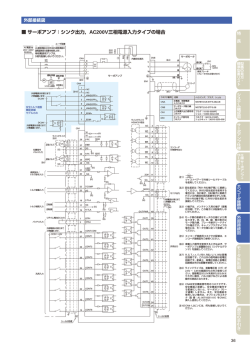
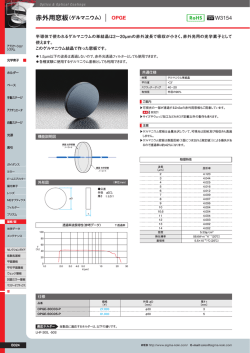
DC SERVO SYSTEMS DC サーボシステム Ver. 3 最適運転のセットアップが簡単にできます。 オートチューニング 試運転機能(ジョグ機能) 新アルゴリズムを用いたイナーシャ同定機能と 5 種類 サーボモータ・サーボアンプ間の接続を確認できるジョ のオートチュー ニング特 性の選 択,30 段 階の応 答 性 グ機能を搭載しており,上位コントローラと接続するこ の設定やパラメータの自動保存機能により,応答性を となく試運転ができます。 高めたオートチューニングが実現できます。 上位コントローラと 接続せずに試運転ができます。 速度指令値 チューニング開始 速度検出値 ※セットアップソフトウェアが必要です。 海外規格取得 オールインワン制御 サーボアンプは標準仕様でUL,c-UL,EN規格を取得 トルク・位置・速度制御を,パラメータを切り換えること しています。サーボモータは,EN規格を取得したもの により使い分けることができます。 もお選びいただけます。 位置 or 速度 トルク制御 上 り 坂 T R TA S 1 平 坦 路 GO AL 特 長 複数軸モニタ機能 セットアップソフトウェアにより,パラメータの設定や位 セットアップソフトウェアは,サーボアンプを最大15 軸 置,速度,トルクなどのモニタ波形のグラフィック表示, までモニタリングできます。 最大 15台 ※ DCサーボシステム ※パソコン接続用ケーブル 型番:AL-00490833-01 (オプション) ※パソコン接続用ケーブル (オプション) オプション 保護等級 IP43 全機種,保護等級はIP43 です。 水 ACサーボシステム 接続図 ※ 外形図 最大15軸までを デイジーチェーンで接続できます。 セットアップソフトウェア パラメータの設定 位置,速度,トルクモニタ波形 仕 様 システム構成図 さらにシステムアナリシスなどがおこなえます。 型番の見方 セットアップソフトウェア ほこり IP43 ※軸貫通部,ケーブル端を除きます。 2 システムの精度が向上し,サイクルタイムを短縮できます。 高応答 制振制御 位相遅れを低減させる 4 段ノッチフィルタにより,機械 フィードフォワード制振制御により,簡単な調整で機械 系の共振を抑制し,装置の速度応答性を向上させる 先端の振動や機台振動を抑制できます。また,振動を ことができます。 制御する周波数を 4 種類設定し,選択して使用すること ができます。 停止時 位置偏差 振動抑制制御あり 振動抑制制御なし 10 ゲイン 0 100ms/div -10 制振制御 あり (dB) -20 制振制御 なし -30 -40 1 5 10 周波数 (Hz) 50 100 500 1000 ※17bitのアブソリュートエンコーダが必要です。 位置決め整定時間の短縮 外乱抑制 新アルゴリズムの採用により,装置の位置決め整定 適用周波数を広げた新外乱オブザーバにより,多軸構成 時間を大幅に短縮できます。 の場合,他の軸からの影響を抑制することができます。 位置偏差 位置決め完了信号 整定時間(0ms) 高剛性機械における位置決め整定例 5ms/div ※17bitのエンコーダが必要です。 3 電力損失を 30%削減 高分解能のインクリメンタルエンコーダ,アブソリュート 電力損失を 30%削減できる低損失パワーモジュールの エンコーダに適した制御ができます。 採用により,主回路の電力損失を 30%低減させました。 100% 90% 仕 様 80% 70% 60% 接続図 50% 40% 30% 0% 従来機 SANMOTION T セットアップソフトウェア 10% 外形図 20% オプション 分 1 ,0 4 8 , 5 7 6 分 割 電力損失の低減率 最 大 解能 システム構成図 高分解能 型番の見方 特 長 ランニングコストが 削減できます。 4 サーボモータ 標準型番リスト 定格出力 23W モータ外形寸法 φ 41mm エンコーダ ― インクリメンタルエンコーダ(PP031)1000P/R ― 40W φ 41mm タコジェネレータ モータ巻線仕様 ― 付き ― T404-011 T404T-011 ― ― ― 付き インクリメンタルエンコーダ(PP031)1000P/R ― 60W ― ― φ 51mm 付き インクリメンタルエンコーダ(PP031)1000P/R 110W φ 51mm ― インクリメンタルエンコーダ(PP031)1000P/R 200W φ 76mm ― インクリメンタルエンコーダ(PP031)1000P/R 300W φ 76mm ― インクリメンタルエンコーダ(PP031)1000P/R 400W φ 87.5mm ― インクリメンタルエンコーダ(PP031)1000P/R 500W φ 87.5mm ― インクリメンタルエンコーダ(PP031)1000P/R T402-011EL8 ― ― φ 41mm T402T-011 24V 系 付き 付き インクリメンタルエンコーダ(PP031)1000P/R 型番 T402-011 ― 75V 系 T404T-012 24V 系 T404-011EL8 75V 系 T404-012EL8 24V 系 T406-011 75V 系 T406-012 24V 系 T406T-011 75V 系 T406T-012 24V 系 T406-011EL8 75V 系 T406-012EL8 24V 系 T506-011 75V 系 T506-012 24V 系 T506T-011 75V 系 T506T-012 24V 系 T506-011EL8 75V 系 T506-012EL8 ― 付き T404-012 T511-012 75V 系 T511T-012 ― T511-012EL8 ― T720-012 付き 75V 系 ― T720-012EL8 ― 付き T720T-012 T730-012 75V 系 T730T-012 ― T730-012EL8 ― T840-012 付き 75V 系 T840T-012 ― T840-012EL8 ― T850-012 付き ― 75V 系 T850T-012 T850-012EL8 掲載型番以外の仕様についてはお問い合わせください。 5 サーボアンプ 標準型番リスト インクリメンタルエンコーダ TS1AA2AA 30A インクリメンタルエンコーダ TS1A03AA タコジェネレータ(モータ形式 T4 用) TS1A02AN タコジェネレータ(モータ形式 T5 用) TS1A02AP 25A タコジェネレータ(モータ形式 T5,T7 用) TS1AA2AP 30A タコジェネレータ(モータ形式 T8 用) TS1A03AP 20A インクリメンタルエンコーダ TS1B02AA 25A インクリメンタルエンコーダ TS1BA2AA 20A タコジェネレータ(モータ形式 T4 用) TS1B02AN タコジェネレータ(モータ形式 T4 用) TS1BA2AN タコジェネレータ(モータ形式 T5 用) TS1BA2AP 20A DC24V パルス列,速度, トルク DC50V 速度,トルク 25A 掲載型番以外の仕様についてはお問い合わせください。 電源ユニット 出力容量 型番 5A TS1PA0500 10A TS1PA1000 15A TS1PA1500 型番の見方 25A システム構成図 TS1A02AA 仕 様 インクリメンタルエンコーダ 特 長 型番 20A DC140V 速度,トルク 検出器 接続図 パルス列,速度, トルク アンプ容量 外形図 制御方式 セットアップソフトウェア 制御電源 オプション 主回路電源 6 サーボモータ/電源ユニット型番の見方 ■サーボモータ 例) 「SANMOTION T」のサーボモータで,定格出力200W・モータ外径76mm・インクリメンタルエンコーダ (1000 P/R) ・ブレーキ・タコジェネレータ・ギヤ (ギヤ比1/15) ・電圧仕様75V系列を選択される場合,下記の型番です。 