1.4 加減速制御 (B2)
• 「バッファを空にする」ファンクションがパートプログラムにプログラムされ
ていると,前のブロックは選択されたイグザクトストップ基準に到達したとき
終了します(1.3.2 の「■同期のための停止」を参照)。
1-170
連続パスモードにおいて速度 = 0
次のような場合,暗示的イグザクトストップ応答に関わらず,パス動作はブロッ
クエンドでゼロ速度まで減速されます。
• 位置決め軸は構文 POS (1.3.2 の「■ 一般事項」を参照してください)でプロ
グラムされ,トラバース時間がパス軸のトラバース時間を超えている場合。ブ
ロックチェンジは位置決め軸のイグザクトストップ(微)に到達したとき実行
されます。
• 構文 SPOS でプログラムされたスピンドルの位置決めに必要な時間が,パス軸
のトラバース時間を超えている場合。ブロックチェンジは位置決めスピンドル
のイグザクトストップ(微)に到達したとき実行されます。
• 現在のブロックがジオメトリ軸のトラバースコマンドを,後続のブロックが同
期軸のトラバースコマンドを含む場合,または,現在のブロックが同期軸のト
ラバースコマンドを,後続のブロックがジオメトリ軸のトラバースコマンドを
含む場合。
• 非同期化処理が行われる必要がある場合(1.3.2 の「■ 同期のための停止」を
参照)。
トラバース中の補助ファンクション出力
トラバースや短いトラバースブロック中の補助ファンクションの出力を有する連
続パスモードでは,パス速度は PLC が補助ファンクションを確認応答する前でも
減少します。このように軸は加速制限を超えることなくブロックエンドで停止す
ることがあります。
ブロックエンドでは確認応答があれば動作が継続されます。速度減少の途中に確
認応答があった場合,速度は再びプログラムパス速度まで加速されます。連続パ
スモードにおけるこの応答を防ぐには,CNC の PLC が補助機能の確認応答を保証
している CNC のマシンデータ MD 10110: PLC_CYCLE_TIME_AVERAGE (最大確
認応答時間)内に時間を設定します。補助機能出力のあるプログラムパスの長さ
とブロックの速度のため,トラバース時間がマシンデータに定義されている時間
より短い場合,ブロックの期間が定義された時間と一致するようにブロックのパ
ス速度を前もって減速しておくことができます。確認応答が時間内にない場合,
次に用意されたブロックは処理されず,軸は加速制限に関わらずセット点 = 0 で停
止させられます。PLC の確認応答時間が理由で速度を減速させる必要がある長い
ブロックにおいても,確認応答がブロック終了までにない場合,現在の速度はブ
ロックエンドまでは維持され,ブロックエンドで前述のように減速します。減速
処理中に確認応答があっても,要求された速度への加速は実行されません。
1-171
■ 過負荷係数による速度減少
連続パスモードにおいて,ノンタンジェンシャルブロック遷移 (non-tangential block
transition) が,減速制限を守り過負荷係数を考慮しながらひとつの補間サイクルで
トラバースできるように,このファンクションはパス速度を減速させます。
速度の急落があると,ブロック遷移の際にノンタンジェンシャル輪郭で軸速度の
急変が起こります。これらの速度の急変は連動した動きの同期軸でも起こります。
速度の急変はパス速度がゼロになるのを防ぎます。この速度の急変が実行される
のは,軸速度が,軸加速によって,そこから新しいセット点にその速度の急変で
到達可能な速度まで減少したときです。セット点の急変の度合は過負荷係数で制
限できます。速度の急変の度合いは軸方向なので,ブロックチェンジの間はアク
ティブであるパス軸の最小限の速度の急変がブロック遷移中に考慮されます。実
質的なタンジェンシャルブロック遷移において,許容される軸加速を超えない場
合はパス速度は急落しません。このように,極めて小さな突然の輪郭の変化でも
直接オーバトラベルされることがあります。
過負荷係数
過負荷係数はブロックエンドにおけるマシン軸速度の急変を制限します。速度の
急変が軸の最大負荷を超えないので,速度の急変は軸加速から得られます。過負
荷係数は,MD 32300: MAX_AX_ACCEL (軸加速)に設定されているマシン軸の
加速レートを 1 IPO サイクルだけ超過してもよい超過量を定義したものです。速度
の急変は,軸加速 x(過負荷係数 - 1)x 補間サイクルの積です。この係数はマシン
データ MD 32210: MAX_ACCEL_OVL_FACTOR (軸方向の速度急変の過負荷係数)
に保存されます。
係数 1.0 は限られた速度でタンジェンシャル遷移のみトラバースできることを意味
しています。他の遷移では,セット点を変更することで速度はゼロにまで減速さ
れます。この挙動は「補間器エンドでのイグザクトストップ」のファンクション
と同じです。これは連続パスモードでは望ましくなく,従って係数は 1.0 より大き
く設定しなければなりません。
マシンが膝形ブロック遷移時に振動を受け,しかも丸めが使われない場合は,立
上がり時にこの係数を小さくしておくことが大切です。
速度減少の選択と選択解除
過負荷係数で速度を減少させる連続パスモードは,プログラムコード G64 によっ
てモーダルですべての NC パートプログラムブロックにおいて選択できます。
連続パスモード G64 は:
• イグザクトストップ G09 が選択されたときノンモーダルで中断します。
• イグザクトストップ G60 が選択されたとき,選択解除されます。
• 輪郭丸め G641 が選択されたとき,選択解除されます。
1-172
暗示的連続パスモード
• マルチブロックスレッド(いくつかのスレッドブロックの組)では,ブロック
スレッド間でのブロックチェンジは連続パスモード G64 で自動的に実行され
ます。
• 輪郭丸め G641 を有する連続パスモードで,ブロックのパス長が短すぎるため
(たとえば,ゼロサイクルブロック)丸めブロックが挿入できないとき,連続
パスモードへの切換えが自動的に行われます。
下図はファンクション速度がどのように過負荷係数により急落するかを示してい
ます。
Y 軸の速度
ブロックチェンジ
パス速度
ブロックチェンジ
X 軸の
速度
傾斜:a x
傾斜:f Overlx * a x
f Overlx > 1
軸速度の急変
IPO サイクル
Y 軸の
速度
傾斜:a y
傾斜:f Overly * a y
f Overly >f Overlx > 1
IPO サイクル
図 1.34 ブロック遷移時の軸速度変化
1-173
軸速度の急変
■ パス基準による丸め
丸めとは,プログラムされたフィードレートの局部的変更により,膝形ブロック
遷移がタンジェンシャルブロック遷移に変更することです。丸めはもとの膝形ブ
ロック遷移の付近のエリア(CNC により挿入されたブロック間の遷移を含む)を
連続的な輪郭に置換えます。この場合,考慮されるのはジオメトリ軸だけではな
く,同期的にトラバースするすべてのマシン軸です。丸めファンクションはオリ
エンテーション軸のトラバースパスとともに,同期軸の一般的な速度の急変を円
滑にします。
(注)丸めは次のような平滑化ファンクションの代用として使うこ
とはできず,またすべきでもありません:RND,RNDM,
ASPLINE,BSPLINE,CSPLINE
非連続的に隣接するブロックを短くし,この地点に 1 つまたは 2 つのブロックを
挿入することで丸めが実施されます。もとのブロック境界は削除され,同期化条
件(たとえば,動作に並行する補助ファンクション出力,ブロックエンドでの停
止)として利用できなくなります。丸めでは,すべての同期化条件は短くされた
最初のブロックエンドを基準にするのがよく,中間の丸めブロックエンドを基準
にすべきではありません。後続ブロックは開始されずブロックエンドで停止し,
後続ブロックの輪郭はまだ変更可能です。
丸めはブロック遷移が有限速度でトラバースされる場合にのみ実行されます。最
高パス速度は曲率の影響を受けます。軸の最高加速値は超過することはありませ
ん。パス軸のトラバース情報のないブロックは速度ゼロが要求されるので丸めは
行われません。
丸めはブロック遷移のトラバースが G64 (過負荷係数を参照)にしたがったブ
ロックエンドでの許容速度未満の速度を必要とする場合にも使われます。つまり
輪郭の極めて小さい(たとえば 0.5 度)膝部は直接オーバトラベルされることがあ
ります。
中間の丸めブロックがない
次のような場合,丸めブロックは挿入されません。
1
2
2 つのブロック間で動作が停まった場合。この原因は:
1
補助ファンクション出力が次のブロックの動作の前にプログラムされている。
2
後継ブロックにパス動作が含まれていない。
3
前に位置決め軸であった軸が次のブロックで初めてパス軸としてトラバースする。
4
前にパス軸であった軸が次のブロックで初めて位置決め軸としてトラバースする。
5
次のブロックはジオメトリ軸を動かし,次のブロックでは動かさない。
6
次のブロックはジオメトリ軸を動かし,前のブロックでは動かさない。
7
スレッド切削前:次のブロックは予備ファンクションとして G33 を使用するが,前
のブロックは使用しない。
8
変更が BRISK (硬)と SOFT (軟)の間で行われる。
9
変換に係わる軸がパス動作に完全に割当てられない(たとえば,振動,位置決め
軸)
。
丸めブロックがパートプログラムの処理を遅らせる場合。これは次の場合に発生す
る:
1-174
1
丸めブロックが極めて短いブロック間に挿入された時。すべてのブロックが少なく
とも 1 つの補間サイクルを要求しているため,挿入されたブロックが加工時間を倍
増させる。
2
ブロック遷移が速度の減少を伴わずに G64 (丸めを伴わない連続パスモード)で超
えられる。丸めが処理時間を増大させる
3
丸めがパラメータ化されていない場合。このことは次の場合に発生する:
1
G0 ブロックにおいて ADISPOS == 0 である(初期値)
。以下を参照。
2
0 でないブロックにおいて ADIS == 0 である(初期値)。以下を参照。
3
0 と G0 以外,また G0 以外と G0 間の遷移中は,DISPOS と ADIS のいずれかより小さ
い値が適用される。
同期軸
いくつかのパスを同期化する必要がある時(たとえば,軸,特殊軸)
,すべてのパ
スが必ずそれぞれの丸めエリアを持たなければなりません。これを厳密に考慮す
るのは実用的ではありません。特に重要なのは輪郭(ジオメトリ軸)であり,次
の処理が行われます。
表 1.3 同期軸を有する丸め動作
次のための最初のパス:
ジオメトリ軸
オリエンテーション軸
/同期軸
丸めパスの結果
平滑
平滑
定義されたパスは正確にトラバースさ
れる。
平滑
膝形カーブ
2 つの中間ブロック,ジオメトリ軸は
パスに正確に従い,すべてのオリエン
テーション軸/同期軸のパスは平滑化
される。
膝形カーブ
平滑
1 つの中間ブロック,ジオメトリ軸は
丸めを実行し,すべてのオリエンテー
ション軸/同期軸は平滑化される。
膝形カーブ
膝形カーブ
1 つの中間ブロック,ジオメトリ軸は
丸めを実行し,すべてのオリエンテー
ション軸/同期軸は平滑化される。
パス基準
丸め範囲の大きさは ADIS と ADISPOS パス基準により制御されます。これらはあ
らかじめ調和させておく必要があります。ADIS と ADISPOS は,ブロックエンド
より少なくてもどのくらい前の距離で丸めブロックが開始すればよいか,あるい
はブロックエンドよりどのくらい前の距離で丸めブロックが終了しなければなら
ないかを指定します。
1-175
プログラムされた中間点
パス基準
丸め輪郭
プログラムされた
プログラムされた
エントリブロック
終了ブロック
図 1.35 角度のあるブロック遷移の丸めの例
鋭角は丸めカーブを大きな曲率にするので,それに対応して速度が大きく減少し
ます。
パス基準のパラメータ化
• ADIS は長さの標準単位(たとえば mm)で定義され,制御装置により自動的
に内部インクリメント(単位)に変換され,直線軸と回転軸の両方でこの形式
が使われます。
• ADISPOS は ADIS と同じ方法でプログラムされていますが,特に急速トラ
バースモード (G00) における動作で使われなければなりません。
• ADIS と ADISPOS はパートプログラムで前もって設定されています。
たとえば,ADIS = 0.3 は丸め距離が 0.3 mm のパス基準を表します。ADISPOS
でも同様です。
パス基準の範囲
• ADIS と ADISPOS はグローバルです。
• ADIS または ADISPOS のいずれかが必ずプログラムされなければなりません。
初期値がゼロの場合,G641 は G64 のように動作します。
• 関係するブロックのひとつだけが急速トラバース G00 の場合,小さいほうの
丸め距離が適用されます。
• ADIS に極めて小さい値が使われた場合,全ての補間ブロックに,たとえ中間
の丸めブロックであっても,少なくともひとつの補間点があることが大切で
す。最高のパス速度は従って ADIS /補間サイクルに制限されます(1.3.2 の
「■ 速度」の「ゼロサイクルブロック速度」を参照)
。
• ADIS でも ADISPOS でも,丸めエリアはブロックの長さにより制限されます。
1-176
vb = 残りのパス
丸めなし
vb パス N4
ブロック N3 の開始
vb パス N3
vb パス N5
図 1.36 ADIS 制限のあるパス
プログラミング例
N1 G641Y50 F10 ADIS= 0.5
N2 X50
N3 X50.7
N4 Y50.7
N5 Y51.4
N6 Y51.0
N7 X52.1
短い距離(それぞれ < 4 * ADIS,< 4 * ADISPOS)では,丸め距離はもとのブロッ
クのトラバース可能な部分が保存されるように減少します。残りの長さは軸のパ
スに依存し,約 60 % の距離はブロック内でトラバースされます。ADIS または
ADISPOS はトラバースできる距離が残りの 40 % に減少します。このアルゴリズ
ムは輪郭の極めて小さい変化について丸めブロックが挿入されないようにします。
この場合,連続パスモード G64 への切換えは丸めブロックが再度挿入できるよう
になるまでは自動になります。
丸めブロックの選択と選択解除
プログラムコード G641 は,パス基準に従って丸めをモーダルで選択するために,
どのような NC パートプログラムブロックにでも挿入できます。選択前または選択
時,パス基準 ADIS/ADISPOS が指定されなければなりません。連続パスモード
G641 は:
• イグザクトストップ G09 が選択されていると,ノンモーダルに中断できます。
• イグザクトストップ G60 が選択されていると,選択解除できます。
• 速度急落 G64 が選択されていると,選択解除できます。
SW 4.3 以降における応答
G641 コマンドでの丸めに加えて,軸公差を有する丸めをモーダルに起動するた
め,SW 4.3 以降において G642 を使用できます。
1-177
この場合,丸めは限定された ADIS の範囲内では起こらず,MD 33100:
COMPRESS_POS_TOL で定義された軸公差を保証します。
他のすべての点において,ファンクションは G641 と同じです。下記も参照してく
ださい。
参照: YS840DI ユーザーズマニュアル・プログラミング編
■ 減速中のパスのジャーク制限
はじめに
パス上のジャーク制限は,連続パスモードに影響する 3 番目の方法です。
「過負荷
係数による減速」ファンクション(1.3.2「■ 過負荷係数による速度減少」を参照)
が速度変化率を制限するのに反して,ここに記述された「パス上のジャーク制限」
ファンクションは加速率の急変(ジャーク)を制限します。次に示す「パス関連
ジャーク制限」も参照してください。
参照: 1.4 加減速制御 (B2)
ジャークの発生
異なる曲率(たとえば,円-直線ライン遷移)のブロックからなる輪郭のセク
ションが加工されるとき,加速率の急変が連続パスモードで起こります。
ジャークの減少
そのようなジャークの厳しさは,異なる曲率のブロック間の遷移においてパス速
度を減らすことで減少できます。これによって滑らかな遷移が輪郭セクション間
で得られます。
ジャーク制限
ユーザは MD 32432: PATH_TRANS_JERK_LIM (ブロック制限でのジオ軸の最大軸
ジャーク)において,ブロック遷移中のジオメトリ軸で発生してもよい最大
ジャークを設定します。
起動
ブロック遷移でのジャーク制限は,連続パスモードが G64 または G641 と SOFT
(軟)加速特性でプログラムされれば,暗示的にアクティブになります。この場合,
MD 32432: PATH_TRANS_JERK_LIM が正の値に設定されていなければなりませ
ん。
例
ジャーク制限を起動するプログラムの例を 1.3.6「例」に示します。
1-178
■ マシン軸別ジャーク制限(SW 5 以降)
はじめに
パス動作のジャーク制限は以前はマシンデータ (MD 20600: MAX_PATH_JERK) で
定義されていました。このマシンデータはすべてのマシン軸の加速変更の最大値
を示しています。
新しいマシンデータ MD 32431: MAX_AX_JERK[..] では,マシンデータ MD 32300:
MAX_AX_ACCEL[..] での加速制限のように各マシン軸について独立して加速変更
を設定できます。
MD 32431: MAX_AX_JERK[..] は,パスにより補間され,SOFT(平滑加速カーブ)
がアクティブである軸に対して作用します。
メリット
軸別マシンデータを導入すると次のようなメリットがあります。
• 軸のダイナミック応答について補間許容値が直ちに得られ,各軸について完全
に利用できます。
• 各軸のジャーク制限が直線ブロックだけではなく,屈曲した輪郭にも実行され
ます。
ブロック中のマシンデータ
ブロック内の軸加速カーブと 2 つのブロック間の遷移時の軸加速カーブには基本
的な相違があります。
チャンネルの全ての軸のパス加速変更の全体的な制限は次のマシンデータで実施
されます。
• MD 20600: MAX_PATH_JERK
• MD 42510: SD_MAX_PATH_JERK
そのため,必要であれば,屈曲した輪郭のダイナミックパス応答より高いジャー
ク制限を設定することもできます。チャンネル別データのインパクトを抑止した
いのであれば,このマシンデータに極めて高い値を割当てる必要があります。
パス速度が屈曲した輪郭で変えられるとき,短期間の軸加速と軸ジャーク過負荷
を避けるために次のチャンネルマシンデータを使うことができます。
• MD 20602: CURV_EFFECT_ON_PATH_ACCEL:
パス加速を確保するためにパス速度を減少させます。これは BRISK(加速
カーブの急変化を有する時間最適化動作)と SOFT(ジャークフリー加速カー
ブ)に有効です。
• MD 20603: CURV_EFFECT_ON_PATH_JERK:
パスジャークを確保するためにパス速度を減少させます(SOFT のみに有効)。
速度と加速時間のいずれに注目するかでこれらのマシンデータの設定を使ってく
ださい。
この設定は直線マシン軸動作(直線ブロックで,キネマティックス変換がアク
ティブでない場合)の加工には影響を与えません。わずかに屈曲した輪郭に最小
限の影響を与えるだけです。
1-179
これらのマシンデータの初期設定は加工に影響がでないように選択されます。こ
のため古いマシンデータを修正せずに使うことができます。タイミングには変更
がありません。
JOG と POS の動作(非同期軸動作)では,MD 32420:
JOG_AND_POS_JERK_ENABLE がイネーブルであるときは必ず MD 32430:
JOG_AND_POS_MAX_JERK による前のジャーク制限が引続き適用されます。
ブロック遷移でのマシンデータ
ブロック遷移でのマシンデータは連続パスモード (G64, G641) がアクティブである
ときにのみ有効です。下記のマシンデータがブロック遷移での応答を決定します。
• MD 32210: MAX_ACCEL_OVL_FACTOR[..]
• MD 32432: PATH_TRANS_JERK_LIM[..]
MD 32210: MAX_ACCEL_OVL_FACTOR[..] はブロック遷移でのコーナで起こる
各軸の加速のオーバシュートを制限します。
マシンデータの値が 1 より大きいとき,コーナで軸速度が急変します。それによ
る軸加速のピークは以下によりオフセットされます。
• 補間サイクルによりオフセットされる。位置コントローラが補間サイクルレー
ト(サイクルが長ければ,平滑化効果がより大きくなる)で新しいセット点し
か受けつけないため。
• 位置コントローラの前の軸のセット点フィルターによりオフセットされる
(MD 32410: AX_JERK_TIME)。
• 位置およびドライブコントローラ,そして適用可能ならばアクティブでない
フィードフォワード制御 (FFWOF) のダイナミック応答によりオフセットされ
る。
1-180
MD 32432: PATH_TRANS_JERK_LIM[..] は,タンジェンシャルブロック遷移での
曲率の急変の結果起こるジャークオーバシュートを制限します。軸ジャークは軸
加速と同じ効果によりオフセットされます。
屈曲
; 直線
;弧
; タンジェンシャルな弧
; 15 度の曲げを持つ直線
図 1.37 例:直線と弧からなる輪郭
軸速度
軸加速
図 1.38 輪郭例の速度と加速(X 軸)
1-181
短期加速とジャークオーバシュートは条件によっては重大ではありません。
そのような場合,ブロック遷移での応答はブロック中の応答と別に設定すること
ができます。
その他の場合では,MD 32210: MAX_ACCEL_OVL_FACTOR[..] を 1 に,MD 32432:
PATH_TRANS_JERK_LIM[..] を MD 32431: MAX_AX_JERK[..] と等しく設定しなけ
ればなりません。
(注)MD 32432: PATH_TRANS_JERK_LIM[..] は以前はジオメトリ軸
にのみ使われていました。SW 5 以降では,データはパス上で
同期的にトラバースする全ての軸に使われています。マシン
データを以前に回転軸に設定しているなら,プログラムの実
行はかなり遅くなります。適切な値を高く設定することで,
元来の性能を発揮させることができます。
膝形加速特性と SOFT を組み合わせることはできません。し
かし,マシンデータ MD 35240: ACCEL_TYPE_DRIVE[..] は参
照され,加速制限が適用されます。
起動
パス動作は第 1 G グループの G コードで定義されます(たとえば,G1)。
マシンデータ MD 32431: MAX_AX_JERK[..] と MD 20603:
CURV_EFFECT_ON_PATH_JERK は SOFT がアクティブのパス動作でのみ有効で
す。
MD 20602: CURV_EFFECT_ON_PATH_ACCEL は SOFT と BRISK の両方のパス動作
で有効です。
個々の軸のジャーク制限はマシンデータにより設定されます。値は対応するアク
セス権をもつパートプログラムからも設定できます。この変更は RESET(リセッ
ト)によってキャンセルできないので注意してください。
例
N100 G0 x0 y0 z20 BRISK
N200 G0 x100 SOFT G641 ADIS=.1 ADISPOS=3 ; 位置決め
N300 z0
; インフィード
N400 G1 F200 z-10
; ボーリング加工
N500 G0 z20
; 後退
N600 x0
; 再位置決め
N700 M17
1-182
■ 先読み
先読みは連続パスモード (G64,G641) 中のプロシージャの一つで,現在のブロッ
クを超えていくつもの NC パートプログラムブロックに渡って先読みで速度制御を
行います。プログラムブロックが極めて小さなパスからなる場合,ブロックごと
の速度は加速制限を越えないようブロック終点で軸の減速を行います。これは,
実質的に接線方向パス遷移を持つ十分な数のブロックが利用可能であっても,プ
ログラムされた速度に実際は到達しないことを意味します。先読みファンクショ
ンで,短い距離で高いフィードレートを得るために,ほぼ接線方向パス遷移を有
する加速および減速カーブを作成することができます。先読みでは加速および速
度制限の違反がないように,速度制限をかけることが可能です。
プログラムされた速度
G64: 先読み速度制御
G60: 一定速度は得られない
ブロックパス
図 1.39 短いトラバースパスのイグザクトストップ G60 と連続パスモード G64 での
先読みの速度応答の比較
先読みは次のような速度制限を行います。
• ブロックエンドでのイグザクトストップ
• ブロック中での速度制限
• ブロック中での加速制限
• ブロック遷移時の速度制限
• ブロック遷移でのブロックチェンジを有する同期化
1-183
適用範囲
「先読み」はパス軸でのみ有効で,スピンドルや位置決め軸では無効です。先読み
は速度制限のブロックに関連する分析をし,それをもとに要求された制動動作を
求めます。先読みファンクションはブロックの長さ,制動能力,許容パス速度に
合わせて自動的に最適化されます。
安全上の理由で,最後のブロックエンドでの速度は,次のブロックが極めて小さ
いか,またはイグザクトストップブロックであると,軸がブロックエンドまでに
停止しなければならないため,最初にゼロにしておかなければなりません。速度
設定が高くパスの短い一連のブロックでは,求められた設定速度を得るために,
速度が現行の先読みファンクションで求められた速度値によって各ブロックで増
加します。この後先読みファンクションで考慮される最後のブロックエンドでの
速度がゼロになるように減少します。これにより,のこぎり状の速度プロファイ
ル(図 1.40 を参照)が現れます。これは,設定速度を減少させるか,または先読
みファンクションで考慮されるブロック番号数を増やすことによって避けること
ができます。
ブロック数
連続パスモードで確実に軸トラバースを行うには,フィードレートがいくつもの
ブロックに渡って適用されていなければなりません。先読みファンクションで考
慮されるブロック数は自動的に求められますが,マシンデータにより任意に制限
することもできます。標準設定は 1 であり,それは先読みが次のブロックのみを
速度制御するという意味です。
先読みは短いブロックでは特に重要であるため(減速パスに関連して),必要とな
るブロック数は先読み減速(図 1.40 を参照)で大切です。最高速度から制動をか
けて停止させるパスの長さが減速パスと同じと見なすことができます。軸加速 a =
1 m/s2 が小さく,フィードレート v パス = 10 m/min が高いマシンでは,制御装置の
ブロックサイクル時間を TB = 10 ms とすると,ブロック数は次のようにして求め
られます。
n
先読み = 減速パス/ブロック長 = ( v パス 2 /(2a)) / ( v パス * TB) = 9
これらの状況から,フィードレートは 10 ブロック以上に適用するほうがいいで
しょう。先読みファンクションのために決められたブロック数は,先読みアルゴ
リズムとメモリ要件には関係ありません。
加工速度がしばしばプログラム中の最高速度を下回るため,必要以上のブロック
数が考慮され,不必要にコンピュータのパワーを消費します。このため,必要と
なるブロック数は,プログラムされた速度に,MD 12100: OVR_FACTOR_LIMIT_BIN
の値(2 進コード化されたオーバライドスイッチでの制限)
,または MD 12030:
OVR_FACTOR_FEEDRATE の 31 番目のオーバライド値(パスフィードレートオー
バライドスイッチの重み)を掛けることによって計算した速度より求められます。
31 番目のオーバライド値は最高のオーバライド係数の値でなければなりません。
先読みファンクションで考慮されるブロック数は IPO バッファの最大 NC ブロッ
ク数により制限されます。
1-184
図 1.40 いくつものブロックに渡る速度制御例。先読みのブロック数 = 2
速度プロファイル
定められた速度制限に加えて,先読みはプログラムされた速度を考慮することが
できます。このため,先読みを現在のブロックを超えて適用することにより,速
度を低くすることができます。
次のブロックの速度
ひとつの実行可能な速度プロファイルには次のブロックでの速度計算が含まれま
す。現在の NC ブロックと次の NC ブロックからの情報を使って速度プロファイル
が計算されます。そしてこの速度プロファイルから,現在のオーバライド用の速
度制限が計算されます。求められた速度プロファイルの最高値は最高パス速度に
よって制限されます。このファンクションを使えば,次のブロックで低い速度が
得られるようにオーバライドを考慮することによって,現在のブロックで速度を
下げることができます。速度の減少に現在のブロックのトラバース時間より時間
がかかる場合,速度は次のブロックでさらに減少されます。速度制御は次のブ
ロックでのみ考慮されます。この機能は MD 20400:
LOOKAH_USE_VELO_NEXT_BLOCK (次のブロック速度のための先読み)で起
動します。
1-185
オーバライド点
次のブロックの速度プロファイルが十分でない場合,たとえばオーバライド値が
200 % と非常に高かったり,または一定切削レート G96 が使われているために次
のブロックで速度を更に減少しなければならない場合は,先読みはいくつもの NC
ブロックに渡って,プログラムされた速度を減少させる方法を提供します。オー
バライド点を定めることで,先読みはそれぞれの値の速度プロファイルの制限を
計算します。現行のオーバライドに要求された速度減少はこれらのプロファイル
から得られます。求められた速度プロファイルの最高値は最高パス速度によって
制限されます。
上位の点は MD 12030: OVR_FACTOR_FEEDRATE(パスフィードオーバライドスイッチの
重み)の最大値設定,または MD 12100: OVR_FACTOR_LIMIT_BIN(2 進コード化され
たオーバライドスイッチでの制限)の値設定により到達する速度範囲をカバーし
ているべきです。このようにしてプログラムされたブロックにまで速度の減少が
続くことを避けることができます。すでにオーバライド 100 % でブロック境界に
またがった速度減少が要求されている場合,下位のオーバライド範囲中に点を設
定しなければなりません。チャンネルごとに使われるオーバライド点の数は MD
20430: LOOKAH_NUM_OVR_POINTS (先読みのオーバライドスイッチ点の数)で指定さ
れています。関連する点は MD 20440: LOOKAH_OVR_POINTS (先読みのオーバライ
ドスイッチ点)に保存されています。
このファンクションのデフォルトマシンデータでも,オーバライドに依存する速
度制約の範囲の大部分がカバーされているので,速度プロファイルを計算しなく
ても使用可能です。
速度制約はオーバライドに依存する速度制約より優先されます。
これらの手順のどちらも使用しない場合,設定の速度は現在のブロックでのみ達
成されます。
1-186
オーバライド 50 %,100 %,150 % での速度変化
プログラムされた
接合点
速度
プロファイル
150 % と 50 %
図 1.41 先読みブロック選択 = 4 および次の設定での制約された速度変化の例
MD 20430: LOOKAH_NUM_OVR_POINTS = 2
MD 20440: LOOKAH_OVR_POINTS = 1.5, 0.5
MD 20400: LOOKAH_USE_VELO_NEXT_BLOCK = 1
ブロックサイクル問題
ブロックサイクル問題は,処理される NC ブロックのトラバース距離が短いため,
先読みファンクションがブロック準備に十分な時間を与えるためにマシン速度を
減少しなければならない場合に起こります。
この場合,パス動作は連続的に加速と減速を行います。
MD 20450: LOOKAH_RELIEVE_BLOCK_CYCLE (ブロックサイクル時間の逃げ係
数)で速度変動を円滑にするように設定できます。
先読みの選択と選択解除
先読みファンクションは連続パスモード(それぞれ G64 と G641)で選択と選択解
除ができます。
1-187
1.3.3 補足条件
補足条件はありません。
1.3.4 データの説明 (MD,SD)
■ 一般マシンデータ
10110
PLC_CYCLE_TIME_AVERAGE
MD 番号
最大 PLC 確認応答時間
初期設定:0.1
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
保護レベル:2
単位:s
電源オン
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
補助ファンクションの確認応答が保証されている 0B1 サイクル時間について
の CNC の時間情報。補助ファンクション出力を有する連続パスモードでは,
最小トラバース時間が指定された時間に対応するように,MD で設定された時
間が動作中のパスフィードを制御するのに使われる。これにより,PLC の確
認応答を待つことなく円滑な速度変化が可能となる。内部時間は IPO サイク
ルに基づく。
1-188
■ チャンネル別マシンデータ
20400
LOOKAH_USE_VELO_NEXT_BLOCK
MD 番号
プログラムされた次のブロック速度の先読み
初期設定:0
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
電源オン
保護レベル:2
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:1.1
意味:
先読みはプログラムされた次のブロック速度についてアクティブである。速
度プロファイルは要求された現行のオーバライドの速度減少となるように自
動的に発生する。
20430
LOOKAH_NUM_OVR_POINTS
MD 番号
先読みのオーバライドスイッチ点の数
初期設定:1, 1, 1, 1, 1, ...
最小入力リミット:0
最大入力リミット:2
変更が有効になるための条件 :
電源オン
保護レベル:2/7
単位:-
データタイプ:DWORD
適用開始 SW バージョン:1.1
意味:
このデータは,先読みによって考慮されるチャンネルごとのオーバライドに
依存する速度制約について,計算されたオーバライド点数を定義する。
LOOKAH_NUM_OVR_POINTS = 0: MD 20440: LOOAH_OVR_POINTS (先読
みのオーバライドスイッチ点)に保存されているオーバライド点に基づいた
速度プロファイルはない。
LOOKAH_NUM_OVR_POINTS = 1: MD: LOOHAH_OVR_POINTS (先読みの
オーバライドスイッチ点)にあるオーバライド点に基いて速度プロファイル
が計算される。
OOKAH_NUM_OVR_POINTS = 2: MD: LOOHAH_OVR_POINTS (先読みの
オーバライドスイッチ点)にある 2 つのオーバライド点に基いて速度プロ
ファイルが計算される。
関連性
MD 20440: LOOKAH _OVR_POINTS(先読みのオーバライドスイッチ点)
20440
LOOKAH_OVR_POINTS
MD 番号
先読みのオーバライドスイッチ点
初期設定:{1.0, 0.2},{1.0, 0.2}, ...
{1.0, 0.2}
最小入力リミット:0.2
最大入力リミット:2.0
変更が有効になるための条件 :
保護レベル:2/7
単位:-
電源オン
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
先読みによって考慮されるチャンネルごとのオーバライドに依存する速度制
約についてのオーバライド点の定義。
先読みは MD: LOOKAH_NUM_OVR_POINTS (先読みのオーバライドスイッ
チ点数)によりイネーブルになる各オーバライド点の速度プロファイルの制
限を計算する。現行のオーバライドに要求されている速度減少はこれらのプ
ロファイルを使って得られる。
点は 2.0,1.0(2.0 は 200 %,1.0 は 100 % に対応)のように降順で各チャンネ
ルに入力しなければならない。上位のオーバライド点は
MD: OVR_FACTOR_FEEDRATE (パスフィードレートオーバライドスイッチ
の重み)または MD: OVR_FACTOR_LIMIT_BIN (2 進コード化されたオーバ
ライドスイッチでの制限)の上位の値に近くなるものであること。
オーバライド点はマシンと制御に有効なオーバライド範囲に適合するもので
あること。
1-189
20440
LOOKAH_OVR_POINTS
MD 番号
先読みのオーバライドスイッチ点
関連性
MD 20430: LOOKAH_NUM_OVR_POINTS (先読みのオーバライドスイッチ点
数)
20450
LOOKAH_RELIEVE_BLOCK_CYCLE
MD 番号
ブロックサイクル時間の逃げ係数
初期設定:0.0
最小入力リミット:***
最大入力リミット:+
変更が有効になるための条件 :
電源オン
保護レベル:2
単位:-
データタイプ:DOUBLE
適用開始 SW バージョン:2
意味:
ブロックサイクル問題は次の理由で起こる。
処理される NC ブロックのトラバース時間が短いため,先読みファンクショ
ンがブロックの準備に十分な時間を与えるためにマシン速度を減少しなけれ
ばならない。この場合,パス動作の一定の減速と加速が起こる。
このマシンデータで,どの程度速度変動が円滑化されるかを定義できる。
例外,エラー
約 1.0 までの値は有効である。0.0 はファンクションがアクティブでないこと
を意味する。
■ 軸別マシンデータ
32310
MAX_ACCEL_OVL_FACTOR
MD 番号
軸速度急変の過負荷係数
初期設定:1.2
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
NEW_CONF
保護レベル:3/3
単位:-
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
過負荷係数はブロック遷移でのマシン軸の速度の急変を制限する。入力され
た値は MD: MAX_ AX_ ACCEL (軸加速)の値を参照し,ひとつの IPO サイ
クルの最高加速がどの程度超過されるかを示す。
関連性
MD 32300: MAX_AX_ACCEL (軸加速)
MD 10070: IPO_SYSCLOCK_TIME_RATIO (補間器クロック)
32432
PATH_TRANS_JERK_LIM
MD 番号
ブロック境界でのジオメトリ軸の最大軸方向ジャーク
初期設定:1 000000.0
最小入力リミット:>0.0
最大入力リミット:+
変更が有効になるための条件 :
NEW_CONF
保護レベル:3/3
単位:mm/s3,度 /s3
データタイプ:DOUBLE
適用開始 SW バージョン:3.2
意味:
制御装置は設定値と異なる曲率の輪郭部分間のブロック遷移でジャーク(加
速急変)を制限する。
この MD は次の場合は無意味
イグザクトストップ
アプリケーション例
1.3.6「例」を参照
関連性
連続パスモード,加速タイプは SOFT
1-190
36000
STOP_LIMIT_COARSE
MD 番号
イグザクトストップ(粗)
初期設定:0.04
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
NEW_CONF
保護レベル:2
単位:mm, 度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
NC ブロックは,セットポイントからのパス軸の実際位置の距離がイグザクト
ストップリミットについて入力された時完了したパス軸の実際位置がこれら
の制限内でない場合,NC ブロックは完了されたとみなされず,パートプログ
ラム処理は中断する。次のブロックへの遷移は入力された値に影響される。
値が大きければ,ブロックチェンジは早く始められる。決められたイグザク
トストップリミットに到達しない場合:
- ブロックは完了したとみなされない
- 軸のトラバースの継続は不可能になる
- MD: POSITIONING_TIME (イグザクトストップ(微)監視時間)の時間が
経過した後,アラーム 25080 "positioning monitoring" (位置決め監視)が出
力される
- 位置決め画面中に軸の動作方向 +/- が表示される
イグザクトストップウィンドウは位置制御モードのスピンドルについても評
価される(SPCON 命令)
。
例外,エラー
MD: STOP_LIMIT_COARSE は MD: STOP_LIMIT_FINE (イグザクトストップ
(微))より小さくてはならない。イグザクトストップと同じブロックチェン
ジ動作をさせるために,イグザクトストップ(粗)ウィンドウはイグザクト
ストップ(微)のウィンドウと同じにしてもよい。
MD: STOP_LIMIT_COARSE は MD: STANDSTIL_POS_TOL (ゼロ速度公差)
以上であってはならない。
関連性
MD 36020: POSITIONING_TIME (イグザクトストップ(微)遅延時間)
36010
STOP_LIMIT_FINE
MD 番号
イグザクトストップ(微)
初期設定:0.01
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
NEW_CONF
保護レベル:2
単位:mm,度
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
MD: STOP_LIMIT_COARSE (イグザクトストップ(粗)
)を参照
例外,エラー
関連性
MD: STOP_LIMT_FINE は MD: STOP_LIMIT_COARSE (イグザクトストップ
(粗))の設定より大きくてはならない。
MD: STOP_LIMIT_FINE は MD: STAND-STILL_ POS_TOL (ゼロ速度公差)と
同じまたは大きくてはならない。
MD 36020: POSITIONING_TIME (イグザクトストップ(微)遅延時間)
1-191
36020
POSITIONING_TIME
MD 番号
イグザクトストップ(微)遅延時間
初期設定:5.0
最小入力リミット:0
最大入力リミット:+
変更が有効になるための条件 :
NEW_CONF
保護レベル:2
単位:s
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
ブロックがイグザクトストップで終了した場合,軸は位置決め時間内にイグ
ザクトストップウィンドウ(微/粗)に到達していなければならない。さも
なければ,位置決め動作はアラーム 25080 "Positioning monitoring" (位置決め
監視)により強制終了し,フォローアップモードに切替わる。監視時間は軸
の補間器エンドで開始される。
位置制御されたスピンドルはこの位置決め監視に従う。エラーが起きた場合,
アラーム 25080 "Positioning monitoring" (位置決め監視)が再び出力される。
IS "Mode group ready"(モードグループレディ)(DB11, DBX6.3) がアラーム
25080 でリセットされ,アラームを引き起こしたパス軸は MD:
AX_EMERGENCY_STOP_TIME (エラーステータス時の制動ランプ時間)で
設定された制動ランプに従って停止し,フォローアップモードに切替わる。
モードグループの別のパス軸は補間器 (IPO) からセットポイント = 0 でリセッ
トされる。モードグループに属するトラバース位置決め軸は MD:
MAX_AX_ACCEL (軸加速)で設定された加速ランプに従って減速する。
関連性
MD 36000: STOP_LIMIT_COARSE (イグザクトストップ(粗))
MD 36010: STOP_LIMIT_FINE (イグザクトストップ(微))
)
32431
MAX_AX_JERK
MD 番号
パス動作の最大軸方向ジャーク
初期設定:1000000.0
最小入力リミット:0
最大入力リミット:-
変更が有効になるための条件 :
NEW_CONF
保護レベル:USER
単位:JERK
データタイプ:DOUBLE
適用開始 SW バージョン:5
意味:
パス動作のジャーク制限
1-192
20602
CURV_EFFECT_ON_PATH_ACCEL
MD 番号
ダイナミックパス応答に及ぼすパス曲率の影響
初期設定:0
最小入力リミット:0
最大入力リミット:.95
変更が有効になるための条件 :
NEW_CONF
保護レベル:USER
単位:-
データタイプ:DOUBLE
適用開始 SW バージョン:5
意味:
この変数はパス加速とパス速度に対してパス曲率が影響を与えることを可能
にする。
0: 禁止
> 0: 必要であれば,マシン軸の求心加速を十分に確保するため,パス速
度とパス加速は減少する。
0.75: 推奨される設定
CURV_EFFECT_ON_PATH_ACCEL は求心加速で使われる軸加速
(MAX_AX_ACCEL[..] を参照)の比率を指定する。残りはパス速度を修正す
るのに使われる。
例外,エラー
直線ブロックには求心加速は要求されず,パス加速に完全な軸加速が使用で
きる。CURV_EFFECT_ON_PATH_ACCEL はわずかに屈曲した輪郭に対して,
またはパスフィードが十分に小さければ,ほとんどまたは全く影響がない。
結果として,パス加速は (1 - CURV_EFFECT_ON_PATH_ACCEL) *
MAX_AX_ACCEL[..] で定義している値より高くなる。
関連性
MD 32431: MAX_AX_ACCEL[..]
20603
MD 番号
MD 番号
CURV_EFFECT_ON_PATH_JERK
初期設定:0
最小入力リミット:0
最大入力リミット:.95
変更が有効になるための条件 :
NEW_CONF
保護レベル:USER
単位:-
データタイプ:DOUBLE
適用開始 SW バージョン:5
意味:
この変数はパス加速とパスジャークに対してパス曲率が影響を与えることを
可能にする。
CURV_EFFECT_ON_PATH_JERK の値は CURV_EFFECT_ON_PATH_ACCEL >
0 でジャーク制限速度制御(SOFT,$MC_GCODE_RESET_VALUES[ 20 ] = 2)
がアクティブであるときのみ意味がある。
0: 禁止
> 0: 必要であれば,マシン軸について屈曲した輪郭のパス速度の変更を
確保するため,パス加速とパスジャークは減少する。
0.5: 推奨される設定
このマシンデータは屈曲した輪郭での減速または加速のためにパス加速を適
用するのに使われる軸ジャーク(MAX_AX_JERK[..] も参照)の比率を指定す
る。(1 - CURV_EFFECT_ON_PATH_JERK) の残りは,速度のみを到達させるの
に要求されたジャーク比率と同様にパス加速における変更が可能である。
ジャーク比率は CURV_EFFECT_ON_PATH_ACCEL での変更を通じて動作が
可能になる。マシンデータの値が増加された場合,高いパス速度(最適なも
のを決めること)での高い率の曲率の変化で点を通過することができる。
例外,エラー
CURV_EFFECT_ON_PATH_JERK は合計軸ジャークがパス加速の変更に使われ
るため,直線ブロックには関連しない。
$MC_CURV_EFFECT_ON_PATH_JERK は,わずかに屈曲した輪郭には,ある
いは最大パスフィードが十分に小さくパス速度の変更が小さい場合には,大
きな影響を与えない。結果として減速ランプは短くなる。
関連性
MD 32431: MAX_AX_JERK[..]
1-193
1.3.5 信号の説明
■ チャンネル別信号
DB21, ...
DBX36.3
すべての静止軸
データブロック
チャンネルからの信号 (NCK → PLC)
エッジ評価:なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
チャンネルに割当てられたすべての軸は補間器エンドで静止している。他のト
ラバース動作はアクティブでない。
信号が有効となる最初の SW バージョン: 1.1
■ 軸別信号
DB31, ...
DBX60.6
イグザクトストップ(粗)で到達した位置
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
軸は適切なイグザクトストップ状態であり,軸の補間器はどれもアクティブで
はなく:
- 制御装置はリセットモード(リセットキーまたはプログラムエンド)であ
り,
- 軸は前に位置決め軸または位置決めスピンドル(特殊軸の初期設定:位置決
め軸)としてプログラムされており,
- パス動作は NC ストップで停止し,
- スピンドルは位置制御モード(SPCON/SPOS 命令)で静止しており,
- 軸は " 位置測定系 " により速度制御から位置制御モードへ切替えられる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
軸が適切なイグザクトストップでないか,または補間器がその軸についてアク
ティブである,または:
- パス動作が NC ストップで停止した。
- 軸が速度制御モード(SPCOF/SPOSA 命令)にあり,
- 「フォローアップ」モードが軸についてアクティブである。
信号が有効となる最初の SW バージョン: 1.1
- 「パーキング」モードが軸についてアクティブである。
- 軸が " 位置測定系 " により位置制御から速度制御モードに切替えられる。
この信号は次の場合は無意味
丸め軸としてプログラムされた回転軸
関連性 ....
MD 36000: STOP_LIMIT_COARSE (イグザクトストップ(粗))
DB31, ...
DBX60.7
イグザクトストップ(微)で到達した位置
データブロック
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
" イグザクトストップ(粗)で到達した位置 " を参照。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
" イグザクトストップ(粗)で到達した位置 " (DB31, ... DBX60.6) を参照。
この信号は次の場合は無意味
丸め軸としてプログラムされた回転軸
関連性
MD 36010: STOP_LIMIT_FINE (イグザクトストップ(微))
1-194
信号が有効となる最初の SW バージョン: 1.1
1.3.6 例
パス上でのジャーク制限の例
N1000 G64 SOFT
; 加速応答が SOFT (軟)の連続パスモード
N1004 G0 X-20 Y10
;
N1005 G1 X-20 Y0
; 直線
N1010 G3 X-10 Y-10 I10
; パス曲率の急変を有するブロック遷移(直線-円)
N1011 G3 X0 Y0 J10
; 連続パス屈曲を有するブロック遷移
1020 G2 X5 Y5 I5
; パス曲率の急変を有するブロック遷移(円-円)
N1021 G2 X10 Y0 J-5
;
1.3.7 データフィールド,リスト
■ インタフェース信号
B 番号
ビット,バイト
名称
チャンネル別
21, ...
36.3
全ての静止軸
軸/スピンドル別
31, ...
60.6
イグザクトストップ(粗)で到達した位置
31, ...
60.7
イグザクトストップ(微)で到達した位置
1-195
参照
■ マシンデータ
番号
識別子
名称
参照
一般事項 ($MN_ ... )
10110
PLC_CYCLE_TIME_AVERA 最高 PLC 確認応答時間
GE
チャンネル別 ($MC_ ... )
20400
LOOKAH_USE_VELO_NEX 一定加速速度制御の先読み
T_BLOCK
20430
LOOKAH_NUM_OVR_POIN 先読みのオーバライドスイッチ点数
TS
20440
LOOKAH_OVR_POINTS
20450
LOOKAH_RELIEVE_BLOC ブロックサイクル時間の逃げ係数
K_CYCLE
先読みのオーバライドスイッチ点
軸/チャンネル別 ($MA_ ... )
32310
MAX_ACCEL_OVL_FACTO 速度急変の過負荷係数
R
32432
PATH_TRANS_JERK_LIM
ブロック境界でのジオメトリ軸の最大軸ジャーク
33100
COMPRESS_POS_TOL
補償を有する最大変動
36000
STOP_LIMIT_COARSE
イグザクトストップ(粗)
36010
STOP_LIMIT_FINE
イグザクトストップ(微)
36020
POSITIONING_TIME
イグザクトストップ(微)遅延時間
32431
MAX_AX_JERK
パス動作の最大軸ジャーク
20602
CURV_EFFECT_ON_PATH_ ダイナミックパス応答に及ぼすパス曲率の影響
ACCEL
20603
CURV_EFFECT_ON_PATH_J パスジャークに及ぼすパス曲率の影響
ERK
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
1-196
1.10(K1)
1.4 加減速制御 (B2)
1.4.1 概略説明
NC 軸は前もって設定された加速度で加速および減速されます。
加速度は,CNC の加速指令パターンに依存するとともに,モータのトルク,コン
トローラの容量,そしてマシン整備士の能力にも依存します。CNC は,パス速度
と曲率を考慮しつつ,マシンデータに保存されている各マシン軸の加速度どおり
動作しているかどうかをチェックします。必要に応じて,速度は軸別最高加速を
維持するために下げられます。
本文書では,現行の加速モードと加速制限(1.4.3「補足条件」を参照)によって
提供される特性と可能性を説明します。
1-197
1.4.2 詳細説明
■ 加速プロファイル
急激な加速変化
通常適用される軸速度の直線加減速制御においては,動作開始とともに加速度が
一気に立上がるように制御されます。このタイプの速度制御の目的は,プログラ
ムされた速度をブロックでカバーされた最大の領域に渡って維持することです。
このため,プログラムされたフィードレートの加速はブロックの始まりで最大値
で実行され,減速停止はブロックエンドで同様に最大値で実行されます。非連続
的なステップ状の加速では,ジャークなしでは軸の始動と制動はできず,時間を
最適化した速度/時間プロファイルが用いられます。
ジャーク制限加速
加速度の急激な変化を起こす方法とは対照的に,ジャーク制限加速プロファイル
は軸の加速度の変化が円滑(ジャークなし)になるよう動作を制御します。これ
は加速度変化の制限により行われます。ソフトな加速度変化のため,ステップ状
の加速よりトラバース時間は同じ距離,速度,加速度でも長くなります。この時
間のロスは軸に高い加速を設定することでカバーできます。
マシンの加速能力を最大限に利用できることの他にも,ジャーク制限を有する加
速には次のような利点があります。
• マシンの機械部分の磨耗が減少する
• マシン振動の制御が困難な高周波励起が減少する
1-198
ステップ状の加速
ジャーク制限を有する加速
図 1.42 ステップ状加速とジャーク制限を有する加速を示す速度および
加速プロファイルの概略図
a:
加速
v:
速度
t:
時間
1-199
■ パス関連ジャーク制限
パス補間の個別要求に応じて,ステップ状加速プロファイルかジャーク制限を有
する加速プロファイルかのいずれかを選ぶことができます。ジャーク制限は補間
器で制御されます。
ジャーク制限加速
ジャーク制限を有する加速は補間軸について適用できます。
パス関連最大許容ジャークはチャンネル別 MD 20600: MAX_PATH_JERK(パス関
連最大ジャーク)に保存されています。それによりパス加速の変化を制限します。
許容ジャーク値とパス加速を使って,加速度の変化が完了しなければならない時
間が計算されます。
加速の可能な変化はゼロとパス加速の間の値になります。加速制限は最大可能パ
ス加速です。
パス加速は補間軸の数とパスの形状に依存するため,ジャーク制限から求められ
た時間は決まった長さにはなりません。ジャーク制限が一定の場合は,持続時間
はパス加速に比例します。
a:加速
v:速度
t::時間
制動プロファイル
NCU 573
制動プロファイル
NCU 571/572
図 1.43 ジャーク制限を有する加速が用いられたときの速度と加速度の変化の表示
1-200
図 1.43 からも分かるように,加速度プロファイルは台形です。台形の高さはパス
加速によって制限されます。台形の側辺の傾きは加速度をパス関連最大ジャーク
で割ることで求められる時間に依存します。NCU 571 または 572 が使われたとき,
制動プロファイルはベル形をしています。NCU 573 では加速プロファイルは台形
になります。高さはパス加速で制限されます。MD 20600: MAX_PATH_JERK(パ
ス関連最大ジャーク)で設定されたジャーク制限値はカーブの傾きを制限します。
ジャーク制限加速の選択と選択解除
MD 20600: MAX_PATH_JERK(パス関連最大ジャーク)で設定された値に基く
ジャーク制限を有する加速プロファイルは次によって起動されます。
• NC パートプログラム中のプログラムコード SOFT
パートプログラムで SOFT をプログラムするのはモーダルで,ステップ状の加
速プロファイルを選択解除します。SOFT がパス軸を有するブロック中でプロ
グラムされた場合,前のブロックはイグザクトストップで終了します。
• 初期設定としての SOFT
SOFT が MD 20150: GCODE_RESET_VALUES(G グループの初期設定)
(GCODE_RESET_VALUES[20] = 2) の初期設定で前もって設定されている場合,
ジャーク制限はパートプログラムの処理が始まるとき,アクティブになりま
す。
SOFT が選択されたとき,図 1.43 に示される加速プロファイルは
MAX_PATH_JERK(パス関連最大ジャーク)の設定に関係なく起動されます。
アクティブなジャーク値は,この値が電源オンの状態でしか起動されないた
め,NC パートプログラムで MD 20600: MAX_PATH_JERK を上書きしても変更
されません。
アクティブなジャーク値は NC パートプログラムで SD 42510:
SD_MAX_PATH_JERK を上書きすることで変更できます。
ジャーク制限を有する加速は次によって終了させられます。
• NC パートプログラムのプログラムコード BRISK
プログラムコード BRISK はモーダルです。パス軸がブロックで BRISK でプロ
グラムされた場合,前のブロックはイグザクトストップで終了します。BRISK
は v/t 直線速度制御と連係して急激な加速変化を有するプロファイルを起動さ
せます。
• デフォルト値としての BRISK
マシンデータ MD 20150: GCODE_RESET_VALUES(G グループの初期設定)
は初期設定 (GCODE_RESET_VALUES[20] = 1) として BRISK に設定することが
できます。ステップのような加速プロファイルはパートプログラムの処理を開
始したとき,モーダルにアクティブになります。
これは標準インストールの場合の設定モードです。
加速プロファイル SOFT と BRISK はそれぞれ異なった方法で生成されます。この
ため,MD 20600: MAX_PATH_JERK の設定に関係なく,SOFT プロファイルは同じ
距離と加速レートでも BRISK より常に長いトラバース時間を必要とします。
1-201
アプリケーション
パス関連ジャーク制限はオペレーションモード AUTO と MDA で補間パス軸で使
われます。SOFT と BRISK の加速プロファイルはトラバースモードのイグザクト
ストップ G09,G60,連続パスモード G64,G641,そして先読みで使えます。これ
らのプロファイルはドライランフィードレートファンクションでもアクティブで
す。急速停止を引起こすアラームでは,いずれの加速プロファイルもアクティブ
でなくなります。
急激な加速変化と定速移動のプロファイル
BRISK 加速プロファイルでは,加速から制動への直接の切換えは,セットポイン
ト速度に到達できないような短いブロックで起こります。この遷移は極めて大き
な加速度の急変を必要とします。この急変を和らげるために,加速相と減速相と
の間に,設定された最短持続時間だけ一定した速度で軸を移動させることができ
ます。これによって,加速の急変は 2 つに分割されます。一定速度移動の持続時
間は MD 20500: CONST_VELO_MIN_TIME(一定した速度での最短時間)で設定
できます。
MD 20500: CONST_VELO_MIN_TIME の設定による定速移動は次のものでは実行
されません。
• 先読み
• 移動時間が 1 つの IPO サイクル以下であるブロック
a パス
短いブロックでの
加速挙動
a パス ,+,max
一定した移動の最短
持続時間での加速挙動
a パス ,-,max
短いブロックでの速度挙動
一定した移動の
最短持続時間での
速度挙動
v パス
a:加速
v:速度
t:時間
図 1.44 一定した移動の最短持続時間がある場合とない場合の短いブロックでの加速
および速度挙動
1-202
■ 加速制限
要求事項
モーションコントロールの要求事項は固定的に設定されたマシンデータを使うこ
とで満足することができます。慣性モーメントの違いや運転モード(位置決め,
荒加工,仕上げ切削)の違いによる個別の要求事項は,加速および制動ランプの
動的応答の最適化を必要とします。
1 つの方法として,プログラム可能な軸加速制限を使用する方法があります。他の
制限としては設定データによる加速制限があります。この制限値を計算に含める
かどうかを,別の設定データによって示さなければなりません。
さらに,動的応答は BRISK と SOFT のキーワードで適用されます。しかし,切換
えが粗くなりすぎることがあります。このため,許容ジャーク値を追加の設定
データを介して適用することができます。
機能性
軸制限値から求められた制限に加えて,SD 42500: SD_MAX_PATH_ACCEL を設定す
ることによってパス加速制限値を指定することもできます。設定データは,SD
42502: IS_SD_MAX_PATH_ACCEL がセットされていれば,制限計算に含まれます。
SD 42510: SD_MAX_PATH_JERK をセットすることによって,MD 20600:
MAX_PATH_JERK に設定されている値に追加ジャーク制限を適用することができ
ます。この設定データは SD 42512: IS_SD_MAX_PATH_JERK がセットされていれ
ば,ジャーク制限計算に含まれます。
(注)SD 42500: SD_MAX_PATH_ACCEL は,その値が軸動作とマシ
ンデータ MA_MAX_AX_ACCEL[AxNo] ,
MA_MAX_AX_VELO[AxNo] より求められた制限値より低い
場合にのみ考慮されます(加速をプログラムで減じることが
できるように)。
SD 42510: SD_MAX_PATH_JERK は,その値が MD 20600:
MAX_PATH_JERK でセットされた値より低い場合にのみ有効
となります。
起動
設定データは,ダウンロード,MMC,あるいはパートプログラムを介してセット
および起動できます。
プログラムされた値は SRAM が消去されるまでは有効です。
パートプログラム中での SD 設定の例
$SC_SD_MAX_PATH_ACCEL=2
$SC_SD_MAX_PATH_JERK=(0.8*$MC_MAX_PATH_JERK)=0.8•100=80
$SC_IS_SD_MAX_PATH_ACCEL=TRUE
$SC_IS_SD_MAX_PATH_JERK=TRUE
1-203
制御系の応答
制御系は,電源オン,運転モード切換え,リセット,ブロックサーチ,REPOS に
応答します。
最後に設定された値が有効です。初期設定はコールドスタート後に適用されます。
§ SC_IS_SD_MAX_PATH_ACCEL=FALSE
§ SC_SD_MAX_PATH_ACCEL=10
$SC_IS_SD_MAX_PATH_JERK=FALSE
$SC_SD_MAX_PATH_JERK=1000
■ 軸関連ジャーク制限
パス関連ジャーク制限に加えて,ジャーク制限を各軸についてパス補間とは独立
してセットできます。
補間器レベルのジャーク制限
軸別ジャーク制限は,従来の運転モードで移動する軸についてプログラムするこ
とも,位置決め軸モードで移動する軸についてもプログラムすることができます。
加速挙動はパス関連ジャーク制限の SOFT 加速プロファイルと同様で,固定的に
軸別にマシンデータにセットされます。この制限はこのモード軸では選択解除で
きません。
ジャーク制限がプログラムされる軸は MD 32420: JOG_AND_POS_JERK_ENABLE
(軸ジャーク制限の初期設定)で選択できます。
最大許容軸ジャークは MD 32430: JOG_AND_POS_MAX_JERK(軸ジャーク)に保存
されています。これは許容される軸加速変化を制限します。MD 32300:
MAX_AX_ACCEL(軸加速)にプログラムされているジャーク値と加速レートが考慮
され,加速変更が行われる時間が計算されます。許容される加速レート変化の範囲
は,0 から MD 32300: MAX_AX_ACCEL に保存されている軸加速値までの間です。
ジャーク値は,リセットで有効となるので,NC パートプログラムで MD:32430
JOG_AND_POS_MAX_JERK を上書きしてもアクティブなジャーク値を変更するこ
とはできません。セットされた新しい値は次のプログラム開始で有効になります。
軸ジャーク制限は両方の位置決め軸タイプについて AUTO と MDA モードでアク
ティブになります。
ジャーク制限は軸について JOG モードで次の場合にアクティブになります。
• ジョグ
• ハンドル送り
• 再位置決め
• 教示 (teach in)
ジャーク制限は次の場合はアクティブにはなりません。
• 基準点アプローチ
• 急速停止を招くアラーム
1-204
位置コントローラのジャーク制限
もうひとつの軸別ジャーク制限を,補間器レベルで起動できるジャーク制限とは
独立して,位置コントローラにセットできます。ジャーク制限は,軸がトラバー
スしているモードに関係なく,どんな軸動作についても軸セットポイント変化を
平滑します。補間器レベルの加速制限はこの制限でさらに平滑化されます。プロ
グラムコードまたは補間信号によって制御できない場合は,この制限は MD 32400:
AX_JERK_ENABLE(軸ジャーク制限)で軸別にイネーブルされ,MD 32410:
AX_JERK_TIME(軸ジャークフィルタの時定数)を使って平滑フィルタタイマと
一緒にセットされます。
(注)軸ジャーク制限は次のような場合に効果的です。
・IPO レベルの平滑化時間が長すぎるとき,たとえば制限がひとつの IPO サイクル
内で要求されているとき。
・100 % のトラバースのフィードフォワード制御が難しすぎると思われるため,速
度フィードフォワード制御の効果を減少させる必要があるとき。MD 32410:
AX_JERK_TIME の設定を大きくすると,軸の動作反応は和らげられます(ただし
対応して輪郭精度の減少を伴う)。
・特定のブロック遷移において振動を減少させる必要があるとき(たとえば,直線
→ 円)
。
この軸セットポイント変化の平滑化は,たとえ補間マシン軸に同じフィルタ時間
がセットされていても,直線ブロック以外で輪郭のひずみを引き起こします。輪
郭のエラーにより,円形の輪郭の半径が小さくなりすぎるということが起こりま
す。同じ速度で同じ半径がプログラムされている場合,輪郭のエラーはフィルタ
時間を長くすると大きくなります。ジャーク制限は,軸をフォローアップに切替
えるアラームが発生した場合にのみアクティブでなくなります。
注意
有効なサーボゲイン係数は軸ジャーク制限がプログラムされると減少します。
このことは,同一のサーボゲイン係数(たとえば「急速タッピング」
)を持たなけ
ればならない軸/スピンドルの場合,特に重要です。
一般的に,MD: AX_JERK_TIME に約 20 ~ 30 ms より高い値を入力しても意味があ
りません(サーボゲイン係数および輪郭精度が減少するため)
(サービス画面に注
意すること)。
パス関連ジャーク制限 (MD: MAX_PATH_JERK, MD: JOG_POS_MAX_JERK) は常に
最初に使われるべきです。このオプションが十分でない場合,MD:
AX_JERK_TIME を極めて低い値 (< 5 ms) にセットすべきです。より平滑な軸動作
が要求され,輪郭精度の度合いが十分であるときは(円形テストでチェックする
こと),AX_JERK_TIME の値を大きくすることができます。
1-205
■ プログラム可能な加速
ファンクションの目的
クリティカルなプログラムセクションでは,MD 32300: MAX_AX_ACCEL(軸加
速)でプログラムされた最大軸加速レートを制限する必要があるかもしれません。
たとえば,機械的な振動を避けるため,
「プログラム可能な加速」ファンクション
(1.4.3「補足条件」を参照)が使われることがあります。
機能性
コマンド
ACC [ マシン軸名 ] = パーセンテージ
は各マシン軸について > 0% から ≦ × 200 % のパーセント値をセットするために
プログラムできます。補間は MD: MAX_AX_ACCEL に保存されている,この最大
軸加速パーセントを超えない加速を使用して実行されます。
適用範囲
この制限は AUTOMATIC と MDA モードのすべての補間タイプに有効です。
次のことに注意してください。
• 制限は JOG モードまたは基準点アプローチ中はアクティブにはなりません。
• コマンド ACC は即座にモーダルにアクティブになります。
• コマンド ACC [ マシン軸名 ] = 100 を使用すると,制限はアクティブでなくな
ります。
• リセットまたはプログラムの終了で,最大軸加速が 100 % アクティブになります。
• 制限はドライランフィードレートでもアクティブになります。
エラーステータス
加速制限は,位置制御ループを開いて急速停止するようなエラーステータスではア
クティブではなくなります(軸は設定速度の制動ランプに従って停止するため)。
1-206
1.4.3 補足条件
ファンクションの可用性
「プログラム可能な加速」
このファンクションはオプションです。
加速制限
このファンクションはオプションです。
1-207
1.4.4 データの説明 (MD,SD)
■ 軸別マシンデータ
32300
MD 番号
MAX_AX_ACCEL
軸加速
初期設定:1
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:m/s2,rev/s2
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
加速とは単位時間当たりの軸速度の変化である。異なった軸が必ずしも同じ
加速でなければならないということはない。補間に関連するすべての軸の最
低加速値が考慮される。
回転軸の場合,入力された値は角加速に対応する。MTB は連続する減速と加
速のどちらにマシンが適しているかを決める必要がある。この値はマシン
データで入力される。加速値はすべてのタイプの加速と遅延オペレーション
においてアクティブである。
この MD は次の場合は無効
急速停止を招くようなエラーステータス
32300
MD 番号
MAX_AX_ACCEL
軸加速
図 1.45
急速トラバース
同じ傾度
関連性
MD 32210: MAX_ACCEL_OVL_FACTOR
(軸速度ステップ変化についての過負荷係数)
MD 20610: ADD_MOVE_ACCEL_RESERVE
(オーバーライド動作についての加速マージン)
32400
MD 番号
AX_JERK_ENABLE
軸ジャーク制限
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:1.1
意味:
軸ジャーク制限ファンクションをすべてのモードで有効にする。
制限は時定数を介してセットされ,常にアクティブである。
制限は,
「パス関連最大ジャーク」
,「膝形加速特性」
,および JOG または位置
決めモードで運転される軸の軸方向ジャーク制限とは独立して機能する。
関連性
MD 32410: AX_JERK_TIME(軸ジャーク制限の時定数)
1-208
32410
MD 番号
AX_JERK_TIME
軸ジャークフィルタの時定数
初期設定:0.001
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:
NEW_CONF
保護レベル:2
単位:s
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
軸セットポイント変化を和らげる軸ジャークフィルタの時定数。ジャーク
フィルタは時定数が位置制御サイクルより大きい場合のみアクティブになる。
この MD は次の場合は無効
フォローアップモードへの変更を引き起こすエラーステータス(たとえば
EMERGENCY STOP(緊急停止))
例外,エラー
同一の時定数が互いに補間し合うマシン軸でプログラムされなければならな
い(たとえば「急速タッピング」において)
。
関連性
MD 32400: AX_JERK_ENABLE(軸ジャーク制限)
32420
MD 番号
JOG_AND_POS_JERK_ENABLE
軸ジャーク制限の初期設定
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:-
データタイプ:BOOLEAN
適用開始 SW バージョン:1.1
意味:
JOG および REF モードと,位置決め軸オペレーションにおいて,軸別ジャー
ク制限ファンクションをイネーブルにする。
関連性
MD 32430: JOG_AND_POS_MAX_JERK(軸ジャーク)
32430
MD 番号
JOG_AND_POS_MAX_JERK
軸ジャーク
初期設定:1000
最小入力リミット:0.0
最大入力リミット:プラス
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:0.1 m/s3,rev/s3
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
ジャーク制限値は,JOG および REF モードと,位置決め軸オペレーションで
軸加速変化率を制限する。設定と時間計算は MD 20600: MAX_PATH_JERK
(パス関連最大ジャーク)の場合と同じ。
この MD は次の場合は無効
急速停止を招くようなパス補間とエラーステータス。
関連性
MD 32420: JOG_AND_POS_JERK_ENABLE(ジャーク制限の初期設定)
1-209
35220
MD 番号
ACCEL_REDUCTION_SPEED_POINT
減少した加速での速度
初期設定:1.0
最小入力リミット:0.0
最大入力リミット:1.0
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:係数
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
マシンデータは加速減少が開始するスピンドル/位置決め軸の速度を定義す
る。基準は定義されている最高速度である。開始点は最高値のパーセンテー
ジになる。
例:MD: ACCEL_REDUCTION_SPEED_POINT = 0.7,最高速度は 3000 min-1。
von = 2100 min-1 で開始した加速減少。つまり最高加速能力が 0 ~ 2099.99min-1
の速度範囲で使用された場合。2100 min-1 から最高速度までは,オペレーショ
ンは減少した加速で行われる。
関連性
MD 32000: MAX_AX_VELO(最高軸速度)
MD 35130: GEAR_STEP_MAX_VELO_LIMIT(最高ギアステージ速度)
MD 35230: ACCEL_REDUCTION_FACTOR(減少した加速)
35230
MD 番号
ACCEL_REDUCTION_FACTOR
減少した加速
初期設定:0.0
最小入力リミット:0.0
最大入力リミット:1.0
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:係数
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
マシンデータは,スピンドル/位置決め軸の加速が最高速度に関連して減少
される係数を含む。加速は MD: ACCEL_REDUCTION_SPEED_POINT に定義
される開始速度と最高速度の間の係数だけ減少する。
例 : a= 10 rev/s2,v on = 2100 min-1,MD: ACCEL_REDUCTION_FACTOR = 0.3。
加速および減速は 0 ~ 2099.99 min-1 の速度範囲で,10 rev/s2 の加速で行われ
る。2100 min-1 から最高速度までは,加速は 10 rev/s2 から 7 rev/s2 まで減少さ
れる。
この MD は次の場合は無効
関連性
急速停止を招くエラー
MD 32300: MAX_AX_ACCEL(軸加速)
MD 35200: GEAR_STEP_SPEEDCTRL_ACCEL
(開ループ速度制御モードでの加速)
MD 35210: GEAR_STEP_POSCTRL_ACCEL
(閉ループ位置制御モードでの加速)
MD 35242: ACCEL_REDUCTION_SPEED_POINT(減少した加速での速度)
1-210
■ チャンネル別マシンデータ
20500
MD 番号
CONST_VELO_MIN_TIME
一定速度での最短時間
初期設定:0.0
最小入力リミット:0.0
最大入力リミット:***
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:s
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
設定速度に到達しない短いブロックでの加速から減速への遷移の,一定速度
での最短時間を定義する。少なくともいくつかの IPO サイクル時間を入力す
ることで,加速から減速相への直接の遷移を防ぎ,加速急変を半分に減らす。
この加速制限は加速プロファイルが BRISK(硬)の場合にのみアクティブに
なる。
この MD は次の場合は無効
先読みはこのファンクションを考慮しない。
20600
MD 番号
MAX_PATH_JERK
パス関連最大ジャーク
初期設定:100
最小入力リミット:0
最大入力リミット:プラス
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:m/s3
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
ジャーク制限はパス加速を SOFT(軟)モードで制約する。パス加速をジャー
ク制限値で割ると加速変更が起こる時間が求められる。
例:
ジャーク制限値 パス加速 時間
100 m/s3 1 m/s2 0.01 s
100 m/s3 2 m/s2 0.02 s
100 m/s3 3 m/s2 0.03 s
200 m/s3 2 m/s2 0.01 s
300 m/s3 3 m/s2 0.01 s
この MD は次の場合は無効
急速停止を招くエラーステータス。制限は位置決め軸では引続き無効。
20610
MD 番号
ADD_MOVE_ACCEL_RESERVE
オーバーレイド動作の加速マージン
初期設定:0.2
最小入力リミット:0.0
最大入力リミット:0.9
変更は直ちに有効となる:電源
オン
保護レベル:2
単位:-
データタイプ:DOUBLE
適用開始 SW バージョン:1.1
意味:
このマシンデータは,速度制御のオーバーライド動作で十分に加速を確保す
るために,パス動作により得られた加速マージンを定義する係数を含む。
係数の 0.2 はパス軸が正規のオペレーションでパス加速が 80 % 利用されるこ
とを意味する。オーバーライド動作の要求があったときのみ,パス加速が 100
% 利用される。
この MD は次の場合は無効
急速停止を招くエラーステータス。制限は位置決め軸では引続き無効。
例外,エラー
現在のところ,マシンデータは "Fast retraction"(高速後退)が最初に起動され
ている場合にのみ考慮される。
関連性
MD 32300: MAX_AX_ACCEL(軸加速)
1-211
■ チャンネル別設定データ
42500
MD 番号
SD_MAX_PATH_ACCEL
最高パス加速
初期設定:10
最小入力リミット:0
最大入力リミット:
変更は直ちに有効となる:電源
オン
保護レベル:7
単位:m/s2
データタイプ:DOUBLE
適用開始 SW バージョン:3.1
意味:
(タンジェンシャル)パス加速の追加制限の設定データ
関連性
MD 32300: MAX_AX_ACCEL
SD 42502: IS_SD_MAX_PATH_ACCEL
42502
MD 番号
IS_SD_MAX_PATH_ACCEL
パス加速の追加制限を起動する SD
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:電源
オン
保護レベル:7
単位:
データタイプ:BOOLEAN
適用開始 SW バージョン:3.1
意味:
設定データ SD_MAX_PATH_ACCEL は SD が次の場合制限計算に含まれる。
IS_SD_MAX_PATH_ACCEL=TRUE
関連性
SD 42500: SD_MAX_PATH_ACCEL
42510
MD 番号
SD_MAX_PATH_JERK
(タンジェンシャル)パスジャークの追加制限のための SD
初期設定:100
最小入力リミット:
最大入力リミット:
変更は直ちに有効となる:電源
オン
保護レベル:7
単位:mm/s3
データタイプ:DOUBLE
適用開始 SW バージョン:3.1
意味:
最大パス関連ジャークは MD: MAX_PATH_JERK に加えて適用される。
関連性
MD 20600: MAX_PATH_JERK
SD 42510: IS_SD_MAX_PATH_JERK
42512
MD 番号
IS_SD_MAX_PATH_JERK
SD による(タンジェンシャル)パスジャークの追加制限を起動する SD
初期設定:0
最小入力リミット:0
最大入力リミット:1
変更は直ちに有効となる:電源
オン
保護レベル:7
単位:
データタイプ:BOOLEAN
適用開始 SW バージョン:3.1
意味:
設定データ SD_MAX_PATH_JERK は SD が次の場合制限計算に含まれる。
IS_SD_MAX_PATH_JERK=TRUE
関連性
SD 42510: SD_MAX_PATH_JERK
((タンジェンシャル)パスジャークの追加制限のための SD)
1-212
1.4.5 信号の説明
なし
1.4.6 例
なし
1.4.7 データフィールド,リスト
■ マシンデータ
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
20500
CONST_VELO_MIN_TIME
一定速度での最短時間
20600
MAX_PATH_JERK
パス関連最大ジャーク
20610
ADD_MOVE_ACCEL_RESERVE
オーバーライド動作で加速を確保する
軸別 ($MA_ ... )
32300
MAX_AX_ACCEL
軸加速
32400
AX_JERK_ENABLE
軸ジャーク制限
32410
AX_JERK_TIME Time
軸ジャークフィルタで一定
32420
JOG_AND_POS_JERK_ENABLE
軸ジャーク制限の初期設定
32430
JOG_AND_POS_MAX_JERK
軸ジャーク
32432
PATH_TRANS_JERK_LIM
ブロック境界のジオメトリ軸の最大軸ジャー
ク
35220
ACCEL_REDUCTION_SPEED_POINT
減少した加速での速度
35230
ACCEL_REDUCTION_FACTOR
減少した加速
1.3 (B1)
■ 設定データ
番号
識別子
名称
チャンネル別 ($SC_ ... )
42500
SD_MAX_PATH_ACCEL
最大パス加速
42502
IS_SD_MAX_PATH_ACCEL
パス加速の追加制限の起動のための SD
42510
SD_MAX_PATH_JERK
42512
IS_SD_MAX_PATH_JERK
(タンジェンシャル)パスジャークの追加制限のためのSD
SD による(タンジェンシャル)パスジャークの追加制限
を起動する SD
1-213
参照
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
1-214
1.5 診断機能 (D1)
1.5.1 概略説明
統合診断ツール
最終顧客あるいは現場で作業するサービス技術員用に,テストエイドが診断ツー
ルとして制御システム中に統合されています。下記の情報が操作パネルの「診断」
オペレーションエリアに表示されます。
• 制御システムあるいはドライブからのアラームとメッセージのテキスト表示
• 下記のステータス表示:
- NCK,MMC ,PLC 間,および PLC と PLC I/O モジュール間のインタフェー
ス信号
- データブロック
- PLC フラグ,タイマおよびカウンタ
- PLC の入出力
• サービス画面
- 軸/主軸の実際値およびステータスに関する情報(たとえば,位置指令/実
際値,ドライブステータス,実際の現在値,追従偏差,輪郭のずれなど)
- 通信エラーログ NC/PLC/MMC
- 関連するシステム変更点を含むログブック(たとえば,変更されたパスワー
ド)
- 現在利用可能なシステム SW バージョンを示すバージョン画面
テスト目的で信号のステータスと信号の組合わせを変更できます。
外部診断ツール
611D スタートアップツールが,ドライブシステムを最適化し機械的特性を分析す
るためのツールとして提供されています。
PCIN プログラムを使用すると,マシンデータ,設定データ,パートプログラムな
どを保存することができます。
1-215
1.5.2 詳細説明
■ アラーム,メッセージおよびアラームログ
■ 一般事項
現在発生しているか,あるいはまだ認識されていないアラームおよびメッセージ
は診断オペレーションエリアに表示されます。
発生したアラームと発生時刻がアラームログに記録されます。
発生する可能性のあるアラームの詳細説明が次に示されています。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
工作機械メーカーがプログラムしたアラームおよびメッセージ(値の範囲など)
については,そのメーカーが提供している文書の関連項目を参照してください。
■ NCK アラームハンドラ
アプリケーション
アラームハンドラは,NCK 上でのアラームの起動と管理のためのインフラストラ
クチャを提供します。
ファンクション
• システムの電源投入以降に発生し,まだリセットされていないアラームを最大
16 個までバッテリバックアップします。
• アラームに対するリアクションを,チャンネル別,モードグループ別,あるい
は NCK 別リアクションとしてプログラムできます。
• NoReady リアクションはチャンネル別のリアクションとしてプログラムできま
す。
起動
NCK 中でエラーステータスが検出されるとアラームハンドラが自動的に起動し,
アラームを出力します。
アラームは,言語命令 SETAL を有するパートプログラムによっても生成されま
す。
参照: YS840DI ユーザーズマニュアル・プログラミング編
(注)NCK 中で現在アクティブなアラームは,操作パネルインタ
フェースを介して読取られます。
外部からアラームを NCK にセットすることはできません。
アラーム ID が 60000 ~ 60999 までのアラームはパートプログラム中で起動するこ
とができます。
1-216
データバックアップ
電源投入時に,アラームハンドラデータは完全に再初期化されます。これはア
ラームハンドラデータはバッテリでバックアップされた SRAM 中には保存されな
いからです。
適合性
SW バージョン 4 以降
ソフトウェアバージョン 4.1 以降については,アラームに対してチャンネル別信号
CHANNEL_NOREADY を VDI インタフェースにセットすることができます。
SW 3.x およびそれ以前
チャンネル別信号 CHANNEL_NOREADY がこのファンクションに使用されている
かどうかを確認するために,MD 11412: ALARM_REACTION_CHAN_NOREADY
がセットされます。これによって以前のバージョンの PLC でも適合性が保証され
ます。
初期設定:CHANNEL_NOREADY 信号は使用されません。
チャンネル別の NOREADY 信号を指定しているアラームは,モードグループ別の
NOREADY 信号に再構成されます。
クリア条件
各アラームについてアラームをクリアしてもよいかどうか指定する必要がありま
す。クリア条件として次のいずれかを指定してください。
• POWERONCLEAR
アラームは制御装置の電源を一旦オフにして再度オンにすることでクリアされ
ます。
• RESETCLEAR
アラームはアラームが発生したチャンネルのリセット (Reset) キーを押すとク
リアされます。
• CANCELCLEAR
アラームは任意のチャンネルでキャンセル (Cancel) キーを押すとクリアされま
す。このアラームは,NC スタートあるいはリセットでもキャンセルできます。
• NCSTARTCLEAR
アラームはアラームが発生したチャンネルでプログラムをスタートするとクリ
アされます。アラームはリセットでもキャンセルできます。
• CLEARHIMSELF
アラームはオペレータの入力あるいはアクションによってはクリアされず,
NCK ソースコード中にプログラムされた "clearAlarm" によって明示的にクリア
されます。
• BAGRESETCLEAR
アラームは "BAGRESETCLEAR" コマンドによってキャンセルされるか,ある
いは関連するモードグループの全チャンネルでリセットを実行することでキャ
ンセルされます。
• NCKRESETCLEAR
アラームは "NCKRESETCLEAR" コマンドによってキャンセルされるか,ある
1-217
いは全チャンネルでリセットを実行することでキャンセルされます。
アラーム画面制御
アラーム出力の範囲はマシンデータを介して変更できます。
• MD11410: SUPPRESS_ALARM_MASK
特別なアラーム出力を抑止するための画面様式
• MD 11411: ENABLE_ALARM_MASK
特別なアラーム出力を起動するための画面様式
これらのマシンデータの詳細については,1.5.4「データの説明 (MD, SD)」を参照
してください。
■ サービス画面
オペレーション
サービス画面の操作方法については次を参照してください。
参照: YS840DI ユーザーズマニュアル・操作編
(注)MMC 102/103 上で垂直ソフトキー PARTVIEW/
OVERALLVIEW を使用することで,画面間の切替えを行うこ
とができます。部分図中のデータは短期間で更新されます。
■ 送り軸/主軸サービス画面
送り軸,および主軸のインストレーションと診断用に,次の図に示される情報を,
それぞれの軸/主軸について,操作パネルを介して診断オペレーションエリアに
呼出すことができます。
診断エリアの選択と操作は次で説明しています。
参照: YS840DI ユーザーズマニュアル・操作編
1-218
アプリケーション
この情報は次の目的のために使用されます。
• 指令ブランチをチェックする。
(たとえば,位置指令,速度指令,主軸速度指令プログラム)
• 実際値ブランチをチェックする。
(たとえば,実際のポジション値のエンコーダ 1/2,実際の速度値)
• 位置制御ループを最適化する。
(たとえば,追従偏差,制御のずれ,サーボゲイン係数)
• 軸の閉ループシステム全体をチェックする。
(たとえば,位置指令と実際の位置,あるいは速度指令と実際の速度値とを比
較して)
• ハードウェアエラーをチェックする。
(たとえば,エンコーダをチェックすることによって。軸を物理的に移動した
ならば,実際の位置値が変化しなければならない。
)
• 軸監視ファンクションをセットしチェックする。
図 1.46 軸/主軸サービス画面
図の説明
Following error(追従偏差)
位置指令値とアクティブになっているエンコーダ 1 あるいは 2 の実際の位置値と
の差。
単位 : mm,インチ,度
1-219
Control deviation(制御のずれ)
位置コントローラ入力の位置指令値とアクティブになっているエンコーダ 1 ある
いは 2 の実際の位置値との差。
単位 : mm,インチ,度
Contour deviation(輪郭のずれ)
この値は,現在の輪郭のずれを示しています(負荷が変化することによって速度
コントローラでの補正プロセスによって発生する追従偏差の変動)
。
輪郭のずれは,位置指令から得られた予め計算された実際の位置値と,アクティ
ブになっているエンコーダ 1 あるいは 2 の実際の位置との差に基づいています。
単位 : mm,インチ,度
Servo gain factor (calculated)(サーボゲイン係数(計算値))
画面に表示されるサーボゲイン係数は,下記の等式に従って NC によって計算され
ます。
速度指令
サーボゲイン係数=
;
追従偏差
[m/min]
単位(初期設定の)
:
[mm]
;
速度指令値 = 軸/主軸に現在出力されている指令値
参照: 1.8 位置指令単位と検出単位(G2)
Active measuring system(アクティブなエンコーダ)
この行はエンコーダ 1 か 2 のいずれがアクティブになっているのかを示していま
す。
Actual position value measuring system 1/2(実際の位置エンコーダ
1/2)
エンコーダ 1/2 で測定された軸の実際位置。位置はマシン座標系で表示されます
(ゼロ点オフセットあるいはツールオフセットは含まれません)
。
単位 : mm,インチ,度
Position setpoint(位置指令値)
補間器から位置コントローラに送られた指令位置。
単位 : mm,インチ,度
1-220
Abs. compensation value meas. system 1 and 2(絶対補正値エン
コーダ 1 あるいは 2)
エンコーダ 1 あるいは 2 について絶対補正値を表示します。補正値は,現在の軸
位置でのバックラッシュ補正とピッチエラー補正との合計です。
単位 : mm,インチ,度
Beam sag and temperature compensation(直角度および温度補正)
直角度補正と温度補正の合計に基づいて現在の軸位置について計算された補正値
を表示します。
単位 : mm,インチ,度
Actual speed value(実際の速度値)
エンコーダからのパルスが NC によって評価され表示されます。
単位 : %
100% は最高速度を意味します(アナログインタフェースでの 10 V に相当します;
MD 1401: MOTOR_MAX_SPEED にプログラムされた,ドライブでの最高速度(最
大モータ速度に対応する速度))
。
Speed setpoint(速度指令値)
ドライブに送られた速度指令(位置コントローラとフィードフォワード制御から
の速度指令値)
。
単位 : %
100 % は最高速度指令値に対応しています(アナログインタフェースでの 10 V に
相当し,ドライブ用の最大速度)。
Spindle speed setpoint programmed(プログラムされた主軸速度指
令値)
ユーザがプログラムした速度指令値。
単位 : rpm
例 : 入力 : S1000; 表示 : 1000 rpm
表示は主軸のみに適用。
Spindle speed setpoint current(現在の主軸速度指令値)
計算された補正値と運転上の速度制限を含む,正しい符号の付いた現在アクティ
ブになっている速度指令値(設定データあるいはマシンデータとしてプログラム
される)
。
単位 : rpm
表示は主軸のみに適用。
1-221
Override(オーバライド)
フィードレートおよび主軸オーバライドスイッチのアクティブなオーバライド係
数が表示されます。
単位 : %
Position offset for master axis/spindle actual value(マスタ軸/主軸
の実際値用の位置オフセット)
現在適用可能な位置オフセット値(実際値を基準にした)がこの行に表示されま
す。ただしこの場合,そのようなオフセット(マスタ軸とスレーブ軸との間の角
度オフセット)が主軸同期 "Synchronous spindle" ファンクション用に予めプログラ
ムされている必要があります。
単位 : mm,インチ,度
参照: 2.13 主軸同期(S3)
Position offset for master axis/spindle actual value(マスタ軸/主軸
の実際値用の位置オフセット)
現在適用可能な位置オフセット値(指令値を基準にした)がこの行に表示されま
す。ただしこの場合,そのようなオフセット(マスタ軸とスレーブ軸との間の角
度オフセット)が主軸同期 "Synchronous spindle" ファンクション用に予めプログラ
ムされている必要があります。
単位 : mm,インチ,度
参照: 2.13 主軸同期(S3)
Current gear stage(現在のギア状態)
現在の実際のギア状態がここに表示されます。
軸の場合は,主軸が軸に割り当てられている場合にのみこの値が表示されます。
この表示は IS "Actual Gear Stage" (DB31, ... DBX16.0 to 16.2) に対応しています。
参照: 1.17 主軸機能(S1)
Parameter set (axis)(パラメータセット(軸))
位置コントローラの 6 つのパラメータセットのどれがアクティブになっているか
を表示します。
たとえば,ギアチャンジが行われるとパラメータセットが変更されます。
参照: 1.8 位置指令単位と検出単位(G2)
1-222
Controller mode(コントローラモード)
現在のコントローラのステータスが表示されます。
0:
位置制御
1:
速度制御
2:
ホールド
3:
パーキング
4:
フォローアップ
5:
減速
コントローラのステータスの詳細説明については次を参照してください。
参照: 1.1 各種インタフェース信号(A2)
"Referenced" status display(
「基準化」ステータス表示)
基準点アプローチ用のステータス表示(軸)
ステータス 0: 位置エンコーダ 1 あるいは 2 のマシン軸が基準化されていない。
ステータス 1: マシン軸が基準点アプローチで基準点(相対エンコーダ)あるいは
目標点(距離がコード化された基準マークを有する直線エンコー
ダ)に到達した。
表示は IS "Referenced/synchronized 1 or 2" (DB31, ... DBX60.4 and 60.5) に対応。
参照: 1.16 原点復帰(R1)
Fixed stop reached(固定停止点到達)
「固定停止点へのトラベル」"Travel to fixed stop" ファンクションがアクティブのと
き,
「固定停止点到着」"Fixed stop reached" 条件を軸が満足しているかどうかを示し
ます (IS DB31..., DBX62.5)。
参照: 1.7 突き当て停止(F1)
Torque limitation value(トルク制限値)
FXST[x] あるいは SD 43510 でプログラムされた値を表示します :
FIXED_STOP_TORQUE あるいは MD 37010 で定義されたクランプトルク :
「固定停止点へのトラベル」"Travel to fixed stop" ファンクション用の
FIXED_STOP_TORQUE_DEF。
単位 : 最大トルクの %
参照: 1.7 突き当て停止(F1)
1-223
Safe actual position axis(安全実際位置軸)
NC で測定された現在軸の実際位置を表示します。
この実際位置は,「安全実際位置ドライブ」"Safe actual position drive" と同じ値を
持っていなければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
Safe actual position drive(安全実際位置ドライブ)
ドライブで測定された現在軸の実際位置を表示します。
この実際位置は「安全実際位置軸」"Safe actual position axis" と同じ値を持っていな
ければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
Safe input signals axis(安全入力信号軸)
「安全統合」"Safety Integrated" ファンクション用に定義された PLC の安全入力信号
を表示します。これらの入力信号のステータスは「安全入力信号ドライブ」"Safe
input signals drive" の入力信号のステータスに対応していなければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
Safe input signals drive(安全入力信号ドライブ)
「安全統合」"Safety Integrated" ファンクション用に定義されたドライブ(ドライブ
バス上の DMP)の安全入力信号を表示します。これらの入力信号のステータスは
「安全入力信号軸」"Safe input signals axis" の入力信号のステータスに対応していな
ければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
Safe output signals axis(安全出力信号軸)
「安全統合」"Safety Integrated" ファンクション用に定義された PLC の安全出力信号
を表示します。これらの出力信号のステータスは「安全出力信号ドライブ」"Safe
output signals drive" の出力信号のステータスに対応していなければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
1-224
Safe output signals drive(安全出力信号ドライブ)
「安全統合」"Safety Integrated" ファンクション用に定義されたドライブ(ドライブ
バス上の DMP)の安全出力信号を表示します。これらの出力信号のステータスは
「安全出力信号軸」"Safe output signals axis" の出力信号のステータスに対応していな
ければなりません。
参照: /FBSI/ Description of Functions, Safety Integrated
以下に,発生する可能性のある問題をより詳しく説明し,質問に対する回答を提
供します。
1-225
データの読取り
下図は閉ループシステムのどの点で送り軸および主軸情報が読取られるかを示し
ています。
現在の主軸速度指令
主軸
シード
指令
プログラム
フィード
フォワード
制御
位置指令
(速度指令)
速度指令 [%]
制御のずれ
補間器
(IPO)
ジャーク制
限およびダ
イナミック
マッチング
微補間器
位置コン
トローラ
制御
パラメータ
セット
制御
ループ
モデル
パワーセ
クション
実際の速度値 [%]
補正(バックラッシュ,
ピッチエラー)
絶対補正値
エンコーダ 1
アクティブな
エンコーダ
実際のエンコーダ位置 1
実位値の処理
実際のエンコーダ位置 2
サーボ係数(計算値)=
電流コン
トローラ
実際の速度
値の測定
輪郭のずれ
追従偏差
速度コン
トローラ
実位値の処理
たとえば別置
エンコーダ
から
速度指令値
追従偏差
絶対補正値エンコーダ 2
補正(バックラッシュ,
ピッチエラー)
イタリックのテキスト ⇒ 値はユーザインタフェース上に示される
図 1.47 送り軸および主軸情報の概略図
位置コントローラ設定チェック
サービス軸画面で位置コントローラ設定の簡単なチェックを行うことができます。
MD 32200 で番号 1 (KV = 1 に対応)を入力します :
POSCTRL_GAIN[n](サーボゲイン係数)。変更は直ちに実行されます。
これはサーボゲイン係数が以下のように定義されるからです:
[m/min]
速度
kV=
;( 初期設定 )
;
[mm]
追従偏差
フィードレートが 1 m/min で追従偏差が 1 mm となります(KV = 1 で定速の場合)
。
希望するサーボゲイン係数が実際の係数に対応していない場合は,以下に従って
原因を特定し,適切な対策を行ってください。
• MD 32260: RATED_VELO(定格モータ速度)
,MD 32250: RATED_OUTVAL
(定格出力電圧)
1-226
• 速度およびトルクフィードフォワード制御がオンになっている。
この場合は,MD 32200 で設定されているサーボゲイン係数よりも大きいサー
ボゲイン係数が表示されます:
POSCTRL_GAIN[n]
• ジャーク制限およびダイナミックマッチング用のフィルタが起動している。
この場合は,MD 32200 で設定されているサーボゲイン係数よりも小さいサー
ボゲイン係数が表示されます:
POSCTRL_GAIN[n]
アラーム診断
アラーム原因を特定するための診断用ツールとして次の情報が提供されます。
• 25040 "Zero speed monitoring"(ゼロ速度監視)
⇒ 追従偏差 > MD 36030: STANDSTILL_POS_TOL
(ゼロ速度公差)
• 25050 "Contour monitoring"(形状監視)
⇒ 形状監視 > MD 36400: CONTOUR_TOL
(形状監視用の公差範囲)
• 25060 "Speed setpoint limitation"(速度指令制限)
⇒ 速度指令値 > MD 36210: CTRLOUT_LIMIT
(最大速度指令値)
• 25080 "Positioning monitoring"(位置決め監視)
