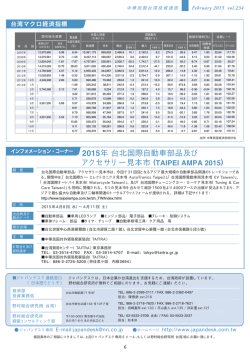
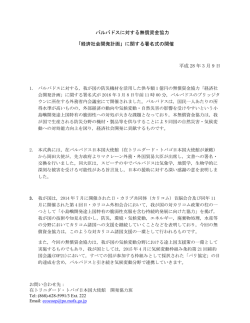
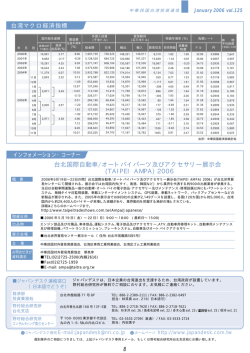
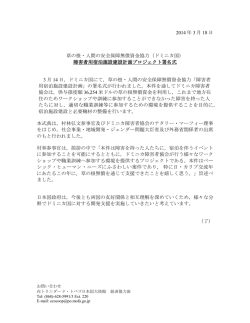
PLC-BASED CONTROL SYSTEM FOR THE KEK DIGITAL ACCELERATOR Eiichi Kadokura1, Accelerator Laboratory, High Energy Accelerator Research Organization 1-1 Oho, Tsukuba, Ibaraki, 305-0801 Abstract The KEK digital accelerator (KEK-DA), which is a small scale induction synchrotron and the renovation of the former KEK 500MeV booster synchrotron, is under beam commissioning since July 22nd, 2011. For the control of all equipment’s in the KEK-DA, the PLC (Programmable Logic Controller) made in a single company has been employed. This enables us to easily develop the operation software and quickly deal with changes in the operation mode. There have been no troubles caused by the control system since its start. We can say the present control system is highly reliable. PLCによるKEKデジタル加速器制御システム 1. 概要 シンクロトロンに於ける誘導加速(デジタル加速) 方式を実証する為にKEK-PS-ブースター陽子シンク ロトロン(500MeV)を改装して2011年7月22日からテ スト運転を行っている。この加速器の全ての機器の 制御システムをひとつの会社で製作されている PLC(Programmable Logic Controller)に限定する事によ りソフトウェア開発が簡便になり、加速器の運転 モード変更に迅速な対応が出来るようになった。運 転開始以来、制御システムに起因する故障は皆無で あり、非常に高い信頼度を得ている。 イオンビームを発生し、LEBTラインを通しDAリン グに入射する。入射されたビームは誘導加速セルに より12MeVまで加速し、取り出しラインに出射する。 現在はDAリングでのDC磁場での誘導加速セルによ るビーム閉じ込め、DC+AC磁場での加速実験を 行っている。 デジタル加速器の特徴は低エネルギービームを線 形加速器なしに高エネルギービームまで加速できる ことである。 3. 制御システム構成 誘導加速セル ECR イオン源 2. デジタル加速器 LEBT & DA イオン源 PS ECR PLC LEBT PLC 各パルス電源室 DC Tr Tr DA PLC PS Optical FA Bus2 Safety PLC Timing PLC TP CPU Optical FA Bus2 CPU CPU Optical FA Bus2 FA-LINK CPU TP CPU PC PC Control Network 図2: 制御システム ハードウェア構成 図1: デジタル加速器の構成 デジタル加速器はECR イオン源で200KeVの陽子 1 図2に制御システム ハードウェア構成を示す。安 全とビーム スイッチ(Safety)、タイミング(Timing)、 ECR イ オ ン 源 、 LEBT 、誘導加速 (DA) と入射出射 (Inj/Ext Pulse)には、PLC親機(CPU)を置き、制御する。 PLCの構成はPLC親機(CPU)と各制御機器と接続する PLC子機(IO)とから成る。親機と子機はOptical FA Bus2(10Mbps)で接続して絶縁を図る。各PLC親機間 はFA-Link(250Kbps)で接続してデータを共有する。 すべてのPLCはタッチパネル(TP 15inch)と信号通信 を行う。 E-mail: [email protected] - 667 - 図3: 運転操作とソフトウェア開発環境 図3に運転操作とソフトウェア開発環境を示す。 運転操作は基本的にTPからすべて行う。TPからの PLCの操作対応時間は最大で100msec以下にする。 ノートPCにはTPのViewerソフトを動作させ、TP画 面を出し、TPと非同期で同じ操作を行う。ノート PCは各場所に配置してあり、無線LAN接続すること で室内を自由に移動できる。ソフトウェア開発は居 室にTPとノートPCを置き、開発ソフトの動作確認 を行ってCCRのTP、現場のPLCにダウンロードする。 転を停止する。図4にBeam SWとMain TPを示す。運 転するには画面中部ボタンのSystem Key (Permission Button:4桁数字入力)をONにする。次に上部ボタン のイオン源(Ion Source)、Dump、Extractionモードの1 つを選択し、Beam SWボタンをONする。