T7 形式 20 モータ外形寸法 T4‥‥‥‥‥ φ41 T5‥‥‥‥‥ φ51 T7‥‥‥‥‥ φ76 T8‥‥‥‥‥ φ87.5 B T G6 01 ブレーキ 仕様識別 B ‥‥‥‥ 付き 01‥‥ 標準 1‥‥ 24V系列 2‥‥ 75V系列 なし‥‥‥ なし インクリメンタルエンコーダ アブソリュートエンコーダ ギヤ モータ形式 型番 ギヤ比 GA GB GC G1 G2 G3 G4 G6 G7 G8 G9 1/12.5 1/25 1/50 1/15 1/30 1/60 1/90 1/15 1/30 1/60 1/90 T4 T5 形式 T7 形式 なし‥‥ 標準 U‥‥ UL準拠 モータ巻線仕様 T ‥‥‥‥ 付き 形式 ラインドライバ出力 型番 パルス数 EL8 EL0 E59 EAL8 EAL0 EA59 EA51 EA53 1000 2000 2500 1000 2000 2500 5000 10000 エンコーダ種別 型番 ビット数 通信速度 A12 A22 17 20 2.5Mbps 2.5Mbps PP031 PP031T 高速応答仕様 ・無表示:エンコーダなし ※T4タイプでのタコジェネレータ・エンコーダの取り付けは, どちらか一方のみになります。 また,ブレーキ・オイルシールを取り付けることはできません。 ※定格出力が 23W,40W,60Wのモータはモータ巻線仕様を 24V系列にすることができます。 ■電源ユニット TS 1 P Tシリーズ A 10 ‥電源ユニット 05‥‥ 5A 10‥‥ 10A 15‥‥ 15A 入力電圧 注) 個別仕様 ‥AC100V又はAC35V (共用) ‥標準仕様 注)モ ー タ巻 線 仕 様 が 75V 系 列 の 場合はAC100Vを 24V 系列の場 合はAC35Vをそれぞれ供給して ください。 7 00 出力容量 ユニット種別 U 他‥‥ オプション タコジェネレータ 定格出力 EL8 (オイルシールなし) なし‥‥‥ なし 02‥‥ 23W 04‥‥ 40W 06‥‥ 60W 11‥‥ 110W 20‥‥ 200W 30‥‥ 300W 40‥‥ 400W 50‥‥ 500W 2 ■サーボアンプ 例) 「SANMOTION T」のサーボアンプで,入力電圧DC140V,アンプ容量20A,インクリメンタルエンコーダ A システム構成図 Tシリーズ A サーボアンプ容量 検出器のハード種別 注) 02 ‥‥‥‥ 20A A2 ‥‥‥‥ 25A 03 ‥‥‥‥ 30A A ‥‥ インクリメンタルエンコーダ(ラインドライバ出力のみ) F ‥‥ アブソリュートエンコーダ N ‥‥タコジェネレータ(モータ形式T4用) P ‥‥ タコジェネレータ(モータ形式T5, T7, T8用) 入力電圧 注) タコジェネレータの場合は海外規格 (UL,c-UL,EN規格) を取得していません。 サーボモータ種別 A ‥‥DC140V B ‥‥DC50V 外形図 ‥‥ ロータリモータ 1 )組み合わせサーボモータ注) サーボアンプ サーボモータ型番 T404-012 T406-012 T506-012 T511-012 T720-012 T730-012 T840-012 T850-012 TS1A02A TS1AA2A TS1A03A DC50V 入力仕様 出荷時の設定 ○ サーボアンプ サーボモータ型番 TS1B02A T402-011 出荷時の設定 ○ ○ オプション DC140V入力仕様 仕 様 02 接続図 A セットアップソフトウェア TS1 型番の見方 (1000 P/R) を選択される場合,下記の型番です。 特 長 サーボアンプ型番の見方 ○ 2 )組み合わせエンコーダ注) 計測方式 光学 光学 光学 計測方式 光学 分解能 [P/R] 1000 2000 2500 インクリメンタルエンコーダ 略称 ハード区別 A INC-E A INC-E A INC-E 伝送方式 半二重調歩同期 2.5M 分解能 [P/R] 17bit 出荷時の設定 ○ アブソリュートエンコーダ 多回転部 略称 16bit PA035C-2.5MH ハード区別 F 備考 出荷時の設定 ○ 3 )組み合わせタコジェネレータ モータ形式 タコジェネレータ種別 ハード区別 T4 T5, T7, T8 3V / 1000min-1 7V / 1000min-1 N P 4 )制御部のインタフェース注) 制御部のインタフェース 速度制御型 トルク制御型 位置制御型 速度 トルク切替型 位置 トルク切替型 位置 速度切替型 内部速度制御型 出荷時の設定 ○ 注) 組み合わせサーボモータ,組み合わせエンコーダ,制御部のインタフェースは,セットアップソフトウェアにより変更してください。 8 システム構成図 制御電源 DC24V 出力 配線用遮断器(MCCB) ノイズフィルタ 電磁接触器 主電源 AC100V 50/60Hz 電 源ラインの 保 護 のために 使用します。 過電流が流れると, 電源をオフ します。 電源ラインからの 外来ノイズを防ぐ ために取り付けます。 サーボ電源をオン・オフします。 サージプロテクタを付けて 使用してください。 ブレーキ電源 ブレーキ付きのサーボモータ の場合に使用します。 9 電源ユニット DC140V 出力 特 長 型番の見方 C N 2 接続図 C N 3 AL-00490833-01 仕 様 CN5 システム構成図 パソコンとの通信に より, パラメータの設 定やモニタリングが できます。 C N 5 CN2 CN1 当社の上位コントローラは もちろん, 他社製品も接続 できます。 オプション C N 4 C N 1 セットアップソフトウェア 外形図 上位装置 ブレーキ付きの場合に必要な配線 10 一般仕様 ■サーボアンプ+サーボモータ組み合わせ 適用アンプ型番 適用モータ型番 条件 記号 単位 アンプ電源(主電源) アンプ使用温度・湿度 アンプ質量 定格出力 ★ 定格回転数 ★ 最高回転数 ★ 定格トルク ★ 連続ストールトルク ★ 瞬時最大ストールトルク ★ 定格電機子電圧 ★ 定格電機子電流 ★ 連続ストール電機子電流 ★ 瞬時最大ストール電機子電流 ★ トルク定数 ☆ 誘起電圧定数 ☆ 電機子抵抗 ☆ 定格パワーレート ★ 電気的時定数 ☆ 機械的時定数 ☆ 適用負荷イナーシャ PR NR Nmax TR TS TPS ER IR IS IP KT KE Ra OR tC tm JL エンコーダパルス数(出力回路方式) ロータイナーシャ(エンコーダ含む) JM モータ質量(エンコーダ含む) ブレーキ保持トルク ★ ブレーキ励磁電圧 ☆ ブレーキ励磁電流 ☆ ブレーキイナーシャ ブレーキ質量 TB VB IB JB TS1A02AA T402-011EL8 T404-012EL8 DC24V +10, -15% DC50V +10, -15% DC140V +10, -15% 温度:0 ~ 55℃ 湿度:90% 以下(結露なきこと) 0.2 0.2 0.45 23 40 3000 3000 0.061 0.080 0.070 0.120 0.206 0.319 20 72 1.9 1.0 1.9 0.9 4.9 2.1 0.047 0.174 4.9 18.2 3.2 18.6 1.2 2.1 0.35 0.35 7.1 4.8 0.16 × 10-4 0.27 × 10-4 1000( ラインドライバ ) 0.055 × 10-4 0.092 × 10-4 0.55 0.65 アンプ電源(制御電源) 電源容量(定格時) TS1B02AA kVA kg W min-1 min-1 N・m N・m N・m V A A A N・m/A V/kmin-1 Ω kW/s ms ms kg・m2(GD2/4) P/R kg・m2(GD2/4) kg N・m V A kg・m2(GD2/4) kg ー モータ使用温度・湿度 ー ー ー ー ー ー ー ー ー 温度:0 ~ 40℃ 湿度:90% 以下(結露なきこと) ★印は標準アンプとの組合せで温度上昇飽和時の値です。各値はTYP.値です。 ☆印は巻線温度25℃時の値です。各値はTYP.値です。 