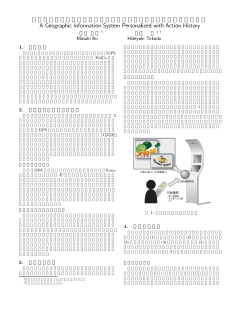
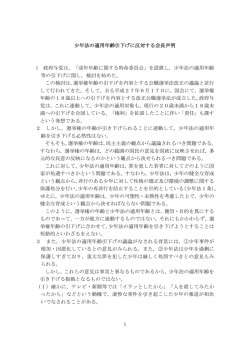
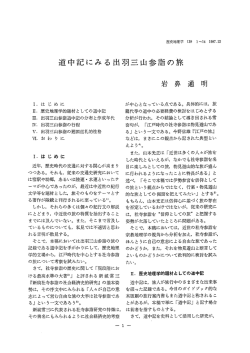
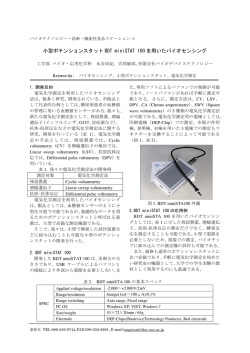
Title Author(s) Citation Issue Date 離散時間制御(発展編,<特集>初学者のための図解でわか る制御工学II) 永原, 正章 システム/制御/情報 : システム制御情報学会誌 (2012), 56(6): 298-301 2012-06-15 URL http://hdl.handle.net/2433/173754 Right システム制御情報学会 Type Journal Article Textversion author Kyoto University 298 システム/制御/情報,Vol. 56, No. 6, pp. 298–301, 2012 |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| 「『初学者のための図解でわかる制御工学 II』特集号」 発 展 編 離散時間制御 永原 正章* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| 1. y はじめに u G(s) 倒立振子の制御では,通常,D/A 変換,A/D 変換を 介して,ディジタル機器によるコントローラの実装が行 われる [3].このように,連続時間で動作する制御対象を 離散時間で動作するコントローラで制御する系をサンプ ル値制御系と呼ぶ. Sh 大学学部もしくは大学院で学ぶ標準的な制御理論の講 義では,連続時間コントローラの設計を対象としている yd 第1図 ことが多い.また,本号(および 4 月号)の「図解でわ かる」特集号の解説でも,そのほとんどは連続時間系を Kd : 想定している.それらの知識にもとづいて,コントロー Kd (z) ud Hh サンプル値制御系 σξ = AK ξ + BK yd u d = CK ξ + DK yd AK BK ⇐⇒ Kd (z) = . CK DK ラを連続時間系で設計したとしよう.その連続時間コン トローラをコンピュータに実装する場合,なんらかの方 法でコントローラを離散化する必要がある.このとき, (2) ただし,σ はシフト作用素,すなわち 連続時間系ではうまく動作するはずの制御系が,離散化 されたコントローラでも同じように動作するかどうかは, それを実際に動かしてみればある程度はわかるが,場合 (σξ)[k] := ξ[k + 1], k = 0,1,2,... によっては系が不安定となることもあり,最悪の場合, である.第 1 図の Sh および Hh はそれぞれ,サンプル 機器を破損してしまう. 周期 h > 0 の理想サンプラ,およびゼロ次ホールドであ 本稿では,上記の問題を解決する方法として,サンプ り,次式で定義される: ル値制御系の安定性を確保するための制御器の設計方 Sh : u → ud , ud [k] = u(kh), 法と,サンプル点間応答を考慮した離散時間最適レギュ Hh : yd → y, y(kh + θ) = yd [k], レータの設計方法を紹介する.これらは,90 年代初めよ k = 0,1,2,..., θ ∈ [0,h). り理論的な発展を遂げたサンプル値制御理論 [1,6] の基 礎となる考え方であり,ディジタル化が当たり前の現在 理想サンプラ Sh とゼロ次ホールド Hh はそれぞれ, では,必須の設計方法である. A/D 変換器および D/A 変換器のモデルである.この なお,信号の値の離散化(量子化)に関する話題は, 本特集号の東俊一氏の解説を参照いただきたい. 2. プル値制御系と呼ぶ. サンプル値制御系 3. 本稿では,制御対象として次の状態空間表現を持つ線 形時不変系を考える: G: ẋ = Ax + Bu y = Cx ⇐⇒ G(s) = A B C 0 して,連続時間の制御対象 G に対する連続時間コント ローラ Kc をまず設計したのち,それを何らかの方法で (1) 離散化したものをコントローラ Kd として使用するとい う方法があり,ディジタル再設計と呼ばれる. 