⇒ 追従偏差 > MD 36010: STOP_LIMIT_FINE
(正確停止,微)
• 25100 "Measuring systems cannot be switched over"(エンコーダを切換えることが
できない)
⇒ 実際の位置値エンコーダ 1 と 2 の差
>
MD 36500: ENC_CHANGE_TOL
(実際の位置取得用の最大公差)
• 26000 "Clamping monitor"(クランピング監視)
⇒ 追従偏差 > MD 36050: CLAMP_POS_TOL
(インタフェース信号 "Clamping active" のクランピング公差)
アラームが発生した場合の NC 制御の挙動と診断アクションについては次を参照し
てください。
参照: アラーム一覧
1-227
運転ステータスエラーの診断
運転ステータスエラーの分析を容易にするために次の情報が提供されます。
• The axis does not traverse even though a travel command has been given.(移動指令
が与えられているにもかかわらず軸が移動しない)
⇒ サーボオン信号が出ているかどうかチェックしてください。
位置制御あるいは速度制御(主軸制御用)はコントローラモードで起動す
る必要があります。
• Feedrate fluctuations.(送り速度変動)
⇒ 送り速度の変動は追従偏差あるいは実際の速度値で確認できます。
• Incorrect positioning.(位置決め不良)
⇒ 位置指令値と,エンコーダ位置 1/2 および絶対補正値 1/2 との比較。
• The cam is not detected by the PLC during referencing.(基準化中に PLC がカムを
検出しなかった)
⇒ "referenced" ステータス画面をチェックしてください。
• The reference point value displayed is incorrect.(表示されている基準点値が不正)
⇒ 基準化用に間違ったエンコーダを使用している可能性があります。
• The actual speed value of the main spindle drive shows heavy fluctuations.(主軸ドラ
イブの実際の速度値が大きく変動している)
⇒ MD 36300 のエンコーダ速度範囲の設定が高すぎます。
ENC_FREQ_LIMIT[n](エンコーダ制限周波数)がエンコーダデータシートで
指定されている値よりも高い値に設定されています。
• Spindle positioning is incorrect.(主軸の位置決めが不正)
⇒ 間違ったエンコーダが選択されているか,あるいは主軸が間違った原点信
号に同期化されています。
■ ドライブサービス画面
送りドライブ (FDD) および主軸ドライブ (MSD) の結合と診断用に,次の図に示さ
れる情報を,それぞれの軸/主軸について,操作パネルを介して診断 (Diagnosis)
オペレーションエリアに呼出すことができます。
1-228
アプリケーション
この情報は次の目的のために使用されます。
• イネーブルと制御信号のステータスをチェックする。
(たとえば,パスルイネーブル,ドライブイネーブル,モータ選択,指令パラ
メータセット)
• FDD/MSD オペレーションモードのステータスをチェックする。
(たとえば,セットアップモード,パーキング軸)
• 温度警告を表示する。
• 現在の指令/実際値画面をチェックする。
(たとえば,実際の位置値エンコーダ 1/2,速度指令,実際の速度値)
• ドライブステータス(ドライブレディ)をチェックする。
• 現在のランプアップ相を表示する。
• グループエラーメッセージ(メッセージステータスクラス 1)を表示する。
• ドライブステータスメッセージを表示する。
(たとえば,Threshold torque not reached(スレッショルドトルクに達していな
い)
,Minimum speed not reached(最低速度に達していない),Actual speed = set
speed(実際速度 = セット速度))
図 1.48 ドライブサービス画面
図の説明
個々のステータス表示,警告,メッセージなどを以下で説明します。
詳しくは次を参照してください。
参照: YS840DI API 取扱説明書
1-229
Drive enable(ドライブイネーブル)(端子 64/63)
この表示はドライブインフィード/再生フィードバックユニットの端子 64/63 のス
テータスに対応しています:
ステータス 1 : 中央ドライブイネーブル
ステータス 0 : 中央ドライブディスエーブル
この表示は MD 1700: TERMINAL_STATE(バイナリ入力ステータス)に対応して
います。
Pulse enable(パルスイネーブル)(端子 63/48)
この表示はドライブインフィード/再生フィードバックユニットの端子 63/48 のス
テータスに対応しています:
ステータス 1 : 中央パルスイネーブル
ステータス 0 : 中央パルスディスエーブル
この表示は MD 1700: TERMINAL_STATE(バイナリ入力ステータス)に対応して
います。
Pulse enable(パルスイネーブル)(端子 663)
この表示はドライブモジュールの端子 663 (リレー:安全オペレーション停止)
のステータスに対応しています:
ステータス 1 : モジュール別パルスイネーブル
ステータス 0 : モジュール別パルスディスエーブル
この表示は MD 1700: TERMINAL_STATE(バイナリ入力ステータス)に対応して
います。
PLC pulse enable(PLC パルスイネーブル)
PLC からのパルスイネーブルがドライブに入っているかどうかを示します:
ステータス 1: ドライブモジュール用のパルスが PLC によってディスエーブルさ
れています。
ステータス 0: このドライブのパルスイネーブルはアクティブになっています。
この表示は IS "Pulse enable" (DB31, ... DBX21.7) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Speed controller enable NC(速度コントローライネーブル NC)
この表示はドライブ用の速度コントローラが NC によってイネーブルされているか
どうかを示します:
ステータス 1: 速度コントローライネーブル = オフ
ステータス 0: 速度コントローライネーブル = オン
1-230
Ramp-function generator rapid stop(ランプファンクション発生器急
停止)
ランプファンクション発生器の急停止を示すステータスです:
ステータス 1: ランプファンクション発生器急停止はこのドライブについてはアク
ティブになっていません。
ステータス 0: ランプファンクション発生器急停止がアクティブになっています。
ランプファンクションの速度指令が 0 でなくても,またパルス抑止
になっていなくてもドライブは停止します。
この表示は IS "Ramp-function generator rapid stop" (DB31, ... DBX92.1) に対応してい
ます。
参照: 1.1 各種インタフェース信号(A2)
DC link status(DC リンクステータス)(ON/OFF)
この表示は次のドライブ警告を有しています:
ステータス 0: DC リンク電圧 = オン
ステータス 1: DC リンク電圧が警告スレッショルド未満
警告スレッショルドは MD 1604: LINK_VOLTAGE_WARN_LIMIT(DC リンク不足
電圧警告スレッショルド)でセットされている値に対応しています。
Enable pulses (パルスイネーブル)
このメッセージはドライブパルスがイネーブルされているかどうかを示します:
ステータス 0: ドライブモジュール用のパルスがディスエーブルされています。軸
/主軸は移動できません。
ステータス 1: ドライブモジュール用にパルスがイネーブルされています。軸/主
軸は移動できます。
この表示は IS "Pulses enabled" (DB31, ... DBX93.7) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Drive ready(ドライブレディ)
選択されたドライブの現在のステータスを示します:
ステータス 0: ドライブは準備できていません。
ステータス 1: ドライブは準備できています。
この表示は IS "Drive Ready" (DB31, ... DBX93.5) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
1-231
Ramp-up phase(ランプアップ相)
選択されたドライブの現在のランアップ相を示します:
意味 :
XYZ
内部コード
0
=
ソフトウェアがドライブモジュールにロードされている
1
=
ドライブモジュールの基本初期化完了
2,3
=
ドライブマシンデータ初期化
4
=
同期
5
=
周期オペレーション
CRC error(CRC エラー)
ハードウェア上で検出されたドライブと NC との間の通信エラーを示します。
(注)"0" 以外の値が表示された場合はお近くの SIEMENS 代理店ま
でご連絡ください。
ZK1 messages(ZK1 メッセージ)
ステータスクラス 1 のメッセージがアクティブかどうかを示します:
ステータス 0: ステータスクラス 1 のメッセージはアクティブになっていません。
ステータス 1: ステータスクラス 1 の 1 つあるいはそれ以上のメッセージがアク
ティブになっています。
ステータスクラス 1 のメッセージは次の特性を有するアラームです。
• 内部応答を発生させる(たとえば,再生ブレーキ,即時パルス抑制)
• モーダル (modal)
DC link voltage(DC リンク電圧)
ドライブグルーピング内の現在の DC リンク電圧レベルを示します。
単位 : ボルト
Speed setpoint(速度指令)
表示された速度指令はフィルタされていない合計指令値を表しています。速度指
令は,位置コントローラの出力成分と速度フィードフォワードブランチから構成
されます。
単位 : min-1
表示は MD 1706: DESIRED_SPEED(速度指令)に対応しています。
1-232
Actual speed value(実際の速度値)
表示された実際の速度値はフィルタされていない実際の速度値を表しています。
単位 : min-1
表示は MD 1707: ACTUAL_SPEED(実際の速度値)に対応しています。
Smoothed actual current value(平滑された実際の電流値)
平滑された実際の電流値を示しています。トルクを生成する電流の実際値が,パ
ラメータ化された時定数を使用して PT1 素子によって平滑されます。
単位 : %
100 % はパワーセクションの最大電流に対応しています。
表示は MD 1708: ACTUAL_CURRENT(平滑された実際の電流値)に対応していま
す。
Motor temperature(モータ温度)
温度検出器で測定されたモータの温度が示されます。
単位 : ℃
表示は MD 1702: MOTOR_TEMPERATURE(モータ温度)に対応しています。
Speed setpoint filter 1(速度指令フィルタ 1)
速度指令平滑ファンクションのステータスを示しています:
ステータス 0: 速度指令の平滑化が行われていません。
ステータス 1: 速度指令フィルタ 1 が低域通過フィルタとして構成されているの
で,IS "Speed setpoint smoothing" (DB31,... DBX20.3) で PLC によって
リクエストされた速度指令平滑はアクティブになっています。
表示は IS "Speed setpoint smoothing active" (DB31, ... DBX92.3) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
2nd torque limit(第 2 トルクリミット)
アクティブになっているトルクリミットを示します。
ステータス 0: トルクリミット 1 がアクティブ。
ステータス 1: トルクリミット 2 がアクティブ。
表示は IS "Torque limit 2 active" (DB31, ... DBX92.2) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
1-233
Integrator disable(積分器ディスエーブル)
速度コントローラの積分器がアクティブになっているかどうかを示します:
ステータス 0: 速度コントローラの積分器がイネーブルされています。
速度コントローラは PI コントローラとして機能します。
ステータス 1: そのドライブモジュールについて IS "Speed controller integrator
disable" (DB 31, ... DBX 21.6) が PLC によって設定されたために速度
コントローラの積分器がディスエーブルされています。このため,
速度コントローラは PI コントローラから P コントローラに切替わ
りました。
表示は IS "Speed controller integrator disabled" (DB31, ...DBX93.6) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Set-up mode(セットアップモード)
ドライブのオペレーションモード表示:
ステータス 0: そのドライブについて通常モードがアクティブになっています。
ステータス 1: そのドライブについてセットアップモードがアクティブになってい
ます。
表示は IS "Set-up mode active" (DB31, ... DBX92.0) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Parking axis(パーキング軸)
ドライブのオペレーションモード表示:
ステータス 0: 軸/主軸が通常モード。
ステータス 1: 軸/主軸がパーキング位置になっています。つまりエンコーダ別の
監視ファンクションと評価がすべてディスエーブルされています。
この状態でエンコーダを取外してもアラームは出ません。
Setpoint parameter set (drive)(指令パラメータセット(ドライブ))
ドライブの 8 個のドライブパラメータセットのうちのいずれが PLC によって起動
するかを示します。
表示は IS "Parameter set selection A, B, C" (DB31, ... DBX21.0 to 21.2) に対応していま
す。
参照: 1.1 各種インタフェース信号(A2)
1-234
Actual parameter set (drive)(実際のパラメータセット(ドライブ))
ドライブの 8 個のドライブパラメータセットのうちのいずれが現在アクティブに
なっているかを示します。
表示は IS "Active parameter set A, B, C" (DB31, ... DBX93.0 to 93.2) に対応していま
す。
参照: 1.1 各種インタフェース信号(A2)
Operating mode(オペレーションモード)
モータがフリードライブとして動作しているかメイン主軸ドライブとして動作し
ているかを示します。
Motor selection (star/delta)(モータ選択(スター/デルタ))
どのモータデータセットが PLC によって起動されるかを示します。現時点では,
メイン主軸ドライブ上でのスター/デルタ切替えにモータデータレコードが使用
されています。
次の割当てが適用されます:
モータ選択: アプリケーション: コード
Motor 1
MSD: スター運転
0
0
Motor 2
MSD: デルタ運転
0
1
Motor 3
予備
1
0
Motor 4
予備
1
1
この表示は MSD ドライブにのみ適用されます。
この表示は IS "Motor selection A,B" (DB31, ... DBX21.3 to 21.4) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Actual motor (star/delta)(実際のモータ(スター/デルタ))
どのモータデータセットが現在アクティブになっているかを示します。現時点で
は,メイン主軸ドライブ上でのスター/デルタ切替えにモータデータレコードが
使用されています。
次の割当てが適用されます:
モータ選択: アプリケーション: コード:
Motor 1
MSD: スター運転
0
0
Motor 2
MSD: デルタ運転
0
1
Motor 3
予備
1
0
Motor 4
予備
1
1
この表示は MSD ドライブにのみ適用されます。
この表示は IS "Active motor A,B" (DB31, ... DBX93.3 to 93.4) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
1-235
Position actual value measuring system 1/2(エンコーダ位置 1/2)
エンコーダ 1/2 によって測定された軸の実際の位置。
位置はマシン座標系で表示されます(ゼロ点オフセットあるいはツールオフセッ
トは含まれません)
。
単位 : mm,インチ,度
Heatsink temperature warning(ヒートシンク温度警告)
ドライブから出力される警告信号:
ステータス 0: ヒートシンク温度監視からの応答がありません。
ステータス 1: ヒートシンク温度監視から応答がありました。
表示は IS "Heatsink temperature warning" (DB31, ... DBX94.1) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Motor temperature warning(モータ温度警告)
ドライブから出力される警告信号:
ステータス 0: モータ温度は警告スレッショルド未満です。
ステータス 1: モータ温度が規定の警告スレッショルドを超えています。
警告スレッショルドは MD 1602: MOTOR_TEMP_WARN_LIMIT(最高モータ温度)
でセットされている値に対応しています。
この表示は IS "Motor temperature warning" (DB31, ... DBX94.0) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Ramp-up completed(ランプアップ完了)
ドライブのステータス表示:
ステータス 0: 新たに速度指令が定義されてからランアップファンクションがまだ
完了していません。
ステータス 1: 新たに速度指令が定義されてから,実際の速度値が速度公差範囲内
に入りました。
速度公差範囲は MD 1426: SPEED_DES_EQ_ACT_TOL( ’nset-nact’ 信号の公差範囲)
の設定に対応してします。
この表示は IS "Ramp-up completed" (DB31, ... DBX94.2) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
1-236
Torque lower than threshold setting(トルクがスレッショルド設定よ
りも低い)
ドライブのステータス表示:
ステータス 0: 静止状態(つまり,ランプアッププロシージャが完了した状態)に
おいて,トルク指令がスレッショルドトルクを超えています。
ステータス 1: 静止状態において,トルク指令がスレッショルドトルクに到達して
いません。
スレッショルドトルクは MD 1428: TORQUE_THRESHOLD_X(スレッショルドト
ルク)の設定に対応しています。
この表示は IS "Md < Mdx" (DB31, ... DBX94.3) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Speed lower than minimum setting(速度が最小設定よりも低い)
ドライブのステータス表示:
ステータス 0: 実際の速度値が最低速度を超えています。
ステータス 1: 実際の速度値が最低速度未満です。
最低速度は MD 1418: SPEED_THRESHOLD_MIN(’nact < nmin’ 信号の nmin)の設定
に対応しています。
この表示は IS "|nact| < nmin" (DB31, ... DBX94.4) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Speed lower than threshold setting(速度がスレッショルド設定より
も低い)
ドライブのステータス表示:
ステータス 0: 実際の速度値がスレッショルド速度を超えています。
ステータス 1: 実際の速度値がスレッショルド速度未満です。
スレッショルド速度は MD 1417: SPEED_THRESHOLD_X(’nact < nx’ 信号の nx)の
設定に対応しています。
この表示は IS "|nact| < nx" (DB31, ... DBX94.5) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Actual speed = set speed(実際の速度 = 設定速度)
ドライブのステータス表示:
ステータス 0: 新たに速度指令が定義されてから,実際の速度値が速度公差範囲内
に入っていません。
ステータス 1: 新たに速度指令が定義されてから,実際の速度値が速度公差範囲内
に入りました。
速度公差範囲は MD 1426: SPEED_DES_EQ_ACT_TOL( ’nset-nact’ 信号の公差範囲)
の設定に対応しています。
1-237
表示は IS "|nact| = nset" (DB31, ... DBX94.6) に対応しています。
参照: 1.1 各種インタフェース信号(A2)
Variable signal 1(可変信号 1)
611D の可変信号ファンクションのステータス表示。
可変信号ファンクションは,定義スレッショルドに違反がないかどうかメモリロ
ケーションを監視します。スレッショルドに加えて,公差範囲も定義できます。
この公差範囲はスレッショルド値に違反がないかどうかをスキャンするときに考
慮されます。この信号は ON 遅延時間あるいは OFF 遅延時間と組合わせることが
できます。
ステータス 0: スレッショルド値に達していません。
ステータス 1: スレッショルド値に達しています。
可変信号ファンクションは次の 611D マシンデータでパラメータ化されています:
PROG_SIGNAL_FLAGS
(ビット可変信号ファンクション)
PROG_SIGNAL_NR
(信号番号可変信号ファンクション)
PROG_SIGNAL_ADDRESS
(アドレス可変信号ファンクション)
PROG_SIGNAL_THRESHOLD
(スレッショルド可変信号ファンクション)
PROG_SIGNAL_HYSTERESIS
(ヒステリシス可変信号ファンクション)
PROG_SIGNAL_ON_DELAY
(ON 遅延時間可変信号ファンクション)
PROG_SIGNAL_OFF_DELAY
(OFF 遅延時間可変信号ファンクション)
Diagnostics for alarms(アラーム診断)
この情報は,アラームの原因を特定するための診断ツールとして提供されていま
す。
• 300300 "Ramp-up error"(ランプアップエラー)
⇒ ランプアップ相をチェックして,ドライブがどのランプアップ相まで到達
したかを確認してください。
• 25201 "Drive malfunction"(ドライブ故障)
⇒ ZK1 メッセージがセットされています。
⇒ 指令パラメータセット,モータ選択,DC リンクステータスをチェックして
ください。
アラーム 300500 ~ 300515 をチェックしてください。
• 25040 "Zero speed monitoring"(ゼロ速度監視)
25050 "Contour monitoring"(輪郭監視)
25060 "Speed setpoint limitation"(速度指令制限)
25080 "Positioning monitoring"(位置決め監視)
⇒ ドライブのイネーブル信号(たとえば,パルスイネーブル,ドライブイ
ネーブル,PLC によるパルスイネーブルが得られない)
。この場合には,pulses
enabled = OFF と表示されます。
• 300614 "Motor temperature exceeded"(モータ温度超過)
⇒ モータの現在の温度をチェックしてください。
1-238
アラームが発生した場合の NC 制御の挙動,および考えられる診断アクションにつ
いては次を参照してください。
参照: アラーム一覧
■ 通信ログ
MMC と NC との間で行われた通信は,診断 (Diagnosis) オペレーションエリアに,
古いものから順番にソフトキー Comm. log の下に表示されます。このエラーリス
トは,OEM アプリケーションの開発者が散発的なエラーの原因を特定しやすいよ
うにするために提供されているもので,通常のオペレーションには何ら関係があ
りません。
■ ログブック
診断オペレーションエリアで,ソフトキー Log book を押すことで表示されるログ
ブック画面には,システムに関係のあるすべての制御変更の詳細が自動的に表示
されます(たとえば,アクセスレベルの変更)。
■ バージョン
インストールされている MMC あるいは NC ソフトウェアのバージョンは,この画
面(ソフトキー Version の下の診断オペレーションエリア)からサービス技術員が
読取ることができます。
インストールされているすべてのソフトウェアモジュールのソフトウェアバー
ジョンが表示されます。
1-239
■ PLC ステータス
オペレーションエリア 「診断」"Diagnosis" 中の操作パネルから PLC ステータス信
号をチェックあるいは変更することができます。
アプリケーション
最終顧客あるいはサービス技術員は,プログラミングデバイスを使用することな
く,現場でこのファンクションを使用して次のことができます。
• PLC I/O の入出力信号をチェックする。
• ある程度のトラブルシューティングを行う。
• 診断目的でインタフェース信号をチェックする。
オペレーション
サービス画面の操作および切換え方法については次を参照してください。
参照: YS840DI ユーザーズマニュアル・操作編
ステータス表示
次のデータのステータスが操作パネルに表示されます。
• マシン制御パネルからのインタフェース信号
• マシン制御パネルへのインタフェース信号
• NCK と PLC の間のインタフェース信号
• MMC と PLC の間のインタフェース信号
• データブロック (DB 0 ~ 127)
• フラグ (FB 0 ~ 255)
• タイマ (T 0 ~ 127)
• カウンタ (C 0 ~ 63)
• 入力 (IB 0 ~ 127)
• 出力 (QB 0 ~ 127)
インタフェース信号 (DBx, DBBy) の分配については次を参照してください。
参照:
YS840DI API 取扱説明書
ステータスの変更
上記の信号のステータスは試験目的で変更することができます。信号を組合わせ
ることもできます。1 度に最大で 10 個までのオペランドを変更することができま
す。
1-240
■ その他の診断ツール
ドライブスタートアップツール
このプログラムのファンクションの一つは次のためにツールを提供することにあ
ります。
• 位置制御,速度制御および電流制御の主な量を評価する
• ドライブおよび制御データをアーカイブに保管する
• 任意の機械特性を分析する
ファンクションの使い方と完全な範囲については次を参照してください。
参照: YS840DI API 取扱説明書
データのアーカイブ
PCIN ソフトウェアパッケージを使用すると,マシンデータ,設定データ,パート
プログラムなどをアーカイブに保管することができます。
使い方については次の文書を参照してください。
参照: /PI/ PCIN 4.3
1-241
1.5.3 補足条件
なし。
1.5.4 データの説明 (MD,SD)
一般マシンデータ
11410
MD 番号
SUPPRESS_ALARM_MASK
初期設定 : 0
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
保護レベル : 2 / 7
単位 : -
特別アラーム出力を抑止するためのマスク
電源オン
データタイプ : DWORD
適用開始 SW バージョン : 2
意味:
特別アラーム出力を抑止するためのマスク。
ビットのセット : 対応するアラーム(警告)が出なくなる。
ビット 0: アラーム 15110 "Channel %1 block %2 REORG not possible"(REORG
不可)
ビット 1: アラーム 10763 "Channel %1 block %2 The path component of the block
in the contour plane is zero"(輪郭平面中のブロックのパス構成要素
がゼロ)
ビット 2: アラーム 16924 "Channel %1 Caution: Program testing can modify tool/
magazine data"(注意:プログラムテストでツール/マガジンデー
タが変わることあり)
注記:このアラームは単なるメッセージアラームである。
関連性
参照
1-242
11411
ENABLE_ALARM_MASK
MD 番号
特別アラーム表示
初期設定 : 0
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
リセット
保護レベル : 2 / 7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 4.1
意味:
通常は抑止されるアラームを生成するためのマスク。
ビットのセット :
このアラームグループのアラームが出力される。
ビットのリセット : このアラームグループのアラームは出力されない。
ビット 0: 応答 SHOWALARMAUTO を有するアラームが出力される。
( アラーム 16905)
アラームがオペレータの手動介入なしに自動モードでのみ発せら
れるようにするにはこのアラームリアクションをイネーブルにす
べきである。
ビット 1: 応答 SHOWWARNING を有するアラームが出力される。
このアラーム応答は通常は抑止される警告に使用する。
SW 5.1 以降
ビット 2: テクノロジアラーム 22280 "thread run-up distance too short"(スレッ
ドランアップ距離が短すぎる)が出力される。
関連性
参照
11412
MD 番号
ALARM_REACTION_CHAN_NOREADY
アラームリアクション CHAN_NOREADY 許可
初期設定 :
最小入力リミット :
最大入力リミット :
変更が有効になるための条件 :
保護レベル : 2 / 7
単位 : -
電源オン
データタイプ : BOOLEAN
適用開始 SW バージョン : 4.1
意味:
この MD がセットされていなければ,CHAN_NOREADY の代わりに
BAG_NOREADY が実行される。
SW バージョン 4.1 以降では,アラームに対する応答として,PLC 上で
CHANNEL_NOREADY をセットすることができる。この MD がセットされて
いなければ,アラームハンドラが CHAN_NOREADY を BAG_NOREADY に再
構成する。
この MD の唯一の目的は,バージョンが SW4.1 より古い PLC システムに対し
て適合性を提供することである。
関連性
1-243
11413
ALARM_PAR_DISPLAY_TEXT
MD 番号
アラームパラメータとしてのテキスト
初期設定 : 0
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
電源オン
保護レベル : 0/0
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 3
意味:
この MD がセットされていれば,番号の代わりにテキストがアラームパラ
メータとして出力できる。
11420
LEN_PROTOCOL_FILEX
MD 番号
プロトコルファイル用のファイルサイズ (KB)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 1 000 000
変更が有効になるための条件 :
リセット
保護レベル : 7/2
単位 : KB
データタイプ : DWORD
適用開始 SW バージョン : 4.3
意味:
WRITE コマンドを使用すればパートプログラムからのブロックをファイルに
保存できる。プロトコルファイルの長さは制限される。アラームが出力され
る。
1-244
1.5.5 信号の説明
なし
1.5.6 例
なし
1-245
1.5.7 データフィールド,リスト
■ インタフェース信号
DB 番号
ビット,バイト
軸/主軸別
名称
参照
PLC から軸/主軸への信号
31, ...
16.0 ~ 16.2
実際のギアステップ
1.17 (S1)
31, ...
21.0 ~ 21.2
パラメータセット選択 A,B,C
1.1 (A2)
31, ...
21.3 ~ 21.4
モータ選択 A,B
1.1 (A2)
31, ...
21.7
パルスイネーブル
1.1 (A2)
31, ...
60.4
基準化/同期化 1
1.16 (R1)
31, ...
60.5
基準化/同期化 2
1.16 (R1)
31, ...
62.5
固定停止点到達
1.7 (F1)
31, ...
92.0
セットアップモードアクティブ
1.1 (A2)
31, ...
92.1
ランプファンクション発生器急停止
1.1 (A2)
31, ...
92.2
トルクリミット 2 アクティブ
1.1 (A2)
31, ...
92.3
速度指令平滑化アクティブ
1.1 (A2)
31, ...
93.0 ~ 93.2
アクティブパラメータセット A,B,C
1.1 (A2)
31, ...
93.3 ~ 93.4
アクティブモータ A,B
1.1 (A2)
31, ...
93.5
DRIVE レディ
1.1 (A2)
31, ...
93.6
積分器 n- コントローラディスエーブル
1.1 (A2)
31, ...
93.7
パルスイネーブル
1.1 (A2)
31, ...
94.0
モータ温度予備警告
1.1 (A2)
31, ...
94.1
ヒートシンク温度予備警告
1.1 (A2)
31, ...
94.2
ランプアッププロシージャ完了
1.1 (A2)
31, ...
94.3
|Md| < Mdx
1.1 (A2)
31, ...
94.4
|nis| < nmin
1.1 (A2)
31, ...
94.5
|nis| < nx
1.1 (A2)
31, ...
94.6
|nis| = nset
1.1 (A2)
31, ...
16.0 ~ 16.2
実際のギアステップ
1.17 (S1)
31, ...
21.0 ~ 21.2
パラメータセット選択 A,B,C
1.1 (A2)
31, ...
21.3 ~ 21.4
モータ選択 A,B
1.1 (A2)
31, ...
21.7
パルスイネーブル
1.1 (A2)
軸/主軸から PLC への信号
1-246
■ マシンデータ
番号
識別子
名称
参照
一般 ($MN_ ... )
11410
SUPPRESS_ALARM_MASK
特別アラームを抑止するためのマスク
11411
ENABLE_ALARM_MASK
特別アラームの起動
11412
ALARM_REACTION_CHAN_N
OREADY
アラームリアクション CHAN_NOREADY 許可
11413
ALARM_PAR_DISPLAY_TEXT
アラームパラメータとしてのテキスト (Siemens Rights)
11420
LEN_PROTOCOL_FILEX
プロトコルファイル用のファイルサイズ (KB)
軸別 ($MA_ ... )
32200
POSCTRL_GAIN[n]
サーボゲイン係数
1.8 (G2)
32250
RATED_OUTVAL
定格出力電圧
1.8 (G2)
32260
RATED_VELO
定格モータ速度
1.8 (G2)
36010
STOP_LIMIT_FINE
イグザクトストップファイン
1.3 (B1)
36030
STANDSTILL_POS_TOL
ゼロ速度範囲
1.2 (A3)
36050
CLAMP_POS_TOL
インタフェース信号 "Clamping active" でのクランプ公差 1.2 (A3)
36210
CTRLOUT_LIMIT
最高速度指令
1.8 (G2)
36300
ENC_FREQ_LIMIT[n]
エンコーダリミット周波数
1.2 (A3)
36400
CONTOUR_TOL
公差帯域輪郭監視
1.2 (A3)
36500
ENC_CHANGE_TOL
位置実際値獲得用の最大公差
1.8 (G2)
37010
FIXED_STOP_TORQUE_DEF
クランプトルク
1.7 (F1)
43510
FIXED_STOP_TORQUE
固定停止点クランプトルク
1.7 (F1)
ドライブマシンデータ ($MD_ ... )
1401
MOTOR_MAX_SPEED
最大可用モータ速度
/IAD/
1417
SPEED_THRESHOLD_X
’nact <nx’ 信号の nx
/IAD/
1418
SPEED_THRESHOLD_MIN
’nact <nmin’ 信号の nmin
/IAD/
1426
SPEED_DES_EQ_ACT_TOL
’nset-nact’ 信号の公差帯域
/IAD/
1428
TORQUE_THRESHOLD_X
スレッショルドトルク
/IAD/
1602
MOTOR_TEMP_WARN_LIMIT
最大モータ温度
/IAD/
1604
LINK_VOLTAGE_WARN_LIMIT
DC リンク不足電圧警告スレッショルド
/IAD/
1620
PROG_SIGNAL_FLAGS
ビット可変信号ファンクション
/IAD/
1621
PROG_SIGNAL_NR
信号番号可変信号ファンクション
/IAD/
1622
PROG_SIGNAL_ADDRESS
アドレス可変信号ファンクション
/IAD/
1623
PROG_SIGNAL_THRESHOLD
スレッショルド可変信号ファンクション
/IAD/
1624
PROG_SIGNAL_HYSTERESIS
ヒステリシス可変信号ファンクション
/IAD/
1625
PROG_SIGNAL_ON_DELAY
ON 遅延可変信号ファンクション
/IAD/
1626
PROG_SIGNAL_OFF_DELAY
OFF 遅延可変信号ファンクション
/IAD/
1700
TERMINAL_STATE
バイナリ入力ステータス
/IAD/
1702
MOTOR_TEMPERATURE
モータ温度
/IAD/
1706
DESIRED_SPEED
速度指令
/IAD/
1707
ACTUAL_SPEED
速度実際値
/IAD/
1708
ACTUAL_CURRENT
平滑化された電流の実際値
/IAD/
1-247
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
1-248
1.6 簡易対話プログラミング(D2)
1.6.1 概略説明
「簡易対話プログラミング」機能を使用すると,次の作成および処理を行うことが
できます。
1. パートプログラム
2. プログラムデータ
統合ヘルプ機能とテストツールがプログラマをサポートします。
このシステムは DIN 66025 に適合した CNC コードの直接入力をサポートし,
外部作成された DIN 66025 プログラムの処理をサポートします。
「簡易対話プログラミング」で作成されたプログラムおよびデータの編集用に
ASCII エディタが含まれています。
ユーザインタフェース,テクノロジパラメータ,および統合ツールカタログを
カスタマイズすることができます。
基本プログラミング手順
プログラムは,8 段階のダイアログレベルの中から 1 つを選んだ後簡易対話スク
リーンフォームにパラメータを入力していくことによって,一連のステップとし
て作成します。
(注)1 つのプログラムステップには ASCII 文字を 20KB まで入れる
ことができます。
1-249
1.6.2 詳細説明
■ 一般事項,アプリケーション
アプリケーション
「簡易対話プログラミング」機能を使用すれば,マシンオペレータは NC プログラ
ミングコードについて詳しく知らなくても,以下を行うことができます。
• パートプログラムの作成
• パートプログラムの編集
• パートプログラムの(実際的な条件下でシュミレートされた加工環境での)テ
スト
提供された状態での「簡易対話プログラミング」機能においては,ダイアログ,
そして特に画面上での加工シミュレーションは下記のマシンを対象にしています。
• 2 軸旋盤(軸 X,Z)
• 下記の加工平面を持つ 3 軸フライス盤(軸 X,Y,Z)
X-Y 平面,Z 方向へのインフィード (G17)
X-Z 平面,Y 方向へのインフィード (G18)
Y-Z 平面,X 方向へのインフィード (G19)
「フリー入力 (free input)」ダイアログレベルにしておけばプログラミングガイドに
記載されている CNC コードのすべての言語要素を,現在のワークのプログラムに
いつでも使用できます。
プログラマが標準ダイアログに含まれていない言語要素(例 座標変換、5 軸工作
機)をよく使う場合は,「ユーザ画面」を構成することによってこれらの言語要素
をダイアログに入れることができます(1.6.2「■ユーザインタフェースの構成」
参照)
。
(注)MMC 102/103 を実行し「簡易対話プログラミング」ファンク
ションを呼込むためには,初期設定 "DPTURN" または
"DPMILL" で予め旋盤かフライス盤を指定しておく必要があり
ます(1.6.2「■フライス加工または旋盤加工の選択」参照)。
参照: YS840DI ユーザーズマニュアル・プログラミング編
ジオメトリモデル
画面上での加工シミュレーションのジオメトリモデルは一般的に,フライス加工
の場合は向きが傾斜していない多面体,旋盤加工の場合は扁心した穴あけ加工や
フライス加工が行われない回転対称体を表すのに適しています。
1-250
プログラムインタプリタ
MMC 102/103 加工シミュレーション機能のプログラムインタプリタは,正しい
データ環境を有する 1 つの NC チャンネルがポーティングされることを前提として
います。
(注)この前提に当てはまらないパートプログラムの構成要素(た
とえば INIT,START,WAIT などのプログラム調整コマンド,
あるいはポーティングされたデータ環境中では構成されない
マシン運動)が使用されている場合は,NC エリア内でのプロ
グラム実行中にはエラーが出力されなくても,シミュレー
ション中にエラー状態になる可能性があります。
バージョン V.3.2 以降のソフトウェアではシミュレーション中
にそのようなプログラム部分をスキップすることができます
(プログラム内でシステム変数 $P_SIM を評価することによっ
て)。スキップしても工作機械上での加工順序に制約が加わる
ことはありません:
PROGRAM_START
:
:
IF $P_SIM GOTOF dest_label
... シミュレーションで実行不可能なプログラム
dest_label:
:
:
PROGRAM_END
プログラムコード
高級言語エクステンションを有する DIN 66025 適合コードだけでなく,「簡易対話
プログラミング」によって生成されるプログラムコードには,プログラムステッ
プの管理に必要な内部構造識別子も入っています。
ASCII エディタ
「簡易対話プログラミング」を使用して作成したプログラムは,「簡易対話プログ
ラミング」の前提を守って編集するか,あるいは数値だけを変更して内部プログ
ラム構造は変更しないことを条件として,ASCII エディタを使用して変更するよう
にしてください。
ASCII エディタと「簡易対話プログラミング」は同一のデータ管理システムを使用
していれば互換性があります。
その他のプログラミングツール
その他の(外部)プログラミングツールを使用して変更されたプログラムでも,
内部プログラミング構造を損なわないようにすれば,「簡易対話プログラミング」
を使用してさらに編集することができます。
1-251
一般条件
「簡易対話プログラミング」機能は PCU50 内に実装されています。
制限事項
1. 標準バージョンの「簡易対話プログラミング」は,フライス盤加工,ボール盤
加工,および旋盤加工作業の 80% をカバーしています。
2. 必要に応じていつでも特殊操作機能を追加設定できます。
3. 機能 G33 (ねじ切り加工)とともに使用される言語インストラクションは,
バージョン 3.2 以降を使用して行われる加工シミュレーションでは正確に実行
されます。
1-252
■ ユーザインタフェースの構成
ヘルプ画面の設定
インフォメーション (Information) キーを使ってヘルプ画面を選択し,マウスを
使って図の任意の部分をダブルクリックした後,Windows 3.x プラットフォームか
ら PAINTBRUSH グラフィックエディタを使って既存のグラフィックを編集または
新規作成することができます。
変更を保存すると,次回ヘルプ画面を呼び出したときに編集されたグラフィック
が表示されます。
ヘルプテキスト用のカーソルは常にテキスト入力フィ-ルドで入力待ちの状態に
なっています。
デフォルトのヘルプテキストには関連ウィンドウの名称が含まれていて,ユーザ
拡張(ユーザノートパッド)とともに保存されます。
テキストフィールドからスペースを含むすべての文字を消すと初期設定が再度呼
出されます。
ベーシックインフォの適用
ダイアログレベルで使うベーシックインフォメーションのグラフィックおよびテ
キストはマウスでグラフィック部分またはヘッダをダブルクリックすれば,同じ
方法で別々に編集できます。
ユーザ画面の作成
ユーザは下記の 5 段階のダイアログレベル(水平ソフトキー)用に自分のリスト
画面を作成することができます。作成したら,垂直ソフトキー「ユーザ」を使っ
て,ダイアログレベルに応じたリスト画面を呼出すことができます。
1. プログラムセクション
2. パス輪郭
3. 連続パス制御
4. ツールおよび材料
5. 処理
リスト画面は下記のメニューパスで作成されます。
"Display Mode/User Displays"
参照: YS840DI ユーザーズマニュアル・操作編
必要なパラメータを入力すると,標準サイクルダイアログと同様の方法で,ユー
ザ別プログラム(たとえば cycles)を呼出すことができます。
ユーザ画面(たとえば,マシン変換のために必要な言語要素生成用のユーザ画面)
用のパラメータから CNC コードを直接生成することもできます。
1-253
最初は空のヘルプ画面が各ユーザ画面に自動的に割り当てられます。
(注)・グラフィックの設定にはマウスが必要です。
・ヘルプ画面用のグラフィックデータは必ずシステム ( C:\dh\dp.dir\hlp.dir* )
にビットマップフォーマット (*.bmp) で保存してください。
・PAINTBRUSH 処理 "Edit/Insert From..." を行った後は,変更したグラフィッ
クファイルを保存する前に ("Save File As"...),ターゲットディレクトリがシ
ステムのパスと一致していることを確認してください。
・ユーザインタフェースの設定は一般マルチレベルアクセス保護を受けてい
ます。設定処理を行う前にパスワードを設定してください。
1-254
■ テクノロジメモリの設定
テクノロジメモリの構造
"Material\Cutting Material\Machining Quality\Machining Type" というアクセスキーそ
れぞれについて,テクノロジデータブロック(経験値)を 1 個保存できます。1 個
のテクノロジデータブロックは最大 10 個のパラメータを持つことができます。
材料メモリ
「簡易対話プログラミング」で使用する材料はテクノロジメモリで使用する前に定
義しておく必要があります。該当するデータを下記のメニューパスに入力し,保
存することができます。
"Tools and Material\Enter Material"
カッター材料メモリ
使用可能なツールのカッター材料は,「簡易対話プログラミング」で使用する前
に,下記のメニューパスに保存しておかなければなりません。
"Tools and Material\Enter Cutting Material"
技術的推奨値
各アクセスキーについて,下記のメニューパス中に,デフォルト値を技術的推奨
値に割当てることができます。
"Tools and Material\Enter Technology"
技術的推奨値は「簡易対話プログラミング」で計算して得た値ではなく,マシン
メーカあるいはエンドユーザの経験値です。
使用する加工タイプとツールに応じて,適切な技術的推奨値を呼出すことによっ
て,依存するダイアログ画面(パス画面およびサイクル画面)を初期化すること
ができます。
(注) ・テクノロジデータは編集できません。削除してから入力し直してください。
・ワークピースおよびカッティング材料は「シーケンス番号 (Sequence No.)」
でのみ管理します。
・
「クラス (Classes)」および「キーワード (Keywords)」は言葉上の識別基準
のため,ソートには使用できません。
・標準ダイアログの場合は,ユーザ画面の設定時にパラメータを最大 10 個
までテクノロジメモリにリンクすることができます。
・バージョン SW 3.2 以降のソフトウェアではテクノロジメモリは一般アク
セス保護されます。
1-255
■ ツールカタログの作成
ツールカタログの構造
各ツールについて原則として下記の 2 組のデータが使用できます。
1. ツールマスタデータ
2. ツールオペレーションデータ
これらはカスタマイズすることができます。
ツールマスタデータ
" ツールマスタデータ”には下記のデータが含まれています。
• ツールの空間およびキネマティクス用のデータ
• TOA データにマッピングすることができるデータのサブセット
ツールオペレーションデータ
“ツールオペレーションデータ”は下記のツール交換に関するデータです。
• ツールコール時にアクティブになっている切削刃
• テクノロジアクセス用のツールのカッター材料
• マガジン中のツール位置番号
• 半径補償の予備選択
• 主軸動作の予備選択
ツ-ルオペレーションデータは,
(ツールカタログで使用できるように)テクノロ
ジメモリ内の推奨値と同じ方法で,ツール交換画面上で初期化することができま
す。
ツールカタログの作成
ツールカタログの作成ために,ツールカタログに含めるツールマスタデータと
ツールオペレーションデータのカスタマイズのために,次のメニューパス中の基
準ツールが使用できます。
"Tools and Material\Enter tool"
ツールカタログの使用
メニューパス "Tools and Material\Tool Change" において,ツールカタログからツー
ルを選択すると,自動的にツール交換画面が初期化され,前回使用したツールオ
ペレーションデータが表示されます。
(注)・納入時には,ツールカタログには基準ツールのマスタデータしか入ってい
ません。
・
(オプションの)ツール管理システムを使用する場合は,同じデータベース
を使うことでツールカタログのマスタデータとツール管理システムのデー
タとが一致します。
・バージョン SW 3.2 以降のソフトウェアにおいては,ツールがツールカタロ
グから呼出された時に,ツールマスタデータへの加工シミュレーションア
クセスが初期化されます。
1-256
■ 簡易対話プログラミングの設定
MMC 102/103 上で簡易対話プログラミングを設定する場合は下記の手順に従って
ください。
1. フライス加工または旋盤加工を選択する。
2. 軸識別子の最適化設定。
3. SW 3.1 まであるいは SW 3.2 以降でのシミュレーションデータの設定。
4. シミュレーションデータを最適化するための特別条件
■ フライス加工または旋盤加工の選択
少なくとも manufacturer パスワードがアクティブであると想定して,マシン製造業
者およびユーザは簡易対話プログラミングを旋盤またはフライス盤に割当てるた
めに下記の作業を行うことができます。
オペレータが行う作業
ユーザエリアキーを押します。
Startup
スタートアップモードに切換えます。
MMC
"MMC" ソフトキーを押します。
Editor
"Editor" キーを押します。
Load
"Load" キーを押します。とファイル一覧が表示されます。
End
"End" キーを 2 回押します。ファイル選択ウィンドウが呼出されます。
End
方向方向キーで "C:\MMC2" 内の "REGIE.INI" ファイルを選択します。
OK
"OK " キーを押してそのファイルを開きます。
“Task Configuration(タスク構成)”セクションの下に下記が表示されます。
Task2=name:=dpmill, ... ( フライス加工用 )
;Task2=name:=dpturn, ... ( 旋盤加工用 )
1-257
起動させない方のタスクの前にセミコロン (;) をつけ,起動させる方のタスクの前
のセミコロン (;) を削除します(この例では,フライス加工バージョンを起動させ
る設定になっています)。
Save
変更したファイルを保存します。
"Recall" キーを押してスタートアップモードに戻ります。
MMC 102/103 を再起動すると希望する加工に「簡易対話プログラミング」が割当
てられます。
(注)納入時にはフライス加工バージョンを起動する設定になってい
ます。バージョン SW 3.2 以降のソフトウェアにおいては,フ
ライス加工バージョンのタスク名は ( "DPMILL" の代わり
に)"DP" になっています。
■ 軸名のカスタマイズ
「簡易対話プログラミング」は軸識別子はジオメトリ軸,関連のあるマシン軸およ
び補間軸に自由に設定できます。
CNC コード生成と CNC コード分析(ステップ変更)の両方に定義された軸識別子
が含まれています。
(注)自動マッチングは行われません。
生成された CNC コードがターゲットマシン( NCK またはシミュレーションイン
タプリタ)上で確実に実行可能にするため,「簡易対話プログラミング」の軸識別
子を下記の手順で実際の軸識別子( NCK マシンデータ)と一致させる必要があり
ます。
オペレータが行う作業
プログラムを開いた後で,
"Display Mode"(ディスプレイモード)ダイアログレベルを選択します。
Display
Mode
"Default Settings"(デフォルト設定)ダイアログ画面を立上げます。
Default
Settings
"Page Down " キーを使って画面の 2 ページ目を選択します。
1-258
ここで軸識別子を希望とおりに設定することができます。
OK
"OK" キーを押し,設定を保存します。
そしてこの時点以降,設定は現在のワークピースに対する CNC コード生成に含ま
れます。
(注)バージョン SW 3.2 以降のソフトウェアでは,新しく扱うすべ
てのワークについてこの設定を使用できます(プロンプト
ウィンドウ)。
■ SW 3.1 までのシミュレーションデータの最適化
1.6.2「■一般事項 , アプリケーション」ですでに述べたように,MMC 102/103 上
での加工シミュレーションは個別のマシンデータを使って疑似チャンネルで実行
できます。
「簡易対話プログラミング」で使用するマシンデータは,標準パートプログラム上
で実際的でエラーのないシミュレーションが行われるよう,実際的なマシンデー
タと一致させる必要があります。
バージョン SW 3.1 では(チャンネル調整コマンドのような)変換できないプログ
ラム列をとばすことはできず,シミュレーションインタプリタがアラームメッ
セージを出力します。
バージョン SW 3.1 までのソフトウェア(バージョン SW 3.1 も含む)のデータの概
要は次のとおりです。
シミュレー
ション
INITIAL.INI
DPSIM.TA
(リアル MD)
( シミュレーション MD)
NC- アクティブデータ
ディレクトリ:C:\MMC2\DP
データを一致させる
図 1.49 バージョン SW 3.1 までのソフトウェア(バージョン SW 3.1 も含む)の
データの概要
1-259
納入時には DPSIM.TEA 内のシミュレーションデータはフライス加工バージョンに
合わせています。
「旋盤加工 (turning)」バージョンに合わせたい場合は,このファイルを開いて旋盤
加工への変更( X-Z 運動,加工面 G18 ,直径プログラミングなど)を行ってくだ
さい。
標準構成の場合は,下記の旋盤加工マシンデータのセミコロンを削除するだけで
す。
$MC_GCODE_RESET_VALUES[5]=2 ;BH from turn.md ... G18
:
:
$MC_GCODE_RESET_VALUES[28]=2 ;BH from turn.md diamprog (DIAMON)
(注)DPSIM.TEA ファイル中のシミュレーションマシンデータの変
更について,NCK マシンデータの設定に適用される条件と同
じ条件を守らなければなりません。下記を参照してください。
参照: YS840DI API 取扱説明書
図 1.50 のフローチャートはバージョン SW 3.1 までのソフトウェア(バージョン
SW 3.1 も含む)のマシンデータを一致させるための手順を示しています。
1-260
シミュレーション起動前
DPSIM.TEA
納入時の状態
「フライス加工」
XYZ キネマティックス
マシン製造業者:
設定をリセットするために必要に応
じて個々に調整する。
加工手法
フライス加工
旋盤加工
DPSIM.TEA
「旋盤加工テクノロジ」
の設定
XZ キネマティックス
標準
(X、Y、Z あるいは X、Z)
INITIAL.INI
NCK
マシン製造業者:
少なくとも G コードリセット設定
(G18,DIAMON) を設定する。
注意!
G95を起動させるときは、標準キネマ
ティックスデータを設定しなければな
らない。
マシンキネマ
ティックス?
特殊
(回転軸など)
シーメンスの技術者:
DPSIM.TEA
シュミレーションチャンネルのマシン
データと NCK スタートアップデータと
マシンキネマティック
を個々に一致させる(1.6.2の特別条件
スの設定
を満足すること)。
MMC
Created with Visio
マッチング終了
図 1.50 バージョン SW 3.1 までのソフトウェア(バージョン SW 3.1 も含む)のマ
シンデータを一致させるための手順
1-261
オペレータの作業
オペレータがファイル DPSIM.TEA を設定するときの作業は次のとおりです。
(注)ファイル DPSIM.TEA を設定する前に,フルコンピュータキー
ボードを MMC 102/103 のキーボードインターフェース(丸形
コネクタ)に接続して manufacturer 用 パスワードを登録しな
ければなりません。
ユーザエリアキーを押します。
Startup
MMC
DOS Shell
"Startup"(スタートアップ)モードに切換えます。
"MMC" ソフトキーを押します。
"DOS Shell" キーを押します。
ここで DOS レベルでカレントディレクトリ C:\MMC2> になります。
CD DP
DOS コマンド "CD DP" を入力して DP サブディレクトリ C:\MMC2\DP> に移って
ください。
EDIT DPSIM.TEA
ここで,DOS エディタを使って編集を行うためにファイル DPSIM.TEA を開きま
す。
方向キーを使って,変更したい場所へテキストカーソルを動かし,変更を加えま
す。
変更したら,フルコンピュータキーボードの "Alt" キーを押してトップメニューラ
イン "File" を呼出します(米国ウィンドウズバージョンの場合)。
方向キーを使って "File" メニューを開き,"X" キーを押してエディタを閉じます。
または
変更を行っていれば "Yes" と答えます。
DOS コマンド "EXIT" を入力してスタートアップモードに戻ります。
1-262
DPSIM.TEA ファイルの変更されたデータは,次のシミュレーション起動時に有効
になります。
(注) ・MMC 102/103 のソフトウェアバージョン V 3.1 では,メニューパス
STATUP\MMC\... にあるファイル DPSIM.TEA をエティタを使って(ファ
イルが大きすぎるため)開くことはできません。
・弊社の技術者が DPSIM.TEA ファイルを個別にマッチングさせる場合はな
るべく外部の PC/PG で下記のように行ってください。
- ファイル DPSIM.TEA をまず初期化プログラム INITIAL.INI で上書きします。次
に特定の条件(1.6.2「■シミュレーションデータの設定に関する特定条件」参
照。
)によって影響を受けるデータを探しだして適当な状態に変更します。
- 変更された DPSIM.TEA は、その後パス C:\MMC2\DP にコピーされる。
・初期化プログラム INITIAL.INI. はスタートアップマシンデータに加え,
いろいろなユーザパラメータ(R パラメータ,設定可能フレーム,ツール
オフセットなど)に対する基本設定を有しています。これらの基本設定は
シミュレーションには含まれていません。
■ SW 3.2 以降を使用したシミュレーションデータの設定
バージョン SW 3.2 以降では,再構成されてはいるものの独立したマシンデータを
加工シミュレーションを行う場合に,実行するために疑似チャンネルも使用しま
す。
フライス加工用および旋盤加工用基本データ設定も完成しています。
1-263
シミュレー
ション
INITIAL.INI
DPSIM.TA
(実 MD)
( シミュレーション MD)
NC- アクティブデータ or
or
or
コピー
INITIAL.INI
DPSIM_M.TEA
DPSIM_T.TEA
(実 MD のコピー)
( 基本「フライス
( 基本「旋盤加工」
加工」データ)
データ)
図 1.51 バージョン SW 3.2 以降のデータの概要
ソフトウェア SW 3.2 以降において設定作業を容易にするため,シミュレーション
マシンデータが C:\MMC2\DP ディレクトリの下記の 2 組のデータの基本セットに
すでに含まれています。
• DPSIM_T.TEA(旋盤用)
• DPSIM_M.TEA(フライス用)
(実スタートアップデータが ...\SIM.DIR ディレクトリに INITIAL.INI ファイルの形
で入っていない場合)選択された加工テクノロジに従って,有効なデータが加工
シミュレーションに自動的に割当てられます(1.6.2「■フライス加工または旋盤
加工の選択」参照。
)。
それ以外の場合は INITIAL.INI ファイルが自動的に割当てられます。
最後に,1.6.2「■シミュレーションデータの設定に関する特定条件」で述べられ
ている特定の条件に合わせることができるようにするためにシミュレーション用
マシンデータが入っているファイル DPSIM.TEA が使用されます。
1-264
シミュレーション起動前
INITIAL.INI
NCK
INITIAL.INI
ディレクトリ ..
\DP.DIR\SIM.DIR の実
MDのコピー
マシン製造業者:
・必要であれば(たとえば特定軸識別子または
加工変換)、MD コピー INITIAL.INI を作成
してください(次ページ参照)。
MMC
シミュレーション起動
はい
INITIAL.INI
ファイルが ..
DP.DIR\SIM.DIR ディレクト
リに入っているか?
いいえ
旋盤
加工テクノロジ?
フライス
INITIAL.INI
実 MD、キネマティック
ス
DPSIM_M.TEA
基本フライス加工データ
X、Y、Z、A、B キネマ
ティックス
SPDIM.TEA
シュミレーション別マシ
ンデータ
DSPIM_T.TEA
基本旋盤加工データ
X、Z、C キネマティック
ス
加工シュミレーショ
ンへの自動割当て
1.6.2■「シミュレーションデータの設定に関
する特定条件」で述べられている特定の条件
に合った自動設定が完了すると起動します。
MMC
Created with Visio
マッチング終了
図 1.52 ソフトウェアバージョン SW 3.2 以降のマシンデータをマッチングさせるた
めの半自動手順
1-265
オペレータの作業
オペレータがシミュレーションディレクトリにファイル INITIAL.INI を作成するた
めの作業は下記のとおりです。
シミュレーションデータを実マシンデータと一致させるために,マシンデータを
含めたアクティブ初期化データを簡易対話プログラミングシステムのシミュレー
ションディレクトリに直接コピーします(製造業者パスワードを正確に入力して
ください)。
ユーザエリアキーを押します。
Services
Data
Selection
"Services"(サービス)モードに切換えます。
"Data Selection"(データ選択)ファンクションエリアを起動します。
方向キーを使ってデータディレクトリ "NC-active data" にカーソルを合わせます。
選択キーを使ってデータを選択します。
OK
オペレーションが正しく行われていれば "OK" キーを押し,"Program/Data " 概要に
戻ります。
入力キーを押して "NC-active data" ディレクトリを開きます。
次に,方向キーを使ってファイル "INITIALIZATION PROGRAM (INI)" を選択しま
す。
Data
Management
Copy
ここで "Data Management"(データ管理)ファンクションエリアに切換え,
"Copy"(コピー)ファンクションを選択します。
方向キーと入力キーを使って目的のディレクトリである "Interactive Programming/
Simulation Data" にカーソルを合わせます。
"Insert"(挿入)ソフトキーを押します。
Insert
コピーオペレーションが開始され,シミュレーションディレクトリにファイル
INITIAL.INI が作成されます。
次にシミュレーションを起動した時にも実マシンデータは消えずに残っています。
1-266
■ シミュレーションデータの設定に関する特定条件
SW 3.1 までのソフトウェア(SW 3.1 も含む)の二次的条件
NCK スタートアップガイドに反して,ファイル DPSIM.TEA のシミュレーション
チャンネルマシンデータを個別に設定するためにジオメトリ軸をチャンネル軸に
自由に割当てることはできません。シミュレーションインタプリタは常に決まっ
た割当てしかできません。
第 1 ジオメトリ軸→第 1 チャンネル軸または割当て無し
第 2 ジオメトリ軸→第 2 チャンネル軸または割当て無し
第 3 ジオメトリ軸→第 3 チャンネル軸または割当て無し
従って,DPSIM.TEA ファイル中の対応するマシンデータは次の値しかとれませ
ん。
$MC_AXCONF_GEOAX_ASSIGN_TAB[0]=1 or 0
$MC_AXCONF_GEOAX_ASSIGN_TAB[1]=2 or 0
$MC_AXCONF_GEOAX_ASSIGN_TAB[2]=3 or 0
下記の設定例はこのことを説明したものです。
ジオメトリ軸以外のチャンネル軸への割当ては上記のように行ってください。
(注)SW 3.2 以降には上記の制限はありません。
設定例
;
; SW3.1-Machine data excerpt for adaptation
; of the axis configuration for machining simulation
; on a turning machine (intended only as an example!)
; 2 geometry axes (X, Z) ==> 1st and 2nd machine axes
: 1 spindle (C, rotary axis) ==> 4th machine axes
; 1 auxiliary axis (Q, linear axis) ==> 3rd machine axes
;
CHANDATA(1)
$MN_AXCONF_MACHAX_NAME_TAB[0]=”X1”
$MN_AXCONF_MACHAX_NAME_TAB[1]=”Z1”
$MN_AXCONF_MACHAX_NAME_TAB[2]=”Q1”
$MN_AXCONF_MACHAX_NAME_TAB[3]=”C1”
$MN_AXCONF_MACHAX_NAME_TAB[4]=”A1”
$MN_AXCONF_MACHAX_NAME_TAB[5]=”Y1”
$MN_AXCONF_MACHAX_NAME_TAB[6]=”U1”
$MN_AXCONF_MACHAX_NAME_TAB[7]=”V1”
CHANDATA(1)
$MC_CHAN_NAME="CHAN1"385e
$MC_AXCONF_GEOAX_ASSIGN_TAB[0]=1
$MC_AXCONF_GEOAX_ASSIGN_TAB[1]=0
$MC_AXCONF_GEOAX_ASSIGN_TAB[2]=3
$MC_AXCONF_GEOAX_NAME_TAB[0]=”X”
$MC_AXCONF_GEOAX_NAME_TAB[1]=”Y”
1-267
$MC_AXCONF_GEOAX_NAME_TAB[2]=“Z”
$MC_AXCONF_MACHAX_USED[0]=1
$MC_AXCONF_MACHAX_USED[1]=4
$MC_AXCONF_MACHAX_USED[2]=2
$MC_AXCONF_MACHAX_USED[3]=3
$MC_AXCONF_MACHAX_USED[4]=0
$MC_AXCONF_MACHAX_USED[5]=0
$MC_AXCONF_MACHAX_USED[6]=0
$MC_AXCONF_MACHAX_USED[7]=0
$MC_AXCONF_CHANAX_NAME_TAB[0]=“ ”
$MC_AXCONF_CHANAX_NAME_TAB[1]=“ C”
$MC_AXCONF_CHANAX_NAME_TAB[2]=“ ”
$MC_AXCONF_CHANAX_NAME_TAB[3]=“Q”
$MC_AXCONF_CHANAX_NAME_TAB[4]=“A”
$MC_AXCONF_CHANAX_NAME_TAB[5]=“Y”
$MC_AXCONF_CHANAX_NAME_TAB[6]=“U”
$MC_AXCONF_CHANAX_NAME_TAB[7]=“V”
:
$MA_SPIND_ASSIGN_TO_MACHAX[AX4]=1
:
M30
SW 3.1 および SW 3.2 に関するその他の条件
加工シミュレーションのオペレーションをエラーなく行うためには,シミュレー
ションチャンネルの特定のマシンデータは定義された状態(シミュレーション状
態)になっていなければなりません。定義された状態とは対応する NCK マシン
データの実際の状態とは異なっています。
- バージョン SW 3.1 ではマシンデータはファイル DPSIM.TEA 中でこの状
態になるように明示的に設定しなければなりません(1.6.2「■ SW 3.1 ま
でのシミュレーションデータの最適化」参照)。
- バージョン SW 3.2 以降では,マシンデータは起動時からファイル
DPSIM.TEA(最後に起動するファイル)に含まれているのでデータは自
動的に設定されます。
SW 3.2 で使用されるファイル DPSIM.TEA を以下 3 ページにわたって示します。
1-268
DPSIM.TEA ファイル
; This dpsim.tea serves as a supplement to machine data input,
;in order to adapt any inapproriate setting for simulation
;made by the user-INITIAL.INI.
;
;
CHANDATA (1)
; No referencing for required for NC start )
$MC_REFP_NC_START_LOCK=0
; Deactivate PLC time out monitoring )
$MN_PLC_RUNNINGUP_TIMEOUT=10.
$MN_PLC_CYCLIC_TIMEOUT=10.
;Memory configuration )
MN_MM_USER_MEM_DYNAMIC=5000
; Override to respond digitally )
$MN_OVR_FEED_IS_GRAY_CODE=0
$MN_OVR_RAPID_IS_GRAY_CODE=0
$MN_OVR_AX_IS_GRAY_CODE=0
$MN_OVR_SPIND_IS_GRAY_CODE=0
; No611D drive required )
$MN_DRIVE_IS_ACTIVE[0]=0
$MN_DRIVE_IS_ACTIVE[1]=0
$MN_DRIVE_IS_ACTIVE[2]=0
$MN_DRIVE_IS_ACTIVE[3]=0
$MN_DRIVE_IS_ACTIVE[4]=0
$MN_DRIVE_IS_ACTIVE[5]=0
$MN_DRIVE_IS_ACTIVE[6]=0
$MN_DRIVE_IS_ACTIVE[7]=0
$MN_DRIVE_IS_ACTIVE[8]=0
; Position measurement system simulated )
$MA_ENC_TYPE[0,AX1]=0
$MA_ENC_TYPE[1,AX1]=0
$MA_ENC_TYPE[0,AX2]=0
$MA_ENC_TYPE[1,AX2]=0
$MA_ENC_TYPE[0,AX3]=0
$MA_ENC_TYPE[1,AX3]=0
$MA_ENC_TYPE[0,AX4]=0
$MA_ENC_TYPE[1,AX4]=0
$MA_ENC_TYPE[0,AX5]=0
$MA_ENC_TYPE[1,AX5]=0
$MA_ENC_TYPE[0,AX6]=0
$MA_ENC_TYPE[1,AX6]=0
$MA_ENC_TYPE[0,AX7]=0
$MA_ENC_TYPE[1,AX7]=0
1-269
$MA_ENC_TYPE[0,AX8]=0
$MA_ENC_TYPE[1,AX8]=0
; Setpoint output simulated )
$MA_CTRLOUT_TYPE[0,AX1]=0
$MA_CTRLOUT_TYPE[0,AX2]=0
$MA_CTRLOUT_TYPE[0,AX3]=0
$MA_CTRLOUT_TYPE[0,AX4]=0
$MA_CTRLOUT_TYPE[0,AX5]=0
$MA_CTRLOUT_TYPE[0,AX6]=0
$MA_CTRLOUT_TYPE[0,AX7]=0
$MA_CTRLOUT_TYPE[0,AX8]=0
; Axis output signals to PLC even for simulated axes )
$MA_SIMU_AX_VDI_OUTPUT[AX1]=1
$MA_SIMU_AX_VDI_OUTPUT[AX2]=1
$MA_SIMU_AX_VDI_OUTPUT[AX3]=1
$MA_SIMU_AX_VDI_OUTPUT[AX4]=1
$MA_SIMU_AX_VDI_OUTPUT[AX5]=1
$MA_SIMU_AX_VDI_OUTPUT[AX6]=1
$MA_SIMU_AX_VDI_OUTPUT[AX7]=1
$MA_SIMU_AX_VDI_OUTPUT[AX8]=1
; The IPO cycle is adjusted to match the servo cycle )
; therefore $MA_FIPO_TYPE[AXn]=1 not required for SIM
$MN_IPO_SYSCLOCK_TIME_RATIO=1
; The only one allowed, and even the default value is not set separately )
$MN_POSCTRL_SYSCLOCK_TIME_RATIO=1
; Deactivate spindle states for IPO start )
$MA_SPIND_ON_SPEED_AT_IPO_START[AX1]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX1]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX2]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX2]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX3]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX3]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX4]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX4]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX5]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX5]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX6]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX6]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX7]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[AX7]=FALSE
$MA_SPIND_ON_SPEED_AT_IPO_START[AX8]=FALSE
$MA_SPIND_STOPPED_AT_IPO_START[A8]=FALSE
1-270
; Simulation without gearbox switchover (requires PLC acknowledgment!) )
$MA_GEAR_STEP_CHANGE_ENABLE[AX1]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX2]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX3]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX4]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX5]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX6]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX7]=0
$MA_GEAR_STEP_CHANGE_ENABLE[AX8]=0
; Enable all options for simulation: )
$ON_NC_CODE_CONF_NAME_TAB[0]=“”
$ON_NC_CODE_CONF_NAME_TAB[2]=“”
$ON_NC_CODE_CONF_NAME_TAB[4]=“”
$ON_NC_CODE_CONF_NAME_TAB[6]=“”
$ON_NC_CODE_CONF_NAME_TAB[8]=“”
$ON_NC_CODE_CONF_NAME_TAB[10]=“”
$ON_NC_CODE_CONF_NAME_TAB[12]=“”
$ON_NC_CODE_CONF_NAME_TAB[14]=“”
$ON_NC_CODE_CONF_NAME_TAB[16]=“”
$ON_NC_CODE_CONF_NAME_TAB[18]=“”
$ON_NC_CODE_CONF_NAME_TAB[20]=“”
$ON_NC_CODE_CONF_NAME_TAB[22]=“”
$ON_NC_CODE_CONF_NAME_TAB[24]=“”
$ON_NC_CODE_CONF_NAME_TAB[26]=“”
$ON_NC_CODE_CONF_NAME_TAB[28]=“”
; ASPLINE
; BSPLINE
; CSPLINE
; COMPON
; POLY
; REPOSL
; REPOSQ
; REPOSH
; COUPON
; TANGON
; FTOCON
; CUT3DC
; CUT3DF
;
;
;
; The following screens are initially enabled directly as values!!! )
;
;
; delete active tool on reset )
; since only Bit1 is enabled, TOOL_RESET_VALUE is evaluated (default 0))
$MC_RESET_MODE_MASK=1
; Simulation of PLC acknowledgments on tool motion and tool change active )
;This bit is only used for testing purposes. It is used to test )
; the data transport on NCK and MMC
$MC_TOOL_MANAGEMENT_MASK=’H0200’
;
; CAUTION: no empty lines after M30! )
M30
1-271
■ ツールオフセットデータの設定
加工シミュレーションのツールを表わすための基本オプションには下記のような
ものがあります。
1. シミュレーションするプログラムのワークピースディレクトリに TOA ファイ
ルを作成します。
2. シミュレーションプログラムから TOA データが含まれたサブプログラムを呼
出します。
3. シミュレーションするプログラムの先頭に TOA データを直接挿入します。
4. SW 3.2 以降では,ツールカタログからのツールデータを使ってツールを表わ
すこともできます。
加工シミュレーションの実オフセット値でツールを表わすことができるようにす
るために,シミュレーションのアクティブツールデータは予め NC アクティブデー
タからのツールデータと一致させておかなければなりません。
このことは,NC アクティブデータから必要とするツールデータをコピーして,そ
のデータをシミュレーションに含まれている,前もってアドレスされた TOA デー
タエリアのうちの 1 つに挿入することで行えます。
(注)・ツールシャンクまたはカッティングエッジの正確なジオメトリについての
情報を TOA パラメータから引出すことはできません。
・シミュレーションは上記の目的で標準デフォルト値を使用します。これら
の値は使用されるツールの実際の寸法と合っていないことがあります。こ
の場合には,加工シミュレーション中に誤って衝突表示がでることがあり
ます。
・正確な寸法は,SW 3.2 以降でツールカタログを含めることによってしか参
照できません。
オペレータの作業
NC アクティブツールデータを間接的にコピーするための操作手順は次のように行
います。SW 3.1 と SW 3.2 の操作手順は同一です。
Services
ユーザエリアキーを押します。
Data
Selection
"Services"(サービス)モードに切換えます。
"Data Selection"(データ選択)ファンクションエリアを起動します。
方向キーを使ってディレクトリ "NC-active data" にカーソルを合わせます。
OK
選択キーを使ってデータを選択します。
オペレーションが正しく行われていれば "OK" キーを押します。
1-272
"Programs/Data" 概要で,入力キーを押してディレクトリ "NC-active data" を開き,
方向キーを使ってディレクトリ "tool/magazine data" に移動します。
このディレクトリ ("tool/magazine data") も開きます。
ここでディレクトリ "tool offsets" を選択します。
このディレクトリ ("tool offsets") を開きます。
方向キーを使ってディレクトリ "tool offsets-complete INI" に移動します。
クリップボードを介してこのファイルの内容をコピーするために,入力キーを
使ってこのファイルを開きます。
Highlight
このファイルの中の必要な内容を選択します。
選択した内容をクリップボードにコピーします。
Copy
New
この時点で,クリップボードにコピーした内容を,シミュレーションに含まれて
いる TOA データエリアのうちの 1 つの中に ASCII エディタを使って挿入すること
ができます。
たとえば,「簡易対話プログラミング」に ".TOA" タイプのファイルを新規作成し
て,この作成した TOA ファイルにクリップボードの内容を挿入できます。
SW 3.2 以降の「簡易対話プログラミング」
• ワークピース専用の TOA ファイルまたは TOA サブプログラムは,クリップ
ボードを使わなくても,直接 "Tool offsets-complete" (コピー元)から
"workpieces"(コピー先)にコピーすれば作成できます。そこから,たとえば
グローバルサブプログラムを得ることができます。
• 目的のエリアに入れた,コピーして作成したファイルが正しいタイプ(TOA
あるいは SPF)であるか確認し,正しくなければリネームしてください。
• 以上のことをすれば,加工シミュレーションでいつでも実際の刃物台またはマ
ガジンのローディングを行うことができます。
(注)ファイル取扱いの詳細な説明については「YS840DI ユー
ザーズマニュアル・操作編」の第 6 章「サービスユーザエ
リア」を参照してください。
参照: YS840DI ユーザーズマニュアル・操作編
1-273
■ SW 3.6 以降を使用した変更
a) レイアウトの変更
基本情報およびヘルプ
• 基本情報の内容は簡略化されて以下のようになりました。
基本情報が表示されると,その時アクティブになっている保護レベルが読みと
られます。テキストの上方部分は常に表示されますが,下方部分(設定オプ
ションに関する情報)は選択された保護レベルが「ユーザパスワード」以上で
ある場合にのみ表示されます。
• 画面フォーム用のスクラッチパッドテキストに画面フォームと同じ見出しがな
い場合は,画面フォームとともにヘルプが表示されます(同じ見出しがなかっ
たら,まず i キーを押してください)。本来,基本情報は,「簡易対話プログラ
ミング」ファンクションをサイクル画面,ユーザ画面,およびツールマスタ
データのために使用します。しかし,ユーザはそれをあらゆる画面フォームに
適用することができます。
フリー入力
• フリー入力用の画面フォームは全画面表示になりました。
• 「フリー入力 (Free inputs)」タイプの新しいステップを作成して「ブロックナン
バリング (block numbering)」を選択する場合は,画面フォームにブロック番号
を入れます。
輪郭
• 輪郭画面はメニューから選択できなくなりました。輪郭コンピュータのみが輪
郭画面を使用できます。
• 輪郭画面は全画面表示になりました。
• 「ジオメトリ設定 (Setting geometry)」ソフトキーは「ディスプレイモード
(Display mode)」の基本メニューからなくなりました。輪郭コンピュータがア
クティブのときに「ディスプレイモード」レベルにすると輪郭画面が表示され
ます。
シミュレーション
• シミュレーション画面は全画面表示になりました。
• 「シミュレーション設定 (Setting simulation)」ソフトキーは「ディスプレイモー
ド」用基本メニューからシミュレーション用基本メニューへ移動しました。
"Blank + Option" を押すとシミュレーション画面が表示されます。
プログラム画面
• 「予備設定 (Presettings)」画面フォームには補助画面エリア(以前はプログラム
+ 形状,プログラム + シミュレーション)はなくなりました。
• 「ディスプレイモード」用基本メニューの "Setting Program" ソフトキーは
"Change represent" ソフトキーに変わりました。"Step" と "Code" を切換えるとプ
ログラム画面が表示されます。
1-274
プログラム識別子画面フォーム
プログラムタイプ画面はなくなりました。
ツールチェンジ画面フォーム
• 次のコール時には最後に選択した変更モードになっています。
• ツールチェンジプログラム名とツール名は別々の欄に入力するようになりまし
た。ツール管理ファンクションを使ってステップの中のツールチェンジプログ
ラム呼出しオプションを使用できるようになりました。
• 画面フォーム内でプログラミングレベルの設定もできるようになりました。
b) 新しいファンクション
1. 下記のことを行って INI ファイルのテクノロジメモリを停止できます。
C:\MMC2\dpmill.ini / dpturn.ini へ新たに下記の入力を行います(変数は立上が
り時にのみ読込まれます)。
[ACCESSLEVEL]
USE_TECHNO=7
USE_ TECHNO=0 と入力するとテクノロジサポートファンクションの切換えを
行うことができます。カッティングエッジ/材料選択およびカッティングエッ
ジ/材料エティタは使用できません。
2. 下記のことを行って INI ファイルのツールカタログを停止できます。
C:\MMC2\dpmill.ini / dpturn.ini へ新たに下記の入力を行います(変数は立上が
り時にのみ読込まれます)。
[ACCESSLEVEL]
USE_CATALOG=7
USE_CATALOG=0 と入力するとツールカタログおよびツールエティタは使用
できなくなります。
3. テクノロジメモリもツールカタログも停止した状態で,ユーザ画面がダイアロ
グレベル 6 に設定されていなければ,
「ツールと材料 (Tools and material)」では
なく「ツールチェンジ (Tool change)」がダイアログレベル 6 として表示されま
す。レベルを選択するとすぐに「ツールチェンジ」画面フォームが表示されま
す。
4. 画面フォーム ’Blank + Options’ にはソフトキー ’Match tool data’ が追加されてい
ます。このソフトキーはツールデータイメージ TO_INI.INI を NC からディレ
クトリ ’DP.DIR\SIM.DIR’ へコピーするのに使います。
5. 画面フォーム ’Blank + Options’ にはソフトキー ’Match machine data’ が追加され
ています。このソフトキーはマシンデータイメージ INITIAL_INI を NC から
ディレクトリ ’DP.DIR\SIM.DIR’ へコピーするのに使います。
6. 初めてシミュレーションルーチンを走らせた時に上記のファイルがどちらとも
なければ,システムがデータをマッチングさせる必要があるかどうか聞いてき
ます。
1-275
7. 特定のツールについてツールデータが保存されていない場合は,ユーザは下記
のいずれかの手順オプションを選択する必要があります。次のソフトキーが表
示されます。
- Ignore(無視):すべてのオフセットデータが内部的に 0 にセットされま
す。プログラムされたパス上にポリマーカが表れます。
- Always ignore(常時無視)
:a) と同じような働きをします。このシミュ
レーション実行中は,その他の欠けているツールデータすべてに対して
同じ処理が自動的に適応されます。
- Abort(強制終了):シミュレーションの実行が中断され,アラーム 17191
(" 不正 T 番号 ") が出力されます。
- Default(デフォルト)
(旋盤加工アプリケーションにはありません。ツー
ル管理と一緒に使うこともできません。):シミュレーション実行中にデ
フォルトツールのデータ(タイプ 120,長さ 100,「ブランク + オプショ
ン」画面フォームに記入されている直径)が使われます。
- Always default(常時デフォルト)(旋盤加工アプリケーションにはありま
せん。ツール管理と一緒に使うこともできません。)
:d) と同じような働
きをします。このシミュレーション実行中は,その他の欠けているツー
ルデータすべてに対して同じ処理が自動的に適応されます。
■ 構成データのアーカイブ
"Services/Interactive Programming" データエリアではいつでも,
「簡易対話プログ
ラミング」の標準構成データおよび構成データのユーザ専用拡張機能の両方を読
込んだり読出したりできます。または両方ともバッチスタートアップに含めるこ
ともできます。
(注)ファイル取扱いの詳細な説明については「YS840DI ユー
ザーズマニュアル・操作編」の 「サービスユーザエリア」
を参照してください。
参照: YS840DI ユーザーズマニュアル・操作編
1-276
1.6.3 補足条件
MMC 102/103 で行う操作パネル設定は,すべて「簡易対話プログラミング」ファ
ンクションで行うことができます。
(注)できるだけ下記の操作パネルプラットフォームをお使いくだ
さい。
16MB の RAM を装備した MMC 102/103
カラーモニタ (OP 031/032)
QWERTY キーボードからの操作
定義された言語ステートメントへのシミュレーションチャンネルの応答は,「ユー
ザーズマニュアル・プログラミング編」で説明しています。
1.6.2「■一般事項 , アプリケーション」の「プログラムインタプリタ」(システム
変数 $P_SIM の評価)も参照してください。
1-277
1.6.4 データの説明 (MD,SD)
文書中のデータ説明はシミュレーションデータに適用されます。
参照: YS840DI API 取扱説明書
1.6.5 信号の説明
なし
1.6.6 例
「簡易対話プログラミング」ファンクションは次のような旋盤のパートプログラム
の作成およびシミュレーションに使用できます。
インフィード方向軸 X
長さ方向軸 Z
回転軸 C (マスタスピンドル)
補助軸 Q (ローダ)
固定位置タレット
実際のマシン環境は納入時の「簡易対話プログラミング」の標準的な状態とは異
なっているので,少なくとも下記ような変更を行う必要があります。
1. 1.6.2「■フライス加工または旋盤加工の選択」の指示に従って旋盤加工アプリ
ケーション用に「簡易対話プログラミング」を設定してください。
2. 1.6.2「■軸名のカスタマイズ」の指示に従って軸識別子を設定してください。
3. 1.6.2「■ SW 3.1 までのシミュレーションデータの最適化」または 「■ SW 3.2
以降を使用したシミュレーションデータの設定」の指示に従ってシミュレー
ションデータを設定してください。
4. 1.6.2「■ツールオフセットデータの設定」の指示に従ってツールオフセット
データを設定してください。
これらの変更がなされてはじめて「簡易対話プログラミング」システムは上記の
旋盤で使用したり,実際の環境で加工シミュレーションを行える状態になります。
1-278
1.6.7 データフィールド,リスト
■ マシンデータ
■ 一般マシンデータ
番号
識別子
名称
参照
一般事項 ($MN_ ...)
10000
AXCONF_MACHAX_NAME_TAB
[n]
マシン軸名
1.11 (K2)
10060
POSCTRL_SYSCLOCK_TIME_RA
TIO
位置制御サイクル係数
1.8 (G2)
10070
IPO_SYSCLOCK_TIME_RATIO
補間器サイクル係数
1.8 (G2)
10100
PLC_CYCLE_TIMEOUT
最大 PLC サイクル時間
1.15 (P3)
10120
PLC_RUNNINGUP_TIMEOUT
PLC 起動監視時間
1.9 (H2)
12000
OVR_AX_IS_GRAY_CODE
軸フィードオーバライドスイッチ,グレイコード
1.18 (V1)
12020
OVR_FEED_IS_GRAY_CODE
パスフィードオーバライドスイッチ,グレイコード 1.18 (V1)
12040
OVR_RAPID_IS_GRAY_CODE
早送りオーバライドスイッチ,グレイコード
1.18 (V1)
12060
OVR_SPIND_IS_GRAY_CODE
スピンドルオーバライドスイッチ,グレイコード
1.18 (V1)
13000
DRIVE_IS_ACTIVE[n]
ドライブ起動 (611D)
1.8 (G2)
18210
MM_USER_MEM_DYNAMIC
DRAM 内のダイナミックユーザメモリ
2.14 (S7)
■ チャンネル別マシンデータ
チャンネル別 ($MC)
20000
CHAN_NAME
チャンネル名
1.10 (K1)
20050
AXCONF_GEOAX_ASSIGN_
TAB[n]
ジオメトリ軸のチャンネルへの割当て
1.11 (K2)
20060
AXCONF_GEOAX_NAME_TAB[n] チャンネルのジオメトリ軸
1.11 (K2)
20070
AXCONF_MACHAX_USED[n]
チャンネルの有効マシン軸名
1.11 (K2)
20080
AXCONF_CHANAX_NAME_
TAB[n]
チャンネルのチャンネル軸名
1.11 (K2)
20110
RESET_MODE_MASK
パートプログラム起動後の制御初期設定の定義
1.11 (K2)
20120
TOOL_RESET_VALUE
起動時(リセット/パートプログラム終了)にツー 1.11 (K2)
ル長補正が選択されたツール
20310
TOOL_MANAGEMENT_MASK
様々な形態でのツール管理の起動
/FBW/
20700
REFEP_NC_START_LOCK
基準点なしの NC スタートディスエーブル
1.16 (R1)
1-279
■ 軸別マシンデータ
軸別 ($MA_ ...)
30130
CTRLOUT_TYPE[n]
速度指令の出力タイプ
1.8 (G2)
30240
ENC_TYPE[n]
実際値ののタイプ読込み(位置実際値)
1.8 (G2)
30350
SIMU_AX_VDI_OUTPUT[n]
シミュレーション軸用軸信号出力
1.8 (G2)
35000
SPIND_ASSIGN_TO_MACHAX[n] スピンドルのマシン軸への割当て
35010
GEAR_STEP_CHANGE_ENABLE
[n]
35500
SPIND_ON_SPEED_AT_IPO_STAR 速度指令範囲でのスピンドルでのフィードイネーブ 1.17 (S1)
T[n]
ル
35510
SPIND_STOPPED_AT_IPO_START 固定スピンドルでのフィードイネーブル
[n]
1.17 (S1)
ギアステージ変更可能。スピンドルに数段階のギア 1.17 (S1)
ステージ有り。
1-280
1.17 (S1)
1.7 突き当て停止 (F1)
1.7.1 概略説明
「突き当て停止」ファンクションを使用して,ワークをクランピングするために心
押台またはスリーブをエンドリミット位置へ移動することができます。クランピ
ングトルクおよび固定停止点監視ウィンドウをパートプログラム中にプログラミ
ングしたり,固定停止点に到達した後で設定データを介してそれらを変更したり
できます。
「突き当て停止」ファンクションは,軸だけでなく,軸トラバース能力を有する主
軸についても実行できます。
このファンクションは異なった軸で同時に実行できます。また,他の軸の動作と
並行して実行することもできます。
1.7.2 詳細説明
■ 一般情報,アプリケーション
アプリケーション
「突き当て停止 (FXS = Fixed Stop) 」ファンクションは,ワークのクランピングに必
要な定義された力を,例えば心押台,スリーブ,およびグリッパに対して生成す
るように設計されています。このファンクションは機械的基準点へのアプローチ
にも適用できます。トルクを十分に減少すれば,プローブを接続せずに簡単な測
定オペレーションを行うこともできます。
「突き当て停止」ファンクションは,軸だけでなく,軸動作能力を有する主軸にも
適用できます。
このファンクションは異なった軸に対して同時に適用することができます。また,
他の軸の動作と並行して適用することもできます。
どのようなパス(直線,円,スプライン)を選択しても,そのパス上で固定停止
点アプローチが可能です。
可用性
「突き当て停止」ファンクションは MD 37000 : FIXED_STOP_MODE ( 突き当て停
止モード ) を 1 にセットしていれば使用できます。この状態になっていればこの
ファンクションを NC プログラムからコマンド "FXS[x]=1" でスタートすることが
できます。
1-281
制限事項
「突き当て停止」は下記に対しては使用できません。
• 中断待機
• ガントリ軸
• PLC によって排他的に制御された競合している位置決め軸 (FXS を NC プログ
ラムから選択しなければならない )
(注)「突き当て停止」ファンクションを起動してからは,送り軸
および(または)主軸について新たに位置をプログラムする
ことはできません。
主軸についてこのファンクションを選択する場合には,予め
主軸を位置制御モードに切換えておいてください。
■ 一般機能性
■ 機能シーケンス,プログラミング,パラメータ化
プログラミング
突き当て停止は:
コマンド FXS[ マシン軸識別子 ] = 1 で選択し,
コマンド FXS[ マシン軸識別子 ] = 0 で選択解除します。
クランピングトルクは:
コマンド FXST[ マシン軸識別子 ] = < トルク > で設定します。
クランピングトルクは,ドライブの静止トルクの % で,または MSD の定格モー
タトルクの % で指定します。
コマンド
FXSW[ マシン軸識別子 ] = < ウィンドウ幅 > を使用して固定停止点監視ウィン
ドウの幅を設定します。
単位は初期設定に従います(mm,インチまたは度)
。
1-282
チャンネル軸識別子
ソフトウェアバージョン 4 以降では,固有のチャンネル軸識別子が各マシン軸に
割当てられているなら,マシン軸識別子のかわりにチャンネル軸識別子を使用す
ることができます。
制限事項:アクティブな変換またはフレームを有するマシン軸についてはチャン
ネル識別子を使用してはなりません(オプションディスエーブル)。マシン軸を
カップリングした軸 (つまりスレーブ軸)として機能する場合は,システムが
チャンネル軸識別子のプログラミングをディスエーブルし,アラーム 14092
"Wrong axis type(軸タイプ不正)" を出力します。
コマンドはモーダルです。
目標点に向かっての動作は,パスとしても位置決め軸動作としても定義できます。
位置決め軸として定義する場合,"FXS" ファンクションをブロックにまたがって
適用することができます。このファンクションは異なったマシン軸について同時
に選択することもできます。FXST コマンドおよび FXSW コマンドはオプション
です。このファンクションを起動する移動パスおよびコマンドは同一のブロック
内にプログラミングしなければなりません。
例
マシン軸識別子を使用する場合:
X250 Y100 F100 FXS[X1]=1
X250 Y100 F100 FXS[X1]=1 FXST[X1]=12.3
X250 Y100 F100 FXS[X1]=1 FXST[X1]=12.3 FXSW[X1]=2 ; mm
X250 Y100 F100 FXS[X1]=1 FXSW[X1]=2 ; mm
参照: YS840DI ユーザーズマニュアル・プログラミング編
マシン軸が明確に割当てられたチャンネル軸識別子:
プログラミング方法の違いを説明するために,次の例では,チャンネル軸 X はマ
シン軸 AX1(または X1(MD 10000 $MN_AXCONF_MACHAX_NAME_TAB 中の
名称))のイメージとしてプログラムされています。
マシン軸識別子を使用したプログラムミング
チャンネル軸識別子を使用したプログラムミング
FXS[X1] = 1; X1 の選択
FXS[X] = 1; X -> X1 の選択
FXST[X1] = 10; X1 に対する新しいトルク
FXST[X] = 10; X -> X1 に対する新しいトルク
FXSW[X1] = 5; X1 に対する新しいウィンドウ
FXSW[X] = 5; X -> X1 に対する新しいウィンドウ
チャンネル軸 X がマシン軸 AX1,X1l のイメージとしてプログラムされていれば,
下記の 4 つのプログラム行はすべて同じ働きをします。
Z250 F100 FXS[AX1]=1 FXST[AX1]=12.3 FXSW[AX1]=2000
Z250 F100 FXS[X1]=1 FXST[X1]=12.3 FXSW[X1]=2000
Z250 F100 FXS[X]=1 FXST[X]=12.3 FXSW[X]=2000
Z250 F100 FXS[X]=1 FXST[X1]=12.3 FXSW[AX1]=2000
1-283
機能シーケンス
このファンクションを下記の例(スリーブがワークに押しつけられる)で説明し
ます。
デジタルドライブまたはアナログドライブの「突き当て停止」に関する注意点を
1.7.2「■デジタルドライブ用の突き当て停止」と「■アナログドライブ用の突き
当て停止」で説明しています。
「突き当て停止」後の実際位置
プログラムされたエンド位置
固定停止点監視ウィンドウ
スタート位置
図 1.53 突き当て停止の例
選択
ブロック準備中に,NC はコマンド FXS[x]=1 で「突き当て停止」が選択されたこと
を検出し,IS "Activate travel to fixed stop" (DB31, ... DBX62.4) を PLC 送信すること
によってこのファンクションが選択されたことを PLC に通知します。
MD 37060: FIXED_STOP_ACKN_MASK(「突き当て停止」に対しての PLC の確認
応答)が設定されると,NC は PLC からの IS "Enable travel to fixed stop" (DB31, ...
