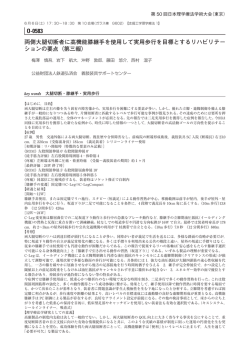
知っていると便利な知識 Ver.1.05 編集:日本大学理工学部グライダー部 2004.07.31 「準備よし~着陸まで」知っていると便利な知識 Ver1.05(ASK21,ASK13) 始めに、このノートはウインチ曳航で場周飛行を行う上で、特に離陸後に必要な確認項目 と、その内容を解説したものです、知識として頭の中にインプットして、実際の訓練に役 立てて下さい、また、書かれている高度については妻沼滑空場における高度 14000Ft 以下 での訓練を想定しています、特に QNH(平均海面上大気圧による高度規制値)は 30m で書か れていますので他の滑空場で訓練する場合は、その滑空場の QNH もしくは標高に置き換え て読んで下さい、従って対地高度〇〇m と書かれている以外の高度は全て妻沼滑空場の QNH 高度です。 「準備よし~離脱まで」の巻き まず、最初にウインチ曳航を横から見た状態を図にしました。 離脱 1,2(確実に離脱を確認しましょう) 離脱用意 (エレベーターをかなり引いても自然に機首が下がり始めます) 高度300m~400m 高度150(対地高度120m) 高度60(対地高度30m) 安全高度通過 離脱期 後期上昇 中期上昇 移行期 初期上昇 黄緑色の点の部分は声に出してチェックします 1:「準備よし」 出発前の点検事項を確認し、シートベルトを締め、キャノピーをロックして、風向、風速 を確認し、進行方向及び上空(対地対空)に障害物が無い事を確認したら「準備よし」。 2:「出発」 索が張り機体が動き始めたら「出発」、その後離陸するまで機体の水平、及び方向を維持し、 (水平はエルロンで、方向はラダーで個別に操作する)エレベーターはニュートラルで離 陸を待つ(正対風の時は無理に離陸させようとアップをとらない)。 3:「離陸」 主輪と尾輪が地上を離れた事を確認する。離陸直後は地平線を見つめると同時に、風防の 1 左右から地面が下がる様子を観察しておく。地平線の下がり方と地面の離れる速度で初期 上昇の角度を覚えるようにする。 4:「高度 60」(妻沼 QNH 高度 60m) 安全高度 60mを通過した事を高度計で確認する。 安全高度 60mとは、ウインチ曳航の初期に於いて、索切れ、ウインチのエンスト等が発生 した場合に備えて、対地高度 0m~高度 60mの範囲では過度な上昇角度を取ってはいけな い高度、特に機体は自然に急上昇しようとします。 高度 60mから 150mの移行期では大きい操作や段付き上昇させず序々に上昇角度を増しま す。 5:「高度 150」(妻沼 QNH 高度 150m) 判断高度 150mを通過した事を高度計で確認する。 判断高度 150mとは、それ以下の高度で索切れ、ウインチのエンスト等が発生した場合、 必ず直進して着陸する高度。 150mを過ぎて中期上昇に入っても少しずつ上昇角をとって行きます。 引き続きエレベーターを引いていると後期上昇の後期に入り、自然に機首が下がり始めま す、そうしたら次の離脱用意です。 6:「離脱用意」 ウインチ曳航の最終段階で、機体がウインチ上空に近づく事により上昇率が低下しますの で、引いていたエレベーターを緩めていくと機首も下がり始め、滑空姿勢近くになるとウ インチのパワーも緩めてきますので滑空姿勢になったら次の離脱です。 7:「離脱12」 滑空姿勢に入った後、ウインチからの索のテンションを感じなくなったらレリーズを引い て離脱し、更に確認の為に2回離脱操作を繰り返します、またレリーズには運用回数制限 が有るので備考1にその詳細を示します。 8:ピストから「離脱確認」のコールが有ったら、「離脱高度……m」と回答する。レリー ズを引いたり機体の開放感により離脱を体感出来るが、ピストからの「離脱確認」により 確実に機体から索が解放された事を認識し、離脱不能による回避操作をする事無く通常の 滑空が可能な事を確認します。 9:上昇偏流について 曳航中にピストから「日大21川へ」、「日大21戻されるな」、「日大21オンコース」と 指示される事が有りますが、総称して「横風による影響をうけているので修正せよ」を具 体的に指示している事です、従って機体側はその指示を実行しなければいけませんのでそ の具体的方法を解説します。 