0.4 トルク(N・m) トルク(N・m) アンプ+モータ特性図 0.4 0.3 0.2 0.1 0.3 0.2 瞬時領域 0.1 連続領域 連続領域 0 11 瞬時領域 1000 2000 速度(min-1) 3000 0 1000 2000 速度(min-1) 3000 0.116 × 10-4 0.75 ー ー ー ー ー 0.4 0.2 0.3 連続領域 1000 2000 速度(min-1) 3000 瞬時領域 0.2 0.1 0.1 0 1000 2000 速度(min-1) 0.6 瞬時領域 0.4 0 型番の見方 2.0 1.5 1.0 瞬時領域 0.5 連続領域 3000 システム構成図 1.478 × 10-4 2.05 1.47 90 0.11 0.09 × 10-4 0.59 0.2 連続領域 仕 様 0.605 0.658 1.47 80 3.4 3.7 7.7 0.23 24.2 2.8 2.7 1.1 7.8 4.43 × 10-4 0.8 トルク(N・m) トルク(N・m) トルク(N・m) 瞬時領域 200 接続図 0.137 0.175 0.441 70 1.4 1.4 2.9 0.177 18.5 11.8 3.2 0.37 4.1 0.34 × 10-4 0.6 トルク(N・m) 60 0 T720-012EL8 DC24V +10, -15% DC140V +10, -15% 温度:0 ~ 55℃ 湿度:90% 以下(結露なきこと) 0.3 0.4 0.45 60 110 3000 3000 0.156 0.270 0.192 0.358 0.441 0.784 75 75 1.2 2.0 1.3 2.2 2.8 4.5 0.183 0.21 19.1 21.8 12.1 5.1 1.7 3.2 0.47 0.63 7.4 4.3 0.68 × 10-4 1.13 × 10-4 1000( ラインドライバ ) 0.228 × 10-4 0.378 × 10-4 0.9 1.2 0.29 90 0.06 0.01 × 10-4 0.26 温度:0 ~ 40℃ 湿度:90% 以下(結露なきこと) 0.3 0.3 T511-012EL8 外形図 T506-012EL8 セットアップソフトウェア T406-012EL8 0.4 特 長 TS1AA2AA オプション TS1A02AA 1000 2000 速度(min-1) 連続領域 3000 0 1000 2000 速度(min-1) 3000 12 一般仕様 TS1 アンプ+ T モータ 組合せ仕様 ■サーボアンプ+サーボモータ組み合わせ 適用アンプ型番 適用モータ型番 条件 記号 単位 アンプ電源(主電源) アンプ使用温度・湿度 アンプ質量 定格出力 ★ 定格回転数 ★ 最高回転数 ★ 定格トルク ★ 連続ストールトルク ★ 瞬時最大ストールトルク ★ 定格電機子電圧 ★ 定格電機子電流 ★ 連続ストール電機子電流 ★ 瞬時最大ストール電機子電流 ★ トルク定数 ☆ 誘起電圧定数 ☆ 電機子抵抗 ☆ 定格パワーレート ★ 電気的時定数 ☆ 機械的時定数 ☆ 適用負荷イナーシャ PR NR Nmax TR TS TPS ER IR IS IP KT KE Ra OR tC tm JL エンコーダパルス数(出力回路方式) ロータイナーシャ(エンコーダ含む) JM モータ質量(エンコーダ含む) ブレーキ保持トルク ★ ブレーキ励磁電圧 ☆ ブレーキ励磁電流 ☆ ブレーキイナーシャ ブレーキ質量 TB VB IB JB TS1A03AA T730-012EL8 T840-012EL8 DC24V +10, -15% DC140V +10, -15% 温度:0 ~ 55℃ 湿度:90% 以下(結露なきこと) 0.9 1.0 0.45 0.65 300 400 2500 2500 1.00 1.66 1.05 1.70 2.45 3.72 75 85 5.2 5.8 5.5 6 10.9 13.7 0.273 0.31 28.6 32.9 1.1 0.95 5.1 5.0 1.5 2.0 4.0 5.2 8.12 × 10-4 15 × 10-4 1000( ラインドライバ ) 2.708 × 10-4 5.008 × 10-4 2.75 3.65 1.47 1.96 90 90 0.11 0.11 0.09 × 10-4 0.2 × 10-4 0.59 0.79 温度:0 ~ 40℃ 湿度:90% 以下(結露なきこと) アンプ電源(制御電源) 電源容量(定格時) TS1AA2AA kVA kg W min-1 min-1 N・m N・m N・m V A A A N・m/A V/kmin-1 Ω kW/s ms ms kg・m2(GD2/4) P/R kg・m2(GD2/4) kg N・m V A kg・m2(GD2/4) kg モータ使用温度・湿度 ★印は標準アンプとの組合せで温度上昇飽和時の値です。各値は TYP. 値です。 ☆印は巻線温度 25℃時の値です。各値は TYP. 値です。 1.5 4.0 瞬時領域 トルク(N・m) トルク(N・m) アンプ+モータ特性図 2.0 1.0 0.5 3.0 瞬時領域 2.0 1.0 連続領域 連続領域 0 13 1000 2000 速度(min-1) 3000 0 1000 2000 速度(min-1) 3000 [KVA] [Kg] 0.70 0.75 0.80 特 長 型番の見方 質量 システム構成図 電源ユニット使用温度・湿度 電源容量(定格)AC100V 時 TS1PA05 TS1PA10 TS1PA15 AC100V +10%,-15% 又は AC35V +10%,-15% 5 10 15 温度 :0~55° C 湿度 :90% 以下(結露なきこと) 1.4 2.8 4.2 仕 様 電源ユニットの定格出力電流 DC24V +10, -15% DC140V +10, -15% 温度:0 ~ 55℃ 湿度:90% 以下(結露なきこと) 1.3 0.65 500 2500 2500 1.76 1.90 4.21 80 7.6 7.6 17.6 0.287 30 0.56 6.4 1.9 4.1 18 × 10-4 ラインドライバ 1000( ) 6.008 × 10-4 4.25 1.96 90 0.11 0.2 × 10-4 0.79 温度:0 ~ 40℃ 湿度:90% 以下(結露なきこと) [V] [A] 接続図 T850-012EL8 単位 外形図 電源ユニットの入力電圧 セットアップソフトウェア 電源ユニット型番 TS1A03AA オプション ■電源ユニット仕様 トルク(N・m) 4.0 3.0 瞬時領域 2.0 1.0 連続領域 0 1000 2000 速度(min-1) 3000 14 0.19 1.2 0.34 2.0 3000 0.24 1.8 1.3 10 0.42 3.4 2.2 18 5000 0.02 1.7 81.8×103 0.009×10-3 0.183 19.1×10-3 0.022×10-3 12.1 5.7 7.4 0.47 20 2.8 0.022 3.2 91.9×103 0.013×10-3 0.21 21.8×10-3 0.037×10-3 5.1 3.2 4.3 0.63 30 2.4 105 0.65 0.95 7×10-3±10% 1 3 特 長 型番の見方 200 80 0.64 3.4 3000 0.77 5.4 3.7 25 5000 0.04 2.7 36.7×103 0.020×10-3 0.23 24.2×10-3 0.147×10-3 2.8 3.0 7.8 1.1 30 1.2 105 1.8 システム構成図 110 75 仕 様 60 T720-012 接続図 60 70 0.19 1.4 3000 0.20 1.2 1.4 7.6 5000 0.020 3.2 111×103 0.008×10-3 0.177 18.5×10-3 0.0108×10-3 11.8 4.4 4.1 0.37 25 3.0 105 0.5 3×10-3±10% 2 5 T511-012 外形図 T506-012 セットアップソフトウェア T406-012 オプション 1 37 5 26 4.1 10 0.0011×10-3 0.09 0.012×10-3 0.26 0.29 90 0.06 1600 0.001×10-3 0.26 200 500 1000 P/R 1000 2000 2500 5000 10000 P/R 1/15 1/30 1/60 1/90 ─ ─ ─ ─ ─ ─ 1/12.5 1/25 1/50 ─ 0.35 1.47 90 0.11 820 0.009×10-3 0.59 取付可能 電流 Ia 速度 N (A) (min-1) 5000 10 25 5000 電流 Ia 速度 N (A) (min-1) 50 5000 電流 Ia 速度 N (A) (min-1) 25 5000 電流 Ia 速度 N (A) (min-1) 20 4000 20 4000 6 3000 15 3000 15 3000 40 4000 30 3000 20 2000 10 1000 0 0 電 流 Ia V) 80 V= N( 度 速 連続使用領域 V) Ia 流 電 瞬 V N( 0 1 2 トルクT (N・m) 3 使用 領域 0) ) 0 反復 =4 5V 37. 