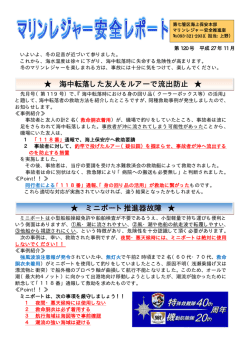
研究・開発用ドライビングシミュレーションシステムD3sim は、 自動車関連分野の研究・開発を強力にサポートするシステムです。 実車では危険をともなう実験や、均一な交通環境条件が繰り返し必要な実験など、 お客様のニーズに合わせ、多様な研究・開発にご活用いただくことができます。 シミュレータを導入した研究・開発の効果 開発費の低減 シミュレーション技術を利用することで 可能になる研究・開発があります。 実車の試作によらず、実験・評価が可能になり、 開発・試験期間が短縮され、開発費の低減に つなげることができます。 実験精度向上 実環境では実現困難な実験や、実際に試作す る前段階での評価など、いままで出来なかった 環境条件等、同条件での反復実験が可能に なり、 システムの品質・信頼性が向上します。 研究・開発を可能にするのが、三菱プレシジョン のシミュレーションシステムです。 社会貢献 予防安全システムの開発促進により、交通 事故削減へつながることが期待できます。 1 ITS技術開発 安全/安心 ●複雑かつ多様化する安全運転 システムの開発期間短縮と評価 精度向上。 ●交通事故の削減を目的とした 分析、 シミュレーション。 快 適 環境/インフラ ●カーナビゲーションなど多様化 ●燃費性能の向上やエコドライブ する表示システムの操作性、視 など、環境問題への対策。 認性の評価。 ●交通流改善、渋滞解消の研究。 ●車室内快適空間の追求。 ●道路や標識などのインフラ (乗り心地、疲労など) 整備段階での評価。 D3sim が 研究・開発をサポート D3sim はハードウェア/ソフトウェア構成 を選択、カスタマイズすることでお客様 の研究・開発用途に必要な機能を用意 できるシミュレ ーションシステムです。 ITS技術開発に関わる3つのテーマ「安 全/安心」、 「快適」、 「環境/インフラ」を 中心に、お客様の研究用途に合わせた 構成例を紹介します。 2 道路データベース/ 道路データベース+ 作成環境 道路 データベース 作成環境 ライブラリ 道路 データベース ステアリング 反力装置 模擬運転席 生体計測装置 の接続 モーションシステム・ ターンテーブル 運転席/ 計測装置の接続 ステアリング反力装置 視線計測装置 の接続 車両運動の 模擬との接続 HILS接続 スタンダード モデル 安全/ 安心:ASVを始めとした安全運転支援システムの開発 エントリーモデル D3sim は運転できるだけのシミュレータではありません。各種計測機器との接続やデータ通信機能により、 実車実験では測定が難しい走行状況等のデータが記録できるので、分析・評価が行えます。 基本モデル HILSの接続/ (1モデル選択) 車両運動の模擬 映像装置 研究・開発テーマ対応一覧 データ通信機能(シナリオユーザ変数による自車両の車線内位置検出)、自車両の外部制御機能(操舵角制御、ブレーキ制御)を レーンキープアシスト機能の開発・評価 用いて、 レーンキープアシスト機能、警報システムの開発・評価に使用することができます。 また、ステアリング反力装置を用い ○ ○ ○ ○ ○ ることにより、操作反力へのトルク制御が可能になります。 データ通信機能(シナリオユーザ変数による先行車までの距離検出)、自車両の外部制御機能(速度制御)を用いて、ACC機能の 開発・評価に使用することができます。 ACC(Adaptive Cruise Control)の開発・評価 シナリオにて周辺車両の割り込み走行も任意に設定可能で、様々な走行状況におけるシステム動作の検証も可能です。 AFS(Adaptive Frontlighting System)の開発・評価 別途オプションを追加することによりAFS機能が模擬可能になります。現在開発中の本機能追加により、実車のヘッドライト照射 ○ ○ 範囲の模擬や操舵角に応じたスイブル機能の模擬が可能となります。※本機能の詳細はお問い合わせください。 ○ ○ データ通信機能(シナリオユーザ変数による先行車までの距離検出)、自車両の外部制御機能(ブレーキ制御)を用いて、衝突被害 衝突被害軽減ブレーキの開発・評価 軽減ブレーキ機能およびその警報システムの開発、システムの動作条件や被験者実験などを危険なく行うことができます。 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ 別途センサ模擬機能を併用することにより、実車搭載時の複合的な検証・評価も可能となります。 データ通信機能(横滑り角、路面摩擦係数)、自車両の外部制御機能(ブレーキ制御)を用いて、横滑り防止機能の開発・評価に使 横滑り防止機能の開発・評価 用することができます。 ○ ○ HILSシステムの連接機能と組み合わせることにより制御ECUの評価・検証にも使用可能です。 データ通信機能(自車両位置、周辺車両位置情報検出)とシナリオイベントトリガ等を用いて、条件を満たした際に(データ通信機能 を擬似的に再現)警報やインフォメーションを表示するなど、車車間/路車間通信システムの開発・評価に使用することができます。 車車間及び路車間通信システムの開発・評価 また、HILSシステム、センサ模擬機能と組み合わせることにより、制御ECUや車載器の評価・検証にも使用できます。ITSの公道 ○ ○ ○ 実験などのデータ比較・検証などにも活用可能です。 HILS連接やデータ通信機能などの複合機能を用いて、車両搭載の各種センサ、認識カメラ類の模擬が可能になります(オプショ センサ、 レーダ、 カメラなどのシステムの開発・評価 ン)。自車両周辺の物体、位置検出(自車両から任意の方向への擬似レーダ検出模擬、物体間の距離計測データ模擬等)や人物/ ○ ○ 白線検知カメラ、ビューカメラの評価など、多機能化する車両の制御ロジックの開発・評価に有効です。 データ通信機能を用いて、ユーザ計算機内で警報ロジックを構築頂くことにより、音声や表示による警報システムの検証・評価 警報システムの開発・評価 に使用することができます。