比較的弱い横風成分1~2m弱の時は、初期上昇終了の移行期からエルロンを使って風上 側にほんの少し翼を傾けエルロンを中立に戻すと同時に付けたバンクが深く成らない様に 風下側のラダーを当て、傾きを維持します(よく言われる「逆ラダーを当てる」がこの操作 です)。 少々強い横風成分2m強以上の時は、初期上昇の後期から旋回の初動操作で風上側に少し 翼を傾けると共に機首も向け風上方向に進路を取ります、エルロンを中立に戻すと同時に 付けたバンクが深く成らない様に風下側のラダーを当て、傾きと方向を維持します。 いずれの操作も風上に行く為の操作ですが、どこまで行けば良いか?、また「オンコース」 と言われて、どのくらいの傾きを保つのか?どの方向を保つのか?上空では目標物が無く 2 ピストからの指示頼みですが、最低限言えることは、離脱する時までにピストが指示する ポジションに到着すれば良いので過度な傾き及び方向変更をする必要は有りません。 10:その他、ウインチ曳航において最も必要な知識 ① ウインチ曳航速度 機種 Vw 適度な曳航速度 ASK21 150Km/h 115~120Km/h ASK13 100Km/h 95~100Km/h なお、ASK21 の場合 Vw が 150Km/h でも 130Km/h を越えた時点でほぼ確実にヒューズが切れ ます。 ② 曳航速度が適切で無い場合の処置 ASK21 の時 遅い時 (約 85~95Km/h) もっと遅い時 (約 80Km/h 以下) 早い時 (約 120~150Km/h) もっと早い時 (150Km/h を越える) 処置 上昇角度を低下させて加速し易くすると共に無線で「ウインチ遅 い、速度〇〇」を伝えて加速するのを待つ。 上記の処置を行った後も加速せず減速が続く時は、ウインチトラブ ルが予想されるので、すみやかに機首を押さえて離脱する。 自らの、過小な上昇角による曳航速度の増大を除き、無線で「ウイ ンチ早い、速度〇〇」を伝えて減速するのを待つ。 上記の処置を行った後も減速せず加速して Vw を越えてしまう事が 予想される時は、すみやかに機首を押さえて離脱する。 ③ 索切れ時の処置 まず、それが索切れであるかどうかを判断するのに迷う場合があるので参考までに、どう いう状況が予想されるかを解説します。 索切れする場所 どの様に感じるか? 機体側またはヒューズ 急に解放された感覚で「ぶっちーん、切れた」を実感します。 ウインチ側またはスリ じょじょに減速するので「ぶっちーん、切れた」と言う感覚は ーブのすっぽ抜け 全く無く、むしろ「どうしてウインチが遅くなるの?」と言う 感覚を得る。 なお、強風時、日大4連ウインチの場合、高度 400m~500m位の所でオートマチックミッ ションが2速から1速にシフトダウンする事が多く、そのショックを上記の索切れの感覚 と勘違いし易いですが、ショック後も引き続きウインチのパワーを感じます、その場合、 教官が「そろそろシフトダウンが来るはずだ、今のがシフトダウンだ!」とアドバイスし ますので、索切れとの違いを把握する為にもシフトダウンの感覚をしっかり覚えて下さい。 いずれにせよ、上記の表の感覚を得たならば索切れですので索切れ時の処置を行います、 その方法は、 1.機首を押さえて離脱 2.加速姿勢にセットして機速を安定させ(速度計示度 100km/h)、その後、高度判断。 以上の二つですが、 1の「機首を押さえて離脱」とは、索切れ直後なのでまだウインチ曳航の慣性が残ってい 3 る間に、機首を下げて加速可能な姿勢にして、次に離脱します。ついつい あわてて離脱だ け行って、機首下げを忘れ無いように!!、ウインチ曳航の慣性を利用するチャンスを失 います。 2の「加速姿勢にセットして機速を安定させ(速度計示度 100km/h)、その後、高度判断」 とは、1での「機首下げ」が足りない時と下げ過ぎが有りますが、まずは加速姿勢にセッ トして機速を安定させ(風防の風切り音が増し)速度計で機速が 100Km/h 出ている事を確認 し、直進をする高度 150m以下か、旋回可能な高度 150mを越えているかを判断する事です。 ①対地高度 5~10m位で索切れした場合 機首を押さえて離脱し、ダイブを開けずに直進し着陸と同時にダイブを開けます。 要するに高度も低く機速も十分に無い状況でダイブを開けると落着してしまうからです。 ②対地高度 10m~高度 80m位で索切れした場合 上昇角度はまだ大きくないので機首を押さえて離脱し速度の安定をはかり、速度計で 100km/h を確認し、もう一度速度の安定を確かめてから丁寧にダイブを操作して前方に着 陸します。 ③高度 150m 付近で索切れした場合 ウインチ曳航の中期上昇にさしかかる所なので上昇角度も急に成りつつあり、今まで空し か見えなかった状態から一度押さえると、少しでも地平線が見えると加速姿勢にセットさ れたかの様な感覚を覚えるが、ウインチ曳航の慣性が残っている状態である点と、十分に 機速を回復させる為に、次の段階の操作である旋回操作又はダイブ操作に入る前にもう一 度操縦桿を押さえて機速の安定を図り、尚かつ速度計で、ASK21 なら 100~110km/h,ASK13 なら 90~100km/h の機速が出ている事を確認する。 これが日大の言うところの「操縦桿を2度押さえよ」の意味です。 従って、「2度押さえ」終了後は通常場周飛行のチェックポイント通過後の姿勢と同じで、 ただポジションがチェックポイント横では無いので、直進をする高度 150m以下か、旋回 可能な 150mを越えているかを判断します、この高度判断は理由抜きに 150m以下か 151m 以上です。 高度 151~250mの場合、旋回可能ですが通常の第一旋回、第二旋回ではなく、まずUター ンしてその後、旋回を継続するか、場周幅を調整する事を勧めます、それはチェックポイ ント 200mの通常場周を行う事が不可能な為です。 まず、第一に人命優先、機体は次です、皆さんが練習する妻沼滑空場の場合ウインチを過 ぎても牧草地が有り、そこは着陸可能ですので無理な低空旋回をする事無く、慣れた直線 進入で着陸する方が安全です、そのための判断高度 150mです。 もしウインチにぶつかると感じるなら始めから軸線をウインチの横にずらしなさい。 ④ 離脱不能時の処置 少々話が長くなるので備考2にその詳細を示します。 4 「離脱後~チェックポイント通過まで」の巻き 11:「滑空姿勢セット(速度計示度 90km/h)」 すでに、離脱前に滑空姿勢に入れているものの、今一度、その滑空姿勢が対気速度 90km/h かどうか速度計で確認しずれている時は修正します。 12:「第一旋回、右(左)確認、初動、当て、停止」 右(左)に近接する物体が無いことを目視確認すると同時に翼端方向に目標を定め、あら かじめ停止方向を決めます、その後右(左)方向に旋回し、旋回中は滑空姿勢、バンク角 度と毛糸を確認しずれている時は修正します、旋回終了後は同様に滑空姿勢と毛糸を確認、 修正しながら目標に向かって直線滑空します、その際、横風が強い時は風上に機首を向け て編流角を取ると横風に流される事無く目標に向かえます。 13:「第二旋回、右(左)確認、初動、当て、停止」 第一旋回と同様に、右(左)に近接する物体が無いことを目視確認すると同時に翼端方向 に目標を定め、あらかじめ停止方向を決めます、その後右(左)方向に旋回し、旋回中は 滑空姿勢、バンク角度と毛糸を確認しずれている時は修正します。 5 14:課目実施 個々の課目実施要領は別にして、課目を行う空域と各課目のコース取りについて説明しま す、図 A の様にチェックポイントより風上で滑走路上空を避けた空域で課目を行います。 理由は、まず滑走路上空はウインチ曳航で上昇する機体の邪魔です、これは当然です。 次にチェックポイントより風下は着陸態勢に入った機体の邪魔に成るからです、少し考え て見ましょう、たまに第三旋回点付近で高度約 250m位で+0 位で粘っている機体がいます、 粘っている方は必死でしょうが場周に入った機体から言えば邪魔です、高度約 300m位な ら「がんばれ」とエールを送りますが、高度約 250m位では「降りるのか、降りねーのか、 はっきりしろ」と文句を言いたくなりますので、皆さんもお邪魔虫に成らない様にしまし ょう。 