SPC-10-009
PWM ホールドモデルに基づく過変調領域での IPMSM の制御法
―ロバスト性の検討とアンチワインドアップ制御との比較―
宮島孝幸∗ ,藤本博志(横浜国立大学),藤綱雅己(株式会社デンソー)
Control Method for IPMSM Based on PWM Hold Model in Overmodulation Range
-Study on Robustness and Comparison with Anti-Windup ControlTakayuki Miyajima∗ , Hiroshi Fujimoto (Yokohama National University)
Masami Fujitsuna (DENSO CORPORATION)
Abstract
IPMSM is employed for EV’s motor. Therefore, the control method in overmodulation range of inverter is important for high torque tracking characteristic and expanding operation range of IPMSM. We proposed the control
method based on perfect tracking control and PWM hold model in overmodulation range. In this paper, we develop
a method for improving robustness and compare the proposed method with a control method using anti-windup
control. Finally, simulations and experiments are performed to show the advantages of the proposed method.
キーワード:埋込磁石同期モータ,過変調領域,PWM ホールドモデル,完全追従制御
(IPMSM, overmodulation range, PWM hold model, perfect tracking control )
1. はじめに
永久磁石同期モータは高効率・保守性が高いことから産
業界で広く用いられている。特に本稿で取り上げている埋
込磁石同期モータ (IPMSM) は電気自動車の主機モータな
どに用いられており,広い駆動領域,高い追従特性が必要
となる。
これらの実現には高い出力電圧が要求されるため,イン
バータの線形領域だけではなく過変調領域でも制御するこ
とが必要不可欠となる。文献 (1) では変調率に応じて電流
ベクトル制御器と矩形波電圧位相制御器の 2 つの制御則を
切り替えることで,過変調領域での PMSM の制御を実現し
ている。また,弱め磁束制御と同時にアンチワインドアッ
プ制御を行う手法 (2) ,モデル予測制御による制御法 (3) ,過
変調領域で生じる高調波電流による追従特性の劣化を抑圧
する手法 (4) (5) なども提案されている。
著者らは PWM ホールドモデル (6) と完全追従制御 (7) に
よる過変調領域での単一制御則による制御の実現と追従特
性の改善を提案した (8) 。さらにノミナル出力の推定により,
高調波電流による制御特性の劣化と出力電圧基本波成分の
飽和によるワインドアップ現象を同時に抑圧する手法を提
案した (9) 。基本波成分の飽和は,飽和関数をかけた FF 制
御器出力でノミナル出力を推定することで電圧制限楕円を
考慮し,その領域内で駆動させることでワインドアップを
発生させないものであった。このためモデル化誤差により,
駆動領域が減少 (電圧制限が過剰),またはワインドアップ
現象 (電圧制限が不足) を引き起こす恐れがある。
本稿では,直流電源電圧を補正することで電圧制限楕円
の誤差を抑圧する手法について提案し,ノミナルインダク
タンスに誤差がある状態とパラメータ推定機構 (10) による
推定値を用いて誤差を抑圧した状態の結果からロバスト性
の検討を行う。さらに,アンチワインドアップ制御を用い
る手法と電圧制限楕円を考慮する本手法との比較をシミュ
レーション・実験結果から行い,提案法の有効性を確認する。
2. IPMSM のモデルと離散化
〈2・1〉 IPMSM の dq 座標系モデル
IPMSM の dq
T
座標における電圧方程式を u = [vd vq ] , y = x =
[id iq ]T となる状態方程式で表すと式 (1), (2), (3) となる。
{
ẋ(t) = Ac (ωe )x(t)+B c u(t) −
[
0
ωe K e
]T }
· · (1)
y(t) = C c x(t) · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (2)
[
]
Ac (ωe ) B c
Cc
0
L
− LRd
d
= −ωe L
Lq
I
ωe Ldq
− LRq
1
Ld
0
0
1
Lq
(3)
0
ただし,vd, q : d, q 軸電圧,R: 電機子巻線抵抗,Ld, q : d,
q 軸インダクタンス (Ld ̸= Lq ),ωe : 電気角速度,id, q : d,
q 軸電流,Ke : 誘起電圧定数である。また,トルク T は式
(4) で与えられる。
T = Kt iq + Krt id iq · · · · · · · · · · · · · · · · · · · · · · · · · · · (4)
ただし,Kt = P Ke ,Krt = P (Ld −Lq ),P : 極対数である。
〈2・2〉 IPMSM の PWM ホールドモデル
式 (1) を
PWM ホールドに基づいて離散化する (6) 。ここで,1 サン
プル点間の速度変動が無視できるほど小さいと仮定すると,
干渉項 ωe Ke は幅 Tu のパルスとみなせる。この仮定の下,
Vdc を三相インバータ直流電源電圧として PWM ホールド
に基づき離散化を行うと,式 (5), (6), (7) を得る。ただし,
∆T = [∆Td ∆Tq ]T (∆Td, q : d, q 軸電圧 ON 時間) とする。
1/6
Decoupling Control
iref
d [k]
iref
q [k]
+
+
Cd [z]
Cq [z]
−
Fig. 1.