また、警報音はナレーション機能でも発生可能です。 評価デバイスがない状態では、市販のソフトウェアであるLabVIEW®を接続することで、任意のメータパネル画面の構築および ○ ○ ○ ○ ○ 独自の警報表示追加が容易に実現できます。 オプション機能として、ユーザが保有するHILS機器およびMATLAB/Simulink®等で構築したモデルとD3sim®を連接させることで、 HILSを用いたECUの開発 より実車走行に近い環境、かつ複雑なシチュエーションにおけるECU、デバイスの評価・検証が可能になります。センサやレーダ の模擬、各種予防安全システムの開発において、ECUの開発・評価は必要な事項であり、D3sim®を用いることで、実車実験や試 ○ ○ ○ ○ 作などの費用削減や期間短縮の効果が期待できます。 車両性能、走行安全の評価 CarSim®またはveDYNA®などの市販車両シミュレーションソフトウェアを使用することで、車両性能、特性をより忠実に再現可能です。 走行安定性機能のON/OFF時の比較など、実車試験の前段階における実験・評価に活用できます。 ○ ○ ● 本表は推奨案ですので、必ずしもこの構成でなければ使用 できないものではありません。 予防安全システムの開発には、事故発生時のドライバーの運転特性、車両挙動を研究・解析することが必要となります。 ドライビ ングシミュレータを用いることで、同一条件での繰り返し実験、条件を変更しての実験が安全かつ正確に行うことができ、データ ドライバーの運転特性、挙動研究 の記録/再生も可能です。 ○ D3sim®では模擬視界発生装置のオーバーレイ機能を使用した画面上への注視物体表示が可能で、視線計測装置(オプション) を用いたドライバーの注視点計測・解析など、 ドライバーがタスクを与えられた際の運転操作への影響も評価できます。 事例紹介 ○ ○ ○ ○ ●拡張性に制限のあるエントリーモデルについては、一部オプ ションとの組合せが不可能な場合がございます。 事例紹介 トヨタ自動車株式会社 / ドライビングシミュレータ 国立研究開発法人産業技術総合研究所 / 運転行動計測用ドライビングシミュレータ トヨタ自動車株式会社は、 予防安全技術の開発を促進し、実車での走行では危険が伴う実験や、特定の 国立研究開発法人産業技術総合研究所では、自動車運転場面における人間行動特性を計測し、 条件下で自動車を走行させる実験などを行うことを目的としてドライビングシミュレータを導入しました。 解明するためにD3sim を導入しました。 主に市街地等の一般道路における運転行動特性の解析を行うため、模擬視界表示装置として、全周 の視野角を持つ軽量かつ高剛性なドームスクリーンとプロジェクタ 三菱プレシジョンの担当は、360° システム、そして複数台の模擬視界発生装置を用いた映像合成技術による高精細、高分解能な模擬 視界映像、および実在の街並みを再現したデータベース、HILS、GPS模擬装置等の各種装置や、予防 安全技術に係わる機能と連携プログラムです。 居眠りや脇見運転、疲労等の状態でのドライバー運転特性を解析し、効果的に事故を低減する予防 安全技術を開発、その効果と持続性を評価するなど予防安全技術の効果検証に使用されています。 3 ○ 囲に近い没入感のあるシステムを実現しています。また、加速度や路面振動による体感を再現する ため、電動6自由度モーションシステムを付加、エンジン音や走行音や風切り音、市街地の雑音など の音響環境を再現するマルチスピーカシステムも備えています。 ITSなど車載機器からの情報呈示評価、道路構造や標識の評価や、財団法人鉄道総合技術研究所と 共同で、踏切通行実験に基づいた安全性評価を行うなど、様々な分野で研究成果をあげています。 4 道路データベース/ 道路データベース+ 作成環境 道路 データベース 作成環境 ライブラリ 道路 データベース ステアリング 反力装置 模擬運転席 生体計測装置 の接続 モーションシステム・ ターンテーブル 運転席/ 計測装置の接続 ステアリング反力装置 視線計測装置 の接続 車両運動の 模擬との接続 HILS接続 スタンダード モデル エントリーモデル 快適: HMIに係る操 作 性・視 認 性 や 乗り心 地 などの 評 価 基本モデル HILSの接続/ (1モデル選択) 車両運動の模擬 映像装置 研究・開発テーマ対応一覧 模擬視界発生装置のオーバーレイ表示機能により、ユーザが作成した車両ピラーなどのオブジェクトを模擬視界映像に重畳表 窓外視界の視認性の評価 示ができます。 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ これにより、ピラーの死角などの視認性評価、デザイン的な評価・検討が可能になります。 実車やカットボディ、模擬運転席にインパネ部機器を設置し、D3sim®と連接することで、運転時のメータやカーナビ、各種スイッ チ類の操作性や視認性の評価に活用できます。市販の視線計測装置を併用することで、注視時間の計測や評価対象デバイスの タスクによる運転への影響なども評価可能です。 各種機器の操作と視線計測データは同期して解析することも可能です。(オプション) また、GPSデータ簡易模擬機能(オプション)により、市販の地図ソフトとの接続およびカーナビへの擬似データ送信(カーナビ側 の改造が必要)も可能になります。 インパネ部機器の視認性、操作性の開発・評価 パワーステアリングや各種ステアリングアシスト機能の開発・評価用途に使用できます。 ステアリングの操作性の開発・評価 当社開発のステアリング反力装置、もしくはユーザが開発した装置のいずれにも対応可能で、 トルク制御や反力模擬が可能に ○ ○ なります。 ATやMTなどのミッション装置の開発・試験において、その操作感やショック(体感振動)を評価する装置として、D3sim®を使用 ミッションの操作性の開発・評価 ○ できます。また、オプションとして動揺装置や体感装置などを付加することで、実際の運転環境に近い形で評価が可能となります。 