0 領域 度 速 V= トルクT (N・m) 1.5 使用 域 N( 1.0 反復 領 用 使 時 速度 0.5 Ia 75 V= 域 用領域 0 0 N( 度 速 領 用 トルクT (N・m) 0 1.0 1000 反復使 ) 0.5 5 Ia V 37.5 0 2000 流 電流 = N( V 域 領 用 速度 使 0 10 連続使用領域 ) 時 反復使用 領域 V) =35 N(V 速度 0 使 1000 時 5 瞬 1000 2000 75V V= N( 速度 連続使用領域 2 10 瞬 2000 V) 70 V= N( 度 速 連続使用領域 4 電 領域 使用 4000 瞬時 8 0 2 4 トルクT (N・m) 16 モータ アース タコジェネレータ 特 長 ■結線方法 ブレーキ 取付可能 40 2000 20 速度 N( V =80 1000 瞬時 使用 速度 N( V 0 0 5 領域 反復使 =40 0 V) 用領域 V) 10 トルクT (N・m) 15 システム構成図 (橙) モータ回転方向 (赤) +(青) -の時出力軸より見て反時計方向 タコジェネレータ極性 仕 様 出力軸より見て反時計回転の時(赤) +(青) - 定 格 連続(S1) 耐熱クラス F(UL対応品はA種) 接続図 ■共通仕様 永久磁石 励磁方式 絶縁耐力 外形図 10M 以上(DC500Vメガー) AC50Hz又は60Hz,1500V(24V仕様及び TGは600V)1分間(ただし,エンコーダ間との 絶縁抵抗 正逆転可能 。 0∼40 C 湿度 20∼90%RH(結露しないこと) 塗装色 黒色 保護方式 全閉(IP43) リード線長 1000mm オプション 周囲温度 セットアップソフトウェア 絶縁テストは行わないでください。) 回転方法 ■ギヤ定格 型番 減速比(公称値) 減速比(詳細値) 定格トルク 瞬時最大トルク 質量 適合モータ 型番 型番 Ia 流 電 (赤) (橙) 減速比(公称値) 減速比(詳細値) 定格トルク 瞬時最大トルク 質量 適合モータ モータ銘板表示 ギヤ型番 TRG TPG WG N・m N・m kg モータ銘板表示 ギヤ型番 TRG TPG WG N・m N・m kg モータ銘板表示 ギヤ型番 TRG TPG WG N・m N・m kg G6 G8 GA G6-12 1/12.5 1/12.5 0.5 1.5 GB G6-25 1/25 1/25 1.0 3.0 0.4 T4 形式 GC G6-50 1/50 1/50 2.0 6.0 G1 G8-15 1/15 1/15.004 1.0 3.0 G2 G8-30 1/30 1/31.155 2.0 6.0 G3 G8-60 1/60 1/60.227 4.0 12.0 G4 G8-90 1/90 1/89.588 4.0 12.0 0.6 T5 形式 G10 型 ギ ヤ 3000 (緑/黄)(青) 型 ギ ヤ 60 連続使用領域 4000 (青) 減速比(公称値) 減速比(詳細値) 定格トルク 瞬時最大トルク 質量 適合モータ 電流 Ia 速度 N (A) (min-1) 80 (赤) 型 ギ ヤ 500 80 1.96 7.6 2500 2.16 16.7 7.6 62 3000 0.07 6.4 27.8×103 0.058×10-3 0.287 30.0×10-3 0.60×10-3 0.56 1.1 4.1 1.9 40 1.0 105 4.0 7×10-3±10% 1 3 1 26 4.1 10 0.012×10-3 0.45 1.96 90 0.11 820 0.02×10-3 0.79 200 500 1000 P/R 1000 2000 2500 5000 10000 P/R 1/15 1/30 1/60 1/90 型番の見方 T850-012 G6 G10-15 1/15 1/15.303 3.8 12.0 G7 G10-30 1/30 1/30.066 7.5 23.0 G8 G10-60 1/60 1/60.132 15.0 45.0 G9 G10-90 1/90 1/90.198 15.0 45.0 1.5 T7 形式 注1) ギヤ付の場合ギヤの定格トルク・瞬時最大トルクを超えて使用しないでください。 注 2) ギヤの瞬時最大トルクを超えてご使用しますとスラスト荷重の影響で,エンコーダなどに悪影響をおよぼす場合があります。 18 エンコーダ仕様 ■標準仕様 エンコーダ種別 適合モータ型式 単位 出力パルス数 P/R 回転ディスク スリット数 逓倍数 出力回路方式 チャンネル数 電源電圧 消費電流 V.DC mA 出力回路電圧 V.DC PP031T(高速応答仕様) PP031 T4 ・T5 ・T7 ・T8 タイプ 1000 1024 1250 2000 2048 2500 4000 4096 5000 8000 8192 10000 500 512 625 ×2 ×4 ×8 ×16 T4 ・T5 ・T7 ・T8 タイプ 200 500 1000 200 500 1000 ラインドライバ 出力回路電流 応答周波数 パルスデューティサイクル 出力相互位相差 フラッタ 動作温度 発光素子 受光素子 3 +5±10% 160 以下 VOH=2.4min,VOL=0.5max at l0=±20mA 20max 0 ~800 mA kHz イナーシャ kg 0.25 質量 ラインドライバ 70 以下 +30 以下 (出力トランジスタOFF時) 160 以下 VOH=2.4min,VOL=0.5max at l0=±20mA 20max 20max 0 ~300 0 ~300 T1=1/2T0±1/8T0 T2~5=1/4T0±1/8T0 (T0max-T0min) /T0≦0.08 -10 ~+85 (エンコーダ内雰囲気) ─ -10 ~+85 (エンコーダ内雰囲気) 赤外発光ダイオード フォトIC 0.00008×10-3 200 500 1000 2000 2500 3 +5±10% ─ kg・m2 ×1 オープンコレクタ R1 ~Rn=10 ~50% ℃ 200 500 1000 2000 2500 赤外発光ダイオード フォトダイオード 200P/R:0.00003×10-3, 500 ・1000 ・2000 ・2500P/R:0.00008×10-3 0.25 ■出力波形(PP031T 高速応答仕様) ■外部結線 ●ラインドライバ出力(モータ出力軸より見て反時計方向回転の時) リード線色別 オープンコレクタ 赤 黒 シールド 青 茶 緑 紫 白 黄 ラインドライバ +DC5V GND(0V) +DC5V GND(0V) ケースアース Aチャンネル出力 ─ Bチャンネル出力 ─ ─ C チャンネル出力 ケースアース A チャンネル出力 — A チャンネル出力 B チャンネル出力 — B チャンネル出力 C チャンネル出力 — C チャンネル出力 注) 1)取り扱い時,スラスト方向への衝撃は,絶対に加えないでください。 2)電子回路を破損する恐れがありますので,エンコーダの絶縁抵抗および 絶縁耐力テストは避けてください。 3)オープンコレクタタイプの結線についてリード線色,茶・紫・白色は 内部結線されておりません。 ■出力波形(PP031) ●オープンコレクタ出力(モータ出力軸より見て反時計方向回転の時) Aチャンネル ー Aチャンネル Bチャンネル ー Bチャンネル Rn R1 R2 R3 R4 R5 R6 R7 R8 R9 Cチャンネル ー Cチャンネル (1パルス/1回転) 出力相互位相差:Rn(n=1∼出力パルス数×4) 出力相互位相差: Rn(n=1 ~ 出力パルス数×4) (360度÷パルス数を100%とし,出力相互位相差を%表示する。) (360 度÷パルス数を 100%とし、出力相互位相差を%表示する。) ●ラインドライバ出力(モータ出力軸より見て反時計方向の時) T0(注) T0(注) T1 T1 Bチャンネル T2 Cチャンネル T3 T4 T0 Aチャンネル Aチャンネル T0 Aチャンネル T5 Bチャンネル Bチャンネル T6 = T0 ± 0.4T0 T2 (1パルス/1回転) T3 T4 T5 Cチャンネル Cチャンネル T6 = T0 ± 0.4T0 (1パルス/1回転) 注)T0 とは,エンコーダを定速で一周させた時の各周期の平均値です。 T0 : 電気角で 360 度です。 19 特 長 過負荷デューティサイクル特性 電機子電流Ia TL 負荷率= ×100= ×100 TS ストール電機子電流Is 計算例(V850-012) 150%負荷率で, %ED 40%とすると, 過負荷デューティ サイクル特性曲線から 負荷時間tR=3 (分) です。 したがって tR 負荷時間率%ED= ×100 tR+tF 100 ( ) 100 100 ( )( ) 休止時間tF=tR ̶ I %ED 負荷率 1 300 0% dut y T404,T506 300 (%) 20% 20% 200 30% 60% 100 0.1 0.5 1 5 10 負荷時間 tR(分) 50 60% 100 0.1 100 負荷率 負荷率 T406 300 10% duty (%) 1 5 10 負荷時間 tR(分) 50 100 50 100 T511,T720,T730,T840 300 10% d uty 20% 20% 200 30% 40% 150 50% 30% 40% 150 50% 60% 100 0.1 負荷率 (%) 0.5 250 250 200 30% 40% 150 50% 40% 150 50% (%) uty 250 250 200 10% d セットアップソフトウェア 負荷率 (%) T402 (分) 休止時間 tF=tR ̶ I =3 ̶ I =4.5 40 %ED つまり連続ストールトルクに対し150 %過負荷で 3 分間 運転した場合は, 4.5分間の休止時間が必要です。 