高齢者・障害者の自立及び社会活動参加を支援する移動装置の開発
一不整地走行可能な省エネルギー型電動車いすの開発一
機械金属部機械研究室
副島辰夫
デザイン部
辛川洋介,佐藤彰
応用電子部
大坪昭文
副所長
持永晋一郎
高齢者や下肢障害者が通常生活圏を越えて,より広い環境で社会活動に参加したり,余暇
のレジャー活動範囲を広げるための移動を可能とする,省エネルギー型電動車いすの開発を
行う.今年度は,上記目的を達するのに必要とされる機能を組み込んだ電動車いすの1/]
試作モデルを製作し,屋内外での走行実.験を行った.機能としては,太陽光発電システムと
ソケル水素電池を用いた駆重力源,それぞれの車輪にダイレクトドライブのインナーモー
ターを組み込んだ4輪,駆動機構,ハンドル操作量を口ータリーエンコーダで検出し,操作量
に応じ車輪回転数を変化させる走行制御,2台の油圧シリンダーにより前輪,後輪をそれぞ
れ持ち上げて段差を乗り越える段差乗り越え機構,3軸のモータを利用しドライバーの姿勢
を水平に保つ安定化機構,及び超音波センサを用い危険な段差等を予知し次の操作を行う危
険予知システム等を備えている
1.はじめに
昨年度開発した各要素モジュールについて,実用
化(実機搭載)を前提にした機能評価及びそれらを
^
2輪一 4輪、前輪一後輪(手動釖替え)
組合わせた1/1試作モデルの設計・製作を行っ
T豈ミ
700×1200 (本体)
た.基本仕様及び各要素モジュールの開発について
報告する
^
約2mkg
捌宅茂忙
ハンドノ峰雜(ロータリエンコータ)
賤盲奎
Φ434
佑1拠ブ云北
ン,・ン光卿
20ok8である.全ての制御は,シーケンサで行ってい
モータ
ダイレクトドライブブ五嗣、イールイン圧一夕X4
るが,最終実機では 1チップマイコンで行う予定.パ
ノくツ丁リー
ニッケル水素(^:2.僻四ノ,、24V67A11)
ラメータ設定等は,タッチパネルで行う.このことで
サスゞノンヨ),
ヲfースブノング
屋外等での実,験走行時に,車いす単体での設定変更
段差の乗り越え
"柾シリンダによる車住持ち上け屶式
^ヒ
^1センサ十託ータ
^
^皮ビガ
2.全体構成
試作モデルの全体寸法と重量は(700×120omm)約
を可能にしている.車輪は,スクーター用のφ434mm
を使用している.太陽光利用については本体上部に
ソーラーパネルを設置し,バッテリーへの直接充電
を可能にしている
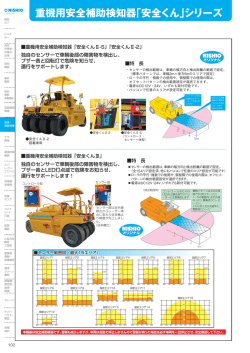
図1
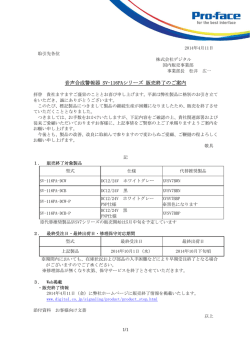
製作した試作モデルの基本仕様を図1,全体概要
を図2 に示す
-113-
試作モデルの基本仕様
X5
ヰ
'
ノ、ツテリー
0駆動パターン、車輪回転速度
(重量:2.9kg /' 24V6.7Ah)× 5
'昇轟餉
ニッケル水素
.ヲ
YN
ゞ三1ーー
ノー"\ー
^゛
ノ璽,'、
'
茨
.^1
弍、メ、
ニ、
一一
.こ゛別,.゛
ノξJ j 、'ゞ4
↓
雫
チ 子,ノ
黒
」.赴江
、/t'、':\
書髭
隱蛋暴
^
゛
田、^
,舮
.
ー=i
^
t,紗'、ヘξゞ, j ゞ'、ーー,ー?,' J 、
,、、
ざ^'1工1
5"'
、軸与電写一一誕'
'」
ノ4
一甚
ーー'
^'贄罍
_ー,_キノ
゛
゛,金
,'ゞ,y
亀9
j
fゞ
J
゛
゛1よ
.
