日本バーチャルリアリティ学会第 11 回大会論文集 (2006 年 9 月)
AR Guitar: 拡張現実感を用いたギターの演奏支援システム
AR Guitar: Support System for Guitar Playing using Augmented Reality Display
元川洋一,斎藤英雄
Yoichi MOTOKAWA and Hideo SAITO
慶應義塾大学大学院 理工学研究科
(〒 223-8522 横浜市港北区日吉 3-14-1, {motokawa,saito}@ozawa.ics.keio.ac.jp)
Abstract : We propose a system that supports players to play guitar using Augmented Reality.
This system displays visual aid information onto real guitar for supporting playing guitar so that
a player can play the guitar intuitively. The important issue to construct this system is accurate
registration between visual aid information and the guitar. We propose a method for tracking the
guitar with both a vision marker and natural features of the guitar. Applying our method, this
system can display visual aid information at the proper position constantly, so that a player can
use the system in natural manner.
Key Words: Augmented Reality, support system for guitar playing, accurate registration
1.
たものがあるが [3],ピアノの場合は楽器が常に静止してい
はじめに
ギターは非常に人気のある楽器であり,多くの人々が趣
るため,位置合わせ問題は極めて単純なものになる.しか
味などでギター演奏を楽しんでいる.しかし,ギターは初心
し,ギターを演奏するときには楽器の移動が起こるため,ギ
者にとって非常に演奏が難しい楽器であるため,初心者がギ
ターの動きを追跡する,といった特別な処理が必要になる.
ター演奏を気軽に楽しむことは困難である.そこで,ギター
従来研究において,ギターの動きと同時に演奏者の手の位
演奏に対する障壁を取り除き,初心者でも気軽に楽器演奏
置をマーカによって追跡し,ギターの演奏動作をキャプチャ
を楽しめるようにするためのシステムが求められる.すで
しようという試みがあるが [4],この研究ではギターや手の
に市販されているギター演奏を支援する楽器として,左手
追跡をマーカのみの追跡に頼っているので,マーカのオク
で押さえるべき位置を曲にあわせて光らせるギター [1] があ
ルージョンや誤検出等による追跡失敗が大きな問題となり
るが,この楽器は本来のギターとは大きく構造が異なって
得る.
いる (弦の部分がスイッチになっている) ことや,演奏支援
本稿ではまず,ギターに取り付けられたマーカとギター
情報の表示方法が単にスイッチを光らせるだけと単純なも
の自然特徴の両方を利用してギターを追跡することで実現
のに限られている,といった問題点がある.
したギター演奏支援システムについて記述する.本手法で
は 2 つの情報を併用しているために,マーカのオクルージョ
本研究では,拡張現実感の技術を利用することで,ギター
の演奏支援システムを構築することを目的とする [2].本シ
ンや誤検出があっても安定な追跡が実現できる.
ステムでは,演奏支援情報をギター上に重ね合わせること
さらに,ギターにマーカを取り付ける本システムにおい
で初心者のギター演奏を支援する.拡張現実感の技術を利
てはマーカが演奏の妨げになる,といった問題点を解決す
用する利点としては,ディスプレイを通して本物のギター
るために,マーカを用いずにギターを追跡するための手法
上に仮想物体の重畳表示を行うため,本来のギターの構造
を提案し,その基礎実験結果について記述する.
を変更する必要がなく,ギターを弾いているという現実感
を損なわないという点が挙げられる.さらに,表示する仮
2.
想物体には制限がないために,多様な演奏支援情報を表示
2.1
提案手法
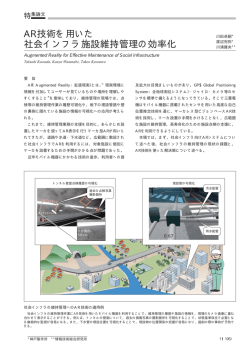
システムの概要
ここでは,本システムの概要を説明する.図 1 にシステ
することができる.