車内ITの操作性の開発・評価 携帯電話やカーナビなど、将来的な車内IT技術の開発用途として、D3sim®を有効利用できます。 シートの乗り心地、疲労の検証・評価 えた時の乗り心地や疲労などの評価に使用できます。 各情報提示手法や操作性、運転に与える影響などの評価が可能です。 ○ ○ ○ ○ ○ 実車やカットボディ、模擬運転席などに開発中のシートを設置し、シミュレーション走行することで、長時間運転時やタスクを与 オプションで、シートを交換可能な模擬運転席をご用意することも可能です。 ○ ○ ○ ○ ○ ○ ○ また市販の生体計測装置(オプション)を併用することで、 ドライバーの生理情報を同時計測・解析することができます。 各操作機器の配置を任意に可変可能なモックアップ(特注模擬運転席、ユーザ作成のモックアップも利用可能)を使用し、 D3sim®を使用することで、 ドライバーズポジションの評価が可能になります。 ドライバーズポジションの検証・評価 検証が困難な公道の走行試験などの代替として使用可能で、試作品の作成費用削減なども期待できます。 ステアリング反力装置などのオプション機能追加で、 より実車に近い操作感の実現も可能となります。 環境/インフラ: エコドライブ支 援 や 渋 滞 解 消 などの環 境 分 野 の 研 究 データ通信機能やCarSim®またはveDYNA®などの車両運動プログラムを用いて、走行環境や運転者ごとの運転特性の違い等、 燃費性能研究、エコドライブ支援システムの開発、評価 様々な環境下における燃費性能の研究に使用できます。(燃料消費はユーザにて算出) ○ ○ ○ また、 リアルタイムでデータを算出することで、エコドライブ支援などの表示システムの開発にも使用可能です。 D3sim®と交通流シミュレーションを連接することにより、 より多くの車両制御と自然な交通流を再現することができます。 交通流改善・渋滞解消の研究 これにより、交通工学分野での渋滞や事故発生のメカニズム解明などの研究に役立てることができます。 また、実在する道路のデータベースを作成し、その上で架空の道路を敷設するなど、渋滞解消の為の研究にも使用可能です。 ○ ○ ● 本表は推奨案ですので、必ずしもこの構成でなければ使用 できないものではありません。 D3sim®を用いて、道路標識や道路標示の有効性や設置位置など、道路設計に関する検討、評価を行うことができます。 道路設計の評価 建築予定もしくは改修予定道路のデータベースを作成することにより、道路完成前に現実に近い形で評価可能となります。 ※具体例:国立研究開発法人産業技術総合研究所 国道16号道路データベース 事例紹介 ○ ○ ○ ●拡張性に制限のあるエントリーモデルについては、一部オプ ションとの組合せが不可能な場合がございます。 事例紹介 国立大学法人東京大学生産技術研究所 / 研究用ユニヴァーサル・ドライビングシミュレータ 5 ○ 中央大学 / 舗装構造評価用トラックドライビングシミュレータ 国立大学法人東京大学生産技術研究所では、 ドライバ特性解析、 ドライバモデルの構築、ITS応用研究への 中央大学大学院理工学研究所では、土木工学における舗装構造評価を目的としてD3sim を導入し 使用を目的に、 D3sim を導入しました。 よりリアルな模擬の追求と複雑化する用途に対応するため年々改修をし、大学独自で開発した交通シミュレ ーションとも連携。交通渋滞など実交通環境の模擬も可能なシステムです。音声案内・注意喚起の検討に対 ました。 実車走行から取得した走行データの再現など、路面からの振動を模擬するため、油圧式モーション システム付きの構成です。動揺装置上には特注の筐体を付加した専用の模擬運転席を構築し、運転 応したカーナビゲーションシステムも実装。 マルチボディダイナミクスの研究に利用されました。 自動車運転技術開発やエコドラ 様々な企業との共同研究、産学官連携プロジェクトでシミュレータを活用し、 感覚を向上させております。 模擬視界表示装置は平面のスクリーンを3面設置し、約135° の視野角を確保しています。 イブを推進するドライバ支援システム、道路インフラと協調したITS社会実験の事前評価、 ステアリング操作 サスティナブル・モビリティの実現のため役立てられています。 などの各種ドライバ特性の研究を通じて、 同大学では、TruckSim®と連接し、シミュレータを用いて道路舗装の成分研究とそれが車両に与える 影響を研究しており、車両メーカの車台開発等に寄与しています。 6 基本モデル 構成品詳細 主要構成品 研究・開発用ドライビングシミュレーションシステムD3sim はユーザの研究用途や目的に合わせて スタンダードモデルとエントリーモデルの二種類から選択できます。 エントリーモデル 導入当初より拡張性を重視するユーザに適しています。 低価格での導入や、サブシステムとしてシナリオ作成・データ 解析を目的としたシステムを希望するユーザに適しています。 道路データベース【標準市街地・標準高速】 模擬視界映像表示装置 (PC モニタ ) シミュレーションプログラム【Ver.6】 【フルスペック】 演算処理装置 同期制御用ボード 模擬視界発生装置 シミュレーション プログラム [Ver.6] ※エントリーモデルは、シミュ レーションプログラム【Ver.6】 拡張性限定版です。 同期制御用ボードは含ま れておりません。 スタンダードモデル エントリーモデル 全てのシステムの基本となるモデルです。本モデルに様々なオプションを追加、組み合わせることにより、研究用途に応じた最適な システムを構築可能。ユーザの要望に応じた特注の機能追加にも対応します。 ハードウェア/ソフトウェアはスタンダード スタンダードモデルの拡張性を限定することで低価格化を実現。 モデルと同等の構成であるため、 将来的にアップグレードが可能です。 