図A Final Approach Check Point Base Leg Base Leg Turning Base Check Point Right Down Wind Leg ピスト 課目実施空域 ピスト Left Down Wind Leg 課目実施空域 Turning Final 6 Turning Base 次に各課目のコース取りですが、他機の邪魔にならず自分はいっぱい課目練習を行うには 図 B,C,D,E の4つのパターンと無風もしくは背風時の図 F をお勧めします。 Check Point Base Leg ピスト Left Down Wind Leg 図C 180°旋回が主体の時 ピスト Left Down Wind Leg 図B 直線+90°旋回が主体の時 Check Point Base Leg 7 Check Point Base Leg ピスト Left Down Wind Leg 図E 風が強く、すぐピスト横に流されてしまう時 ピスト Left Down Wind Leg 図D 360°旋回が主体の時 Check Point Base Leg 8 無風、もしくは背風時は当然ながら離脱高度が低く、なおかつピスト横までは追い風にな らないので離脱高度にも依りますが、図Fの様に、離脱後のすみやかに第一旋回を開始す るか、離脱高度が特に低い場合は早い段階でとりあえずピスト横近くまで帰投する事を優 先し、図の深緑点線部分または青点線部分で高度判断します。 ピスト Left Down Wind Leg 図F Check Point Base Leg 9 ちなみに横文字が出ていますが日本語(地域により差が有ると思う)では下記の様に成りま す 横文字 Check Point Down Wind Leg Turning Base Base Leg Turning Final Final Approach 日本語 アイハン横通過、又はピスト横通過 第二旋回点から第三旋回点までの間 第三旋回 第三旋回点と第四旋回点の間 第四旋回 進入 Check Point の位置は着陸予定地点の横を意味します、通称ピスト横と言う言い方をする 時が有りますが、あくまで着陸予定地点を意味します。 いつも飛ぶ妻沼の場合、アイハンよりヒピストの方が良く見えて確認し易いので心理的にピ スト横を Check Point に置き換えてしまいがちですが、クロスカントリーに出て不時着する 時ピストは無く、自分で決めた着陸予定地点だけが有るわけですから、Check Point の位 置は着陸予定地点の横です。 10 以上課目のコース取りまで説明しましたが、高度ゼロmまで課目を行ったのでは滑走路に 帰れません、では、「いつ課目を終了するか?」と言う疑問が出ます。 その回答は直接的に「いつ、どこで課目を止める」と言うのでは無く、先の図 A に示した Check point と言う、空中に浮かぶゲートの様な空間を通過可能かどうかを判断し、これ 以上課目を続けたら通過出来なく成ると判断した時ではもう遅く、これなら通過可能と判 断したところが課目を止める時と場所です。 では、その Check point とは具体的にどんな空間でしょう、図Gに示します。 0m 約 23 0m 度 高 ± 10 約 90 0m 高 度 20 0m 約 90 0m 図G 着陸地点 約 90 0m 着陸地点 さて、Check point を通過するには、皆さんが学校に行く時「あと〇〇分位で正門を通過 出来るな!」と予測するのと同じ予測能力が必要です、皆さんは自分の歩くスピードを基 にして自然に予測していると思いますが、グライダーではどうでしょう? その予測に役立つ知識を備考3に示します。 11 「チェックポイント通過~着陸まで」の巻き 15:「チェックポイント通過」 課目実施後チェックポイントを通過する前に無線で「日大〇〇、場周に入ります」をピス トに伝え、以後、着陸の為の場周飛行以外行わない事を宣言します。 1.チェックポイント通過後、通過高度を読み上げ、機首をピッチダウンして加速姿勢 (速度計指針 100km/h)にします、理由は、チェックポイント通過後対地高度が低 くなるので失速速度から十分増速させる為と、増速する事により操縦性を良くする 為です。 2.ピストから着陸に必要な情報又は指示が伝えられたら、必ず無線で復唱する。 