【例題 1】 台車型倒立振子モデル [3] の台車のモデル を構成する.Kd は離散時間のコントローラであり,次 は以下で与えられる [4]. の状態空間表現を持つとする: G(s) = 京都大学 情報学研究科 Key Words : サンプル値制御系の安定性 第 1 図のサンプル値制御系を設計する一つの手段と この制御対象 G に対して,第 1 図 のフィードバック系 ∗ ように連続時間系と離散時間系が混在する制御系をサン state space representation, stability –1– b , a = 8.5879, b = 36.081 s(s + a) 299 永原:離散時間制御 r e Kr (s) − y G(s) 3 Continuous−time control Control by bilinear transform Reference 2.5 2 Ky (s) y(t) 1.5 第2図 r Sh 連続時間 I-PD 制御系 Kdr(z) Hh 1 0.5 G(s) 0 y −0.5 −1 0 Kdy(z) Sh 第4図 0.1 0.2 0.3 0.4 0.5 0.6 Time t [s] 0.7 0.8 0.9 1 I-PD 制御系のステップ応答: 連続時間制御(実線), 双一次変換による制御(破線) 第3図 Gd サンプル値 I-PD 制御系 この制御対象に対して,次の I-PD コントローラを設計 Sh : する(第 2 図を参照) u(s) = Kr (s)r(s) − Ky (s)y(s), kI kI Kr (s) := , Ky (s) := kP + + kD s. s s y yd モデルマッチング法により,I-PD コントローラのパラ u G(s) Kd (z) Hh ud メータを求めると, kI = ωn3 α1 ωn2 α 2 ωn − a , kP = , kD = b b b 第5図 離散時間系への変換 これに対処するためには,サンプラとホールドの影響 となることが知られている [4].ここで,ωn = 30, α1 = を設計に陽に含めなければならない.以下,第 1 図のサ α2 = 3 とする.このコントローラをサンプル値制御系で ンプル値制御系を安定化するための離散時間コントロー 使うために,双一次変換 ラ Kd の設計法を示す.まず,第 1 図 を 第 5 図 のよう 2 z −1 s= · h z +1 に変形する.すなわち,理想サンプラ Sh とゼロ次ホー ルド Hh を制御対象 G の側へ移動し, によってコントローラを離散化する.すなわち,離散時 Gd := Sh GHh =: c2d(G,h). 間コントローラとして 2 z −1 hkI z + 1 · · , = h z +1 2 z −1 2 z −1 Kdy (z) := Ky · h z +1 hkI z + 1 2kD z − 1 · + · = kP + 2 z −1 h z +1 とおく.この Gd は入出力ともに離散時間信号であるの Kdr (z) := Kr で,入出力関係だけを見ると離散時間系であるように見 える.実際,Gd は有限次元の線形時不変離散時間系で 記述される ([1] の Theorem 3.1.1): 【定理 1】 Gd は下記の状態空間実現を持つ: を用いて制御する.参照信号 r を単位ステップ信号とし, サンプル周期が h = 0.02 のときの制御対象の出力(台 車の位置)y(t) を第 4 図に示す.この図からわかるよう に,連続時間系では,所望の応答(ステップへの追従) Gd (z) = Ad Bd , C 0 Ad := eAh , (3) h Bd := eAt Bdt. 0 が得られているが,双一次変換により離散化した I-PD 離散時間系 Gd を連続時間系 G のステップ不変離散化 制御器を使用すると,フィードバック系は不安定になる (step-invariant discretization) と呼ぶことがある.これ は,Gd の(離散時間系としての)単位ステップ応答が, G の(連続時間系としての)単位ステップ応答を理想サ ンプラ Sh でサンプルしたものに等しいという性質に由 (すなわち,台車は激しく左右に振れて,いずれ破損し てしまう)ことがわかる. 2 双一次変換によるディジタル再設計では,一般に上記 のような問題が生じ得るので,サンプル周期が十分小さ 来する. くとれるような状況でないと使えない. (3) 式の Gd の公式を導出してみよう.