DBX3.1) による確認応答を待ちます。
次に,プログラムした速度で,スタート位置からプログラムした目標位置へのア
プローチを行います。固定停止点は送り軸/主軸のスタート位置と目標位置の間
に置かなければなりません。プログラムしたトルク制限はブロックがスタートし
た時点から有効になっているので,固定停止点へのアプローチはトルクを減少し
て行うこともできます。加速度の自動減少によって NC がトルク制限を行うことも
できます。
ブロックにトルクをプログラムしていない場合,またはプログラムのスタート時
点からトルクをプログラムしていない場合は,軸別 MD 37010:
FIXED_STOP_TORQUE_DEF(クランピングトルク用の初期設定)に設定した値を
適用します。
1-284
固定停止点到達
軸が機械的固定停止点(ワーク ) に接触するとただちにドライブ内の閉ループ制御
によって,軸をさらに前進させようとしてトルクが上がります。トルクはプログ
ラムされたリミット値まで上がってからそこで一定になります。
「固定停止点到達」ステータスは,MD 37040: FIXED_STOP_BY_SENSOR(センサ
を介しての固定停止点の検出)の設定に応じて,下記の方法で確認することがで
きます。
• FIXED_STOP_BY_SENSOR = 0
この「固定停止点到達」ステータスは,軸方向の輪郭のずれ ( つまり予想した
追従誤差と実際の追従誤差との違い ) が MD 37030:FIXED_STOP_THRESHOLD
(固定停止点検出用スレッショルド)に設定した値を超過したら達成します。
• FIXED_STOP_BY_SENSOR = 1
外部センサが PLC を介して NC に IS "Sensor fixed stop" (DB31, ... DBX1.2) を送
ることによって「固定停止点到達」ステータスを伝達します。
• FIXED_STOP_BY_SENSOR = 2
「固定停止点到達」ステータスは,輪郭モニタがこのステータスを検出した場
合,または外部センサが DB31; DBX 1.2 の信号を 0 から 1 に変更することに
よってこのステータスを伝達した場合に達成します。
軸輪郭のずれについての説明が下記の参照に記載されています。
参照: 1.5 診断機能 (D1)
内部処理
NC は「固定停止点到達」ステータスを検出したら distance-to-go(移動距離)を削
除し,次の位置セットポイントを作成します。コントローライネーブルコマンド
はアクティブのままになります。
次に IS "Fixed stop reached" (DB31, ... DBX62.5) によって PLC にこのステータスを通
知します。
それに従って MD 37060: FIXED_STOP_ACKN_MASK が設定されと,NC は PLC か
らの IS "Acknowledge fixed stop reached" (DB31, ... DBX1.1) としての確認応答を待ち
ます。
次に NC は,ブロック切換えを実行するか,あるいは次の位置決め動作を考慮しま
す。ただし,クランピングトルクが有効になるようにセットポイントはドライブ
アクチュエータに適用したままにしておきます。
固定停止点監視ファンクションは停止位置に到達するとただちに起動します。
1-285
監視ウィンドウ
ブロックに固定停止点監視ウィンドウをプログラムしていない場合,またはプロ
グラムのスタート時点から固定停止点監視ウィンドウをプログラムしていない場
合は,MD 37020:FIXED_STOP_WINDOW_DEF(固定停止点監視ウィンドウ用初期
設定)に設定した値を適用します。
軸が固定停止点を検出したときの位置から外れると,アラーム 20093 "Fixed stop
monitoring has responded" を出力し,「突き当て停止」ファンクションを選択解除し
ます。
ユーザは,軸が固定停止位置から外れた時にだけアラームが起動するようにウィ
ンドウを選択しなければなりません。
固定停止点に到達しない
「固定停止点到達」ステータスを検出しないままプログラムされたエンド位置に到
達した場合,アラーム 20091 "Fixed stop not reached"(固定停止点に到達しない)が
MD 37050: FIXED_STOP_ALARM_MASK(固定停止点アラームのイネーブル ) の
ステータスに応じて出力されます。
ファンクションの強制終了
パルスディスエーブルコマンド,PLC 確認応答の取り消し,またはアプローチブ
ロックにおけるリセットのために「突き当て停止」ファンクションが強制終了し
た場合は,MD 37050: FIXED_STOP_ALARM_MASK でアラーム 20094 を表示する
かまたは非表示にするかを制御できます。
1.7.4 「データの説明 (MD, SD)」を参照してください。
アラーム非表示強制終了
アラーム 20094 が MD 37050: FIXED_STOP_ALARM_MASK 内で抑止されていれ
ば,「突き当て停止」はアプローチブロック内で PLC から(例えばオペレータの
キー入力に応答して),アラームを発生させることなく強制終了することができま
す。
「突き当て停止」ファンクションは "Fixed stop not reached"(固定停止点に到達しな
い)を受けた場合も "Fixed stop aborted"(固定停止強制終了)を受けた場合も選択
解除されます。
故障または強制終了に続く処理
IS "Activate travel to fixed stop" (DB31, ... DBX62.4) はリセットされます。
MD 37060: FIXED_STOP_ACKN_MASK の設定に応じて,NC は PLC が IS "Enable
travel to fixed stop" (DB31, ... DBX3.1) をリセットすることによる確認応答を待ちます。
トルク制限を取消し,ブロック切換えを実行します。
1-286
選択解除
NC はコマンド FXS[x]=0 に基づいてファンクションが選択解除されたことを検出
します。
ファンクションが選択解除された後は軸がどこで停止するか予測できないので,
内部的にブロックサーチ停止が開始します。
トルク制限と固定停止点監視ウィンドウによる監視は取消されます。IS "Activate
travel to fixed stop" (DB31, ... DBX62.4) および "Fixed stop reached" (DB31, ... DBX62.5)
がリセットされます。
MD 37060: FIXED_STOP_ACKN_MASK の設定に応じて,NC は PLC が IS "Enable
travel to fixed stop" (DB31, ... DBX3.1) およびまたは "Acknowledge fixed stop reached"
(DB31, ... DBX1.1) をリセットすることによる確認応答を待ちます。
次に,軸が位置制御モードに切換わり(フォローアップモードは終了します)新
しい実際位置との同期をとります。
次に,プログラムされた移動動作を実行しなければなりません。この動作は固定
停止点から逸れるようにしなければなりません。そうしなければ,停止点に支障
が及んだり,マシンが損傷する可能性があります。
目標位置に到達してからブロック切換えを実行します。
クランピングトルク/固定停止点監視ウィンドウの変更
コマンド FXST[x] および FXSW[x] をプログラミングしてパートプログラムの中の
クランピングトルクおよび固定停止点監視ウィンドウを変更することができます。
これらの変更は同一のブロック内にプログラムされた移動動作より先に有効にな
ります。
新しいトルクがプログラムされると,適当なブロックの先頭から,この新しいト
ルクへのステップチェンジ遷移を実行します。
新しい固定停止点監視ウィンドウがプログラムされると,ウィンドウの幅が変更
されるだけでなく,軸があらかじめ動いていた場合はウィンドウの中心基準点も
変更されます。ウィンドウが変更した時点でのマシン軸の実際位置が新しいウィ
ンドウの中心点となります。
■ リセットおよびファンクション強制終了に対する応答
リセットに対する応答
FXS ファンクションはリセットすることによって選択時(固定停止点にまだ到達
していない)に強制終了することができます。固定停止点に到達しかけている
(セットポイントはすでに固定停止点の反対側に到達しているが,まだ固定停止点
検出のための出発点内にある)ときに強制終了する場合は,そのためになんらか
の支障(短時間のフォローアップで)が発生しないように行います。
固定停止点に到達すると,たとえリセットされた後でも,ただちにファンクショ
ンはオペレーションできる状態になります。
1-287
ファンクションの強制終了
次の場合にファンクションは強制終了します。
非常停止:
• 非常停止の後 NC およびドライブは電源を切断します。つまり,PLC が応答し
なければなりません。
注意
非常停止で「突き当て停止」ファンクションを取消した後にマシンが
危険な状態にならないようにしてください。
固定停止点監視ファンクションは下記の場合にアラームを出します。
• 軸が固定停止点から出る
• ツールの破損
• パルスディスエーブル
■ ブロックサーチ応答
計算によるブロックサーチ
下記のような応答がなされます。
• 軸を固定リミットで停止するようになっているプログラムセクション内に目標
ブロックが配置されている場合,軸が固定停止点にまだ到達していなければ,
その軸は固定停止点にアプローチします。
• 軸を固定リミットで停止させないようになっているプログラムセクション内に
目標ブロックが配置されている場合,軸がまだ固定停止点にあれば,その軸は
固定停止点から離れます。
• 軸が固定停止点にアプローチしなければならない場合,または固定停止点から
離れなければならない場合は,アラームが出力されます。この動作は NC ス
タートによる確認応答の後で実際に実行します。
• 目標ブロックのスタート時には,FXST[x] および FXSW[x] は,通常のプログラ
ム処理時の値と同じ値に設定します。
計算によらないブロックサーチ
コマンド FXS,FXST および FXSW は無視されます。
1-288
■ 付帯事項
設定データ
下記の軸別設定データが「突き当て停止」ファンクション用に提供されています。
• SD 43500: FIXED_STOP_SWITCH(
「突き当て停止」の選択 )
• SD 43510: FIXED_STOP_TORQUE(突き当て停止に対するクランピングトルク )
• SD 43520: FIXED_STOP_WINDOW(固定停止点監視ウィンドウ )
これらの設定データは軸が固定停止点に到達した時にだけ有効です。
設定データのステータスは操作パネルを通して「パラメータ」エリアに表示され
ます。
コマンド FXS[x],FXST[x] および FXSW[x] で,これらの設定データのブロック同
期変更をします。FXST[x] および FXSW[x] がプログラムされていない場合,
「突き
当て停止」が起動していれば MD 37010: FIXED_STOP_TORQUE_DEF および MD
37020:FIXED_STOP_WINDOW_DEF からのデフォルトが設定データに移されます。
クランピングトルクおよび固定停止点監視ウィンドウに対する設定データは,
ユーザが変更したり PLC を介して変更したりすることができます。従って,固定
停止点に到達してからクランピングトルクを高くしたり低くしたり,または変更
された固定停止点監視ウィンドウを指定したりできます。
クランピングトルク変更はステップチェンジとしてドライブに伝達されます。
パートプログラム内のステータスチェック
システム変数 $AA_FXS[x] は「突き当て停止」ファンクションのステータスを示
します。このシステム変数には下記のコーディングがあります。
$AA_FXS=
0 軸が固定停止点の位置にない
1 固定停止点へのアプローチが成功した(軸が固定停止点監視ウィンドウの範
囲にある )
2 固定停止点へのアプローチが失敗した(軸が軸が固定停止点の位置にない)
パートプログラム内でのシステム変数の質問によってブロックサーチが停止します。
パートプログラム内でのステータス質問の結果,例えば「突き当て停止」ファンク
ションの誤ったオペレーションシーケンスに対応することができます。
次のことは下記の例に当てはまります。
MD 37050: FIXED_STOP_ALARM_MASK = 0 エラーが起こってもアラームが発生
しません。そのためブロックが切替り,エラーがシステム変数を介して評価でき
ます。
1-289
例
X300 Y500 F200 FXS[X1]=1 FXST[X1]=25 FXSW[X1]=5
IF $AA_FXS[X1]=2 GOTOF FXS_ERROR
G01 X400 Y200
無効なインタフェース信号
下記のインタフェース信号 (PLC → NCK) は固定停止点にある軸に対してファンク
ション(移動動作も含む)が選択解除するまで無効です。
• IS "Axis/spindle disable"(DB31, ... DBX1.3)
• IS "Controller disable"(DB31, ... DBX2.1)
固定停止点の実際位置
例えば突き当て停止が成功した後でのテストの目的で,システム変数 $AA_IM[x]
を使用してマシン軸の実際位置を求めることができます。
その他のファンクションとの適合性
"Measure with deletion of distance-to-go"("MEAS" コマンド)および「突き当て停
止」の両方を同一ブロック内にプログラムすることはできません。
例外:
ひとつのファンクションがパス軸上で動き,もうひとつのファンクションが位置
決め軸上で動く場合,またはどちらのファンクションも位置決め軸上で動く場合。
輪郭監視
軸輪郭監視ファンクションは「突き当て停止」がアクティブなときは無効です。
位置決め軸
「突き当て停止」が POSA 軸に適用されている場合は,ブロック切換えは固定停止
動作とは別に行われます。
アラーム
• このファンクションがアクティブになっているときに固定停止位置に到達しな
い場合は,アラーム 20091 "Fixed stop not reached" が出力され,ブロック切換え
が行われます。
• 軸が固定停止点に到達した後でその軸に対する移動要求が出される(例えば
パートプログラムから,PLC によって,コンパイルサイクルまたは操作パネル
から)場合,アラーム 20092 "Fixed stop is active for this axis" が出力され,軸は
制止状態のままになります。
• 軸が固定停止点に到達した後で SD: FIXED_STOP_WINDOW(固定停止点監視
ウィンドウ)に指定されている以上の値によってその位置を離れる場合,ア
ラーム 20093 "Fixed stop monitoring has responded" が出力されます。「突き当て
停止」ファンクションはこの軸に対して選択解除され,システム変数
$AA_FXS[x] は "2" に設定されます。
1-290
■ 突き当て停止
選択
ブロックの準備中に NC は「突き当て停止」が選択されたことをコマンド
FXS[x]=1 に基づいて検出し,IS "Activate travel to fixed stop" (DB31, ... DBX62.4) を
送ることによって PLC にこのファンクションが選択されたことを通知します。
それに従って MD 37050: FIXED_STOP_ACKN_MASK が設定されると,NC は PLC
からの IS "Enable travel to fixed stop" (DB31, ... DBX3.1) による確認応答を待ち,そ
れからこのファンクションをスタートさせます。デジタルドライブ用の NC はこの
確認応答を要求しません。
この時点で軸は目標位置へプログラムされた速度でトラバースします。同時にク
ランピングトルク(FXST[x] または MD 37010: FIXED_STOP_TORQUE_DEF を介
して指定する)がデジタルインタフェースを介してドライブに伝達され,ドライ
ブはドライブのトルクを減少します。NC は FXST[x] または MD 37010:
FIXED_STOP_TORQUE_DEF に従って自動的に加速レートも減少します。
固定停止点到達
軸が固定停止点に到達するとただちに軸方向の輪郭のずれが増大します。MD
37030: FIXED_ STOP_THRESHOLD に設定されたスレッショルドが超えられるか,
または IS "Sensor fixed stop" (DB31, ... DBX1.2) が設定されると,制御システムは固
定停止点に到達したことを知ります。
NC は残りの移動距離(distance-to-go)を削除し,位置セットポイントをフォロー
します。コントローライネーブルコマンドはアクティブのままになります。
次に NC は PLC に IS "Fixed stop reached" (DB31, ... DBX62.5) を送ります。
それに従って MD 37060: FIXED_STOP_ACKN_MASK が設定されると,NC は PLC
からの IS "Acknowledge fixed stop reached" (DB31, ... DBX1.1) として確認応答を待ち
ます。デジタルドライブ用の NC はこの確認応答を要求しません。
ブロック切換えを実行します。クランピングトルクは引き続き適用されます。
設定データを介してのクランピングトルクの変更はステップチェンジとしてドラ
イブに伝達されます。
固定停止点に到達しない
「固定停止点到達」ステータスが検出されないままにプログラムされたエンド位置
に到達した場合,ドライブ内のトルク制限はデジタルインタフェースを介して取
消され,IS "Activate travel to fixed stop" (DB31, ... DBX62.4) がリセットされます。
MD 37060: FIXED_STOP_ACKN_MASK の設定に応じて,NC は PLC が IS "Enable
travel to fixed stop" (DB31, ... DBX3.1) をリセットすることによって確認応答してく
るのを待ちます。それからプログラムは次のブロックに進みます。
1-291
選択解除
選択解除は 1.7.2「■機能シーケンス , プログラミング , パラメータ化」で説明され
るように行われます。
図
下図は,モータの電流,追従誤差,および 「突き当て停止」に対する IS の特性を
示しています。
FXST[x] または MD: FIXED_STOP_TORQUE_DEF
モータ電流
追従誤差
FXS[x]=1 のブロック
IS "Activate FXS"
IS "FXS reached"
ブロック切換え
図 1.54 FXS についての図
1-292
1.7.3 補足条件
このファンクションはオプションです。
1.7.4 データの説明 (MD,SD)
■ 軸別マシンデータ
37000
MD 番号
FIXED_STOP_MODE
突き当て停止モード
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/4
単位 : -
データタイプ : BYTE
意味 :
適用開始 SW バージョン : 2.1
このマシンデータは「突き当て停止」ファンクションのスタート方法を定義
する。
MD=0 突き当て停止は使用不可(オプションがない)
。
MD=1 NC プログラムにコマンド FXS[x]=1 を入力して突き当て停止をス
タートさせることができる。
ソフトウェア バージョン 3 以降:
MD=2 PLC プログラムにコマンド FXS[x]=1 を入力することによってのみ突
き当て停止をスタートさせることができる。
MD=3 PLC プログラムおよび NC プログラムにコマンド FXS[x]=1 を入力し
て突き当て停止をスタートさせることができる。
1-293
37010
MD 番号
FIXED_STOP_TORQUE_DEF
クランピングトルク用デフォルト
初期設定 : 5.0
最小入力リミット : 0
最大入力リミット : 100.0
変更が有効になるための条件 :
電源オン
保護レベル : 2/4
単位 : %
データタイプ : DOUBLE
意味 :
適用開始 SW バージョン : 2.1
このマシンデータ中の最大モータトルク(FDD の最大電流セットポイントと
一致)の % で表す。
クランピングトルククランピングトルクは固定停止点に到達するか,または
IS "Ac-knowledge fixed stop reached" (DB31, ... DBX1.1) が設定されたらすぐにオ
ペレーション可能になる。
入力されている値はデフォルトであり,次の条件のもとでのみ有効である。
• コマンド FXST[x] でプログラムされたクランピングトルクがない。
• SD 43510: FIXED_STOP_TORQUE に設定されたクランピングトルクが変更
されていない(固定停止点に到達した後で)
。
関連性
SD 43510: FIXED_STOP_TORQUE(突き当て停止のためのクランピングトル
ク)
37020
MD 番号
FIXED_STOP_WINDOW_DEF
固定停止点監視ウィンドウ用デフォルト
初期設定 : 1.0
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2/4
単位 : mm,度
データタイプ : DOUBLE
適用開始 SW バージョン : 2.1
意味 :
固定停止点監視ウィンドウに対する初期設定がこのマシンデータに設定され
ている。
固定停止点に到達すると,つまり IS "Fixed stop reached" (DB31, ... DBX62.5) を
設定するとすぐに固定停止点監視ウィンドウがオペレーション可能になる。
軸/主軸が,MD: FIXED_STOP_WINDOW_DEF に指定されている許容範囲を
超えることによって,固定停止点が検出された位置を離れると,アラーム
20093 "Fixed stop monitoring has responded" が出力され,"FXS" ファンクション
は選択解除される。
入力されている値はデフォルトであり,次の条件のもとでのみ有効である。
• コマンド FXSW[x] でプログラムされた固定停止点監視ウィンドウがない。
• SD 43520: FIXED_STOP_WINDOW で設定された固定停止点監視ウィンドウ
が変更されていない(固定停止点に到達した後で)
。
関連性
SD 43520: FIXED_STOP_WINDOW(固定停止点監視ウィンドウ)
1-294
37030
MD 番号
FIXED_STOP_THRESHOLD
固定停止点検出用スレッショルド
初期設定 : 2.0
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2/4
単位 : mm, 度
データタイプ : DOUBLE
適用開始 SW バージョン : 2.1
意味 :
固定停止点検出用輪郭監視スレッショルドがこのマシンデータに入力されて
いる。
このマシンデータは MD: FIXED_STOP_BY_SENSOR = 0 のときのみ有効であ
る。
軸方向の輪郭のずれが MD: FIXED_STOP_THRESHOLD に設定しているス
レッショルドを超えると,IS "Fixed stop reached" (DB31, ... DBX62.5) が設定さ
れる。
この MD は次の場合は無意味
MD 37040: FIXED_STOP_BY_SENSOR = 1
関連性
IS "Fixed stop reached" (DB31, ... DBX62.5)
37040
MD 番号
FIXED_STOP_BY_SENSOR
センサによる固定停止点検出
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 2
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 2.1
意味 :
このマシンデータは「固定停止点到達」基準の求めかたを定義する。
MD=0 「固定停止点到達」基準は軸方向の輪郭のずれ
(MD: FIXED_STOP_THRESHOLD によって指定するスレッショルド)
に従って内部処理として求められる。
MD=1 「固定停止点到達」基準は外部センサによって検出され,
IS "for fixed stop" (DB31, ... DBX1.2) によって NC に送られる。
MD=2 輪郭監視ファンクション (MD = 0) または外部センサからの信号
(MD = 1) が応答したら,「固定停止点到達」基準に達したとみなす。
関連性
MD 37030: FIXED_STOP_THRESHOLD ( 固定停止点検出用スレッショルド )
IS "Sensor for fixed stop" (DB31, ... DBX1.2)
37050
MD 番号
FIXED_STOP_ALARM_MASK
固定停止点アラームのイネーブル
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 7
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
意味 :
適用開始 SW バージョン : 2.1
このマシンデータはアラーム 20091 "Fixed stop not reached" および 20094 "Fixed
stop aborted" の出力が必要となる条件を定義するために設定する。
MD= 0 アラーム 20091 "Fixed stop not reached" の抑止
MD=2
MD=3
アラーム 20091 "Fixed stop not reached" および
20094 "Fixed stop aborted"(ソフトウェアバージョン 4 以降)の抑止
アラーム 20094 "Fixed stop aborted"(ソフトウェアバージョン 4 以降)
の抑止
7 以上の可能値はアラームを抑止しない。
1-295
37060
MD 番号
FIXED_STOP_ACKN_MASK
突き当て停止に対する PLC の確認応答の監視
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/4
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 2.1
意味 :
このマシンデータは,「突き当て停止」ファンクションがアクティブのとき
に,NC が PLC からの確認応答を待つかどうかを決める。
ビット 0 = 0 NC は IS "Activate travel to fixed stop" (DB31, ... DBX62.4) を PLC
に送ってから,プログラムされた移動動作をスタートする。
0
=
1
NC は IS "Activate travel to fixed stop" (DB31, ... DBX62.4) を PLC
ビット
に送った後,PLC からの IS "Enable travel to fixed stop" (DB31, ...
DBX3.1) による確認応答を待ち,その後プログラムされた移動
動作をスタートする。ドライブ内のトルクを制限する前に動作
がスタートしないようするために,アナログドライブに対して
はビット 0 を 1 に設定する。
ビット 1 = 0 NC が IS "Fixed stop reached" (DB31, ... DBX62.5) を PLC に送った
ら,プログラムは次のブロックに進む。
ビット 1 = 1 NC は IS "Fixed stop reached" (DB31, ... DBX62.5) を PLC に送った
後,PLC からの IS "Acknowledge fixed stop reached" (DB31, ...
DBX1.1) による確認応答を待ち,プログラムされたトルクを出
力してから,ブロック切換えを実行する。プログラム可能なク
ランピングトルクを指定しなければならない場合に,PLC がド
ライブをトルク制御オペレーションに切換えられるようにアナ
ログドライブに対してはビット 1 を "1" に設定する。
関連性
IS "Activate travel to fixed stop" (DB31, ... DBX62.4)
IS "Enable travel to fixed stop" (DB31, ... DBX3.1)
IS "Fixed stop reached" (DB31, ... DBX62.5)
IS "Acknowledge fixed stop reached" (DB31, ... DBX1.1)
1-296
■ 軸別設定データ
43500
SD 番号
FIXED_STOP_SWITCH
突き当て停止の選択
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件:
即時
保護レベル : 7/7
単位 : -
データタイプ : BYTE
意味 :
適用開始 SW バージョン : 2.1
この設定データによって「突き当て停止」ファンクションの選択および選択
解除が行われる。
SD=0 「突き当て停止」ファンクションの選択解除
SD=1 「突き当て停止」ファンクションの選択
ソフトウェアバージョン 2.x 以降をインストールする場合,このデータはコマ
ンド FXS[x]=1/0 を使ってパートプログラムを介してしか上書きできない。
設定データのステータスは「パラメータ」エリア内の操作パネルに示される。
43510
SD 番号
FIXED_STOP_TORQUE
突き当て停止用クランピングトルク
初期設定 : 5.0
最小入力リミット : 0.0
最大入力リミット : 100.0
変更が有効になるための条件:
即時
保護レベル : 7/7
単位 : %
データタイプ : DOUBLE
意味 :
適用開始 SW バージョン : 2.1
クランピングトルクは最大モータトルクに対する %(FDD を使用する際の最
大電流値に対する % と一致)としてこの設定データに入力する。
この設定データは固定停止点に到達した場合にのみ有効である。
下記の場合に固定停止点に到達したとみなす。
- MD: FIXED_STOP_ACKN_MASK を使用する場合は,ビット 1 = 0(確認応答
を要求しない)IS "Fixed stop reached"(DB31, ... DBX62.5) が NC によって
設定される。
- MD: FIXED_STOP_ACKN_MASK を使用する場合は,ビット 1 = 1(確認応答
を要求する)IS "Fixed stop reached"(DB31, ... DBX62.5) が NC によって設
定され,IS "Acknowledge fixed stop reached" (DB31, ... DBX1.1) によって
確認応答が行われる。
設定データのステータスは「パラメータ」エリア内の操作パネルに示される。
FXST[x] コマンドを使用してこのデータに対するブロック同期変更を行うこ
とができる。
設定データを,ユーザが変更したり,PLC を介して変更することもできる。
それ以外の場合は,
「突き当て停止」がアクティブならこの値は MD:
FIXED_STOP_TORQUE_DEF から設定データへ送られる。
関連性
MD 37010: FIXED_STOP_TORQUE_DEF(クランピングトルク用初期設定)
1-297
43520
SD 番号
FIXED_STOP_WINDOW
固定停止点監視ウィンドウ
初期設定 : 1.0
最小入力リミット : 0.0
最大入力リミット : ***
変更が有効になるための条件:
即時
保護レベル : 7/7
単位 : mm, 度
データタイプ : DOUBLE
適用開始 SW バージョン : 2.1
意味 :
固定停止点監視ウィンドウがこの設定データに入力されている。
この設定データは固定停止点に到達したときにのみ有効である。
下記の場合に固定停止点に到達したとみなす。
- MD: FIXED_STOP_ACKN_MASK を使用する場合は,ビット 1 = 0(確認応答
を要求しない)IS "Fixed stop reached"(DB31, ... DBX62.5) が NC によって
設定される。
- MD: FIXED_STOP_ACKN_MASK を使用する場合は,ビット 1 = 1(確認応答
を要求する)IS "Fixed stop reached"(DB31, ... DBX62.5) が NC によって設
定され,IS "Acknowledge fixed stop reached" (DB31, ... DBX1.1) によって
確認応答が行われる。
固定停止点を検出した位置が SD 43520: FIXED_STOP_WINDOW_DEF で指定
している量を超えることによって許容範囲から出ると,アラーム 20093 "Fixed
stop monitoring has responded" が出力され,"FXS" ファンクションが選択解除さ
れる。
設定データのステータスは「パラメータ」エリア内の操作パネルに示される。
FXST[x] コマンドを使用してこのデータに対するブロック同期変更を行うこ
とができる。
設定データを,ユーザが変更したり,PLC を介して変更することもできる。
それ以外の場合は,「突き当て停止」がアクティブならこの値は MD:
FIXED_STOP_WINDOW_DEF から設定データへ送られる。
関連性
MD 37020: FIXED_STOP_WINDOW_DEF(固定停止点監視ウィンドウ用初期
設定)
1-298
1.7.5 信号の説明
送り軸/主軸からの信号 (DB31, ... )
送り軸/主軸への信号 (DB31, ... )
送り軸/主軸 3
送り軸/主軸 2
送り軸/主軸 1
突き当て停止を起動
(DBX62.4)
固定停止点到達の確認応答 (DBX1.1)
突き当て停止
固定停止点用センサ (DBX1.2)
突き当て停止イネーブル
(DBX3.1)
図 1.55「突き当て停止」用 PLC インタフェース信号
1-299
固定停止点に到達 (DBX62.5)
■ 送り軸/主軸別信号
■ 送り軸/主軸への信号
DB31, ... DBX1.1
データブロック
固定停止点到達の確認応答
送り軸/主軸への信号 (PLC → NCK)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
固定停止点に到達した後:
IS "Fixed stop reached" DB31, ... DBX62.5 = 1
信号が有効となる最初の
SW バージョン : 2.1
→軸はプログラムされたクランピングトルクで固定停止点に押しつけら
れる。
→固定停止点監視ウィンドウが起動する。
→プログラムは次のブロックに進む。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
固定停止点に到達した後:IS "Fixed stop reached" DB31, ... DBX62.5 = 1
→軸はプログラムされたクランピングトルクで固定停止点に押しつけら
れる。
→固定停止点監視ウィンドウが起動する。
→プログラムは次のブロックに進まず,チャンネルメッセージ
"Wait": Auxiliary function acknowledgment missing" が表示される。
固定停止点に到達した後:
IS "Fixed stop reached" DB31, ... DBX62.5 = 1 ファンクションが強制終了し,ア
ラーム "20094 axis %1 function aborted" が表示される。パートプログラムで
ファンクションが選択解除される ("FXS = 0") とき:トルク制限および固定停
止点ウィンドウの監視が取り消される。
この IS は次の場合は無意味
MD 37060: FIXED_STOP_ACKN_MASK(突き当て停止用の PLC 確認応答の監
視)= 0 または 1
関連性
MD 37060: FIXED_STOP_ACKN_MASK(突き当て停止用の PLC 確認応答の監
視)
IS "Fixed stop reached" (DB31, ... DBX62.5)
DB31, ... DBX1.2
データブロック
固定停止点用センサ
送り軸/主軸への信号 (PLC → NCK)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
固定停止点に到達
信号ステータス 0 あるいは
信号遷移 1 ---> 0
固定停止点に到達しない
関連性
信号は MD 37040: FIXED_STOP_BY_SENSOR が "1" に設定している場合のみ
有効。
1-300
信号が有効となる最初の
SW バージョン : 2.1
DB31, ... DBX3.1
データブロック
突き当て停止イネーブル
送り軸/主軸への信号 (PLC → NCK)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
パートプログラムによって "FXS" ファンクションが選択されるとき (IS
"Activate travel to fixed stop" = 1):
信号が有効となる最初の
SW バージョン : 2.1
突き当て停止が可能になり,軸がスタート位置からプログラムされた目標位
置へ,プログラムされた速度でトラバースする。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
パートプログラムによって "FXS" ファンクションが選択されるとき
(IS "Activate travel to fixed stop" = 1):
→突き当て停止はディスエーブル
→軸は減少されたトルクによって位置で静止
→チャンネルメッセージ " 待機:補助機能肯定応答が欠如 " が表示される。
固定停止点に到達する前 IS " 固定位置到達 " DB31, ... DBX62.5 = 0.
→突き当て停止が強制終了する
→アラーム "20094 軸 %1 機能が中断 " が表示される。
固定停止点に到達した後:
IS "Fixed stop reached" DB31, ... DBX62.5 = 1 トルク制限および固定停止点ウィ
ンドウの監視が取り消される。
この IS は次の場合は無意味
MD 37060: FIXED_STOP_ACKN_MASK(突き当て停止用の PLC 確認応答の監
視)= 0 または 2
関連性
MD 37060: FIXED_STOP_ACKN_MASK(突き当て停止用の PLC 確認応答の監
視)
IS "Activate travel to fixed stop" (DB31, ... DBX62.4)
■ 軸/主軸からの信号
DB31, ... DBX62.4
データブロック
突き当て停止の起動
送り軸/主軸からの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : 周期的
信号が有効となる最初の
SW バージョン : 2.1
信号ステータス 1 あるいは
信号遷移 0 ---> 1
「突き当て停止」ファンクションがアクティブ。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
「突き当て停止」ファンクションがアクティブではない。
DB31, ... DBX62.5
データブロック
固定停止点到達
送り軸/主軸からの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
"FXS" ファンクション選択後,固定停止点に到達した。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
"FXS" ファンクション選択後も,固定停止点に到達しない。
1-301
信号が有効となる最初の
SW バージョン : 2.1
1.7.6 例例
- 例なし -
1.7.7 データフィールド,リスト
■ インタフェース信号
DB 番号
ビット,バイト
名称
参照
軸/主軸別
31-48
1.1
固定停止点到達の確認応答
31-48
1.2
固定停止点センサ
31-48
1.3
軸/主軸ディスエーブル
1.1 (A2)
31-48
2.1
コントローライネーブル
1.1 (A2)
31-48
3.1
突き当て停止イネーブル
31-48
62.4
突き当て停止の起動
31-48
62.5
固定停止点到達
■ マシンデータ
番号
識別子
名称
軸別 ($MA_ ... )
37000
FIXED_STOP_MODE
突き当て停止モード
37010
FIXED_STOP_TORQUE_DEF
クランピングトルク用初期設定
37020
FIXED_STOP_WINDOW_DEF
固定停止点監視ウィンドウ用初期設定
37030
FIXED_STOP_THRESHOLD
固定停止点検出用スレッショルド
37040
FIXED_STOP_BY_SENSOR
センサによる固定停止点検出
37050
FIXED_STOP_ALARM_MASK
固定停止点アラームのイネーブル
37060
FIXED_STOP_ACKN_MASK
突き当て停止用 PLC 確認応答の監視
1-302
参照
■ 設定データ
識別子
番号
名称
参照
軸別 ($SA_ ... )
43500
FIXED_STOP_SWITCH
突き当て停止の選択
43510
FIXED_STOP_WINDOW
固定停止点監視ウィンドウ
43520
FIXED_STOP_TORQUE
突き当て停止用クランピングトルク
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいは MMC 101/102/103 を有するシステムのオンラインヘルプ
1-303
1-304
1.8 位置指令単位と検出単位 (G2)
1.8.1 概略説明
このセクションでは,下記項目の調整方法について説明します。
測定系
指令値系
運転精度
移動範囲
軸速度
また,軸制御に必要な手順についても説明します。
1-305
1.8.2 詳細説明
■ 速度,移動範囲,精度
■ 速度
パス/軸およびスピンドルの最大速度は,マシンの構造,ドライブのダイナミッ
ク応答,および実位置検出システムのリミット周波数(エンコーダリミット周波
数)に影響します。
最大軸速度は MD 32000: MAX_AX_VELO ( 最大軸速度 ) で定義されます。最大許
容スピンドル速度は MD 35100: SPIND_VELO_LIMIT ( 最大スピンドル速度 ) に設
定されます。
例については,以下を参照してください。
参照: 1.17 主軸機能 (S1)
MAX_AX_VELO での制限のほかに,制御システムも以下の公式に従って優先状態
に応じて最大パス速度を制限します。
Vmax ≦
パートプログラムブロック内の Progr. パス長さ (mm または度 )
IPO サイクル (s)
*0.9
IPO クロックサイクル設定の詳細については,以下を参照してください。
参照: 3.3 CNC 制御サイクル (G3)
プログラムされた送り速度および送り速度オーバライドの結果,送り速度が高速
である場合,最大パス速度は Vmax に制限されます。
極めて短いブロックの CAD システムによるプログラムで操作する場合,この自動
送り速度制限によって数ブロックにわたり速度が落ちることがあります。
例:
IPO クロックサイクル = 12 ms
N10 G0 X0 Y0; [mm]
N20 G0 X100 Y100; [mm]
⇒ブロック内のプログラムされた移動距離 = 141.42 mm
⇒ Vmax = (141.42 mm / 12 ms) * 0.9 = 10606.6 mm/s = 636.39 m/min
最少パスまたは軸速度に,以下の制限事項が適用されます。
Vmin ≧
10-3
incr.
計算分解能 [ ]*IPO
サイクル [s]
*0.9
mm または度
計算分解能は,MD 10200: INT_INCR_PER_MM ( 直線位置用の計算分解能 ) または
MD 10210: INT_INCR_PER_DEG ( 角度位置用の計算分解能 ) で定義されます。次
のページでさらに詳しく説明します。
速度が Vmin を下回った場合,移動動作は実行されません。
1-306
MD 10200: INT_INCR_PER_MM = 1000 [incr. / mm];
例:
IPO クロックサイクル = 12 ms;
⇒ V min = 10-3 / (1000 incr. / mm x 12 ms) = 0.005 mm / min ;
送り速度の値の範囲は,選択された計算分解能によって異なります。初期設定が,
MD 10200: INT_INCR_PER_MM ( 直線位置用の計算分解能 ) (1000incr. /mm) または
MD 10210: NT_INCR_PER_DEG ( 角度位置用の計算分解能 ) (1000incr. / 度 ) のとき,
以下の値の範囲は,規定の分解能でプログラムできます。
ジオメトリ軸用パスフィード F の値の範囲
メートル単位系システムでは
0.001 ≦ F ≦ 999 999.999 [mm/min, mm/rev, 度 /min, 度 /rev]
インチ単位系システムでは
0.001 ≦ F ≦ 399 999.999 [inch/min, inch/rev]
位置決め軸用フィードの値の範囲
メートル法では
0.001 ≦ FA ≦ 999 999.999 [mm/min, mm/rev, 度 /min, 度 /rev]
インチ単位系システムでは
0.001 ≦ FA ≦ 399 999.999 [inch/min, inch/rev]
スピンドル速度 S の値の範囲 :
0.001 ≦ S ≦ 999 999.999 [rev/min]
計算分解能が 10 倍になるかあるいは 1/10 になると,それに応じて値の範囲が変化
します。
■ 移動範囲
移動領域の値の範囲は,選択された計算分解能によって異なります。
初期設定が,MD 10200: INT_INCR_PER_MM ( 直線位置用の計算分解能 ) (1000incr. /
mm) または MD 10210:INT_INCR_PER_DEG ( 角度位置用の計算分解能 ) (1000incr. /
度 ) のとき,以下の値の範囲は,指定された分解能でプログラムできます。
表 1.4 軸の移動範囲
G71 [mm,度 ]
G70 [mm,度 ]
範囲
範囲
直線軸 X, Y, Z, ...
±× 999 999.999
±× 399 999.999
回転軸 A, B, C, ...
±× 999 999.999
±× 999 999.999
補間パラメータ I, J, K
±× 999 999.999
±× 399 999.999
回転軸の計測単位は常に度で表します。
計算分解能が 10 倍になるかあるいは 1/10 になると,それに応じて値の範囲が変化
します。
値の範囲は,ソフトウェアのリミットスイッチおよび作業領域で制限することが
できます。
1-307
参照: 1.2 送り軸監視機能及びプロテクションゾーン (A3)
回転軸の移動範囲は,マシンデータで制限することができます。
参照: 2.12 回転軸 (R2)
SW バージョン 4 以降の,直線軸および回転軸の広範な移動範囲に関する特殊事項
については,以下を参照してください。
参照: 1.16 原点復帰 (R1)
■ 制御系の位置決め精度
制御系の位置決め精度は,実位置分解能 ( = 1 mm あるいは 1 度当たりのエンコー
ダインクリメント数 ) および計算分解能 ( = 1 mm あるいは 1 度当たりの内部インク
リメント数 ) に依存します。
これら 2 つの値の粗分解能が,制御装置の位置決め精度を決定します。
この精度は,入力分解能,補間器,あるいは位置制御サイクルの選択に左右され
ません。
■ 分解能および正規化値のブロック図
次の図は,入力値がどのように内部単位に変換されるかを示したものです。
この図はさらに 1 mm あるいは 1 度当たりの内部インクリメント数への変換も表し
ています。入力分解能より精度の粗い計算分解能が選択されていると,この変換
で小数桁が失われることがあります。
図に示された実位置分解能の計算は,1.8.2「■ FGROUP および FGREF(SW5 以
降)」で説明します。
さらに,このセクションで説明されている以下のトピックの概略を説明します。
5. 寸法系(メートル/インチ)の選択
6. マシンおよび設定データの物理量の正規化
7. 基本系の変換
8. 計算分解能の設定
物理量 (MD 36110: POS_LIMIT_PLUS) がマシンデータパラメータ設定のファンク
ションとしてどのように変換されるかについての例を提示します (MD 10230:
SCALING_FACTORS_USER_DEF, MD 10220: SCALING_USER_DEF_MASK)。
1-308
計算例
入力/表示分解能
( 操作パネルで入力 )
マシンデータの入力および
入力/出力単位
( メートル基本系を使用 )
cm での表示
たとえば MD: POS_LIMT_PLUS
( 第 1 のソフトウェアリミット
1)
MD 10240:
Yes
*
MD 10230: SCALING_
FACTORS_USER_DEF
SCALING_SYSTEM
IS_METRIC
2)
スイッチプラス )
= + 999.999 cm
No
1)
2)
*
MD 10230: SCALING_
FACTORS_USER_DEF[n]
MD 10240: SCALING_SYSTEM_
IS_METRIC = 1
2)
MD 10230: SCALING_
MD 10220: SCALING_
MD 10220:
USER_DEF_MASK で選択
SCALING_USER_DEF_MASK で選択
( マシンおよび設定データに
( マシンおよび設定データに
USER_DEF_MASK = "H1"
ついてのみ有効 )
(16 進値としてのビット番号 0)
FACTORS_USER_DEF[0] =0,1;
MD 10220: SCALING_
3)
MD 10250:
*
SCALING_VALUE_INCH
+ 9999.999 mm
内部単位 [mm または度 ]
4)
MD 10200:
INT_INCR_PER_MM = 100
*
MD 10200: INT_INCR_PER_MM
または
MD 10200: INT_INCR_PER_DEG
( 計算分解能 )
"999999
内部インクリメント /(mm または度 )
( 小数以下の桁数が欠落 )
実位置分解能
(1 mm あるいは 1 度当たりの
速度指令
分解能
エンコーダインクリメント数 )
制御装置
* 4 (FM-NC 用 )
* 2048 (840D 用 )
* 128 (810D 用 )
* 掛算
モータ
エンコーダ
図 1.56 単位および分解能のブロック図
1-309
■ 入力/表示分解能,計算分解能
各分解能(直線位置および角度位置,速度,加速,ジャークなど)は,以下のよ
うに明確に区別する必要があります。
• 入力分解能。操作パネルまたはパートプログラムによって入力されるデータ入力。
• 表示分解能。操作パネルでのデータの表示。
• 計算分解能。操作パネルまたはパートプログラムによって入力されたデータの
内部表記。
入力/表示分解能は,使用する操作パネルによって決まります。また,位置値の
表示分解能は,MD 9004: DISPLAY_RESOLUTION ( 表示分解能 ) の設定によって
決まります。
SW5 以降では,MD 9011: DISPLAY_RESOLUTION_INCH を使用して位置値(イン
チ表記)の表示分解能を設定することができ,インチ設定で小数以下 6 桁までの
表示が可能です。
パートプログラムのプログラミングには,プログラミングガイド記載の入力分解
能を使用してください。
設定したい計算分解能は,MD 10200: INT_INCR_PER_MM ( 直線位置用の計算分解
能 ) および MD 10210: INT_INCR_PER_DEG ( 角度位置用の計算分解能 ) で定義さ
れます。これは,入力/表示分解能の影響を受けませんが,同じ分解能を使用し
てください。
パートプログラム内の位置値や速度などの小数以下の最大桁数,およびツールオ
フセット,ゼロオフセットなどの小数以下の桁数は(したがって最大可能精度の
小数以下の桁数も)計算分解能で定義されます。
プログラム値と計算分解能の積は整数値に切り上げられるため,角度位置および
直線位置の入力精度は,計算分解能に限定されます。
丸め処理を繰り返し実行しやすくするため,計算分解能を 10 の累乗の形で表わす
ことをお奨めします。
丸め処理の例
計算分解能 : 1000 incr. / mm
プログラムされたパス : 97.3786 mm
有効値 = 97.379 mm
1/
10
- μm 範囲内でのプログラミング例 :
• マシンの直線軸はすべて 0.1 ... 1000 μm の値範囲でプログラムされ,移動されるべきです。
⇒ 0.1 μm の精度に合わせるためには,計算分解能≧ 104 incr. /mm となるように
セットしなければなりません。
⇒ MD 10200: INT_INCR_PER_MM = 10000 [incr. / mm]:
⇒パートプログラムの例
N20 G0 X 1.0000 Y 1.0000 ;
軸は X=1.0000 mm,Y=1.0000 mm の位置へ移動
N25 G0 X 5.0002 Y 2.0003 ;
軸は X=5.0002 mm,Y=2.0003 mm の位置へ移動
1-310
■ マシンの物理量および設定データの正規化
物理量を有するマシンおよび設定データは,以下に示す入力/出力単位(メート
ル,インチのうち選択されているいずれかの基本系で)で表されます。
物理量 :
標準基本系の入力/出力単位 :
メートル
インチ
直線位置
1 mm
1 inch
角度位置
1 degree
1 degree
直線速度
1 mm/min
1 inch/min
角速度
1 rpm
1 rpm
直線加速度
1 m/sec2
1 inch/sec2
角加速度
1 rev/sec2
1 rev/sec2
直線ジャーク
1 m/sec3
1 inch/sec3
角度ジャーク
1 rev/sec3
1 rev/sec3
時間
1 sec
1 sec
1/s
1/s
1 mm/rev.
1 inch/rev.
1 mm
1 inch
1 degree
1 degree
位置コントローラ
サーボゲイン
回転フィード
レート
直線位置の
補正値
角度位置の
補正値
以下に示した単位は保存用に使用されます。制御装置は,選択されている基本系
に関係なく常にこれらの単位を内部的に使用します。
物理量 :
内部単位 :
直線位置
1 mm
角度位置
1 degree
直線速度
1 mm/sec
角速度
1 degree/sec
直線加速度
1 mm/sec2
角加速度
1 degree/sec2
直線ジャーク
1 mm/sec3
角度ジャーク
1 degree/sec3
時間
1 sec
位置コントローラ
サーボゲイン
1/s
回転フィード
レート
1 mm/degree
1-311
直線位置の
1 mm
補正値
角度位置の
1 degree
補正値
ユーザは,マシンおよび設定データに,他の入力/出力単位を定義することがで
きます。そのためには,新しく選択された入力/出力単位および内部単位が,MD
10220: SCALING_USER_DEF_MASK ( 正規化係数の起動 ) および MD 10230:
SCALING_FACTORS_USER_DEF[n] ( 物理量の正規化係数 ) で一致していることが
必要です。
マシンおよび設定データの
入力/出力分解能
入力/出力単位は標準基本系
(インチまたはメートル)と
一致しているか ?
No
ユーザ定義
MD 10220: SCALING_FACTORS_USER_DEF_MASK
MD 10230: SCALING_FACTORS_USER_DEF[n]
Yes
内部単位に変換
内部単位
以下が適用されます。
選択された入力/出力単位 =
MD: SCALING_FACTORS_USER_DEF[ n]* 内部単位
したがって選択された入力/出力単位は,MD 10230:
SCALING_FACTORS_USER_DEF[n] での内部単位(1 mm,1 degree,1 s)それぞ
れについて入力しなければなりません。
インデックス [n] については,1.8.4「■一般マシンデータ」で説明します。
1-312
例 1:
直線速度のマシンデータ入力/出力は,mm/min ( 初期設定 ) ではなく m/min で表
します。( 内部単位は mm/s)
⇒直線速度のスケーリング係数は標準設定と異なります。したがってビット番号 2
は MD 10220:SCALING_USER_DEF_MASK 内でセットしてください。
⇒ MD: SCALING_USER_DEF_MASK = ’H4’;
(16 進値としてのビット番号 2)
⇒スケーリング係数は以下の公式に従って計算されます。
⇒ MD : SCALING_FACTORS_USER_DEF[2] = 16.667
選択された入力/出力単位
内部単位
MD: SCALING_FACTORS_USER_DEF[ n] =
MD: SCALING_FACTORS_USER_DEF[n] =
m
1 min
1
mm
s
=
1000mm
60s
mm
1
s
1000
60
=
=
16.667;
インデックス 2 が,「物理量のスケーリング係数」リスト内の「直線速度」
を定義します。
例 2:
例 1 で行われた変更のほかに,直線速度の,マシンデータ入力/出力は,m/s2( 初
期設定 ) ではなく,ft/s2 で表されます。(内部単位は mm/s2)。
⇒ MD: SCALING_USER_DEF_MASK = ’H14 ’ ;( 例 1 から導かれた,16 進数として
のビット番号 4 および 2)
⇒ MD : SCALING_FACTORS_USER_DEF[n] =
1
1
ft
s2
mm
2
s
⇒ MD : SCALING_FACTORS_USER_DEF[4] = 304.8
12 * 25, 4
=
1
mm
s2
mm
s2
=
304.8;
インデックス 4 が,「物理量のスケーリング係数」リスト内の「直線速度」
を定義します。
1-313
■ メートル/インチ測定系
制御系は,メートル,インチどちらの計測でも操作可能です。初期設定は,MD:
10240 SCALING_SYSTEM_IS_METRIC ( メートル基本系 ) で定義されています。
MD でどちらに設定されているかにより,すべてのジオメトリ値はすべてメートル
またはインチのどちらかで表されます。ゼロオフセット,ツールオフセット,
FRAMES や,関連の表示装置などと同様,手動で行う設定,たとえば,ハンドル,
INC,JOG 送り速度などもすべてこの基本設定を基準とします。
SW 5 以降のエクステンション
SW 5 以降では,MD 10260: CONVERT_SCALING_SYSTEM=1 の設定で測定系の変
更がしやすくなります。
• "MACHINE" 操作領域で,MMC ソフトキーを使って測定系を変更できます。
• アクティブな NC データは,測定系が切換わると自ダイナミックに変換されま
す。
• データバックアップは現在の測定系識別子で実行されます。
• MD 10240: SCALING_SYSTEM_IS_METRIC の機能はリセットです。
• たるみ補正用の測定系は,MD 32711: CEC_SCALING_SYSTEM_METRIC で
セットします。
参照: 2.5 補正機能 (K3)
• 軸テーブルおよびソフトウェアカム用切換えポイントの位置合わせを行う際の
位置データの測定系は,MD 10270: POS_TAB_SCALING_SYSTEM でセットし
ます。
参照: 2.9 ポジションスイッチ (N3)
2.15 割出し軸 (T1)
1-314
■ パートプログラムによる基本系の変換
データ入力/出力で使用するメートルからインチへの変換係数は,MD 10250:
SCALING_VALUE_INCH ( インチへの切換え用変換係数 ) に入力します。MD
10250 を見るには,当社のパスワードが必要です(初期値 : 25.4)。初期値を変更す
ることにより,カスタマ別の測定系に制御を合わせることができます。
プログラミング時,G70/G71 に合ったワークピース関連の仕様であれば測定系を
切換えることができます。また,SW5 以降は G700/G710 にも対応しています。
G70/G71/G700/G710 に影響を受けるデータについては,プログラミングガイドに
説明があります。
初期設定 G70/G71/G700/G710 は,MD 20150: GCODE_RESET_VALUES[12] にある
G グループの初期設定でチャンネル別に定義することができます。
MMC ソフトキーを使って測定系を変更する場合(SW5 以降)
,これらの初期設定
は G700 または G710 に関する新しい測定系に合わせて自ダイナミックに初期化さ
れます。
軸別の MD 31200: SCALING_FACTOR_G70_G71 (G70/G71/G700/G710 がアクティブな場
合の変換値用係数 ) を設定すると,G70/G71/G700/G710 プログラミングに関するメート
ル,インチを切り換える変換用係数を自由に選択することができます ( 初期値 : 25.4)。
初期値を変更することにより,カスタマ別の測定系に制御を合わせることができます。
係数は,パートプログラムのプログラミングが初期設定と異なる場合のみ有効です。
1-315
例:
- 初期設定 : インチ ; (MD: SCALING_SYSTEM_IS_METRIC=0)
- パートプログラム :
N15 G70;
設定と初期設定との間にずれがないため,係数は無効です。
N20 G71;
係数は有効。
(G70/G71 で選択された ) 現在の設定と初期設定とが,任意の時間に同一であるこ
とも異なることもあり得ます。現在の設定はチャンネル別,初期設定はすべての
チャンネルに適用されます。
用途 :
このファンクションを使うと,たとえばメートル基本法を使用したままメートル
法のパートプログラム中で 1 インチのスレッドを加工することができます。ツー
ルオフセット,ゼロオフセットおよび送り速度はメートル法のままです。
マシンデータは,MD 10240: SCALING_SYSTEM_IS_METRIC ( メートル基本系 )
で選択された基本系で出力されます。
マシン座標,ツールデータ,ゼロオフセットは常に初期設定で表示され,ワーク
ピース座標は,現在の設定で表示されます。
プログラムインクリメントデータセット (ZO,ツールオフセット ) を,基本系と異
なる測定系でプログラムされた外部ソースからインポートする場合は,まず MD
10240: SCALING_SYSTEM_IS_METRIC で初期設定を変更する必要があります。
寸法情報(パス用の送り速度,位置決め軸など)を含むインタフェース信号の
PLC との間でやりとりする場合は常に選択された基本系で行われます。
SW 5 以降のエクステンション
G700/G710 では,G70/G71 の機能性が以下のように拡張されています。
1. フィードは,プログラムされた測定系で計算されます。
• G700: 長さパラメータ [inch]; 送り速度 [inch/min]
• G710: 長さパラメータ [mm]; 送り速度 [mm/min]
プログラムされたフィードはモーダルであるため,G70/G71/G700/G710 コマン
ドが引き続き実行された後もアクティブのままになります。送り速度を新しい
G70/G71/G700/G710 の内容に適用する場合は,プログラムし直すことが必要で
す。
2. パートプログラムで長さを規定しているシステム変数およびマシンデータは,
プログラムされた測定系で読み書きされます。
これにより,測定系の初期値に依存しないパートプログラムを採用することがで
きます。
パートプログラム内のマシンデータおよびシステム変数に対して G70 および G700
が及ぼす影響の比較 :
• G70: 基本系での読取り/書込み
• G700: プログラムされた測定系での読取り/書込み
1-316
例:
( パートプログラムはどちらもメートル法で使用
MD 1240: SCALING_SYSTEM_IS_METRIC=1)
N100 R1=0 R2=0
N120 G01 G70 X1 F1000
N130 $MA_LUBRICATION_DIST[X]=10
N140 NEWCONF
N150 IF ($AA_IW[X]>$MA_LUBRICATION_DIST[X])
N160 R1=1
N170 ENDIF
N180 IF ($AA_IW[X]>10)
N190 R2=1
N200 ENDIF
N210 IF ( (R1<>0) OR (R2<>0))
N220 SETAL(61000)
N230 ENDIF
N240 M30
(注)ブロック N120 で G70 が G700 に置き換わっている場合には,
アラーム 61000 は発生しません。
シンクロナイズドアクション
現在のパートプログラムの内容が,非同期トリガ状態に応じて任意にシンクロナ
イズドアクションの位置決め挙動を変化させることのないよう,処理時に測定系
を定義しておく必要があります。これは,シンクロナイズドアクションの位置決
め挙動を定義し,また定義し直すための唯一の方法です。
例 1:
N100 R1=0
N110 G0 X0 Z0
N120 WAITP(X)
N130 ID=1 WHENEVER $R1==1 DO POS[X]=10
N140 R1=1
N150 G71 Z10 F10
;Z=10 mm X=10 mm
N160 G70 Z10 F10
:Z=254 mm X=254 mm
N170 G71 Z10 F10
;Z=10 mm X=10 mm
N180 M30
1-317
例 2:
ここでは,G71 をシンクロナイズドアクションにプログラミングすることにより
定義されています。
N100 R1=0
N110 G0 X0 Z0
N120 WAITP(X)
N130 ID=1 WHENEVER $R1==1 DO G71 POS[X]=10
N140 R1=1
N150 G71 Z10 F10
;Z=10 mm X=10 mm
N160 G70 Z10 F10
:Z=254 mm X=10 mm (X は常に 10 mm)
N170 G71 Z10 F10
;Z=10 mm X=10 mm
N180 M30
G70/G71-G700/G710 の比較
以下が適用されます。
P:
プログラムされた測定系でデータの読取り/書込み
G:
計測の基本系でデータの読取り/書込み
(MD 10240: SCALING_SYSTEM_IS_METRIC)
R/W:
読取り/書込み
1-318
表 1.5 比較
G70/G71
G700/G710
パートプログラム
パートプログラム
R/W
R/W
表示,小数位 (WCS)
P/P
P/P
表示,小数位 (MCS)
G/G
G/G
送り速度
G/G
P/P
位置パラメータ X, Y, Z
P/P
P/P
補間パラメータ I, J, K
P/P
P/P
円半径 (CR)
P/P
P/P
極半径 (RP)
P/P
P/P
スレッドリード
P/P
P/P
プログラム可能な FRAME
P/P
P/P
設定可能な FRAMES
G/G
P/P
基本フレーム
G/G
P/P
外部ゼロオフセット
G/G
P/P
軸プリセットオフセット
G/G
P/P
作業エリア制限 (G25/G26)
G/G
P/P
プロテクションゾーン
P/P
P/P
ツールオフセット
G/G
P/P
長さ関連のマシンデータ
G/G
P/P
長さ関連の設定データ
G/G
P/P
長さ関連のシステム変数
G/G
P/P
GUD
G/G
G/G
LUD
G/G
G/G
PUD
G/G
G/G
R パラメータ
G/G
G/G
Siemens サイクル
P/P
P/P
ジョグ / ハンドルインクリメント係数
G/G
G/G
エリア
参照: /PG/, Chapter 12 "List of Addresses"
1-319
■ 基本系の手動切換え (SW 5 以降 )
一般情報
マシンオペレーションエリア内の MMC ソフトキーをアクティブすることにより,
マシン全体の測定系を変更することができます。切換えは以下の場合にのみ可能
です。
• MD 10260: CONVERT_SCALING_SYSTEM=1
• MD 20110: RESET_MODE_MASK のビット 0 がすべてのチャンネルでイネーブ
ルである場合
• すべてのチャンネルがリセット状態にある場合
• 軸が,JOG,DRF または PLC 制御で移動していない場合
• 一定研削ホイール円周速度 (GWPS) がアクティブでない場合
パートプログラム開始またはモード変更などのアクションは,切換え時間中は
ディスエーブルされます。
切換えができなかった場合は,ユーザインタフェースでメッセージによりその旨
が通知されます。こうした方法をとることにより,測定系に基づいて稼動してい
るプログラム内で,常に一貫したデータセットが確実に使用されます。
測定系の実際の切換えは,必要なマシンデータすべての書き込み,および書込み
後リセットでそれらをアクティブにすることにより,内部的に実行されます。
MD 10240: SCALING_SYSTEM_IS_METRIC とこれに対応する MD 20150:
GCODE_RESET_VALUES 内の G70/G71/G700/G710 設定は,常に構成チャンネルす
べてに対して自ダイナミックに切換わります。
MD 20150: GCODE_RESET_VALUES[12] の値は,G700 と G710 を交互にとります。
このプロセスは,現在セットされている保護レベルに関係なく実行されます。
(注)ソフトキーの使用および機能性は,互換マシンデータ MD
10260: CONVERT_SCALING_SYSTEM で設定することができ
ます。
システムデータ
測定系を変更すると,長さ関連のパラメータはすべて,現在の測定系から新しい
測定系へ自ダイナミックに変換されます。以下のものが変換されます。
• 位置
• 送り速度
• 加速度
• ジャーク
• ツールオフセット
• プログラム可能でセット可能な外部ゼロオフセットおよび DRF オフセット
• 補正値
• プロテクションゾーン
• マシンデータ
• ジョグおよびハンドル係数
1-320
切換え後は,上述のデータはすべて,1.8.2「■マシンの物理量および設定データ
の正規化」に説明されている物理量で使用できます。
決まった物理単位が定義されていないデータ,たとえば
• R パラメータ
• GUD ( グローバルユーザデータ )
• LUD ( ローカルユーザデータ )
• PUD ( プログラムグローバルユーザデータ )
• アナログ I/O
• FC21 を介してのデータ交換
などは,自ダイナミックに変換されません。この場合ユーザは MD 10240:
SCALING_SYSTEM_IS_METRIC の現在の測定系を考慮しておく必要があります。
現在の測定系の設定は“インチ法”信号 DB10.DBX107.7 を介して PLC で読み取るこ
「測定系変更カウンタ」の読み出しに使用します。
とができます。DB10.DBB71 は,
ユーザツールデータ
ユーザ定義用として
ツールデータ MD 18094: MM_NUM_CC_TDA_PARAM,
およびツールエッジデータ MD 18096: MM_NUM_CC_TOA_PARAM
そのほかマシンデータセットとして
• MD 10290: CC_TDA_PARAM_UNIT [MM_NUM_CC_TDA_PARAM]
• MD 10292: CC_TOA_PARAM_UNIT [MM_NUM_CC_TOA_PARAM]
が,採用されています。これらのマシンデータを使用して物理単位(1.8.4「デー
タの説明」を参照)を設定することができます。長さ関連のユーザ定義ツール
データはすべて,切換えの入力に従って新しい測定系へ自ダイナミックに変換さ
れます。
基準点
基準点は維持されますので,基準点アプローチを繰り返す必要はありません。
入力および計算分解能
入力および計算分解能は MD 10200: INT_INCR_PER_MM にセットされます。メー
トル法の初期設定値は 1000 (0.001 mm) です。インチ法の初期設定値は,0.0001 inch
です。
例:
1 inch = 25.4 mm → 0.0001 inch = 0.00254 mm = 2.54 μm
最後の 40 nm をプログラムし表現するには,値 100000 を MD 10200 に入力する必
要があります。
両方の測定系に同じ設定をするだけで,それほど精度を欠くことなく測定系を変
更できます。一度 MD 10200 が上のようにセットされると,測定系の切換えのため
に変更する必要がなくなります。
1-321
JOG およびハンドル係数
SW 5 以降では,MD 31090: JOG_INCR_WEIGHT は 両測定系に関する軸インクリ
メント係数を含む 2 つの値から構成されます。制御装置は,MD 10240:
SCALING_SYSTEM_IS_METRIC の設定に応じた正しい値を自ダイナミックに選
択します。
ユーザは,インストレーションおよびスタートアップ中に,たとえば最初の軸に必
要な 2 つのインクリメント係数を定義します。
• メートル法では : MD 31090: JOG_INCR_WEIGHT[0;AX1]=0.001 mm
• インチ法では : MD 31090: JOG_INCR_WEIGHT[1;AX1]=0.00254 mm = 0.0001
Inch
この定義により,MD 31090 はインチ/メートルの切換えのために変更する必要が
なくなります。
すべての内部位置は常に mm で表されるため,測定系に変更があった場合,JOG
で相対移動中に残った距離は累計されません。
データバックアップ
データセットのうち,制御装置から個別に読み出せて測定系に関連のあるデータ
を含むものには,読取り処理中,MD 10240: SCALING_SYSTEM_IS_METRIC に応
じてインチまたはメートルの(MD 10260: CONVERT_SCALING_SYSTEM の設定
によって)識別子が付きます。
これは,最初に読み出されたデータの測定系を記録します。
この情報は,アクティブなシステムとは異なる測定系を使用した制御系へデータ
セットが読み込まれないことを意図したものです。この場合,アラーム 15030 が
トリガされ,書込み処理は中断します。
言語命令もパートプログラム内で評価されるため,上記のようなオペレータエ
ラーに対して「プロテクト」をかけることもできます。したがって,メートル法
に基づいたデータしか含まれていないパートプログラムを,インチ法の測定系で
実行するというような誤操作を防ぐことができます。
アーカイブおよびマシンデータセットに下位への互換性があるため,MD 11220:
INI_FILE_MODE = 2 の設定をもつ古いソフトウェアバージョンでも,上で述べた
言語命令を含むデータセットを受け入れます。
(注)互換マシンデータ MD10260: CONVERT_SCALING_SYSTEM が
イネーブルの場合に限り,INCH/METRIC 命令が生成されます。
マシンデータの丸め処理
丸め処理の問題を解消するため,インチ測定系で書込むときは,長さ関連のマシ
ンデータは 1pm に丸められます (MD 10240: SCALING_SYSTEM_IS_METRIC=0 お
よび MD 10260: CONVERT_SCALING_SYSTEM=1)。
データバックアップが測定系から読み出されるとき,ASCII 変換の結果,精度が失わ
れますが,システム内へデータが戻されるときにこの処理によって修正されます。
1-322
■ FGROUP および FGREF (SW 5 以降 )
ツールまたはワークピース,あるいはその両方が回転軸によって移動する加工オ
ペレーション(回転チューブのレーザ加工など)では,通常の方法で効果的な加
工送り速度を ,F 値を介するパスフィードとしてプログラムできることが必要で
す。
このためには,関連する回転軸それぞれについて有効半径(基準半径)を規定し
なければなりません。この処理は,モーダル NC アドレスをプログラムすることに
より可能です。
FGREF[ < 軸名 > ] = 基準半径
基準半径の単位は,G70/G71/G700/G710 の設定により異なります。
パスフィードの計算に軸を含めるためには,関係する軸をすべて FGROUP コマン
ドで規定しておかなければなりません。
FGREF プログラミングがされていない挙動に確実な互換性をもたせるため,シス
テムの電源オンおよびリセット時に,係数 1 度 = 1 mm がアクティブになります。
これは基準半径 FGREF = 360mm / (2π) = 57.296 mm に対応しています。
この初期値は,アクティブな基本系 MD 10240:SCALING_SYSTEM_IS_METRIC,
および現在アクティブなインチ/メートル G コードには依存しません。
FGROUP の回転軸用送り速度加重の特徴
以下のコードに関して :
N100 FGROUP(X,Y,Z,A)
N110 G1 G91 A10 F100
N120 G1 G91 A10 X0.001 F100
ブロック N110 でプログラムされた F 値は,回転軸送り速度(度 /min)として求め
られます。また,ブロック N120 の送り速度加重は ,現在の設定がインチ/メー
トル法のいずれであるかにより,100 inch/min または 100 mm/min に決定されます。
この 2 ブロック実行の所要時間は,著しく異なる場合があります。
(注)そのブロック内でプログラムされているのが回転軸のみで
あっても,FGREF 加重は有効です。通常の F 値補間(度 /
min)は,基準半径が,FGREF の初期値(下記)に従って
セットされているときにのみあてはまります。
G71/G710 には : FGREF[A]=57.296
または
G70/G700 には : FGREF[A]=57.296/25.4
1-323
例:
以下に,移動距離およびパスフィードに及ぼす FGROUP の影響について例を挙げ
て説明します。
N100 R1=0
N110 FGROUP(X,A)
N120 G91 G1 G710 F100
; 送り速度 =100 mm/min または 100 度 /min
N130 DO $R1=$AC_TIME
N140 X10
; 送り速度 =100 mm/min 移動距離 =10 mm
;R1= 約 6 s
N150 DO $R2=$AC_TIME
N160 X10 A10
; 送り速度 =100 mm/min 移動距離 =14.14 mm
;R2= 約 8 s
N170 DO $R3=$AC_TIME
N180 A10
; 送り速度 =100 度 /min 移動距離 =10 度
;R3= 約 6 s
N190 DO $R4=$AC_TIME
N200 X0.001 A10
; 送り速度 =100 mm/min 移動距離 =10 mm
;R4= 約 6 s
N210 G700 F100
; 送り速度 =2540 mm/min または 100 度 /min
N220 DO $R5=$AC_TIME
N230 X10
; 送り速度 =2540 mm/min 移動距離 =254 mm
;R5= 約 6 s
N240 DO $R6=$AC_TIME
, 送り速度 =2540 mm/min 移動距離 =254.2 mm
N250 X10 A10
;R6= 約 6 s
N260 DO $R7=$AC_TIME
N270 A10
; 送り速度 =100 度 /min 移動距離 =10 度
;R7= 約 6 s
N280 DO $R8=$AC_TIME
N290 X0.001 A10
; 送り速度 =2540 mm/min 移動距離 =10 mm
:R8= 約 0.288 s
N300 FGREF[A]=360/(2*$PI)
;1 度 =1 inch
; 有効半径を通じてセット
N310 DO $R9=$AC_TIME
N320 X0.001 A10
; 送り速度 =2540 mm/min 移動距離 =254 mm
;R9= 約 6 s
N330 M30
1-324
(注)$AC_TIME 変数には,ブロック開始からの経過時間(秒)が
セットされていますが,これはシンクロナイズドアクション
でのみ使用可能です。
■ 指令値/実位置系
■ 一般事項
ブロック図
以下の構造を持つ制御ループは,すべての閉ループ制御軸/スピンドル用に構成
可能です。
閉じた
状態
速度セット
ポイント出力
速度セット
ポイント
ルーティング
モータ
CTRLOUT_TYPE=0 ( シミュレーション )
IS 位置制御 1/2
ENC_TYPE=0 ( シミュレーション )
エンコーダ
実位置処理
実際の
ルーティング
エンコーダ
実位置処理
図 1.57 制御ループのブロック図
指令出力
指令は各軸/スピンドルについて出力できます。指令値は,YS840DI ではデジタル
値としてアクチュエータに出力されます。
実位置の検出
各軸/スピンドルには,測定系を 2 つまで接続できます。たとえば,精度の高い
加工が要求される場合に使用する直接測定系と,高速位置決めタスク用の間接測
定系などです。
使用するエンコーダの数は MD 30200: NUM_ENCS ( エンコーダの数 ) に入力します。
実位置処理が 2 つに分岐している場合,実位置は両方の分岐箇所で取得されます。
位置決め制御,絶対値の計算および表示には,アクティブな測定系が常に使用さ
れます。PLC インタフェースにより両方の測定系が同時にアクティブになった場
合は,制御装置が位置決め測定系 1 を内部的に選択します。
1-325
基準点アプローチは,選択された測定系によって実行されます。位置測定系はす
べて個別に基準化されなければなりません。
実位置取得用の補正ファンクションの説明については,以下を参照してください。
参照: 2.5 補正機能 (K3)
エンコーダ監視ファンクションの説明については,以下を参照してください。
参照: 1.2 送り軸監視機能及びプロテクションゾーン (A3)
測定系の切換え
PLC インタフェース信号 "Position measuring system 1/2"(位置測定系 1/2)を介して
2 つの測定系を切換えることができます。以下を参照してください。
参照: 1.1 各種インタフェース信号 (A2)
測定系の切換えは随時行うことができ,切換えのために軸を静止させる必要はあ
りません。実位置と 2 つの測定系との間で許されるずれの程度を超えていない場
合に限り切換えることができます。関連する公差範囲は MD 36500:
ENC_CHANGE_TOL ( 位置実位置切換えの最大公差 ) でセットします。
測定系が変更されると,位置測定系 1 と 2 の間に生じる現在のずれは直ちに移動
されます。
実位置のずれが大きすぎる場合には,アラーム 25100 "Measuring system switchover
not possible" ( 測定系の切換え不可 ) が出力されるため,測定系は変更できません。
2 つの測定系の実位置間での許容されるずれを,MD 35510: ENC_DIFF_TOL に入
力する必要があります。2 つの測定系が周期的に比較される間に,公差設定を上回
るずれが発生しないようにしなければなりません。そのようなずれが起こると,
エラーメッセージが出されます。MD 35510=0,すなわち 軸に関して 2 つの測定系
がアクティブではない(実在しない)場合,または軸そのものが基準化されてい
ない(少なくとも閉ループ制御測定系はアクティブ)場合には,関連する監視
ファンクションはアクティブではありません。
実位置検出のタイプ
使用するエンコーダのタイプは MD 30240: ENC_TYPE ( 実位置検出のタイプ ( 位置
実位置 )) にプログラムされなければなりません。
1-326
シミュレーション軸
軸の速度制御ループはテスト用にシミュレートできます。実際の軸と同様,シ
ミュレーション軸は追従誤差を伴って“移動”します。
2 つのマシンデータ,MD 30130: CTRLOUT_TYPE[n] ( 指令出力モード ) および MD
30240: ENC_TYPE[n] ( 実位置検出タイプ ) を "0" に設定することにより,シミュ
レーション軸を設定できます。
標準マシンデータが読み込まれると直ちに該当の軸はシミュレーション軸となり
ます。
指令値および実位置は,基準点アプローチで基準点値にセットできます。
MD 30350: SIMU_AX_VDI_OUTPUT ( シミュレーション軸用軸信号の出力 ) をセッ
トして,シミュレーション処理中に軸別インタフェース信号を PLC へ出力するか
どうかを定義できます。
実位置の補正
位置制御用に選択されたエンコーダの NC が実行した実位置補正が,同じ軸に定義
された他のどのエンコーダの実位置にも影響を及ぼさないようにするためには,
MD 30242: ENC_IS_INDEPENDENT (依存しない)の設定により明示する必要が
あります。
実位置の補正には,以下の処理が含まれます。
• モジュロ処理
• 基準点アプローチ
• 測定系の較正
• プリセット
1-327
■ 速度指令値および実位置のルーティング
一般事項
速度指令値および実位置のルーティングには,以下の定義が必要です。
すべての軸/スピンドルに対して
• 第 1 の制御ループの割当て
• 可能ならば第 2 の制御ループの割当て
• 指令分岐の割当て
多重割当ても可能です。たとえば,いくつかの軸/スピンドルの制御を交互に行
うための位置実位置を取得するのに,制御ループを使用することができます。
ルーティングための前提条件
NC のマシン軸はすべて MD 10000: AXCONF_MACHAX_NAME_TAB[n] ( マシン軸
名 ) で明確に定義しておく必要があります。この名前は,システム(すべてのモー
ドグループおよびチャンネル)で一貫して使用されるものでなければなりません。
参照: 1.11 軸構成及び座標系 (K2)
ドライブ構成
「診断」操作領域の操作パネルを介して,ドライブの構成をすることができます。
各実在ドライブについて以下のマシンデータが自ダイナミックにパラメータ化さ
れます。
• MD 13010: DRIVE_LOGIC_NR[n] ( 論理ドライブ番号 )
• MD 13000: DRIVE_IS_ACTIVE[n] (SIMODRIVE 611D ドライブ起動 )
• MD 13030: DRIVE_MODULE_TYPE[n] ( モジュール識別 )
• MD 13040: DRIVE_TYPE[n] ( ドライブのタイプ識別 )
• MD 13020: DRIVE_INVERTER_CODE[n]
( ドライブモジュールの電源セクションコード )
マシンデータで使用されるインデックス [n] は,実在ドライブのスロット番号を表
します。電源オン時に,接続しているすべてのドライブモジュールに対して,NC
がこの番号を自ダイナミックに割当てます。インデックスは,最初のドライブバ
ス(第 1 の実在ドライブ)が "0" として割当てられ,ドライブの数が増えるに従っ
て数字が大きくなります。多重軸モジュールは,実在ドライブ番号が昇順に割当
てられます(左から右へカウント)。YS840DI は最初の 6 個のスロットが割当てら
れます ( インデックス 0-5)。DRIVE_LOGIC_NR ( 論理ドライブ番号 ) を使用して,
将来的に使用するモジュール用のワイルドカードを作成することもできます。
1-328
速度指令ルーティング
関連マシンデータのパラメータ化について説明します。
各指令分岐について,以下のマシンデータをパラメータ化する必要があります。
• MD 30100: CTRLOUT_SEGMENT_NR[n]
( 指令割当て : ドライブのタイプ ):
これを介して出力がアドレス指定されるバスセグメントの数をここで入力しま
す。バスセグメントは,YS840DI に恒久的に割当てられます。
- YS840DI は 1
- 2,3 は予備
• MD 30110: CTRLOUT_MODULE_NR[n]
( 指令割当て : ドライブ番号 / モジュール番号 ):
これを介して出力がアドレス指定される,バスセグメントのモジュール番号をこ
こで入力します。
- YS840DI では,軸モジュールの論理ドライブ番号を入力する必要があります
( 値の範囲 0 ~ 15)。
(MD 13010: DRIVE_LOGIC_NR[n] を介して )
• MD 30120: CTRLOUT_NR[n] ( 指令割当て : ドライブモジュール/モジュールへ
の指令出力 ):
指令出力番号をここで入力します。
- YS840DI は 1 ( 指令出力は常に出力 1 から )
• MD 30130: CTRLOUT_TYPE[n] ( 指令出力タイプ ):
速度指令の出力タイプをここで入力します。
0 : シミュレーション (HW 必要なし )
1 : 標準 (HW 構成に差異あり )
速度指令ルーティング用の MD のインデックス
指令ルーティング用のマシンデータのインデックス [n] は,0 です。
実位置ルーティング
関連マシンデータのパラメータ化について説明します。
各実位置分岐について,以下のマシンデータをパラメータ化する必要があります。
• MD 30210: ENC_SEGMENT_NR[n] ( 実位置割当て : ドライブのタイプ ):
これを介してエンコーダがアドレス指定されるバスセグメント番号をここで入
力します。バスセグメントは,YS840DI に恒久的に割当てられます。
- YS840DI は 1
- 2,3 は予備
• MD 30220: ENC_MODULE_NR[n]) ( 実位置割当て : ドライブのタイプ ):
これを介してエンコーダがアドレス指定される,バスセグメントのモジュール
数をここで入力します。
- YS840DI では,軸モジュールの論理ドライブ番号を入力します ( 値の範囲 0 15)(DRIVE_LOGIC_NR[n] にセット可 )。
1-329
• MD 30230: ENC_INPUT_NR[n]) ( 実位置割当て : ドライブモジュール/制御ルー
プモジュールへの入力 ):
位置実位置エンコーダが接続されている場所への入力番号をここで入力しま
す。
- YS840DI は 1 または 2 ( 上から下へカウント )
• MD 30240: ENC_TYPE[n] ( 実位置取得のタイプ ):
使用するエンコーダのタイプをここで入力します (1.8.4「データの説明」を参
照 )。
実位置ルーティング用の MD インデックス
実位置ルーティング用のマシンデータインデックスのコード [ エンコーダ番号 ]:
エンコーダ 1 には 0,エンコーダ 2 には 1
• 1 つのマシン軸の MD 30110: CTRLOUT_MODUL E_NR[n] および MD:
ENC_MODULE_NR[n] は,常に同じ論理ドライブ番号を有します。
YS840DI マシンデータパラメータ設定
実位置割当て
モータエンコーダ (X414) からの
第 1 軸実位置
MD 30220: ENC_MODULE_NR[0] = 7
MD 30230: ENC_INPUT_NR[0] = 1
直線スケール (X416) からの第 2 軸 MD 30220: ENC_MODULE_NR[1] = 7
MD 30230: ENC_INPUT_NR[1] = 2
実位置
エンコーダの数 :
MD 30200: NUM_ENCS = 2
実位置取得 1 のタイプ :
MD 30240: ENC_TYPE[0] = 1
実位置取得 2 のタイプ :
MD 30240: ENC_TYPE[1] = 1
MD 30110: CTRLOUT_MODULE_NR[0] = 7
MD 30120: CTRLOUT_NR[0] = 1
MD 13010: DRIVE_LOGIC_NR[3] = 7
MD 30130: CTRLOUT_TYPE[0] = 1
指令割当て
1-330
■ 速度指令出力と実位置の処理
送り軸の制御方向および移動方向
制御方向
ドライブの速度コントローラと電流コントローラを起動し最適化してから,位置
制御を起動してください。
以下の事項をまず明確にする必要があります。
• 送り軸の移動方向
実位置検出ファンクションの符号および位置制御の制御方向は,MD 32110:
ENC_FEEDBACK_POL[n] ( 極性実位置 ) で変更することができます。
移動方向
MD 32100: AX_MOTION_DIR ( 移動方向 ) で,位置制御の制御方向に影響を与える
ことなく軸の動作方向を反転させることができます。
YS840DI の速度調整
速度の調整は必要ありません。
最大速度指令
最大速度指令とは,ドライブに出力される最も高い値(最高速度(ドライブ - MD
1401: MOTOR_MAX_SPEED で調整可)
)です。MD 36210: を定義して,最大速度
指令をパーセント換算した速度指令を制限することができます。速度指令 100% が
最大速度指令を表します。
この制限を超えると,アラームが出力されます。
参照: 1.2 送り軸監視機能及びプロテクションゾーン (A3)
MD: CTRLOUT_LIMIT[n] および ドライブ - MD 1405: MOTOR_SPEED_LIMIT ( 速
度モータ監視 ) は一致しているものとします。
速度指令
最大速度指令値
MD 36210:
最大軸速度
MD 32000: MAX_AX_VELO
図 1.58 最大速度指令値
1-331
実位置フィードバック
位置フィードバック値の分解能
フルクローズド位置ループ制御が実現できるためには,有効な位置フィードバッ
ク分解能が制御系に伝えられなければなりません。
その情報を伝えるのが,以下の軸別マシンデータです ( 図 1.64 ~ 1.67 を参照 )。
制御装置は,MD の設定から位置フィードバック分解能を割り出します。
MD 31050: DRIVE_AX_RATIO_DENOM[n]
( 分母負荷側ギアボックス )
MD 31060: DRIVE_AX_RATIO_NUMERA[n]
( 分子負荷側ギアボックス )
MD 31070: DRIVE_ENC_RATIO_DENOM[n]
( 分母エンコーダ側ギアボックス )
MD 31080: DRIVE_ENC_RATIO_NUMERA[n]
( 分子エンコーダ側ギアボックス )
MD 31010: ENC_GRID_POINT_DIST[n]
( リニアスケール上の原点信号間の
距離 )
MD 34320: ENC_INVERS[n]
( リニアスケール反転接続 )
MD 31040: ENC_IS_DIRECT[n]
( エンコーダがマシンに直結 )
MD 31000: ENC_IS_LINEAR[n]
( エンコーダがリニアスケール )
MD 31020: ENC_RESOL[n]
( エンコーダパルス数 )
MD 30300: IS_ROT_AX
( 回転軸 )
MD 31030: LEADSCREW_PITCH
( ボールネジのピッチ )
MD 32000: MAX_AX_VELO
( 最大軸速度 )
MD 30200: NUM_ENCS
( エンコーダの数 )
マシンデータインデックス [n] のコード :
- MD: DRIVE_AX_...[ 制御パラメータセット番号 ] : 0 ~ 5
- 残りの MD [ エンコーダ番号 ] : 0 または 1
1-332
軸のタイプ(直線軸,回転軸)および位置フィードバック取得のタイプ(直接,
間接)により,以下のマシンデータをパラメータ化して実位置分解能を求めるこ
とが必要となります。
マシンデータ
直線軸
MD 30300: IS_ROT_AX
MD 31000: ENC_IS_LINEAR[n]
MD 31010: ENC_GRID_POINT_DIST[n]
MD 34320: ENC_INVERS[n]
直線軸
回転軸
リニアスケール
モータ側の
エンコーダ
マシン側の
エンコーダ
モータ側の
エンコーダ
マシン側の
エンコーダ
0
0
0
1
1
1
スペーシング
反転
0
-
0
-
0
-
0
-
MD 31040: ENC_IS_DIRECT[n]
-
0
1
0
1
MD 31020: ENC_RESOL[n]
-
Marks/rev
Marks/rev
Marks/rev
Marks/rev
MD 31030: LEADSCREW_PITCH
-
mm/rev.
mm/rev.
-
MD 31080: DRIVE_ENC_RATIO_NUMERA[n]
-
モータ回転量
スピンドル回転量
モータ回転量
負荷回転量
MD 31070: DRIVE_ENC_RATIO_DENOM[n]
-
エンコーダ
回転量
エンコーダ
回転量
MD 31060: DRIVE_AX_RATIO_NUMERA[n]
-
MD 31050: DRIVE_AX_RATIO_DENOM[n]
-
エンコーダ回転量 エンコーダ回転量
モータ回転量
-
モータ回転量
(注)参照
シャフト回転量
-
負荷回転量
(注)参照
- はこの組合わせに当てはまらないことを意味します。
(注)これらの MD は,エンコーダのマッチング(起軸評価)には
必要ありませんが,指令計算のために正確に入力しなければ
なりません。そうしなければ,必要なサーボゲイン (KV) 係数
がセットされません。
負荷回転量を DRIVE_AX_RATIO_DENOM に,モータ回転量
を DRIVE_AX_RATIO_NUMERA に入力します。
リニアスケールを使用した直線軸
テーブル
シャフト
直線スケール
負荷側
ギアボックス
( 直線エンコーダ )
( 反転 )
図 1.59 直線スケールを使用した直線軸
実位置分解能を計算分解能に対応させるために,制御装置は "internal increments/
mm"(内部の 1 mm 当たりのインクリメント数)と "encoder increments/mm"(エン
コーダの 1 mm 当たりのインクリメント数)から商を以下のように計算します。
内部のインクリメント数 / mm
エンコーダのインクリメント数 / mm
1-333
=
ENC_GRID_POINT_DIST[ n]* INT_INCR_PER_MM
内部掛算係数
モータ側にロータリエンコーダを使用した直線軸
n
エンコーダ
テーブル
スピンドル
エンコー
ダ側ギア n
ボックス モータ
負荷ギア
ボックス
n
スピンドル
モータ回転量
スピンドル回転量
モータ回転量
シャフト回転量
図 1.60 モータ上にロータリエンコーダを使用した直線軸
実位置分解能を計算分解能に対応させるために,制御装置は "internal increments/
mm"(内部の 1 mm 当たりのインクリメント数)と "encoder increments/mm"(エン
コーダの 1 mm 当たりのインクリメント数)から商を以下のように計算します。
内部インクリメント / mm
1
=
エンコーダインクリメント / mm
ENC_RESOL[ n]* 内部掛算係数
* DRIVE_ENC_RATIO_NUMERA[
n]
DRIVE_ENC_RATIO_DENOM[ n]
n]
DRIVE_AX_RATIO_NUMERA[ n]
* DRIVE_AX_RATIO_DENOM[
* LEADSCREW_PITCH
* INT_INCR_PER_MM
例:モータ側にロータリエンコーダ (17 ビット ) を使用した直線軸 ; 内部掛算係数
(2048),
ギア設定 :
モータ/リードスクリュー 5,
ピッチ 10 mm,
10000 インクリメント /mm
⇒ MD 30300: IS_ROT_AX = 0
MD 31000: ENC_IS_LINEAR[0] = 0
MD 31040: ENC_IS_DIRECT[0] = 0
MD 31020: ENC_RESOL[0] = 217/2048 = 64
MD 31030: LEADSCREW_PITCH = 10
MD 31080: DRIVE_ENC_RATIO_NUMERA[0] = 1
MD 31070: DRIVE_ENC_RATIO_DENOM[0] = 1
MD 31060: DRIVE_AX_RATIO_NUMERA[0] = 5
MD 31050: DRIVE_AX_RATIO_DENOM[0] = 1
MD 10200: INT_INCR_PER_MM = 10000
1-334
⇒
1
217
内部インクリメント数 / mm
=
エンコーダのインクリメント数 / mm
*
1
1
*
1
5
* 10mm * 10000 インクリメント ./ mm
結果 : 1 エンコーダインクリメントは,0.381470 インクリメント(内部単位)に相
当します。
マシン側にロータリエンコーダを使用した直線軸
テーブル
シャフト
エンコーダ
側ギア
ボックス
n
負荷側
ギア
ボックス
スピンドル
n
エンコーダ
シャフト回転量
エンコーダ回転数
図 1.61 マシン上にロータリエンコーダを使用した直線軸
実位置分解能を計算分解能に対応させるために,制御装置は "internal increments/
mm"(内部の 1 mm 当たりのインクリメント数)と "encoder increments/mm"(エン
コーダの 1 mm 当たりのインクリメント数)から商を以下のように計算します。
内部インクリメント / mm
エンコーダインクリメント / mm
=
1
ENC_RESOL[ n]* 内部掛算係数 (2048)
* DRIVE_ENC_RATIO_NUMERA[ n]
DRIVE_ENC_RATIO_DENOM[ n]
* LEADSCREW_PITCH
* INT_INCR_PER_MM
1-335
モータ側にロータリエンコーダを使用した回転軸
n
エンコーダ
n
負荷
負荷ギア
ボックス
計測ギア
ボックス
n
回転テーブル
モータ回転数
モータ
負荷回転数
モータ回転数
スピンドル回転数
図 1.62 モータ上にロータリエンコーダを使用した回転軸
実位置分解能を計算分解能に対応させるために,制御装置は "internal increments/
degree"(内部の 1 度当たりのインクリメント数)と "encoder increments/degree"(エ
ンコーダの 1 度当たりのインクリメント数)から商を以下のように計算します。
内部インクリメント / 度
エンコーダインクリメント / 度
=
360 度
ENC_RESOL[ n]* 内部掛算係数 (2048)
* DRIVE_ENC_RATIO_NUMERA[ n]
DRIVE_ENC_RATIO_DENOM[ n]
* DRIVE_AX_RATIO_DENOM[ n]
DRIVE_AX_RATIO_NUMERA[ n]
* INT_INCR_PER_DEG
1-336
例
モータ上にロータリエンコーダ ( 20 ビット ) を使用した回転軸 ; 内部掛算係数
(2048),
ギア設定 :
モータ/回転軸 5,
1000 インクリメント / 度
⇒ MD 30300: IS_ROT_AX = 1
MD 31000: ENC_IS_LINEAR[0] = 0
MD 31040: ENC_IS_DIRECT[0] = 0
MD 31020: ENC_RESOL[0]=220/2048 = 512
MD 31080: DRIVE_ENC_RATIO_NUMERA[0] = 1
MD 31070: DRIVE_ENC_RATIO_DENOM[0] = 1
MD 31060: DRIVE_AX_RATIO_NUMERA[0] = 5
MD 31050: DRIVE_AX_RATIO_DENOM[0] = 1
MD 10210: INT_INCR_PER_DEG = 1000
⇒
内部インクリメント数 / 度
=
エンコーダのインクリメント数 / 度
360 度
220
*
1
1
*
1
5
* 1000 インクリメント ./ 度 = 0.017166
結果 : 1 エンコーダインクリメントは,0.068665 インクリメント(内部単位)に相
当します。
マシン側にロータリエンコーダを使用した回転軸
n
負荷
回転テーブル
n
エンコーダ
負荷回転量
エンコーダ回転量
負荷側ギアボックス
エンコーダ側ギアボックス
図 1.63 マシン上にロータリエンコーダを使用した回転軸
実位置分解能を計算分解能に対応させるために,制御装置は "internal increments/
degree"(内部の 1 度当たりのインクリメント数)と "encoder increments/degree"(エ
ンコーダの 1 度当たりのインクリメント数)から商を以下のように計算します。
1-337
内部インクリメント / 度
エンコーダインクリメント / 度
=
360 度
ENC_RESOL[ n]* 内部掛算係数 (2048)
* DRIVE_ENC_RATIO_NUMERA[ n]
DRIVE_ENC_RATIO_DENOM[ n]
* INT_INCR_PER_DEG
1-338
■ 閉ループ制御
一般事項
軸の閉ループ制御には,ドライブの電流制御ループと速度制御ループ,さらに NC
でのハイレベル位置制御があります。
補間器からの位置
指令値
i
nset
電流
コント
ローラ
速度
コント
ローラ
位置
コント
ローラ
n
位置実位置
set
i
act
モータ
エンコーダ
act
図 1.64 軸の閉ループ制御のブロック図
基本ファンクションの軸/スピンドル閉ループ制御を下図に示します。
ファイン
インターポ
レーション
ジャーク制限
ダイナミッ
フィード
フォワード
制御
閉ループ制御
速度セット
ポイント処理
インタフェース信号 : 位置測定系 1/2
実位置処理
図 1.65 位置閉ループ制御の概略図
ジャーク制限の説明については以下を参照してください。
参照: 1.4 加減速制御 (B2)
フィードフォワード制御,バックラッシュ補正,およびピッチエラー補正の説明
については,以下を参照してください。
参照: 2.5 補正機能 (K3)
1-339
ファインインターポレーション
ファインインターポレーション (FIPO) は,補間制御サイクルの指令(一般に遅い)
を高い位置制御サイクルに調整するために使用されます。
さらに,ファインインターポレーションは(速度指令レベルのステップ的変化を
減少させることによって)輪郭の質を向上させます。
ファインインターポレーションには次の 2 つのタイプがあります。
1 : ディファレンシャルファインインターポレーション
2 : キュービックファインインターポレーション
ディファレンシャルファインインターポレーションは,サイクル調整を行い,補
間サイクルから平均値(平滑化)を割り出します。
キュービックファインインターポレーションは,サイクル調整を行い,最適な輪
郭精度を生み出します。
MD: FIPO_TYPE ( ファインインターポレーションのタイプ ) で,シミュレーショ
ン中に軸別インタフェース信号を PLC へ出力するかどうかを定義できます。
ダイナミック応答マッチング
ダイナミック応答マッチングは,異なるサーボゲイン係数をもつ軸に対して同じ
追従偏差をセットするためのものです。これにより,制御の質を損なうことなく,
互いに補間する軸に対して最適な形状精度を得ることができます。各軸は高い
サーボゲイン係数を維持するので,軸の乱れを効果的に抑止できます。
このファンクションは,MD 32900: DYN_MATCH_ENABLE (ダイナミックマッチ
ング)で起動します。
これらの軸は MD 32910: DYN_MATCH_TIME[n] (ダイナミック適合の時定数)で
マッチングされます。この MD を使用して,高い Kv 係数をもつ軸の位置制御ルー
プの等価時定数を,最も低い値の Kv 係数をもつ軸にマッチングさせます。
マシンデータのインデックス [n] は以下のとおり。
[ 制御パラメータセット番号 ]: 0 ~ 5
「最も遅い」制御ループの等価時定数と関連軸の定数との差を,
DYN_MATCH_TIME[n]n で入力する必要があります。
軸の位置制御ループの等価時定数は,次の公式によって求められます。
1
T
equivalent =
MD 32200: POSCTRL_GAIN ( [1 / s] に換算)[sec]
(注)1 つのジオメトリ軸に対してダイナミック適合を実行した場
合,その他すべてのジオメトリ軸に対しても同様に起動しな
ければなりません。これは,同じダイナミック応答 (MD
32900=1) を得るために必要となります。
1-340
位置制御
等価時間 軸 2
ループの
等価時間
ステップ応答
軸1
[ACHSE 1]
高いサーボゲインおよび
ダイナミック適合をもつ軸
高いサーボ
ゲインを
低いサーボゲインをもつ軸 2
図 1.66 ダイナミックマッチング
軸 1,2,3 のダイナミックマッチング例 ( 速度フィードフォワード制御なし ):
位置制御ループの等価時定数が以下の場合。
• 軸1:
30 ms
• 軸2:
20 ms
• 軸3:
24 ms
⇒ 軸 1 が最も遅い軸となります。
⇒ MD 32910: DYN_MATCH_TIME[n] 用の値設定
したがって ( ダイナミックマッチングの時定数 ) は以下のようになります。
• Axis 1 : 0 ms
• Axis 2 : 10 ms
• Axis 3 : 6 ms
1-341
サーボゲイン係数
軌跡のずれを防止するには,MD 32200: POSCTRL_GAIN[n] でサーボゲイン係数を
高く設定することが必要です。
しかし,Kv 係数が高すぎると安定性を欠き,また,オーバシュートやマシンに許
容範囲を超えた負荷をかける結果を招きます。
最大許容 Kv 係数は,以下によって異なります。
• ドライブの設計および動作性(立ち上がり時間,加速および減速性能 )
• マシンの性能 ( 弾性,振動抑制力 )
• 位置制御サイクル
Kv 係数は以下のように定義されます。
KV =
速度
追従誤差
;
[ m / min]
[ mm]
[ m / min]
は,VDI 規格によるサーボゲイン係数の単位
[mm]
マシンデータのインデックス [n] のコードは以下のとおり。
[ 制御パラメータセット番号 ]: 0 ~ 5
YS840DI 用の Kv 係数の設定
参照: YS840DI 保守説明書
位置コントローラのパラメータセット
位置制御は 6 つの異なるパラメータセットを使用して行なうことができます。位
置制御は以下の目的で使用します。
- 運転中に変更されたマシンの特性(スピンドルのギアチェンジなど)に,
位置制御を素早く適応させる。
- タッピング運転中などに,ある軸の動作性を別の軸の動特性にマッチン
グさせる。
1-342
以下のマシンデータは,運転中にパラメータセットを切換えることにより変更で
きます。
MD 31050: DRIVE_AX_RATIO_DENOM[n]
( 分母負荷側ギアボックス )
MD 31060: DRIVE_AX_RATIO_NUMERA[n]
( 分子負荷側ギアボックス )
MD 32200: POSCTRL_GAIN[n]
(Kv 係数 )
MD 32800: EQUIV_CURRCTRL_TIME[n]
( フィードフォワード制御用電流制
御ループの等価時定数 )
MD 32810: EQUIV_SPEEDCTRL_TIME[n]
( フィードフォワード制御用速度制
御ループの等価時定数 )
MD 32910: DYN_MATCH_TIME[n]
(ダイナミックマッチング用の時定
数)
MD 36200: AX_VELO_LIMIT[n]
( 速度監視用のスレッシュホールド
値)
マシンデータインデックスのコーディング [n]:
[ 制御パラメータセット番号 ] : 0 ~ 5
主軸パラメータセット
主軸の場合,各ギアステージには固有のパラメータセットが割当てられています。
IS "Actual gear stage"(実際のギア状態)(DB31, ... DBX16.0 ~ 16.2) に応じて,適切
なパラメータセットが起動します。
実際のギアステージ
起動するパラメータセット
000
2 ( インデックス =1)
001
2 ( インデックス =1)
010
3 ( インデックス =2)
011
4 ( インデックス =3)
100
5 ( インデックス =4)
101
6 ( インデックス =5)
軸パラメータセット
- タッピングまたはねじ切りに関与しない軸に対しては,パラメータセッ
ト 1 ( インデックス = 0) が起動します。
- タッピングまたはねじ切りに関与する軸に対しては,現在の主軸のギア
状態で使用されているのと同じパラメータセットが起動します。
現在起動中のパラメータセットは,"Service axis" (サービス軸)画面のオペレー
ション領域に表示されます。
1-343
1.8.3 補足条件
なし
1.8.4 データの説明 (MD,SD)
■ 一般マシンデータ
10200
MD 番号
INT_INCR_PER_MM
(直線位置の計算分解能)
初期設定 : 1000
最小入力リミット : 0.000001
最大入力リミット : ***
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
MD: INT_INCR_PER_MM
プログラムされた値と計算分解能の積が整数値に丸められるため,直線位置入
力の精度は,計算分解能に制限されます。丸め処理を明確にするため,計算分
解能は 10 の累乗の形で表現してください。
アプリケーション例
高精度運転が要求される軸については,計算分解能を 1000 インクリメント /mm
より大きい値にすることができます。
10210
MD 番号
INT_INCR_PER_DEG
(角度位置の計算分解能)
初期設定 : 1000
最小入力リミット : 0.000001
最大入力リミット : ***
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
1 度あたりの内部インクリメント数を INT_INCR_PER_DEG に定義します。プロ
グラムされた値と計算分解能の積が整数値に丸められるため,直線位置入力の精
度は,計算分解能に制限されます。丸め処理を明確にするため,計算分解能は
10 の累乗の形で表現してください。
アプリケーション例
高分解能を持つ回転軸については,計算分解能を 1000 インクリメント / 度 より
大きい値に変更することができます。
1-344
10220
MD 番号
初期設定 : 200
SCALING_USER_DEF_MASK
(スケーリング係数の起動)
最小入力リミット : 0
変更が有効になるための条件 : 保護レベル : 2
電源オン
最大入力リミット : 17FF
単位 : 16 進
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
物理量を処理するマシンおよび設定データは,選択されている基本系(メート
ルまたはインチ)によって,あらかじめセットされた単位で表されます。
それぞれの物理量に対して他の入力/出力単位が使用される場合は,関連する
正規化係数が ( MD 10230: SCALING_FACTORS_USER_DEF[n] に入力された ) こ
のマシンデータで起動します。
ビットがセットされている場合 :
関連する物理量のデータ(リスト参照)は,
MD: SCALING_FACTORS_USER_DEF[n] で定義された単位に調整されます。
ビットがセットされていない場合 :
関連する物理量のデータは,以下に示す定義済みの単位(以下のリスト)
に調整されます。
割当てられた物理量 定義済みの単位 :
MD 10240: SCALING_SYSTEM_IS_METRIC
1
0
ビット番号
(16 進数値で表現 )
0 直線位置
1 mm 1 inch
1 角度位置 1 度 1 度
2 直線速度 1 mm/min
1 inch/min
3 角度速度
1 rpm 1 rpm
4 直線加速度 1 m/s 2
inch/es2
5 角加速度 1 rev./s2
1 rev./s2
3
6 直線ジャーク
1 m/s
inch/es3
7 角度ジャーク
1 rev./s 3
1 rev./s3
8 時間
1s
1s
9 位置制御サーボゲイン
1/s
1/s
10 回転送り速度
1 mm/rev.