16:チェックポイントと第三旋回の間では「加速姿勢チェック、毛糸チェック、アイハ ン確認」 第一旋回と第二旋回間と同様ですが、プラスしてアイハンの位置を確認し、現在高度、ポ ジション、風の状態を考慮して、いつ第三旋回をすべきかを判断します、この判断がその 後の良否を左右する重要なポイントで「パス角」判断と呼びますが、アイハンの見える角 度の事です。 17:「第三旋回、右(左)確認、初動、当て、停止」 第二旋回と同様に、右(左)に近接する物体が無いことを目視確認すると同時に翼端方向 に目標を定め、あらかじめ停止方向を決めます、その後右(左)方向に旋回し、旋回中は 通常旋回と同様、姿勢、バンク角度、毛糸を確認しずれている時は修正します、特に対地 高度が低く、ストール、スピンからの回復に必要な十分な高度が無い為、機首が大きく上 ったり(速度抜け)、旋回方向のラダーを踏みすぎたり、バンク角度が足りなかったりして 毛糸が旋回方向に流れる外滑りに成らない様に、また急旋回に成らない様に旋回します。 18:第三旋回と第四旋回の間では他の場周機(特に同時に進入する機体)の有無を確認 した上で、「姿勢チェック、毛糸チェック、アイハン確認」 チェックポイントと第三旋回間と同様ですが、プラスしてアイハンの位置を確認し風の状 態を考慮して、いつ第四旋回をすべきかを判断します。 19:「第四旋回、右(左)確認、初動、当て、停止」 第三旋回と同様ですが旋回終了後はウインチとアイハンを結ぶ軸線に機体を乗せる必要が 有る為アイハンの位置を確認します、しかし軸線を気にしすぎると姿勢管理と毛糸管理が おろそかになるので具体的には、機首位置をしっかり見て姿勢チェックと共に速度計指示 も確認(100km/h)、毛糸チェック、そして60°ほど旋回すると自然と軸線が視界に入って 来るので、それまで速度管理と毛糸管理を重点的に行います。 20: 「進入」、ダイブブレーキのロックを解除して「加速姿勢、アイハン、軸線、地平線」 第四旋回終了後から着陸までが全フライトの中でも短時間でかつ、やらなければならない 事が多く最も忙しい区間です。 12 1.第四旋回の最終から軸線を意識して旋回終了時に軸線に乗る様にする。 2.軸線がずれない様に維持又は細かく修正し「姿勢チェック」で姿勢を確認した上で 速度計の指示も確認し、「アイハン」で着陸地点を確認し、「軸線」でアイハンとウ インチを結ぶ軸線に対してずれが無いかどうかを確認する。 3.上記の「アイハン」で確認した着陸地点が近づく様ならダイブブレーキを開けて降 下率を増してアイハンに接地する様にダイブブレーキを調整します。が、ダイブの 効き目は約 3 秒後に現れるのでちょこちょこ開け閉めしても効き目は分かりません、 前述の「ダイブの効き目」とは物理的な空気抵抗板の効果が遅れると言う意味では 無く、ダイブを開けた直後は微分的には大きな変化をしていても操縦者が沈下の様 子を把握するには積分的に時間が必要と言う意味です。 4.また、進入中の加速姿勢を一定にしてダイブを開けると空気抵抗板の効果により対 気速度は減少するので速度計の指示も遅れて減少します、また、ASK21 はダイブを 開けても自然に機首を上げようとしませんが ASK13 は自然に機首を上げようとする 性質と先ほどの空気抵抗板による速度減少が重なって対気速度減少が大きく現れる ので意識的に ASK21 の場合より機首を少し下げて対気速度の維持を行いましょう、 と文章だけで説明を終わると何がなんだか分からないと思うので進入とダイブにつ いて解説します。 [進入とダイブ 1] 第四旋回を終わり軸線に乗ったらダイブロックをはずす、ダイブはすぐに開かず(はじめ から高すぎる場合は別)軸線が少々ずれていてもダイブを開けずに軸線上を進入してくる とアイハン(手前側)が計器板から隠れ始める、それからダイブを開き始めればよい。 手前のアイハンが隠れ始める Good パス 進入角度 ただしダイブブレーキは空気抵抗板なので、開けると沈下が増して沈み度合いが深く成っ てくる、ここでダイブを開き始めると吸い出されて全開までいってしまう(前席は後席が 13 開けていると思い込みがちだが、これが“ダイブの吸い出し”と呼ばれる現象です)。 