TP下部ボ タンで各機器の操作TPに移る。 図5にBeam SWのシーケンスを示す。イオン源 モードのBeam ONは前のKEK陽子加速器のすべて非 常停止SWと放射線モニタが条件になる。Dump、 Extractionモードではイオン源モードに加えて加速室 に通じるすべてのドアと、パーソナル キーが条件 になる。非常停止SWとドアの位置及び、状態は図4 画面中部のDoor、Emergencyボタンを押すことで確 認できる。図6にドア、パーソナル キー、回転灯表 示TPを示す。図7に非常停止SW 表示TPを示す。 Beam ON/OFF は Ion Source Trigger 、 F-Cup 、 Gate Valveによってコントロールする。イオン源高圧電源 はイオンのコンディションを保つためにシーケンス に加えない。これらはすべてSafety PLCが行う。 4. 安全とビーム・スイッチ 図6: ドア、パーソナルキー、回転灯表示TP 図4: Beam SWとMain TP 図7: 非常停止SW 表示TP RESET Door Limit SW AND パーソナルキー 非常停止SW BEAM SW 放射線量モニタ 30 sec OR Ion SourceTrigger AND BEAM SW SYSTEM KEY ( Permission Button ) Close F-CUP イオン源単独モ ード 回転灯 Close Gate-Valve1 AND IS mode NOT Dump モード BEAM SW AND Close Gate-Valve2 OR Dump mode NOT 30 sec Extraction モード BEAM SW Open Gate-Valve1 OPEN LimitSW AND Extraction mode 図5: Beam SWのシーケンス 加速器運転のBeam ON/OFFはTPで操作する。緊急 時はコントロール室内の非常停止ボタンを押して運 図8: Beam ON/OFFと安全系履歴表示TP 図8にBeam ON/OFFと安全系履歴表示TPとWeb表 示を示す。Beam ON/OFFと安全系履歴は項目とその - 668 - 発生時間と復旧時間が履歴として保存される。また、 各運転モードのBeam ONの時間積算も記録する。 5. タイミング システム 図11: モード プログラマーTP 図 9: DA Ring 磁場と Timing Delay 値設定 TP タイミング システムは DA Ring 磁場 10Hz を基本 とする。1 周期 100msec 間に各機器にタイミング信 図11にモード プログラマーTPを示す。モード プ ログラマーTPで100msec Gate毎に各タイミング信号 のON/OFFをする。各タイミング信号はタイミング の ス タ ー ト か ら PLC Delay Module(20MHz 24bits Counter)で遅延させて作る。Delay用ClockはDA Ring の10Hzを定倍した約10 MHz Clockを使用する。 号を送る。DA Ring 磁場波形の立ち下がり中に、AC PG100MHz 成分が 0 になった時をタイミングのスタートとする。 C PLC Output 40bits 主なタイミング信号は、デジタル加速前(Inj Master) S C Revolution Clock に Ion source Trigger 、Chopper 、Inj Kicker、デジタ S ル加速後(Ext Master)、Ext Septum、Ext Bump、Ext 8bits Counter O C D 8bits S C Ext Bump Trigger S Kicker がある。図 9 DA Ring 磁場と Timing Delay 値 R SET CLR Q S 8bits Counter O Ext Kicker 1 D 8bits 8bits Counter O Ext Kicker 2 D 8bits 8bits Counter O Ext Kicker 3 D 8bits Q C 設定 TP を示す。 S 8bits Counter O Ext Kicker 4 D 8bits Ext Bump DA Ring Clock 1Hz Gate 1/10 G CL Pulse Ext Kicker Charge Trigger Counter 32 Bit Ext Kicker Charge 3msec J1 Ext Kicker Charge Ext Bump ADC 16 Bit VFC 1/10 1/10 1/10 Latch 1/10 Ext Kicker 1KHz 10usec 10KHz 13 Bit 100KHz Data 図12: デジタル加速取り出しタイミング 1MHz 10MHz ASIC Decoder ROM FPGA 図10: タイミング・クロック発生器 図10にタイミング クロック発生器を示す。DA Ring磁場からの10HzのClockを1/10にして1Hz Gateを 作る。このGateの間107countsになるようVFCをコン トロールする。これにより、常にDA Ring磁場に同 期した10MHz clockを作る。 デジタル加速器からの取り出し用Ext Bump、Ext Kicker信号は周回周波数(取り出し時:2MHz)と同期 をとる。