T ref [k]
+
r[k] = xd[k + 1]
+ vdref [k]
dq
+
−
+
+
vqref [k]
uvw
vuref [k]
vvref [k]
ref
[k]
vw
IPMSM
+
INV
r(t)
iu [k]
iw [k] uw
θe [k] dq
id [k]
δ[k]
Cδ [z]
Voltage
Calculator
−
T̂ [k]
Torque
id [k]
IPMSM
+
INV
iu [k]
iw [k]
θe [k]
{
+B s (ωe )
[
∆T [k] − 0
ωe Ke Tu
Vdc
]T}
· · · (5)
y[k] = C s x[k] · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (6)
Tu
As (ωe ) = eAc (ωe )Tu , B s (ωe ) = eAc (ωe ) 2 B c Vdc ,
vdref [k] = vd′
ref
[k] − ωe [k]Lq iq [k] · · · · · · · · · · · · · · · (8)
vqref [k] = vq′
[k] + ωe [k](Ld id [k] + Ke ) · · · · · · · (9)
Ld, q s + R
Cd, q (s) =
, τ = 10Tu · · · · · · · · · · · · · (10)
τs
ref
矩形波電圧位相制御のブロック図を図 2 に示す。本稿で
は,電圧位相制御器 Cδ [z] を比例ゲインが 0.15,積分ゲイ
ンが 30 の PI 制御器とし,周期 Tu で Tustin 変換により離
散化したものとした。
電流ベクトルから電圧位相制御への切り替えは dq 座標
√
の電圧ベクトルの大きさが 32 V2dc × 1.1 となった場合に切
り替える。この際,現在の電圧位相から電圧位相制御器の
初期値補償を行う。また,電流ベクトル制御への切り替え
√3 V
dc
は電流ベクトル制御での電圧ベクトルの大きさが
2 2
となるようなトルク指令値・角速度の場合に切り替える。
〈3・2〉 完全追従制御法
提案法に用いている完全追
(7)
従制御法 (PTC)
は図 3 に示すように FF 制御器 C 1 [z]
と FB 制御器 C 2 [z] を有する 2 自由度制御系の構造をして
いる。FF 制御器はプラントの安定な逆システムとなって
おり,ノミナルプラントに対してはサンプル点上で完全に
θe + ∆θe
+ ∆T f f [k]
B (ωe )(I − z A(ωe ))
+
C 1[z]
−1
i0[k]
z −1
(Proposed 1)
Fig. 4.
+
Tu
I
Vdc
C 2[z]
e[k]
−
+
IPMSM
+
INV
HPWM
(SVM)
∆T ′ [k]
Anti - windup
control
θe
i[k]
dq
uw
S
(Tu )
図 4 提案法 1
Block diagram of proposed method 1.
∆T̃ [k]
∆T [k]
+
∆T ′ [k]
Fig. 5.