システム構成図 tF 仕 様 tR ください。 外形図 デューティサイクル特性曲線から算出 TS:連続ストールトルク TL:負荷トルク tR:負荷時間(分) tF:休止時間(分) オプション 場合,運転ができる時間t Rは過負荷 接続図 ような過負荷にて反覆的に駆動する 型番の見方 「SANMOTION T」を 右 図 に示 す 0.5 1 5 10 負荷時間 tR(分) 50 100 0.5 1 5 10 負荷時間 tR(分) 50 100 60% 100 0.1 0.5 1 5 10 負荷時間 tR(分) T850 10% d uty 300 250 20% 200 30% 40% 150 50% 60% 100 0.1 20 外部接続図 サーボモータ型番の見方 ■位置制御型 ハウジング:DK-3100S-05R コンタクト:DK-3RECLLP1-100 ハウジング:DK-3100S-03R コンタクト:DK-3RECLLP1-100 ユーザ装置 制御電源 24VDC 主電源 100Vac 50/60Hz 注9) MC 電源ユニット NFB 1 2 -DC 3 +DC 4 -DC 5 注9) 注7) CN4 CN3 +DC +DC -DC +DC -DC MB サーボアンプ 140V DC M 緑/黄 CN2 非常停止 注2) ラインドライバ HD26C31相当 正転パルス 逆転パルス SG 16 F-PC 17 F-PC 15 SG 18 R-PC 19 R-PC 20 SG 1 ラインレシーバ HD26C32相当 SG SG 偏差クリア CLR SH プラグ:10114-3000PE ハウジング:10314-52A0-008 SG SG CONT-COM1 A 21 A 22 B 23 B 24 C 25 C 26 注1) ツイストペアーで外被シールドケーブ ルを使用してください。 A A B B C 注2)シ ー ルド処 理は,グランドプレ ート付ケ ー ブルクランプのため,リード線のシ ー ルド をケ ーブルクランプにはさみ込む事により, シールド接続ができます。 注3)モータ側の接続はモータの仕様により異な ります。 C DC5V∼24V 2 注4) 90V (24V) 保持ブレーキ (ブレーキ付のみ 取り付け) ラインドライバ HD26C31相当 +5 +5 SG 注6) SH RY1 橙 エンコーダ分周信号出力 SG エンコーダ +5 +5 CN1 注5) 注8) 橙 赤(白) 2 MC システム異常 サーボモータ 青(黒) 注3) 1 3 運転準備 運転準備 入 切 MC 位 置 指 令 パ ル ス 入 力 MA 24V DC 注4)エンコーダ接 続 用コネクタの配 線は,エン 注6) CONT1 DC5V, DC12V∼24V コーダ接続をご参照ください。 注5)指 令パルス入 力をオープンコレクタ出 力と 汎 用 3 P制御 PCON 4 入 力 サーボオン SON CONT2 OUT1 7 運転準備完了出力 SRDY OUT2 8 偏差零出力 INP OUT-COM3 9 OUT3 接続する場合は,下図の様にしてください。 CONT-COM2 5 CONT3 6 CONT4 16 正転パルス 15 18 警報リセット RST 逆転パルス COMMON 汎 10 警告コード出力 ALM4 用 OUT4 11 警告コード出力 ALM2 OUT5 12 警告コード出力 ALM1 出 SH 20 注6)外部電源は,お客さまでご準備願います。 力 注7)UL規格準拠および,IECまたはEN規格準拠 の漏電遮断機の設置を推奨します。 注8)差 動 入 力 信 号のSGは必ず接 続してくださ い。 未接続の場合,ノイズによる誤作動や 破損につながる原因となることがあります。 注9)制御電源用のDC電源は,100V又は,200V OUT-COM4 13 の一次電源から,二重又は,強化絶縁され COMMON た電源をご使用ください。 SH 注2) プラグ:10126-3000PE ハウジング:10326-52A0-008 ■速度・トルク制御型 ハウジング:DK-3100S-03R コンタクト:DK-3RECLLP1-100 ハウジング:DK-3100S-05R コンタクト:DK-3RECLLP1-100 ユーザ装置 制御電源 24V DC 主電源 100Vac 50/60Hz 注7) MC 電源ユニット NFB 1 2 -DC 3 +DC 4 -DC 5 注7) 注6) CN4 CN3 +DC +DC -DC +DC -DC MA 24V DC MB サーボアンプ 140V DC 2 赤(白) 3 緑/黄 MC システム異常 非常停止 注2) CN1 VCMD/TCMD SG SG 注5) 14 V-REF /T-REF 15 SG 20 SG 1 SG CONT-COM1 DC5V∼24V (偏差クリア CLR) 汎 2 P制御 PCON 3 エンコーダ + SG A 21 A 22 B 23 B 24 C 25 C 26 A B B C 注1) ツイストペアーで外被シールドケーブ ルを使用してください。 注2)シ ー ルド処 理は,グランドプレ ート付ケ ー ブルクランプのため,リード線のシ ー ルド をケ ーブルクランプにはさみ込む事により, シールド接続ができます。 注3)モータ側の接続はモータの仕様により異な C CONT2 サーボオン SON 警報リセット RST CONT-COM2 5 CONT3 6 ります。 注4)エンコーダ接 続 用コネクタの配 線は,エン DC5V, DC12V∼24V コーダ接続をご参照ください。 注5)外部電源は,お客さまでご準備願います。 OUT1 7 運転準備完了出力 SRDY OUT2 8 低速度出力 LTG OUT-COM3 9 COMMON 汎 OUT3 10 警告コード出力 ALM4 用 OUT4 11 警告コード出力 ALM2 OUT5 12 警告コード出力 ALM1 OUT-COM4 13 注6)UL規格準拠および,IECまたはEN規格準拠 の漏電遮断機の設置を推奨します。 CONT4 注7)制御電源用のDC電源は,100V又は,200V の一次電源から,二重又は,強化絶縁され SH た電源をご使用ください。 出 力 COMMON SH 注2) プラグ:10126-3000PE ハウジング:10326-52A0-008 21 90V (24V) 保持ブレーキ (ブレーキ付のみ 取り付け) A CONT1 4 橙 ラインドライバ HD26C31相当 - 注6) 入 RY1 SH SH 注4) プラグ:10114-3000PE ハウジング:10314-52A0-008 用 力 橙 M エンコーダ分周信号出力 速ト 度ル 指ク 令指 /令 入 力 青(黒) CN2 運転準備 運転準備 入 切 MC サーボモータ 注3) 1 電源ユニット / エンコーダ / タコジェネレータ外部接続図 サーボモータ型番の見方 ハウジング:DK-3100D-12R コンタクト:DK-3RECLLP1-100 ユーザ装置 MC L1 1B AC35V 3A P 3B DC2(2軸目) 2B N 3A 50/60Hz 2A P L2 2B 又は DC1(1軸目) 1B N 2A サーボアンプへ供給 1A P DC3(3軸目) 3B N 4A P DC4(4軸目) 4B N 5A P DC5(5軸目) 5B N 6A P DC6(6軸目) 6B N R1 R2 1 2 CN3 注1)回生処理が必要となる場合 ハウジング:VHR-2N コンタクト:SVH-21T-P1.1 型番の見方 主電源 AC100V 50/60Hz CN2 電源ユニット 1A システム構成図 CN1 仕 様 ハウジング:DK-3100D-06R コンタクト:DK-3RECLLP1-100 特 長 ■電源ユニット 回生抵抗 ■エンコーダ 接続図 注1) サーボモータ CN2 青 茶 緑 紫 白 黄 赤 黒 1 2 3 4 5 6 7 8 11 12 13 14 A チャンネル入力 A チャンネル入力 B チャンネル入力 B チャンネル入力 C チャンネル入力 C チャンネル入力 注2)+DC 5V 注2)GND(0V) インクリメンタルエンコーダ A チャンネル入力 A チャンネル入力 B チャンネル入力 B チャンネル入力 C チャンネル入力 C チャンネル入力 +DC 5V GND(0V) オプティカル エンコーダ FGシールド 注1) セットアップソフトウェア Tシリーズ サーボアンプ オプション TS1シリーズ 外形図 インクリメンタルエンコーダ リード線タイプ 注2) プラグ:10114-3000PE, シェル:10314-52A0-008 注1) ツイストペアーで外被シールドケーブルを使用してください。 