1 inch/rev.
11 直線軸の補正値
1 mm
1 inch
12 角度をもつ軸の補正値
1度
1度
例 :SCALING_USER_DEF_MASK =’H3’; (16 進数でのビット番号 0 および 1 )
⇒直線位置および角度位置については,関連の MD:
SCALING_FACTORS_USER_DEF[n] に指定されているスケーリング係数が起動
します。
このマシンデータを変更した場合は,再起動することが必要です。再起動しな
ければ,物理単位で表現されている関連マシンデータが正しく調整されません。
以下の手順に従ってください。
• MD を手動で変更した場合
⇒再起動を行ったあと,関連するマシンデータに物理単位を入力します。
• マシンデータファイルを介して MD を変更した場合
⇒再起動を行ったあと,マシンデータファイルをロードし直します。これに
より,新しい物理単位が起動します。
マシンデータが変更されると,アラーム 4070 "Scaling machine data altered"
(スケーリングマシンデータ変更)が出力されます。
アプリケーション例
以下の直線速度の入力/出力は,cm/min で表されます。
SCALING_USER_DEF_MASK = ’H4’ (16 進数でのビット番号 2)
SCALING_FACTORS_USER_DEF[2] = 0.1666666667 (10/60)
関連性
MD 10230: SCALING_FACTORS_USER_DEF[n] ( 物理量のスケーリング係数 )
1-345
10230
MD 番号
SCALING_FACTORS_USER_DEF[n]
(物理量のスケーリング係数)
初期設定 : 1, 1, 1,1, 1, 1, 1, 1, 1,
1000/60, 1,1, 1
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
初期単位設定 (MD 10220:SCALING_FACTORS_USER_DEF_MASK にセットされた
ビット ) 以外の単位をもつ物理量の正規化係数は,この MD に入力します。係数は,
該当する物理量に内部的に使用される単位を表していなければなりません。
インデックス [n] 割当てられた物理量 内部単位
0 直線位置 1 mm
1 角度位置 1 度
2 直線速度 1 mm/s
3 角速度 1 度 /s
4 直線加速度 1 mm/s2
5 角加速度 1 度 /s2
6 直線ジャーク 1 mm/s3
7 角度ジャーク 1 度 /s3
8 時間 1 s
9 位置制御サーボゲイン 1/s
10 回転送り速度 1 mm/ 度
11 直線位置の補正値
1 mm
12 角度位置の補正値 1 度
スケーリング係数は,インデックス [0...12] の物理量に割当てられます。このマ
シンデータを変更した場合は,再起動することが必要です。再起動しなければ,
物理単位で表現されている関連マシンデータが,正しく調整されません。
以下の手順に従ってください。
• MD を手動で変更した場合
⇒再起動を行ったあと,関連するマシンに物理単位を入力します。
• マシンデータファイルを介して MD を変更した場合
⇒再起動を行ったあと,マシンデータファイルをロードし直します。これに
より,新しい物理単位が起動します。
マシンデータが変更されると,アラーム 4070 "Scaling machine data altered"
(スケーリングマシンデータ変更)が出力されます。
アプリケーション例
以下の角速度の入力/出力は,gon/min で表されます。
SCALING_FACTORS_USER_DEF_MASK = ’H8’; (16 進数でのビット番号 3)
SCALING_FACTORS_USER_DEF[3] = 0.01851852;
(400/360/60)[3]: 角速度のインデックス
関連性
MD 10220: SCALING_USER_DEF_MASK ( スケーリング係数の起動 )
1-346
10240
MD 番号
初期設定 : 1
SCALING_SYSTEM_IS_METRIC
(メートル基本系)
最小入力リミット : 0
変更が有効になるための条件 : 電 保護レベル : 2
源オン
最大入力リミット : 1
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
データ入力/出力用の直線物理量のスケーリングに制御装置が使用する基本
系を,この MD で定義します。
すべての関連データは,基本単位 1 mm,1 度 および 1 秒で保存されます。操
作パネルまたは外部装置のスケーリングでパートプログラムにアクセスする
場合,以下の単位が使用されます。
SCALING_SYSTEM_IS_METRIC = 1: mm でスケーリング mm, mm/min,
m/s2,
m/s3
mm/rev.
SCALING_SYSTEM_IS_METRIC = 0: inch でスケーリング inch, inch/min,
inch/s2
inch/s3
inch/rev.
選択された基本系により,直線軸用のプログラムされた F 値の表現方法も決
まります。
メートル法 インチ法
G94 mm/min inch/min
G95 mm/rev. inch/rev.
このマシンデータを変更した場合は,再起動することが必要です。再起動し
なければ,物理単位で表現されている関連マシンデータが,正しく調整され
ません。
以下の手順に従ってください。
• MD を手動で変更した場合
⇒再起動を行ったあと,関連するマシンに物理単位を入力します。
• マシンデータファイルを介して MD を変更した場合
⇒再起動を行ったあと,マシンデータファイルをロードし直します。これ
により,新しい物理単位が起動します。
マシンデータが変更されると,アラーム 4070 "Scaling machine data altered"
(スケーリングマシンデータ変更)が出力されます。
アプリケーション例
メートル法でインストレーションを行い,インチ法に変換。
例外,エラー
1 mm から 1 inch への変換係数は,MD 10250: SCALING_VALUE_INCH の設定
で変更可能です。
1-347
10250
MD 番号
SCALING_VALUE_INCH
(インチ法への切換え用変換係数)
初期設定 : 25,4
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件:
電源オン
保護レベル : 1
単位 : -
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
データ入力/出力をメートル法からインチ法へ切換える変換係数を,この MD で
入力します。
この係数は,インチ基本系が選択されている
(MD 10240: SCALING_SYSTEM_IS_METRIC = 0) 場合にのみ,以下の変換につい
て有効となります。
- 直線軸のプログラムされた F 値
- 長さ関連の入力/出力および直線データ
( マシンデータ,ゼロオフセットなど )
G70/G71 でプログラムされた寸法系が選択された基本系
(SCALING_SYSTEM_IS_METRIC) と異なる場合,プログラムされたジオメトリ
軸位置はこの係数で変換されます。
G70/G71 でプログラムされた寸法系が選択された基本系
(SCALING_SYSTEM_IS_METRIC) と異なる場合,プログラムされた同期軸位置
は適切な軸係数 (MD 31200: SCALING_FAKTOR_G70_G71) を介して変換されま
す。操作インタフェースにある単位の補正画面は初期値でのみ動作可となるた
め,初期設定値の 25.4 と異なる値で設定するのは特殊な場合に限られます。
このマシンデータを変更した場合は,再起動することが必要です。再起動しなけ
れば,物理単位で表現されている関連マシンデータが正しく調整されません。
以下の手順に従ってください。
• MD を手動で変更した場合
⇒再起動を行ったあと,関連するマシンに物理単位を入力します。
• マシンデータファイルを介して MD を変更した場合
⇒再起動を行ったあと,マシンデータファイルをロードし直します。
これにより,新しい物理単位が起動します。マシンデータが変更されると,ア
ラーム 4070 "Scaling machine data altered" (スケーリングマシンデータ変更)が出
力されます。
アプリケーション例
インストレーションのあと,寸法系をメートル法から,インチ法またはカスタマ
別の寸法系へ変更する場合,この変換係数を使用します。マシンデータをはじめ
とするすべての入力値はこの係数によって変換され,変換後の値が次の読み出し
時または操作インタフェースに出力されます。
関連性
MD 10240: SCALING_SYSTEM_IS_METRIC
1-348
10260
MD 番号
CONVERT_SCALING_SYSTEM
(基本系の切換えがアクティブ)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 5
意味 :
このマシンデータが MD 10240:SCALING_SYSTEM_IS_METRIC の操作を定義し
ます。
MD 10260=0: SW 1 から SW 4.4 と互換のあるインチ/メートル応答
MD 10260=1: SW 5 以降と互換のあるインチ/メートル応答
SW 5 以降で拡張されている機能性
• MMC ソフトキーが使用可
• インチ/メートル法の切換え時に,NC データの自動変換可
• データバックアップで INCH/METRIC 命令使用可
• MD 10240: SCALING_SYSTEM_IS_METRIC の範囲は RESET
• MD 32711: CEC_SCALING_SYSTEM_METRIC ( たるみ補正 ) の機能性
アプリケーション例
このマシンデータを使用して,新しいインチ/メートル法の機能性を構成でき
ます(SW 5 以降)。
関連性
MD 10240: SCALING_SYSTEM_IS_METRIC
10290
MD 番号
CC_TDA_PARAM_UNIT
(CC(コンパイルサイクル)用ツールデータの物理単位)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 16
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 5
意味 :
ユーザ定義によるツール別データの物理単位は以下のとおりです。
0, // 単位なし
1, // 直線位置 [ mm ; inch ]
2, // 角度位置 [ 度 ; 度 ]
3, // 直線速度 [ mm/min ; inch/min ]
4, // 角速度 [ rev/min ; rev/min ]
5, // 直線加速度 [ m/s2 ; inch/s2 ]
6, // 角加速度 [ rev/s2 ; rev/s2 ]
7, // 直線ジャーク [ m/s3 ; inch/s3 ]
8, // 角度ジャーク [ rev/s3 ; rev/s3 ]
9, // 回転送り速度 [ mm/rev ; inch/rev ]
関連性
MD 18094: MM_NUM_CC_TDA_PARAM
1-349
10292
MD 番号
CC_TOA_PARAM_UNIT
(CC(コンパイルサイクル)用ツールエッジデータの物理単位)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 16
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 5
意味 :
ユーザ定義によるツールエッジデータの物理単位は以下のとおりです。
0, // 単位なし
1, // 直線位置 [ mm ; inch ]
2, // 角度位置 [ 度 ; 度 ]
3, // 直線速度 [ mm/min ; inch/min ]
4, // 角速度 [ rev/min ; rev/min ]
5, // 直線加速度 [ m/s2 ; inch/s2 ]
6, // 角加速度 [ rev/s2 ; rev/s2 ]
7, // 直線ジャーク [ m/s3 ; inch/s3 ]
8, // 角度ジャーク [ rev/s3 ; rev/s3 ]
9, // 回転送り速度 [ mm/rev ; inch/rev ]
関連性
13000
MD 番号
MD 18096: MM_NUM_CC_TOA_PARAM
DRIVE_IS_ACTIVE[n]
(ドライブの起動 (SIMODRIVE 611D))
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
SIMODRIVE 611D のドライブにのみ適用
この MD でドライブが起動/停止します。
1: ドライブがアクティブである
0: ドライブがアクティブではない
ドライブには指令がないので,監視は行われません。
このモジュールについての入力 [ フィードバック値 ] または出力 ( 指令値 ) は
設定できません。このモジュールは,ドライブバスの基本初期化中にのみ関
係します。
MD 13020:DRIVE_INVERTER_CODE, MD 13010: DRIVE_LOGIC_NR,MD
13030:DRIVE_MODULE_TYPE および MD 13040: DRIVE_TYPE は,パラメー
タ化される必要があります。
実在ドライブのスロット番号が,インデックス [n] として使用されます。[ ス
ロット番号 ] : 0 ~ 14 インデックスは,最初のドライブバス(= 第 1 の実在ド
ライブ)が "0" として割当てられ,ドライブの数が増えるに従って数字が大
きくなります。
アプリケーション例
テスト目的で実在ドライブを停止できます。
1-350
13010
MD 番号
DRIVE_LOGIC_NR[n]
(論理ドライブ番号)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 15
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
実在するすべてのドライブに「論理ドライブ番号」を割当てる必要がありま
す。このパラメータ設定により,論理ドライブ番号に関連するドライブバス
に接続されたモジュールの実際の順序づけが定義されます。
実在しないドライブモジュールには,論理ドライブ番号 "0" が割当てられま
す。したがって,ドライブバスのこの場所に将来的に設置されるモジュール
の位置を予備設定することができます。
論理ドライブ番号は,フィードバック値および指令値の割当て (MD 30220:
ENC_MODULE_NR[n],MD 30110: CTRLOUT_MODULE_NR[n]) に使用されま
す。
実在ドライブのスロット番号が,インデックス [n] として使用されます。[ ス
ロット番号 ] : 0 ~ 14 インデックスは,最初のドライブバス(= 第 1 の実在ド
ライブ)が "0" として割当てられ,ドライブの数が増えるに従って数字が大
きくなります。
各ドライブには,1 つの論理ドライブ番号を割当てなければなりません。
エラー発生時に,以下のアラームが出力されることがあります。
- Alarm 300001 "Drive number not possible"
(ドライブ番号が不適切)
- Alarm 300002 "Drive number defined several times"
(ドライブ番号の定義が重複)
- Alarm 300005 "At least 1 module too many on drive bus"
(ドライブバス上のモジュールが 1 つ以上超過)
- Alarm 300006 "At least 1 module too few on drive bus"
(ドライブバス上のモジュールが 1 つ以上不足)
1-351
13010
MD 番号
アプリケーション例
DRIVE_LOGIC_NR[n]
(論理ドライブ番号)
ルーティングの例 :
第 1 ドライブバス
ドライブのスロット番号
( 実際の順序 )
バス終端
論理ドライブ番号
マシン軸名
(AXCONF_MACHAX_NAME)
指令値割当て用識別子 :
フィードバック割当て用識別子 :
関連マシンデータ :
DRIVE_LOGIC_NR[0] = 1
DRIVE_LOGIC_NR[1] = 4
DRIVE_LOGIC_NR[2] = 2
DRIVE_LOGIC_NR[3] = 0
DRIVE_LOGIC_NR[4] = 0
DRIVE_LOGIC_NR[5] = 0
ENC_MODULE_NR[0,X] = 1 ( 第 1 エンコーダ )
ENC_MODULE_NR[0,Y] = 2
ENC_MODULE_NR[0,Z] = 4
CTRLOUT_MODULE_NR[0, X] = 1 ( 速度指令 )
CTRLOUT_MODULE_NR[0, Y] = 2
CTRLOUT_MODULE_NR[0, Z] = 4
注:
1 つのマシン軸の MD 30220: ENC_MODULE_NR[n] および
MD 30110:CTRLOUT_MODULE_NR[n] には,同じ論理ドライブ番号を割当て
なければなりません。
1-352
13030
MD 番号
DRIVE_MODULE_TYPE[n]
(モジュール識別子)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
モジュールタイプの識別子をこの MD に入力します。
1: 1 軸モジュール
2: 2 軸モジュール
9: デジタル/アナログ I/O 用の端子台
実在ドライブのスロット番号が,インデックス [n] として使用されます。
[ スロット番号 ] : 0 ~ 14 インデックスは,最初のドライブバス(= 第 1 の実
在ドライブ)が "0" として割当てられ,ドライブの数が増えるに従って数字
が大きくなります。
軸モジュールに誤ったモジュールタイプが割当てられると,アラーム 300003
"Wrong module type (1, 2 axis)" ( モジュールタイプが不正(1,2 軸)) が出力さ
れます。
13040
MD 番号
DRIVE_TYPE[n]
(ドライブタイプの識別子)
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
ドライブタイプ用の識別子をこの MD に入力します。
0: ドライブなし
1: FDD(フィードドライブ)
2: MSD(メインスピンドルドライブ)
3: 直線ドライブ
実在ドライブのスロット番号が,インデックス [n] として使用されます。
[ スロット番号 ] : 0 ~ 14
インデックスは,最初のドライブバス(= 第 1 の実在ドライブ)が "0" として
割当てられ,ドライブの数が増えるに従って数字が大きくなります。
ドライブに誤ったドライブタイプがプログラムされると,アラーム 300004
"Incorrect drive type (FDD, MSD, Linear drive)" (ドライブタイプ不正( FDD,
MSD,直線ドライブ)
)が出力されます。
1-353
■ 軸別マシンデータ
30100
MD 番号
CTRLOUT_SEGMENT_NR[n]
(指令割当て : ドライブタイプ)
初期設定:1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 0
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
これを介して出力がアドレス指定される,バスセグメントの数をこの MD に入力
します。制御系では,バスセグメントは固定的に割当てられます。
0: 予備
1: YS840DI 用ドライブバス
2: 予備
3: 予備
マシンデータのインデックス [n] のコードは以下のとおり。
[ 指令分岐 ]: 0
30110
MD 番号
CTRLOUT_MODULE_NR[n]
(指令割当て : ドライブ番号/モジュール番号)
初期設定 : 1,2,3,4,5,6,7,8
最小入力リミット : 1
最大入力リミット : 15
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
これを介して出力がアドレス指定される,バスセグメント内のモジュール数
をこの MD に入力します。
- MD 13010: DRIVE_LOGIC_NR[n] を介して論理ドライブ番号を入力する必要
があります。
マシンデータインデックス [n] のコード :
[ 指令分岐 ] : 0
30120
MD 番号
CTRLOUT_NR[n](指令割当て : ドライブモジュール/モジュールへの指令出
力)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 4
変更が有効になるための条件 :
電源オン
保護レベル : 0
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
値は常に 1 です。
マシンデータインデックス [n] のコード :
[ 指令分岐 ] : 0
1-354
30130
MD 番号
CTRLOUT_TYPE[n]
(指令の出力タイプ)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
速度指令出力タイプを,この MD に入力します。
0: シミュレーション ( ハードウェア必要なし )
1: 標準 ( ハードウェア構成に差異あり )
2: 予備
3: 直接指令出力のあるステッピングモータ ( ソフトウェア 4)
マシンデータのインデックス [n] は以下のコードをとります。
[ 指令分岐 ]: 0
アプリケーション例
30200
MD 番号
シミュレーション :
ドライブシステムが存在しなくても,マシンファンクションをシミュレートする
ことができます。
NUM_ENCS
(エンコーダの数)
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 2
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
実位置取得に使用する軸またはスピンドルのエンコーダ数をこの MD に入力し
ます。
この MD は,実位置取得が(モータ測定系ではなく)直接測定系で実行される
場合にのみ関係します。: NUM_ENCS = 2
30210
MD 番号
ENC_SEGMENT_NR[n]
(実位置割当て : ドライブタイプ)
初期設定 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 0
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
これを介してエンコーダがアドレス指定されるバスセグメントの数。
バスセグメントは,制御系に固定的に割当てられます。
0: 予備
1: ドライブバス
2: 予備
3: 予備
2,3 は,拡張用の予備
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ]: 0 または 1
1-355
30220
MD 番号
ENC_MODULE_NR[n]
(実位置割当て : ドライブモジュール番号/制御ループ番号)
初期設定 : 1, 2, 3, 4, 5, 6, 7, 8
最小入力リミット : 1
最大入力リミット : 15
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
これを介してエンコーダがアドレス指定されるバスセグメント内のモジュール数。
- MD: DRIVE_LOGIC_NR[n] に,論理ドライブ番号を入力する必要がありま
す。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ] : 0 または 1
関連性
30230
MD 番号
初期設定 : 1
MD: CTRLOUT_MODULE_NR[n]
( 指令割当て : ドライブ番号/モジュール番号 )
ENC_INPUT_NR[n]
(実位置割当て : ドライブモジュール/制御ループモジュールへの入力)
最小入力リミット : 1
最大入力リミット : 2
変更が有効になるための条件 : 電 保護レベル : 2
源オン
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
これを介してエンコーダがアドレス指定される,モジュールへの入力数をこ
こで入力します。
これにより,実位置取得に使用される入力が定義されます。
- 1 または 2 ( 上から下へカウント )
マシンデータのインデックス [n] のコードは以下のとおり。
[ エンコーダ番号 ] : 0 または 1
エンコーダが接続していない場所への出力が選択されると,アラーム 300008
"Control loop does not exist on drive" ( 制御ループがドライブ上にない ) がトリガ
されます。(YS840DI にのみ適用 )
図
入力 1
( 入力 1
または
2 によって,
1 または 2)
入力 2
2軸
1軸
ドライブモジュール
1-356
30240
MD 番号
初期設定 : 0
ENC_TYPE[n]
(実位置取得のタイプ(位置実位置)
)
最小入力リミット : 0
変更が有効になるための条件 : 電 保護レベル : 2/7
源オン
最大入力リミット : 5
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
使用するエンコーダのタイプをこの MD に入力します。
0: シミュレーション
1: 信号発生器(電圧,電流,EXE など ) (YS840DI のみ )
2: EnDat インタフェースを使用した絶対値エンコーダ
マシンデータのインデックス [n] のコードは以下のとおり。
[ エンコーダ番号 ] : 0 または 1
不正なエンコーダタイプが定義されると,アラーム 300009 "Wrong control loop
type drive [number], control loop [number]"(制御ループタイプドライブ [ 番号 ],
制御ループ [ 番号 ] が不正)が出力されます。
アプリケーション例
30242
MD 番号
シミュレーション
測定系が存在しなくても,マシンファンクションをシミュレートすることが
できます。
ENC_IS_INDEPENDENT[n]
(エンコーダは独立作動)
初期設定 : 0
最小入力リミット : ***
最大入力リミット : ***
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2/7
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 4.1
意味 :
位置制御のために選択されたエンコーダに対して,NC の行った実位置取得
が,同じ軸内で定義されている他のエンコーダの実位置に影響を及ぼさない
ようにする場合,位置制御エンコーダは「独立作動」であると宣言する必要
があります。
実位置の取得には,以下のものがあります。モジュロ処理,原点復帰,測定
系の校正,PRESET
アプリケーション例
MD 30200: NUM_ENCS[AX1] = 2
MD 30242: ENC_IS_INDEPENDENT[0, AX1] = 0
MD 30242: ENC_IS_INDEPENDENT[1, AX1] = 1
第 1 のエンコーダが,VDI インタフェースを介して位置制御に選択されてい
る場合,上記の実位置取得はこのエンコーダに限って行われます。第 2 のエ
ンコーダが,VDI インタフェースを介して位置制御に選択されている場合,
上記の実位置取得は両方のエンコーダに対して行われます。
したがって,このマシンデータは,VDI インタフェースを介して位置制御に
現在選択されていないエンコーダにのみ適用されます。
1-357
30350
MD 番号
初期設定 : 0
SIMU_AX_VDI_OUTPUT
(シミュレーション軸用の軸信号の出力)
最小入力リミット : 0
変更が有効になるための条件 : 電 保護レベル : 2
源オン
最大入力リミット : 1
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
このマシンデータは,軸のシミュレーション中に PLC に対して軸別インタ
フェース信号が出力されるかどうかを定義します。
1: シミュレートされた軸の軸別インタフェース信号が PLC に出力される。
こうすることにより,ドライブなしでも PLC プログラムをテストするこ
とができます。
0: シミュレートされた軸の軸別インタフェース信号が PLC に出力されない。
軸別インタフェース信号はすべてリセットされます。
この MD は次の場合は無意味
MD 30130: CTRLOUT_TYPE ( 指令値の出力タイプ ) = 1
アプリケーション例
MD: SIMU_AX_VDI_OUTPUT = 0
PLC ユーザプログラム
U DBX61.5 ; ( 位置コントローラアクティブ )
U DBX61.6 ; ( 速度コントローラアクティブ )
= A62.0 ; ( ブレーキ解除 )
これにより,軸のシミュレート中にブレーキが解除されないようにします。
31000
MD 番号
初期設定 : 0
ENC_IS_LINEAR[n]
(直接測定系(直線スケール))
最小入力リミット : 0
変更が有効になるための条件 : 電 保護レベル : 2
源オン
最大入力リミット : 1
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
MD = 1: 位置実位置取得に直線(リニアスケール)エンコーダを使用する
MD = 0: 位置実位置取得にロータリエンコーダを使用する
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ] : 0 または 1
参照
1.8.2「■ FGROUP および FGREF(SW5 以降)」
1-358
31010
MD 番号
ENC_GRID_POINT_DIST[n]
(リニアスケール上の基準マーク間の距離)
初期設定 : 0.01
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : mm
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
直線スケール上の基準マーク間の距離を,この MD に入力します。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ] : 0 または 1
参照
31020
MD 番号
1.8.2「■ FGROUP および FGREF(SW5 以降)」
ENC_RESOL[n]
(1 回転あたりのエンコーダパルス)
初期設定 : 2048
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
1 回転あたりのエンコーダパルス数を,この MD に入力します。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ] : 0 または 1
参照
31030
MD 番号
1.8.2「■ FGROUP および FGREF(SW5 以降)」
LEADSCREW_PITCH
(リードスクリューのピッチ)
初期設定 : 10
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : mm/rev.
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
リードスクリューのピッチをこの MD に入力します。
参照
1.8.2「■ FGROUP および FGREF(SW5 以降)」
1-359
31040
MD 番号
ENC_IS_DIRECT[n]
(エンコーダ取り付け位置)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
MD = 1: 実位置取得のためのエンコーダがマシンに直結している
MD = 0: 実位置取得のためのエンコーダがモータに接続している
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ] : 0 または 1
例外,エラー
不正な情報を入力すると,不正なエンコーダ分解能をもたらすことがあります。
これは,誤った情報により,不正なギア比が計算で使用されることなどにより
ます。
参照
1.8.2「■ FGROUP および FGREF(SW5 以降)
」
31050
MD 番号
DRIVE_AX_RATIO_DENOM[n]
(分母負荷ギアボックス)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2 147 000 000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
負荷ギアボックスの分母をこの MD に入力します。
マシンデータインデックス [n] のコード :
[ 制御パラメータセット番号 ] : 0 ~ 5
参照
31060
MD 番号
1.8.2「■ FGROUP および FGREF(SW5 以降)
」
DRIVE_AX_RATIO_NUMERA[n]
(分子負荷ギアボックス)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2 147 000 000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
負荷ギアボックスの分子をこの MD に入力します。
マシンデータインデックス [n] のコード :
[ 制御パラメータセット番号 ]: 0 ~ 5
参照
1.8.2「■ FGROUP および FGREF(SW5 以降)
」
1-360
31070
MD 番号
DRIVE_ENC_RATIO_DENOM[n]
(分母計測ギアボックス)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2147000000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
計測ギアボックスの分母をこの MD に入力します。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ]: 0 または 1
参照
31080
MD 番号
1.8.2「■ FGROUP および FGREF(SW5 以降)」
DRIVE_ENC_RATIO_NUMERA[n]
(分子計測ギアボックス)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2147000000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
計測ギアボックスの分子をこの MD に入力します。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ]: 0 または 1
参照
31200
MD 番号
1.8.2「■ FGROUP および FGREF(SW5 以降)」
SCALING_FACTOR_G70_G71
(G70/G71 アクティブ時の変換値用係数)
初期設定 : 25,4
最小入力リミット : -
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
インチ/ミリ変換用の変換係数をこの MD に入力します。G コードグループ
G70/G71 に使用するプログラム値が( MD: GCODE_RESET_VALUES[n] にセッ
トされた)初期設定値と異なる場合,プログラムされた軸のジオメトリ(位置,
多項式係数,円プログラミングの半径など)にこの係数を掛けます。
この係数は,位置決めだけを行う軸が G70/G71 に依存しないよう,各軸別に
セットすることができます。3 つのジオメトリ軸に対する係数は,同じ値を設定
してください。G70/G71 によって影響を受けるデータについては,プログラミン
グガイドに説明があります。
アプリケーション例
ミリ基本系 :
パートプログラム内で G71 ( インチ ) がプログラムされてアクティブになると直
ちに,それ以後の位置決め値はすべてこの MD に入力される係数でわり算され
たあと,内部ミリ法に変換されます。
インチ基本系 :
パートプログラム内で G70 ( メートル ) がプログラムされてアクティブになると
直ちに,それ以後の位置決め値はすべてこの MD に入力される係数でわり算さ
れたあと,内部インチ法に変換されます。
関連性
MD: GCODE_RESET_VALUES[n] (G グループ初期設定 )
1-361
32000
MD 番号
MAX_AX_VELO
(最大軸速度)
初期設定 : 10000
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : mm/min,
rev/min
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
軸が加速(高速移動制限)できる上限速度をこの MD に入力します。高速移動
がプログラムされている場合,この速度を使用します。
MD: IS_ROT_AX の設定によって,直線/回転軸最大速度をこの MD に入力します。
最大許容軸速度は,マシン,ドライブの動作,実位置取得のリミット周波数に
より異なります。
32100
MD 番号
初期設定 : 1
AX_MOTION_DIR
(移動方向)
最小入力リミット : -1
変更が有効になるための条件 : 電 保護レベル : 2
源オン
最大入力リミット : 1
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
この MD で,マシンの移動方向を反転できます。フィードバック極性は反転
しません。したがって,閉ループ制御は変動しません。
MD = +1: 通常の方向
MD = -1: 方向反転
MD = 0: 通常の方向
1-362
32110
MD 番号
ENC_FEEDBACK_POL[n]
(符号実位置(制御方向))
初期設定 : 1
最小入力リミット : - 1
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ :BYTE
適用開始 SW バージョン : 1.1
意味 :
ロータリエンコーダ信号の評価方向を,この MD に入力します。
-1: 方向反転
0, 1: 方向反転せず
方向が反転すると,位置制御にエンコーダを使用している場合には制御方向も
反転します。
入力 1 が使用されると,
⇒ MD: ENC_FEEDBACK_POL[n] は常に 1 になります。
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ]: 0 または 1
例外,エラー
制御方向を不正に入力すると,軸が衝突する恐れがあります。
セットされているリミット値によって,以下のアラームがトリガされます。
Alarm 25040 "Zero point monitoring"(ゼロ点監視)
Alarm 25050 "Contour monitoring"(輪郭監視)
Alarm 25060 "Speed setpoint limitation"(速度指令制限)
関連するリミット値については,以下を参照してください。
参照: 1.2 送り軸監視機能及びプロテクショ
ンゾーン (A3)
ドライブが接続されているときに制御できない指令ジャンプが発生した場合は,
選択された制御方向が不正であることが考えられます。
1-363
32200
MD 番号
POSCTRL_GAIN[n]
(サーボゲイン係数)
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 2000
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2/7
単位 : 1/s
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
位置コントローラゲイン,あるいはサーボゲイン係数
ユーザ用の入力/出力単位は [ (m/min)/mm]
したがって,POSCTRL_GAIN[n] = 1 は,V = 1m/min での追従誤差 1 mm に相当
します。標準選択済み入力/出力単位を内部単位 [rev/s] に合わせられるよう,
以下のマシンデータは初期設定値をもっています。
• MD 10230: SCALING_FACTORS_USER_DEF[9] = 16.666667
• MD 10220: SCALING_USER_DEF_MASK = ’H200’; (16 進数でのビット番号 9 )
値 "0" が入力されていれば,位置コントローラは開いています。
サーボゲイン係数を入力する場合,位置制御ループ全体のゲイン係数が制御系
の他のパラメータに依存した状態であるかどうかを確認することが重要です。
「設定したいサーボゲイン係数」(MD: POSCTRL_GAIN) と,(マシンが求めた)
実際のサーボゲインとが食い違うことがあります。制御ループの全パラメータ
がマッチングした場合に限り,これらのサーボゲイン係数は同じ値をとります。
これらの係数は,
- 速度指令調整 (MD 32260: RATED_VELO, MD 32250: RATED_OUTVAL)
- 速度エンコーダでのタコジェネ補正
- ドライブ上のタコジェネレータ
注:
互いに補間し合う軸は,同じゲイン設定(たとえば,同一速度で,同じ 45 度傾
斜の追従誤差)がされているか,または MD 32910: DYN_MATCH_TIME を介し
てマッチングしているかのどちらかが考えられます。
実際のサーボゲイン係数は,
(サービス画面の)追従誤差でチェックすることが
できます。
マシンデータインデックス [n] のコード :
[ 制御パラメータセット番号 ]: 0 ~ 5
1-364
32900
MD 番号
DYN_MATCH_ENABLE
(ダイナミックマッチング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
サーボゲイン係数の異なる軸を,MD:DYN_MATCH_TIME の同じ追従誤差に
セットできます。
1: ダイナミックマッチングがアクティブである
0: ダイナミックマッチングがアクティブではない
アプリケーション例
1.8.2「■速度指令値および実位置のルーティング」
関連性
MD 32900: DYN_MATCH_TIME[n] ( ダイナミック応答検出に使用する時定数 )
32910
MD 番号
DYN_MATCH_TIME[n]
(ダイナミックマッチングに使用する時定数)
初期設定 : 0.01
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2
単位 : s
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
軸のダイナミックマッチング時定数をこの MD に入力します。
「最も遅い」制御ループの等価時定数と関連する軸との差異を,ダイナミック
マッチングの時定数として入力します。
この MD は,MD: DYN_MATCH_ENABLE = 1 のときに限りアクティブです。
マシンデータインデックス [n] のコード :
[ 制御パラメータセット番号 ]: 0 ~ 5
アプリケーション例
1.8.2「■速度指令値および実位置のルーティング」
関連性
MD 32900: DYN_MATCH_ENABLE ( ダイナミックマッチング )
1-365
33000
MD 番号
FIPO_TYPE
(ファインインターポレーションのタイプ)
初期設定 : 2
最小入力リミット : 1
最大入力リミット : 2
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
ファインインターポレーションのタイプをこの MD に入力します。
1: ディファレンシャル補間器
2: キュービック補間器
補間器を増やすと計算時間および輪郭の品質が改善されます。
- キュービック補間器が標準です。
- フィードフォワードや位置制御ループを使用しない場合は,ディファレンシャ
ル補間器を使うと輪郭エラーの発生頻度がわずかに高まるものの,計算時間が
短縮できます。
- 位置制御サイクルおよび補間器サイクルが同じ場合は,どちらのファインイン
ターポレーションでも効果は同じです。
⇒微補間なし。
34320
MD 番号
ENC_INVERS[n]
(直線測定系が反転)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
増分測定系
- MD は意味を持ちません。
距離コード化測定系
- MD = 1: 測定系がマシン系に対して反転
- MD = 0: 測定系とマシン系は同方向
マシンデータインデックス [n] のコード :
[ エンコーダ番号 ]: 0 または 1
アプリケーション例
ファンクション説明の基準点アプローチ R1 を参照してください。
参照
1.8.2「■ FGROUP および FGREF(SW5 以降)
」
1-366
36210
MD 番号
CTRLOUT_LIMIT[n]
(最大速度指令)
初期設定 : 110
最小入力リミット : 0
最大入力リミット : 200
変更が有効になるための条件 :
NEW_CONF
保護レベル : 0/0
単位 : %
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
最大速度指令をパーセント換算して,この MD に入力します。
100 % が最大速度指令(アナログインタフェースで 10 V,ドライブでの最大
速度(ドライブ - MD 1401: MOTOR_MAX_SPEED でセット可能))に相当し
ます。
最大速度指令は,速度および電流コントローラに指令リミットがあればそれ
によって決定されます。
このリミットを超えると,アラームが発生し軸は停止します。
最大速度(高速移動)が実現できて,かつ関連する制御制限は維持できるよ
うなリミットを選択して下さい。
マシンデータのインデックス [n] のコードは以下のとおり。
[ 指令分岐 ]: 0
アプリケーション例
インストレーション中に,速度指令を下げる。
1-367
36500
MD 番号
ENC_CHANGE_TOL
(位置の実位置切換えのための最大公差)
初期設定 : 0.1
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件:
NEW_CONF
保護レベル : 2/7
単位 : mm, 度
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
両測定系の実位置間に生じる許容可能なずれを,この MD に入力します。
補正処理があまり大きくならないようにするために,閉ループ制御を使用する目
的で測定系を切換えるとき,この公差を超えないようにしてください。
これを超えると,エラーメッセージ 25100 "Axis %1 Measuring system switchover
not possible" ( 軸 1 測定系切換え不可 ) が出て,測定系は切り換わりません。
この MD は次の場合は無意味
MD 30200: NUM_ENCS = 0 または 1 のとき。
アプリケーション例
測定系の切換え時に,補正処理が大きくなり過ぎないようにする。
36510
MD 番号
ENC_DIFF_TOL
(測定系同期公差)
初期設定 : 0.0
最小入力リミット : 0.0
最大入力リミット : プラス
変更が有効になるための条件:
NEW_CONF
保護レベル : 2/7
単位 : mm, 度
データタイプ : DOUBLE
適用開始 SW バージョン : 4.2
意味 :
両測定系の各実位置間に生じる許容可能なずれ。
両測定系の周期比較中にこの公差設定を超えると,エラーメッセージが発生
します。関連する監視ファンクションは,両測定系が軸でアクティブではな
い/存在しないか,または軸そのものが基準化されない場合,MD 設定 が 0
でもアクティブになりません。( 少なくとも閉ループ制御測定系はアクティブ
です。)
1-368
1.8.5 信号の説明
なし
1.8.6 例
なし
1.8.7 データフィールド,リスト
■ マシンデータ
番号
識別子
名称
参照
操作パネル別 ($MM_ ... )
9004
DISPLAY_RESOLUTION
表示分解能
1.1(A2)
9010
SPIND_DISPLAY_RESOLUTION
スピンドル用表示分解能
1.1(A2)
9011
DISPLAY_RESOLUTION_INCH
インチ測定系の表示分解能
1.1(A2)
10000 AXCONF_MACHAX_NAME_TAB[n]
マシン軸名
1.11(K2)
10050 SYSCLOCK_CYCLE_TIME
システム基本サイクル
3.3(G3)
10070 IPO_SYSCLOCK_TIME_RATIO
補間器サイクル用係数
3.3(G3)
10060 POSCTRL_SYSCLOCK_TIME_RATIO
位置制御サイクル用係数
3.3(G3)
10080 SYSCLOCK_SAMPL_TIME_RATIO
実位置取得の位置制御サイクル用分割係数
3.3(G3)
10200 INT_INCR_PER_MM
直線位置用計算分解能
10210 INT_INCR_PER_DEG
角度位置用計算分解能
10220 SCALING_USER_DEF_MASK
スケーリング係数の起動
10230 SCALING_FACTORS_USER_DEF[n]
物理量のスケーリング係数
10240 SCALING_SYSTEM_IS_METRIC
メートル基本系
10250 SCALING_VALUE_INCH
インチ法切換え用変換係数
10260 CONVERT_SCALING_SYSTEM
基本系切換えアクティブ
10270 POS_TAB_SCALING_SYSTEM
位置テーブルの測定系
10290 CC_TDA_PARAM_UNIT
CC(コンパイルサイクル)用ツールデータの物
理単位
10292 CC_TOA_PARAM_UNIT
CC(コンパイルサイクル)用ツールエッジデー
タの物理単位
13000 DRIVE_IS_ACTIVE[n]
ドライブの起動
13010 DRIVE_LOGIC_NR[n]
論理ドライブ番号
13030 DRIVE_MODULE_TYPE[n]
モジュール識別子
13040 DRIVE_TYPE[n]
ドライブタイプの識別子
一般事項 ($MN_ ... )
2.15(T1)
チャンネル別 ($MC_ ... )
20150 GCODE_RESET_VALUES[n]
リセット G グループ
軸別 ($MA_ ... )
30100 CTRLOUT_SEGMENT_NR[n]
30110
CTRLOUT_MODULE_NR[n]
指令割当て : ドライブタイプ
指令割当て : ドライブ番号/モジュール番号
30120 CTRLOUT_NR[n]
指令割当て : ドライブモジュール/モジュールへ
の指令出力
30130 CTRLOUT_TYPE[n]
指令の出力タイプ
1-369
1.10(K1)
番号
識別子
名称
参照
30200
NUM_ENCS
エンコーダの数
30210
ENC_SEGMENT_NR[n]
実位置割当て : ドライブタイプ
30220
ENC_MODULE_NR[n]
実位置割当て : ドライブモジュール番号/制御
ループ番号
30230
ENC_INPUT_NR[n]
実位置割当て : ドライブモジュール/制御ループ
モジュールへの入力
30240
ENC_TYPE[n]
実位置取得のタイプ ( 位置実位置 )
30242
ENC_IS_INDEPENDENT
エンコーダは独立
30300
IS_ROT_AX
回転軸
30350
SIMU_AX_VDI_OUTPUT
シミュレーション軸用軸信号の出力
31000
ENC_IS_LINEAR[n]
直接測定系 ( 直線スケール )
31010
ENC_GRID_POINT_DIST[n]
直線スケール上の基準マーク間の距離
31020
ENC_RESOL[n]
分解能あたりのエンコーダパルス
31030
LEADSCREW_PITCH
リードスクリューのピッチ
31040
ENC_IS_DIRECT[n]
エンコーダがマシンに直結
31050
DRIVE_AX_RATIO_DENOM[n]
分母負荷ギアボックス
31060
DRIVE_AX_RATIO_NUMERA[n]
分子負荷ギアボックス
31070
DRIVE_ENC_RATIO_DEMON[n]
分母計測ギアボックス
31080
DRIVE_ENC_RATIO_NUMERA[n]
分子計測ギアボックス
31090
JOG_INCR_WEIGHT
INC/ ハンドル用インクリメントの加重
31200
SCALING_FACTOR_G70_G71
G70/G71 アクティブ時の変換値用係数
32000
MAX_AX_VELO
最大軸速度
32100
AX_MOTION_DIR
移動方向
32110
ENC_FEEDBACK_POL[n]
符号実位置 ( フィードバック極性 )
32200
POSCTRL_GAIN[n]
サーボゲイン係数
32450
BACKLASH[n]
バックラッシュ
2.5(K3)
32500
FRICT_COMP_ENABLE
摩擦補正アクティブ
2.5(K3)
32610
VELO_FFW_WEIGHT
速度フィードフォワード用フィードフォワード
制御係数
2.5(K3)
32650
AX_INERTIA
トルクフィードフォワード制御用慣性モーメント
2.5(K3)
32711
CEC_SCALING_SYSTEM_METRIC
たるみ補正の測定系
1.8(G2)
32800
EQUIV_CURRCTRL_TIME[n]
等価時定数 フィードフォワード制御用電流制御
ループ
2.5(K3)
32810
EQUIV_SPEEDCTRL_TIME[n]
等価時定数フィードフォワード制御用速度制御
ループ
2.5(K3)
32900
DYN_MATCH_ENABLE
ダイナミックマッチング
32910
DYN_MATCH_TIME[n]
ダイナミックマッチング用時定数
33000
FIPO_TYPE
ファインインターポレーションのタイプ
33620
FFW_MODE
フィードフォワード制御モード
2.5(K3)
33630
FFW_ACTIVATION_MODE
プログラムからフィードフォワード制御を起動
2.5(K3)
34320
ENC_INVERS[n]
直線測定系が反転
35100
SPIND_VELO_LIMIT
最大スピンドル速度
1.17(S1)
36200
AX_VELO_LIMIT[n]
速度監視用スレッシュホールド値
1.2(A3)
36210
CTRLOUT_LIMIT[n]
最大速度指令
36400
AX_JERK_ENABLE
軸ジャーク制限
1-370
2.12(R2)
2.4(H1)
1.4(B2)
番号
識別子
名称
36410 AX_JERK_TIME
軸ジャークフィルタ用時定数
36500 ENC_CHANGE_TOL
位置実位置切換え用最大公差
36510 ENC_DIFF_TOL
測定系同期公差
36700 ENC_COMP_ENABLE[n]
補間補正
■ アラーム
アラームの詳細については,以下を参照してください。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
1-371
参照
1.4(B2)
2.5(K3)
1-372
1.9 補助機能出力 (H2)
1.9.1 概略説明
補助機能
ワークを加工するために,軸位置や補間だけでなく,プロセスに関連した機能
(フィードレート,スピンドル速度,ギアステージ)と,機械上の追加装置を制御
するための機能(スリーブフォワード,グリッパオープン,クランプチャック)
をプログラムすることができます。これらのプロセス関連機能は補助機能を使っ
てプログラムします。
補助機能には次のようなタイプがあります。
• 準備機能 (M)
• 主軸機能 (S)
• 補助機能 (H)
• ツール番号 (T)
• ツールオフセット D,DL (SW5)
• 切削送り速度 (F)
これらの機能は次のような時点で起動され,PLC に出力されます。
- パートプログラムブロックの実行を基準にして定義された瞬間
- プログラムされた条件を満たした時点
PLC への補助機能出力
補助機能パラメータは,パートプログラムの補助機能出力を通じて,PLC インタ
フェースに送信されます。PLC インタフェースでは,PLC ユーザプログラムが,
基本 PLC プログラムに属するファシリティを介して補助機能パラメータを使用で
き,機械側で適当なリアクションが開始できます。
参照: 1.15 基本的 PLC プログラム (P3)
補助機能の特性
正しく構成を行うと,上記の補助機能タイプに共通の特性を割当てることができ
ます。
補助機能グループ
補助機能を組合わせてチャンネル別グループを作ることができます。
1-373
PLC の確認応答
補助機能には,パートプログラム中に選択された PLC 確認応答に基づく 2 つのク
ラスがあります:
• 通常補助機能
• 高速補助機能
• ブロックチェンジ遅延のない高速補助機能 (SW 5)
補助機能出力のアプリケーション
補助機能は次の中で使用されます。
• 通常のパートプログラムブロック
• 同期アクション/テクノロジサイクルのアクションパーツ
1-374
1.9.2 詳細説明
はじめに
補助機能出力の目的は,パートプログラムにプログラムされた切換え操作を機械
上で開始しなければならない場合に,それを速やかに PLC に通知することです。
PLC は補助機能から通知を受け,その補助機能パラメータが PLC インタフェース
に送信されます。送信された値と信号は PLC アプリケーションプログラムが処理
しなければなりません。このセクションでは補助機能の構成/プログラミングの
様々な方法と,その動作原理について説明します。
■ 補助機能のプログラミング
補助機能の一般構造
ID 文字 [ アドレス拡張 ]= 値
補助機能に使用できる ID 文字は次のとおりです:
M,S,H,T,D,F
アドレス拡張は整数でなければなりません。アドレス拡張と値は,補助機能毎に,
その意味と値の範囲が定義されます。アドレス拡張を直接数値で指定する場合,
角括弧 [ ] は省略できます。詳細については,表 1.6 を参照してください。
機能のアドレス拡張に値 0,1,2,30,17 は使用できません。これらの場合は,
次のような省略構造を使用してください。
補助機能の省略構造
ID 文字 値
アドレス拡張を指定しない場合,拡張は 0 と解釈されます。この場合,値は ID 文
字の直後に配置します。
例:M17
変数によるアドレス拡張と値の指定
アドレス拡張と値は変数形式でも指定できます。
例:
SPINDLE_NO=1
ROTATIONALDIRECTION=3
...
M[SPINDLE_NO]=ROTATIONALDIRECTION
....
M1=3 に相当します。
文字列タイプのアドレス拡張( F 機能の軸名)は PLC インタフェースに送信され
ません。割当てられた値だけが送信されます。
1-375
表 1.6 補助機能の概要,プログラミング
機能
アドレス拡張(整数)
意味
エリア
値
エリア
-
暗示的 0
0 ~ 99
注 1 を参照
スピンドル
番号
1 ~ 12
オプション
S
スピンドル
番号
H
オプション
M
説明
タイプ
ブロック
毎の数
意味
機能
00 ~ 99 の値の範囲では,アドレス拡張は 0
M0,M1,M2,M17,M30 はアドレス拡張が使用で
きない。
1 ~ 99
機能
スピンドル番号でアドレス拡張した M3,M4,M5,
M70。例えばスピンドル 2 の M5 は:M2 = 5 。スピ
ンドルを指定していない場合はマスタスピンドルが
使用される。
0 ~ 99
100 ~
2147483647
( 最大整数値 )
機能
ユーザ M 機能。
1 ~ 12
0 ~ ± 3.4028 ex
38 注 3 を参照
実数
速度
マスタスピンドルの場合はスピンドル番号なし。
3
0 ~ 99
-2147483648
+2147483647
整数
(SW 5)
オプション
機能は NCK では効果がない。機能を実行できるのは
PLC だけである。
3
± 3.4028 ex 38
注 : 2,3,4
実数
0 ~ 32000
整数
(TO がアクティブ
なツール名を含
む)
ツールの
選択
ツール名は PLC インタフェースに送信されない。
1
0~9
整数
ツール
オフセット
の選択
D0 の選択,デフォルトは D1。
1
± 3.4028 ex 38
実数
ツール
ファイン
オフセット
選択
(/FBW/)
を参照
以前に選択された D 番号を参照する。
1
フィードレート。
6
整数
注:5
5
注:5
T
スピンドル
番号
(TO アク
ティブ)
注: 5
1 ~ 12
D
DL
F
(FA)
位置依存
オフセット
1~6
0 パス
0.001 ~
フィード, 999 999.999
1 ~ 31 の
軸番号
実数
パス
軸
(注)1) 値が <99 で,アドレス拡張が指定されている場合(例:
M20 = 98)
,制御系はアドレス拡張を抑制する(M = 98)。
2) ユーザは,MD 22110:AUXFU_H_TYPE_INT を使って値の
タイプを選択できる。
適用 SW バージョン 5 以降
3) 操作パネルの画面の表示能力が限られているため,実数値
は -999999999.9999 ~ 999999999.9999 に制限される。NC カー
ネルが内部で実数精度に変換する。
4) 設定 MD 22110: AUXFU_H_TYPE_INT= 1 によって与えられ
る実数値は,PLC への送信中に四捨五入される。PLC プログ
ラムはその値を MD 設定値に従って解釈しなければならない。
5) ツールマネジメントがインストールされている場合,SW5
以降では,MD がアドレス拡張の意味を制御できる。
1-376
1 つのブロックで合計最大 10 個の補助機能をプログラムすることができます。
値のアドレス拡張について指定された長さを超えた場合,あるいは,間違った
データタイプを使用した場合は,アラーム 14770 (補助機能プログラミングのエ
ラー)が出力されます。以下の表は H 機能のプログラミング例を示すものです。
表 1.7 H 機能のプログラミング例
PLC への H 機能出力
プログラミング:
(coolant- 冷却水 - = 12, lubricant- 潤滑剤 - = 130)
H[coolant]=lubricant
H12=130
H=coolant
H0=12
H5
H0=5
H=5.379
H0=5.379
H17=3.5
H17=3.5
H[coolant]=13.8
H12=13.8
H=’HFF13’
H0=65299
H=’B1110’
H0=14
H5.3=21
エラー,アラーム 14770
1-377
■ PLC インタフェースへの値と信号の送信
コンポーネントの内容
補助機能は次の 3 つのコンポーネントと共に PLC インタフェースに送信されます。
• アドレス拡張
• 値
• 信号の有効性を示す信号
PLC インタフェースでのコンポーネントの位置については以下の参照で説明され
ています。
参照: パラメータ一覧 PLC インタフェースへのアクセス方法については以下の参照で説明されています。
参照: 1.15 基本的 PLC プログラム (P3)
送信のタイミング
補助機能パラメータの PLC への送信タイミングを補助機能タイプ毎に定義するた
めにマシンデータをプログラムすることができます。
MD 22200: AUXFU_M_SYNC_TYPE
MD 22210: AUXFU_S_SYNC_TYPE
MD 22220: AUXFU_T_SYNC_TYPE
MD 22230: AUXFU_H_SYNC_TYPE
MD 22240: AUXFU_F_SYNC_TYPE
MD 22250: AUXFU_D_SYNC_TYPE
マシンデータの割当て :
0:
軸移動前に出力
1:
軸移動中に出力
2:
ブロックの最後に出力
3:
PLC に出力しない
ブロックの最後に出力される補助機能の場合,すべてのパスと位置決め軸が補間
を終了するまではパラメータは送信されません。
出力タイプ(軸移動前,軸移動中,軸移動の最後)の異なるいくつかの補助機能
を 1 つの軸移動ブロックとしてプログラムした場合,出力タイプに従って個々に
機能が出力されます。
(位置決め軸やスピンドルがあっても)移動指令のないブロックでは,補助機能は
すべてブロック中に即時出力されます。
補助機能 M17 または M2/M30 を 1 つのブロック中の唯一の補助機能としてプログ
ラムする場合,その機能のパラメータは,軸が停止するまでは PLC に出力されま
せん。
1-378
補助機能出力の例
NC ブロックには MD によって定義できる 3 つの様式があります。
N10 G01 X100 M07 H5 T5
マシンデータの設定値は次のとおりです:
MD 22220: AUXFU_T_SYNC_TYPE =0
軸移動前の T 機能の出力時間
MD 22200: AUXFU_M_SYNC_TYPE =1
軸移動中の M 機能の出力時間
MD 22230: AUXFU_H_SYNC_TYPE =2
ブロック最後の H 機能の出力時間
補助機能は次の順番で出力されます:
図 1.67 補助機能出力の例
連続パスモード
パス動作が継続されるのは,動作中に補助機能が出力され,パス終点に達する前
に PLC が確認応答した場合だけです。
参照: 1.3 連続送り,イグザクトストップモードと先読み
(B1)
また,
「■ PLC による補助機能の確認応答」も参照
してください。
M コマンドに関連した例外
サブプログラムの M コマンド M2,M17,M30 の PLC 出力は,MD 20800:
SPF_END_TO_VDI で選択できます。
1:
サブプログラムの M 機能(M17 あるいは M2/M30)が PLC イン
タフェースに送信される
0:
サブプログラムの M 機能(M17 あるいは M2/M30)は PLC イン
タフェースに送信されない
1-379
■ 補助機能のグループ化
はじめに
タイプ M,S,H,T,D の補助機能は,チャンネル別マシンデータのプログラミ
ング時に 1 つのグループにまとめることができます。MD 11110:
AUXFU_GROUP_SPEC[k] を使用することで,送信タイミングが同じである複数の
特性を 1 つのグループとして PLC に割当てたり,PLC 確認応答モードを 1 つのグ
ループとして全補助機能に割当てたりすることができます。
グループ特性の制御
MD 11110: AUXFU_GROUP_SPEC[k]
設定ビット:
0:
補助機能確認応答(1.9.2「■ PLC による補助機能の確認応答」参照)
1:
高速補助機能確認応答(1.9.2「■ PLC による補助機能の確認応答」
参照)
2:
予備
3:
PLC に出力しない
4:
予備
5:
ブロック処理開始前に出力
6:
ブロック処理進行中に出力
7:
ブロックの最後に出力
プログラムされた補助機能をあるグループに割当てる場合,対応するグループ仕
様だけが有効となります。
仕様はそのグループに割当てられているすべての補助機能に適用されます。添字 k
はそのグループ番号を表しています。
グループに割当てられていない補助機能の特性
グループに割当てられていない補助機能は,"normal acknowledgement" (通常確認
応答)を必要とする補助機能として扱われます(1.9.2「■ PLC による補助機能の
確認応答」参照)。
グループの数
最大 15 個の補助機能グループが定義できます。
チャンネル毎の補助機能の数
15 個の補助機能グループに,合計で最大 50 個の補助機能を割当てることができま
す。実際に使用する補助機能の数を MD 11100:
AUXFU_MAXNUM_GROUP_ASSIGN で指定します。この数には,予め標準設定さ
れている補助機能は含まれません。デフォルトのグループ特性,デフォルトの補
助機能割当ての説明を参照してください。
1-380
グループ割当て
特定のチャンネルの特定の補助機能は 次の 3 つのマシンデータで識別されます:
MD 22010: AUXFU_ASSIGN_TYPE[n]="ID letter"
補助機能タイプ(ID 文字)
MD 22020: AUXFU_ASSIGN_EXTENSION[n]= address extension
補助機能のアドレス拡張
MD 22030: AUXFU_ASSIGN_VALUE[n]= value
補助機能の値
この補助機能は,
MD 22000: AUXFU_ASSIGN_GROUP[n]= k で特定のグループに割当てられます。
補助機能のグループ
ここで,n は 0 ~ 49 を表し,1 つのチャンネルで使える 50 個の補助機能の 1 つで
す。補助機能の割当てに関連する 4 つのマシンデータにはすべて n に同じ数を指
定しなければなりません。
例
S2 値をすべてグループ 11 に割当てなければなりません。したがって,17 番目の
補助機能の MD は次のとおりです:
⇒ MD 22010: AUXFU - ASSIGN - TYPE[17] = "S"
MD 22020: AUXFU - ASSIGN - EXTENSION[17] = 2
MD 22030: AUXFU - ASSIGN - VALUE[17] = -1
MD 22000: AUXFU - ASSIGN - GROUP[17] = 11
1-381
特殊機能
次で設定された値(M,S,H,T,D,F 機能の出力タイミング)は,同一グルー
プに割当てられた補助機能については無視されます。
MD 22200: AUXFU_M_SYNC_TYPE
MD 22210:AUXFU_S_SYNC_TYPE
MD 22220:AUXFU_T_SYNC_TYPE
MD 22230:AUXFU_H_SYNC_TYPE
MD 22240:AUXFU_F_SYNC_TYPE
MD 22250:AUXFU_D_SYNC_TYPE
明示的に高速確認応答されるようにプログラムされた補助機能(例えば M=
QU(100) )は,機能が「通常確認応答」される補助機能グループに割当てられてい
る場合は無視されます。
MD 22030: AUXFU_ASSIGN_VALUE[n] (補助機能値)が <0 の値に設定されてい
ると,同じアドレス拡張が設定されたタイプの補助機能がすべてこのグループに
割当てられます。
これらの特殊機能は,上の例では,主軸の S 値をすべて 1 つのグループに割当て
るのに利用されています。
デフォルトでの補助機能割当て
グループ 1:
補助機能 M0,M1,M2,M17,M30 は標準でグループ 1 に割当てられています。
グループ 2:
マスタ主軸の M 機能 M3,M4,M5,M70 は標準でグループ 2 に割当てられてい
ます。
グループ 3:
マスタ主軸の S 機能は標準でグループ 3 に割当てられています。
デフォルトでのグループ特性
補助機能は,MD 11110: AUXFU_GROUP_SPEC[n] で特に特性が定義されていない
場合は次の特性を持ちます。
• PLC による通常確認応答
• 送信時間:
- グループ 1 ではブロックの最後
- グループ 2 では軸移動の前
- グループ 3 では軸移動中
グループ 2 ~ 15 ではこの設定を変更できますが,グループ 1 ではできません。
1-382
■ PLC による補助機能の確認応答
はじめに
グループ化された補助機能に対して PLC が確認応答するときのモードをプログラ
ミングする方法について説明します。このセクションでは,以下の応答特性につ
いて説明します。
• 通常確認応答
• 高速確認応答
SW5 以降では,以下のようなブロックチェンジ挙動を制御することもできます。
• ブロックチェンジ遅延あり
• ブロックチェンジ遅延なし
ブロックチェンジは次によって制御されます:
MD 22100: AUXFU_QUICK_BLOCKCHANGE
MD の値
意味
0
ブロックチェンジ遅延あり
1
ブロックチェンジ遅延なし
これらの仕様について考えられる組合わせを次のセクションで説明します。
次ページの表では,補助機能出力の指定時間,マシンデータの設定,確認応答タ
イプに依存するブロックチェンジ挙動と減速について具体的に説明します。
■ ブロックチェンジ遅延のある通常確認応答
通常確認応答される通常確認応答補助機能は,基本 PLC プログラムが OB1 コール
を開始すると,PLC インタフェースに送信されます。インタフェース信号の遷移
は,いつ値が有効になるかを示します。補助機能は,PLC が OB1 コールを終了す
る(PLC ユーザサイクルが完全に 1 回行われる)と直ちに基本 PLC プログラムに
よって確認応答されます。
通常補助機能はブロック同期で出力されます。
確認応答前にブロック処理が終了すると,確認応答が受信されるまでブロック
チェンジが遅延します。その結果,通常確認応答される補助機能のパス動作中に
補助機能出力が起こり,ブロックの最後に達する前に PLC が確認応答した場合に
限ってパス動作が連続します。
1-383
補助機能グループに属するすべての補助機能( 1.9.2「■ 補助機能のグループ化」参
照)を,通常確認応答される補助機能として定義するには MD 11110:
AUXFU_GROUP_SPEC[n] をプログラムします。
補助機能がどの補助機能グループにも割当てられていない場合は,PLC への出力
時間 MD 22200-22250: AUXFU_x_SYNC_TYPE(x は補助機能タイプ M,S,H,T,
D,DL,F を表す)が "0" に設定されていなければ(設定 3),常に,
「通常確認応
答」される補助機能と同様に扱われます。
減速を伴うブロックチェンジ遅延がある場合
補助機能の通常確認応答
MD 22100: AUXFU_QUICK_BLOCKCHANGE = 0
表 1.8
補助機能出力
応答
動作前
動作が前のブロックの最後で停止する。補助機能はそのブロック
の最初の補間サイクル中に出力される。この動作は,OB1 PLC 1
サイクル後に,補助機能が PLC によって確認応答されてからでな
いと続行しない。
動作中
ブロック最後までの時間が最大 PLC 確認応答時間( OB1 1 サイク
ルの時間)を超えるまで,現在のツールパス速度が減少する。こ
のため,次のブロックが実行される前に,PLC がすべての補助機
能に対して確認応答することができる。
動作後
動作がブロック最後で停止する。補助機能がブロック最後で出力
される。OB1 確認応答が受信されるまで次のブロックは実行され
ない。
1-384
■ ブロックチェンジ遅延のある高速確認応答
アプリケーション
PLC でのパラレル動作の迅速な開始,継続処理の必要がある場合の確認応答の連
続スキャン。
高速確認応答される補助機能は,基本 PLC プログラムが次の OB1 コールを開始す
る時点で PLC インタフェースに送信されます。
送信されたブロックの補助機能を PLC が確認すると,(OB40 中の)基本 PLC プロ
グラムが,直ちにその補助機能の確認応答を送信します。
この確認応答は 補助機能が PLC で実行されたということを意味するものではありま
せん。PLC がその補助機能を受信したという確認だけです。
しかし,OB1 が 1 サイクル完全に実行されるまで,次の補助機能ブロックは送信
されません。このため,高速確認応答される補助機能がいくつかの NC ブロックで
続けて出力される場合は,目だった遅延が生じます。
高速確認応答される補助機能の場合,PLC ユーザプログラムがブロック同期で応
答する保証はありません。
補助機能グループに属するすべての補助機能(1.9.2「■ 補助機能のグループ化」参
照)を,高速確認応答される補助機能として定義するには MD 11110:
AUXFU_GROUP_SPEC[n] をプログラムします。
プロセスアラーム OB40 での補助機能の評価
基本 PLC プログラムを適切にパラメータ化することによって,PLC ユーザプログ
ラムがプロセスアラーム OB40 において補助機能 T および H を直接評価できるよ
うにプログラムすることができます( SW バージョン 3.5 以降)。
参照: 1.15 基本的 PLC プログラム (P3)
明示的高速確認応答
補助機能グループに割当てられていない M,S,H,T,D の各補助機能は,パー
トプログラム中で高速補助機能として指定できます。
例 : M = QU(7);
M7 の高速出力
高速補助機能であると確認 : QU( 値 )
(注)プログラムされた明示的高速確認応答は,関連する補助機能
が PLC によって通常確認応答される補助機能グループに割当
てられている場合は無視されます。補助機能グループに割当
てられた特性の方が優先されます。
パートプログラム中に明確に定義されているブロックリミッ
トは PLC ユーザプログラム中では定義されません。
1-385
時間応答の例
パートプログラム :
N10 G94 G01 X50 M100
MD 22200: AUXFU_M_SYNC_TYPE = 1 軸移動
中に M100 を出力
N20 Y5 M100 M200
MD 22200: AUXFU_M_SYNC_TYPE = 0 軸移動
前に M200 を出力
N30 Y0 M=QU(100) M=QU(200)
高速補助機能として出力
N40 X0
N50 M100 M200
軸移動なし,即時出力
M17
次の図は,通常補助機能出力と高速補助機能出力の時間的な関係(プログラムさ
れた軸移動との様々な同期モード)を示しています。N20 と N30 のブロック処理
時間が異なることにご注意ください。
X 軸
Y 軸
ブロック番号
M 機能 1
NCK からのストローブ
信号と基本 PLC
プログラムによる確認応答
M 機能 2
M 機能 1 チェンジ (IS)
M 機能 2 チェンジ (IS)
PLC サイクル時間 (OB1)
図 1.68 通常補助機能出力および高速補助機能出力
1-386
減速を伴うブロックチェンジ遅延がある場合
補助機能の高速確認応答
MD 22100: AUXFU_QUICK_BLOCKCHANGE = 0
表 1.9
補助機能出力
応答
動作前
動作が前のブロックの最後で停止する。補助機能はそのブロッ
クの最初の補間サイクル中に出力される。この動作は,OB4
PLC 1 サイクル後に,補助機能が PLC によって確認応答されて
からでないと続行しない。
動作中
ブロック最後までの時間が最大 PLC 確認応答時間(OB1 1 サイ
クルの時間)より長くなるように現在のツールパス速度が減少
する。このため,次のブロックが実行される前に,PLC がすべ
ての補助機能を確認できる。
動作後
動作がブロックエンドで停止する。補助機能がブロックエンド
で出力される。OB40 確認応答が受信されるまで次のブロック
は実行されない。
■ ブロックチェンジ遅延のない高速確認応答
この設定では,NCK から PLC への送信のブロック同期性が保証されず,最悪の場
合,ブロックチェンジ後の,OB1 の 1 サイクル時間が経過するまではブロック同
期が起こらないことがあります。高速確認応答では,補助機能が OB1 サイクルま
で実行されないため,ブロックの同期性が保証されません。
この補助機能出力ではパス動作が継続されます。PLC サイクル時間が大きく変動
してもアラームが散発的に出力されることはありません。
減速を伴うブロックチェンジ遅延のない場合
補助機能の高速応答確認
MD 22100: AUXFU_QUICK_BLOCKCHANGE = 1
表 1.10
補助機能出力
応答
動作前
高速補助機能を伴うブロック間で,中断も減速もなくブロック
の移行が起こる。補助機能がそのブロックの最初の補間サイク
ル中に出力される。確認応答が遅延せずに次のブロックが実行
される。
動作中
高速補助機能を伴うブロック間で,中断も減速もなくブロック
の移行が起こる。補助機能がそのブロック中に出力される。確
認応答が遅延せずに次のブロックが実行される。
動作後
ブロックエンドで動作が停止する。補助機能がそのブロックエ
ンドで出力される。確認応答が遅延せずに次のブロックが実行
される。
1-387
SW 5 以降での動的応答の例
確認応答の到着
減速ランプ中に次のブロックの
動作を起動できる。
"soft start" (ソフトスタート)
。
図 1.69 減速相中に受信される確認応答の予想
■ ブロックサーチ応答
計算によるブロックサーチ
計算を要するブロックサーチを使って,補助機能が評価され,グループ別に蓄積
されます。各グループ最後の補助機能は NC スタート後,実際の再エントリブロッ
ク前に出力されます。
蓄積された補助機能はすべて別々のブロックに
• 通常補助機能として
• 軸移動前に
NC スタート後のブロックサーチ終了時に出力されます。
ブロックサーチ中に補助機能を蓄積しなければならない場合は,その補助機能を 1
つの補助機能グループ(1.9.2「■補助機能のグループ化」参照)に割当ててくださ
い。1 つのグループに割当てる方法の例は「補助機能のグループ化」で説明してい
ます。
例外 :
最初のグループの補助機能は蓄積されません。
ブロックサーチ後のオーバストア
「Overstore」機能を使うと,ブロックサーチ中に蓄積された補助機能だけでなく,
新しい補助機能も NC スタート前に出力することができます。
次のセクションを参照してください。
プログラムされたスピンドルの位置決め
ブロックサーチターゲットの前に別の主軸機能がプログラムされていても,計算
によるブロックサーチの後,主軸は常に,最後にプログラムされたとおりに位置
決めされます。
ブロックサーチに関する詳細は次を参照してください。
参照: 1.10 運転モードの種類とプログラム運転モード
( K1)
1-388
(注)主軸関連補助機能 M3,M4,M5 は,スピンドルが位置決めさ
れるまで,PLC に出力されない場合があるため,主軸イネー
ブルはトラバースコマンド (DB31DBB64) から得るようにしな
ければなりません。
■ オーバストアに対する応答
アプリケーション
補助機能は,プログラムの開始前または中断時に,「Overstore」を使って変更する
ことができます。したがって,例えば,プログラムの試運転またはブロックサー
チ後に,ユーザが現在の M,S,T,H の値を手動で入力しなければならないこと
もあります。
補助機能のタイプ
以下の補助機能は「Overstore」によって変更できます。
• ツール番号 T
• ツールオフセット番号 D
• 主軸速度 S
• 補助機能 H
• 準備機能 M
• 切削送り速度 F
起動/停止
補助機能は,NC スタートが開始された時点でだけ,関連遷移信号と共にインタ
フェース上に出力されます。パートプログラムの処理を行えるように別の「オー
バストア」動作によって,あるいは,プログラムされた同タイプの補助機能に
よって選択が取消されるまで有効です。
オペレーション
参照: YS840DI ユーザーズマニュアル・プログラミング編
1-389
■ 補助機能のアプリケーション
機能
M
アプリケーション
例外
マシン上の切換動作をパートプログラムから起動する。 以下の M 機能には予め定義された意味がある
(Programming Guide 参照 ):
M0,M1,M2,M17,M30,いずれもアドレス拡張なし
M3,M4,M5,M6,M70,M40,M41,M42,M43,
M44,M45
*)
M 機能が新しく到着したことを示すために,PLC インタ
フェースの各補助機能 M00 ~ M99 に動的信号が与えられ
る。ユーザ定義 M 機能に,さらに 64 個の信号を割当てる
こともできる。
1.15 「基本的 PLC プログラム (P3)」参照
M17,M2,M30 では MD 20800: SPF_END_TO_VDI を使用
して,PLC に出力するかどうかを定義することができる。
S
PLC インタフェースへのスピンドル速度の送信
S 機能は標準でグループ 3 に割当てられている。1.9.2「■
補助機能のグループ化」参照。
アドレス拡張のない機能はマスタスピンドルを意味する。
H
NCK は制御せず,PLC だけが制御する切換機能,補助
機能,軸移動機能
H 補助機能の値が解釈されるデータタイプを MD 22110:
AUXFU_H_TYPE_INT に定義することができる (SW 5 以降
)。
以下のデータタイプが使用できる :
整数 -2 147 483 648 ~ 2 147 483 647 または
実数 -3.4028 ex 38 ~ 3.4028 ex 38
T
ツールの選択
ツール番号または位置番号のいずれかによるツールの識別
/FBW/, Tool management
1.19「工具補正(W1)」T0 が選択されていると,現在の
ツールがツールホルダから取外されるが,新しいツールは
ツールホルダに取付けられない。
( 初期設定 )
D 機能を使用すると,前のアクティブツール用に定義さ
れ NC メモリに保存されているツールオフセットを選択
することができる。PLC に転送された D 番号は,切換
オペレーションと保護機能を実施する目的で評価され
る。
D1 は,D 機能が起動していない場合に適用される。MD
20270: CUTTING_EDGE_DEFAULT は,ツールチェンジ後
のデフォルトオフセットを決める。
D0 はツールオフセットの選択を解除する。
DL
PLC への位置依存ファインオフセットの送信
このパラメータはすでに送信されている D 番号に関するも
のである。
F
パートプログラム中に設定されているフィードレートを アドレス拡張なし : パスフィード
F 機能と共に PLC に送信する。PLC はこのフィードレー FA [ アドレス拡張 ] : マシン軸番号をアドレス拡張とした
トデータから切換動作と保護機能を得ることができる。 位置決め軸のフィードレートフィードレートは G93,G94,
G95,G96,G33,G63,G331,G332 と共に送信できるが,
G4 を使ってプログラムされた滞在時間と一緒には送信で
きない。
注 : 連続パスモードでは,PLC への F 機能出力中に軸速度
が低下することがある。この機能はやむをえない場合にだ
け使用すべきである。
*)
*)
D
RESET,プログラムスタート,電源投入に対するシステム
応答は,MD 20110: RESET_MODE_MASK と MD 20120:
START_MODE_MASK および他のマシンデータによって決
められる。1.11「軸構成及び座標系 (K2)」
*) ツールマネジメントをインストールしている場合 ( /FBW/ 参照 ),SW5 以降で
は,アドレス拡張の意味を MD によって制御することができる。
1-390
1.9.3 補足条件
機能の使用
「PLC への補助機能出力」機能は SW バージョン 1 以降で使用できます。
SW 5
次のような拡張機能が追加されています。
• ブロックチェンジ遅延のない高速確認応答
• H 補助機能でデータタイプが選択でき,整数タイプの範囲が広がっている
• DL PLC への位置依存ファインオフセットの送信 (> SW 5.1)
• ツールマネジメントに関連して M,S,T 補助機能のアドレス拡張の意味が多
様化されている (> SW 5.1)
1-391
1.9.4 データの説明 (MD,SD)
■ 一般マシンデータ
11100
MD 番号
AUXFU_MAXNUM_GROUP_ASSIGN
(AUXFU グループに分散されている補助機能の数)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 50
変更が有効になるための条件:
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
この MD には機能グループに分散されている(チャンネル毎の)補助機能の実際
数を入力すること。
補助機能の MD はすべてのアクティブチャンネルについて表示される。
この数は,顧客別補助機能だけを含み,予め定義された補助機能は含まれない
(
「1.9.2「■補助機能のグループ化」参照)。
アプリケーション例
1.9.6 「例」参照
関連性
MD 22010: AUXFU_ASSIGN_TYPE[n]
11110
MD 番号
AUXFU_GROUP_SPEC[n]
( 補助機能グループの仕様 )
初期設定 : 下記参照
最小入力リミット : -
最大入力リミット : ***
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 :16 進
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
この MD は 1 つのグループに属する補助機能の出力モードを定義する。
コーディング :
ビット 0=1 → 出力期間 OB1 の 1 ランタイム ( 通常補助機能 )
ビット 1=1 → 出力期間 OB40 の 1 ランタイム,アラーム制御 ( 高速補助機能 )
ビット 2 予備
ビット 3=1 → PLC に出力しない ( 単一ビットとしてしかセットできない )
ビット 4 予備
ビット 5=1 → 軸移動前に出力
ビット 6=1 → 軸移動中に出力
ビット 7=1 → ブロック最後に出力
MD は,現存するすべての補助機能グループについて定義しなければならない。
添字 [n] は機能グループ番号 : 0...14 と一致する。[0]= 第一補助機能グループ,
[1]= 第二補助機能グループ ...
初期設定 :
AUXFU_GROUP_SPEC[0]=81H
AUXFU_GROUP_SPEC[1]=21H
AUXFU_GROUP_SPEC[2]=41H
...
AUXFU_GROUP_SPEC[14]=41H
アプリケーション例
1.9.6「例」参照
1-392
■ チャンネル別マシンデータ
20800
MD 番号
SPF_END_TO_VDI
(PLC に送信されるサブプログラムエンド)
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
1: サブプログラムエンドの M 機能 (M17 および/または M2/M30) が PLC インタ
フェースに送信される。
0: サブプログラムエンドの M 機能 (M17 および/または M2/M30) が PLC インタ
フェースに送信されない。
注:
連続パスモードで停止しないようにするには,ブロック中で,M17 を単独でプ
ログラムしないこと。
G64 F2000 G91 Y10 X10
サブプログラムの例 :
X10 Z10 M17
アプリケーション例
22000
MD 番号
• 設定 SPF_END_TO_VDI=0 では,連続パスモードがアクティブのままである。
• 設定 SPF_END_TO_VDI=1 では,連続パスモードでフィードレートが低下す
ることがある。
AUXFU_ASSIGN_GROUP[n]
(補助機能 [ チャンネルでの補助機能番号 ]: 0...49)
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 15
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
MD: AUXFU_ASSIGN_TYPE [n] ( 補助機能タイプ ) 参照
アプリケーション例
1.9.6「例」参照
1-393
22010
MD 番号
AUXFU_ASSIGN_TYPE[n]
(補助機能タイプ [ チャンネルでの補助機能番号 ]: 0...49)
初期設定 : -
最小入力リミット : -
最大入力リミット : 16 キャラクタ
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1.1
意味 :
補助機能タイプ (M, S, H, T, D),それに関連する拡張,および,補助機能値を 1
つの補助機能グループに割当てるために,マシンデータ
AUXFU_ASSIGN_TYPE[n] ( 補助機能タイプ ),
AUXFU_ASSIGN_EXTENSION[n] ( 補助機能拡張 ),
AUXFU_ASSIGN_VALUE[n] ( 補助機能値 ),
AUXFU_ASSIGN_GROUP[n] ( 補助機能グループ ) が定義される。
M 0 = 100 => グループ 5 (M100 に相当 )
例:
補助機能タイプ
補助機能拡張
補助機能値
補助機能グループ
⇒
MD: AUXFU_ASSIGN_TYPE[0] = "M"
MD: AUXFU_ASSIGN_EXTENSION[0] = 0
MD: AUXFU_ASSIGN_VALUE[0] = 100
MD: AUXFU_ASSIGN_GROUP[0] = 5; ( = 5 番目のグループ )
補助機能 M00, M01, M02, M17, M30 は標準でグループ 1 に割当てられている。
マスタスピンドルの M3, M4, M5, M70 は標準でグループ 2 に割当てられている。
マスタスピンドルの S 機能は標準でグループ 3 に割当てられている。
ある補助機能を 1 つのグループに割当てると,PLC インタフェースに対して設定
された同期性と,同時にプログラムされた軸移動とを MD:
AUXFU_GROUP_SPEC [n] ( 補助機能グループの仕様 ) で検索することができる。
選択された補助機能については,マシンデータ MD:
AUXFU_[M,S,H,T,D,F]_SYNC_TYPE ( [M,S,H,T,D,F] 機能の出力タイミング ) に定
義された設定値が無視される。プログラムされた高速補助機能(例 .