+ ∆T [k]
NOE
i∗0 [k]
C s = C c · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (7)
3. 制御系設計
本稿では電流ベクトル制御器と矩形波電圧位相制御器の
切り替えによる制御法を従来法 (1) とする。また,完全追従
制御法,高調波電流推定,文献 (11) のアンチワインドアッ
プ制御から構成されるものを提案法 1,文献 (9) のものを提
案法 2,提案法 2 に電圧制限楕円の誤差を抑圧する手法を
加えたものを提案法 3 とする。
〈3・1〉 従 来 法
電流ベクトル制御のブロック図を図
1 に示す。式 (8), (9) の非干渉制御を行い,FB 制御器を式
(10) の極零相殺型の PI 制御器 Cd, q (s) とする。これを周
期 Tu で Tustin 変換により離散化した Cd, q [z] を用いる。
e[k]
−
S
y[k] (Tu )
+
y 0[k]
[0 ωe KeTu /Vdc]T
−1
図 2 矩形波電圧位相制御
Block diagram of voltage phase control.
x[k + 1] = As (ωe )x[k]
y(t)
P c (s)
図 3 多入力多出力システムにおけるシングルレート PTC
Fig. 3. Singlerate perfect tracking control system of
multi-input multi-output system.
iref [k] =
xd[k + 1]
uw
+
PLANT
C 2[z]
D
+
z −1 C
u[k]
+ +
C 1[z]
Estimator iq [k] dq
Fig. 2.
u0[k]
B −1 (I − z −1 A)
iq [k]
図 1 電流ベクトル制御
Block diagram of current vector control.
vuref [k]
vvref [k]
ref
[k]
vw
S
(Tu )
∆To[k]
= ∆Tf f [k]
−
HPF
∆Th [k] +
+
i∗0 [k]
PWM
Hold
Model
図 5 ノミナル出力推定器 (提案法 1)
Nominal output estimator of proposed method 1.
追従誤差が零になることが補償されている。FB 制御器は
外乱やプラント変動がある場合に追従誤差を抑圧する。本
稿ではプラントが 1 次であるため,シングルレート制御で
PTC が実現できる。
式 (11) の離散時間状態方程式を用いて,1 サンプル先の
状態変数 xd [k+1] を入力とする制御対象の安定な逆システ
ム,ノミナル出力 y 0 [k] は式 (12), (13) で求まる。
x[k + 1]= Ax[k] + Bu[k], y[k] = Cx[k] · · · · · · (11)
u0 [k]= B −1 (I − z −1 A)xd [k + 1] · · · · · · · · · · · (12)
y 0 [k]= z −1 Cxd [k + 1] + Du0 [k] · · · · · · · · · · · (13)
〈3・3〉 提 案 法 1
IPMSM の PWM ホールドモデル
の逆システムから PTC を構成し,出力電圧基本波成分の
飽和はアンチワインドアップ制御,高調波電流の影響はノ
ミナル出力の推定によって補償すると,提案法 1 は図 4 と
なる。なお,線形領域での制御入力導出法は文献 (12) の厳
密法を用い,過変調領域での制御入力導出法は文献 (9) の
手法を用いる。また,∆θe は座標変換における離散化誤差
の補償値である (13) 。
各飽和関数は位相優先のリミッタであり,∆T̃ では式 (14)
のように計算される。
{
∆T̃ =
∆T
|∆T |
∆T
√3 2
2 π
Tu
if |∆T | >
otherwise
√3 2
2 π
Tu
· (14)
ノミナル出力推定器 (Nominal output estimator: NOE)
は図 5 となる。ノミナル出力推定器では高調波成分を含ん
だノミナル出力を推定する。高調波成分の推定誤差により
制御入力が振動した場合,高調波成分 ∆T h には直流分が
生じてしまう。そこで,この直流分を抑圧するために HPF
2/6
iref [k] =
xd[k + 1]
θe + ∆θe
[0 ωe KeTu /Vdc]T
+
B −1(ωe )(I − z −1 A(ωe ))
+
∆T f f [k] + ∆T [k] H
PWM
(SVM)
+
C 1[z]
i0[k]
z −1
Tu
I
Vdc
i∗0 [k]
∆T [k]
∆T ′ [k]
Fig. 7.
∆T ′ [k]
C 2[z]
e[k]
−
C∆V dc[z]
∆Vdc[k]
iref [k] =
xd[k + 1]
NOE
(Proposed 2)
Fig. 6.
IPMSM
+
INV
dq
uw
+
B (ωe )(I − z A(ωe ))
+
∆To[k]
= ∆Tf f [k]
−
HPF
+
+
i∗0 [k]
図 7 ノミナル出力推定器 (提案法 2)
Nominal output estimator of proposed method 2.
