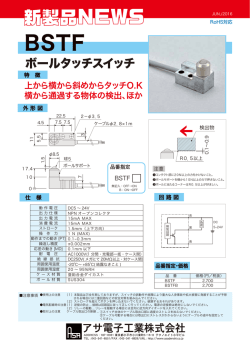
サービスロボット用位置センサシステム PA-R100 service robot sensor system 既存のサービス ロボットと位置 センサが連携す る事で、 ロボットの が可能。 ・ 赤外線コードによる位置認識のためロボット位置制御が柔軟に行え、なおかつ容易。 ・ メインセンサは8つの赤外線コードを同時受信可能な構造。 ・ 位置センサはロボットに搭載するメインセンサとロボット動作許可空間に配置され たエコーセンサの組み合わせで動作。 ・ ロボットに搭載されたメインセンサを起点として信号(問い合わせ)を発信し、その 信号を感知した個々のエコーセンサが信号(個別コード)を返す。メインセンサに 返されてきた信号(個別コード)の受信方向から動作許可空間内でのロボットの 立ち位置、及び向きを認識する事が可能。 ・ 既存のサービスロボットに搭載可能なコンパクトなサイズ。 サービスロボット用位置センサシステム PA-R100 製品仕様 商品構成 メインセンサ CPU 基板 IR 送受信ユニット 1個 (以下2ユニットから構成) エコーセンサ 4個 リモコン基板 1個 通信 通信方式 赤外線 中心周波数 38 KHz 通信速度 2.5 Kbps (MAX) 同期方式 調歩同期方式 通信フレーム 3BYTE∼255BYTE (可変) 誤り検出 CRC 8 メインセンサ (フェイスオプション追加仕様) 外形 メインセンサ CPU基板 I R送受信 ユニット 100(W) × 40(H) × 10(D) φ 標準: 62(MAX) × 43(H) フェイスオプション追加時 : φ 62(MAX) × 73(H) エコーセンサ 66(W) × 88(H) × 36(D) リモコン基板 40(W) × 60(H) × 10(D) 電源 メインセンサ 5V エコーセンサ 2.5 V∼3.3 V 消費電流 メインセンサ 200mA 以下 エコーセンサ 50mA 以下 リモコン基板 50mA 以下 エコーセンサ 動作温度 5℃∼50℃ 保存温度 --20℃∼70℃ この製品は、岩手県花巻市のきらり機械設計有限会社と 共同開発いたしました。 使用特許 特開 2009-192247 きらり機械設計(有) 温度 111109PD
© Copyright 2026 Paperzz