M=QU(100))も無視される。
マシンデータのインデックス [n] はチャンネル:0 ~ 49 の補助機能番号を示す。
補助機能グループに割当てられた補助機能機能はすべて昇順に番号を付けるこ
と。
[0] = 1 番目の補助機能
[1] = 2 番目の補助機能
1 つの補助機能を 1 つの補助機能グループに割当てるのに使用される 4 つの各マ
シンデータには同一のインデックス [n] を使用すること。
アプリケーション例
1.9.6「例」参照
例外,エラー
ある補助機能の補助機能値が 0 未満の場合は,このタイプと拡張から成る補助機
能がすべて同じグループに割当てられる。
例 :S2 = -1 => グループ 9
( 第二スピンドルの S の値がすべてグループ 9 に割当てられる )
関連性
MD 11100: AUXFU_MAXNUM_GROUP_ASSIGN
1-394
22020
MD 番号
AUXFU_ASSIGN_EXTENSION[n]
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 99
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
MD: AUXFU_ASSIGN_TYPE [n] ( 補助機能タイプ ) 参照
アプリケーション例
1.9.6 「例」参照
例外,エラー
補助機能拡張 1 ~ 4 は,S および M 機能のあるスピンドル機能用であ
る。
22030
MD 番号
(補助機能拡張 [ チャンネルでの補助機能番号 ]: 0...49)
AUXFU_ASSIGN_VALUE[n]
(補助機能値 [ チャンネルでの補助機能番号 ]: 0...49)
初期設定 : 0
最小入力リミット : ***
最大入力リミット : ***
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 1.1
意味 :
MD: AUXFU_ASSIGN_TYPE [n] ( 補助機能タイプ ) 参照
アプリケーション例
1.9.6 「例」参照
22100
MD 番号
AUXFU_QUICK_BLOCKCHANGE
(遅延のないブロックチェンジ)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5
意味 :
高速補助機能ではブロックチェンジは遅延しない。
0: 高速補助機能出力では,PLC (OB40) から確認応答が受信されるまで,ブ
ロックチェンジが遅延する
1: PLC への高速補助機能出力では,ブロックチェンジは遅延しない
この MD は次の場合は無意味
通常確認応答される補助機能
参照
/FBSY/, Synchronized Actions
1-395
22110
MD 番号
AUXFU_H_TYPE_INT
(H 補助機能のタイプ)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5
意味 :
0: H 補助機能の値は浮動小数点形式で表示される。最大値範囲は +/-3.4028 ex 38
である。
1: H 補助機能の値は四捨五入され,整数形式に変換される。PLC の基本プログ
ラムは値を整数として解釈すること。値範囲は -2147483648 ~ 2147483647 で
ある。
22200
MD 番号
AUXFU_M_SYNC_TYPEM
(機能の出力タイミング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する M 補助機能の同期性
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
軸が移動し始める前にすべての M 機能を PLC に出力しなければならない。
⇒ MD: AUXFU_M_SYNC_TYPE=0
1-396
22210
MD 番号
AUXFU_S_SYNC_TYPE
(S 機能の出力タイミング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する S 補助機能の同期
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
22220
MD 番号
軸が移動し始める前にすべての S 機能を PLC に出力しなければならない。
⇒ MD: AUXFU_S_SYNC_TYPE=0
AUXFU_T_SYNC_TYPET
(機能の出力タイミング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する T 補助機能の同期
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
軸が移動し始める前にすべての T 機能を PLC に出力しなければならない。
⇒ MD: AUXFU_T_SYNC_TYPE=0
1-397
22230
MD 番号
AUXFU_H_SYNC_TYPE
(H 機能の出力タイミング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する H 補助機能の同期性
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
22240
MD 番号
軸の移動中にすべての H 機能を PLC に出力しなければならない。⇒ MD:
AUXFU_H_SYNC_TYPE=1
AUXFU_F_SYNC_TYPEF
(機能の出力タイミング)
初期設定 : 3
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する F 補助機能の同期性
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
22250
MD 番号
ブロックの最後にすべての F 機能を PLC に出力しなければならない。⇒ MD:
AUXFU_F_SYNC_TYPE=2
AUXFU_D_SYNC_TYPE
(D 機能の出力タイミング)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
同時にプログラムされた軸移動に対する D 補助機能の同期性
0 = 軸移動前に出力
1 = 軸移動中に出力
2 = ブロック最後に出力
3 = PLC に出力しない ( ブロックチェンジ中の遅延なし )
注意 : グループの割当が優先される
アプリケーション例
どの D 機能も PLC に出力してはならない。
⇒ MD: AUXFU_D_SYNC_TYPE=3
1-398
22300
MD 番号
AUXFU_AT_BLOCK_SEARCH_END
(ブロックサーチ後に補助機能を出力)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 1.1 ~ 3.2
意味 :
このマシンデータは,ブロックサーチ中に蓄積された補助機能の出力モードを
定義する。
1 : 蓄積された補助機能をブロックサーチの最後に無条件で出力
0 : 蓄積された補助機能を NC スタートの起動後ブロックサーチの最後に出力
1-399
1.9.5 信号の説明
■ チャンネル別信号
■ チャンネルからの信号
DB21-30
DBB58,60-65
データブロック
M,S,T,D,H,F 機能チェンジ
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
M,S,T,D,H または F の機能が,OB1 サイクルの最初に,新しい値とそ
れに関連したチェンジ信号と共にインタフェースに出力されている。この場
合,チェンジ信号は値が有効であることを示す。
信号ステータス 0 あるいは信号
遷移 1 → 0
チェンジ信号が,次の OB1 サイクルの最初に基本 PLC プログラムによってリ
セットされる。
データ値は有効でない。
DB21-30
DBB60-64
DBB66-67
データブロック
M,S,T,D,H,F 機能の追加情報 "Quick" ( 高速確認応答 )
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
M, S, T, D, H または F の機能が,OB1 サイクルの最初に,新しい値とそれに関
連したチェンジ信号と共にインタフェースに出力されている。この場合,追
加情報 "Quick" は,補助機能が高速確認応答用にプログラムされていることを
示す。
信号ステータス 0 あるいは信号
遷移 1 → 0
チェンジ信号が,次の OB1 サイクルの最初に基本 PLC プログラムによってリ
セットされる。
データ値は有効でない。
1-400
信号が有効となる最初の SW
バージョン .: 1.1
信号が有効となる最初の SW
バージョン : 4.1
DB21-30
DBX59.0-DBX59.4
データブロック
リストに記載されていない M 機能 1 ~ 5
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
M 機能が 99 を超えているか ( 拡張アドレス = 0 の場合 ),または,デコーディ
ングリストに記載されていない(拡張アドレスが > 0 の場合)
。
信号が有効となる最初の SW
バージョン .: 1.1
この信号は,関連する M チェンジ信号と共に,OB1 サイクルの最初にインタ
フェースに送信される。
原因 :
→ M 機能が正しくプログラムされていない。
→ M 機能が PLC のデコーディングリストに設定されてない。
処置例
→ PLC がリードインディスエーブルをセットする。
→ PLC アラームの出力
信号ステータス 0 あるいは信号
遷移 1 → 0
M 機能が 99 未満であるか ( 拡張アドレス = 0),または,デコーディングリス
トに記載されていない(拡張アドレス > 0 の場合)
。
DB21-30
DBB68-97
データブロック
M 機能 1 ~ 5
拡張アドレス M 機能 1 ~ 5
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
M チェンジ信号が送信されると直ちに,1 つの NC ブロック中にプログラムさ
れている最高 5 つまでの M 機能がここで使用できるようになる。
M 機能の値範囲 : 0 ~ 9999 9999; 整数
拡張アドレスの値範囲 : 0 ~ 99; 整数 M 機能は新しい M 機能に上書きされる
まで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
アプリケーション
標準で,あるいは,リストによってデコードされない M 機能をデコードまた
は評価する。
拡張アドレスによって,M 機能を,プログラム動作中のチャンネル以外の
チャンネルに割当てることができる。
例外,エラー
M00 ~ M99 の拡張アドレス = 0
信号が有効となる最初の SW
バージョン : 1.1
→ 新しい機能が入力される前にすべての補助機能が削除される。
1-401
DB21-30
DBB98-115
データブロック
S 機能 1 ~ 3
拡張アドレス S 機能 1 ~ 3
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
S チェンジ信号が送信されると直ちに,1 つの NC ブロック中にプログラムさ
れている最高 3 つまでの S 機能がここで使用できるようになる。
スピンドル速度の値範囲 : 0 ~ 9999 9999; 整数
信号が有効となる最初の SW
バージョン :1.1
拡張アドレスの値範囲 : 0 ~ 6; 整数
S 機能は新しい S 機能に上書きされるまで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
→ 新しい機能が入力される前にすべての補助機能が削除される。
アプリケーション
PLC によるスピンドル速度制御この拡張アドレスは,S ワードが有効である
スピンドルをプログラムするのに使用される。
例 : S2=500
DB21-30
DBB118,119
データブロック
T 機能 1
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
T チェンジ信号が送信されると直ちに,1 つの NC ブロック中にプログラムさ
れている T 機能がここで使用できるようになる。
T 機能の値範囲 : 0 ~ 9999 9999; 整数
信号が有効となる最初の SW
バージョン : 1.1
T 機能は新しい T 機能に上書きされるまで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
アプリケーション
自動ツール選択の制御
例外,エラー
T0 が選択されている場合は,現在のツールがツールホルダから外されるが新
しいツールは取付けられない(マシン製造業者による初期設定)。
→ 新しい機能が入力される前にすべての補助機能が削除される。
1-402
DB21-30
DBB129
データブロック
D 機能 1
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
D チェンジ信号が送信されると直ちに,1 つの NC ブロック中にプログラムさ
れている D 機能がここで使用できるようになる。
D 機能の値範囲 : 0 ~ 999; 整数
D 機能は新しい D 機能に上書きされるまで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
→ 新しい機能が入力される前にすべての補助機能が削除される。
アプリケーション
保護機能の実行
例外,エラー
D0 は現在のツールオフセットの選択を解除するために確保してある。
DB21-30
DBB140-157
データブロック
H 機能 1 ~ 3
拡張アドレス H 機能 1 ~ 3
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
H チェンジ信号が送信されると直ちに,1 つの NC ブロック中にプログラムさ
れている最高 3 つまでの H 機能がここで使用できるようになる。H 機能の値
範囲 : 浮動小数点(MC5 + 形式 に相当)
拡張アドレスの値範囲:0 ~ 99; 整数
H 機能は新しい M 機能に上書きされるまで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
アプリケーション
マシンでの切換機能
信号が有効となる最初の SW
バージョン : 1.1
信号が有効となる最初の SW
バージョン : 1.1
→ 新しい機能が入力される前にすべての補助機能が削除される。
1-403
DB21-30
DBB158-193
データブロック
F 機能 1 ~ 6
拡張アドレス F 機能 1 ~ 6
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
F チェンジ信号が送信されると直ちに,最高 6 つまでの F 機能(位置決め軸に
ついてパスフィード 1 つ,軸別フィード最高 5 つまで)がここで使用できる
ようになる。
信号が有効となる最初の SW
バージョン : 1.1
• F 機能の値範囲 : 浮動小数点(MC5 + 形式に相当)
• 拡張アドレスの値範囲:0 ~ 18; 整数
• F 機能の拡張アドレスはフィードレートモード
(パスフィードまたは軸機能別フィード)と軸名から作成される。
次のようにコーディングされる:
0: パスフィード ; 例 : F=1000
1 ~ 18: 位置決め軸のマシン軸番号と軸別フィードレート;
例:FA[X1]=500
機能は新しい F 機能に上書きされるまで有効である。
信号ステータス 0 あるいは信号
遷移 1 → 0
→ PLC 電源投入後
アプリケーション
設定されたフィードレートオーバライドの上書き等によって,プログラムさ
れた F ワードを PLC が制御する。
関連性
MD: AUXFU_F_SYNC_TYPE F 機能の出力時間
DB21-30
DBB194-206
データブロック
動的 M 機能 : M0 - M99
チャンネルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : NCK によるジョブ制御
信号ステータス 1 あるいは信号
遷移 0 → 1
動的 M 信号ビットが,デコードされた M 機能によってセットされる。
信号ステータス 0 あるいは信号
遷移 1 → 0
一般の補助機能出力では,完全な OB1 ルーチンが一度実行されると,基本
PLC プログラムによって,動的 M 信号ビットが確認応答される。高速補助機
能出力の場合,一旦 PLC が補助機能を確認すると,同じ OB40 サイクル内で
動的 M 信号ビットが確認応答される。
アプリケーション
スピンドルの時計回り/反時計回りの回転,クーラントのオン/オフ切換
→ 新しい機能が入力される前にすべての補助機能が削除される。
1-404
信号が有効となる最初の SW
バージョン :1.1
■ 軸別信号
DB31-61
DBD78
データブロック
F 補助機能の値
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : ジョブ制御
信号が有効となる最初の SW
バージョン : 1.1
位置決め軸の F 補助機能の値がここに保存される。
各値が送信される軸が拡張アドレスによって決められる。
DB31-61
DBD86
データブロック
M 補助機能の値
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : ジョブ制御
信号が有効となる最初の SW
バージョン : 1.1
M3,M4,M5 の補助機能の値が,アドレス指定されたスピンドル用に関連イ
ンタフェースに送信される。
DB31-61
DBD88
データブロック
S 補助機能の値
軸/スピンドルからの信号 (NCK → PLC)
エッジ評価 : なし
信号更新 : ジョブ制御
信号が有効となる最初の SW
バージョン : 1.1
S 補助機能の値が,アドレス指定されたスピンドル用に関連インタフェース
に送信される。
1-405
1.9.6 例
マシンの設定
以下のような構成のマシンツールに必要な補助機能のマシンデータを定義しなけ
ればなりません。
• スピンドルが 2 本のマシンツール
スピンドル 1 = マスタスピンドル
スピンドル 2 = 第二スピンドル
• ギアステージ
マスタスピンドルの段 1 ~ 5
• 冷却水
No. 1 "On" = M50
No. 1 "Off" = M51
No. 2 "On" = M52
No. 2 "Off" = M53
要求事項と有効な割当て
スピンドル 1 ( マスタスピンドル ):
• M3, M4, M5, M70 および M1=3, M1=4, M1=5, M1=70 は,標準で補助機能グルー
プ 2 に割当てられています。
• マスタスピンドルの S および S1 の値はすべて標準でグループ 3 に割当てられ
ています。
• 要求事項 : プログラムされる最後のギアステージは,ブロックサーチ後に出力
されること。
⇒ M40,M41,M42,M43,M44,M45 および M1=40,M1=41,M1=42,
M1=43,M1=44,M1=45 は,例えば,グループ 9 に割当てられる。
スピンドル 2:
• 要求事項 : 1 つのブロックに方向転換用の M 機能 1 つだけをプログラムするこ
ともできます。プログラムされる最後の回転方向はブロックサーチ後に出力さ
れること。
⇒ M2=3,M2=4,M2=5,M2=70 は,例えばグループ 10 など,1 つのグループ
に割当てられる。
• 要求事項 : S2 の値はすべて,例えばグループ 11 など,1 つのグループに割当て
ること。
冷却水 :
• 要求事項 : 1 つのブロックで冷却水のオン/オフを切換えることはできません。
冷却水の切換はブロックサーチ後に行うこと。
⇒ M50 と M51 を,例えばグループ 12 など,1 つのグループに割当てる。
⇒ M52 と M53 を,例えばグループ 13 など,1 つのグループに割当てる。
1-406
補助機能の出力
補助機能の出力期間と,プログラムされた軸移動と補助機能が同期をとる方法を
以下の要求事項で決定します。
スピンドル 1 ( マスタスピンドル ):
• マスタスピンドルの回転方向転換は内部機能です。
⇒ M3,M4,M5,M70 および M1=3,M1=4,M1=5,M1=70 ( グループ 2) は,
高速補助機能として軸移動前に出力される。
⇒ S と S1 の値(グループ 3 )は,高速補助機能として軸移動前に出力される。
• ギアチェンジは PLC によって制御されます。
⇒ M40 ~ M45,M1=40 ~ M1=45 ( グループ 9) は,通常補助機能として軸移動
前に出力される。
スピンドル 2:
• 第二スピンドルの回転方向転換は内部機能です。
⇒ M2=3,M2=4,M2=5,M2=70 ( グループ 10) は,高速機能として軸移動前に
出力される。
⇒ S2 の値 ( グループ 11) は高速補助機能として軸移動前に出力される。
冷却水 :
• 冷却水のオン/オフ切換は PLC によって行われます。
⇒ M50, M51 ( グループ 12) および M52, M53 ( グループ 13) は,通常補助機能
として軸移動前に出力される。
1-407
設定用パートプログラム
一般事項 :
合計 21 の補助機能が全グループ内に分散されています。
$MN_AUXFU_MAXNUM_GROUP_ASSIGN=21
スピンドル 1:
グループ 2 の仕様がデフォルトと異なっています :
$MN_AUXFU_GROUP_SPEC[1]= ’H22’; (16 進値としてコーディング )
グループ 3 の仕様がデフォルトと異なっています :
$MN_AUXFU_GROUP_SPEC[2]=’H22’; (16 進値としてコーディング )
グループ 9 の仕様 :
$MN_AUXFU_GROUP_SPEC[8]=’H21’; (16 進値としてコーディング )
1 番目の補助機能 : M40 の記述 ... 6 番目の補助機能 : M45 の記述
$MC_AUXFU_ASSIGN_TYPE[0]="M"
$MC_AUXFU_ASSIGN_EXTENSION[0]=0
$MC_AUXFU_ASSIGN_VALUE[0]=40
$MC_AUXFU_ASSIGN_GROUP[0]=9
:
$MC_AUXFU_ASSIGN_TYPE[5]="M"
$MC_AUXFU_ASSIGN_EXTENSION[5]=0
$MC_AUXFU_ASSIGN_VALUE[5]=45
$MC_AUXFU_ASSIGN_GROUP[5]=9
7 番目の補助機能 : M1=40 の記述 ... 12 番目の補助機能 : M1=45 の記述
$MC_AUXFU_ASSIGN_TYPE[6]="M"
$MC_AUXFU_ASSIGN_EXTENSION[6]=1
$MC_AUXFU_ASSIGN_VALUE[6]=40
$MC_AUXFU_ASSIGN_GROUP[6]=9
:
$MC_AUXFU_ASSIGN_TYPE[11]="M"
$MC_AUXFU_ASSIGN_EXTENSION[11]=1
$MC_AUXFU_ASSIGN_VALUE[11]=45
$MC_AUXFU_ASSIGN_GROUP[11]=9
スピンドル 2: グループ 10 の仕様 :
$MN_AUXFU_GROUP_SPEC[9]= ’H22’; (16 進値としてコーディング )
1-408
13 番目の補助機能 : M2=3 の記述
$MC_AUXFU_ASSIGN_TYPE[12]="M"
$MC_AUXFU_ASSIGN_EXTENSION[12]=2
$MC_AUXFU_ASSIGN_VALUE[12]=3
$MC_AUXFU_ASSIGN_GROUP[12]=10
14 番目の補助機能 : M2=4 の記述
$MC_AUXFU_ASSIGN_TYPE[13]="M"
$MC_AUXFU_ASSIGN_EXTENSION[13]=2
$MC_AUXFU_ASSIGN_VALUE[13]=4
$MC_AUXFU_ASSIGN_GROUP[13]=10
15 番目の補助機能 : M2=5 の記述
$MC_AUXFU_ASSIGN_TYPE[14]="M"
$MC_AUXFU_ASSIGN_EXTENSION[14]=2
$MC_AUXFU_ASSIGN_VALUE[14]=5
$MC_AUXFU_ASSIGN_GROUP[14]=10
16 番目の補助機能 : M2=70 の記述
$MC_AUXFU_ASSIGN_TYPE[15]="M"
$MC_AUXFU_ASSIGN_EXTENSION[15]=2
$MC_AUXFU_ASSIGN_VALUE[15]=70
$MC_AUXFU_ASSIGN_GROUP[15]=10
グループ 11 の仕様 :
$MN_AUXFU_GROUP_SPEC[10]=’H22’; (16 進値としてコーディング )
17 番目の補助機能 : S2=.... の記述
$MC_AUXFU_ASSIGN_TYPE[16]="S"
$MC_AUXFU_ASSIGN_EXTENSION[16]=2
$MC_AUXFU_ASSIGN_VALUE[16]= -1
$MC_AUXFU_ASSIGN_GROUP[16]=11
冷却水 : グループ 12 の仕様 :
$MN_AUXFU_GROUP_SPEC[11]=’H21’; (16 進値としてコーディング )
18 番目の補助機能 : M50 の記述
$MC_AUXFU_ASSIGN_TYPE[17]="M"
$MC_AUXFU_ASSIGN_EXTENSION[17]=0
$MC_AUXFU_ASSIGN_VALUE[17]=50
$MC_AUXFU_ASSIGN_GROUP[17]=12
19 番目の補助機能 : M51 の記述
$MC_AUXFU_ASSIGN_TYPE[18]="M"
$MC_AUXFU_ASSIGN_EXTENSION[18]=0
$MC_AUXFU_ASSIGN_VALUE[18]=51
$MC_AUXFU_ASSIGN_GROUP[18]=12
1-409
グループ 13 の仕様 :
$MN_AUXFU_GROUP_SPEC[12]=’H21’; (16 進値としてコーディング )
20 番目の補助機能 : M52 の記述
$MC_AUXFU_ASSIGN_TYPE[19]="M"
$MC_AUXFU_ASSIGN_EXTENSION[19]=0
$MC_AUXFU_ASSIGN_VALUE[19]=52
$MC_AUXFU_ASSIGN_GROUP[19]=13
21 番目の補助機能 : M53 の記述
$MC_AUXFU_ASSIGN_TYPE[20]="M"
$MC_AUXFU_ASSIGN_EXTENSION[20]=0
$MC_AUXFU_ASSIGN_VALUE[20]=53
$MC_AUXFU_ASSIGN_GROUP[20]=13
1-410
1.9.7 データフィールド,リスト
■ インタフェース信号
DB 番号
ビット,バイト
名称
チャンネル別
21-30
58.0
M 機能 1 チェンジ
21-30
58.1
M 機能 2 チェンジ
21-30
58.2
M 機能 3 チェンジ
21-30
58.3
M 機能 4 チェンジ
21-30
58.4
M 機能 5 チェンジ
21-30
59.0
リストに記載されていない M 機能 1
21-30
59.1
リストに記載されていない M 機能 2
21-30
59.2
リストに記載されていない M 機能 3
21-30
59.3
リストに記載されていない M 機能 4
21-30
59.4
リストに記載されていない M 機能 5
21-30
60.0
S 機能 1 チェンジ
21-30
60.1
S 機能 2 チェンジ
21-30
60.2
S 機能 3 チェンジ
21-30
60.4
S 機能 1 高速
21-30
60.5
S 機能 2 高速
21-30
60.6
S 機能 3 高速
21-30
61.0
T 機能 1 チェンジ
21-30
61.1
T 機能 2 チェンジ
21-30
61.2
T 機能 3 チェンジ
21-30
61.4
T 機能 1 高速
21-30
61.5
T 機能 2 高速
21-30
61.6
T 機能 3 高速
21-30
62.0
D 機能 1 チェンジ
21-30
62.1
D 機能 2 チェンジ
21-30
62.2
D 機能 3 チェンジ
21-30
62.4
D 機能 1 高速
21-30
62.5
D 機能 2 高速
21-30
62.6
D 機能 3 高速
21-30
63.0
E 機能 1 チェンジ
21-30
63.4
E 機能 1 高速
21-30
64.0
H 機能 1 チェンジ
21-30
64.1
H 機能 2 チェンジ
21-30
64.2
H 機能 3 チェンジ
21-30
64.4
H 機能 1 高速
21-30
64.5
H 機能 2 高速
21-30
64.6
H 機能 3 高速
21-30
65.0
F 機能 1 チェンジ
21-30
65.1
F 機能 2 チェンジ
21-30
65.2
F 機能 3 チェンジ
1-411
参照
DB 番号
ビット,バイト
名称
21-30
65.3
F 機能 4 チェンジ
21-30
65.4
F 機能 5 チェンジ
21-30
65.5
F 機能 6 チェンジ
21-30
66.0
M 機能 1 高速
21-30
66.1
M 機能 2 高速
21-30
66.2
M 機能 3 高速
21-30
66.3
M 機能 4 高速機能
21-30
66.4
M 機能 5 高速
21-30
67.0
F 機能 1 高速
21-30
67.1
F 機能 2 高速
21-30
67.2
F 機能 3 高速
21-30
67.3
F 機能 4 高速
21-30
67.4
F 機能 5 高速
21-30
67.5
F 機能 6 高速
21-30
68 - 69
M 機能 1 の拡張アドレス (dual)
21-30
70 - 73
M 機能 1 (DInt)
21-30
74-75
M 機能 2 の拡張アドレス (dual)
21-30
76-79
M 機能 2 (DInt)
21-30
80-81
M 機能 3 の拡張アドレス (dual)
21-30
82-85
M 機能 3 (DInt)
21-30
86-87
M 機能 4 の拡張アドレス (dual)
21-30
88-91
M 機能 4 (DInt)
21-30
92-93
M 機能 5 の拡張アドレス (dual)
21-30
94-97
M 機能 5 (DInt)
21-30
98-99
S 機能 1 の拡張アドレス (dual)
21-30
100-103
S 機能 1 (Real)
21-30
104-105
S 機能 2 の拡張アドレス (dual)
21-30
106-109
S 機能 2 (Real)
21-30
110-111
S 機能 3 の拡張アドレス (dual)
21-30
112-115
S 機能 3 (Real)
21-30
116-117
T 機能 1 の拡張アドレス (dual)
21-30
118-119
T 機能 1 (Int)
21-30
120-121
T 機能 2 の拡張アドレス (dual)
21-30
122-123
T 機能 2 (Int)
21-30
124-125
T 機能 3 の拡張アドレス (dual)
21-30
126 - 127
T 機能 3 (Int)
21-30
128
D 機能 1 の拡張アドレス (dual)
21-30
129
D 機能 1 (dual)
21-30
130
D 機能 2 の拡張アドレス (dual)
21-30
131
D 機能 2 (dual)
21-30
132
D 機能 3 の拡張アドレス (dual)
21-30
133
D 機能 3 (dual)
21-30
134-135
E 機能の拡張アドレス (dual)
1-412
参照
DB 番号
ビット,バイト
名称
21-30
136
E 機能 (REAL)
21-30
140
H 機能 1 の拡張アドレス (dual)
21-30
142-145
H 機能 1 (Real 形式 )
21-30
146
H 機能 2 の拡張アドレス (dual)
21-30
148-151
H 機能 2 (Real 形式 )
21-30
152
H 機能 3 の拡張アドレス (dual)
21-30
154-157
H 機能 3 (Real 形式 )
21-30
158
F 機能 1 の拡張アドレス (dual)
21-30
160-163
F 機能 1 (Real 形式 )
21-30
164
F 機能 2 の拡張アドレス (dual)
21-30
166-169
F 機能 2 (Real 形式 )
21-30
170
F 機能 3 の拡張アドレス (dual)
21-30
172-175
F 機能 3 (Real 形式 )
21-30
176
F 機能 4 の拡張アドレス (dual)
21-30
178-181
F 機能 4 (Real 形式 )
21-30
182
F 機能 5 の拡張アドレス (dual)
21-30
184-187
F 機能 5 (Real 形式 )
21-30
188
F 機能 6 の拡張アドレス (dual)
21-30
190-193
F 機能 6 (Real 形式 )
21-30
194.0-194.7
動的 M 機能 : M00 ~ M07
21-30
195.0-195.7
動的 M 機能 : M08 ~ M15
21-30
196.0-196.7
動的 M 機能 : M16 ~ M23
21-30
197.0-197.7
動的 M 機能 : M24 ~ M31
21-30
198.0-198.7
動的 M 機能 : M32 ~ M39
21-30
199.0-199.7
動的 M 機能 : M40 ~ M47
21-30
200.0-200.7
動的 M 機能 : M48 ~ M55
21-30
201.0-201.7
動的 M 機能 : M56 ~ M63
21-30
201.0-202.7
動的 M 機能 : M64 ~ M71
21-30
201.0-203.7
動的 M 機能 : M72 ~ M79
21-30
204.0-204.7
動的 M 機能 : M80 ~ M87
21-30
205.0-205.7
動的 M 機能 : M88 ~ M95
21-30
206.0-206.3
動的 M 機能 : M96 ~ M99
DB 番号
ビット,バイト
名称
軸別
31-61
DBD 78
F 機能の値
31-61
DBD 86
M 機能の値
31-61
DBD 88
S 機能の値
1-413
参照
参照
■ マシンデータ
番号
識別子
名称
参照
一般事項 ($MN_ ... )
11100
AUXFU_MAXNUM_GROUP_ASSIG
N
補助機能グループに分散されている補助機能の
数
11110
AUXFU_GROUP_SPEC[n]
補助機能グループの仕様
チャンネル別 ($MC_ ... )
20110
RESET_MODE_MASK
パートプログラムスタート後の制御初期設定値
の定義
1.11 (K2)
20112
START_MODE_MASK
電源投入後,および,リセットまたはパートプ
ログラムエンド時の制御初期設定値の定義
1.11 (K2)
20270
CUTTING_EDGE_DEFAULT
プログラミングなしのツール切削エッジの基本
設定値
1.19 (W1)
20800
SPF_END_TO_VDI
PLC に送信されるサブプログラムエンド
22000
AUXFU_ASSIGN_GROUP[n]
補助機能グループ
22010
AUXFU_ASSIGN_TYPE[n]
補助機能タイプ
22020
AUXFU_ASSIGN_EXTENSION[n]
補助機能拡張
22030
AUXFU_ASSIGN_VALUE[n]
補助機能値
22100
AUXFU_QUICK_BLOCKCHANGE
遅延のないブロックチェンジ
22110
AUXFU_H_TYPE_INT
H 補助機能のタイプ
22200
AUXFU_M_SYNC_TYPE
M 機能の出力時間
22210
AUXFU_S_SYNC_TYPE
S 機能の出力時間
22220
AUXFU_T_SYNC_TYPE
T 機能の出力時間
22230
AUXFU_H_SYNC_TYPE
H 機能の出力時間
22240
AUXFU_F_SYNC_TYPE
F 機能の出力時間
22250
AUXFU_D_SYNC_TYPE
D 機能の出力時間
22300
AUXFU_AT_BLOCK_SEARCH_END
ブロックサーチ後の補助機能出力 ( SW バー
ジョン 4 以降では無関係 )
1-414
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいはシステムのオンラインヘルプ
1-415
1-416
1.10 運転モードの種類とプログラム運転モード (K1)
1.10.1 概略説明
モードグループ
モードグループは,1 つのユニットを構成するようプログラムされているマシン
軸,スピンドルおよびチャンネルの集まりです。原則的に,1 つのモードグループ
は,1 つの独立した NC 制御装置(いくつかのチャンネルが付いた)に相当しま
す。モードグループは,常に同じモードで同時に動作しなければならないチャン
ネルから構成されています。
(注)1 つのモードグループが標準として提供されています。
チャンネル
どのチャンネルにも自身のプログラムデコーディングファンクション,ブロック
準備ファンクションおよび補間ファンクションが備わっています。1 つのチャンネ
ルは,独立して 1 つのパートプログラムを処理できます。
(注)1 つのチャンネルが標準として提供されています。
プログラム動作モード
「プログラム動作モード」という用語は,パートプログラムあるいはパートプログ
ラムブロックが AUTOMATIC モードか MDA モードのどちらかで処理されるス
テータスのことをいいます。プログラムの処理は,PLC インタフェース信号およ
びコマンドを使用して修正できます。
非同期サブプログラム (ASUP),割込みルーチン
SW 4 以降
割込み入力を使用すると,NCK は,割込みルーチンあるいは ASUP 中のより緊急
のイベントに対応できるよう,NC 中の現在の処理オペレーションを中断すること
ができます。
外部メモリからの外部サブプログラムの処理
SW 4 以降,MMC 102/103 にのみ適用
複雑なワークピースを加工するために,プログラムコマンド EXTCALL を使用し
て,サブプログラムをハードディスクからロードし,処理することができます。
1-417
1.10.2 詳細説明
■ モードグループ
モードグループ
モードグループ(1.10.3 「補足条件」を参照)は,NC チャンネルを軸とスピンド
ルに組合わせて,1 つの加工ユニットを構成しています。
モードグループには,同一モードで常に動作しなければならないチャンネルがす
べて含まれています。
任意の軸を,あるモードグループの任意のチャンネルにプログラムすることがで
きます。そのため,1 つのモードグループは,1 つの独立した,複数チャンネルの
NC に相当します。
(注)次の説明は,モードグループが 1 つでチャンネルも 1 つの場
合です。
複数のチャンネルを必要とするファンクション(例,軸の置換)について
は,次の参照で説明しています。
参照: 2.6 チャンネル間の協調運転と制御軸入替え (K5)
モードグループの割当て
モードグループを構成するために組合わせる,チャンネル,ジオメトリ軸,マシ
ン軸およびスピンドルは,モードグループ構成によって定義します。
モードグループは,他のモードグループに割当てられてはならない 1 つあるいは
複数のチャンネルから構成されています。軸は,別のモードグループの別のチャ
ンネルに割当てることができます。軸はこれらのチャンネル間で交換できます。
軸交換はモードグループから独立しています。
マシン軸が 1 つのチャンネルに割当てられた場合,この軸はジオメトリ軸と定義
できます。ジオメトリ軸と定義されないチャンネル軸は,位置決め軸,PLC 軸,
コマンド軸として使用できます。
モードグループは次のデータを使用して構成されます。
• チャンネル別 MD 10010: ASSIGN_CHAN_TO_MODE_GROUP
(モードグループで有効なチャンネル)
• チャンネルの構成データ
モードグループの修正
モードグループの構成を,割当てられたチャンネルについて修正した場合,修正
は電源オンするまでアクティブになりません。修正は,MD 10010:
ASSIGN_CHAN_TO_MODE_GROUP で行います。
1-418
インタフェース信号
モードグループへの/モードグループからの信号を,ユーザインタフェースの
DB11 に転送します。これで,モードグループを PLC あるいは NCK によって監視
できます。信号については 1.10.5 「信号の説明」で説明します。
マシンデータ
モードグループ別のマシンデータはありません。
■ モードグループ停止
モードグループ停止
IS "Mode group stop"(モードグループ停止)(DB11, ... DBX0.5) および IS "Mode
group stop axes plus spindles"(モードグループ停止軸プラススピンドル)(DB11, ...
DBX0.6) は,停止信号(NC 停止に相当する)をモードグループ中のすべてのチャ
ンネルに適用するために使用できます。使用したインタフェース信号に基づいて,
チャンネルの軸だけが,あるいは軸とスピンドルの両方が停止します。
■ モードグループリセット
モードグループリセットの説明
IS "Mode group reset"(モードグループリセット)(DB11, ... DBX0.7) を起動すると,
モードグループ中の各チャンネルに対して内部のチャンネル別リセットが有効に
なります。この信号をセットするときのチャンネルのプログラムステータスは
様々です。そのため,それぞれのチャンネルがこのチャンネル別リセットを実行
するときも様々です。チャンネル別リセットは,チャンネル別インタフェースに
は送られません。
新規のチャンネル別スタートコマンドは,モードグループリセットが完了するま
で実行できません。このステータスは,IS "All channels in Reset state"(リセットス
テータスの全チャンネル)(DB11, ... DBX6.7) で表示されます。
モードグループステータス
モードグループ内のチャンネルのステータスはチャンネルによって異なりますが,
モードグループリセットコマンドによってチャンネルは常にリセットされます。
モードグループリセットを実行すると,モードグループのすべてのチャンネルが
リセットステータスに入ります。新規のチャンネル別スタートコマンドは,モー
ドグループリセットが完了してからでないと実行できません。
1-419
コマンドの実行
IS "Mode group reset"(モードグループリセット)(DB11, ... DBX0.7) は,モードグ
ループに割当てられたチャンネル中のアクティブなパートプログラムをすべて終
了します。
IS "Mode group Reset"(モードグループリセット)がトリガされると,次のアク
ションを実行します。
• 個々のチャンネル中のパートプログラム準備が直ちに停止します。
• チャンネルの軸とスピンドルが,セットされた減速ランプに沿って減速します。
• 個々のチャンネルあるいは現在のブロックからのペンディング補助ファンク
ションがそれ以上出力されません。
• チャンネルのブロックポインタが,そのパートプログラムの最初に戻ります。
• リセットアラームをすべて画面から削除します。
• IS "All channels in Reset state"(リセットステータスの全チャンネル)(DB11, ...
DBX6.7) がセットされると直ちに,モードグループリセットが完了します。
モードグループレディ
モードグループの操作準備完了ステータスは,IS "Mode group Ready"(モードグ
ループレディ)(DB11, ... DBX6.3) で表示されます。
1-420
■ チャンネル
チャンネル
1 つのチャンネル(1.10.3 「補足条件」を参照 ) は,最大 1 つのパートプログラム
を処理できる 1 つの "NC" に相当します。マシン軸,ジオメトリ軸,位置決め軸の
チャンネルへの割当ては,マシン構成によって決まります。
各チャンネルには,自身の補間器がシステムによってプログラム処理で割当てられ
ます。各チャンネルは,PLC で制御される自身の加工プログラムを実行できます。
次のチャンネル別ファンクションにより,チャンネルは他のチャンネルとは独立
してパートプログラムを処理することができます。
• 各チャンネルには,自身の NC スタート,NC 停止,リセットを備えています
• 1 つのチャンネルにつき 1 つのフィードレートおよび早送りオーバライド
• チャンネル別アラーム表示
• 各チャンネルの現在の加工ステータス(軸位置,現在の G ファンクション,補
助ファンクション,現在のプログラムブロック)の表示
• チャンネル別プログラム制御ファンクション
これらのファンクション(表示ファンクションを除く)は,PLC がインタフェー
ス信号を使用して,制御およびチェックします。
同一のモードグループ中のチャンネルは,常に同一のモード (AUTOMATIC,JOG,
MDA) で操作しなければなりません。
チャンネル構成
個別のチャンネル名を,MD 20000:CHAN_NAME(チャンネル名)で,チャンネ
ルに割当てることができます。その後,マシンデータによって様々な軸が利用で
きるチャンネルに割当てられます。ジオメトリ軸とマシン軸は恒久的に 1 つの
チャンネルに割当てられます(1 つのチャンネルにつき最大 3 つのジオメトリ軸)
。
マシン軸は,複数のチャンネルで同時にアクティブであってはなりません。
参照: 1.11 軸構成及び座標系 (K2)
次のチャンネル別設定も同様に,マシンデータで設定できます。
• MD 20150:GCODE_RESET_VALUES(G グループの初期設定)による G グルー
プの初期設定あるいは基本プログラミング設定。
• 補助ファンクショングループの構成および出力時間。関連 MD,チャンネルの
補助ファンクション設定については 1.10.7「■チャンネルの補助ファンクショ
ン設定」を参照。
• マシン軸とジオメトリ軸の変換条件。関連 MD,チャンネル中の変換定義につ
いては 1.10.7「■チャンネル中の変換の定義」を参照。
• MD 20150 パートプログラムの処理に関する他の設定については,関連 MD,
チャンネルの基本マシンデータを説明した 1.10.7「■チャンネルの基本マシン
データ」を参照。
1-421
チャンネル割当ての変更
チャンネル構成は,パートプログラムをプログラムし直したり,PLC ユーザプロ
グラムを変更したりすることによって,オンラインで変更することはできません。
マシンデータを使用することによってのみ変更が可能です。こうした変更は,電
源オンするまで有効になりません。
インタフェース信号
NCK チャンネル 1 信号は,ユーザインタフェースの DB21 に,NCK チャンネル 2
信号は DB22 にあります。チャンネルは,PLC あるいは NCK によって監視および
制御できます。チャンネル信号については 1.10.5 「信号の説明」で説明します。
マシンデータ
チャンネル別マシンデータについては,1.10.7 「データフィールド , リスト」にリ
ストがあります。
1-422
■ 動作モード
次の動作モードが利用できます。
AUTOMATIC
• パートプログラムの自動処理
• モードグループのすべてのチャンネルを同時にアクティブにできます
JOG
• ハンドルあるいは送りキーを使用して,軸を手動で送ることができます
• チャンネル別信号およびインタロックは無視されます
• モードグループ中のすべてのチャンネルをアクティブにできます
MDA
• パートプログラムおよびパートプログラムセクションの自動処理を制限します
• パートプログラムテスト
• 1 つのモードグループにつき最大 1 つのチャンネルをアクティブにできます
(TEACH IN にのみ適用)
• 軸を手動で送ることができます
選択
ユーザは,オペレータインタフェース上のソフトキーを使用して,希望する動作
モードを選択できます。この選択は,インタフェース信号 (DB11, ... DBX4.0 to
DBX4.2) によって PLC へ転送されますが,まだ起動しません。
起動
モードグループの希望の動作モードは,DB11, ... under DBX0.0 to DBX0.2 中のイン
タフェース信号によって起動します。複数のモードを同時に選択している場合の
優先順位は次のとおりです。
• JOG ( 優先度高 )
• MDA
• AUTOMATIC ( 優先度低 )
表示
モードグループの現在の動作モードは,DB11, ... under DBX6.0 to DBX6.2 中のイン
タフェース信号によって表示されます。
1-423
可能なマシンファンクション
モード選択後,マシンファンクションを 1 つ選択でき,そのマシンファンクショ
ンはモードグループ全体でグローバルに有効となります。
JOG モードでは,次のマシンファンクションのうちの 1 つが選択できます。
• REF,( 基準点アプローチ)
参照: 1.16 原点復帰 (R1)
• REPOS,(再位置決め)
参照: YS840DI ユーザーズマニュアル・操作編
MDA モードでは,次のマシンファンクションのうちの 1 つが選択できます。
• REF,(基準点アプローチ)
参照: 1.16 原点復帰 (R1)
• REPOS,(再位置決め)
参照: YS840DI ユーザーズマニュアル・操作編
• TEACH IN,(軸位置の教示)
参照: YS840DI ユーザーズマニュアル・操作編
オペレータインタフェースからのマシンファンクションの選択は,DB11, ... under
DBX5.0 to DBX5.2 に保存されています。
選択されたマシンファンクションは,DB11, ... under DBX1.0 to DBX1.2 で起動します。
アクティブなマシンファンクションは,DB11, ... under DBX7.0 to DBX7.2 に表示さ
れます。
■ 動作モード切換え
一般事項
別の動作モードへの切換えは,モードグループインタフェース (DB11, ...) を介して
要求し,起動します。モードグループは,AUTOMATIC,JOG,あるいは MDA
モードのいずれかに入ります。つまり,1 つのモードグループ中の複数のチャンネ
ルは,同時に複数のモードを受入れることはできません。
どのモードへの移行が可能で,どのようにして移行を実行するかは,PLC プログ
ラムでマシン別に構成します。
(注)
モードは,信号 "Channel status active"(チャンネルステータスアクティブ)
がペンディング中は,内部的に変更されません。エラーフリーなモード変更
を実施するためには,すべてのチャンネルが現在正しい動作モードになって
いる必要があります。
1-424
以下の表では,1 つのチャンネル用の可能なモード変更を示しています。
表 1.11 モード変更
AUTOMATIC
JOG
AUTO
MDA
リセット
割込み
割込み
X
X
変更前
変更後
リセット
割込み
AUTOMATIC
JOG
X
X
MDA
X
X
MDA
ハンドルを使用
しない JOG
リセット
アクティブ
割込み
X
X
X
割込み
AUTO
X
X
X
可能なモード変更を "X" で示しています。
動作モード切換えエラー
動作モードの切換え要求がシステムによって拒否された場合,エラーメッセージ
"Operating mode cannot be changed until after NC stop"(動作モードは NC 停止後まで
変更できません)が出力されます。
このエラーメッセージは,チャンネルステータスを変更しなくても,クリアできます。
モード切換えディスエーブル
動作モードの切換えは,IS "Operating mode switchover disable"(動作モード切換え
ディスエーブル)(DB11, ... D0.4) を使用して禁止できます。これにより動作モード
変更要求が抑止します。
ユーザは,オペレータ用に,アクティブなモード切換えディスエーブルについて
信号を構成しなければなりません。システムは信号をセットしません。
1-425
■ 動作モード別ファンクションオプション
ファンクションの概要
動作モード別に特定のファンクションが追加されています。これらのファンク
ションは,特定の技術あるいはマシンとは関係ありません。
次の表では,すべてのファンクションを示しています。特定のモードでは,その
オペレーティングステータスに基づいて,いくつかのファンクションしか選択で
きません。
表では,どのモードおよびオペレーティングステータスで,どのファンクション
が選択できるかを示しています。
s: ファンクションをこのステータスでスタートできます
p: ファンクションをこのステータスで処理できます
MDA でチャンネルがアクティブ (JOG)
MDA interrupt 中に MDA でチャンネルがアクティブ (JOG)
チャンネルが中断
チャンネルがアクティブ
チャンネルが RESET ステータス (MDA)
チャンネルがアクティブ
チャンネルがアクティブ
MDA interrupt 中に JOG でチャンネルが中断
チャンネルが RESET ステータス (JOG)
チャンネルがアクティブ
AUTO interrupt 中に JOG でチャンネルが中断
チャンネルが中断
チャンネルがアクティブ
チャンネルが RESET ステータス (AUTOMATIC)
表 1.12 モード別ファンクションオプション
NCK 別ファンクション
パートプログラムを NCK にロードする
sp sp sp sp sp sp sp sp sp sp sp sp sp sp
モード別ファンクション
s
オーバストア
モード別単一ブロック(タイプ A /タイプ B) s
s
b
s sp
s
s sp
s
s
チャンネル別ファンクション
パートプログラムの実行
s
s
b
ブロックサーチ
s
s
b
s
輪郭での再位置決め
b
b
割込みルーチン
sp
pp コマンドを使用した基準点アプローチ
sp
sp
pp コマンドを使用した測定
sp
sp
1-426
■ 動作モード別監視ファンクション
監視ファンクションの概要
動作モード別に,種々の監視ファンクションがアクティブになります。これらの
監視ファンクションは,特定の技術あるいはマシンとは関係ありません。
次の表ではすべての監視ファンクションを示しています。特定のモードでは,その
オペレーティングステータスに基づいて,これらの監視ファンクションのうちの一
部しかアクティブになりません。次の表は,どのモードおよびオペレーティングス
テータスで,どの監視ファンクションがアクティブになるかを示しています。
x: 監視はこのステータスでアクティブになります
MDA interrupt 中に MDA でチャンネルがアクティブ (JOG)
x
x
x x x
第 1 /第 2 SW リミットスイッチ -
x
x
x
x
x x x
MDA でチャンネルがアクティブ (JOG)
x
チャンネルが中断
チャンネルがアクティブ
チャンネルがアクティブ
x
チャンネルが RESET ステータス (MDA)
チャンネルがアクティブ
MDA interrupt 中に JOG でチャンネルが中断
第 1 /第 2 SW リミットスイッチ +
チャンネルが RESET ステータス (JOG)
チャンネルがアクティブ
AUTO interrupt 中に JOG でチャンネルが中断
チャンネルが RESET ステータス (AUTOMATIC)
チャンネルが中断
チャンネルがアクティブ
表 1.13 モード別監視ファンクションオプション
軸別監視
HW リミットスイッチ +
x x x
x x x x x x
x x x x x
HW リミットスイッチ -
x x x
x x x x x x
x x x x x
作業エリア制限 +
x
x
x
x
x x x
作業エリア制限 -
x
x
x
x
x x x
正確停止粗/微
x x x
x x x x x x
x x x x x
クランピング公差
x x x
x x x x x x
x x x x x
DAC 制限
x x x
x x x x x x
x x x x x
輪郭監視
x
x
x
x
x
x
x
x x x
スピンドル別監視
速度リミット超過
x
スピンドルが静止
x x x
同期化したスピンドル
x
速度がセットポイント範囲内
x
最大許容速度
エンコーダリミット周波数
1-427
x x x x x x
x
x
x x x x x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
■ 動作モード別インタロック
インタロックの概要
動作モード別に,種々のインタロックをアクティブにできます。これらのインタ
ロックは,特定の技術あるいはマシンとは関係ありません。
次の表では,可能なインタロックオプションをすべて示しています。いくつかの
インタロックは,オペレーティングステータスに基づいて,すべてのモードで起
動できます。
次の表は,どのモードおよびオペレーティングステータスで,どのインタロック
MDA でチャンネルがアクティブ (JOG)
MDA interrupt 中に MDA でチャンネルがアクティブ (JOG)
チャンネルが中断
チャンネルがアクティブ
チャンネルが RESET ステータス (MDA)
チャンネルがアクティブ
チャンネルがアクティブ
MDA interrupt 中に JOG でチャンネルが中断
チャンネルがアクティブ
AUTO interrupt 中に JOG でチャンネルが中断
チャンネルが RESET ステータス (JOG)
チャンネルが中断
チャンネルがアクティブ
チャンネルが RESET ステータス (AUTOMATIC)
が起動できるかを示しています。
NCK 別インタロック
NC レディ
x x x
x x x x x x
x x x x x
モードレディ
x x x
x x x x x x
x x x x x
モード変更ディスエーブル
x x x
x x x x x x
x x x x x
モード別インタロック
チャンネル別インタロック
フィードホールド
x
x x x
NC スタートディスエーブル
x x x
x
x x x x x x
x
x
x x x x x
読込み
ディスエーブル
x x x
x x x x x x
x x x x x
フォローアップモード
x x x
x x x x x x
x x x x x
軸別インタロック
スピンドルディスエーブル
x x x
x x x x x x
x x x x x
パーキング軸
x x x
x x x x x x
x x x x x
サーボディスエーブル
x x x
x x x x x x
x x x x x
軸ディスエーブル
x x x
x x x x x x
x x x x x
サーボディスエーブル
x x x
x x x x x x
x x x x x
スピンドルディスエーブル
x x x
x x x x x x
x x x x x
スピンドル別インタロック
x: インタロックをこのステータスで起動できる
1-428
■ プログラムテスト
目的
新しいパートプログラムをテストする際に,いくつかの制御機能が利用できます。
これらのファンクションは,マシンへの危険およびテスト段階で必要とする時間
を減少するために提供されています。よりよい結果を得るために,複数のプログ
ラム機能を同時に起動することができます。
次のテストオプションについて以下で説明しています。
• 軸モーションのないプログラム処理
• シングルブロックモードでのプログラム処理
• ドライランフィードレートを使用したプログラム処理
• 特定のプログラムセクションの処理
• 特定のプログラム部分のスキップ
■ 軸動作のないプログラム実行
機能性
このファンクションがアクティブなとき,IS "NC start"(NC スタート)(DB21, ...
DBX7.1) を使用して,パートプログラムをスタートおよび実行することができま
す。つまり,補助機能出力,待機時間,G ファンクション出力などを使用します。
ソフトウェアリミットスイッチ,作業エリア制限などの安全ファンクションは有
効なままです。
通常のプログラムオペレーションとの唯一の違いは,すべての軸(スピンドルで
はなく)に対して軸ディスエーブルがセットされるということです。マシン軸は
移動せず,実際値は,出力されないセットポイントから内部的に生成されます。
プログラムされた速度は変化しないままです。これは,オペレータインタフェー
スに出力される位置および速度情報が,通常のパートプログラムオペレーション
中に出力される情報と全く同じであるということを意味しています。
このファンクションがアクティブなときは,位置制御が中断することはないので,こ
のファンクションがスイッチオフされたときに,軸を基準化する必要はありません。
ツール管理
軸ディスエーブルのために,ツールマガジンの割当てはプログラムテスト中に変
更されません。PLC アプリケーションは,ツール管理システムのデータとマガジ
ンのデータの完全性が失われていないということを保証しなければなりません。
ツールボックスディスケット上の基本 PLC プログラムの例を参照してください。
利点
ユーザは,パートプログラムのプログラムされた軸位置および補助機能出力を
チェックできます。
1-429
選択
このファンクションは,Program control(プログラム制御)メニューで,オペレー
タインタフェースを介して選択します。IS "Program test selected"(プログラムテス
ト選択)(DB21, ... DBX25.7) が,ファンクション選択時にセットされます。しか
し,これによってファンクションが起動するわけではありません。
起動
このファンクションは,IS "Activate program test"(プログラムテストの起動)
(DB21, ... DBX1.7) によって起動します。
表示
アクティブなプログラムテストに対するチェックバックとして,オペレータイン
タフェース上の適切なフィールドが反転表示され,IS "Program test active"(プログ
ラムテストアクティブ)(DB21, ... DBX33.7) が PLC にセットされます。
(注)
イグザクトストップ信号 (DB 31-61, DBX60.6, DBX60.7) は,マシンの実際の
ステータスを反映します。軸がセットした位置から押出されてずれた場合に
のみ,これらの信号をプログラムテスト中にキャンセルできます(セットし
た位置は,プログラムテスト中は一定のままです)。PLC は,"Program test
active"(プログラムテストアクティブ)信号 (DB21, ... DBX33.7) を使用して,
テスト中にこれらの信号に対する応答を決定できます。
軸動作のないプログラム処理は,ファンクションドライランフィードレート
を使用しても起動できます。このファンクションを使用すると,フィード
レートが小さいパートプログラムセクションをより短時間で処理できます。
■ シングルブロックモードでのプログラム処理
機能性
パートプログラムは,IS "NC Start"(NC スタート)(DB21, ... DBX7.1) を使用して
スタートできます。
ファンクション「シングルブロック」を起動すると,パートプログラムは,処理
中のプログラムブロックごとに停止します。カッタ半径パス補償あるいはツール
ノーズ半径補償がアクティブな場合は,制御装置によって挿入した中間ブロック
ごとに処理を停止します。
プログラムステータスは,"Program status stopped"(プログラムステータス停止)
に切換わります。チャンネルステータスはアクティブなままです。
その次のパートプログラムブロックは,NC スタート時に処理されます。
1-430
シングルブロックのタイプ
次の 2 タイプのシングルブロックが提供されています。
• シングルブロックのデコーディング
このタイプのシングルブロックを使用すると,パートプログラム中のすべての
ブロック(送り動作のない純粋な計算ブロックであっても)が "NC Start"(NC
スタート)によって逐次的に処理されます。
• シングルブロック動作
このタイプを使用すると,アクション(送り動作,補助機能出力など)を開始
するすべてのブロックが個別に処理されます。デコーディング(例,鋭角で
カッタ半径パス補償)中に生成されるブロックも,シングルブロックモードで
処理されます。しかし,計算ブロックはアクションをトリガしないので,計算
ブロックで処理を停止しません。
シングルアクションブロックは初期設定です。
シングルブロックモードの選択については,次を参照してください。
参照: YS840DI ユーザーズマニュアル・操作編
注意
• ドライランフィードレートを選択している場合,シングルブロックモード
は,一連の G33 ブロックに影響を与えます。
• 計算ブロックはシングルステップモードでは処理されません(シングルデ
コーディングブロックがアクティブな場合のみ)。
利点
個々の加工ステップをチェックするために,ユーザはパートプログラムを 1 ブ
ロックずつ処理できます。処理したパートプログラムブロックが正確であると
ユーザが一旦判断すると,次のブロックを呼出すことができます。これは NC ス
タートをトリガして実行します。
選択
シングルブロックモードは,Program control(プログラム制御)メニューで,オペ
レータインタフェースを介して選択します。IS "Single block selected"(シングルブ
ロック選択)(DB21, ... DBX24.4) が,ファンクション選択時にセットされます。し
かし,ファンクションは起動しません。
起動
このファンクションは,IS "Activate single block"(シングルブロックの起動)
(DB21, ... DBX0.4) によって起動します。
表示
シングルブロックモードがアクティブであるというステータス信号は,オペレー
タインタフェース上の関連フィールドが反転することによって示されます。シン
グルブロックモードの結果,パートプログラム処理ルーチンがパートプログラム
ブロックを 1 つ処理すると直ちに,IS "Program status interrupted"(プログラムス
1-431
テータス中断)(DB21, ... DBX35.3) がセットされます。
シングルブロックモードを選択していても,特定のオペレーションについて連続
的なプログラム実行が必要となる場合があります。MD 10702:
IGNORE_SINGLEBLOCK_MASK では,どのルーチンを中断せずに処理しなければ
ならないかを指定します。
• 内部 ASUP
• ユーザ ASUP
• DISPLOF を使用したサブプログラム
• 中間ブロック
• ブロックサーチグループブロック
• 初期ブロック
• 再編成できないブロック
• 再位置決めできないブロック
• 移動情報のない位置決めブロック
オペレーション間の割当ておよびマシンデータのビットについては 1.10.4「■一般
マシンデータ」を参照してください。
■ ドライラン送り速度を使用したプログラムの実行
機能性
パートプログラムは,IS "NC Start"(NC スタート)(DB21, ... DBX7.1) によってス
タートできます。このファンクションがアクティブなとき,G01,G02,G03,
G33,G34 および G35 に関連してプログラムされた送り速度が,SD 42100 に保存
されているフィード値に置換えられます。ドライラン送り速度はまた,プログラ
ムブロック中にプログラムされた回転送り速度を G95 に置換えます。
危険
ドライラン送り速度をアクティブにしたままでワークピースを加工してはな
りません。誤った送り速度が原因でツール切削レートがオーバし,ワーク
ピースあるいは工作機械が損傷する可能性があります。
選択
ドライラン送り速度は,Program control(プログラム制御)メニューで,オペレー
タインタフェースを介して選択します。IS "Dry run feedrate"(ドライランフィード
レート)(DB21, ... DBX24.6) は,ファンクション選択時にセットされます。しか
し,ファンクションは起動しません。また,要求されたドライラン送り速度は,
Setting data/JOG data メニューに入力しなければなりません。
起動
このファンクションは,IS "Activate dry run feedrate"(ドライランフィードレート
の起動)(DB21, ... DBX0.6) で起動します。
1-432
表示
ドライラン送り速度がアクティブであるというステータス信号は,オペレータイ
ンタフェース上の関連フィールドが反転することによって示されます。
■ ブロックサーチ:特定のプログラムセクションの実行
機能性
コントローラをパートプログラム中の特定のブロックにセットするためには,特
定のブロックの最後にジャンプするブロックサーチファンクションを使用できま
す。ブロックサーチ中に通常のプログラムモードの場合と同じ計算を実行するか
どうかを選択することもできます。
ブロックサーチ後,IS "NC Start"(NC スタート)(DB21, DBX7.1) を使用してプロ
グラムをスタートできます。
選択,起動
ブロックサーチは,オペレータインタフェース上の,AUTOMATIC モードで選択
します。
次に示すファンクション用のソフトキーを使用してブロックサーチを起動できま
す。
• 計算した場合の輪郭へのブロックサーチ
輪郭にアプローチするために,どのような状況でも使用できます。NC スター
ト時に,目標ブロックのスタート位置か,目標ブロックの 直前のブロックの
エンド位置がアプローチされます。これはエンド位置までトラバースされま
す。処理は輪郭まで正しく行われます。
• 計算した場合のブロック終点へのブロックサーチ
目標位置(例,ツールチェンジ位置)にアプローチするために,どのような状
況でも使用できます。目標ブロックのエンド位置かその次のプログラムされた
位置が,目標ブロックで有効な補間タイプを使用してアプローチされます。こ
れは輪郭まで真ではありません。目標ブロックでプログラムされた軸しか移動
しません。必要であれば,衝突フリーなスタート位置に JOG-REPOS を使用し
て手動でアプローチできます。
• 計算しない場合のブロックサーチ
メインプログラムでの急速サーチ用に使用します。
計算は行われません。内部コントローラ値は,サーチ前に有効なステータスを
示しています。
例:1.10.6 「例」を参照
表示
現在のブロックウィンドウには目標ブロックが表示されます。
1-433
インタフェース信号
PLC のインタフェース信号
• "Block search active"(ブロックサーチアクティブ)(DB21, ... DBX33.4)
• "Action block active"(アクションブロックアクティブ)(DB21, ... DBX32.3)
• "Approach block active"(アプローチブロックアクティブ)(DB21, ... DBX32.4)
• "Last action block active"(最後のアクションブロックアクティブ)(DB21, ...
DBX32.6)
• "PLC action terminated"(PLC アクション終了)(DB21, ... DBX1.6)
は,以下の表 1.11 に示す順番でイネーブルされます。
(注)"Approach block active"(アプローチブロックアクティブ)信
号は,「計算した場合の輪郭へのブロックサーチ」を使用した
場合にしかイネーブルされません。なぜなら,
「計算した場合
のブロック終点へのブロックサーチ」を使用した場合は,別
のアプローチブロックが生成されないからです(アプローチ
ブロックとターゲットブロックは同じです)
。
サーチ
スタート
サーチ
ターゲット
発見
NC スタート
アクション
ブロック出力
最後の
アクション
ブロック
NC スタート
アプローチ
ブロックの
出力
メインラン中の
ターゲット
ブロック
Block search active
(ブロックサーチアクティブ)
(DB21, ... DBX33.4)
Action block active
(アクションブロックアクティブ)
(DB21, ... DBX32.3)
Approach block active
(アプローチブロックアクティブ)
(DB21, ... DBX32.4)
Last action block active
(最後のアクションブロックアク
ティブ)(DB21, ... DBX32.6)
PLC action terminated
(PLC アクション終了)
(DB21, ... DBX1.6)
図 1.70 インタフェース信号の順番
「計算した場合のブロック終点へのブロックサーチ」後,"Last action block active"
(最後のアクションブロックアクティブ)時から NC スタート時にパートプログラ
ム処理が再開するまで,REPOS パートプログラムコマンドによる自動再位置決め
は実行されません。
アプローチ動作の始点は,NC スタート時の現在の軸位置です。終点は,パートプ
ログラムの処理によって生じます。
1-434
アクションブロック
アクションブロックには,「計算した場合のブロックサーチ」中に収集したアク
ション,たとえば,補助機能出力,ツール (T,D) プログラミングコマンド,スピ
ンドル (S) プログラミングコマンド,およびフィードプログラミングコマンドが含
まれます。
「計算した場合のブロックサーチ」
(輪郭あるいはブロック終点)中に,M ファンク
ション出力などのアクションが,いわゆる 「アクションブロック」に収集されま
す。これらのブロックは,
「サーチ目標発見」後の NC スタート時に出力されます。
(注)収集したスピンドルプログラミングコマンド (S 値,M3/M4/
M5,SPOS) は,アクションブロックによって起動します。
PLC ユーザプログラムは,ツールが操作できるということと,
必要であれば,スピンドルプログラミングが PLC 信号
"spindle reset"(スピンドルリセット)DB 31...DBX 2.2 によっ
てリセットされるということを保証しなければなりません。
MD 10702 IGNORE_SINGLEBLOCK_MASK () のビット 3 をセットすることによっ
て,単一ブロックモードで,アクションブロックごとに停止することを防止でき
ます。
参照: 1.9 補助機能出力(H2)
ブロックサーチ後の PLC アクション
インタフェース信号 "Last action block active"(最後のアクションブロックアクティ
ブ)を使用すると,たとえば,定義された位置で ASUP あるいは FC をスタートす
るために,PLC アクションがブロックサーチ後にトリガされます。この信号は,
すべてのアクションを実行し,PLC アクション (ASUP,FC) あるいはオペレータ
アクション(オーバライド,JOG/REPOS を使用したモード変更)を実行できる状
態であるということを示しています。この信号を使用することにより,PLC は,
たとえば,動作をスタートする前に,別のツール変更を実行できます。
このときにアラーム 10208 も同様にデフォルト応答として出力されます。このア
ラームの目的は,プログラム処理を再開するために NC スタートが必要である,と
いうことをユーザに示すことです。マシンデータ MD 11450: SEARCH_RUN_MODE
を使用すると,別の応答をセットすることができます。MD 11450=1 の場合,PLC
がインタフェース信号 "PLC action terminated"(PLC アクション終了)をセットす
ることによってこのことを示すまで,アラーム 10208 は出力されません。
条件
アプローチ動作「計算した場合のブロック終点へのサーチ」は,目標ブロックで
有効な補間タイプを使用して実行します。この補間は G0 か G1 にすべきです。他
のタイプの補間を使用すると,アプローチ動作はアラームを伴って強制終了しま
す(例,G2/G3 の場合の円終点エラー)
。
1-435
(注)ブロックサーチファンクション関する詳細情報は,次を参照
してください。
参照: /BA/, Operator’s Guide
■ 特定のパートプログラムブロックの抑止
ファンクション
新しいプログラムをテストする際,プログラム処理中に特定のパートプログラム
ブロックをディスエーブルあるいはスキップできて便利です。
メインプログラム/サブプログラム
%100
N10 ...
N20 ...
N30 ...
処理中の
プログラム
/N40 ...
/N50 ...
N60 ...
ブロック N40 と N50 は処
理中にスキップされる
N70 ...
N80 ...
N90 ...
N100 ...
N110 ...
N120 M30
図 1.71 パートプログラムブロックのスキップ
選択
スキップファンクションは,Program control メニューで,オペレータインタフェー
スを介して選択します。IS "Skip block selected"(スキップブロック選択)(DB21,
DBX26.0) が,このファンクションを選択したときにセットされます。しかし,
ファンクションは起動しません。スキップしたいブロックの最初に斜線「/」を付
ける必要があります(図 1.71 を参照)。
起動
このファンクションは,IS "Activate skip block"(スキップブロックの起動)(DB21,
... DBX2.0) によって起動します。
表示
ファンクション "Skip block"(スキップブロック)が起動したということを示すた
めに,オペレータインタフェース上のステータス行中の関連フィールドが反転表
示します。
1-436
■ プログラム動作モード
定義
プログラム動作モードは,パートプログラムあるいはパートプログラムブロック
を AUTOMATIC モードあるいは MDA モードで処理する際に使用します。
チャンネル制御
すべてのチャンネルは,PLC からのインタフェース信号を使用して制御できます。
これらの信号は,モードグループ別インタフェース信号かチャンネル別インタ
フェース信号のどちらかです。
信号の概要については,本ファンクション説明の 1.10.5 「信号の説明」を参照して
ください。
ステータスメッセージ
各チャンネルは,現在のプログラムオペレーションステータスを,インタフェー
ス信号を使用して PLC に通知します。これらの信号は,モードグループ別信号と
チャンネル別信号に分かれています。信号の概要については,本ファンクション
説明の 1.10.7 「■チャンネルマシンデータ」と「■軸/スピンドル別マシンデー
タ」を参照してください。
■ 初期設定
初期設定
初期設定は,各チャンネルごとにチャンネル別マシンデータでプログラムできま
す。初期設定は,たとえば,G グループおよび補助ファンクション出力に影響を
与えます。
補助ファンクション出力
補助ファンクションの出力のタイミングは,マシンデータ AUXFU_x_SYNC_TYPE
(MD 22200, 22210, 22220, 22230, 22240, 22250, 22260),(M, S, T, H, F, D, E ファンク
ション用の出力タイミング ) を使用して予め決めておくことができます。詳細情報
については,次を参照してください。
参照: 1.9 補助機能出力 (H2)
1-437
G グループ
初期プログラミング設定は,MD 20150: GCODE_RESET_VALUES (G グループの初
期設定 ) を使用して,現行の G グループのそれぞれについて予めセットできます。
この初期設定は,プログラムスタート中に自動的にアクティブになるか,あるい
は同じ G グループからの G コマンドによって選択解除されるまでリセットに入っ
ています。
G コードの PLC インタフェースへの出力は,MD 22510: GCODE_GROUPS_TO_PLC
( ブロック変更/リセット時に NCK-PLC インタフェースへ出力される G コード )
で起動できます。
G グループおよびその G ファンクションのリストと説明については,次を参照し
てください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
■ パートプログラムの選択
チャンネルステータス
パートプログラムの選択は,そのパートプログラムに関連するチャンネルがリ
セットステータスにある場合にのみ可能です。
■ パートプログラムあるいはパートプログラムブロックのスタート
START コマンド,チャンネルステータス
パートプログラムあるいはパートプログラムブロックの処理を開始するための
START コマンドには次の 2 つがあります。
• チャンネル別 IS "NC Start"(NC スタート)(DB21, ... DBX7.1) は,通常マシン制
御パネルキー NC Start で制御されていますが,同一チャンネル中のプログラム
処理をスタートします。
• NC インストラクション START を使用すると,たとえば,最初のチャンネルの
プログラム処理を,2 つめのチャンネルからスタートできます(詳細情報につ
いては,チャンネル同期のセクションを参照してください)。
START コマンドは,AUTOMATIC モードおよび MDA モードでしか実行できません。
START コマンドを実行するためには,関連するチャンネルが "Channel status reset"
(チャンネルステータスリセット)(DB21, ... DBX35.7) あるいは "Channel status
interrupted"(チャンネルステータス中断)(DB21, ... DBX35.6) に入っていなければな
りません。
1-438
要求される信号ステータス
次に示す信号ステータスがマシン上に存在する場合にのみ,START コマンドは
パートプログラムにチャンネルでの処理を許可します。
関連イネーブル信号設定:
• IS "Mode group ready"(モードグループレディ)が出ていなければなりません
(DB11, ... DBX4.4)
• IS "Mode group reset"(モードグループリセット)が出ていてはなりません
(DB11, ... DBX0.7)
• IS "Activate program test"(プログラムテストの起動)が出ていてはなりません
(DB21, ... DBX1.7)
• IS "NC Start disable"(NC スタートディスエーブル)が出ていてはなりません
(DB21, ... DBX7.0)
• IS "NC stop at block limit"(ブロックリミットでの NC ストップ)が出ていては
なりません (DB21, ... DBX7.2)
• IS "NC Stop"(NC 停止)が出ていてはなりません (DB21, ... DBX7.3)
• IS "NC Stop axes plus spindle"(NC 停止軸プラススピンドル)が出ていてはなり
ません (DB21, ... DBX7.4)
• IS "Reset"(リセット)が出ていてはなりません (DB21, ... DBX7.7)
• IS "EMERGENCY STOP"(非常停止)は適用されてはなりません (DB10,
DBX56.1)
• 軸アラームあるいは NCK アラームがアクティブであってはなりません
個々の信号についての詳細説明は,1.10.5「信号の説明」を参照してください。
コマンドの実行
パートプログラムあるいはパートプログラムブロックが,自動的に処理され,IS
"Channel status active"(チャンネルステータスアクティブ)(DB21, ... DBX35.5) およ
び IS "Program status running"(プログラムステータス実行中)(DB21, ... DBX35.0)
がセットされます。プログラムは,プログラムの最後に到達するまで処理される
か,あるいは,STOP コマンドまたは RESET コマンドによってチャンネルを中断,
あるいは強制終了します。
アラーム
一定の条件では,START コマンドは効果がなく,次のアラームのうちの 1 つがト
リガされます。
• 10200 "No NC Start permitted with active alarm"(アラームがアクティブな場合,
NC スタートは許可されていません)
• 10202 "No NC Start permitted with active command"(コマンドがアクティブな場
合,NC スタートは許可されていません)(see /DA/)
• 10203 "No NC Start permitted for non-referenced axes"(基準化されていない軸につ
いては,NC スタートが許可されていません)
1-439
■ パートプログラムの中断
チャンネルステータス
STOP コマンドは,関連するチャンネルが "Channel active"(チャンネルアクティ
ブ)ステータス (DB21, ... D35.5) にある場合のみ実行します。
STOP コマンド
プログラムの処理を停止して,チャンネルステータスを "interrupted"(中断)に
セットする,様々なコマンドがあります。これらのコマンドは,
• IS "NC stop at block limit"(ブロックリミットでの NC 停止)(DB21, ... DBX7.2)
• IS "NC Stop"(NC 停止)(DB21, ... DBX7.3)
• IS "NC Stop axes plus spindle"(NC 停止軸プラススピンドル)(DB21, ... DBX7.4)
• IS "Single block"(単一ブロック)(DB21, ... DBX2.0)
• プログラミングコマンド "M00" あるいは "M01"
インタフェース信号の説明については,1.10.5「信号の説明」を参照してください。
パートプログラムインストラクションの説明については,次を参照してください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
コマンドの実行
STOP コマンド実行後,IS "Program status interrupted"(プログラムステータス中断)
(DB21, ... DBX35.3) がセットされます。中断されたプログラムの処理は,コマンド
START を使用して,中断点から再開できます。
STOP コマンドがトリガされると,次のアクションを実行されます。
• パートプログラムの処理を,その次のブロックリミットで停止します(ブロッ
クリミットでの NC 停止,M00/M01,あるいは単一ブロックを使用した場合)。
別の STOP コマンドを使用すると処理は直ちに停止します。
• この時点でまだ出力されていない,現在のブロックの補助ファンクションはそ
れ以上出力されません。
• 各チャンネルの軸が減速ランプに沿って減速停止し,次にパートプログラムの
処理が停止します。
• ブロックインジケータは,中断点で停止します。
1-440
中断ステータスで可能なアクション
パートプログラム中断中に(プログラムステータス停止,チャンネル中断)
,次の
アクションが実行できます。
• オーバストア
参照: YS840DI ユーザーズマニュアル・操作編
• ブロックサーチ
参照: YS840DI ユーザーズマニュアル・操作編
• 再位置決め(マシンファンクション REPOS)
参照: YS840DI ユーザーズマニュアル・操作編
• 定方向ツール後退
参照: YS840DI ユーザーズマニュアル・プログラミング編
• 割込みルーチン(1.10.2 「■非同期サブプログラム (ASUP),割込みルーチン」
を参照)
• DRF ファンクション,ワークピースゼロオフセット
参照: 2.4 JOG 運転とハンドル (H1)
• IS "NC Start"(NC スタート)(DB21, ... DBX7.1),あるいは別のチャンネルから
の NC インストラクション START を使用した,中断されたプログラムのス
タート
■ RESET コマンド
チャンネルステータス
RESET コマンドは,どのチャンネルステータスでも実行できます。このコマンド
は別のコマンドで強制終了します。
リセットコマンド
次のリセットコマンドが利用できます。
• IS "Mode group Reset"(モードグループリセット)(DB11, ... DBX0.7)
• IS "Reset"(リセット)(DB21, ... DBX7.7)
個々の信号の詳細説明については,1.10.5 「信号の説明」を参照してください。
アクティブなパートプログラムあるいはパートプログラムブロック(MDA の)を
中断するために,RESET コマンドを使用できます。
リセットコマンド実行後に,IS "Channel status reset"(チャンネルステータスリ
セット)(DB21, ... DBX35.7) がセットされます。
パートプログラムは,中断点から再開できません。チャンネルのすべての軸が,
フォローアップモードに入っていない限り,イグザクトストップになります。同
じことが,チャンネルで構成されたスピンドルにも適用されます。
1-441
RESET コマンドがトリガされると,次のアクションを実行します。
• パートプログラム準備を直ちに停止します。
• チャンネルの軸と,存在する場合はスピンドルを,減速ランプに沿って減速し
ます。
• この時点でまだ出力されていない補助ファンクションは出力されません。
• ブロックインジケータをパートプログラムの最初にリセットします。
• リセットアラーム(チャンネル別,軸別,スピンドル別)を,画面から削除し
ます。
■ プログラム制御
ユーザは,オペレータインタフェースあるいは PLC を介してパートプログラム処
理を制御できます。
選択
ソフトキー Program control(プログラム制御)のもとでは,種々のファンクション
が利用できます。選択を行うことで PLC のインタフェース信号に影響が出ます。
これらの信号は,オペレータインタフェースからの単なる選択信号であるため,
これにより選択したファンクションを起動することはありません。
起動
選択したファンクションを起動するには,これらの信号ステータスをデータブ
ロックの別のエリアに転送しなければなりません。PLC によるプログラム制御を
使用すると,信号は直接セットされます。
フィードバック信号
ファンクションが起動すると,一部のファンクションはフィードバック信号を返
します。
表 1.14 プログラム制御
ファンクション
選択信号
起動信号
SKP スキップブロック DB21, ... DBX26.0
DB21, ... DBX2.0
DRY ドライランフィー DB21, ... DBX24.6
ドレート
DB21, ... DBX0.6
ROV 早送りオーバラ
イド
DB21, ... DBX25.3
DB21, ... DBX6.6
SBL1 単一ブロック
DB21, ... DBX24.4
DB21, ... DBX0.4
M01 プログラム停止
DB21, ... DBX24.5
DB21, ... DBX0.5
DRF 選択
DB21, ... DBX24.3
DB21, ... DBX0.3
PRT プログラムテスト DB21, ... DBX25.7
DB21, ... DBX1.7
1-442
フィードバック信号
DB21, ... DBX32.6
DB21, ... DBX33.7
■ プログラムステータス
選択されたプログラムのステータスは,チャンネルごとにインタフェースに送ら
れます。その後,PLC は,インタフェースでのステータスに基づいて,製造業者
が構成した応答とインタロックをトリガできます。
プログラムステータスは,AUTOMATIC モードおよび MDA モードでしか表示さ
れません。他のすべてのモードでは,プログラムステータスを強制終了,あるい
は中断します。
プログラムステータス
次のプログラムステータスが利用できます。
• IS "Program status aborted"(プログラムステータス強制終了)(DB21, ... DBX35.4)
• IS "Program status interrupted"(プログラムステータス中断)(DB21, ... DBX35.3)
• IS "Program status stopped"(プログラムステータス停止)(DB21, ... DBX35.2)
• IS "Program status wait"(プログラムステータス待機)(DB21, ... DBX35.1)
• IS "Program status running"(プログラムステータス実行中)(DB21, ... DBX35.0)
個々の信号の詳細説明については,1.10.5「信号の説明」を参照してください。
コマンド/信号の影響
種々のコマンドあるいはインタフェース信号を起動することによって,プログラム
ステータスを修正できます。次の表では,これらの信号がセットされたときに生じ
るプログラムステータスを示しています
(信号がセットされる前のステータス -> プログラムステータス実行中)
1-443
表 1.15 プログラムステータスに対する影響
コマンド
プログラム処理ステータス
強制終了
IS "Reset"(リセット)
中断
停止
待機
実行中
X
X
IS "NC stop"(NC 停止)
IS "NC stop at block limit"
(ブロックリミットでの NC 停止)
X
IS "NC stop axes and spindles"
(NC 停止軸およびスピンドル)
X
IS "Read-in disable"
(読込みディスエーブル)
X
IS "Feed hold, channel-sp."
(フィードホールド,チャンネル別)
X
IS "Feed hold, axis-sp."
(フィードホールド,軸別)
X
X
フィードレートオーバライド = 0%
IS "Spindle stop"
(スピンドル停止)
ブロック中の M02/M30
X
X
ブロック中の M00/M01
X
IS "Single block"(単一ブロック)
X
IS "Delete distance-to-go"
(残移動距離削除)
X
X
PLC に出力されたが確認応答さ
れていない補助ファンクション
X
プログラム中の待機インストラク
ション
■ チャンネルステータス
現在のチャンネルステータスをインタフェースに送ります。その後,PLC は,イ
ンタフェースでのステータスに基づいて製造業者が構成した一定の応答とインタ
ロックをトリガできます。チャンネルステータスは,すべての動作モードで表示
されます。
チャンネルステータス
次のチャンネルステータスが利用できます。
• IS "Channel status reset"(チャンネルステータスリセット)(DB21, ... DBX35.7)
• IS "Channel status interrupted"(チャンネルステータス中断)(DB21, ... DBX35.6)
• IS "Channel status active"(チャンネルステータスアクティブ)(DB21, ... DBX35.5)
個々の信号の詳細説明については,1.10.5「信号の説明」を参照してください。
1-444
コマンド/信号の影響
様々なコマンドあるいはインタフェース信号を起動することによって,チャンネ
ルステータスを修正できます。次の表では,これらの信号がセットされたときに
生じるチャンネルステータスを示しています(信号がセットされる前のステータ
ス -> チャンネルステータスアクティブ)。
"Channel status active" (チャンネルステータスアクティブ)信号は,パートプログ
ラムあるいはパートプログラムブロック実行中に,あるいは軸を JOG モードでト
ラバースするときに得られます。
表 1.16 チャンネルステータスに対する影響
コマンド
結果のチャンネルステータス
リセット
IS "Reset"(リセット)
中断
アクティブ
X
X
IS "NC Stop"(NC 停止)
IS "NC stop at block limit"
(ブロックリミットでの NC 停止)
X
IS "NC stop axes and spindles"
(NC 停止軸およびスピンドル)
X
IS "Read-in disable"
(読込みディスエーブル)
X
IS "Feed stop, channel-sp."
(フィードホールド,チャンネル別)
X
IS "Feed hold, axis-sp."
(フィードホールド,軸別)
X
フィードレートオーバライド = 0%
IS "Spindle stop"
(スピンドル停止)
ブロック中の M02/M30
X
X
ブロック中の M00/M01
X
IS "Single block"(単一ブロック)
X
IS "Delete distance-to-go"
(残移動距離削除)
X
PLC に出力されたが確認応答さ
れていない補助ファンクション
X
プログラム中の待機インストラク
ション
X
■ オペレータアクションあるいはプログラムアクションへの応答
次の表では,一定のオペレータアクションおよびプログラムアクション後のチャ
ンネルステータスおよびプログラムステータスを示しています。
表の左側は,チャンネルステータス,プログラムステータス,および初期状態が
選択できるモードグループを示しています。様々なオペレータ/プログラムアク
ションが表の右側に示されています。アクションが実行された後の状態を表す番
号は,各アクションの後ろの丸括弧の中に示されています。
1-445
表 1.17 オペレータアクションおよびプログラムアクションへの応答
状態
チャンネル
ステータス
プログラムステータス
アクティブ
なモード
R
N
A
A
x
U
A
U
S
W
1
x
x
2
x
x
3
x
x
4
x
x
5
x
x
6
x
x
M
J
RESET (4)
x
RESET (5)
x
x
NC スタート (14); モード変更 (4 あるいは 6)
x
x
x
8
x
x
9
x
x
10
x
x
11
x
x
12
x
x
13
x
x
14
x
x
15
x
x
16
x
x
17
x
x
18
x
NC スタート (16); モード変更 (9 あるいは 11)
x
方向キー (17); モード変更 (9 あるいは 10)
x
NC スタート (13); モード変更 (10 あるいは 11)
x
NC 停止 (12)
x
NC 停止 (7); ブロックエンドで (5)
x
x
NC 停止 (8); JOG エンドで (6)
NC 停止 (10); ブロックエンドで (10)
x
x
NC スタート (15)
NC スタート (13); モード変更 (10 あるいは 11)
x
x
方向キー (15); モード変更 (4 あるいは 5)
NC スタート (14)
x
x
RESET (6)
NC スタート (13); モード変更 (5 あるいは 6)
x
7
オペレータアクションあるいはプログラム
アクション(アクション後の状態)
x
NC 停止 (11); JOG エンドで (11)
リセット (4); 他のチャンネルを待機 (18)
チャンネルステータス :
プログラムステータス :
モード :
R _ 強制終了
N _ 強制終了
A _ AUTOMATIC
U _ 中断
U _ 中断
M _ MDA
A _ 実行中
S _ 停止
J _ JOG
W _ 待機
A _ 実行中
1-446
■ パートプログラムのスタート
表 1.18 通常のプログラムシーケンス
シーケンス
コマンド
1
プログラムのロード(オペレー
タインタフェースあるいはパー
トプログラムを介した)
2
AUTOMATIC モードの選択
3
プログラムの予備選択
4
予備選択されたチャンネル用
の NC スタート
条件
(コマンドの前に満足されなけれ
ばならない)
• チャンネルが予備選択さ
れている
• 予備選択されチャンネル
がリセットステータス
• プログラム予備選択用の
ユーザ識別子が十分
• NC スタートディスエーブ
ルがセットされていない
• 基準点がすべての軸でア
プローチされている
5
6
注釈
プログラム処理
M02/M30/ リセット
なし
プログラムの終了
■ プログラムラン用のタイミング図の例
NC スタート(PLC,MMC,COM,X ユーザ言語から)
NC 停止(PLC,MMC,COM,X ユーザ言語から)
IS "NC START DISABLE"(NC スタートディスエーブル)
(DB21, ... DBX7.0)
IS "Read-in disable"(読込みディスエーブル)(DB21, ... DBX6.0)
IS "Axis controller enable"(軸コントローライネーブル)
(DB31, ... DBX2.1)
IS "Feed STOP"(フィード 停止)(DB31, ... DBX8.3)
IS "Spindle controller enable"(スピンドルコントローライネー
ブル)(DB31, ... DBX2.1)
IS "Spindle STOP"(スピンドル 停止)(DB31, ... DBX8.3)
IS "Program status running"(プログラムステータス実行中)
(DB21, ... DBX35.0)
IS "Program status interrupted" (プログラムステータス中断)
(DB21, ... DBX35.3)
IS "Program status stopped" (プログラムステータス停止)
(NCK から)(DB21, ...DBX35.2)
IS "Program status aborted"(プログラムステータス強制終了)
(NCK から)(DB21, ... DBX35.4)
IS "Traversing command X axis"(トラバースコマンド X 軸)
(NCK から)(DB31, ... DBB68)
IS "Exact stop fine"(正確停止微)(NCK から)(DB31, ... DBX60.7)
IS "Spindle stationary"(スピンドル静止)(NCK から)
(DB31, ... DBX61.4)
IS "Spindle in set range"(スピンドルがセット範囲内)
(NCK から)(DB31, ... DBX83.5)
スピンドル
ランプアップ
PLC ユーザプログラムによって論理的に組み合わされる
PLC ユーザプログラムによって補助ファンクション M170 は終了
つまり,ブロック N10 は終了(トラバース中の補助ファンクション出力)
読込みディスエーブルでプログラムは停止
RESET でプログラムは強制終了
図 1.72 プログラムラン中の信号の例
1-447
軸実行中
プログラム :
N10 G01 G90
X100
M3 S1000 F1000
M170 If N20 M0
If
.....
■ 非同期サブプログラム (ASUP),割込みルーチン
概要
割込み入力を使用すると,NC は,割込みルーチンあるいは ASUP 中のより緊急の
イベントに対応できるよう,NC 中の現在の処理オペレーションを中断することが
できます。
「ASUP」と「割込みルーチン」という用語で同一の機能性が示されます。わかり
やすいように,今後は割込みルーチンという用語だけを使用します。
• 割込みルーチンは,加工プロセスあるいは関連マシンステータスに関係する割
込みイベント(割込み入力,プロセスあるいはマシンステータス)によってス
タートする通常のパートプログラムです。中断しないようにロックされている
と特に宣言されていない限り,現在実行中のパートプログラムブロックは,こ
のルーチンによって中断されます。後の段階で,中断点でサブプログラムを再
開することができます。
• 割込みルーチンが複数存在するとき,同時に到着する入力起動信号が一定の順
番で並べられるよう,ルーチンにはそれぞれ異なる優先レベルを与える必要が
あります。
• 割込みルーチンは,PLC プログラムから,"Function call"(ファンクションコー
ル)を使用して起動できます。
(注)
ソフトウェアバージョン 3 以下では,モードグループがプログラム動作モー
ドに入っている場合にしか割込みルーチンは呼出せません。つまり,パート
プログラムブロックが,AUTOMATIC モードか MDA モードで処理されてい
る場合にしか呼出せません。SW バージョン 4 以降では,この制約は完全に
は適用されません。SW バージョン 4 で追加された,割込みルーチンの呼出
し条件については,1.10.2「■ ASUP コールアウトサイドプログラムモード
(SW バージョン 4 以降)」を参照してください。
メインプログラム/サブプログラム 割込みルーチン
ルーチンをイベントに割当て,
"ready"(レディ)に切換える
処理中の
ブロック
イベント
(スイッチの入力)
リターン可能
図 1.73 割込みルーチンを使用した作業
1-448
SETINT によるパラメータ化
割込み信号は,NC インストラクション SETINT を使用して,パートプログラムに
割当てなければなりません。これによって,パートプログラムが割込みルーチン
に切換わります。
次のパラメータが,SETINT インストラクションで使用できます。
• LIFTFAST: 割込み信号が到着すると,"Fast retraction of the tool from the contour"
(輪郭からのツールの急速後退)が,割込みルーチンがスタートする前に実行
します。後退の方向は,NC アドレス ALF によって定義されています。3 つの
ジオメトリ軸の,急速後退用のトラバースパスは,MD 21200: LIFTFAST_DIST
(輪郭からの急速後退用のトラバースパス)に保存されています。
LIFTFAST(急速後退)がパラメータ化されると,位置決めオペレーション用
の最大軸加速 (MD 32300: MAX_AX_ACCEL) が,MD 20610:
ADD_MOVE_ACCEL_RESERVE(オーバレイドモーション用の加速マージン)
にセットされた係数によって減少します。
• BLSYNC: このパラメータがセットされた場合,現在のプログラムブロックを
処理した後でしか,割込みルーチンをスタートしません。
参照: YS840DI ユーザーズマニュアル・プログラミング編
割込み信号
全部で 8 つの割込み信号が利用できます。
すべての入力は PLC を介して制御できます。
最初の 4 つの割込み信号は NCU モジュール (X121) 上の 4 つの高速 NC 入力を使用
して制御できます。
高速 NC 入力の信号ステータスは,PLC インタフェース (DB10) を介して読出すこ
とができます。高速 NC 入力信号の割込み信号への送信は,PLC インタフェース
(DB10) を介してディスエーブルできます。
4 つの急速 NC 入力
PLC インタフェース
4 つの割込み信号
4 つの割込み信号
図 1.74 割込み信号
高速 NC 入力(割込み信号)の PLC 制御に関する詳細情報については,次を参照
してください。
参照: 2.1 NCK ダイレクト入出力信号 (A4)
1-449
割込みルーチンの起動
割込みルーチンは,次の 2 つの方法で起動できます。
• 高速 NC 入力時の 0/1 遷移によってトリガされた,割込み信号の 0/1 遷移による
方法
• ファンクションコール ASUP-ST (/B1/, /P3/) による方法
起動後,すべてのマシン軸が,停止するまで加速ランプに沿って減速し (MD
32300: MAX_AX_ACCEL (軸加速)),軸位置が保存されます。
再編成
軸の減速に加えて,予めデコードされた計算ブロックが,中断ブロックにまでさ
かのぼって計算されます。つまり,すべての変数,フレーム,および G コードに
は,パートプログラムが予めデコードされることがなければ,それらが中断の時
点で持っていたはずの値が割当てられます。これらの値は,割込みルーチンが完
了したときに再び呼出すことができるように,バッファに入れられます。
再編成が不可能となる例外:
• ねじ切り中
• 複雑なジオメトリの場合(例,スプラインおよび半径補償)
割込みルーチンの実行
再編成が終了すると,自動的に「割込み」プログラムがスタートします。割込み
プログラムは,システムによって通常のサブプログラムと同様に処理されます
(オペレータインタフェースへの表示,ネスティングの深さなど)。
割込みルーチンの最後
「割込み」ルーチンのエンド識別子 (M02,M30,M17) が処理されると,軸はスタ
ンダードとして,中断ブロックの後に,パートプログラムブロックにプログラム
されたエンド位置までトラバースします。中断点へのリターン位置決めが必要な
場合は,REPOS インストラクションが,割込みルーチンの最後にプログラムされ
ていなければなりません。例,REPOSL M17
パートプロラム:
PROGNAME
N10 ...
N20 Y20
N30 X60
N40...
N50 M30
割込みルーチンの
エンド点
割込みルーチン:
INTER
N101...
N102...
N103...