を用いる。本稿ではカットオフ周波数を 60 [rad/s] とした。
また,過変調領域から線形領域に推移した場合には PWM
ホールドモデルの状態変数を目標軌道に置き換え,FB 制
御器により高調波成分を減衰させる。
文献 (5) によると,過変調領域では高調波電流の補償の
上で誤差を修正するアンチワインドアップ制御 (11) が好ま
しい。誤差修正のアンチワインドアップ制御は FB 制御器
の状態変数更新時に式 (15), (16) のように計算するもので
ある。
xf bd [k + 1] = xf bd [k] + Bf bd eid [k]
Bf bd Vdc
−
(∆Td [k] − ∆T̃d [k]) · · · (15)
Df bd Tu
xf bq [k + 1] = xf bq [k] + Bf bq eiq [k]
Bf bq Vdc
−
(∆Tq [k] − ∆T̃q [k]) · · · · (16)
Df bq Tu
ここで,Bf bd , Bf bq , Df bd , Df bq は d, q 軸電流 FB 制御器
の B, D 行列,xf bd , xf bq , eid , eiq は d, q 軸電流 FB 制御
器の状態変数,電流誤差である。また,FB 制御器の出力
による飽和だけの電流誤差に換算するため,FF 制御器の
出力 ∆T f f にもリミッタを設ける。
〈3・4〉 提案法 2 (9)
提案法 2 のブロック図を図 6 に
示す。また,提案法 2 のノミナル出力推定器の図 7 に示す。
出力電圧に十分な余裕が無い場合には,アンチワインド
アップ制御では追従特性が劣化する恐れがある。そこで,提
案法 2 ではアンチワインドアップ制御を行わず,ノミナル
出力推定に用いる基本波成分 ∆T o に飽和関数を設け,電
圧制限楕円を考慮する。これにより電圧制限内で駆動する
ように制御するため,ワインドアップ現象は発生せず,FB
制御器の状態変数を操作する必要が無い。
〈3・5〉 提 案 法 3
提案法 2 では,ノミナル出力推定
器が想定している電圧制限楕円に誤差が生じたとき,電圧
制限が過剰となる場合には駆動領域が減少し,電圧制限が
不足となる場合にはワインドアップを引き起こす恐れがあ
る。そこで,この誤差を電圧制限楕円の要素の一つである
直流電源電圧に置き換え抑圧する。
提案法 3 のブロック図を図 8 に示す。FF 制御器の出力の
+
Tu
I
Vdc
NOE
i0[k]
z −1
Fig. 8.
PWM
Hold
Model
+
(Proposed 2)
i∗0 [k]
∆T˜o[k]
∆Th [k]
+
C 1[z]
S
(Tu )
ABS θ + ∆θ
e
e
∆T f f [k]
−1
図 6 提案法 2
Block diagram of proposed method 2.
∆T̃ [k]
+
ABS
[0 ωe KeTu /Vdc]T
−1
θe
i[k]
+
−
Vdc
Tu
C 2[z]
e[k]
+
−
HPWM
(SVM)
IPMSM
+
INV
∆T [k]
∆T ′ [k]
θe
i[k] dq
uw
S
(Tu )
図 8 提案法 3
Block diagram of proposed method 3.