操縦者にとってダイブ操作のコツは「1/4 開~1/3 開の位置で進入角度の様子を見る事が大 切である」 またダイブは 1/4 開~1/3 開で開けてから3秒位待つとさらに沈下が大きくなる、これが 本来の沈下である、従ってよく陥りやすいパターンは ①ダイブの吸い出しに気づかず、連続してダイブを開けてしまい、沈下の様子を見ない。 ②その結果、進入角度(沈み度合い)が深く成りアイハンが遠くに行ってしまい、ショート する。 ③その結果、ダイブを全閉にしてアイハン近くまで進入しなければならない。 ④その結果、ノーダイブで引き起こしを行い接地が難しくなる、もしくは引き起こし操作 中にダイブ操作も行わなければ成らなくなり接地が難しくなる。 以上が陥り易いパターンですが、ダイブを 1/4 開~1/3 開の位置で着陸しなさいと言って いるのでは有りません、風の強さによっても違いますが、0m/s~3m/s の範囲なら全開また は 3/4 開、3m/s~7m/s なら 3/4 開まで、7m/s~10m/s 以上なら 1/2 開位までが適切な沈下 率を得られ引き起こし操作による上昇を防げます、ノーダイブでの引き起こし操作は経験 者でも非常に難しいです。 [進入とダイブ 2] 吸い出し現象と様子を見るが実感できる様に成ったら、Aiming Point について説明します、 Aiming Point とは沈下の様子を見終えてからダイブの開きを一定にした後、アイハンが見 える位置、つまりアイハンを狙う位置です。 ASK21 の場合 約2cm (約指1本分) 進入角度 14 ASK13 の場合 約7~8cm (約握りこぶし1個分) 進入角度 図に示した様に機体によって Aiming Point の見え方は違います。 21:着陸の為の最終引き起こし 進入の最終段階に入って、対地高度が約 10m程に成ったら計器や直前の地面ではなく、よ り遠くのウインチを見る様に「地平線」、「地平線」を繰り返し、左右の地面が自然に視界 に入る様にして、左右の地面が近づいてきたら地平線を見ながら徐々にピッチアップ を 開始します、このピッチアップ開始タイミングを把握するのがとても難しく、これこそト ライアンドエラーですが、南風発行時の土手の中段に腰掛けてアルファーランウエーを見 下ろした時の見え方が、遅くともここから引き起こさなければならないタイミングです、 次にどのくらい引き起こすか?の回答は「主輪と尾輪が同時に地面に接地する位置まで、 もしくは、少し先に尾輪が接地する位置まで」で、どのくらいのレートで?の回答は「高 度 0.5m~0mで引き起こしが終了するレート」ですが、機械的では無く、あくまでも機体 の降下具合と地面の接近具合を確認しながらスムーズに行います、また機体の降下率が増 大し落着しそうな時はダイブを少し閉めて降下率を低下させ落着を防止します。 地上の突風が強い時は、尾輪が接地するまで起こさず、主輪が地面に接する様に接線接地 を行います、目的は突風に素早く対応する為です。 22:着陸、地上滑走、水平維持 着陸後、ブレーキをかけて機体が停止するまでエレベーターを引き尾輪を地面に接地させ、 傾き、方向の修正をエルロン、ラダー、それぞれ単独で行い(旋回操作では無い)、水平を 保ち機体停止後も水平を維持する様にエルロンを操作する、特に強風時は機体停止後の水 平維持(地上安定)は重要です、なお機体が停止するまでエレベーターを引いて尾輪を地面 に接地させるのは、横風による風見効果の影響を低下させる目的です。 15 23:何らかの事情により(巨大な沈下等)前述の Check Point を通過出来ない時、または、 何らかの事情により第三旋回が低く成った時、または第四が低く成った時。 前述のパターン地図の様に几帳面に四角く飛ぶ必要は無く。 ①Check Point が低く成った時は場周幅を狭くして早めに第三旋回をまわってアイハンに とらわれず滑走路内に着陸する。 ピスト 通常の場周パターン ②第三が低く成った場合の中で、安全に滑走路に帰れるが少し低いと判断された時は青線 の様に第四旋回地点を滑走路側に寄せる。 第四旋回地点に向かったら確実に滑走路に帰れないと判断される時は赤線の様に滑走路に 斜めでも良いので着陸しても OK なので第四旋回点に向かわず滑走路に向かって最短コー スをとる、もしくは滑走路手前の牧草地に着陸する。 