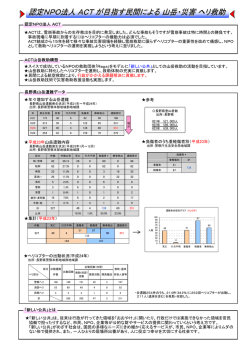
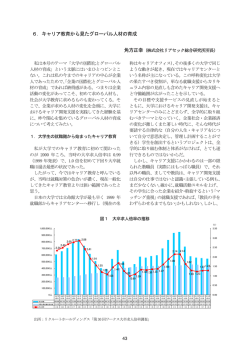
持続型筋活動を誘発する 神経刺激装置 国立大学法人電気通信大学 大学院情報理工学研究科 知能機械工学専攻 教授 横井 浩史 助教 加藤 龍 1 研究背景 長寿・高齢化社会の拡大と同時に,脳血管障害(脳卒中)や心疾患 などにより,肢体不自由や寝たきりとなることで,生きていることに対 する楽しみを大きく損なう恐れが増大してきている. このような問題に対して,脳科学研究の成果の一つである入力型 BMIを用いて,歩行運動補助や手指運動補助を行う電気刺激装置 の開発を目指す. 入力型BMIは,感覚運動野の有意な賦活を継続することを可能と し,順リクルーメント筋収縮を誘発する電気刺激装置である. 馴れにくい刺激信号,識別しやすい刺激信号を用いて,低い電圧に おいても安全性の高い歩行運動補助や手指運動補助を実現する. 2 肢体不自由者の年次推移 総数 肢体不自由 視覚障害 昭和26年 512,000人 291,000人 121,000人 義手 昭和30年 785,000人 476,000人 切断者 昭和35年 829,000人 486,000人 昭和40年 1,048,000人 610,000人 昭和45年 1,314,000人 763,000人 聴覚・ 言語障害 装飾用 202,000人 141,000人 234,000人 麻痺 250,000人 脳卒中 336,000人 不明 100,000人 179,000人 8万人 内部障害 130,000人 重複障害 (再掲) 不明 不明 筋電 不明 44,000人 能動 不明 1000人 150人 不明 215,000人 235,000人 66,000人 121,000人 脊髄損傷 317,000人 心臓病 197,000人 特定疾患医療受 給者(ALS・筋ジ 150,000人 ス) 354,000人 292,000人 185万人 458,000人 156,000人 総数56万人 121,000人 204,000人 10人 昭和55年 1,977,000人 1,127,000人 昭和62年 2,413,000人 1,460,000人 平成3年 2,722,000人 1,553,000人 353,000人 5000人/年 358,000人 総数10万人 平成8年 2,933,000人 1,657,000人 305,000人 350,000人 621,000人 179,000人 平成13年 3,245,000人 1,749,000人 301,000人 346,000人 849,000人 175,000人 平成18年 3,483,000人 1,760,000人 310,000人 343,000人 1,070,000人 310,000人 307,000人 148万人 平成18年身体障害児・者実態調査結果 国内の肢体不自由者数は180万人に上り,運動感覚 機能の補助と代替を支援する技術開発が希求の課題. 3 新技術の基となる研究成果・技術 ○機械学習機能を有する個性適応制御技術と医学的セラピーサービ スを用いた総合的ニューロリハビリテーションを行う商品開発と販路 開拓,サービス展開を目的. ○「持続型筋活動を誘発する神経刺激装置」,「個性適応型筋電義手」 4 身体運動補助の方法 このための研究方針には,主に次の3通りの異なる方法がある:機械的外力により運 動補助を行う装置,侵襲的な電気刺激,および非侵襲的な電気刺激である. 1.機械的外力により運動補助を行う装置では,ロボットの外骨格の運動機構によ り,運動機能の補助と回復を実現 2.侵襲的な電気刺激(直接的に神経刺激する方法,経皮電極を用いた電気刺激 法) 3.麻痺体を支えるために外部の装置を設置し,この装置に対してもたれかかる体 幹の重心移動をトリガーとして電気刺激により筋肉を収縮させる方法 Standing up Keeping Walking ○非侵襲的な電気刺激法 表面電極を用いた経皮的電気 刺激により,筋刺激により運動を 誘発する.実験では,手指の握 り,下肢による立位保持,歩行な どの成功例が示されている. 