N104 REPOSL M17
スタンダード (G91 の場合)
割込みルーチンの
パス
REPOSL を
使用したパス
スタンダード (G90 の場合)
中断点
図 1.75 割込みルーチンの最後
1-450
REPOS インストラクションに関する詳細情報については,次を参照してください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
SAVE コマンド
割込みルーチンを定義するために SAVE コマンドを使用した場合,中断された
パートプログラムで以前にアクティブであった G コード,フレームおよび変換は,
割込みルーチンが終了すると直ちに再びオペレーション可能となります。
割込みディスエーブル
パートプログラムセクションが割込みルーチンによって中断されるのを防ぐため
に,DISABLE コマンドをセットできます。割込み信号 <-> パートプログラムの割
当ては維持されますが,割込みルーチンは 0/1 信号遷移に応答しません。
DISABLE コマンドは,ENABLE コマンドを使用してリセットできます。割込み
ルーチンは,次に割込み信号の 0/1 遷移があるまで,起動しません。
割当てのクリア
次のことが発生すると,割込み信号 <-> パートプログラムの割当てはクリアされ
ます。
• チャンネルがリセットステータス
• CLRINT インストラクションがパートプログラム中にある
DISABLE,ENABLE,および CLRINT インストラクションに関する詳細情報(例,
シンタックス)については,次を参照してください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
■ ASUP コールアウトサイドプログラムモード(SW バージョン 4 以降)
新規 ASUP 起動ステータス
SW バーション 4 以降では,ASUP /割込みルーチンを AUTOMATIC および MDA
の両モードに加えて,次のステータスで起動できます。
• JOG,JOG REF
• MDA 教示,MDA 教示 REF,MDA 教示 JOG,MDA REF,MDA JOG
• AUTOMATIC,停止,レディ
• 基準化されていない
割込みルーチンが JOG モードあるいは REF モードで起動した場合,進行中の寸動
および基準化オペレーションは中断します。
1-451
スタート条件
MD 11602: ASUP_START_MASK をセットすることにより,ASUP が初期設定で
ロックされてしまうような条件についても ASUP をイネーブルできます。
• 停止キー,M0,M01 による停止
• 軸がまだすべて基準化されていない
• 読込みディスエーブルがアクティブ
初期設定が有効なままである場合,その応答は SW バージョン 3 用の応答と同じ
です。
明示的 ASUP スタート
ASUP が自動的にスタートしないように,MD 11602: ASUP_START_MASK がセッ
トされている場合でも,この ASUP をスタートキーによって起動できます。パラ
メータ化してもよい急速後退が常にスタートします。
優先順位
MD 11602: ASUP_START_MASK の設定が有効となる最高の優先レベルを定義する
ために MD 11604: ASUP_START_PRIO_LEVEL をセットできます(1 ~ 128,1 は
最高の優先レベル)
。この MD で指定された優先順位は,1 からここで指定された
レベルまでのすべてをカバーします。
VDI 信号がモードグループチャンネルに及ぼす影響
モードグループ信号(モードグループリセット,モードグループ停止軸およびスピ
ンドル,モードグループ切換えディスエーブル)が,割込みルーチンが現在処理さ
れているモードグループチャンネルに与える影響を制御するために,MD11600:
BAG_MASK をセットできます。1.10.7「■一般マシンデータ」を参照してくださ
い。
このマシンデータはまた内部プログラム処理モードが,割込みルーチンが起動し
ている 1 つのチャンネルにしか適用されないのか,あるいはモードグループ中の
すべてのチャンネルに適用されるのかを定義します。
1-452
NC 応答
次の表では,オペレーションステータス別の NC 応答について説明しています。
表 1.19
NC のステータス
ASUP のスタート
制御システムのリアクション
プログラムがアク
ティブ
Interrupt,(PLC)
急速後退あるいは停止軸
ASUP 中はプログラムの中断
ASUP に REPOS が含まれている場合,中断点へのア
プローチ
パートプログラムの再開(SW バージョン 3 以降に対応)
RESET
Interrupt,(PLC)
ASUP は,メインプログラムと同じように実行す
る。RESET (M30 を使用しない)は ASUP の終了
時に実行する。その次の制御システムステータス
はマシンデータ
MD 20110: RESET_MODE_MASK および
MD 20112: START_MODE_MASK によって決まる。
参照:1.11 軸構成及び座標系 (K2)
プログラムモード
AUTOMATIC あるい
は MDA およびチャ
ンネル停止
Interrupt,(PLC)
ASUP が実行する。チャンネルは,ルーチン終了
時に "stopped"(停止)ステータスを再開する。 ASUP 中に REPOS:
ASUP の処理はアプローチブロックの前で終
了する。アプローチ動作は,スタートキーで
開始できる。
Start key
ASUP 実行後,中断されたプログラムの処理が再
開する。
(SW バージョン 3 と同様)
手動モード,チャン
ネル停止
Interrupt,(PLC)
制御システムは,指定されたチャンネルについて
ステータス "internal program processing mode"(内
部プログラム処理モード)となり(外部的に明白
ではない)
,その後,ASUP を起動する。選択さ
れた動作モードは有効なままである。元のステー
タスは ASUP の実行後に再開する(M17)。
JOG
AUTO 教示 ,
AUTO 基準点の教示
Interrupt,(PLC)
MDA JOG、
MDA 教示,
MDA 基準点教示
Interrupt,(PLC)
処理を停止し,MD11602: ASUP_START_MASK
および MD 11604: ASUP_START_PRIO_LEVEL 中
の設定を評価し,必要に応じて,"internal
program execution mode"(内部プログラム実行
モード)に内部的に切換え,ASUP を起動し,
ASUP スタート前のステータスをリストアする。
SETINT を使用して定義された LIFTFAST は,
JOG モードでは起動しない。
手動モード,
チャンネル実行中
Interrupt,(PLC)
INITIAL.INI の処理, ASUP はスタート
ブロックサーチ,NC できない
スタートでリセット
できないアラーム,
デジタル化が起動,
チャンネルがエラー
ステータス
1-453
現在アクティブなモーションが停止する。移動距
離は削除される。オペレーションの残りのシーケ
ンスは,"Manual mode, channel stopped"(手動
モード,チャンネル停止)の場合と同じである。
信号 "Interrupt request not possible"(割込み要求不
可能)が生成される。1.10.5「信号の説明」を参
照。
起動オプション
SW バージョン 4 以降では,割込み入力をショートサーキットにより間接的にイ
ネーブルする出力をセットするために,同期化アクションを使用して ASUP を起
動することもできます。
例:
1. アクティブなデジタル I/O の数を定義する
FASTIO_DIG_NUM_INPUTS=3
FASTIO_DIG_NUM_OUTPUTS=3
2. 次の MD を使用して,ショートサーキットを生成する
FASTIO_DIG_SHORT_CIRCUIT[0]=’H0102B102’
FASTIO_DIG_SHORT_CIRCUIT[1]=’H0202B202’
3. NC プログラム割込み用に外部 NC 入力バイトのハードウェア割当て
SETINT_ASSIGN_FASTIN=2 ; 必要なバイト数より 1 バイト多く使用する
方がよい
4. SETINT (1) PRIO=1 SYNCASUP; 入力を ASUP トリガと定義する
5. IDS=1 EVERY $$AC_PATHN>=0.5 DO $A_OUT_[9]=1
参照: /FBSY/, Synchronized Actions
REPOS
SW バージョン 3 では,MDA あるいは AUTOMATIC からしか呼出すことのできな
かった ASUP の場合,中断点を再位置決めするために,ASUP 終了時に REPOS を
呼出すことができました。SW バージョン 4 で提供されている新しいオプションを
使用すると,ブロック処理シーケンス中の中断点に明確に戻ることのない ASUP
シーケンスが生成されることがあります。
システム変数:
$P_REPINF
は,REPOS が可能かどうか判別する際に,ASUP をスキャンするのに使用できます。
値
意味
0
REPOS を使用した再位置決めは不可能。なぜなら,
- ASUP 中に呼出されていない
- ASUP は RESET ステータスから実行した
- ASUP は JOG ステータスから実行した
1
ASUP で REPOS を使用した再位置決めが可能
読込みディスエーブル
MD 20116: IGNORE_INHIBIT_ASUP の設定は,読込みディスエーブルがアクティ
ブであっても,指定された割込みチャンネルについてのユーザ ASUP を完全に実
行しなければならない,と制御装置に命令します。
1-454
単一ブロック処理
MD 20117: IGNORE_SINGLEBLOCK_ASUP の設定は,単一ブロック処理モードが
選択されていても,指定された割込みチャンネルについてのユーザ ASUP を完全
に実行しなければならない,と制御装置に命令します。
■ ユーザ定義システム ASUP (SW バージョン 4 以降)
予備条件
NCK が提供されている SW には,RET および REPOS ファンクションを実行する
ための予備プログラムされた処理(内部 ASUP)が含まれています。SW バージョ
ン 4 以降では,マシン製造業者がこれらの標準ルーチンを自身のルーチンと置換
えることができます。
システムルーチンの置換え
MD 11610: ASUP_EDITABLE は,どのシステムルーチンをユーザ定義ルーチンと
置換えるべきか判別するためにセットされます。
値
意味
0
ディレクトリ _N_CUS_DIR の _N_ASUP_SPF に保存されているユーザ定
義ルーチンは,RET についても REPOS についても起動しない。応答は,
SW バージョン 3 の場合と同様。
1
ユーザ定義ルーチンは RET について起動する。システムに提供されてい
るルーチンは,REPOS について起動する。
2
ユーザ定義ルーチンは REPOS について起動する。システムに提供され
ているルーチンは RET について起動する。
次の図では,どのルーチンが使用されるかを説明しています。
NCK システム SW
ユーザ SW
システム
ASUP
RET
システム
ASUP
REPOS
システム
ASUP
REPOS
ユーザ
RET
ユーザ
REPOS
システム
ASUP
RET
MD 11610 に保存されている値
図 1.76 ユーザ定義ルーチンとシステム ASUP の置換え
1-455
ユーザシステム ASUP のインストレーション
_N_ASUP_SPF という名前の付いた 1 つのルーチンを,ディレクトリ _N_CUS_DIR
にロードすることができます。
このルーチンは,MD 11610 が 1 にセットされているときは,RET について,MD
11610 が 2 にセットされているときは,REPOS について,ユーザが要求するアク
ションを実行しなければなりません。
$AC_ASUP
ビット
19 18 17 16 15 14 13 12 11 10
RET
REPOS
1
1
1
1
1
1
1
1
1
1
9
8
*
*
7
6
5
1
1
4
3
2
1
0
1
1
*) ビット 9 がセットされている場合,そのブランチは MD 20114 によって
決定します。
MODESWITCH_MASK:
MD 20114 でビット 0 がセットされいる:RET
MD 20114 でビット 0 がセットされていない:REPOS
1-456
ビットの意味
システム変数 $AC_ASUP のビットの意味は次のとおりです。
ビット
意味
0
ユーザ割込み「Blsync を使用した ASUP」再開:REORG あるいは RET を自由に選
択可能
1
ユーザ割込み "ASUP";ルーチンが停止した位置が,REPOS を使用して再開するた
めに保存される 再開:REORG あるいは RET を自由に選択可能
2
ユーザ割込み「チャンネルステータスレディからの ASUP」再開:REORG あるい
は RET を自由に選択可能
3
ユーザ割込み「手動モードでチャンネルステータスノットレディの ASUP」再開:
REORG あるいは RET を自由に選択可能
4
ユーザ割込み "ASUP";(割込みが発生したときの現在位置が,REPOS を使用して
再開するために保存される)再開:REORG あるいは RET を自由に選択可能
5
サブプログラムの繰返しの強制終了 再開:システム ASUP REPOS を使用
6
デコーダ単一ブロックの起動 再開:システム ASUP REPOS を使用
7
移動距離削除の起動 再開:システム ASUP RET を使用
8
軸同期の起動 再開:システム ASUP REPOS を使用
9
動作モードの切換え 再開:MD 11610 に基づいて,システム ASUP REPOS あるいは
RET を使用
10
教示中あるいは教示停止後のプログラム再開 再開:システム ASUP RET を使用
11
オーバストア選択 再開:システム ASUP REPOS を使用
12
REPOS リアクション補正ブロックでアラーム 再開:システム ASUP REPOS を使用
13
G33 を使用した後退モーションおよび停止 再開:システム ASUP RET を使用
14
ドライランフィードレートの起動 再開:システム ASUP REPOS を使用
15
ドライランフィードレートの停止 再開:システム ASUP REPOS を使用
16
スキップブロックの起動 再開:システム ASUP REPOS を使用
17
スキップブロックの停止 再開:システム ASUP REPOS を使用
18
マシンデータの起動 再開:システム ASUP REPOS を使用
19
ユーザデータの起動 再開:システム ASUP REPOS を使用
ユーザルーチン用の保護レベル
ユーザ定義ルーチンを使用する場合,つまり,MD 11610: ASUP_EDITABLE に 0 以
外の値がプログラムされている場合,ユーザ別ルーチン _N_ASUP_SPF について
保護レベルを定義できます。この保護レベルは,0 ~ 7 の値にセットでき,MD
11612: ASUP_EDIT_PROTECTION_LEVEL に入力しなければなりません。保護レ
ベルに関する詳細説明については,次を参照してください。
参照: /IAD/, Installation and Start-Up Guide, System of
Protection Levels
1-457
単一ブロック処理
マシンデータ 10702: IGNORE_SINGLEBLOCK_MASK 中のビット 0 は,単一ブ
ロック処理を選択している場合でも,内部 ASUP あるいはユーザ定義 ASUP をブ
ロックごとに中断せずに処理しなければならないかどうかを決定します。
ビット 0 がセットされている:
内部 ASUP をブロックごとに中断しない。
ビット 0 がセットされていない:
内部 ASUP をブロックごとに中断する。
危険
マシン製造業者は,Siemens が提供する ASUP.SYF と置換えて使用する
ASUP ルーチンの内容について責任があります。
■ 外部サブプログラムの実行(SW バージョン 4 以降)
(注)
このファンクションは MMC 102/103 にのみ適用されます。
EXTCALL
EXTCALL <Path, optional>(パス,オプション)<Program name>(プログラム名)
複雑なワークピースを生産する個々の加工ステップには,メモリを大量に必要と
するために NC メモリ中には保存できない,プログラムシーケンスが必要となるこ
とがあります。
プログラムコマンド EXTCALL は,"Process from external memory"(外部メモリか
らのプロセス)モードで,MC 102/103 のハードディスクからプログラムをロード
する際に使用できます。
原則として,MMC 102/103 のディレクトリストラクチャを介してアクセスできる
プログラムはすべてロード,実行できます。
SD 42700
EXT_PROG_PATH
コールパスは,SD 42700 で柔軟に定義できます。SD 42700 にはパス名が含まれて
いて,このパス名は,プログラムされたサブプログラム識別子と共に,呼出され
るプログラムの絶対パス名を表します。
絶対パス名を使用せずに外部サブプログラムを呼出すと,MMC は,サブプログラ
ムがメインメモリから呼出された場合に適用されるのと同じサーチパスを調べます。
セット可能な再ロードメモリ
"Process from external memory"(外部メモリからのプロセス)モードで,プログラ
ムを実行する際に,再ロードメモリ(FIFO バッファ)が必要となります(メイン
/サブプログラム)
。
再ロードメモリのデフォルトは 30 KB です。
バッファのサイズは,MD 18360 EXT_PROG_BUFFER_SIZE でセットされます。
1-458
RESET / POWER ON
外部サブプログラムコールは,RESET あるいは POWER ON で強制終了し,それ
ぞれの FIFO バッファを消去します。
(注)
外部サブプログラムには,GOTOF,GOTOB,CASE,IF-ELSE,FOR,
LOOP,WHILE,あるいは REPEAT などのブランチインストラクションが含
まれてはなりません。
サブプログラムコールは可能です。
例:
$SC_EXT_PROG_PATH = "_N_WKS_DIR/_N_WST1"
メインプログラム _N_MAIN_MPF (メインメモリに保存されていて,処理
のために選択される):
N010 PROC MAIN
N020 ....
N030 EXTCALL "ROUGHING"
:外部サブプログラムの呼出し
ROUGHING_SPF
N040 .....
N050 M30
サブプログラム _N_SCHRUPPEN_SPF
(ワークピース ->WST1 より下位の MMC
のディレクトリストラクチャに保存され
ている)
N010 PROC ROUGHING
N020 G1 F1000
N030 X= ... Y= ... Z= ...
N040 .....
....
....
N90 M17
■ プログラムセクションの繰返し(SW バージョン 4 以降)
基本情報
すでにプログラムされたプログラムセクションが再び必要になることがよくあり
ます。
サブプログラムを使用する代わりに,現行のプログラムセクションを任意の順番
で繰返すことができます。
ブロックをコピーする場合と比較したときの利点は,メモリを節約でき,簡単に
修正ができるということです。位置の変更は一点で行えます。
1-459
ラベル
ブロックあるいはプログラムセクションを識別する際に,ラベルをプログラム内
で使用します。
参照: YS840DI ユーザーズマニュアル・プログラミング編
繰返し
プログラムの一部を繰返す際に利用できるオプションは次のとおりです。
• ブロックの繰返し
• ラベルでスタートするエリアの繰返し
• 2 つのラベルの間にあるエリアの繰返し
• ラベルとエンドラベルの間にあるエリアの繰返し
参照: YS840DI ユーザーズマニュアル・プログラミング編
起動
インストラクションをプログラムすることによって,プログラムセクションの繰
返しが起動します。
例
フライス加工:種々のテクノロジを使用したマシン穴あけ位置
N10 ZENTRIERBOHRER()
; 中央ドリルのロード
N20 POS_1:
; 穴あけ位置 1
N30 X1 Y1
N40 X2
N50 Y2
N60 X3 Y3
N70 ENDLABEL:
N80 POS_2:
; 穴あけ位置 2
N90 X10 Y5
N100 X9 Y-5
N110 X3 Y3
N120 ENDLABEL:
N130 BOHRER()
; ドリルおよび穴あけサイクルの変更
N140 GEWINDE(6)
; タップ M6 およびスレッディングサイクルのロード
N150 REPEAT POS_1
; プログラムセクションを位置 1 から 1 回繰返す
;エンドラベルまで
N160 BOHRER()
; ドリルおよび穴あけサイクルのロード
N170 GEWINDE(8)
; タップ M6 およびスレッディングサイクルのロード
N180 REPEAT POS_2
; プログラムセクションを位置 2 から 1 回繰返す
;エンドラベルまで
N190 M30
1-460
■ 複数のスキップレベル(SW 5 以降)
プログラムランのたびに実行しなくてもよいブロックをスキップすることが可能
です。スキップされるブロックは,ブロック番号の前の斜線 "/" によってパートプ
ログラム中に表示されます。
パートプログラム中のスキップレベルは,"/0" ~ "/7" で示されます。1 つのパート
プログラムブロック中には 1 つのスキップレベルしか示すことができません。
MD 9423 MAX_SKP_LEVEL は,スキップレベルの数を定義しています。
例:
プログラムランのたびに実行しなくてもよいブロックは,次のようにスキッ
プできます(例,プログラムランニングインブロック)。
/
; スキップされるブロック, 第 1 スキップレベル
/ N005
; スキップされるブロック, 第 1
"
/0 N005
; スキップされるブロック, 第 1
"
/1 N010
; スキップされるブロック, 第 2
"
/2 N020
; スキップされるブロック, 第 3
"
/3 N030
; スキップされるブロック, 第 4
"
/4 N040
; スキップされるブロック, 第 5
"
/5 N050
; スキップされるブロック, 第 6
"
/6 N060
; スキップされるブロック, 第 7
"
/7 N070
; スキップされるブロック, 第 8 スキップレベル
スキップレベルは,マシンオペレーティングエリアにある "Program modification"
(プログラム変更)メニューを介して,MMC 上で起動します。次を参照してくだ
さい。
参照: YS840DI ユーザーズマニュアル・操作編
(注)
制御装置が停止/リセットステータスにあるときにしか,スキップされる
レベルは変更できません。
1-461
■ 単一ブロック
単一ブロックファンクションを使用すると,ユーザはパートプログラムを 1 ブ
ロックずつ処理できます。単一ブロックファンクション用の設定には 2 タイプあ
ります。
• SLB1 := IPO 単一ブロック
SLB1 ファンクションをアクティブにすると,マシンアクションブロック(Ipo
ブロック)ごとに,加工が停止あるいは一時停止します。
• SLB2 := デコード単一ブロック
SLB2 ファンクションをアクティブにすると,パートプログラムブロックごと
に,加工が常に停止あるいは一時停止します。パートプログラムブロックが,
複数の IPO ブロックで処理される場合,加工は,Ipo ブロックごとに停止しま
す。ねじ切り中は例外です。
SW バージョン 4 以降
1. 多くの状況および一定のブロックでは,加工が停止することは望ましくありま
せん。
例 1:
再編成あるいは再位置決めが不可能な場合の,JOG 後の変更,MD 10702,
ビット 6 および 7。
再編成あるいは再位置決めができないブロック中のブロックの最後で加工
が停止する場合,JOG モードは選択できません。
例 2:
STOPRE ブロック上での JOG 後の変更,MD 10702,ビット 6 および 7
STOPRE ブロックがアクティブなときに,JOG モードから Auto モードに変
更すると,systemasup2 ブロックとさらに 2 つの STOPRE ブロックに加え
て,残りのブロックと 1 つあるいは 2 つのデコーディングブロックが現れ
ます。単一ブロック中でパートプログラムスタートを常にトリガし,その
後,必ず JOG モードに切換わる論理オペレーションは,STOPRE ブロック
に永久に留まります。
例 3:
DISPOF: ブロック表示の停止,MD 10702,ビット 6 および 7
DISPOF がサブプログラムにプログラムされている場合,ブロック表示は抑
止されます。オペレータは,サブプログラムの最後まで,単一ブロックで
スタートを何回も押さなければなりません。
2. 単一ブロックを停止すると,ブロックの最後で停止しなくなります。
3. STOPRE ブロックが表示されると,メインランおよび予備処理がデコーディン
グ単一ブロックで同期化されます。
1-462
■ SBLOF を使用した単一ブロックの抑止(SW バージョン 4.2 以降)
SBLOF
言語コマンド SBLOF で識別されたプログラムを,すべてのタイプの単一ブロック
と同様に,1 つのブロックの中で完全に実行します。
SBLOF は,呼出されたサブプログラムでも有効です。
例:
PROC BEISPIEL SBLOF
G1 X10
RET
プログラム中
SBLOF は,ブロック中に自身のブロックで現れることができます。このブロック
の影響で,単一ブロックが,その次にプログラムされた SBLON が現れるまで,あ
るいはアクティブなサブプログラムレベルの最後まで,停止します。
SBLOF がアクティブな場合,SBLOF は呼出されたサブプログラムにも適用します。
例:
N20 と N60 の間のエリアを,単一ブロックモードで,1 ステップとして実行
します。
N10 G1 X100 F1000
N20 SBLOF
; 単一ブロックの停止
N30 Y20
N40 M100
N50 R10=90
N60 SBLON
; 単一ブロックの再起動
N70 M110
N80 ...
非同期サブプログラム
非同期サブプログラム,ASUP1.SYF および ASUP2.SYF は,Reorg/Repos 時にシス
テムで内部的にスタートしますが,SW 4 までのソフトウェアバージョンでは,1
ステップずつ処理する必要があります。SW 4 以降のソフトウェアバージョンで
は,SBLOF をプログラムすることによって,システム ASUP は 1 ステップで実行
できます。
例:
ASUP.SPF:
N10 SBLOF
N20 IF $AC_ASUP == ’H200’
N30 RET
; モード変更時に Repos しない
N40 ELSE
N50 REPOSA
; 他のすべての場合は Repos
N60 ENDIF
N70 RET
1-463
一般条件
• DISPLOF を使用して,サイクルで,現在のブロック表示を抑止できます。
• DISPLOF が SBLOF と合わせてプログラムされている場合,サイクルコールは,
サイクル内で単一ブロックが停止するたびに表示され続けます。
• 単一ブロックを使用した,非同期プログラムの応答用の初期設定は,MD
20117: IGNORE_SINGLEBLOCK_ASUP に定義されていて,SBLOF を使用して
特定のプログラムに上書きできます。
例
例 1:
サイクルはあたかもパートプログラマが発行するコマンドのような働きをし
ます。
メインプログラム:
N10 G1 X10 G90 F200
N20 X-4 Y6
N30 CYCLE1
N40 G1 X0
N50 M30
プログラムサイクル:1
N100 PROC CYCLE1 DISPLOF SBLOF ; 単一ブロックの抑止
N110 R10=3*SIN(R20)+5
N120 IF (R11 <= 0)
N130 SETAL(61000)
N140 ENDIF
N150 G1 G91 Z=R10 F=R11
N160 RET
単一ブロックがアクティブなときは,サイクル CYCLE1 を 1 ステップで実行
します。
例 2:
変更されたゼロオフセットとツールオフセットを起動するために PLC によっ
てスタートした ASUP を表示することなく実行します。
N100 PROC NV SBLOF DISPLOF
N110 CASE $P_UIFRNUM OF 0 GOTOF _G500 1 GOTOF _G54 2 GOTOF _G55 3
-->GOTOF _G56 4 GOTOF _G57 DEFAULT GOTOF END
N120 _G54: G54 D=$P_TOOL T=$P_TOOLNO
N130 RET
N140 _G54: G55 D=$P_TOOL T=$P_TOOLNO
N150 RET
N160 _G56: G56 D=$P_TOOL T=$P_TOOLNO
N170 RET
N180 _G57: G57 D=$P_TOOL T=$P_TOOLNO
N190 RET
N200 END: D=$P_TOOL T=$P_TOOLNO
N210 RET
1-464
■ MD を使用した単一ブロックの抑止(SW バージョン 4.2 以降)
次のことを実行している間,MD 10702 IGNORE_SINGLEBLOCK_MASK を使用す
ると,ブロックの最後で停止しないようにすることが可能です。
MD 10702
値=1
SBL 処理を選択している場合でも,次の場合には,プログラム処理を 1 ブロック
ごとに停止してはなりません。
1. 内部 ASUP
2. ユーザ Asup
3. 属性 DISPLOF を使用したサブプログラム
4. 中間ブロック
5. ブロックサーチグループブロック
6. 初期ブロック
7. 再編成できないブロック
8. 再位置決めできないブロック
9. トラバース情報を持たない再アプローチブロック
たとえば,単一ブロック中に,ASUP を起動した場合,ASUP の実行は完了しま
す。その ASUP が終了するまで,あるいは,単一ブロックの抑止が起動していな
い最初の Ipo ブロックが現れるまで,減速動作は起こりません。速度が速すぎてこ
のブロックで減速が実行できない場合は(連続パスモード G64 がアクティブな場
合),さらにブロック変更をイネーブルしなければなりません。
デコーディング単一ブロックの場合,MD 10702 は,
「内部 ASUP」,
「ユーザ
ASUP」および 「属性 DISPLOF を使用したサブプログラム」の場合でしか有効に
なりません。この場合は,ブロックが上記のカテゴリのうちの 1 つに属するとい
うことが解釈時にはすでに明白です。この場合には,ブロックがさらに生成でき
ます。
次の制約がデコーディング単一ブロックに適用されます。
• ブロックサーチアプローチブロック
• ASUP; DISPLOF,SBLOF 中にないブロック
• 再編成できないブロック
• 再位置決めできないブロック
• インタプリタで生成されないブロック(例,中間ブロック)。
1-465
1.10.3 補足条件
チャンネルおよびモードグループの数
チャンネルおよびモードグループの数については,次を参照してください。
参照: /BU/, "Ordering Catalog, Catalog NC 60.1"
非同期サブプログラム (ASUP),割込みルーチン
割込みルーチン/ ASUP ファンクションはオプションであり,SW バージョン 4 以
降で利用できます。
複数のプログラムレベルのスキップ
SW 5 以降では,8 プログラムレベルまでスキップできます。
1.10.4 データの説明 (MD,SD)
■ 一般マシンデータ
9423
MD 番号
MAX_SKP_LEVEL
スキップできるプログラムレベル数の定義
最小入力リミット : 1
初期設定 : 1
最大入力リミット : 8
保護レベル : 2
変更が有効になるための条件:即有効
単位 : 適用開始 SW バージョン : 5.1
データタイプ : BYTE
意味 :
この MD は,パートプログラムでスキップできるプログラムレベルの数を "/" を
使用して定義する。パートプログラムに追加されたスキップレベルは,"/0" ~ "/
7" で指定される。
"program section” 操作パネルウィンドウ中の(サブ ) プログラムは、この MD で
指定されたレベルまでしか表示されない。
アプリケーション例
/ N005
/3 N030
/7 N070
例外,エラー
モードグループが 1 つしか存在しない場合でも,この MD は入力しなければなら
ない。
; MD9423=1 以上の場合,ブロックはスキップされる
; MD9423=4 以上の場合,ブロックはスキップされる
; MD9423=8 以上の場合,ブロックはスキップされる。
1-466
9600
MD 番号
$MM_CTM_SIMULATION_DEF_X
シミュレーション初期値 X
初期設定 : 0
最小入力リミット : -10000
保護レベル : 1
変更が有効になるための条件:即有効
データタイプ :LONG
意味 :
最大入力リミット : 10000
単位 : mm
適用開始 SW バージョン :
SW 4.3
この MD は表示エリアの X 座標のサイズを定義する。シミュレーションで
“元に戻す”ソフトキーを押すと,ここで指定された初期値を起動する。
例外,エラー
-
関連性
MD 9601: $MM_CTM_SIMULATION_DEF_Z
MD 9602: $MM_CTM_SIMULATION_DEF_VIS_AREA
9601
MD 番号
$MM_CTM_SIMULATION_DEF_Z
シミュレーション初期値 Z
最小入力リミット : -10000
初期設定 : 0
保護レベル : 1
変更が有効になるための条件:即有効
データタイプ : LONG
意味 :
最大入力リミット : 10000
単位 : mm
適用開始 SW バージョン :
SW 4.3
この MD は表示エリアの Z 座標のサイズを定義する。シミュレーションで
“元に戻す”ソフトキーを押すと,ここで指定された初期値を起動する。
例外,エラー
-
関連性
MD 9600: $MM_CTM_SIMULATION_DEF_X
MD 9602: $MM_CTM_SIMULATION_DEF_VIS_AREA
9602
MD 番号
$MM_CTM_SIMULATION_DEF_VIS_AREA
表示エリア用のシミュレーション初期値
初期設定 : 100
最小入力リミット : -10000
変更が有効になるための条件:即有効
保護レベル : 1
最大入力リミット : 10000
単位 : mm
適用開始 SW バージョン :
SW 4.3
データタイプ :LONG
意味 :
この MD は,X 座標を使用して,表示エリアのサイズを定義する。Z 座標は
この値から自動的に計算される。
例外,エラー
-
関連性
MD 9600: $MM_CTM_SIMULATION_DEF_X
MD 9601: $MM_CTM_SIMULATION_DEF_Z
1-467
9603
MD 番号
$MM_CTM_SIMULATION_MAX_X
シミュレーション最大表示 X
最小入力リミット : -10000
初期設定 : 0
最大入力リミット : 10000
保護レベル : 1
変更が有効になるための条件:即有効
単位 : mm
適用開始 SW バージョン :
SW 4.3
データタイプ : LONG
意味:
この MD は第 2 表示エリア(例,大きなワークピース用)の X 座標のサイ
ズを定義する。
シミュレーションで MAX ソフトキーを押すと,ここで指定された初期値を
起動する。
例外,エラー
-
関連性
MD 9604: $MM_CTM_SIMULATION_MAX_Z
MD 9605: $MM_CTM_SIMULATION_MAX_VIS_AREA
9604
MD 番号
$MM_CTM_SIMULATION_MAX_Z
シミュレーション最大表示 Z
最小入力リミット : -10000
初期設定 : 0
最大入力リミット : 10000
保護レベル : 1
変更が有効になるための条件:即有効
単位 : mm
適用開始 SW バージョン :
SW 4.3
データタイプ : LONG
意味:
この MD は第 2 表示エリアの Z 座標のサイズを定義する。
シミュレーションで MAX ソフトキーを押すと,ここで指定された初期値を
起動する。
例外,エラー
-
関連性
MD 9603: $MM_CTM_SIMULATION_MAX_X MD 9605:
$MM_CTM_SIMULATION_MAX_VIS_AREA
9605
MD 番号
$MM_CTM_SIMULATION_MAX_VIS_AREA
シミュレーション最大表示エリア
最小入力リミット : -10000
初期設定 : 1000
変更が有効になるための条件:即有効
保護レベル : 1
最大入力リミット : 10000
単位 : mm
適用開始 SW バージョン :
SW 4.3
データタイプ : LONG
意味:
この MD は X 座標を使用して,第 2 表示エリアのサイズを定義する。
Z 座標はこの値から自動的に計算される。
例外,エラー
-
関連性
MD 9603: $MM_CTM_SIMULATION_MAX_X
MD 9604: $MM_CTM_SIMULATION_MAX_Z
1-468
9606
MD 番号
$MM_CTM_SIMULATION_TIME_NEW_POS
描画ポジションサンプリングタイム
初期設定 : 100
最小入力リミット : 0
最大入力リミット : 4000
保護レベル : 1
変更が有効になるための条件:即有効
データタイプ : WORD
適用開始 SW バージョン :
SW 4.3
この MD は,シミュレーション描画が機械からの最新ポジションデータで
リフレッシュされる時間の間隔を定義する。
値 = 0 は更新されていないということを意味する。
意味:
9610
MD 番号
$MM_CTM_POS_COORDINATE_SYSTEM
座標系の位置
初期設定 : 2
最小入力リミット : 0
変更が有効になるための条件:即有効
最大入力リミット : 7
保護レベル : 6/7
単位 : -
データタイプ : BYTE
意味:
単位 : ms
適用開始 SW バージョン :
SW 4.3
座標系の位置は次のように変更できる。
0
1
2
3
4
5
6
7
注記:
ManualTurn ユーザインタフェースでは,回転方向の付いたすべてのヘルプ画
面,プロセスグラフィックス,および入力フィールドが,選択された位置に
応じて自動的に変化する。
例外,エラー
-
関連性
-
1-469
9611
MD 番号
$MM_CTM_CROSS_AX_DIAMETER_ON
対向軸について有効な直径表示
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
保護レベル : 4/7
変更が有効になるための条件:即有効
データタイプ : BYTE
意味:
単位 : -
適用開始 SW バージョン :
SW 4.3
= 0:
・絶対値の代わりに半径値として入力
・ゼロオフセットは常に半径表示
・ツール長は常に半径表示
・ツール摩耗は常に半径表示
= 1:
・位置表示は直径表示
・移動距離は直径表示
・絶対距離は直径表示
9619
MD 番号
$MM_CTM_G91_DIAMETER_ON
相対インフィード
初期設定 : 0
最小入力リミット : 0
変更が有効になるための条件:即有効
最大入力リミット : 1
保護レベル : 4/7
データタイプ : BYTE
適用開始 SW バージョン :
SW 4.3
意味:
0 = 半径で入力
1 = 直径で入力
例外,エラー
-
関連性
-
10010
MD 番号
初期設定 : 1/0
単位 : -
ASSIGN_CHAN_TO_MODE_GROUP[n]
モードグループで有効なチャンネル
最小入力リミット : 0
変更が有効になるための条件 : 電源オン
最大入力リミット : 1
保護レベル : 2
単位 : -
適用開始 SW バージョン : 1.1
データタイプ : BYTE
意味:
チャンネルは,この MD を使用してモードグループに割当てられる。
入力値 1 => 第 1 モードグループに割当て
入力値 2 => 第 2 モードグループに割当て
など
アプリケーション例
MMC を介して希望するチャンネルを選択し,次のようにセットする
ASSIGN_CHAN_TO_MODE_GROUP = 1.
例外,エラー
モードグループが 1 つしか存在しない場合でも,この MD は入力しなければ
ならない。
1-470
10702
MD 番号
IGNORE_SINGLEBLOCK_MASK
シングルブロック後に停止しない
初期設定 : 0
最小入力リミット : 0
変更が有効になるための条件 : 電源オン
保護レベル : 2 / 7
次の場合には,SBL 処理を選択していても,シングルブロックごとに
プログラム処理を停止してはならない。
ビット 0
ビット 1
ビット 2
ビット 3
ビット 4
ビット 5
ビット 6
ビット 7
ビット 8
ビット 9
関連性
単位 : -
適用開始 SW バージョン : 4.2
データタイプ : DWORD
意味 :
最大入力リミット :
0xFFFF
内部 ASUP:RETURN,REPOS
ユーザ ASUP( 次の MD と関連する場合のみ。
MD 20117: IGNORE_SINGLEBLOCK_ASUP)
中間ブロック
ブロックサーチグループブロック
初期ブロック
DISPLOF を使用したサブプログラム
再編成できないブロック
再位置決めできないブロック
移動情報を持たない残りのブロック
中断のために繰返される同期化ブロック
IGNORE_SINGLEBLOCK_ASUP
1-471
10710
MD 番号
PROG_SD_RESET_SAVE_TAB[n]
更新される設定データ _ Index _ : 0...9
この表に示されている SD の値は,不揮発性メモリに保存される。つまり,電源オン
後も有効のままである。MMC 番号をバックアップリストに入力した設定データは,リ
セット時に,パートプログラムの後で,(バッファされた)有効なファイルシステムに
書込まれる。
初期設定 : 0
最小入力リミット : 0
最大入力リミット : ***
保護レベル : 2
変更が有効になるための条件 : 電源オン
データタイプ : DWORD
単位 : 適用開始 SW バージョン : 1.1
プログラム可能な設定データは次のとおり。
42000 $SC_THREAD_START_ANGLE
42800 $SC_SPIND_ASSIGN_TAB
43210 $SA_SPIND_MIN_VELO_G25
43220 $SA_SPIND_MAX_VELO_G26
43230 $SA_SPIND_MAX_VELO_LIMS
43420 $SA_WORKAREA_LIMIT_PLUS
43430 $SA_WORKAREA_LIMIT_MINUS
43510 $SA_FIXED_STOP_TORQUE
43520 $SA_FIXED_STOP_WINDOW
43700 $SA_OSCILL_REVERSE_POS1
43710 $SA_OSCILL_REVERSE_POS2
43720 $SA_OSCILL_DWELL_TIME1
43730 $SA_OSCILL_DWELL_TIME2
43740 $SA_OSCILL_VELO
43750 $SA_OSCILL_NUM_SPARK_CYCLES
43760 $SA_OSCILL_END_POS
43770 $SA_OSCILL_CTRL_MASK
43780 $SA_OSCILL_IS_ACTIVE
1-472
SF
SETMS
G25
G26
LIMS
WALIMOF
WALIMON
FXST
FXSW
OSP1
OSP2
OST1
OST2
FA
OSNSC
OSE
OSCTRL
OS
10710
MD 番号
PROG_SD_RESET_SAVE_TAB[n]
更新される設定データ _ Index _ : 0...9
この表に示されている SD の値は,不揮発性メモリに保存される。つまり,電
源オン後も有効のままである。MMC 番号をバックアップリストに入力した設
定データは,リセット時に,パートプログラムの後で,
(バッファされた)有効
なファイルシステムに書込まれる。
図
設定データ
バックアップされた SRAM
NCK 電源オン
PROG_SD_RESET_SAVE_TAB が
提供されている場合,リセット,
M02,M30,あるいは M17 時
設定データ
ダイナミック RAM
パートプログラム
アプリケーション例
SD 43420: WORKAREA_LIMIT_PLUS (作業エリア制限プラス)および SD
43430: WORKAREA_LIMIT_MINUS (作業エリア制限マイナス)の値は,
RESET,M02,M30,あるいは M17 ごとに,バッテリでバックアップされた
RAM に保存される。
⇒ PROG_SD_RESET_SAVE_TAB[0] = 43420
⇒ PROG_SD_RESET_SAVE_TAB[1] = 43430
11450
MD 番号
初期設定 : 0
SEARCH_RUN_MODE
ブロックサーチ後のコントローラ応答
最小入力リミット : 0
保護レベル : 2/7
変更が有効になるための条件:電源オン
単位 : 適用開始 SW バージョン : 4.3
データタイプ : BYTE
意味 :
最大入力リミット : 1
このマシンデータは,ブロックサーチ完了後のコントローラ応答を定義する。
MD = 0: 標準応答
最後のアクションブロックが出力されてから NC 停止;VDI 信号 "Last
action block active"(最後のアクションブロックアクティブ)がイネー
ブルされる (DBB32.6); アラーム 10208 が出力される。
MD = 1: 最後のアクションブロックが出力されてから NC 停止;
VDI 信号 "Last action block active"(最後のアクションブロックアク
ティブ)がイネーブルされる;アラーム 10208 は,VDI 信号 "PLC
action terminated"(PLC アクション終了)をイネーブルすることによっ
て,PLC がこのアラームを要求した場合に出力される。
アプリケーション
PLC はブロックサーチ後に ASUP をスタートする。プログラム再開のために
NC スタートが必要であるということをオペレータに知らせるメッセージは,
ASUP 終了後にのみ表示されなければならない。
1-473
11450
MD 番号
SEARCH_RUN_MODE
ブロックサーチ後のコントローラ応答
参照
11600
MD 番号
BAG_MASK
ASUP に関するモード応答の定義
初期設定 : 0
最小入力リミット : 0
保護レベル : 2/4
変更が有効になるための条件:電源オン
単位 : HEX
適用開始 SW バージョン : 4.1
データタイプ : DWORD
意味 :
最大入力リミット : 3
この MD は,ASUP /割込みルーチンに関して,VDI 信号がモードグループ中の
チャンネルに及ぼす影響について説明する。
ビット 影響:
0|0
モードグループ信号に対して,すべてのグループチャンネルで通常のリア
クション(SW3 と同様)
割込みに応じて,すべてのチャンネルがプログラム動作モードに切換わる。
0|1
他のモードグループ VDI 信号は,割込みルーチンを実行しようとしてい
るチャンネルに対しては影響を与えない。
(モードグループ RESET,モー
ドグループ STOP)(タイプ A および タイプ B,動作モード選択)
(すぐに使用可)
11602
MD 番号
初期設定 : 0
1|0
予約済み
1|1
内部的な動作モードの切換えは,割込み要求を受入れたチャンネルでしか
発生しない。
ASUP_START_MASK
ASUP 用の停止条件の無視
最小入力リミット : 0
最大入力リミット : 3
保護レベル : 2/4
変更が有効になるための条件:電源オン
単位 : HEX
適用開始 SW バージョン : 4.1
データタイプ : DWORD
意味 :
このマシンデータは,ある ASUP のスタートに関して,どの停止条件が無視される
かを定義する。ASUP はスタートし,つまり,次の停止条件が無視される。
ビット 0 : STOP 理由:ストップキー,M0,あるいは M01
ビット 1 : すべての軸が基準化されていない場合でも,ASUP はスタートできる
ビット 2 : 読込みディスエーブルの場合でも,ASUP はスタートできる
他のビット:予約済み
関連性
ASUP_START_PRIO_LEVEL
参照
11604
MD 番号
初期設定 : 0
ASUP_START_PRIO_LEVEL
’ASUP_START_MASK effective’ の優先順位
最小入力リミット : 0
最大入力リミット : 128
保護レベル : 2/4
変更が有効になるための条件:電源オン
単位 :
適用開始 SW バージョン : 4.1
データタイプ : INT
意味 :
このマシンデータは,マシンデータ ASUP_START_MASK を適用する際の基準とな
る ASUP 優先順位を定義する。MD ASUP_START_MASK は,ここで指定されたレ
ベルから最大 ASUP 優先レベル 1 まで適用される。
関連性
ASUP_START_MASK
参照
1-474
11610
MD 番号
ASUP_EDITABLE
RET および REPOS 用のユーザ別プログラム (ASUP) の起動
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 3
保護レベル : 2 / 7
変更が有効になるための条件 : 電源オン
データタイプ : DWORD
単位 : -
適用開始 SW バージョン : 4.2
この MD は,RET および REPOS を処理するために,ディレクトリ
_N_CUS_DIR に保存されているユーザ別ルーチン:_N_ASUP_SPF を,システ
ムによって提供されたルーチンの代わりに使用するかどうかを定義する。
意味 :
値:
意味:
0
ルーチン _N_ASUP_SPF を,RET についても REPOS についても起動し
ない。
1
ユーザ別ルーチン _N_ASUP_SPF を,RET について実行し,システムに
よって提供されたルーチンを,REPOS について実行する。
2
ユーザ別ルーチン _N_ASUP_SPF を,REPOS について実行し,システ
ムによって提供されたルーチンを,RET について実行する。
3
ユーザ別ルーチン _N_ASUP_SPF を,RET と REPOS の両方について実
行する。
関連性
MD 11612: ASUP_EDIT_PROTECTION_LEVEL
参照
/IAD/ Installation and Start-Up Guide 840D
11612
MD 番号
ASUP_EDIT_PROTECTION_LEVEL
RET および/または REPOS 用のユーザ別 ASUP の保護レベル
最小入力リミット : 0
初期設定 : 2
変更が有効になるための条件 : 電源オン
保護レベル : 2 / 7
データタイプ : DWORD
意味 :
最大入力リミット : 7
単位 : -
適用開始 SW バージョン : 4.2
RET および/または REPOS 用のユーザ別 ASUP の保護レベル このデータは,
MD 11610: ASUP_EDITABLE が 0 以外の値にセットされた場合にのみ有効とな
る。このマシンデータは,プログラム _N_ASU_CUS の保護レベルを定義する。
この MD は次の場合は ASUP_EDITABLE が 0 にセットされた場合
無意味
関連性
ASUP_EDITABLE
18360
MD 番号
初期設定 : 30
EXT_PROG_BUFFER_SIZE
1 つのプログラムレベル用の FIFO バッファのサイズ
最小入力リミット : -1
保護レベル : 2 / 7
変更が有効になるための条件:電源オン
1 つのプログラムレベル(メインプログラムあるいはサブプログラム)を
"Process from external memory" モードで処理するための FIFO バッファのサイズ。
関連性
参照
単位 : -
適用開始 SW バージョン : 4.2
データタイプ : DWORD
意味 :
最大入力リミット : -
/PGA/ Programming Guide, Advanced, Section 2
1-475
18362
MD 番号
初期設定 : 4
EXT_PROG_NUM
"Process from external memory" で同時に動作できる NCK 中のプログラムレベルの数
最小入力リミット : 0
保護レベル : 2 / 7
変更が有効になるための条件:電源オン
データタイプ : BYTE
意味 :
最大入力リミット : 13
単位 : -
適用開始 SW バージョン : 4.2
"Process from external memory" で、同時に動作できる NCK 中のプログラムレベルの
数。
システムリソースは,"Process from external memory" モードで,MMC <-> NCK 通信
用に使用される。可能なプログラムレベルの数は,マシンデータ EXT_PROG_NUM
でプログラムされる。
MD 18360 + MD 18362 用のメモリロケーションは,電源オン時に予約される。プロ
グラム実行中に,すべてのリソースがビジーであることをシステムが発見した場
合,アラーム 14600 でこのことが通知される。
関連性
参照
1-476
■ チャンネル別マシンデータ
20000
MD 番号
CHAN_NAME
初期設定 :CHAN1/CHAN2
最小入力リミット : 空白
最大入力リミット : 16 文字
変更が有効になるための条件:
即有効
保護レベル : 2
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1.1
意味 :
この MD でチャンネル名を定義できる。チャンネル名は,MMC 上に表示する
目的にしか使用されない。
20114
MODESWITCH_MASK
MD 番号
REPOS 用の設定
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
保護レベル :
単位 :
チャンネル名
電源オン
データタイプ : DWORD
適用開始 SW バージョン : 3.2
意味 :
MDA モードでプログラム中断後(たとえば,ワークピース上で測定を実行
し,ツール摩耗値を補正するために)
,あるいはツール破損後,JOG モードに
切換えることにより,ツールを手動で退避することができる。この場合,制
御装置は中断位置の座標を保存し,JOG モードで移動された差分を "Repos
offset" として示す。MDA モードが再び選択されると,軸を輪郭上に再位置決
めする。この応答は,このマシンデータを使用してキャンセルできる。
ビット 0 (LSB)= 0: MDA が停止ステータスで選択解除されると (JOG,
JOGREF,JOGREPOS,MDAREF,および MDAREPOS),
Repos システム ASUP が選択される。
ビット 0 (LSB) = 1: MDA が停止ステータスで選択解除されると (JOG,
JOGREF,JOGREPOS,MDAREF,および MDAREPOS),
Repos システム ASUP が選択されない。
ビット 1 (LSB) = 0: 再位置決めできないパートプログラムブロックで,NCK
がプログラムの実行を停止した場合,手動モードへ切換え
ようとすると,アラーム 16916 が発生する。
ビット 1 (LSB) = 1: 再位置決めのできないパートプログラムブロックで,NCK
がプログラムの実行を停止した場合,手動モードへ切換え
ようとしても,アラーム 16916 は発生しない。
関連性
1-477
20116
IGNORE_INHIBIT_ASUP
MD 番号
読込みディスエーブルを無視した ASUP の処理
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 0xFFFF
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 4.2
意味 :
読込みディスエーブルがアクティブであるにもかかわらず,ビットがセット
された割込みチャンネルについて,ユーザ ASUP を完全に処理する。
ビット 0 は割込みチャンネル 1 に割当てられる。
ビット 1 は割込みチャンネル 2 に割当てられる。
関連性
IGNORE_SINGLEBLOCK_ASUP
20117
MD 番号
IGNORE_SINGLEBLOCK_ASUP
SBL 処理を無視した ASUP
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 0xFFFF
変更が有効になるための条件 :
NEW_CONF
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 4.2
意味 :
SBL 処理モードが選択されているにもかかわらず,ビットがセットされた割
込みチャンネルについて,ユーザ ASUP を完全に処理する。
ビット 0 は割込みチャンネル 1 に割当てられる。
ビット 1 は割込みチャンネル 2 に割当てられる。
関連性
IGNORE_INHIBIT_ASUP
1-478
20150
CODE_RESET_VALUES[n]G
MD 番号
G コードグループ用の初期リセット _ G group no._ : 0...59
初期設定 : 以下を参照
小入力リミット : 0
大入力リミット : 14
変更が有効になるための条件 :
保護レベル : 2/7
単位 : -
電源オン
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
電源オンおよび/または RESET 中,あるいはパートプログラム終了中に,
MD 20110 RESET_MODE_MASK (SW 4 以前)および
MD:GCODE_RESET_MODE (SW 5 以降)のファンクションとして選択され
た G コードの定義,あるいは,パートプログラムスタート時に選択された G
コードの定義(MD 20112 START_MODE_MASK の設定による)。
各グループ中の G コードのインデックスは,初期値としてプログラムされな
ければならない。
G グループとその G ファンクションのリストについては,次を参照。
参照:YS840DI ユーザーズマニュアル・プログラミング編
1-479
20150
CODE_RESET_VALUES[n]G
MD 番号
G コードグループ用の初期リセット _ G group no._ : 0...59
アプリケーション
タイトル
グループ
GCODE_RESET_VALUES[0]
初期設定
1
GCODE_RESET_VALUES[1]
GCODE_RESET_VALUES[2]
GCODE_RESET_VALUES[3]
GCODE_RESET_VALUES[4]
GCODE_RESET_VALUES[5]
GCODE_RESET_VALUES[6]
GCODE_RESET_VALUES[7]
2
3
4
5
6
7
8
0 (非アクティブ)
0 (非アクティブ)
2 (STPPFIFO)
0 (非アクティブ)
1 (G17)
1 (G40)
1 (G530)
GCODE_RESET_VALUES[8]
GCODE_RESET_VALUES[9]
9
10
0 (非アクティブ)
1 (G60)
GCODE_RESET_VALUES[10]
GCODE_RESET_VALUES[11]
GCODE_RESET_VALUES[12]
GCODE_RESET_VALUES[13]
GCODE_RESET_VALUES[14]
GCODE_RESET_VALUES[15]
GCODE_RESET_VALUES[16]
GCODE_RESET_VALUES[17]
GCODE_RESET_VALUES[18]
GCODE_RESET_VALUES[19]
GCODE_RESET_VALUES[20]
GCODE_RESET_VALUES[21]
GCODE_RESET_VALUES[22]
GCODE_RESET_VALUES[23]
GCODE_RESET_VALUES[24]
GCODE_RESET_VALUES[25]
GCODE_RESET_VALUES[26]
GCODE_RESET_VALUES[27]
GCODE_RESET_VALUES[28]
GCODE_RESET_VALUES[29]
11
12
13
14
15
16
17
18
19
10
21
22
23
24
25
26
27
28
29
30
0 (非アクティブ)
1 (G601)
2 (G71)
1 (G90)
1 (G94)
1 (CFC)
1 (NORM)
1 (G450)
1 (BNAT)
1 (ENAT)
1 (BRISK)
1 (RTCPOF)
1 (CDOF)
1 (FFWOF)
1 (ORIWKS)
2 (RMI)
1 (ORIC)
1 (WALIMON)
1 (DIAMOF)
1 (COMPOF)
GCODE_RESET_VALUES[30]
GCODE_RESET_VALUES[31]
GCODE_RESET_VALUES[32]
GCODE_RESET_VALUES[33]
GCODE_RESET_VALUES[34]
GCODE_RESET_VALUES[35]
GCODE_RESET_VALUES[36]
GCODE_RESET_VALUES[37]
GCODE_RESET_VALUES[38]
GCODE_RESET_VALUES[39]
GCODE_RESET_VALUES[40]
:
GCODE_RESET_VALUES[46]
:
31
32
33
34
35
36
37
38
39
40
41
:
46
:
1 (非アクティブ)
1 (非アクティブ)
1 (FTCOF)
1 (OSOF)
1 (SPOF)
1 (PDLAYON)
1 (FNOORM)
1 (SPF1)
1 (CPRECOF)
1 (CUTCONOF)
1 (LFOF)
GCODE_RESET_VALUES[59]
60
1 (定義されていない)
1 (G00)
1 (LFTXT)
例 G91 (G90 の代わり ) は,G グループ 14 で初期設定として有効にならなけれ
ばならない。
GCODE_RESET_VALUES[13] = 2
1-480
20160
CUBIC_SPLINE_BLOCKS
MD 番号
C スプライン用のブロックの数
初期設定 : 8
最小入力リミット : 4
最大入力リミット : 9
変更が有効になるための条件 :
保護レベル : 2
単位 : -
電源オン
データタイプ : Byte
適用開始 SW バージョン : 1.1
意味 :
C スプラインファンクションを使用して,スプラインセクションを計算する
モーションブロックの数。
この値が大きいほど,生成される輪郭は理想的で数理的な C スプラインに近
くなる。しかし,値が大きいほど,ブロックサーチ計算時間は長くなる。
参照
YS840DI ユーザーズマニュアル・プログラミング編
20170
COMPRESS_BLOCK_PATH_LIMIT
MD 番号
圧縮時の NC ブロックの最大移動長
初期設定 : 1.0
最小入力リミット : 0
最大入力リミット : plus
変更が有効になるための条件 :
保護レベル : 2
単位 : mm,度
電源オン
データタイプ :DOUBLE
適用開始 SW バージョン : 1.1
意味 :
このマシンデータは,圧縮が可能なブロックの最大移動長を定義する。それ
より長いブロックは圧縮を中断し,通常どおりに移動する。
関連性
MD 33100: COMPRESS_POS_TOL (圧縮時の最大公差)
参照
/PA/, Programming Guide: Fundamentals
20200
CHFRND_MAXNUM_DUMMY_BLOCKS
MD 番号
面とり/丸め用のダミーブロック
初期設定 : 3
最小入力リミット : 0
最大入力リミット : 15
変更が有効になるための条件 :
保護レベル : 2
単位 : -
電源オン
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
この MD は,面とり/丸めが有効なときに,移動情報を持つ 2 つのブロック
の間にプログラムすることのできる,補償平面中の,移動情報を持たないブ
ロック(ダミーブロック)の最大数を定義する。
1-481
アプリケーション例
移動情報を持たない 2 つのブロック
20610
MD 番号
ADD_MOVE_ACCEL_RESERVE
初期設定 : 0.2
最小入力リミット : 0
最大入力リミット : 0.9
変更が有効になるための条件 :
保護レベル : 2
単位 : -
オーバレイド動作用の加速予約
電源オン
データタイプ : DOUBLE
適用開始 SW バージョン : 1.1
意味 :
このマシンデータの値は,MD 32300: MAX_AX_ACCEL (最大軸加速)の設
定で積算される。その結果得られた値が加速値である。ファンクション "Fast
retraction from the contour"(輪郭からの早送りリトラクション)が有効になる
と,最大軸加速はこの加速値によって減速する。これは,輪郭からの早送り
リトラクション中にオーバレイド動作を速度制御するための加速を十分に予
約しておくために行われる。
参照
YS840DI ユーザーズマニュアル・プログラミング編
20650
MD 番号
THREAD_START_IS_HARD
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
保護レベル : 2
単位 : -
ねじ切り加工時の軸の加速挙動
電源オン
データタイプ :BOOLEAN
最終適用 SW バージョン : 4.x,SW ステータス 5.1 以降,
SD 42010: THREAD_RAMP_DISP を参照
意味 :
1: G33 (G34,G35) を使用したねじ切り加工時に,スレッドスタート角度が速
度ランプを使用せずに超過したときの位置が主軸位置にリンクされる。
0: ねじ切り加工時の送り軸が,速度ランプを使用してスタートする
(BRISK/SOFT プログラミングに応じて加速)
。
1-482
20660
THREAD_AUTO_LIFTFASTANGLE (SW 4.3 以降で無効)
MD 番号
後退角度の定義(ねじ切り加工)
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
保護レベル : 2/7
単位 : -
電源オン
データタイプ :BOOLEAN
最終適用 SW バージョン : 4.2
意味 :
G33 (G34,G35) によるねじ切り加工中断時の後退角度の定義。
1: 後退モーションを開始すると,後退角度が内部的に計算される。この角度
は,ねじ切り加工がプログラムされている軸に対して常に直交する。円筒
ねじからテーパースレッドへ移行( ≦ 45 度)することにより,後退の
方向が変更されることはない。
0: 後退角度を決定するために,ALF がプログラムされる。この角度は,後退
時に直ちに補間される輪郭のタンジェントのことをいう。
21000
MD 番号
CIRCLE_ERROR_CONST
初期設定 : 0.01
最小入力リミット : 0
最大入力リミット : plus
変更が有効になるための条件 :
保護レベル : 2
単位 : mm
円終点監視定数
電源オン
データタイプ :DOUBLE
適用開始 SW バージョン : 1.1
意味 :
このマシンデータは許容絶対円差を定義する。
円プログラミングの際,プログラムされた中心点から始点までの半径と,中
心点から終点までの半径は通常等しくならない(この円は "overdefined"(定
義しすぎである)
)。
この 2 つの半径の間の,アラームがトリガされることのない最大許容差は,
次のデータでそれより大きい値によって定義される:
- CIRCLE_ERROR_CONST
- MD 21010: CIRCLE_ERROR_FACTOR
を積算したスタート半径 つまり,公差は,小さい円については固定値
(CIRCLE_ERROR_CONST) で,大きい円についてはスタート半径に比例する。
アプリケーション例
CIRCLE_ERROR_CONST = 0.01 10μm
CIRCLE_ERROR_FACTOR = 0.001
これらの MD,および半径が → 10 mm の場合,定数が有効となり,> 10 mm
の場合,比例係数が有効となる。
関連性
MD 21010: CIRCLE_ERROR_FACTOR (円終点監視係数)
21010
MD 番号
CIRCLE_ERROR_FACTOR
初期設定 : 0.001
最小入力リミット : 0
最大入力リミット : plus
変更が有効になるための条件 :
保護レベル : 2
単位 : 係数
円終点監視係数
電源オン
データタイプ :DOUBLE
意味 :
適用開始 SW バージョン : 1.1
許容半径差用の係数
大きい円の開始半径と終了半径が最大でどれだけすれていてもよいかを示す
係数を定義する
(MD 21000: CIRCLE_ERROR_CONST 円終点監視定数も参照)
。
1-483
21200
LIFTFAST_DIST
MD 番号
輪郭からの早送りリトラクション用の移動距離
初期設定 : 0.1
最小入力リミット : 0
最大入力リミット : plus
変更が有効になるための条件 :
保護レベル : 2
単位 : mm
電源オン
データタイプ :DOUBLE
適用開始 SW バージョン : 1.1
意味 :
このマシンデータは,早送りリトラクションの移動の絶対長を決定する。移
動の方向は,コマンド ALF によってパートプログラム中で定義される。
参照
YS840DI ユーザーズマニュアル・プログラミング編
21210
MD 番号
SETINT_ASSIGN_FASTIN
割込み用の NCK 入力バイト
初期設定 : 1
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
保護レベル : 2 / 7
単位 : -
電源オン
データタイプ :DWORD
適用開始 SW バージョン : 2 ext. in 5
意味 :
NC プログラム割込み用の高速入力バイトのハードウェア割当て
ビット 0 ~ 7:
使用される入力の番号
ビット 16 ~ 23
ビット 24 ~ 31
チャンネルが評価しない信号のマスク
評価される信号のマスク
ビットセット:立ち下がりエッジによってトリガ
された割込み
可能な入力:
1:
840D のオンボード入力(4 高速 + VDI コマンドによる 4 ビット)
2 ~ 5:
外部デジタル入力(高速 NCK I/O あるいは VDI コマンド)
1228 ~ 129: コンパレータバイト(高速アナログ入力あるいは VDI コマンド
によって生じた)
22500
GCODE_OUTPUT_TO_PLC
MD 番号
PLC への G ファンクション出力(SW バージョン 3.1 まで)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ :BOOLEAN
適用開始 SW バージョン : 1.1
意味 :
0: G コードは PLC に出力されない
1: プログラムされた G コードが PLC に出力される。
ブロックに最も新しくプログラムされた G コードが出力される。出力は 8 G
コードまでに制限される。
1-484
22510
GCODE_GROUPS_TO_PLC
MD 番号
ブロック変更/リセット時に NCK/PLC インタフェースへ
出力される G コード(SW 3.2 以降)
初期設定 : 0000 0000, ...
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ :BYTE
適用開始 SW バージョン : 3.2
意味 :
ブロック変更/リセット時に NCK/PLC へ出力される G コードの仕様 インタ
フェースは,ブロックを変更およびリセットするたびに更新される。
例外,エラー
PLC ユーザプログラムが,一定の時間に,アクティブな NC ブロックと適用
された G コードとの間にブロック同期接続を確立するとは保証できない。
例:ブロックが非常に短い連続パスモード
■ 送り軸/主軸別マシンデータ
30600
FIX_POINT_POS
MD 番号
G75 を使用した軸の固定値位置
初期設定 : 0
最小入力リミット : 0
最大入力リミット : ***
変更が有効になるための条件 :
保護レベル : 2
単位 : mm, 度
電源オン
データタイプ :DOUBLE
意味 :
適用開始 SW バージョン : 1.1
G75 がプログラムされているときにアプローチできる軸ごとの固定点位置
(最大 2)は,このマシンデータに入力される。
アプリケーション例
第 2 固定点へのトラバース:G75 X1=0 FP=2 (この軸についてダミー値(こ
こでは 0)を定義しなければならない)
。
参照
YS840DI ユーザーズマニュアル・プログラミング編
1-485
33100
COMPRESS_POS_TOL
MD 番号
補正時の最大ずれ量
初期設定 : 0.1
最小入力リミット : 0
最大入力リミット : plus
変更が有効になるための条件 :
電源オン ,NEW_CONF
保護レベル : 2
2 単位 : mm
(SW4.2 以降)
データタイプ :DOUBLE
適用開始 SW バージョン : 1.1
意味 :
この値は,圧縮時の,軸ごとの最大許容パスのずれ量を指定する。この値が
大きいほど,1 つの長いブロックに圧縮できる短いブロックの数は多くなる。
圧縮可能なブロックの最大数は,スプラインバッファのサイズにより制限さ
れる(現在は 10 ブロック)。
位置値
COMPRESS_POS_TOL(Y 軸)
Y軸
COMPRESS_POS_TOL(X 軸)
ポジション値
X軸
YS840DI ユーザーズマニュアル・プログラミング編
参照
■ チャンネル別設定データ
42000
SD 番号
THREAD_START_ANGLE
初期設定 : 0
最小入力リミット : 0
最大入力リミット : プラス
変更が有効になるための条件:
即有効
保護レベル:MMC-MD: 9220
単位 : 度
データタイプ :DOUBLE
適用開始 SW バージョン : 1.1
意味 :
複数ターンスレッド切削時の,スレッドターンとスレッドターンの間のオフ
セットはこのマシンデータにセットされる。
この設定データは,パートプログラム中の SF コマンドを使用して変更でき
る。初期設定は,NC リセット時にアクティブになる。
参照
/PA/, Programming Guide Fundamentals
ねじ切り加工用のスタート角度
1-486
42010
THREAD_RAMP_DISP
SD 番号
ねじ切り加工時の送り軸の加速動作
初期設定 : -1
最小入力リミット : -1
最大入力リミット : プラス
変更が有効になるための条件:
即有効
保護レベル:MMC-MD: 0
単位 : mm/inch
データタイプ :DOUBLE
適用開始 SW バージョン : 5.1
意味 :
ねじ切り加工時の送り軸のスタート(インデックス 0)および減速距離(イン
デックス 1)
:
-1: 送り軸のスタート/減速は,設定された加速を使用して実行する。現
在の BRISK/SOFT プログラミングに応じた加減速。
0: ねじ切り加工時の,送り軸の急激なスタート/減速。
>0: 最大スタート/減速距離を定義する。定義された距離が原因で軸が加速過
負荷を起こす可能性がある。
この SD は,DITS (インデックス 0)および DITE (インデックス 1)がプロ
グラムされると,ブロックから書込まれる。初期設定は,NC リセット時に有
効になる。
例:
$SC_THREAD_RAMP_DISP[0]=2
パスで動作 2 mm
参照
1.18 送り機能 (V1)
42700
SD 番号
EXT_PROG_PATH
初期設定 : -
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件:
即有効
保護レベル : 2
単位 : -
データタイプ :STRING
適用開始 SW バージョン : 4.2
意味 :
サブプログラムコール EXTCALL 用の外部プログラムパスの名称は,ここで
指定できる。
合計パスは,SD 42700 EXT_PROG - PATH + のストリング + プログラムされた
サブプログラム名から構成される。
例:
/_N_WKS_DIR/_N_WKST1_DIR /ROUGHING_SPF
参照
/PGA/ Programming Guide, Advanced, Section 2
サブプログラムコール EXTCALL 用の外部プログラムパスの名称
1-487
1.10.5 信号の説明
■ モードグループ別信号
DB11, ...
DBX0.0
AUTOMATIC mode (AUTOMATIC モード)
モードグループへの信号 (PLC → NCK)
データブロック
エッジ評価 : なし
信号更新 :
信号ステータス 1 あるいは
信号遷移 0 ---> 1
AUTOMATIC モードが PLC プログラムによって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
AUTOMATIC モードが PLC プログラムによって選択されない。
この信号は次の場合は無意味
"Operating mode switchover inhibit" (DB11, ... DBX0.4) 信号 = 1 の場合
関連性
IS "Active AUTOMATIC mode" (DB11, ... DBX6.0)
DB11, ...
DBX0.1
MDA mode (MDA モード)
信号が有効となる最初の
SW バージョン : 1.1
モードグループへの信号 (PLC → NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
MDA モードが PLC プログラムによって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
MDA モードが PLC プログラムによって選択されない。
この信号は次の場合は無意味
IS "Operating mode switchover inhibit" (DB11, ... D0.4) 信号 = 1 の場合
関連性
IS "Active MDA mode" (DB11, ... DBX6.1)
DB11, ...
DBX0.2
JOG mode (JOG モード)
信号が有効となる最初の
SW バージョン : 1.1
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
JOG モードが PLC プログラムによって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
JOG モードが PLC プログラムによって選択されない。
この信号は次の場合は無意味
"Operating mode switchover inhibit" (DB11, ... DBX0.4) 信号 = 1 の場合
関連性
IS "Active mode JOG" (DB11, ... DBX6.2)
1-488
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX0.4
Mode switchover disable (モード切換えディスエーブル)
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
モードグループの現在アクティブなモード(JOG,MDA あるいは
AUTOMATIC)は変更できない。モードグループ内で選択されたマシンファ
ンクションは変更できる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
モードグループのモードを変更できる。
図
モード選択
信号が有効となる最初の
SW バージョン : 1.1
AUTOMATIC モー
ド
モード切換え
ディスエーブル
MDA モード
JOG モード
DB11, ...
DBX0.5
Mode group stop (モードグループ停止)
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
NC 停止がモードグループのすべてのチャンネルに対して起動する。アクティ
ブなチャンネルすべてのチャンネルステータスが中断に切換わる。チャンネ
ルステータスリセットにあるすべてのチャンネルはリセットステータスのま
まである。この時点で実行中のプログラムは直ちに中断し(1 つのブロック内
でも,可能なかぎり早い時点で)
,プログラムステータスは停止に切換わる。
モードグループの移動中の軸はすべて,指令軌跡から外れることなく,その
加速特性に基づいて減速する。プログラムは NC スタートで再開できる。
モードグループのスピンドルは影響を受けない。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
チャンネルステータスおよびプログラムランは影響を受けない。
例外,エラー
プログラムあるいはプログラムブロックによってトリガされないモードグ
ループのすべての軸(たとえば,マシン制御パネル上で送りキーを操作した
ために移動中の軸)はモードグループ停止によって減速停止する。
1-489
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX0.6
データブロック
Mode group stop axes plus spindles
(モードグループ軸停止 ( 送り軸及び主軸)
)
モードグループへの信号 (PLC ---> NCK)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
NC 停止がモードグループのすべてのチャンネルに対して起動する。アクティ
ブなチャンネルすべてのチャンネルステータスが中断に切換わる。チャンネ
ルステータスリセットにあるすべてのチャンネルはリセットステータスのま
まとなる。この時点で実行中のプログラムは直ちに中断し(1 つのブロック内
でも,可能なかぎり早い時点で),プログラムステータスは停止に切換わる。
モードグループの移動中の軸はすべて,輪郭を違反することなく,その加速
特性に基づいて減速する。プログラムは NC スタートで再開できる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
チャンネルステータスおよびプログラムランは影響を受けない。
例外,エラー
プログラムあるいはプログラムブロックによって起動されないモードグルー
プのすべての送り軸および主軸(たとえば,マシン制御パネル上でトラバー
スキーを操作したためにトラバース中の軸,PLC によって制御されているス
ピンドル)は,"Mode group stop axes plus spindles" によって減速停止する。
DB11, ...
DBX0.7 et
Mode group reset (モードグループリセット)
信号が有効となる最初の
SW バージョン : 1.1
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : あり
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
リセットがモードグループのすべてのチャンネルに対して起動する。全チャ
ンネルがチャンネルステータスリセットに入る。現在のプログラムはすべて
プログラムステータス強制終了に入る。移動中のすべての送り軸と主軸は,
その直線減速指令に従って,指令軌跡から外れることなく,ゼロ速度まで減
速する。初期設定がセットされる(例,G ファンクション用)
。モードグルー
プ用のアラームは,電源オンアラームでなければ,クリアされる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
チャンネルステータスおよびプログラムランはこの信号の影響を受けない。
関連性
IS "Channel reset" (DB21, ... DBX7.7)
IS "All channels in reset state" (DB11, ... DBX6.7)
例外,エラー
IS "Mode group ready" をキャンセルするアラームが発生すると,モードグルー
プ内の全チャンネルはリセットステータスではなくなる。別の動作モードへ
切換えるためには,モードグループリセット (DB11, ... DBX0.7) を実行しなけ
ればならない。
1-490
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX1.0
Machine function TEACH IN (マシンファンクション TEACH IN)
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション TEACH IN は,モードグループについて,JOG モード
で起動する。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション TEACH IN は起動しない。
この信号は次の場合は無意味
JOG モードがアクティブでない場合。
参照
YS840DI ユーザーズマニュアル・操作編
DB11, ...
DBX1.1
Machine function REPOS (マシンファンクション REPOS)
信号が有効となる最初の
SW バージョン : 1.1
モードグループへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REPOS が,モードグループについて,JOG モードで起
動する。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REPOS は起動しない。
この信号は次の場合は無意味
JOG モードがアクティブでない場合。
アプリケーション
パートプログラムオペレーション中のエラー(例,ツール破損)のために,
軸はエラーの場所から JOG モードで起動される。その後,プログラムを
AUTOMATIC モードで再開できるよう,マシンファンクション REPOS を使用
して,軸を以前の正確な位置まで手動で戻すことができる。
参照
YS840DI ユーザーズマニュアル・操作編
DB11, ...
DBX1.2
Machine function REF (マシンファンクション REF)
モードグループへの信号 (PLC ---> NCK)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REF が,モードグループについて,JOG モードで起動
する。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REF が起動しない。
この信号は次の場合は無意味
JOG モードがアクティブでない場合。
参照
1.16 原点復帰 (R1)
1-491
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX4.0
Selected mode AUTOMATIC (選択モード AUTOMATIC)
モードグループからの信号 (MMC ---> PLC)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
AUTOMATIC モードが MMC によって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
AUTOMATIC モードが MMC によって選択されない。
DB11, ...
DBX4.1
信号が有効となる最初の
SW バージョン : 1.1
Selected mode MDA (選択モード MDA)
モードグループからの信号 (MMC ---> PLC)
データブロック
エッジ評価 :
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
MDA モードが MMC によって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
MDA モードが MMC によって選択されない。
DB11, ...
DBX4.2
Selected mode JOG (選択モード JOG)
モードグループからの信号 (MMC ---> PLC)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
JOG モードが MMC によって選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
JOG モードが MMC によって選択されない。
DB11, ...
DBX5.0
Selected machine function TEACH IN
データブロック
信号が有効となる最初の
SW バージョン : 1.1
(選択されたマシンファンクション TEACH IN)
モードグループからの信号 (MMC ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション TEACH IN が MMC によってモードグループで選択さ
れる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
マシンファンクション TEACH IN が MMC によって選択されない。
参照
YS840DI ユーザーズマニュアル・操作編
1-492
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX5.1
データブロック
Selected machine function REPOS
(選択されたマシンファンクション REPOS)
モードグループからの信号 (MMC ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REPOS が MMC によってモードグループで選択され
る。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REPOS が MMC によって選択されない。
アプリケーション
パートプログラムオペレーション中のエラー(例,ツール破損)のために,
軸はエラーの場所から JOG モードで起動される。その後,プログラムを
AUTOMATIC モードで再開できるよう,マシンファンクション REPOS を使用
して,軸を以前の正確な位置まで手動で戻すことができる。
参照
YS840DI ユーザーズマニュアル・操作編
DB11, ...
DBX5.2
Selected machine function REF (選択されたマシンファンクション REF)
モードグループからの信号 (MMC ---> PLC)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REF が MMC によってモードグループで選択される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REF が MMC によって選択されない。
参照
1.16 原点復帰 (R1)
DB11, ...
DBX6.0
Active mode AUTOMATIC (アクティブモード AUTOMATIC)
信号が有効となる最初の
SW バージョン : 1.1
モードグループからの信号 (NCK ---> PLC)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
AUTOMATIC モードはアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
AUTOMATIC モードはアクティブでない。
DB11, ...
DBX6.1 データブロック
Active mode MDA (アクティブモード MDA)
エッジ評価 :
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
MDA モードはアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
MDA モードはアクティブでない。
信号が有効となる最初の
SW バージョン : 1.1
モードグループからの信号 (NCK ---> PLC)
1-493
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX6.2
Active mode JOG (アクティブモード JOG)
モードグループからの信号 (NCK ---> PLC)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
JOG モードはアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
JOG モードはアクティブでない。
DB11, ...
DBX6.3
Mode group ready (モードグループレディ)
モードグループからの信号 (NCK ---> PLC)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
この信号は電源オン後,電圧が規定値に達したときにセットされる。モード
グループはレディとなり,パートプログラムを処理することができ,軸は
個々のチャンネルで移動できる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
モードグループはレディでない。
考えられる原因:
- 重大な送り軸アラームあるいは主軸アラームがアクティブである
- ハードウェア故障
- モードグループが適切に構成されていない(マシンデータ)モードグループ
信号が有効となる最初の
SW バージョン : 1.1
レディ信号が "0" ステータスに変化した場合
- 送り軸および主軸ドライブが最大制動電流で減速停止した - PLC から NCK
への信号は,非アクティブステータスにセットされている(初期設定)
例外,エラー
IS "Mode group ready" をキャンセルするアラームは,モードグループ中の全
チャンネルがもはやリセットステータスにはないということを保証する。別
の動作モードへ切換えるためには,モードグループリセット (DB11, ...
DBX0.7) を開始しなければならない。
DB11, ...
DBX6.7
All channels in Reset state (リセットステータスの全チャンネル)
モードグループからの信号 (NCK ---> PLC)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
このモードグループに属するすべてのチャンネルは "Channel status reset" ス
テータス (DB21, ... DBX7.7) に入っている。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
モードグループ中の少なくとも 1 つのチャンネルが "Channel status reset"
(DB21, ... DBX7.7) に入っていない。
関連性
IS "Channel status reset" (DB21, ... DBX7.7)
1-494
信号が有効となる最初の
SW バージョン : 1.1
DB11, ...
DBX7.0
データブロック
Active machine function TEACH IN
(アクティブマシンファンクション TEACH IN)
モードグループからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション TEACH IN がモードグループでアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション TEACH IN がアクティブでない。
参照
YS840DI ユーザーズマニュアル・操作編
DB11, ...
DBX7.1
Active machine function REPOS (アクティブマシンファンクション REPOS)
モードグループからの信号 (NCK ---> PLC)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REPOS がモードグループでアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REPOS がアクティブでない。
アプリケーション
パートプログラムオペレーション中のエラー(例,ツール破損)のために,
軸はエラーの場所から JOG モードで起動される。その後,プログラムを
AUTOMATIC モードで再開できるよう,マシンファンクション REPOS を使用
して,軸を以前の正確な位置まで手動で戻すことができる。
参照
YS840DI ユーザーズマニュアル・操作編
DB11, ...
DBX7.2
Active machine function REF (アクティブマシンファンクション REF)
信号が有効となる最初の
SW バージョン : 1.1
モードグループからの信号 (NCK ---> PLC)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
マシンファンクション REF がモードグループでアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マシンファンクション REF がアクティブでない。
参照
1.16 原点復帰 (R1)
1-495
信号が有効となる最初の
SW バージョン : 1.1
■ チャンネル別信号
DB21, ...
DBX0.4
Activate single block (単一ブロックの起動)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
プログラムは,AUTOMATIC モードおよび MDA モードにおいて,シングル
ブロックモードで処理される。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
影響なし
アプリケーション
個々のプログラムステップをより正確に監視するために,新規のプログラム
を単一ブロックモードで初めにテストすることができる。
例外,エラー
- 工具径補償が選択されている場合は,挿入ブロックを挿入できる。- ドライ
ランフィードレートが選択されている場合,シングルブロックモードは,
一連の G33 ブロックにしか適用できない。
- シングルデコーディングブロックモードがアクティブな場合,計算ブロック
はシングルステップモードで処理されない。
関連性
IS "Program status interrupted" (DB21, ... DBX35.3)
参照
1.10.2「■プログラムテスト」
DB21, ...
DBX0.5
Activate M01 (M01 の起動)
信号が有効となる最初の
SW バージョン : 1.1
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
AUTOMATIC モードまたは MDA モードで処理しているときは,パートプロ
グラムでプログラムされた M01 がプログラム停止になる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
パートプログラムでプログラムされた M01 はプログラム停止にならない。
関連性
IS "M01 selected" (DB21, ... DBX24.5)
IS "M0/M01 active" (DB21, ... DBX32.5)
1-496
信号が有効となる最初の
SW バージョン : 1.1
DB21, ...
DBX1.7
Activate program test (プログラムテストの起動)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
軸ディスエーブルがすべての送り軸(主軸を除く)に対して内部的にセット
される。したがって,パートプログラムブロックあるいはパートプログラム
を処理している間は,マシン軸は動作しない。軸動作は,軸位置値を変更す
ることにより,オペレータインタフェース上でシミュレートされる。表示用
の軸位置値は,計算された指令位置から生成される。
パートプログラムは通常どおりに処理される。
ツール管理:軸ディスエーブルのために,ツールマガジンの割当ては,プロ
グラムテスト中は変更されない。PLC アプリケーションは,ツール管理シス
テムのデータとマガジンのデータの完全性が失われていないということを保
証しなければならない(ツールボックスディスケット上の例を参照)
。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
パートプログラムの処理は,ファンクションプログラムテストの影響を受け
ない。
関連性
IS "Program test selected" (DB21, ... DBX25.7)
IS "Program test active" (DB 21-22, DBX33.7)
DB21, ...
DBX2.0
Skip block (スキップブロック)
チャンネルへの信号 (PLC ---> NCK)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
パートプログラムで,斜線 (/) の付いたブロックがスキップされる。一連のス
キップブロックが存在する場合,最初のブロックが解析される前に,
(できれ
ば NC スタートの前に)、信号が無効となっている場合にのみこの信号はアク
ティブになる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
マークされたパートプログラムブロックはスキップされない。一連のブロッ
クは,最初のブロックを処理する前にこの信号が 0 ステータスになっている
場合にのみ処理される。
関連性
IS "Skip block selected" (DB21, ... DBX26.0)
IS "Program status stopped" (DB21, ... DBX35.2)
1-497
信号が有効となる最初の
SW バージョン : 1.1
DB21, ...
DBX6.1
Read-in disable (読込みディスエーブル)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
補間器に対する次のブロックのデータ転送がディスエーブルされる。この信
号は,AUTOMATIC モードおよび MDA モードでのみアクティブである。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
補間器に対する次のブロックのデータ転送がイネーブルされる。この信号は,
AUTOMATIC モードおよび MDA モードでのみアクティブである。
アプリケーション
補助ファンクションを実行してから,次のブロックを処理しなければならな
い場合(例,ツールチェンジの場合),自動的なブロックの切り替えを,読込
みディスエーブルを使用して禁止しなければならない。
信号が有効となる最初の
SW バージョン : 1.1
1 バッファメモリにブロックを読込む
2 処理されるブロック
3 読込みディスエーブル信号
4 データ転送
5 補間器の内容
6 補助ファンクションの出力
7 補間器へのデータ転送
8 ツールチェンジ用の読込みディスエーブル
9 読込みディスエーブル用のロケーションのスキャン
10 読込みディスエーブルのキャンセル
関連性
IS "Program status running" (DB21, ... DBX35.0)
1-498
DB21, ...
DBX6.4
Program level abort (プログラムレベル強制終了)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : あり
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
信号が 0 -> 1 へ遷移するたびに,処理中の現在のプログラムレベル(サブプ
ログラムレベル,非同期サブプログラムレベル,セーブルーチン)が直ちに
強制終了する。パートプログラムの処理は,終了点の後で,現在のレベルよ
り 1 レベル上の状態で再開する。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
影響なし
例外,エラー
メインプログラムレベルは,この IS で強制終了できない。IS "Reset" でのみ強
制終了が可能。
DB21, ...
DBX7.0
データブロック
信号が有効となる最初の
SW バージョン : 1.1
NC start disable (NC スタートディスエーブル)
チャンネルへの信号 (PLC ---> NCK)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
IS "NC start" および パートプログラムからの START コマンドは無効である。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
IS "NC start" およびパートプログラムからの START コマンドはアクティブで
ある。
アプリケーション
更新されたプログラムの処理を抑止する(たとえば,潤滑油がないために)
際に,この信号を使用する。
関連性
IS "NC Start" (DB21, ... DBX7.1)
DB21, ...
DBX7.1
NC Start (NC スタート)
チャンネルへの信号 (PLC ---> NCK)
信号が有効となる最初の
SW バージョン : 1.1
データブロック
エッジ評価 : yes
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
AUTOMATIC モード:選択された NC プログラムがスタート,あるいは再開
し,プログラム中断中メモリに置かれていた補助ファンクションが出力され
る。
プログラムステータス "program interrupted" 中にデータが PLC から NC へ転送
された場合,このデータは NC スタート時に直ちに計算される。
MDA モード:入力されたブロック情報あるいはパートプログラムブロック
が,実行のためにリリースされる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
影響なし
関連性
IS "NC Start disable" (DB21, ... DBX7.0)
1-499
信号が有効となる最初の
SW バージョン : 1.1
DB21, ...
DBX7.2
NC Stop at block limit (ブロックリミットでの NC 停止)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
現在のパートプログラムブロックを処理してから,現在の NC プログラムを
停止する。そうでない場合は,IS "NC Stop" DB21, ... DBX7.3 と同様。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
影響なし
関連性
IS "NC Stop" (DB21, ... DBX7.3)
IS "NC Stop axes plus spindles" (DB21, ... DBX7.4)
IS "Program status stopped" (DB21, ... DBX35.2)
IS "Channel status interrupted" (DB21, ... DBX35.6)
1-500
信号が有効となる最初の
SW バージョン : 1.1
DB21, ...
DBX7.3
NC Stop (NC 停止)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
現在の NC プログラムを直ちに停止し,現在のブロックを完了しない。軸だ
けを停止する。軸は,指令形状に従って制御停止する。スタート信号が与え
られるまで,移動距離は完了しない。プログラムステータスは停止に切換わ
り,チャンネルステータスは中断に切換わる。JOG で相対距離を移動してい
る場合,この動作は強制終了する。残りの移動量は,新規に NC スタートす
るまで移動しない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
影響なし
アプリケーション
NC プログラムが停止した場合,たとえば,補助ファンクションをメモリに入
れることができる。この補助ファンクションは,次の NC スタート時に実行
される。NC スタート時に,プログラムは中断点から再開する。プログラム中
断中に,補助ファンクションをメモリに入れると,最初の NC スタート時に
は補助ファンクションしかアクティブにならない。2 回目の NC スタート時
に,プログラムが再開する。
信号が有効となる最初の
SW バージョン : 1.1
IS "NC stop"(NC 停止)
IS "NC start"(NC スタート)
プログラム実行中
軸動作中
処理されるブロック
例外,エラー ,
NC 停止は少なくとも 1 PLC サイクルでアクティブにならなければならない。
NC 停止時にデータを NC に転送する場合(例,ツールオフセット)
,その
データは NC スタート時に全て計算される。
関連性
IS "NC Stop at block limit" (DB21, ... DBX7.2)
IS "NC Stop axes plus spindles" (DB21, ... DBX7.4)
IS "Program status stopped" (DB21, ... DBX35.2)
IS "Channel status interrupted" (DB21, ... DBX35.6)
1-501
DB21, ...
DBX7.4
NC Stop axes plus spindles (NC 停止送り軸および主軸)
チャンネルへの信号 (PLC ---> NCK)
データブロック
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは
信号遷移 0 ---> 1
現在の NC プログラムを直ちに停止し,現在のブロックは完了しない。新規
の NC スタートまで,移動距離は完了しない。送り軸および主軸が停止する。
送り軸と主軸は制御停止になる。プログラムステータスは停止に切換わり,
チャンネルステータスは中断に切換わる。
信号ステータス 0 あるいは
信号遷移 1 ---> 0
影響なし
この信号は次の場合は無意味
チャンネルステータスリセットの場合
プログラムステータス強制終了の場合
例外,エラー
プログラムあるいはプログラムブロックによって移動することのないすべて
の送り軸および主軸(たとえば,軸はマシン制御パネル上の送りキーで移動
する)は,"NC stop axes plus spindles" によって,ゼロ速度まで減速しない。
NC プログラムが停止した場合,たとえば,補助ファンクションをメモリに入
れることができる。
この補助ファンクションは,次の NC スタート時に実行される。NC スタート
時に,プログラムは中断点から再開する。プログラム中断中に,補助ファン
クションをメモリに入れると,最初の NC スタート時には補助ファンクショ
ンしかアクティブにならない。
2 回目の NC スタート時に,プログラムが再開する。信号 "NC stop axes plus
spindles" は,少なくとも 1 PLC サイクルで無効にならなければならない。"NC
stop axes plus spindles" 後に,データを NC に転送する場合(例,ツールオフ
セット)
,そのデータは NC スタート時に全て計算される。
信号が有効となる最初の
SW バージョン : 1.1
信号 NC 停止
軸信号 NC スタート
プログラム実行中
軸動作中
主軸実行中
処理されるブロック
1-502
DB21, ...
DBX7.4
NC Stop axes plus spindles (NC 停止送り軸および主軸)
チャンネルへの信号 (PLC ---> NCK)
データブロック
関連性
IS "NC Stop at block limit" (DB21, ... DBX7.2)
IS "NC Stop" (DB21, ... DBX7.3)
IS "Program status stopped" (DB21, ... DBX35.2)
IS "Channel status interrupted" (DB21, ... DBX35.6)
DB21, ...
DBX7.7
データブロック
Reset (リセット)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
チャンネルがリセットされる。初期設定がセットされる(例,G ファンク
ション)
。チャンネル用のアラームは,POWER ON アラームでないかぎり,
クリアされる。信号リセットは,PLC によって(たとえば,マシン制御パネ
ル上のリセットキーとの論理的組合わせによって)出力されなければならな
い。この信号は,選択されたチャンネルによってのみ評価される。
プログラムステータスは強制終了に切換わり,チャンネルステータスは
"Channel status Reset" に切換わる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
影響なし
関連性
IS "Mode group Reset" (DB11, ... DBX0.7)
IS "Channel status Reset" (DB21, ... DBX35.7)
DB21, ...
DBX24.5
データブロック
M01 selected (M01 選択)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
プログラム制御 "Activate M01" がオペレータインタフェース上で選択されてい
る。これによりファンクションは起動しない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラム制御 "Activate M01" は,オペレータインタフェースを介して選択さ
れていない。
関連性
IS "Activate M01" (DB11, ... DBX0.5)IS
"M00/M01 active" (DB21, ... DBX33.5)
DB21, ...
DBX25.7
データブロック
Program test selected (プログラムテスト選択)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
プログラム制御 "Program test" がオペレータインタフェースを介して選択され
ている。これによりファンクションは起動しない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラム制御 "Program test" は,オペレータインタフェースを介して選択さ
れていない。
関連性
IS "Activate program test" (DB21, ... DBX1.7)
IS "Program test active" (DB21, ... DBX33.7)
チャンネルへの信号 (PLC ---> NCK)
信号が有効となる最初の SW
バージョン : 1.1
チャンネルからの信号 (MMC ---> PLC)
信号が有効となる最初の SW
バージョン : 1.1
チャンネルからの信号 (MMC ---> PLC)
1-503
信号が有効となる最初の SW
バージョン : yes
DB21, ...
DBX32.5
データブロック
M00/M01 active (M00/M01 アクティブ)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
パートプログラムブロックが処理され,補助ファンクションが出力されてい
て,
- M00 が作業メモリに保存される
- M01 が作業メモリに保存され,IS "Active M01" がアクティブになる
プログラムステータスが "stopped" に切換わる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
- IS "NC Start" DB21, ... DBX7.1 を使用した場合
- リセットによるプログラムの強制終了時
チャンネルからの信号 (NCK ---> PLC)
信号が有効となる最初の SW
バージョン : 1.1
図
作業メモリへのデータ転送
処理されるブロック
M00 を使用した NC ブロック
M 変更信号(1 PLC サイクル時間)
M00/M01 アクティブ
NC スタート
関連性
DB21, ...
DBX33.4
データブロック
IS "Activate M01" (DB21, ... DBX0.5)
IS "M01 selected" (DB21, ... DBX24.5)
Block search active
(ブロックサーチアクティブ)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
"Block search" ファンクションがアクティブである。このファンクションはオ
ペレータインタフェースを介して選択され,IS "NC Start" によってスタートす
る。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
"Block search" ファンクションがアクティブでない。
アプリケーション
ブロックサーチファンクションを使用すると,パートプログラム中の一定の
ブロックへジャンプでき,そのブロックでパートプログラムの処理をスター
トできる。
参照
YS840DI ユーザーズマニュアル・操作編
1-504
信号が有効となる最初の SW
バージョン : 1.1
DB21, ...
DBX33.5
データブロック
M02/M30 active
(M02/M30 アクティブ)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号が有効となる最初の SW
バージョン : 1.1
信号ステータス 1 あるいは信号
遷移 0 ---> 1
- M02 あるいは M03 (サブプログラムがスタートした場合は,M17)を使用
した NC ブロックは完全に実行している。移動指令が同様にこのブロックに
プログラムされている場合,その目標位置に到達するまで,この信号は出力
されない。
- プログラムはリセットにより強制終了していて,プログラムステータスが
"aborted" (強制終了)に切換わる。
- MDA モードあるいはマシンファンクション REF または PRESET が選択され
ているとき
- "Acknowledge EMERGENCY STOP" (DB 10 DBX56.2) の後
信号ステータス 0 あるいは信号
遷移 1 ---> 0
- プログラムを終了あるいは強制終了しない
- 制御システムの電源オン後のステータス
- NC プログラムのスタート
図
作業メモリへのデータ転送
処理されるブロック
M02 を使用した NC ブロック
M 変更信号(1 PLC サイクル時間)
M02/M30 アクティブ
アプリケーション
この信号を使用して,PLC はプログラム処理の終了を発見でき,適切に対応
できる。
例外,エラー
- ファンクション M02 と M30 の優先順位が同じである。
- IS "M02/M30 active" がプログラム終了時に静的に適用される。
- ワークピースカウンティングや バーアドバンスなどの自動継続ファンク
ションには適さない。M02/M30 を別々のブロックにプログラムしなければ
ならず,M02/M30 という用語,あるいはデコードされた M 信号をこれらの
ファンクション用に使用しなければならない。
- プログラムの最後のブロックには,読込み停止の原因となる補助ファンク
ションや M02/M30 以外のファンクションで操作可能とならなければならな
い S 値が含まれていてはならない。
1-505
DB21, ...
DBX33.6
データブロック
Transformation active (変換アクティブ)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
NC コマンド TRAORI (アクティブ変換)を,NC パートプログラムにプログ
ラムする。このブロックが NC によって処理されたので,変換がアクティブ
になった。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
変換はアクティブでない。
参照
YS840DI ユーザーズマニュアル・プログラミング編
DB21, ...
DBX33.7
データブロック
チャンネルからの信号 (NCK ---> PLC)
信号が有効となる最初の SW
バージョン : 1.1
Program test active
(プログラムテストアクティブ)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
プログラム制御プログラムテストがアクティブである。軸ディスエーブルが
すべての軸(主軸を除く)に対して内部的にセットされる。したがって,
パートプログラムブロックあるいはパートプログラムが処理されている間は,
マシン軸は動作しない。しかし,軸動作は,軸位置値を変更することにより,
オペレータインタフェース上でシミュレートされる。表示用の軸位置値は,
計算された指令値から生成される。
パートプログラムは通常どおりに処理される。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラム制御プログラムテストはアクティブでない。
関連性
IS "Activate program test" (DB21, ... DBX1.7)
IS "Program test selected" (DB21, ... DBX25.7)
1-506
信号が有効となる最初の SW バージョ
ン : 1.1
DB21, ...
DBX35.0
データブロック
Program status running
(プログラムステータス実行中)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号が有効となる最初の SW
バージョン : 1.1
信号ステータス 1 あるいは信号
遷移 0 ---> 1
パートプログラムは IS "NC start" でスタートしていて,実行中である。
実行中のプログラムは IS "Read-in disable"(DB21, ... DBX6.1) で停止している。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
- プログラムは M00/M01,NC 停止,あるいはモードグループ変更によって停止。
- 単一ブロックモードがセットされている場合,ブロックは処理される。
- プログラムの最後に到達する (M02/M30)
- リセットによるプログラムの強制終了
- 現在メモリ中にブロックはない(例,MDA の場合)
- 現在のブロックは処理できない
この信号は次の場合は無意味
パートプログラムが IS "NC start" でスタートしていて,実行中である場合。
例外,エラー
ワーク加工が次のイベントによって停止した場合,IS "Program status running"
は 0 に切換わらない。
- フィードディスエーブルあるいはスピンドルディスエーブルの出力
- IS "Read-in disable"(読込みディスエーブル)
- フィードレートを 0% にオーバライド
- スピンドルおよび軸監視応答
- 位置指令値が,"follow-up mode" の軸用,"servo enable" のない軸用,あるい
は "parking axes" 軸用に NC プログラムにセットされる。
関連性
IS "Read-in disable" (DB21, ... DBX6.1)
DB21, ...
DBX35.1
データブロック
Program status wait
(プログラムステータス待機)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
現在のプログラムが,NC ブロック中でプログラムコマンド WAIT_M あるい
は WAIT_E の処理中である。チャンネル用に WAIT コマンドに指定された待
機条件はまだ満足していない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラムステータス待機がアクティブでない。
参照
YS840DI ユーザーズマニュアル・プログラミング編
DB21, ...
DBX35.2
データブロック
信号が有効となる最初の SW
バージョン : 1.1
Program status stopped
(プログラムステータス停止)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
NC パートプログラムが,"NC stop","NC stop axes plus spindles","NC stop at
block limit",プログラムされた M00 または M01,あるいは単一ブロックモー
ドによって停止している。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラムステータス停止がアクティブでない。
1-507
信号が有効となる最初の SW
バージョン : 1.1
DB21, ...
DBX35.2
データブロック
関連性
DB21, ...
DBX35.3
データブロック
Program status stopped
(プログラムステータス停止)
チャンネルからの信号 (NCK ---> PLC)
IS "NC stop" (DB21, ... DBX7.3)
IS "NC stop axes plus spindles" (DB21, ... DBX7.4)
IS "NC stop at block limit" (DB21-28, DBX7.2)
Program status interrupted
(プログラムステータス中断)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
JOG の後,AUTOMATIC モードあるいは MDA モードから変更すると(プロ
グラムステータス停止がアクティブなときに),プログラムステータスが中断
に切換わる。NC スタートを実行すると,プログラムは AUTOMATIC モード
あるいは MDA モードで中断点から再開できる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラムステータス中断がアクティブでない。
例外,エラー
IS "Program status interrupted" が,NC スタート後,パートプログラムを再開で
きるということを意味している。
DB21, ...