絶対値 |∆T f f | と FB 制御器の出力を含んだ制御入力の絶
対値 |∆T | の誤差から PI 制御器 C∆Vdc [z] で ∆Vdc を計算
し,ノミナルな直流電源電圧を Vdcn = Vdc + ∆Vdc として
ノミナル出力推定器,FF 制御器を更新する。C∆V dc [z] は
動作点における電圧制限楕円の誤差を零にする方向に働き,
電流 FB 制御器を操作しないという特徴をもつが,モデル
ベース設計が不可能という欠点もある。本稿では比例ゲイ
ンを 0.001,積分ゲインを 1000 とし,周期 Tu で Tustin 変
換した。
〈3・6〉 パラメータ推定機構 (10)
本稿で用いるパラ
メータ推定機構には逐次型最小二乗法を用い,条件付更新
を行うことによりロバスト化する。レグレッサ ’ が PE 性
を満足するとき,逐次型最小二乗法の更新式により推定値
を更新し,条件に満たないときは更新しない。逐次型最小
二乗法の更新式は以下のようになる。
ˆ
ˆ − 1]
„[k]
= „[k
{
}
ˆ − 1]) (17)
+ Proj ˆ K[k](η[k] − ’[k]T „[k
„
P [k − 1]’[k]
K[k] =
· · · · · · · · · · · · (18)
λ + ’T [k]P [k − 1]’[k]
P [k] = (I − K[k]’[k]T )P [k − 1]/λ· · · · · · · · (19)
0
Projθ̂ (´j ) :=
0
´j
if θ̂j ≥ θmax &´j > 0
if θ̂j ≤ θmin &´j < 0
otherwise
· · · · · · (20)
ˆ が推定値である。
ここで,’, η は既知の信号ベクトル,„
また,λ は忘却係数である。
本稿では,式 (21)∼(24) のように定常状態の電圧方程式
を基に θq = Ld , θd = Lq を推定する。なお,λ = 0.99,
ωc = 100 [rad/s] とした。
ωc
(vd − Rid ) · · · · · · · · · · · · · · · · · · · · · ·
s + ωc
ωc
(−ωe iq ) · · · · · · · · · · · · · · · · · · · · · · · ·
ηd =
s + ωc
ωc
φq =
(vq − Riq − ωe Ke ) · · · · · · · · · · · · · ·
s + ωc
ωc
ωe id · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
ηq =
s + ωc
φd =
(21)
(22)
(23)
(24)
4. シミュレーション
シミュレーションで用いたモータパラメータを表 1 に示
す。三相インバータの直流電源電圧は Vdc = 36 [V],制御周
期は Tu = 0.1 [ms] とした。また,∆θe = 0.5ωe Tu とした。
3/6
4
3
3
3
3
2
1
0
0
^
T
Tref
flag
1
2
1
^
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
2
1
^
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
^
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
4
4
4
4
3
3
3
3
2
1
2
1
0.32
0.33
0.34
Time [s]
0.35
0.36
0.31
0.32
0.33
0.34
Time [s]
0.35
T
T0
0
0.36
(f) Torque (Proposed 1)
0.31
0.32
0.33
0.34
Time [s]
0.35
0.12
0.12
0.1
0.1
0.1
0.08
0.06
0.08
0.06
0.04
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0.04
0
(i) |∆T | (Proposed 1)
表1
Table 1.
0.36
(g) Torque (Proposed 2)
0.12
Input [ms]
Input [ms]
(e) Torque (Conventional)
0.1
0.2
0.3
Time [s]
0.4
0.5
2
1
^
T
T0
0
Input [ms]
0.31
1
^
^
T
Tref
0
2
T
T0
(d) Torque (Proposed 3)
Torque [Nm]
(c) Torque (Proposed 2)
Torque [Nm]
(b) Torque (Proposed 1)
Torque [Nm]
(a) Torque (Conventional)
Torque [Nm]
2
Torque [Nm]
4
Torque [Nm]
4
Torque [Nm]
Torque [Nm]
4
^
T
T0
0
0.31
0.32
0.33
0.34
Time [s]
0.35
0.36
(h) Torque (Proposed 3)
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
(j) |∆T | (Proposed 2)
0.5
0.04
0
0.1
0.2
0.3
Time [s]
0.4
0.5
(k) |∆T | (Proposed 3)
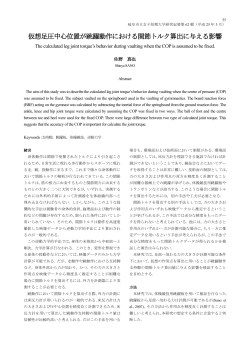
図 9 Ldn = 0.7Ld , Lqn = 0.7Lq (シミュレーション)
Fig. 9. Ldn = 0.7Ld , Lqn = 0.7Lq (Simulations).
IPMSM パラメータ
制御により追従特性が劣化している。また,推定値を用い
Parameters of IPMSM.