本システムを実現する上で最も重要な課題は,演奏支援
ムの概略図を示す.本システムは PC に接続されたディス
情報をギター上に正確に位置合わせをして投影することで
プレイと Web カメラから構成されている.また,ギターは
ある.本研究と類似の研究で,ピアノの鍵盤の上に手本と
AR Toolkit マーカ [5] を取り付けたものを用意する.
なる映像を投射することでピアノの学習を支援する,といっ
演奏者はマーカ付きのギターを持ち,ディスプレイの前
73
まず,P i−1 を利用して画像上にエッジのモデルを投影し,
投影されたモデルのエッジ上に一定間隔でサンプル点を設
ける.そして,各サンプル点から,モデルのエッジと直交す
る方向に沿って明度変化を調べることで対応点を探索する.
モデルのエッジ Ei と画像上の点 ei,j とが対応付けられ
たら,式 (1) によって投影誤差 E を算出する.
E=
図 1: システムの概要
1 XX
∆(Ei , ei,j )
N
i
Ã
に置かれた Web カメラの前に座る.するとディスプレイに
(1)
j
!
N
:
対応点対の数
∆(ei , pi,j )
:
Ei と ei,j 間の距離
は,ちょうど鏡を見ているかのように,ギターを持った自
式 (1) を評価関数として,最急降下法による射影行列の
分の姿が映し出される.そして,ディスプレイ中のギター
最適化を行う.
には,模範的な弦の押さえ方を示す手のモデルや,押さえ
る弦の位置を示す赤い線が演奏支援情報として表示されて
本手法において最適化させる要素は,射影行列 P の 12
いく.演奏者は,ディスプレイに映った自分の手と,演奏支
成分であるが,これらの要素には定数倍の不定性があるた
援情報が重ね合わせて表示されたギターとを照らし合わせ
め,12 番目の要素を 1 として正規化を行い,実際には 11 個
ることで,直感的にギターを演奏することができる.
の要素について最適化を行う.最急降下法によって 11 個の
2.2
要素を変化させていき,投影誤差が最小になるときの射影
手法の概要
行列を最適な射影行列として算出する.
本システムを実現するためには,入力画像列においてギ
ターを追跡することで,ギターと入力画像間の射影行列を
精度よく推定する必要がある.本手法の流れについて以下
に記述する.
まず,Web カメラで撮影された入力画像から,ギターに
取り付けられたマーカを AR Toolkit によって検出すること
で,射影行列 P を算出する.マーカ検出が失敗した場合に
は,前フレームで算出された射影行列を最適化することで
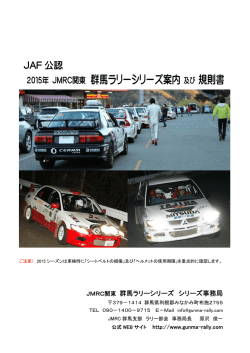
図 2: 射影行列の最適化
現フレームでの射影行列を算出する.求まった射影行列を,
仮想物体の 3 次元座標と掛け合わせることで画像座標を算
出してギター上に重畳表示する.
2.3
AR Toolkit によるマーカ検出
3.
オンライン処理では,毎フレームで AR Toolkit によっ
て自動的に入力画像中のマーカ検出が行われる.もしマー
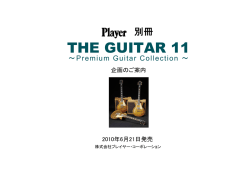
ためには,ギターの移動に合わせて,仮想物体が常に安定
カ検出が成功すれば,マーカ座標系と画像平面間の射影行
して正確な位置に投影されなければならない.そこで本実
列を即座に得ることができる.仮想物体を投影するために
験ではギターを大きく移動させてみて,仮想物体の投影状
必要な情報は 3 次元座標と射影行列のみであるため,マー
況を調べた.ギターを大きく動かした場合の結果画像列を
カ検出が成功した場合には仮想物体の投影を行うことがで
図 3 に示す.