ピスト 通常の場周パターン 16 ③第四が低くなり滑走路に届かない時は無理せず牧草地に着陸する。 ピスト 通常の場周パターン いずれも第三者に被害を与える事無く安全に着陸する事が大切です。 24:標準高度で Check Point 通過後、上昇風により上昇して第三が高くなってしまった 時 緑線の様に第三旋回位置を少し延ばすが、プラスが有ったと言う事はその後マイナスも予 想されるので第三旋回位置は延ばしても MAX100m、又は青線の様に第四旋回地点を遠くに 延ばすか又は黄色線の様に Base Leg でダイブを開き高度を落とす、その場合第四旋回開始 前で高度 130m まで落とせばいいので、第三旋回直後に 130m まで急に落とすのではありま せん、理由は、ダイブで落とした直後にど沈下に遭遇する事がよくあるからです。 ピスト 通常の場周パターン 17 備考1:レリーズの運用回数制限 レリーズの運用回数制限ですが、April.19.2001 、レリーズを製造している TOST GmbH か ら「Change of TBO」と言う Technical Notice が出されました(TBO は Time Between Overhaul の略)、なお原文は以下のように書かれています。 TBO is changed as follows: Maximum TBO between 2 general overhauls = (that means 10,000 releases/actuations) =2000 launches 内容は「分解点検の間隔を最大で 2,000 launches(release 動作 10,000 回)に変更します。」 要するに、1 飛行で 5 回動作すると 2,000 発で 10,000 回動作になりますが、現実には装着 で 1 回、 「離脱 1,2」で 3 回、合計 4 回となり 2,000 発で 8,000 回動作し 2,000 回動作分が 余りますが、それは朝の点検、その他の点検等で使用し、2,000 発でオーバーホールしな さい。と言う意味も含んだ「離脱 1,2」です。 詳細はhttp://www.tost.com/evers/edefault.htmをご覧下さい。 18 備考2:離脱不能時の処置 これは、教科書には載っておらず、ましてや想定した疑似訓練も不可能なので、今までの 言い伝えや経験者の経験談を書きます。 まず、第一に疑似訓練不能な点ですが、なぜでしょう? 通常皆さんが飛行する前に前席 重量、後席重量から機体の重心位置を確認し許容範囲内を確認後飛行するはずですが離脱 不能の時はその前後席重量に曳航索重量がプラスされます、つまり前方限界を超えた状態 に成る訳です。 では、許容範囲内の前方限界で飛行するとどうなるでしょう? まず全体的に感じるのは 非常に機体が重く感じられ、当然ながらトリムを Full Up にしても操縦桿が重く成ります、 エルロン、ラダーは効きますが Up をとっても機首が上がりにくくなりますが、機速がどん どん増加すると言う訳ではありません(前方限界の程度によると思いますが)。 以上の事をふまえて、実際に曳航索重量はどれくらいプラスするのでしょうか? 詳しく測定した訳では有りませんが、曳航索は約 90Kg/km、仮に、離脱高度約 500mでウイ ンチから約 60°で索のたるみ約 50mとして索長約 630mで重量約 57Kg、つまり離脱しよう としたら、もう一人搭乗者が突然コックピットのレリーズ上に現れた状態です。 さて、ここからが今までの言い伝えや経験談に成りますが、まず言い伝えでは「離脱不能 の時は滑走路上空で旋回し高度を低下させて風に正対して進入もしくは逆進入、進入速度 は通常より増速しその間何回も離脱を試みろ!」と聞いていますが、経験者の日大高橋教 官(監督と同期)の経験談は、うる覚えですが「ウインチ上でダイブを開き降下旋回して 少し増速して逆進入したが、進入中索を引きずる抵抗が増すと機首を下げられ早く地上に 降りたいと願いながら着陸したが、ウインチマンが良く切ってくれて助かった」とおっし ゃっておりました、ちなみにその時の風は 2〜3m/s の正対風だったそうです。 