た場合には特性は改善されているが,同様にアンチワイン
d-axis Inductance Ld
0.738 [mH]
q-axis Inductance Lq
2.08 [mH]
Resistance R
154.9 [mΩ]
Pairs of poles P
3
EMF constant Ke
45.86 [mV/(rad/s)]
従来法の “flag” は制御器切り替え信号であり,“High” の
とき矩形波電圧位相制御,“Low” のとき電流ベクトル制御
を行う。T̂ は実電流から式 (2) を用いて算出したトルクであ
り,提案法の T0 は 1 サンプル遅れの目標軌道 i0 から求め
たノミナルトルクである。また,提案法の過変調領域は図
9(i) のように点線間の領域 (0.0707 ∼ 0.0780 [ms]) である。
時刻 t = 0.25 [s] までの間,FF 制御器のノミナルインダク
タンス Ldn, qn を Ldn, qn = 0.7Ld, q 又は Ldn, qn = 1.3Ld, q
とし,t = 0.18 [s] までの間にインダクタンスを推定する。
t = 0.25 [s] 以降は,インダクタンス推定値 L̂d, q を用いて
制御を行う。また,d, q 軸電流指令値は矩形波駆動となる
値とし,速度は 2000 [rpm] とした。
Ldn, qn = 0.7Ld, q の場合のシミュレーション結果を図 9
に示す。図 9(e)∼9(h) は推定値を用いた場合の立ち上がり
時の拡大図である。
従来法はほぼ電圧位相制御で制御しており,立ち上がり
時の追従特性が悪い。提案法 1 はパラメータ推定時には FF
制御器の出力が不足しているため FB 制御器が働く。この
とき,出力電圧に余裕が無いため,アンチワインドアップ
ドアップ制御により追従特性が劣化している。提案法 2 は
推定区間において,過渡応答時の電圧制限楕円の誤差によ
りワインドアップ現象が発生している。また,推定値を用
いた場合でも同様の傾向となっていることからロバスト性
は低いといえる。一方,提案法 3 は ∆Vdc による直流電源
電圧の補正は追従特性を考慮していないため,追従特性は
改善できていないが,ワインドアップ現象は発生しておら
ずロバスト性を改善している。また,アンチワインドアッ
プ制御を用いた提案法 1 よりも良い追従特性が得られてい
ることが確認できる。
Ldn, qn = 1.3Ld, q の場合のシミュレーション結果を図 10
に示す。
この場合,推定区間において FF 制御器の出力は過大な
値となっており,FB 制御器は制御入力を小さくするよう
に働く。このためアンチワインドアップ制御による追従特
性への影響は少なく,提案法 1 の追従特性の劣化は少ない。
また,提案法 2 ではノミナル出力推定器の電圧制限が過剰
となっているためパラメータ推定時にはオフセットが生じ
ている。一方,提案法 3 では追従特性は提案法 1 には劣る
ものも,∆Vdc による直流電源電圧の補正により電圧制限
の誤差を抑圧し,ロバスト性を改善している。
5. 実
験
シミュレーションと同様の項目について実験を行った。
実験ではエンコーダ分解能等により推定誤差が生じるため,
4/6
4
3
3
3
2
1
2
1
^
0
0
2
1
^
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
(a) Torque (Proposed 1)
^
T
T0
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
(b) Torque (Proposed 2)
0.1
0.12
0.1
0.1
0.1
0.06
0.04
0
Input [ms]
0.12
0.08
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
0.04
0
0.5
(d) |∆T | (Proposed 1)
0.2
0.3
Time [s]
0.4
0.5
(c) Torque (Proposed 3)
0.12
Input [ms]
Input [ms]
Torque [Nm]
4
Torque [Nm]
Torque [Nm]
4
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
0.04
0
0.5
(e) |∆T | (Proposed 2)
0.1
0.2
0.3
Time [s]
0.4
0.5
(f) |∆T | (Proposed 3)
4
4
3
3
3
2
1
0
0
^
T
Tref
flag
0.1
1
2
1
^
0.2
0.3
Time [s]
0.4
0.5
0
2
1
^
T
T0
0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
^
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
0
4
4
3
3
3
3
2
1
2
1
0.32
0.33
0.34
Time [s]
0.35
0.36
0.31
0.32
0.33
0.34
Time [s]
0.35
T
T0
0
0.36
(f) Torque (Proposed 1)
0.31
0.32
0.33
0.34
Time [s]
0.35
0.12
0.12
0.1
0.1
0.1
0.08
0.06
0.04
0
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
(i) |∆T | (Proposed 1)
0.5
0.04
0
0.36
(g) Torque (Proposed 2)
0.12
Input [ms]
Input [ms]
(e) Torque (Conventional)
0.1
0.2
0.3
Time [s]
0.4
0.5
2
1
^
T
T0
0
Input [ms]
0.31
1
^
^
T
Tref
0
2
T
T0
(d) Torque (Proposed 3)
Torque [Nm]
(c) Torque (Proposed 2)
4
Torque [Nm]
(b) Torque (Proposed 1)
4
Torque [Nm]
(a) Torque (Conventional)
Torque [Nm]
2
Torque [Nm]
4
3
Torque [Nm]
4
Torque [Nm]
Torque [Nm]
図 10 Ldn = 1.3Ld , Lqn = 1.3Lq (シミュレーション)
Fig. 10. Ldn = 1.3Ld , Lqn = 1.3Lq (Simulations).