標準構成品 スタンダードモデル 簡易運転装置 9 簡易運転装置 11 13 スタンダードモデル 標準構成品 分配器 映像用モニタ 道路 データベース 道路 データベース 【標準】 【オプション】 オプション 道路データベース/ 道路データベース作成環境 模擬視界発生装置 エントリーモデル 標準構成品 分配器 道路データベース作成環境 映像装置 操作用モニタ 映像用モニタ 道路 データベース 【標準】 【オプション】 計測装置の接続 計測装置の接続 計測装置の接続 LAN HUB LAN ユーザ計算機 HUB 計測装置 ユーザ計算機 計測装置 同期制御用 ボード 演算処理装置 視線計測装置 生体計測装置 スピーカ 【フルスペック】 運転席/ ステアリング反力装置 シミュレーション プログラム[Ver.6] 簡易運転装置 (運転席 / ステアリング反力装置) 模擬運転席 【拡張性限定版】 模擬運転席もしくは実車運転席 CAN ボード RoadTools ターンテーブル 拡張 ボード ユーザ計算機 エントリーモデルに関する制限事項 6自由度モーション 汎用I/Oオプション 汎用ユーザDLLオプション IOボード モーション 制御装置 並進モーション CAN通信I/Fオプション ● 演算処理装置に同期制御用ボードを搭載していないため、 演算処理装置の計算周期と模擬視界発生装置の映像信号と は非同期となります。これにより模擬視界映像がスムーズ に更新されないことがあります。 ● オーダーメイドには対応できません。 シナリオ作成パッケージ ユーザ計算機 評価デバイスの接続 (ECU等) モーションシステム・ターンテーブル ユーザ計算機 ユーザ計算機 シナリオ作成パッケージ ユーザ計算機 HILSの接続/車両運動の模擬 ユーザ計算機 スタンダードモデル RoadTools ユーザ開発環境との接続 エントリーモデルからのアップグレード対応 一部構成品の追加を行うことで、エントリーモデルからスタンダードモデルへアップグレード ができます。 HILS計算機 車両運動の模擬との接続 追 加 エントリーモデル 同期制御用ボード 簡易運転装置 シミュレーションプログラム【Ver.6】 演算処理装置 【拡張限定解除ライセンス】 11 ページ 12 ページ 映像装置 モーションシステム・ ターンテーブル ユーザ開発環境 HILS接続 オプション 簡易運転装置 ステアリング 反力装置 ページ 運転装置 スピーカ スピーカ 運転席 シミュレーション プログラム[ver.6] 10 視線計測装置 演算処理装置 スピーカ ページ 操作用モニタ 同期制御用 ボード 同期 9 映像装置 道路データベース ページ HILS の接続 / 車両運動の模擬 オプション 道路 データベース ページ 【標準】 道路データベース ※道路データベース、模擬運転席、映像装置および視線計測装置のオプションのみ対応可能です。 模擬視界発生装置 ページ 12 ページ 【オプション】 道路データベース 14 ページ 模擬視界発生装置 模擬視界映像表示装置 (PC モニタ ) 道路データベース作成環境 道路データベース【標準市街地・標準高速】 17 7 ページ 8 シミュレーションプログラム [Ver.6] 車両運動、音響の模擬、シナリオ制御および実験支援などを行うソフトウェア。 GUIの導入により、簡単にシナリオ作成が可能となりました。 シナリオ作成 シナリオ制御 移動物体制御/信号機制御 GUI (グラフィック・ユーザ・インターフェイス) ユーザが作成したシナリオの選択、初期化、 により、容易にシナリオを作成することが 開始、 停止等の操作を制御します。走行デー 可能です。車両や歩行者などの移動物体の タの記録および記録した走行データの再生 配置、特性、経路、イベントなどの設定も (一時停止、スキップ、コマ送り)を行う GUI から行うことができます。複雑なシナ ことができます。その他視点切替機能、シ リオはプログラミングにより作成すること ナリオイベントスイッチ制御機能、環境設 もできます。 定機能を装備しています。 シナリオにて他車両、歩行者などの移動物 体の走行経路を設定することで、基本的な 交通規則に準じた自動走行による交通流を 実現できます。シナリオで設定したイベン トや条件等に従い、他車両および信号機を 制御します。 50 種 バス: 2種 移動物体例(普通車) 特殊車両: 7 種 二輪車: シナリオ作成画面 オペレータ操作画面 2種 歩行者: 30 種 その他: 16 種 視点切替画面 ●サンプルシナリオとして自動運転、自動操舵など が含まれています。 ●視点切替機能:すべての移動物体の鳥瞰視点、直 上視点、ユーザ任意視点が設定できます。 ●オプションソフトウェアのシナリオ作成パッケージ により、ユーザ計算機でもシナリオを作成できます。 ●環境設定:時刻、天候(晴 / 雨 / 雪)、視程、風向・ 風速がリアルタイムで変更できます。 8種 自転車: 移動物体例(歩行者) ( うち 13 種スキニングモデル) ●速度計、回転計の指 針の色 / 太さ / 長さ ●速度計、回転計の盤 面ビットマップ ●各指示灯、警告灯の ビットマップ 文字列表示 計器表示 状況表示(3次元) 実験中にリアルタイムでパラメータを数値表示 / グラフ表示が可能で、 パラメータはデータ記録できます。 (基本サンプリング周波数は 120Hz) データ変換プログラムを使用し、記録されたデータを CSV 形式に変換 することで、実験後のデータ解析に使用することができます。 また、データ通信機能を使用することで、ユーザ計算機とリアルタイムで シミュレーションプログラム内のデータを送受信することができます。 ※スキニングモデル : 移動速度に応じたなめらかな動きを実現。手をあげる、 振り返るなどの動作をシナリオから設定できます。 車両運動の模擬 音響の模擬 当社開発の普通車車両運動モデルを標準装備しています。 オプションで CarSim® を使用することができます。 走行音、接触音、衝突音など多様な音響を発生させることが できます。エンジン回転数、速度による走行音の変化や、ナレー ション機能など、充実した音響模擬を実現しています。 