やはり曳航索重量を軽減し、可能な限り、越えてしまった重心位置を前方限界に近づけて 着陸まで導く! ウインチマンがカッターを持って走り、索を細切れにして行く行為が重 要です。 しかし、ウインチマンもこれ以上深追い出来ないと判断したら諦めましょう、よく考えて みると、機体側は最初と進入着陸はつらいですが、序々に高度が下がればその分、つり下 げている索重量は軽減していきます、ウインチマンは機体が進入を開始したら追うことは 不可能です、それ以後機体は索を引きずりながら進入着陸するしかありません。 仮に機体が高度 100mから進入開始して、機体から約 150mまで切断出来たとして、残り索 重量は約 13.5kg です、だいぶ重量軽減できました。しかし地上を引きずる動的重量が最後 の難関に成るようです、これも経験談ですが昔、工学院大の高柳教官が離脱不能の時地上 付近まで進入した時、引きずった索が水溜まりに入り地上を引きずる索の抵抗が増し、機 体が落とされたと聞いた事があります、以上をまとめてみると。 1.離脱不能な時は場周パターンを描く事は考えず、滑走路上に索を落とす為に滑走 滑走路上空で降下旋回しその後逆進入あるいは強風で流される時は正対進入。 妻沼の場合、川側には絶対に 流されない様に!、滑走路上でなんとかするように! 1.降下旋回最低高度は具体的に何mと決まってないが 100mまでが限界だと思う 2.ダイブを操作するまで何回も離脱を試みる 3.進入では索が地面を擦る抵抗を考慮し通常の加速姿勢(100km/h)より増速し、VA より少し下の 130~150km/h 程度でこすりつける様に着陸する。 19 備考3:損失高度予測 直線飛行しているならば、今持ち合わせる知識で計算可能です、例えば Check point まで あと 500mで対気速度 90Km/h、上空は無風で沈下率 0.8m/s とします。 対気速度 90Km/h は秒速にすると 25m/s 従って 500m飛ぶのに 20sec 必要 ∴損失高度=20sec×0.8m/s (沈下率) =16m 同様に追い風 5m/s の時は 対地速度=25m/s(大気速度)+5m/s(追い風) =30m/s 従って 500m飛ぶのに 16.7sec 必要 ∴損失高度=16.7sec×0.8m/s (沈下率) ≒13.4m では、旋回すると1旋回で何m損失するのでしょうか? 求める為には1旋回に要する距 離が必要です、実は下記の公式を利用します。 R= U 2 g × tanθ R=旋回半径(m) U=対気速度(m/s) G=重力加速度(m/s^2) θ=バンク角(deg) 対気速度 90km/h、バンク角 15°で上空は無風、沈下率 0.8m/の時は上記公式から R=(25×25)÷(9.8×tan 15°) =238m 従って、1旋回の円周=238×2×π =1495m ∴損失高度=(1495m÷25m/s)×0.8m/s (沈下率) =47.84sec ≒50m 以上計算で求めましたが、沈下率などは時々刻々変化しますのでいちいち計算していては 課目練習に身が入りません、そこで次ページの様な表をあらかじめ作って丸暗記しておき ます、 時々刻々変化する沈下率はアバウトで平均的にみて損失予想高度を選択します。 20 直線飛行時の損失高度 対気速度(Km/h) 90 Tail Wind(m/s) Head Wind 飛行距離(m) 1000 10 5 0 5 10 0.5 14.3 16.7 20.0 25.0 33.3 1.0 28.6 33.3 40.0 50.0 66.7 沈下率(m/s) 1.5 42.9 50.0 60.0 75.0 100.0 2.0 57.1 66.7 80.0 100.0 133.3 旋回時の損失高度(m) バンク角(DEG) 対気速度(Km/h) 90 15 30 45 0.5 29.9 13.9 8.0 1.0 59.8 27.7 16.0 沈下率(m/s) 1.5 89.7 41.6 24.0 2.0 119.6 55.5 32.0 2004.07.31 日本大学理工学部グライダー部 21
© Copyright 2026 Paperzz