^
T
T0
0
0.31
0.32
0.33
0.34
Time [s]
0.35
0.36
(h) Torque (Proposed 3)
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
(j) |∆T | (Proposed 2)
0.5
0.04
0
0.1
0.2
0.3
Time [s]
0.4
0.5
(k) |∆T | (Proposed 3)
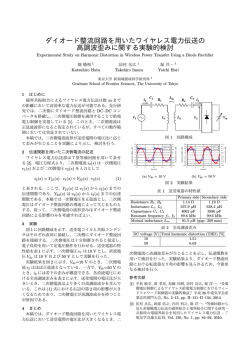
図 11 Ldn = 0.7Ld , Lqn = 0.7Lq (実験)
Fig. 11. Ldn = 0.7Ld , Lqn = 0.7Lq (Experiments).
定常状態で出力電圧に余裕がある状態で行った。また,演
算時間を考慮し,∆θe = 0.9ωe Tu とした。
Ldn, qn = 0.7Ld, q の場合の実験結果を図 11 に示す。
従来法はシミュレーションと同様に立ち上がり時の追従
特性が悪い。電圧余裕がある状態のため,アンチワインド
アップ制御を行う提案法 1 の追従特性の劣化は少ない。ま
た,提案法 2 はモデル化誤差によりワインドアップ現象が
発生している。一方,提案法 3 はワインドアップが発生せ
ず,差は少ないが提案法 1 よりも良い追従特性が得られて
おり,有効性が確認できる。
Ldn, qn = 1.3Ld, q の場合の実験結果を図 12 に示す。
推定区間において提案法 1 は FF 制御器の過剰な出力を
減少するように FB 制御器が働くため追従特性の劣化は少
ない。提案法 2 はモデル化誤差により過剰な電圧制限とな
り,指令値に追従できていない。一方,提案法 3 は ∆Vdc
による補正により電圧制限楕円の誤差を抑圧し,指令値に
追従している。
6. ま と め
本稿では文献 (9) で提案した電圧制限楕円を考慮する手
5/6
4
3
3
3
2
1
Torque [Nm]
4
Torque [Nm]
Torque [Nm]
4
2
1
^
0
0
1
^
T
T0
0.1
0.2
0.3
Time [s]
0.4
0.5
^
T
T0
0
0
(a) Torque (Proposed 1)
T
T0
0
0.1
0.2
0.3
Time [s]
0.4
0.5
(b) Torque (Proposed 2)
0
0.1
0.12
0.1
0.1
0.1
0.06
0.04
0
Input [ms]
0.12
0.08
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
(d) |∆T | (Proposed 1)
0.5
0.04
0
0.2
0.3
Time [s]
0.4
0.5
(c) Torque (Proposed 3)
0.12
Input [ms]
Input [ms]
2
0.08
0.06
0.1
0.2
0.3
Time [s]
0.4
(e) |∆T | (Proposed 2)
0.5
0.04
0
0.1
0.2
0.3
Time [s]
0.4
0.5
(f) |∆T | (Proposed 3)
図 12 Ldn = 1.3Ld , Lqn = 1.3Lq (実験)
Fig. 12. Ldn = 1.3Ld , Lqn = 1.3Lq (Experiments).