任意の t1 ,t2 ∈ [0,∞), t1 < t2 に対して,線形微分方程式の解の公式よ –2– 300 システム/制御/情報 第 56 巻 第 6 号 (2012) v(t) P v(t) ∞ り,(1) 式 の状態 x(t) は下記を満たす: x(t2 ) = eA(t2 −t1 ) x(t1 ) + t2 t1 eA(t2 −τ ) Bu(τ )dτ. (4) 0 v(t) P v(t)dt = ➀+➁+➂+··· これに,t1 = kh, t2 = kh+h, k = 0,1,2,... を代入し,制 御入力 u(t) はサンプル点間 [kh,kh + h) で一定値 ud [k] ➀ ➁ ➂ ➃ をとるという性質を使って整理すると, x(kh + h) = eAh x(kh) + h eAt Bdt ud [k] h 0 0 J = が得られる.また,離散時間出力 yd は での状態とすれば,状態空間実現 (3) 式 が得られること がわかる. (5) このような制御は最適レギュレータと呼ばれ,この最小 第 5 図のフィードバック系を離散時間系の Gd と Kd 値を達成する状態フィードバックゲイン K は,Riccati のフィードバック結合とみなすと,閉ループ系の状態方 方程式により容易に求まる [5].しかし,いま我々が考え 程式は ている第 1 図のサンプル値制御系では,状態はサンプル Ad + DK C Bd CK xd xd = σ ξ BK C AK ξ 点上でしか観測されず,また制御入力 u はゼロ次ホール ドの出力,すなわち u(t) = Kx(kh) = Kxd [k], =:Acl で与えられる.このとき,以下の興味深い結果が得られ kh ≤ t < kh + h となるという前提がある.このような前提のもとで,(5) る [1] (Theorem 11.1.1): 式の評価関数を最小化する状態フィードバックゲイン K 【定理 2】 第 1 図のサンプル値制御系が内部安定,す を求めよう. なわち制御対象 G の状態 x とコントローラ Kd の状態 この目的のために,(5) 式の評価関数を次のように変 ξ がそれぞれ 形する: x(t) = 0, lim k→∞,k∈Z ξ[k] = 0 J= を満たすための必要十分条件は,行列 Acl の固有値の絶 対値が 1 未満であることである. = この定理より,第 5 図の離散時間フィードバック系に 系の安定化は,サンプル点上の振る舞いだけを考えれば kh+h k=0 kh ∞ h v(t) P v(t)dt v(kh + θ) P v(kh + θ)dθ. これは評価関数 J の離散化であり,区間 [0,∞) での 第 1 図のフィードバック系はサンプル値制御系の意味で 内部安定となるのである.したがって,サンプル値制御 ∞ k=0 0 おいて,サンプル点上だけを見て安定化すれば,もとの 積分が小区間ごとの積分の和で書けることを示している (第 6 図を見よ).ここで,(4) 式に,t1 = kh, t2 = kh+θ, k = 0,1,2,..., θ ∈ [0,h) を代入して整理すれば, θ x(kh + θ) = eAθ x(kh) + eA(θ−η) Bu(kh + η)dη よく,従来の離散時間制御理論にもとづき (3) 式 の離散 時間制御対象を安定化する離散時間コントローラをその まま用いればよい. 0 が得られる.また,プラントへの制御入力 u(t) は,サ しかし,制御性能まで考えると,サンプル点上だけで ンプル点間 [kh,kh + h) で一定値 ud [k] を取る: なくサンプル点間の応答をも考える必要がある.次節以 降,サンプル点間の制御性能を考慮した離散時間制御器 u(kh + θ) = ud [k], の設計方法について述べる. 4. 0 ∞ x(t) Qx(t) + u(t) Ru(t) dt = となる.以上より,xd [k] := x(kh) を Gd のステップ k t→∞,t∈R ∞ 3h 評価関数 J の離散化 v(t) P v(t)dt, 0 x(t) Q 0 v(t) := , P := u(t) 0 R yd [k] = y(kh) = Cx(kh),k = 0,1,2,... lim 2h 第6図 t 4h ··· k = 0,1,2,..., θ ∈ [0,h). これより, サンプル値最適レギュレータ (1) 式の制御対象において,C = I (状態フィードバッ x(kh + θ) = e Aθ θ x(kh) + eAτ Bdτ · ud [k] 0 ク)を仮定し,次の評価関数を最小化する状態フィード バックゲイン K を求める問題を考えよう: となることがわかる.したがって, –3– 301 永原:離散時間制御 θ xd [k] eAθ 0 eAτ Bdτ v(kh + θ) = ud [k] 0 I AB xd [k] = exp θ 0 0 ud [k] 1.5 =:vd [k] = eM θ vd [k]. 1 0.5 が得られる.