記録データ例 システムデータ 自車両データ シナリオシーン シナリオ実行時間 シナリオ記録時間 道路 BODY ID 走行距離 自車車両位置(x 軸、y 軸、z 軸) 姿勢角(ピッチ、ロール、ヨー) 車体加速度(前後、左右、上下) 車体角速度(前後、左右、上下) タイヤ力(x 成分、y 成分、z 成分:各車輪) エンジン回転数 エンジントルクステアリング角度 アクセル踏み込み量 ブレーキ踏み込み量 サイドブレーキ引き量 ライトスイッチ ウインカー ハザードランプ ホーン操作 シートベルト イグニッションキー操作 シフト操作 ワイパー操作 接触発生状態 衝突発生状態 移動物体データ 位置(x,y,z)座標 姿勢角(ピッチ、ロール、ヨー) 方位角 速度 加速度 ウィンカ ヘッドライト ブレーキランプ ホーン サイレン 道路ネットワークデータ情報 その他 記録データプレビュー表示 記録データのCSV変換表示 ●シナリオ内で取得したデータの送信(シナリオユーザ変数を使用)、ユーザ 計算機からのデータ受信(シナリオ外部変数を使用)や自車両の外部制御機能 による自車両入力データの加算、置換も可能になります。 信号データ 環境データ(視程、時刻、風速、風向、天候) ナレーションデータ シナリオユーザー変数 外部ユーザー変数 計測装置の接続 HILSの接続/車両運動の模擬 D3sim とHILS(Hardware in the Loop Simulation)を接続することで、 ドライバの運転による試験が可能になり、 より実車に近い試験が行えます。 市販の計測装置とD3sim の接続が可能です。 HILSの接続 車両運動模擬の接続 ユーザ開発環境の接続 視線計測装置/生体計測装置の接続 D3sim と HILS の接続により、ドライバー を介した、より実車に近い交通環境下で車 載機器を試験することができます。 (1kHz 以上のサンプリング周波数にて車載機器と の入出力が可能) 市販の車両運動シミュレーションソフト ウェアである CarSim® や veDYNA® をオプ ションで使用可能です。 データ通信ライブラリを使用し、ユーザが 作成した開発環境を接続することが可 能です。 視線計測装置からの視線方向および生体計測装置にて取得されたデータを、時間カウンター情報 とともに、運転操作情報および交通環境データと一緒に記録できます。また、視線計測装置から リアルタイムで取得したデータに合わせてシナリオを制御するプログラムが設定できます。 ま た、車 両 運 動 接 続 用 の デ ー タ イ ン タ フェースに合わせることで、ユーザ独自の 車両運動シミュレーションモデルを接続す ることも可能です。 (veDYNA® については HILS の接続オプショ ンと組み合わせる必要があります ) 例えば、自車両や周辺車両のシミュレーショ ンデータをリアルタイムに受信し、それを 基に警報表示を行うシステムや、さらに運 転操作への介入制御を行うシステムを作成 し接続することが可能です。 また、データ通信ライブラリは LabVIEW(TM) から使用することも可能であり、LabVIEW(TM) の vi(バーチャル インスツルメンツ)として 作成されたプログラムを接続することも可 能です。 さらに、汎用 IO オプションでデジタル・ア ナログ入出力をユーザ側で設定することが できます。CAN 通信 I/F オプションでユーザ 開発環境を D3sim へ接続できます。 ECU 等の車載機器の開発において、数値シ ミュレーションでは評価しきれないドライ バーの影響も評価可能になります。 ペダルアシスト機能、レーンキープアシス ト機能などの安全運転支援システムの評 価・検証をリアルタイム環境で行うことが できます。 HILS を構成する装置はユーザにて選択頂く ことが可能です。 【接続実績のある装置】 dspace、CRAMAS 9 計器表示 自車両の速度、エンジン回転数、警報灯など の情報を計器画面に表示することができます。 また、計器表示のデザインが変更できます。 実験支援 軽自動車: 6 種 トラック: 6 種 状況表示 自車両、他車両および信号機の状況を簡易 マップ上に 2 次元もしくは 3 次元で表示す ることができます。 オーバーレイ表示 ●移動物体の種類 普通車: オブジェクト表示 ユーザが作成した車両ピラーや計器パネル など、任意のオブジェクトを模擬視界映像 に重畳表示することが可能です。また、シ ナリオから任意の文字列(半角英数カナ) も表示できます。 ●モニタカメラを接続して映像を記録する場合、ハンドル、ブレーキなどの操作情報や、 視線計測装置からの視点位置、自車、他車および信号などの道路環境情報を同期させ て記録 / 再生することが可能です。 【接続実績のある装置】 視線計測装置:EMR シリーズ、SmartEye Pro、faceLAB(TM) 生体計測装置:Polymate 視線計測装置 事例紹介 愛知工科大学 / 研究用大型ドライビングシミュレータ 愛知工科大学高度交通システム(ITS)研究所では、次世代高度交通システムのための基礎的研究を 目的とし、D3sim を導入しました。 このドライビングシミュレータは平面3面スクリーンの広視野角 映像表示と模擬運転席を採用し運転中の携帯電話使用など様々な場面での、 ドライバーの状態・行 動の計測解析の実験に活用され、予防安全の研究に役立てられています。 被験者が運転を行い、制御卓からオペレーターが指示を出すシステムです。制御卓には簡易運転装 置も装着されており、 こちらから運転することも可能です。 今後もハードウェア/ソフトウェアの拡張を計画しており、進化を続けているドライビングシミュレー タです。 10 運転席 映像装置 簡易運転装置が標準で付属するほか、実車部品を使用した模擬運転席、さらに実車のボディを 利用した運転席にオプション対応可能です。 標準 簡易運転装置 ゲーム用ハンドルおよびペダル ターゲットプロジェクタ 模擬視界発生装置は弊社独自の技術でリアルタイムシミュレーション専用に 組上げられており、その性能を引き出せるように配慮されています。ユーザ の研究目的、用途に応じた様々な模擬視界表示装置も提案、対応可能です。 模擬視界発生装置 高性能PCとグラフィックスボードの組み合わせで構成されています。 