1
オ
或鶏
'
亀
^
一1
所fン
ロータリエンコーダ
Φ 434
J.
風、電さ厶f
f
J1吻・岐修、"
、、 j' 1ト
^
/J.゛、キ'1{.ーノ^J
上、1
^
尾,yヘ
X
愈
竜.
・1*,f
注
車輪
一ン
トゼぞ,イ
斈ヨ
.^
器1
上ゞ゛ゾー,
"1 X
ノ1
、、漢
蓋
,一ゞq注
,徽
凄縫
^
'"、
1滅
雪
゛,品
"一
0左右前方向凹凸
4、、
焚一、
姿勢安定化機構
0シート前後移動 (1 モータ)
0シート傾斜前後 (1 モータ)
0シート傾斜左右 (1モータ)
等の変更・調整
危険予知システム
0正面障害物
之
1 兪"
旦゛岩1
タッチパネル(8面切替)
0基本走行(速度等)、段差乗
り越え操作
-
、t
1X
る
ぎ'、/
Y3゛、')'ニ、,,,゛,゛
ι」、乢円、
JJ?〒,ノ」.^
^'^」
'い
j
t
゛
ーー、、 1ノ」、、,4,. 1 工"、,タ',ーオ誠跡・、1堤.゛ 1
セ﹃、¥
剖七 y゛.人1ー:公 1、漣.兵,之y ノルノ
ーーー',晝
、,'{.,.!_ーセ当,゛゛此..1
^^
ー'气
〒^、.}
y
'^^,'
ー',A
ニ"凸"ーご t、ユ,'
、ー^^
按ξ
・ぎ
キ,
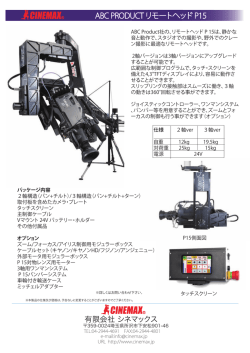
ダイレクトドライブ方式
,.、"ー
ホイールインモータX4
4彩
1'ミ
'
.゛
モータ仕様
定格出力:120W
舮
'
.^、
ξ
?
.卜
な
ラバースプリング (前後輪)
」,
.
^
定格トルク:19.1 N ・ m (195Kgf・ cm)
瞬問最大トルク:76.4 N ・ m (780Kgf・ cm)
段差乗り越え機構
油圧シリンダーX2
定格回転数:60r.P.m
最大回転数:80rp.m
※前輪持ち上げ時
図2
試作モデルの全体概要
-114-
3.要素モジュール
た家庭用電源からの充電も可能とした.本システム
方式を採用した.段差等の乗り越え機構としては,油
圧シリンダーにより前輪後輪を交互に持ち上げる車
体持ち上げ方式を採用した.操舵はハンドルで行い,
ハンドル操作量を口ータリーエンコーダで検出し,
操作量に応じ車輪回転数を変化させることで左右旋
の効果について,正確なデータ取りは行っていない
回を行う.今回の製作は,実.験用モデルであることか
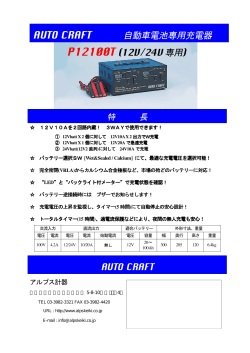
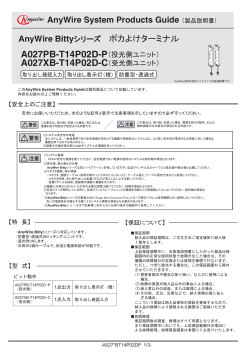
3.1 駆動源システム
太陽光発電システムとニッケル水素ノやy テリ
(24V6.7A X 5 台)をダイオード接続により行う.ま
が,晴天時の走行テストで約2割程度は走行距離の
ら;実機上で様々なパラメータ設定が可能なように,
アツプが見込めそうである.次年度は,晴天時,曇天
タッチパネルを搭載して行っている.