Ext Kicker信号はExt Bump信号から周回周 波数を使い 10usec遅らせて、そのあと4台あるExt Kicker の 1 台 毎 に NIM Delay Module(100MHz 24bits Counter)で遅延させて入れる。各Ext Kickerの充電は 4msce前から行う。図12にデジタル加速取り出しタ イミングを示す。モード プログラマーは最大 19.8sec(9 * 22)間のパターン制御が可能である。す べてTiming PLCが行う。 - 669 - 6. 電源制御システム Matrix M Fan Alarm M Fan Alarm Trigger 12 M Temp RESET Modulator 9 Enable Trigger OK M Temp RESET (always) Enable Enable Power Power CAV TEMP50 DCHV Cell 7 9 CAV TEMP70 OK CAV OIL Match R Water1 Match R Water2 図16: DA加速電源インターロック結線構成 図13: イオン源操作とTrend表示TP DA加 速 電 源 は DC 充 電 器 7 台、 Modulator 9 台、 Trigger機器3台(1台:4 Trigger)、加速セル9台で構 成される。これらの装置のインターロックと電源を PLC IOに個別接続して制御する。運転条件により機 器の組み合わせを変える。それに伴ってインター ロック結線をTPで選択する。図15にDA加速電源操 作TP、図16にDA加速電源インターロック結線構成 を示す。 7. データベース 図 14: LEBT 操作、Recipe と Data Logger 流しインフォメーション TP Data Trend Alarm Log Data Base デジタル加速器のECRイオン源、LEBT、DA加速 とInj/Ext Pulse電源の制御を行っている。各パート電 源にTP画面を作り、電源の電圧、電流のTrend(1sec step)表示も行う。TrendデータはTP内のUSBメモリ にCSVファイルで保存する。電源の設定値は5つ Recipeファイルを用意し、Save/Loadできる。電源が 落ちた時はTP下に流しインフォメーションを出す。 また、Interlock、ON/OFF Statusの履歴表示も行って いる。 CSV File OPC Server Ethernet Server PLC 図17: データベース構成 図15: DA加速電源操作TP 図18: OPC Server とData Loggerソフト - 670 - データベースはOPC ServerによりPLCからEthernet を通して設定値、Trend Data、Alarm LogをData Base Serverに保存する。図17にデータベース構成を示す。 また、図18にOPC Server とData Loggerソフトを示 す。Data Loggerソフトによりイオン源データのCSV ファイルとTrendグラフを表示している。 8. おわりに 運転開始以来、制御系の故障もなく安定的に動作 している。次期ステップとしてExtractionラインの電 源制御、安全システム拡張が必要である。また、 Beam Monitor信号が制御系に繋がっておらず、早急 に行いたい。それに伴いデジタル加速器情報Web Pageの製作も必要である。 参考文献 [1] E.Kadokura, S.Noguchi, “Beam Operation and Safety System for the Proton LINAC of the JAERI/KEK Joint Project” Submitted to the Second Asian Particle Accelerator Conference, APAC’01, Media Center, Beijing, China Sept. 17-21, 2001 [2] E.Kadokura, J.Kishiro and T.Ishida “The Timing Control System for KEK Proton Synchrotron using PLC” The 3nd International Workshop on Personal Computers and Particle Accelerator Controls, PCaPAC2000, DESY, Hamburg, Germany Oct. 9-12, 2000 [3] E.Kadokura, T.kawakubo and M.Saotome “KEK-PS Operation Record and its Statistical Calculation by Computer” The 2nd International Workshop on Personal Computers and Particle Accelerator Controls, PCaPAC’99, KEK, Tsukuba, Japan Jan. 12-15, 1999. [4] E.Kadokura, et al., “The improvement of the KEK PS control system” International Workshop on Controls for Small-and Medium-Scale Accelerators (IWCSMSA96) KEK, Tsukuba, Japan Nov. 11-15, 1996 - 671 -
© Copyright 2026 Paperzz