注2) エンコーダ電源の接続はエンコーダケーブル長により異なります。下の表に従ってください。 エンコーダケーブル長 5m以下 13ピン接続 +DC5V配線 (7,11ピンは接続不要) GND 0V 配線 14ピン接続 (8,12ピンは接続不要) 10m以下 11,13ピン接続 (7ピンは接続不要) 12,14ピン接続 (8ピンは接続不要) 20m以下 7,11,13ピン接続 8,12,14ピン接続 ■タコジェネレータ タコジェネレータ Tシリーズ TS1シリーズ サーボモータ サーボアンプ CN2 タコジェネレータ TG+ TG− 赤 青 3 4 TG プラグ:10114-3000PE, シェル:10314-52A0-008 22 サーボモータ外形図 ■サーボモータ T モータリード線 G T 4-LZ LR QK T4・T5形式 LA (L1) LG LE LC NP Q D U T QK S LB W QA アース線 LL T7・T8形式 Mタップ フカサLT (単位:mm) 型番 LL T402 55 T404 69 T406 82 LG L1 LA LB LE LC G LZ LR D S Q 55 34-0.025 34-0.025 2 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 48 ± 0.2 56 42 3.5 81 T511 101 T720 100.5 T730 124.5 T840 134 T850 149 5 8 8 67 87 83 107 113 128 W T 7-0.009 7-0.009 20 51 7-0.009 7-0.009 20 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 24 ± 0.5 41 U — 15 スリワリ 2 ヶ所 6.5 — 68 T506 QK — 42 5 QA — — 15 M LT — — — — — — — — — — 2 M5 8 2 M6 10 スリワリ 2 ヶ所 6.5 ■エンコーダ付サーボモータ T モータリード線 G T 4-LZ QK T4・T5形式 LA エンコーダリード線 LL LR (L1) LE (L2) LG アース線 LC NP Q S LC G QK D LB W QA U T T7・T8形式 Mタップ フカサLT (単位:mm) 23 型番 LL T402 83 T404 96 LG L1 L2 LA LB LE LZ LR D S Q 55 T406 109 68 T506 110.5 67 T511 130.5 T720 134.5 T730 159 T840 166 T850 181 5 8 8 87 83 107 113 128 QK W T U — 42 5 QA 48 ± 0.2 34-0.025 34-0.025 22 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 36 90 ± 0.3 34-0.025 70-0.030 3 100 76 38 100 ± 0.3 34-0.025 80-0.030 3 112 88 18 2 56 42 41 7-0.009 7-0.009 24 ± 0.5 51 7-0.009 7-0.009 20 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 3.5 24 ± 0.5 20 — 15 スリワリ 2 ヶ所 6.5 M LT — — — — — — — — — — — — 2 M5 8 2 M6 10 — 15 スリワリ 2 ヶ所 6.5 ■タコジェネレータ付サーボモータ (L1) LE LC NP Q D S LB システム構成図 QK QA W (L2) LG 型番の見方 T4・T5 形式 LA タコジェネレータリード線 LL U T T7・T8 形式 Mタップ フカサLT (単位:mm) 型番 LL T402 87.5 T404 98 T406 111 T506 124.5 T511 144.5 T720 148.5 T730 172.5 T840 183 T850 198 LG L1 L2 LA LB LE LC G LZ LR D S Q QA 55 18 48 ± 0.2 34-0.025 34-0.025 2 56 42 3.5 24 ± 0.5 41 7-0.009 7-0.009 20 — 8 87 83 107 113 128 U 15 スリワリ 2 ヶ所 6.5 — M LT — — — — — — — — — — 22 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 51 7-0.009 7-0.009 20 36 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 2 M5 8 38 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 2 M6 10 — 15 スリワリ 2 ヶ所 6.5 セットアップソフトウェア 8 67 T — 68 5 W — 42 5 QK T 4-LZ T5形式 LA モータリード線 LR QK (L1) LE QK D S LB W ブレーキリード線 NP Q U T アース線 LL (L2) LG LC QA オプション T ■ブレーキ付サーボモータ G 仕 様 4-LZ LR QK 接続図 T 外形図 T モータリード線 G 特 長 アース線 T7・T8形式 Mタップ フカサLT (単位:mm) 型番 LL T506 118 T511 144.5 T720 138.5 T730 162.5 T840 169.5 T850 184.5 LG 5 8 8 L1 67 87 83 107 113 128 L2 LA LB 36 60 ± 0.3 34-0.025 50-0.025 LE LC G LZ 2.5 69 54 4.5 40 90 ± 0.3 34-0.025 70-0.030 3 100 76 40 100 ± 0.3 34-0.025 80-0.030 3 112 88 LR D S 24 ± 0.5 51 7-0.009 7-0.009 Q QA 20 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 — — QK 15 W T U M LT — — — — 2 M5 8 2 M6 10 スリワリ 2 ヶ所 6.5 24 サーボモータ外形図 ■エンコーダ・ブレーキ付サーボモータ アース線 T G T 4-LZ LL LR QK T5形式 LA ブレーキリード線 モータリード線 (L1) LE NP Q QK QA D S LB W エンコーダ リード線 (L3) LG LC U T (L2) T7・T8形式 Mタップ フカサLT (単位:mm) 型番 LL T506 147 T511 167 T720 172.5 T730 196.5 T840 203 T850 218 LG 5 8 8 L1 67 87 83 107 113 128 L2 L3 LA LB LE LC G LZ LR D S Q QA — QK W T U M LT — — — — 36 22 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 51 7-0.009 7-0.009 20 38 35 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 2 M5 8 40 35 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 2 M6 8 15 — スリワリ 2 ヶ所 6.5 ■タコジェネレータ・ブレーキ付サーボモータ T T 4-LZ LR QK T5形式 LA タコジェネレータ アース線 リード線 モータリード線 G LE LC NP QK QA D S LB W ブレーキ リード線 (L3) LG