次等での本システムの有効性についての検証データ
走行テストでは,持ち上げ機構の脆弱性と接地部
分の安定化及びモータ軸の取り付け精度を含むモー
夕性能に問題点が見られた.また,左右旋回時の回転
数設定にも問題が見られた.次年度では,これらの問
題を解決すべくセンター設置のCAE等も用い,解
を取ることにしている
24V
6
01
D7
02
0θ
D3
D9
D4
10
05
為岫1
析を行いながら改良を加えていく
S01
0
24V
2
2
BTI
24V
BT2
2
24V
2
BT3
24V
2
24V
BT4
2
33 姿勢安定化機構
日T5
下肢障害者による不整地走行上,安定化に2点か
ら取り組んだ.1つはサスペンション機能であり,後
GND
1つはドライバーの姿勢安定化である.サスペン
図3 太陽電池とニッケル水素電池回路
シヨンについては,スプリング機能,ダンパー機能,
軸受け機能を併せ持つラバースプリングを採用し,
姿勢安定化では,傾斜センサーとモータ3台の制御
32 駆動機構
不整地走行を前提としていることから,4輪にダ
イレクトドライブモータを取り付けた.モータは定
により行う.3台のモータはそれぞれ重心位置調整
用,前後傾斜調整用と左右傾斜調整用である.次年度
では,実際の不整地走行テストや簡易テストコース
格出力 120W,定格トルク 19.1N ・ m,瞬問最大トル
クフ6.4 N ・ m,定格回車云数60 r p mのホイールイン
での走行実験を行い,姿勢安定制御の応答性やドラ
イバーにとっての安心、感等について検証を行ってぃく
{下】
一戸,,
(上)
々
.
ヨ 4 之
3
,6 '
E二区tご_U
ユ,0
5
丁 00
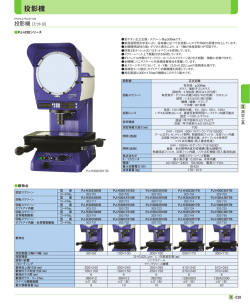
①タイヤ ML2.3.50-10 4ケ/台
②モータEMU 4ケ/台
「
L.、__
③サスペンションDR-A.38×80 4ケ/台
④段差乗越用シリンダMMP3 2ケ/台
⑤段差乗越用タイヤ 4ケ/台
図5
図4 駆動系・フレーム図面
-115-
姿勢安定化機構図面
﹁1.
..゛
0ON-
゛゛
戸乃'〒「
3.4 危険予知システム
4.おわりに
本体の先端部に左右,中央の3ケ所に超音波セン
本研究は,NED0の「エネルギー使用合理化在宅福
サを設置し,進行方向に存在する凹凸等を予知し,ド
祉機器システム開発助成」の補助事業として,また福
岡・佐賀・長崎の九州北部3県での共同研究開・発事業
として3力年計画で取組んでいる課題である
ライバーに音や光等で知らせると共に,減速または
停止の操作を自動で行う.今回は,プリント基板の製
作,車いす本体ヘの設置,走行制御との連結を行っ
最終年度にあたる次年度については,今回製作し
た.凹凸のある簡易テストコースでの走行実'験では,
た試作モデルの課題を解決し,開発コンセプトであ
凹凸の予知及び危険回避(ドライバーへの伝達・減
速)について良好な結果を得た.次年度では,予知精
る不整地走行,省エネルギーを実現する最終モデル
の設計開発に取組む
度の向上と予知範囲の再検討を行い,実際の不整地
走行や簡易テストコースでの走行実験を行い実用化
本研究開発を行うに当たり,設言十・試作に御協力を
頂いた「テクノエイド研究会」会員の(株)戸上電機
を目指す
製作所,仟知山口電機製作所,(株)中村電機製作所,
(株)千代田電子製作所,(株)大橋,(有)佐賀プラ
ントエ業に感謝しますと共に,技術的助言を頂いた
田,宅、
'"驫暴澀.、.ふ^矯ユ達"^
長崎大学石松教授,佐賀大学信太教授・渡辺教授に謝
意を表します
鶴鵡
ノ
縛
豊覇基誘ひ
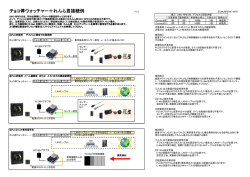
図6
,'^
図7
超音波距離計の基板
、.、
超音波センサ(送信部と受信部)
3.5 全体制御
3 5の制御を条件設定やパラメータ設定の便宜
上シーケンサを用いて行った.次年度では,上記実験
過程で得られた知見等を基に条件設定やパラメータ
設定を固定化し,1チップマイコンへの移植を検討
する
一Ⅱ6-
© Copyright 2026 Paperzz