きる.しかし,マーカの一部が隠れた場合や,マーカを誤
図 3 に示されるように,ギターが大きく移動しても,そ
検出した場合には射影行列を算出することができない.そ
れに合わせて手のモデルが正確な位置に投影されているこ
こで,マーカの追跡が失敗した場合には,以降に記述する
とがわかる.さらに,本手法ではマーカ情報とエッジ情報
処理によって射影行列を算出する.
2.4
位置合わせ実験
ユーザが本システムを違和感なく使用できるようにする
を併用しているため,図 4(a) のように,マーカ情報のみを
マーカ検出失敗時の処理
用いたときには追跡に失敗してしまうような場合でも,本
ここではマーカ検出失敗時に使用する,ギターモデルの
手法であれば安定的にギターを追跡し続けることができる.
投影とエッジ検出を利用した射影行列算出手法について記
しかし一方で,エッジの追跡のみを利用してギターの追
述する.前フレームの射影行列 P i−1 が求まっていれば,現
跡を行った場合,エッジの誤対応などの原因によって誤差
実世界に存在する自然特徴を追跡することで,マーカを利
が累積し,短時間で追跡が失敗してしまう.よって,自然特
用することなく射影行列を求め続けることができる.本手
徴としてギターのネック部の外枠のみを利用した場合,シ
法では,自然特徴の一つである物体のエッジを追跡する手
法 [6, 7] によって P i−1 を最適化して,現フレームでの P
ステムを安定にするためにはマーカの使用が必須であると
を求めることで,マーカ検出の失敗時に対応する (図 2).
言える.
74
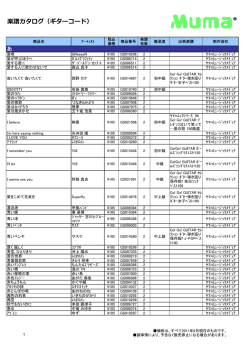
確な位置に安定して表示することが可能となっているため,
ユーザは常に正しい演奏支援情報を得ることができる.よっ
て,ユーザはただ表示されていく演奏支援情報の通りに手
を動かしてギターを弾くだけで,
「大きな古時計」を間違え
ることなく,直感的に演奏することが可能となるのである.
しかしここで,マーカを利用した本システムにおいては
1 つの問題点が存在する.それは,マーカの存在が物理的に
演奏者の邪魔になるという点である.よって,マーカを用
いずに本システムを実現することが理想的であると言える.
しかし,位置合わせ実験の章で記述したように,ギターの
ネック部のエッジのみを利用した場合では精度が不安定で
あるため,マーカの使用は必須であった.よって,マーカを
用いずに本システムを実現するためには,ギターのネック
部のエッジに加えて,より多くの自然特徴を利用する必要
があると考えられる.
図 3: ギターを大きく動かした場合の投影結果
(a) マーカ情報のみを用いた場合
図 5: システムの使用例
(b) 本手法
5.
図 4: マーカ情報のみを用いた場合との比較
マーカレスで本システムを実現するために
前章で述べたように,マーカを用いずにギターを安定し
て追跡するためには,ギターのネック部のエッジ以外の特徴
4.
システムの使用例と課題
を利用する必要があると考えられる.そこで,ギターに存
ここでは実際に提案システムの使用例を挙げながら,そ
在する自然特徴の 1 つとして,一般的なギターのネック部
の詳細について記述する.本システムを利用すると,あら
についている,フレットの位置を知るための目印 (図 6) に
かじめ曲の楽譜の情報を入力しておくことで,その楽譜情
注目する.ギターのエッジに加えてこの特徴点を入力画像
報に合わせた演奏支援情報をギター上に表示させることが
中から検出することで,ギターをより安定に追跡すること
できる.また,楽譜情報と合わせて曲の midi ファイルも用
ができると考えられる.