なお,途中の行列指数関数に関する等式は, 参考文献 [1] の Lemma 10.5.1 を参照せよ.上の等式よ 0 0 り,連続時間の評価関数は J = = Pd := ∞ h vd [k] eM Sampled−data design Discretization of Kc Ideal response 2 |x(t)| =:M 2.5 θ 第7図 P eM θ vd [k]dθ k=0 0 ∞ vd [k] Pd vd [k] =: Jd , 0.5 1 1.5 Time t [s] 2 2.5 3 最適レギュレータにおける応答 |x(t)|: サンプル点 間を考慮した設計(実線),連続時間コントローラ Kc を離散化(破線),理想的な応答(細線) 本節で述べた考え方を拡張すれば,サンプル値制御系 k=0 h e M θ Pe Mθ に対する H 2 最適制御の定式化が可能となる.詳しくは, dθ. 参考文献 [1,6] などを参照いただきたい. 0 と離散時間の評価関数 Jd に等価的に変形される.以上 5. より,離散時間プラント Gd に対して,離散時間評価関 おわりに 数 Jd を最小化する状態フィードバックゲイン K を離 本稿では,サンプル値制御系における安定化と最適 散時間 Riccati 方程式にもとづいて求めればよいことが レギュレータに話題を限って,離散時間制御の基礎事 わかる.以上の方法によって得られた最適レギュレータ 項を説明した.本稿で述べた内容に関する理論の詳細 をサンプル値最適レギュレータと呼ぶ. は,参考文献 [2] 等を参考にされたい.ここで学んだ 【例題 2】 例題 1 と同じ台車のモデルを用い,台車の 内容は,現代的なサンプル値制御理論への橋渡しとな 2 つの状態,すなわち,台車の位置 y(t) と台車の速度 ẏ(t) は両方とも計測できるとして,最適レギュレータを る.ここで学んだ知識をもとに,例えば参考文献 [1, 設計する.制御対象の状態方程式は下記となる. 制御などの発展した話題に進んで欲しい. 0 1 0 ẋ(t) = x+ u, 0 −a b x(t) := y(t) ẏ(t) 6] などを読んで,サンプル値 H 2 制御やサンプル値 H ∞ 参 考 文 献 [1] T. Chen and B. Francis, Optimal Sampled-Data Control Systems, Springer (1995) http://www.control.utoronto.ca/~francis/ sd_book.pdf にてダウンロード可能. [2] 萩原,ディジタル制御入門,コロナ社,1999. [3] 川田,制御への道しるべ,システム/制御/情報,56-4 (2012) [4] 南,PID 制御,システム/制御/情報,56-4 (2012) [5] 浦久保,可制御性と状態フィードバック,システム/制御/ 情報,56-4 (2012) [6] 山本,原,藤岡,サンプル値制御理論 I–VI,システム/ 制御/情報,43-8, 10, 12 (1999), 44-2, 4, 6 (2000) ただし,a と b は例題 1 で用いたものと同じとする.(5) 式の評価関数 J の重みは, 10 Q= , R=1 01 と し た .サ ン プ ル 周 期 を h = 0.06 [s] と し て ,サ ン プル値最適レギュレータのゲインを求めると,Kd = [0.5375,0.3466] となった.一方,(5) 式の評価関数に 対 し て ,連 続 時 間 の 最 適 レ ギュレ ー タ を 設 計 す る と Kc = [1.0000,0.8165] が得られた.この Kc を第 1 図の Kd としてそのまま使って制御を行い,上のサンプル値 最適レギュレータと比較する(第 7 図).サンプル点間 著 者 略 歴 なが まさ あき 永 原 正 章 (正会員) 2003 年 3 月京都大学大学院情報学研究科 博士課程修了.同年 4 月同大学助手,2007 年 4 月同大学助教となり現在に至る.ディ を考慮した設計では,理想的な連続時間応答(連続時間 コントローラが使えたと仮定したときの応答)とほぼ同 じ制御性能が得られているが,連続時間で設計したゲイ ンをそのままサンプル値制御系に使うと,非常に性能が ジタル信号処理,サンプル値制御,ネット ワーク化制御などの研究に従事.IEEE, SICE, IEICE などの会員. 悪くなる.なお,サンプル周期 h をもう少し大きくする と,連続時間設計のゲインを使った場合は系が不安定と なる. はら 2 –4–
© Copyright 2026 Paperzz