Ver.6対応の模擬視界発生装置は高精細な映像表現が可能です。 オプション 模擬運転席 実車部品を使用した模擬運転席 実車運転席 実車のボディを利用した運転席 簡易運転装置 ・画像更新レート 60Hz、表示解像度 SXGA 以上を実現しています。 ・最新グラフィックスボードにいち早く対応するため、オリジナルの PC 用シーングラフを採 用しています。 ・演算処理装置と 60Hz で同期を取っており、映像の動きが安定しているため滑らかです。 ・高精細な映像表現として、リアルタイムの陰影効果、夜間の街灯効果、移動物体のライ ティング表現 、道路や壁面の表面模擬、移動物体車両への映りこみ、夜間の建物窓の 反射効果が向上しました。 ・模擬視界発生装置のみの更新・追加も可能です。( オプション ) ・立体視 ( ステレオ ) 描画が可能です。( オプション ) ターゲットプロジェクタ表示例 (平面スクリーン) 中心視野の視認性向上を目的とした機能です。スク リーンの一部に別途プロジェクタにてインセット表示 することで、映像の分解能を向上させることができ、 対向車や標識などの認識精度向上に効果があります。 プロジェクションクラスタ (使用する模擬視界発生装置の能力および処理負荷によっては、映像描画の更新レートが低下することがあります。) 模擬視界表示装置 プロジェクタとスクリーン、液晶モニタ等、使用目的や装置の規模に合わせて 最適な映像表示環境を提案します。 模擬運転席/スプリング反力装置 実車フルボディ ステアリング反力装置 オプション運転席には、用途・仕様に応じたステアリング反力装置を付加することができます。 スプリング反力装置 模擬運転席に標準で搭載。スプリングとダンパーにより操作反力を簡易に模擬。 ステッピングモータ反力装置 模擬運転席/スプリング反力装置 当社独自開発のコントローラとステッピングモータの組み合わせにより、速度 と操舵角に応じた操舵トルクを発生可能な反力装置でユーザにてトルク制御で きます。(発生操舵トルクには制限があります) AC/DCサーボモータ反力装置 AC/DC サーボモータを使用することで、高トルク/高推力を発生することが可 能な反力装置。DSP ボード採用で高速演算処理により高分解能・高応答性を実現 すると共に、ユーザにてトルク制御や反力性能を設定・変更可能。 ・プロジェクタを使用した大型スクリーンへの映像表示 ・複数台の表示装置が連続する広角度視野の映像表示 ・スクリーンの形状は平面、円筒 ( 全周含む )、球面ドームなどに対応できます。 プロジェクションクラスタ映像表示例 (円筒スクリーン) 当社独自のシームレス大画面映像表示システムです。 複数台のプロジェクタ映像を自動的に合成可能で、 映像生成時にソフトウェアで映像歪み・継ぎ目補正 を行うため、映像表示のフレーム遅れがなく、リア ルタイムシミュレーションに最適なシステムです。 モーション装置 6自由度モーションシステムやターンテーブル等の体感装置を追加することで、 運転時の加速度感や路面振動等の模擬が可能になります。 6自由度モーションシステム 全 6 自由度 ( ピッチ , ロール , ヨー ,X , Y, Z 軸)の加速度、角加速度を体感 させることができます。電動および油圧方式があります。 電動ターンテーブル 右左折、コーナリング時の運転感覚向上に効果があります。 電動6自由度モーションシステム+ターンテーブル 並進装置 6 自由度モーションシステムでは再現が難しい連続した加減速感や車線変更 時の左右加速度の向上に効果があります。 ボディソニック 高周波震動帯の体感付加に有効です。 実車フルボディ/ACサーボモータ反力装置 電動6自由度モーションシステム+並進装置 事例紹介 事例紹介 一般財団法人日本自動車研究所 / 全方位視野ドライビングシミュレータ 独立行政法人交通安全環境研究所 自動車安全研究領域では、運転者特性の計測、交通事故の発生 D3sim による全方位視野ドライビングシミュレータを導入しました。 模擬視界発生装置は水平360° 、垂直65° のドームスクリーンを採用し、右左折・出合い頭・車線変更時 の実験が可能になりました。実車ボディにターンテーブル付き電動6自由度モーションシステムを付加 状況の再現、運転支援システムの評価、 ドライビングシミュレータの性能評価等を行うために し、加速度だけでなく回転運動の模擬が可能となりシミュレータ酔いの低減も考慮しています。 また、HILSシステムを用いて反力や動揺装置の制御の高速化を実現しており、被験者の運転行動を 把握するために複数の視線計測装置も連接しております。予防安全技術と先進車両技術の模擬で、 その技術の有効性を評価しヒューマン・マシン・インタフェースの改善の研究に使用されています。 11 独立行政法人交通安全環境研究所 / 並進装置付先進型ドライビングシミュレータ 一般財団法人日本自動車研究所では、同研究所3式目となる次世代ドライビングシミュレータとして、 D3sim を導入しました。国土交通省からの受託調査として、通信利用型安全運転支援システムの HMI(ヒューマン・マシン・インタフェース)に関する調査等でシミュレータが活用されています。 また、システム作動時にドライバーへ提供するHMIの仕様の違いによって運転操作へ与える影響に ついての調査にもシミュレータが活用されています。本装置は8mの水平移動が可能な1軸リニア 並進装置の上に1軸の油圧傾斜台を搭載、さらにその上に電動6自由度モーションシステムを付加 することにより、体感評価能力を向上させた構成です。 12 道路データベース D3sim のために、架空および実在する道路を模擬した走行環境データベースです。 標準構成に含まれる標準市街地・標準高速道路に加え、オプションを多数用意しています。 Ver.6( 高精細 ) 標準市街地 リアルタイムの陰影効果、夜間の街灯効果、移動物体のライティング表現、道路や壁面の表面模擬、移動物体車両への映りこ み、夜間の建物窓の反射効果が向上しました。 