意しておくことにより,流れてくるメロディに合わせてコー
ド進行の部分の演奏支援情報が表示され,コード進行のみ
を自分で演奏する,といった使い方もできる.実際にギター
演奏の初心者が本システムを利用して「大きな古時計」を
演奏している様子を撮影したものを図 5 に示す.あらかじ
め登録された曲「大きな古時計」の情報をシステムが参照
し,曲の流れに合わせて,ギターのどの場所を押さえて演
図 6: ギターの特徴点
奏すればよいかという情報が次々と切り替わって表示され
ていく.ここで,提案手法により仮想物体がギター上の正
75
5.1
特徴点検出手法
特徴点検出手法の概要図を図 7(a)∼(f) に示す.まず,入
力画像に Canny のエッジ検出を行い,Hough 変換によって
画像中からネック部の外枠の上下のエッジを検出する.こ
の処理により,特徴点の存在範囲を 2 直線の間の領域に限
定することができる.次に,入力画像を一定のしきい値に
よって 2 値化を行い,細め・太め処理によって弦やフレット
を消去する.さらに,先ほどの Hough 変換によって得られ
た 2 直線間以外の領域を除去し,残った領域においてラベ
リング処理を行う.そしてラベルの面積やラベル同士の位
置関係の情報を利用することで,検出したい特徴点のラベ
ルを特定する.
5.2
検出結果
図 8: 特徴点の検出結果
以上の処理によって得られた結果画像が図 8 である.そ
れぞれの特徴点を正しく検出することができ,特徴点のギ
ター追跡への利用が期待できる結果が得られた.
さらに,入力画像からギターのネック部上の特徴点を自
動で検出する手法を提案した.今後,本手法を発展させる
ことで,マーカを用いることなく本システムを実現したい.
参考文献
[1] http://www.yamaha.co.jp/
(a) 入力画像
[2] 元川洋一,斎藤英雄: 拡張現実表示技術を用いたギター
(b) Hough 変換
の演奏支援システム,インタラクション 2006 論文集,
pp.177–178 (2006).
[3] 樋川直人, 大島千佳, 西本一志, 苗村昌秀: The PHANTOM of the PIANO:自学自習を妨げないピアノ学習
支援システムの提案,インタラクション 2006 論文集,
pp.69–70 (2006).
[4] Ozan Cakmakci and Francois Berard: An Augmented
(c) 2 値化
(d) 細め・太め
Reality Based Learning Assistant for Electric Bass
Guitar, In Proc. 10th International Conference on
Human - Computer Interaction (2003).
[5] 加藤博一, Mark Billinghurst, 浅野浩一 , 橘啓八郎: マー
カ追跡に基づく拡張現実感システムとそのキャリブレー
ション, 日本バーチャルリアリティ学会論文誌, Vol.4,
No.4, pp.607–616 (1999).
(e) 領域の限定
(f) 特徴点の特定
[6] Luca Vacchetti, Vincent Lepetit, Pascal Fua: Combining Edge and Texture Information for Real-Time
図 7: 特徴点検出手法
Accurate 3D Camera Tracking, In Proc. of the Third
IEEE and ACM International Symposium on Mixed
6.
and Augmented Reality (ISMAR 2004), pp.48–57
おわりに
(2004).
本研究では,拡張現実感の技術を利用してギター演奏の
[7] Georg Klein and Tom Drummond: Sensor Fusion and
方法を PC のディスプレイを通してユーザに提示するギター
Occlusion Refinement for Tablet-based AR, In Proc.
の演奏支援システムを構築した.
of the Third IEEE and ACM International Sym-
また本システムを実現するために,AR Toolkit による
posium on Mixed and Augmented Reality (ISMAR
マーカ認識と,エッジ情報を利用した最適化処理を使い分
2004), pp.38-47 (2004).
けることによる,リアルタイムで動く安定した位置合わせ
手法を提案した.また,実験により本手法の正確性や安定
性について検証した.
76
© Copyright 2026 Paperzz