Q U T LL (L2) (L1) T7・T8形式 Mタップ フカサLT (単位:mm) 25 型番 LL T506 161 T511 181 T720 186.5 T730 210.5 T840 219.5 T850 234.5 LG 5 8 8 L1 67 87 83 107 113 128 L2 L3 LA LB LE LC G LZ LR D S Q QA — QK W T U M LT — — — — 38 42 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 51 7-0.009 7-0.009 20 40 44 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 2 M5 8 38 44 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 2 M6 8 — 15 スリワリ 2 ヶ所 6.5 (L1) LE LC NP Q システム構成図 D S LB W エンコーダ リード線 QK QA U T (L3) (L2) LG 型番の見方 T5形式 LA T7・T8形式 Mタップ フカサLT (単位:mm) 型番 LL T506 153.5 T511 173.5 T720 182 T730 206 LG 5 8 216 T850 223.5 8 87 83 107 113 128 L2 L3 LA LB LE LC G LZ LR D S Q QA — QK W T U M LT — — — — 38 27 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 51 7-0.009 7-0.009 20 38 40 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 2 M5 8 38 42 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 2 M6 8 — 15 スリワリ 2 ヶ所 6.5 セットアップソフトウェア T840 L1 67 仕 様 4-LZ タコジェネレータ リード線 アース線 LL LR QK 接続図 T 外形図 T モータリード線 G 特 長 ■エンコーダ・タコジェネレータ付サーボモータ T モータリード線 G T 4-LZ LR QK T5形式 LA (L1) LE アース線 LL (L2) (L3) オプション ■エンコーダ・タコジェネレータ・ブレーキ付サーボモータ タコジェネレータリード線 エンコーダ リード線 (L4) LG ブレーキリード線 LC NP Q D U T QK S LB W QA T7・T8形式 Mタップ フカサLT (単位:mm) 型番 LL T506 190 T511 210 T720 220 T730 246 T840 253.5 T850 268.5 LG 5 8 8 L1 67 87 83 107 113 128 L2 L3 L4 LA LB LE LC G LZ LR D S Q QA — QK W T U M LT — — — — 38 42 22 60 ± 0.3 34-0.025 50-0.025 2.5 69 54 4.5 24 ± 0.5 51 7-0.009 7-0.009 20 38 44 35 90 ± 0.3 34-0.025 70-0.030 3 100 76 5.5 30 ± 0.8 76 14-0.009 14-0.011 25 2 20 5 5 2 M5 8 38 44 35 100 ± 0.3 34-0.025 80-0.030 3 112 88 6.6 35 ± 0.8 87.5 16-0.011 16-0.011 30 2 25 5 5 2 M6 8 — 15 スリワリ 2 ヶ所 6.5 26 ギヤ外形図 ■ギヤ外形図 / T4 形式用 (単位:mm) 32±0.5 0 47 27 5 26.5±1 5 16 17 12 A 10 0.3 0± 7 φ φ8−0.015 4− φ4.5 φ18±0.5 □60 A 断面 A̶A 7 ■ギヤ外形図 / T5 形式用 □82 2 51 0 A A +0.024 4+0.012 0 15 ± 94 φ44−0.025 φ 3 0. φ12−0.018 4 −φ6.6 断面 A̶A 0 1.5−0.2 4 0± 12 0 φ 3 0. 0 A 断面 A̶A 0 2−0.2 5 27 78 17 A +0.024 5+0.012 2 32±1 3 20 20 4 −φ6.6 φ40−0.025 □100 φ15−0.018 ■ギヤ外形図 / T7 形式用 サーボアンプ/電源ユニット外形図 ■ サーボアンプ (単位:mm) 特 長 TS1 □02 □/TS1 □A2 □ (60) 50 仕 様 112 120 システム構成図 ø5 取付方向 上 90 4 2− 25 型番の見方 5 アース端子ビス M4 接続図 TS1 □03 □ (60) 90 25 オプション 120 112 セットアップソフトウェア ø5 2− 4 75 取付方向 上 外形図 5 アース端子ビス M4 ■ 電源ユニット 10 120 11.5 5 60 40 1.6 CN3 4− ø5 120 133 143 取付方向 上 アース端子ビス M4 28 セットアップソフトウェア ①セットアップソフトウェア起動時 ②メイン画面 ③パラメータの設定 a.一般パラメータの設定 (パラメータの設定,保存,読み込みなどがパソコンから操作でき ます。) b.モータパラメータの設定 (組み合わせモータをパソコンから設定・変更することができます。) ④モニタ機能 a.モニタ表示 (運転状態,入出力信号の状態をモニタできます。) c.アラーム履歴表示 (現在および過去のアラーム発生状況を確認できます。) 29 b.マルチモニタ表示 (パソコン用ケーブルで接続された複数のサーボアンプの運転状態を 同時にモニタできます。) b.パルス送りジョグ c.オートノッチフィルタチューニング d.システムアナリシス (パソコンから移動量,移動速度を入力し,簡 単にモータを動作させることができます。) ⑥運転トレース機能 (サーボシステムの周波数特性を測定できます。) オプション (ノッチフィルタを適切な値に設定できます。) セットアップソフトウェア 外形図 接続図 (パソコンから速度指令を入力し,簡単にモータを 動作させることができます。) 仕 様 a.速度ジョグ システム構成図 型番の見方 特 長 ⑤試運転と調整機能 (サーボモータの速度,トルク,内部状態などを グラフィックスで表示します。) 30 オプション ■パソコン接続用ケーブル (単位:mm) 2850 型番:AL-00490833-01 CN1 ケーブル 9 1 ※RS-232C通信 お客様でご用意されたパソコンに 接続してご利用いただけます。 アンプ側 PC側 ■サーボアンプ接続用コネクタ 内容 コネクタ単体 型番 メーカ名 CN1(プラグ,ハウジング) AL-00608709 CN2(プラグ,ハウジング) AL-00608710 CN3(ハウジング,コンタクト) AL-00608711 CN4(ハウジング,コンタクト) AL-00608712 CN1,2(プラグ,ハウジング) コネクタセット AL-00608713 CN3,4(ハウジング,コンタクト) メーカ型番 10126-3000PE + 10326-52A0-008/ 54306-2619 + 54331-0261 10114-3000PE + 10314-52A0-008/ 住友スリーエム(株)/モレックス(株) 54306-1419 + 54331-0141 第一電子工業(株) DK-3100S-05R + DK-3RECLLP1-100/ /タイコエレクトロニクスアンプ(株) 1-178288-5 + 1-175218-2 第一電子工業(株) DK-3100S-03R + DK-3RECLLP1-100/ /タイコエレクトロニクスアンプ(株) 1-178288-3 + 1-175218-2 10126-3000PE + 10326-52A0-008/ 住友スリーエム(株) 10114-3000PE + 10314-52A0-008/ /モレックス(株) 54306-2619 + 54331-0261 54306-1419 + 54331-0141 DK-3100S-05R + DK-3RECLLP1-100/ 第一電子工業(株) DK-3100S-03R + DK-3RECLLP1-100/ /タイコエレクトロニクスアンプ(株) 1-178288-5 + 1-175218-2 1-178288-3 + 1-175218-2 住友スリーエム(株)/モレックス(株) 注1)CN1,2 … 住友スリーエム (株)製とモレックス (株)製の製品は同一規格です。 