架空の市街地で、約1.5km四方のエリアを模擬しています。直線道路の組合せで、ワープ走行可能な道路を含みます。 ビル街、商店街、駐車場等の各種市街地を模擬しています。 Ver.6( 高精細 ) 架空の市街地で、約2.2km×2.6kmのエリアを模擬しています。道路は曲線部を含む現実の道路に近い構成で、ワープ走行 新市街地 可能な道路を含みます。右折専用レーンや右折専用信号を含んでいます。雨、雪環境模擬が追加できます。 夜間 雨雪 路面 ワープ ナビ 標準 高精細 走行 走行 起伏 走行 対応 ○ ○ ○ 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 ○ (夜間走行) ※データベースエリアを俯瞰した映像のため高精細表示ではありません。 (夜間走行) 仮想の高速道路で、約20kmのコースを模擬しています。緩やかに蛇行しており、ワープ走行可能です。 標準高速道路 「SA」および「PA」の模擬はありません。 夜間 雨雪 路面 ワープ ナビ 標準 高精細 走行 走行 起伏 走行 対応 ○ (夜間走行) ○ ○ ○ ○ (夜間走行) 関内みなとみらい地区と架空の市街地から構成する約1.2km×約5kmのエリアを模擬しています。 実在の6号線向島から竹橋までと、3号線高樹町から竹橋JCTまでを都心環状線で接続した首都高速道路で、全長約15kmを 首都高速 3号線 & 6 号線 模擬しています。 (2号線一ノ橋方面に走行可能) 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 13 関内みなとみらい地区 交差点の右左折およびワープ走行が可能です。 一部の エリア 14 Ver.6( 高精細 ) 東名高速道路 リアルタイムの陰影効果、夜間の街灯効果、移動物体のライティング表現、道路や壁面の表面模擬、移動物体車両への映りこ み、夜間の建物窓の反射効果が向上しました。 実在の御殿場ICから吾妻山トンネル入り口までの東名高速道路上り線、都夫良野トンネル出口付近から御殿場IC付近まで の下り線(左ルートのみ)、全長約16km。上り線では、御殿場料金所、足柄SAおよび鮎沢PAを模擬しています。 Ver.6( 高精細 ) 郊外幹線道路 総延長6.5kmの農地、住宅街、商店街を含んだ架空の郊外幹線道路を模擬しています。 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 雨雪環境模擬 雨雪による視界不良状況を再現しています。標準高速と新市街地に追加できるオプションです。 ※雨雪の量、粒の大きさ、風による傾斜、道路摩擦係数などはシナリオから設定します。 晴/積雪 Ver.5 架空の山岳道路で、全長約12kmのコースを模擬しています。急カーブ・急勾配の道路で、約1000mの高低差があります。 山岳道路 首都高 4 号線 雪 雨 オプションとして選択可能な従来からのデータベースラインナップです。 *高精細(Ver.6)版に順次対応予定 実在の幡ヶ谷から都心環状線・三宅坂JCTまでの首都高速道路で、全長約7kmの上下線を模擬しています。 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 31箇所のカーブと登坂車線があります。 夜間 雨雪 路面 ワープ ナビ オプション 高精細 走行 走行 起伏 走行 対応 事例紹介 15 事例紹介 国立大学法人広島大学 ひろしま医工連携・先進医療イノベーション拠点 / 実車シミュレータ 国立大学法人東北大学未来科学技術共同研究センター ドライビングシミュレータシステム 国立大学法人広島大学では、産学官共同研究を推進し、その研究成果を地域企業へと展開して地域 の産業活性かを図ることを目的として、ひろしま医工連携・先進医療イノベーション拠点を整備、そ の実験設備として実車シミュレータ(D3sim )を導入しました。実車シミュレータは改造していない 市販車両そのものを設置、運転できる装置であり、D3sim 側に車両情報入力機器及びインターフェ イス、実験室には排気設備を備えています。また200インチの大型/高精細の表示装置と、データ収 集装置も備えており、実車では危険を伴う実験や、均一な交通環境条件が繰り返し必要な実験等に 活用されています。今後も産学官共同研究の拠点として、安全運転システムの開発/評価、多様化す る表示システムの操作性/視認性評価等、様々な実験に活用が期待されます。 国立大学法人東北大学では、自動車走行制御まで含めたITSの研究に基づき、次世代自動車産業を 育成するための研究開発環境整備を目的として、同大学が拠点として整備しているみやぎ復興パー クにD3sim を導入しました。 本装置は150インチの高精細なリアプロジェクション方式の表示装置と6軸電動動揺装置、実車体を フルボディで備えています。震災からの東北復興につながる研究開発の推進を目指し、避難誘導方 法の検討や復興によるインフラ整備の事前検討、運転中に地震が起きた際のドライバ行動分析な どに活用が期待されています。 16 RoadTools 簡易データベース作成ツール詳細説明 道路データベース作成オプション オプションのソフトウェアの追加で、ユーザにて作成した道路データベース上をD3sim 環境にて走行できます。 また、オーダーメイドで広範囲・高精度な市街地・テストコースなどの作成も対応可能です。 RoadTools(簡易道路データベース作成・編集/自動変換・出力ソフトウェア) D3sim RoadTools は、道路データベースをユーザが簡易に作成するためのツールセットです。 GUI 操作で、直感的に道路や交差点を作成できます。作成したデータベースはすぐに D3sim 環境で走行することができます。 平面線形の作成 ・IP 法で道路の中心線を作成します。 ・IP(制御点)の座標を入力することで、 緩和曲線を含む 線形が簡単に作成 できます。 ・曲線の各パラメータは、GUI 操作 で直感的に編集できます。 ※動作に必要な計算機は含まれておりません RoadTools構成品 横断面の設定 ・平面線形上に道路の横断面として道 路テンプレートを適用します。 