法 (提案法 2) に対し,電圧制限楕円の誤差を直流電源電圧
の補正によって抑圧する手法を提案した。この手法を用い
た提案法 3 のロバスト性の改善をシミュレーション・実験
で確認した。また,アンチワインドアップ制御を行う提案
法 1 のように追従特性を劣化することが無く,適切な飽和
時の処理が行うことを確認した。
本稿では,制御入力が飽和している区間では目標電流軌
道を操作していなかった。このため,プラントの自由応答
により振動的なトルク応答となっていた。今後は,飽和し
ている区間で目標電流軌道を操作し,トルク追従特性を改
善する。
参考文献
( 1 ) H. Nakai, H. Ohtani, E. Satoh, and Y. Inaguma: “Development and Testing of the Torque Control for the
Permanent-Magnet Synchronous Motor”, IEEE Trans.
Ind. Electron., Vol. 52, No. 3, pp. 800–806 (2005)
( 2 ) T.-S. Kwon, G.-Y. Choi, M.-S. Kwak , and S.-K Sul
: “Novel Flux-Weakening Control of an IPMSM for
Quasi-Six-Step Operation”, IEEE Trans. Ind. Appl.,
Vol.44, NO.6, pp. 1722–1723 (2008)
( 3 ) H. Kobayashi, H. Kitagawa, S. Doki and S. Okuma
: “Realization of a Fast Current Control System of
PMSM based on Model Predictive Control”, The 34th
Annual Conference of the IEEE Industrial Electronics
Society, Florida, pp. 1343–1348 (2008)
( 4 ) A. M. Khambadkone and J.Holtz: “Compensated
Synchronous PI Current Controller in Overmodulation Range and Six-Step Operation of Space-VectorModulation-Based Vector-Controlled Drives”, IEEE
Trans. Ind. Electron., Vol. 49, No. 3, pp. 574–580
(2002)
( 5 ) S. Lerdudomsak, S. Doki, and S. Okuma: “Steady
State Error and Solving Method for PMSM Current
Control System in Overmodulation Range”, The 2008
NATIONAL MEETING RECORD I.E.E.JAPAN, Vol.
4, pp. 161–162 (2008)(in Japanese)
( 6 ) K. P. Gokhale, A. Kawamura, and R. G. Hoft: “Deat
beat microprocessor control of PWM inverter for sinusoidal output waveform synthesis”, IEEE Trans. Ind.
Appl., Vol. 23, No. 3, pp. 901–910 (1987)
( 7 ) H. Fujimoto, Y. Hori, and A. Kawamura: “Perfect
Tracking Control based on Multirate Feedforward Control with Generalized Sampling Periods”, IEEE Trans.
Ind. Eletron., Vol. 48, No. 3, pp. 636–644 (2001)
( 8 ) T. Miyajima and H. Fujimoto: “Proposal of Control
Method of IPM Motor Based on PWM Hold Model
in Overmodulation Range”, IEE of Japan Technical Meeting Record, SPC-09-27, pp. 37–42 (2009)(in
Japanese)
( 9 ) T. Miyajima, H. Fujimoto, and M. Fujitsuna: “Proposal of Control Method with Perfect Tracking Control Method Considering Saturation of Control Input and PWM Hold Model in Overmodulation Range
for IPMSM”, JIASC2009, pp. I-419–424 (2009)(in
Japanese)
(10) H. Fujimoto and Y. Bin: “Multirate Adaptive Robust
Control for Discrete-Time Non-Minimum Phase System and Application to Linear Motors”, IEEE/ASME
Trans. Mechatronics, Vol. 10, No. 4, pp. 371–377 (2005)
(11) K. Ohishi, E. Hayasaka, T. Nagano, and H. Masaya:
“Speed Servo System Considering Voltage Saturation
of Indirect Vector Control System”, T.IEEJapan, Vol.
122-D, No. 2, pp. 120–127 (2002)(in Japanese)
(12) K. Sakata and H. Fujimoto: “Perfect Tracking Control
of Servo Motor Based on Precise Model with PWM
Hold and Current Loop”, The Forth Power Conversion
Conference, Nagoya, pp.1612–1617 (2007)
(13) J. Kudo, T. Noguchi, M. Kawakami, and K. Sano:
“Mathematical Model Errors and Their Compensations of IPM Motor Control System”, IEE of Japan
Technical Meeting Record, IEE Japan, SPC-08-25, pp.
25-31 (2008)(in Japanese)
6/6
© Copyright 2026 Paperzz