DBX35.4
データブロック
信号が有効となる最初の SW
バージョン : 1.1
Program status aborted
(プログラムステータス強制終了)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
プログラムは選択されているが,スタートしていない。あるいは現在のプロ
グラムがリセットで強制終了している。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
プログラムステータス中断がアクティブでない。
関連性
IS "Reset" (DB21, ... DBX7.7)
DB21, ...
DBX35.5
データブロック
信号が有効となる最初の SW
バージョン : 1.1
Channel status active
(チャンネルステータスアクティブ)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
このチャンネルでは - パートプログラムが現在 AUTOMATIC あるいは MDA
で処理されている,あるいは - 少なくとも 1 つの軸が JOG モードで移動して
いる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
"Channel status interrupted" あるいは "Channel status Reset" がアクティブである。
DB21, ...
DBX35.6
データブロック
エッジ評価 : なし
信号が有効となる最初の SW バージョ
ン : 1.1
Channel status interrupted
(チャンネルステータス中断)
チャンネルからの信号 (NCK ---> PLC)
信号更新 : 周期的
1-508
信号が有効となる最初の SW
バージョン : 1.1
DB21, ...
DBX35.6
データブロック
Channel status interrupted
(チャンネルステータス中断)
チャンネルからの信号 (NCK ---> PLC)
信号ステータス 1 あるいは信号
遷移 0 ---> 1
"NC stop","NC stop axes plus spindles","NC stop at block limit",プログラムさ
れた M00 または M01,あるいは単一ブロックモードによって,AUTOMATIC
または MDA の NC プログラム,あるいは JOG の移動動作が中断している。
NC スタート後,パートプログラムあるいは中断された移動動作を再開するこ
とができる。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
"Channel status active" あるいは "Channel status Reset" がアクティブである。
DB21, ...
DBX35.7
データブロック
Channel status reset
(チャンネルステータスリセット)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号ステータス 1 あるいは信号
遷移 0 ---> 1
チャンネルがリセットに入ると直ちに信号が 1 に切換わる。つまり,処理は
行われない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
何らかの処理がチャンネル中で実行されれば,信号は 0 に切換わる。
DB21, ...
DBX36.4
データブロック
信号が有効となる最初の SW
バージョン : 1.1
たとえば,
- パートプログラムの処理
- ブロックサーチ
- TEACH IN アクティブ
- オーバーストアアクティブなど
Interrupt processing active
(割込み処理アクティブ)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 :
信号更新:
信号が有効となる最初の SW
バージョン : 4.1
信号ステータス 1 あるいは信号
遷移 0 ---> 1
割込みルーチンがアクティブであるために,モードグループ中の 1 つあるい
は複数のチャンネルが希望するオペレーティングステータスに入っていない。
割込みルーチンがプログラム動作モードで実行中の場合,この信号はセット
されない。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
すべてのチャンネルが希望のモードで動作している。
関連性
MD BAG_MASK
1-509
DB21, ...
DBB208-267
データブロック
Active G function of groups 1 to 60
(グループ 1 ~ 60 のアクティブな G ファンクション)
チャンネルからの信号 (NCK ---> PLC)
エッジ評価 : なし
信号更新 : 周期的
信号が有効となる最初の SW バージョ
ン : 1.1
信号ステータス <> 0
G ファンクションあるいは G グループのニーモニック識別子がアクティブで
ある。アクティブな G ファンクションは,その値(1 で始まる)によって決
定できる。
1 = G グループの第 1 G ファンクション
2 = G グループの第 2 G ファンクション
3 = G グループの第 3 G ファンクション
:
可能な G グループおよびそのファンクションのリストについては,プログラ
ミングガイドを参照。
信号ステータス = 0
G ファンクションあるいは G グループのニーモニック識別子がアクティブで
ない。
アプリケーション
アクティブな G グループは 2 進コードで関連するバイトに保存される。
次の値が適用される。
7 6 5 4 3 2 1 0
ビット
128 64 32 16 8 4 2 1
値
例:
G9
0 1 0
1 1 0 1 0
例外,エラー
補助ファンクションとは対照的に,G ファンクションは,PLC に出力される
際に,確認応答する必要はない。つまり,パートプログラムの処理は,G
ファンクションが出力されると直ちに再開する。
参照
YS840DI ユーザーズマニュアル・プログラミング編
1-510
1.10.6 例
■ ブロックサーチ用の拡張機能(SW 4.3 以降)
例1
ブロック終点までのブロックサーチ
アクティブなツール管理を使用したブロックサーチ後の自動ツールチェンジの例:
1. マシンデータ MD 11450: SEARCH_RUN_MODE を 1 にセットします;
マシンデータ MD 11602: ASUP_START_MASK ビット 0 = 1 (停止ステータスか
らの ASUP のスタート)をセットします
2. FB4 を介して PLC から ASUP "SUCHLAUF_ENDE" を選択します
(1.15 「基本的 PLC プログラム(P3)」を参照してください )
3. パートプログラム "WERKSTUECK_1" をロード,選択します
4. ブロック終点,ブロック番号 N220 までサーチします
5. NC 画面に "search target found" を通知します
6. アクションブロックを出力するために NC スタート
7. PLC は,PLC 信号 "Last action block active" を使用し,FC9 を介して ASUP
"SUCHLAUF_ENDE" をスタートします(1.15 「基本的 PLC プログラム(P3)
」
を参照してください)
8. ASUP 終了後(たとえば,定義される M ファンクション M90 によって評価でき
る。ブロック N1110 の例を参照してください)。PLC は "PLC action terminated"
信号をイネーブルします。これにより,アラーム 10208 が表示されます。この
時点で,オペレータによるアクションが処理されるようになります。
9. 手動オペレータアクション(JOG,JOG-REPOS,オーバライド)
10. NC スタートによりパートプログラムを再開します
ツールチェンジ点 (450,300)
アプローチ動作
目標ブロック N220
アプローチ点 (170,30)
図 1.77 ブロック終点(目標ブロック N220)までサーチするためのアプローチ動作
1-511
(注)目標ブロック N220 を使用した「輪郭までのサーチ」により,
ツールチェンジ点(目標ブロックのスタート点)で,アプ
ローチ動作を生成します。
例2
輪郭までのサーチ
アクティブなツール管理を使用したブロックサーチ後の自動ツールチェンジの例:
1. ~ 3. :
例 1 と同様
4.
輪郭へのサーチ,ブロック番号 N260
5. ~ 10. :
例 1 と同様
ツールチェンジ点 (450,300)
アプローチ動作
アプローチ点
図 1.78 輪郭(目標ブロック N260)までのサーチのためのアプローチ動作
(注)目標ブロック N260 を使用した「ブロック終点までのサーチ」
は,アラーム 14040 を発生します。(円終点エラー)
1-512
例 1 および例 2 用のパートプログラム
PROC WERKSTUECK_1
; メインプログラム
...
; ツール "FRAESER_1" を使用した輪郭セクション 1 の加工
...
...
N100 G0 G40 X200 Y200
; 工具径補正キャンセル
N110 Z100 D0
; 工具長補正キャンセル
; 輪郭セクション 1 の終了
;
; ツール "FRAESER_2" を使用した輪郭セクション 2 の加工
N200 T="FRAESER_2"
; ツールの予備選択
N210 WZW
; ツールチェンジルーチンの呼出し
N220 G0 X170 Y30 Z10 S3000 M3 D1
; アプローチブロック,輪郭セクション 2
N230 Z-5
; インフィード
N240 G1 G64 G42 F500 X150 Y50
; 輪郭の始点
N250 Y150
N260 G2 J50 X100 Y200
N270 G1 X50
N280 Y50
N290 X150
N300 G0 G40 G60 X170 Y30
; 工具径補正キャンセル
N310 Z100 D0
; 工具長補正キャンセル
; 輪郭セクション 2 の終了
...
M30
PROC WZW
; ツールチェンジルーチン
;
N500 DEF INT TNR_AKTIV
; アクティブな T 番号用の変数
N510 DEF INT TNR_VORWAHL
; 予備選択された T 番号用の変数
; T 番号
;
N520 TNR_AKTIV = $TC_MPP6[9998,1] ; アクティブなツールの T 番号を読む
N530 GETSELT(TNR_VORWAHL)
; 予備選択されたツールの T 番号 を読む
;
; ツールがまだアクティブでない場合は,ツールチェンジだけ実行する
1-513
N540 IF TNR_AKTIV == TNR_VORWAHL GOTOF ENDE
N550 G0 G40 G60 G90 SUPA X450 Y300 Z300 D0
; ツールチェンジ点
; アプローチ
N560 M6
; ツールチェンジの実行
;
ENDE: M17
PROC SUCHLAUF_ENDE SAVE
; ブロックサーチ後,ツールチェンジルーチンを呼出すための ASUP
N1000 DEF INT TNR_AKTIV
; アクティブな T 番号用の変数
N1010 DEF INT TNR_VORWAHL
; 予備選択された T 番号用の変数
N1020 DEF INT TNR_SUCHLAUF
; サーチ中に決定した T 番号の変数
N1030 TNR_AKTIV = $TC_MPP6[9998,1] ; アクティブなツールの T 番号を読む
;
N1040 TNR_SUCHLAUF = $P_TOOLNO ; サーチによって決定した T 番号を読む
N1050 GETSELT(TNR_VORWAHL)
; 予備選択されたツールの T 番号を読む
N1060 IF TNR_AKTIV ==TNR_SUCHLAUF GOTOF ASUP_ENDE
N1070 T = $TC_TP2[TNR_SUCHLAUF]
; ツール名による T 選択
N1080 WZW
; ツールチェンジルーチンの呼出し
N1090 IF TNR_VORWAHL == TNR_SUCHLAUF GOTOF ASUP_ENDE
N1100 T = $TC_TP2[TNR_VORWAHL]
; ツール名による T 選択のリストア
ASUP_ENDE:
N1110 M90
; PLC に対するチェックバック
N1120 REPOSA
; ASUP の終了
1-514
1.10.7 データフィールド,リスト
参照
本ファンクション説明で説明されていないマシンデータについては,対応する
ファンクション説明を参照欄に示しています。
一般マシンデータ
番号
識別子
名称
参照
一般事項 ($MN_ ... )
9423
MAX_SKP_LEVEL
スキップできるプログラムレベル数の定
義
10010
ASSIGN_CHAN_TO_MODE_GROUP[n]
モードグループで有効なチャンネル
[channel no.]: 0, 1
10700
PREPROCESSING_LEVEL
プログラム処理レベル
10702
IGNORE_SINGLEBLOCK_MASK
単一ブロック停止の防止
10710
PROG_SD_RESET_SAVE_TAB[n]
更新される設定データ [Index]: 0...9
11450
SEARCH_RUN_MODE
ブロックサーチ後のコントローラ応答
11600
BAG_MASK
ASUP に対するモードグループ応答
11602
ASUP_START_MASK
ASUP 用の停止条件の無視
11604
ASUP_START_PRIO_LEVEL
"ASUP_START_MASK effective" の優先
順位
11610
ASUP_EDITABLE
RET/REPOS 用のユーザ ASUP の起動
11612
ASUP_EDIT_PROTECTION_LEVEL
RET および/または REPOS 用のユーザ
別 ASUP の保護レベル
18360
EXT_PROG_BUFFER_SIZE
"Process from external memory" モードで
処理される 1 つのプログラムレベル(メ
インプログラムまたはサブプログラム)
用の再ロードメモリ(FIFO バッファ)
のサイズ
18362
EXT_PROG_NUM
"Process from external memory" モードで
同時に動作できる NCK 中のプログラム
レベルの数
1-515
3.12 (V2)
■ チャンネルマシンデータ
■ チャンネルの基本マシンデータ
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
20000
CHAN_NAME
チャンネル名
20050
AXCONF_GEOAX_ASSIGN_TAB[n]
ジオメトリ軸とチャンネル軸間の割当て
[GEO axis no.]: 0...2
1.11 (K2)
20060
AXCONF_GEOAX_NAME_TAB[n]
チャンネル中のジオメトリ軸名
[GEO axis no.]: 0...2
1.11 (K2)
20070
AXCONF_MACHAX_USED[n]
チャンネルで有効なマシン軸番号
[channel axis no.]: 0...7
1.11 (K2)
20080
AXCONF_CHANAX_NAME_TAB[n]
チャンネル中のチャンネル軸名
[channel axis no. ]: 0...7
1.11 (K2)
20090
SPIND_DEF_MASTER_SPIND
チャンネル中のマスタスピンドルの初期設定
1.17 (S1)
20100
DIAMETER_AX_DEF
トランズバース軸ファンクションを有する
ジオメトリ軸
1.14 (P1)
20114
MODESWITCH_MASK
REPOS 用の設定
20116
IGNORE_INHIBIT_ASUP
読込みディスエーブルを無視したユーザ
ASUP の完全処理
20117
IGNORE_SINGLEBLOCK_ASUP
単一ブロック処理を無視したユーザ ASUP の
完全処理
20150
GCODE_RESET_VALUES[n]
G グループの初期設定 [G group no.]: 0...59
20160
CUBIC_SPLINE_BLOCKS
C スプライン用ブロックの数
20170
COMPRESS_BLOCK_PATH_LIMIT
圧縮時の NC ブロックの最大トラバース長
20200
CHFRND_MAXNUM_DUMMY_BLOCKS
面とり/半径用のダミーブロック
20210
CUTCOM_CORNER_LIMIT
工具径補正を使用したインタセクション計算
用の最大角度
1.19 (W1)
20220
CUTCOM_MAX_DISC
DISC の場合の最大値
1.19 (W1)
20230
CUTCOM_CURVE_INSERT_LIMIT
工具径補正を使用したインタセクション計算
用の最大角度
1.19 (W1)
20240
CUTCOM_MAXNUM_CHECK_BLOCKS
工具径補正を使用した予測輪郭計算用のブ
ロック
1.19 (W1)
20250
CUTCOM_MAXNUM_DUMMY_BLOCKS
トラバース動作のないダミーブロックの
最大数
1.19 (W1)
20270
CUTTING_EDGE_DEFAULT
プログラミングを使用しないツール切削
エッジの基本設定
1.19 (W1)
20400
LOOKAH_USE_VELO_NEXT_BLOCK
プログラムされた次のブロック速度に対する
先読み
20430
LOOKAH_NUM_OVR_POINTS
先読み用のオーバライドスイッチ点の数
1.3 (B1)
20440
LOOKAH_OVR_POINTS[n]
先読みで準備されたオーバライド
速度の特性 [characteristic no.]: 0...1
1.3 (B1)
20500
CONST_VELO_MIN_TIME
定速の場合の最小時間
1.4 (B2)
20600
MAX_PATH_JERK
パス関連最大ジャーク
1.4 (B2)
20610
ADD_MOVE_ACCEL_RESERVE
オーバレイド動作用の加速予約
20650
THREAD_START_IS_HARD
スレッド切削時の軸の加速挙動
20700
REFP_NC_START_LOCK
基準点を使用しない NC スタート
ディスエーブル
1.16 (R1)
20750
ALLOW_GO_IN_G96
G96 中の G0 論理
1.18 (V1)
1-516
1.3 (B1)
番号
20800
識別子
SPF_END_TO_VDI
名称
PLC に送られるサブプログラム終了
21000
CIRCLE_ERROR_CONST
円終点監視定数
21010
CIRCLE_ERROR_FACTOR
円終点監視係数
21100
ORIENTATION_IS_EULER
方向プログラミング用の角度定義
21110
X_AXIS_IN_OLD_X_Z_PLANE
自動フレーム定義用の座標系
21200
LIFTFAST_DIST
輪郭からの急速後退用のトラバースパス
21250
START_INDEX_R_PARAM
最初のチャンネル別 R パラメータの番号
参照
1.9 (H2)
2.3 (F2)
2.11 (K2)
2.14 (S7)
■ チャンネルの補助ファンクション設定
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
22000
AUXFU_ASSIGN_GROUP[n]
補助ファンクショングループ
[aux. func. no. in channel]: 0...49
2.9 (H2)
22010
AUXFU_ASSIGN_TYPE[n]
補助ファンクションタイプ
[aux. func. no. in chan-nel]: 0...49
2.9 (H2)
22020
AUXFU_ASSIGN_EXTENSION[n]
補助ファンクション拡張
[aux. func. no. in channel]: 0...49
2.9 (H2)
22030
AUXFU_ASSIGN_VALUE[n]
補助ファンクション値
[aux. func. no. in channel]: 0...49
2.9 (H2)
22200
AUXFU_M_SYNC_TYPE
M ファンクションの出力時間
2.9 (H2)
22210
AUXFU_S_SYNC_TYPE
S ファンクションの出力時間
2.9 (H2)
22220
AUXFU_T_SYNC_TYPE
T ファンクションの出力時間
2.9 (H2)
22230
AUXFU_H_SYNC_TYPE
H ファンクションの出力時間
2.9 (H2)
22240
AUXFU_F_SYNC_TYPE
F ファンクションの出力時間
2.9 (H2)
22250
AUXFU_D_SYNC_TYPE
D ファンクションの出力時間
2.9 (H2)
22260
AUXFU_E_SYNC_TYPE
22300
AUXFU_AT_BLOCK_SEARCH_END
ブロックサーチ後の補助ファンクション出力
2.9 (H2)
22400
S_VALUES_ACTIVE_AFTER_RESET
リセット後に S ファンクションがアクティブ
2.17 (S1)
22410
F_VALUES_ACTIVE_AFTER_RESET
リセット後に F ファンクションがアクティブ
2.18 (V1)
22500
GCODE_OUTPUT_TO_PLC
PLC への G ファンクション出力
-
22510
GCODE_GROUPS_TO_PLC
ブロック変更/リセット時に NCK/PLC
インタフェースに出力される G コード
-
22550
TOOL_CHANGE_MODE
Mファンクション用の新規ツールオフセット
2.19 (W1)
22560
TOOL_CHANGE_M_CODE
ツールチェンジ用の M ファンクション
2.19 (W1)
(近日使用可)E ファンクションの出力時間
1-517
-
■ チャンネル中の変換の定義
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
24100
TRAFO_TYPE_1
チャンネル中での変換 1 の定義
2.3 (F2)
24110
TRAFO_AXES_IN_1[n]
変換用の軸割当て [axis index]: 0...7
2.3 (F2)
24120
TRAFO_GEOAX_ASSIGN_TAB_1[n]
変換 1 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24200
TRAFO_TYPE_2
チャンネル中での変換 2 の定義
2.3 (F2)
24210
TRAFO_AXES_IN_2[n]
変換 2 用の軸割当て [axis index]: 0...7
2.3 (F2)
24220
TRAFO_GEOAX_ASSIGN_TAB_2[n]
変換 2 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24300
TRAFO_TYPE_3
チャンネル中での変換 3 の定義
2.3 (F2)
24310
TRAFO_AXES_IN_3[n]
変換 3 用の軸割当て [axis index]: 0...7
2.3 (F2)
24320
TRAFO_GEOAX_ASSIGN_TAB_3[n]
変換 3 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24400
TRAFO_TYPE_4
チャンネル中での変換 4 の定義
2.3 (F2)
24410
TRAFO_AXES_IN_4[n]
変換 4 用の軸割当て [axis index]: 0...7
2.3 (F2)
24420
TRAFO_GEOAX_ASSIGN_TAB_4[n]
変換 4 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24430
TRAFO_TYPE_5
チャンネル中での変換 5 の定義
2.3 (F2)
24432
TRAFO_AXES_IN_5[n]
変換 5 用の軸割当て [axis index]: 0...7
2.3 (F2)
24434
TRAFO_GEOAX_ASSIGN_TAB_5[n]
変換 5 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24440
TRAFO_TYPE_6
チャンネル中での変換 6 の定義
2.3 (F2)
24442
TRAFO_AXES_IN_6[n]
変換 6 用の軸割当て [axis index]: 0...7
2.3 (F2)
24444
TRAFO_GEOAX_ASSIGN_TAB_6[n]
変換 6 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24450
TRAFO_TYPE_7
チャンネル中での変換 7 の定義
2.3 (F2)
24452
TRAFO_AXES_IN_7[n]
変換 7 用の軸割当て [axis index]: 0...7
2.3 (F2)
24454
TRAFO_GEOAX_ASSIGN_TAB_7[n]
変換 7 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24460
TRAFO_TYPE_8
チャンネル中での変換 8 の定義
2.3 (F2)
24462
TRAFO_AXES_IN_8[n]
変換 8 用の軸割当て [axis index]: 0...7
2.3 (F2)
24464
TRAFO_GEOAX_ASSIGN_TAB_8[n]
変換 8 用の GEO 軸とチャンネル軸間の割当
て [GEO axis no.]: 0...2
2.3 (F2),
2.7(M1)
24500
TRAFO5_PART_OFFSET_1[n]
5 軸変換 1 のオフセットベクトル
[axis no.]: 0...2
2.3 (F2)
24510
TRAFO5_ROT_AX_OFFSET_1[n]
5 軸変換 1 用の回転軸 1/2 の位置オフセット
[axis no.]: 0...1
2.3 (F2)
24520
TRAFO5_ROT_SIGN_IS_PLUS_1[n]
5 軸変換 1 用の回転軸 1/2 の符号
[axis no.]: 0...1
2.3 (F2)
24530
TRAFO5_NON_POLE_LIMIT_1
5 軸変換 1 の極リミットの定義
2.3 (F2)
24540
TRAFO5_POLE_LIMIT_1
5 軸補間 1 用補間の極終点角度の公差
2.3 (F2)
24550
TRAFO5_BASE_TOOL_1[n]
5 軸変換 1 を起動するベースツールのベクト
ル [axis no.]: 0...2
2.3 (F2)
24560
TRAFO5_JOINT_OFFSET_1[n]
5 軸変換 1 用のキネマティックスオフセット
のベクトル [axis no.]: 0...2
2.3 (F2)
1-518
番号
24600
識別子
TRAFO5_PART_OFFSET_2[n]
名称
24610
TRAFO5_ROT_AX_OFFSET_2[n]
5 軸変換 2 用の回転軸 1/2 の位置オフセット
[axis no.]: 0...1
2.3 (F2)
24620
TRAFO5_ROT_SIGN_IS_PLUS_2[n]
5 軸変換 2 用の回転軸 1/2 の符号
[axis no.]: 0...1
2.3 (F2)
24630
TRAFO5_NON_POLE_LIMIT_2
5 軸変換 2 の極リミットの定義
2.3 (F2)
24640
TRAFO5_POLE_LIMIT_2
5 軸補間 2 用補間の極終点角度の公差
2.3 (F2)
24650
TRAFO5_BASE_TOOL_2[n]
5 軸変換 2 を起動するベースツールの
ベクトル [axis no.]: 0...2
2.3 (F2)
24660
TRAFO5_JOINT_OFFSET_2[n]
5 軸変換 2 用のキネマティックスオフセット
のベクトル [axis no.]: 0...2
2.3 (F2)
5 軸変換 2 のオフセットベクトル
[axis no.]: 0...2
参照
2.3 (F2)
■ チャンネル別メモリ設定
番号
識別子
名称
参照
チャンネル別 ($MC_ ... )
25000
REORG_LOG_LIMIT
ログファイルイネーブル用の IPO バッファ
のパーセント
2.14 (S7)
28000
MM_REORG_LOG_FILE_MEM
REORG 用のメモリサイズ (DRAM)
2.14 (S7)
28010
MM_NUM_REORG_LUD_MODULES
REORG 用ローカルユーザ変数のブロックの
数 (DRAM)
2.14 (S7)
28020
MM_NUM_LUD_NAMES_TOTAL
ローカルユーザ変数の数 (DRAM)
2.14 (S7)
28030
MM_NUM_LUD_NAMES_PER_PROG
1 プログラム当たりのローカルユーザ変数の
数 (DRAM)
2.14 (S7)
28040
MM_LUD_VALUES_MEM
28050
MM_NUM_R_PARAM
チャンネル別 R パラメータの数 (SRAM)
2.14 (S7)
28060
MM_IPO_BUFFER_SIZE
IPO バッファ中の NC ブロックの数 (DRAM)
2.14 (S7)
28070
MM_NUM_BLOCKS_IN_PREP
28080
MM_NUM_USER_FRAMES
セット可能なフレームの数 (SRAM)
2.14 (S7)
28090
MM_NUM_CC_BLOCK_ELEMENTS
コンパイルサイクル用ブロック要素の数
(DRAM)
2.14 (S7)
28100
MM_NUM_CC_BLOCK_USER_MEM
コンパイルサイクル用ブロックメモリの
サイズ (DRAM)
2.14 (S7)
28500
MM_PREP_TASK_STACK_SIZE
準備タスクのスタックサイズ (DRAM)
2.14 (S7)
28510
MM_IPO_TASK_STACK_SIZE
IPO タスクのスタックサイズ (DRAM)
2.14 (S7)
(近日使用可)ローカルユーザ変数用の
メモリサイズ (DRAM)
(近日使用可)ブロック準備用のブロックの
数 (DRAM)
1-519
-
-
■ 軸/スピンドル別マシンデータ
番号
識別子
名称
参照
軸/チャンネル別 ($MA_ ... )
30550
AXCONF_ASSIGN_MASTER_CHAN
軸交換用のチャンネル位置のリセット
30600
FIX_POINT_POS
G75 を使用した軸の固定値位置
33100
COMPRESS_POS_TOL
圧縮時の最大ずれ
2.6 (K5)
■ チャンネル別設定データ
番号
識別子
名称
参照
チャンネル別 ($SC_ ... )
42000
THREAD_START_ANGLE
スレッド用のスタート角度
2.18 (V1)
42010
THREAD_RAMP_DISP
スレッド切削時のフィード軸のスタートお
よび減速距離
2.18 (V1)
42100
DRY_RUN_FEED
ドライランフィード
2.18 (V1)
42700
EXT_PROG_PATH
サブプログラムコール EXTCALL 用の外部
プログラムパスの名称
■ インタフェース信号
以下の表では,インタフェース信号あるいはインタフェース信号のグループをど
こで説明しているかを示しています。1.10.5 「信号の説明」で詳しく説明している
信号や,説明を必要としない信号には参照はありません。
すべてのインタフェース信号の完全なリストについては,次を参照してください。
参照: パラメータ一覧
■ アナログ入力および出力
DB 番号
バイト,ビット
名称
参照
NCK への一般信号
10
DBX56.1
EMERGENCY STOP (非常停止)
1-520
1.13 (N2)
■ DB11, ... モードグループ信号
インタフェース信号の説明
PLC → NCK のモードグループ DB 信号については,本ファンクション説明の
1.10.5 「■信号の説明」で説明しています。
NCK → PLC のモードグループ DB 信号については,本ファンクション説明の
1.10.6 「■例」で説明しています。
DB 番号
バイト,ビット
名称
PLC から NCK へ
11
11
11
11
11
11
DBX0.0
AUTOMATIC モード
DBX0.1
MDA モード
DBX0.2
JOG モード
DBX0.4
モードグループ切換えディスエーブル
DBX0.5
モードグループ停止
DBX0.6
モードグループ停止軸プラススピンドル
DBX0.7
モードグループリセット
DBX1.0
教示マシンファンクション
DBX1.1
REPOS マシンファンクション
DBX1.2
REF マシンファンクション
DBX4.0
AUTOMATIC モード選択
DBX4.1
MDA モード選択
DBX4.2
JOG モード選択
DBX5.0
教示マシンファンクション選択
DBX5.1
REPOS マシンファンクション選択
DBX5.2
REF マシンファンクション選択
DBX6.0
AUTOMATIC モードアクティブ
DBX6.1
MDA モードアクティブ
DBX6.2
JOG モードアクティブ
DBX6.3
モードグループレディ
DBX6.7
リセットステータスの全チャンネル
DBX7.0
教示マシンファンクションアクティブ
DBX7.1
REPOS マシンファンクションアクティブ
DBX7.2
REF アクティブマシンファンクション
1-521
参照
■ DB21, ... チャンネル信号
DB 番号
バイト,ビット
チャンネルへ
DBX0.3
21
名称
参照
2.4 (H1)
DRF の起動
DBX0.4
単一ブロックの起動
DBX0.5
M01 の起動
DBX0.6
ドライランフィードの起動
1.18 (V1)
DBX1.0
基準化の起動
1.16 (R1)
DBX1.6
PLC アクション終了
DBX1.7
プログラムテストの起動
21
DBX2.0
スキップブロック
21
DBX7.0
NC スタートディスエーブル
DBX7.1
NC スタート
DBX7.2
ブロックリミットでの NC 停止
DBX7.3
NC 停止
DBX7.4
NC 停止軸プラススピンドル
DBX7.7
リセット
21
チャンネルから
DBX24.3
21
2.4 (H1)
DRF 選択
DBX24.4
単一ブロック選択
DBX24.5
M01 選択
DBX24.6
ドライランフィードレート選択
1.18 (V1)
DBX25.3
選択された急速トラバースのフィードオーバライド
1.18 (V1)
DBX25.7
プログラムテスト選択
21
DBX26.0
スキップブロック選択
21
DBX32.3
アクションブロックアクティブ
DBX32.4
アプローチブロックアクティブ
DBX32.5
M00/M01 アクティブ
DBX32.6
最後のアクションブロックアクティブ
DBX33.0
基準化アクティブ
DBX33.4
ブロックサーチアクティブ
DBX33.5
M02/M30 アクティブ
DBX33.6
変換アクティブ
DBX33.7
プログラムテストアクティブ
DBX35.0
プログラムステータス:実行中
DBX35.1
プログラムステータス:待機
DBX35.2
プログラムステータス:停止
BX35.3
プログラムステータス:中断
DBX35.4
プログラムステータス:強制終了
DBX35.5
チャンネルステータス:アクティブ
DBX35.6
チャンネルステータス:中断
DBX35.7
チャンネルステータス:リセット
DBB 208
G ファンクショングループ 1 のアクティブな G ファンクションの
番号(2 進)
21
21
21
21
21
1.16 (R1)
1-522
DB 番号
バイト,ビット
名称
21
DBB 209
G ファンクショングループ 2 のアクティブな G ファンクションの
番号(2 進)
21
DBB 210
G ファンクショングループ 3 のアクティブな G ファンクションの
番号(2 進)
21
DBB ...
G ファンクショングループ ... のアクティブな G ファンクションの
番号(2 進)
21
DBB266
G ファンクショングループ n-1 のアクティブな G ファンクション
の番号(2 進)
21
DBB 208
G ファンクショングループ n のアクティブな G ファンクションの
番号(2 進)
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいは YS840DI システムを有するシステムのオンラインヘルプ
1-523
参照
1-524
1.11 軸構成及び座標系(K2)
1.11.1 概略説明
■軸
マシン軸
マシン軸とは工作機械上に実在する軸です。
チャンネル軸
すべてのジオメトリ軸とすべての特殊軸が 1 つのチャンネルに割当てられます(1
つのチャンネル軸に割当てられます)。ジオメトリ軸と追加された軸は常に「自分
の」チャンネル内で移動します。
ジオメトリ軸
3 つのジオメトリ軸が常に仮想の直交座標系,つまり基本座標系 (BCS) を構成しま
す。FRAMES (オフセット,回転,スケーリング,ミラーリング)を用いると,
BCS 上にワーク座標系のジオメトリ軸を描くことができます。
特殊軸
ジオメトリ軸とは異なって,特殊軸間にはジオメトリカルな関係はありません。
パス軸
パス軸は互いに補間されます(チャンネルのすべてのパス軸は共通のパス補間を
有します)。各チャンネルのすべてのパス軸は同じ加速フェーズ,定移動フェーズ
と減速フェーズを有します。
位置決め軸
位置決め軸は別々に補間されます(各位置決め軸は各々の軸補間を有していま
す)。各位置決め軸は各々のフィードレートと減速特性を有しています。
同期軸
同期軸はパス軸と補間されています。(1 つのチャンネルのすべてのパス軸とすべ
ての同期軸は 1 つの共通のパス補間を有しています。)チャンネルのすべてのパス
軸とすべての同期軸は同一の加速フェーズ,定移動フェーズ,減速フェーズを有
しています。
1-525
軸構成
ジオメトリ軸,特殊軸,チャンネル軸,マシン軸間の各割当てとそれぞれの軸タ
イプの名称は以下のマシンデータで定義されます。
MD 20050 AXCONF_GEOAX_ASIGN_TAB
MD 20060 AXCONF_GEOAX_NAME_TAB
MD 20070 AXCONF_MACHAX_USED
MD 20080 AXCONF_CHANAX_NAME_TAB
MD 10000 AXCONF_MACHAX_NAME_TAB
MD 35000 SPIND_ASSIGN_TO_MACHAX
交換可能なジオメトリ軸
「交換可能なジオメトリ軸」機能を使用すると,あるグループ中のジオメトリ軸を
他のチャンネル軸と交換できます。
チャンネル中で同期特殊軸として構成された軸は,プログラムコマンドに応じて
任意のジオメトリ軸に取って代わることができます。
リンク軸 (SW 5 以降 )
リンク軸は他の NCU と物理的に接続され,位置制御装置により制御されます。リ
ンク軸は他の NCU のチャンネルに動的に割当てられます。リンク軸は特定の
NCU から見た場合はローカル軸ではありません。
軸コンテナのコンセプトは NCU への割当ての動的変更に用いられます。パートプ
ログラムの GET と RESET による軸交換は NCU 境界をまたがるリンク軸には使用
できません。
軸コンテナ (SW 5 以降 )
軸コンテナは環状バッファデータ構造です。ローカル軸および(または)リンク
軸は軸コンテナ中でチャンネルに割当てられます。環状バッファ内での入力は周
期的にシフトできます。
論理マシン軸イメージ中のリンク軸構成は,ローカル軸またはリンク軸への直接
リファレンスに加えて,軸コンテナへのリファレンスも可能にします。そのよう
なリファレンスは以下から成ります。
• 軸コンテナ番号
• スロット(対応するコンテナ内の環状バッファロケーション)
環状バッファロケーション内のエントリは次のとおりです。
• ローカル軸
• リンク軸
1-526
■ 座標系
マシン座標系
マシン座標系 (MCS) には以下の特性があります。
• マシン軸により定義されています。
• マシン軸は直交座標系を形成するために互いに直角に交わるように構成するこ
とができます。
• マシン軸の名称を定義することができます。
• マシン軸は直線軸にも回転軸にもできます。
基本座標系
基本座標系 (BCS) には以下の特性があります。
• ジオメトリ軸は直交座標系を形成します。
• BCS は MCS のキネマティックス変換から得られます。
基本原点系
基本原点系(BZS)は基本オフセットを有する基本座標系です。
設定可能な原点系
設定可能な原点系 (SZS) はプログラム可能なフレームを持たないワーク座標系です。
ワーク原点は設定可能なフレーム G54 ~ G599 により定義されます。
ワーク座標系
ワーク座標系 (WCS) には以下の特性があります :
• ワーク座標系においては,すべての軸がプログラムされます(パートプログラ
ム)
。
• ワーク座標系はジオメトリ軸と特殊軸から構成されます。
• ジオメトリ軸は常に直交座標系を形成します。
• 特殊軸は特殊軸間でジオメトリカルな関係をもたない座標系を形成します。
• ジオメトリ軸と特殊軸の名称を定義することができます。
• FRAMES (TRANS, ROT, SCALE, MIRROR) を用いて,ワーク座標系を変換,回転,
スケーリング,ミラーリングできます。複数の変換や回転移動も可能です。
1-527
外部原点オフセット
外部原点オフセットには以下の特性があります。
• PLC で定義された時に,基本座標系とワーク座標系の間の,あらかじめ定義さ
れた追加された原点オフセットが起動します。
• オフセットの大きさは関与する軸ごとに以下により設定できます。
- PLC
- 操作パネル
- パートプログラム
• 関連した軸のモーションブロックがオフセット起動後に最初に処理された時
に,そのオフセットは有効になります。そのオフセットがプログラムされたパ
ス(無補間)上に重ねられます。外部原点オフセットがシフトされる速度は次
のとおりです :
プログラムされた F 値 プラス 1/2 JOG 速度。外部原点オフセットは G0 ブロッ
クの終わりに移動されます。
• 起動したオフセットは RESET ならびにプログラムエンド後も保持されます。
• 電源オン後も,アクティブな最後のオフセットが制御装置に保存されますが,
PLC で再起動する必要があります。
1-528
■ フレーム
スケーリング
ミラーリング
回転
オフセット(微)
オフセット(粗)
図 1.79 フレーム要素
FRAME(フレーム)とは,ある直交座標系を別の直交座標系に変換するときの計
算則です。
FRAME は以下の要素で構成されます。
• 変換
→ TRANS, ATRANS, G58 und G59 によりプログラムされる
• 回転
→ ROT および AROT によりプログラムされる
• スケーリング
→ SCALE および ASCALE によりプログラムされる
• ミラーリング
→ MIRROR および AMIRROR によりプログラムされる
変換,スケーリング,ミラーリングはジオメトリ軸と特殊軸に対してプログラム
することができます。ジオメトリ軸のみが回転に関してプログラムすることができ
ます(直交座標系の形成において,ジオメトリカルな関係がジオメトリ軸にはあ
ります)
。
■ NCU グローバルフレーム (SW 5 以降 )
ロータリインデックスマシン技術については,たとえば,1 つのチャンネルから別
の複数のチャンネル用にフレームを初期化する必要があります。これらのクロス
チャンネルフレームは以降は「 NCU グローバルフレーム」と呼びます。NCU グ
ローバルフレームはすべてのチャンネルから読取ったり,書込んだり,起動した
りできます。最大 8 つの NCU グローバル基本フレームを利用できます。
チャンネル別あるいは NCU 全体(グローバルフレーム)の設定可能なフレームを
定義することができます。グローバルフレームは,チャンネル軸やマシン軸にオ
フセット,スケールファクター,ミラーリング操作を適用するのに用いることが
できます。
すべての基本フレーム(8 つのグローバルフレームと 8 つのチャンネル別フレー
ム)が連結して完全な基本フレームが形成されます。
1-529
チャンネル協調
NCU グローバルフレームの場合,フレームがプログラム中の希望する点で計算さ
れるようにするため,ユーザはチャンネル協調とフレームの起動を確認する必要
があります(たとえば,WAITMC コマンドを用いて )。
フレームのクロスチャンネル起動はサポートされていません。
G58, G59 (SW5 以降 )
G58 と G59 はプログラム可能なフレーム要素の軸代用に使用できます。変換要素
は内部的にさらに絶対要素と相対要素に分けられます。各要素は新しいプログラム
コマンドで変更できます。これらの機能はオフセット(微)が構成される場合に
のみ用いられます。
G91 を有するフレーム (SW 4 以降 )
G91 での相対寸法プログラミングは,原点オフセットが選択されたときに,プロ
グラムされた相対値に追加してオフセット値が移動されるように定義されます。
設定データ SD 42440: FRAME_OFFSET_INCR_PROG は以下を設定するために用い
られます。
• Value = 1
原点オフセットは FRAME と軸の相対プログラミングを使用して移動されます
(= 初期設定 )
• Value = 0
プログラムされたパスのみが移動されます。
ミラーリング (SW 5 以降 )
MD10610 MIRROR_REF_AX はミラーリングが行われる軸を定義するのに使用します。
MD10610 = 0:
ミラーリングはプログラムされた軸を基準にして行わ
れます。
MD10610 = 1 または 2 または 3:
入力値に従って,ミラーリングは特定の基準軸のミ
ラーリングに対して,および他の 2 つのジオメトリ軸
の回転に対してマッピングされます。
MIRROR(ミラー)
現在のミラープログラミングはミラートグルをサポートしています。ミラートグ
ルとは,プログラムされた値に関係なく,軸が常にミラーリングされることを意
味します。ミラーリングはプログラムされた値が評価されるようなミラーリング
をもサポートしています。
値が 0 でない場合,ミラーリングは常にアクティブです。
値が 0 の場合,ミラーリングは常に非アクティブです。
1-530
■ ワークに関連する実際値系
定義
「ワークに関連する実際値系」とは,以下のことをユーザが行えるようにする 1 連
の機能を意味します。
• 電源オン後にマシンデータに定義されたワーク座標系を :
- オペレータが介入することなく,
- JOG および AUTOMATIC モードで使用できるようにすること。
• プログラムエンド後も次のパートプログラムに備えて以下の設定を有効なまま
にしておくこと :
- アクティブな平面
- 設定可能なフレーム (G54-G57)
- キネマティックス変換
- アクティブツール長補正
• MMC でオペレータが次を切換えられるようにすること :
- ワーク座標系
- マシン座標系
• オペレータがワーク座標系を変更すること ( たとえば,設定可能なフレームま
たはツール長補正を変更すること )。
これらのオプションのいくつかはすでに製品バージョン 1 で組込み済みです。次
のセクションで製品バージョン 2 に組込まれているすべての機能性を詳しく説明
します。
1-531
1.11.2 詳細説明
■軸
特殊軸
ジオメトリ軸
チャンネル軸
パス軸
フィードレート
を定義するパス軸
FGROUP ( )
同期軸
位置決め軸
スピンドル軸
コマンド軸
ガントリ軸
往復軸
PLC 軸
カップリングモーション軸
ガイド値カップリング軸
キネマティックス
変換
マシン軸
図 1.80 軸タイプ間の関係
マシン軸
ローカルマシン軸
リンク軸 (NCU リンクを介して )
図 1.81 ローカル軸とリンク軸
1-532
■ マシン軸
定義
マシン軸は工作機械に実際に存在する軸です。
図 1.82 直交座標マシンのマシン軸 X, Y, Z, B, S
アプリケーション
以下はマシン軸になることができます。
• ジオメトリ軸 X, Y, Z
• オリエンテーション軸 A, B, C
• ローダ軸
• ツールタレット
• ツールマガジン軸
• 自動ツールチェンジャ軸
• スピンドルスリーブ
• パレットチェンジャ用軸
• その他
1-533
■ チャンネル軸
定義
各ジオメトリ軸ならびに各特殊軸がチャンネルに割当てられます。ジオメトリ軸な
らびに追加された軸は常に「それぞれの」チャンネル内で 移動されます。
■ ジオメトリ軸
定義
3 つのジオメトリ軸が常に仮想の直交座標系を構成します。FRAMES ( オフセッ
ト,回転,スケーリング,ミラーリング ) を用いることにより,BCS によりワーク
座標系 (WCS) のジオメトリ軸をイメージすることができます。
アプリケーション
ジオメトリ軸はワークジオメトリ(輪郭機能)をプログラムするために用いられ
ます。平面選択 G17, G18 ならび G19 (DIN 66217) は常に 3 つのジオメトリ軸を基
準にします。このため,3 つのジオメトリ軸を X,Y,Z と名づけると便利です。
■ 交換可能なジオメトリ軸
定義
パートプログラムから,「交換可能なジオメトリ軸」機能を用いて他のチャンネル
軸からジオメトリ軸グループを構成することができます。
チャンネル内で同期軸のように初めに設定される軸はプログラムコマンドを使用
することによって任意の軸と交換できます。
例
Z1 と Z2 の 2 つの Z 軸を有するマシンでは,Z1 あるいは Z2 をパートプログラムの
インストラクションに応じて,ジオメトリ軸としてプログラムできます。
起動
軸交換はプログラムコマンドにより起動されます。
GEOAX([n, channel axis name]...)
n=0:
ジオメトリ軸グループから軸を削除
n=1, 2, 3:
ジオメトリ軸のインデックス
GEOAX( ):
ジオメトリ軸にチャンネル軸を割当てるために,MD
を介して定義された基本設定を指定
チャンネル軸名 :
ジオメトリ軸として動作するチャンネル軸の名称
ジオメトリ軸に指定されたチャンネル軸のみがそのジオメトリ軸名称にアドレス
されます。ジオメトリ軸名称それ自体は変わりません。
ジオメトリ軸は1つのコマンドで個々にまたはグループとして交換されます。
1-534
補足条件
原則として,ジオメトリ軸に指定されたチャンネル軸は他のチャンネル軸と交換
できます。この場合,次の制約条件が適用されます。
• 回転軸はジオメトリ軸としてプログラムしてはなりません。
• チャンネル軸として同じ名称ををもつジオメトリ軸は別のチャンネル軸と交換
することはできません ( アラームメッセージ )。このタイプの軸はジオメトリ軸
グループから削除することもできません。ジオメトリ軸グループ内で位置を変
えることもできません。
• 交換オペレーションに関わるそれぞれの軸ペアはブロック同期化する必要があ
ります。
• ジオメトリ軸が交換される場合,次の機能はアクティブにできません。
- 変換
- スプライン補間
- ツール半径補正
- 工具長補正
• アクティブ DRF オフセットまたは外部原点オフセットは依然として有効です。
これらのオフセットはチャンネル軸上で動作します。チャンネル軸の割当ては
ジオメトリ軸の交換に影響されません。
ジオメトリ軸の交換
すべてのフレーム,保護ゾーンならびにワーキングエリア制限は削除されます。
それらは交換作業後に再プログラムする必要があります。
それゆえ,ジオメトリ軸の交換に対するシステム応答は,キネマティックス変換
における変化(スイッチオン / オフ,切替え)に対する応答と同じになります。
工具長補正
アクティブ工具長補正はそのまま有効で交換後の新しいジオメトリ軸に適用され
ます。
以下の工具長補正はすべてのジオメトリ軸にまだ適用されていないと見なされま
す。
• ジオメトリ軸に新たに加えられた軸
• ジオメトリ軸内でそれら自体の位置を変えた軸
交換作業後にその位置をジオメトリ軸グループ内に保持するジオメトリ軸は工具
長補正に関しても,その状態を保持します。
1-535
リセット
MD 20110: RESET_MODE_MASK
ビット 12:
変更されたジオメトリ軸割当てのリセット動作
ビット 12 = 0
マシンデータ $MC_GEOAX_CHANGE_RESET がイネーブル
されると,変更されたジオメトリ軸割当ては,リセットまた
はパートプログラムエンドで消去されます。ジオメトリ軸割
当てに定義された基本設定が有効になります。
ビット 12 = 1
変更されたジオメトリ軸割当てはリセット/パートプログラ
ム後も有効です。
MD 20118: GEOAX_CHANGE_RESET
FALSE:
現在のジオメトリ軸の構成はリセットならびにプログラムス
タートにより変わることはありません。この設定の場合,そ
の応答はジオメトリ軸交換のない古いバージョンのソフト
ウェアに一致します。
TRUE:
ジオメトリ軸の構成は変化しないか,またはリセット時,
パートプログラムエンド時(マシンデータ
$MC_RESET_MODE_MASK に従う),あるいはパートプログ
ラムスタート時(マシンデータ $MC_START_MODE_MASK
に従う)に,マシンデータ AXCONF_GEOAX_ASSIGN_TAB
で定義された基本状態に切替えられます。
プログラムスタート
リセット応答に類似しており,スタート時の動作は MD 20112:
START_MODE_MASK により決定されます。
MD 20112: START_MODE_MASK
ビット 12:
変更されたジオメトリ軸割当ての挙動
ビット 12 = 0
変更されたジオメトリ軸の割当てはパートプログラムスター
トにおいても有効です。
ビット 12 = 1
変更されたジオメトリ軸の割当てはパートプログラムにおい
て削除されます。
基準点アプローチ
「基準点アプローチ」モードが選択されると,マシンデータにより定義されたジオ
メトリ軸構成は自動的に設定されます。
1-536
M コード
PLC は,ジオメトリ軸の交換を MD 22532:GEOAX_CHANGE_M_CODE に設定さ
れている M コードのオプション出力を経て GEOAX( ) により通知されます。
(注)このマシンデータが 0 ~ 6,17, 30 のいずれかの値に設定され
ると,M コードは出力されません。
変換変更
キネマティックス変換ならびにジオメトリ軸交換については,次のような相互関
係があります。
• 変換がアクティブである場合,ジオメトリ軸割当ては変更できません。
• 変換の起動は,プログラムされたジオメトリ軸構成を削除し,それを起動した変
換のマシンデータ内に保存されたジオメトリ軸割当てにより交換します。
• 変換がアクティブでない場合,ジオメトリ軸構成に対して MD で定義された基
本設定が再び有効になります。
変換にともなってジオメトリ軸の変更が必要であれば,そのときは別の新しい変
換を設定する必要があります。
この目的のために,そのチャンネル内に全部で 8 つの同時に利用できる変換があ
ります。最大 2 つの変換が次の変換グループのチャンネルごとに同時に利用でき
ます。
• 方向変換 (3 軸 , 4 軸 , 5 軸 ならびにニューテーション変換 )
• TRAANG ( 傾斜軸 )
• TRANSMIT
• TRACYL
参照: 3.1 3 ~ 5 軸刃先方向制御(F2)
2.7 座標変換機能(M1)
1-537
例
次の例では,チャンネル名 XX, YY, ZZ, U, V, W をもつ 6 つのチャンネル軸ならび
に軸名 X, Y, Z をもつ 3 つのジオメトリ軸があると仮定します。基本設定はジオメ
トリ軸が最初の 3 つのチャンネル軸,すなわち,XX, YY , ZZ 上にイメージされる
ようにマシンデータに定義されます。
GEOAX( )
MD AXCONF_GEOAX_ASSIGN_TAB を介して定義さ
れたジオメトリ軸すなわち,XX, YY , ZZ がジオメト
リ軸になります。
G0 X0 Y0 Z0 U0 V0 W0
急速移動ですべての軸を位置 0 まで移動させる
GEOAX(1, U, 2, V, 3, W)
チャンネル軸 U が 1 番目のジオメトリ軸,V が 2 番
目,W が 3 番目になります。
GEOAX(1, XX, 3, ZZ)
チャンネル軸 XX が 1 番目のジオメトリ軸,ZZ が 3 番
目になります。2 番目のジオメトリ軸は変化しません。
G17 G2 X20 I10 F1000
X-Y 平面中の半円。チャンネル軸 XX ならびに V は移
動します。
GEOAX(2, W)
チャンネル軸 W は2番目のジオメトリ軸になります。
1番目と2番目のジオメトリ軸は変化しません。
G17 G2 X20 I10 F1000
X-Y 平面中の真円。チャンネル軸 XX ならびに W は
移動します。
GEOAX( )
MD AXCONF_GEOAX_ASSIGN_TAB を介して定義さ
れたジオメトリ軸割当てが有効になります。すなわ
ち,XX, YY, ZZ がジオメトリ軸に成ります。
GEOAX(1, U, 2, V, 3, W)
U, V , W がそれぞれ第 1, 第 2, 第 3 のジオメトリ軸にな
ります。
G1 X10 Y10 Z10 XX=25
チャンネル軸 U, V, W それぞれが位置 10 に移動しま
す。XX は位置 25 に移動します。
GEOAX(0, V)
V はジオメトリ軸グループから削除されます。U およ
び W はジオメトリ軸としてアクティブなままです。2
番目のジオメトリ軸はもう割当てられていません。
GEOAX(1, U, 2, V, 3, W)
U, V, W はそれぞれ第 1,第 2,第 3 ジオメトリ軸にな
ります。つまり,U および W は変化しません。
GEOAX(3, V)
V は 3 番目のジオメトリ軸になります。結果,前に 3
番目であったジオメトリ軸 W はジオメトリ軸から削
除されます。2 番目のジオメトリ軸はもう割当てられ
ていません。
1-538
■ 特殊軸
定義
ジオメトリ軸とは異なり,特殊軸間にはジオメトリカルな関係は定義されません。
(注)ジオメトリ軸同士は,直交座標系として正確に定義された関
係を有しています。
ジオメトリ軸同士は,直交座標系として正確に定義された関係を有しています。
特殊軸は基本座標系の重要部分です。FRAMES ( 変換,スケーリング,ミラーリン
グ ) を用いる場合,ワーク座標系の特殊軸は基本座標系にマップされます。
用途
代表的な特殊軸を以下に示します。
• 回転軸
• 工作機械軸
• ツール回転軸
• ローダ軸
■ パス軸
定義
パス軸同士は一緒に補間されます ( チャンネルのすべてのパス軸は共通のパス補間
を有します )。1つのチャンネルのすべてのパス軸は同一の加速フェーズ,定移動
フェーズ,減速フェーズを有します。アドレス F (パスフィードレート)でプログ
ラムされたフィードレートはブロック内でプログラムされたすべてのパス軸に適
用されます。以下の例外があります。
• インストラクション FGROUP を用いてパス速度を制御しないものとして定義
された軸がプログラムされました。→ 「同期軸」の項を参照してください。
• インストラクション POS または POSA でプログラムされた軸は個々のフィード
レート設定を有します。( 軸補間 ) → 「位置決め軸」の項を参照してください。
アプリケーション
パス軸はプログラムされた輪郭機能を有するワークを作るために用いられます。
1-539
■ 位置決め軸
定義
位置決め軸は別々に保管されます(各々の位置決め軸はそれぞれの軸補間を有し
ます)
。各々の位置決め軸はそれぞれフィードレートならびに加速特性を有しま
す。位置決め軸はパス軸に加えてプログラムすることができます(たとえ同一の
ブロック内であっても)。パス軸補間(パス補間)は位置決め軸による影響を受け
ることはありません。パス軸と個々の位置決め軸が同時にそれらのブロックエン
ドポイントに到達する必要はありません。インストラクション POS ならびに POSA
は位置決め軸のプログラムならびにブロックチェンジ標準の定義に用いられます。
• POS:
ブロックチェンジはパス軸がそれらのブロックエンドポイント
に到達したときに起こります。
• POSA:
ブロックチェンジはパス軸がそれらのブロックエンドポイント
に到達したときに起こります。位置決め軸はブロックリミット
を越えてそれらのブロックエンドポイントまで移動し続けま
す。
現在の位置決め軸は以下の点で,位置決め軸と異なります。
• PLC からそれらのブロックエンドポイントを受けるのみです。
• いつでも開始できます。
• 現在のパートプラグラムの処理に影響しません。
アプリケーション
以下は位置決め軸の代表的なアプリケーションです。
• ワークローディング用ローダ
• ワークローディング用ローダ
• ツールマガジン / タレット
参照: 2.10 補助位置決め軸(P2)
1.17 主軸機能(S1)
3.2 ガントリ軸制御(G1)
3.5 位置同期制御と ESR(M3)
1.15 基本的 PLC プログラム(P3)
2.11 振動機能(P5)
1-540
■ 同期軸
定義
同期軸はツールパス速度を計算するために参照されないパス軸の構成要素です。そ
れらはパス軸により一緒に補間されます(1つのチャンネル内のすべてのパス軸
と同期軸は共通のパス補間を有します)。チャンネルのすべてのパス軸とすべての
同期軸は同一の加速フェーズ,定移動フェーズならびに減速フェーズを有します。
アドレス F によりプログラムされたフィードレート(パスフィードレート)はブ
ロック内でプログラムされたすべてのパス軸に適用されますが,同期軸には適用
されません。同期軸がパス軸のようにプログラムされたパスをカバーするのに同じ
時間がかかります。
FGROUP コマンド
インストラクション FGROUP が , その軸がフィードデターミングパス軸(パス速
度の算定に用いられる)か同期軸(パス軸の算定に用いられない)であるかを決
定します。
例
N05 G00 G94 G90 M3 S1000 X0 Y0 Z0
N10 FGROUP(X,Y)
軸 X および Y はパス軸です。
軸 Z は同期軸です。
N20 G01 X100 Y100 F1000
プログラムされたフィードレート 1000 mm/min
軸 X のフィードレート = 707 mm/min
軸 Y のフィードレート = 707 mm/min
N30 FGROUP (X)
軸 X はパス軸です。
軸 Y は同期軸です。
N20 X200 Y150
プログラムされたフィードレート 1000 mm/min
軸 X のフィードレート = 1000 mm/min
軸 Y のフィードレートは自動的に 500 mm/min に
設定されます。なぜなら,そのパス軸の半分のみ
を移動する必要があるからです。
(注)チャンネル軸名は FGROUP コマンド (MD:
AXCONF_CHANAX_NAME_TAB により定義された ) を用い
るために必要です。
アプリケーション
らせん補間の場合,以下のいずれであるかを指定するために FGROUP をプログラ
ムします。
• プログラムされたフィードレートはパス(プログラムされた軸 3 つすべてがパ
ス軸です)に適用されます。
• プログラムされたフィードレートはサークル(2 つの軸がパス軸,インフィー
ド軸が同期軸です)に適用されます。
1-541
■ 軸構成
以下の図は個々の軸名と共にジオメトリ軸,特殊軸チャンネル軸ならびにマシン
軸間の割当てを示しています。割当ては MD で作成されます(1.11.4「データの説
明」を参照)
。
チャンネル 2
チャンネル 1
第 1 ジオメトリ軸 [0]
第 2 ジオメトリ軸 [1]
第 3 ジオメトリ軸 [2]
X
Y
Z
チャンネル 2
第 1 チャンネル軸 [0]
チャンネル 1
第 2 チャンネル軸 [1]
X
Y
Z
B
MACH
C
...
第 3 チャンネル軸 [2]
第 4 チャンネル軸 [3]
第 5 チャンネル軸 [4]
第 6 チャンネル軸 [5]
第 7 チャンネル軸 [6]
第 8 チャンネル軸 [7]
...
...
...
チャンネル 2
チャンネル 1
1
2
3
チャンネル 2
チャンネル 1
1
2
3
4
5
6
0
0
...
第 1 マシン軸 [0]
第 2 マシン軸 [1]
第 3 マシン軸 [2]
第 4 マシン軸 [3]
第 5 マシン軸 [4]
第 6 マシン軸 [5]
第 7 マシン軸 [6]
第 8 マシン軸 [7]
...
...
...
図 1.83 軸構成
(注)ジオメトリ軸は昇順で間隔をあけずにチャンネルに割当てる
必要があります。
特殊ケース
3 つのジオメトリ軸が MD 内でチャンネル軸に割当てられます。
• 3 つのジオメトリ軸の割当てられないチャンネル軸のすべてが特殊軸です。
• チャンネル軸がマシン軸に割当てられます。
• スピンドルもマシン軸に割当てられます。
1-542
チャンネル軸ギャップ(SW 5.1)
SW バージョン 5 以降のバージョンにおいては,MD 20070:
AXCONF_MACHAX_USED を用いて MD 20080: AXCONF_CHANAX_NAME_TAB
に応じてチャンネル軸すべてをマシン軸(ローカル軸ならびにリンク軸)に割当
てる必要はありません。アプリケーション内の実際のマシンがチャンネル軸に割
当てられたマシン軸を有する場合,MD 20070: AXCONF_MACHAX_USED に入力
された値は論理マシン軸像イメージ MD 10002: AXCONF_LOGIC_MACHAX_TAB
otherwise -1 に関係しています。
使い方 :
製造者のさまざまなシリーズのいろいろなバージョンのマシンについてセミディ
ファインドされたチャンネル軸に一貫した名称をつけてください。
利点 :
異なるマシンの基本構成の標準化,マシンを拡張するときの再構成が簡単,プロ
グラムの移動性
1-543
例
以下の例では,工作機械チャンネル軸は実在するマシン軸なしで指定されていま
す。網掛け表示された構造体は SW 5 以降のバージョンで用いられます。
チャンネル 2
チャンネル 2
第 1 チャンネル軸 [0]
チャンネル 1
第 2 チャンネル軸 [1]
X
Y
Z
B
マシン
ツール
C
C1
...
第 3 チャンネル軸 [2]
第 4 チャンネル軸 [3]
第 5 チャンネル軸 [4]
第 6 チャンネル軸 [5]
第 7 チャンネル軸 [6]
第 8 チャンネル軸 [7]
...
チャンネル 1
ギャップ
論理マシン軸イメージ
$MN_AXCONF_LOGIC_MACHAX_TAB
ローカルマシン軸
MD 10000: AXCONF_MACHAX_NAME_TAB
コンテナ 1
第 1 マシン軸 [0]
第 2 マシン軸 [1]
第 3 マシン軸 [2]
第 4 マシン軸 [3]
第 5 マシン軸 [4]
第 6 マシン軸 [5]
第 7 マシン軸 [6]
第 8 マシン軸 [7]
...
コンテナリンク軸
リンク軸
図 1.84 チャンネル軸ギャップを有する軸構成
■ リンク軸 (SW 5 以降 )
リンク軸は物理的に別の NCU に接続されている軸でその位置はこの NCU により
コントロールされます。リンク軸は別の NCU のチャンネルに動的に割当てること
ができます。リンク軸は個々の NCU をもとにしたローカル軸ではありません。
軸コンテナのコンセプトは NCU へ割当ての動的変更に用いられます。パートプロ
グラムの GET ならびに RELEASE による軸交換は NCU の範囲を超えるリンク軸に
は用いられません。
要求事項 :
• 関与する NCUs, NCU1 ならびに NCU2 はリンクモジュールを介する高速モ
ジュールコミュニケションにより接続する必要があります。
参照: /PHD/, Configuring Manual NCU 571-573.2, Link Module
• その軸はマシンデータにより適切に設定される必要があります。
• リンク軸オプションをインストールする必要があります。
1-544
チャンネル 1
チャンネル 1
チャンネル 2
リンクモジュール (HW)
リンクモジュール (HW)
リンクコミュニケーション
図 1.85 リンク軸の概要
軸コンテナ (SW 5 以降 )
軸コンテナはローカル軸またはリンク軸がチャンネルに割当てられている環状
バッファデータ構造です。環状バッファは環状にシフトすることができます。
ローカル軸またはリンク軸を基準にすることに加えて,論理なマシン軸イメージ
も軸コンテナを直接,基準にすることができます。そのような基準は以下からな
ります。
• コンテナ番号
• スロット ( 対応するコンテナ内の環状バッファロケーション )
環状バッファロケーションにおける入力は以下のいずれかを含みます。
• ローカル軸
• リンク軸
1-545
チャンネル軸
1 ローカルマシン軸 2
2 ローカルマシン軸 3
3
6 コンテナなしのリンク軸
7 軸コンテナ 1 スロット 1
8 軸コンテナ 3 スロット 2
チャンネル 1
論理マシン軸イメージ
NCK の内部軸
NCU に割当てられた
軸コンテナ 1 環状バッファのロケーション(スロット)
NCU 1, M 軸 1
NCU 2, M 軸 2
NCU 2, M 軸 1
軸コンテナ 2 環状バッファのロケーション(スロット)
軸コンテナ 3 環状バッファのロケーション(スロット)
NCU 3, M. 軸 1
NCU グローバル(リンクメモリ中)
図 1.86 論理マシン軸像による軸コンテナ上のチャンネル軸のマッピング
軸コンテナの入力は個々の NCU を基にしたマシン軸またはリンク軸を含みます。
個々の NCU の論理マシン軸イメージ $MN_AXCONF_LOGIC_MACHAX_TAB 内の
入力は固定されます。
1-546
■ 座標系
定義
DIN 66217 は,工作機械用に時計方向の直交座標系の使用を指定します。
X, Y, Z
互いに直交した軸
A, B, C
X, Y, Z を中心に回転する回転軸
図 1.87 時計回りの直交座標系
次の座標系が定義されます。
• マシン座標系 (MCS)
• 基本座標系 (BCS)
• 基本原点系 (BZS)
• 設定可能な原点系 (SZS)
• ワーク座標系 (WCS)
現在の WCS
プログラム可能な FRAMES
G54...G599 設定可能な FRAMES
基本オフセット(基本フレーム)
DRF オフセット,外部原点オフセット
キネマティックス変換
軸方向のプリセットオフセット
図 1.88 フレームシーケンスおよび座標系
1-547
座標系はキネマティックス変換および FRAMES により定義されます。図 1.88 は
この関係を示しています。
キネマティックス変換は MCS から BCS を導くことに用いられます。キネマ
ティックス変換がアクティブでない場合,BCS は MCS と同じです。
基本フレームは BCS を BZS 上にマップします。
起動した設定可能な FRAME G54...G599 が BZS を SZS に変えます。
WCS はプログラミングの基本でプログラム可能な FRAME により定義されます。
■ マシン座標系 (MCS)
マシン座標系(MCS) は物理的にすべての有効なマシン軸から構成されます。
図 1.89 マシン軸 X, Y, Z, B, C( 5 軸フライス旋盤)を有する MCS
図 1.90 マシン軸 X, Z (回転テーブル)を有する MCS
1-548
軸のプリセットオフセット
「プリセット」機能はマシン座標系で新しいコントロール原点を定義することに用
いることができます。プリセット値はマシン軸上で動作します。その軸が「プリ
セット」ともに移動することはありません。
警告
プリセット後はレファレンス点が無効になります。
この機能はできるだけ使用しないでください。
基本フレーム(1.11.2 ■「チャンネル内でアクティブなフレーム」を参照)
をプリセットオフセットの代わりに使用すべきです。
■ 基本座標系 (BCS)
基本座標系 (BCS) は互いにジオメトリカルな関係を持たない他の「特殊」軸と違
い互いに垂直な 3 つの軸(ジオメトリ軸)から構成されます。
キネマティックス変換を持たない工作機械の場合
BCS がキネマティックス変換なしで MCS 上にマップされる場合,BCS ならびに
MCS は常に一致します(たとえば,TRANSMIT/face 変換,5 軸の変換および 3 つ
のマシン軸まで)。
そのようなマシン上では,マシン軸ならびにジオメトリ軸は同じ名称を有します。
1-549
マシン原点
図 1.91 キネマティックス変換をしない MCS=BCS
キネマティックス変換をもつ工作機械の場合
BCS がキネマティックス変換により MCS 上に描かれる場合,BCS ならびに MCS
は一致しません。(たとえば,TRANSMIT/face 変換,5 軸の変換または 3 つ以上の
軸)
そのようなマシンでは,マシン軸ならびにジオメトリ軸は異なる名称を有する必
要があります。
キネマティックス変換
基本座標系 (BCS)
マシン座標系 (MCS)
図 1.92 MCS ならびに BCS 間のキネマティックス変換
1-550
マシンキネマティックス
ワークは常に 2 次元または 3 次元の直交座標系内でプログラムされます (WCS)。
しかし,そのようなワークは互いに垂直でない回転軸または直線軸を持った工作
機械上でこれまでたびたびプログラムされています。キネマティックス変換は
ワーク座標系(直交)でプログラムされた座標を実際の機械動作で示すために用
いられます。
参照: 3.1 3 ~ 5 軸刃先方向制御(F2)
2.7 座標変換機能(M1)
■ 外部原点オフセット
外部原点オフセットのオフセットは必要とされる各軸の直線成分により定義され
ます。フレームと異なり,回転,スケーリングならびにミラーリングの成分は不可
能です。
オフセット値の設定
以下の方法でオフセット値が設定されます。
• PLC
- FE 機能ブロックを用いる
• 操作パネル上の
- メニュー「現在の原点オフセット」による
• NC プログラムによる
- システム変数 $AA_ETRANS[axis] への割当て
外部原点オフセット
基本原点系 (BZS)
基本座標系 (BCS)
図 1.93 BCS および BZS 間の外部の原点オフセット
1-551
オフセット値の起動
PLC signal DB31, ~ DBX3.0 によりあらかじめ定義されたオフセット値を有効にす
ることができます。
起動の効果
オフセット起動後,この軸にはじめてモーションブロックが実行されると軸のオ
フセットがアクティブになります。
実行できるシーケンスの例
G0 X100
X150
; このモーションの間,外部の新しい原点オフセットが PLC により
起動される。
X200
; 速度リザーブが有効でない(オーバライド 100%)場合,新しい
ZOE は G0 プログラムのためにブロックエンド (X200) で取消さ
れます。
パワーアップ
外部原点オフセットの最新の有効なオフセット値はパワーアップ(電源オン)後
に保存され,新しい起動信号が設定されるまで有効にはなりません。
RESET /プログラムエンド
起動した値は RESET ならびにプログラムエンド後もアクティブなままです。
抑止
そのブロックが処理されている間に NC プログラムインストラクション "SUPA" が
外部原点オフセットを抑止します。
リファレンスポイントアプローチモードのコマンド G74 ( リファレンスポイントアプ
ローチ ) ならびに同等のオペレータアクションが,リファレンスポイントアプローチ
の間,外部原点オフセットを抑止します。
G74 の場合,すなわち,自動または MDA モードの場合,予備のアクティブな外部原
点オフセットはブロックのその次の移動モーションにより再び自動的にアクティブ
になります。
モードがリファレントポイントアプローチから変化後,リファレンスされた軸の
VDI 信号を再起動のために設定する必要があります。
プログラミング
新しいオフセットの設定 :
次のインストラクションが新しいオフセット値を軸別システム変数
$AA_ETRANS[axis] に入力します。
$AA_ETRANS[axis]=Ri
R i は 新しい値を含む DOUBLE 型の計算変数です。
1-552
設定値はコントロールの揮発性メモリ内に置かれます。
リーディング :
次のインストラクションが軸別基本外部原点オフセットに関するアクティブなオ
フセット値を読取ります。
R i =$AA_ETRANS[axis]
R i は読取られた値を含む DOUBLE 型の計算変数です。
アクティブ値はコントロールシステムのバッテリバックアップ付きメモリから読
取られます。
(注)設定値がアクティブになっていない場合は,読取り値が設定
値と異なる場合があります。最新の設定値がアクティブに
なっていない場合,読取り値は以前に設定した値です。
DRF オフセット
DRF (Differential Resolver Function) オフセットが相対的原点オフセットをハンドホ
イールを用いて設定します。それがジオメトリ軸ならびに特殊軸の基本座標系で作
動します。この機能は,たとえば,プログラムされたブロック内のツール摩耗を
補正します。
1-553
■ 基本原点系 (BZS)
基本原点系
基本原点系 (BZS) は DRF オフセット,外部原点オフセット,完全基本フレームを有
する基本座標系から形成されます。回転,オフセット,スケーリング , ミラーリング
が基本フレーム座標変換により,どのチャンネルにおいても可能です。
基本フレーム
基本原点系 (BZS)
基本座標系 (BCS)
図 1.94 BCS と BZS の間の基本フレーム
1-554
基本オフセット
基本オフセットは BCS と BZS の間のグローバル座標変換を表します。たとえば,
基本オフセットはパレット原点の定義に使用できます。
プログラム可能な
フレーム
ワーク 2
パレット
基本フレーム
プログラム可能な
フレーム
ワーク 1
図 1.95 基本オフセットの利用例
特徴 :
• ユーザはオペレータアクションによってパートプログラムから,および PLC か
ら基本オフセットを変えることができます。
• 8 つまでのグローバル基本フレームおよび 8 つまでのチャンネル別基本フレー
ムを作成することができ,互いを連結することによって完全な基本フレームを
作成することができます。
• 基本フレームは MD 20110: RESET_MODE_MASK の設定に応じて作動します。
変更された値はプログラムスタート,RESET または G54 ~ G599 で有効とな
ります。
• 基本オフセットをすぐに有効にしたい場合は,適切な G コードを実行するため
に FC9 を用いて PLC を介して ASUP をスタートさせます。
1-555
■ 設定可能な原点系 (SZS)
設定可能な原点系
設定可能な原点系 (SZS) はプログラム可能なフレームのない(MCS 側から見た場
合)ワーク座標系です。ワーク原点は設定可能な FRAMES G54 ~ G599 で定義し
ます。
設定可能な原点系 (SZS)
基本原点系 (BZS)
設定可能な FRAME: G54 ~ G599
図 1.96 BZS と SZS の間の設定可能な FRAME
プログラム可能なオフセットは設定可能な原点系上で作動します。すべてのプログ
ラム可能なオフセットは設定可能な原点系に属しています。
補助軸(1 次元の,座標系によるジオメトリカルな関係を持たない)も SZS の一部で
す。
設定可能な原点系の MMC (SW 5 以降 ) 上における表示
設定マシンデータ MD 9424 MA_COORDINATE_SYSTEM により 3 つの実際値ウィ
ンドウに表示された WCS (WCS から見た場合)の実際値がプログラム可能なオ
フセットなしで前のとおりに表示させるか,プログラムされたオフセットを含む
設定可能な原点系で表示させるかを定義することができます ( たとえば,
$P_FRAME = CTRANS(X,10) より )。座標系は引き続き WCS として表示されます。
• MA_COORDINATE_SYSTEM=0: 前のとおりに表示
• MA_COORDINATE_SYSTEM=1: SZS で表示
例:
プログラム
WCS 表示
SZS 表示
X100
100
100
X0
0
0
$P_FRAME = CTRANS(X,10)
0
0
X100
100
110
1-556
■ ワーク座標系 (WCS)
WCS
ワーク座標系 (WCS) とは,互いに垂直に配置された 2 つまたは 3 つの軸(ジオメ
トリ軸)と,ジオメトリカルな関係を持たないその他の軸(補助軸)で構成され
ます。
WCS はプログラミングの基礎となります。
プログラム可能な FRAME
ワーク座標系 (WKS)
設定可能な原点系 (SZS)
図 1.97 SZS と WCS の間のプログラム可能な FRAME
1-557
■ フレーム
概要
スケーリング
ミラーリング
回転
オフセット(微)
オフセット(粗)
BZS= 基本原点系
SZS= 設定可能な原点系
図 1.98 FRAME の構成要素
FRAME とは,ある直交座標を別の直交座標に変換する計算規則です。
FRAME は次の構成要素から構成されます。
• オフセット
→ TRANS, ATRANS, G58 , G59 によりプログラムされます
• 回転
→ ROT , AROT によりプログラムされます
• スケーリング → SCALE,ASCALE によりプログラムされます
• ミラーリング → MIRROR,AMIRROR によりプログラムされます
(注) FRAMES の詳細については次を参照してください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
オフセット,スケーリングおよびミラーリングはジオメトリ軸用にプログラムで
きます。プログラム中で回転させることができるのはジオメトリ軸だけです ( 直交
座標系においてはジオメトリカルな関係はジオメトリ軸についてのみ有効です )。
1-558
プログラム可能な FRAME
ワーク
座標系 (WCS)
設定可能な原点系 (SZS)
設定可能な FRAME
完全な基本フレーム
基本原点系 (BZS)
基本座標系 (BCS)
X, Y, Z ジオメトリ軸
図 1.99 座標系を生成するフレーム
変換
すべての FRAME(フレーム)の変換要素は以下で構成されます。
• オフセット(粗)
ツールセッタにより定義されます。アクセス権は MMC 入力により制限するこ
とができます。
• オフセット(微)
一定の入力リミット内で MMC を介してオペレータが定義できます。
オフセット(微)オプションは MD 18600: MM_FRAME_FINE_TRANS を用い
て設定します。
その目的は全体のオフセットをオフセット(粗)とオフセット(微)の要素に分
けることにより,オペレータがワークを衝突させることがないように保護するこ
とです。
オフセット(粗)およびオフセット(微)が合わさって全体のオフセットとなり
ます。オフセット(微)を構成する場合は,G58 と G59 のみを用います。
1-559
オフセット TRANS
すべてのジオメトリ軸および特殊軸のプログラム可能なオフセットは TRANS によ
りプログラムされます。
新たな変換が前の変換,回転,スケーリング,またはミラーリングに基づいて行
われる場合,ATRANS をプログラムする必要があります。
回転 ROT
ROT を用いて,すべてのジオメトリ軸のプログラム可能な回転をプログラムします。
→ 空間のすべての方向が 2 つの回転により定義できます。
2 つ以上の回転がブロック内でプログラムされる場合,MD 10600:
FRAME_ANGLE_INPUT_MODE (FRAME による回転の入力タイプ ) が 3 つのジオ
メトリ軸のまわりで回転する方法を指定します。これらの回転がブロック内でプロ
グラムされる順序には関連性がありません。
以下を用いて計算を設定できます。
• Euler 角
• RPY
Euler 角による回転 ROT
Euler 角による回転を計算する順序は以下のとおりです。
1. 最初に Z 軸を中心にした回転が実行します (ROT Z...)。
2. 次に X’ 軸を中心にした回転が実行します (ROT X...)。
3. 最後に Z" 軸を中心にした回転が実行します (ROT Z...)。
Z 軸を中心に回転
X’ 軸を中心に回転
図 1.100 Euler 軸による ROT
1-560
Z’’ 軸を中心に回転
Euler 軸による ROT
回転は以下のシーケンスの RPY の原理に従って計算されます。
1. はじめに Z 軸を中心にした回転が実行します (ROT Z...)。
2. 次に Y’ 軸を中心にした回転が実行します (ROT Y...)。
3. 最後に X’’ 軸を中心にした回転が実行します (ROT X...)。
Y’ 軸中心の回転
Z 軸中心の回転
X’’ 軸中心の回転
図 1.101 RPY による ROT
(注)設定 RPY は,制御装置においてパートプログラム中に回転を
プログラムする場合に使用すると便利です(ワーク準備また
はポストプロセッサには適していません)。
複数の回転を伴う ROT の詳細については次を参照してください。
参照: YS840DI ユーザーズマニュアル・プログラミング編
スケーリング SCALE
SCALE を用いてすべてのジオメトリ軸および特殊軸のプログラム可能なスケール
をプログラムします。
新たなスケーリングが前のスケーリング,回転,変換,ミラーリングに基づいて
行われる場合,SCALE をプログラムする必要があります。
ミラー MIRROR
MIRROR を用いてすべてのジオメトリ軸のプログラム可能なミラーリングをプロ
グラムします。
新たなミラーリングが前のミラーリング,回転,変換,スケーリングに基づいて
行われる場合,MIRROR をプログラムする必要があります。
1-561
MIRROR (SW 5 以降 )
MD10610 MIRROR_REF_AX はミラーリング軸を定義するのに使用します。
MD10610 = 0:
ミラーリングはプログラムされた軸のまわり
で行われます。
MD10610 = 1 または 2 または 3:
入力値によって,ミラーリングが特定の基
準軸のミラーリングに対して,および他の 2
つのジオメトリ軸の回転に対してマップさ
れます。
SW 4 以前のソフトウェアバージョンでは,座標軸の特定の値,たとえば,
MIRROR X0 の値 0 は評価されませんでした。しかし,MIRROR はトグル機能を有
していました。すなわち,MIRROR X0 はミラーリングを起動し,次の MIRROR
X0 がミラーリングを停止します。
MD10612 MIRROR_TOGGLE = 0 を用いてプログラム値が評価されるように指定でき
ます。値 0, すなわち MIRROR X0 は軸のミラーリングを停止させます。まだミラー
リングされていない場合は,値が 0 でなければ,その軸はミラーリングされます。
FRAME チェーン
現在の FRAME は完全基本フレーム,設定可能な FRAME,およびプログラム可能
な FRAME の組合わせで構成されます。最初に完全基本フレーム,次に設定可能
な FRAME, そして設定可能な FRAME が実施されます ( 基本座標系からワーク座
標を見た場合 )。
コントローラの応答
モードの変更は FRAMES に影響を与えません。すべてのオフセットが保持されます。
表 1.20 座標変換に対するコントローラの応答
座標変換
電源オン
リセット,プログラムエンド
プログラム可能な
FRAME
削除
削除
設定可能な FRAME
不変 , MD 20150:
保持 , MD 20110:
GCODE_RE-SET_ VALUES に RESET_MODE_MASK に従う
従う ( デフォルト G500)
基本オフセット
不変
保持 , MD 20110:
RESET_MODE_MASK に従う ,
ビット 14
パートプログラム
スタート
削除
保持 , MD20112:
START_MODE_MASK
に従う
保持
外部原点オフセット 不変,しかし再度起動させる 保持
必要がある
保持
DRF オフセット
保持
削除
保持
1-562
G91 を有する FRAME(SW 4 以降 )
G91 による相対的プログラミングは,原点オフセットが選択された場合に,プロ
グラムされた相対値にオフセット値が移動されるように定義されます。
スクラッチングのようなアプリケーションにはプログラムされたパスだけを相対
寸法を用いて移動する必要があります(起動した原点オフセットを移動する必要
はありません)
。
シーケンス :
• ツール先端でワークを擦ります。
• ツールオフセット分だけ実際位置を少なめにして,その実際位置(実際値)を
基本フレーム(基本オフセット)に保存します。
• 原点位置から相対的に移動します。
起動
設定データ SD 42440: FRAME_OFFSET_INCR_PROG を用いて以下を設定します。
• 値=1
原点オフセットを FRAME および軸の相対プログラミング上に戻します
(= デフォルト設定 )。
• 値=0
プログラムされたパスだけが移動されます。
例1
従来の応答には,原点オフセットが移動されます。
SD 42440: FRAME_OFFSET_INCR_PROG = 1
; G54 に,25 の X でのオフセット
が含まれます。
G90 G54
;
G1 G91 X10;
; オフセットが移動されます。→位置 X35
例2
原点オフセットは元に戻りません。
SD 42440: FRAME_OFFSET_INCR_PROG = 0
; G54 に,25 の X でのオフセット
が含まれます。
G90 G54
G1 G91 X10
;
; →位置 X10
; オフセットは選択されますが移
動されません。
G90 X50
; →位置 X75
1-563
; オフセットは移動されます。
例3
FRAME 抑止による応答
SD 42440: FRAME_OFFSET_INCR_PROG = 0
; G54 に,25 の X でのオフセット
が含まれます。
G90 G54 X100
; →位置 X125
G53 X20
; このブロック内の原点オフセットを取消します。→位置 X20
G91 X100
; デルタ 100 だけがここへ移動されます。→位置 X120
G91 G53 X0
; 移動しません(デルタは移動されません)
条件
その応答はオフセットがプログラムエンドおよび RESET (MD 20110:
RESET_MODE_MASK, ビット 5=1) 以上にアクティブになるように設定された場
合,および相対パスが第 1 パートプログラムブロック内にプログラムされた場合,
オフセットは常にプログラムされたパスに戻ります。
これはソフトウェアバージョン 4.3. まで適用されます。そのあとのソフトウェア
バージョンについては,MD 20152 index 7 を用いて,その設定を定義する必要があ
ります。表 1.24 を参照してください。
(注)この構成の場合,パートプログラムは常に絶対プログラミン
グで開始する必要があります。
G58, G59 軸のプログラム可能な原点オフセット (SW 5 以降 )
G58 および G59 を用いて,プログラム可能なフレームのフレーム要素の軸置換を
することができます。オフセットが内部で絶対要素と,追加プログラムされたオフ
セットの要素とに細分化されます。これらの要素はプログラムコマンド G58 およ
び G59 で変更することができます。これらの機能はオフセット(微)が形成され
た場合にだけ用いることができます。
前提条件 :
MD24000 FRAME_ADD_COMPONENTS = 1,
それ以外は,G58, G59 によりアラームが出力されます。
プログラム可能なフレームの変換要素は以下のものに細分化されます。
• G58: 絶対要素(オフセット(粗))
• G59: 追加してプログラムされた変換(オフセット(微)
)の要素
G58: 絶対要素は TRANS, CTRANS を介して変更することができます。これによっ
て追加要素はゼロにリセットされます。
G58 は特定の軸の絶対変換要素だけを変えます,追加でプログラムされた変換は
そのままです。
G58 X... Y... Z... A... ...
G59 は ATRANS によりプログラムされた特定の軸について追加でプログラムされ
た変換軸の上書きに用いられます。
G59 X... Y... Z... A... ...
1-564
例:
TRANS X10 Y10 Z10
ATRANS X5 Y5
; 全変換 X15 Y15 Z10
G58 X20
; 全変換 X25 Y15 Z10
G59 X10 Y10
; 全変換 X30 Y20 Z10
G58 および G59 は設定されたオフセット(微)との組合わせでプログラム可能な
フレームに用いることができます。G58 または G59 が 設定されたオフセット(微)
と組合わされて使われない場合には,アラーム "18312 Channel %1 Block %2 Frame:
Fine offset not configured" が出力されます。変換の絶対要素は粗いオフセット要素
に保存されます。追加した変換要素はオフセット(微)要素に保存されます。プロ
グラム可能なフレームはこの目的のために拡張されます。
プログラム可能なフレームがローカルフレーム変数 (LUD または GUD) に保存さ
れ,書戻された場合は,オフセット(微)要素も転送されます。以下の表に絶対
および追加の変換に関するプログラムコマンドの効果を示します。
表 1.21 相対/絶対オフセットに対する効果
オフセット(粗)または
絶対オフセット
コマンド
オフセット(微)または
相対オフセット
コメント
TRANS X10
10
変化なし
X 用絶対オフセット
ATRANS X10
変化なし微
( 旧 ) + 10
X 用相対オフセット
CTRANS(X,10)
10
0
X 用オフセット
CTRANS()
0
0
オフセットの取消し
CFINE(X,10)
0
10
X のオフセット(微)
$P_PFRAME[X,TR] = 10 10
変化なし
X のプログラムオフセット
$P_PFRAME[X,FI] = 10
変化なし
10
X 用プログラムオフセット(微)
G58 X10
10
変化なし
X 用絶対オフセットの上書き
G59 X10
変化なし
10
X 用相対オフセットの上書き
オフセット(微)(SW 5 以降 )
MD18600 MM_FRAME_FINE_TRANS を用いて次の値にオフセット(微)を設定す
ることができます。
0:
オフセット(微)は入力またはプログラムすることはできません。G58 お
よび G59 は不可能です。
1:
設定可能なフレーム,基本フレーム,およびプログラム可能なフレーム用
のオフセット(微)
。G58 および G59 は入力もプログラムもできません。
■ NCU グローバルフレーム (SW 5 以降 )
一組の NCU グローバルフレームが NCU のすべてのチャンネルに用いられます。
NCU グローバルフレームを用いてすべてのチャンネルから読取りおよび書込みで
きます。NCU グローバルフレームはそれぞれのチャンネル内で起動されます。
NCU グローバルフレームを用いてチャンネルおよびマシン軸にオフセット,ス
ケールファクタおよびミラーリングオペレーションを適用できます。
With NCU グローバルフレームの場合,軸間にジオメトリカルな関係はありません。
1-565
それゆえ,回転の実行またはジオメトリ軸の識別子のプログラムは不可能です。
$P_NCBFR[n]
NCU グローバル基本フレーム
最大 8 個の NCU グローバル基本フレームが設定できます。
グローバルフレームの番号は MD 18602 MM_NUM_GLOBAL_BASE_FRAMES に設
定されます。
チャンネル別基本フレームも存在可能で,MD 18081 MM_NUM_BASE_FRAMES に
設定されます。
グローバルフレームは NCU のすべてのチャンネルから読取りおよび書込みできま
す。グローバルフレームに書込む場合,ユーザはチャンネル座標を保持する必要
があります。たとえば,これはウエイトマーカ (WAITMC) を用いることにより行
うことができます。
$P_UIFR[n]
NCU グローバル設定可能なフレーム
すべての設定可能なフレーム G500, G54 ~ G599 は NCU グローバルに設定するこ
とも,チャンネル別に設定することができます。
すべての設定可能なフレームは MD 18601 を用いてグローバルフレームとして定義
し直すことができます。
MM_NUM_GLOBAL_USER_FRAMES.
MD18601 > 0
チャンネル別設定可能なフレームなし
MD 28080 MM_NUM_USER_FRAMES は測定されません。
プログラミング
チャンネル軸識別子およびマシン軸識別子はフレームプログラムコマンドの識別
子として用いることができます。ジオメトリ軸識別子のプログラミングはアラー
ムにより定義されます。
回転はグローバルフレームで用いることができます。回転のプログラミングはア
ラーム:"18310 Channel %1 Block %2 フレーム:回転不可能 " により定義されます。
チャンネル別フレームによりグローバルフレームの結合が可能です。その結果生
じたフレームは全軸の回転を含んでいるすべてのフレーム要素を収めています。
グローバルフレームへの回転要素をもつフレームの割当てはアラーム「フレーム:
回転不可能」により定義されます。
1-566
■ チャンネル別フレーム
$P_CHBFR[n]
チャンネル内の基本フレームの数は MD28081 MM_NUM_BASE_FRAMES を介し
て設定されます。標準構成はチャンネルごとに少なくとも 1 つの基本フレームが
盛り込まれます。チャンネルごとに最大 8 つの基本フレームを入れることが可能
です。チャンネル内の 8 つの基本フレームに加えて,さらに 8 つの NCU グローバ
ル基本フレームを入れることができます。
システム変数 $P_CHBFR[n] は基本フレームの読取りおよび書込みに用いることが
できます。基本フレームに書込む場合,完全な連結基本フレームは G500, G54 ~
G599 インストラクションが実行されるまで起動しません。最初に,その変数は
MMC または PLC から基本フレームに書込むオペレーションを保存することに用
いられます。これらのフレーム変数はデータバックアップにより保存されます。
$P_UBFR
チャンネル内の第1基本フレーム
あらかじめ定義された変数 $P_UBFR への書込みオペレーションは同時にフィール
ドインデックス 0 を伴う基本フレームを起動することはありません。その起動は
G500, G54..G599 インストラクションが実行されるまで起こりません。この変数は
読取ることもプログラムに書込むこともできます。
$P_UBFR は $P_CHBFR[0] と全く同じです。
1 つの基本フレームが常にチャンネル内にあります。それゆえ,システム変数は旧
バージョンに匹敵します。チャンネル別フレームがない場合,アラーム「フレー
ム:インストラクション不可能」が読取りまたは書込みアクセスに出力されます。
プログラミング
設定可能なフレームまたは基本フレームをオペレータアクションによりまたは以
下のものを介して PLC により読取ったり書込んだりできます。
• パートプログラム
• 操作パネルインタフェース
オフセット(微)はグローバルフレームに用いることができます。
グローバルフレームの抑止は G53, G153, SUPA,G500 を用いてチャンネル別フレー
ムの場合と同じ方法で実行されます ( /PG/ および /PGA/ Programming Guide,Frame
Chapter をご参照ください )。
1-567
■ チャンネル内でアクティブなフレーム
$P_NCBFRAME[n]
現在の NCU グローバル基本フレーム
システム変数 $P_NCBFRAME[n] を用いて本グローバル基本フレームの配列要素の
読取りおよび書込みができます。その結果生じる完全な基本フレームが書込みオ
ペレーションの結果としてチャンネル内で計算されます。
変更されたフレームはそのフレームがプログラムされたチャンネル内でだけ起動
します。フレームを NCU の全チャンネルを変更する場合は,$P_NCBFR[n] および
$P_NCBFRAME[n] が同時に書込まれる必要があります。そのときに,その他の
チャンネルは,たとえば,G54 によってそのフレームを起動させる必要がありま
す。基本フレームが書込まれるときはいつも,完全な基本フレームは再度計算され
ます。
$P_CHBFRAME[n]
現在のチャンネル基本フレーム
システム変数 $P_CHBFRAME[n] を用いて現在のチャンネル基本フレームの配列要
素の読取りおよび書込みができます。その結果生じる完全な基本フレームが書込
みオペレーションの結果としてそのチャンネル内で計算されます。基本フレームが
書込まれるときはいつも,完全な基本フレームは再度計算されます。
$P_BFRAME
チャンネル内の現在の第1基本フレーム
フィールドインデックス 0 を有する現在の基本フレームはそのチャンネル内で有
効で,あらかじめ定義したフレーム変数 $P_BFRAME を用いてパートプログラム
内で読取ったり書込んだりできます。書込まれた基本フレームはすぐに計算で使
用されます。
$P_BFRAME は $P_CHBFRAME[0] と同一です。システム変数だけが基準として 1
つの有効値を有します。チャンネル別基本フレームがない場合,アラーム「フ
レーム:インストラクション不可能」が読取りまたは書込みアクセスに出力され
ます。
$P_ACTBFRAME
完全な基本フレーム
変数 $P_ACTBFRAME が完全な連結基本フレームを計算します。その変数は読取
り専用です。
$P_ACTBFRAME は以下に対応します。
$P_NCBFRAME[0] : ... : $P_NCBFRAME[n] : $P_CHBFRAME[0] : ... :
$P_CHBFRAME[n].