簡易データベース作成ツール 道路データベース作成のメインツールです。道路の平面線形を IP 法で作図し、道路テンプレートをライブラリから選択す ると、道路や交差点を自動生成します。 (道路の勾配は除きます) 信号機・道路標識・景観用のビルなどを、ライブラリから簡単に選択・設置ができます。 ※IP 法:道路線形作成時の作成方法のひとつで、前後の直線が交わる点を制御点 (Intersection Point) として作成する手法 ・すり付け機能によって、道路テンプ レート間の滑らかな接合ができ、車線 数の増減などが簡単に設定できます。 ・適用された道路テンプレートから、 平面線形の交点部分に交差点が自動 生成されます。 道路標示の設置 ・作成した平面線形に沿って、ライブ ラリから選択した道路標示を設置 できます。 ・設置した道路標示は、位置や向き を簡単に変更できます。 ・デフォルトのライブラリには速度 制限などの道路標示が登録されて います。 道路設備の設置 ・作成した平面線形に沿って、ライブ ラリから選択した道路設備を設置 できます。 ・設置した道路設備は、位置や向き を簡単に変更できます。 ・デフォルトのライブラリには規制 標識、指示標識などの道路設備が 登録されています。 道路テンプレート作成ツール 車道・白線・側帯・歩道・植樹帯などのパーツを選択・設置して、ユーザ独自の道路テンプレートを作成するツールです。 各パーツは幅・高さを変更することができます。作成した道路テンプレートは、素材ライブラリ管理ツールでライブラリ に登録して、簡易データベース作成ツールで使用します。 仮 編集画面(車道の設定) 仮 編集画面(壁・樹木の設定) 交差点の設定 ・建物や樹木などの景観モデルを設置 します。 ・交差点の領域を変更できます。 ・ライブラリから選択し、位置や向 きを指定するだけで設置できます。 ・停止線の位置や、横断歩道の位置・ 幅など、道路標示を簡単に設定で きます。 信号機の設置 簡易データベース作成ツールで使用するライブラリを編集できます。ユーザが道路テンプレート作成ツールで作成した道 路テンプレートや、市販のモデリングソフトウェアで作成したオープンフライトフォーマットの信号機・道路標識・景観 用のビルなどをライブラリに追加することができます。 地面の設置 ・道路以外の領域に地面を作成します。 ・車両用信号機と歩行者用信号機を ボタンひとつで自動設置できます。 ・領域を指定するだけで、道路の領 域は自動でくり抜かれ、作成され ます。 ・手動で信号機の位置調整や、別の 種類の信号機への置き換え・追加・ 削除などができます。 合流の作成 仮 ・デフォルトのライブラリには建物 や車両などの景観モデルが登録さ れています。 ・交差点に信号機を設置します。 テンプレート完成 素材ライブラリ管理ツール 景観の作成 ・自動生成された交差点の編集を行 います。 ・流入地点・流入方向・流入角を設定 するだけで、簡単にランプを作成で きます。 ・ゼブラ帯の長さや、合流までの並 走区間の長さを直感的に編集でき ます。 ・テクスチャはライブラリから選択 でき、デフォルトのライブラリに はアスファルト・土・草などが登 録されています。 自動変換・出力 ・ボタンひとつで D3sim タが出力できます。 用のデー ・D3sim へデータをインストール することで、作成したデータベー スを使用可能です。 編集・登録画面 事例紹介 公立大学法人岩手県立大学 / 3次元リアルタイム走行環境提示装置 公立大学法人岩手県立大学いわてものづくり・ソフトウェア融合テクノロジーセンターでは、車載ソフ トウェアに代表される自動車関連製品の研究開発や、 ドライバーの生理指標と行動の連動分析など を目的としてD3sim を導入しました。 このシミュレータは運転席に実車ボディを用い、映像表示に円 筒スクリーンを設置することで約200° の前方視界を確保し、後方視界についても実車のミラーを介 して視認できる装置を備えています。また、インパネ部分には液晶モニタを設置し、任意の画面を出 力できます。そのほか、雨雪や昼夜の走行環境模擬も可能です。人間の思考パターンに近い自動運 転技術、車両右左折時の側面衝突等の検知および回避技術、実車向け視線・顔認識装置、災害に強 い道路計画などについて産学官共同での研究開発が行われています。 17 データベース変換ツール(自動変換・出力ツール) 市販のモデリングソフトウェアで作成した道路データベースやモデルを D3sim ユーザが所有する既存データベースを有効活用することができます。 のフォーマットに変換するツールセットです。 オーダーメイド オーダーメイドで、広範囲 / 高精度 / 勾配差のある架空や実在する道路データベース作成も対応可能です。 (市街地・テストコース・高速道路) 18 ●独立行政法人交通安全環境研究所 並進装置付先進型ドライビングシミュレータ は、 独立行政法人交通安全環境研究所と三菱プレシジョン株式会社の共同開発によるものです。 ●CRAMASは 富士通テンの登録商標です。 ●CarSim/TruckSimはMechanical Simulation Corpの登録商標です。 ●dSPACEは、 ドイツdSPACE GmbHの登録商標です。 ●LabVIEWはNational Instruments社 の商標です。●MATLAB/SimulinkはThe Mathworks,Inc. の登録商標です。●プロジェクションクラスタはMitsubishi Electric Laboratories (MERL)の要素技術をもとに、三菱電機株式会社 と三菱プレシジョン株式会社が開発しています。●D3simは三菱プレシジョン株式会社の登録商標です。●その他の文中記載の社名、商品名は各社の商標または登録商標です。●カタログ の内容は予告なく改定することがあります。●表紙の画像は実際の視界表示映像と装置外観写真を合成したイメージです。 2015.5
© Copyright 2026 Paperzz