注2)CN3,4 … 第一電子工業(株)製とタイコエレクトロニクスアンプ (株)製の製品は同一規格です。 *コンタクトの圧着工具も両方に使用できます。 ■電源ユニット接続用コネクタ 内容 コネクタ単体 CN1(ハウジング,コンタクト) AL-00632983 型番 CN2(ハウジング,コンタクト) AL-00632984 CN3(ハウジング,コンタクト) AL-00632985 メーカ名 第一電子工業(株) /タイコエレクトロニクスアンプ(株) 第一電子工業(株) /タイコエレクトロニクスアンプ(株) 日本圧着端子製造 ( 株) AL-00632986 第一電子工業(株) /タイコエレクトロニクスアンプ(株) CN1,2(ハウジング,コンタクト) コネクタセット CN3(ハウジング,コンタクト) 日本圧着端子製造 ( 株) メーカ型番 DK-3100D-06R + DK-3RECLLP1-100/ 178289-3 + 1-175218-2 DK-3100D-12R + DK-3RECLLP1-100/ 178289-6 + 1-175218-2 VHR-2N + SVH-21T-P1.1 DK-3100D-06R + DK-3RECLLP1-100/ DK-3100D-12R + DK-3RECLLP1-100/ 178289-3 + 1-175218-2 178289-6 + 1-175218-2 VHR-2N + SVH-21T-P1.1 注1) CN1,2・・・第一電子工業(株)製とタイコエレクトロニクスアンプ (株)製の製品は同一規格です。 *コンタクトの圧着工具も両方に使用できます。 は電源ユニットに付属しています。 注2) コネクタセット (AL-00632986) ■ブラシ(メンテナンス部品) 適合モータ 型番 T4 形式モータ用 T5 形式モータ用 T7 形式モータ用 T8 形式モータ用 T4 形式モータ タコジェネレータ用 T5 形式モータ タコジェネレータ用 T7,T8 形式モータ タコジェネレータ用 S441898-1A-02 S441899-1A-02 S442425-1A-02 S442427-1A-02 B-5143024-1 S30407-1B-85 S30402-1B-85 ■外付回生抵抗器 回生電力[PM] 10W 以下 30W 以下 55W 未満 55W 以上 型番 抵抗値 許容電力[PRO] 50 Ω 10W 50 Ω 30W 50 Ω 55W 20 Ω お問い合わせください REGIST-080W50B REGIST-120W50B REGIST-220W50B REGIST-220W20B サーモスタット b接点 ■外付回生抵抗器外形図 (単位:mm) REGIST-120W50B 300 270 質量:0.19kg シリコンゴムガラス編組線 AWG20 0.5mm2白 (サーモスタット) シリコンゴムガラス編組線 AWG18 0.75mm2黒 シリコンゴムガラス編組線 AWG20 0.5mm2白 (サーモスタット) シリコンゴムガラス編組線 AWG18 0.75mm2黒 20 1.2 20 1 6 6 φ4.3 20 シリコンゴムガラス編組線 AWG18 0.75mm2黒 31 300 270 60 42.7 42 23.5 4.3 4.3 シリコンゴムガラス編組線 AWG20 0.5mm2白 (サーモスタット) 230 220 200 6 6 φ4.3 6 44 26 φ4.3 6 REGIST-220W20B, REGIST-220W50B 300 270 質量:0.24kg 1.2 132 122 100 182 172 150 4.3 REGIST-080W50B 質量:0.44kg 32 オプション セットアップソフトウェア 外形図 接続図 仕 様 システム構成図 型番の見方 特 長 33 引合チェックシート ご照会またはご注文の際は,次の事項をお知らせください。 なお,ご質問,ご要望がありましたらご連絡ください。 お客さま会社名 年 月 日 部署名 電話番号 (03)3917-4141 お電話番号 FAX番号 (03)5394-3427 FAX番号 1:用途 2:機械名 3:台数 質 問 項 目 内 容 対象装置名 装置,分類(搬送機・加工機・試験機・その他) サーボ使用軸名 軸,軸機構(水平軸・垂直軸),ブレーキ機構(有・無) 上記軸の現状 メーカ名( ) シリーズ名( ) モータ容量( ) 油圧・機械式・新規 位置決め精度 ± mm・± μm 【参考式】 加速度α:__G・___[m/s2] 【1G=9.8[m/s2]、1[m/s2]≒0.1G】 送り速度V:____[m/s] 動作パターン 送り速度 移動距離D:___[m] [m/sec] メカ機構 機械構造 【α[m/s2]=V[m/sec]÷t1[sec]】 【D[m]=V[m/sec]×(t1+t2)[sec]】 (ストローク) ボールねじ・ねじ回転型(水平),ボールねじ・ナット回転型(水平),ラック&ピニオン(水平) ベルト/チェーン(水平),ボールねじ・ねじ回転型(水平),回転テーブル,ロールフィード,不安定 WT(テーブル質量) kg WL(ワーク質量) kg WA(その他駆動部質量) kg WR(ラック質量) kg WB(ベルト/チェーン質量) kg WC(カウンターバランス質量) kg Fa(軸方向外力) N Fb(ボールねじ予圧) N T(ロール押付け力) N Dr1(駆動側ロール径) mm Dr2(従動側ロール径) mm Lr1(駆動側ロール長) mm Lr2(従動側ロール長) mm JG(減速機イナーシャ) kg・m2 JC(カップリングイナーシャ) kg・m2 JN(ナットイナーシャ) Db(ボールねじ直径) kg・m2 JO(その他のモータ軸換算イナーシャ) mm Lb(ボールねじ軸長) mm G(減速比) kg・m2 Pb(ボールねじリード) mm Dp(ピニオン/プーリ径) mm Lp(ピニオン軸長) mm tp(プーリ厚み) mm Dt(テーブル径) mm Dh(テーブル支持径) mm LW(負荷軸ずれ距離) mm Ds(テーブルシャフト径) mm Ls(テーブルシャフト長) mm ρ(ボールねじ/ピニオン/プーリ/テーブルシャフト材質比重) kg・cm3 μ(摺動面/支持部/ロールとシートの摩擦係数) ρ1(ロール1材質比重) ρ2(ロール2材質比重) κ(予圧ナットの内部摩擦係数) kg/cm3 η(機械効率) TF(モータ軸換算の摩擦トルク) 減速機 検出器種別 N・m kg/cm3 JL(モータ軸換算の負荷イナーシャ) kg・m2 Tu(モータ軸換算のアンバランストルク) N・m お客さまにてご用意〔 / 〕・山洋電気標準〔遊星・平歯・バックラッシュレス遊星 / 〕その他〔 / 〕 エンコーダ 機種指定(有・無) 有∼(インクリメンタルエンコーダ,アブソリュートエンコーダ) 分解能( ) タコジェネレータ " # $ % & ' 入力形態 位置・速度・トルク・その他〔 〕 上位機器(コントローラ) シーケンサ・パソコン・お客さま開発品・当社製品・その他( ) 使用環境などで要求される事柄 切削加工・クリーンルーム内での使用・防塵対策・その他( ) 生産台数見込み 単発品・ 台/月・ 台/年 開発スケジュール 試作時期: 年 月頃,量産時期: 年 月頃 希望連絡方法 関連資料(手渡し済み・後日郵送希望) 訪問PR希望(有・無) 打合せ希望(有・無) その他、特記事項 (質問事項や懸案事項、解決したい内容など) 34 注意 注意 ●製品をご使用いただく前に必ず取扱説明書をお読みください。 ●人命に関わる医療機器などの装置へ適用される際は, 事前に当社へご連絡をいただき, 安全対策を十分におとりください。 ●社会的・公共的に重大な影響を及ぼす装置などに適用される際は事前に当社へご連絡ください。 右記注意事項が守られない場合, 中程度の傷害や 軽傷を受ける可能性, 物的損害の発生が想定され ます。また,状況によっては重大な結果に結びつく ●車載・船舶など振動が加わる環境での使用はできません。 ●装置の改造・加工は行わないでください。 ●本カタログのアンプは一般産業用途向けです。航空・宇宙関係, 原子力,電力, 海底中継機器などの特殊用途に 適用される際は事前に当社へご連絡ください。 可能性があります。必ず守ってください。 ※上記についてのご質問・ご相談は,当社営業部門へお問い合わせください。 CATALOG No.762-10 ‘09.11.N
© Copyright 2026 Paperzz