1-568
$P_NCBFRAME[n], n は $MN_MM_NUM_GLOBAL_BASE_FRAMES
を介して設定可能
$P_CHBFRAME[n], n は $MC_MM_NUM_BASE_FRAMES
を介して設定可能
BCS = 基本座標系
BZS = 基本原点系
図 1.102 基本フレームの連結配列
プログラム可能な FRAME
G54 ~ G599 設定可能なチャンネル別
または NCU グローバルな FRAMES
チェーニングされた基本フレーム,
チャンネル別および/または NCU グローバル
DRF オフセット , 外部原点オフセット
キネマティックス変換
MCS = マシン座標系
BCS = 基本座標系
BZS = 基本原点系
SZS = 設定可能な原点系
WCS = ワーク座標系
図 1.103 座標系と基本フレームの連結配列との間の相互関係
1-569
完全な基本フレームのプログラミング
システム変数 $P_CHBFRMASK および $P_NCBFRMASK を用いて「完全」基本フ
レームの計算に入れるための基本フレームを選択できます。その変数はそのプロ
グラム内にだけプログラムでき,操作パネルインタフェースを介して読むことが
できます。その変数の値はビットマスクと解釈され,$P_ACTBFRAME のどの基本
フレーム配列要素が計算に含まれるかを指定します。
$P_CHBFRMASK を用いてどのチャンネル別基本フレームが含まれるか定義でき
ます。そして $P_NCBFRMASK を用いてどの NCU グローバル基本フレームが計算
に含まれるかを特定できます。
変数がプログラムされると,完全基本フレームおよび完全フレームは再度計算さ
れます。リセット後およびデフォルト設定中に以下の値のように行われます。
$P_CHBFRMASK = $MC_CHBFRAME_RESET_MASK および
$P_NCBFRMASK = $MN_NCBFRAME_RESET_MASK
たとえば
$P_NCBFRMASK = ’H81’; $P_NCBFRAME[0] : $P_NCBFRAME[7]
$P_CHBFRMASK = ’H11’; $P_CHBFRAME[0] : $P_CHBFRAME[4]
$P_IFRAME
現在の設定可能なフレーム
あらかじめ定義されたフレーム変数 $P_IFRAME を用いてパートプログラムにあ
り,チャンネル内で有効な現在の設定可能なフレームを読取ったり書込んだりで
きます。書込まれた設定可能なフレームはすぐに計算に加えられます。
NCU グローバル設定可能なフレームの場合には,変更されたフレームはそのフ
レームがプログラムされているチャンネル内でだけ動作します。フレームが NCU
の全チャンネルで変更される場合 , $P_UIFR[n] および $P_IFRAME を同時に書換え
る必要があります。そのときにその他のチャンネルをフレーム,たとえば,G54 を
有するフレームに対応して起動させる必要があります。
$P_PFRAME
現在のプログラム可能なフレーム
$P_PFRAME は TRANS/ATRANS, G58/G59, ROT/AROT, SCALE/ASCALE, MIRROR/
AMIRROR のプログラミングの結果生じた,またはプログラム可能なフレームへ
の CTRANS, CROT, CMIRROR, CSCALE の割当てによって生じたプログラム可能
なフレームです。
設定可能な原点系 (SZS) およびワーク座標系 (WSC) 間の基準を設定する現在のプ
ログラム可能なフレーム変数。
$P_ACTFRAME
生じた現在の完全フレーム $P_ACTFRAME は,すべての基本フレーム,現在の設
定可能なフレームおよびプログラム可能なフレームの連結により確定されます。
フレーム要素が変更されるときには現在のフレームは常に更新されます。
$P_ACTFRAME は,$P_ACTBFRAME : $P_IFRAME : $P_PFRAME に対応します。
1-570
プログラムを介した入力,たとえば,
MMC を
介した入力
プログラムを介した入力,たとえば,
$P_UIFR[n]=CTRANS(X,10)
MMC を
介した入力
G500, G54 ~ G599
を介した起動
プログラムを介した入力,たとえば,
$P_NCBFRAM[1]=CTRANS(X,10)
プログラムを介した入力,たとえば,
プログラムを介した入力,たとえば, $P_PFRAME=CTRANS(X,10)
$P_IFRAME=CTRANS(X,10)
または TRANS X10
図 1.104 チャンネル内における完全なフレームの組合わせ
■ 運転ステータスおよびフレーム
電源オン後
以下の表に 電源オン後のフレームの応答を示します。
フレーム
応答
プログラム可能なフレーム
削除
設定可能なフレーム
保持,MD20110 RESET_MODE_MASK に従う
完全基本フレーム
保持,MD20110 RESET_MODE_MASK ビット 0 およびビット 14 従う
外部原点オフセット
不変,再起動の必要あり
DRF オフセット
削除
モード変更後
ジョグモードでは,回転がアクティブである場合,現行のフレームのフレーム要
素だけがジオメトリ軸を基準にしています。その他の軸方向のフレームは無視され
ます。
PLC 軸およびコマンド軸に対する応答は MD 32074
FRAME_OR_CORRPOS_NOTALLOWED に定義することができます。
RESET 後,プログラムエンド
基本フレームのリセット応答は MD 20110 RESET_MODE_MASK により確定され
ます。
1-571
MD20110 RESET_MODE_MASK
ビット 0 = 1 および ビット 14 = 0
ビット 0 = 1 および ビット 14 = 1
実行
結合完全基本フレームは削除されます。
完全基本フレームは MD24002
CHBFRAME_RESET_MASK および MD 10613
NCBFRAME_RESET_MASK に関して確定されます。
MD24002 CHBFRAME_RESET_MASK:
ビット 0 = 1: 第 1 チャンネル基本フレームは結合完全基
本フレームに含まれる。
ビット 7 = 1: 第 8 チャンネル基本フレームは結合完全基
本フレームに含まれる。
MD10613 NCBFRAME_RESET_MASK:
ビット 0 = 1: 第 1 NCU グローバル基本フレームは結合完
全基本フレームに含まれる。
ビット 7 = 1: 第 8 NCU グローバル基本フレームは結合完
全基本フレームに含まれる。
以下の表は RESET,プログラムエンド後のフレームの応答を示します。
フレーム
応答
プログラム可能なフレーム
削除
設定可能なフレーム
保持,$MC_RESET_MODE_MASK に従う
完全基本フレーム
保持,$MC_RESET_MODE_MASK ビット 0 および ビッ
ト 14 に従う
外部原点オフセット
保持
DRF オフセット
保持
パートプログラムスタート後
MD20112 START_MODE_MASK は基本フレームには関係なく,評価されません。
フレーム
応答
プログラム可能なフレーム
削除
設定可能なフレーム
保持,MD 20112 START_MODE_MASK に従う
完全基本フレーム
保持
外部原点オフセット
保持
DRF オフセット
保持
ブロックサーチ後,REPOS
グローバルフレームの特殊処理はありません。フレームが ASUP で変更される場
合,それはプログラム内に保持されます。Repos による再アプローチにより,変更
されたフレームが加わり,その変更は ASUP で起動されます。
1-572
■ ワーク関連の実際値系/リセット応答
座標系間の相互関係
以下の線図は製品レベル ≧ 2 のマシン座標系 MCS およびワーク座標系 WCS 間の
相互関係を示します。
G54 ~ G599 設定可能な FRAMES
基本オフセット ( 基本フレーム )
DRF オフセット,外部原点オフセット
キネマティックス変換
MCS = マシン座標系
BZS= 基本原点系
BCS = 基本座標系
SZS = 設定可能な原点系
WCS= ワーク座標系
図 1.105 座標系間の相互変換
参照: YS840DI ユーザーズマニュアル・プログラミング編
1.19 工具補正(W1)
1.9 補助機能出力(H2)
2.7 座標変換機能(M1)
3.5 位置同期制御と ESR(M3)
3.7 接線方向制御(T3)
1-573
■ パワーアップ,RESET/ パートプログラムエンドおよび
パートプログラムスタートのシステム設定
概念
制御系応答は以下が行われた後,工具長補正,変換,連結軸グループ,接線方向
のフォローアップ,プログラム可能な同期スピンドル機能のような G コードに変
えることができます。
• パワーアップ(電源オン)
• Reset/ パートプログラムエンド
• パートプログラムスタート
関連マシンデータ
MD 20110: RESET_MODE_MASK
MD 20150: GCODE_RESET_VALUES および,SW 4.4 以降,それの拡張版
MD 20152: GCODE_RESET_MODE (RESET 後の制御初期設定の定義 ) および
MD 20112: START_MODE_MASK ( パートプログラムスタート後の制御初期設定の
定義 )
一定のアプリケーション(たとえば,グリンディング)の場合,パートプログラ
ムが開始されるまで,個々の機能をリセット位置にしないことをお薦めします。こ
れは MD 20110, 20150, 20152, 20112 を設定することにより可能です。
表 1.22 MD によるシステム設定の変更
(以下の)MD で変更可能
ステータス
パワーアップ ( 電源オン )
MD 20110: RESET_MODE_MASK
MD 20150: GCODE_RESET_VALUES
RESET/ パートプログラムエンド
MD 20110: RESET_MODE_MASK
MD 20150: GCODE_RESET_VALUES
MD 20152: GCODE_RESET_MODE
パートプログラムスタート
MD 20110: START_MODE_MASK および
MD 20112: RESET_MODE_MASK
1-574
手順
目標システム応答の選択
• パワーアップ後 ( 電源オン )
MD 20110: RESET_MODE_MASK, ビット 0 = 0 または 1
パワーアップ ( 電源オン )
- MD 20140 に従って,
MD 20110
ビット 0=1
RESET_MODE_MASK
ビット 0
transformation をアクティブにする
- MD 20118 with MD 20050 に従って
ジオメトリ軸変換をアクティブにする
ビット 0=0 ( 初期値 )
ビット 2=1
ビット 6=1
MD 20110
電源オン前に選択された工具長
補正はアクティブなままです。
ビット 2 および
ビット 6
ビット 2 =0
MD 20120 , MD 20121 および MD 20130 に
従って工具長補正をアクティブにする
- 変換 OFF
- 工具長補正
OFF
- G コード MD20150: GCODE_RESET_VALUES
- アクティブな結合軸グループ アクティブでない
- 接線方向のフォローアップ アクティブでない
- 同期主軸結合
アクティブでない
- ジオメトリ軸割当て
MD 20050 AXCONF_GEOAX_ASSIGN_TAB
に従う
- 主値結合
アクティブでない
- 軸方向の回転フィードレート オフ
- 基本フレーム
アクティブでない
図 1.106 パワーアップ後のシステム設定
1-575
• RESET /パートプログラムエンドの後,MD 20110: RESET_MODE_MASK の
ビット 4-14 は 0 または 1 となる。ビット 4 ~ 13 は任意に結合できる。
RESET/ パートプログラムエンド
- G コードは MD 20152 および MD 20150 に従う :
MD 20110
ビット 0=1 - MD 20110, ビット 6-14 が評価される ; すなわち,関連
RESET_MODE_MASK
するビットに割当てられた機能がリセット設定とな
ビット 0
る,または現在の設定を保持する(以下の表を参照)
。
ビット 0=0 ( デフォルト )
現在の設定が保持される。
パートプログラムスタート
- G コード MD20150:
- ツール長補正 OFF
- 変換 OFF
- 結合モーション OFF
- 接線方向のフォローアップ from
- ジオメトリ軸の割当て MD 20050 に従う
- 基本値カップリング OFF
- 軸方向の回転フィ-ドレート OFF
ビット ...=1
MD 20112
START_MODE_MASK
ビット 4...14
RESET により起動された設定が
有効になる。
機能が RESET 状態となる。
ビット ... =0 ( デフォルト )
現在の設定が保持される。
第 1 パートプログラムブロックの処理
図 1.107 RESET/ パートプログラムエンドおよびパートプログラムスタート後の
システム設定
1-576
表 1.23 RESET およびパワーアップの応答の選択
20110
MD 番号
RESET_MODE_MASK
パワーアップおよびリセット / パートプログラムエンド後の制御初期設定の定義
以降の挙動
ビット 0 =0
パワーオン
( 起動 )
- 変換は無効
- 工具長補正は無効
ビット 0=1
- MD 20140: TRAFO_RESET_VALUE に従って,変更が
有効になる
- 工具長補正が以下の MD に従って有効になる
MD 20120: TOOL_RESET_VALUE
MD 20121: TOOL_PRESEL_RESET_VALUE および
MD 20130: CUTTING_EDGE_RESET_VALUE,
MD 20110 でビット 2 および 6 = 1 の場合 , ツール長オ
フセットは 電源オン に選択され,TLC は MD 20120,
20121, 20130 に従う
- G コード は MD 20150: GCODE_RESET_VALUES に従う - G コードは MD 20150:GCODE_RESET_VALUES に従う
- 結合軸グループは無効
- 結合軸グループは無効
- 接線方向のフォローアップは無効
- 非設定同期スピンドルカップリングはオフになる
- ジオメトリ軸の割当ては MD 20050 に従う
- 基本値カップリングは無効
- 軸方向の回転フィードレートオフ
- 基本フレームは選択されない
RESET/
プログラム
エンド
- 接線方向のフォローアップは無効
- 非設定同期スピンドルのカップリングは無効
- ジオメトリ軸の割当ては MD 20118, MD 20050 に従う
- 基本値カップリングは無効
- 軸方向の回転フィードレート オフ
- 基本フレームは選択されない
現在の設定が保持される。次のパートプログラムによ
り以下の初期設定が有効になる。
同期スピンドルカップリングが設定される場合,カッ
プリングは MD 21330: COUPLE_RESET_MODE_1 の機
能として設定される。
- G コード は MD 20150:GCODE_RESET_VALUES に従う
- ツール長補正はアクティブでない
GCODES は MD 20150, 20152 に従う
- 変換はアクティブでない
- 結合軸グループはアクティブでない
- 接線方向のフォローアップはアクティブでない
- 基本フレームは選択されない
- ジオメトリ軸の割当ては MD 20050 に従う
- 軸回転フィードレート OFF
1-577
表 1.24 MD 20110: RESET_MODE_MASK ビット 0...6 の実行
ビット 0=1
ビット 1=1
ビット 2=1
ビット 3=1
ビット 4 = 1
パワーアップおよび
RESET/ プログラム
エンド後の初期設定
は上記を参照。
D, T, M はツール選択
で出力されない。関
連のないアクティブ
なツールマネジメン
トによる。
bit 0=1 および bit 6
=1 の場合 , 最新のア
クティブツールの
ツールオフセットは
電源オン後 にアク
ティブになるアク
ティブツール(マネ
ジメントに関連のな
い)
。
テストモードで終了
した最新のテストプ
ログラムによりアク
ティブなツールまた
はツールオフセット
を用いる。
現在の平面が MD
20152 により交換さ
れた SW 5 に保持さ
れる。インデック
ス 5 は以下を参照。
ビット 0 =0
ビット 1 =0
ビット 2 =0
ビット 3 =0
ビット 4 = 0
ビット 5 = 0
ビット 6 = 0
プログラムテストを
起動する前に終了し
た最新のプログラム
によりアクティブな
ツールまたはツール
オフセットを用い
る。
MD 20150: GCODE_
RESET_ VALUES に
よる平面 ; SW 5 で
は MD 20152 イン
デックス 5 と置換え
られる。以下を参
照。
MD 20150:
GCODE_ RESET_
VALUES によるフ
レーム。SW 5 では
MD 20152 インデッ
クス 7 と置換えら
れる。以下を参照。
以下による MD
20120:
TOOL_RESET_VAL
UE, MD 20121:
TOOL_PRESEL_RE
-SET_ VALUE, MD
20130: CUTTING_
EDGE_RESET_VAL
UE; D, T, M の PLC
への出力(ビット 1
による)
パワーアップおよび
RESET/ パートプロ
グラムエンド後の初
期設定は上記を参
照。
D, T, M がツールセレ
クションに出力され
る。関連のないアク
ティブなツールマネ
ジメントによる。
電源オン 後に,
ツールオフセットな
し ( アクティブな
ツールマネジメント
の場合,実行しない
)。
ビット 5 = 1
ビット 6 = 1
現在の設定可能な
アクティブなツー
フレームは MD
ル長補正は保持さ
20152 により交換さ れる。
れた SW 5 に保持さ
れる。インデック
ス 7 は以下を参照。
表 1.25 MD 20110: RESET_MODE_MASK ビット 7...12 の実行
ビット 7 = 1
アクティブな変換が
保持される。
ビット 7 = 0
ビット 8 = 1
ビット 9 = 1
結合モーショングルー
プが保持される。
接線方向の補正が保
持される。
ビット 8 = 0
変換は MD 20140:
結合モーショングルー
TRAFO_REプは起動されない。
SET_VALUE に従う。
ビット 9 = 0
接線方向の補正は起
動されない。
ビット 10 = 1
ビット 11=1
非設定同期スピンド
回転フィードレート
ルカップリングはア
の現在の設定は保持
クティブを保持する。 される。
ビット 10 = 0
ビット 12=1
変更されたジオメトリ軸の割当ては
保持される。
ビット 11 =0
非設定同期スピンド
回転フィードレート
ル結合は切断される。 は有効でない。
ビット 12 =0
変更されたジオメトリ軸の割当ては
MD20118 に基づく MD 20050 に従い
削除される(互換性のため )
。
表 1.26 MD 20110: RESET_MODE_MASK ビット 13...14 の実行
ビット 13=1
ビット 14=1
アクティブなガイド
基本フレームの現在の
値結合は保持される。 設定は保持される。
ビット 13 =0
ガイド値結合は分割
される。
ビット 14 =0
基本フレームは削除さ
れる。
MD 20152: GCODE_RESET_MODE (SW 5 以降 )
SW 5 以降では,MD 20152: GCODE_RESET_MODE が MD 20110:
RESET_MODE_MASK からのビット 4 と 5 を置換える。設定オプションの拡張あり。
1-578
SW 4 およびそれ以前 :
RESET_MODE_MASK
ビット 4: 平面の制御
ビット 5: 設定可能なフレームの制御
SW 5 以降 :
MD 20150: GCODE_RESET_VALUES[i] で制御される各 G コードグループは MD
20152: GCODE_RESET_MODE[i] を用いて直接制御できます。
MD 20152:
GCODE_RESET_MODE[i]
(i = G コードグループ -1)
MD 20150:
GCODE_RESET_VALUES[i]
0
MD 20150 に保存された値は
アクティブである
1
最新のアクティブな/現在の値は
アクティブである
(注)マシンデータ MD20110 RESET_MODE_MASK における予備設
定オプションはもう適用されません。
この MD の対応ビットは予備として付け加えられます。これ
らのビットを含む書込みオペレーションは自動的に MD20150
GCODE_RESET_MODE の対応する配列要素に書換えられま
す。そしてアラーム 4502 が出力されます。
MD20110 RESET_MODE_MASK を読取る場合,その情報は
MD20150 GCODE_RESET_MASK の対応する配列要素によっ
て読取られ,MD20110 RESET_MODE_MASK に書込まれま
す。
MD 20112: START_MODE_MASK の実行は ,SW 5 では変更されません。
パートプログラムスタート
G コード(特に,アクティブな平面,アクティブな設定可能原点オフセット)に
関するパートプログラムスタート時の基本設定制御 ( 次の表のとおり ),アクティ
ブなツール長補正,変換および軸結合の定義 :
アプリケーション
MD 20112: START_MODE_MASK においてビットを設定することにより , 関連する
機能のリセットアクションをパートプログラムスタートまで遅延することができ
ます。
1-579
表 1.27 MD 20112: START_MODE_MASK ビット 1...7 の実行
ビット 1=1
D, T, M はツール選択で出
力されない ; 関連のない
アクティブなツールマネ
ジメントによる。
ビット 1 =0
ツール選択により出力さ
れる D, T, M ; アクティブ
なツールマネジメントを
用いた場合
ビット 2=1
ビット 3=1
予備
予備
ビット 2 =0
予備
ビット 4 = 1
ビット 5 = 1
ビット 6 = 1
平面は MD 20150:
GCODE_RESET_VAL-UES に従う
フレームは MD 20150:
GCODE_RESET_VAL-UES に従う
以下による MD 20120:
TOOL_RESET_VALUE,MD
20121:TOOL_PRESEL_RES
ET_VALUE, および MD
20130:
CUTTING_EDGE_RESET_
VALUE; PLC への D, T, M
の出力 ,
ビット 4 = 0
ビット 5 = 0
ビット 6 = 0
ビット 3
=0
予備
現在のフレームは保
持される。
現在の設定可能なフ
アクティブなツール長オフ
レームは保持される。 セットは保持される。
ビット 7 = 1
ビット 1 に基づく MD
20140: TRAFO_RESET_VALUE に 従う変
換
ビット 7 = 0
アクティブな変換は保
持される。
表 1.28 MD 20112: START_MODE_MASK ビット 8...14 の実行
ビット 8 = 1
結合モーショングループ
は起動されない。
ビット 8 = 0
結合モーショングループ
は保持される。
ビット 9 = 1
接線方向の
補正は起動
されない。
ビット 9 = 0
接線方向の
補正は保持
される。
ビット 10 = 1
ビット 11=1
非設定同期スピンド
予備
ル結合は切断される。
ビット 10 = 0
非設定同期スピンド
ル結合はアクティブ
のままである。
ビット 11 =0
予備
ビット 12=1
ビット 13=1
ジオメトリ軸は MD 20118 に基づく
MD 20050 に従い,削除される(互
換性のため)
ガイド値結合は分割
される
ビット 12 =0
変更されたジオメトリ軸の割当て
は保持される。
ビット 13 =0
アクティブなガイド
値結合は保持される
(注)・MD 20110: RESET_MODE_MASK で "1" に設定されたビット
は設定を保持します。
・MD 20112: START_MODE_MASK で "0" に設定されたビット
は設定を保持します。
1-580
ビット 14=1
予備
ビット 14 =0
予備
マシンデータの意味
表中の系列別マシンデータは次の意味を有します。
詳細は 1.11.4 ■「ワーク関連の実際値系」で説明します。
MD 20120: TOOL_RESET_VALUE
工具 (T 番号 ) の定義
これに割当てられた工具長補正値は,MD 20110: RESET_MODE_MASK に従う
RESET と POWER UP において考慮される必要があります。
MD 20121: TOOL_PRESEL_RESET_VALUE
RESET および MD 20110: RESET_MODE_MASK に従うパワーアップについて,
割当てられたツール長補正値を考慮する必要があるツールをあらかじめ選択し
たツール(T 番号)の定義
MD 20130: CUTTING_EDGE_RESET_VALUE
$MC_TOOL_RESET_VALUE のツールのエッジ番号(D 番号)の定義
MD 20140: TRAFO_RESET_VALUE
変換データブロック (TRAORI, TRAANG, SW version 4 以降 : TRANSMIT) の定
義
MD 20150: GCODE_RESET_VALUES
G グループの初期設定
MD 20152: GCODE_RESET_MODE
RESET 時の GCODE 初期設定
MD 20152 は,MD 20150: GCODE_RESET_VALUES でのそれぞれの入力におい
て,
MD 21330: COUPLE_RESET_MODE_1
軸結合の解除
MD 20050 AXCONF_GEOAX_ASSIGN_TAB
ジオメトリ軸とチャンネル軸間の割当て
MD 20110/20112 のビット 12 に影響する
MD 20118 GEOAX_CHANGE_RESET
MD 20110/20112 のビット 12 に影響する
1-581
例:
1. RESET 時に RESET 設定を有効にする
MD 20110 = ’H01’ ( ビット 0)
MD 20112 = ’0’
2. 変換はリセット/パートプログラムスタートに保持されます。
MD 20110 = ’H81’ ( ビット 0 + ビット 7)
MD 20112 = ’0’
3. 工具長補正はリセット/パートプログラムスタートの範囲を超えて保持されま
す。
MD 20110 = ’H41’ ( ビット 0 + ビット 6)
MD 20112 = ’0’
4. アクティブな平面(ビット 4 )と設定可能なフレーム(ビット 5 )はリセット
の範囲を超えて保持され,パートプログラムにリセットされます。
MD 20110 = ’H31’ ( ビット 4 + ビット 5)
MD 20112 = ’30’
(注)ビット 5 およびビット 6 の場合
工具長補正またはフレームが MD 20110/MD 20112 の構成のた
めにパートプログラムスタート/ MDA スタート上でアク
ティブであるとき,軸に対する最初のプログラミングインス
トラクションは絶対寸法を用いる必要があります(オフセッ
ト応答のため)。
例外 : MD 42442/MD 42440 は G91 によるオフセット応答を抑
止することに用いられます。
■ ワーク関連の実際値系の使用
必要条件,基本設定
前の項で述べた設定はそのシステムに合わせて作成されています。MMC 電源オン
で MCS があらかじめリセットされます。
WCS への切換え
操作パネルを介した WCS への切換えの影響を以下に示します。
• 軸の位置は WCS の原点を基準に表示されます。
MCS への切換え
操作パネルを介した MCS への切換えの影響を以下に示します。
• 軸の位置は MCS の原点を基準に表示されます。
1-582
■ 特殊反応
オーバストアリング
RESET 時に以下の状態をオーバストアする
- フレーム(原点オフセット)
- アクティブな平面
- 有効な transformation
- ツールオフセット
すぐにチャンネル内のすべての軸の実際値の表示に影響を与えます。
MMC 入力
• アクティブなフレーム(原点オフセット,運転エリアパラメータ)
• アクティブな工具長補正(運転エリアパラメータ)
上記の値が操作パネル上でオペレータアクションにより変更された場合,下記の
ステップが実行された後にディスプレイ上のデータに反映されます。
• RESET キーを押す
• 再選択
- パートプログラムによる原点オフセット
- パートプログラムによるツールオフセット
• リセット
- オーバストアリングによる原点オフセット ( 上記を参照 )
- オーバストアリングによるツールオフセット
• パートプログラムスタート
実際値の読取り
- フレーム ( 原点オフセット ) の起動または
- ツールオフセット起動
上記いずれかに従って,実際値が $AA_IW により WCS で読取られる場合,
たとえ軸がまだ有効になった変更に移動されていない場合でも,有効になった変
更は既にその結果に含まれます。
設定可能な原点系 (SZS) の実際値は,変数 $AA_IEN[axis] を用いて,それぞれの軸
において,パートプログラムから読取ることができます。
基本原点系 (BZS) の実際値 (BZS) は変数 $AA_IBN[axis] を用いて,それぞれの軸に
おいて,パートプログラムから読取ることができます。
1-583
実際値表示
プログラムされた輪郭機能は常に WCS に表示されます。次のオフセットが MCS
に追加されます。
- キネマティックス変換
- DRF オフセット/外部原点オフセット
- アクティブなフレーム
- 現在のツールのアクティブなツールオフセット
PLC による切換え
SW4.3 (840D) または SW2.3 (810D) 以降では,実際値は PLC を介して WCS, SZS,
BZS または MCS に表示できます。PLC はどの座標系がマシンのワーク座標系に対
応するかを定義できます。
MMC 電源オンにより MCS があらかじめ設定されます。信号 DB19 DBB0.7 "MCS/
WCS switchover" を用いて,PLC から WCS に切替えることができます。
PLC への移動
工具長補正が選択されると,補助機能 (D, T, M) が 、MD 20110/20112 ビット 1 に基
づいて PLC へ出力されます(あるいは PLC 以外)。
関連信号を 1.11.5「■信号の説明」で説明します。
(注) PLC により WCS が選択されていても,オペレータアクショ
ンによる そのモードにおいて WCS と MCS を切換えることが
可能です。しかし,モードまたはエリア変更時に,PLC に
よって選択された WCS が,読込まれて,有効になります。
1-584
1.11.3 補足条件
■軸
可用性
特になし。
■ 座標系
可用性
「外部原点オフセット」機能は基本バージョンの NCU 570, NCU 571, NCU 572 ,
NCU 573 を有する制御システムの SW 2 以降で使用可能です。基本フレームおよび
オフセット(微)は SW 4 以降で使用可能です。
■ フレーム
NCU グローバルフレーム
「 NCU グローバルフレーム」機能は SW 5 以降の基本バージョンで使用可能です。
G91 を有するフレーム
SD 42440 FRAME_OFFSET_INCR_PROG により拡張された G91 機能は SW 4 以降
で基本バージョンの NCU 571 , NCU 572, NCU 573 および NCU 573.2 による制御に
使用可能です。
SW5 以降
1 つのリンク軸である系列軸のプログラムはアラーム "14092 channel %1 block %2
axis %3 incorrect axis type" によって否定されます。NCU で物理的に存在する軸のみ
プログラムが可能です。
■ ワーク関連の実際値系/リセット応答
可用性
「ワーク関連の実際値系」機能は SW 2 以降の基本バージョンで使用可能です。
パートプログラムスタートの初期設定を定義するオプションは SW 3 の基本バー
ジョン機能として使用可能です。MD 20152: GCODE_RESET_MODE によるすべて
の G コードの制御は SW 5 以降で可能です。
1-585
1.11.4 データの説明 (MD,SD)
■ マシンデータの表示
9424
MD 番号
MA_COORDINATE_SYSTEM
実際値表示用座標表示
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : 符号付き文字,
1 バイト
適用開始 SW バージョン : 5
意味 :
このマシンデータを設定することにより,3 つの実際値ウィンドウ (small, wide,
large) に表示される WCS の実際値が以前のとおり
(MA_COORDINATE_SYSTEM=0) に表示するか,またはプログラムされた原点
オフセット (MA_COORDINATE_SYSTEM=1) を含む設定可能な原点系 (SZS) に
表示するかを定義できます。座標系は WCS として継続されます。
1-586
■ 一般マシンデータ
10000
MD 番号
AXCONF_MACHAX_NAME_TAB
マシン軸名
初期設定 :
第 1 マシン軸 ... X
第 2 マシン軸 ... Y
第 3 マシン軸 ... Z
最小入力リミット : 1 文字
最大入力リミット : アルファベットで
始まる 1 ~ 15 文字
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1.1
意味 :
マシン軸の名称はこの MD に入力されます
例外,エラー ,
• 入力されたマシン軸名はその名称とジオメトリ軸 (MD 20060:
AXCONF_GEOAX_NAME_TAB, MD 20050: AX-CONF_GEOAX_ASSIGN_TAB)
およびチャンネル軸 (MD 20080: AXCONF_CHANAX_NAME_TAB, MD 20070:
AXCONF_MACHAX_USED) の割当てが一致しなければならない。
• 入力されたマシン軸名は入力された Euler 角 (MD 10620:
EULER_ANGLE_NAME_TAB) の名称,方向ベクトル (MD 10640:
DIR_VECTOR_NAME_TAB) 用に指定された名称,CIP (MD 10660:
INTERMEDIATE_POINT_NAME_TAB) に関する中間点座標に与えられた名称
および補間パラメータ の名称 (MD 10650: IPO_PARAM_NAME_TAB) と重複し
てはならない。
• 入力されたマシン軸名を次の予約アドレス文字に用いてはならない。
- D ツールオフセット (D 機能 ) - E 予約
- F フィードレート (F 機能 ) - G 予約の機能
- H 補助機能 (H 機能 )
- L サブプログラムコール
- M 種々の機能 (M 機能 ) - N サブロック
- P パスのサブプログラム番号
- R 演算パラメータ
- S スピンドル速度 (S 機能 ) - T ツール (T 機能 )
• 予約語 ( 例えば DEF, SPOS) および あらかじめ定義された識別子 ( 例えば
ASPLINE, SOFT) も使用できない。
• 任意の数値範囲 (1 ~ 99) を伴う有効なアドレス文字 (A, B, C, I, J, K, Q, U, V, W,
X, Y, Z) からなる軸名称の使用は一般的な名称よりもわずかによいブロックサ
イクルタイムをもたらす。
• マシン軸の名称を付けない場合,あらかじめ定義された名称が適用される
("AXn" n 番目のマシン軸)
関連性
MD 20060: AXCONF_GEOAX_NAME_TAB
(チャンネル中のジオメトリ軸の名称 [GEO axis no.])
MD 20080: AXCONF_CHANAX_NAME_TAB
(チャンネル中のチャンネル軸の名称 [channel axis no.])
1-587
10600
MD 番号
FRAME_ANGLE_INPUT_MODE
フレームによる回転用の入力タイプ
初期設定 : 1
最小入力リミット : 1
最大入力リミット : 2
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
2 つ以上の回転がブロックにプログラムされる場合に,
FRAME_ANGLE_INPUT_MODE は 3 つのジオメトリ軸のまわりの回転 (ROT
および AROT) の特性を確定するために設定されます。これらの回転がブロッ
ク内にプログラムされる順序は関連性がありません。回転の計算は次の方法
で設定できます。
• FRAME_ANGLE_INPUT_MODE を有する Euler 角 = 2 ( 図 1.100 を参照
)Euler 角に従う回転の計算は次の順序で実行されます。
1. Z 軸中心の回転 (ROT Z ...)
2. X 軸中心の回転 (ROT X ...)
3. Y 軸中心の回転 (ROT Y ...)
• FRAME_ANGLE_INPUT_MODE を有する RPY = 1 ( 図 1.101 を参照 ):
RPY に従う回転の計算は次の順序で実行されます。
1. Z 軸中心の回転 (ROT Z ...)
2. Y 軸中心の回転 (ROT Y ...)
3. X 軸中心の回転 (ROT X ...)
図 1.100 および 1.101 より
Z 軸中心の回転
X’ 軸中心の回転
Z’’ 軸中心の回転
Y’ 軸中心の回転
X’’ 軸中心の回転
Euler 角に従う回転
Z 軸中心の回転
RPY に従う回転
例外,エラー ,
パートプログラムが制御に基づく回転によりプログラムされる場合(ワーク
準備,および/またはポストプロセッサではなく),ジーメンスが RPY 設定
を提示します。FRAME_ANGLE_INPUT_MODE = 0 は 1 に対応します。
参照
YS840DI ユーザーズマニュアル・プログラミング編
1-588
10610
MD 番号
MIRROR_REF_AX
ミラーリング (MIRROR) フレーム用の基準軸
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 3
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1 または 5.1
意味 :
SW 1.1 以降
一定の軸 (X) を中心にしたミラーリング (MIRROR および AMIRROR) は常に
以下にマップすることができます。
• 特定の軸 (X) でのミラーリング
• 別の軸でのミラーリング (Y) および他の軸 (Y) での回転
• 2軸 (X and Y) での回転
制御中のミラーリング機能は常に特定の手順によりシステム変数および表示
区画にマップされます。プログラムされたミラーリング機能 (MIRROR and
AMIRROR) は常に定義された基準軸を基準にします。プログラムされたミ
ラーリング機能が基準軸を中心にミラーリングを実行するか他の軸を中心に
行うかは関係ありません。基準軸は常に 3 つのジオメトリ軸の 1 つでなけれ
ばなりません。
図
X 軸まわりのミラーリング
ミラー X
表示:
ROT MIRRO
X
0
1
Y
0
0
Z
0
0
( ミラー化 )
Z 軸まわりのミラーリング
ミラー Z
( ミラー化 )
表示:
TRANS ROT SCALE MIRROR
X
0
1
0
1
Y
0
180
0
0
Z
0
0
0
0
1-589
10610
MD 番号
MIRROR_REF_AX
ミラーリング (MIRROR) フレーム用の基準軸
SW 5.1 以降
0: 正規化されていないミラーリング。ミラーリングは常に特定の軸で実行さ
れる。
1, 2, 3: 正規化されたミラーリング :
ジオメトリ軸のミラーリングは常に定義された基準軸を基準にできる。
1: X はミラーリング用の基準軸です。
X 軸のミラーリングは固有です。
Y 軸のミラーリングは以下にマップされます。
X 軸ミラー
Z 軸の 180°の回転
Z 軸のミラーリングは以下にマップされます。
X 軸ミラー
X 軸の 180°の回転
Z 軸の 180°の回転
2: Y はミラーリング用の基準軸です。
X 軸のミラーリングは以下にマップされます。
A Y 軸ミラー
Z 軸の 180°の回転
Y 軸のミラーリングは固有です。
Z 軸のミラーリングは以下にマップされます。
Y 軸ミラー
X 軸の 180°の回転
3: Z はミラーリングの基準軸です。
X 軸のミラーリングは以下にマップされます。
Z 軸ミラー
Z 軸の 180°の回転
X 軸の 180°の回転
Y 軸のミラーリングは以下にマップされます。
Z 軸ミラー
X 軸の 180°の回転
Z 軸のミラーリングは固有です。
10612
MD 番号
MIRROR_TOGGLE
ミラートグル
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : CHAR
適用開始 SW バージョン : 5.1
意味 :
1: プログラムされた軸値は測定されません。トグルスイッチ応答 : コマ
ンド "MIRROR X0" がその機能を有効にします。その次の "MIRROR
X0" がその機能を再び無効にします。
0: プログラムされた軸値は常に測定されます。
<Wert> ≠ 0 ミラーリングが実行されていない場合,軸のミラーリン
グが実行します。
<Wert> = 0 ミラーリングが無効です。
1-590
10613
MD 番号
NCBFRAME_RESET_MASK NCU
グローバルフレームの RESET 応答
初期設定 : 0xFF
最小入力リミット : 0
最大入力リミット : 0xFF
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5.1
意味 :
チャンネル内で計算された NCU グローバルフレームのリセット応答用ビット
マスク
次が適用されます。
Bit 0 = 1 および 14 = 1 (MD20110 RESET_MODE_MASK)
リセット時の完全基本フレームはビットがビットマスクにおいて 1
であるすべての NCU グローバル基本フレーム配列要素を結合するこ
とにより形成されます。
Bit 0 = 1 および 14 = 0 (MD20110 RESET_MODE_MASK)
完全基本フレームはリセットにより選択されません。
10650
MD 番号
IPO_PARAM_NAME_TAB
補間パラメータの名称
初期設定 : I, J, K
最小入力リミット : -
最大入力リミット : -
変更が有効になるための条件 :
電源オン
保護レベル : 2 / 7
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1
意味 :
補間パラメータの名称のリスト
軸の名称用に $MC_AXCONF_CHANAX_NAME_TAB で定義されたルールは
補間パラメータの名称の選択に適用されます。名称はそれぞれが他の名称
(軸,Euler 角,標準ベクトル,方向ベクトル,補間パラメータ)と重ならな
いように選択する必要があります。
関連性
INTERMEDIATE_POINT_NAME_TAB
参照
PA
10660
MD 番号
INTERMEDIATE_POINT_NAME_TAB
G2/G3 用中間点座標の名称
初期設定 : I1, J1, K1
最小入力リミット : -
変更が有効になるための条件 : 電 保護レベル : 2/7
源オン
最大入力リミット : 単位 :
データタイプ : STRING
適用開始 SW バージョン : 1
意味 :
中間ポイント座標の名称のリスト
軸の名称用に $MC_AXCONF_CHANAX_NAME_TAB に定義された規則が中間
点座標の名称の選択に適用されます。その名称はそれらが他の名称(軸,
Euler 角,標準ベクトル,方向ベクトル,補間パラメータ)と同じにならない
ように選択する必要があります。
関連性
IPO_PARAM_NAME_TAB
参照
PA
1-591
18600
MD 番号
MM_FRAME_FINE_TRANS
すべての設定可能な FRAMES および基本フレーム用オフセット(微)
初期設定 : 1
最小入力リミット : 0
変更が有効になるための条件
保護レベル : 0/0
電源オン ; SRAM は変更にフォー
マットされます。
最大入力リミット : 1
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 4.3
意味 :
1: 設定可能なフレーム用オフセット(微); 基本フレームの定義は MMC
よる入力またはプログラムを介して可能になります。
0: オフセット(微)は入力またはプログラムできません。オフセット
(微)の停止は最大 10KB SRAM (MD 28080 MM_NUM_USER_FRAMES
による ) まで保存されます。
関連性
参照
PA
18601
MD 番号
MM_NUM_GLOBAL_USER_FRAMES
グローバルにあらかじめ定義されたユーザフレームの番号
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 100
変更が有効になるための条件
電源オン ; SRAM が変更されま
す。
保護レベル : 0/0
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5.1
意味 :
[Value]: 値はあらかじめ定義された配列 $P_UIFR[ ] 用の配列要素の数で
ある。
[Value] > 0: すべての設定可能なフレームはグローバルである。この場合,
MD28080 MM_NUM_USER_FRAMES は無視される。バッテリ
バックアップ付のメモリはこの目的のために確保される。
関連性
参照
18602
MD 番号
MM_NUM_GLOBAL_BASE_FRAMES
グローバル基本フレームの番号
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 8
変更が有効になるための条件
電源オン ; SRAM は変更時に
フォーマットされる
保護レベル : 0/0
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5.1
意味 :
[Value]: 値はあらかじめ定義された配列 $P_NCBFR[ ] 用配列要素の数
である。バッテリバックアップ付のメモリがこの目的のため
に確保される。
関連性
参照
1-592
システム変数
$AA_ETRANS[X]
$AA_ETRANS[X] は DOUBLE 型の軸別システム変数です。この変数のシステムの
初期設定は 0 です。ユーザにより設定された値は IS "External zero offset" (DB31-48,
DBX3.0) により起動します。
$P_PFRAME
$P_IFRAME
$P_BFRAME
$P_UIFR [ ]
$P_UIFRNUM
$P_UBFR
$P_ACTFRAME
SW 5.1 以降:
$P_CHBFR[n] ( チャンネル中の基本フレーム,G500, G54 ~ G599 後に起動 )
$P_CHBFRAME[n] ( チャンネル中の現在の基本フレーム )
$P_NCBFR[n] (NCU グローバル基本フレーム,G500, G54 ~ G599 後に起動 )
$P_NCBFRAME[n] ( 現在の NCU グローバル基本フレーム )
$P_ACTBFRAME ( 現在の連結された完全な基本フレーム )
$P_NCBFRMASK (NCU グローバル基本フレームの定義用のビットマスク )
$P_CHBFRMASK ( チャンネル別基本フレームの定義用のビットマスク )
PGA, Programming Guide, Advanced, Chapter 6 Frames を参照してください。
1-593
■ チャンネル別マシンデータ
■ 軸/座標系
20050
MD 番号
AXCONF_GEOAX_ASSIGN_TAB
系列軸へのジオメトリ軸の割当て
初期設定 :
第 1 ジオメトリ軸 ... 1
第 2 ジオメトリ軸 ... 2
第 3 ジオメトリ軸 ... 3
最小入力リミット : 0
(0 はジオメトリ軸が系列軸に割当て
られないことを意味します。)
最大入力リミット :
7
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
この MD でジオメトリ軸を割当てる系列軸番号を指定できます。割当てはす
べてのジオメトリ軸について系列別に行われます。ジオメトリ軸に割当てが
おこなわれなければ,ジオメトリ軸は存在せず,プログラムすることができ
ません(AXCONF_GEOAX_NAME_TAB で定義した名称を用いてプログラム
できない)
。
注 : 系列軸は連続する昇順でジオメトリ軸に割当てる必要があります。
例外,エラー ,
(3 つの)ジオメトリ軸を最初の 3 つの系列軸に割当てることをお勧めします。
1-594
20060
MD 番号
AXCONF_GEOAX_NAME_TAB
系列内のジオメトリ軸の名称
初期設定 :
第 1 ジオメトリ軸 ... X
第 2 ジオメトリ軸 ... Y
第 3 ジオメトリ軸 ... Z
最小入力リミット :1 文字
最大入力リミット :
アルファベットで始まる 16 文字
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1.1
意味 :
この MD では,系列用の 3 つのジオメトリ軸の名称は別々に入力されます。
ジオメトリ軸はここで特定した名称を用いてパートプログラム内でプログラ
ムできます。
例外,エラー
• 特定されたジオメトリ軸の名称は機械軸および系列軸の名称,割当てで矛
盾してはなりません。
• 入力した機械軸の名称は Euler 角 (MD 10620: EULER_ANGLE_NAME_TAB)
用に入力した名称,方向ベクトル (MD 10640: DIR_VECTOR_NAME_TAB)
を特定した名称,CIP (MD 10660: INTERMEDIATE_POINT_NAME_TAB) の
場合に中間点座標に与えた名称および補間パラメータ (MD 10650:
IPO_PARAM_NAME_TAB) の名称と,同じであってはなりません。
• ジオメトリ軸の名称は次の予約アドレス文字を用いてはなりません。
- D ツールオフセット (D 機能 ) - E 予約
- F フィードレート (F 機能 ) - G 予約機能
- H 補助機能 (H 機能 ) - L サブプログラム呼出し
- M 種々の機能 (M 機能 )
- N サブブロック
- P パスのサブプログラム番号 - R 計算パラメータ
- S スピンドル速度 (S 機能 ) - T ツール (T 機能 )
• 名称はキーワード(たとえば DEF, SPOS など)およびあらかじめ定義され
た名称(たとえば,ASPLINE, SOFT など)を入れてはなりません。
• 任意の数字(1-99) を付けた有効アドレス文字 (A, B, C, I, J, K, Q, U, V, W, X, Y,
Z) からなる軸名称を用いると一般的な名称よりもブロックのサイクルタイ
ムがわずかによくなります。
• 全く同じ異なる名称が系列で割当てられたジオメトリ軸に与えられること
があります。
関連性
MD 10000: AXCONF_MACHAX_NAME_TAB
( 機械軸名 [axis no.])
MD 20080: AXCONF_CHANAX_NAME_TAB
( 系列内の系列軸名 [channel axis no.])
1-595
20070
MD 番号
AXCONF_MACHAX_USED
系列内で有効な機械軸名
初期設定 :
第 1 チャンネル軸 ... 1
第 2 チャンネル軸 ... 2
第 3 チャンネル軸 ... 3
それ以降のチャンネル軸 ... 0
最小入力リミット : 0
(0 ジオメトリ軸がチャンネル軸に割
当てられないことを意味します。)
最大入力リミット :
14
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 1.1
意味 :
MD が系列軸/特殊軸に機械軸を割当てます。その割当てはすべての系列軸
について系列別に実行されます。
SW バージョン 5 以降では,構成に一貫性をもたせるために,系列軸に機械軸
をを割当てないことがあります。この場合には,MD は系列軸用に -1 に設定
されます。
SW バージョン 5 では,AXCONF_CHANAX_NAME_TAB により作られた機械
軸を基準にはしません。しかし MD 10002:
$MN_AXCONF_LOGIC_MACHAX_TAB によって定義された論理機械軸イ
メージを基準にします。
系列軸に割当てられない機械軸はアクティブではありません。すなわち,軸
制御が計算されず,その軸は表示されませんし,系列内でプログラムできま
せん。
例外,エラー
• すべてのジオメトリ軸はプログラムできるように系列軸および機械軸に割
当てる必要があります。
• AXCONF_MACHAX_USED によって,機械軸がいくつかのチャンネルに割
当てられる場合,軸がプログラムされる系列数を MD 30550:
AXCONF_ASSIGN_MASTER_CHAN に入力する必要があります。
• 入力のリストは SW バージョン 4 まではギャップを含んでいてはなりませ
ん。使用される軸はギャップを含んでいてもかまいません ( SW 5 について
は上記を参照 )。
例:
以下は許される :
AXCONF_MACHAX_USED [0] = 3; 第 3 MA はチャンネル内の第 1 軸
AXCONF_MACHAX_USED [1] = 1; 第 1 MA はチャンネル内の第 2 軸
AXCONF_MACHAX_USED [2] = 5; 第 5 MA はチャンネル内の第 3 軸
AXCONF_MACHAX_USED [3] = 0
以下は誤り :
AXCONF_MACHAX_USED [0] = 1; 第 1 MA は チャンネル内の第 1 軸
AXCONF_MACHAX_USED [1] = 2; 第 2 MA は チャンネル内の第 2 軸
AXCONF_MACHAX_USED [2] = 0; リスト上のギャップ
AXCONF_MACHAX_USED [3] = 3; ... チャンネル軸の
チャンネル内で起動された軸の場合,軸名称は
AXCONF_CHANAX_NAME_TAB の対応する区画に割当てる必要があります。
アプリケーション例
この MD は 「軸/スピンドル交換」の機能用の系列において使用し交換でき
る軸を定義します。
関連性
MD 30550: AXCONF_ASSIGN_MASTER_CHAN
( 乗り入れ用系列の初期設定 )
MD 20080: AXCONF_CHANAX_NAME_TAB
( 系列内での系列軸 [channel axis no.])
MD 10002: AXCONF_LOGIC_MACHAX_TAB
1-596
20 080
MD 番号
AXCONF_CHANAX_NAME_TAB
系列内での系列軸の名称/特殊軸の名称
初期設定 :
第 1 マシン軸 ... X1
第 2 マシン軸 ... Y1
第 3 マシン軸 ... Z1
最小入力リミット :
1 文字またはスペース
最大入力リミット :
アルファベットで始まる 1 ~ 15 文字
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : STRING
適用開始 SW バージョン : 1.1
意味 :
YS840DI は 7 つの系列軸を有します。この MD でチャンネル軸/特殊軸の名
称を設定できます。最初の3つのチャンネル軸が常に3つの割当てられたジ
オメトリ軸で占められます( MD 20050: AXCONF_GEOAX_ASSIGN_TAB を
参照)
。残りの系列軸は特殊軸に指定されます。系列軸/特殊軸は常にこの
MD で設定した名称をもつワーク座標系のスクリーン上に表示されます。
例外,エラー
• 指定したチャンネル軸の名称/特殊軸の名称はマシン軸およびジオメトリ
軸に指定され割当てられた名称と矛盾してはなりません。
• 指定されたチャンネル軸の名称は ,
(MD 10620: EULER_ANGLE_NAME_TAB), 方向ベクトル用に指定された名称
(MD 10640: DIR_VECTOR_NAME_TAB), CIP (MD 10660:
INTERMEDIATE_POINT_NAME_TAB) の場合の中間ポイント座標に与えられ
た名称および補間パラメータ (MD 10650: IPO_PARAM_NAME_TAB) の名称
Euler 角用に入力された名称と矛盾してはなりません。
• チャンネル軸の名称は以下の予約のアドレス文字を加えてはなりません。
- D ツールオフセット (D 機能 ) - E 予約
- F フィードレート (F 機能 ) - G 予約の機能
- H 補助機能 (H 機能 ) - L サブプログラム呼出し
- M 種々の機能 (M 機能 )
- N サブブロック
- P パスのサブプログラム番号 - R 計算パラメータ
- S スピンドル速度 (S 機能 ) - T ツール (T 機能 )
• その名称はキーワード(DEF, SPOS など)およびあらかじめ定義された名
称(たとえば,ASPLINE, SOFT )を入れてはなりません。
• 任意の数字(1-99 )を伴う有効なアドレス文字 (A, B, C, I, J, K, Q, U, V, W,
X, Y, Z) で構成される軸名称の使用により一般の名称よりわずかにブロック
サイクルタイムが良くなります。
• ジオメトリ軸が割当てられた系列軸(最初の 3 つのチャンネル軸)につい
てはこの MD に特別な名称を入力してはなりません。
22532
MD 番号
GEOAX_CHANGE_M_CODE
ジオメトリ軸の交換用 M コード
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 99999999
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 4
意味 :
M コードの番号はジオメトリ軸が交換される時 VDI インタフェースに出力さ
れます。
マシンデータの値を 0 から 6, 17, 30 うちの1つに設定する場合,M コードは
出力されません。監視機能は この方法で生じた M コードが他の機能と重複す
るかどうかのチェックは行いません。
1-597
28081
MD 番号
MM_NUM_BASE_FRAME
系列別基本フレームの番号
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 8
変更が有効になるための条件 :
電源オン
保護レベル : 2 / 7
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5.1
意味 :
[Value]: その値はあらかじめ定義した配列 $P_CHBFR[ ] 用の配列要素の数
です。バッテリバックアップ付のメモリがこの目的のために確保
されます。
24000
MD 番号
FRAME_ADD_COMPONENTS
追加したプログラム可能なフレーム要素のプログラミング/変更の分離
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BOOL
適用開始 SW バージョン : 5.1
意味 :
0: ATRANS によりプログラムされた相対的な追加の変換は絶対変換
(TRANS によりプログラムされる)とともにフレームに保存されます。
1: 相対的な変換のすべてがプログラム可能なフレームのオフセットに
保存されます。絶対及び相対変換は互いに無関係に変更されます。
G58, G59 は 実行可能です。
24002
MD 番号
CHBFRAME_RESET_MASK
系列別基本フレームのリセット応答
初期設定 : 0xFF
最小入力リミット : 0
最大入力リミット : 0xFF
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : INT
適用開始 SW バージョン : 5.1
意味 :
系列内で計算された系列別基本フレームのリセット応答用のビットマスク
以下が適用されます。
Bit 0 = 1 および 14 = 1 (MD 20110 RESET_MODE_MASK)
リセットの完全基本フレームは 1 でマスクである系列別基本フレー
ム配列要素すべてを結合することにより形成されます。
Bit 0 = 1 および 14 = 0 (MD 20110 RESET_MODE_MASK)
完全基本フレームはリセットにより選択されません。
1-598
■ ワーク関連の実際値系
20110
MD 番号
RESET_MODE_MASK
Reset による制御システムの初期設定の定義
初期設定 : 0x0, 0x0, ...
最小入力リミット : 0
最大入力リミット : 0x3FFF
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : DWORD
適用開始 SW バージョン : 2.0
意味 :
電源オンおよびリセット/プログラムエンド後,次のビットを設定すること
により行われる G コード(特に,平面設定および設定可能なオフセット),
ツール長補正および座標変換に関する制御の初期設定の定義
Bit 0: (LSB) リセットモード
Bit 1: 補助機能無視 ツール選択出力
Bit 2: 電源オン 後のリセット応答の選択(たとえば,ツールオフセット)
Bit 3: 選択されているツールオフセットを基準にしたテストモード終了後の
リセット応答の選択 ビット 0 および 6 が有効である場合のみ,その
ビットが関係します。それは「アクティブなツール長補正」が何を基
準にしているかを定義します。
- テストモードエンド時にアクティブなプログラム
- テストモードがスイッチオンされる前にアクティブであったプログラ
ム
Bit 4: SW 4.4 までのリセット応答 G コード「現在の平面」; SW 5 以降で未
使用,MD 20152: GCODE_RESET_MODE にて設定
Bit 5: SW 4.4 までリセット応答 G コード「原点オフセット」; SW 5 で未使
用,MD 20152: GCODE_RESET_MODE にて設定
Bit 6: リセット応答「ツール長補正有効」
Bit 7: リセット応答「キネマティックス変換有効」
Bit 8: リセット応答「結合モーション軸」
Bit 9: リセット応答「接線方向の補正」
Bit 10: リセット応答「主軸同期」
Bit 11: リセット応答「mm/rev」
Bit 12: リセット応答「ジオメトリ軸交換」
Bit 13: リセット応答「ガイド値結合」
Bit 14: リセット応答「Basic frame」
Bits 4 から 14 は bit 0 = 1 である場合にだけ,有効となります。残りのビット
は割当てられません。
それぞれのビットの意味
Bit 0 = 0 : 電源投入後の初期設定 SW 1 の応答に一致
- MD 20150: GCODE_RESET_VALUES に従う G コード
- ツール長補正無効
- キネマティックス変換無効
- 結合モーショングループ無効
- フォローアップ無効
- プログラム可能主軸同期無効
- mm/rev モードオフ
- MD 20050 に従うジオメトリ軸の割当て
- ガイド値カップリング無効
- 基本フレーム無効
1-599
20110
MD 番号
意味 :
RESET_MODE_MASK
Reset による制御システムの初期設定の定義
リセットまたはプログラムエンドの初期設定 :
現在の設定が保持されます。
その次のパートプログラムスタートにより,次のリセット状態が実行され
ます。
- MD 20150: GCODE_RESET_VALUES に従う G コード
- ツール長補正無効
- キネマティクス変換無効
- 結合モーショングループ無効
- フォローアップ無効
- プログラム可能な主軸同期無効
- mm/rev モードオフ
- MD 20050 に従うジオメトリ軸の割当て
- ガイド値カップリング 無効
- 基本フレーム無効
Bit 0 = 1: 電源投入後の初期設定
- MD 20150: GCODE_RESET_VALUES に従う G コード
- MD 20120: TOOL_RESET_VALUE および MD 20130:
CUTTING_EDGE_RESET_VALUE に従うツール長補正有効
bit 2 =1 および bit 6 = 1 の場合,TLC は 電源オン でアクティブ
- MD 20140: TRAFO_RESET_VALUE に従うキネマティクス変換有効
- 結合モーショングループ 無効
- フォローアップ無効
- プログラム可能な主軸同期無効
- mm/rev モードオフ
- MD 20050 に従うジオメトリ軸の割当て
- ガイド値結合無効
- 基本フレーム無効
Bit 0 = 1: リセットまたはプログラムエンドによる初期設定
RESET_MODE_MASK の設定に基づいて,bits 4 から 14 までは,現在
の設定が保持されるか , または MD に保存された初期設定が以下のた
めに設定されます。
- 現在の平面
- 原点オフセット
- ツール長補正
- キネマティクス変換
8 と 9 に基づいて現在の結合モーション軸の設定および接線方向に補
正された軸が停止または保持されます。主軸同期リンクの設定は MD
21330:COUPLE_RESET_MODE_1 の設定に基づき,選択されません。
主軸同期リンク設定されない場合 , bit 10 に基づき,リンクは無効ま
たは保持されます。bit 14 に基づき,基本フレームは保持されるかま
たは選択されません。
Bit 1 = 0: MD 20120: TOOL_RESET_VALUE, MD 20130: CUTTING_EDGE_RESET_VALUE, MD 20121: TOOL_PRESEL_RESET_VALUE および
MD22550: TOOL_CHANGE_MODE に従って,ツール選択時に,PLC
に補助機能 (D, T, M) が出力される。ツールマネジメント機能がアク
ティブである場合,bit 1 は意味を持ちません。
1-600
20110
MD 番号
RESET_MODE_MASK
Reset による制御システムの初期設定の定義
Bit 1 = 1: 補助機能無視がツール選択により PLC に出力される。ツールマネジ
メント機能が有効である場合,bit 1 は意味を持ちません。
Bit 2 = 0: 電源オン 後にツールオフセットが無効です ( ツールマネジメントが
アクティブの場合,実行されません )。
Bit 2 = 1: bit 0 および bit 6 = 1 である場合 , 最新のアクティブなツールのオフ
セットが有効となります ( ツールマネジメントがアクティブの場合,
実行されません )。
Bit 3 = 0: テストモードエンド : 「アクティブなツール長補正の現在の設定が保
持されます」(bits 0 および 6 で有効 ) はテストモードの起動前にアク
ティブであったプログラムを基準にします。
Bit 3 = 1: テストモードエンド : 「アクティブなツール長補正の現在の設定は保
持されます」(bits 0 および 6 で有効 ) テストモードエンド時にアク
ティブであったプログラムを基準にします。
Bit 4 = 0: SW 4.4 まで : リセット/パートプログラムエンドで MD 20150:
GCODE_RESET_VALUES を G コード「現在の平面」の初期設定しま
す。SW 5 以降では,MD 20152: GCODE_RESET_MODE を設定します。
Bit 4 = 1: SW 4.4 まで : G コード「現在の平面」の現在の設定がリセット/
パートプログラムエンドで保持されます。SW 5 以降では,MD 20152:
GCODE_RESET_MODE を設定します。
Bit 5 = 0: SW 4.4 まで : MD 20150: GCODE_RESET_VALUES に従うリセット/
パートプログラム後に G コード「設定可能な原点オフセット」の初
期設定 ; SW 5 以降では,MD 20152: GCODE_RESET_MODE を設定し
ます。
Bit 5 = 1: SW 4.4 まで : G コード「設定可能な原点オフセット」はリセット/
パートプログラムエンドで保持されます ; SW 5 以降では,MD
20152: GCODE_RESET_MODE を設定します。
Bit 6 = 0: MD 20120: TOOL_RESET_VALUE および MD 20130:
CUTTING_EDGE_RESET_VALUE によるパートプログラムに従うア
クティブなツール長補正の初期設定 ;
MD 22550: TOOL_CHANGE_MODE=1 の場合 ,
MD 20121: TOOL_PRESEL_RESET_VALUE で指定されたツールがあ
らかじめ選択されます。ツールマネジメント機能がアクティブであ
る場合,MD 20120 は用いられず,かわりに MD 20122:
TOOL_RESET_NAME が用いられます。
Bit 6 = 1: アクティブなツール長補正も現在の設定はリセット/パートプログ
ラムで保持されます。
Bit 7 = 0: MD 20140: TRAFO_RESET_VALUE に従うリセット/パートプログラ
ムエンド後有効な変換の初期設定。
Bit 7 = 1: 有効な変換の現在の設定はリセット/パートプログラムエンドおよ
びパートプログラムスタート後,保持されます。
Bit 8 = 0: 結合モーショングループはリセット/パートプログラムエンド後,
無効となります。
Bit 8 = 1: 結合モーショングループはリセット/パートプログラムエンド後も
有効となります。
Bit 9 = 0: 接線方向の補正はリセット/プログラムエンドで無効になります。
Bit 9 = 1: 接線方向の補正はリセット/パートプログラムエンド後,保持され
ます。
Bit 10 = 0: 主軸同期設定はリセット/パートプログラムエンドにより起動され
ます。
Bit 10 = 1: 主軸同期設定はリセット/パートプログラムエンドによりアクティ
ブです。
1-601
20110
MD 番号
RESET_MODE_MASK
Reset による制御システムの初期設定の定義
Bit 11 = 0: リセット/パートプログラムエンドで,すべての軸/主軸の MD
43300: ASSIGN_FEED_PER_REV_SOURCE は 0 に再設定します。
すなわち,移動はすでに mm/rev モードではありません,パス軸お
よび同期軸の設定はマスタスピンドルに再設定されます(初期設
定)。
Bit 11 = 1: mm/rev モードの現在の設定はリセット/パートプログラムエンド
後,保持されます。パートプログラムスタートを用いて,設定デー
タ MD 43300: ASSIGN_FEED_PER_REV_SOURCE は 0 に設定され
ます。すなわち,移動はすでに mm/rev モードではありません,そ
してパス軸および同期軸はマスタスピンドルに再設定されます(初
期設定)。
Bit 12 = 0: マシンデータ $MC_GEOAX_CHANGE_RESET が与えられる場合,
変更されたジオメトリ軸の割当てはリセット またはパートプログ
ラムによりクリアされます。マシンデータで定義されたジオメトリ
軸の割当ての初期設定が有効になります。
Bit 12 = 1: 変更されたジオメトリ軸の割当ては RESET/ パートプログラムエン
ド後も有効です。
Bit 13 = 0: マスタ/スレーブ結合を RESET/ パートプログラムにより無効にな
ります。
Bit 13 = 1: マスタ/スレーブ結合は RESET/ パートプログラム後も有効です。
Bit 14 = 0: 基本フレームは選択されません。
Bit 14 = 1: 基本フレームの現在の設定は保持されます。
MD 20120: TOOL_RESET_VALUE ( 電源投入時(またはリセット/加工プログ
ラム終了時)工具長補正が割当てられるツール。)
MD 20130: CUTTING_EDGE_RESET_VALUE ( 電源投入時(またはリセット/
加工プログラム終了時)工具長補正が割当てられる切削刀。)
MD 20150: GCODE_RESET_VALUES (G グループの初期設定 [G group no.])
関連性
MD 20152: SW 5 以降では,G コードに関する MD 20110 の拡張
MD 20140: TRAFO_RESET_VALUE ( 電源 ON 中に選択される変換データ設定
(Reset/ パートプログラムエンド )
MD 20112: START_MODE_MASK ( 電源 ON 後と Reset による制御システム初
期設定の定義)
MD 20118: GEOAX_CHANGE_RESET ( 自動ジオメトリ変更可能 )
MD 43300: ASSIGN_FEED_PER_REV_SOURCE (Positioning /スピンドルの
mm/rev)
MD 20050: AXCONF_GEOAX_ASSIGN_TAB ( ジオメトリ軸および系列軸間の
割当て)
重要
ツール管理機能が用いられる場合,MD 20310 TOOL_MANAGEMENT_MASK
のビット 14 が設定される必要があります。
20112
MD 番号
START_MODE_MASKNC
初期設定 : 0x400,0x400,
最小入力リミット : 0
最大入力リミット : 0x7FFF
変更が有効になるための条件 :
保護レベル : 1/1
単位 :
スタート時,電源オン後,およびリセット時の制御初期設定の定義
電源オン
データタイプ : DWORD
適用開始 SW バージョン : 4.3
1-602
20112
START_MODE_MASKNC
MD 番号
スタート時,電源オン後,およびリセット時の制御初期設定の定義
意味 :
G コード(特に有効な平面および有効な有効な原点オフセット)
,有効なツー
ル長補正,変換および軸結合に関するパートプログラムスタート時の制御基
本設定の定義(以降のビットをセットすることによって)
:
Bit 0:
割当てられていません。START_MODE_MASK はパートプログラム
がスタートするたびに評価されます。
Bit 1 = 0: 補助機能(D, T, M)は , 以下に従うツール選択により PLC に出力さ
れる :
MD 20120: TOOL_RESET_VALUE
MD 20130: CUTTING_EDGE_RESET_VALUE
MD 20121: TOOL_PRESEL_RESET_VALUE
MD 22550: TOOL_CHANGE_MODE
ツールマネジメントが有効の場合は実行されません。
Bit 1 = 1: 補助機能無効。ツール選択により PLC に出力。
ツールマネジメントが有効の場合は実行されません。
Bit 2
割当てられません ( 予約 )。
Bit 3
割当てられません ( 予約 )。
Bit 4 = 0: G コードの「現在の平面」用の現在の設定は保持されます。
Bit 4 = 1: MD 20150: GCODE_RESET_VALUES に従う 「現在の平面」G コード
の基本設定
Bit 5 = 0: 「原点オフセット」G コードの現在の設定は保持されます。
Bit 5 = 1: MD 20150: GCODE_RESET_VALUES に従う G コード「原点オフセッ
ト」の基本設定
Bit 6 = 0: ツール長補正の現在の設定はパートプログラムに保持されます。
Bit 6 = 1: MD 20120: TOOL_RESET_VALUE および MD 20130:
CUTTING_EDGE_RESET_VALUE に従う有効なツール長補正の基本
設定。MD 22550: TOOL_CHANGE_MODE=1 のとき , MD 20121:
TOOL_PRESEL_RESET_VALUE で特定されたツールもあらかじめ選
択されます。ツールマネジメント機能が有効である場合,MD 20120
は用いられず,かわりに MD 20122: TOOL_RESET_NAME が用いら
れます。
Bit 7 = 0: 有効な変換の現在の設定は保持されます。
Bit 7 = 1: MD 20140: TRAFO_RESET_VALUE に従う有効な変換の基本設定
Bit 8 = 0: 結合軸グループは保持されます。
Bit 8 = 1: 結合軸グループは分けられます。
Bit 9 = 0: 接線方向のフォローアップは有効なままです。
Bit 9 = 1: 接線方向の補正は停止されます。
Bit 10 = 0: 非設定主軸同期リンクはアクティブなままです。
Bit 10 = 1: 非設定主軸同期リンクは停止されます。
Bit 11
割当てられません ( 予約 )。
Bit 12 = 0: 変更されたジオメトリ軸の割当てはパートプログラム上で有効なま
まです。
Bit 12 = 1: 変更されたジオメトリ軸の割当ては MD 20118
GEOAX_CHANGE_RESET に基づいてパートプログラム上で削除さ
れます。
Bit 13 = 0: マスタ/スレーブカップリングはアクティブなままです。
Bit 13 = 1: マスタ/スレーブカップリングは分けられます。
Bit 14:
予約 ( スタート応答「基本フレーム」)
1-603
20112
START_MODE_MASKNC
MD 番号
スタート時,電源オン後,およびリセット時の制御初期設定の定義
関連性
MD 20050: AXCONF_GEOAX_ASSIGN_TAB ( ジオメトリ軸および系列軸間の
割当て )
MD 20110: RESET_MODE_MASK ( リセット/パートプログラムエンド後の制
御システム初期設定の定義 )
MD 20118: GEOAX_CHANGE_RESET ( リセット/パートプログラムエンド/
パートプログラムスタートによるジオメトリ軸の構成 )
MD 20120: TOOL_RESET_VALUE ( 割当てられた工具長補正がパワーアップ中
選択される工具 (Reset /パートプログラムエンド/パートプログ
ラムスタート )
MD 20121: TOOL_PRESEL_RESET_VALUE ( 工具長補正がパワーアップ中選
択されるあらかじめ選択される工具 ( リセット/パートプログラム
エンド/パートプログラムスタート )
MD 20122: TOOL_RESET_NAME ( パワーアップ中に選択される工具長補正の
定義 ( リセット/パートプログラムスタート )
MD 20124: TOOL_MANAGEMENT_TOOLHOLDER ( ツールホルダ番号 )
MD 20130: CUTTING_EDGE_RESET_VALUE ( パワーアップ中選択される工具
長補正が割当てられた切削刃(リセット/パートプログラムエンド
)
MD 20140: TRAFO_RESET_VALUE ( パワーアップ中選択される変換データ設
定 ( リセット/パートプログラムエンド/パートプログラムスター
ト)
MD 20150: GCODE_RESET_VALUES (G グループの初期設定 [G group no.])
20118
MD 番号
GEOAX_CHANGE_RESET
自動ジオメトリ軸変更可能
初期設定 : 0
最小入力リミット : ***
最大入力リミット : ***
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 2.0
意味 :
0: 現在のジオメトリ軸の構成はリセット およびプログラムスタートにより変
化しません。この設定の場合,応答はジオメトリ軸交換機能をもたない旧
ソフトウェア-バージョンと同じです。
1: 以下に基づいて,現在のジオメトリ軸の構成はリセット およびプログラム
エンドにより変化しません。
MD 20110: RESET_MODE_MASK およびプログラムスタート,MD 20112:
START_MODE_MASK または MD 20050: AXCONF_GEOAX_ASSIGN_TAB
により定義された初期状態に切り替えられる。
関連性
MD 20050: AXCONF_GEOAX_ASSIGN_TAB
MD 20110: RESET_MODE_MASK
MD 20112: START_MODE_MASK
20120
TOOL_RESET_VALUE
MD 番号
工具長補正がパワーアップ実行中に選択されるツール ( リセット/パートプロ
グラム )
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 32000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : 1
データタイプ : DWORT
適用開始 SW バージョン : 2.0
1-604
20120
TOOL_RESET_VALUE
MD 番号
工具長補正がパワーアップ実行中に選択されるツール ( リセット/パートプロ
グラム )
意味 :
Power-Up 実行中,またはリセット中,MD 20110: RESET_MODE_MASK 機能
のようなパ-トプログラム実行中,MD 20112: START_MODE_MASK に基づく
プログラムスタート中に工具長補正が選択されるツールの定義
この MD は次の場合は無意味
MD 20110: RESET_MODE_MASK, bit 0 = 0
20121
MD 番号
TOOL_PRESEL_RESET_VALUE
工具長補正がパワーアップ実行中に選択されるあらかじめ選択されたツール
(Reset /パートプログラムエンド )
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 32000
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : 1
データタイプ : DWORT
適用開始 SW バージョン : 3.3
意味 :
Power-Up 実行中,またはリセット中,MD 20110: RESET_MODE_MASK 機能
のようなパ-トプログラム実行中,MD 20112: START_MODE_MASK に基づく
プログラムスタート中に工具長補正が選択されるあらかじめ選択されたツー
ルの定義
ツールマネジメントが有効でない場合にだけ,この MD は有効です。
この MD は次の場合は無意味
MD 20110: RESET_MODE_MASK, bit 0 = 0
20130
MD 番号
CUTTING_EDGE_RESET_VALUE
パワーアップ実行中に工具長補正が選択される切削刃(リセット/パートプ
ログラムエンド)
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 9
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : 1
データタイプ : DWORT
適用開始 SW バージョン : 2.0
意味 :
Power-Up 実行中,またはリセット中,MD 20110: RESET_MODE_MASK 機能
のようなパ-トプログラム実行中,MD 20112: START_MODE_MASK に基づく
プログラムスタート中に工具長補正が選択される切削刃の定義
この MD は次の場合は無意味
MD 20110: RESET_MODE_MASK, bit 0 = 0
20140
MD 番号
TRAFO_RESET_VALUE
初期設定 : 0
最小入力リミット : 0
最大入力リミット : 8
変更が有効になるための条件 :
電源オン
保護レベル : 2
単位 : 1
データタイプ : BYTE
適用開始 SW バージョン : 2.0
意味 :
Power-Up 実行中,またはリセット中,MD 20110: RESET_MODE_MASK 機能
のようなパ-トプログラム実行中,MD 20112: START_MODE_MASK に基づく
プログラムスタート中に工具長補正が選択される変換データブロックの定義
MD TRAFO_TYPE_1 ~ TRAFO_TYPE_8 に対応する変換データブロックの番
号(1 ~ 8)変換可能 : TRACYL, TRAANG(SW4 以降は TRANSMIT も可能)
この MD は次の場合は無意味
MD 20110: RESET_MODE_MASK, bit 0 = 0
リセット時の有効な変換
1-605
20152
GCODE_RESET_MODE
MD 番号
リセット時の GCODE 初期設定
初期設定 : 0
最小入力リミット : 0
変更が有効になるための条件 : 電 保護レベル : 2/7
源オン
最大入力リミット : 1
単位 : -
データタイプ : BYTE
適用開始 SW バージョン : 5
意味 :
リセット/ G コードを参照にしたパートプログラムエンドによる制御初期設
定の定義
0: G グループの初期設定は MD 20150: GCODE_RESET_VALUES での入力に
従って設定されます。
1: 現在の G グループ設定はリセット/パートプログラムエンドに保持されま
す。
例 : パートプログラムのリセット/エンドのたびに,MD 20150:
GCODE_RESET_VALUES から第 6 G グループ(現在の平面)の初期設定
を読取る
MD 20150: GCODE_RESET_VALUES[5]=1 ; 第 6 G グループのリセット値は
G17
MD 20152: GCODE_RESET_MODE[5]=0
; リセット及び
GCODE_RESET_VALUES[5] に対
応するパートプログラム終了後 ,
第 6 G グループは初期化される
第 6 G グループの現在の設定が , リセット及びパートプログラム終了後も保持
される場合 :
MD 20150: GCODE_RESET_VALUES[5]=1 ; 第 6 G グループのリセット値は
G17
MD 20152: GCODE_RESET_MODE[5]=1
関連性
MD 20150: GCODE_RESET_VALUES
MD 20110: RESET_MODE_MASK
MD 20112: START_MODE_MASK
1-606
; 第 6 G グループの現在の設定はリ
セット/パートプログラムエンド
後に保持されます。
■ チャンネル別設定データ
42440
SD 番号
FRAME_OFFSET_INCR_PROG
原点オフセットは相対プログラミングに移動されます。
初期設定 : 1
最小入力リミット : 0
最大入力リミット : 1
変更が有効になるための条件 :
電源オン
保護レベル : 2/7
単位 : -
データタイプ : BOOLEAN
適用開始 SW バージョン : 4.3
意味 :
0: 相対プログラミングが軸について用いられる場合,プログラムされた位置
デルタだけがフレーム変更後にアプローチされます。FRAMES の原点オフ
セットは絶対位置が指定された場合にのみ移動されます。
1: 相対プログラミングが軸について用いられる場合,原点オフセットへの変
更はフレーム変更後に移動されます(SW バージョン 3 まで標準応答 )。
関連性
SD 42442: TOOL_OFFSET_INCR_PROG
1-607
1.11.5 信号の説明
■ 軸/スピンドル別の信号
■ 軸
なし
■ 座標系
なし
■ ワーク関連の実際値系
なし
1-608
■ チャンネル別の信号
■軸
なし
■ 座標系
PLC から NCK までの信号
DB 31, ...
DBX3.0
データブロック
外部原点オフセット
信号
エッジ評価 : なし
信号 更新 :
信号ステータス 1 あるいは信号
遷移 0 ---> 1
一つの軸について軸別に設定された(予め選択された)外部原点オフセット
の値が,基本座標系とワーク座標系との間の合計原点オフセットを計算する
ための新しい値として使用されます。
信号ステータス 0 あるいは信号
遷移 1 ---> 0
一つの軸について軸別に設定された(予め選択された)外部原点オフセット
の値は,基本座標系とワーク座標系との間の合計原点オフセットを計算する
ための新しい値として使用されません。前の値が有効です。
この信号は次の場合は無意味
$AA_ETRANS[axis] がすべての軸についてゼロである場合
例外,エラー
ブート(電源オン)後は信号ゼロ
関連性
$AA_ETRANS[axis]
信号が有効となる最初の SW バージョン .: 2.0
■ ワーク関連の実際値系
DB 21-28
NC チャンネルから PLC までの信号
DBB
ビット 7
ビット 6
ビット 5
ビット 4
ビット 3
ビット 2
ビット 1
ビット 0
61
T fct. 1 change /
K1/, /K2/
62
D fct 1 change /
K1/, /K2/
118 to119
T ファンクション 1 ( バイナリ ) /S5/, /K2/
129
D ファンクション 1 ( バイナリ ) /S5/, /K2/
DB 21-28
NCK チャンネルから PLC までの信号
Byte
ビット 7
208
G ファンクショングループ 1 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
209
G ファンクショングループ 2 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
210
G ファンクショングループ 3 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
211
G ファンクショングループ 4 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
212
G ファンクショングループ 5 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
213
G ファンクショングループ 6 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
214
G ファンクショングループ 7 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
215
G ファンクショングループ 8 ( バイナリ ) のアクティブな G 機能の番号 /K1/, /K2/
ビット 6
ビット 5
ビット 4
ビット 3
ビット 2
ビット 1
...
G ファンクショングループ n-1 ( バイナリ ) のアクティブな G 機能の番号 /K1/
G ファンクショングループ n ( バイナリ ) のアクティブな G 機能の番号 /K1/
1-609
ビット 0
1.11.6 例
■ 軸
例
回転テーブルを有する 3 軸フライス盤の軸構成
・第 1 マシン軸 : X1
直線
・第 2 マシン軸 : Y 1
直線
・第 3 マシン軸 : Z1
直線
・第 4 マシン軸 : B
回転テーブル ( 異なる側面から加工するために回転させる )
・第 5 マシン軸 : TM
ツールマガジン(ツールレゾルバ)用の回転軸
・第 6 マシン軸 : S1
( スピンドル )
・ジオメトリ軸 : X
( 第 1 チャンネル )
・ジオメトリ軸 : Y
( 第 1 チャンネル )
・ジオメトリ軸 : Z
( 第 1 チャンネル )
・特殊軸 : B
( 第 1 チャンネル )
・特殊軸: TM
( 第 1 チャンネル )
・スピンドル : S1/C
( 第 1 チャンネル )
1-610
マシンデータ
AXCONF_GEOAX_NAME_TAB[0] = X
AXCONF_GEOAX_ASSIGN_TAB[0] = 1
AXCONF_GEOAX_NAME_TAB[1] = Y
AXCONF_GEOAX_ASSIGN_TAB[1] = 2
AXCONF_GEOAX_NAME_TAB[2] = Z
AXCONF_GEOAX_ASSIGN_TAB[2] =3
AXCONF_CHANAX_NAME_TAB[0] = X
AXCONF_MACHAX_USED[0] = 1
AXCONF_CHANAX_NAME_TAB[1] = Y
AXCONF_MACHAX_USED[1] = 2
AXCONF_CHANAX_NAME_TAB[2] = Z
AXCONF_MACHAX_USED[2] = 3
AXCONF_CHANAX_NAME_TAB[3] = B
AXCONF_MACHAX_USED[3] = 4
AXCONF_CHANAX_NAME_TAB[4] = WZM AXCONF_MACHAX_USED[3] = 5
AXCONF_CHANAX_NAME_TAB[5] = SP1
AXCONF_MACHAX_USED[4] = 6
SPIND_ASSIGN_TO_MACHAX[AX1] = 0 AXCONF_MACHAX_NAME_TAB[0] = X1
SPIND_ASSIGN_TO_MACHAX[AX2] = 0 AXCONF_MACHAX_NAME_TAB[1] = Y1
SPIND_ASSIGN_TO_MACHAX[AX3] = 0 AXCONF_MACHAX_NAME_TAB[2] = Z1
SPIND_ASSIGN_TO_MACHAX[AX4] = 0 AXCONF_MACHAX_NAME_TAB[3] = B
SPIND_ASSIGN_TO_MACHAX[AX5] = 0 AXCONF_MACHAX_NAME_TAB[4] = W1
SPIND_ASSIGN_TO_MACHAX[AX6] = 1 AXCONF_MACHAX_NAME_TAB[5] = C1
MD 30300: IS_ROT_AX[3] = 1
MD 30300: IS_ROT_AX[4] = 1
MD 30300: IS_ROT_AX[5] = 1
MD 30310: ROT_IS_MODULO[3] = 1
MD 30310: ROT_IS_MODULO[4] = 1
MD 30310: ROT_IS_MODULO[5] = 1
MD 30320: DISPLAY_IS_MODULO[3] = 1
MD 30320: DISPLAY_IS_MODULO[4] = 1
MD 20090: SPIND_DEF_MASTER_SPIND = 1
MD 番号
MD 10000: AXCONF_MACHAX_NAME_TAB[n]
MD 20050: AXCONF_GEOAX_ASSIGN_TAB[n]
MD 20060: AXCONF_GEOAX_NAME_TAB[n]
MD 20070: AXCONF_MACHAX_USED[n]
MD 20080: AXCONF_CHANAX_NAME_TAB[n]
MD 35000: SPIND_ASSIGN_TO_MACHAX[n]
1-611
■ 座標系
例
2 つのチャンネルを有する 1 つの NCU 用に 1 つのグローバルな基本フレームを構
成する
それぞれのチャンネルが基本フレームを説明することができます。他のチャンネ
ルがその変化(基本フレームの起動後)を検出します。2 つのチャンネル基本フ
レームを読むことができ,それぞれのチャンネルがそれぞれのグローバル基本フ
レ-ムを起動できます。
マシンデータ :
$MN_AXCONF_MACHAX_NAME_TAB[0] = "X1" ; マシン軸識別子
$MN_AXCONF_MACHAX_NAME_TAB[1] = "X2"
$MN_AXCONF_MACHAX_NAME_TAB[2] = "X3"
$MN_AXCONF_MACHAX_NAME_TAB[0] = "X4"
$MN_AXCONF_MACHAX_NAME_TAB[1] = "X5"
$MN_AXCONF_MACHAX_NAME_TAB[2] = "X6"
$MN_MM_NUM_GLOBAL_BASE_FRAMES = 1
;NCU グローバル基本フレーム
$MC_MM_NUM_BASE_FRAMES = 1
; チャンネル基本フレーム
チャンネル 1
チャンネル 2
$MC_AXCONF_CHANAX_NAME_TAB[0] = "X"
$MC_AXCONF_CHANAX_NAME_TAB[1] = "Y"
$MC_AXCONF_CHANAX_NAME_TAB[2] = "Z"
$MC_AXCONF_CHANAX_NAME_TAB[0] = "X"
$MC_AXCONF_CHANAX_NAME_TAB[1] = "Y"
$MC_AXCONF_CHANAX_NAME_TAB[2] = "Z"
$MC_AXCONF_MACHAX_USED[0] = "1"
$MC_AXCONF_MACHAX_USED[1] = "2"
$MC_AXCONF_MACHAX_USED[2] = "3"
$MC_AXCONF_MACHAX_USED[0] = "4"
$MC_AXCONF_MACHAX_USED[1] = "5"
$MC_AXCONF_MACHAX_USED[2] = "6"
$MC_AXCONF_GEOAX_NAME_TAB[0] = "X"
$MC_AXCONF_GEOAX_NAME_TAB[1] = "Y"
$MC_AXCONF_GEOAX_NAME_TAB[2] = "Z"
$MC_AXCONF_GEOAX_NAME_TAB[0] = "X"
$MC_AXCONF_GEOAX_NAME_TAB[1] = "Y"
$MC_AXCONF_GEOAX_NAME_TAB[2] = "Z"
$MC_AXCONF_GEOAX_ASSIGN_TAB[0] = "1"
$MC_AXCONF_GEOAX_ASSIGN_TAB[1] = "2"
$MC_AXCONF_GEOAX_ASSIGN_TAB[2] = "3"
$MC_AXCONF_GEOAX_ASSIGN_TAB[0] = "4"
$MC_AXCONF_GEOAX_ASSIGN_TAB[1] = "5"
$MC_AXCONF_GEOAX_ASSIGN_TAB[2] = "6"
第 1 系列のプログラム X
第 2 系列のプログラム Y
N..
N100 $P_NCBFR[0] = CTRANS( x, 10 )
N...
; NCU グローバル基本フレームの起動
N130 $P_NCBFRAME[0] = CROT(X, 45)
; 現在の NCU グローバル基本フレームが回
転により起動する。
; アラーム 18310(グローバルフレームでは
回転できないため)
N...
1-612
; 第 2 チャンネルでアクティブな NCU グ
ローバルフレーム
N510 G500 X10
; アクティブな基本フレーム
N520 $P_CHBFRAME[0] = CTRANS( x, 10 )
; 第 2 系列用現在のフレームはオフセット
により起動します。
1.11.7 データフィールド,リスト
■ インタフェース信号
■軸
DB 番号
名称
ビット,バイト
参照
軸/スピンドル別
31, ...
60.0
1.17(S1)
スピンドル/軸なし
■ 座標系
DB 番号
ビット,バイト
名称
参照
名称
参照
軸/スピンドル別
31, ...
3.0
外部原点オフセット
■ ワーク関連の実際値系
DB 番号
ビット,バイト
チャンネル別
21, ...
61.0
T 機能の変更
21, ...
62.0
D 機能の変更
21, ...
118-119
T 機能
21, ...
129
D 機能
21, ...
208
アクティブな機能グループ 1 の番号
21, ...
209
アクティブな機能グループ 2 の番号
...
...
...
21, ...
230
アクティブな機能グループ 29 の番号
■ マシンデータ
■ 軸/座標系
番号
名称
識別子
一般事項 ($MN_ ... )
10000
AXCONF_MACHAX_NAME_TAB
機械軸の名称
10600
FRAME_ANGLE_INPUT_MODE
フレーム
10610
MIRROR_REF_AX
FRAME 要素の基準軸
10612
MIRROR_TOGGLE
ミラートグル機能
10613
NCBFRAME_RESET_MASK
NCU グローバル基本フレームの RESET 応
答
10650
IPO_PARAM_NAME_TAB
補間パラメータの名称
10660
INTERMEDIATE_POINT_NAME_TAB
G2/G3 の中間ポイント座標の名称
1-613
参照
名称
番号
識別子
18600
MM_FRAME_FINE_TRANS
すべての設定可能な FRAMES および基本
フレームのオフセット(微)
18601
MM_NUM_GLOBAL_USER_FRAMES
グローバルにあらかじめ定義されたユーザ
フレームの番号
18602
MM_NUM_GLOBAL_BASE_FRAMES
グローバル基本フレームの番号
参照
チャンネル別 ($MC_ ... )
20050
AXCONF_GEOAX_ASSIGN_TAB
系列軸へのジオメトリ軸の割当て
20060
AXCONF_GEOAX_NAME_TAB
チャンネル内のジオメトリ軸の名称
20070
AXCONF_MACHAX_USED
チャンネル内で有効なマシン軸番号
20080
AXCONF_CHANAX_NAME_TAB
チャンネル軸の名称/特殊軸の名称
20110
RESET_MODE_MASK
リセット時の制御システム初期設定の定義
20112
START_MODE_MASK
NC スタート時,パワーアップ後,および
リセット時の制御初期設定の定義
20118
GEOAX_CHANGE_RESET
自動ジオメトリ変更可能
20121
TOOL_PRESEL_RESET_VALUE
パワーアップ実行中に選択されたツール
20140
TRAFO_RESET_VALUE
パワーアップ実行中に設定された変換デー
タ
22532
GEOAX_CHANGE_M_CODE
ジオメトリ軸交換用 M コード
22534
TRAFO_CHANGE_M_CODE
変換切り替え用 M コード
28081
MM_NUM_BASE_FRAMES
チャンネル別基本フレームの番号
24000
FRAME_ADD_COMPONENTS
追加のプログラム可能なフレーム要素のプ
ログラミング/変更の分離
24002
CHBFRAME_RESET_MASK
チャンネル別基本フレームのリセット応答
SPIND_ASSIGN_TO_MACHAX
スピンドルの機械軸 への割当て
2.7(M1)
軸別 ($MA_ ... )
35000
システム変数
$AA_ETRANS[axis]
1.17(S1 )
参照
名称
外部原点オフセットのオフセット値
1-614
■ ワーク関連の実際値系
番号
名称
識別子
参照
チャンネル別 ($MC_ ... )
20110
RESET_MODE_MASK
パワーアップおよび リセット/パートプログラ
ムエンド後の制御初期設定の定義
20112
START_MODE_MASK
パートプログラムスタート後の制御初期設定の
定義
20118
GEOAX_CHANGE_RESET
自動ジオメトリ軸変更 ( MD20110,MD20112 に
従う )
20120
TOOL_RESET_VALUE
パワ-アップ中に選択される工具長補正 ( リ
セット/パートプログラムエンド )
20121
TOOL_PRESEL_RESET_VALUE
パワ-アップ中に選択されるあらかじめ選択さ
れた工具長補正 ( リセット/パートプログラム
エンド )
20130
CUTTING_EDGE_RESET_VALUE
切削刃の初期設定
20140
TRAFO_RESET_VALUE
変換の初期設定
20150
GCODE_RESET_VALUES
G コードの初期設定
20152
GCODE_RESET_MODE GCODE
リセット による初期設定
1.10( K1)
■ 設定データ
番号
名称
識別子
チャンネル別 ($SC_ ... )
42440
FRAME_OFFSET_INCR_PROG 原点オフセットは相対プログラミングに移動されます。
■ アラーム
アラームの詳細説明については次を参照してください。
参照: アラーム一覧
あるいは MMC 101/102/103 を有するシステムのオンラインヘルプ
1-615
参照
1-616
Yaskawa Siemens CNC シリーズ
本製品の最終使用者が軍事関係であったり, 用途が兵器などの製造用である場合には,
「外国為替及び外国貿易法」の定める輸出規制の対象となることがありますので,輸
出される際には十分な審査及び必要な輸出手続きをお取りください。
製品改良のため、定格、寸法などの一部を予告なしに変更することがあります。
この資料についてのお問い合わせは、当社代理店もしくは、下記の営業部門にお尋ね
ください。
製造
株式会社
安川電機
シーメンスAG
販売
シーメンス・ジャパン株式会社
工作機械営業本部
東京都品川区東五反田3-20-14
高輪パークタワー 〒141-8644
東京都品川区大崎1-11-1
ゲートシティ大崎ウエストタワー 〒141-8644
TEL
03))
3493-7411
FAX
()
03
)3493-7422
(03
TEL((03
5423-7359
FAX
5423-7438
アフターサービス
カスタマーサービス事業本部
アフターセールスサービス部
03)5423-8732
TEL 0120-996095(フリーダイヤル) FAX
FAX((03)3493-7433
シーメンス・ジャパン株式会社
http://www.siemens.co.jp
資料番号 NCSI-SP02-12D
C 2012年2月 作成 00-11
11-9-12
02- WSC02, 02-WSC09
無断転載・複製を禁止
9
© Copyright 2026 Paperzz