5 f-MRI Analysis of Adaptation Sensory motor coordination is necessary for confidential grasping. (Tactile Sensing is important.) Without Tactile Feedback Before training Motor Area After Training Activity Up Activity Up Parietal cortex With Tactile Feedback Before training After Training Still Active Adaptation vs Habituation (Effect on the Coexistence of Man and Machine) Limited Disappeared 6 計測環境 EEG計測システム 近赤外光イメー ジング装置 島津製作所 Force3000(8) ニューロインパルスアクチュエータ Spectratech OEG-16 48c日本光電 全脳の頭皮上電気活動を計測 160ch全身の 筋活動計測 超音波診断 装置 内臓・筋活動 を計測可能 個性適応情報処理を用いた 前腕部3ch筋電解析システム 40 EMG計測 システム 15 皮膚インピーダンス計測用LCRテスター その他,電動装具,電動車 椅子,NAC3Dモーション キャプチャ16ch 脳・神経・身体の活動に関する計測設備および,応用研究用の既存設備 7 持続型筋活動を誘発する神経刺激装置のブロックダイアグラム 人 体 運 動 指 令 系 脳 幻覚 イメージ 脊 髄 入力型BMI (生体活動の 誘発) 機械装置 情報処理装置 出力型BMI (外部機械 の制御) 脳適応度 最適化 筋・身体活動計測 パラメータ最適化 反射 反応 出力型BMI(刺激) 第 二 次 制 御 系 筋 直接刺激反応 四 肢 幻覚イメージ 直接筋刺激 機械装置運 動状態計測 第 一 次 制 御 系 幻覚イメージ の投影 バイオフィードバック (反射系刺激) 8 干渉FM変調法を用いた電気刺激装置 H21年度研究開発物品 重量:1100g H22年度研究開発物品:重量:500g 9 FES for Acute Hemiplegic Stroke patients Case 1, cerebral infarction, BRS Ⅲ (day 8) Day 10, before FES Walk10[m]:97.7[s] 61[step] ⇒ Day 10, after FES 48.6[s]46[step] 10 FES for Convalescent Hemiplegic stroke patients Case 2, cerebral infarction, BRS Ⅲ (day 36) Normal Rehabilitation (June 5 – 15) Velocity:5 4s/10m FES rehabilitation after 1 week Velocity: 22s/10m 11 ニューロリハビリテーションの成果 12 従来技術とその問題点 1.効果の継続性:馴れの発生,長期間の効果が得られない場合がある. 2.安全性:大きな体積の筋群を収縮させるためには,直接筋刺激につい ては,高電圧刺激が必要.これに伴い,周辺の皮膚感覚からの痛みの 発生を抑えきれない. 3.リクルーメント:外側から強制的に筋を収縮させると不自然な筋の逆リ クルーメント問題が発生する.速筋の収縮比率が多くなることから疲労 が発生しやすくなり,長時間の運動を補助できない. 4.制御性:15-50 Hzの低い振動数による不安定な痙攣を発生する場合 がある. 5.適応性:個人差への対応は,セラピストによるハンドコーディングが必 要であり,自動的な適応はできていない. 13 発明の概要 「持続型筋活動を誘発する神経刺激装置」 特願2010-231881 出願人:電気通信大学,東京大学,福井大学 発明の用途: 麻痺を有する脳神経疾患に対して,感覚運動系のバイパスを用いて 運動機能を再生,または,ニューロリハビリテーション ポイント: 1.入力型BMIを用いて感覚運動野の有意な賦活を継続することを可能 とし,順リクルーメント筋収縮を誘発する電気刺激装置. 2.馴れにくい刺激信号,識別しやすい刺激信号を探索的に獲得する. また,これを用いて,低い電圧においても安全性の高い歩行運動補 助や手指運動補助を実現する電気刺激装置. 3.この電気刺激装置を用いて,麻痺を有する脳神経疾患に対して,感 覚運動系のバイパスを用いて運動機能を再生,または,ニューロリハ ビリテーションを実現. 14 新技術の特徴・従来技術との比較 1.効果の継続性:入力型BMIを用いて,感覚運動野の有意な賦活を追跡し,脳の活動を 抑制しないような刺激信号の混合パターンを探索することにより,馴れにくい刺激信 号,識別しやすい刺激信号を探索的に獲得する.これにより,個人の特性に合わせた 信号の最適化を行う. 2.安全性:感覚フィードバックに関する求心性神経と筋組織の収縮を引き起こす遠心性 神経を刺激することにより,直接筋刺激と反射筋刺激を併用することで,刺激電圧の 低下と皮膚へのダメージの低減を図りながら十分な筋収縮を実現.また,数~20kHz の高周波信号を基準周波数として,感覚神経の反応しない帯域の刺激信号を作るこ とにより,痛みの発生を抑える.これらにより,痛みの低減と十分な筋収縮(安全性の 高い歩行運動補助や手指運動補助)を実現する. 3.リクルーメント:反射筋刺激を用いることで,筋の内側からの収縮を促し,遅筋を主体 的に活動させることにより,順リクルーメント筋収縮を誘発する刺激を探索し,逆リク ルーメント問題が発生を抑制する.これにより,長期の繰り返し筋収縮を実現. 4.制御性:FM周波数変調方式によるPWM信号を用いて,数~20kHzを基準周波数とし, その上に15-200 Hzの低い振動数を重畳することにより,擬似的に筋収縮に適した低 周波信号を作成する. 5.適応性:信号強度,基準周波数,刺激周波数を制御パラメータとし,これらの制御パラ メータを所望する運動の発生に応じて,適応的に探索するフィードバックシステムの実 現.たとえば歩行補助においては,左右の足の相互情報量を等しくすることにより,両 足の歩容をそろえるように自動調整する. 15 想定される用途と業界 • 用途 歩行運動の補助,手指運動のリハビリテーション • 利用者・対象 リハビリテーション施設,病院など スポーツ・トレーニングセンター • 市場規模 リハビリ関係施設数:1000 導入費用:60万円×10台と想定 →60億円の市場規模 16 実用化に向けた課題 • 現在,電気刺激装置をリハビリテーションに用いるこ とについては,薬事法に基づく医療機器登録を行う 必要があること. • 脳卒中者の歩行リハビリテーションへの適用可能性 については実証済みではあるが,多くの筋肉を自由 自在に制御するための,入力パネルの改良を行い, ユーザビリティーの向上が必要となること. 17 研究試作品の原価 • • • • • 製品名 市場価格 試作原価 筋電センサ 筋電義手 装飾用義手 電気刺激装置 低周波治療器 40~350万円程度(8ch) → 4万円 150万円程度 → 40万円 10万円程度 100Vクラス 200万円程度 → 10万円 60万円程度 18 企業への期待 • 組込み技術を持ち,GUIなどの入力インター フェースを開発可能な企業との連携を希望. • 薬事法の規定に基づく医療機器申請の可能 な企業との連携を希望. 19 本技術に関する知的財産権 発明の名称:持続型筋活動を誘発する神経刺激装置 出願番号:特願2010-231881 出願人 :国立大学法人電気通信大学、国立大学法人東京大学、 国立大学法人福井大学 発明者 :横井浩史,加藤龍,森下壮一郎,山村修 発明の名称:個人適応型生体信号被動器制御システムおよび制御方法 出願番号:特願2001-153110(特許第4517537号) 出願人 :国立大学法人北海道大学 発明者 :西川大亮,兪文偉,横井浩史,嘉数侑昇 発明の名称:ロボットハンド及びロボットシステム 出願番号:特願2010-119237 出願人 :国立大学法人 東京大学 発明者 :横井浩史,加藤龍,中村達弘,北佳保里 20 産学連携の経歴 • 2006年-2008年 筋電位センサを用いた疲労度計測に関 する研究,株式会社シマノと共同研究実施 • 2006年-2008年 ねじりバネ式ワイヤ駆動方式の開発,日 本電産株式会社と共同研究実施 • 2009年-2011年 高弾性生地を用いた運動補助医療の開 発と生体信号を用いた機能評価,ホリスレン社と共同研究 実施 • 2008年-2012年 BMIのための入出力系デバイス技術開 発と脳神経倫理学的検討,受託研究,文部科学省「脳科 学研究戦略推進プログラム」ブレイン・マシン・インター フェース(BMI)の開発「日本の特長を活かしたBMIの統合 的研究開発」 21 お問い合わせ先(必須) 国立大学法人電気通信大学 産学連携コーディネーター 小島珠世 TEL 042-443-5780 FAX 042-443-5108 e-mail [email protected] 22
© Copyright 2026 Paperzz